Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД – это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
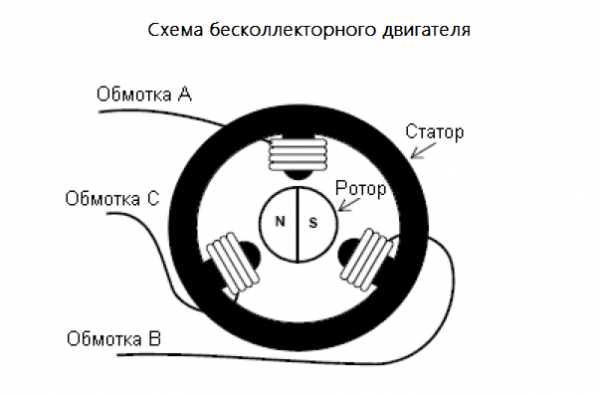
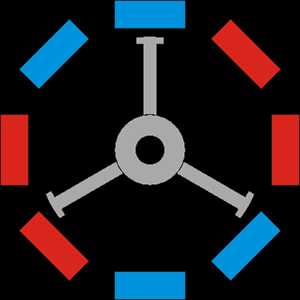
 Рис. 2. Устройство бесколлекторного двигателя
Рис. 2. Устройство бесколлекторного двигателяКак видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
 Рис. 3. Конструкция с внешним якорем (outrunner)
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
 Бесколлекторный двигатель в компьютерном дисководе
Бесколлекторный двигатель в компьютерном дисководеПринцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
 Фазы работы бесколлекторного привода
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
 Рис. 5. А – коллекторный двигатель, В – бесколлекторный
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
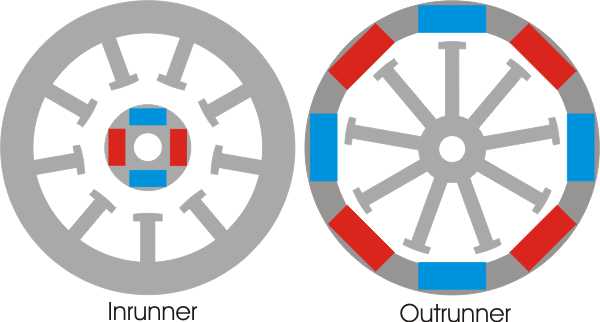 Рис. 6. Контроллеры бесколлекторных двигателей для моделизма
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.
Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
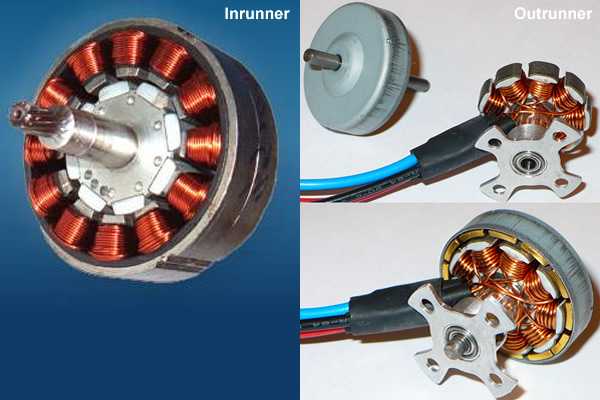 Рисунок 7. Диаграммы напряжений БД
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» – отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» – положительный, «А» – отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
 Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателем
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
www.asutpp.ru
Как устроен бесщеточный двигатель
Работа бесщеточного электродвигателя основывается на электрических приводах, создающих магнитное вращающееся поле. В настоящее время существует несколько типов устройств, имеющих различные характеристики. С развитием технологий и использованием новых материалов, отличающихся высокой коэрцитивной силой и достаточным уровнем магнитного насыщения, стало возможным получение сильного магнитного поля и, как следствие, вентильных конструкций нового вида, в которых отсутствует обмотка на роторных элементах или стартере. Обширное распространение переключателей полупроводникового типа с высокой мощностью и приемлемой стоимостью ускорило создание подобных конструкций, облегчило исполнение и избавило от множества сложностей с коммутацией.
