Почему бесщеточные электродвигатели набирают популярность?
Все больше самых различных моделей электроинструментов применяют на себе бесщеточные электродвигатели. Дело доходит даже до отбойных молотков
Прогресс не стоит на месте, то и дело внедряются новые разработки, благодаря которым техника становится лучше и совершеннее. Так, на смену классических электрических двигателей постепенно приходят бесщеточные (вентильные). Стоит подробнее рассказать о том, по какому принципу они работают, чем отличаются от обычных и в чем их превосходят.
Принцип работы бесщеточного двигателя
В бесщеточном двигателе щеточно-коллекторный узел заменен полупроводниковым коммутатором. Он работает за счет электрических приводов, которые создают магнитное вращающееся поле. Это конструкция нового типа, в которой обмотки на статоре или элементах ротора нет. Разработка такого двигателя – результат использования материалов с большой коэрцитивной силой и уровнем магнитного насыщения, позволяющим получить сильное магнитное поле.
Отсутствие обмотки ротора и механических коммутационных элементов – те технические решения, которые позволяют создавать надежные двигатели по доступной цене. Эти решения существенно упрощают сам процесс их изготовления.
Бесщеточный двигатель может работать как на переменном, так и на непрерывном токе. В случае с непрерывным током он похож на коллекторный двигатель, но у последнего более сложная конструкция, так как основа непременно содержит электронный коммутатор.
Характерные особенности и преимущества бесщеточных двигателей
Бесщеточный двигатель имеет функционал щеточного, но превосходит его по ряду параметров. Единственным его недостатком можно назвать то, что по стоимости он пока превосходит аналоги с классическим мотором, но этот момент в полной мере компенсируется большим перечнем достоинств устройства. Основные преимущества механизма:
- эффективность;
- при намагничивании нет изменений, как и при утечке тока;
- энергонасыщенность;
- скорость вращения и вращающий момент полностью соответствуют;
- большой диапазон смены частоты вращения;
- скорость не зависит от центробежной силы;
- нет узлов, которые нужно часто обслуживать;
- в конструкции применяются легкие и небольшие магниты;
- не нужны коммутатор и обмотка возбуждения.

Сферы применения бесщеточных двигателей
Вентильные двигатели постоянного тока, как правило, применяются для оборудования с мощностью не выше 5 кВт. Для оборудования мощнее использовать такие двигатели нецелесообразно. Постоянные магниты в бесщеточных моторах очень чувствительны к воздействию мощных полей и высоких температур, что нехарактерно для щеточных и индукционных аналогов.
Бесщеточные двигатели надежны и хорошо управляемы, поэтому они используются повсеместно, как для мелких механизмов, так и для крупных. Они применяются в автомобильных приводах, электрических мотоциклах, компьютерах, электроинструменте, бытовой технике. Двигатели очень востребованы в промышленности, авиационной технике. Благодаря отсутствию коллекторного узла такие двигатели можно использовать даже в опасных условиях, местах с повышенным уровнем влажности.
Metabo выходит на новый уровень, внедряя бесщеточные двигатели в свою технику
Компания Metabo летом 2019 года презентовала широкой аудитории инновационную для отечественного рынка серию отбойных молотков и сетевых перфораторов SDS-Max. Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Устройства этой линейки оснащены бесщеточными двигателями, что выгодно отличает их от большинства аналогов. В сетевом инструменте такие двигатели пока применяются не слишком часто, особенно если инструмент очень мощный.
Сетевые инструменты с бесщеточными двигателями обладают всеми теми же преимуществами, что и аккумуляторные инструменты. Ключевые достоинства:
- Бесколлекторная схема повышает КПД мотора. Если сравнить бесщеточный перфоратор Metabo с обыкновенным, то при равном потреблении сетевой мощности оборудование Metabo будет меньше греться и выполнит больше функций.
- Высокая надежность. Инструмент с вентильным двигателем имеет более длительный срок эксплуатации, чем обычный, и не нуждается в частом обслуживании. В нем не нужно будет менять щетки, поэтому расходы на ремонт и обслуживания будут существенно снижены. По технике с высоким уровнем вибрации, как отбойные молотки и перфораторы, преимущество отсутствия щеток в двигателе особенно заметно.
 Из-за колебаний, однозначно возникающих при долблении и бурении, срок службы щеток в разы сокращается. Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит.
Из-за колебаний, однозначно возникающих при долблении и бурении, срок службы щеток в разы сокращается. Бесщеточным перфораторам и отбойным молоткам Metabo это не грозит. - Частоту вращения мотора легко регулировать и поддерживать на необходимом уровне, даже при увеличении нагрузки, перепадах напряжения, ухудшении формы напряжения. Бесщеточные перфораторы и отбойные молотки Metabo будут высокопроизводительны даже при эксплуатации в сложных условиях.
Бесщеточные двигатели обладают массой преимуществ, потому сфера их применения необычайно широка, они используются даже в космической промышленности и ракетостроении. Работающие на таких моторах механизмы с каждым днем становятся популярнее в самых разных сферах.
Бесколлекторный двигатель постоянного тока: принцип работы, варианты конструкций
Содержание:
Бесколлкторные двигатели постоянного тока (бдпт) являются разновидностью синхронных двигателей с постоянными магнитами, которые питаются от цепи постоянного тока через инвертор, управляемый контроллером с обратной связью.
Появились бесколлекторные двигатели постоянного тока как попытка избавить коллекторные двигатели постоянного тока с постоянными магнитами от их слабого места – щёточно-коллекторного узла. Этот узел, представляющий собой вращающийся электрический контакт, является слабым местом у коллекторных двигателей с точки зрения надёжности и в ряде случаев ограничивает их параметры.
Принцип работы и устройство бесколлекторного двигателя
Как и остальные двигатели, бесколлекторный двигатель состоит из двух основных частей – ротора (подвижная часть) и статора (неподвижная часть).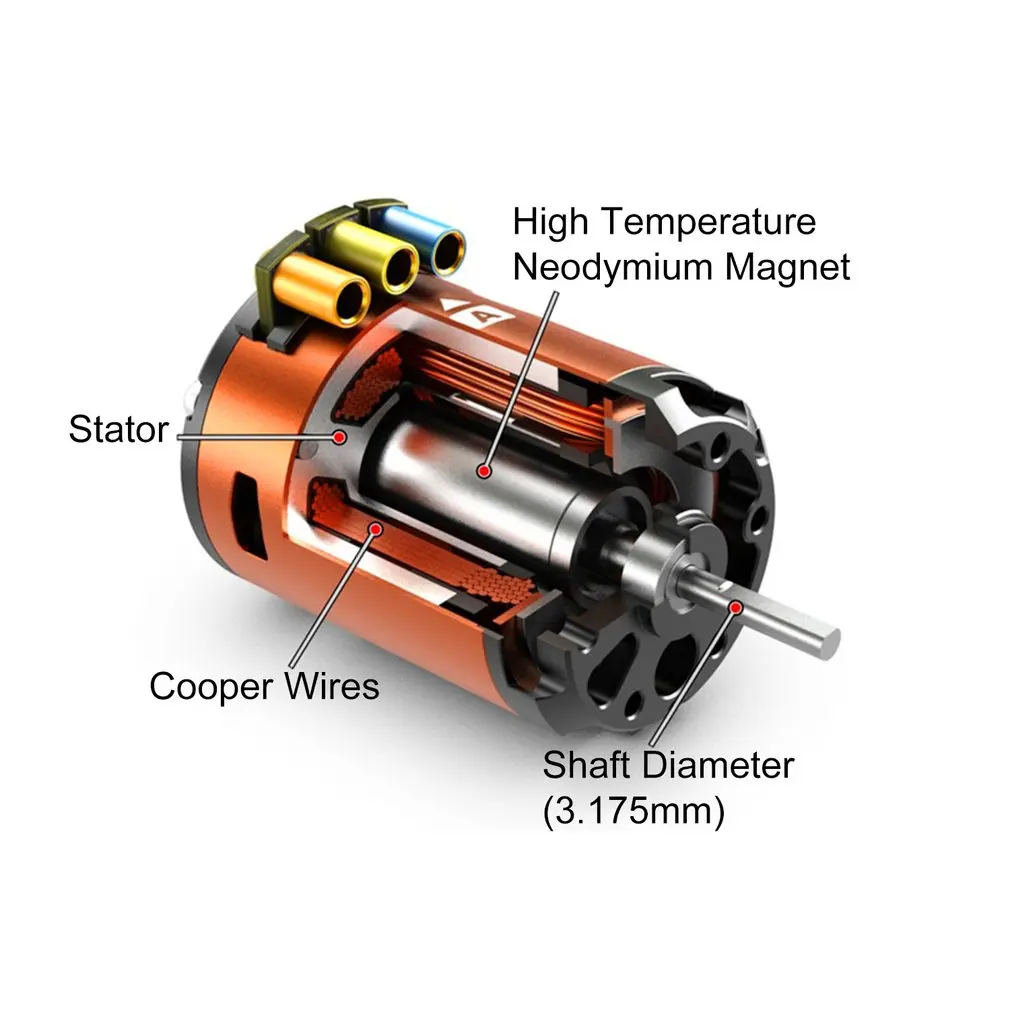

Варианты конструкции двигателя
Обмотка двигателя может иметь различную конструкцию. Обмотка классической конструкции наматывается на стальной сердечник. Другой вариант конструкции обмотки – это обмотка без стального сердечника. Проводники этой обмотки равномерно распределяются вдоль окружности статора. Характеристики обмотки получаются различными, что отражается и на характеристиках двигателя. Кроме того, обмотки могут быть выполнены на различное число фаз и с различным количеством пар полюсов.
Бесколлекторные двигатели также могут иметь конструкции, различающиеся по взаимному расположению ротора и статора. Наиболее распространена конструкция, когда ротор охватывается статором снаружи – двигатели с внутренним ротором. Но также возможна, и встречается на практике конструкция в которой ротор расположен снаружи статора – двигатели с внешним ротором. Третий вариант – статор расположен параллельно ротору и оба располагаются перпендикулярно оси вращения двигателя.
