«Бесколлекторные двигатели» ЛикБез и проектирование — Паркфлаер
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
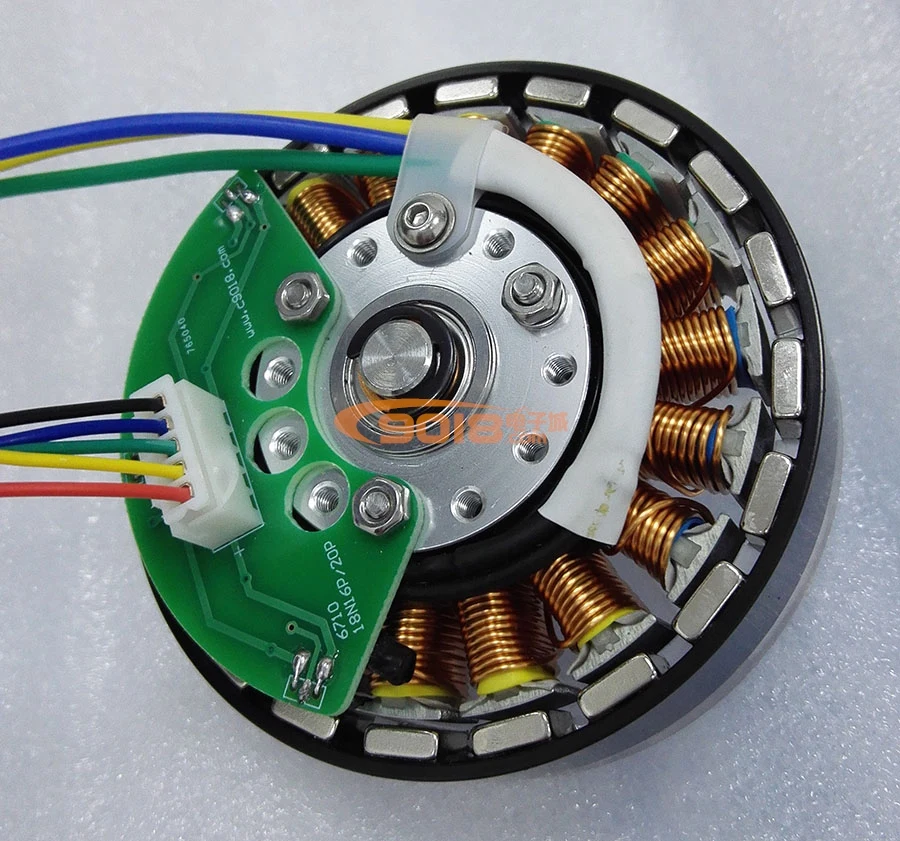
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать.
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1. 73 раз. (впоследствии было выбрано соединение треугольник)
73 раз. (впоследствии было выбрано соединение треугольник)
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея.
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм.
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи.
Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. — Avislab
Общее устройство (Inrunner, Outrunner)
Бесколлекторный двигатель постоянного тока состоит из ротора с постоянными магнитами и статора с обмотками. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками.Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора.
Магниты и полюса
Количество полюсов на роторе четное. Форма применяемых магнитов обычно прямоугольная. Цилиндрические магниты применяются реже. Устанавливаются они с чередованием полюсов.Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья
Обмотка трехфазного бесколлекторного двигателя выполняется медным проводом. Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.
Провод может быть одножильным или состоять из нескольких изолированных жил. Статор выполняется из нескольких сложенных вместе листов магнитопроводящей стали.Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
Бесщеточный электродвигатель постоянного тока — Brushless DC electric motor
Синхронный электродвигатель с питанием от инвертора
Двигатель от 3,5-дюймового флоппи-дисковода. Катушки, расположенные радиально, изготовлены из медной проволоки с голубой изоляцией. Ротор (вверху справа) был снят и перевернут. Серое кольцо внутри чашки — это постоянный магнит. Этот конкретный двигатель является опережающим , со статором внутри ротора. Бесщеточный канальный вентилятор постоянного тока . Две катушки на печатной плате взаимодействуют с шестью круглыми постоянными магнитами в блоке вентилятора. Вентильный двигатель ( БКЭПТ или BL двигателя ), также известный как электронно — коммутируемого двигателя ( ECM или двигателем EC ) и синхронных двигателей постоянного тока , являются синхронными двигателями питание от постоянного тока (DC) электроэнергии через инвертор или импульсный источник питания , который производит электричество в виде переменного тока (AC) для управления каждой фазой двигателя через контроллер с обратной связью . Контроллер подает импульсы тока на двигатель. обмотки , управляющие скоростью и крутящим моментом двигателя. Эта система управления заменяет коммутатор (щетки), используемый во многих обычных электродвигателях.
Контроллер подает импульсы тока на двигатель. обмотки , управляющие скоростью и крутящим моментом двигателя. Эта система управления заменяет коммутатор (щетки), используемый во многих обычных электродвигателях.
Конструкция системы бесщеточного двигателя обычно аналогична синхронному двигателю с постоянными магнитами (PMSM), но также может быть переключаемым реактивным двигателем или индукционным (асинхронным) двигателем . Они также могут использовать неодимовые магниты и быть бегунками (статор окружен ротором), бегунами (ротор окружен статором) или осевыми (ротор и статор плоские и параллельные).
Преимущества бесщеточного двигателя перед щеточными двигателями — высокое отношение мощности к весу, высокая скорость, электронное управление и низкие эксплуатационные расходы. Бесщеточные двигатели находят применение в таких местах, как компьютерная периферия (дисководы, принтеры), ручные электроинструменты и транспортные средства, от моделей самолетов до автомобилей. В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы конструкцией с прямым приводом.
В современных стиральных машинах бесщеточные двигатели постоянного тока позволили заменить резиновые ремни и редукторы конструкцией с прямым приводом.
Задний план
Щеточные двигатели постоянного тока были изобретены в 19 веке и до сих пор распространены. Бесщеточные двигатели постоянного тока стали возможными благодаря развитию твердотельной электроники в 1960-х годах.
Электродвигатель развивает крутящий момент за счет смещения магнитных полей ротора (вращающейся части машины) и статора (неподвижной части машины). Один или оба набора магнитов представляют собой электромагниты , состоящие из катушки с проволокой, намотанной на железный сердечник. Постоянный ток, проходящий через обмотку провода, создает магнитное поле , обеспечивающее мощность, которая запускает двигатель. Несоосность порождает крутящий момент, который пытается перестроить поля. По мере того как ротор движется, и поля приходят в соответствие, необходимо перемещать поле ротора или статора, чтобы поддерживать несоосность и продолжать генерировать крутящий момент и движение. Устройство, которое перемещает поля в зависимости от положения ротора, называется коммутатором.
Устройство, которое перемещает поля в зависимости от положения ротора, называется коммутатором.