Принцип работы
Увеличение надежности, уменьшение цены и более простое изготовление обеспечивается отсутствием механических коммутационных элементов, обмотки ротора и постоянных магнитов. При этом повышение результативности возможно благодаря уменьшению потерь трения в коллекторной системе. Бесщеточный двигатель может функционировать на переменном либо непрерывном токе. Последний вариант отличается заметным сходством с коллекторными двигателями. Его характерной особенностью является формирование магнитного вращающегося поля и применение импульсного тока. В его основе присутствует электронный коммутатор, из-за чего повышается сложность конструкции.
Вычисление положения
Генерирование импульсов происходит в управляющей системе после сигнала, отражающего положение ротора. От стремительности вращения мотора напрямую зависит степень напряжения и подачи. Датчик в стартере определяет положение ротора и подает электрический сигнал. Вместе с магнитными полюсами, проходящими рядом с датчиком, меняется амплитуда сигнала. Также существуют бездатчиковые методики установления положения, к их числу относятся точки прохождения тока и преобразователи. ШИМ на входящих зажимах обеспечивают сохранение переменного уровня напряжения и управление мощностью.
Для ротора с неизменными магнитами подведение тока необязательно, благодаря чему отсутствуют потери в обмотке ротора. Бесщеточный двигатель для шуруповерта отличается низким уровнем инерции, обеспечиваемым отсутствием обмоток и механизированного коллектора. Таким образом появилась возможность использования на высоких скоростях без искрения и электромагнитного шума. Высокие значения тока и упрощение рассеивания тепла достигаются размещением нагревающих цепей на статоре. Стоит также отметить наличие электронного встроенного блока на некоторых моделях.
Магнитные элементы
Расположение магнитов может быть различным в соответствии с размерами двигателя, к примеру, на полюсах или по всему ротору. Создание качественных магнитов с большей мощностью возможно благодаря использованию неодима в сочетании с бором и железом. Несмотря на высокие показатели эксплуатации, бесщеточный двигатель для шуруповерта с постоянными магнитами обладает некоторыми недостатками, в их числе утрата магнитных характеристик при высоких температурах. Но они отличаются большей эффективностью и отсутствием потерь по сравнению с машинами, в конструкции которых имеются обмотки.
Импульсы инвертора определяют скорость вращения механизма. При неизменной питающей частоте работа двигателя осуществляется с постоянной скоростью в разомкнутой системе. Соответственно, скорость вращения меняется в зависимости от уровня питающей частоты.

Характеристики
Вентильный электродвигатель работает в установленных режимах и имеет функционал щеточного аналога, скорость которого зависит от приложенного напряжения. Механизм обладает множеством достоинств:
- отсутствие изменений при намагничивании и утечке тока;
- соответствие скорости вращения и самого вращающего момента;
- скорость не ограничивается центробежной силой, влияющей на коллектор и роторную электрообмотку;
- нет необходимости в коммутаторе и обмотке возбуждения;
- используемые магниты отличаются небольшим весом и компактными размерами;
- высокий момент силы;
- энергонасыщенность и эффективность.
Использование
Бесщеточный двигатель постоянного тока с постоянными магнитами встречается в основном в устройствах с мощностью в пределах 5 кВт. В более мощной аппаратуре их применение нерационально. Также стоит отметить, что магниты в двигателях данного типа отличаются особой чувствительностью к высоким температурам и сильным полям. Индукционные и щеточные варианты лишены таких недостатков. Двигатели активно используются в электрических мотоциклах, автомобильных приводах благодаря отсутствию трения в коллекторе. Среди особенностей нужно выделить равномерность вращающего момента и тока, что обеспечивает снижение акустического шума.
fb.ru
Бесщеточные двигатели постоянного тока
В последнее время все более широкую популярность приобретают бесщеточные двигатели постоянного тока. Они активно используются в приборостроении, промышленной медицинской и бытовой автоматике, а также в контрольно-измерительной аппаратуре. Данный тип двигателей работает без щеток, вся коммутация осуществляется при помощи электронных устройств.
Преимущества бесщеточных двигателей
Бесщеточные двигатели имеют ряд преимуществ, которые и определили области их применения. Они обладают лучшим быстродействием. Их вращающий момент гораздо выше, в сравнении с обычными двигателями. Бесщеточные конструкции отличаются более высокими динамическими характеристиками и коэффициентом полезного действия.
Среди прочих преимуществ, следует отметить бесшумную работу, увеличенный срок эксплуатации и более высокую частоту вращения. Соотношение размеров двигателя и вращающего момента выше, чем у других типов. Это особенно важно для тех областей, где габариты и вес являются критическими факторами.
