Беличья клетка. Конструкция асинхронного короткозамкнутого электродвигателя.
Асинхронные бесколлекторные двигатели нашли наиболее широкое распространение благодаря сравнительной простоте и надежности в эксплуатации. Коллекторные двигатели имеют ограниченное применение в установках, где требуется регулировать скорость приводимых механизмов в широких пределах. Однако они относительно тяжелы, дороги, имеют худшие рабочие характеристики по сравнению с бесколлекторными двигателями, а главное менее надежны в эксплуатации из-за тяжелых условий коммутации тока.
Асинхронные бесколлекторные машины имеют два основных исполнения: с короткозамкнутой обмоткой ротора и с фазной обмоткой ротора — с контактными кольцами. С точки зрения происходящих электромагнитных процессов в асинхронном двигателе можно выделить две наиболее важные части: неподвижный статор, обеспечивающий создание вращающегося магнитного поля, и вращающийся ротор, в котором создается электромагнитный момент, передаваемый приводимому механизму.
Рис. 1. Литая алюминиевая беличья клетка ротора короткозамкнутого асинхронного двигателя (с короткозамыкающим кольцом и вентиляционными лопатками)
Одной из наиболее распространенных роторных обмоток является короткозамкнутая, так называемая беличья клетка (внешне она. напоминает беличье колесо — рис. 1). Рабочие провода этой обмотки (стержни) укладываются в пазы ротора неизолированными, благодаря чему обеспечиваются хорошее использование площади паза и хорошая теплоотдача от стержней к активной стали.
Короткозамкнутые асинхронные двигатели по конструкции ротора имеют следующие модификации: с одиночной беличьей клеткой; глубокопазные; с двойной беличьей клеткой, или двухклеточные.
Рис. 2. Пазы и стержни обмоток ротора. а — одиночная беличья клетка; б— глубокий паз; в — двойная беличья клетка.
Асинхронные двигатели с одиночной беличьей клеткой на роторе имеют пазы, выштампованные в листовой стали, овальной или круглой формы (рис. 2,а). Сверху эти пазы перекрываются мостиком толщиной 0,4—0,5 мм и заливаются алюминием. С обоих торцов ротора располагаются алюминиевые кольца, которые замыкают все отлитые в пазах стержни. Такая литая единая беличья клетка часто дополнительно снабжается с обеих сторон ротора специальными алюминиевыми крыльями (см. рис. 1). Эти крылья устанавливаются для увеличения теплоотвода от короткозамкнутого ротора и для лучшей вентиляции внутри асинхронной машины.
 Стержни и кольца припаиваются друг к другу тугоплавкими припоями.
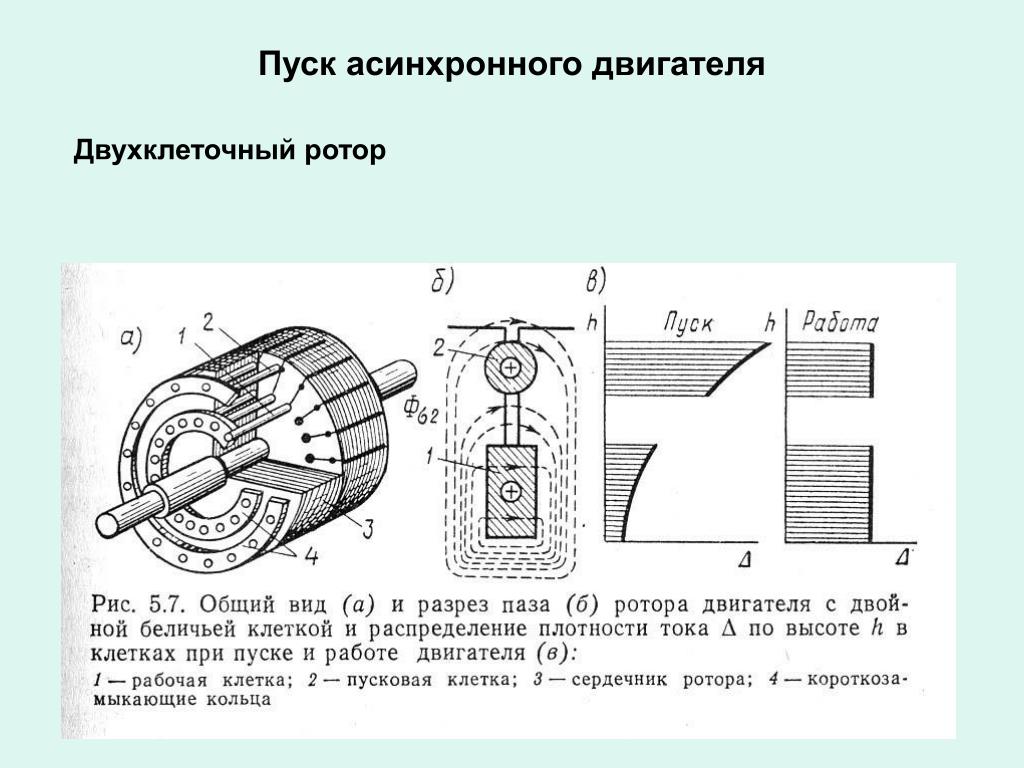
Стержни и кольца припаиваются друг к другу тугоплавкими припоями.Двухклеточный ротор (рис. 1,в) выполняется с двумя беличьими клетками. Внешняя обмотка изготавливается из латуни или специальной бронзы, благодаря чему обеспечиваются относительно большое ее активное сопротивление и сравнительно малое индуктивное. Эта обмотка выполняет функции пусковой в асинхронном двигателе. Другая обмотка ротора — внутренняя — изготавливается из меди с минимальным активным сопротивлением. Она выполняет функции основной рабочей обмотки двигателя. Обе обмотки имеют круглые пазы, однако внутренняя обмотка в ряде случаев выполняется прямоугольной или овальной формы. Короткозамыкающие торцевые кольца для обеих обмоток обычно изготавливаются из меди.
Существуют другие модификации пазов ротора (бутылочного профиля, трапецеидального профиля), однако описанные выше являются наиболее характерными для асинхронных двигателей.
В асинхронном двигателе частота вращения ротора, увлекаемого магнитным полем статора, меньше частоты вращения самого поля.
 В самом деле, в случае равенства этих частот прекратилось бы движение поля по отношению к ротору, так как в роторе перестала бы наводиться электродвижущая сила, создающая токи в его обмотках. При этом прекратилось бы взаимодействие ротора с вращающимся полем и устранилась бы причина вращения ротора. В таком случае ротор стал бы неминуемо проскальзывать, т. е. частота его вращения стала бы меньше, чем частота вращения магнитного поля, что и соответствует действительному положению в асинхронном двигателе. Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.
В самом деле, в случае равенства этих частот прекратилось бы движение поля по отношению к ротору, так как в роторе перестала бы наводиться электродвижущая сила, создающая токи в его обмотках. При этом прекратилось бы взаимодействие ротора с вращающимся полем и устранилась бы причина вращения ротора. В таком случае ротор стал бы неминуемо проскальзывать, т. е. частота его вращения стала бы меньше, чем частота вращения магнитного поля, что и соответствует действительному положению в асинхронном двигателе. Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.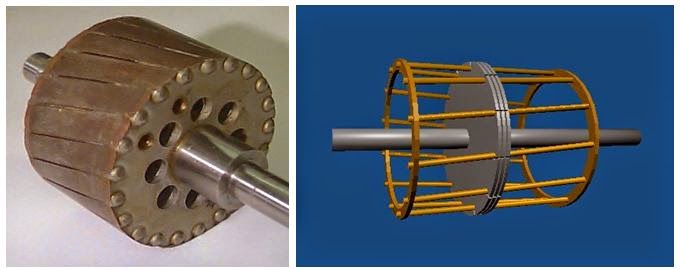 У асинхронной машины вторичная обмотка отделена от первичной воздушным зазором, чего нет в общепромышленных трансформаторах. Кроме того, вторичная обмотка двигателя вращается по отношению к первичной. Как было отмечено выше, частота вращения п, с которой вращается ротор, должна отличаться от частоты вращения магнитного поля п1. В зависимости от соотношения этих частот существуют три режима работы асинхронной машины: двигательный, генераторный, тормозной.
У асинхронной машины вторичная обмотка отделена от первичной воздушным зазором, чего нет в общепромышленных трансформаторах. Кроме того, вторичная обмотка двигателя вращается по отношению к первичной. Как было отмечено выше, частота вращения п, с которой вращается ротор, должна отличаться от частоты вращения магнитного поля п1. В зависимости от соотношения этих частот существуют три режима работы асинхронной машины: двигательный, генераторный, тормозной.При работе асинхронной машины в двигательном режиме частота вращения ротора изменяется в пределах 0п1), то асинхронная машина перейдет в генераторный режим. При этом направление вращения поля статора относительно ротора изменится на обратное по сравнению с работой машины в двигательном режиме. Электромагнитный момент на валу, развиваемый асинхронной машиной, становится тормозящим по отношению к двигателю, который приводит ее во вращение. Механическая энергия, передаваемая этим двигателем асинхронной машине, преобразуется в электрическую и отдается в сеть, к которой подключен ее статор.
Режим работы асинхронной машины, когда ротор приводится во вращение против направления вращения электромагнитного поля статора, получил название режима электромагнитного тормоза.
Использование синхронных и асинхронных двигателей. Синхронный и асинхронный двигатель
Трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.

- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.

Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке.Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора.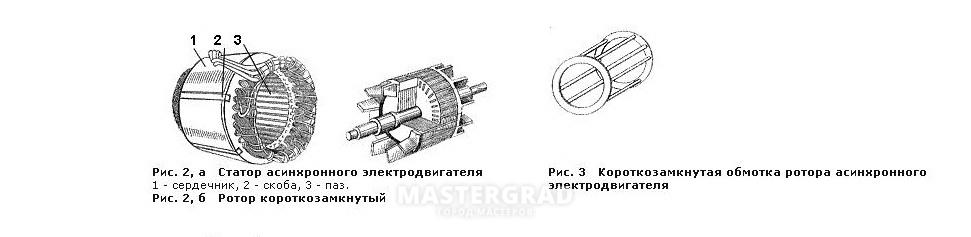
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником.

- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.

- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора.
 Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах. - Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
Трехфазные асинхронные двигатели составляют основу современного электропривода. От ДПТ их отличает простота конструкции, надежность, высокие технико-экономические показатели. В настоящее время частотные преобразователи позволили сделать регулировочные свойства АД более лучшими, чем у ДПТ с НВ.
По конструкции ротора АД разделяются на двигатели и короткозамкнутым ротором (КЗР) и двигатели с фазным ротором (ФР). Наиболее простая конструкция у АД с КЗР. Ротор такого двигателя не имеет выводов, так как его обмотка выполнена в виде короткозамкнутой клетки (беличья клетка). Его обмотка выполнена в виде ряда медных или алюминиевых стержней, расположенных по периметру сердечника ротора, замкнутые в двух сторон короткозамыкающими кольцами. Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Простота конструкции обеспечивает им высокую надежность, простоту обслуживания и невысокую стоимость. Схема включения АД СС КЗР представлена на рис. 4.1, а.
Фазный ротор имеет трехфазную обмотку, выполненную по типу обмотки статора (рис. 4.1, б). Одни концы катушек соединены в нулевую точку («звезда»), а другие – подключены к контактным кольцам. На кольца наложены щетки, осуществляющие скользящий контакт с обмоткой ротора. При такой конструкции возможно подсоединение к обмотке ротора пускового или регулировочного реостата, позволяющего менять электрическое сопротивление в цепи ротора. Такие двигатели более сложны в изготовлении и эксплуатации, поэтому применяются только там, где применение АД с КЗР не обеспечит требованиям в приводу механизма.
Ротор АД отстаёт от вращающегося магнитного поля статора, которое создается обмоткой статора, то есть вращение происходит асинхронно. В этих условиях вращающееся поле статора индуцирует ЭДС в обмотке роторе, под действием которого в роторе протекает ток, который взаимодействует с вращающимся магнитным полем (ВМП), создавая вращающий момент двигателя. В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
В рабочих режимах разница частот вращения статора и ротора не велика и составляет несколько процентов. При рассмотрение рабочих процессов АД обычно используют понятие скольжения
Скорость асинхронного двигателя в рабочих режимах
где синхронная частота вращения магнитного поля ; – частота питающего напряжения ; – число пар полюсов.
Статор синхронного двигателя (СД) конструктивно не отличается от статора АД. Ротор СД имеет явнополюсную конструкцию, на полюсах которого расположена обмотка возбуждения. При включении обмотки к источнику постоянного тока в двигателе создается дополнительное магнитное поле. Таким образом, для работы синхронного двигателя кроме 3х-фазного переменного напряжения требуется также постоянное. Исключение составляют двигатели, возбуждаемые постоянными магнитами. Такие двигатели обладают абсолютно жесткой механической характеристикой: ротор двигателя вращается синхронно с вращающимся магнитным полем с частотой .
