Бесколлекторные двигатели | Stepmotor
Преимущества бесколлекторных двигателей
Все БД имеют высокий срок службы механических элементов. Достигнуть этого позволила ось, зафиксированная на шарикоподшипниках, исключившая из конструкции какие-либо трущийся друг об друга элементы.
Размагничивание магнитов в бесколлекторных двигателях происходит крайне медленно и составляет не более 1% в 10 лет. Таким образом вывести силовую остановку из строя можно только при перепаде напряжения в контроллере. Избежать данного развития событий позволяет защита по току в контроллере.
1. Долгий срок службы
Высокий срок службы силовой установки данного типа обусловлен неизменным режимом работы на высокой скорости. Кроме того отсутствие какого-либо трения деталей, а следовательно и отсутствие стачивания и нарушения механизмов работы положительно влияют на работу силовой установки бесколлекторного типа.
2. Высокая надежность
Срок работы бесколлекторный двигателей различного типа составляет от 20,000 часов.
3. Повышенное быстродействие, динамичность
4. Высокая точность позиционирования
5. Низкие перегревы при перегрузках
6. Пониженный уровень электромагнитных шумов
7. Высокая перегрузочная способность по моменту
8. Возможность изменения частоты вращения в широком диапазоне
9. Линейные загрузочные характеристики
Недостатки: управление бесколлекторным двигателем
Управление бесколлекторным двигателем обуществляет специальный электронный блок управления, который также называют регулятором. Он позволяет осуществлять управление оборотами двигателя, подавать напряжение и настроить вращение силовой установки.
Как правило, именно регулятор бесколлекторного двигателя «забирает» на себя основную стоимость силовой установки.
Бесколлекторные двигатели имеют достаточно сложную конструкцию, поэтому любой БД, в том числе трехфазовый (наиболее часто использующийся в производстве), имеет сложный процесс управления.
Устройство БД
В зависимости от месторасположения магнитов в силовой установке существует два типа электродвигателей: «Инраннер» – с магнитами, расположенными во внутренней части, и «Аутраннер» – с магнитами во внешней части, которые вращаются во внешней плоскости статора и обмотки.
В зависимости от требующихся характеристик в электродвигателе применяется одна или другая схема бесколлекторного двигателя. Если у двигателя малое количество полюсов и высокие обороты, то используют схему работы «Инраннер». В этом типе схемы электродвигатель одновременно выполняет функцию корпуса: поэтому непосредственно на него могут быть зафиксированы крепежные элементы.
Если у двигателя малое количество полюсов и высокие обороты, то используют схему работы «Инраннер». В этом типе схемы электродвигатель одновременно выполняет функцию корпуса: поэтому непосредственно на него могут быть зафиксированы крепежные элементы.
В съеме бесколлекторного двигателя «Аутраннер» предполагаются невысокие обороты и высокий момент. Вращение в конструкции осуществляет внешняя часть. Закрепить данный тип электродвигателя можно при помощи деталей статора или за незадействованную во вращении осевую часть.
Фазы бесколлекторных двигателей
Фаза бесколлекторного двигателя обеспечивает плавность вращения магнитного поля, чем больше фаз – она же является обмоткой электродвигателя – тем более плавно осуществляется вращение. Как правило, используются трехфазовые бесколлекторные двигатели, однако существуют и одно- и двух- и четырехфазовые силовые установки. Чем больше обмотки – тем выше сложность, но и лучше показатель эффективности.
Распространенность трехфазовых электродвигателей обусловлена соотношением их эффективности к значению сложности. Обычные трехфазовые бесколлекторные двигатели имеют три провода, если же это электродвигатель с датчиками положения, то для них используется еще один комплект состоящий из пяти проводов.
Обычные трехфазовые бесколлекторные двигатели имеют три провода, если же это электродвигатель с датчиками положения, то для них используется еще один комплект состоящий из пяти проводов.
Напряжение подается на две обмотки из трех, тем самым создается шесть путей подачи напряжения на обмотки. Шаг поворота составляет 60 градусов.
Бесколлекторные двигатели с датчиками положения
Если в конструкции используются нагрузки на валу установки, то следует использовать двигатель с датчиком положения. Все электродвигатели в области подъемных механизмов, а также в электротранспорте должны быть оснащены датчиками положения.
Стоит помнить, что если в конструкции при старте должны быть полностью исключены колебания оси двигателя (вращения), то обойтись без датчиков положения в силовой установке не удастся. Наиболее распространенными датчиками движения в электродвигателе являются датчики, работа которых основана на эффекте Холла. Расположение датчиков должно способствовать воздействию магнитов ротора, угол между датчиками составляет 120 градусов (электро).
Датчики положения могут быть расположены как внутри так и снаружи силовой установки. Это позволяет в некоторых случаях самостоятельно дооснастить бесколлекторные электродвигатели без встроенных датчиков положения дополнительно этими внешними датчиками.
В некоторых случаях требуется чтобы датчики работали в режиме реверса, т.е. вращались в обратном направлении, для этого следует использовать дополнительный комплект датчиков перемещения. Чтобы они заработали в режиме реверса следует настроить их на обратный ход.
Применение бесколлекторных электродвигателей
Основным преимуществом БД является отсутствие нагрева и шума во время работы и это при высокой производительности. В первую очередь бесколлекторные двигателя используются в медицинском оборудовании. Большинство современного стоматологического оборудования работает именно с помощью бесколлекторный электродвигателей, поскольку в этой области возможно использовать только тихие высокопроизводительные электромоторы без нагрева.
Наружная реклама: рекламные щиты, витрины, банеры-жалюзи с изменяющимися изображениями используют в своей конструкции бесколлекторные двигатели. В этом случае БД применяются для автоматической работы банеров и вращения конструкций.
Электронное автомобильное оборудование также не обходится без бесколлекторных двигателей. Электростеклоподъемники, «дворники» или электростеклоочистители, омыватели фар и электрорегуляторы кресел также работают при помощи БД.
Отдельно отметим нефтегазовую промышленность, в которой силовые элементы в запорном оборудовании не могут обойтись без БД, поскольку только они гарантированно не имеют искрообразующие части, использовать которые категорически запрещено в данном типе производства.
Купить бесколлектроные двигатели
Мы делаем производство простым в управлении и надежным! Бесколлекторные двигатели подходят как для автоматизации крупных производств, так и любителей электроуправляемых моделей, собрать которые можно в домашних условиях.
Наш Торговый Дом занимается розничными и оптовыми продажами мотор редукторов, шаговых двигателей, линейных двигателей, цилиндрических мотор редукторов, а также бесколлекторных двигателей. Мы осуществляем полный цикл продажи от первичной консультации по требующемуся оборудованию до ее внедрения и установки на вашем производстве.
Мы всегда готовы предоставить вам бесплатную подробную консультацию по новинкам, появившимся на рынках мира, и подобрать для вас подходящий вариант силовой установки или другого оборудования. Мы работаем с самыми крупными поставщиками из Азии, Европы и СНГ, поэтому предлагаем для вас самые доступные цены на силовое оборудование.
Если вы хотите купить бесколлекторный двигатель для робототехники или автоматического управления, то можете оставить запрос на сайте Торгового Дома «Степмотор» или связаться с нами по бесплатному номеру телефона по России: 8 800 5555 068.
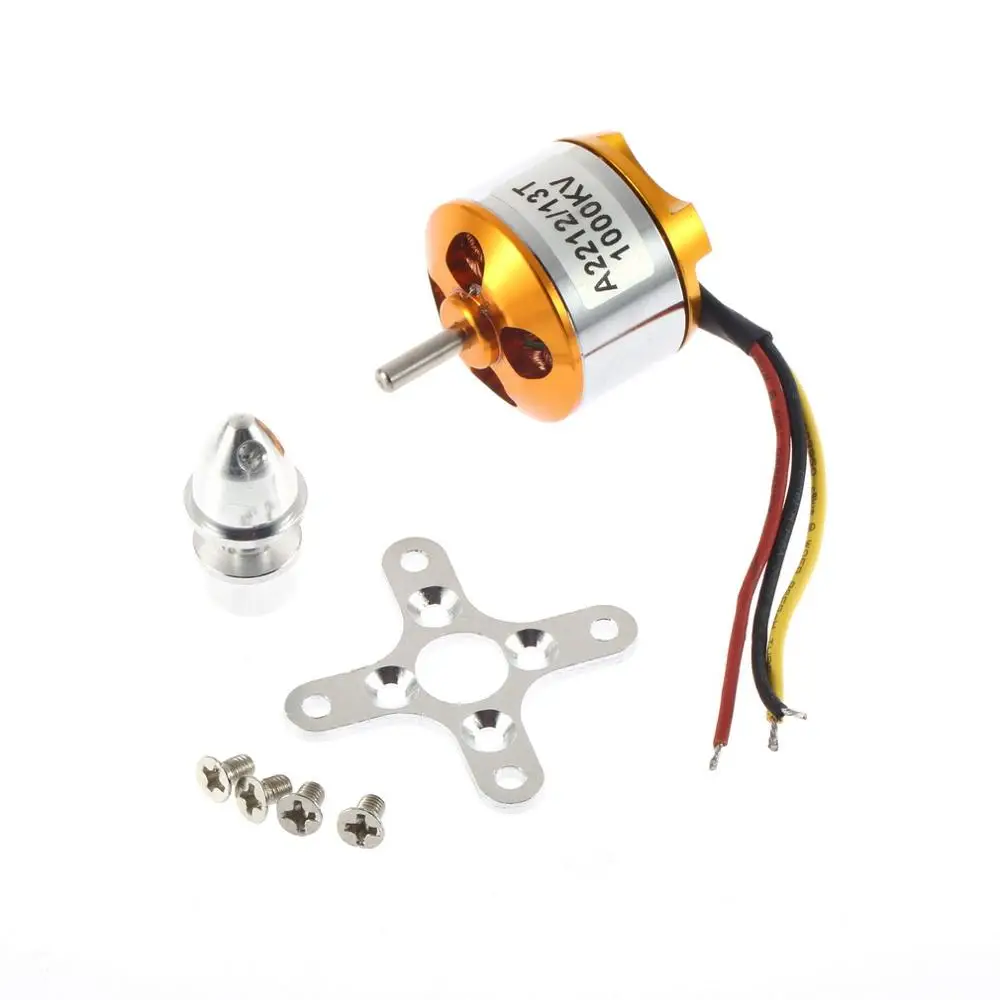
Emax CF2822 1200KV Бесколлекторный мотор с пропсейвером за 990р на fixfly.
 ru
ruПрофессиональные консультации. Обращайтесь.
Проверяем все модели перед отправкой.
Описание
Доставка и оплата
Описание
Производитель: Emax
Питание: 2-3S Li-Po
KV: 1200
Максимальная эффективность: 82%
Ток при максимальной эффективности: 7-16A (>75%)
Ток холостого хода / 10В: 0.9 A
Предельно допустимый ток: 16 A / 60с
Сопротивление: 150 МОм
Диаметр вала: 3 мм
Рекомендуемый вес модели: 200-600г
Комплект поставки:
1 x Мотор Emax CF2822 1200KV
1 x Пропсейвер
Калькулятор моторов, ESC, лопастей.
Москва. Варианты доставки:
Стоимость доставки одной единицы товара. Стоимость доставки нескольких единиц смотрите в корзине.
Курьерская доставка СДЭК. Строго в пределах МКАД. Доставка с 10 до 18. Срок доставки 1-4 рабочих дня.
397p
Варианты оплаты:
Картами Visa, Mastercard и Мир. В том числе Сбербанк Онлайн, Альфа-Клик, ВТБ24-Онлайн, PSB On-Line, Русский Стандарт.
Наличными в магазине, курьеру, в пунктах выдачи.
