Реверс электродвигателя | Заметки электрика
Приветствую Вас, уважаемые гости сайта «Заметки электрика».
Сегодня я Вам расскажу про реверс электродвигателя.
В данной статье Вы познакомитесь со схемой реверса электродвигателя, а также узнаете как она работает. А в конце я снял для Вас специальный видео-ролик, где покажу Вам принцип работы схемы реверса электродвигателя на специальном стенде.
В процессе эксплуатации трехфазного асинхронного электродвигателя возникают моменты, когда необходимо изменить вращение вала электродвигателя. Чтобы осуществить задуманное, мы подключаем электродвигатель по схеме реверса.
Что нам для это потребуется?
- Вводной питающий автомат — в данном примере я использовал автоматический выключатель марки АП-50 с номинальным током 4А
- Контакторы или магнитные пускатели в количестве 2 штуки
- Кнопочный пост с 3 кнопками (красная — «стоп», черные — «вперед», «назад»)
- Тепловое реле
- Асинхронный электродвигатель
В моем примере (видео) отсутствует тепловое реле и сам электродвигатель, т.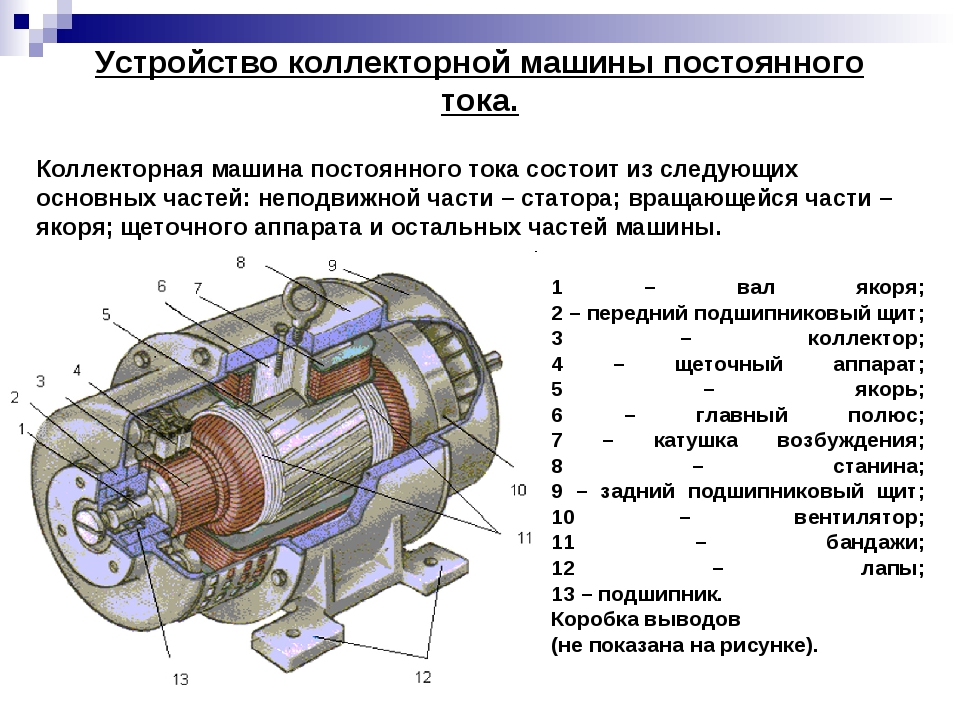 к. данный стенд предназначался для тренировки для студентов колледжей по сборке схемы реверса электродвигателя без силовой части.
к. данный стенд предназначался для тренировки для студентов колледжей по сборке схемы реверса электродвигателя без силовой части.
Перед тем, как перейти к реверсу электродвигателя рекомендую прочитать и досконально изучить следующие статьи:
А теперь перейдем к реверсу. Чтобы изменить вращение вала (направление) электродвигателя, необходимо изменить чередование (следование) фаз питающего напряжения.
Как это сделать?
Схема реверса электродвигателя
Схема реверса электродвигателя при напряжении сети 220(В) и при напряжении цепей управления 220(В)
Хочу сразу заметить, что следует обращать внимание на уровень напряжение питания электродвигателя (380В или 220В) и напряжение катушек контакторов (380В и 220В).
Ниже смотрите еще 2 схемы реверса электродвигателя с разными номинальными напряжениями.
Схема реверса электродвигателя при напряжении сети 380(В) и при напряжении цепей управления 380(В)
Схема реверса электродвигателя при напряжении сети 380(В) и при напряжении цепей управления 220(В)
В моем примере уровень напряжения силовой цепи составляет 220(В), поэтому контакторы я использую с катушками, соответственно, на 220 (В).

Контакторы КМ1 и КМ2 используем для организации реверса электродвигателя. При срабатывании контактора КМ1 фазировка питающего напряжения будет различаться от фазировки при срабатывании контактора КМ2.
Управление катушками контакторов КМ1 и КМ2 осуществляется кнопками «стоп», «вперед» и «назад».
Давайте рассмотрим принцип работы схемы реверса электродвигателя.
Принцип работы схемы реверса
Контактор КМ1 подтягивается и замыкает свои силовые контакты КМ1.1. Двигатель начинает вращаться в прямом направлении.
Кнопку «вперед» держать не нужно, т.к. катушка контактора КМ1 встает на «самоподхват» через свой же контакт КМ1.3.
Н.о. — нормально-открытый контакт, н.з.
— нормально-закрытый контакт
Для остановки электродвигателя используем кнопку «стоп». Контактами этой кнопки мы разрываем питание катушки («самоподхват») контактора КМ1. Катушка КМ1 теряет питание и контактор КМ1 отпадывает, отключая электродвигатель от сети.
При нажатии кнопки «назад» получает питание катушка контактора КМ2 по цепи: фаза С — н.з. контакт кнопки «стоп» — н.з. контакт КМ1.2 контактора КМ1 — н.о. контакт нажатой кнопки «назад» — катушка контактора КМ2 — фаза В.
Контактор КМ2 подтягивается и замыкает свои силовые контакты КМ2.1. Двигатель начинает вращаться в обратном направлении.
Кнопку «назад» держать не нужно, т.к. катушка контактора КМ2 встает на «самоподхват» через свой же контакт КМ2.3.
В этой схеме выполнена блокировка кнопок от одновременного нажатия, иначе в силовой цепи возникнет короткое замыкание, которое приведет к повреждению электрооборудования. Блокировка выполняется последовательным включением н.з. контакта (блок-контакта) соответствующего контактора.
Силовая цепь схемы реверса электродвигателя снабжена защитным коммутационным вводным автоматическим выключателем АП-50 с номинальным током 4(А). Также желательно выполнить защиту и цепи управления, путем установки автоматических выключателей или предохранителей на фазу В и С.
В примере (видео) защита цепей управления отсутствует.
Существуют заводские сборные контакторы для схем реверса электродвигателя с механической блокировкой в виде перекидного рычажка, который блокирует одновременное включение контакторов.
Если у Вас однофазный двигатель, то схемы приведенные в данной статье не подойдут. Переходите по ссылке, чтобы узнать более подробно о реверсе однофазного двигателя.
В комментариях регулярно пишут, что в данной статье не в полном объеме раскрыта сборка схемы реверса. Исправляюсь и представляю Вашему вниманию пошаговую инструкцию по сборке схемы реверса асинхронного двигателя (переходите по ссылочке). Прочитав эту инструкцию, Вы самостоятельно соберете схему реверса электродвигателя.
P.S. Для более наглядного »живого» примера реверса электродвигателя я приготовил для Вас видео-ролик. Не судите строго. Это мое первое созданное видео на сайте. В дальнейшем буду стараться для каждой статьи добавлять видео-уроки.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Для чего нужен плавный пуск асинхронного двигателя / en-res.
 ru
ruИз всех видов двигателей асинхронные двигатели получили наиболее широкое распространение в промышленности и продолжают вытеснять все больше и больше двигатели постоянного тока.
Асинхронные двигатели получили широкое распространение благодаря следующим своим качествам: дешевизне двигателя, простоте конструкции, надежности, высокому к. п. д. До настоящего времени асинхронные двигатели уступали место двигателям постоянного тока только в тех случаях, где требовалось плавное регулирование частоты вращения (строгальные станки, правильные машины, регулируемые главные приводы прокатных станов и т. п.), в электрическом транспорте и в приводах большой мощности повторно-кратковременного режима (реверсивные станы). Внедрение в промышленность регулируемых преобразователей частоты позволит, еще шире применять асинхронные двигатели.
Недостатками асинхронных двигателей являются:
- Квадратичная зависимость момента от напряжения, при падении напряжения в сети сильно уменьшаются пусковой и критический моменты,
- Опасность перегрева статора, особенно при повышениях напряжения сети, и ротора при понижении напряжения,
- Малый воздушный зазор, несколько понижающий надежность двигателя,
- Большие пусковые токи асинхронных двигателей.
 При пуске асинхронного двигателя с короткозамкнутым ротором ток статора больше номинального в 5 – 10 раз. Такие большие токи в статоре недопустимы по условиям динамических усилий в обмотках и нагрева обмоток. В асинхронных двигателях могут возникать переходные режимы с большими бросками тока не только при подключении двигателя к сети но и при его реверсе и торможении.
При пуске асинхронного двигателя с короткозамкнутым ротором ток статора больше номинального в 5 – 10 раз. Такие большие токи в статоре недопустимы по условиям динамических усилий в обмотках и нагрева обмоток. В асинхронных двигателях могут возникать переходные режимы с большими бросками тока не только при подключении двигателя к сети но и при его реверсе и торможении.
Итак, для чего нужно ограничивать пусковой ток в обмотках статора асинхронного электродвигателя с короткозамкнутым ротором?
Необходимость ограничения тока двигателей диктуется причинами электрического и механического характера. Причины электрического характера ограничения тока двигателей могут быть следующие:
- Уменьшение толчков тока в сети. В некоторых случаях для крупных двигателей требуется ограничить пусковой ток до допускаемого для питающей системы.
- Уменьшение электродинамических усилий в обмотках двигателя.
Уменьшение толчков тока в сети требуется обычно при пуске крупных асинхронных двигателей с короткозамкнутым ротором, если они получают питание от сравнительно маломощной питающей системы. Кроме того, для крупных двигателей заводы-изготовители машин не разрешают прямой пуск из-за чрезмерно больших электродинамических усилий в лобовых частях обмоток статора и ротора.
Кроме того, для крупных двигателей заводы-изготовители машин не разрешают прямой пуск из-за чрезмерно больших электродинамических усилий в лобовых частях обмоток статора и ротора.
Причины механического характера ограничения момента двигателей могут быть самыми разнообразными, например предотвращение поломки или быстрого изнашивания передач, соскальзывания ремней со шкивов, буксования колес подвижных тележек, больших ускорений или замедлений, недопустимых для оборудования или людей в различных средствах передвижения и т. д. Иногда требуется уменьшить пусковой момент двигателей, даже небольших, для того чтобы смягчить удары в передачах и обеспечить плавное ускорение.
Во всех случаях, где условия работы не требуют форсированных ускорений или замедлений, желательно рассчитывать режимы на минимальные броски тока, а следовательно, и момента, сохраняя этим передачи механизма и двигатель.
Устройство плавного пуска двигателя
Для ограничения тока применяются пусковые реакторы, резисторы и автотрансформаторы, а также современные электронные устройства – софт-стартеры (устройства плавного пуска двигателей).
Популярные товары
Шины медные плетеные
Шины изолированные гибкие и твердые
Шинодержатели
Изоляторы
Индикаторы наличия напряжения
Режимы работы асинхронного двигателя | Мир инженера
Приветствую тебя, дорогой и уважаемый читатель сайта “world-engineer.ru”. В одной из статей посвященной шаровым кранам с электроприводом я затронул вопрос о работе асинхронного двигателя и пообещал рассказать о нём в другой статье. Так что в этой статье вы узнаете принцип работы асинхронного двигателя.
Асинхронный двигатель предназначен для работы в продолжительном режиме работы (условное обозначение S1), при котором нагрузка, приложенная к валу и условия охлаждения двигателя практически постоянны в промежутке времени, достаточном для нагрева двигателя до установившейся температуры.
Правильный расчет усредненных величин КПД и коэффициента мощности особенно важен при выборе геометрических размеров, расчета потерь, нагрева и охлаждения, и выборе установленной мощности стандартных двигателей, применяемых для работы в кратковременных и повторно-кратковременных режимах.
Для асинхронных двигателей совокупность кратковременных, повторно-кратковременных и перемежающихся режимов работы подразделяется на 7 групп с условными обозначениями S2…S8.
Кратковременный режим (S2), режим при, котором двигатель не успевает достигнуть номинальной температуры нагрева частей за время работы при постоянной нагрузке, и успевает охладиться до температуры окружающей среды за время пауз.
Повторно-кратковременный режим (S3) работы асинхронного двигателя, характерен для условий работы, при котором продолжительность цикла (10 мин) намного больше времени пуска (т.е. переходной процесс при пуске не влияет на нагрев двигателя и не учитываются). Продолжительность рабочего времени в течении цикла, задается в процентах от времени цикла 5%, 25%, 40% и 60%.
В режимах (S4), в отличие от (S3), продолжительность цикла настолько мала, что процессы, происходящие во время пуска (увеличение потерь из за многократного превышения величин пусковых токов над номинальным), оказывают непосредственное влияние на нагрев машины. Длительность цикла, в этом случае, определяется продолжительностью рабочего времени в процентах от времени цикла и числом включений в час. Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Длительность цикла, в этом случае, определяется продолжительностью рабочего времени в процентах от времени цикла и числом включений в час. Поскольку характер переходного процесса во многом определяется динамической нагрузкой на валу, дополнительно задается допускаемый коэффициент инерции (отношение суммы моментов инерции ротора и приведенного к скорости вращения ротора, момента инерции приводного механизма к моменту инерции ротора), на который рассчитан двигатель из условий нормального нагрева.
Режимы работы асинхронного двигателя, при которых в конце каждого цикла предусмотрено электрическое торможение двигателя обозначаются (S5). Продолжительности включения в этом случае, рассчитывается с учетом времени электрического торможения.
Перемежающийся режим (S6) повторяет условия работы режима (S3) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения. Учет пусковых потерь на нагрев двигателя не производится.
Перемежающийся режим (S7) повторяет условия работы режима (S4) с учетом того что, в этом режиме допускается реверс с электрическим торможением или переход на другую скорость вращения.
Перемежающийся режим (S8) повторяет условия работы режима (S7) с учетом того что, в этом режиме допускается работа двигателя на нескольких разных скоростях вращения с разными величинами нагрузки на валу.