В отличие от АД, синхронные не создают пускового момента, так как ротор двигателя по причине инерционности не может мгновенно разогнаться до синхронной скорости. Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Для пуска СД необходимо предварительно привести его во вращение до скорости, близкой к синхронной ( . С этой целью применяют асинхронный пуск, для чего на роторе двигателя располагается пусковая обмотка, конструктивно похожая на беличью клетку.
Процесс асинхронного пуска СД протекает следующим образом (рис. 4.2).
При включении обмотки статора СД в сеть СД запускается как асинхронный. При этом обмотку возбуждения замыкают на сопротивление для ограничения величины ЭДС, которая наводится в ОВ при пуске двигателя. При достижении скорости вращения близкой к номинальной, обмотку возбуждения подключают к постоянному напряжению, и двигатель втягивается в синхронизм, то есть скорость вращения двигателя становится равной синхронной скорости.
Синхронные двигатели изготавливаются на большие мощности: от сотен до тысяч киловатт. Объясняется это тем, что при меньших мощностях их применение нецелесообразно по технико-экономическим показателям.
СД обычно имеют целевое назначение, то есть каждая серия разработана для конкретных механизмов (для шаровых мельниц — СДМЗ, для привода компрессоров – СДК, для привода насосов – ВДС и др.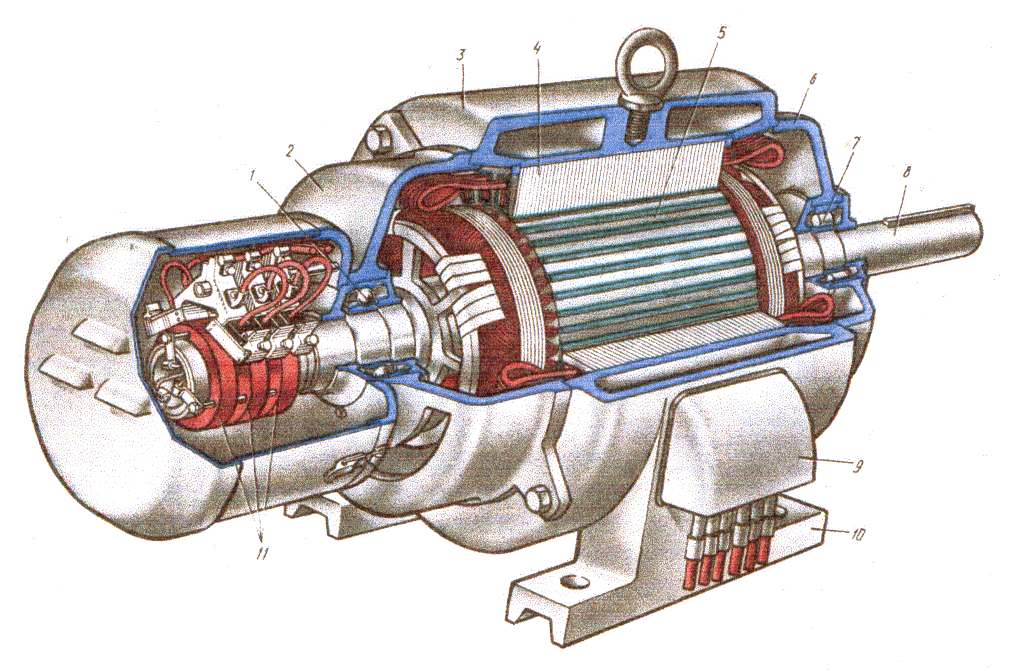 ).
).
Синхронные двигатели имеют перегрузочную способность .
Еще одной особенностью СД является возможность работать с величиной , более того, при перевозбуждении синхронный двигатель начинает генерировать емкостную нагрузку. Для повышении в сети используют синхронные компенсаторы, представляющие собой перевозбужденные СД специальной конструкции, работающие без нагрузки на валу.
В данной статье рассмотрим принципиальные отличия синхронных электродвигателей от асинхронных, чтобы каждый читающий эти строки мог бы эти различия четко понимать.
Более широко распространены сегодня, однако в некоторых ситуациях синхронные двигатели оказываются более подходящими, более эффективными для решения конкретных промышленных и производственных задач, об этом будет рассказано далее.
Прежде всего давайте вспомним, что же вообще такое электродвигатель. называется электрическая машина, предназначенная для преобразования электрической энергии в механическую энергию вращения ротора, и служащая в качестве привода для какого-нибудь механизма, например для приведения в действие подъемного крана или насоса.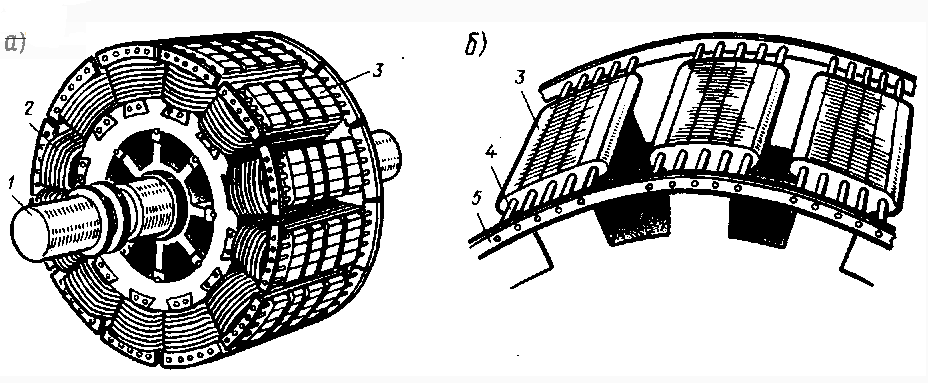
Еще в школе всем рассказывали и показывали, как два магнита отталкиваются одноименными полюсами, а разноименными — притягиваются. Это . Но существуют и переменные магниты. Каждый помнит рисунок с проводящей рамкой, расположенной между полюсами подковообразного постоянного магнита.
Горизонтально расположенная рамка, если по ней пустить постоянный ток, станет поворачиваться в магнитном поле постоянного магнита под действием пары сил (), пока не будет достигнуто равновесие в вертикальном положении.
Если затем по рамке пустить постоянный ток противоположного направления, то рамка повернется дальше. В результате такого попеременного питания рамки постоянным током то одного, то другого направления, достигается непрерывное вращение рамки. Рамка здесь представляет собой аналог переменного магнита.
Приведенный пример с вращающейся рамкой в простейшей форме демонстрирует принцип работы синхронного электродвигателя. У любого синхронного электродвигателя на роторе есть обмотки возбуждения, на которые подается постоянный ток, формирующий магнитное поле ротора. Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
Статор же синхронного электродвигателя содержит обмотку статора, для формирования магнитного поля статора.
При подаче на обмотку статора переменного тока, ротор придет во вращение с частотой, соответствующей частоте тока в обмотке статора. Частота вращения ротора будет синхронна частоте тока обмотки статора, поэтому такой электродвигатель называется синхронным. Магнитное поле ротора создается током, а не индуцируется полем статора, поэтому синхронный двигатель способен держать синхронные номинальные обороты независимо от мощности нагрузки, разумеется, в разумных пределах.
Асинхронный электродвигатель в свою очередь отличается от синхронного. Если вспомнить рисунок в рамкой, и рамку просто накоротко замкнуть, то при вращении магнита вокруг рамки, индуцируемый в рамке ток создаст магнитное поле рамки, и рамка будет стремиться догнать магнит.
Частота вращения рамки под механической нагрузкой будет всегда меньше частоты вращения магнита, и частота не будет поэтому синхронной. Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
Этот простой пример демонстрирует принцип действия асинхронного электродвигателя.
В асинхронном электродвигателе вращающееся магнитное поле формируется переменным током обмотки статора, расположенной в его пазах. Ротор типичного асинхронного двигателя обмоток как таковых не имеет, вместо этого на нем расположены накоротко соединенные стержни (ротор типа «беличья клетка»), такой ротор называется короткозамкнутым ротором. Бывают еще асинхронные двигатели с фазным ротором, там ротор содержит обмотки, сопротивление и ток в которых можно регулировать реостатом.
Итак, в чем же принципиальное отличие асинхронного электродвигателя от синхронного? С виду внешне они похожи, порой даже специалист не отличит по внешним признакам синхронный электродвигатель от асинхронного. Главное же отличие заключается в устройстве роторов. Ротор асинхронного электродвигателя не питается током, а полюса на нем индуцирутся магнитным полем статора.
Ротор синхронного двигателя имеет обмотку возбуждения с независимым питанием. Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Статоры синхронного и асинхронного двигателя устроены одинаково, функция в каждом случае одна и та же — создание вращающегося магнитного поля статора.
Обороты асинхронного двигателя под нагрузкой всегда на величину скольжения отстают от вращения магнитного поля статора, в то время как обороты синхронного двигателя равны по частоте «оборотам» магнитного поля статора, поэтому если обороты должны быть постоянными при различных нагрузках, предпочтительней выбирать синхронный двигатель, например в приводе гильотинных ножниц лучше всего справится со своей задачей мощный синхронный двигатель.
Область применения асинхронных двигателей сегодня очень широка. Это всевозможные станки, транспортеры, вентиляторы, насосы, — все то оборудование, где нагрузка сравнительно стабильна, или снижение оборотов под нагрузкой не критично для рабочего процесса.
Некоторые компрессоры и насосы требуют постоянной частоты вращения при любой нагрузке, на такое оборудование ставят синхронные электродвигатели.
Синхронные двигатели дороже в производстве, чем асинхронные, поэтому если есть возможность выбора и небольшое снижение оборотов под нагрузкой не критично, приобретают асинхронный двигатель.
Синхронные электродвигатели широко применяются в электроприводах, не требующих регулирования частоты вращения. По сравнению с асинхронными двигателями они имеют ряд преимуществ:
более высокий коэффициент полезного действия;
возможность изготовления двигателей с низкой частотой вращения, что позволяет отказаться от промежуточных передач между двигателем и рабочей машиной;
частота вращения двигателя не зависит от нагрузки па его валу;
возможность использования в качестве компенсирующих устройств реактивной мощности.
Синхронные электродвигатели могут являться потребителями и генераторами . Характер и значение реактивной мощности синхронного двигателя зависят от величины тока в обмотке возбуждения. Зависимость тока в обмотке, выдающей напряжение в электрическую сеть, от тока возбуждения носит название U-образной характеристики синхронного двигателя. При 100%-ной нагрузке на валу двигателя его равен 1. При этом электродвигатель не потребляет реактивной мощности из электрической сети. Ток в обмотке статора при этом имеет минимальное значение.
На рис.7.7 приведены характеристики синхронных двигателей СДВ 17-39-12 и СДВ-17-59-12 (С – синхронный, Д – двигатель, В – для привода вентиляторов, 17 – габарит, 39 и 59 – длина сердечника статора, см, 12 – число полюсов) и ВДС 325/49-16. Характеристики синхронных двигателей (рис.7.7) имеют ряд преимуществ по сравнению с характеристиками , :
возможность работы с опережающим коэффициентом мощности;
более низкие потери;
синхронная вращения в независимости от нагрузки;
возможность плавного регулирования реактивной мощности и более высокое качество в узлах нагрузки;
способность сохранять устойчивую работу при колебаниях в питающей сети.
Последняя особенность связана с тем, что у синхронного двигателя максимальный момент пропорционален напряжению, а у АД – квадрату – рис.7.4.
Синхронные двигатели, наряду с наличием на роторе обмотки возбуждения, имеют и мощную демпферную систему, обеспечивающую пуск и разгон ротора до подсинхронной частоты вращения в асинхронном режиме, с замкнутой на гасительное сопротивление обмоткой возбуждения. По достижении подсинхронной частоты вращения осуществляется синхронизация двигателя путем включения АГП и доведение его частоты вращения до синхронной. Синхронизация усложняется при высоких коэффициентах загрузки двигателя, а в системе собственных нужд электростанций возможности разгрузки на период синхронизации отсутствуют – рис.7.7.
Недостатком синхронных электродвигателей является необходимость отключения АГП и перевод их в асинхронный режим даже при кратковременных глубоких понижениях питающего напряжения, связанных с неудаленными и ошибочным отключением рабочих вводов питания. При использовании синхронных двигателей на электростанциях они будут участвовать в самозапуске наряду с другими асинхронными двигателями в условиях более низких питающих напряжений по сравнению с пуском отдельного . При этом условия синхронизации усложняются.
Исходя из высокой чувствительности синхронных электродвигателей к глубоким понижениям напряжения, трудности синхронизации в условиях самозапуска, отсутствие необходимости компенсации реактивной мощности в системе СН ввиду небольшой удаленности синхронных генераторов, синхронные электродвигатели нашли ограниченное применение в системе СН электростанций. Синхронные электродвигатели используются для питания потребителей, не влияющих на немедленное прекращение технологического процесса: часть циркуляционных насосов, приводы компрессоров и вентиляторов, мельниц, дробилок. Перечисленные механизмы обычно имеют промежуточные бункеры топлива и запасы перекачиваемого рабочего тела в ресиверах.