Этот товар можно купить только в магазине по адресу Санкт-Петербург, пр.Стачек, д.72. ДК Газа правый вход.
Мы не можем отправить его курьером или в пункты выдачи заказов.
Сastle Creations 1406 сенсорный 4-полюсной бесколлекторный мотор 540T (4600kV/ 2-3SLiPo/диаметр вала: 3.7мм) артикул CSE-060-0056-00
Сastle Creations 1406 сенсорный 4-полюсной бесколлекторный мотор (4600kV) — Сочетает в себе сенсорную технологию (Сastle Smart Sense). Входящее напряжение: 2-3SLiPo, диаметр вала: 3.7мм, разъёмы — бананы 4 мм.,длина 49,5 мм., диаметр 36 мм., вес 197 гр.
СastleCreations 1406 сенсорный 4-полюсной бесколлекторный мотор — оснащен сенсорной технологией (СastleSmartSense), которая считывает положение ротора.
Данная технология позволяет добиться очень плавного старта, делает мотор более высокопроизводительным, а также мотор имеет очень точный и плавный отклик на малых оборотах, больше крутящего момента. Благодаря Castle Smart Sense технологии исключаются удары и дергание мотора во время резкого запуска – это позволяет добиться очень точного и плавного контроля по газу, продлевает ресурс двигателя.
Эффективность
Данный мотор может выдавать большую эффективность без перегрева, это способствует применению больших передаточных чисел без ущерба двигателю. Большая эффективность позволяет использовать меньше ресурсов аккумулятора при этом выдавая столько же мощности, что увеличивает время запуска на одном аккумуляторе. Высокая эффективность мотора, означает, что меньше энергии уйдёт в тепло, даже при больших нагрузках мотор не будет горячим.
Надёжность
Надёжность двигателя нельзя проигнорировать. Без надёжной конструкции на высокой эффективности далеко не уедешь. Инженеры Сastle Creations знают это и не продешевили, когда разрабатывали конструкцию нового мотора, который должен быть по вкусу всем искушенным моделистам. Мотор получил усиленные подшипники больших размеров, систему демпфирования вибраций. Высокая прочность, высокотемпературные неодимовые закалённые магниты в дополнении с обмоткой из кевларовой нити обеспечивают целостность ротора во всех режимах суровой эксплуатации. Статор выполнен таким образом, чтобы обеспечивать самый эффективный теплоотвод для большего срока службы мотора. Каждый компонент мотора подбирается с помощью тщательного тестирования. В конце концов вы получаете самый непревзойдённый, высокопроизводительный двигатель высокого качества с высокой эффективностью.
Статор выполнен таким образом, чтобы обеспечивать самый эффективный теплоотвод для большего срока службы мотора. Каждый компонент мотора подбирается с помощью тщательного тестирования. В конце концов вы получаете самый непревзойдённый, высокопроизводительный двигатель высокого качества с высокой эффективностью.
Особенности модели:
- 4 полюса и 12 магнитов обеспечивают исключительную эффективность и меньший нагрев системы;
- Увеличенные, позолоченные площадки контактов обеспечивают меньшее сопротивление;
- QUIETSENSE™технология экранирует магнитное поле генерируемое мотором и обеспечивает бесперебойную работу тандема из мотора и регулятора;
- Более эффективный старт;
- Оптимизированная конструкция, с которой вам больше не нужно настраивать тайминги;
- Сенсор позволяет регулятору автоматически подбирать нужные тайминги на всех режимах езды;
- Модульная конструкция;
- Закалённые 1800 неодимовые магниты;
- Высококачественные термостойкие датчики;
- Высококачественный силовой кабель сечением 13AWG;
- Кевларовая обмотка ротора;
- Вал из закалённой стали.

Внимание! Внешний вид товара, комплектация и характеристики могут изменяться производителем без предварительных уведомлений. Данный интернет-сайт носит исключительно информационный характер и ни при каких условиях не является публичной офертой, определяемой положениями Статьи 437 (2) Гражданского кодекса Российской Федерации.
Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса
Когда я начал разрабатывать блок управления бесколлекторным двигателем (мотор-колесом), было много вопросов о том, как сопоставить реальный двигатель с абстрактной схемой из трех обмоток и магнитов, на которой, как правило, все объясняют принцип управления бесколлекторными двигателями.
Когда я реализовал управление по датчикам Холла я еще не очень понимал, что происходит в двигателе дальше абстрактных трех обмоток и двух полюсов: почему 120 градусов и почему алгоритм управления именно такой.
Все встало на место, когда я начал разбираться в идее бездатчикового управления бесколлекторным двигателем — понимание процесса, происходящего в реальной железке, помогло разработать аппаратную часть и понять алгоритм управления.
Ниже я постараюсь расписать свой путь к пониманию принципа управления бесколлекторным двигателем постоянного тока.
Для работы бесколлекторного двигателя необходимо чтобы постоянное магнитное поле ротора увлекалось за вращающемся электромагнитным полем статора, как и в обычном ДПТ.
Вращение магнитного поля статора осуществляется коммутацией обмоток с помощью электронного блока управления.
Конструкция бесколлекторного двигателя схожа с конструкцией синхронного двигателя, если подключить бесколлекторный двигатель в трехфазную сеть переменного тока, удовлетворяющую электрическим параметрам двигателя, он будет работать.
Определенная коммутация обмоток бесколлекторного двигателя позволяет управлять им от источника постоянного тока. Чтобы понять, как составить таблицу коммутаций бесколлекторного двигателя необходимо рассмотреть управление синхронной машиной переменного тока.
Синхронная машина
Синхронная машина управляется от трехфазной сети переменного тока. Двигатель имеет 3 электрические обмотки, смещенные между собой на 120 электрических градусов.
Запустив трехфазный двигатель в генераторном режиме, постоянным магнитным полем будет наводиться ЭДС на каждую из обмоток двигателя, обмотки двигателя распределены равномерно, на каждую из фаз будет наводиться синусоидальное напряжение и данные сигналы будут смещены между собой на 1/3 периода (рисунок 1). Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2П(360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них.
При подаче на двигатель трехфазного напряжения в каждый момент времени на каждой обмотке будет некое значение силы тока.
Рисунок 1. Вид сигнала трехфазного источника переменного тока.
Каждая обмотка формирует вектор магнитного поля пропорциональный току на обмотке. Сложив 3 вектора можно получить результирующий вектор магнитного поля. Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Так как с течением времени ток на обмотках двигателя меняется по синусоидальному закону, меняется величина вектора магнитного поля каждой обмотки, а результирующий суммарный вектор меняет угол поворота, при этом величина данного вектора остается постоянной.
Рисунок 2. Один электрический период трехфазного двигателя.
На рисунке 2 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 3).
Рисунок 3. Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Вдоль каждой из фаз построен вектор магнитного поля, создаваемый обмоткой двигателя. Направление вектора определяется направлением постоянного тока в обмотке, если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Величина вектора пропорциональна величине напряжения на фазе в данный момент.
Чтобы получить результирующий вектор магнитного поля необходимо сложить данные вектора по закону сложения векторов.
Аналогично построение для второго и третьего моментов времени.
Рисунок 4. Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа).
Так, с течение времени, результирующий вектор плавно меняет свое направление, на рисунке 5 изображены получившиеся вектора и изображен полный поворот магнитного поля статора за один электрический период.
Рисунок 5. Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя.
За этим вектором электрического магнитного поля увлекается магнитное поле постоянных магнитов ротора в каждый момент времени (рисунок 6).
Рисунок 6. Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором.

Так работает синхронная машина переменного тока.
Имея источник постоянного тока необходимо самостоятельно формировать один электрический период со сменой направлений тока на трех обмотках двигателя. Поскольку бесколлекторный двигатель по конструкции такой же, как синхронный, в генераторном режиме имеет идентичные параметры, необходимо отталкиваться от рисунка 5, где изображено сформированное вращающееся магнитное поле.
Постоянное напряжение
Источник постоянного тока имеет только 2 провода «плюс питания» и «минус питания» это значит, что есть возможность подавать напряжение только на две из трех обмоток. Необходимо аппроксимировать рисунок 5 и выделить все моменты, при которых возможно скоммутировать 2 фазы из трех.
Число перестановок из множества 3 равняется 6, следовательно, имеется 6 вариантов подключения обмоток.
Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться далее пока не дойдет до конца периода и не начнет сначала.
Электрический период будем отсчитывать от первого вектора.
Рисунок 7. Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток.
На рисунке 5 видно, что при управлении трехфазным синусоидальным напряжением имеется множество векторов плавно проворачивающихся с течением времени, а при коммутации постоянным током возможно получить вращающееся поле только из 6 векторов, то есть переключение на следующий шаг должно происходить каждые 60 электрических градусов.
Результаты из рисунка 7 сведены в таблицу 1.
Таблица 1. Полученная последовательность коммутаций обмоток двигателя.
| Плюс питания | Минус питания | Обмотка не подключена |
| W | U | V |
| W | V | U |
| U | V | W |
| U | W | V |
| V | W | U |
| V | U | W |
Вид получившегося управляющего сигнала в соответствии с таблицей 1 изображен на рисунке 8. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания.
Рисунок 8. Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза W, синий – U, красный – V.
Однако реальная картина с фаз двигателя будет похожа на синусоидальный сигнал из рисунка 1. У сигнала образуется трапециевидная форма, так как в моменты, когда обмотка двигателя не подключена, постоянные магниты ротора наводят на нее ЭДС (рисунок 9).
Рисунок 9. Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме.
На осциллографе это выглядит так:
Рисунок 10. Вид окна осциллографа при измерении одной фазы двигателя.
Конструктивные особенности
Как было сказано ранее за 6 переключений обмоток формируется один электрический период 360 электрических градусов.
Необходимо связать данный период с реальным углом вращения ротора. Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
Двигатели с одной парой полюсов и трехзубым статором применяются крайне редко, двигатели имеют N пар полюсов.
На рисунке 11 изображены модели двигателя с одной парой полюсов и с двумя парами полюсов.
а. б.
Рисунок 11. Модель двигателя с одной (a) и с двумя (б) парами полюсов.
Двигатель с двумя парами полюсов имеет 6 обмоток, каждая из обмоток парная, каждая группа из 3 обмоток смещена между собой на 120 электрических градусов. На рисунке 12б. отложен один период для 6 обмоток. Обмотки U1-U2, V1-V2, W1-W2 соединены между собой и в конструкции представляют 3 провода вывода фаз. Для простоты рисунка не отображены соединения, но следует запомнить, что U1-U2, V1-V2, W1-W2 одно и то же.
На рисунке 12, исходя из данных таблицы 1, изображены вектора для одной и двух пар полюсов.
а. б.
б.
Рисунок 12. Схема векторов магнитного поля для двигателя с одной (a) и с двумя (б) парами полюсов.
На рисунке 13 изображены вектора, созданные 6 коммутациями обмоток двигателя с одной парой полюсов. Ротор состоит из постоянных магнитов, за 6 шагов ротор провернется на 360 механических градусов.
На рисунке обозначены конечные положения ротора, в промежутках между двумя соседними положениями ротор проворачивается от предыдущего к следующему скоммутированному состоянию. Когда ротор достигает данного конечного положения, должно происходить следующее переключение и ротор будет стремиться к новому заданному положению, так чтобы его вектор магнитного поля стал сонаправлен с вектором электромагнитного поля статора.
Рисунок 13. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с одной парой полюсов.

В двигателях с N парами полюсов необходимо пройти N электрических периодов для полного механического оборота.
Двигатель с двумя парами полюсов будет иметь два магнита с полюсами S и N, и 6 обмоток (рисунок 14). Каждая группа из 3 обмотки смещены друг относительно друга на 120 электрических градусов.
Рисунок 14. Конечные положения ротора при шестиступенчатой коммутации бесколлекторного двигателя с двумя парами полюсов.