Принцип работы бесщеточного двигателя
Принцип действия основан на магнитных полях производимых статором и ротором, частота вращения которых одинакова. Здесь отсутствует так называемое скольжение, характерное для асинхронных двигателей. Конфигурация бесщеточных двигателей бывает однофазной, двухфазной или трехфазной. От этого зависит количество обмоток в статоре. Наибольшее распространение во всех областях получили трехфазные двигатели.
Устройство бесщеточного двигателя
В качестве примера, следует рассмотреть наиболее популярный трехфазный бесщеточный двигатель. Он имеет статор, набранный из слоистой стали, в пазах которого размещается обмотка. В большинстве двигателей этого типа имеются три обмотки, соединенные в звезду.
Ротор представляет собой постоянный магнит с полюсами в количестве от 2-х до 8-ми пар. При этом, Южный и Северный полюса чередуются между собой. Ротор изготовлен из специального магнитного материала, обеспечивающего необходимую плотность магнитного поля. Как правило, это ферритовые магниты, из которых изготавливаются постоянные магниты.
В отличие от обычных электродвигателей, бесщеточные двигатели постоянного тока коммутируются при помощи электроники. Это связано с необходимостью последовательной подачи напряжения на обмотки статора. Одновременно, необходимо знать, в каком положении находится ротор. Это положение определяется датчиками Холла, которые подают высокий или низкий сигнал, в зависимости от того, какой полюс проходит возле высокочувствительных элементов.
Генератор постоянного тока без щеток
electric-220.ru
Достоинства и недостатки бесщеточного шуруповерта
С появлением аккумуляторной дрели-шуруповерта выполнять работы по сборке мебели, установке панелей из гипсокартона, а особенно монтажу сайдинга на фасадах зданий, стало намного проще и безопаснее. Аккумуляторный инструмент не имеет мешающего работе электрического шнура питания, который при повреждении изоляции представляет для работающего серьезную опасность.
Бесщеточный шуруповерт
Привычные всем аккумуляторные шуруповерты оснащены коллекторными электродвигателями с переключением тока в обмотках якоря при помощи щеток. Бесщеточные шуруповерты, в отличие от них, комплектуются бесколлекторными электродвигателями. Функции коллекторно-щеточного узла (КШУ) выполняются электронным узлом управления. Разница состоит в том, что он переключает ток в обмотках статора, а не ротора. Якорь же не имеет катушек. Для исключения из конструкции скользящих контактов его магнитное поле создается постоянными магнитами. Момент подачи тока в статорные обмотки определяется при помощи датчиков положения ротора (ДПР), которые работают на основе эффекта Холла.
Импульсы ДПР совместно с сигналом регулятора скорости вращения обрабатываются микропроцессором. Результатом обработки является формирование электрических импульсов, модулированных по ширине. Это так называемый сигнал ШИМ. Результирующая последовательность импульсов подается на усилители тока (инверторы). Их выходы связаны с обмотками статора. Инверторы, в соответствии с выходным сигналами микропроцессорного узла, коммутируют ток в катушках статора. Переменное магнитное поле, вызванное импульсами этого тока, взаимодействуя с постоянным магнитным полем ротора, приводит к вращению якоря.
Достоинства и недостатки электроинструмента без щеток
Плюсами шуруповертов без щеток являются следующие качества:
- Простота регулировки частоты вращения. Возможность изменения ее в широких пределах.
- Отсутствие коллекторно-щеточного узла. Это исключило возникновение связанных с ним неисправностей и упростило техобслуживание инструмента.
- Хорошая переносимость кратковременных перегрузок по крутящему моменту.
- Экономный расход энергии. КПД бесщеточных двигателей около 90%.
- Более длительная наработка на отказ, чем у инструмента с КШУ.
- Отсутствие электрического искрения и, как следствие, безопасность работы во взрывоопасных смесях газов.
- Небольшие размеры и вес.
- У моделей с реверсом – одинаковая мощность в обоих направлениях вращения.
- Отсутствие падения скорости вращения при увеличении нагрузки на патрон.
Из минусов этих инструментов замечен только один. Они несколько дороже своих коллекторных конкурентов.