В виде примера в табл.7.2 изображена мельница-вентилятор с приводным синхронным двигателем марки СДМЗ2-22-61-40УХЛ4, предназначенным для привода шаровых и стержневых мельниц. В обозначении типа:
С – синхронный, Д – двигатель, М – для привода мельниц, З – закрытого исполнения, 2 – вторая серия, 22 – габарит, 61 – длина сердечника статора, см, 40 – число полюсов, УХЛ4 – климатическое исполнение и категория размещения по ГОСТ. Пуск двигателя асинхронный прямой при номинальном напряжении сети с включением в цепь обмотки возбуждения разрядного сопротивления. В процессе пуска среднее на зажимах двигателя должно быть не менее 0,85Uном, минимальное в начале пуска – не менее 0,8Uном. Двигатель допускает два пуска подряд из холодного состояния или один пуск из горячего состояния при условии, что средний статический момент сопротивления механизма на валу за время пуска не превышает 0,8М ном при моменте инерции приводимого механизма не более указанного в табл.7.2. Возбуждение двигателя осуществляется от тиристорных возбудителей. Обращаем внимание на низкую частоту вращения электродвигателей серии СДМЗ2 в пределах 100 – 150 об/мин, на которые асинхронные двигатели не выпускаются.
Прежде чем разобраться, в чём их отличие, необходимо выяснить, что такое электродвигатель? Электродвигатель – это электрическая машина, которая приводится в действие от электроэнергии и служит приводом для других механизмов.
Объяснение принципа работы синхронного электродвигателя для «чайников»
С детства мы помним, что два магнита, если их приблизить друг к другу, в одном случае притягиваются, а в другом отталкиваются. Происходит это, в зависимости от того, что какими сторонами магнитов мы их соединяем, разноимённые полюса притягиваются, а одноимённые отталкиваются. Это – постоянные магниты, у которых магнитное поле присутствует постоянно. Существуют и переменные магниты.
В школьном учебнике по физике есть рисунок, где изображён электромагнит в виде подковы и рамка с полукольцами на концах, которая расположена между его полюсами.
При расположении рамки в горизонтальном положении в пространстве между полюсами магнитов, из-за того, что магнит притягивает разноимённые полюса и отталкивает одноимённые, на рамку подаётся ток, одинакового знака. Вокруг рамки появляется электромагнитное поле (вот пример переменного магнита!), полюса магнитов притягивают рамку, и она поворачивается в вертикальное положение. При достижении вертикали, на рамку подаётся ток противоположного знака, электромагнитное поле рамки меняет полюсность, и полюса постоянного магнита начинают отталкивать рамку, вращая её до горизонтального положения, после чего цикл вращения повторяется.
В этом заключается принцип работы электродвигателя. Причём, примитивного синхронного электродвигателя!
Итак, примитивный синхронный электродвигатель работает, когда на рамку подаётся ток. У настоящего синхронного электродвигателя, роль рамки выполняет ротор с катушками проводов, называемых обмотками, на которые подаётся ток (они служат источниками электромагнитного поля). А роль подковообразного магнита выполняет статор, изготовленный либо из набора постоянных магнитов, либо тоже из катушек проводов (обмоток), которые, при подаче тока являются также источниками электромагнитного поля.
Ротор синхронного электродвигателя будет вращаться с такой же частотой, с какой меняется ток, подаваемый на клеммы обмотки, т.е. синхронно. Отсюда название этого электродвигателя.
Объяснение принципа работы асинхронного электродвигателя для «чайников»
Вспоминаем описание рисунка в предыдущем примере. Та же рамка, расположенная между полюсами подковообразного магнита, только её концы не имеют полуколец, они соединены между собой.
Теперь начинаем вращать вокруг рамки подковообразный магнит. Вращаем его медленно и наблюдаем за поведением рамки. До некоторых пор рамка остаётся неподвижной, а потом, при повороте магнита на определённый угол, рамка начинает вращение вслед за магнитом. Вращение рамки запаздывает по сравнению со скоростью вращения магнита, т.е. она вращается не синхронно с ним – асинхронно. Вот и получается, что это примитивный асинхронный электродвигатель.
Вообще-то роль магнитов в настоящем асинхронном двигателе служат обмотки, расположенные в пазах статора, на которые подаётся ток. А роль рамки, выполняет ротор, в пазы которого вставлены металлические пластины, соединённые между собой на коротко. Поэтому такой ротор называется короткозамкнутым.
В чём же отличия синхронного и асинхронного электродвигателей?
Если поставить рядом два современных электродвигателя одного и другого типа, то по внешним признакам их отличить трудно даже специалисту.
По существу, их главное отличие рассмотрено в приведённых примерах принципов работы этих электродвигателей. Они отличаются по конструкции роторов . Ротор синхронного электродвигателя состоит из обмоток, а ротор асинхронного представляет собой набор пластин.
Статоры одного и другого электродвигателей почти неотличимы и представляют собой набор обмоток, однако, статор синхронного электродвигателя может быть набран из постоянных магнитов.
Обороты синхронного двигателя соответствуют частоте подаваемого на него тока, а обороты асинхронного несколько отстают от частоты тока.
Отличаются они и по сферам применения . Например, синхронные электродвигатели ставят для привода оборудования, которое работает с постоянной скоростью вращения (насосы, компрессоры и т.д.) не снижая её с увеличением нагрузки. А вот асинхронные электродвигатели снижают частоту вращения при увеличении нагрузки.
Синхронные электродвигатели конструктивно сложней, а значит, и дороже асинхронных электродвигателей.
Типы и виды асинхронных электродвигателей | RuAut
Асинхронные электродвигатели являются наиболее распространенными электрическими машинами переменного тока. Их работа основана на использовании вращающегося магнитного поля. Пакет статора, для уменьшения потерь на вихревые токи, набран из отдельных листов электротехнической стали. В пазах статора расположены обмотки. Переменный ток одной обмотки создает пульсирующее магнитное поле, изображаемое вектором электромагнитной индукции. Если расположить вторую обмотку перпендикулярно первой и осуществить сдвиг фазы тока в обмотках на четверть периода, то такое расположение обмоток и такой сдвиг фаз создадут круговое вращение суммарного магнитного поля в статоре двухфазного двигателя.
В статоре простейшего трехфазного асинхронного электродвигателя три обмотки расположены под углом 120 градусов. Сдвиг фаз переменных токов в этих обмотках на треть периода, также создает вращение суммарного вектора магнитной индукции.
Продемонстрировать это можно на лабораторном эксперименте. Переменное магнитное поле возбуждает в стальном шарике вихревые токи. Взаимодействие этих токов с магнитным полем статора приводит шарик в движение по окружности статора. В электрическом двигателе подвижная часть является ротором, пакет которого также набран из отдельных изолированных листов электротехнической стали. Двигатели, в которых скорость вращения ротора никогда не достигает скорости вращения магнитного поля статора, называются асинхронные.
В асинхронных электродвигателях малой и средней мощности применяются короткозамкнутые роторы, типа беличья клетка. В современных электродвигателях беличья клетка обычно изготовляется заливкой пазов ротора расплавленным алюминием. При этом одновременно отливаются и вентиляционные лопасти. Некоторые асинхронные электродвигатели средней и большой мощности имеют фазный ротор. Концы трехфазной обмотки расположенные в его пазах, соединены с контактными кольцами. Это используется при пуске или регулировании скорости вращения электродвигателя.
Очень часто электропривод различных механизмов содержат встроенные электродвигатели, статор и ротор которых одновременно являются деталями конструкции. Например, диск пилы насажен на вал ротора, фреза фрезерного станка является продолжением вала ротора. В электродвигателях обращенной конструкции ротор располагается снаружи и одновременно является барабаном, на котором, например, располагаются ножи рубанка.
В вычислительной технике, системах автоматизации и в быту широко применяются двухфазные и однофазные асинхронные электродвигатели. Известно, что две взаимно перпендикулярные обмотки статора, подключенные к сети параллельно, создают неподвижное в пространстве пульсирующее, а не вращающееся магнитное поле. Если в цепь одной из обмоток включить фазосмещающее устройство, например конденсатор, произойдет сдвиг фаз тока в обмотках. Образуется эллиптическое вращающееся магнитное поле. Такие электродвигатели называются конденсаторными.
Наиболее прост по конструкции электродвигатель с расщепленным полюсом. Ротор такого электродвигателя короткозамкнутый, а статор имеет явно выраженные полюсы. Каждый полюс расщеплен пазом на две части. На одной из частей каждого полюса надето медное короткозамкнутое кольцо. Электромагнитное поле кольца, взаимодействуя с полем основной обмотки, создает сдвиг фаз магнитного потока. Такая конструкция обеспечивает образование магнитного поля вращающегося в сторону короткозамкнутого кольца.
В автоматических устройствах применяются различного рода асинхронные исполнительные электродвигатели. Они, как правило, двухфазные с регулируемой скоростью вращения ротора. Весьма распространенным управляемым электродвигателем является асинхронный электродвигатель с полым немагнитным ротором. Ротор такого электродвигателя представляет собой тонкостенный медный или дюралевый стакан. А статор состоит из наружной и внутренней частей, которые набираются из листов пермаллоя. Обмотка статора располагается в пазах наружной или внутренней его частей.
Можно встретить самые разнообразные асинхронные электродвигатели мощностью от долей ватта до тысяч киловатт. Простота и надежность обеспечили асинхронным электродвигателям широкое распространение в различных отраслях промышленности и техники.
Асинхронный двигатель синхронная и номинальная скорость отличия. Конструкционные отличия синхронного и асинхронного двигателя. Особенности синхронных моделей
Трёхфазные машины переменного тока. Они есть двух видов — асинхронные и синхронные. В этой статье рассказывается в чём сходство и различие между машинами обоих типов и область их применения.
Принцип действия и устройство электромашин разных типов
Асинхронные и синхронные электродвигатели похожи по конструкции, но есть и отличия.Устройство и принцип действия асинхронных электродвигателей
Это самые распространённые машины переменного тока. Такие электродвигатели состоят из трёх основных частей:
- Корпус с подшипниковыми щитами и лапами или фланцем.
- В корпусе находятся магнитопровод из железных пластин с обмотками. Этот магнитопровод носит название статор.
- Вал с подшипниками и магнитпроводом. Эта конструкция называется ротор . В электродвигателях с короткозамкнутым ротором в магнитопроводе находятся соединённые между собой алюминиевые стержни, эта конструкция носит название «беличья клетка». В машинах с фазным ротором вместо стержней намотаны обмотки.
В пазах статора со сдвигом 120° намотаны три обмотки. При подключении к трёхфазной сети в статоре наводится вращающееся магнитное поле. Скорость вращения называется «синхронная скорость».
Справка! В однофазных электродвигателях вращающееся поле создаётся дополнительной обмоткой или конструктивными особенностями статора.
Это поле наводит ЭДС в роторе, возникающий при этом ток создаёт своё поле, взаимодействующее с полем статора и приводящее его в движение. Скорость вращения ротора меньше синхронной скорости. Эта разница называется скольжение.
Рассчитывается скольжение по формуле S=(n1-n2)/n1*100%, где: · n1 — синхронная скорость; · n2 — скорость вращения ротора.
Номинальная величи
на скольжения в обычных электромоторах 1-8%. При увеличении нагрузки на валу двигателя скольжение и вращающий момент растут до критической величины, при достижении которой двигатель останавливается.
В электродвигателях с фазным ротором вместо беличьей клетки в пазах ротора намотаны три обмотки. Через токосъёмные кольца и щётки они подключаются к добавочным сопротивлениям. Эти сопротивления ограничивают ток и магнитное поле в роторе. Это увеличивает скольжение и уменьшает скорость двигателя.
Такие аппараты используются при тяжёлом пуске и в устройствах с регулировкой скорости, например, в мостовых кранах.
Принцип действия синхронных электродвигателей
Эти двигатели устроены сложнее и дороже асинхронных машин. Их достоинство в постоянной скорости вращения, не меняющейся при нагрузке.Статор синхронной машины не отличается от асинхронной. Отличие в роторе. В отличие от асинхронного двигателя, вращение осуществляется за счёт взаимодействия вращающегося магнитного поля статора и постоянного поля ротора. Для его создания в роторе находятся электромагниты. Напряжение к катушкам подводится при помощи токосъёмных колец и графитных щёток.
Справка! В роторе синхронных машин малой мощности вместо электромагнитов установлены постоянные или просто магнитопровод имеет явновыраженные полюса. Скольжение, как в асинхронных машинах, отсутствует, и частота вращения определяется только частотой питающего напряжения.
Запуск электродвигателей
Асинхронные электрические машины мощностью до 30-50кВт запускаются прямой подачей электроэнергии. С двигателями большой мощности и синхронными машинами дело обстоит сложнее.
Пуск асинхронных двигателей большой мощности
Для запуска таких машин используются разные способы:
- Включение добавочных сопротивлений в цепь статора. Они ограничивают пусковой ток, а после разгона закорачиваются пускателем.