Определение положения ротора бесколлекторного двигателя
Как было сказано ранее для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют электронный блок управления.
Отслеживание положения ротора возможно несколькими способами:
1. По датчикам Холла
По датчикам Холла
2. По обратной ЭДС
Как правило, датчиками Холла производители оснащают двигатель при выпуске, поэтому это самый распространённый метод управления.
Коммутирование обмоток в соответствии с сигналами обратной ЭДС позволяет отказаться от датчиков встроенных в двигатель и использовать в качестве датчика анализ свободной фазы двигателя, на которую будет наводиться магнитным полем противо-ЭДС.
Управление бесколлекторным двигателем с датчиками Холла
Чтобы коммутировать обмотки в нужные моменты времени необходимо отслеживать положение ротора в электрических градусах. Для этого применяются датчики Холла.
Поскольку имеется 6 состояний вектора магнитного поля необходимо 3 датчика Холла, которые будут представлять один абсолютный датчик положения с трехбитным выходом. Датчики Холла устанавливаются также как обмотки, смещенные между собой на 120 электрических градусов. Это позволяет использовать магниты ротора в качестве воздействующего элемента датчика.
Рисунок 15. Сигналы с датчиков Холла за один электрический оборот двигателя.
Для вращения двигателя необходимо чтобы магнитное поле статора опережало магнитное поле ротора, положение, когда вектор магнитного поля ротора сонаправлен с вектором магнитного поля статора является конечным для данной коммутации, именно в этот момент должно происходить переключение на следующую комбинацию, чтобы не давать ротору зависать в стационарном положении.
Cопоставим сигналы с датчиков Холла с комбинацией фаз которые необходимо скоммутировать (таблица 2)
Таблица 2. Сопоставление сигналов датчиков Холла с коммутацией фаз двигателя.
| Положение двигателя | HU(1) | HV(2) | HW(3) | U | V | W |
| 0 | 0 | 0 | 1 | 0 | — | + |
| 1 | 0 | 1 | + | — | 0 | |
| 1 | 0 | 0 | + | 0 | — | |
| 1 | 1 | 0 | 0 | + | — | |
| 0 | 1 | 0 | — | + | 0 | |
| 360/N | 0 | 1 | 1 | — | 0 | + |
При равномерном вращении двигателя с датчиков поступает сигнал смещенный на 1/6 периода, 60 электрических градусов (рисунок 16).
Рисунок 16. Вид сигнала с датчиков Холла.
Управление с помощью сигнала обратной ЭДС
Существуют бесколлекторный двигатели без датчиков положения. Определение положения ротора осуществляется с помощью анализа сигнала ЭДС на свободной фазе двигателя. В каждый момент времени к одной из фаз подключен «+» к другой «-» питания, одна из фаз остается свободной. Вращаясь, магнитное поле ротора наводит ЭДС в свободной обмотке. По мере вращения напряжение на свободной фазе изменяется (рисунок 17).
Рисунок 17. Изменение напряжения на фазе двигателя.
Сигнал с обмотки двигателя разбит на 4 момента:
1. Обмотка подключена к 0
2. Обмотка не подключена (свободная фаза)
3. Обмотка подключена к питающему напряжению
4. Обмотка не подключена (свободная фаза)
Сопоставив сигнал с фаз с управляющим сигналом, видно, что момент перехода на следующее состояние можно детектировать пересечением средней точки (половины питающего напряжения) с фазой, которая в данный момент не подключена (рисунок 18).
Рисунок 18. Сопоставление управляющего сигнала с сигналом на фазах двигателя.
После детектирования пересечения необходимо выдержать паузу и включать следующее состояние. По данному рисунку составлен алгоритм переключений состояний обмоток (таблица 3).
Таблица 3. Алгоритм переключения обмоток двигателя
| Текущее состояние | U | V | W | Следующее состояние |
| 1 | — | Ожидание пересечения средней точки из + в — | + | 2 |
| 2 | Ожидание пересечения средней точки из — в + | — | + | 3 |
| 3 | + | — | Ожидание пересечения средней точки из + в — | 4 |
| 4 | + | Ожидание пересечения средней точки из — в + | — | 5 |
| 5 | Ожидание пересечения средней точки из + в — | + | — | 6 |
| 6 | — | + | Ожидание пересечения средней точки из — в + | 1 |
Пересечение средней точки проще всего детектировать компаратором, на один вход компаратора подается напряжение средней точки, а на второй текущее напряжение фазы.
Рисунок 19. Детектирование средней точки компаратором.
Компаратор срабатывает в момент перехода напряжения через среднюю точку и генерирует сигнал для микроконтроллера.
Обработка сигнала с фаз двигателя
Однако сигнал с фаз при регулировании скорости ШИМ отличается видом, и имеет импульсный характер (рисунок 21), в таком сигнале невозможно детектировать пересечение со средней точкой.
Рисунок 20. Вид сигнала фазы при регулировании скорости ШИМ.
Поэтому данный сигнал следует отфильтровать RC фильтром чтобы получить огибающую, а так же разделить под требования компаратора. По мере увеличения скважности шим сигнал будет возрастать по амплитуде (рисунок 22).
Рисунок 21. Схема делителя и фильтра сигнала с фазы двигателя.
Рисунок 22.
 Огибающая сигнала при изменении скважности ШИМ.
Огибающая сигнала при изменении скважности ШИМ.Схема со средней точкой
Рисунок 23. Вид виртуальная средней точки. Картинка взята с avislab.com/
С фаз снимаются сигналы через токограничительные резисторы и объединяются, получается вот такая картина:
Рисунок 24. Вид осциллограммы напряжения виртуальной средней точки.
Из-за ШИМ, напряжение средней точки не постоянно, сигнал так же необходимо фильтровать. Напряжение средней точки после сглаживания будет достаточно большим (в районе питающего напряжения двигателя), его необходимо разделить делителем напряжения до значения половины питающего напряжения.
После прохождения сигнала через фильтр колебания сглаживается и получается ровное напряжение относительно которого можно детектировать пересечение обратной ЭДС.
Рисунок 26. Напряжение после делителя и фильтра низких частот.

Средняя точка будет менять свое значение в зависимости от напряжения (скважности ШИМ), так же как и огибающая сигнала.
Полученные сигналы с компараторов заводятся на микроконтроллер, который их обрабатывает по алгоритму выше.
Пока на этом все.
Mercury STAR 200EM — встраиваемый бесколлекторный электрический микромотор с фиброоптикой в комплекте с платой управления и шлангом
Доброе утро! Скажите, пожалуйста, подойдёт ли этот микромотор к стоматологической установке MERCURY 4800?
Татьяна , 30.09.2021
Татьяна, здравствуйте! Да, подойдет: он универсальный.
StomShop.pro, 30.09.2021
Доброе утро! Скажите, пожалуйста, подойдёт ли этот микромотор к стоматологической установке CHIRANA SMILI MINI.2? И ещё подойдет ли к микромотору наконечник КМИЗ прямой — НПМ 40-02?
Спасибо.
Мадина Гасанова, 26.08.2021
Данный микромотор универсальный, для установки потребуется инженер, который умеет монтировать китайские микромоторы в европейские стоматологические установки. Наконечник прямой НПМ 40-02 подходит к данному микромотору.
Наконечник прямой НПМ 40-02 подходит к данному микромотору.
StomShop.pro, 27.08.2021
Можно ли встроить в установку Premier?
Евгений, 11.08.2021
Электрический микромотор Mercury STAR 200EM можно встроить практически в любую установку. С установками Premier совместим точно.
StomShop.pro, 12.08.2021
Какая минимальная скорость вращения?
Нияз Галявутдинов, 13.02.2021
Здравствуйте! Скорость вращения: от 2 000 до 40 000 оборотов в минуту.
StomShop.pro, 14.02.2021
Здравствуйте, какой вес самого мотора? Спасибо.
Алексей, 11.09.2020
Здравствуйте! 90 грамм.
StomShop.pro, 15.09.2020
Этот мотор с подсветкой или нет? В описании написано что нет подсветки. У нас наконечники с фиброоптикой.
Михаил , 23. 07.2020
07.2020
Здравствуйте! Mercury STAR 400EM – это встраиваемый бесколлекторный электрический микромотор с фиброоптикой.
StomShop.pro, 24.07.2020
Здравствуйте. Подойдет этот микромотор для S-Max M95L — повышающий угловой наконечник с оптикой, 1:5 | NSK Nakanishi (Япония)? Спасибо.
ИРИНА, 22.07.2020
Здравствуйте! Да, наконечник S-Max M95L 1:5 подойдёт к данному микромотору.
StomShop.pro, 23.07.2020
Какая гарантия на него?
Ильсия , 25.12.2019
Здравствуйте! 12 месяцев.
StomShop.pro, 26.12.2019
Данный микромотор с внутренним охлаждением? Спасибо.
Геннадий, 13.10.2019
Здравствуйте! Да, в Mercury STAR 400EM предусмотрено внутреннее охлаждение.
StomShop.pro, 14.10.2019
Как работают бесщеточные двигатели — HPI Racing
HPI с гордостью представляет флюс № 1151 Бесщеточная система для всех стилей электромобилей на радиоуправлении! Первое Система Flux идеально подходит для туристических автомобилей, багги и грузовики, способные легко разогнать ваш автомобиль или грузовик до скорости почти 50 миль в час с правильной передачей и аккумулятором!
Бесщеточная система Flux включает бесщеточный
электронный регулятор скорости и бесщеточный двигатель Warp 5700. К
сделать так, чтобы вам было легко добавить невероятный прирост скорости к любому
электромобиль, багги или грузовик, вы можете получить бесщеточную систему Flux
в удобном комбо паке, артикул 1151!
К
сделать так, чтобы вам было легко добавить невероятный прирост скорости к любому
электромобиль, багги или грузовик, вы можете получить бесщеточную систему Flux
в удобном комбо паке, артикул 1151!
Warp 5700 — лучший выбор почти для всех масштабов 1/10 электрические туристические автомобили, багги и грузовики.Вы можете ехать очень быстро гоняй по трассе и получай невероятную скорость с одним и тем же мотором! Со стандартной 6-элементной батареей NiMH или 2S LiPo (7,4 В) вы можете разогнаться до 40 миль в час только со стандартной передачей! Когда настроен правильно, Warp 5700 — это эквивалент высокого качества Щеточный двигатель на 9 или 10 витков с 6 батареями NiMH — a очень мощный мотор!
# 100419 Флюс Warp 5700Kv Бесщеточный двигатель» href = «/ assets / images / kits / 10554 / warp5700.jpg»>Характеристики Warp 5700:
- Мощный высокоскоростной бесщеточный двигатель — эквивалент 9.5 ‘ щеточный мотор
- Превосходное сочетание огромной мощности и необыкновенного эффективность
- Тот же размер, что и стандартный двигатель типоразмера 540
- Элегантный корпус из анодированного алюминия в черный цвет
- Конструкция без обслуживания
- Наружные выступы под пайку для легкой замены проводов
- Прецизионные шарикоподшипники увеличенного размера для длительного срока службы
- Высокотемпературный неодимовый ротор с высоким крутящим моментом
- Бесшумная конструкция статора обеспечивает плавный линейный крутящий момент
- Простой 4-точечный монтаж для удобной установки
- Более длительное время работы по сравнению с аналогичным щеточным двигателем
- Легко ремонтируется с помощью подшипников и ротора.