Щеточный коммутатор
В щеточных двигателях это делается с помощью поворотного переключателя на валу двигателя, называемого коммутатором . Он состоит из вращающегося цилиндра, разделенного на несколько металлических контактных сегментов на роторе. Сегменты подключены к обмоткам проводов на роторе. Два или более неподвижных контакта, называемые щетками , изготовленные из мягкого проводника, такого как графит , прижимаются к коммутатору, создавая скользящий электрический контакт с последовательными сегментами при вращении ротора. Щетки избирательно подают электрический ток на обмотки. Когда ротор вращается, коммутатор выбирает разные обмотки, и направленный ток прикладывается к данной обмотке, так что магнитное поле ротора остается смещенным относительно статора и создает крутящий момент в одном направлении.
Недостатки коммутатора
Коммутатор имеет недостатки, которые привели к сокращению использования щеточных двигателей. К этим недостаткам относятся:
К этим недостаткам относятся:
- Трение щеток скольжения вдоль вращающихся сегментов коллекторных вызывает потерю мощности , которые могут быть существенными в двигателе малой мощности.
- Материал мягкой щетки изнашивается из-за трения, образуя пыль, и в конечном итоге щетки необходимо заменить. Это делает коммутируемые двигатели непригодными для приложений с низким содержанием твердых частиц или герметичных устройств, таких как двигатели с жесткими дисками , а также для приложений, требующих работы без обслуживания.
- Электрическое сопротивление скользящего контакта щетки вызывает падение напряжения в цепи двигателя, называемое падением щетки, которое потребляет энергию.
- Повторяющееся резкое переключение тока через индуктивность обмоток вызывает искры на контактах коммутатора, что является опасностью возгорания во взрывоопасных средах и источником электронного шума , который может вызывать электромагнитные помехи в близлежащих микроэлектронных цепях.

В течение последних ста лет, высокая мощность DC щетки моторов, как только оплот промышленности, были заменены переменным ток (AC) синхронные двигатели . Сегодня щеточные двигатели используются только в приложениях с низким энергопотреблением или там, где доступен только постоянный ток, но вышеуказанные недостатки ограничивают их использование даже в этих приложениях.
Бесщеточный раствор
Развитие полупроводниковой электроники в 1970-х годах позволило отказаться от коммутатора в двигателях постоянного тока, а также щеток в двигателях с постоянными магнитами. В бесщеточных двигателях постоянного тока электронная сервосистема заменяет механические контакты коммутатора. Электронный датчик определяет угол ротора и управляет полупроводниковыми переключателями, такими как транзисторы, которые переключают ток через обмотки, либо меняя направление тока на противоположное, либо в некоторых двигателях выключают его, в нужное время при каждом повороте вала на 180 °, чтобы электромагниты создать крутящий момент в одном направлении.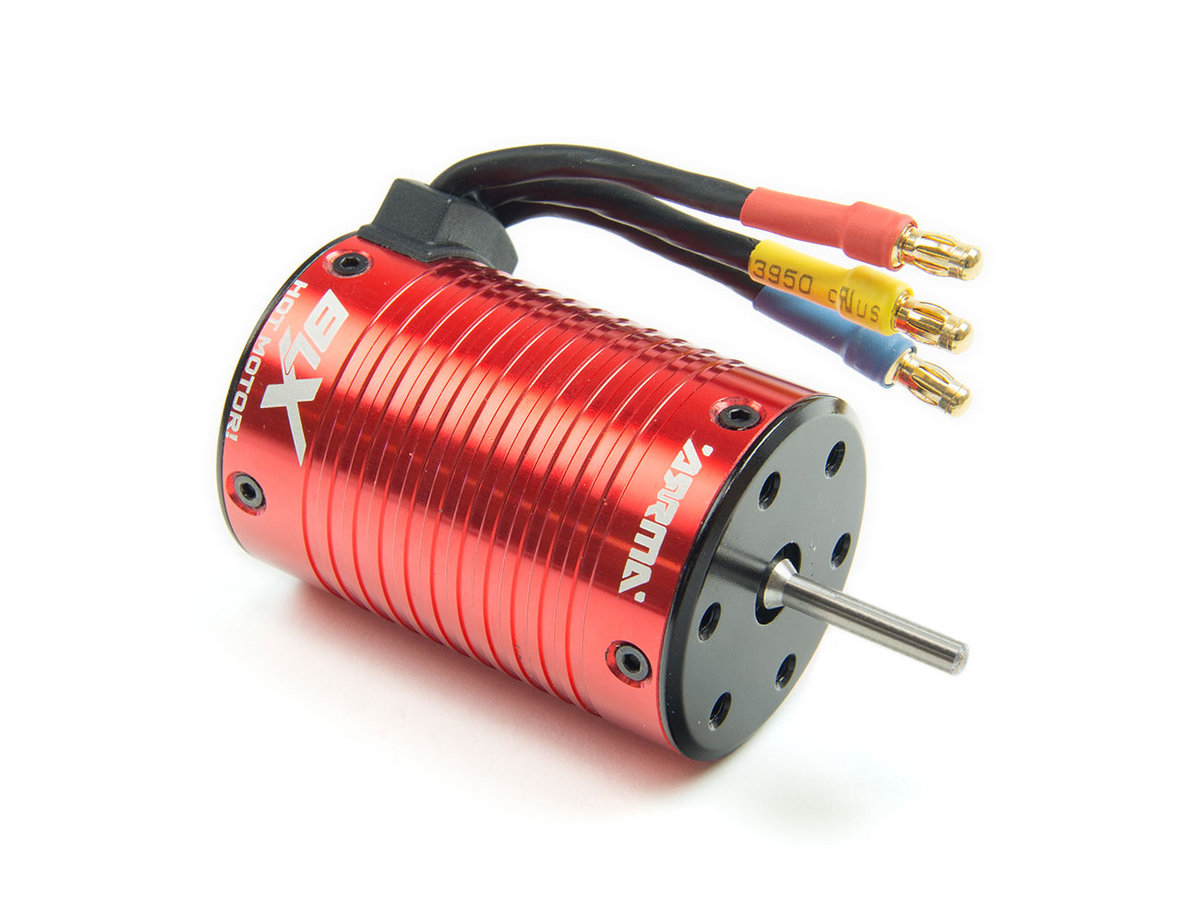 Устранение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и более длительный срок службы; их срок службы ограничен только сроком службы подшипников .
Устранение скользящего контакта позволяет бесщеточным двигателям иметь меньшее трение и более длительный срок службы; их срок службы ограничен только сроком службы подшипников .
Щеточные двигатели постоянного тока развивают максимальный крутящий момент в неподвижном состоянии, линейно уменьшающийся с увеличением скорости. Некоторые ограничения щеточных двигателей можно преодолеть с помощью бесщеточных двигателей; они включают более высокую эффективность и меньшую подверженность механическому износу. Эти преимущества достигаются за счет потенциально менее прочной, более сложной и более дорогой управляющей электроники.