- В аппаратах, предназначенных для работы в сети с фазным напряжением 660 вольт обмотки в сети 380 вольт соединены треугольником. На время пуска они переключаются в звезду.
- В электромашинах с фазным ротором для запуска в цепь ротора включаются добавочные сопротивления. После разгона они закорачиваются.
- При наличии регулировки скорости, переключением обмоток или изменением частоты, двигатель включается на минимальные обороты. После начала вращения, обороты увеличиваются.
Пуск синхронных электромашин
В отличие от асинхронных машин, пуск которых производится взаимодействием поля статора и обмоток или беличьей клетки ротора, синхронную машину необходимо предварительно разогнать до скорости, близкой к синхронной.
- С помощью дополнительного асинхронного двигателя. Так запускаются машины с постоянными магнитами в роторе. При достижении скорости, близкой к синхронной, асинхронхронник отключается и подаётся напряжение в статор синхронного двигателя.
- Асинхронный пуск. В роторе, кроме электромагнита, находится «беличья клетка». С её помощью аппарат разгоняется, после чего в обмотку подаётся постоянное напряжение, и двигатель начинает работать в качестве синхронного.
- Обмотки ротора закорачиваются напрямую или через добавочное сопротивление. После разгона в них подаётся постоянное напряжение.
- При помощи ТПЧ (тиристорного преобразователя частоты) частота питающего напряжения и скорость вращения плавно поднимается до номинальной. Этот способ применяется в механизмах с регулировкой скорости.
Особенности и применение разных видов электродвигателей
У каждого типа двигателей есть достоинства и недостатки по сравнению с другими. Это определяет область их применения. Применение разных типов электромашин зависит от их особенностей конструкции и принципа действия.
Достоинства и использование асинхронных электродвигателей
Такие машины имеют достоинства перед синхронными аппаратами:
- простота конструкции и низкая цена; аппараты с фазным ротором позволяют регулировать скорость вращения и осуществлять плавный пуск без использования преобразователей частоты;
- большое разнообразие мощностей — от нескольких ватт до десятков киловатт.
Кроме достоинств есть недостатки:
- падение скорости вращения при росте нагрузки;
- более низкий КПД и большие габариты, чем у синхронных аппаратов той же мощности;
- кроме активной, такие аппараты потребляют реактивную (индуктивную) мощность, что ведёт к необходимости устанавливать компенсаторы или дополнительно оплачивать реактивную электроэнергию.
Используются такие машины практически везде, где необходимо приведение в движение механизма и есть трёхфазное напряжение 380 вольт.
Применение синхронных машин
- Регулировка путём изменения тока возбуждения cos φ. Это позволяет уменьшить ток потребления, габариты и сечение подводящего кабеля, а также увеличить КПД. Кроме того, такие аппараты используются в качестве компенсаторов реактивной мощности.
- Менее чувствительны к колебаниям напряжения и обладают большей перегрузочной способностью, особенно к ударным нагрузкам. Способность к превышению мощности повышается путём перевозбуждения обмоток ротора. Благодаря этому такие двигатели используются в экскаваторах, гильотинных ножницах и других подобных механизмах.
- Частота вращения не меняется при изменения нагрузки. Поэтому синхронные машины применяются в прецизионных станках в металлургии, машиностроении и деревообатывающей промышленности.
Электродвигатели можно разделить на две основные категории – синхронные и асинхронные (индукционные) двигатели. Эти два вида довольно сильно отличаются друг от друга. Разница уже видна в самих названиях. Отличить агрегаты можно по выбитому на шильдике количеству оборотов (если там не указан тип мотора), у ассинхронного мотора неокруглённое число (например, 950 об/мин), у синхронного округлённое (1000 об/мин).
Есть и другие важные различия, в этой статье мы рассмотрим наиболее показательные из них: конструктивные, рабочие и ценовые.
Любой двигатель состоит из двух элементов: неподвижного и вращающегося. Статор имеет осевые прорези — пазы, на дно которых укладываются токонесущие медные или алюминиевые проводки. У электродвигателя на валу крепится ротор с обмоткой возбуждения.
Принципиальным отличием между синхронными и асинхронными двигателями являются роторы, точнее, их исполнение.
У синхронных моделей при малых мощностях они представляют собой постоянные магниты.
Переменное напряжение подаётся на обмотку статора, ротор подключается к постоянному источнику питания. Проходящий по обмотке возбуждения постоянный ток наводит магнитное поле статора. Крутящий момент создаётся из-за угла запаздывания между полями. Ротор имеет такую же скорость, как и магнитное поле статора.
Агрегаты используются на практике и как генераторы и как двигатели.
Асинхронные модели – это достаточно недорогие двигатели, которые применяются часто и всюду. Они проще в конструктивном плане, несмотря на то, что неподвижные части в принципе у всех моторов похожи.
По обмотке статора пропускается переменный электроток, который взаимодействует с роторной обмоткой. Два поля вращаются с одинаковой скоростью в одном направлении, но не могут быть равными, иначе бы не создавалась индуцированная ЭДС и, тем более крутящийся момент. Это становится причиной возникновения индуцированного тока в обмотке роторе, направление которого согласно правилу Ленца таково, что он склонен противостоять причине своего производства, т. е. скорости скольжения.
Скорость вращения ротора не совпадает со скоростью магнитного поля, она всегда меньше. Таким образом, ротор пытается догнать скорость вращающегося магнитного поля и уменьшить относительную скорость.
Основные достоинства и недостатки
- Асинхронные агрегаты не требуют какого-либо дополнительного источника питания. Синхронным необходим дополнительный источник постоянного тока для подачи напряжения на обмотки.
- Синхронники обладают относительно невысокой чувствительностью к перепадам сетевого напряжения и стабильностью вращения вне зависимости от нагрузки.
- Индукционные двигатели не требуют наличия контактных колец, за исключением двигателей с фазным ротором, которые их имеют для плавного пуска или регулирования скорости. В синхронных двигателях больше уязвимых мест, так как используются контактные кольца со щетками. Следовательно, детали быстрее изнашиваются и контакт между ними ослабевает.
- Синхронники нуждаются во вспомогательных пусковых механизмах, так как не обладают функцией самопуска. Для индукционных электродвигателей, имеющих собственные пусковые моменты, такой механизм не требуется.
Какой агрегат лучше
В заключение нужно отметить, что говорить, якобы один мотор лучше другого, нельзя. Однако, асинхронные модели надежнее в эксплуатации, отличаются простотой конструкции. Если агрегаты не перегружать, то их длительным сроком службы пользователь может остаться довольным.
Электродвигатели — машины, превращающие энергию электричества в механическую. Преобразованная энергия приводит во вращательное движение ротор двигателя, передающий вращение через трансмиссию непосредственно на вал исполнительного механизма. Основными типами электродвигателей являются синхронный и асинхронный двигатели. Различия между ними определяют возможности использования в различных устройствах и технологических процессах.
Принципы работы
Все электродвигатели имеют неподвижный статор и вращающийся ротор. Разница между асинхронным и синхронным двигателями состоит в принципах создания полюсов. В асинхронном электродвигателе они создаются явлением индукции. Во всех других электродвигателях используются постоянные магниты или катушки с током, создающие магнитное поле.
Особенности синхронных двигателей
Ведущие агрегаты синхронной машины — якорь и индуктор . Якорем является статор, а индуктор располагается на роторе. Под действием переменного тока в якоре образуется вращающееся магнитное поле. Оно сцепляется с магнитным полем индуктора, образованным полюсами постоянных магнитов или катушек с постоянным током. В результате этого взаимодействия энергия электричества преобразуется в кинетическую энергию вращения.
Ротор синхронной машины имеет частоту вращения такую же, как у поля статора. Достоинства синхронных электродвигателей:
- Конструктивно используется и как двигатель, и как генератор.
- Частота вращения, не зависящая от нагрузки.
- Большой коэффициент полезного действия.
- Малая трудоёмкость в ремонте и обслуживании.
- Высокая степень надёжности.
Синхронные машины широко используются как электродвигатели большой мощности для небольшой скорости вращения и постоянной нагрузки. Генераторы применяются там, где требуется автономный источник питания.
Имеются у синхронной машины и недостатки:
- Требуется источник постоянного тока для питания индуктора.
- Отсутствует начальный пусковой момент, для запуска требуется применение внешнего момента или асинхронного пуска.
- Щётки и коллекторы быстро выходят из строя.
Современные синхронные агрегаты содержат в индукторе дополнительно к обмотке, питаемой постоянным током, ещё и пусковую короткозамкнутую обмотку, которая предназначена для пуска в асинхронном режиме.
Отличительные черты асинхронных двигателей
Вращающееся магнитное поле статора асинхронного двигателя наводит индукционные токи в роторе, которые образуют собственное магнитное поле. Взаимодействие полей приводит ротор во вращение. Частота вращения ротора при этом отстаёт от частоты вращения магнитного поля. Именно это свойство отражено в названии двигателя.
Асинхронные электродвигатели бывают двух типов: с короткозамкнутым и с фазным ротором.
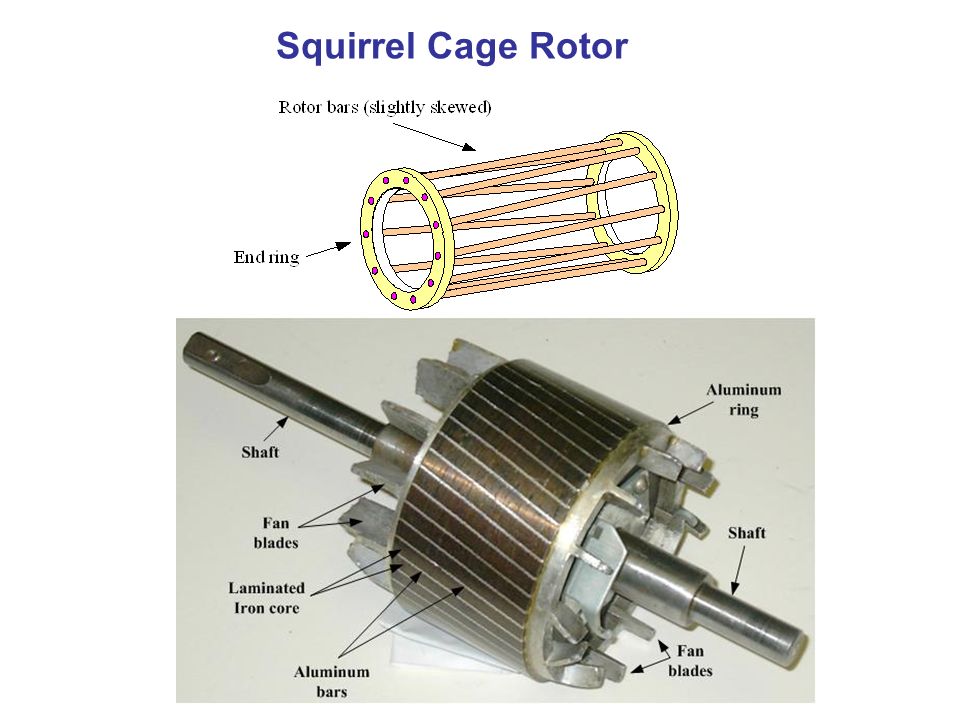
Бытовые приборы, такие как вентилятор или пылесос, обычно снабжены двигателями с короткозамкнутым ротором, который представляет собой «беличье колесо». Все стержни замыкаются приваренными с обеих сторон дисками. Взаимодействие магнитного поля статора с наведёнными токами в роторе образовывает электромагнитную силу, которая действует на ротор в направлении вращения поля статора. Крутящий момент на валу электродвигателя создаётся всеми электромагнитными силами от каждого проводника.
В электродвигателе с фазным ротором применяется тот же статор, что и для мотора с короткозамкнутым ротором. А в ротор добавляются обмотки трёх фаз, соединённые в «звезду». К ним можно при пуске двигателя подключать реостаты, регулирующие пусковые токи. С помощью реостатов можно регулировать и частоту вращения двигателя.
Достоинствами асинхронных двигателей можно назвать:
- Питание непосредственно от сетей переменного тока.
- Простоту устройства и сравнительно невысокую стоимость.
- Возможность использования в бытовых приборах с применением однофазного подключения.
- Низкое потребление энергии и экономичность.
Серьёзные недостатки — сложная регулировка частоты вращения и большие теплопотери. Для предотвращения перегрева корпус агрегата делается ребристым, и на вал электродвигателя устанавливается крыльчатка для охлаждения.
Отличие в характеристиках электродвигателей
Конструктивные особенности и рабочие характеристики электродвигателей имеют решающее значение при выборе агрегатов. От этого зависит проектирование трансмиссий и всех силовых узлов механизмов. При выборе двигателя нужно опираться на общность и главные отличия в свойствах машин:
Синхронный и асинхронный электродвигатели находят каждый своё применение. Синхронные двигатели рекомендуется использовать везде при высоких мощностях, где присутствует непрерывный производственный процесс и не нужно часто перезапускать агрегаты или регулировать частоту вращения. Они используются в конвейерах, прокатных станах, компрессорах, камнедробилках и т. д. Современный синхронный электродвигатель имеет такой же быстрый запуск, как и асинхронный, но он меньше и экономичнее, чем асинхронный, равный по мощности.