Датчик положения, который измеряет угловое положение ротора двигателя — это важная часть приводной системы, построенной на бесколлекторном двигателе. Этот датчик может быть самым разным как по типу, так и по принципу действия. Традиционно используемый для этой цели тип датчиков – датчики Холла с логическим выходом, устанавливаемые на каждую фазу двигателя. Выходные сигналы этих датчиков позволяют определить положение ротора с точностью до 60° — достаточной реализации самых простых способов управления обмотками. Для реализации способов управления двигателем, предполагающих формирование на обмотках двигателя системы синусоидальных напряжений при помощи ШИМ необходим более точный датчик, например, энкодер. Инкрементные энкодеры, очень широко используемые в современном электроприводе, могут обеспечить достаточно информации о положении ротора только при использовании их вместе с датчиками Холла. Если бесколлекторный двигатель оснащён абсолютным датчиком положения – абсолютным энкодером или резольвером (СКВТ), то датчики Холла становятся не нужны, так как любой из этих датчиков обеспечивает полную информацию о положении ротора.
Можно управлять бесколлекторным двигателем, и не используя датчика положения ротора – бездатчиковая коммутация. В этом случае информация о положении ротора восстанавливается на основании показаний других датчиков, например, датчиков фазных токов двигателя или датчиков напряжения. Такой способ управления часто влечёт за собой ряд недостатков (ограниченный диапазон скоростей, высокая чувствительность к параметрам двигателя, специальная процедура старта), что ограничивает его распространение.
Преимущества и недостатки
Высокая надёжность вследствие отсутствия коллектора. Это основное отличие бесколлекторных двигателей от коллекторных. Щёточно-коллекторный узел, является подвижным электрическим контактом и сам по себе имеет невысокую надёжность и устойчивость к влиянию различных воздействий со стороны окружающей среды.
Отсутствие необходимости обслуживания коллекторного узла. Является особенно актуальным для двигателей среднего и крупного габарита. Для микроэлектродвигателей, проведение ремонта экономически оправдано далеко не во всех случаях, поэтому для них этот пункт не является актуальным.
Сложная схема управления. Прямое следствие переноса функции переключения токов обмотки во внешний коммутатор. Если в простейшем случае для управления коллекторным двигателем необходимо иметь только источник питания, то для бесколлекторного двигателя такой подход не работает – контроллер нужен даже для решения самых простых задач управления движением. Однако, когда речь идёт о решении для сложных случаев (например, задачи позиционирования), то контроллер становится необходим для всех типов двигателей.
Высокая скорость вращения. В коллекторных двигателях скорость перемещения щётки по коллектору ограничена, хотя и различна для различных конструкций этих двух деталей и различных используемых материалов. Предельная скорость перемещения щёток по коллектору сильно ограничивает скорость вращения коллекторных двигателей. Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Бесколлекторные двигатели не имеют такого ограничения, что позволяет выполнять их для работы на скоростях до нескольких сотен тысяч оборотов в минуту – цифра недостижимая для коллекторных двигателей.
Большая удельная мощность. Возможность достичь большой удельной мощности является следствием высокой скорости вращения, доступной для бесколлекторного двигателя.
Хороший отвод тепла от обмотки. Обмотка бесколлекторных двигателей неподвижно закреплена на статоре и есть возможность обеспечить хороший тепловой контакт её с корпусом, который передаёт тепло, выделяемое в двигателе, в окружающую среду. У коллекторного двигателя обмотка установлена на роторе, и её тепловой контакт с корпусом гораздо хуже, чем у бесколлекторного двигателя.
Больше проводов для подключения. Когда двигатель расположен близко от контроллера, то это конечно не повод для огорчения. Однако если условия окружающей среды, в которых работает двигатель очень сложны, то вынесение управляющей электроники на значительное расстояние (десятки и сотни метров) от двигателя является подчас единственным доступным вариантом для разработчиков системы.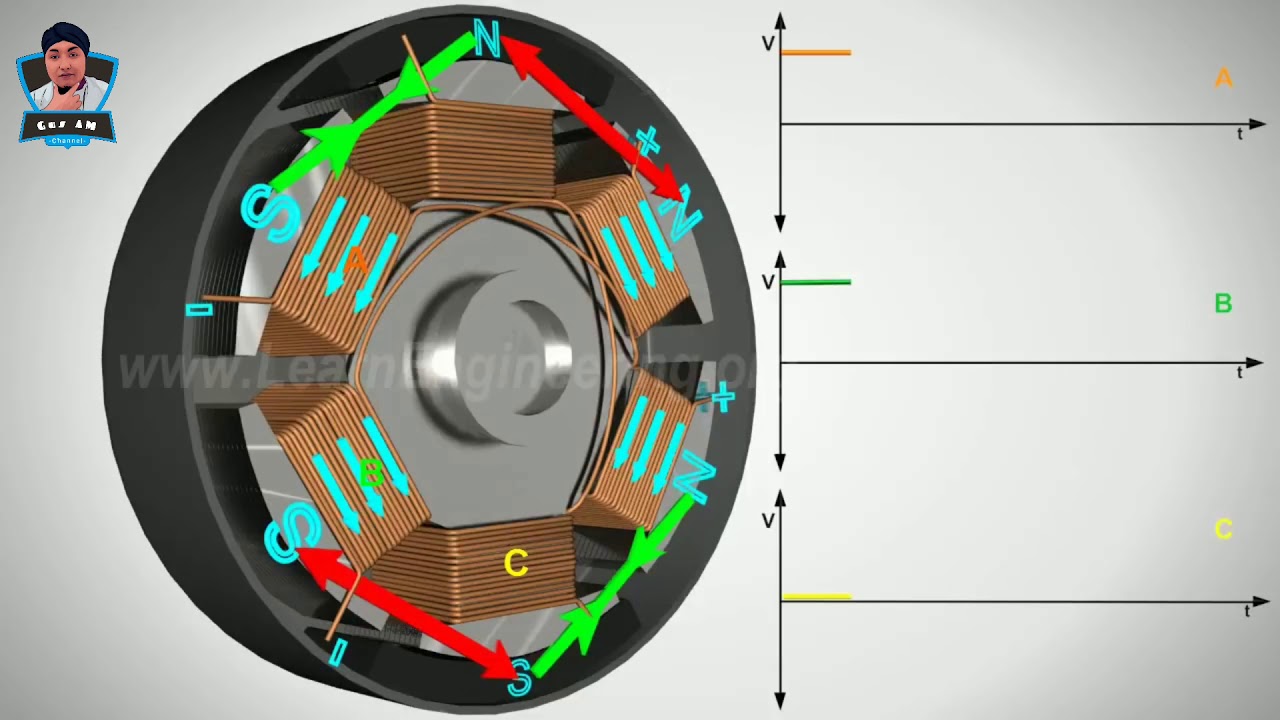 В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
В таких условиях каждая дополнительная цепь для подключения двигателя, будет требовать дополнительных жил в кабеле, увеличивая его размеры и массу.
Уменьшение электромагнитных помех, исходящих от двигателя. Щёточно-коллекторный контакт создаёт при работе достаточно сильные помехи. Частота этих помех зависит от частоты вращения двигателя, что осложняет борьбу с ними. У бесколлекторного двигателя единственным источником помех является ШИМ силовых ключей, частота которого обычно постоянна.
Присутствие сложных электронных компонентов. Электронные компоненты (датчики Холла, например) более остальных составных частей двигателя уязвимы для действия жёстких условий со стороны внешней среды, будь то высокая температура, низкая температура или ионизирующие излучения. Коллекторные двигатели не содержат электроники и у них подобная уязвимость отсутствует.
Где применяются бесколлекторные двигатели
К настоящему времени бесколлекторные двигатели получили широкое распространение, как благодаря своей высокой надёжности, высокой удельной мощности и возможности работать на высокой скорости, так и из-за быстрого развития полупроводниковой техники, сделавшей доступными мощные и компактные контроллеры для управления этими двигателями.
Бесколлекторные двигатели широко применяются в тех системах где их характеристики дают им преимущество перед двигателями других типов. Например, там, где требуется скорость вращения несколько десятков тысяч оборотов в минуту. Если от изделия требуется большой срок службы, а ремонт невозможен или ограничен из-за особенностей эксплуатации изделия, то и тогда бесколлекторный двигатель будет хорошим выбором.
Читать дальше:Бесколлекторный двигатель постоянного тока: принцип работы, устройство, применение
Бытовая и медицинская техника, авиамоделирование, трубозапорные приводы газо- и нефтепроводов – это далеко не полный перечень областей применения бесколлекторных двигателей (БД) постоянного тока. Давайте рассмотрим устройство и принцип действия этих электромеханических приводов, чтобы лучше понять их достоинства и недостатки.
Общие сведения, устройство, сфера применения
Одна из причин проявления интереса к БД — это возросшая потребность в высокооборотных микродвигателях, обладающих точным позиционированием. Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Внутренне устройство таких приводов продемонстрировано на рисунке 2.
Как видите, конструкция представляет собой ротор (якорь) и статор, на первом имеется постоянный магнит (или несколько магнитов, расположенных в определенном порядке), а второй оборудован катушками (В) для создания магнитного поля.
Примечательно, что эти электромагнитные механизмы могут быть как с внутренним якорем (именно такой тип конструкции можно увидеть на рисунке 2), так и внешним (см. рис. 3).
Рис. 3. Конструкция с внешним якорем (outrunner)Соответственно, каждая из конструкций имеет определенную сферу применения. Устройства с внутренним якорем обладают высокой скоростью вращения, поэтому используются в системах охлаждения, в качестве силовых установок дронов и т.д. Приводы с внешним ротором используются там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту (робототехника, медицинское оборудование, станки ЧПУ и т.д.).
Принцип работы
В отличие от других приводов, например, асинхронной машины переменного тока, для работы БД необходим специальный контроллер, который включает обмотки таким образом, чтобы векторы магнитных полей якоря и статора были ортогональны друг к другу. То есть, по сути, устройство-драйвер регулирует вращающий момент, действующий на якорь БД. Наглядно этот процесс продемонстрирован на рисунке 4.
Фазы работы бесколлекторного приводаКак видим, для каждого перемещения якоря необходимо выполнять определенную коммутацию в обмотке статора двигателя бесколлекторного типа. Такой принцип работы не позволяет плавно управлять вращением, но дает возможность быстро набрать обороты.
Отличия коллекторного и бесколлекторного двигателя
Привод коллекторного типа отличается от БД как конструктивными особенностями (см. рис 5.), так и принципом работы.
Рис. 5. А – коллекторный двигатель, В – бесколлекторныйРассмотрим конструктивные отличия. Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Из рисунка 5 видно, что ротор (1 на рис. 5) двигателя коллекторного типа, в отличие от бесколлекторного, имеет катушки, у которых простая схема намотки, а постоянные магниты (как правило, два) установлены на статоре (2 на рис. 5). Помимо этого на валу установлен коллектор, к которому подключаются щетки, подающие напряжение на обмотки якоря.