Типичный бесщеточный двигатель имеет постоянные магниты, которые вращаются вокруг фиксированного якоря , что устраняет проблемы, связанные с подключением тока к движущемуся якорю. Электронный контроллер заменяет узел щеток / коллектора щеточного двигателя постоянного тока, который постоянно переключает фазу на обмотки, чтобы двигатель вращался. Контроллер выполняет аналогичное синхронизированное распределение мощности, используя твердотельную схему, а не систему щеток / коммутаторов.
Контроллер выполняет аналогичное синхронизированное распределение мощности, используя твердотельную схему, а не систему щеток / коммутаторов.
Бесщеточные двигатели обладают рядом преимуществ по сравнению с щеточными двигателями постоянного тока, включая высокое отношение крутящего момента к массе, больший крутящий момент на ватт (повышенный КПД), повышенную надежность, снижение шума, более длительный срок службы (отсутствие эрозии щеток и коллектора), устранение ионизирующих искр от коллектора, и общее снижение электромагнитных помех (EMI). При отсутствии обмоток на роторе они не подвергаются центробежным силам, а поскольку обмотки поддерживаются корпусом, они могут охлаждаться за счет теплопроводности, не требуя для охлаждения воздушного потока внутри двигателя. Это, в свою очередь, означает, что внутренние части двигателя могут быть полностью закрыты и защищены от грязи или других посторонних предметов.
Коммутация бесщеточного двигателя может быть реализована программно с использованием микроконтроллера или микропроцессорного компьютера или, альтернативно, может быть реализована с использованием аналоговых или цифровых схем. Коммутация с помощью электроники вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, включая ограничение скорости, «микрошаговый» режим для управления медленным и точным движением и удерживающий момент в неподвижном состоянии. Программное обеспечение контроллера можно настроить для конкретного двигателя, используемого в приложении, что повысит эффективность коммутации.
Коммутация с помощью электроники вместо щеток обеспечивает большую гибкость и возможности, недоступные для щеточных двигателей постоянного тока, включая ограничение скорости, «микрошаговый» режим для управления медленным и точным движением и удерживающий момент в неподвижном состоянии. Программное обеспечение контроллера можно настроить для конкретного двигателя, используемого в приложении, что повысит эффективность коммутации.
Максимальная мощность, которую можно приложить к бесщеточному двигателю, почти полностью ограничивается нагревом; слишком большое количество тепла ослабляет магниты и может повредить изоляцию обмоток.
При преобразовании электричества в механическую энергию бесщеточные двигатели более эффективны, чем щеточные. Это улучшение в значительной степени связано с частотой переключения электричества, определяемой обратной связью датчика положения. Дополнительный выигрыш связан с отсутствием щеток, что снижает потери механической энергии из-за трения. Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках бесщеточные двигатели и высококачественные щеточные двигатели сопоставимы по эффективности.
Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках бесщеточные двигатели и высококачественные щеточные двигатели сопоставимы по эффективности.
Среды и требования, в которых производители используют бесщеточные двигатели постоянного тока, включают работу, не требующую обслуживания, высокие скорости и работу, в которой искрение является опасным (например, взрывоопасная среда) или может повлиять на электронно-чувствительное оборудование.
Конструкция бесщеточного двигателя напоминает шаговый двигатель, но двигатели имеют важные отличия из-за различий в реализации и работе. В то время как шаговый двигатель часто останавливается, когда ротор находится в определенном угловом положении, бесщеточный двигатель обычно предназначен для непрерывного вращения. Оба типа двигателей могут иметь, но обычно не включают датчик положения ротора для внутренней обратной связи. В качестве шагового двигателя хорошо спроектированный бесщеточный двигатель может поддерживать конечный крутящий момент при нулевых оборотах.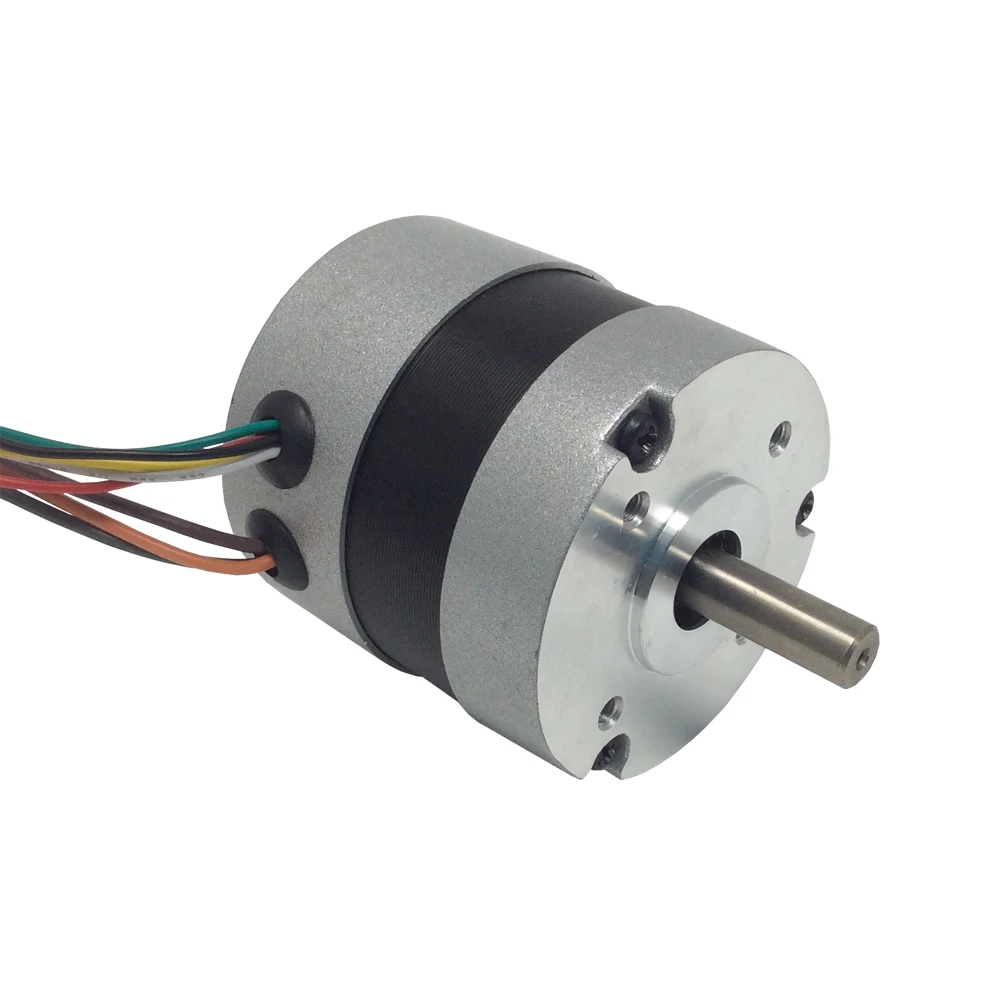
Реализации контроллера
Поскольку контроллер реализует функции традиционных щеток, ему требуется ориентация / положение ротора (относительно катушек статора ). Это происходит автоматически в щеточном двигателе из-за фиксированной геометрии вала ротора и щеток. В некоторых конструкциях используются датчики на эффекте Холла или угловой энкодер для прямого измерения положения ротора. Другие измеряют обратную ЭДС в неприводных катушках для определения положения ротора, устраняя необходимость в отдельных датчиках эффекта Холла, и поэтому их часто называют бессенсорными контроллерами.