Асинхронные электродвигатели с фазным ротором применяются там, где нужен большой пусковой момент и частые остановки агрегатов. Например, в лифтах и башенных кранах. Асинхронные электродвигатели с короткозамкнутым ротором получили широкое применение из-за простоты устройства и удобства в эксплуатации.
Используя достоинства разных агрегатов и то, чем отличается синхронный двигатель от асинхронного, можно делать обоснованный выбор того или иного мотора при проектировании машин, станков и другого оборудования.
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Конструктивные особенности и принцип работыОсновными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по .
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Достоинства и недостаткиСинхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного. Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
Выбор двигателяК вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть .
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление R добав.
Векторное управление для асинхронного электродвигателя «на пальцах» / Хабр
В предыдущей статье
«Векторное управление электродвигателем «на пальцах»рассматривалась векторная система управления для синхронных электродвигателей. Статья получилась большой, поэтому вопрос про асинхронные электродвигатели (induction motors) был вынесен в отдельную публикацию. Данная статья является продолжением предыдущей и опирается на приведенные там объяснения принципов работы электродвигателей. Она расскажет об особенностях работы асинхронного двигателя применительно к векторному управлению, а также покажет отличия в структуре векторной системы управления между синхронной и асинхронной машиной.
Как работает асинхронный электродвигатель? Наиболее популярное объяснение говорит что-то типа «статор создает вращающееся магнитное поле, которое наводит ЭДС в роторе, из-за чего там начинают течь токи, в результате ротор увлекается полем статора и начинает вращаться». Лично я от такого объяснения всю физику процесса понимать не начинаю, поэтому давайте объясню по-другому, «на пальцах».
Все же видели видео, как магнит взаимодействует с медным цилиндром? Особенно обратите внимание на диапазон времени с 0:49 до 1:03 – это уже самый настоящий асинхронный двигатель:
Эффект происходит из-за появления в цилиндре вихревых токов. Согласно закону электромагнитной индукции, открытого Майклом Фарадеем, при изменении магнитного потока замкнутого контура в нем возникает ЭДС (по-простому считайте, что напряжение). Эта ЭДС, применительно к медному цилиндру, тут же вызывает появление в цилиндре тока. При этом этот ток тоже создает свой, ответный магнитный поток, направленный ровно в противоположную сторону от изменения потока магнита, который мы подносим:
Индукционный ток, возникающий в замкнутом проводящем контуре, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток.
Это можно понимать так, что замкнутый контур сопротивляется изменению магнитного потока внутри себя. Если вы резко поднесёте магнит к медному цилиндру, т.е. сделаете резкое изменение магнитного потока, то в цилиндре потекут такие ответные токи, что магнитное поле внутри цилиндра в первый момент времени будет равно нулю: магнитное поле поднесенного магнита будет полностью скомпенсировано магнитным полем токов цилиндра (с допущениями, конечно). Если магнит поднести и держать, то токи в цилиндре из-за наличия активного сопротивления меди постепенно спадут, а поле цилиндра, создаваемое его токами, пропадет: магнитный поток постоянного магнита «прорвется» внутрь цилиндра, как будто никакого цилиндра и нет. Но стоит попытаться убрать магнит, как цилиндр отреагирует снова – теперь он будет пытаться сам «воссоздать» внутри себя пропадающий магнитный поток, т.е. будет опять сопротивляться изменению магнитного потока, в данном случае его исчезновению. Но что значит «воссоздать магнитный поток»? Это значит, что на какое-то время медный цилиндр можно считать условно «постоянным магнитом» – в нем циркулирует вихревой ток, создающий магнитное поле (на этом же принципе «висят» сверхпроводники в магнитном поле, но это совсем другая история).
Давайте теперь обратимся к конструкции асинхронного двигателя. Ротор асинхронного двигателя условно можно представлять себе также в виде медного цилиндра. Но в реальных конструкциях это некая решётка в виде «беличьей клетки» (рисунок 1) из меди или алюминия, совмещенная с магнитопроводом (шихтованное железо).
Рисунок 1. Ротор асинхронного двигателя типа «беличья клетка» с током в одной из «рамок» беличьей клетки, реагирующей на нарастание внешнего магнитного поля.
На рисунке схематично показано протекание тока в одной из «рамок», т.е. в некоторых прутьях беличьей клетки, если сверху поднести магнит (создать ток в статоре). На самом деле ток в этом случае протекает во всех прутьях, кроме, условно, верхнего и нижнего, для которых изменения потока нет (но они бы среагировали на горизонтально поднесенный магнит).
Помните ещё из начала прошлой статьи картинку со схематическим изображением двухфазной синхронной машины, где ротором был магнит? Давайте теперь сделаем из неё асинхронный двигатель: вместо магнита поставим две перпендикулярные короткозамкнутые катушки, символизирующие медный цилиндр ротора (рисунок 2).
Рисунок 2. Схематическое изображение двухфазного асинхронного двигателя с короткозамкнутым ротором.
Замена цилиндра на две катушки для пояснения принципа работы (или моделирования) корректна, точно также как корректна замена трехфазной обмотки на двухфазную. Только в этом случае мы заменяем… «бесконечнофазную обмотку» цилиндра (бесконечное число рамок) на две катушки с эквивалентной индуктивностью и сопротивлением. Ведь двумя катушками можно создать точно такой же вектор тока и магнитного потока, как и цилиндром.
А теперь давайте сделаем на короткое время из асинхронной машины синхронную. Подадим в катушку оси β постоянный ток и подождем секунды две-три, пока в роторе перестанут течь ответные токи: «поднесем внешний магнит». То есть дождемся спадания токов в роторе, чтобы магнитное поле статора «пронзило ротор» и никто ему не мешал. Что теперь будет, если выключить ток в статоре? Правильно, на те же две-три секунды, пока ток ротора этому противится, мы из ротора получим «обычный магнит» (рисунок 3).
Рисунок 3. Асинхронный двигатель, когда только что выключили постоянный ток по фазе
β– течет ток в роторе
ird.
Что же мы ждем? Быстрее, пока магнит не пропал, рисуем вдоль него привычную ось d (как в синхронной машине) и перпендикулярную ей ось q, привязанные к ротору. Включаем структуру векторного управления синхронной машиной, подаем ток по оси q, создавая момент, поехали!
Так можно даже действительно сделать несколько оборотов, пока наш сахарный магнит не растаял, а ось d не ушла в небытие. Что же делать? Давайте не будем выключать ток по оси d, подпитывая наш магнит! И опять же сохраним структуру векторного управления синхронной машиной, просто подав задание по оси d (раньше там был ноль). Итак, смотрим на рисунок 4: оси d, q по датчику положения «приделаны» к ротору, двигатель стоит, подан ток по оси d в статоре, что в данном случае для стоячей машины совпадает с осью β. Тока по оси q пока нет: ждем, пока ротор «намагнитится». И вот подаем ток isq (s – статор)! Поехали!
Рисунок 4. Подадим ток в ось
d, намагнитив машину, подготовив всё для подачи тока в ось
qстатора.
Далеко ли мы уедем таким методом барона Мюнхгаузена? К сожалению, нет. Смотрите, что произошло (рисунок 5):
Рисунок 5. А магнит-то сполз!
Двигатель начал крутиться, но через некоторое время после того, как мы подали ток в ось q, образовав суммарный ток is и «прибив» этот вектор к положению ротора, магнит в роторе «съехал»! И встал ровно вдоль вектора is. Ротор же не понимает, где мы нарисовали ему оси d, q… Ему все равно, крутился он или нет. Важно, что его внутренний «наведенный магнит» в конечном счете хочет стать сонаправленным с магнитным потоком статора, «подчиниться» внешнему потоку. Из-за съехавшего магнита двигатель перестанет крутиться: мало того, что между магнитом ротора и током iq нет желаемых 90 градусов, так еще и ток оси d теперь его тянет в противоположную сторону, компенсируя момент, создаваемый током iq. Метод барона Мюнхгаузена не удался.
Что же делать с ускользающим магнитом ротора? А давайте сделаем структуру векторного управления асинхронного двигателя не в осях d,q, приделанных к ротору, а в других осях, приделанных именно к текущему положению «магнита ротора» – назовем их оси x,y, чтобы отличать от d,q. По «научному» – это оси, ориентированные по потокосцеплению ротора. Но как же узнать, где конкретно сейчас это потокосцепление ротора, т.е. куда повернут магнит в роторе? Его положение зависит… во-первых, от положения самого ротора (датчик положения у нас есть, хорошо), во-вторых, от токов статора (создающих поток статора, по которому и собирается в конечном счете повернуться магнит ротора), а в-третьих от параметров роторной цепи – индуктивности и сопротивления «медного цилиндра» (он же беличья клетка, он же роторная обмотка, он же цепь ротора). Поэтому… зная всё это, положение «магнита» ротора можно просто вычислять по нескольким дифференциальным уравнениям. Делает это так называемый наблюдатель потокосцепления ротора, выделенный цветом на итоговой структурной схеме векторного управления асинхронным двигателем (рисунок 6).
Рисунок 6. Векторная датчиковая структура управления асинхронным двигателем
В наблюдатель заводятся показания с датчика положения ротора, а также текущие токи статора в осях α, β. На выходе наблюдателя – положение «магнита» ротора, а именно угол наблюдаемого потокосцепления ротора . В остальном структура полностью аналогична таковой для синхронной машины, только оси d,q переименованы в x,y, а на ось x подано задание тока, который будет поддерживать наш «магнит» в роторе. Также на многих обозначениях добавлен индекс “s”, чтобы показать, что данная величина имеет отношение к статору, а не к ротору. Также надо отметить, что в западной литературе не используют оси x,y: у них ось d всегда направлена по полю ротора, что для асинхронного двигателя, что для синхронного. Наши ученые еще в советское время разделили оси d,q и x,y, чтобы исключить путаницу: d,q прикреплены к ротору, а x,y к полю ротора.
Что же получается? Магнит ротора всё время скользит, сползает от текущего положения на роторе в сторону тока оси y. Чем больше этот ток, тем сильнее скольжение. Наблюдатель в реальном времени вычисляет положение этого магнита и «подкручивает» оси x,y всё время вперед по отношению к осям d,q (положению ротора). Ось x всегда соответствует текущему положению потокосцепления в роторе – положению «магнита». Т.е. оси x,y бегут всегда (в двигательном режиме) немного быстрее вращения ротора, компенсируя скольжение в нем. Токи в роторе, если их измерить или промоделировать, получаются синусоидальными. Только изменяются они не с частотой статорных токов, а с частотой этого скольжения, т.е. очень медленно. Если в статоре промышленного асинхронника 50Гц, то при работе под нагрузкой частота тока в роторе – единицы герц. Вот, собственно, и весь секрет векторного управления для асинхронного двигателя.
Чем векторное управление асинхронным двигателем лучше, чем скалярное? Скалярное управление это такое, когда к двигателю прикладывается напряжение заданной частоты и амплитуды – например, 380В 50Гц. И от нагрузки на роторе оно не зависит – никаких регуляторов токов, векторов… Просто задается частота напряжения и его амплитуда – скалярные величины, а токи и потоки в двигателе пусть сами себе удобное место находят, как хотят. В установившемся режиме работы двигателя векторное управление неотличимо от скалярного – векторное точно также будет прикладывать при номинальной нагрузке те же, скажем, 380В, 50Гц. Но в переходных режимах… если нужно быстро запустить двигатель с заданным моментом, если нужно отрабатывать диаграмму движения, если есть импульсная нагрузка, если нужно сделать генераторный режим с определенным уровнем мощности – всё это скалярное управление или не может сделать, или делает это с отвратительными, медленными переходными процессами, которые могут к тому же «выбить защиту» преобразователя частоты по превышению тока или напряжения звена постоянного тока (двигатель колеблется и может запрыгивать в генераторный режим, к которому преобразователь частоты не всегда приспособлен).
В векторной же структуре «всё под контролем». Момент вы задаете сами, поток тоже. Можно ограничить их на нужном уровне, чтобы не превысить уставок защиты. Можно контролируемо форсировать токи, если кратковременно нужно сделать в несколько раз больший момент. Можно регулировать не только момент двигателя, но и поток (ток оси x): если нагрузка на двигателе мала, то нет никакого смысла держать полный поток в роторе (делать магнит «номинального режима») – можно ослабить его, уменьшив потери. Можно стабилизировать скорость регулятором скорости с высокой точностью и быстродействием. Можно использовать асинхронный привод в качестве тягового (в транспорте), задавая требуемый момент тяги. В общем, для сложных применений с динамичной работой двигателя векторное управление асинхронным двигателем незаменимо.