 заменяемый пользователем
заменяемый пользователем - Совместим с любым бездатчиковым ESC
# 100419 Искривление флюса 5700 кВ Бесщеточный двигатель
Бесщеточный электронный регулятор скорости Motiv работает как «мозги» комбинации мощности Flux.Он имеет простой плагин возможность подключения к моторной серии Motiv, настоящая батарея Дина разъемы для передачи мощности с нулевыми потерями и длинного переключателя и провода приемника, чтобы вы могли установить его в любом месте вашего грузовика или автомобиля. Благодаря способности работать с двигателями различных размеров, у вас есть возможность установки батарей NiMH различного размера и различных типов LiPo аккумуляторы, чтобы получить максимальную отдачу от вашей бесщеточной системы Flux! Он небольшой по размеру, но огромен по мощности! Вы можете даже получите ссылку на предстоящее управление HPI, чтобы запрограммировать Motiv ESC с вашего компьютера!
# 100416 Флюкс Мотив Бесщеточный ESC » href = «/ assets / images / kits / 10554 / motiv. jpg «>
jpg «>Характеристики регулятора скорости Flux Motiv:
- Бесщеточный / матовый спидометр заднего хода с программируемым реверсом локаут для гонок
- Малый размер: 46 x 36 x 23 мм (1,8 дюйма x 1,4 дюйма x 0,9 дюйма)
- Чрезвычайно легкий вес: 62,4 г (2,2 унции)
- LiPo программируемая отсечка низкого напряжения **
- Высокопроизводительный алюминиевый радиатор с поперечной резкой
- Пропорциональное торможение для отличной управляемости при отключенной мощности
- Огромный объем непрерывной работы с мощностью (70 А * непрерывный / Импульсный ток 380А)
- Плавный запуск и работа с бездатчиковыми двигателями (Патенты В ожидании) Штекер аккумулятора
- Authentic Dean для надежной защиты от потерь соединение
- Долговечный выключатель
- Простое начальное программирование
- Возможность простой регулировки параметров спидометра с помощью кабеля HPI link (не входит в комплект)
- До 8 элементов NiMH (9.
 6) или 2S LiPo совместимость с 5700Kv
двигатель, до 12 элементов NiMH (14,4 В) или 3S LiPo с двигателем 4600 кВ
6) или 2S LiPo совместимость с 5700Kv
двигатель, до 12 элементов NiMH (14,4 В) или 3S LiPo с двигателем 4600 кВ - Управляет бесщеточными и стандартными щеточными двигателями (программа ESC для тип двигателя, который вы используете)
* 25 ° C, минимальный расход воздуха 5 миль в час через радиатор. Лопаться
ток: продолжительность <2 секунд, рабочий цикл 1%.
** ESC должен быть запрограммирован на отключение лития при использовании лития.
батареи.
# 100416 Flux Motiv Бесщеточный ESC
Бесщеточная система Flux # 1151 Ответ HPI любителям и гонщикам, которым нужен мощный, универсальный и доступная бесщеточная моторная система.Варп-двигатели чрезвычайно мощный, очень прочный и очень эффективный, чтобы доставить вам иду по дороге к победе! Двигатели HPI Warp — бессенсорные. двигателей, поэтому меньше проводов, о которых нужно беспокоиться, и меньше хлопот для тебя. Вы можете приобрести Motiv ESC и Warp мотор в комплекте, либо купить их по отдельности, чтобы оборудовать все ваши электромобили бесщеточными власть!
Владельцы Flux Motiv могут обновить свои спидометры с помощью удобного
ссылка на компьютер и бесплатное скачивание ПО! Программисты
постоянное обновление программного обеспечения, загруженного в Flux
Motive Speedo, и вы можете не отставать от них, приобретя ПК HPI
Комплект для программирования USB. Этот комплект позволяет подключить спидометр.
прямо на ваш ПК с Windows, чтобы сохранить настройки профиля, настроить
гоночные профили, обновите программное обеспечение спидометра и многое другое!
Этот комплект позволяет подключить спидометр.
прямо на ваш ПК с Windows, чтобы сохранить настройки профиля, настроить
гоночные профили, обновите программное обеспечение спидометра и многое другое!
Бесщеточная система Flux может работать с широким спектром двигателей и типы батарей — убедитесь, что вы используете правильный комбинация!
1. При оснащении двигателем Flux Warp 5700 или другими двигателями
с мощностью 5700 кВ вы можете использовать до 8 никель-металлгидридных элементов или 2S LiPo
аккумулятор.
2. При оснащении двигателем мощностью 4600 кВ вы можете использовать до
12 никель-металлгидридных элементов или батарея 3S LiPo.
Термин «Kv» обозначает количество оборотов в минуту. (Об / мин), которую двигатели будут пытаться выдавать на каждый приложенный вольт (v), и — стандартный термин для обозначения мощности бесщеточного двигателя. Вы можете найти буквы в различных комбинациях, таких как «кв», «кв» или «кв», но это в контексте бесщеточных двигателей понимается, что, однако, это все это означает одно и то же!
В наличии отдельно!
Flux Warp 5700Kv и Motive ESC также доступны отдельно. так что вы можете запрыгнуть на другие автомобили и грузовики!
так что вы можете запрыгнуть на другие автомобили и грузовики!
# 100416 Flux Motiv Бесщеточный
ESC
# 100419 Flux Warp 5700Kv Бесщеточный
Двигатель
# 1151 Flux Brushless System (с Motiv
ESC и мотор Warp 5700)
Во-первых, как работают щеточные двигатели
Чтобы узнать, почему бесщеточные двигатели такие эффективные и мощные, нужно
помогает узнать, как работают стандартные щеточные двигатели.
В обычном электродвигателе RC, например, в том, что вы найдете в
автомобиль Sprint 2 или грузовик E-Firestorm, вы найдете два провода
(положительный и отрицательный), которые связаны с определенными точками в
концевик мотора, два изогнутых постоянных магнита внутри корпуса
или «банка» двигателя, и вращающийся вал с намотанными проводами
вокруг него, который спускается к центру мотора. Вал и
соединенные вместе провода известны как «якорь» двигателя, а при
на одном конце крепится ведущая шестерня двигателя — на другом
конец — это медная секция, она называется «коммутатором».
Прикосновение к коммутатору для передачи электроэнергии на арматура — две «щетки». Как видно из диаграммы выше, провода, идущие от спидометра, подводят питание к щеткам, которые физически контактируют с коммутатором, превращая якорь в основной электромагнит при подаче электричества.
Как вращается стандартный двигатель
Когда на электромагнит подается питание, один конец становится
северный «полюс», а другой становится южным полюсом.Поскольку
северный полюс любого магнита автоматически отталкивается от северного
полюс другого магнита, якорь двигателя захочет вращаться, чтобы его
северный полюс обращен к южному полюсу постоянных изогнутых магнитов
установлен внутри корпуса двигателя. Когда арматура вращается, чтобы сделать
северный / южный полюса встречаются, электрический заряд, приложенный к
якорь переворачивается, поэтому полюса снова отталкиваются друг от друга и
они заставляют арматуру вращаться, вращая ведущую шестерню и вашу машину
или трансмиссия грузовика. Большинство электродвигателей имеют три полюса.
вместо двух — это предохраняет аккумулятор от короткого замыкания,
снижает эффективность, а также предотвращает попадание двигателя
застрял в одном положении.
Большинство электродвигателей имеют три полюса.
вместо двух — это предохраняет аккумулятор от короткого замыкания,
снижает эффективность, а также предотвращает попадание двигателя
застрял в одном положении.
Ограничения стандартных двигателей
Ограничения щеточных двигателей разъясняются, когда вам необходимо
получить от них огромное количество мощности и скорости. Потому что кисти
должен постоянно находиться в физическом контакте с коммутатором,
от них возникает значительное трение, особенно на высоких скоростях.Любой дефект коллектора заставляет щетки подпрыгивать и
теряют контакт, что снижает эффективность двигателя. Вот почему гонщики
правда, коммутатор их гоночных двигателей почти после каждого запуска,
почти так же часто меняют щетки мотора. Есть также
значительный электрический шум, создаваемый неэффективными цепями,
коллектор и щетки со временем изнашиваются, что требует
замена деталей мотора, или всего дела.
Теперь, как работают бесщеточные двигатели
Основное объяснение конструкции бесщеточного двигателя состоит в том, что
он похож на щеточный мотор, за исключением того, что все «наизнанку»
а кистей нет вообще. Постоянные магниты, которые
обернуть якорь в обычном двигателе вместо этого
вокруг вала двигателя, и этот узел называется ротором. В
катушки с проволокой расположены вокруг внутренней части корпуса двигателя, что делает несколько
разные магнитные полюса. В сенсорном бесщеточном двигателе есть
датчики на роторе, которые отправляют сигналы обратно на электронную скорость
контроль.
Постоянные магниты, которые
обернуть якорь в обычном двигателе вместо этого
вокруг вала двигателя, и этот узел называется ротором. В
катушки с проволокой расположены вокруг внутренней части корпуса двигателя, что делает несколько
разные магнитные полюса. В сенсорном бесщеточном двигателе есть
датчики на роторе, которые отправляют сигналы обратно на электронную скорость
контроль.
Почему бесщеточные двигатели намного эффективнее, чем
щеточные двигатели
Кроме шарикоподшипников, на которых вращается ротор, нет
физическое соединение вообще, автоматически делая бесщеточный
двигатель более эффективен и долговечен, потому что нет
трение щеток и коллектора.Имея компьютер (
speedo) контроль вращения ротора также значительно увеличивается
эффективность. Также нет искры от щеток к коммутатору, поэтому
электрические помехи резко снижаются, и, наконец,
катушки намного легче сохранять в холодном состоянии, что повышает эффективность даже
дальше.
Есть ли недостатки у бесщеточного
моторы?
Единственный возможный недостаток системы бесщеточного двигателя — это
повышенная начальная стоимость, однако любой, кто знаком с обслуживанием
мощные, сильно изношенные щеточные двигатели будут знать, что вы
быстро увидеть значительную экономию, потому что вы не будете заменять
моторные щетки, щеточные пружины, якоря или целые моторы. ..КОГДА-ЛИБО!
..КОГДА-ЛИБО!
Насколько бесщеточные двигатели могут быть дешевле стандартных
моторы?
Стоимость гонок на щеточном моторе типичного туристического автомобиля может увеличиться.
до 3-5 евро за цикл, если вы заменяете щетки каждый раз, когда
сделать 5-минутную гонку. Добавьте к стоимости различные пружины (четыре
пары пружин по 3 евро за пару), токарный коммутатор по цене более 90
Евро, алмазный наконечник для токарного станка более 50 евро, затем дополнительно
аккумулятор для токарного станка, и у вас есть гоночный счет на
ваши руки!
Бесщеточные двигатели действительно нет
поддержание’?
Да! Они настолько экономят время, что гонщики по всему миру имеют
заново открыл для себя радость веселья в зоне ямы.Они нет
им больше не приходится иметь дело со всем, что они раньше делали со своими
моторы между гонками: снятие мотора, разборка, связь
правка, замена щеток, повторная сборка, обкатка и, наконец,
переустановка … на это уходит довольно много времени и денег
каждый гоночный день!
Единственная возможная потребность в обслуживании — это хорошо используемые
бесщеточные двигатели, для которых может потребоваться очистка или замена подшипников. Однако это бывает редко, поэтому даже не должно быть.
классифицируется как регулярное техническое обслуживание.
Однако это бывает редко, поэтому даже не должно быть.
классифицируется как регулярное техническое обслуживание.
Почему бессенсорное?
Помимо базовых размеров и разницы в мощности, бесщеточные двигатели
Доступны два основных типа: сенсорный и бессенсорный. Сенсорный
в двигателях используются очень маленькие датчики на роторе, а также дополнительный набор
тонкие провода, которые соединяют двигатель со спидометром, в дополнение к
три толстых провода, которые дают двигателю мощность. Дополнительные провода
сообщить спидометру положение якоря двигателя, когда он вращается,
сотни раз в секунду. Это дает огромное количество данных
к спидометру, и «мозг» спидометра принимает эти данные и
объединяет его с входом газа от радиосистемы, чтобы сделать
мотор вращается максимально плавно и эффективно.Все это
делает отличную систему для гонщиков высшего уровня, но делает
спидометры и моторы немного дороже и немного сложнее
установить и использовать.