Типичный контроллер содержит три двунаправленных выхода (т. Е. Трехфазный выход с частотным регулированием), которые управляются логической схемой. В простых контроллерах используются компараторы, чтобы определить, когда следует увеличить выходную фазу, в то время как более совершенные контроллеры используют микроконтроллер для управления ускорением, скоростью управления и точной настройки эффективности.
Контроллеры, которые определяют положение ротора на основе обратной ЭДС, имеют дополнительные проблемы при инициировании движения, поскольку обратная ЭДС не возникает, когда ротор неподвижен. Обычно это достигается путем начала вращения с произвольной фазы, а затем перехода к правильной фазе, если обнаруживается, что это неверно. Это может вызвать кратковременное вращение двигателя в обратном направлении, что еще больше усложнит последовательность запуска. Другие бессенсорные контроллеры способны измерять насыщение обмотки, вызванное положением магнитов, для определения положения ротора.
Двумя ключевыми параметрами производительности бесщеточных двигателей постоянного тока являются постоянные двигателя ( постоянная крутящего момента) и ( постоянная противо-ЭДС, также известная как постоянная скорости ). K Т {\ displaystyle K_ {T}} K е {\ displaystyle K_ {e}} K V знак равно 1 K е {\ displaystyle K_ {V} = {1 \ over K_ {e}}}
Варианты конструкции
Схема для стилей намотки треугольником и звездой. (Это изображение не иллюстрирует индуктивные и генераторные свойства двигателя)
(Это изображение не иллюстрирует индуктивные и генераторные свойства двигателя)Бесщеточные двигатели могут быть сконструированы в нескольких различных физических конфигурациях: В «традиционной» (также известной как внутренняя ) конфигурация постоянные магниты являются частью ротора. Ротор окружен тремя обмотками статора. В конфигурации внешнего ротора (или внешнего ротора) радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, который окружает сердечник. Плоский или осевой тип потока, используемый там, где есть ограничения по пространству или форме, использует пластины статора и ротора, установленные лицом к лицу. Outrunners обычно имеют больше полюсов, настроенных в тройках для поддержания трех групп обмоток, и имеют более высокий крутящий момент на низких оборотах. Во всех бесщеточных двигателях катушки неподвижны.
Существуют две распространенные конфигурации электрических обмоток; дельта-конфигурация соединяет три обмотки друг с другом ( последовательные цепи ) в треугольную схему, и питание подается на каждое из соединений. Конфигурация звезды ( Y- образной формы), иногда называемая звездообразной обмоткой, соединяет все обмотки с центральной точкой ( параллельные цепи ), и питание подается на оставшийся конец каждой обмотки.
Конфигурация звезды ( Y- образной формы), иногда называемая звездообразной обмоткой, соединяет все обмотки с центральной точкой ( параллельные цепи ), и питание подается на оставшийся конец каждой обмотки.
Двигатель с обмотками в треугольной конфигурации дает низкий крутящий момент на низкой скорости, но может дать более высокую максимальную скорость. Конфигурация звезды дает высокий крутящий момент на низкой скорости, но не такой высокой максимальной скорости.
Хотя на эффективность сильно влияет конструкция двигателя, звездообразная обмотка обычно более эффективна. В обмотках, соединенных треугольником, половина напряжения прикладывается к обмоткам, прилегающим к ведомому выводу (по сравнению с обмоткой непосредственно между ведомыми выводами), увеличивая резистивные потери. Кроме того, обмотки могут позволить паразитным электрическим токам высокой частоты полностью циркулировать внутри двигателя. Обмотка, соединенная звездой, не содержит замкнутого контура, в котором могут протекать паразитные токи, предотвращая такие потери.
С точки зрения контроллера, два стиля обмоток обрабатываются одинаково.
Приложения
Четыре полюса статора двухфазного бесщеточного двигателя. Это часть вентилятора охлаждения компьютера ; ротор был снят. Бесщеточные двигатели выполняют многие функции, которые первоначально выполнялись щеточными двигателями постоянного тока, но стоимость и сложность управления не позволяют бесщеточным двигателям полностью заменять щеточные двигатели в самых дешевых областях. Тем не менее, бесщеточные двигатели стали доминировать во многих приложениях, особенно в таких устройствах, как жесткие диски компьютеров и CD / DVD-плееры. Маленькие вентиляторы охлаждения в электронном оборудовании работают исключительно от бесщеточных двигателей. Их можно найти в беспроводных электроинструментах, где повышенная эффективность двигателя приводит к более длительным периодам использования, прежде чем потребуется зарядить аккумулятор. Низкоскоростные бесщеточные двигатели малой мощности используются в проигрывателях с прямым приводом для граммофонных пластинок .
Транспорт
Бесщеточные двигатели используются в электромобилях , гибридных автомобилях , личных транспортерах и электрических самолетах . В большинстве электрических велосипедов используются бесщеточные двигатели, которые иногда встроены в саму ступицу колеса, при этом статор жестко прикреплен к оси, а магниты прикреплены к колесу и вращаются вместе с ним. Тот же принцип применяется в самобалансирующихся колесах самоката . В большинстве моделей RC с электрическим приводом используются бесщеточные двигатели из-за их высокой эффективности.
Аккумуляторные инструменты
Бесщеточные двигатели используются во многих современных аккумуляторных инструментах, включая некоторые струнные триммеры , воздуходувки для листьев , пилы ( циркулярные или возвратно-поступательные ) и дрели / драйверы . Преимущества бесщеточных двигателей по сравнению с щеточными (малый вес, высокая эффективность) более важны для ручных инструментов с батарейным питанием, чем для больших стационарных инструментов, подключенных к розетке переменного тока, поэтому в этом сегменте рынка они стали популярнее.
Отопление и вентиляция
В сфере отопления, вентиляции и кондиционирования воздуха (ОВКВ) и холодильной промышленности существует тенденция к использованию бесщеточных двигателей вместо различных типов двигателей переменного тока . Наиболее важной причиной перехода на бесщеточный двигатель является резкое снижение мощности, необходимой для их работы, по сравнению с обычным двигателем переменного тока. В то время как двигатели с расщепленными полюсами и с постоянными разделенными конденсаторами когда-то преобладали в качестве двигателей вентиляторов, теперь многие вентиляторы работают с бесщеточными двигателями. В некоторых вентиляторах также используются бесщеточные двигатели для повышения общей эффективности системы.