Особенности определения установленной мощности в кратковременном (S2) и повторно-кратковременном режиме эксплуатации (S3, S6)
В кратковременном (S2) и повторно-кратковременных режимах эксплуатации (S3, S6) электродвигатели могут работать с большей установленной мощностью, чем в длительном режиме работы (S1).
Возможное значение величины превышения мощности рекомендуется определять из условия сохранения перегрузочной способности асинхронного двигателя по максимальному моменту в пределах:
МКР / (МN*KP) >= 1,6
При больших числах включения и больших маховых массах определение мощности рекомендуется производить исходя из:
- относительной продолжительности включения;
- частоты включения;
- величины внешнего момента инерции;
- нагрузочной диаграммы привода;
- типа торможения.

Рекомендуемые коэффициенты превышения установленной мощности
| S2 | Коэффициент превышения | S3 | Коэффициент превышения | S6 | Коэффициент превышения |
| 10 мин | 1,4 | 25% | 1,33 | 25% | 1,45 |
| 30 мин | 1,15 | 40% | 1,18 | 40% | 1,35 |
| 60% | 1,08 | 60% | 1,15 |
В настоящее время отменен ГОСТ 183-74 Машины электрические вращающиеся. Общие технические условия. И теперь взамен этого ГОСТ, действует ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Согласно, актуальному ГОСТ режим работы асинхронного двигателя (электрических машин) выбирается из типовых режимов от S1 до S10:
S1 – продолжительный режим. Работа асинхронного двигателя с постоянной нагрузкой и продолжительностью;
S2 – кратковременный режим. Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
Работа асинхронного двигателя с постоянной нагрузкой в течении определенного времени. Вариант обозначения S2 60 мин;
S3 – повторно-кратковременный периодический режим. Работа асинхронного двигателя при последовательных одинаковых рабочих циклах. Вариант обозначения S3 25%;
S4 – повторно-кратковременный периодический режим с пусками;
S5 — повторно-кратковременный периодический режим с электрическим торможением;
S6 — непрерывный периодический режим с кратковременной нагрузкой;
S7 — непрерывный периодический режим с электрическим торможением;
S8 — непрерывный периодический режим с взаимозависимыми изменениями нагрузки и частоты вращения;
S9 — режим с непериодическими изменениями нагрузки и частоты вращения;
S10 — режиме дискретными постоянными нагрузками и частотами вращения.
Более подробную информацию можете изучить в ГОСТ Р 52776-2007 (МЭК 60034-1-2004) Машины электрические вращающиеся. Номинальные данные и характеристики.
Поделиться ссылкой:
Мгновенное прямое / обратное вращение с трехфазными асинхронными двигателями переменного тока
Различия между однофазными и трехфазными асинхронными двигателями переменного тока не ограничиваются входным источником питания. Есть несколько вещей, которые вам нужно знать при использовании трехфазных асинхронных двигателей переменного тока в мгновенном прямом / обратном режиме.
Что такое мгновенный прямой / обратный ход?
Мгновенная операция вперед / назад описывает двигатель, который постоянно вращается вперед и назад между двумя положениями. Примером применения может быть приспособление для тестирования соединителей, которое вставляет и втягивает соединитель для проверки его надежности. Это можно сделать с помощью двигателей переменного тока, бесщеточных двигателей, серводвигателей или шаговых двигателей. Все они могут изменить направление. Решающим фактором является то, насколько быстро и точно вы хотите, чтобы двигатель останавливался при получении команды на останов.
Примером применения может быть приспособление для тестирования соединителей, которое вставляет и втягивает соединитель для проверки его надежности. Это можно сделать с помощью двигателей переменного тока, бесщеточных двигателей, серводвигателей или шаговых двигателей. Все они могут изменить направление. Решающим фактором является то, насколько быстро и точно вы хотите, чтобы двигатель останавливался при получении команды на останов.
Кредит: Mathworks
В чем разница между однофазными и трехфазными асинхронными двигателями переменного тока?
1.Обмотки
Во-первых, другая конструкция обмотки. Первичная и вторичная обмотки у трехфазных двигателей более сбалансированы, чем у однофазных двигателей. В данном случае мы имеем в виду электрические характеристики обмотки. См. Пример в таблице ниже.
| Источник питания (В перем. Тока) | Двигатель | Первичная обмотка | Вторичная обмотка | |
| Фаза U (Ом) | Фаза V (Ом) | Фаза Вт (Ом) | ||
| | 4IK25A-CW | 157. 6 6 | 157,1 | н / д |
| Трехфазный 200/220/230 | 4IK25A-SW | 179,9 | 179,9 | 179,9 |
2. Производительность
Различные характеристики обмотки влияют на характеристики скорости и момента двигателя. На изображении ниже мы сравниваем кривые скорость-крутящий момент для однофазного и трехфазного двигателей.
Благодаря большему крутящему моменту в области низких скоростей трехфазные двигатели обеспечивают больший пусковой крутящий момент и лучше подходят для мгновенного прямого / обратного хода.Когда однофазный двигатель останавливается и реверсирует, более низкий крутящий момент может привести к замедлению разгона двигателя до его номинальной скорости. Когда трехфазный двигатель останавливается и реверсирует, более высокий крутящий момент позволяет ему быстрее разгоняться до номинальной скорости.
3. Пусковой момент
Пусковой момент
FYI не останавливаются немедленно. Если они не используются с каким-либо типом фрикционного, электромагнитного, тормозного механизма сцепления или электронного тормозного блока, они будут останавливаться по инерции. Расстояние выбега или выбег зависит от трения и инерционной нагрузки, но может достигать 30 оборотов (на валу двигателя; кратно передаточному отношению).Этот перебег не очень хорошо сочетается с «мгновенной» частью мгновенного движения вперед / назад, так как двигателю теперь нужно время, чтобы разогнаться до номинальной скорости каждый раз, когда он запускается. Если вы измените направление слишком быстро, не дожидаясь, пока двигатель не остановится, он может продолжать вращаться в том же направлении.
Перебег одинаков для однофазных и трехфазных асинхронных двигателей переменного тока после отключения питания, хотя более высокий пусковой момент у трехфазных двигателей делает их более идеальными для мгновенных операций вперед / назад.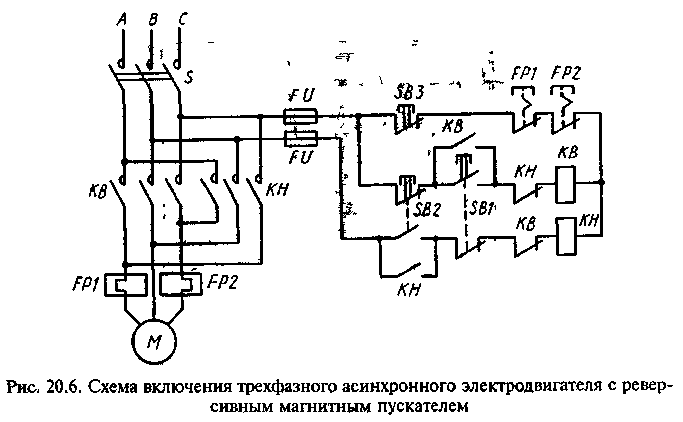
| СОВЕТ № 1: Остановите трехфазный двигатель перед изменением направления |
Если вы хотите, чтобы двигатель продолжал работать, вот две причины, по которым вам следует сначала остановить двигатель, прежде чем менять его направление. Лучший способ — дать двигателю полностью остановиться перед переключением направления. В противном случае рекомендуется тестирование.
Повреждение шестерни В некоторых случаях шестерни мотор-редуктора могут быть повреждены в момент реверсирования.Если направление двигателя переключается слишком быстро, нагрузка может продолжать вращаться в том же направлении, но на самом деле двигатель пытается вращаться в противоположном направлении. Поскольку крутящий момент работает в обоих направлениях, шестерни могут быть повреждены. Риск короткого замыкания питания Внутренняя разводка обмоток однофазного двигателя и трехфазного двигателя отличается.Поэтому метод внешней проводки и тип переключателя различаются. На приведенной ниже схеме показаны схемы подключения однофазного и трехфазного двигателей. Различия в подключении: Первое, что вы, вероятно, заметили, — это конденсатор, показанный на схеме подключения однофазного двигателя. Конденсатор превращает однофазный источник питания в многофазный. Многофазный источник питания необходим для создания вращающегося магнитного поля внутри двигателя. Второе, что вы, вероятно, заметили, — это количество проводов, которые нам нужно переключить, чтобы реверсировать трехфазный двигатель (MC). С однофазным двигателем эту работу может выполнять однополюсный двухпозиционный переключатель. |
 Сведение к минимуму сил удара для шестерен внутри редуктора двигателя может продлить срок его службы. Более высокий пусковой момент трехфазных двигателей усугубляет проблему.
Сведение к минимуму сил удара для шестерен внутри редуктора двигателя может продлить срок его службы. Более высокий пусковой момент трехфазных двигателей усугубляет проблему. Однако для трехфазного двигателя требуется электромагнитный переключатель без потерь, который предлагает структуру блокировки. Этот тип переключателя не позволяет одновременно включать два контакта. Если на любой из двух проводов подается питание одновременно, это может вызвать короткое замыкание в цепи питания, а затем автоматический выключатель может остановить двигатель.С однофазными двигателями риска нет, так как переключается только один полюс.
Однако для трехфазного двигателя требуется электромагнитный переключатель без потерь, который предлагает структуру блокировки. Этот тип переключателя не позволяет одновременно включать два контакта. Если на любой из двух проводов подается питание одновременно, это может вызвать короткое замыкание в цепи питания, а затем автоматический выключатель может остановить двигатель.С однофазными двигателями риска нет, так как переключается только один полюс.| СОВЕТ № 2: Используйте инвертор |
Другой способ управления направлением трехфазных двигателей — использование инвертора или частотно-регулируемого привода. ЧРП разработан для управления направлением и скоростью трехфазных двигателей (и многим другим), поэтому мгновенные операции вперед / назад могут быть выполнены намного проще.В дополнение к популярной серии стандартных двигателей переменного тока World K, новая серия трехфазных двигателей переменного тока с высоким крутящим моментом KIIS компании Oriental Motor была разработана для работы с частотно-регулируемыми приводами. |
Предлагаются кривые «скорость-крутящий момент», отображающие ожидаемые характеристики двигателя и комбинации частотно-регулируемого привода. Больше будет добавляться по мере их появления.
Не стесняйтесь нажимать на данные кривой выше, чтобы узнать больше об этих двигателях.
Последние мысли
Помните , мгновенная работа вперед / назад не ограничивается только трехфазными двигателями. Любой двигатель может работать в прямом / обратном направлении, решающим фактором является то, насколько «мгновенно» и насколько «точным» вы хотите добиться этого. Всегда есть компромиссы.
Различные двигатели имеют разные способы выполнения операций вперед / назад. Поэтому для продуктов предлагаются разные характеристики перебега и частоты торможения.Например, в однофазном реверсивном двигателе используется фрикционный тормоз, чтобы резко снизить его выбег для мгновенных операций вперед / назад. В то время как перебег на валу двигателя снижен до 2 оборотов, тепло, выделяемое фрикционным тормозом, ограничивает рабочий цикл до 30 минут за раз. Этот двигатель идеально подходит для машин, которые допускают перебег на 2 оборота для точности остановки и работают только 30 минут за раз. Для приложений, требующих мгновенных остановов, но не определенного значения точности останова, может быть достаточно системы бесщеточного двигателя с системой динамического торможения.Шаговые двигатели или серводвигатели на самом деле предлагают лучшую точность остановки, пусковой крутящий момент и точность остановки для мгновенных операций вперед / назад, но для управления этими двигателями требуется больше, чем для реверсивного двигателя переменного тока.
В то время как перебег на валу двигателя снижен до 2 оборотов, тепло, выделяемое фрикционным тормозом, ограничивает рабочий цикл до 30 минут за раз. Этот двигатель идеально подходит для машин, которые допускают перебег на 2 оборота для точности остановки и работают только 30 минут за раз. Для приложений, требующих мгновенных остановов, но не определенного значения точности останова, может быть достаточно системы бесщеточного двигателя с системой динамического торможения.Шаговые двигатели или серводвигатели на самом деле предлагают лучшую точность остановки, пусковой крутящий момент и точность остановки для мгновенных операций вперед / назад, но для управления этими двигателями требуется больше, чем для реверсивного двигателя переменного тока.
Вот некоторые сравнительные данные между всеми двигателями, которые могут выполнять операции вперед / назад. Помните, что эти значения перебега относятся к двигателю. Если вы добавляете редуктор, разделите перебег на передаточное число. Это только справочные значения.
Это только справочные значения.
Oriental Motor предлагает полную линейку асинхронных двигателей переменного тока от 1 Вт (1/750 л.с.) до 2237 Вт (3 л.с.).В дополнение к асинхронным двигателям также доступны реверсивные двигатели, двигатели с электромагнитным тормозом, двигатели сцепления / тормоза и промывочные двигатели. Для приложений с высоким крутящим моментом могут быть добавлены различные типы редукторов. Группы серий продуктов различаются в зависимости от типа (-ов) двигателя и функций. Например, серия World K — это наша стандартная серия двигателей переменного тока, в которую входят многие типы двигателей, от асинхронных до электромагнитных тормозов. Серия KIIS — это трехфазная часть серии KII, которая сохраняет характеристики высокого крутящего момента серии KII, а также новые функции трехфазного управления скоростью.
При таком широком ассортименте продукции рекомендуется проконсультироваться по выбору двигателя с нашими инженерами службы технической поддержки, чтобы сузить выбор продуктов.
Вот разбивка всей нашей линейки трехфазных двигателей переменного тока.
- World K Series (1 ~ 150 Вт): однофазный и трехфазный; стандартный тип
- K2S Series (30 ~ 200 Вт): трехфазный; оптимизирован для VFD
- Brother Mid G3 Series (1/2 ~ 3 л.с.): трехфазный; высокая мощность
На нашем веб-сайте мы разбиваем их на двигатели переменного тока « с постоянной скоростью » и « с регулировкой скорости ».В то время как двигатели переменного тока с постоянной скоростью включают как однофазные, так и трехфазные типы, трехфазные двигатели переменного тока для частотно-регулируемых приводов ориентированы только на трехфазные двигатели, предназначенные для управления скоростью.
Пожалуйста, подпишитесь на этот блог в правом верхнем углу страницы.