Бессенсорная бесщеточная система, как нетрудно догадаться, не имеет
эти датчики и лишние провода, и якорь мотора раскручивается без
передавая его точную точность обратно на спидометр каждую миллисекунду. Это упрощает изготовление двигателя и спидометра, упрощает его изготовление.
установить, легче настроить и дешевле в целом. Бессенсорная система
обеспечивает ту же мощность, что и сенсорный тип, только с
чуть меньше точности — идеально подходит для спортивных гонщиков, в целом
любители и почти все, кто не хардкор,
путешествующий по миру гонщик.
Это упрощает изготовление двигателя и спидометра, упрощает его изготовление.
установить, легче настроить и дешевле в целом. Бессенсорная система
обеспечивает ту же мощность, что и сенсорный тип, только с
чуть меньше точности — идеально подходит для спортивных гонщиков, в целом
любители и почти все, кто не хардкор,
путешествующий по миру гонщик.
В HPI решили, что нашим клиентам почти никогда не понадобится точность, доступная от сенсорных систем, и мы выбран для использования популярной бессенсорной бесщеточной системы для Flux серии.
Мы надеемся, что эта бесщеточная грунтовка для двигателей все, что вам нужно знать о том, почему бесщеточная система HPI Flux лучший выбор для вас! По мере расширения линейки Flux вы будете возможность получить больший выбор для всех ваших потребностей в скорости электрического тока!
Произошла ошибка
Повторите попытку позже или попробуйте нашу домашнюю страницу еще раз.
Bitte versuchen Sie es später oder schauen Sie ob die Homepage funktioniert.
Ошибка: E1020
Австралия Электронная почта
Максон Мотор Австралия Пти Лтд
Unit 1, 12-14 Beaumont Road
Гора Куринг-Гай Новый Южный Уэльс 2080
Австралия
Benelux Электронная почта
maxon motor benelux B.V.
Йосинк Колквег 38
7545 PR Enschede
Нидерланды
Китай Электронная почта
Максон Мотор (Сучжоу) Ко., Лтд
江兴东 路 1128 号 1 号楼 5 楼
215200 江苏 吴江
中
Германия Электронная почта
максон мотор гмбх
Truderinger Str. 210
81825 München
Deutschland
Индия Электронная почта
maxon precision motor India Pvt.ООО
Niran Arcade, № 563/564
Новая Бел-Роуд,
RMV 2-я ступень
Бангалор — 560 094
Индия
Италия Электронная почта
maxon motor italia S. r.l.
r.l.
Società Unipersonale
Via Sirtori 35
20017 Rho MI
Италия
Япония Электронная почта
マ ク ソ ン ジ ャ パ ン 株式会社
東京 都 新宿 区 新宿 5-1-15
〒 160-0022
日本
Корея Электронная почта
㈜ 맥슨 모터 코리아
서울시 서초구
반포 대로 14 길 27, 한국 137-876
Португалия Электронная почта
maxon motor ibérica s.а
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Швейцария Электронная почта
максон мотор аг
Брюнигштрассе 220
Постфах 263
6072 Sachseln
Schweiz
Испания Электронная почта
maxon motor ibérica s.a. Испания (Барселона)
C / Polo Norte № 9
28850 Торрехон-де-Ардос
Испания
Тайвань Электронная почта
maxon motor Тайвань
8F. -8 №16, переулок 609 сек. 5
-8 №16, переулок 609 сек. 5
П. 5, Chongxin Rd.
Sanchong Dist.
Нью-Тайбэй 241
臺灣
Великобритания, Ирландия Электронная почта
максон мотор великобритания, лтд
Maxon House, Hogwood Lane
Finchampstead
Беркшир, RG40 4QW
Соединенное Королевство
США (Восточное побережье) Электронная почта
высокоточные двигатели maxon, inc.
125 Девер Драйв
Тонтон, Массачусетс 02780
США
США (Западное побережье) Электронная почта
высокоточные двигатели maxon, inc.
1065 East Hillsdale Blvd,
Люкс 210
Фостер-Сити, Калифорния 94404
США
Франция Электронная почта
максон Франция
201 — 715 rue du Chat Botté
ZAC des Malettes
01700 Beynost
Франция
Все бесщеточные двигатели постоянного тока | Portescap
Технология Portescap BLDC Motor продолжает выдвигать кривую высокой производительности как в щелевых, так и в бесщеточных двигателях постоянного тока без паза. Благодаря исключительному крутящему моменту и скорости, более высокому КПД и размерам корпуса, подходящим для ваших нужд, бесщеточные двигатели постоянного тока удовлетворяют даже самым строгим требованиям. Бесщеточный двигатель постоянного тока обеспечивает превосходное управление скоростью и положением, длительный срок службы и высокую плотность крутящего момента. В бесщеточных электрических бесщеточных двигателях постоянного тока используется цилиндрическая катушка без железа, изготовленная по той же технологии намотки, что и в двигателях постоянного тока без железа, а в бесщеточных двигателях постоянного тока с прорезями используются статоры, изготовленные по новейшим технологиям в ламинировании и обмотках.Оба имеют электронную коммутацию и имеют 3 фазы обмотки. Наши бесщеточные двигатели постоянного тока с прорезями производятся в США и предназначены для хирургических силовых устройств с критическими характеристиками, а также предлагают возможности стерилизации.
Благодаря исключительному крутящему моменту и скорости, более высокому КПД и размерам корпуса, подходящим для ваших нужд, бесщеточные двигатели постоянного тока удовлетворяют даже самым строгим требованиям. Бесщеточный двигатель постоянного тока обеспечивает превосходное управление скоростью и положением, длительный срок службы и высокую плотность крутящего момента. В бесщеточных электрических бесщеточных двигателях постоянного тока используется цилиндрическая катушка без железа, изготовленная по той же технологии намотки, что и в двигателях постоянного тока без железа, а в бесщеточных двигателях постоянного тока с прорезями используются статоры, изготовленные по новейшим технологиям в ламинировании и обмотках.Оба имеют электронную коммутацию и имеют 3 фазы обмотки. Наши бесщеточные двигатели постоянного тока с прорезями производятся в США и предназначены для хирургических силовых устройств с критическими характеристиками, а также предлагают возможности стерилизации.
Мы также предлагаем оптимизированную линейку бесщеточных двигателей постоянного тока / миниатюрных бесщеточных двигателей Ultra EC, разработанных в Швейцарии. Это семейство небольших двигателей постоянного тока помогает удовлетворить широкий спектр конкретных требований к крутящему моменту и скорости, обеспечивая при этом снижение потерь в стали, повышение эффективности и охлаждение.
Это семейство небольших двигателей постоянного тока помогает удовлетворить широкий спектр конкретных требований к крутящему моменту и скорости, обеспечивая при этом снижение потерь в стали, повышение эффективности и охлаждение.
Наши бесщеточные двигатели постоянного тока исключительно хорошо работают в средах, требующих точности и долговечности. Уникальная конструкция двигателя BLDC дает несколько ключевых преимуществ:
- Диаметр от 12,7 мм
- Скорость до 100000 об / мин
- Высокая эффективность движения
- Способность противостоять суровым условиям
- Увеличенный срок службы мотора
- Высокое ускорение
- Высокое соотношение мощности и веса
- Стерилизация (доступна в исполнении с прорезями)
Не знаете, как выбрать правильный бесщеточный двигатель и нужен ли вам двигатель с прорезями или без слота? Нажмите на наши обзорные ресурсы ниже.
Как работает бесщеточный электродвигатель?
В статье «Как работают электродвигатели» объясняется, как работают щеточные электродвигатели . В типичном двигателе постоянного тока имеются постоянные магниты снаружи и вращающийся якорь внутри. Постоянные магниты неподвижны, поэтому их называют статором . Якорь вращается, поэтому его называют ротором .
Якорь содержит электромагнит . Когда вы пропускаете электричество в этот электромагнит, он создает магнитное поле в якоре, которое притягивает и отталкивает магниты в статоре.Таким образом, якорь вращается на 180 градусов. Чтобы он продолжал вращаться, вам нужно поменять полюса электромагнита. Щетки справляются с этим изменением полярности. Они входят в контакт с двумя вращающимися электродами, прикрепленными к якорю, и меняют магнитную полярность электромагнита во время его вращения.
Эта установка работает, проста и дешева в изготовлении, но имеет много проблем:
- Щетки со временем изнашиваются.
- Поскольку щетки замыкают / разрывают соединения, возникают искры и электрические шумы.
- Щетки ограничивают максимальную скорость двигателя.
- Электромагнит в центре двигателя затрудняет охлаждение.
- Использование щеток ограничивает количество полюсов якоря.
С появлением дешевых компьютеров и силовых транзисторов стало возможным «вывернуть двигатель наизнанку» и избавиться от щеток. В бесщеточном двигателе постоянного тока (BLDC) вы помещаете постоянные магниты на ротор и перемещаете электромагниты к статору. Затем вы используете компьютер (подключенный к мощным транзисторам) для зарядки электромагнитов при вращении вала.Эта система имеет множество преимуществ:
- Поскольку компьютер управляет двигателем, а не механическими щетками, он более точен. Компьютер также может включить в уравнение скорость двигателя. Это делает бесщеточные двигатели более эффективными.
- Отсутствие искрения и гораздо меньший электрический шум.
- Нет щеток, подверженных износу.
- Электромагниты на статоре очень легко охлаждают.
- На статоре можно установить много электромагнитов для более точного управления.
Единственным недостатком бесщеточного двигателя является его более высокая начальная стоимость, но вы часто можете окупить эту стоимость за счет большей эффективности в течение срока службы двигателя.
Для получения дополнительной информации о бесщеточных двигателях перейдите по следующим ссылкам.