В дополнение к более высокой эффективности бесщеточного двигателя, в системах отопления, вентиляции и кондиционирования воздуха (особенно в системах с регулируемой скоростью и / или модуляцией нагрузки) используются бесщеточные двигатели, поскольку встроенный микропроцессор обеспечивает возможность программирования, управления потоком воздуха и последовательной связи. Некоторые потолочные и переносные вентиляторы также оснащены этим двигателем. Они рекламируют мотор, который очень энергоэффективен и тише большинства вентиляторов.
Промышленная инженерия
Применение бесщеточных двигателей постоянного тока в промышленном строительстве в первую очередь сосредоточено на производстве или проектировании промышленной автоматизации . В производстве бесщеточные двигатели в основном используются для систем управления движением , позиционирования или приведения в действие .
Бесщеточные двигатели идеально подходят для производственных применений из-за их высокой удельной мощности, хороших характеристик крутящего момента, высокого КПД, широкого диапазона скоростей и низких эксплуатационных расходов. Чаще всего бесщеточные двигатели постоянного тока используются в промышленности: линейные двигатели, серводвигатели , приводы для промышленных роботов, приводные двигатели экструдеров и приводы подачи для станков с ЧПУ.
Системы управления движением
Бесщеточные двигатели обычно используются в качестве приводов насосов, вентиляторов и шпинделей в приложениях с регулируемой или регулируемой скоростью, поскольку они способны развивать высокий крутящий момент при хорошей скорости отклика. Кроме того, их можно легко автоматизировать для дистанционного управления. Благодаря своей конструкции они обладают хорошими тепловыми характеристиками и высокой энергоэффективностью. Для получения переменной скорости вращения бесщеточные двигатели работают в электромеханической системе, которая включает в себя электронный контроллер двигателя и датчик обратной связи по положению ротора.
Бесщеточные двигатели постоянного тока широко используются в качестве серводвигателей для сервоприводов станков. Серводвигатели используются для механического перемещения, позиционирования или точного управления движением. Шаговые двигатели постоянного тока также могут использоваться в качестве серводвигателей; однако, поскольку они работают с управлением без обратной связи , они обычно демонстрируют пульсации крутящего момента. Бесщеточные двигатели постоянного тока более подходят в качестве серводвигателей, поскольку их точное движение основано на системе управления с обратной связью, которая обеспечивает строго контролируемую и стабильную работу.
Системы позиционирования и срабатывания
Бесщеточные двигатели используются в промышленных установках для позиционирования и приведения в действие. В сборочных роботах бесщеточные шаговые двигатели или серводвигатели используются для позиционирования детали для сборки или инструмента для производственного процесса, такого как сварка или покраска. Бесщеточные двигатели также могут использоваться для привода линейных приводов.
Двигатели, которые непосредственно производят линейное движение, называются линейными двигателями . Преимуществом линейных двигателей является то , что они могут производить линейное движение без необходимости в передаче системы, такие , как ШВП , погрешности ходового винта , стойки-и-шестерни , кулачковые , зубчатые колеса или ремни, которые были бы необходимы для поворотных двигателей. Системы передачи, как известно, вызывают меньшую отзывчивость и меньшую точность. Бесщеточные линейные двигатели постоянного тока с прямым приводом состоят из статора с прорезями и магнитными зубьями и подвижного привода с постоянными магнитами и обмотками катушки. Для получения линейного движения контроллер двигателя возбуждает обмотки катушки в исполнительном механизме, вызывая взаимодействие магнитных полей, приводящее к линейному движению. Трубчатые линейные двигатели — это еще одна форма конструкции линейных двигателей, работающих аналогичным образом.
Авиамоделирование
Электродвигатель BLDC с микропроцессорным управлением, приводящий в движение микроуправляемый радиоуправляемый самолет. Этот двигатель с внешним ротором весит 5 г и потребляет около 11 Вт.Бесщеточные двигатели стали популярным выбором двигателей для авиамоделей, включая вертолеты и дроны . Их благоприятное соотношение мощности к весу и широкий диапазон доступных размеров, от менее 5 граммов до больших двигателей с выходной мощностью в несколько киловатт , произвели революцию на рынке летных моделей с электрическим приводом, вытеснив практически все щеточные электродвигатели, за исключением для недорогих, часто игрушечных самолетов малой мощности. Они также способствовали развитию простых и легких электрических моделей самолетов, а не двигателей внутреннего сгорания, которые использовались ранее для более крупных и тяжелых моделей. Увеличенное соотношение мощности к весу современных батарей и бесщеточных двигателей позволяет моделям подниматься вертикально, а не постепенно. Еще одна причина их популярности — низкий уровень шума и небольшая масса по сравнению с небольшими двигателями внутреннего сгорания на раскаленном топливе .
Законодательные ограничения на использование моделей самолетов с приводом от двигателя внутреннего сгорания в некоторых странах, чаще всего из-за потенциального шумового загрязнения — даже со специально разработанными глушителями для почти всех моделей двигателей, доступными в последние десятилетия — также поддержали переход к высокому уровню шума. -силовые электрические системы.
Радиоуправляемые автомобили
Их популярность также возросла в области радиоуправляемых автомобилей . Бесщеточные двигатели были разрешены в гонках на радиоуправляемых автомобилях в Северной Америке в соответствии с Radio Operated Auto Racing (ROAR) с 2006 года. Эти двигатели обеспечивают большую мощность для гонщиков RC и, если они соединены с соответствующей зубчатой передачей и литий-полимерным аккумулятором с высоким разрядом (Li -Po) или литий-железо-фосфатные (LiFePO4) батареи, эти автомобили могут развивать скорость более 160 километров в час (99 миль в час).
Бесщеточные двигатели способны создавать больший крутящий момент и иметь более высокую пиковую скорость вращения по сравнению с двигателями с нитро- или бензиновыми двигателями. Пиковые значения нитро-двигателей составляют около 46 800 об / мин и 2,2 кВт (3,0 л.с.), в то время как меньший бесщеточный двигатель может достигать 50 000 об / мин и 3,7 кВт (5,0 л.с.). Более крупные бесколлекторные двигатели RC могут развивать мощность до 10 киловатт (13 л.с.) и 28 000 об / мин для моделей в масштабе одной пятой.
Смотрите также
Рекомендации
дальнейшее чтение
- Яцек Ф. Гиерас; Митчелл Винг (2002), Технология двигателей с постоянными магнитами: конструкция и применение , CRC Press, ISBN 9780824743949
- Кришнан Раму (2009), синхронные и бесщеточные двигатели постоянного тока с постоянным магнитом , CRC Press, ISBN 9781420014235
- Ховард Э. Джордан (1994), Энергоэффективные электродвигатели и их применение , Springer, ISBN 9780306446986
- Бобби А. Бассхэм (2003), Оценка электродвигателей для движения судов , Военно-морская аспирантура
внешние ссылки
Бесколлекторный двигатель постоянного тока
Бесколлекторный двигатель.
