принцип, теория работы и применение
Мы узнали о различных типах электродвигателей в нашей предыдущей статье. Теперь мы начнем узнавать об этих моторах индивидуально. В этой статье мы рассмотрим теорию работы синхронного двигателя и его строение.
Принцип синхронного двигателя
Основной принцип такой же, как и для всех двигателей. Это взаимная индукция между обмоткой статора и ротора, которая делает любой двигатель работоспособным. Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.

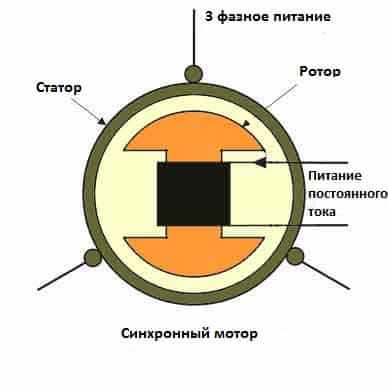
Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса в статоре и роторе. Как показано на рисунке, статор имеет два полюса Ns и S. Эти полюса, находясь под напряжением, создают вращающееся магнитное поле. Они вращаются с синхронной скоростью и позволяют считать направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, то полюса отталкиваются друг от друга. Итак, северный полюс в статоре отталкивает северный полюс ротора. Также южный полюс статора отталкивает юг ротора. Это заставляет ротор вращаться в направлении против часовой стрелки. Таким образом, через полпериода полюса статора меняются местами, что приводит их в положение противоположенных полюсов, которые притягивают друг друга . Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.
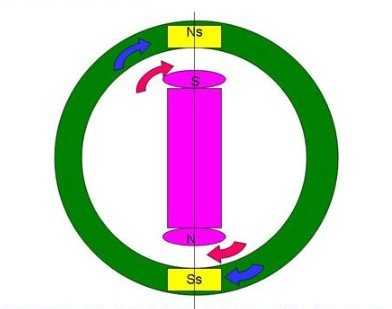
В этом положении полюсы Ns притягивают S, а полюсы Ss притягивают N. Эти противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает изменяться с быстрой скоростью и реверсированием, полюса ротора также вращаются и поворачиваются так же, как и статор, таким образом вызывая вращение ротора с постоянной, синхронной скоростью и в том же направлении.
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
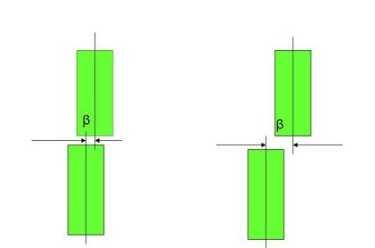
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».

Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Применение синхронных двигателей:
- Эти двигатели используются как первичные двигатели (приводы) для центробежных насосов, поршневых компрессоров с ременным приводом, воздуходувок, бумажных фабрик, резиновых фабрик и т.д. Из-за их высокой эффективности и высоких скоростей (об / мин выше 600).
- Низкоскоростные синхронные двигатели (об / мин ниже 600) широко используются для привода многих поршневых насосов. Таких как винтовые и шестеренные насосы, вакуумные насосы, дробилки, машины для прокатки алюминиевой фольги.
- Эти моторы также широко используются на борту судов. Навигационное оборудование корабля, такое как гирокомпас, использует специальный тип синхронного двигателя. Они также используются в качестве первичных двигателей для Viscometer. Это устройства для измерения / регулирования вязкости мазута главного двигателя.
- Большинство фабрик и производств используют бесконечное количество индуктивных нагрузок. Они могут варьироваться от ламповых ламп до мощных асинхронных двигателей. Таким образом, эти индуктивные нагрузки имеют значительный коэффициент мощности отставания. Синхронный двигатель с избыточным возбуждением (синхронный конденсатор), имеющий ведущий коэффициент мощности, используется для улучшения коэффициента мощности этих систем питания.
- Эти двигатели также используются для регулирования напряжения, когда происходит сильное падение / повышение напряжения. Так же когда тяжелая индуктивная нагрузка включается / выключается в конце длинных линий электропередачи.