Кратко расскажем о принципе работы коллекторных машин. Когда на одну из катушек подается напряжение, происходит ее возбуждение, и образуется магнитное поле. Оно вступает во взаимодействие с постоянными магнитами, это заставляет проворачиваться якорь и размещенный на нем коллектор. В результате питание подается на другую обмотку и цикл повторяется.
Частота вращения якоря такой конструкции напрямую зависит от интенсивности магнитного поля, которое, в свою очередь, прямо пропорционально напряжению. То есть, чтобы увеличить или уменьшить обороты, достаточно повысить или снизить уровень питания. А для реверса необходимо переключить полярность. Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Такой способ управления не требует специального контролера, поскольку регулятор хода можно сделать на базе переменного резистора, а обычный переключатель будет работать как инвертор.
Конструктивные особенности двигателей бесколлекторного типа мы рассматривали в предыдущем разделе. Как вы помните, их подключение требует наличия специального контролера, без которого они просто не будут работать. По этой же причине эти двигатели не могут использоваться как генератор.
Стоит также отметить, что в некоторых приводах данного типа для более эффективного управления отслеживаются положения ротора при помощи датчиков Холла. Это существенно улучшает характеристики бесколлекторных двигателей, но приводит к удорожанию и так недешевой конструкции.
Как запустить бесколлекторный двигатель?
Чтобы заставить работать приводы данного типа, потребуется специальный контроллер (см. рис. 6). Без него запуск невозможен.
Рис. 6. Контроллеры бесколлекторных двигателей для моделизмаСобирать самому такое устройство нет смысла, дешевле и надежней будет приобрести готовый. Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
Подобрать его можно по следующим характеристикам, свойственным драйверам шим каналов:
- Максимально допустимая сила тока, эта характеристика приводится для штатного режима работы устройства. Довольно часто производители указывают такой параметр в названии модели (например, Phoenix-18). В некоторых случаях приводится значение для пикового режима, который контролер может поддерживать несколько секунд.
- Максимальная величина штатного напряжения для продолжительной работы.
- Сопротивление внутренних цепей контроллера.
- Допустимое число оборотов, указывается в rpm. Сверх этого значения контроллер не позволит увеличить вращение (ограничение реализовано на программном уровне). Следует обратить внимание, что частота вращения всегда приводится для двухполюсных приводов. Если пар полюсов больше, следует разделить значение на их количество. Например, указано число 60000 rpm, следовательно, для 6-и магнитного двигателя частота вращения составит 60000/3=20000 prm.
- Частота генерируемых импульсов, у большинства контролеров этот параметр лежит в пределах от 7 до 8 кГц, более дорогие модели позволяют перепрограммировать параметр, увеличив его до 16 или 32 кГц.

Обратим внимание, что первые три характеристики определяют мощность БД.
Управление бесколлекторным двигателем
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Трёхфазный бесколлекторный электродвигатель постоянного тока
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).
Рисунок 7. Диаграммы напряжений БДЧтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.

- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.
Рис. 8. Многофункциональный контроллер управления бесколлекторным двигателемПреимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.

- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Что такое бесщеточный мотор, принцип работы и применение
Сегодня в эпоху ежедневных открытий и инноваций, в производстве электротехники все чаще используются бесщеточные двигатели. Одним из главных преимуществ этих моторов – это наивысший коэффициент мощности к весу, быстрый ход, и электронное управление.
Широко применяется в периферийные устройствах компьютера (принтер, дисковод), ручных электроинструментах (шуруповерты, дрели, мультиинструменты, угловые шлифовальные машины, цепные пилы…), в беспилотных летательных машинах, электромобилях и в автомобилестроении и т.п.
В ближайшие годы можно ожидать большое количество производителей, адаптирующих эту технологию. По мере того как технология развивается, и в условиях достаточного спроса на бесщеточные технологии можно увидеть еще более широкий спектр их использования.
Сама технология, данного вида моторов не нова, и впервые в коммерческом производстве нашла свое применение еще в конце 60-х годов прошлого века.
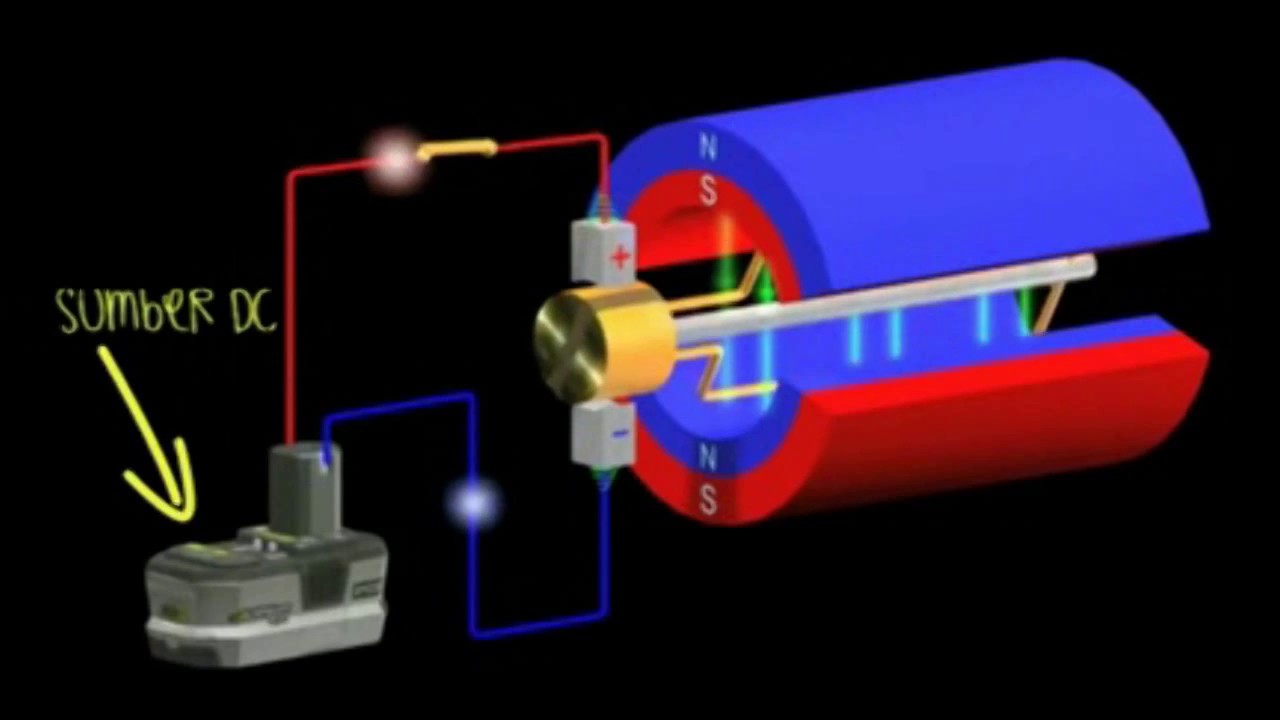
Давайте начнем с самого начала. Думаю, что практически весь электроинструмент в Вашей линейке домашних инструментов, почти на 90% состоит из двигателей с угольными щетками. Давайте быстро посмотрим на традиционный электрический двигатель (коллекторный мотор), он будет содержать несколько основных компонентов: ротор (или якорь), коммутатор, щетки, статор (полевой магнит).
Электрический ток подается к графитовым щеткам, которые физически прикасаются к коммутатору на якоре, создается электромагнитное поле и якорь (ротор) начинает двигаться в статоре. Основной принцип заключается в том, что чем больше тока поступает через щетки на якорь, тем сильнее создаётся магнитное поле, и соответственно более быстрое вращение.
Обычные коллекторные моторы просты и недороги в изготовлении, но имеют несколько факторов по которым уступают безщеточным (блочным) моторам.
Недостатки:
– Трение, вызванное механическим контактом щеток с коммутатором, приводит к потере электроэнергии, контактному износу щеток и образованию тепла, а это значительно снижает производительность двигателя, а также снижает его долговечность.
– После нагрева мотор долго остывает, это вызвано расположением электромагнита внутри, на якоре мотора.
– Электрографитовые щетки требуют постоянного контроля и своевременного обслуживания или замены.
– В процессе электромагнитного взаимодействие образуется электрическая дуга на щетках (искрение) и образование электропомех (для более взрослого поколения, всем знакомый искаженный сигнал радиоприемника или телевизора во время работы электробритвы соседа).
Бесщеточные двигатели (бесколлекторные моторы)более эффективны в преобразовании электрической энергии в механическую. У них нет необходимости в электрографитовых щетках, соответственно нет и коммутатора якоря, но это не единственные различия. В коллекторном моторе, постоянный магнит установлен на вращающемся якоре ( роторе ). Якорь в свою очередь находится между двумя электромагнитами, установленными в статоре. Когда ток подается к электромагниту создается магнитное поле и якорь начинает движение в статоре. Скорость вращения регулируется через внешний электронный регулятор скорости (по сути электронная плата) а не через щетки, как в щеточном двигателе.
Бесщеточные двигатели все чаще заменяют привычные двигатели из-за их высокой эффективности, высокому показателями крутящего момента, долговечностью и высокой скоростью работы.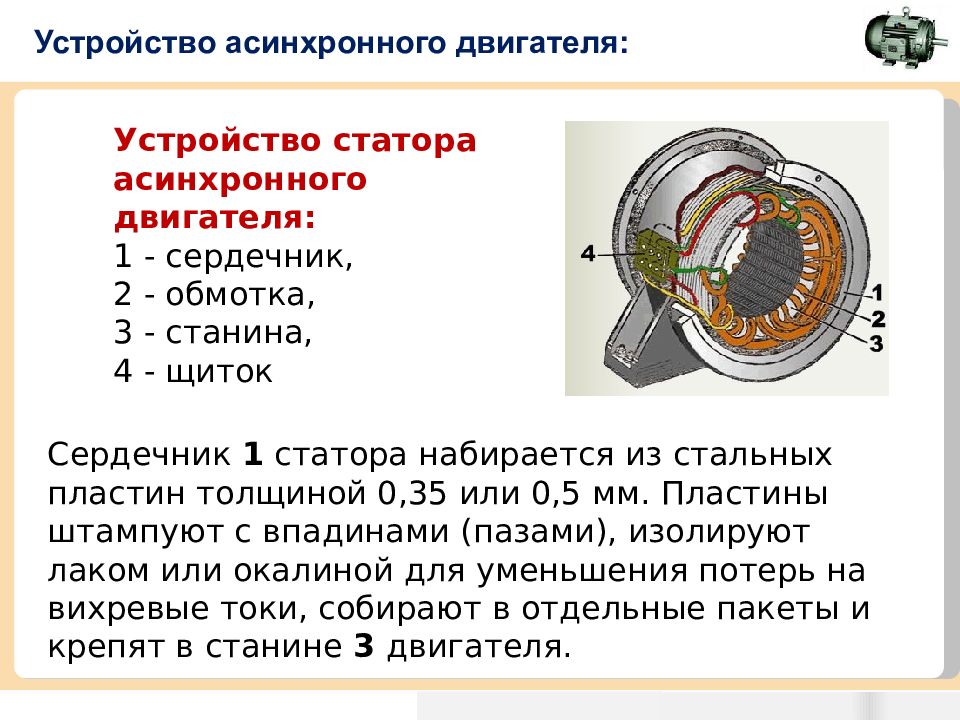 Их применение в прошлом было сильно ограничено из-за высокой стоимости, в основном за счет дороговизны электронной системы управления двигателя, сегодня эта технология доступна практически во всех сферах электротехнического оборудования и инструментов.