Цепи прямого / обратного управления — базовое управление двигателем
Если трехфазный двигатель должен приводиться в движение только в одном направлении, и при его первоначальном включении оказывается, что он вращается противоположно желаемому, все, что необходимо, — это поменять местами любые два из трех линейных проводов, питающих двигатель. .Это можно сделать на пускателе двигателя или на самом двигателе.
.Это можно сделать на пускателе двигателя или на самом двигателе.
После того, как две линии были переключены, направление магнитных полей, созданных в двигателе, теперь заставит вал вращаться в противоположном направлении. Это известно как реверсирование чередования фаз .
Если двигатель должен приводиться в движение в двух направлениях, то для него потребуется пускатель прямого / обратного хода, который имеет два трехполюсных контактора с номинальной мощностью в лошадиных силах, а не один, как в обычном пускателе.Каждый из двух стартеров двигателя приводит в действие двигатель с разным чередованием фаз.
Когда контактор прямого хода находится под напряжением, силовые контакты соединяют линию L1 с T1, линию L2 с T2 и линию L3 с T3 на двигателе. Когда обратный контактор находится под напряжением, силовые контакты соединяют линию L1 с T3, линию L2 с T2 и линию L3 с T1 на двигателе.
Силовая цепь прямого / обратного хода Поскольку два пускателя двигателя управляют только одним двигателем, необходимо использовать только один комплект нагревателей реле перегрузки. Обратные пути для обеих катушек стартера соединяются в серии с нормально замкнутыми контактами реле перегрузки , так что при возникновении перегрузки в любом направлении катушки стартера будут обесточены, и двигатель перейдет в нормальное состояние. останавливаться.
Обратные пути для обеих катушек стартера соединяются в серии с нормально замкнутыми контактами реле перегрузки , так что при возникновении перегрузки в любом направлении катушки стартера будут обесточены, и двигатель перейдет в нормальное состояние. останавливаться.
Обратите внимание, что два контактора должны быть электрически и механически заблокированы , чтобы на них нельзя было подавать питание одновременно. Если обе катушки стартера будут запитаны одновременно, произойдет короткое замыкание с потенциально опасными последствиями.
Пускатели прямого / обратного ходапоставляются с двумя наборами нормально разомкнутых вспомогательных контактов , которые действуют как удерживающие контакты в каждом направлении. Они также будут поставляться с двумя наборами нормально замкнутых вспомогательных контактов, которые действуют как электрические блокировки.
Пускатели прямого / обратного хода никогда не должны замыкать свои силовые контакты одновременно. Лучший способ обеспечить это — использовать электрические блокировки, которые предотвращают подачу питания на одну катушку, если задействована другая. Неисправность электрической блокировки может привести к одновременному включению обеих катушек.
Лучший способ обеспечить это — использовать электрические блокировки, которые предотвращают подачу питания на одну катушку, если задействована другая. Неисправность электрической блокировки может привести к одновременному включению обеих катушек.
Если обе находятся под напряжением, требуется какая-то механическая блокировка, чтобы предотвратить втягивание обоих якорей . На схематических диаграммах изображенная пунктирной линией между двумя катушками, механическая блокировка представляет собой физический барьер, который вставляется в путь якоря одной катушки за счет движения соседней катушки. Это означает, что даже если обе катушки находятся под напряжением, только один якорь сможет втягиваться полностью. Катушка, которая не втягивается, будет издавать ужасный дребезжащий звук, пытаясь замкнуть магнитную цепь.
На механические блокировки следует полагаться как на последнее средство защиты.
Электрическая блокировка достигается путем установки нормально замкнутого контакта катушки одного направления последовательно с катушкой противоположного направления, и наоборот. Это гарантирует, что при включении прямой катушки нажатие кнопки заднего хода не активирует обратную катушку. Такая же ситуация имеет место, когда обратная катушка находится под напряжением. В обеих ситуациях необходимо будет нажать кнопку останова, чтобы обесточить работающую катушку и вернуть все ее вспомогательные контакты в исходное состояние.Тогда может быть задействована катушка противоположного направления.
Это гарантирует, что при включении прямой катушки нажатие кнопки заднего хода не активирует обратную катушку. Такая же ситуация имеет место, когда обратная катушка находится под напряжением. В обеих ситуациях необходимо будет нажать кнопку останова, чтобы обесточить работающую катушку и вернуть все ее вспомогательные контакты в исходное состояние.Тогда может быть задействована катушка противоположного направления.
При разработке схемы управления для цепей прямого / обратного хода мы начинаем со стандартной трехпроводной схемы , добавляем вторую нормально разомкнутую кнопку и добавляем ответвление удерживающего контакта для второй катушки. Одной кнопки останова достаточно, чтобы отключить двигатель в обоих направлениях.
Две катушки механически блокируются, а нормально замкнутые контакты мгновенного действия обеспечивают электрическую блокировку.
Если нажать кнопку прямого направления, пока обратная катушка не задействована, ток найдет путь через нормально замкнутый обратный контакт и возбудит прямую катушку, заставляя все контактов , связанных с этой катушкой, изменить свое состояние. Удерживающий контакт 2-3 замкнется, и нормально замкнутая электрическая блокировка разомкнется. Если нажать кнопку реверса, когда задействована прямая катушка, ток не сможет пройти через прямой нормально замкнутый контакт, и ничего не произойдет.
Удерживающий контакт 2-3 замкнется, и нормально замкнутая электрическая блокировка разомкнется. Если нажать кнопку реверса, когда задействована прямая катушка, ток не сможет пройти через прямой нормально замкнутый контакт, и ничего не произойдет.
Для того, чтобы двигатель вращался в обратном направлении, передняя катушка должна быть обесточена. Для этого необходимо нажать кнопку останова, тогда кнопка реверса сможет активировать обратную катушку.
Независимо от направления вращения двигателя, эта схема будет работать как стандартная трехпроводная схема, обеспечивающая защиту от низкого напряжения (LVP) до тех пор, пока не будет нажата кнопка останова или не произойдет перегрузка .
Блокировка кнопок прямого / обратного ходаБлокировка кнопок требует использования четырехконтактных кнопок мгновенного действия, каждая из которых имеет набор нормально разомкнутых и нормально замкнутых контактов.
Чтобы обеспечить блокировку кнопок, просто соедините нормально замкнутые контакты одной кнопки последовательно с нормально разомкнутыми контактами другой кнопки, а удерживающие контакты будут соединены параллельно с нормально разомкнутыми контактами соответствующей кнопки.
Эта схема все еще требует установки электрических блокировок.
Для блокировки кнопок не требуется, чтобы катушки двигателя были отключены перед изменением направления, потому что нормально замкнутые передние контакты включены последовательно с нормально разомкнутыми обратными контактами, и наоборот.Нажатие одной кнопки одновременно отключает одну катушку и запускает другую. Это внезапное реверсирование (, заглушка ) может сильно повлиять на двигатель, но если требуется быстрое реверсирование мотора, эта схема может быть решением.
Электродвигатель— Энциклопедия Нового Света
Вращающееся магнитное поле как сумма магнитных векторов от трех фазных катушек Электродвигатель преобразует электрическую энергию в кинетическую. Обратная задача — преобразование кинетической энергии в электрическую — выполняется генератором или динамо-машиной.Во многих случаях два устройства различаются только своим применением и незначительными деталями конструкции, а некоторые приложения используют одно устройство для выполнения обеих ролей. Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Например, тяговые двигатели, используемые на локомотивах, часто выполняют обе задачи, если локомотив оборудован динамическими тормозами.
Большинство электродвигателей работают за счет электромагнетизма, но также существуют двигатели, основанные на других электромеханических явлениях, таких как электростатические силы и пьезоэлектрический эффект. Фундаментальный принцип, на котором основаны электромагнитные двигатели, заключается в том, что на любой токоведущий провод, находящийся внутри магнитного поля, действует механическая сила.Сила описывается законом силы Лоренца и перпендикулярна как проводу, так и магнитному полю.
Большинство магнитных двигателей являются вращающимися, но существуют и линейные двигатели. В роторном двигателе вращающаяся часть (обычно внутри) называется ротором, а неподвижная часть — статором. Ротор вращается, потому что провода и магнитное поле расположены так, что вокруг оси ротора создается крутящий момент. Двигатель содержит электромагниты, намотанные на раму. Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно.Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Хотя эту раму часто называют арматурой, этот термин часто используют ошибочно.Правильно, якорь — это та часть двигателя, на которую подается входное напряжение. В зависимости от конструкции машины якорь может служить как ротор, так и статор.
Двигатели постоянного тока
Электродвигатели различных типоразмеров. Ротор от маленького мотора постоянного тока 3В. Этот двигатель имеет 3 катушки, и коммутатор можно увидеть на ближнем конце. Один из первых электромагнитных роторных двигателей был изобретен Майклом Фарадеем в 1821 году и состоял из свободно висящего провода, погруженного в бассейн с ртутью.Постоянный магнит был помещен в середину ртутной ванны.
Когда через провод пропускался ток, он вращался вокруг магнита, показывая, что ток порождал круговое магнитное поле вокруг провода. Этот двигатель часто демонстрируется на школьных уроках физики, но иногда вместо токсичной ртути используется рассол (соленая вода). Это простейшая форма класса электродвигателей, называемых униполярными двигателями. Более поздняя доработка — Колесо Барлоу.
Более поздняя доработка — Колесо Барлоу.
В другой ранней конструкции электродвигателя использовался поршень возвратно-поступательного действия внутри переключаемого соленоида; концептуально его можно рассматривать как электромагнитную версию двухтактного двигателя внутреннего сгорания.Томас Давенпорт построил небольшой электродвигатель постоянного тока в 1834 году, используя его для управления игрушечным поездом по круговой дороге. Он получил на нее патент в 1837 году.
Современный двигатель постоянного тока был изобретен случайно в 1873 году, когда Зеноб Грамм соединил вращающуюся динамо-машину со вторым аналогичным устройством, приведя его в действие как двигатель. Машина Грамма была первым промышленно полезным электродвигателем; более ранние изобретения использовались в качестве игрушек или лабораторных диковинок.
Классический двигатель постоянного тока имеет вращающийся якорь в виде электромагнита.Поворотный переключатель, называемый коммутатором, меняет направление электрического тока дважды за цикл, чтобы он протекал через якорь, так что полюса электромагнита толкаются и притягиваются к постоянным магнитам на внешней стороне двигателя. Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В этот момент переключения полярности импульс поддерживает классический двигатель в нужном направлении.(См. Диаграммы ниже.)
Когда полюса электромагнита якоря проходят через полюса постоянных магнитов, коммутатор меняет полярность электромагнита якоря. В этот момент переключения полярности импульс поддерживает классический двигатель в нужном направлении.(См. Диаграммы ниже.)
- Вращение двигателя постоянного тока
Простой электродвигатель постоянного тока. Когда катушка запитана, вокруг якоря создается магнитное поле. Левая сторона якоря отодвигается от левого магнита и тянется вправо, вызывая вращение.
Якорь продолжает вращаться.
Когда якорь выравнивается по горизонтали, коммутатор меняет направление тока через катушку на противоположное, изменяя направление магнитного поля.Затем процесс повторяется.
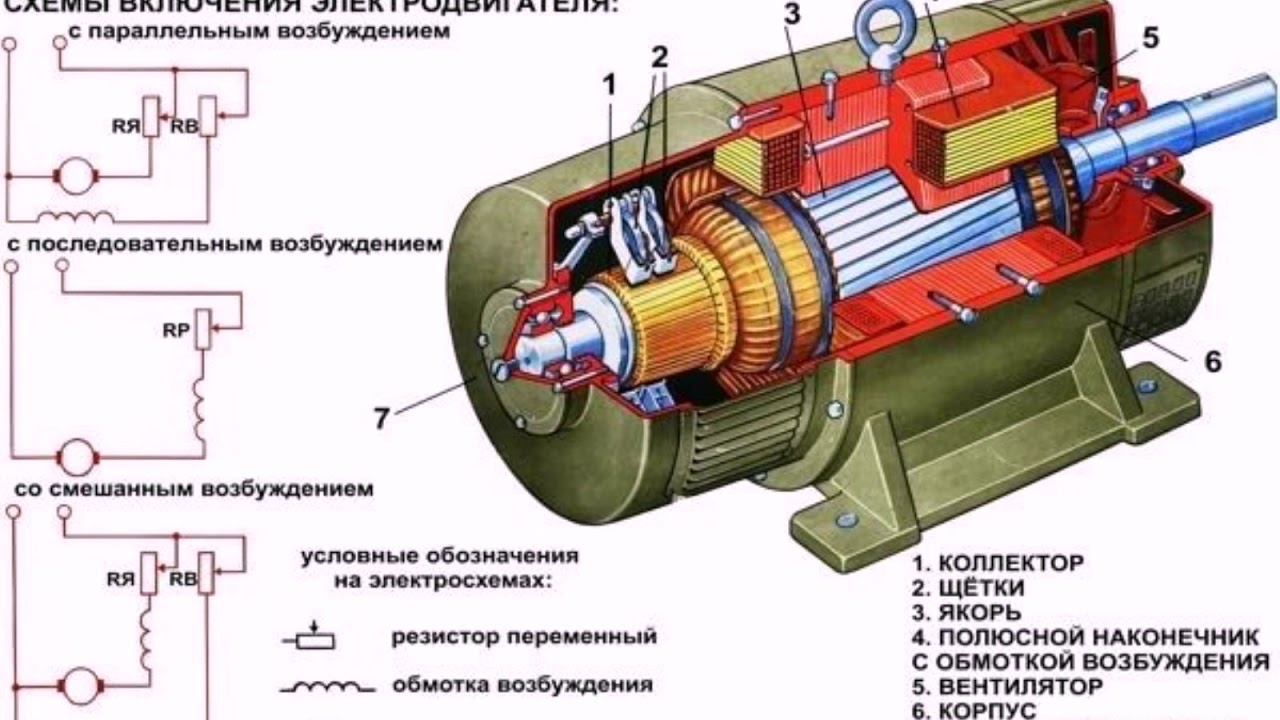
Электродвигатель постоянного тока с возбуждением от возбуждения
Постоянные магниты на внешней стороне (статоре) двигателя постоянного тока могут быть заменены электромагнитами. Изменяя ток возбуждения, можно изменять соотношение скорость / крутящий момент двигателя. Обычно обмотка возбуждения размещается последовательно (последовательная обмотка), с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (шунтирующая обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом, или имеют обмотку частично параллельно, а частично последовательно (составная обмотка) для баланса, который обеспечивает стабильную скорость в диапазоне нагрузок. Раздельное возбуждение также является обычным, с фиксированным напряжением поля, скорость регулируется изменением напряжения якоря. Дальнейшее снижение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Обычно обмотка возбуждения размещается последовательно (последовательная обмотка), с обмоткой якоря для получения низкоскоростного двигателя с высоким крутящим моментом, параллельно (шунтирующая обмотка) с якорем для получения высокоскоростного двигателя с низким крутящим моментом, или имеют обмотку частично параллельно, а частично последовательно (составная обмотка) для баланса, который обеспечивает стабильную скорость в диапазоне нагрузок. Раздельное возбуждение также является обычным, с фиксированным напряжением поля, скорость регулируется изменением напряжения якоря. Дальнейшее снижение тока возбуждения возможно для получения еще более высокой скорости, но, соответственно, более низкого крутящего момента, что называется режимом «слабого поля».