Огромный выбор, на складе в Анахайме, Калифорния, готов к отправке! Покупайте и просматривайте оптовые скидки в Интернете — гарантия высокого качества по непревзойденной цене! Нужен нестандартный двигатель BLDC? Мы можем настроить требования к напряжению, току, скорости, модификации вала и многое другое! Свяжитесь с нами, чтобы обсудить вашу заявку. Идеально подходит для остановок и непрерывной работы , таких как насосы, конвейеры, инструменты, вентиляторы и многое другое. Бесщеточные конструкции обеспечивают высокую скорость, длительный срок службы и высокую удельную мощность. по доступной цене. Щелкните здесь, чтобы узнать больше о бесщеточных двигателях.Бесщеточные двигатели постоянного тока используются в самых разнообразных отраслях промышленности , включая, но не ограничиваясь:
Рекомендуемый бесщеточный двигатель постоянного тока серииЧасто задаваемые вопросы ► Что такое бесщеточные двигатели постоянного тока?Бесщеточные двигатели постоянного тока или «двигатели BLDC» — это синхронные электродвигатели, работающие от постоянного напряжения (постоянного тока).Они имеют электронную коммутацию без щеток, отсюда и название «бесщеточные двигатели». Бесщеточные двигатели постоянного тока состоят из фиксированного якоря и вращающихся постоянных магнитов, датчиков Холла, обмоток статора, северного и южного магнита ротора, магнитов датчика Холла, вспомогательного вала и ведущего конца вала. ► Как работают бесщеточные двигатели постоянного тока?Бесщеточные двигатели постоянного тока имеют электронную систему коммутации, без щеток и механических коммутаторов. Это позволяет бесщеточным электродвигателям работать на более высоких скоростях, чем их щеточные аналоги.Также у каждого двигателя может быть разное количество полюсов на статоре. ► Как управляются бесщеточные двигатели постоянного тока?Для работы большинства двигателей BLDC требуется контроллер или драйвер. Существует множество различных типов элементов управления и приводов, предназначенных для различных приложений. Многие из них поставляются с настраиваемыми опциями, и Anaheim Automation может предложить индивидуальные конструкции, специфичные для приложения клиента. Эти устройства обычно называют «электронными регуляторами скорости» или ESC.В бесщеточном контроллере постоянного тока или драйвере BLDC для запуска двигателя будет использоваться датчик Холла или обратная ЭДС (электродвижущая сила). Эффект Холла использует три датчика Холла внутри двигателя для определения положения ротора. Этот метод в основном используется в приложениях, требующих определения скорости, позиционирования, измерения тока и бесконтактного переключения. Магнитное поле будет изменяться в ответ на изменение выходного напряжения преобразователем. Поскольку датчик работает как аналоговый преобразователь, петля обратной связи создается путем прямого возврата напряжения. Расстояние между пластиной Холла и известным магнитом, а также относительное положение магнита можно определить с помощью внутренних датчиков Холла. Датчик Холла также может действовать как переключатель включения / выключения в цифровом режиме и в сочетании с соответствующей схемой. Обратная ЭДС, также известная как противодействующая электродвижущая сила, вызывается изменяющимся электромагнитным полем. В бесщеточных электродвигателях обратная ЭДС — это напряжение, которое возникает там, где есть движение между внешним магнитным полем и якорем двигателя.Другими словами, напряжение в катушке индуктивности создается переменным или пульсирующим током. В любой момент полярность напряжения обратна входному. Этот метод обычно используется для косвенного измерения положения и скорости двигателя. ► В чем основное отличие щеточного двигателя постоянного тока от бесщеточного двигателя постоянного тока?Щеточные или «щеточные» двигатели постоянного тока используют коммутационные щетки, которые периодически изменяют направление протекания тока для поддержания крутящего момента.Из-за возможного износа этих щеток щеточный электродвигатель постоянного тока потребует большего обслуживания и будет иметь более короткий срок службы, чем бесщеточные электродвигатели постоянного тока. Вместо щеток в двигателях BLDC используются датчики Холла на задней стороне двигателя. Эти датчики Холла выдают импульсы высокого и низкого уровня, когда они обнаруживают изменение магнитного поля. По этой причине для бесщеточных двигателей постоянного тока требуются более сложные контроллеры, такие как VSD (приводы с регулируемой скоростью). Кроме того, поскольку в двигателях BLDC не используются щетки для коммутации, они намного более эффективны, требуют очень низких затрат на обслуживание и имеют более длительный срок службы, чем щеточные двигатели постоянного тока. ► Где используются двигатели BLDC? Бесщеточные двигатели постоянного токашироко используются во многих отраслях и сферах применения. Например: Бытовая электроника BLDC также стали популярными среди радиоуправляемых (RC) автомобилей, багги и грузовиков, где двигатели BLDC сенсорного типа позволяют определять положение магнита ротора. Многие двигатели BLDC оснащены модернизированными и заменяемыми деталями, такими как спеченный неодим-железо-бор (редкоземельные магниты), сменные узлы синхронизации двигателя и керамические подшипники.В результате эти двигатели BLDC быстро поднимаются на вершину списка как предпочтительный двигатель для электрических гонщиков на дорогах и бездорожье. Двигатели BLDC не требуют технического обслуживания и обеспечивают высокую надежность и энергоэффективность. Большинство двигателей BLDC имеют КПД 80% или более. Транспорт HVAC Моделисты и любители Применение в медицине Апноэ во сне также можно лечить с помощью бесщеточных двигателей постоянного тока. Для лечения заболевания необходимо использовать респираторы с положительным давлением в дыхательных путях (PAP). Респиратор PAP прикреплен к специальной дыхательной маске, которую пациент должен носить, чтобы дышать во время сна.Внутри респиратора находится нагнетательный вентилятор, который нагнетает давление в воздушной маске в соответствии с дыханием пациента. Когда пациент вдыхает, нагнетательный вентилятор ускоряется, позволяя большему количеству воздуха достичь легких. И наоборот, когда пациент выдыхает, вентилятор замедляется, чтобы уменьшить количество выдыхаемого пациентом воздуха. Бесщеточные двигатели постоянного тока никогда не должны работать ниже минимальной пороговой скорости привода, поэтому они являются идеальным источником питания для нагнетательных вентиляторов. Кроме того, нет риска резких изменений нагрузки.Стандарты низкого уровня шума заставляют больничное оборудование работать как можно тише, что делает бесщеточные двигатели постоянного тока лучшим кандидатом из-за того, насколько бесшумно они работают. Бесщеточные двигатели постоянного тока могут точно работать на высоких скоростях, сохраняя при этом низкий уровень шума. Поэтому их можно использовать как в больницах, так и дома у пациентов. Отсутствие коммутатора и щеток в бесщеточных двигателях постоянного тока устраняет еще больше шума двигателя. Дополнительные отрасли могут включать:
При выборе бесщеточных двигателей постоянного тока необходимо учитывать несколько факторов: Какое у меня приложение? Какие у меня характеристики? Сколько я хочу потратить? Какой контроллер / драйвер подходит больше всего? Эти вопросы помогут сузить круг выбора.Затем вам нужно будет определить все спецификации, известные и возможные. Например, вам нужен определенный размер кадра, вес, мощность, скорость, длина и т. Д.? Каждый из перечисленных двигателей будет предлагать характеристики, присущие этой конкретной модели, такие как номинальное напряжение, номинальный крутящий момент, постоянный крутящий момент, постоянная противо-ЭДС и номинальная мощность, которые относятся к соответствующему драйверу. Выберите драйвер на основе номинальной мощности, номинального напряжения и тока, необходимого для работы вашего двигателя с учетом требований вашего приложения.Имейте в виду, что существует множество различных двигателей и драйверов / контроллеров на выбор. Если вам потребуется помощь в выборе, наши инженеры будут рады помочь вам. ► Каковы преимущества и недостатки бесщеточных двигателей постоянного тока?Некоторые из преимуществ бесщеточных двигателей постоянного тока, но не ограничиваются ими:
Недостатки бесщеточных двигателей постоянного тока:
Обычно, когда используется термин «бесщеточный», он относится к бесщеточным двигателям постоянного тока, а не к общему термину управления, означающему «контур обратной связи, используемый для позиционирования продукта, включая элементы бесщеточных двигателей постоянного тока.«Бесщеточные двигатели постоянного тока отличаются от других управляемых двигателей, поскольку они управляются производной по времени, обычно известной как контур ПИД. Бесщеточные двигатели постоянного тока должны иметь возможность изменять скорость (скорость изменения положения) выходного вала из-за временная производная. Бесщеточные двигатели постоянного токамогут обеспечить более эффективный, надежный и компактный двигатель, который можно использовать различными способами. По сути, бесщеточные двигатели постоянного тока — это синхронные электродвигатели, которые питаются от источника постоянного тока.Схема электрической коммутации заменяет стандартный коммутатор и щеточный узел в щеточном двигателе постоянного тока. Бесщеточные двигатели постоянного тока и щеточные двигатели постоянного тока по сути являются полярными противоположностями — в то время как обмотки щеточных двигателей постоянного тока вращаются вокруг вращающегося вала или якоря, бесщеточные двигатели постоянного тока имеют обмотки, которые прикреплены к корпусу двигателя. Магниты щеточных двигателей постоянного тока прикреплены к корпусу двигателя, а магниты бесщеточных двигателей постоянного тока прикреплены к ротору. Коммутация — это процесс изменения полярности фазных токов в обмотках двигателя в точное время, при котором создается постоянный крутящий момент.Если коммутации не произошло, магниты и магнитные поля заблокировали бы вращающийся вал на месте, выровняв себя. Подходящее время разворота имеет решающее значение; вал бесщеточного двигателя постоянного тока должен продолжать вращаться, и это происходит в результате изменения полярности обмоток. Основное отличие бесщеточных двигателей постоянного тока от щеточных двигателей постоянного тока заключается в их способах коммутации. В щеточных двигателях постоянного тока используются щетки и коммутатор, который действует как электромеханический переключатель для подключения обмоток с соблюдением полярности.В бесщеточных двигателях постоянного тока электронные переключатели заменяют механический переключатель, контролируя время смены полярности через электрическую цепь. Обычно двигатели BLDC определяют положение ротора и управляют электронным приводом бесщеточных двигателей постоянного тока с помощью устройств на эффекте Холла (HFD). Однако, поскольку обратная ЭДС двигателя может контролироваться, HFD можно исключить, чтобы создать бессенсорный привод бесщеточных двигателей постоянного тока. ► Стоимость двигателя BLDCСтоимость двигателей BLDC широко варьируется — от двадцати долларов до нескольких сотен долларов.Стоимость во многом зависит от размеров и возможностей самих бесколлекторных двигателей. ► Основные типы бесщеточных двигателей постоянного токаВсе бесщеточные двигатели постоянного тока представляют собой двигатели с постоянными магнитами. Есть также два основных типа, обозначенные как «трапециевидные двигатели» или «синусоидальные двигатели». Трапециевидный двигатель — это серводвигатель постоянного тока, а синусоидальный двигатель очень похож на синхронный двигатель переменного тока. ► Физические свойства бесщеточных двигателей постоянного токаБесщеточные двигатели постоянного тока имеют внешний вид стационарного трехфазного устройства с постоянными магнитами, известного как «статор».«Вращающийся якорь расположен внутри устройства и называется« ротором ». Бесщеточные двигатели постоянного тока могут иметь множество различных конфигураций. Одна конфигурация известна как тип« Inrunner », где постоянные магниты являются частью ротора. и три обмотки статора окружают ротор. Другой конфигурацией является тип «Outrunner», в котором радиальное соотношение между катушками и магнитами обратное. Катушки статора образуют сердечник двигателя, в то время как постоянные магниты вращаются внутри выступающего ротора, окружающего сердечник. . ► Конструкция двигателя BLDC Статор В основном существует два типа обмоток статора: синусоидальная и трапецеидальная. Разница в обмотках статора определяется во взаимном соединении катушек обмоток статора, что приводит к другому типу противо-ЭДС. Трапециевидный вариант обеспечивает обратную ЭДС в форме трапеции. Каждое синусоидальное изменение дает его двигателю BLDC обратную ЭДС, соответствующую току.В разломе также используется форма синусоиды и трапеции. Разница между двумя бесщеточными двигателями постоянного тока заключается в том, что синусоидальные двигатели имеют более плавный выходной крутящий момент, чем у трапецеидальных двигателей. Обмотка статора может быть намотана на несколько напряжений. Это можно настроить практически для любого отдельного приложения. Ротор Корпус Электромонтаж Следующая информация представляет собой общее руководство по установке и монтажу систем бесщеточных двигателей постоянного тока. ПРЕДУПРЕЖДЕНИЕ. В системах бесщеточных двигателей постоянного тока может присутствовать опасное напряжение, которое может привести к травмам или смерти. Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. Очень важно, чтобы проводка двигателей и контроллеров BLDC была принята во внимание перед установкой и монтажом. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов систем бесщеточных двигателей постоянного тока, должны иметь плоскую жесткую поверхность и не иметь ударов, вибрации, влаги, масла, паров или пыли. Помните, что бесщеточные двигатели постоянного тока и контроллеры выделяют тепло во время работы. Обязательно учитывайте рассеивание тепла при проектировании компоновки системы. Чтобы не превышать максимально допустимую температуру окружающей среды, точно определите размер корпуса и убедитесь, что контроллер BLDC будет установлен в положении, обеспечивающем надлежащий воздушный поток. Двигатель BLDC должен быть установлен устойчиво и надежно закреплен. ПРИМЕЧАНИЕ. Между бесщеточными контроллерами постоянного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть расстояние не менее 10 мм.