Их применение в прошлом было сильно ограничено из-за высокой стоимости, в основном за счет дороговизны электронной системы управления двигателя, сегодня эта технология доступна практически во всех сферах электротехнического оборудования и инструментов.
Обширное применение, обусловлено низким показателем потраченной энергии необходимой для работы устройств. Так, беспроводные инструменты (дрели, болгарки) с питанием от аккумуляторный батарей используют бесщеточные двигатели для повышения эффективности привода, и увеличения срока службы батарей.
В пылесосах нового поколения с точной регулировкой силы всасывания воздуха, задействован этот вид двигателя, он обеспечивает высокий крутящий момент, а также низкий уровень шума и имеет малый вес.
Мелкая бытовая техника, как правило, производится в очень больших объемах. Поэтому одним из важнейших требований является экономичность, возможность тонкой регулировки скорости и надежности изделий. Поэтому в жестких дисках, насосах, вентиляторах, кофе машинах, фенах для волос, миксерах и блендерах, проигрывателях CD/DVD дисков применимы эти универсальные помощники.
-Отсутствие щеток обеспечивает низкое трение во время работы и приводит к уменьшению выделяемого тепла от мотора, увеличивая время беспрерывной работы.
-Высокая эффективность агрегата помогает увеличивать время работы батарей до 50%.
-При работе мотора не выделяются искры (как в обычном электромоторе с щетками)
-КПД преобразования электрической энергии во вращательную достигает 85-90%, в щеточных двигателях этот показатель 75-80%.
-Высокая перегрузочная способность, большой срок службы.
Please follow and like us:
Управление бесколлекторным двигателем постоянного тока, принцип работы
Содержание
- Преимущества бесколлекторного двигателя
- Как работает бесколлекторный двигатель постоянного тока
- Управление бесколлекторным двигателем постоянного тока
Бесколлекторные двигатели применяются в самых разных областях, так как это надежные, долговечные и стойкие к поломкам агрегаты.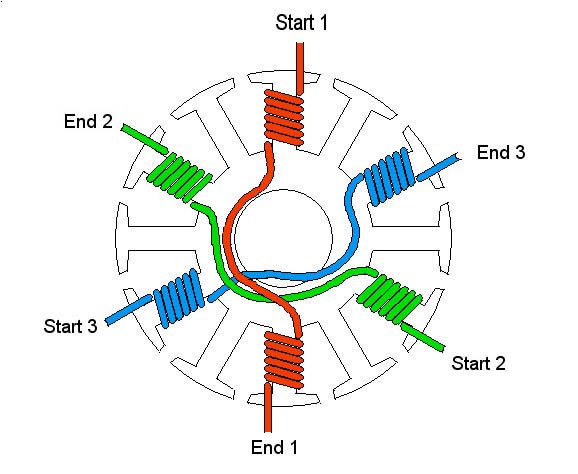 В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
В быту чаще всего используется двигатель постоянного тока на 12 вольт, но бывают модели с большей мощностью.
Преимущества бесколлекторного двигателя
По сравнению со своими коллекторными «собратьями» бесколлекторные механизмы обладают некоторыми преимуществами:
- Компактность и небольшой вес. Двигатели можно установить на маленькие устройства.
- Очень высокий КПД. Их использование выгодно.
- Отсутствие контактов переключения и крутящего момента. Поскольку функции постоянных магнитов выполняют транзисторы МОП, источники потерь отсутствуют.
- Отсутствие стирающихся и ломающихся элементов.
- Широкий диапазон изменения скорости вращения.
- Способность переносить большую нагрузку по моменту.
Бесколлекторный двигатель оснащается электронным блоком управления, который стоит достаточно дорого – это, пожалуй, единственный его недостаток.
Как работает бесколлекторный двигатель постоянного тока
Принцип работы бесколлекторного двигателя постоянного тока тот же, что и у агрегатов других моделей.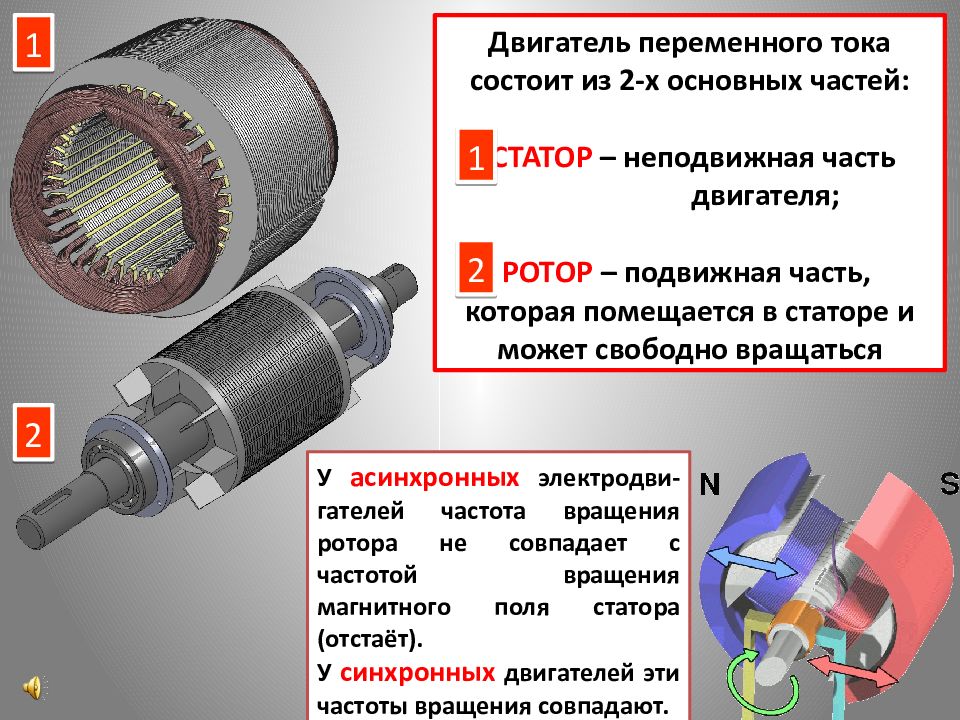 Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Но, как видно из названия, основная особенность механизма – отсутствие коллектора (этот узел сложен, тяжел, требует обслуживания и может искрить). Роль ротора выполняет шпиндель, вокруг которого установлены проволочные обмотки с разными магнитными полями. Количество прямоугольных магнитов, установленных у ротора, может быть разным, но обязательно четным (как и число полюсов). В случае если несколько магнитов составляют один полюс, число полюсов меньше числа магнитов.
Вращение достигается благодаря смене направления магнитного поля в определенной последовательности. Взаимодействуя с магнитными полями ротора, постоянные магниты приводят статор в движение. От их мощности зависит момент силы.
Управление бесколлекторным двигателем постоянного тока
В двигателях подобного типа управление коммутацией осуществляется с помощью электроники. Регуляторы хода бывают двух видов:
- Без датчиков, используемые при отсутствии существенного изменения пускового момента или необходимости в управлении позиционированием (в вентиляторе).
 Широкое распространение этого вида регуляторов объясняется простотой их изготовления.
Широкое распространение этого вида регуляторов объясняется простотой их изготовления. - С датчиками, устанавливаемые в агрегатах с существенным варьированием пускового момента (в низкооборотистых механизмах).
Положение ротора при подаче токовых сил на обмотки определяется электронной системой и датчиком положения. Наиболее распространены следующие типы датчиков:
- Датчик Холла. Этот узел изменяет свои выводы при переключении обмоток. Для измерения тока и частоты вращения применяется устройство с разомкнутым контуром. К датчику присоединяются три ввода. При изменении показаний запускается переработка прерывания. Если нужно обеспечить быстрое реагирование обработки прерывания, датчик следует подключить к младшим выводам порта.
- Датчик положения с микроконтроллером. Управление бесколлекторным двигателем постоянного тока осуществляется с помощью AVR ядра (чипа для выполнения тех или иных задач). Программа, вшитая в плату AVR, максимально быстро запускает двигатель при отсутствии дополнительных внешних приборов и управляет скоростью.

- Система arduino. Эта аппаратная вычислительная платформа представляет собой плату, состоящую из микроконтроллера Atmel AVR и элементарной обвязки программирования. Ее задача – конвертирование сигналов с одного уровня на другой. Нужную программу можно установить через USB.
Для устранения погрешностей в определении положении ротора, провода при подключении контроллера делают максимально короткими (12-16 см). Среди программных настроек контроллеров можно перечислить:
- смену направления;
- плавное выключение и торможение;
- ограничение тока;
- опережение КПД и мощности;
- жесткое/плавное выключение;
- быстрый/жесткий/мягкий старт;
- режим газа.
Некоторые модели контроллеров содержат драйвера двигателя, что дает возможность его запуска напрямую, без установки дополнительных драйверов.
Как работает бесколлекторный мотор — HPI Racing
HPI предлагает для всех типов радиоуправляемых электроавтомоделей великолепную бесколлекторную систему Flux Brushless System! Бесколлекторная система Flux идеально подходит для шоссейных автомоделей, моделей багги и внедорожников в масштабе 1/10 и позволяет разогнать эти машины до скорости почти 100 километров в час!