Какой шуруповерт выбрать
Сравним основные характеристики бесщеточных и коллекторных аккумуляторных дрелей:
- КПД бесщеточных выше почти в 1,5 раза (90 против 60%). Значит, при одинаковой емкости аккумуляторных батарей бесщеточный будет работать без подзарядки значительно дольше.
- Среднее время безотказной работы бесщеточных двигателей больше, чем коллекторных.
- Масса и размеры первых меньше, чем вторых.
Проанализировав достоинства и недостатки аккумуляторных шуруповертов, можно с уверенностью сказать, что модели с бесщеточным двигателем – лучше. Если б стоимость сравниваемых шуруповертов была близка, выбирать следовало бы лучший.
Но преимущества бесщеточных довольно дорого стоят. Вопрос состоит в том, нужны ли они вам за эту разницу в цене.
Есть люди, которые работают исключительно дешевым китайским инструментом. Они объясняют это тем, что вечный инструмент еще не придумали. И любой, даже самый дорогой, когда-нибудь выйдет из строя, тогда нужно будет тратить время и деньги на его ремонт.
Недорогой инструмент до выхода из строя обычно успевает отработать деньги, потраченные на его покупку. Поэтому его не жалко выбросить, недорого купить такой же и опять работать новым. Как говорится, сколько людей – столько и мнений. Выбор за вами!
pro-instrument.com
Бесколлекторные двигатели постоянного тока. Что это такое?
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор – магниты, статор – обмотки.

Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы “ну это как синхронник”, или еще хуже “он похож на шаговик”. Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор “кормит” двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ – это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел – коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники – просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель. Из школьного курса физики помним, как магнитное поле действует на рамку с током. Рамка с током вращается в магнитном поле. При этом она не вращается постоянно, а поворачивается до определенного положения. Для того чтобы происходило непрерывное вращение, нужно переключать направление тока в рамке в зависимости от положения рамки. В нашем случае рамка с током – это обмотка двигателя, а переключением занимается коллектор – устройство со щетками и контактами. Устройство простейшего двигателя смотри на рисунке.
То же самое делает и электроника, управляющая бесколлекторным двигателем – в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя. Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких – без датчиков? В чем их отличие?
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) – применяют двигатели с датчиками.
Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
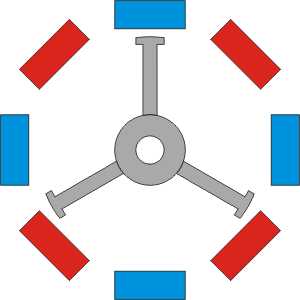
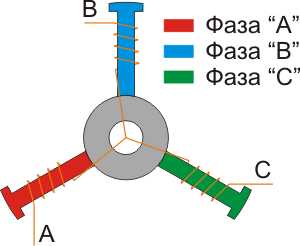
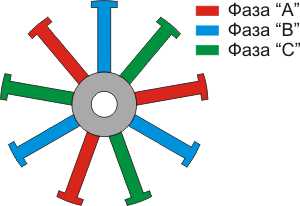
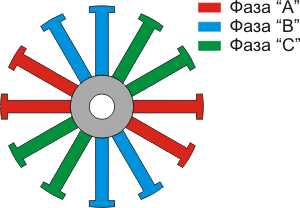
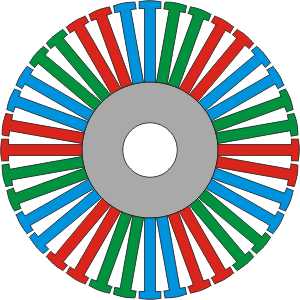
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы – это обмотки двигателя. Поэтому если сказать “трехобмоточный”, думаю, это тоже будет правильно. Три обмотки соединяются по схеме “звезда” или “треугольник”. Трехфазный бесколлекторный двигатель имеет три провода – выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
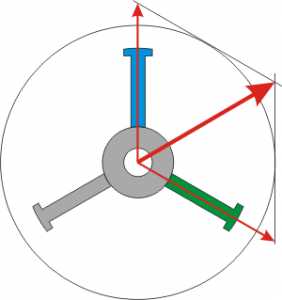
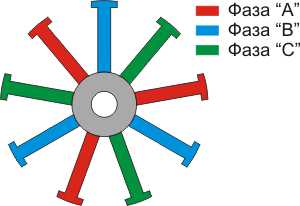
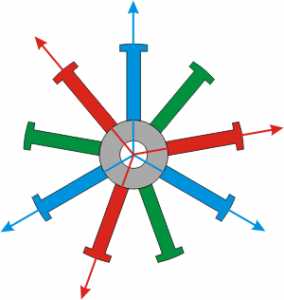
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться “шагами” на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы “на пальцах”
Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным моторам:
www.avislab.com
Машинные двигатели и бесщеточные двигатели 2019
Электродвигатели постоянного тока с мотором работают с конца 1800-х годов, в основном используются для кранов, электромоторов и сталепрокатных станов. Но в последнее время они были вытеснены их бесщеточными коллегами. Любой специалист должен понимать разницу между щеткой и бесщеточными двигателями.