Теория
Если вал двигателя постоянного тока вращается под действием внешней силы, двигатель будет действовать как генератор и создавать электродвижущую силу (ЭДС). Это напряжение также генерируется при нормальной работе двигателя. Вращение двигателя создает напряжение, известное как противо-ЭДС (CEMF) или противо-ЭДС, поскольку оно противодействует приложенному напряжению на двигателе. Следовательно, падение напряжения на двигателе состоит из падения напряжения из-за этой CEMF и паразитного падения напряжения, возникающего из-за внутреннего сопротивления обмоток якоря.
Вращение двигателя создает напряжение, известное как противо-ЭДС (CEMF) или противо-ЭДС, поскольку оно противодействует приложенному напряжению на двигателе. Следовательно, падение напряжения на двигателе состоит из падения напряжения из-за этой CEMF и паразитного падения напряжения, возникающего из-за внутреннего сопротивления обмоток якоря.
Поскольку CEMF пропорциональна скорости двигателя, при первом запуске или полном останове электродвигателя CEMF отсутствует. Следовательно, ток через якорь намного выше.Этот высокий ток создаст сильное магнитное поле, которое запустит вращение двигателя. По мере вращения двигателя CEMF увеличивается до тех пор, пока не станет равным приложенному напряжению за вычетом паразитного падения напряжения. В этот момент через двигатель будет протекать меньший ток.
Регулировка скорости
Обычно скорость вращения двигателя постоянного тока пропорциональна приложенному к нему напряжению, а крутящий момент пропорционален току. Регулировка скорости может быть достигнута с помощью регулируемых выводов аккумуляторной батареи, переменного напряжения питания, резисторов или электронного управления.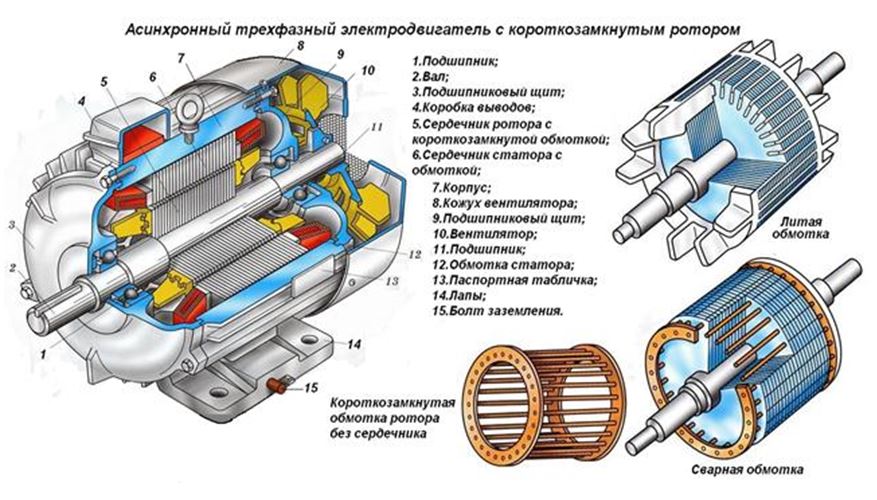 Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе. Обычно это делается с помощью специального набора контакторов (контакторов направления).
Направление двигателя постоянного тока с обмоткой возбуждения можно изменить, поменяв местами подключения возбуждения или якоря, но не то и другое вместе. Обычно это делается с помощью специального набора контакторов (контакторов направления).
Эффективное напряжение можно изменять, вставляя последовательный резистор или используя переключающее устройство с электронным управлением, состоящее из тиристоров, транзисторов или, ранее, ртутных дуговых выпрямителей. В цепи, известной как прерыватель, среднее напряжение, приложенное к двигателю, изменяется путем очень быстрого переключения напряжения питания.Поскольку отношение «включено» к «выключено» изменяется для изменения среднего приложенного напряжения, скорость двигателя изменяется. Процент времени включения, умноженный на напряжение питания, дает среднее напряжение, приложенное к двигателю.
Поскольку двигатель постоянного тока с последовательной обмоткой развивает максимальный крутящий момент на низкой скорости, он часто используется в тяговых устройствах, таких как электровозы и трамваи.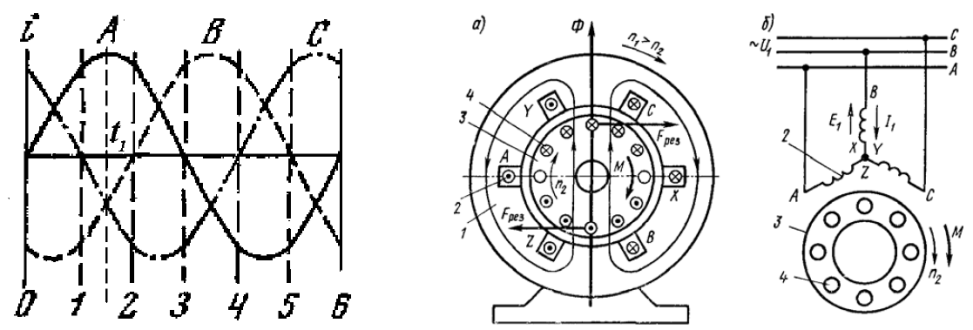 Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи).По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе), пока он не разрушит себя. Это также может быть проблемой для железнодорожных двигателей в случае потери сцепления, поскольку, если быстро не взять под контроль двигатели, они могут развивать скорость намного выше, чем при нормальных обстоятельствах. Это может вызвать проблемы не только для самих двигателей и шестерен, но и из-за разницы скоростей между рельсами и колесами, это также может вызвать серьезные повреждения рельсов и ступеней колес, поскольку они быстро нагреваются и охлаждаются.Ослабление поля используется в некоторых электронных элементах управления для увеличения максимальной скорости электромобиля. В простейшей форме используется контактор и резистор ослабления поля, электронное управление контролирует ток двигателя и подключает резистор ослабления поля в цепь, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель работает на полной расчетной скорости).
Другое применение — стартеры для бензиновых и небольших дизельных двигателей. Серийные двигатели никогда не должны использоваться в приложениях, где привод может выйти из строя (например, ременные передачи).По мере ускорения двигателя ток якоря (и, следовательно, возбуждения) уменьшается. Уменьшение поля заставляет двигатель ускоряться (см. «Слабое поле» в последнем разделе), пока он не разрушит себя. Это также может быть проблемой для железнодорожных двигателей в случае потери сцепления, поскольку, если быстро не взять под контроль двигатели, они могут развивать скорость намного выше, чем при нормальных обстоятельствах. Это может вызвать проблемы не только для самих двигателей и шестерен, но и из-за разницы скоростей между рельсами и колесами, это также может вызвать серьезные повреждения рельсов и ступеней колес, поскольку они быстро нагреваются и охлаждаются.Ослабление поля используется в некоторых электронных элементах управления для увеличения максимальной скорости электромобиля. В простейшей форме используется контактор и резистор ослабления поля, электронное управление контролирует ток двигателя и подключает резистор ослабления поля в цепь, когда ток двигателя уменьшается ниже заданного значения (это будет, когда двигатель работает на полной расчетной скорости). Как только резистор включен в цепь, двигатель увеличит скорость выше своей нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, система управления отключает резистор и становится доступным крутящий момент на низкой скорости.
Как только резистор включен в цепь, двигатель увеличит скорость выше своей нормальной скорости при номинальном напряжении. Когда ток двигателя увеличивается, система управления отключает резистор и становится доступным крутящий момент на низкой скорости.
Одним из интересных методов управления скоростью двигателя постоянного тока является управление Уорда-Леонарда. Это метод управления двигателем постоянного тока (обычно с шунтирующей или составной обмоткой) и был разработан как метод обеспечения двигателя с регулируемой скоростью от источника переменного тока (переменного тока), хотя он не лишен своих преимуществ в схемах постоянного тока. Источник переменного тока используется для привода двигателя переменного тока, обычно асинхронного двигателя, который приводит в действие генератор постоянного тока или динамо-машину. Выход постоянного тока из якоря напрямую подключен к якорю двигателя постоянного тока (обычно идентичной конструкции).Шунтирующие обмотки возбуждения обеих машин постоянного тока возбуждаются через переменный резистор от якоря генератора. Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этот метод управления был методом de facto с момента его разработки до момента его замены на твердотельные тиристорные системы. Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок большой шахты и даже промышленного технологического оборудования и электрических кранов.Его основным недостатком было то, что для реализации схемы требовалось три машины (пять в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка мотор-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости. Есть множество устаревших установок Ward-Leonard, которые все еще используются.
Этот переменный резистор обеспечивает исключительно хорошее управление скоростью от состояния покоя до полной скорости и постоянный крутящий момент. Этот метод управления был методом de facto с момента его разработки до момента его замены на твердотельные тиристорные системы. Она нашла применение практически в любой среде, где требовалось хорошее управление скоростью, от пассажирских лифтов до обмотки головок большой шахты и даже промышленного технологического оборудования и электрических кранов.Его основным недостатком было то, что для реализации схемы требовалось три машины (пять в очень больших установках, поскольку машины постоянного тока часто дублировались и управлялись тандемным переменным резистором). Во многих случаях установка мотор-генератор часто оставалась постоянно работающей, чтобы избежать задержек, которые в противном случае были бы вызваны ее запуском по мере необходимости. Есть множество устаревших установок Ward-Leonard, которые все еще используются.
Универсальные двигатели
Вариантом обмотки Двигатель постоянного тока является универсальный двигатель . Название происходит от того факта, что он может использовать переменный ток (переменный ток) или постоянный ток, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении. . На практике двигатель должен быть специально разработан для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель DC .При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя.
Название происходит от того факта, что он может использовать переменный ток (переменный ток) или постоянный ток, хотя на практике они почти всегда используются с источниками переменного тока. Принцип заключается в том, что в двигателе постоянного тока с обмоткой поля ток как в поле, так и в якоре (и, следовательно, результирующие магнитные поля) будут чередоваться (обратная полярность) в одно и то же время, и, следовательно, генерируемая механическая сила всегда в одном и том же направлении. . На практике двигатель должен быть специально разработан для работы с переменным током (необходимо учитывать импеданс, а также пульсирующую силу), и получаемый в результате двигатель обычно менее эффективен, чем эквивалентный чистый двигатель DC .При работе на нормальных частотах линии электропередачи максимальная мощность универсальных двигателей ограничена, а двигатели мощностью более одного киловатта встречаются редко. Но универсальные двигатели также составляют основу традиционного железнодорожного тягового двигателя. В этом приложении для поддержания высокого электрического КПД они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2 / 3 Гц. Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
В этом приложении для поддержания высокого электрического КПД они работали от очень низкочастотных источников переменного тока с частотой 25 Гц и 16 2 / 3 Гц. Поскольку это универсальные двигатели, локомотивы, использующие эту конструкцию, также обычно могли работать от третьего рельса с питанием от постоянного тока.
Преимущество универсального двигателя заключается в том, что источники питания переменного тока могут использоваться на двигателях, которые имеют типичные характеристики двигателей постоянного тока, в частности, высокий пусковой момент и очень компактную конструкцию, если используются высокие скорости вращения. Отрицательный аспект — проблемы с обслуживанием и коротким сроком службы, вызванные коммутатором. В результате такие двигатели обычно используются в устройствах переменного тока, таких как миксеры для пищевых продуктов и электроинструменты, которые используются только с перерывами. Непрерывное управление скоростью универсального двигателя, работающего от переменного тока, очень легко достигается с помощью тиристорной схемы, в то время как ступенчатое управление скоростью может быть выполнено с помощью нескольких отводов на катушке возбуждения. Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с 0,707 среднеквадратичного напряжения линии питания переменного тока).
Бытовые блендеры, рекламирующие много скоростей, часто сочетают в себе катушку возбуждения с несколькими ответвлениями и диод, который можно вставить последовательно с двигателем (в результате чего двигатель работает на полуволновом постоянном токе с 0,707 среднеквадратичного напряжения линии питания переменного тока).
В отличие от двигателей переменного тока, универсальные двигатели могут легко превышать один оборот за цикл сетевого тока. Это делает их полезными для таких приборов, как блендеры, пылесосы и фены, где требуется высокая скорость работы. Моторы многих пылесосов и триммеров для сорняков превышают 10 000 об / мин, Dremel и другие подобные миниатюрные шлифовальные машины часто превышают 30 000 об / мин.Теоретически универсальный двигатель, которому разрешено работать без механической нагрузки, будет превышать скорость, что может привести к его повреждению. В реальной жизни, однако, различное трение подшипников, «парусность» якоря и нагрузка любого встроенного охлаждающего вентилятора — все это предотвращает превышение скорости.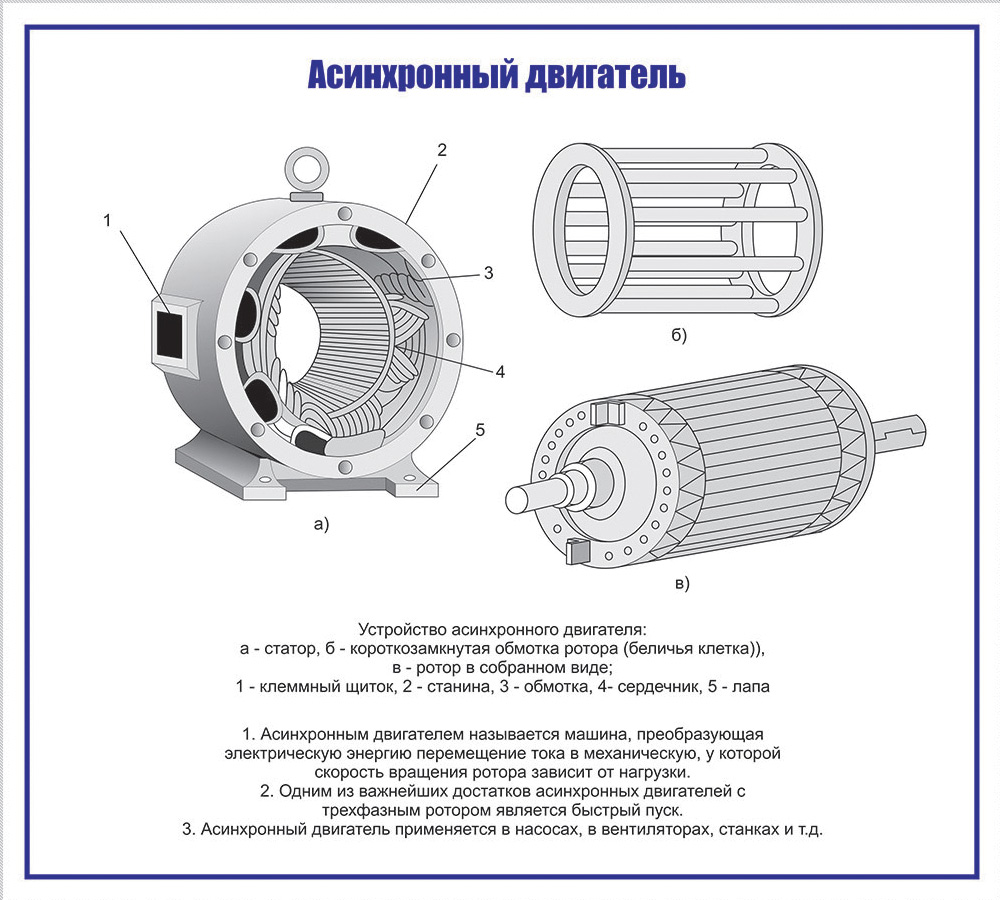
Из-за очень низкой стоимости полупроводниковых выпрямителей в некоторых приложениях, где раньше использовался универсальный двигатель, теперь используется чистый двигатель постоянного тока, обычно с полем постоянного магнита. Это особенно верно, если полупроводниковая схема также используется для регулирования скорости.