Flux Brushless System состоит из
электронного регулятора скорости и бесколлекторного
двигателя.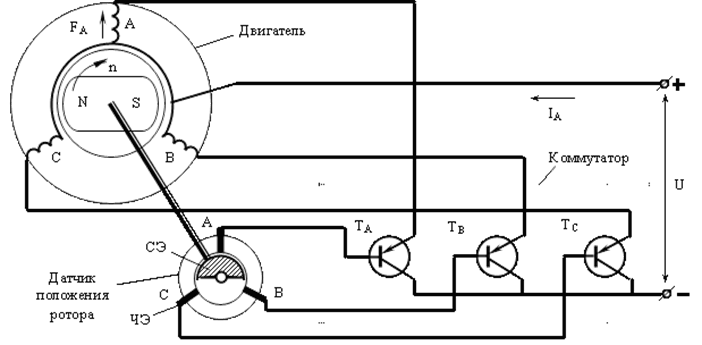
Бесколлекторный двигатель — это лучший выбор почти для всех электроавтомоделей в масштабе 1/10. С таким мотором ваша модель станет сверхбыстрой на трассе и сможет развивать бешенную скорость! Со стандартным никель-металлогидридным аккумулятором, состоящим из 6-и элементов, или с 2S LiPo (7,4 вольт) аккумулятором вы можете получить до 60 км/ч даже со стандартным редуктором! Мощность бесколлекторного мотора Flux эквивалентна высокофорсированным коллекторным 9 – 10 витковым двигателям, работающих от шести элементных NiMH батарей, а это огромная мощность!
Особенности бесколлекторных двигателей Flux:
- Мощный, высокоскоростной бесколлекторныый мотор – эквивалент коллекторного 9,5 виткового двигателя.
- Отлично сочетание огромной мощности и необычайной эффективности.
- Такой же размер, как у стандартного мотора 540-го типа.
- Необслуживаемая конструкция.
- Внешние контакты для
легкой перепайки проводов.
- Крупногабаритные шарикоподшипники.
- Высокий крутящий момент, термостойкий неодимовый ротор.
- Специальная конструкция статора обеспечивает плавное линейное увеличение крутящего момента.
- Простой и удобный монтаж через 4 точки.
- Ресурс в разы больше, чем в сопоставимых коллекторных моторах.
- Легко заменяемые подшипники и ротор.
- Совместим с любым бездатчиковым регулятором скорости для бесколлекторных двигателей.
Электронный регулятор скорости — «мозг» системы Flux. Регулятор скорости серии Fluxимеет разъемы для подключения мотора, разъем типа Dean для подключения и трехжильный кабель с разъемом для соединения с приемником, так что вы сможете легко установить регулятор в любом удобном месте на вашей модели. Регулятор способен работать с бесколлекторными двигателями разных размеров и мощности, а так же совместим как с NiMH аккумуляторами, так и LiPo батареями, что позволяет получить максимальную мощность от вашей системы Flux Brushless System! Регулятор Flux — небольшой по размеру, но огромный по допустимой мощности! На сайте HPI вы можете получить рекомендации по программированию регулятора скорости с помощью компьютера!
Особенности регулятора скорости Flux:
- Программируемый электронный регулятор скорости с функцией
заднего хода для бесколлекторных / коллекторных
электродвигателей.
- Отсечка при низком напряжении для LiPo аккумуляторов**
- Эффективный алюминиевый радиатор.
- Пропорциональный тормоз с контролем усилия.
- Огромная рабочая мощность (70A * непрерывно / 380A в пике).
- Плавный старт бездатчиковых двигателей (патенты находятся на рассмотрении)
- Dean’s разъем для подключения батареи.
- Надежный выключатель.
- Просто программируется.
- Возможность легко настроить параметры с помощью кабеля HPI link (в комплект не входит).
- Работает с бесколлекторными и стандартными коллекторными двигателями.
Система Flux Brushless
System, разработанная HPI,
предназначена для любителей и
спортсменов, которые хотят иметь мощную,
универсальную и доступную бесколлекторную
систему. Двигатели Flux
чрезвычайно мощные, очень надежные и
эффективные, а это самой легкий путь к победе!
У бездатчиковых двигателей HPI гораздо меньше
проводов, которые можно повредить во время гонки, и это избавляет
вас от лишних забот.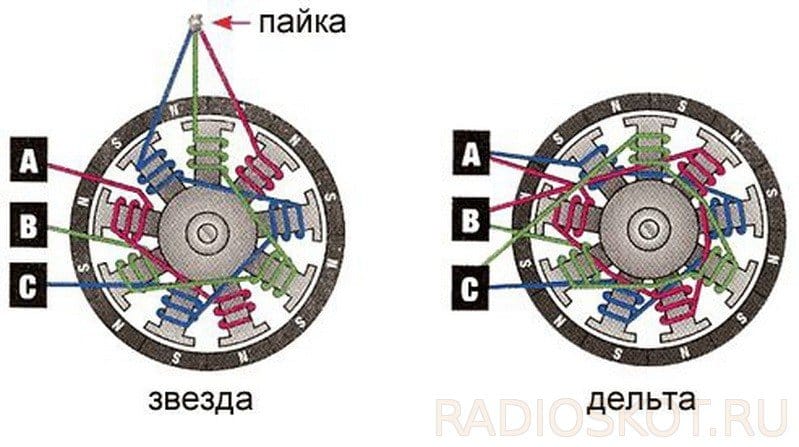 Вы можете приобрести
двигатель в комплекте с регулятором скорости или
купить их по отдельности!
Вы можете приобрести
двигатель в комплекте с регулятором скорости или
купить их по отдельности!
Перспективы модернизации
Владельцы Flux Motiv могут обновлять параметры регулятора с помощью компьютера и бесплатного программного обеспечения! Программисты постоянно делают обновления программного обеспечения Flux Motive и вы можете загружать их, используя набор HPI PC USB programming kit. Этот комплект позволяет подключить регулятор скорости прямо к компьютеру, работающему под Windows, и сохранить настройки профиля, внести изменения в настройки, обновить прошивку и многое другое!
Давайте сначала узнаем, как работает коллекторный двигатель.
Чтобы узнать, почему бесколлекторные двигатели настолько эффективны и имеют высокую мощность, необходимо знать, как работает стандартный коллекторный мотор.
Обычные коллекторные
электродвигатели, которые вы можете найти в
машинахSprint 2 или E-Firestorm имеют
всего два провода (положительный и
отрицательный), которыми двигатель подключается к регулятору
скорости. Внутри корпуса двигателя можно увидеть
два изогнутых постоянных магнита, а по центру
установлен вал с якорем, на котором намотаны обмотки
из медной проволоки. С одной стороны вала якоря
устанавливается моторная шестерня, с другой стороны вала расположен
так называемый коллектор из медных пластин, через который с помощью
угольных щеток ток подается к обмоткам якоря.
Внутри корпуса двигателя можно увидеть
два изогнутых постоянных магнита, а по центру
установлен вал с якорем, на котором намотаны обмотки
из медной проволоки. С одной стороны вала якоря
устанавливается моторная шестерня, с другой стороны вала расположен
так называемый коллектор из медных пластин, через который с помощью
угольных щеток ток подается к обмоткам якоря.
Две угольные щетки постоянно скользят по вращающемуся медному коллектору. Как вы можете видеть на рисунке выше, напряжение по проводам через щетки и коллектор поступает к обмоткам якоря, возникает электромагнитное поле, которое взаимодействует с постоянными магнитами статора и заставляет якорь вращаться.
Как начинает вращаться стандартный коллекторный
двигатель.
Когда на обмотки якоря поочередно поступает постоянный
электрический ток, в них возникает электромагнитное поле,
которое с одной стороны имеет «северный» а с другой
«южный» полюс. Поскольку «северный» полюс
любого магнита автоматически отталкиваются от
«северного» полюса другого магнита,
электромагнитное поле одной из обмоток якоря, взаимодействуя с
полюсами постоянных магнитов статора, заставляет якорь вращаться.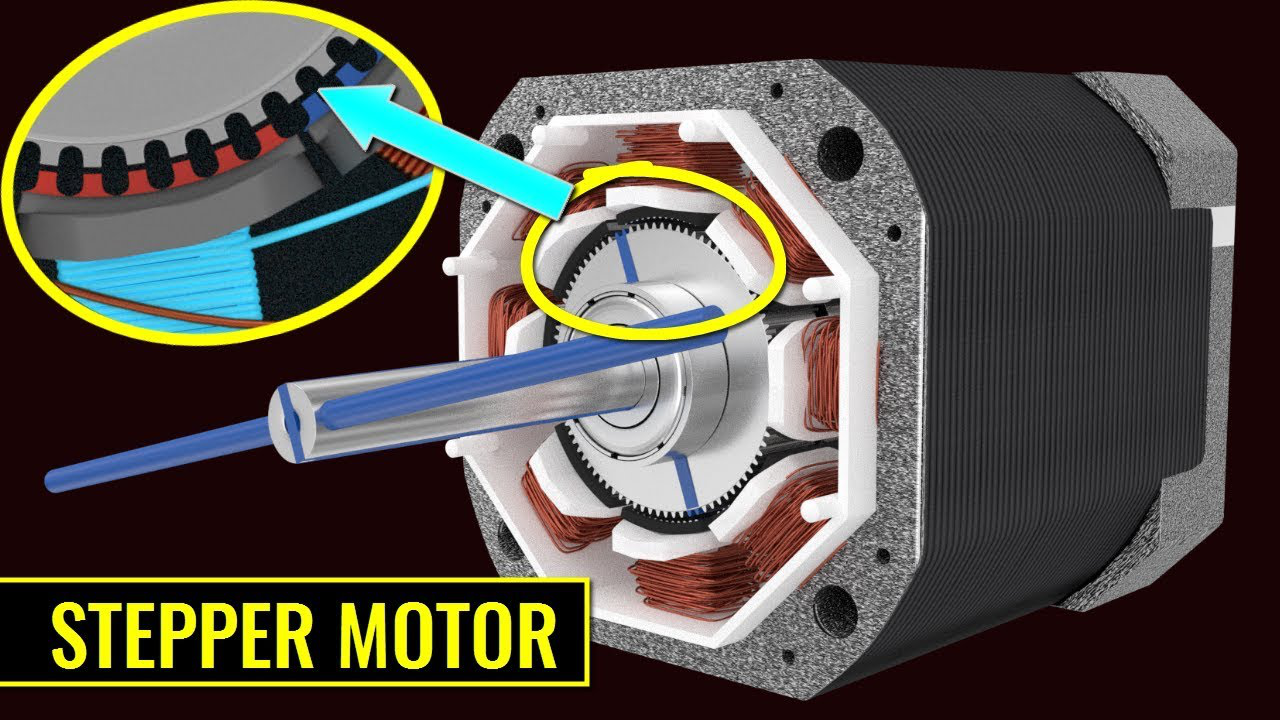 Через коллектор и щетки ток поступает на следующую обмотку якоря,
что заставляет якорь вместе с валом мотора продолжать вращение, и
так до тех пор, пока к мотору подается напряжение. Как
правило, якорь коллекторного мотора имеет три обмотки (три полюса)
— это не позволяет двигателю застревать в одном положении.