Чтобы соответствовать стандартам CE и UL, бесщеточная система постоянного тока должна быть заземлена в заземляющем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или любого неквалифицированного лица. . Как и любая другая активная часть системы, двигатель BLDC всегда должен находиться вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и субпанелью, сделайте субпанель из оцинкованной (не содержащей краски) стали.Кроме того, настоятельно рекомендуется защищать контроллеры BLDC от помех, связанных с электрическими помехами, поскольку шум от сигнальных проводов может вызвать механическую вибрацию и сбои в работе. ► Принадлежности для бесщеточных двигателейКомпания Anaheim Automation предлагает различные аксессуары для наших бесщеточных двигателей постоянного тока, включая тормоза, энкодеры, устройства считывания скорости, разъемы, кабели и драйверы. Тормоза могут быть предварительно смонтированы на любом двухвальном двигателе постоянного тока постоянного тока и будут доставлены заказчику прикрепленными к заднему валу двигателя.Наши бесщеточные двигатели постоянного тока имеют конструкцию с низким напряжением (24 В постоянного тока) для приложений, которые чувствительны к отключению питания, слабым батареям или длительным пробегам проводки. Когда на тормоз подается электрическая мощность, якорь притягивается электромагнитной силой в узле тела магнита, которая преодолевает действие пружины, позволяя фрикционному диску свободно вращаться. При прерывании подачи электроэнергии электромагнитная сила снимается, и нажимная пружина механически заставляет пластину якоря зажать фрикционный диск между собой и прижимной пластиной. Кабели и разъемы для бесщеточного двигателя, по запросу, также могут быть предварительно смонтированы на двигателе в качестве дополнительной сборки или могут быть заказаны отдельно в Anaheim Automation. ► Обратная связь энкодераДля низкоскоростных устройств рекомендуется использовать энкодер для обратной связи, а не датчики Холла. Количество отсчетов на оборот датчика Холла может быть ровно столько, сколько полюсов, умноженное на количество датчиков Холла.При работе бесщеточного двигателя контроллер BLDC может использовать большее количество в своих интересах. Бесщеточный контроллер может использовать дополнительные данные CPR, имеющиеся в его распоряжении, для более точного управления скоростью. Чем выше разрешение энкодера, тем точнее будет управление двигателем. Хотя энкодеры дороже датчиков Холла, точный уровень управления по-прежнему обходится дешевле, чем альтернативные технологии, такие как двигатели переменного тока, серводвигатели или синхронные двигатели. ► Обратная связь датчика Холла Датчики Холласоздают обратную связь при вращении последовательно включенных обмоток статора бесщеточного двигателя постоянного тока. Чтобы понять, какая следующая обмотка должна быть запитана в правильной последовательности, контроллеру необходимо знать положение ротора. Положение ротора определяется датчиками Холла, встроенными в заднюю крышку корпуса двигателя BLDC. В бесщеточных двигателях постоянного тока используются три датчика Холла, которые разделены на 60 ° или 120 °.Каждый датчик Холла обычно устанавливается на печатной плате и прикрепляется к задней крышке на неприводном конце бесщеточного двигателя постоянного тока. Датчики Холла воспринимают либо магнит ротора, либо внешний магнит, расположенный в задней части вала, и посылают сигнал, указывающий, проходит ли через цензоры северный или южный полюс. Используя каждый сигнал от датчиков, контроллер может легко поддерживать скорость двигателя. ► Жизненный цикл бесщеточного двигателяКлючевым отличием бесщеточных двигателей от их предшественников является процесс коммутации.Более новые бесщеточные двигатели постоянного тока коммутируются электрически с помощью элементов Холла, счетчика противо-ЭДС или обратной связи энкодера. Двигатели BLDC очень полезны и экономичны как по конструкции, так и по конструкции, однако есть некоторые факторы, которые могут отрицательно повлиять на ожидаемый срок службы двигателя: Ключевые моменты, которые следует запомнить — Отказ подшипника и недостаток смазки являются основными факторами выхода из строя бесщеточных двигателей постоянного тока. В результате производители теперь используют компоненты промышленного класса, что приводит к появлению некоторых бесщеточных электродвигателей со сроком службы более 20 000 часов и более! В эти бесщеточные двигатели постоянного тока интегрированы шарикоподшипники с постоянной смазкой, в которых используется специальная консистентная смазка, что исключает необходимость повторной смазки. ВАЖНОЕ ПРИМЕЧАНИЕ. Не рекомендованные смазочные материалы не рекомендуются для компонентов бесщеточного двигателя постоянного тока. Использование таких смазочных материалов может потенциально сократить срок службы двигателя BLDC. Температура также играет ключевую роль в сроке службы бесщеточных электродвигателей. В частности, кожух двигателя должен обеспечивать отвод тепла, выделяемого в обмотках бесщеточного двигателя. Двигатели BLDC могут быть серьезно повреждены, если превышен максимальный предел нагрева.Производительность двигателя BLDC напрямую зависит от максимально возможной температуры ротора, температуры окружающей среды и рабочего цикла. При повышении температуры сопротивление обмотки увеличивается, а магнитные силы уменьшаются, в результате чего бесщеточные двигатели работают менее эффективно. Когда бесщеточные двигатели постоянного тока работают при высоких продолжительных нагрузках, теплоотвод и принудительное воздушное охлаждение могут значительно снизить рабочие температуры. Настоятельно рекомендуется учитывать все эти факторы при проектировании и установке систем управления движением, в том числе бесщеточных двигателей постоянного тока. ► НастройкаAnaheim Automation предлагает широкий выбор стандартных бесщеточных двигателей постоянного тока. Тем не менее, OEM-заказчики со средними и большими требованиями к количеству могут предпочесть, чтобы двигатель был настроен или модифицирован в соответствии с их точными проектными спецификациями. Часто настройка так же проста, как модификация вала, добавление тормоза, масляного уплотнения для степени защиты IP65, отрегулированные установочные размеры, различные цвета проводов или индивидуальная этикетка.В других случаях заказчик может потребовать, чтобы двигатель был спроектирован с учетом идеальных характеристик, таких как скорость, крутящий момент и / или напряжение. База заказчиков двигателей BLDC компанииAnaheim Automation разнообразна, в том числе: компании, эксплуатирующие или проектирующие автоматизированное оборудование или функции, которые включают продукты питания, косметику или медицинскую упаковку, требования к маркировке или защите от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальные киносъемочные и проекционные эффекты. , медицинская диагностика, устройства для осмотра и безопасности, управление потоком насосов, изготовление металлов (станки с ЧПУ), модернизация оборудования и многое другое.Многие OEM-заказчики запрашивают частную маркировку своих нестандартных конструкций, чтобы поддерживать лояльность своих клиентов к обслуживанию, замене и ремонту. Покупатели ценят удобство, предоставляемое Anaheim Automation как универсальное решение, а также экономию затрат благодаря индивидуальной конструкции бесщеточного двигателя. Инженеры ценят творческий подход, эффективность системы и гибкость, которые Anaheim Automation представляет для своей линейки продуктов BLDC. Наши стандартные бесщеточные двигатели известны своей прочной конструкцией, отличными характеристиками и экономичностью. Значительная часть наших продаж является результатом нашей способности превзойти ожидания клиентов в выполнении их индивидуальных требований. Хотя значительная часть продаж бесщеточных двигателей постоянного тока Anaheim Automations состоит из индивидуальных, специальных или частных требований, мы гордимся нашим запасом стандартных единиц, расположенным в Анахайме, Калифорния, США. Чтобы сделать процесс настройки доступным, может потребоваться минимальный объем заказа (MOQ) и / или плата за непериодическое проектирование (NRE).Все продажи настроенных или модифицированных бесщеточных двигателей постоянного тока не подлежат отмене и возврату, а соглашение NCNR должно быть подписано клиентом во время размещения заказа. NCNR может потребоваться обновлять с каждым запросом на покупку. Все продажи, включая нестандартные конструкции, осуществляются в соответствии со стандартными Положениями и условиями Anaheim Automation, которые имеют приоритет над любыми другими явно выраженными или подразумеваемыми условиями, включая, помимо прочего, любые подразумеваемые гарантии. ОБРАТИТЕ ВНИМАНИЕ: Техническая поддержка в отношении бесщеточных двигателей постоянного тока или любых других продуктов, производимых или распространяемых Anaheim Automation, будет предоставляться бесплатно.Эта помощь предоставляется, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Однако любые рекомендации по применению, выбору или расценкам на любой продукт, предоставляемые персоналом, дистрибьюторами или представителями Anaheim Automation, предоставляются исключительно в помощь заказчику. Во всех случаях заказчик несет полную ответственность за определение соответствия стандартного или нестандартного продукта определенной конструкции системы. Несмотря на то, что мы прилагаем все усилия, чтобы дать надежный совет относительно наших продуктов, а также предоставить точные технические данные и иллюстрации, обратите внимание, что такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления. ► БезопасностьСоблюдайте особую осторожность при проверке, обращении, регулировке и подключении во время настройки, настройки, установки и эксплуатации. Системы бесщеточных двигателей постоянного тока при работе под высоким напряжением могут стать причиной травм или смерти. Во избежание риска поражения электрическим током перед подачей питания выполните все монтажные и электромонтажные работы системы бесщеточных двигателей постоянного тока и контроллеров. После подачи питания на соединительные клеммы может присутствовать напряжение.Чтобы предотвратить механическую вибрацию, которая может привести к отказу и / или поломке системы, никогда не вносите резких изменений или корректировок в параметры системы двигателя BLDC. Не включайте и не выключайте питание контроллеров бесщеточных двигателей постоянного тока напрямую, пока к бесщеточным двигателям постоянного тока подключена проводка. Частое включение и выключение питания также сокращает срок службы систем бесщеточных электродвигателей из-за старения внутренних компонентов. Обязательно соблюдайте следующие правила:
ПРИМЕЧАНИЕ. Кабели заводского изготовления идеально подходят для использования в наших бесщеточных двигателях постоянного тока и системах драйверов. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, для повышения производительности системы и обеспечения дополнительной безопасности для системы бесщеточных двигателей постоянного тока и пользователя. ► Требования к окружающей среде для двигателей BLDCСледующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы двигателя BLDC.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя и контроллера BLDC. Обратите внимание, что даже хорошо сконструированные двигатели и контроллеры BLDC при неправильной эксплуатации и установке могут быть опасными. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу системы двигателя BLDC. Атмосфера, в которой используются бесщеточные двигатели, должна способствовать соблюдению общих правил использования электрического / электронного оборудования.Не эксплуатируйте бесщеточный электродвигатель в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании на открытом воздухе двигатель и контроллер должны быть защищены от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные степени защиты IP. Устанавливайте двигатель и контроллер BLDC в среде, свободной от конденсации, электрических шумов, вибрации и ударов. Убедитесь, что в этой области нет мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с цепями. Если не предотвратить попадание мусора в систему бесщеточного двигателя постоянного тока, это может привести к повреждению и / или удару. Кроме того, предпочтительно работать с бесщеточным двигателем постоянного тока и системой контроллера в нестатической защитной среде. Открытые цепи всегда должны быть должным образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Во время подачи питания запрещается выполнять какие-либо работы. Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя BLDC после выключения питания, потому что даже после отключения питания в конденсаторах внутренней цепи контроллера бесщеточного двигателя постоянного тока все еще будет оставаться некоторая электрическая энергия. . ► История бесщеточных двигателей постоянного токаХотя бесщеточные двигатели постоянного тока широко используются в коммерческих целях с 1962 года, первые двигатели BLDC появились в 1800-х годах. Это стало возможным благодаря преобразованию электрической энергии в механическую с помощью электромагнитных средств, что было продемонстрировано в 1821 году британским ученым Майклом Фаради. В 1827 году венгерский физик Аньош Едлик начал экспериментировать с устройствами, которые он назвал электромагнитными самовращающимися роторами.В то время они использовались исключительно в учебных целях. В 1828 году он продемонстрировал первое устройство, содержащее три основных компонента практических двигателей постоянного тока: ротор, коммутатор и статор. Магнитные поля вращающихся и неподвижных компонентов создавались токами, протекающими через их обмотки, а двигатели постоянного тока в то время не содержали постоянных магнитов. Уильям Стерджен, другой британский ученый, в 1832 году изобрел первый электродвигатель постоянного тока коммутаторного типа, способный вращать механизмы.Американцы Томас и Эмили Дэвенпорт построили электродвигатель постоянного тока коммутаторного типа с намерением коммерческого использования вслед за прогрессом Стерджена, запатентовав свою работу в 1837 году. Эти ранние двигатели BLDC использовались в печатных станках и механических станках. Говорят, что они развивали до 600 оборотов в минуту (об / мин). Двигатели изначально не имели успеха в коммерческой сфере из-за высокой стоимости энергии первичной батареи и отсутствия в то время практического коммерческого рынка для двигателей BLDC. Современные двигатели BLDC были случайно изобретены в 1873 году Зенобом Граммом. Затем он создал Gramme Machine, первый электродвигатель, добившийся успеха в коммерческой индустрии. Неискрящий двигатель, способный работать с постоянной скоростью при переменных нагрузках, был первой практичной современной формой бесщеточных двигателей постоянного тока, изобретенных в 1886 году Фрэнком Джулианом Спрагом. |
Радиоуправляемые автомобили и грузовики Моторы
Это просто!