Преимущества универсального двигателя и распределения переменного тока сделали установку низкочастотной системы распределения тягового тока экономичной для некоторых железнодорожных установок. На достаточно низких частотах характеристики двигателя примерно такие же, как если бы двигатель работал от постоянного тока.
Двигатели переменного тока (переменного тока)
В 1882 году Никола Тесла определил принцип вращающегося магнитного поля и впервые применил вращающееся силовое поле для работы машин.Он использовал этот принцип для разработки уникального двухфазного асинхронного двигателя в 1883 году. В 1885 году Галилео Феррарис независимо исследовал эту концепцию. В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
В 1888 году Феррарис опубликовал свое исследование в докладе Королевской академии наук в Турине.
Введение двигателя Теслы с 1888 г. и далее инициировало так называемую Вторую промышленную революцию, сделав возможным эффективное производство и распределение электроэнергии на большие расстояния с использованием системы передачи переменного тока, также изобретенной Тесла (1888 г.).До изобретения вращающегося магнитного поля двигатели работали, непрерывно пропуская проводник через постоянное магнитное поле (как в униполярных двигателях).
Тесла предположил, что коммутаторы из машины могут быть удалены, и устройство может работать во вращающемся силовом поле. Его учитель профессор Пошель заявил, что это было бы похоже на создание вечного двигателя. [1] Tesla позже получит патент США 0416194 (PDF), Electric Motor (декабрь 1889 г.), который напоминает двигатель, изображенный на многих фотографиях Tesla.Этим классическим электромагнитным двигателем переменного тока был асинхронный двигатель .
| Энергия статора | Энергия ротора | Всего поставлено энергии | Мощность развита |
|---|---|---|---|
| 10 | 90 | 100 | 900 |
| 50 | 50 | 100 | 2500 |
В асинхронном двигателе , поле и якорь в идеале были равной напряженности поля, а сердечники поля и якоря были одинакового размера.Полная энергия, потребляемая для работы устройства, равна сумме энергии, затраченной на якорь и катушку возбуждения. [2] Мощность, развиваемая при работе устройства, равна произведению энергии, затраченной в катушках якоря и возбуждения. [3]
Михаил Осипович Доливо-Добровольский позже изобрел трехфазный «клеть-ротор» в 1890 году. Успешная коммерческая многофазная система генерации и передачи на большие расстояния была спроектирована Алмерианом Декером в Mill Creek No.1 [4] в Редлендс, Калифорния. [5]
Детали и типы
Типичный двигатель переменного тока состоит из двух частей:
- Внешний неподвижный статор с катушками, на которые подается переменный ток для создания вращающегося магнитного поля, и;
- Внутренний ротор, прикрепленный к выходному валу, которому крутящий момент создается вращающимся полем.
В зависимости от типа используемого ротора существует два основных типа двигателей переменного тока:
- Синхронный двигатель, который вращается точно с частотой питающей сети или долей частоты питающей сети, и;
- Асинхронный двигатель, который вращается немного медленнее и обычно (хотя и не всегда) имеет форму двигателя с короткозамкнутым ротором.
Трехфазные асинхронные двигатели переменного тока
Трехфазные асинхронные двигатели переменного тока мощностью 1 л.с. (746 Вт) и 25 Вт с небольшими двигателями от проигрывателя компакт-дисков, игрушек и привода считывателя компакт-дисков и DVD-дисков.Там, где имеется многофазный источник питания, обычно используется трехфазный (или многофазный) асинхронный двигатель переменного тока, особенно для двигателей большей мощности. Разность фаз между тремя фазами многофазного источника питания создает вращающееся электромагнитное поле в двигателе.
Благодаря электромагнитной индукции вращающееся магнитное поле индуцирует ток в проводниках в роторе, который, в свою очередь, создает уравновешивающее магнитное поле, которое заставляет ротор вращаться в направлении вращения поля.Ротор всегда должен вращаться медленнее, чем вращающееся магнитное поле, создаваемое многофазным источником питания; в противном случае в роторе не будет создаваться уравновешивающее поле.
Асинхронные двигатели являются рабочими лошадками промышленности, и двигатели мощностью до 500 кВт (670 лошадиных сил) производятся в строго стандартизированных размерах корпуса, что делает их практически полностью взаимозаменяемыми между производителями (хотя стандартные размеры в Европе и Северной Америке различаются). Очень большие синхронные двигатели могут иметь выходную мощность в десятки тысяч кВт для трубопроводных компрессоров, приводов в аэродинамической трубе и наземных преобразовательных систем.
В асинхронных двигателях используются два типа роторов.
Роторы с короткозамкнутым ротором: В большинстве двигателей переменного тока используется ротор с короткозамкнутым ротором, который можно найти практически во всех бытовых и легких промышленных двигателях переменного тока. Беличья клетка получила свое название от своей формы — кольца на обоих концах ротора, с перемычками, соединяющими кольца по длине ротора. Обычно это литой алюминий или медь, залитые между железными пластинами ротора, и обычно видны только концевые кольца.Подавляющее большинство токов ротора будет проходить через стержни, а не через ламинаты с более высоким сопротивлением и обычно покрытые лаком. Очень низкие напряжения при очень высоких токах типичны для шин и концевых колец; В двигателях с высоким КПД часто используется литая медь для уменьшения сопротивления ротора.
В работе двигатель с короткозамкнутым ротором можно рассматривать как трансформатор с вращающейся вторичной обмоткой — когда ротор не вращается синхронно с магнитным полем, индуцируются большие токи ротора; большие токи ротора намагничивают ротор и взаимодействуют с магнитными полями статора, чтобы синхронизировать ротор с полем статора.Двигатель с короткозамкнутым ротором без нагрузки при синхронной скорости будет потреблять электроэнергию только для поддержания скорости ротора с учетом потерь на трение и сопротивление; по мере увеличения механической нагрузки будет увеличиваться и электрическая нагрузка — электрическая нагрузка по своей природе связана с механической нагрузкой. Это похоже на трансформатор, где электрическая нагрузка первичной обмотки связана с электрической нагрузкой вторичной обмотки.
Вот почему, например, электродвигатель воздуходувки с короткозамкнутым ротором может приводить к затемнению света в доме при запуске, но не приглушает свет, когда его вентиляторный ремень (и, следовательно, механическая нагрузка) снимается.Кроме того, остановившийся двигатель с короткозамкнутым ротором (перегруженный или с заклинившим валом) будет потреблять ток, ограниченный только сопротивлением цепи, при попытке запуска. Если что-то еще не ограничивает ток (или не отключает его полностью), вероятным результатом является перегрев и разрушение изоляции обмотки.
Практически каждая стиральная машина, посудомоечная машина, отдельный вентилятор, проигрыватель и т. Д. Использует какой-либо вариант двигателя с короткозамкнутым ротором.
Ротор с обмоткой: Альтернативная конструкция, называемая ротором с обмоткой, используется, когда требуется регулировка скорости.В этом случае ротор имеет такое же количество полюсов, что и статор, а обмотки выполнены из проволоки, соединенной с контактными кольцами на валу. Угольные щетки подключают контактные кольца к внешнему контроллеру, например, к переменному резистору, который позволяет изменять скорость скольжения двигателя. В некоторых мощных приводах с регулируемой скоростью вращения ротора энергия частоты скольжения улавливается, выпрямляется и возвращается в источник питания через инвертор.
По сравнению с роторами с короткозамкнутым ротором, двигатели с фазным ротором дороги и требуют обслуживания контактных колец и щеток, но они были стандартной формой для регулирования скорости до появления компактных силовых электронных устройств.Транзисторные инверторы с частотно-регулируемым приводом теперь можно использовать для управления скоростью, а двигатели с фазным ротором становятся все реже. (Транзисторные инверторные приводы также позволяют использовать более эффективные трехфазные двигатели, когда доступен только однофазный сетевой ток, но это никогда не используется в бытовых приборах, поскольку может вызывать электрические помехи и из-за высоких требований к мощности.)
Используются несколько способов запуска многофазного двигателя. Там, где допустимы большой пусковой ток и высокий пусковой момент, двигатель можно запустить через линию, подав полное линейное напряжение на клеммы (Direct-on-line, DOL).Там, где необходимо ограничить пусковой пусковой ток (если двигатель большой по сравнению с мощностью короткого замыкания источника питания), используется пуск с пониженным напряжением с использованием последовательных катушек индуктивности, автотрансформатора, тиристоров или других устройств. Иногда используется метод пуска со звезды на треугольник, когда катушки двигателя сначала соединяются звездой для ускорения нагрузки, а затем переключаются на треугольник, когда нагрузка достигает скорости. Этот метод более распространен в Европе, чем в Северной Америке.Транзисторные приводы могут напрямую изменять приложенное напряжение в зависимости от пусковых характеристик двигателя и нагрузки.
Этот тип двигателя становится все более распространенным в тяговых приложениях, таких как локомотивы, где он известен как асинхронный тяговый двигатель.
Скорость в этом типе двигателя традиционно изменялась за счет наличия дополнительных наборов катушек или полюсов в двигателе, которые можно включать и выключать для изменения скорости вращения магнитного поля. Однако развитие силовой электроники означает, что частота источника питания теперь также может быть изменена, чтобы обеспечить более плавное управление скоростью двигателя.
Трехфазные синхронные двигатели переменного тока
Если соединения с катушками ротора трехфазного двигателя сняты на контактных кольцах и подают отдельный ток возбуждения для создания непрерывного магнитного поля (или если ротор состоит из постоянного магнита), результат называется синхронным. двигатель, потому что ротор будет вращаться синхронно с вращающимся магнитным полем, создаваемым многофазным источником питания.
Синхронный двигатель также может использоваться как генератор переменного тока.
В настоящее время синхронные двигатели часто приводятся в действие транзисторными частотно-регулируемыми приводами. Это значительно облегчает запуск массивного ротора большого синхронного двигателя. Они также могут запускаться как асинхронные двигатели с использованием обмотки с короткозамкнутым ротором, которая имеет общий ротор: как только двигатель достигает синхронной скорости, ток в обмотке с короткозамкнутым ротором не индуцируется, поэтому он мало влияет на синхронную работу двигателя. , помимо стабилизации скорости двигателя при изменении нагрузки.
Синхронные двигатели иногда используются в качестве тяговых двигателей.
Двухфазные серводвигатели переменного тока
Типичный двухфазный серводвигатель переменного тока имеет короткозамкнутый ротор и поле, состоящее из двух обмоток: 1) главной обмотки постоянного напряжения (AC) и 2) обмотки управляющего напряжения (AC) в квадратуре с основная обмотка, чтобы создавать вращающееся магнитное поле. Электрическое сопротивление ротора намеренно повышено, чтобы кривая скорость-крутящий момент была достаточно линейной.Двухфазные серводвигатели по своей сути являются высокоскоростными устройствами с низким крутящим моментом, которые в значительной степени приспособлены для управления нагрузкой.
Однофазные асинхронные двигатели переменного тока
Трехфазные двигатели по своей природе создают вращающееся магнитное поле. Однако, когда доступна только однофазная мощность, вращающееся магнитное поле должно создаваться другими способами. Обычно используются несколько методов.
Обычным однофазным двигателем является двигатель с экранированными полюсами, который используется в устройствах, требующих низкого крутящего момента, таких как электрические вентиляторы или другие небольшие бытовые приборы.В этом двигателе небольшие одновитковые медные «затеняющие катушки» создают движущееся магнитное поле. Часть каждого полюса окружена медной катушкой или лентой; индуцированный ток в перемычке противодействует изменению потока через катушку (закон Ленца), так что максимальная напряженность поля перемещается через поверхность полюса в каждом цикле, создавая необходимое вращающееся магнитное поле.
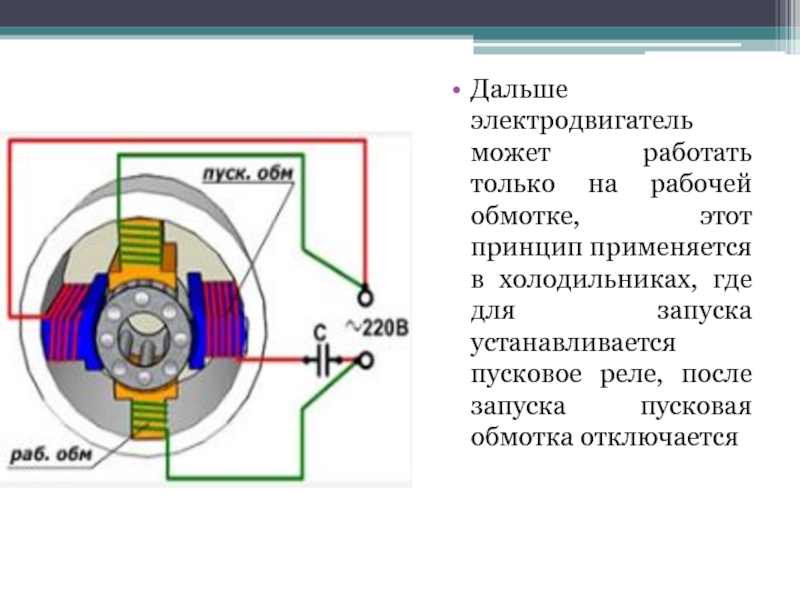
Другой распространенный однофазный двигатель переменного тока — это асинхронный двигатель с расщепленной фазой , обычно используемый в основных бытовых приборах, таких как стиральные машины и сушилки для одежды.По сравнению с двигателями с экранированными полюсами эти двигатели обычно могут обеспечивать гораздо больший пусковой крутящий момент за счет использования специальной пусковой обмотки в сочетании с центробежным переключателем.