Бесколлекторный двигатель – это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
Бесколлекторный двигатель
Преимущества бесколлекторного двигателя
Недостатки бесколлекторного двигателя
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями
Применение бесколлекторного двигателя
Бесколлекторный двигатель:
Бесколлекторный двигатель— это разновидность электродвигателя постоянного тока, у которого щеточно-коллекторный узел заменен полупроводниковым коммутатором, управляемым датчиком положения ротора.
Бесколлекторный двигатель также имеет и другие названия вентильный электродвигатель или шпиндельный электродвигатель.
Бесколлекторный двигатель – это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Данный тип двигателей был создан с целью улучшения свойств коллекторных электродвигателей постоянного тока.
Бесколлекторный двигатель объединяет в себе лучшие качества безконтактных двигателей и двигателей постоянного тока.
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. В коллекторном двигателе наоборот, обмотки находятся на роторе.
Преимущества бесколлекторного двигателя:
– широкий диапазон изменения частоты вращения,
– безконтактность и отсутствие узлов, требующих частого обслуживания (коллектора),
– возможность использования во взрывоопасной и агрессивной среде,
– большая перегрузочная способность по моменту,
– высокие энергетические показатели (КПД выше 90 %),
– быстрый набор максимальной скорости вращения,
– большой срок службы и высокая надёжность за счёт отсутствия скользящих электрических контактов,
– низкий перегрев электродвигателя при работе в режимах с возможными перегрузками,
– существенно более низкий уровень электромагнитных шумов по сравнению с коллекторными моторами.
Недостатки бесколлекторного двигателя:
– высокая стоимость (с учетом цены драйвера),
– невозможность использования бесколлекторного электродвигателя без драйвера даже для краткосрочного включения (например, чтобы проверить работоспособность),
– сложная структура двигателя и управление им,
– проблемный ремонт.
Преимущества бесколлекторных двигателей по сравнению с бензиновыми двигателями:
– меньше шума,
– нет выхлопа,
– хорошая приемистость,
– малая масса,
– не требуется прогрев и не надо бороться с перегревом,
– в несколько раз больший срок службы,
– не нужно частое обслуживание, инспекции и смена масла и технических жидкостей.
Применение бесколлекторного двигателя:
– бытовая и медицинская техника,
– авиамоделирование и авиастроение,
– трубозапорные приводы газо- и нефтепроводов,
– робототехника,
– судостроение,
– станки с ЧПУ,
– в компьютерном приводе,
и т.д.
Примечание: © Фото https://www.pexels.com
Найти что-нибудь еще?
Похожие записи:
карта сайта
бесколлекторный двигатель постоянного тока купить обороты своими руками
схема работа устройство мощность подключение характеристики принцип работы драйвер контроллер регулятор расчет скорости оборотов бесколлекторного двигателя своими руками
схема управление бесколлекторным двигателем постоянного тока
подключаем мощный трехфазный ардуино коллекторный и бесколлекторный двигатель разница для радиоуправляемой модели с датчиками стиральной машины
авиамодельные бесколлекторные двигатели для моделей авиамоделей алиэкспресс
квадрокоптер с бесколлекторными двигателями arduino
отличия бесколлекторных двигателей
регулятор перемотка ротор настройка регулятора бесколлекторного двигателя схема
бесколлекторный асинхронный двигатель
управление бесколлекторным двигателем arduino
мощный бесколлекторный электродвигатель постоянного тока купить трехфазный
коллекторный и бесколлекторный электродвигатель для авиамоделей своими руками
устройство бесколлекторного электродвигателя
управление бесколлекторными электродвигателями
Коэффициент востребованности 562
Бесщеточный двигатель BLDC с постоянным магнитом — ECO Transport — электрический комплект для переоборудования — Miromax
- и
- RU
- PL
- LT
- О нас
- Услуги
- Благодарности
- Фото
- Видео
- Контакты
Расширение возможностей
Авторизоваться регистр- ECO Transport
- Светодиодные дисплеи
- Светодиодные технологии
- Инфракрасный обогрев
- Регистрация
- Благодарности
- Контакты
- +370 700 30 154
- Вопрос-ответ (Ф.А.К.)
- Тележка
- Комплекты для переоборудования электричества
- Аккумуляторы
- Аксессуары
- Двигатель BLDC и аксессуары
- Электротранспорт
- Комплект для переоборудования электрического велосипеда
- Комплекты для переоборудования электрических квадроциклов
- Комплекты для переоборудования электрических мотоциклов
- Комплекты для переоборудования электромобилей
- Комплект для переоборудования электрической лодки
- Ячейки высокой мощности LiFePO4 и Li-ION 18650
- Аккумуляторы для электровелосипедов LiFePO4 и Li-ION
- Зарядное устройство
- Аккумуляторы AGM
- Для управления и контроля
- Для программирования и измерения
- Запчасти / аксессуары для электровелосипедов
- Светодиодные велосипедные фары
- Стеллажи и сумки
- Запасные части
- Бесщеточный двигатель BLDC с постоянным магнитом
- Синусоидальные контроллеры двигателей BLDC
- Контроллеры двигателей BLDC
- Аксессуары для двигателей и контроллеров BLDC
- Мотор ступицы
- Подвесные электродвигатели
Двигатели — Бесщеточные двигатели NeuMotors
В каталоге NeuMotors доступны тысячи конфигураций двигателей.Выберите из серии двигателей, перечисленных ниже, для просмотра конкретных данных двигателя.
| Серия двигателя | Вес | Вт, продолж. / Макс. | Крутящий момент / об / мин Размер смещения | Макс. | 14g | 50-100 | Очень высокая частота вращения | 100000 | н / д | 1.5 мм или 2 мм |
| 07xx | 28g | 150-300 | Очень высокая частота вращения | 90,000 | опционально | 2 мм или 3 мм | ||||
| 11xx | 200,46 | высокие обороты | 60,000 | опционально | 3,17 мм или 5 мм | |||||
| 14xx | 187 г-297 г | 450-2200 | Средне-высокие обороты | 60,000 | 9022 опционально | 60,000 | 9022 15xx |
Бесщеточные двигатели Hacker для экстремальных характеристик
Наши двигатели можно использовать в самых разных сферах.Для клиентов RC простой способ оценить потребляемую мощность — использовать 100 ватт на фунт для спортивного полета, 150 ватт на фунт для агрессивного высшего пилотажа и 200+ ватт на фунт для трехмерного полета.