Как следует из названия, это, конечно, кисти, но есть нечто большее, чем кажется. Ну, они оба по сути одинаковы, когда дело доходит до того, как они работают. Хотя принцип, по которому они работают внутри, является совершенно таким же, они в основном отличаются тем, как электрический ток направляется на электромагниты, поддерживая электромоторное отталкивание / притяжение, в результате чего ротор продолжает вращаться.
Хотя это кисти, которые делают все так или иначе, многие люди не смогут понять, что именно означают кисти. Давайте посмотрим на них и поймем разницу между ними.
Что такое мостовой двигатель постоянного тока?
Мощенные двигатели постоянного тока — один из простейших типов двигателей постоянного тока, используемых с конца 1800-х годов. Обычно он состоит из пары постоянных магнитов в качестве «статора» и катушки двигателя в качестве «ротора», подключенного к коммутатору.
Постоянные магниты всегда устанавливаются на статоре, а токопроводящие проводники всегда расположены на поворотной части. Они практически питаются от источника постоянного тока, а ток передается на катушки металлическими щетками, которые вращаются вместе с ротором. Хотя они достаточно эффективны, но требуют периодического обслуживания кистей.
Что такое бесщеточный двигатель постоянного тока?
Бесщеточные двигатели постоянного тока не используют коммутацию для регулирования тока в катушках; вместо этого они питаются от источника постоянного тока через встроенный источник питания, который производит электрический сигнал переменного тока, приводящий в движение двигатель.
В отличие от шлифованных моторов постоянные магниты всегда прикрепляются к ротору, а токопроводящие проводники расположены на статоре. То, что сделано с помощью щетки в механических машинах механически, осуществляется практически с помощью электроники бесщеточного контроллера постоянного тока.
Разница между матовыми и бесщеточными двигателями
Основы Brushed Vs. Бесщеточные двигатели
Оба мостовых и бесщеточных двигателя постоянного тока по существу одинаковы, когда дело доходит до принципа работы.
Разница заключается, главным образом, в эффективности и, по эффективности, означает, что общая мощность, потребляемая двигателем, который превращается в вращательное усилие, теряется до высокой температуры.
Щеточный двигатель постоянного тока является одним из простейших типов двигателей, работающих на источнике постоянного тока, где щеточки внутри двигателя подают ток на обмотки п
ru.esdifferent.com
«Бесколлекторные двигатели» ЛикБез и проектирование — Паркфлаер
Принцип работы электрического двигателя:В основу работы любой электрической машины положено явление электромагнитной индукции. Поэтому если в магнитное поле поместить рамку с током, то на неё подействует сила Ампера, которая создаст вращательный момент. Рамка начнет поворачиваться и остановится в положении отсутствия момента, создаваемого силой Ампера.
Устройство электрического двигателя:
Любой электрический двигатель состоит из неподвижной части — Статора и подвижной части — Ротора. Для того чтобы началось вращение, нужно по очереди менять направление тока. Эту функцию и выполняет Коллектор (щетки).
Бесколлекторный двигатель — это двигатель ПОСТОЯННОГО ТОКА без коллектора, в котором функции коллектора выполняет электроника. (Если у двигателя три провода, это не значит что он работает от трехфазного переменного тока! А работает он от «порций» коротких импульсов постоянного тока, и не хочу вас шокировать, но те же двигатели которые используются в кулерах, тоже бесколлекторные, хоть они и имеют всего два провода питания постоянного тока)
Устройство бесколлекторного двигателя:
Inrunner (произносится как «инраннер»). Двигатель имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
Outrunner (произносится как «аутраннер»). Двигатель имеет неподвижные обмотки (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами.