В электродвигателях с расщепленной фазой пусковая обмотка спроектирована с более высоким сопротивлением, чем рабочая обмотка. Это создает цепь LR, которая немного сдвигает фазу тока в пусковой обмотке. Когда двигатель запускается, пусковая обмотка подключается к источнику питания через набор подпружиненных контактов, на которые нажимает еще не вращающийся центробежный переключатель.
Фаза магнитного поля в этой пусковой обмотке сдвинута по сравнению с фазой сетевого питания, что позволяет создать движущееся магнитное поле, которое запускает двигатель. Когда двигатель достигает скорости, близкой к расчетной, срабатывает центробежный выключатель, размыкая контакты и отсоединяя пусковую обмотку от источника питания. В этом случае двигатель работает только на ходовой обмотке. Пусковую обмотку необходимо отключить, так как это приведет к увеличению потерь в двигателе.
В пусковом двигателе с конденсатором , пусковой конденсатор вставлен последовательно с пусковой обмоткой, создавая LC-цепь, способную к гораздо большему фазовому сдвигу (и, следовательно, гораздо большему пусковому крутящему моменту). Конденсатор, естественно, увеличивает стоимость таких двигателей.
Другой вариант — двигатель с постоянным разделенным конденсатором (PSC) (также известный как конденсаторный двигатель запуска и работы). Этот двигатель работает аналогично двигателю с конденсаторным пуском, описанному выше, но здесь нет переключателя центробежного пуска, а вторая обмотка постоянно подключена к источнику питания.Двигатели PSC часто используются в кондиционерах, вентиляторах и воздуходувках, а также в других случаях, когда требуется регулируемая скорость.
Отталкивающие двигатели — однофазные двигатели переменного тока с фазным ротором, аналогичные универсальным двигателям. В отталкивающем двигателе щетки якоря закорочены вместе, а не соединены последовательно с полем. Было изготовлено несколько типов отталкивающих двигателей, но наиболее часто использовался асинхронный двигатель с отталкивающим пуском и индукционным приводом (RS-IR).Двигатель RS-IR имеет центробежный переключатель, который закорачивает все сегменты коммутатора, так что двигатель работает как асинхронный двигатель после разгона до полной скорости. Двигатели RS-IR используются для обеспечения высокого пускового момента на ампер в условиях низких рабочих температур и плохого регулирования напряжения источника. По состоянию на 2006 год продано немного отталкивающих двигателей любого типа.
Однофазные синхронные двигатели переменного тока
Небольшие однофазные двигатели переменного тока также могут быть спроектированы с намагниченными роторами (или несколькими вариантами этой идеи).Роторы в этих двигателях не нуждаются в наведенном токе, поэтому они не скользят назад против частоты сети. Вместо этого они вращаются синхронно с частотой сети. Из-за высокой точности скорости такие двигатели обычно используются для питания механических часов, проигрывателей виниловых пластинок и ленточных накопителей; раньше они также широко использовались в приборах точного времени, таких как ленточные самописцы или механизмы привода телескопа. Синхронный двигатель с расщепленными полюсами — это одна из версий.
Моментные двигатели
Моментный двигатель — это особый вид асинхронного двигателя, который может работать неограниченное время при остановке (с заблокированным от вращения ротором) без повреждений.В этом режиме двигатель будет прикладывать постоянный крутящий момент к нагрузке (отсюда и название). Обычное применение моментного двигателя — это двигатели подающей и приемной катушек в ленточном накопителе. В этом приложении, приводимые в действие низким напряжением, характеристики этих двигателей позволяют приложить к ленте относительно постоянное легкое натяжение независимо от того, протягивает ли ведущую ленту мимо головок ленты. Управляемые более высоким напряжением (и, следовательно, обеспечивающие более высокий крутящий момент), моментные двигатели также могут работать в режиме быстрой перемотки вперед и назад, не требуя каких-либо дополнительных механизмов, таких как шестерни или муфты.В компьютерном мире моментные двигатели используются с рулевыми колесами с обратной связью по усилию.
Шаговые двигатели
По конструкции тесно связаны с трехфазными синхронными двигателями переменного тока шаговые двигатели, в которых внутренний ротор, содержащий постоянные магниты или большой железный сердечник с выступающими полюсами, управляется набором внешних магнитов, которые переключаются электронно. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и соленоидом. Поскольку каждая катушка поочередно получает питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением.В отличие от синхронного двигателя, в его применении двигатель не может вращаться непрерывно; вместо этого он «шагает» из одного положения в другое, поскольку обмотки возбуждения последовательно включаются и отключаются. В зависимости от последовательности ротор может вращаться вперед или назад.
Двигатель с постоянными магнитами
Двигатель с постоянными магнитами аналогичен обычному двигателю постоянного тока, за исключением того факта, что обмотка возбуждения заменена постоянными магнитами. Таким образом, двигатель будет действовать как двигатель постоянного тока с постоянным возбуждением (двигатель постоянного тока с независимым возбуждением).
Эти двигатели обычно имеют небольшую мощность, до нескольких лошадиных сил. Они используются в небольших приборах, транспортных средствах с батарейным питанием, в медицинских целях, в другом медицинском оборудовании, таком как рентгеновские аппараты. Эти двигатели также используются в игрушках и в автомобилях в качестве вспомогательных двигателей для регулировки сиденья, электрических стеклоподъемников, люка в крыше, регулировки зеркал, электродвигателей вентилятора, вентиляторов охлаждения двигателя и т.п.
Последняя разработка — двигатели ПСМ для электромобилей.- Высокая эффективность — Минимальный запирающий момент и крутящий момент неровности поверхности — Небольшая занимаемая площадь, компактные размеры — Низкий вес источник [3]
Бесщеточные двигатели постоянного тока
Многие ограничения классического коллекторного двигателя постоянного тока связаны с необходимостью прижимания щеток к коммутатору. Это создает трение. На более высоких скоростях щеткам становится все труднее поддерживать контакт. Щетки могут отскакивать от неровностей поверхности коллектора, создавая искры.Это ограничивает максимальную скорость машины. Плотность тока на единицу площади щеток ограничивает мощность двигателя. Неидеальный электрический контакт также вызывает электрические помехи. Щетки со временем изнашиваются и требуют замены, а сам коллектор подлежит износу и техническому обслуживанию. Сборка коммутатора на большой машине — дорогостоящий элемент, требующий точной сборки многих деталей.
Эти проблемы устранены в бесщеточном двигателе. В этом двигателе механический «вращающийся переключатель» или узел коммутатора / щеточного устройства заменен внешним электронным переключателем, синхронизированным с положением ротора.Бесщеточные двигатели обычно имеют КПД 85-90 процентов, тогда как двигатели постоянного тока с щеткой обычно имеют КПД 75-80 процентов.
На полпути между обычными двигателями постоянного тока и шаговыми двигателями находится область бесщеточных двигателей постоянного тока. Построенные по принципу, очень похожему на шаговые двигатели, они часто используют внешний ротор с постоянным магнитом , три фазы управляющих катушек, одно или несколько устройств на эффекте Холла для определения положения ротора и соответствующую приводную электронику. В специализированном классе контроллеров бесщеточных двигателей постоянного тока для определения положения и скорости используется обратная связь по ЭДС через основные фазовые соединения вместо датчиков Холла.Эти двигатели широко используются в электрических радиоуправляемых транспортных средствах и упоминаются моделистами как двигатели outrunner (поскольку магниты находятся снаружи).
Бесщеточные двигатели постоянного тока обычно используются там, где требуется точное управление скоростью, в дисководах компьютеров или в видеомагнитофонах, шпинделях в приводах компакт-дисков, компакт-дисков (и т. Д.), А также в механизмах офисных изделий, таких как вентиляторы, лазерные принтеры и копировальные аппараты. . У них есть несколько преимуществ перед обычными моторами:
- По сравнению с вентиляторами переменного тока, использующими двигатели с экранированными полюсами, они очень эффективны и работают намного холоднее, чем эквивалентные двигатели переменного тока.Такой холодный режим работы приводит к значительному увеличению срока службы подшипников вентилятора.
- Без изнашиваемого коммутатора срок службы бесщеточного двигателя постоянного тока может быть значительно больше по сравнению с двигателем постоянного тока, использующим щетки и коммутатор. Коммутация также имеет тенденцию вызывать большое количество электрических и радиочастотных помех; без коммутатора или щеток бесщеточный двигатель может использоваться в электрически чувствительных устройствах, таких как звуковое оборудование или компьютеры.
- Те же устройства на эффекте Холла, которые обеспечивают коммутацию, могут также обеспечивать удобный сигнал тахометра для приложений с замкнутым контуром (сервоуправлением).В вентиляторах сигнал тахометра может использоваться для получения сигнала «вентилятор исправен».
- Двигатель можно легко синхронизировать с внутренними или внешними часами, что позволяет точно регулировать скорость.
- Бесщеточные двигатели не имеют шансов на искрение, в отличие от щеточных двигателей, что делает их более подходящими для сред с летучими химическими веществами и топливом.
Современные бесщеточные двигатели постоянного тока имеют мощность от долей ватта до многих киловатт. В электромобилях используются более мощные бесщеточные двигатели мощностью до 100 кВт.Они также находят значительное применение в высокопроизводительных электрических моделях самолетов.
Двигатели постоянного тока без сердечника
Ничто в конструкции любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались; крутящий момент действует только на обмотки электромагнитов. Этим фактом пользуется бесщеточный электродвигатель постоянного тока , специализированная форма щеточного электродвигателя постоянного тока. Эти двигатели, оптимизированные для быстрого разгона, имеют ротор без железного сердечника.Ротор может иметь форму заполненного обмоткой цилиндра внутри магнитов статора, корзины, окружающей магниты статора, или плоского блина (возможно, сформированного на печатной монтажной плате), проходящего между верхним и нижним магнитами статора. Обмотки обычно стабилизируются путем пропитки эпоксидной смолой.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, сформированный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее 1 мс.Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая могла бы служить радиатором, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом.
Эти двигатели обычно использовались для привода приводов магнитных лентопротяжных устройств и до сих пор широко используются в высокопроизводительных системах с сервоуправлением.
Двигатели линейные
Линейный двигатель — это, по сути, электродвигатель, который был «раскручен» так, что вместо создания крутящего момента (вращения) он создает линейную силу по всей своей длине, создавая бегущее электромагнитное поле.
Линейные двигатели чаще всего представляют собой асинхронные двигатели или шаговые двигатели. Вы можете найти линейный двигатель в поезде на магнитной подвеске (Transrapid), где поезд «летит» над землей.
Электродвигатель с двойным питанием
Электродвигатели с двойным питанием или Электромашины с двойным питанием включают в себя две группы многофазных обмоток с независимым питанием, которые активно участвуют в процессе преобразования энергии (т. скорость от субсинхронной до сверхсинхронной.В результате электродвигатели с двойной подачей питания представляют собой синхронные машины с эффективным диапазоном скорости с постоянным крутящим моментом, который в два раза превышает синхронную скорость для данной частоты возбуждения. Это вдвое больше диапазона скоростей с постоянным крутящим моментом, чем у электрических машин с одиночным питанием, в которых используется одна активная обмотка. Теоретически этот атрибут имеет привлекательные разветвления по стоимости, размеру и эффективности по сравнению с электрическими машинами с одинарным питанием, но двигатели с двойным питанием трудно реализовать на практике.
Электрические машины с двойным питанием и бесщеточным ротором с двойным питанием, бесщеточные электрические машины с двойным питанием и так называемые бесщеточные электрические машины с двойным питанием — единственные примеры синхронных электрических машин с двойным питанием.
Электродвигатель с однополярным питанием
Электродвигатели с однополярным питанием или электрические машины с однополярным питанием включают в себя набор с одной многофазной обмоткой, которые активно участвуют в процессе преобразования энергии (т. Е. С одинарным питанием). Электромашины с однополярным питанием работают либо по индукционным (т.е. асинхронным), либо по синхронным принципам. Комплект активной обмотки может управляться электроникой для оптимальной производительности. Индукционные машины демонстрируют пусковой момент и могут работать как автономные машины, но синхронные машины должны иметь вспомогательные средства для запуска и практической работы, такие как электронный контроллер.
Асинхронные двигатели (т. Е. С короткозамкнутым ротором или с фазным ротором), синхронные двигатели (т. Е. С возбуждением от поля, двигатели с постоянными магнитами или бесщеточные двигатели постоянного тока, реактивные двигатели и т. Д.), Которые обсуждаются на этой странице, являются примеры двигателей с однополярным питанием. Безусловно, двигатели с однополярным питанием — это преимущественно устанавливаемые двигатели.
Двигатель с двумя механическими портами
Электродвигатели с двумя механическими портами (или электродвигатели DMP) считаются новой концепцией электродвигателей.Точнее, электродвигатели DMP — это на самом деле два электродвигателя (или генератора), занимающие один и тот же корпус. Каждый двигатель работает по традиционным принципам электродвигателя. Электрические порты, которые могут включать в себя электронную опору электродвигателей, связаны с одним электрическим портом, в то время как два механических порта (вала) доступны снаружи. Теоретически ожидается, что физическая интеграция двух двигателей в один увеличит удельную мощность за счет эффективного использования в противном случае ненужной площади магнитного сердечника.Механика интеграции, например, для двух механических валов, может быть довольно экзотической.
Наномотор с нанотрубками
Исследователи из Калифорнийского университета в Беркли разработали подшипники вращения на основе многослойных углеродных нанотрубок. Прикрепив золотую пластину (размером порядка 100 нм) к внешней оболочке подвешенной многослойной углеродной нанотрубки (например, вложенных углеродных цилиндров), они могут электростатически вращать внешнюю оболочку относительно внутреннего ядра.Эти подшипники очень прочные; Устройства колебались тысячи раз без признаков износа. Работа была сделана на месте в SEM. Эти наноэлектромеханические системы (НЭМС) являются следующим шагом в миниатюризации, которая в будущем может найти применение в коммерческих целях.