| СЕРИЯ | ВАТТ. | ДИАМЕТР ДВИГАТЕЛЯ | ВЕС ДВИГАТЕЛЯ | МОТОР ПОЛЮСОВ | мм | 7,5 г | 12p | 35,000 | ||
| A10 | 55W-75W | 21 мм | 15-20g | 12p | 25,000 | 12p | 25,000 | 9014 9029 9014 9029 9014 9014 9014 9029 9014 9029 901429-78g | 10p и 14p | 30,000 |
| A30 | 250-650W | 37,2 мм | 73 — 180g | 6p и 14p | 15,000 — 45,000 | 1,200 Вт42.1 мм | 190-275 г | 8p и 14p | 15,000-40,000 | |
| A50 | 1,250-1,650W | 48,7 мм | 295-435g | 14p | 09034-129,000 | 2,300-3,300 Вт | 59 мм | 455-905g | 14p | 7,000-9,000 |
| Q80 | 2,800-7,0009 Вт5 | 610-1255g | 28p | 7,500-9,000 | ||||||
| Q100 | 7,500-11,000W | 113 мм | 1,830-2,300g | 28p | 9039 150 мм | 2,400 г | 42p | 5,500 | ||
| Q240 | ЗВОНИТЕ |
ИСПОЛЬЗУЙТЕ НАШЕ РУКОВОДСТВО ПО ДВИГАТЕЛЮ с радиоуправлением
Бесщеточный линейный двигатель— h3W Technologies
Требуемая электроника:Для двигателя требуется трехфазный бесщеточный усилитель трапециевидной или синусоидальной формы с источником питания, рассчитанным на ток и напряжение, достаточные для удовлетворения требований движения.Индуктивность катушки линейного двигателя должна быть больше минимальной индуктивности нагрузки сервоусилителя.
Условия окружающей среды:
Бесщеточный двигатель является двигателем открытого типа и не должен устанавливаться во влажной или чрезмерно грязной среде. При установке заказчиком он должен быть защищен каким-либо сильфоном или крышкой.
Монтаж:
Бесщеточный линейный двигатель должен быть установлен на плоской поверхности (лучше чем.003 «/ фут [246 мкм / м] и жесткая поверхность. Резьбовые и сквозные отверстия в узле магнита и резьбовые отверстия в узле катушки присутствуют для крепления двигателя к системе заказчика. Держатель кабеля должен быть предоставлен Заказчик должен проложить двигатель и кабель на эффекте Холла Двигатель может быть установлен в любом положении
Техническое обслуживание:
Направляющие шарикоподшипника в ступени должны периодически смазываться консистентной смазкой, рекомендованной производителем.Шкалу энкодера на открытом стекле следует время от времени протирать средством для чистки стекол, чтобы обеспечить бесперебойную работу. Установка См. Рисунок 2-1. 1. Установите магнитный узел на монтажное основание машины. 2. После снятия узла ползуна с направляющих установите блок катушки на ползун, затянув крепежные винты. 3. Поместите немагнитную прокладку поверх магнитов, размер которой должен покрывать все магниты. (Толщина прокладки должна соответствовать спецификации воздушного зазора.Нормальный воздушный зазор составляет 0,025 дюйма ± 0,005 дюйма, если не указано иное). 4. Установите и протолкните ползун по направляющим, расположив узел катушки прямо над прокладкой. (Альтернативный метод — установить салазки на набор направляющих, идентичных используемым. Прикрепите временные направляющие к системным направляющим и переместите салазки на направляющие системы.) Для любого метода чрезвычайно важно равномерно затянуть крепежные винты. Неправильная затяжка приведет к изгибу первичной или вторичной обмотки и повреждению двигателя.Если для установки узла змеевика, как описано, недостаточно места, используйте эту альтернативную процедуру. Альтернативная установка См. Рисунок 2-1. 1. Поместите немагнитную прокладку на магнитную направляющую. 2. Крепко возьмитесь за узел катушки, поместите один конец ее на прокладку и сдвиньте на место по центру магнитов. Будьте осторожны, не позволяйте магниту и катушке «хлопнуть» вместе. 3. Совместите отверстия для крепежных винтов на салазках с отверстиями на узле змеевика. 4. Свободно вверните все крепежные винты.5. Вставьте достаточное количество прокладок между ползуном и узлом змеевика, чтобы заполнить зазор. 6. Затяните все крепежные винты, чередуя систематически при затягивании, так чтобы узел катушки вытягивался равномерно, оставляя равномерный воздушный зазор между узлом катушки и магнитами. Этот воздушный зазор должен сохраняться по всей длине магнитного узла, т.е. Узел катушки никогда не должен касаться магнитов в любой точке при перемещении по длине узла магнита, и всегда должны соблюдаться спецификации воздушного зазора.7. Перед работой снимите прокладку, которая устанавливает воздушный зазор. Рисунок 2-1 Регулировка воздушного зазора
Слайд
Змеевик в сборе
Рельс
Магнит
База
Прокладка (при необходимости)
Воздушный зазор (0,03 дюйма ± 0,005 дюйма)
Операция с несколькими катушками: В дополнение к поддержанию воздушного зазора, несколько узлов змеевиков должны также поддерживать коэффициент зазора 1,8 дюйма. Другими словами, расстояние между узлами катушек может варьироваться, однако расстояние от переднего конца первого узла катушек до переднего конца следующего должно быть кратным 1.8 ”. См. Рисунок 2-2. Убедитесь, что это расстояние установлено во время установки. Рисунок 2-2 Узлы из нескольких катушекРельс
Магнит в сборе
База
Змеевик в сборе
Кабель
n (1,8 дюйма)
Рекомендации по эксплуатации: Двигатель всегда должен работать в указанных пределах рабочих параметров. Превышение этих пределов приведет к необратимому повреждению двигателя. Пределы рабочих параметров см. В технических характеристиках двигателя.Двигатель никогда не должен касаться магнитов во время работы. См. «Регулировка воздушного зазора». Перед работой снимите прокладку, которая устанавливает воздушный зазор между двигателем и магнитами. Примечание: имейте в виду, что общая нагрузка на подшипник включает силу магнитного притяжения. Для обеспечения безопасной и правильной работы необходимо выполнить следующие шаги. 1. Убедитесь, что вся электрическая проводка и кабели правильно подключены. Для получения этой информации см. Руководство, прилагаемое к устройству управления. 2. Отрегулируйте предел постоянного тока управления в соответствии со спецификациями постоянного тока двигателя.3. Отрегулируйте ток сервопривода в соответствии с текущими характеристиками двигателя. 4. См. Рабочие параметры в технических характеристиках двигателя. При необходимости отрегулируйте параметры управления в соответствии со спецификациями данных двигателя. 5. Отрегулируйте регулятор для правильного P.I.D. настройка петли. Начните с низкого уровня усиления и увеличивайте его по мере необходимости. AY1763A00 Соединение с отводомКабель двигателя | Холл Кабель | Ограничительный кабель | |||||
Название сигнала | Цвет провода | Название сигнала | Цвет провода | Название сигнала | Цвет провода | ||
LinDrive | Ловушка | ||||||
Фаза двигателя A (U) | Красный | Черный | Зал 1 | Белый | Предел + Выход | Белый | |
Фаза двигателя B (V) | Белый | Красный | Зал 2 | Красный | Предел — Выход | Красный | |
Фаза двигателя C (Вт) | Черный | Белый | Зал 3 | Черный | Домашний выход | Черный | |
Моторная земля | зеленый | Холл Граунд | зеленый | Limit и Home PWR * | коричневый | ||
Термовыключатель + | Синий | Холл + 5В постоянного тока | коричневый | Limit и Home GND | зеленый | ||
Термовыключатель — | оранжевый |
Модульная магнитная дорожка:
Установка См. Рисунок 2-3.Некоторые магниты поставляются в виде модульных сегментов. Это рекомендуемая процедура для установки этих модульных секций магнитопровода.