Также есть отличительные особенности векторного управления асинхронного двигателя от синхронного. Первая – это датчик положения. Если для синхронного привода нам нужно знать абсолютное положение ротора, чтобы понять, где магнит, то в асинхронном приводе этого не требуется. Ротор не имеет какой-то выраженной полюсной структуры, «магнит» в нем постоянно скользит, а если посмотреть в формулы наблюдателя потокосцепления ротора, то там не требуется знания положения: в формулы входит только частота вращения ротора (на самом деле есть разные формулы, но в общем случае так). Поэтому на датчике можно сэкономить: достаточно обычного инкрементального энкодера для отслеживания частоты вращения (или даже тахогенератора), абсолютные датчики положения не требуются. Вторая особенность – управление потоком в асинхронном электродвигателе. В синхронной машине с постоянными магнитами поток не регулируется, что ограничивает максимальную частоту вращения двигателя: перестает хватать напряжения на инверторе. В асинхронном двигателе, когда это случается… просто уменьшаете задание по оси x и едете дальше! Максимальная частота не ограничена! Да, от этого будет снижаться момент двигателя, но, главное, ехать «вверх» можно, в отличие от синхронной машины (по-правде там тоже можно, но недалеко, не для всех двигателей и с кучей проблем).
Точно также существуют бездатчиковые алгоритмы векторного управления асинхронным двигателем, которые оценивают угол потокосцепления ротора не используя сигнал датчика положения (или скорости) вала ротора. Точно также, как и для синхронных машин, в работе таких систем есть проблемы на низкой частоте вращения ротора, где ЭДС двигателя мала.
Также следует сказать пару слов о роторе. Если для промышленных асинхронных двигателей его удешевляют, используя алюминиевую беличью клетку, то в тяге, где массогабаритные показатели важнее, наоборот, могут использовать медный цилиндр. Так, во всеми любимом электромобиле Tesla стоит именно асинхронный электродвигатель с медным ротором (рисунок 7)
Рисунок 7. Ротор асинхронного электродвигателя Tesla Model S в стальной обшивке (фото из разных источников за разные годы)
Вот, собственно, и всё, что я хотел сказать про асинхронный двигатель. В данной обзорной статье не рассмотрены многие тонкости, такие как регулятор потока ротора, возможное построение векторной структуры в других осях координат, математика наблюдателя потокосцепления ротора и многое другое. Как и в конце прошлой статьи, за дальнейшими подробностями отсылаю читателя к современным книгам по приводу, например к «Анучин А. С. Системы управления электроприводов. МЭИ, 2015».
На каком микроконтроллере можно сделать полноценное векторное управление, читайте, например, в статье «Новый отечественный motor-control микроконтроллер К1921ВК01Т ОАО «НИИЭТ», а как это отлаживать в статье «Способы отладки ПО микроконтроллеров в электроприводе». Также наша фирма ООО «НПФ Вектор» предлагает разработку на заказ систем управления электродвигателями и другим электрооборудованием, примеры выполненных проектов можно посмотреть на нашем сайте.
P.S.
У специалистов прошу прощения за не совсем корректное обращение с некоторыми терминами, в частности с терминами «поток», «потокосцепление», «магнитное поле» и другими – простота требует жертв…
Электродвигатель асинхронный трехфазный — устройство и принцип работы
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижной части статора и вращающейся части ротора. Эти части имеют сердечник и обмотку.
Ввиду того, что обмотка статора включается в сеть, она является первичной, обмотка ротора — вторичной. Энергия в обмотку ротора поступает из обмотки статора за счет магнитной связи.
Конструктивно асинхронные двигатели делятся на два вида:
— двигатели с короткозамкнутым ротором;
— двигатели с фазным ротором.
Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором.
Рисунок 1. Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором: 1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Статор состоит из корпуса 11 и сердечника 10 с трехфазной обмоткой.
Корпус двигателя изготавливается методом отлива из алюминиевого сплава или из чугуна. Двигатель изображенный на рисунке 1 имеет закрытое обдуваемое исполнение. Это можно определить по наличию на корпусе ряда продольных ребер, основным назначением которых является увеличение поверхности охлаждения двигателя.
В корпусе двигателя располагается сердечник статора 10. Он выполнен отштампованными листами из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрытых слоем изоляционного лака. Листы собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета.
Данная конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора в продольных пазах расположены пазовые части обмотки статора соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Ротор состоит из вала 1 и сердечника 9 с короткозамкнутой обмоткой.
Короткозамкнутая обмотка называется «беличье колесо». Беличья клетка представляет собой ряд металлических стержней (выполненных из алюминия или меди). Она располагаются в пазах сердечника ротора и замкнуты с двух сторон короткозамыкающими кольцами.
Рисунок 2. Короткозамкнутый ротор: а — обмотка «беличья клетка», б — ротор с обмоткой, выполненной методом литья под давлением; 1 — вал; 2 — короткозамыкающие кольца; 3 — вентиляционные лопатки.
Сердечник ротора имеет шихтованную конструкцию.
Короткозамкнутая обмотка ротора выполняется заливкой собранного сердечника ротора алюминиевым сплавом. Совместно со стержнями обмотки отливаются короткозамыкающие кольца и вентиляционные лопатки (рисунок 2).
Вращение вала ротора осуществляется в подшипниках качения 2 и 6. Подшипники качения располагаются в подшипниковых щитах 3 и 7.
Охлаждение двигателя выполняется методом обдува поверхности корпуса. Поток воздуха нагнетается центробежным вентилятором 5, закрытого кожухом 8.
На обратной стороне кожуха располагаются отверстия для забора воздуха.
Концы обмоток фаз выводят на зажимы коробки выводов 4.
Рисунок 3. Расположение выводов об¬мотки статора (а) и положение перемычек при соединении обмотки статора звездой и треугольником (б)
Асинхронные двигатели предназначены для работы в трехфазной сети и могут работать на двух разных напряжениях, отличающиеся в √3 раз.
Выводы обмоток фаз в коробке выводов располагают таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания. Крепление двигателя к поверхности осуществляется посредством лап 12
В качестве защиты персонала от поражения электрическим током на двигателях предусмотрены болты заземления (как правило, менее двух).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с короткозамкнутым ротором показана на рисунке 4.
Рисунок 4. Принципиальные схемы включения трехфазных асинхронных двигателей с
короткозамкнутым (а) и фазным (б) ротором
Трехфазный асинхронный двигатель с фазным ротором.
Рисунок 5. Устройство трехфазного асинхронного двигателя с фазным ротором: 1, 7 — подшипники, 2,6 — подшипниковые щиты, 3 — корпус, 4 — сердечник статора с обмоткой, 5 — сердечник ротора, 8 — вал, 9 — коробка выводов, 10 — лапы, 11 — контактные кольца.
Статор этого двигателя также состоит из корпуса 3 и сердечника 4 с трехфазной обмоткой. Подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. Лапы для крепления 10. Коробка выводов 9.
Ротор асинхронного двигателя с фазным ротором имеет более сложную конструкцию. На валу 8 закреплен шихтованный сердечник 5 с трехфазной обмоткой, выполненной аналогично об¬мотке статора. Обмотку ротора соединяют звездой и ее выводы при¬соединяются к контактным кольцам 11, расположенным на валу. Контактные кольца изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо 1 накладывают щетки 2, располагаемых в щеткодержателях 3. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке 4 б. Обмотка ротора асинхронного двигателя с фазным ротором соединена с пусковым реостатом ПР, который создает в цепи ротора добавочное сопротивление Rдоб.
Асинхронные двигатели с короткозамкнутым ротором — Engg Cyclopedia
Возможно, наиболее известным типом электродвигателей, используемых в настоящее время, является трехфазный асинхронный двигатель с короткозамкнутым ротором.
Обычно он состоит из двух (2) основных компонентов: статора и ротора . Как следует из их названия, часть статора неподвижна, а часть ротора вращается. Статор создает вращающееся магнитное поле по сравнению с ротором, которое преобразует этот тип энергии в движение, т.е.е. механическая энергия. См. Рис. 1 (D-конец обозначает конец с приводом от двигателя, то есть оборудование, приводимое в движение двигателем, например, насос, расположено на этой стороне, тогда как конец N обозначает неприводной конец двигателя)
Рисунок 1 — Конструкция электродвигателяКак работает электродвигатель
Чтобы объяснить, как работает электродвигатель, необходимо сначала отметить, что статор подключен к трехфазному источнику питания. Ток, который прикладывается к обмоткам статора, создает вращающееся магнитное силовое поле, которое, в свою очередь, создает ток также на роторе двигателя.В результате на роторе также создается магнитное поле. Взаимодействие между этими двумя магнитными полями (т.е. от статора и от ротора) дает вращающий момент , который является причиной вращения вала ротора.
Скорость вращения двигателя и скольжение двигателя
Из-за различных потерь, присущих самой природе двигателя, скорость двигателя всегда примерно на 1–3% ниже по сравнению с синхронной скоростью магнитного поля. Эта разница обычно обозначается как пробуксовка двигателя .
Скольжение рассчитывается по следующей формуле:
s = (n1 — n) / n1 …. (1), где:
n1 = синхронная скорость
n = асинхронная скорость
В результате этот тип двигателей обычно известен как асинхронные двигатели .
Однако следует отметить, что двигатели с постоянными магнитами вообще не производят скольжения (двигатели с постоянными магнитами в этой статье обсуждаться не будут).
Синхронная скорость (n), , выраженная в оборотах в минуту (или об / мин), определяется по следующей формуле:
n = (120 * f) / p …. (2), где:
f = частота питания двигателя (в Гц) и
p = количество полюсов двигателя (четное число)
КПД электродвигателя
Как и ожидалось, преобразование энергии в асинхронном двигателе с короткозамкнутым ротором не без потерь. Происходит несколько потерь, среди прочего, в результате потерь сопротивления, потерь на вентиляцию, потерь на трение и т. Д.
Следовательно, КПД двигателя (n) выражается следующей формулой:
n = P2 / P1 …. (3), где
P2 = мощность на валу двигателя (Вт)
P1 = приложенная электрическая мощность (Вт)
P2 указан на заводской табличке двигателя.
Класс изоляции
Класс изоляции относится к изоляционному материалу обмоток двигателя. Существует несколько классов изоляции, а именно B, F и H, в соответствии со стандартами IEC (Международной электротехнической комиссии). Буква, соответствующая температуре, которая является верхним пределом для области применения изоляции, характеризует каждый класс изоляции.
Класс изоляции B соответствует максимальной температуре обмотки 130 ° C (температура окружающей среды 40 ° C + повышение температуры 80 ° C + температурный запас 10 ° C)
Класс изоляции F соответствует максимальной температуре обмотки 155 ° C (температура окружающей среды 40 ° C + повышение температуры 105 ° C + температурный запас 10 ° C)
Класс изоляции H соответствует максимальной температуре обмотки 180 ° C (температура окружающей среды 40 ° C + повышение температуры 125 ° C + температурный запас 15 ° C)
Класс защиты
Класс защиты двигателя обозначается буквами IP ( IP означает Ingress Protection ), за которыми следуют две цифры, первая из которых указывает степень защиты от контакта и проникновения твердых предметов, а вторая указывает на степень защиты двигателя. степень защиты от воды.Эта классификация соответствует стандарту IEC 60034-5. Для получения более подробной информации о обозначении защиты IP, пожалуйста, обратитесь к статье Enggyclopedia о «Корпуса с защитой от проникновения».
Способ охлаждения
Методы охлаждения в соответствии с IEC 60034-6 могут сказать, как охлаждается асинхронный двигатель с короткозамкнутым ротором. Метод охлаждения обозначается буквами IC ( IC обозначает International Cooling ), за которыми следует серия цифр, обозначающих тип охлаждения (например,грамм. самовентилируемый, принудительное охлаждение и т. д.) и режим работы охлаждения (например, поверхностное охлаждение, жидкостное охлаждение и т. д.). Пожалуйста, обратитесь к Рисунку 2, на котором показаны наиболее распространенные методы охлаждения асинхронных двигателей с короткозамкнутым ротором.
Рисунок 2 — Распространенные методы охлаждения электродвигателяКак работает двигатель с короткозамкнутым ротором?
Обмотки возбуждения в статоре асинхронного двигателя создают вращающееся магнитное поле через ротор. Относительное движение между этим полем и вращением ротора индуцирует электрический ток в проводящих стержнях.В свою очередь, эти продольные токи в проводниках взаимодействуют с магнитным полем двигателя, создавая силу, действующую по касательной, ортогональной к ротору, в результате чего возникает крутящий момент для вращения вала. Фактически ротор вращается с помощью магнитного поля, но с немного меньшей скоростью вращения. Разница в скорости называется проскальзыванием и увеличивается с нагрузкой.
Проводники часто слегка перекошены по длине ротора, чтобы уменьшить шум и сгладить колебания крутящего момента, которые могут возникнуть на некоторых скоростях из-за взаимодействия с полюсными наконечниками статора.Количество стержней на короткозамкнутой клетке определяет, в какой степени индуцированные токи возвращаются к катушкам статора и, следовательно, ток через них. В конструкциях с наименьшей обратной связью используется простое количество столбцов.