На этом рендере можно увидеть процесс и технологию.
Пускатели электродвигатели
Противо-ЭДС помогает сопротивлению якоря ограничивать ток через якорь. При первом подаче питания на двигатель якорь не вращается.В этот момент противоэдс равна нулю, и единственным фактором, ограничивающим ток якоря, является сопротивление якоря. Обычно сопротивление якоря двигателя меньше одного Ом; поэтому ток через якорь при подаче питания будет очень большим. Этот ток может вызвать чрезмерное падение напряжения, что повлияет на другое оборудование в цепи. Или просто отключите устройства защиты от перегрузки.
- Следовательно, возникает необходимость в дополнительном сопротивлении, включенном последовательно с якорем, для ограничения тока до тех пор, пока вращение двигателя не сможет создать противоэдс.По мере увеличения вращения двигателя сопротивление постепенно снижается.
Стартер трехточечный
Входящая мощность обозначается как L1 и L2. Компоненты, обозначенные пунктирными линиями, образуют трехточечный стартер. Как следует из названия, есть только три соединения с пускателем. Подключения к якорю обозначены как A1 и A2. Концы катушки возбуждения (возбуждения) обозначены как F1. и F2. Для управления скоростью полевой реостат соединен последовательно с шунтирующим полем.Одна сторона линии соединена с рычагом стартера (на схеме обозначена стрелкой). Рычаг подпружинен, поэтому он вернется в положение «Выкл.», Которое не удерживается ни в каком другом положении.
- На первом этапе плеча полное линейное напряжение прикладывается к полю шунта. Поскольку полевой реостат обычно устанавливается на минимальное сопротивление, скорость двигателя не будет чрезмерной; кроме того, двигатель будет развивать большой пусковой крутящий момент.
- Стартер также соединяет электромагнит последовательно с шунтирующим полем.Он будет удерживать рычаг в положении, когда рычаг соприкасается с магнитом.
- Между тем это напряжение подается на шунтирующее поле, а пусковое сопротивление ограничивает прохождение тока к якорю.
- По мере того, как двигатель набирает скорость, нарастает противо-ЭДС, рычаг медленно перемещается в положение короткого замыкания.
Стартер четырехпозиционный
Четырехточечный стартер устраняет недостаток трехточечного стартера. В дополнение к тем же трем точкам, которые использовались с трехточечным стартером, другая сторона линии, L1, является четвертой точкой, подведенной к стартеру.Когда рычаг перемещается из положения «Выкл.», Катушка удерживающего магнита подключается к линии. Удерживающий магнит и пусковые резисторы работают так же, как и в трехпозиционном пускателе.
- Возможность случайного размыкания цепи возбуждения весьма мала. Четырехточечный пускатель обеспечивает защиту двигателя от обесточивания. В случае сбоя питания двигатель отключается от сети.
См. Также
Компоненты:
- Центробежный переключатель
- Коммутатор (электрический)
- Контактное кольцо
Ученые и инженеры:
Приложения:
- Пила настольная
- Электромобиль
- Коррекция коэффициента мощности
Другое:
- Электротехника
- Электрический элемент
- Электрогенератор
- Список тем по электронике
- Перечень технологий
- Теорема о максимальной мощности
- Мотор-генератор
- Контроллер мотора
- Способ движения
- Электроэнергия однофазная
- Хронология развития двигателей и двигателей
Примечания
- ↑ Tesla’s Early Years PBS.org .
- ↑ Патент США 0416194, «Электродвигатель», декабрь 1889 г.
- ↑ Патент США 0416194, «Электродвигатель», декабрь 1889 г.
- ↑ [1] electrichistory.com .
- ↑ [2] redlandsweb.com .
Список литературы
- Бедфорд Б. Д., Р. Г. Хофт и др. 1964. Принципы инверторных цепей. Нью-Йорк: John Wiley & Sons, Inc. ISBN 0471061344. (Для управления скоростью двигателя с регулируемой частотой используются схемы инвертора)
- Чиассон, Джон Н.2005. Моделирование и высокопроизводительное управление электрическими машинами , Нью-Йорк, Нью-Йорк: Wiley-IEEE Press. ISBN 047168449X.
- Fink, Donald G .; Бити, Х. Уэйн (1978). Стандартный справочник для инженеров-электриков, одиннадцатое издание. Нью-Йорк, Нью-Йорк: Макгроу-Хилл. ISBN 007020974X.
- Фицджеральд, А. Э., Чарльз Кингсли младший, Стивен Д. Уманс. 2002. Электрические машины. Колумбус, Огайо: McGraw-Hill Science / Engineering / Math. ISBN 0073660094.
- Хьюстон, Эдвин Дж.; Артур Кеннелли, (1902) Последние типы динамо-электрических машин. , авторское право American Technical Book Company 1897, Нью-Йорк, Нью-Йорк: P.F. Кольер и сыновья. ASIN: B000874XH6
- Купхальдт, Тони Р. Уроки электрических цепей — Том II. 2000-2006. Глава 13 ДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА. дата обращения 11 апреля 2006 г.
- Пелли, Б. Р. (1971). Тиристорные преобразователи с фазовым управлением и циклоконвертеры. Хобокен, Нью-Джерси: John Wiley & Sons. ISBN 0471677906
- Шейнфилд Д.Дж. (2001). Промышленная электроника для инженеров, химиков и техников. Норвич, Нью-Йорк: Издательство Уильяма Эндрю. ISBN 0815514670.
- Smith, A.O. Переменного и постоянного тока электродвигателей. [4]. accessdate 11.04.2006
Внешние ссылки
Все ссылки получены 18 сентября 2017 г.
Кредиты
Энциклопедия Нового Света Писатели и редакторы переписали и завершили статью Википедия в соответствии со стандартами New World Encyclopedia .Эта статья соответствует условиям лицензии Creative Commons CC-by-sa 3.0 (CC-by-sa), которая может использоваться и распространяться с указанием авторства. Кредит предоставляется в соответствии с условиями этой лицензии, которая может ссылаться как на участников Энциклопедии Нового Света, участников, так и на самоотверженных добровольцев Фонда Викимедиа. Чтобы процитировать эту статью, щелкните здесь, чтобы просмотреть список допустимых форматов цитирования. История более ранних публикаций википедистов доступна исследователям здесь:
История этой статьи с момента ее импорта в Энциклопедия Нового Света :
Примечание. Некоторые ограничения могут применяться к использованию отдельных изображений, на которые распространяется отдельная лицензия.
Различные типы двигателей и их применение
При покупке двигателя часто спрашивают, какая технология лучше, переменного или постоянного тока, но дело в том, что это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного токаобладают высокой гибкостью по многим функциям, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока, некоторые из ключевых преимуществ:
- Низкое энергопотребление при запуске
- Управляемое ускорение
- Регулируемая рабочая скорость
- Управляемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение нарушений в ЛЭП
Текущая тенденция для VSD заключается в добавлении дополнительных функций и функций программируемого логического управления (ПЛК), которые добавляют преимущества, но требуют большего технического опыта во время обслуживания.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока от RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока, а скорость остается постоянной при переменных нагрузках, поэтому он идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы. , КИПиА
Щелкните здесь, чтобы увидеть пример синхронного двигателя из RS
Индукция (асинхронная)
Этот тип двигателя использует электромагнитную индукцию из магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента.Это наиболее распространенный тип двигателей переменного тока, который важен для промышленности из-за их нагрузочной способности, при этом однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовой технике, тогда как трехфазные асинхронные двигатели чаще используются в промышленности. приложения, включая компрессоры, насосы, конвейерные системы и подъемные механизмы.
Нажмите здесь, чтобы увидеть пример асинхронного двигателя RS
Двигатели постоянного тока
Двигатели постоянного токабыли первым широко используемым типом двигателей, и начальные затраты на системы (двигатели и привод) обычно ниже, чем на системы переменного тока для маломощных агрегатов.Однако при более высокой мощности общие затраты на техническое обслуживание увеличиваются, и это необходимо учитывать. Скорость двигателей постоянного тока можно регулировать путем изменения напряжения питания, они доступны в широком диапазоне напряжений, наиболее популярные типы — 12 и 24 В. Преимущества двигателя постоянного тока:
- Простая установка
- Регулировка скорости в широком диапазоне
- Быстрый запуск, остановка, реверсирование и ускорение
- Высокий пусковой крутящий момент
- Линейная кривая скорость-крутящий момент
Двигатели постоянного тока широко используются в небольших инструментах и бытовой технике, вплоть до электромобилей, подъемников и подъемников
Щелкните здесь, чтобы увидеть пример двигателей постоянного тока от RS
Два общих типа:
матовый
Это более традиционный тип двигателя, который обычно используется в чувствительных к стоимости приложениях, где система управления относительно проста, например, в потребительских приложениях и более простом промышленном оборудовании, эти типы двигателей можно разбить на:
- Series Wound — здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а регулирование скорости осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента на двигателе скорость падает.Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку он имеет высокий пусковой крутящий момент.
- Shunt Wound — Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости за счет увеличения тока двигателя. Он имеет средний уровень пускового момента при постоянной скорости, поэтому подходит для таких применений, как токарные станки, пылесосы, конвейеры и шлифовальные машины.
- Составная обмотка — это совокупность последовательностей и шунтов, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям.Этот тип имеет высокий пусковой крутящий момент и может плавно работать при незначительном изменении нагрузки. Он используется для привода компрессоров, центробежных насосов с регулируемым напором, ротационных прессов, дисковых пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, где требуется точное управление и низкий крутящий момент, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы для интенсивных применений), и имеют более простую механическую конструкцию (не имеют щеток).Контроллер мотора использует датчики Холла для определения положения ротора, с помощью этого контроллер может точно управлять мотором посредством тока в катушках ротора) для регулирования скорости. Преимущества этой технологии — долгий срок службы, небольшие затраты на обслуживание и высокий КПД (85-90%), тогда как недостатки — более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для регулирования скорости и положения в приложениях, где требуется надежность и устойчивость, таких как вентиляторы, насосы и компрессоры.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением с разомкнутым контуром, от принтеров до промышленных приложений, таких как высокоскоростное оборудование для захвата и размещения.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет управлять скоростью, крутящим моментом и положением двигателя, а интеллектуальная электроника управляет всеми тремя, поэтому, если для быстрого ускорения до определенной скорости требуется больший крутящий момент, то подается больший ток. , они известны как бесщеточные сервомоторы.
Пример щеточного и бесщеточного двигателей постоянного тока
Принципы работы — преобразователи частоты переменного тока
a. Асинхронные двигатели переменного тока
Асинхронный двигатель переменного тока состоит из ротора, обмотки которого пересекают вращающееся магнитное поле, создаваемое обмотками статора.
При полной скорости нагрузки ротор вращается немного медленнее, чем синхронная скорость двигателя. Это связано с тем, что магнитное поле заставляет токи течь в обмотках ротора и создает крутящий момент, который вращает ротор; поэтому, если ротор вращается с той же скоростью, что и магнитное поле, не будет относительного движения между ротором и магнитным полем, и крутящий момент не будет создаваться.
Скорость, с которой ротор отстает от вращающегося магнитного поля, называется скольжением двигателя. Чем выше скольжение, тем больший крутящий момент вырабатывает двигатель.
Скорость вращения магнитного поля зависит от количества полюсов или катушек, распределенных вокруг статора, и частоты тока питания. Это называется синхронной скоростью.
Синхронная скорость = 120 x частота
Количество полюсов
Типичные скорости асинхронного двигателя переменного тока составляют 3600, 1800, 1200 и 900 об / мин.
На следующей диаграмме показано соотношение крутящего момента и скорости типичного асинхронного двигателя.
Рисунок 4: Кривая крутящего момента-скорости асинхронного двигателя.
Текстовая версия: Рисунок 4Рисунок 4
График с начальным крутящим моментом по вертикальной оси от 0 до 200 и% скоростью по горизонтальной оси от 0 до 100.
Линия на графике начинается при 160 пусковом моменте и 0% скорости и изгибается вниз до 125 пускового момента при 25% скорости, где она начинает изгибаться обратно вверх, пока не достигнет пика 200 пускового момента при скорости 75%.Построенная линия затем падает до 0 пускового момента при 100% скорости. Начальная нисходящая кривая обозначена как «Момент отрыва», а спад после пика обозначен как «Момент пробоя».
г. Асинхронные двигатели переменного тока с короткозамкнутым ротором
Большинство асинхронных двигателей переменного тока — это двигатели с короткозамкнутым ротором.
Обмотки ротора в двигателе с короткозамкнутым ротором представляют собой стержни из алюминия или медного сплава, которые расположены вдоль направления вала и закорочены концевыми кольцами, как показано на следующей схеме.
Рисунок 5: Схема ротора с короткозамкнутым ротором
Форма стержней и прочность сплава, используемого в их конструкции, влияют на характеристики крутящего момента двигателя.
г. Частотно-регулируемые приводы с широтно-импульсной модуляцией
При работе от источника питания постоянной частоты (обычно 60 Гц) асинхронные двигатели переменного тока являются устройствами с фиксированной скоростью.
Частотно-регулируемый привод управляет скоростью двигателя переменного тока, изменяя частоту, подаваемую на двигатель.
Привод также регулирует выходное напряжение пропорционально выходной частоте, чтобы обеспечить относительно постоянное отношение напряжения к частоте (В / Гц), как того требуют характеристики двигателя переменного тока для создания соответствующего крутящего момента.
Первым шагом в этом процессе является преобразование напряжения питания переменного тока в постоянное с помощью выпрямителя. Источник постоянного тока содержит пульсации напряжения, которые сглаживаются конденсаторами фильтра. Эту часть частотно-регулируемого привода часто называют звеном постоянного тока.
Это постоянное напряжение затем преобразуется обратно в переменное. Это преобразование обычно достигается за счет использования силовых электронных устройств, таких как силовые транзисторы IGBT, с использованием метода, называемого широтно-импульсной модуляцией (PWM). Выходное напряжение включается и выключается с высокой частотой, с длительностью включения или шириной импульса, контролируемой для приближения синусоидальной формы волны.
В более старых технологиях приводов, таких как инверторы источников тока и контроллеры переменного напряжения, в качестве устройств управления использовались тиристоры или тиристоры.Эти технологии теперь заменены ЧРП с ШИМ.