Примечание. Рекомендуется использовать ручки с резиновым покрытием, чтобы уменьшить травмы (защемление пальцев и т. Д.) И защитить поверхность магнитов.
1. Прикрутите узел катушки к нижней части салазок (каретки). Убедитесь, что провода выходят в правильном направлении.
2. Установите магнитную дорожку на опорную плиту рядом с линейным подшипником или между ними.Концы магнитной дорожки не должны противопоставляться друг другу. Поместите немагнитную прокладку толщиной 0,025 ± 0,005 дюйма на магнитную направляющую. Толщина прокладки должна быть равна рекомендуемому воздушному зазору (расстояние между узлом катушки и магнитной дорожкой).
Рисунок 2-3 Установка модульной магнитной направляющей
Слайд
Змеевик в сборе
Рельс
Установите одну секцию магнитопровода
Переместите ползун в эту сторону после установки змеевика
3.Крепко возьмитесь за ползун и переместите его над магнитной направляющей / прокладкой.
Примечание: ползун будет с силой притягиваться к направляющей магнита и может выйти за пределы направляющих, если не будет удерживаться крепко. Проверьте зазор между прокладкой и узлом змеевика. Если пространство между прокладкой и узлом катушки велико, равномерно ослабьте крепежные винты, чтобы узел змеевика был полностью и равномерно опущен на прокладку.
Вставьте другую прокладку достаточной толщины, чтобы заполнить зазор между узлом катушки и ползуном, см. Рисунок 2-4.
Еще раз затяните крепежные винты.
Рисунок 2-4 Регулировка воздушного зазора
Слайд
Змеевик в сборе
Рельс
Магнит
База
Прокладка (при необходимости)
Воздушный зазор (0,30 + — 0,005)
4. Установите оставшиеся секции магнитной направляющей на опорную плиту. См. Рисунок 2-5.5. Перед использованием снимите регулировочную шайбу воздушного зазора с магнитной направляющей.
Рисунок 2-5 Установка модульной магнитной направляющей
Установите другую часть магнитной направляющей, расположив ползун, как показано.
Направляющая
Рекомендации по эксплуатации:
Двигатель всегда должен работать в указанных пределах рабочих параметров.Превышение этих пределов приведет к необратимому повреждению двигателя. Пределы рабочих параметров см. В технических характеристиках двигателя. Двигатель никогда не должен касаться магнитов во время работы.
Воздушный зазор должен сохраняться на всем протяжении пути.
Перед работой снимите прокладку, которая устанавливает воздушный зазор между двигателем и магнитами.
Примечание: имейте в виду, что общая нагрузка на подшипник включает силу магнитного притяжения.
Для обеспечения безопасной и правильной работы необходимо выполнить следующие шаги.
1. Убедитесь, что вся электрическая проводка и кабели правильно подключены. Для получения этой информации см. Руководство, прилагаемое к устройству управления.
2. Отрегулируйте ток сервопривода в соответствии с текущими характеристиками двигателя.
3. См. Рабочие параметры в технических характеристиках двигателя. При необходимости отрегулируйте параметры управления в соответствии со спецификациями данных двигателя.
4. Отрегулируйте регулятор для правильного P.I.D. настройка петли. Начните с низкого уровня усиления и увеличивайте его по мере необходимости.
5. Перед работой снимите напряжение с проводов.
AY1763A00 Подключение отвода:
Кабель двигателя | Холл Кабель | Ограничительный кабель | |||||
Название сигнала | Цвет провода | Название сигнала | Цвет провода | Название сигнала | Цвет провода | ||
LinDrive | Ловушка | ||||||
Фаза двигателя A (U) | Красный | Черный | Зал 1 | Белый | Предел + Выход | Белый | |
Фаза двигателя B (V) | Белый | Красный | Зал 2 | Красный | Предел — Выход | Красный | |
Фаза двигателя C (Вт) | Черный | Белый | Зал 3 | Черный | Домашний выход | Черный | |
Моторная земля | зеленый | Холл Граунд | зеленый | Limit и Home PWR * | коричневый | ||
Термовыключатель + | Синий | Холл + 5В постоянного тока | коричневый | Limit и Home GND | зеленый | ||
Термовыключатель — | оранжевый |
Бесщеточный линейный сервомотор без зубцов
1.Установите катушку и магнит в сборе. При установке катушки обязательно отрегулируйте узел катушки так, чтобы он находился по центру в узле магнита с равным воздушным зазором в вертикальном и горизонтальном положениях. См. Рисунок 2-6.
2. Убедитесь, что узел катушки центрирован внутри узла магнита с одинаковым воздушным зазором в вертикальном и горизонтальном положениях на всем протяжении его хода. Блок катушки никогда не должен касаться
магниты в любой точке от одного конца пути до другого.
Примечание. При модульном монтаже магнитов магниты монтируются встык без промежутков. Схема монтажных отверстий повторяется, и на нее не влияют магнитные сегменты. Рисунок отверстий повторяется на стыке концов магнитов.
Работа с несколькими катушками
В дополнение к поддержанию воздушного зазора, несколько узлов змеевиков должны также поддерживать коэффициент интервала 2,4 дюйма. Другими словами, расстояние между узлами катушек может варьироваться, однако расстояние от переднего конца первого узла катушек до переднего конца следующего должно быть кратным 2.4 ”. См. Рисунок 2-6.
Убедитесь, что этот коэффициент установлен во время установки
Рисунок 2-6 Расстояние между воздушными зазорами
Змеевик в сборе
Горизонтальный воздушный зазор
Вертикальный воздушный зазор
Вертикальный воздушный зазор
Монтажная пластина
Горизонтальный воздушный зазор
Магнит в сборе
Основание станка
Рекомендации по эксплуатации
Двигатель всегда должен работать в указанных пределах рабочих параметров.Превышение этих пределов приведет к необратимому повреждению двигателя.
Двигатель никогда не должен касаться магнитов во время работы. Должен соблюдаться равный горизонтальный и вертикальный воздушный зазор. Перед работой снимите прокладку, которая устанавливает воздушный зазор между двигателем и магнитами. Примечание: имейте в виду, что общая нагрузка на подшипник включает силу магнитного притяжения. Следующие шаги должны быть
завершено для обеспечения безопасной и правильной работы.