- Шаг 1: Создайте зарегистрированный аккаунт на HorizonHobby.com
Шаг 2: Делайте покупки и создавайте свою тележку с вашими любимыми продуктами In Stock RC
Шаг 3: Выберите способ оплаты «Easy Pay», чтобы разделить ваши платежи
Шаг 4: Отправьте заказ!
БЕСПЛАТНОЕ ФИНАНСИРОВАНИЕ — БЕЗ ПРОЦЕНТОВ — БЕЗ КРЕДИТНЫХ ЧЕКОВ — БЕЗ ПЛАТЫ ЗА ОБСЛУЖИВАНИЕ
Квалификация
- Клиент должен иметь зарегистрированный аккаунт с хорошей репутацией на HorizonHobby.com
- Минимальная сумма заказа $ 100 квалифицируемых товаров на складе (до налогообложения и доставки).
- Общий доступный кредитный лимит = 500 $ . Минимальная сумма финансирования = 50 долларов США.
- Доступно только для подходящих товаров на складе
- Товары по предварительному и невыполненному заказу в вашем заказе будут списаны в полном объеме при отправке. Платежи Easy Pay и кредит будут рассчитаны только для товаров, имеющихся в наличии в заказе.
- Прочие расходы, включая, помимо прочего, доставку и обработку, налоги, товары, не соответствующие критериям, будут выставлены на счет при первом платеже.Платежи за товары, не соответствующие критериям Easy Pay, подлежат оплате во время заказа.
- Easy Pay доступен только при использовании действующей кредитной карты. Paypal нельзя использовать с Easy Pay.
Платежи и графики
- Платежи Easy Pay будут разделены на два или три платежа. Первый платеж снимается с вашей кредитной карты при выставлении счета за заказ. Счета за дополнительные платежи выставляются на кредитную карту каждые 30 дней после первого платежа, пока не будут произведены все платежи.
- Для значений заказа от 100,00 до 299,99 долларов США платежи будут разделены на два платежа. Для стоимости заказа> 300 долларов платежи будут разделены на три платежа.
- 1-й платеж = время покупки (включая налоги, стоимость доставки и товары, не соответствующие критериям)
- 2-й платеж = Запланировано через 30 дней после первоначальной покупки
- 3-й платеж = запланирован через 60 дней после первоначальной покупки
- Платежи будут разделены поровну, если позволяет кредитный лимит, а запланированные суммы платежей будут ограничены доступным оставшимся кредитным лимитом.
* Просматривайте и управляйте своими способами оплаты Easy Pay, планируйте и просматривайте доступный кредитный лимит в разделе «Easy Pay» Моего счета.
* Вариант финансирования Easy Pay доступен по усмотрению Horizon, условия могут быть изменены.
Бесщеточный двигатель | RC Wiki
Бесщеточный двигатель постоянного тока ( BLDC ) — это электродвигатель постоянного тока, в котором вместо механической системы коммутации используется система коммутации с электронным управлением.(В остальной части этой статьи предполагается, что читатель знаком с принципами работы электродвигателей, но если вам нужна дополнительная информация, вы можете прочитать о бесщеточных и щеточных двигателях.)
В обычном (щеточном) двигателе постоянного тока щетки механически контактируют с набором электрических контактов на роторе (так называемый коммутатор ), образуя электрическую цепь между источником постоянного тока и обмотками катушки якоря. При вращении якоря вокруг оси неподвижные щетки контактируют с различными секциями вращающегося коллектора.Коммутатор и щеточная система образуют набор электрических переключателей, каждый из которых срабатывает последовательно, так что электроэнергия всегда течет через катушку якоря, ближайшую к неподвижному статору (постоянный магнит).
В двигателе BLDC узел щеточной системы / коммутатора заменен интеллектуальным электронным контроллером. Контроллер выполняет то же распределение мощности, что и в щеточном двигателе постоянного тока, только без использования системы коммутатора / щеток. Контроллер содержит группу MOSFET-транзисторов для управления сильноточной мощностью постоянного тока и микроконтроллер для точного управления быстро меняющимися временами тока.Поскольку контроллер должен следовать за ротором, контроллеру необходимы некоторые средства для определения ориентации / положения ротора (относительно катушек статора). В некоторых конструкциях используются датчики на эффекте Холла для непосредственного измерения положения ротора. Другие измеряют обратную ЭДС в неприводных катушках, чтобы определить положение ротора, устраняя необходимость в отдельных датчиках эффекта Холла. (Двигатель BLDC имеет трапециевидную заднюю частоту, в то время как бесщеточный двигатель переменного тока имеет синусоидальную заднюю частоту.)
Двигатели BLDC могут быть сконструированы в двух различных физических конфигурациях: В «традиционной» конфигурации постоянные магниты установлены на вращающемся якоре (ротор.) Катушки статора окружают ротор. В конфигурации «бегунок» радиальное соотношение между катушками и магнитами обратное; Катушки статора образуют центр (сердечник) двигателя, в то время как постоянные магниты вращаются на выступающем роторе, который окружает сердечник. Во всех двигателях BLDC обмотки статора неподвижны.
Сравнение с щеточными двигателями постоянного тока []
ДвигателиBLDC обладают рядом преимуществ перед щеточными двигателями постоянного тока, включая более высокую надежность, более длительный срок службы (отсутствие эрозии щеток), устранение ионизирующих искр от коллектора и общее снижение электромагнитных помех ( EMI .) Основным недостатком BLDC является более высокая стоимость, которая возникает из-за двух проблем: во-первых, для двигателей BLDC требуются мощные полевые МОП-транзисторы при изготовлении электронного регулятора скорости. Щеточные двигатели постоянного тока могут регулироваться сравнительно тривиальным переменным резистором (потенциометром или реостатом), что неэффективно, но также подходит для приложений, чувствительных к стоимости. Двигатели BLDC нуждаются в более дорогой интегральной схеме, называемой электронным регулятором скорости, чтобы предлагать такой же тип переменного управления. Во-вторых, при сравнении технологий производства BLDC и щеточных двигателей, многие конструкции BLDC требуют ручного труда для ручного наматывания катушек статора.С другой стороны, в щеточных двигателях используются катушки якоря, которые можно недорого намотать машинным способом.
Двигатели с BLDC считаются более эффективными, чем щеточные двигатели постоянного тока. Это означает, что при той же входной мощности двигатель BLDC будет преобразовывать больше электроэнергии в механическую мощность, чем щеточный двигатель. Повышенный КПД является максимальным в области холостого хода и низкой нагрузки характеристики двигателя. При высоких механических нагрузках двигатели BLDC и высококачественные щеточные двигатели сопоставимы по эффективности.
Приложения []
ДвигателиBLDC потенциально могут быть использованы в любых полевых условиях, которые в настоящее время выполняются щеточными двигателями постоянного тока. Стоимость не позволяет двигателям BLDC заменять щеточные двигатели в наиболее распространенных областях использования. Тем не менее, двигатели BLDC стали доминировать во многих приложениях: в потребительских устройствах, таких как жесткие диски компьютеров, CD / DVD-плееры и вентиляторы охлаждения ПК, почти исключительно используются двигатели BLDC. Бесщеточные двигатели постоянного тока с низкой скоростью и малой мощностью используются в поворотных столах с прямым приводом. Двигатели BLDC большой мощности используются в электромобилях и некотором промышленном оборудовании.Эти двигатели представляют собой синхронные двигатели переменного тока с роторами с постоянными магнитами.
Сцена для любителей []
В последнее время рост популярности моделей самолетов с электрическим приводом стимулировал спрос на высокопроизводительные двигатели BLDC. Многие любители начали восстанавливать двигатели BLDC из использованных приводов CD / DVD-ROM, переоборудовав их для использования в радиоуправляемых самолетах. Это привело к увеличению прямой доступности для потребителей моторных комплектов DIY (сделай сам) для использования в радиоуправляемых транспортных средствах.Двигатели BLDC, продаваемые в виде комплектов деталей, позволяют покупателю сэкономить деньги за счет дополнительных сборочных работ.
В бесщеточных двигателях для хобби используется потенциально вводящая в заблуждение система номинальной мощности, которая представляет собой число, за которым следует суффикс «кв». Суффикс не означает «киловольты», как можно было бы подумать, но вместо этого относится к оборотам двигателя на вольт. Таким образом, рейтинг 4200 кВ просто относится к двигателю, который вращает 4200 об / мин на вольт.
Следующие производители продают комплекты электродвигателей для самостоятельного использования в моделях автомобилей: (Этот список не полный.)
http://www.aveox.com На этом сайте есть информация о бесщеточных двигателях, в том числе двигателях осевого исполнения: http://web.archive.org/web/20060125012427/http://www.members.cox.net/~rdoctors
Сравнение бесщеточных двигателей []
Ниже представлена таблица с наблюдениями, внесенными пользователями. Предлагаем вам поделиться своими наблюдениями.
| Производитель | МодельВт. (грамм) | кв. | Опора D » | Опора P » | Лопасти пропеллера | В | А | Тяга (г) | |
|---|---|---|---|---|---|---|---|---|---|
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 10 | 4.5 | 2 | 11,1 | 1000 | |
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 9 | 4,5 | 2 | 11,1 | 850 | |
| Андоэр | A2212 / 13T | ~ 55 г | 1000 | 8 | 4,5 | 2 | 11,1 | 800 | |
| Андоэр | A2212 / 6T | ~ 55 г | 2200 | 5 | 4.5 | 3 | 11,1 | 800 |
Производитель. = Производитель
Вес. = Вес (в граммах)
Kv = об / мин на приложенный вольт
Prop D «= диаметр стойки (в дюймах)
Prop P «= Шаг стойки (в дюймах)
Лопасти пропеллера = Количество лопастей на винте (стандартный «плоский» гребной винт имеет две лопасти; однолопастные гребные винты встречаются очень редко)
В = напряжение, приложенное во время испытания (измеренное с помощью вольтметра или рассчитанное на основе количества ячеек при полностью открытой дроссельной заслонке)
A = ток, потребляемый во время теста (измеренный с помощью амперметра)
Тяга = Измеренная тяга (в граммах)
.