Стальной сердечник служит для переноса магнитного поля через проводники ротора. Поскольку магнитное поле в роторе меняется со временем, сердечник имеет конструкцию, аналогичную сердечнику трансформатора, для уменьшения потерь энергии сердечника. Он состоит из тонких пластин, разделенных лаковой изоляцией для уменьшения вихревых токов, циркулирующих в сердечнике.Материал представляет собой низкоуглеродистое, но высококремнистое железо с удельным сопротивлением, в несколько раз превышающим удельное сопротивление чистого железа, что дополнительно снижает потери на вихревые токи и низкую коэрцитивную силу для уменьшения потерь на гистерезис.
Одна и та же базовая конструкция используется как для однофазных, так и для трехфазных двигателей широкого диапазона типоразмеров. Роторы для трехфазных двигателей будут иметь различную глубину и форму стержней в соответствии с классификацией конструкции. Как правило, толстые стержни обладают хорошим крутящим моментом и эффективны при низком скольжении, так как имеют более низкую проводимость по отношению к ЭДС.По мере увеличения скольжения скин-эффект начинает уменьшать эффективную глубину и увеличивает сопротивление, что приводит к снижению эффективности, но по-прежнему поддерживает крутящий момент.
Если вам нужна помощь с двигателем или вам нужен новый двигатель, напишите нам по адресу [адрес электронной почты защищен], и мы будем рады помочь.
Три наиболее распространенных метода пуска для двигателей с короткозамкнутым ротором
Три наиболее распространенных метода пуска для двигателей с короткозамкнутым ротором — это PWS (запуск с частичной обмоткой), WDS (запуск по схеме звезда-треугольник) и электронный плавный пуск.Каждый из них служит примерно той же цели, но зависит от количества предоставленных контакторов. Каждый также служит для питания обмоток и постепенного перевода их в рабочий режим.
Начало намотки части (PWS) Цель использования PWS — уменьшить бросок тока в двигатель, чтобы избежать недопустимого провала напряжения (мерцающие огни, переключение контакторов в выключенное положение), быстрого перегрева и повышенного электрического шума.Только часть обмотки запитывается при пониженном пусковом токе, а затем увеличивается через 2-3 секунды, чтобы перевести обмотку в рабочий режим. PWS имеет шесть выводов, пронумерованных 1, 2, 3, 7, 8 и 9. Выводы 1, 2 и 3 запитаны для запуска. Затем на комбинацию этих шести выводов подается питание для режима работы.
Номера выводов двигателя PWS отличаются от числа выводов двигателя «звезда-треугольник». Использование соединения звезда-треугольник для обмотки, настроенной для работы в режиме PWS, приведет к необходимости переподключения или возврата двигателя.Как отличить PWS от WDS? Пускатель PWS использует два контактора, тогда как WDS использует три с дополнительным контактором, используемым для создания «Y» (звезда) во время запуска.
Пуск WYE-треугольник (WDS)
В методе WDS используется буква «Y»
или конфигурация звезды, чтобы запитать всю обмотку при запуске, затем переходит в конфигурацию треугольника для режима работы. На обмотку подается пониженный ток, позволяющий ей оставаться в звездообразном режиме на время пуска.В зависимости от приложения время «старта» может составлять до 30 минут. Крутящий момент двигателя в звездообразном режиме низкий, что предпочтительно для нагрузок, требующих плавного пуска. Это предотвращает запуск двигателя через линию, что может привести к повреждению вала или шестерен.
Шесть выводов для схемы звезда-треугольник пронумерованы 1, 2, 3, 4, 5 и 6, при этом выводы 1, 2 и 3 находятся под напряжением в режиме запуска. Выводы 4, 5 и 6 подключаются с помощью контактора звезды, затем 1-6, 2-4, 3-5 запитываются для режима работы. Как и в случае PWS, разводка «звезда-треугольник» с использованием конфигурации PWS приводит к разборке двигателя и изменению конфигурации проводки.
Электронный плавный пуск
Для поперечной компоновки вы можете использовать метод электронного плавного пуска с одним или двумя вариантами. В одной версии SCR (кремниевые выпрямители) используются последовательно с линией 3-выводного двигателя. Другая версия размещает тиристоры внутри треугольника двигателя, соединенного звездой-треугольником (шесть выводов). Обе версии обеспечивают регулируемое пониженное напряжение на клеммах двигателя при запуске. По сути, двигатель запускается плавно, затем напряжение увеличивается до тех пор, пока двигатель не достигнет номинальной скорости, в конечном итоге минуя устройство плавного пуска и подключая двигатель к сети.Использование электронного плавного пуска позволяет контролировать пусковой ток, крутящий момент, время и ускорение. Однако инерция нагрузки будет влиять на время пуска независимо от метода пуска с пониженным напряжением или крутящим моментом.
Асинхронный двигатель с короткозамкнутым ротором — Electric4uonline
Что такое асинхронный двигатель с короткозамкнутым ротором?
Асинхронный двигательс короткозамкнутым ротором — это асинхронный двигатель переменного тока, работа которого основана на принципе электромагнетизма.
Почему такое название — асинхронный двигатель с короткозамкнутым ротором?
Такое название двигателя с короткозамкнутым ротором происходит от того факта, что ротор двигателя выглядит как клетка с короткозамкнутым ротором ( ротор с короткозамкнутым ротором ).
Конструкция асинхронного двигателя с короткозамкнутым ротором
Этот двигатель состоит из четырех основных частей
Статор трехфазного короткозамкнутого ротора
Статор состоит из трехфазной обмотки (обычно из меди) в сердечнике и металлическом корпусе.
Обмотки изготовлены из меди или алюминия и установлены на многослойном железном сердечнике, чтобы обеспечить путь с низким сопротивлением для магнитного потока, создаваемого токами переменного тока.
Ротор
Ротор — это вращающаяся часть двигателя, обеспечивающая механическую мощность. Он состоит из вала, сердечника и короткозамкнутых (медных) или алюминиевых стержней.
Вентилятор
Асинхронный двигатель с короткозамкнутым роторомTEFC (полностью закрытый вентиляторный охладитель) имеет вентилятор, установленный и закрепленный на валу ротора, для втягивания воздуха на поверхность двигателя для его охлаждения.
Подшипники
Подшипникислужат основой для движения ротора и обеспечивают плавное вращение двигателя.
Асинхронный двигатель с короткозамкнутым ротором Принцип работы
Вращающееся магнитное поле создается в космосе, когда на обмотку статора подается питание. Скорость поля, известная как синхронная скорость.
Ток короткого замыкания начинает течь в стержнях ротора из-за магнитного поля и создает собственное магнитное поле, которое взаимодействует с полем статора.
Теперь ротор начинает следовать за вращающимся магнитным полем статора, пытаясь противодействовать его причине, и ротор вращается.
Применение двигателей
Трехфазный асинхронный двигатель — наиболее широко используемый двигатель во всех отраслях промышленности и в электротехнике.
Они подходят для таких приложений, как:
- Нефтяные и газовые насосы, вентиляторы и приложения.
- Центробежные насосы.
- Для запуска конвейерных лент на заводах.
- Большие вентиляторы и воздуходувки.
Преимущества
- Высокая эффективность.
- Низкая стоимость.
- Требует меньшего технического обслуживания по сравнению с двигателями с контактными кольцами (без контактных щёток и колец).
Недостатки
- Высокий пусковой ток, который влияет на напряжение питания и может вызвать остановку других нагрузок из-за падения напряжения.
- Низкий пусковой момент.
- Плохое управление скоростью. Чтобы контролировать его скорость, вам понадобится VSD, который стоит дорого.
- Если напряжение питания снижается, двигатель потребляет больше тока и может сгореть, если максимальная токовая защита не сможет изолировать электрическую энергию.
— типы мотора
Самый распространенный тип трехфазных асинхронных двигателей — это беличья клеточного типа. Этот электродвигатель получил свое название от того факта, что ротор напоминает колесо беличьей клетки. Имеет очень простой и прочный дизайн, поэтому он очень универсален. Не говоря уже о том, что он используется в большинство коммерческих и промышленных приложений.
Конструкция двигателя с короткозамкнутым ротором
Двигатель с короткозамкнутым ротором состоит в основном из двух блоков, а именно:
- Ротор
- Статор
Ротор (или вторичный) также изготовлен из листовой стали, но обмотки состоят из токопроводящих шин, расположенных примерно параллельно к валу и близко к поверхности ротора.Эти обмотки соединены на каждом конце ротора сплошным кольцом. Роторы больших двигатели имеют стержни и кольца из меди, соединенные на каждом конце токопроводящее концевое кольцо из меди или латуни. Стыки между брусьями и концевые кольца обычно электрически сварены в одно целое, причем воздуходувки, установленные на каждом конце ротора. В небольших роторах с короткозамкнутым ротором, стержни, концевые кольца и воздуходувки отлиты из алюминия как одно целое вместо того, чтобы сваривать вместе.
Статор (или первичный элемент) состоит из многослойного сердечника из листовой стали с пазы, в которых размещаются изолированные катушки.Катушки сгруппированы и соединены, чтобы сформировать определенную полярную область и произвести вращающееся магнитное поле при подключении к многофазному переменному току.
Воздушный зазор между ротором и статором должен быть очень маленьким, чтобы для получения наилучшего коэффициента мощности. Следовательно, вал должен быть очень жесткие и снабжены качественными подшипниками втулки или шарикоподшипникового типа.
Принцип работыВ двигателе с короткозамкнутым ротором вторичная обмотка заменяет обмотка возбуждения синхронного двигателя.Как и в синхронном двигателе, токи в статоре создают вращающееся магнитное поле. Это поле производятся увеличивающимися и уменьшающимися токами в обмотках. Когда ток увеличивается в первой фазе, только первая обмотка создает магнитное поле. По мере уменьшения тока в этой обмотке и увеличивается во втором, магнитное поле немного сдвигается, пока не станет все производится по второй обмотке. Когда третья обмотка имеет максимум ток, протекающий в нем, поле сдвигается еще немного.Обмотки распределены так, чтобы это смещение было равномерным и непрерывным. это это действие, которое создает вращающееся магнитное поле.
Когда это поле вращается, оно перерезает проводники беличьей клетки, и в них устанавливаются напряжения, как если бы проводники перерезали поле в генераторе постоянного тока. Эти напряжения вызывают протекание токов в беличий контур — через решетку под прилегающим югом полюса в другое концевое кольцо и обратно к исходным стержням под северные полюса, чтобы замкнуть цепь.
Ток, протекающий в беличьей клетке, на одну группу стержней и обратно в соседнюю группу, делает петлю, которая устанавливает магнитный поля в сердечнике ротора с северным и южным полюсами. Этот цикл состоит одного витка, но есть несколько параллельных проводов и токи могут быть большими. Полюса в роторе притягиваются полюсами. вращающегося поля, создаваемого токами в обмотке якоря и следуйте за ними так же, как поле полюса следуют за полюсами якоря в синхронном двигателе.
Однако есть одно интересное и важное различие между синхронный и асинхронный двигатель: ротор последнего не вращаются так же быстро, как вращающееся поле в якоре. Если белка клетка должна была двигаться так же быстро, как вращающееся поле, проводники в ней будет стоять неподвижно относительно вращающегося поля, а не резка по полю. Тогда в беличьей клетке не было бы индуцированного напряжения, не было бы токов в нем нет магнитных полюсов, установленных в роторе, и нет притяжения между это и вращающееся поле в статоре.
что такое двигатель с короткозамкнутым ротором — Операция
Что такое двигатель с короткозамкнутым ротором?Двигатель с короткозамкнутым ротором представляет собой асинхронный электродвигатель, вращающаяся часть или ротор которого образован набором проводящих стержней, параллельных осевому направлению и расположенных в цилиндрической форме вокруг оси.
Эта форма напоминает клетки, подобные тем, которые использовались для ловли белок на старом североамериканском западе, отсюда и название. Они также являются наиболее экономичными, долговечными и требуют меньшего обслуживания, поскольку в них отсутствуют угли, щетки или коллекторы в роторе, которые не нужно электрически подключать к какому-либо внешнему источнику тока.двигатель с короткозамкнутым ротором
Первые двигатели с вращающимся полем были независимо изобретены между 1885 и 1886 годами двумя великими электрическими гениями: Галилео Феррарисом и Николой Тесла. Эти двигатели были предшественниками современных двигателей с короткозамкнутым ротором.
Двигатель с короткозамкнутым ротором переменного тока, который может быть трехфазным, двухфазным или однофазным. В зависимости от типа блока питания конструкция может немного отличаться, но принцип действия всегда один. двигатель с короткозамкнутым ротором
Работа двигателя с короткозамкнутым роторомПринцип действия основан на создании вращающегося магнитного поля в центре двигателя с помощью статической обмотки на его периферии, которая питается переменным током.
Указанное вращающееся магнитное поле индуцирует токи в стержнях, составляющих обойму ротора, и эти токи, в свою очередь, создают вторичное магнитное поле, которое взаимодействует с первичным полем, создавая крутящий момент или момент на роторе.