- Синхронные двигатели могут работать на сверхнизких скоростях с помощью мощных электронных преобразователей, которые генерируют очень низкие частоты. Примерами этих двигателей являются диапазоны мощностью 10 МВт, используемые для привода дробилок, вращающихся печей и шаровых мельниц с регулируемой скоростью.
meanders.ru
Чем отличается синхронный двигатель от асинхронного
Двигатель является устройством, преобразующим энергию в механический тип работы. Только зная функции и технические характеристики мотора, можно правильно резюмировать, чем отличается синхронный двигатель от асинхронного вида устройства.
Принцип работы синхронных и асинхронных моторов
Функционирование синхронных электродвигателей базируется на взаимодействии полюсов статора и индуктора. В пусковой момент происходит ускорение мотора до показателей вращательной скорости магнитного потока. В таких условиях устройство действует в синхронном режиме, а магнитными полями образуется особое пересечение, в результате чего происходит синхронизация.

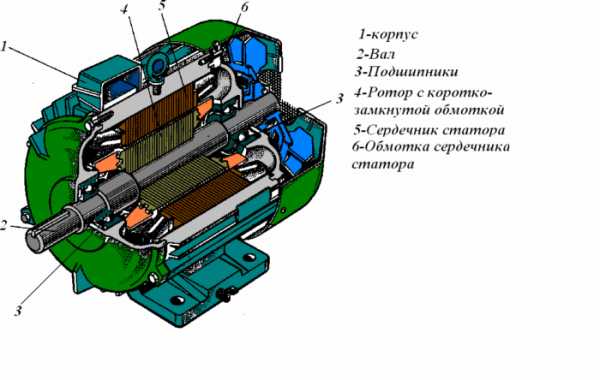
Синхронный двигатель в разрезе
Асинхронные моторы имеют частоту роторного вращения, отличную от частоты, с которой вращается магнитное поле, создаваемое в результате действия питающего напряжения. Такие двигатели не обладают автоматической регулировкой токового возбуждения.
Асинхронный двигатель в разрезе
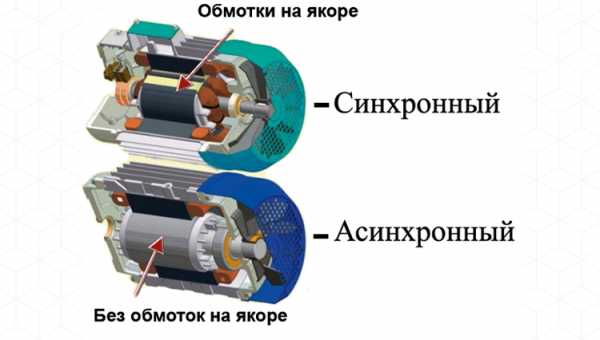
Основные отличия
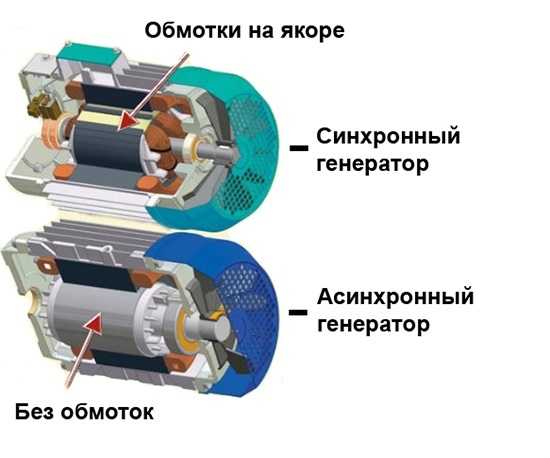
Наличие обмоток на якоре является одним из основных отличий между двумя типами двигателей
Несмотря на внешнее сходство, асинхронные двигатели и устройства синхронного типа имеют несколько принципиальных отличий:
- ротор асинхронных моторов не нуждается в токовом питании, а индукция полюсов зависит от магнитного поля статора;
- ротор в синхронном двигателе обладает обмоткой возбуждения в условиях независимого питания;
- обороты в асинхронном моторе под нагрузкой отстают по величине скольжения от вращений магнитного поля внутри статора;
- обороты в синхронных двигателях соответствуют частоте «оборотов» магнитного поля в статоре и постоянны в условиях разных нагрузок.