Весь процесс контролируется микропроцессором, который контролирует:
- входное напряжение питания,
- уставка скорости,
- Напряжение промежуточного контура,
- выходное напряжение и ток для обеспечения работы двигателя в установленных параметрах.
Принципиальная схема частотно-регулируемого привода с широтно-импульсной модуляцией
График сравнения напряжения и тока для частотно-регулируемого привода с широтно-импульсной модуляцией
Рисунок 6: Блок-схема типичного ЧРП с ШИМ
В простейших приводах или приложениях задание скорости — это просто уставка; однако в более сложных приложениях задание скорости поступает от контроллера процесса, такого как программируемый логический контроллер (ПЛК) или тахометр.
Предыдущая | Содержание | След.
% PDF-1.4 % 835 0 объект > эндобдж xref 835 135 0000000016 00000 н. 0000003070 00000 н. 0000003302 00000 н. 0000003456 00000 н. 0000003495 00000 н. 0000003552 00000 н. 0000003617 00000 н. 0000004489 00000 н. 0000004760 00000 н. 0000004827 00000 н. 0000004925 00000 н. 0000005031 00000 н. 0000005149 00000 п. 0000005209 00000 н. 0000005371 00000 п. 0000005544 00000 н. 0000005644 00000 н. 0000005799 00000 н. 0000005914 00000 н. 0000006013 00000 н. 0000006146 00000 н. 0000006256 00000 н. 0000006403 00000 п. 0000006525 00000 н. 0000006664 00000 н. 0000006830 00000 н. 0000006942 00000 н. 0000007128 00000 н. 0000007286 00000 н. 0000007404 00000 н. 0000007536 00000 н. 0000007699 00000 н. 0000007789 00000 н. 0000007920 00000 п. 0000008073 00000 н. 0000008213 00000 н. 0000008337 00000 н. 0000008494 00000 п. 0000008683 00000 н. 0000008863 00000 н. 0000009009 00000 н. 0000009172 00000 н. 0000009293 00000 п. 0000009474 00000 н. 0000009577 00000 н. 0000009758 00000 н. 0000009878 00000 н. 0000009997 00000 н. 0000010123 00000 п. 0000010307 00000 п. 0000010480 00000 п. 0000010577 00000 п. 0000010731 00000 п. 0000010843 00000 п. 0000011016 00000 п. 0000011121 00000 п. 0000011266 00000 п. 0000011384 00000 п. 0000011571 00000 п. 0000011728 00000 п. 0000011887 00000 п. 0000012079 00000 п. 0000012211 00000 п. 0000012384 00000 п. 0000012588 00000 п. 0000012712 00000 п. 0000012890 00000 н. 0000012990 00000 п. 0000013164 00000 п. 0000013287 00000 п. 0000013407 00000 п. 0000013558 00000 п. 0000013692 00000 п. 0000013848 00000 п. 0000013956 00000 п. 0000014053 00000 п. 0000014179 00000 п. 0000014291 00000 п. 0000014389 00000 п. 0000014509 00000 п. 0000014604 00000 п. 0000014698 00000 п. 0000014791 00000 п. 0000014884 00000 п. 0000014977 00000 п. 0000015071 00000 п. 0000015165 00000 п. 0000015259 00000 п. 0000015353 00000 п. 0000015447 00000 п. 0000015541 00000 п. 0000015635 00000 п. 0000015729 00000 п. 0000015823 00000 п. 0000015917 00000 п. 0000016011 00000 п. 0000016105 00000 п. 0000016199 00000 п. 0000016294 00000 п. 0000016388 00000 п. 0000016483 00000 п. 0000016577 00000 п. 0000016769 00000 п. 0000016923 00000 п. 0000017255 00000 п. 0000017466 00000 п. 0000018223 00000 п. 0000018245 00000 п. 0000019250 00000 п. 0000019272 00000 н. 0000020068 00000 н. 0000020829 00000 п. 0000021051 00000 п. 0000021073 00000 п. 0000021935 00000 п. 0000021958 00000 п. 0000023083 00000 п. 0000023106 00000 п. 0000024230 00000 п. 0000024253 00000 п. 0000025385 00000 п. 0000025910 00000 п. 0000026675 00000 п. 0000026896 00000 п. 0000027114 00000 п. 0000027137 00000 п. 0000028276 00000 п. 0000028298 00000 п. 0000029311 00000 п. 0000029451 00000 п. 0000033535 00000 п. 0000033775 00000 п. 0000033980 00000 п. 0000003658 00000 п. 0000004467 00000 н. трейлер ] >> startxref 0 %% EOF 836 0 объект > эндобдж 837 0 объект a_
Как работают асинхронные двигатели?
Двигатели переменного тока — это электродвигатели, приводимые в действие переменным током (AC).Двигатели переменного тока широко используются в промышленности, в первую очередь из-за их высокого КПД и их способности создавать постоянный крутящий момент до номинальной скорости.
Типы двигателей переменного тока
Два наиболее широко используемых типа двигателей переменного тока — это асинхронные двигатели и синхронные двигатели.
Трехфазный асинхронный двигатель переменного тока повышенной эффективности IronHorse®
Как работают асинхронные двигатели
Двумя основными частями двигателя переменного тока являются статор (неподвижный внешний барабан) и ротор; вращающаяся внутренняя часть двигателя, которая прикреплена к валу двигателя (и приводит в движение).И статор, и ротор создают вращающиеся магнитные поля. В обмотках статора это вращающееся поле обеспечивается синусоидальной природой переменного тока. В роторе магнитное поле создается постоянными магнитами, реактивным сопротивлением или дополнительными электрическими обмотками.
Синхронные двигатели работают синхронно с частотой питающего тока, поскольку их роторы имеют либо постоянные магниты, либо электромагниты, генерирующие вращающееся электромагнитное поле.
В асинхронном двигателе магнитное поле в обмотках ротора «индуцируется» магнитным полем статора. Чтобы эта индукция создавала крутящий момент, скорость поля ротора должна отставать от поля магнитного поля статора. Этот дифференциал скоростей известен как «скольжение» и является причиной того, что асинхронные двигатели будут иметь номинальное число оборотов, указанное на паспортной табличке, примерно на 5% меньше, чем их синхронная скорость. Например, модель Ironhorse MTRP-001-3DB18 (1 л.с., трехфазный, четырехполюсный, асинхронный двигатель переменного тока) имеет номинальную синхронную скорость 1800 об / мин (при условии мощности 60 Гц), но номинальная частота вращения на паспортной табличке составляет 1760 об / мин.Этот вал двигателя будет вращаться со скоростью 1760 об / мин при питании «поперек линии» с трехфазным питанием 60 Гц по стандарту США.
Отличия от двигателей постоянного тока
Промышленные двигатели постоянного тока исторически были щеточными. Двигатели постоянного тока со щетками и коммутаторами имеют ряд недостатков по сравнению с двигателями переменного тока: дополнительное обслуживание (замена щеток), ограниченные диапазоны скоростей и общий ожидаемый срок службы меньше. Асинхронные двигатели переменного тока не имеют щеток и имеют гораздо более длительный срок службы.
Скорость двигателя постоянного тока регулируется путем изменения тока якоря, в то время как управление скоростью двигателя переменного тока достигается путем изменения частоты переменного тока, часто с помощью частотно-регулируемого привода (VFD).
Бесщеточные двигатели постоянного токастали доступны в течение последних нескольких десятилетий, прежде всего в результате появления полупроводниковых схем управления, необходимых для их работы, а также наличия высококачественных постоянных магнитов. Бесщеточные двигатели постоянного тока не требуют щеток или физического коммутатора и, следовательно, имеют увеличенный срок службы.Они также преодолевают ограничения скорости щеточных версий.
Управление двигателем переменного тока
Когда требуется простое включение / выключение, часто используются контакторы или ручные пускатели двигателей. Контакторы (большие трехфазные реле) позволяют ПЛК или другому контроллеру переключать питание на двигатель переменного тока. Реверсивные пускатели двигателей представляют собой специализированные версии с двумя контакторами, подключенными таким образом, что они также позволяют изменять направление вращения вала двигателя. Ручные пускатели двигателей включают ручку с ручным управлением, которая позволяет оператору переключать мощность.Все эти типы известны как «поперечное» управление — двигатель подключается непосредственно к «линии» входящего питания (через контактор или пускатель двигателя).
Устройства плавного пуска
Устройства плавного пуска— это более сложные средства управления двигателем, которые позволяют использовать линейные изменения ускорения и замедления для более плавной остановки и запуска двигателей, чем это возможно при поперечном управлении. В устройствах плавного пуска обычно используются кремниевые управляющие выпрямители (управление тиристором) для постепенного увеличения или уменьшения угла зажигания для медленного увеличения или уменьшения количества используемой энергии и обеспечения более плавного пуска или замедления по сравнению с пускателем двигателя, подключенным к сети. .Устройства плавного пуска снижают износ двигателя и любых подключенных механических устройств, а также резко снижают пусковой ток, необходимый для запуска двигателя. Для больших двигателей это может иметь серьезные последствия для снижения затрат на коммунальные услуги.
Регулятор скорости (VFD)
Трехфазные асинхронные двигатели переменного тока иногда получают питание от частотно-регулируемых приводов (ЧРП), которые, как следует из их названия, изменяют частоту мощности, подаваемой на двигатель, для изменения скорости двигателя.Эти устройства принимают стандартную входную мощность 60 Гц (одно- или трехфазную), преобразуют ее в постоянный ток, а затем используют широтно-импульсную модуляцию (ШИМ) для создания моделируемой мощности переменного тока любой частоты, необходимой для вращения двигателя с заданной скоростью. Подробнее о ЧРП здесь.
Однофазный режим
Также доступны однофазные асинхронные двигатели переменного тока. Эти двигатели требуют специальной схемы для запуска (пусковые конденсаторы и центробежные переключатели), но работают так же, как их трехфазные аналоги, когда они вращаются.Однофазные асинхронные двигатели переменного тока несовместимы с частотно-регулируемыми приводами и могут привести к более высоким расходам на коммунальные услуги из-за своей несбалансированной нагрузки в электросети.
Как указать двигатели переменного тока
Если вы указываете двигатель для нового приложения, начните с определения требуемого напряжения, скорости и мощности, а также типа приложения, как подробно описано в этой статье.
Если вы заменяете двигатель подходящего размера в существующем приложении, вы можете найти всю необходимую информацию на паспортной табличке существующего двигателя.См. Этот информационный документ «Важные соображения по замене и определению размеров электродвигателей переменного тока», чтобы узнать, как определить, перематывать или заменять электродвигатель, и как найти электродвигатель подходящего размера для вашего применения.
Помимо стандартных спецификаций для скорости двигателя, мощности и рабочего напряжения, проектировщики должны также учитывать конструкцию NEMA (соотношение скорость-крутящий момент-проскальзывание), тип корпуса и условия охлаждения (если таковые имеются), размер корпуса и варианты монтажа. Вот несколько рекомендаций:
Классификация проектов NEMA
Существует четыре различных проектных классификации NEMA по скорости, крутящему моменту и скольжению, которые помогают определить пригодность для различных приложений:
- NEMA, конструкция A; подходит для широкого спектра применений — например, для вентиляторов и насосов.Двигатели имеют максимальное скольжение 5%, пусковой ток от высокого до среднего, нормальный момент заторможенного ротора и нормальный момент пробоя.
- NEMA дизайн B; предназначен для широкого спектра применений с нормальным пусковым моментом (вентиляторы, нагнетатели и насосы). Двигатели имеют максимальное скольжение 5%, низкий пусковой ток, высокий крутящий момент заблокированного ротора и нормальный момент пробоя.
- NEMA, дизайн C; предназначен для оборудования с высокоинерционным пуском — например, поршневых насосов прямого вытеснения. Двигатели имеют максимальное скольжение 5%, низкий пусковой ток, высокий крутящий момент заблокированного ротора и нормальный момент пробоя.
- NEMA дизайн D; предназначен для оборудования с очень большим моментом инерции пусков (краны, подъемники и т. д.). Двигатели имеют максимальное скольжение 5-13%, низкий пусковой ток и очень высокий крутящий момент заблокированного ротора.
Тип корпуса и охлаждение
Распространенные типы корпусов включают защиту от капель (DP), полностью закрытые с вентиляторным охлаждением (TEFC) и полностью закрытые без вентиляции (TENV).
- Каплестойкие двигатели — это двигатели с открытой рамой, предназначенные для внутреннего применения в чистой окружающей среде.Вентиляционные отверстия предназначены для предотвращения попадания падающих твердых частиц и жидкостей. Двигатели
- TEFC имеют вентилятор, прикрепленный к задней части вала двигателя, чтобы помочь охладить двигатель. Несмотря на то, что в корпусе двигателя нет вентиляционных отверстий, корпус не герметичен для воздуха или жидкости. Хотя двигатель TEFC может работать при более высокой температуре окружающей среды, будьте осторожны на низких скоростях (под управлением VFD), поскольку охлаждающий вентилятор прикреплен к валу двигателя, и ему может потребоваться определенная минимальная скорость для эффективного охлаждения двигателя. Двигатели
- TENV также не имеют вентиляции, но корпус не герметичен для воздуха или жидкости.
Дополнительные классификации включают двигатели, рассчитанные на промывку (TEWD), взрывозащищенные двигатели (XPRF) и двигатели, предназначенные для использования во взрывоопасных зонах (HAZ).
Размер рамы и установка
Большинство двигателей переменного тока сегодня построено для определенных размеров NEMA. В небольших диапазонах мощности многие двигатели доступны в размере корпуса «NEMA 56C». «56» относится к размерам корпуса двигателя. «C» обозначает двигатель, устанавливаемый на поверхность «C» (фланец).Это самый популярный тип двигателя с торцевым креплением, который имеет особую схему расположения болтов на конце вала, позволяющую производить монтаж. Критическими размерами двигателей с C-образной гранью являются окружность болта, диаметр приводного устройства и размер вала. Двигатели с фланцем C всегда имеют резьбовые монтажные отверстия на лицевой стороне двигателя. Многие двигатели предлагаются как с вариантами монтажа C-Face, так и с жесткой или съемной монтажной базой. По мере увеличения мощности используется ряд различных обозначений Т-образной рамы для обозначения стандартных размеров NEMA.
К VFD или нет к VFD
Если вы планируете использовать асинхронный двигатель переменного тока с частотно-регулируемым приводом (VFD) — существует ряд дополнительных соображений, ознакомьтесь с нашей статьей «В VFD или нет в VFD».
Для получения дополнительной информации о спецификациях и размерах двигателей всех типов щелкните здесь.