Принцип работы:
Для того чтобы бесколлекторный двигатель начал вращаться, напряжение на обмотки двигателя надо подавать синхронно. Синхронизация может быть организованна с использованием внешних датчиков (оптические или датчики холла), так и на основе противоЭДС (бездатчиковый), которая возникает в двигателе при его вращении.
Бездатчиковое управление:
Существуют бесколлекторные двигатели без каких либо датчиков положения. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на свободной фазе. Мы помним, что в каждый момент времени к одной из фаз (А) подключен «+» к другой (В) «-» питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС (т.е. в следствии закона электромагнитной индукции в катушке образуется индукционный ток) в свободной обмотке. По мере вращения напряжение на свободной фазе (С) изменяется. Измеряя напряжение на свободной фазе, можно определить момент переключения к следующему положению ротора.
Что бы измерить это напряжение изпользуется метод «виртуальной точки». Суть заключается в том, что, зная сопротивление всех обмоток и начальное напряжение, можно виртуально «переложить провод» в место соединения всех обмоток:
Регулятор скорости бесколлекторного двигателя:
Бесколлекторный двигатель без электроники — просто железка, т.к. при отсутствии регулятора, мы не можем просто подключить напряжение на него, чтоб он просто начал нормальное вращение. Регулятор скорости — это довольно сложная система радиокомпонентов, т.к. она должна:
1) Определять начальное положение ротора для запуска электродвигателя
2) Управлять электродвигателем на низких скоростях
3) Разгонять электродвигатель до номинальной (заданной) скорости вращения
4) Поддерживать максимальный момент вращения
Принципиальная схема регулятора скорости (вентильная):
Бесколлекторные двигатели были придуманы на заре появления электричества, однако систему управления к ним никто не мог сделать. И только с развитием электроники: с появлением мощных полупроводниковых транзисторов и микроконтроллеров, бесколлекторные двигатели стали применятся в быту (первое промышленное использование в 60-х годах).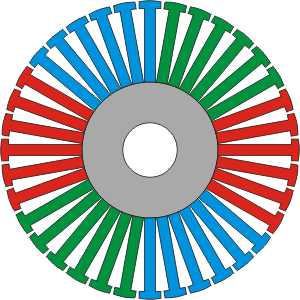
Достоинства и недостатки бесколлекторных двигателей:
Достоинства:
-Частота вращения изменяется в широком диапазоне
-Возможность использования во взрывоопасной и агрессивной среде
-Большая перегрузочная способность по моменту
-Высокие энергетические показатели (КПД более 90 %)
-Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
-Относительно сложная система управления двигателем
-Высокая стоимость двигателя, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы)
Разобравшись с теорией, перейдем к практике: спроектируем и сделаем двигатель для пилотажной модели МХ-2.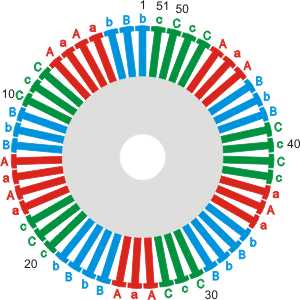
Список материалов и оборудования:
1) Проволока (взятая из старых трансформаторов)
2) Магниты (купленные в интернете)
3) Статор (барашек)
4) Вал
5) Подшипники
6) Дюралюминий
7) Термоусадка
8) Доспуп к неограниченному техническому хламу
9) Доступ к инструментам
10) Прямые руки 🙂
Ход работы:
1) С самого начала решаем:
Для чего делаем двигатель?
На что он должен быть рассчитан?
В чем мы ограничены?
В моем случае: я делаю двигатель для самолета, значит пускай он будет внешнего вращения; рассчитан он должен на то, что он должен выдать 1400 грамм тяги при трех-баночном аккумуляторе; ограничен я в весе и в размере. Однако с чего же начать? Ответ на этот вопрос прост: с самой трудной детали, т.е. с такой детали, которую легче просто найти, а все остальное подгонять под неё. Я так и поступил. После многих неудачных попыток сделать статор из листовой мягкой стали, мне стало понятно, что лучше найти её. Нашел я её в старой видеоголовке от видеорекоудора.