Статоры в двигателях асинхронного и синхронного типа характеризуются одинаковым устройством и создают вращающееся магнитное поле.
Синхронные двигатели способны работать с одновременным совмещением функций мотора и генератора.
Такие устройства относятся к категории современных двигателей, обладающих высоким КПД и постоянной частотой вращения. Асинхронные моторы сложнее регулировать, а их коэффициент полезного действия недостаточно высокий. Тем не менее, второй вариант более доступен по цене.
Оцените статью: Поделитесь с друзьями!vazweb.ru
Синхронные электродвигатели. Работа и применение. Особенности
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работы
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостатки
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателя
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Синхронные компенсаторы
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера применения
Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Похожие темы:
electrosam.ru
Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Чем отличается синхронный двигатель от асинхронного
Прежде чем разобраться, в чём их отличие, необходимо выяснить, что такое электродвигатель? Электродвигатель – это электрическая машина, которая приводится в действие от электроэнергии и служит приводом для других механизмов.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.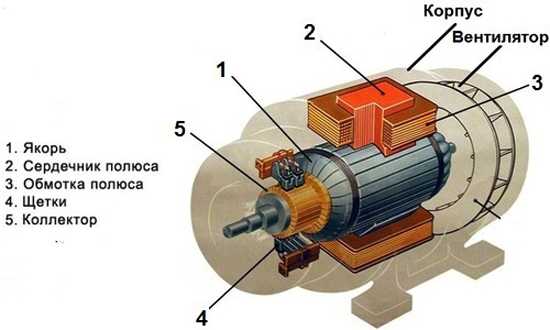
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток. А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.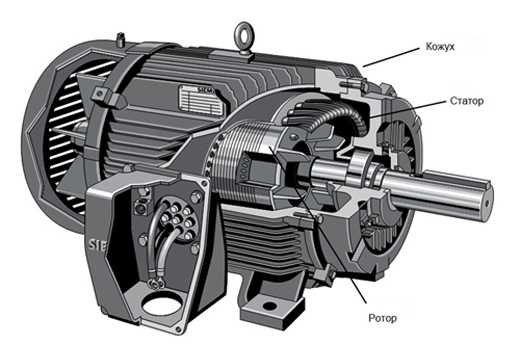
В чём же отличия синхронного и асинхронного электродвигателей?
Если поставить рядом два современных электродвигателя одного и другого типа, то по внешним признакам их отличить трудно даже специалисту.
По существу, их главное отличие рассмотрено в приведённых примерах принципов работы этих электродвигателей. Они отличаются по конструкции роторов. Ротор синхронного электродвигателя состоит из обмоток, а ротор асинхронного представляет собой набор пластин.
Статоры одного и другого электродвигателей почти неотличимы и представляют собой набор обмоток, однако, статор синхронного электродвигателя может быть набран из постоянных магнитов.
Обороты синхронного двигателя соответствуют частоте подаваемого на него тока, а обороты асинхронного несколько отстают от частоты тока.
Отличаются они и по сферам применения. Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Синхронные электродвигатели конструктивно сложней, а значит, и дороже асинхронных электродвигателей.
vchemraznica.ru
Принцип работы синхронного двигателя: видео — Asutpp
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети. Ниже дана формула синхронной скорости:
Ns = 120F/p
Строение синхронного двигателя
В принципе, его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока (в этом мы разберёмся позже). А пока рассмотрим основное строение данного типа двигателя.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
 Строение синхронного двигателя
Строение синхронного двигателяОсновные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Понравилась статья? Поделиться с друзьями:
www.asutpp.ru
Синхронные двигатели — принцип работы, конструкции
Все электродвигатели построены на одном и том же принципе взаимодействия магнитных полей. Катушка с сердечником из ферромагнитного материала оказывает заметное механическое воздействие на другую аналогичную катушку. Разноименные полюсы соленоидов притягиваются, а одноименные — отталкиваются.