Через коллектор и щетки ток поступает на следующую обмотку якоря,
что заставляет якорь вместе с валом мотора продолжать вращение, и
так до тех пор, пока к мотору подается напряжение. Как
правило, якорь коллекторного мотора имеет три обмотки (три полюса)
— это не позволяет двигателю застревать в одном положении.
Недостатки стандартных коллекторных
двигателей
Недостатки коллекторных двигателей выявляются, когда
нужно получить огромное количество
оборотов от них. Поскольку
щетки должны постоянно находиться в контакте с
коллектором, в месте их соприкосновения возникает трение,
которое значительно увеличивается, особенно на высоких
оборотах. Любой дефект коллектора
приводит к значительному износу щеток и нарушению контакта, что в
свою очередь снижает эффективность мотора.
Именно поэтому серьезные гонщики
протачивают и полируют коллектор двигателя и меняют
щетки почти после каждого
заезда. Коллекторный узел стандартного
мотора так же является источником радиопомех и требует особого
внимания и обслуживания.
Теперь посмотрим, как работает бесколлекторный
двигатель.
Основной особенностью
конструкции бесколлекторного двигателя является то, что он по
принципу работы похож на коллекторный мотор, но все устроено как
бы «наизнанку», и в нем отсутствуют коллектор и щетки.
Постоянные магниты, которые в коллекторном моторе установлены на
неподвижном статоре, у бесколлекторного мотора расположены вокруг
вала, и этот узел называется ротор. Проволочные обмотки
бесколлекторного мотора размещены вокруг ротора и имеют несколько
различных магнитных полюсов. Датчиковые бесколлекторные моторы
имеют на роторе сенсор, который посылает сигналы о положении ротора
в процессор электронного регулятора скорости.
Почему бесколлекторный двигатель эффективней, чем
коллекторный мотор
Из-за отсутствия коллектора и щеток в бесколлекторном моторе нет
изнашивающихся деталей, кроме шарикоподшипников ротора, а это
автоматически делает его более эффективным и надежным. Наличие
сенсора контроля вращения ротора также значительно повышает
эффективность. У коллекторных двигателей не возникает искрения
щеток, что резко снижает возникновение помех, а отсутствие узлов с
повышенным трением благоприятно сказывается на температуре
работающего мотора, что так же повышает его эффективность.
Наличие
сенсора контроля вращения ротора также значительно повышает
эффективность. У коллекторных двигателей не возникает искрения
щеток, что резко снижает возникновение помех, а отсутствие узлов с
повышенным трением благоприятно сказывается на температуре
работающего мотора, что так же повышает его эффективность.
Существуют ли недостатки у бесколлекторных
двигателей?
Единственный возможный недостаток бесколлекторной системы –
это несколько более высокая стоимость, однако каждый, кто испытал
высокую мощность бесколлекторной системы, почувствовал прелесть
отсутствия необходимости периодической замены щеток, пружин,
коллекторов и якорей, тот быстро оценит общую экономию и не
вернется к коллекторным моторам … никогда!
Действительно ли бесколлекторный двигатель не требует
«никакого обслуживания?
Да! Они таковы, экономят время, поэтому гонщики всего мира теперь с
удовольствием могут передохнуть между заездами. Вам больше не
придется после каждой гонки демонтировать двигатель, разбирать его,
шлифовать коллектор, менять щетки, вновь собирать и заново
устанавливать . .. отсутствие этих забот — это огромное
удовольствие!
.. отсутствие этих забот — это огромное
удовольствие!
Единственное, что вам возможно потребуется делать, это содержать двигатель в чистоте, и при необходимости менять подшипники. Эти процедуры выполняются редко, так что их нельзя классифицировать как регулярное техническое обслуживание.
Почему без датчика?
Помимо базовых размеров и различных параметров, бесколлекторные
двигатели могут подразделяться по типу: с датчиком и без датчика.
Двигатель с датчиком используют очень маленький сенсор на роторе и
кроме трех толстых кабелей, по которому мотор получает питание,
имеют дополнительный шлейф из тонких проводов, которые соединяют
двигатель с регулятором скорости. Дополнительные провода передают
информацию с датчика о положении ротора сотни раз в секунду. Эта
информация обрабатывается электронным регулятором скорости, что
позволяет мотору работать плавно и эффективно, насколько это
возможно. Такие моторы используют профессиональные гонщики, однако
такие двигатели намного дороже и сложнее в использовании.
Бездатчиковая бесколлекторная система, как можно догадаться, не имеет датчиков и дополнительных проводов, а ротор таких двигателей вращается без точной регистрации его положения и оборотов регулятором скорости. Это позволяет сделать двигатель и регулятор скорости проще в изготовлении, проще в установке и в целом дешевле. Бездатчиковые системы способны обеспечить такую же мощность, как датчиковые, просто с чуть-чуть меньшей точностью, а это идеальное решение для любителей и начинающих спортсменов.
В HPI пришли к выводу, что нашим клиентам не нужна точность, которая доступна для датчиковых систем, для них важнее надежность, и мы решили использовать популярную бездатчиковую систему для комплектов серии Flux.
Мы надеемся, что данная статья объяснит все, что вам нужно знать о системе HPI Flux Brushless.
Коллекторный и бесколлекторный двигатели — Green-Battery
В ассортименте продукции Greenworks есть инструменты с коллекторным (щёточным) и бесколлекторным (бесщёточным) двигателями.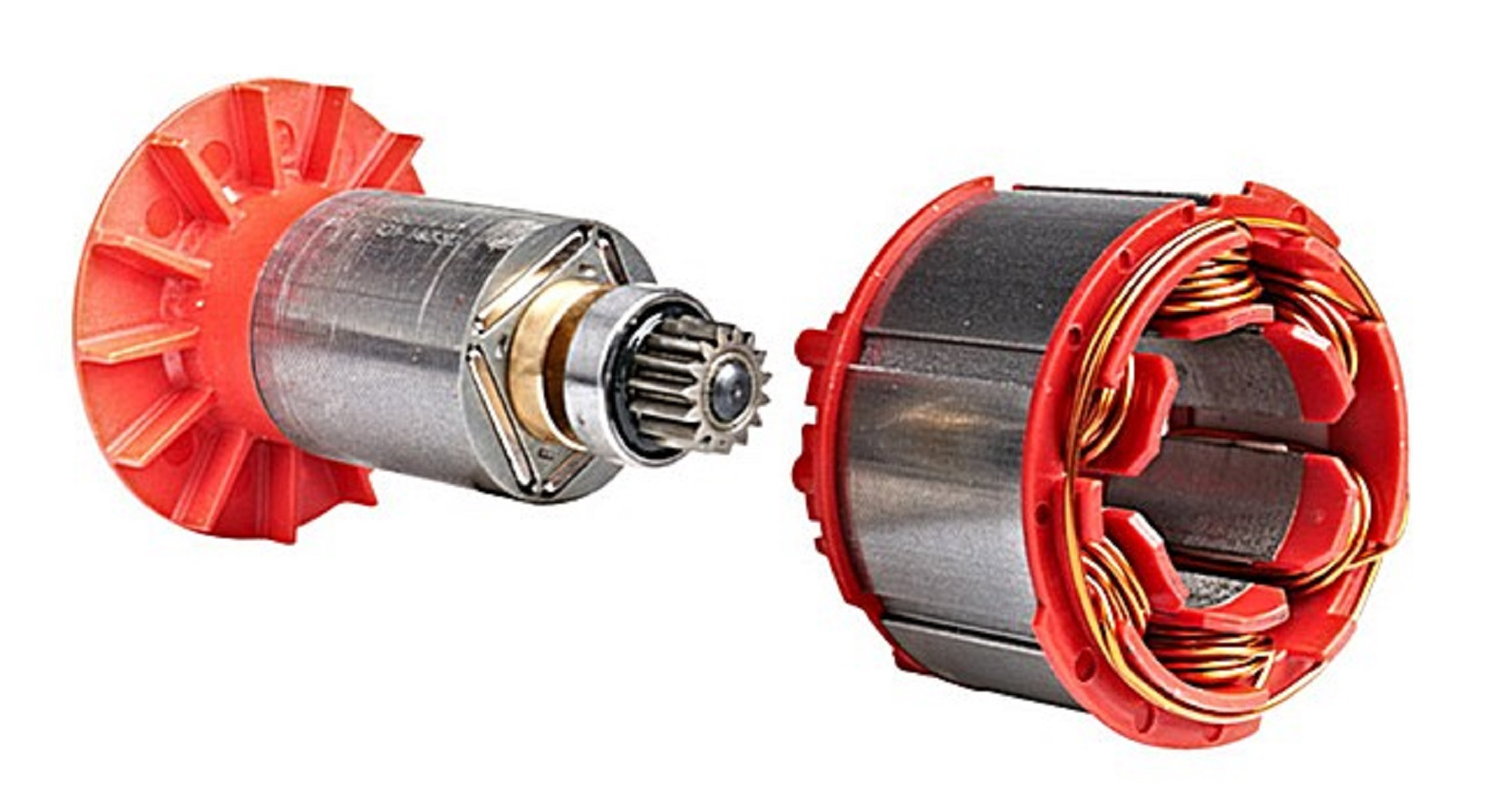 Но везде делается акцент только на бесколлекторном электродвигателе. Почему только на нём, и для чего тогда устройства с щёточным? Расскажем в данной статье преимущества и недостатки каждого электродвигателя и ответим на эти два вопроса.
Но везде делается акцент только на бесколлекторном электродвигателе. Почему только на нём, и для чего тогда устройства с щёточным? Расскажем в данной статье преимущества и недостатки каждого электродвигателя и ответим на эти два вопроса.
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
Устройство коллекторного двигателя
Якорь. Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор. Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники. Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки. Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор). Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.
Обмотки. Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора. Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора. Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.
Плюсы:
- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
Минусы:
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
- Задымление инструмента.
- Выход из строя инструмента раньше его «жизненного цикла».
Если рассматривать бытовую сферу применения, то коллекторный двигатель является традиционным и бюджетным вариантом эксплуатации (и самым часто используемым).