2) Обмотка трехфазного бесколлекторного двигателя выполняется изолированным медным проводом, от сечения которого зависит значение силы тока, а значит и мощность двигателя. Незабываем что, чем толще проволока, тем больше оборотов, но слабее крутящий момент. Подбор сечения:
1А — 0.05мм; 15А — 0.33мм; 40А — 0.7мм
3А — 0.11мм; 20А — 0.4мм; 50А — 0.8мм
10А — 0.25мм; 30А — 0.55мм; 60А — 0.95мм 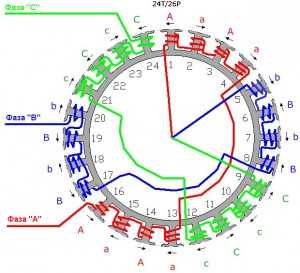
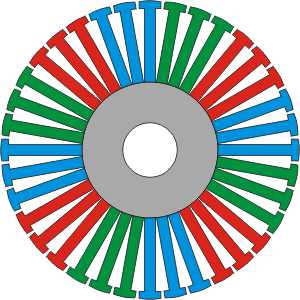
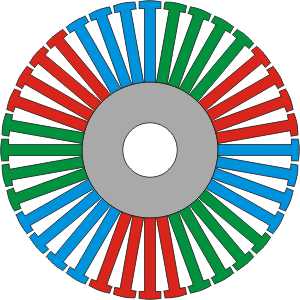
3) Начинаем наматывать на полюса проволоку. Чем больше витков (13) намотано на зуб, тем большее магнитное поле. Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов. Для получения высоких оборотов, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
4) Дальше выбираем способ соединения обмотки: звездой или треугольником. Соединение звездой дает больший крутящий момент, но меньшее количество оборотов, чем соединение треугольником в 1.73 раз. (впоследствии было выбрано соединение треугольник) 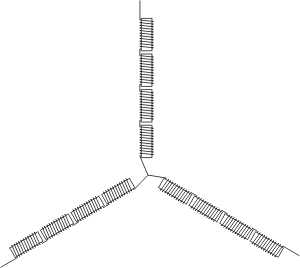
5) Выбираем магниты. Количество полюсов на роторе должно быть четным (14). Форма применяемых магнитов обычно прямоугольная. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. Также чем больше количество полюсов, тем больше момент, но меньше оборотов. Магниты на роторе закрепляются с помощью специального термоклея. 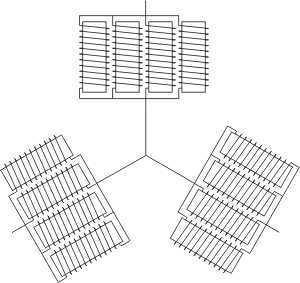
Испытания данного двигателя я проводил на созданной мной витномоторной установке, которая позволяет измерить тягу, мощность и обороты двигателя.
Чтобы увидеть отличия соединений «звезда» и «треугольник» я соединял по разному обмотки:
В итоге получился двигатель соответствующий характеристикам самолета, масса которого 1400 грамм. 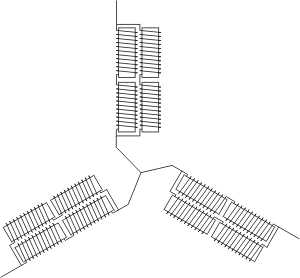
Характеристики полученного двигателя:
Потребляемый ток: 34.1А
Ток холостого хода: 2.1А
Сопротивление обмоток: 0.02 Ом
Количество полюсов: 14
Обороты: 8400 об/мин
Видеоотчет испытания двигателя на самолете… Мягкой посадки 😀
Расчет КПД двигателя:
Очень хороший показатель… Хотя можно было еще выше добиться…
Выводы:
1) У бесколлекторных двигателей высокая эффективность и КПД
2) Бесколлекторные двигатели компактны
3) Бесколлекторные двигатели можно использовать во взрывоопасных средах
4) Соединение звездой дает больший крутящий момент, но меньшее количество оборотов в 1.73 раза, чем соединение треугольником.
Таким образом, изготовить собственный бесколлекторный мотор для пилотажной модели самолета- задача выполнимая
Если у вас есть вопросы или вам что-то не понятно, задавайте мне вопросы в комметариях этой статьи. Удачи всем)
www.parkflyer.ru