Поэтому в двигателе должно быть пространственное перемещение полюсов магнитного поля, создаваемое одной его частью. А другая часть движка создает свои полюсы и откликается вращением на пространственное перемещение полюсов. Она может содержать как постоянные магниты, так и катушки с сердечником. Далее расскажем о том, как магнитные поля функционируют в синхронных двигателях, а также предоставим другую информацию об этих машинах.
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.
 Составные частит синхронных двигателей
Составные частит синхронных двигателейЧем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула
ФормулаВ результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.
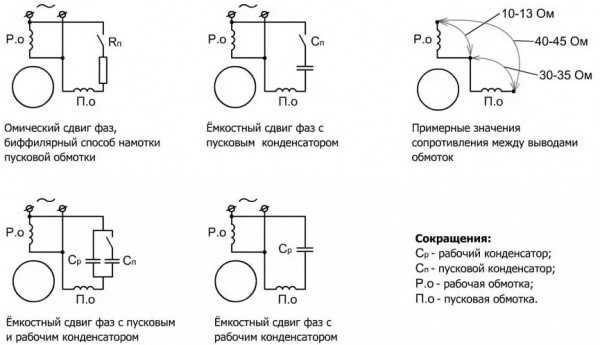 Варианты устройства синхронных двигателей
Варианты устройства синхронных двигателей Разновидности роторов
Разновидности роторов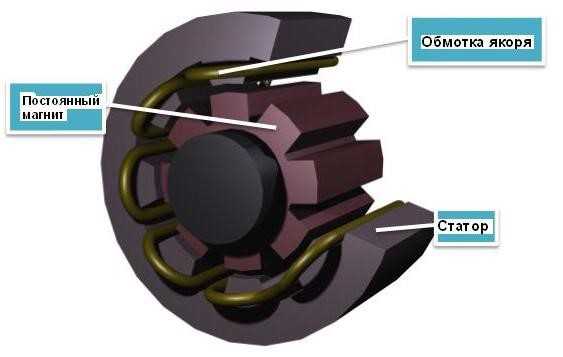 Принцип работы ротора
Принцип работы ротора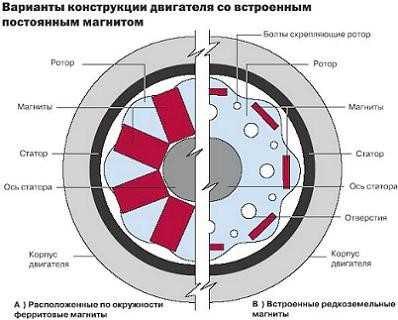 Один из вариантов конструкции двигателя
Один из вариантов конструкции двигателя Ротор с постоянными магнитами
Ротор с постоянными магнитами Гистерезисный движок
Гистерезисный движок
 Три разновидности конструкции ротора реактивного двигателя
Три разновидности конструкции ротора реактивного двигателя
Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.
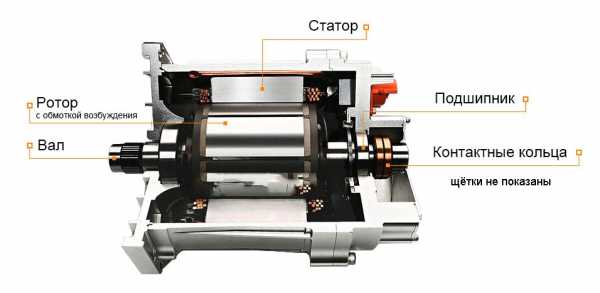 Классический движок с индуктором
Классический движок с индукторомТакое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.
 Движки-компенсаторы на подстанции
Движки-компенсаторы на подстанцииРазвитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Похожие статьи:domelectrik.ru