Ключ к работе — создание вращающегося магнитного поля, перпендикулярного оси вращения. Это вращающееся поле оказывает крутящее магнитное воздействие на продольные стержни клетки при протекании тока. двигатель с короткозамкнутым ротором
Для генерации тока в токопроводящих стержнях, параллельных оси вращения клетки, внешний источник тока не требуется, поскольку само вращающееся поле за счет магнитной индукции способно индуцировать ток на стержнях клетки.
То есть до тех пор, пока есть разница между скоростью вращения магнитного поля и скоростью вращения ротора. двигатель с короткозамкнутым ротором
Вращающееся магнитное поле в трехфазном двигателеДвигатели с короткозамкнутым ротором могут быть трехфазными или однофазными. В случае трехфазного двигателя, то есть того, который работает с трехфазным переменным током, каждая фаза опережает предыдущую на 120º, то есть на одну треть периода.
Изображение, показывающее вращающееся магнитное поле, образующееся
В каждом электродвигателе есть две части:
- Статор , периферийная часть двигателя, закрепленная относительно его корпуса.
- Ротор , вращающая центральную часть двигателя.
В статоре имеется пакет рифленых и эмалированных листов (для предотвращения вихревых токов или вихревых токов) и высокая магнитная проницаемость.
Кабели, покрытые изоляционным лаком, проходят через канавку, образуя не менее трех витков или витков, сдвинутых по фазе на 120º. На три катушки подается трехфазный переменный ток, и каждая фаза также сдвинута на 120º по сравнению с предыдущей.двигатель с короткозамкнутым ротором
В каждый момент наложение магнитных полей дает результирующее поле, перпендикулярное оси вращения двигателя. С течением времени объединенное магнитное поле трех катушек сохраняет свою амплитуду, но его направление всегда перпендикулярно оси вращения, вращается с частотой, равной частоте переменного тока, обычно между 50 и 60 Гц.
Ротор с короткозамкнутым роторомОн состоит из двух токопроводящих колец, соединенных восемью или более продольными токопроводящими стержнями, параллельными оси вращения.
Рисунок 3. Ротор с короткозамкнутым ротором.
Крутящий момент через роторЧтобы понять, как вращающееся поле создает крутящий момент на клетке, можно представить себе минимальную клетку, состоящую из двух диаметрально противоположных продольных стержней.
Когда эта клетка изначально находится в состоянии покоя и благодаря электродвижущей силе, вращающееся поле, которое проходит через нее, вызывает движение заряда в каждом стержне. Однако, поскольку стержни закорочены на концах токопроводящим кольцом, между противоположными стержнями возникает ток.
С другой стороны, поскольку стержни перемещаются относительно поля статора, на них появляется сила магнитного происхождения, известная как сила Лоренца, которая перпендикулярна радиальному полю статора и направлению тока в каждый бар.
Для того, чтобы на стержнях был ток и крутящий момент, необходимо, чтобы они имели относительное движение по отношению к радиальному магнитному полю, создаваемому в статоре. двигатель с короткозамкнутым ротором
Следовательно, скорость вращения клетки всегда меньше, чем у магнитного поля.Из-за отсутствия синхронизации между ротором и полем это асинхронный двигатель.
Следовательно, в каждом стержне создается пара противоположных сил, которая создает крутящий момент в упрощенной клетке, и точно так же в клетках с более чем двумя стержнями.
Ротор с железным сердечникомУсовершенствование заключается в помещении встроенной клетки в набор ламинированных и эмалированных дисков, изготовленных из материала с высокой магнитной проницаемостью, такого как железо. двигатель с короткозамкнутым ротором
Цель состоит в том, чтобы умножить напряженность магнитных полей, создаваемых как статором, так и самим ротором.Именно благодаря взаимодействию этих двух полей на роторе создается крутящий момент.
Опыт показал, что если стержни сепаратора наклонены к оси вращения, двигатель работает более плавно и с меньшей вибрацией.
При более высокой нагрузке на ротор скорость скольжения ротора относительно скорости вращения магнитного поля статора также увеличивается. Следовательно, максимальные токи и максимальные крутящие моменты возникают, когда ротор заблокирован, поэтому перегруженный двигатель может подвергнуться перегреву и, как следствие, повреждению изоляционных лаков и эмалей катушек и пластин, составляющих сердечники статора. и ротор.
Мотор с короткозамкнутым роторомТрехфазные двигатели с короткозамкнутым ротором предпочтительны для промышленного применения. Они менее рекомендуются для домашнего использования, в котором предпочтительнее использовать асинхронный однофазный двигатель, поскольку трехфазный ток обычно не достигает жилых домов.
Центробежные насосыДвигатели с короткозамкнутым ротором предпочтительнее для центробежных насосов.
Станки токарные и фрезерныеОни также идеально подходят для больших токарных и фрезерных станков, а также в отраслях, где требуются конвейерные ленты и воздуходувки.
Раскрой и высечка листовЭти типы двигателей подходят для тяжелой промышленности штамповки и резки листового металла. двигатель с короткозамкнутым ротором
ПреимуществоДвигатели с короткозамкнутым ротором имеют множество преимуществ перед другими типами электродвигателей:
- При одинаковой мощности двигатели с короткозамкнутым ротором компактнее и легче синхронных двигателей.
- Они полностью масштабируемы, то есть их можно создавать от маленьких до очень больших.двигатель с короткозамкнутым ротором
- Крутящий момент двигателей с короткозамкнутым ротором обычно выше, чем у двигателей других типов, что очень хорошо подходит для интенсивного использования.
- КПД трехфазных двигателей с короткозамкнутым ротором превышает 70%. Асинхронные однофазные двигатели имеют более низкую производительность, но всегда выше, чем двигатели постоянного тока.
- В связи с развитием силовой электроники стало возможным электронное управление скоростью указанных двигателей путем изменения частоты тока.
Из основных недостатков можно отметить:
- Асинхронные двигатели потребляют большой ток в момент запуска, поэтому они не подходят для применений, в которых двигатель должен постоянно запускаться и останавливаться, поскольку это может привести к перегрузке в электрической системе.
- Несмотря на то, что силовая электроника продвинулась вперед, скорость их вращения не так управляема, как у шаговых двигателей.
Объяснение конструкции асинхронного двигателя с короткозамкнутым ротором
Введение
Мы видели классификацию A.C. двигатели и подробно обсудили принцип работы, концепцию вращения ротора и многие другие аспекты асинхронного двигателя. Теперь давайте подробно обсудим наиболее распространенную форму асинхронного двигателя, асинхронный двигатель с короткозамкнутым ротором. Причина названия «Беличья клетка» связана с типом ротора, который используется в этих двигателях. Почти 95% используемых асинхронных двигателей относятся к типу с короткозамкнутым ротором. А в предыдущей статье «Типы электрических двигателей» мы классифицировали асинхронные двигатели в зависимости от типа используемого ротора.Это
асинхронные двигатели с короткозамкнутым ротором и
асинхронные двигатели с контактным кольцом или фазным ротором
Конструкция индукционного двигателя с короткозамкнутым ротором
Любой асинхронный двигатель имеет статор и ротор. Конструкция статора для любого асинхронного двигателя практически одинакова. Но конструкция ротора отличается от типа, указанного выше.
Статор:
Статор — это самый внешний компонент двигателя, который можно увидеть.Он может быть сконструирован для однофазных, трехфазных или даже многофазных двигателей. Но в основном меняются только обмотки статора, а не базовая схема статора. Это почти то же самое для любого синхронного двигателя или генератора. Он состоит из нескольких штамповок, в которые вставлены обмотки. Давайте посмотрим на конструкцию трехфазного статора. Трехфазные обмотки размещены в пазах многослойного сердечника, и эти обмотки электрически разнесены на 120 градусов друг от друга. Эти обмотки подключаются по схеме звезды или треугольника в зависимости от требований.Выводы выводятся, как правило, по три, и подводятся к клеммной коробке, установленной на корпусе двигателя. Изоляция между обмотками обычно покрывается лаком или оксидом.
Ротор: беличья клетка Ротор:
Этот вид ротора состоит из многослойного цилиндрического сердечника с параллельными прорезями для проводов ротора, которые не являются проводами, как мы думаем, а толстыми и тяжелыми медными стержнями. или алюминий (алюминий) или его сплавы. Токопроводящие шины вставляются с одного конца ротора и по одной шине в каждый паз.На обоих концах ротора имеются торцевые кольца, которые приварены, электрически скреплены или даже закреплены болтами, что обеспечивает непрерывность электрической цепи. Эти концевые кольца закорочены, после чего они придают красивый вид, похожий на белку, отсюда и название.
Следует отметить один важный момент: концевые кольца и токопроводящие шины ротора постоянно закорочены, поэтому невозможно добавить какое-либо внешнее сопротивление последовательно с цепью ротора для запуска. Токопроводящие стержни ротора обычно не параллельны валу, а специально имеют небольшой перекос.В небольших двигателях ротор изготавливается по-другому. Весь сердечник ротора помещается в форму, а стержни и концевые кольца ротора отливаются в одно целое. Обычно используемый металл — это алюминиевый сплав. Некоторые очень маленькие роторы, работающие на вихревых токах, имеют ротор из твердой стали без каких-либо проводников.
Причины перекоса ротора
Это помогает уменьшить магнитный фон, таким образом, двигатель остается тихим,
Это также помогает избежать «зацепления» я.е. тенденция к блокировке ротора. Склонность зубцов ротора оставаться под зубьями статора из-за прямого магнитного притяжения между ними,
Увеличение эффективного коэффициента трансформации между статором и ротором,
Повышенное сопротивление ротора из-за сравнительно более длинных токопроводящих стержней ротора, &
5. Повышенное скольжение при заданном крутящем моменте.
Двигатель с короткозамкнутым ротором
Мы уже обсуждали, что ротор с короткозамкнутым ротором имеет два концевых кольца, которые постоянно закорочены с проводниками ротора.Таким образом, внешнее сопротивление не могло быть добавлено к цепи ротора. Поскольку ротор имеет очень низкое сопротивление, пусковой момент был очень низким. Пусковой крутящий момент может быть увеличен за счет использования обоймы с высоким сопротивлением, но двигатель будет иметь очень низкий КПД в нормальных условиях работы, так как будут большие потери Cu. Итак, мистер Бушор придумал двигатель, который имел две независимые обоймы на одном роторе. Наружная клетка состоит из стержней из металла с высоким сопротивлением, а внутренняя клетка — из медных стержней с низким сопротивлением.Таким образом, внешняя клетка имеет высокое сопротивление с низким отношением реактивного сопротивления к сопротивлению, а внутренняя клетка имеет низкое сопротивление, но высокое отношение реактивного сопротивления к сопротивлению. Таким образом, внешняя клетка развивает максимальный крутящий момент при запуске, а внутренняя клетка — при проскальзывании около 15%.
Стандартные типы двигателей с короткозамкнутым ротором
Трехфазные асинхронные двигатели с короткозамкнутым ротором подразделяются на 6 различных стандартных типов в зависимости от их электрических характеристик. Они различаются в таблице ниже:
Примечания:
Класс A : ротор с короткозамкнутым ротором имеет относительно низкое сопротивление и реактивное сопротивление.Общая конструкция пазов в роторе такова, что стержни ротора расположены близко к поверхности, чтобы уменьшить реактивное сопротивление.
Класс B: Эти двигатели могут запускаться при полной нагрузке, развивая нормальный пусковой момент. Ротор имеет глубокие и узкие пазы, чтобы обеспечить высокое реактивное сопротивление при запуске. Эти двигатели хорошо подходят для тех приложений, где есть ограничение по пусковому току. Эти двигатели также можно запускать при пониженном напряжении.
Класс C: Это двигатели с двойным короткозамкнутым ротором. Эти роторы с двойным короткозамкнутым ротором сочетают в себе высокие пусковые моменты с низкими пусковыми токами. Эти двигатели обладают высокими характеристиками пускового момента и подходят для пуска при пониженном напряжении.
Класс D: Эти двигатели обладают высокими пусковыми моментами, что достигается за счет конструкции пазов ротора. Эти пазы ротора имеют тонкие стержни ротора, которые уменьшают поток утечки ротора, а полезный поток — высоким.
Класс E : Эти двигатели имеют относительно очень низкое скольжение при номинальной нагрузке. Для двигателей мощностью более 5 кВт пусковой ток может быть достаточно высоким, чтобы потребовать компенсатор или пускатель сопротивления.
Класс F : Эти двигатели сочетают в себе низкий пусковой момент с низким пусковым током и могут запускаться при полном напряжении. Это достигается за счет конструкции пазов ротора, показанной на рисунке.
В следующей статье мы рассмотрим процедуру пуска и различные методы пуска асинхронного двигателя с короткозамкнутым ротором.Также будут подчеркнуты различные методы контроля скорости.
Изображение и контент Кредиты
Clayton Engineering
Электромоторы Audel от Miller & Richard
Машины A.