Инструменты на данном типе двигателя преданно и верно справятся с любой повседневной задачей в пределах своих возможностей. Так как такие инструменты по стоимости значительно дешевле инструментов на бесколлекторном двигателе, их рассматривает категория потребителей, которая придерживается мнения: «ничто не вечно».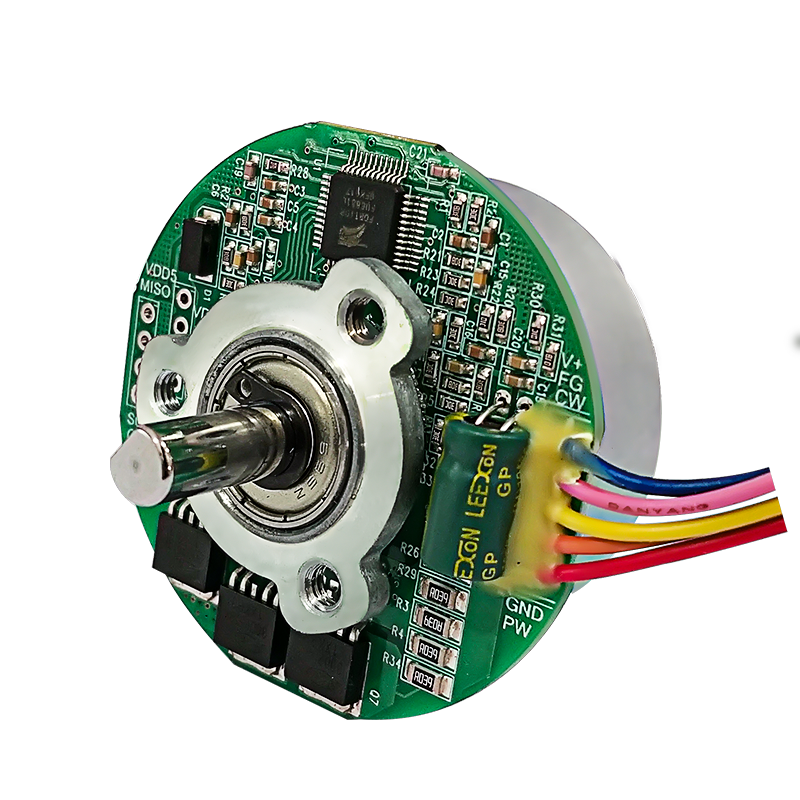 Зачем переплачивать, если любой агрегат может выйти из строя? Мы же считаем, что при надлежащих условиях эксплуатации любой инструмент может прослужить верой и правдой довольно долгий срок. Но выбор за Вами.
Зачем переплачивать, если любой агрегат может выйти из строя? Мы же считаем, что при надлежащих условиях эксплуатации любой инструмент может прослужить верой и правдой довольно долгий срок. Но выбор за Вами.
Бесколлекторный двигатель
Если в коллекторном двигателе всё приходит в действие за счёт механики, то в бесщёточном — чистая электроника. Также позиции некоторых элементов в конструкции меняются местами. В коллекторном двигателе обмотки находились на роторе, а постоянные магниты — на статоре. У бесколлеторного — постоянные магниты переносятся на ротор, а катушки с обмоткой располагаются на статоре. Также ротор и статор могут менять свои позиции: есть модели двигателей с внешним ротором. Здесь отсутствуют щётки и коллектор, вместо них добавлен микропроцессор (контроллер) и кулер для охлаждения системы. Микропроцессор контролирует положение ротора, скорость вращения, равномерное распределение напряжения по катушкам обмотки.
Основные типы бесщёточного двигателя :
- Асинхронный — это двигатель, который преобразовывает электроэнергию переменного тока в механическую.
 Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks).
Название происходит от разной скорости вращения магнитного поля и ротора. Частота вращения ротора меньше, чем у магнитного поля, создаваемого обмотками статора (Например, двигатель DigiPro, который используется в продукции Greenworks). - Синхронный — это двигатель переменного тока, у которого частота вращений ротора равна частоте вращений магнитного поля.
Тип двигателя с внешним ротором
Расположение ротора и статора в бесщёточном двигателе DigiPro
Плюсы:
- Из-за отсутствия щёток меньше трения.
- Меньше подвержены износу.
- Отсутствие искр и возможного возгорания.
- Упрощенная регулировка крутящего момента в больших пределах.
- Экономия расходуемой энергии.
- У инструментов с реверсом одинаковая мощность в обоих направлениях вращения.
-
Быстрый запуск с больших скоростей.
- Могут разгоняться до предельных показателей.
- Некоторые модели при сильной нагрузке оснащены системой защиты двигателя.
Минусы:
- Значительно дороже в цене, чем коллекторные двигатели.
- Техническое обслуживание более узкоспециализированное.
Несомненно бесколлекторные двигатели ориентированы на профессиональные работы с приличной нагрузкой. Несмотря на высокие показатели усовершенствованного типа двигателя, его единственный недостаток бьёт по кошельку. И перед тем, как приобретать инструмент на том или ином двигателе, прежде всего надо поставить перед собой вопрос: для каких целей он нужен. Уже исходя из ответа делать свой выбор.
Сколько людей — столько и мнений. Компания Greenworks старается делать качественную продукцию на разных типах двигателя, чтобы каждый мог подобрать себе инструмент по предпочтениям, функционалу и необходимой мощности под конкретные задачи, которые у каждого клиента свои. Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Именно поэтому, например, в разделе «Ручной инструмент» Вы можете наблюдать один тип агрегата на коллекторном и бесколлекторном двигателях. Какой лучше? Выбор за Вами!
Всегда интересные новости и статьи от команды сайта Green-Battery.ru
Копирование текстов возможно только со ссылкой на первоисточник.
Подробное описание принципа работы и применения бесщеточного двигателя постоянного тока
Здравствуйте, в этом руководстве мы узнаем о бесщеточных двигателях, также известных как бесщеточные двигатели постоянного тока или BLDC Motors. Мы увидим работу и применение бесщеточного двигателя постоянного тока.
Что такое бесщеточный двигатель постоянного тока?
Бесщеточные электродвигатели постоянного тока, также известные как электродвигатели с электронной коммутацией (ЕСМ, ЕС-двигатели).
Первичный КПД — самая важная особенность двигателей BLDC. Потому что ротор является единственным носителем магнитов и не требует энергии. то есть без соединений, без коммутатора и без щеток. Вместо них в двигателе используется схема управления. Чтобы определить, где находится ротор в определенное время, двигатели BLDC используют вместе с контроллерами поворотные энкодеры или датчик Холла.
то есть без соединений, без коммутатора и без щеток. Вместо них в двигателе используется схема управления. Чтобы определить, где находится ротор в определенное время, двигатели BLDC используют вместе с контроллерами поворотные энкодеры или датчик Холла.
Конструкция бесщеточного двигателя постоянного тока
В этом двигателе постоянные магниты прикреплены к ротору. Токоведущие проводники или обмотки якоря располагаются на статоре. Они используют электрическую коммутацию для преобразования электрической энергии в механическую.
Основное конструктивное различие между щеточными и бесщеточными двигателями заключается в замене механического коммутатора схемой электрического переключателя. Двигатель BLDC — это тип синхронного двигателя в том смысле, что магнитное поле, создаваемое статором и ротором, вращается с одинаковой частотой.
Бесщеточный двигатель не имеет токоведущих коммутаторов. Поле внутри бесщеточного двигателя переключается через усилитель, который запускается коммутирующим устройством, таким как оптический энкодер.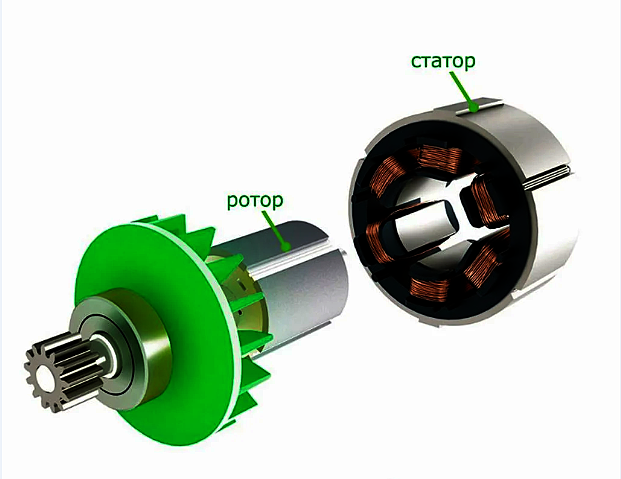
Компоновка бесщеточного двигателя постоянного тока может варьироваться в зависимости от того, какой он в стиле «Out runner» или «Inrunner».
Outrunner — Полевой магнит представляет собой барабанный ротор, который вращается вокруг статора. Этот стиль предпочтителен для приложений, где требуется высокий крутящий момент и где высокие обороты не требуются.
В направляющей — Статор представляет собой неподвижный барабан, в котором вращается полевой магнит. Этот двигатель известен тем, что вырабатывает меньший крутящий момент, чем двигатель внешнего вида, но способен вращаться на очень высоких оборотах.
ДОЛЖНЫ ПРОЧИТАТЬ СТАТЬИ В БЛОГЕ НА ДВИГАТЕЛЯХ ПОСТОЯННОГО ТОКА
Принцип работы бесщеточного двигателя постоянного тока
Электродвигатель BLDC работает по принципу, аналогичному принципу работы электродвигателя постоянного тока Brushed DC . Закон силы Лоренца, который гласит, что всякий раз, когда проводник с током помещается в магнитное поле, он испытывает силу. В результате силы реакции на магнит будет действовать равная и противоположная сила. В двигателе BLDC токопроводящий проводник неподвижен, а постоянный магнит движется.
Закон силы Лоренца, который гласит, что всякий раз, когда проводник с током помещается в магнитное поле, он испытывает силу. В результате силы реакции на магнит будет действовать равная и противоположная сила. В двигателе BLDC токопроводящий проводник неподвижен, а постоянный магнит движется.
Когда катушки статора получают питание от источника, он становится электромагнитом и начинает создавать однородное поле в воздушном зазоре. Хотя источником питания является постоянный ток, при переключении генерируется сигнал переменного напряжения трапециевидной формы. Благодаря силе взаимодействия между статором электромагнита и ротором с постоянными магнитами, ротор продолжает вращаться.
С переключением обмоток на сигналы высокого и низкого уровня, соответствующие обмотки находятся под напряжением как северный и южный полюса.Ротор с постоянным магнитом с северным и южным полюсами совмещен с полюсами статора, что заставляет двигатель вращаться.
Преимущества бесщеточного двигателя постоянного тока
- Меньше общего обслуживания из-за отсутствия щеток
- Уменьшенный размер с намного лучшими тепловыми характеристиками
- Более высокий диапазон скоростей и меньшее генерирование электрического шума.

- Не имеет механического коммутатора и связанных с этим проблем
- Высокий КПД и высокое соотношение выходной мощности к размеру за счет использования ротора с постоянными магнитами
- Высокая скорость работы даже в нагруженном и ненагруженном состоянии за счет отсутствия щеток, ограничивающих скорость
- Двигатель с меньшей геометрией и меньший вес, чем двигатели постоянного тока щеточного типа и асинхронные двигатели переменного тока.
- Длительный срок службы, поскольку для системы коллектора не требуется осмотр и техническое обслуживание
- Более высокая динамическая характеристика за счет низкой инерции и несущей обмотки статора
- Меньше электромагнитных помех
- Низкий уровень шума за счет отсутствия щеток
Ограничения бесщеточного двигателя постоянного тока
- Эти моторы дорогие
- Требуется электронный контроллер управления этим мотором дорого
- Требуется сложная схема привода
- Необходимость дополнительных датчиков
Применение бесщеточного двигателя постоянного тока
Бесщеточные двигатели постоянного тока (BLDC) используются для широкого спектра требований приложений, таких как переменные нагрузки, постоянные нагрузки и приложения для позиционирования в областях промышленного управления, автомобилестроения, авиации, систем автоматизации, медицинского оборудования и т.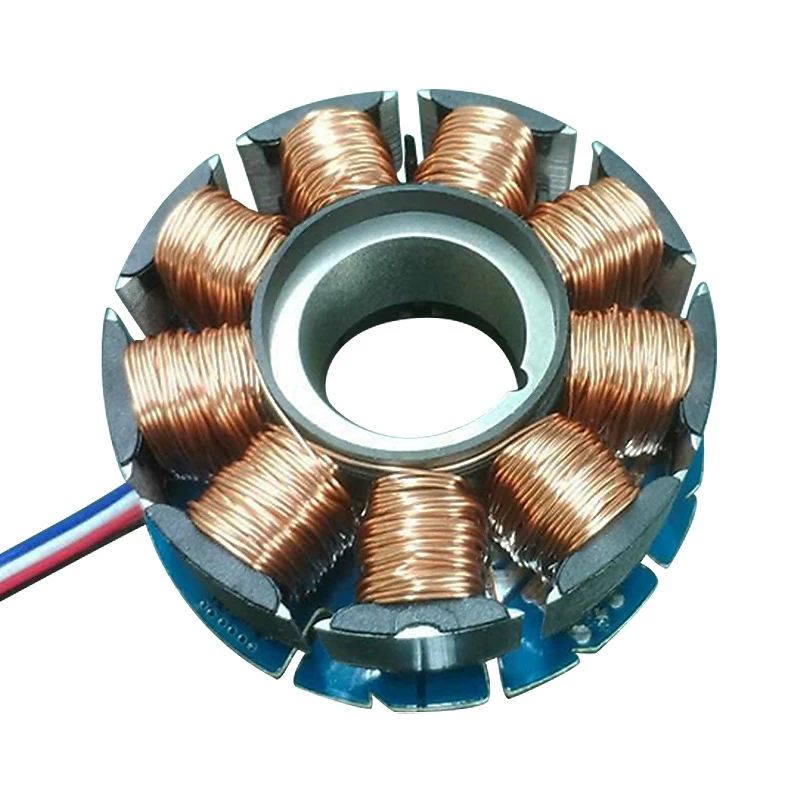 Д.
Д.
- Компьютерные жесткие диски и DVD / CD-плееры
- Электромобили, гибридные автомобили и электровелосипеды
- Промышленные роботы, станки с ЧПУ и простые системы с ременным приводом
- Стиральные машины, компрессоры и сушилки
- Вентиляторы, насосы и нагнетатели.
Надеюсь, эта статья поможет вам понять принцип работы и применение бесщеточного двигателя постоянного тока. Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
Знакомство с бесщеточными двигателями постоянного тока
Бесщеточные двигатели постоянного тока широко используются в промышленности по всему миру. На самом базовом уровне существуют щеточные и бесщеточные двигатели, а также двигатели постоянного и переменного тока. Бесщеточные двигатели постоянного тока, как вы понимаете, не содержат щеток и используют постоянный ток.
Эти двигатели обладают многими конкретными преимуществами по сравнению с другими типами электродвигателей, но, выходя за рамки основ, что именно представляет собой бесщеточный двигатель постоянного тока? Как это работает и для чего используется?
Как работает бесщеточный двигатель постоянного тока
Часто помогает сначала объяснить, как работает щеточный двигатель постоянного тока, поскольку он использовался некоторое время до того, как стали доступны бесщеточные двигатели постоянного тока. Почищенный щеткой двигатель постоянного тока имеет постоянные магниты снаружи своей конструкции и вращающийся якорь внутри. Постоянные магниты, которые неподвижны снаружи, называются статором. Якорь, который вращается и содержит электромагнит, называется ротором.
Почищенный щеткой двигатель постоянного тока имеет постоянные магниты снаружи своей конструкции и вращающийся якорь внутри. Постоянные магниты, которые неподвижны снаружи, называются статором. Якорь, который вращается и содержит электромагнит, называется ротором.
В щеточном двигателе постоянного тока ротор вращается на 180 градусов, когда электрический ток проходит через якорь. Чтобы продолжить, полюса электромагнита должны перевернуться. Щетки, когда ротор вращается, контактируют со статором, меняя магнитное поле и позволяя ротору вращаться на полные 360 градусов.
Бесщеточный двигатель постоянного тока по существу перевернут наизнанку, что устраняет необходимость в щетках для изменения электромагнитного поля. В бесщеточных двигателях постоянного тока постоянные магниты находятся на роторе, а электромагниты — на статоре. Затем компьютер заряжает электромагниты в статоре, чтобы вращать ротор на полные 360 градусов.
Для чего используются бесщеточные двигатели постоянного тока?
Бесщеточные двигатели постоянного тока обычно имеют КПД 85-90%, в то время как щеточные двигатели обычно имеют КПД только 75-80%.Щетки со временем изнашиваются, иногда вызывая опасное искрение, ограничивая срок службы двигателя с щеткой. Бесщеточные двигатели постоянного тока тихие, легкие и имеют гораздо более длительный срок службы. Поскольку компьютеры управляют электрическим током, бесщеточные двигатели постоянного тока могут обеспечить гораздо более точное управление движением.
Благодаря всем этим преимуществам, бесщеточные двигатели постоянного тока часто используются в современных устройствах, где требуется низкий уровень шума и мало тепла, особенно в устройствах, которые работают в непрерывном режиме. Это могут быть стиральные машины, кондиционеры и другая бытовая электроника.Они могут даже быть основным источником энергии для сервисных роботов, что потребует очень тщательного контроля силы из соображений безопасности.
обладают рядом явных преимуществ по сравнению с другими типами электродвигателей, поэтому они нашли применение во многих предметах домашнего обихода и могут стать основным фактором роста сервисных роботов внутри и за пределами промышленного сектора.
Если вы считаете, что ваше приложение может извлечь выгоду из этой технологии, просмотрите список поставщиков и интеграторов бесщеточных двигателей постоянного тока.
Основы бесщеточных двигателей постоянного тока (BLDC Motors)
В этом руководстве мы узнаем о бесщеточных двигателях, также известных как бесщеточные двигатели постоянного тока или двигатели BLDC. Мы увидим, что такое двигатель BLDC, его принцип работы, как правильно управлять бесщеточным двигателем постоянного тока, а также несколько приложений.
Введение
Бесщеточные двигатели постоянного тока или двигатели BLDC стали значительным вкладчиком в современные приводные технологии. Их быстрое завоевание популярности привело к расширению диапазона приложений в областях бытовой техники, автомобильной промышленности, промышленной автоматизации, химической и медицинской промышленности, авиакосмической промышленности и приборостроения.
Их быстрое завоевание популярности привело к расширению диапазона приложений в областях бытовой техники, автомобильной промышленности, промышленной автоматизации, химической и медицинской промышленности, авиакосмической промышленности и приборостроения.
Несмотря на то, что они долгое время использовались для приводов и выработки электроэнергии, субкиловаттный диапазон, в котором доминировали щеточные двигатели постоянного тока, всегда был серой зоной. Но современная силовая электроника и микропроцессорные технологии позволили маленьким бесщеточным двигателям постоянного тока процветать как с точки зрения цены, так и с точки зрения производительности.
Что такое двигатель BLDC?
Бесщеточный двигатель постоянного тока похож на щеточный двигатель постоянного тока, но, как следует из названия, в BLDC не используются щетки для коммутации, а они коммутируются электронно.В обычных щеточных двигателях постоянного тока щетки используются для передачи мощности на ротор, когда они вращаются в фиксированном магнитном поле.
Как упоминалось ранее, в двигателе BLDC используется электронная коммутация, что исключает механическое повреждение щеток.
Конструкция двигателя BLDC
Основным конструктивным различием между щеточными и бесщеточными двигателями является замена механического коммутатора схемой электрического переключателя. Имея это в виду, двигатель BLDC представляет собой тип синхронного двигателя в том смысле, что магнитное поле, создаваемое статором и ротором, вращается с одинаковой частотой.
Бесщеточные двигатели доступны в трех конфигурациях: однофазные, двухфазные и трехфазные. Из них наиболее распространенным является трехфазный BLDC.
На следующем изображении показано поперечное сечение двигателя BLDC.
Как вы можете видеть на изображении, двигатель BLDC состоит из двух основных частей: статора и ротора.
Статор
Структура статора двигателя BLDC аналогична конструкции асинхронного двигателя. Он состоит из уложенных друг на друга стальных пластин с продольными прорезями для намотки. Обмотка в BLDC немного отличается от обмотки традиционного асинхронного двигателя.
Обмотка в BLDC немного отличается от обмотки традиционного асинхронного двигателя.
Как правило, большинство двигателей BLDC состоит из трех обмоток статора, соединенных звездой или «Y» (без нейтральной точки). Кроме того, на основе соединений катушек обмотки статора делятся на трапецеидальные и синусоидальные двигатели.
В трапециевидном двигателе и ток возбуждения, и обратная ЭДС имеют форму трапеции (синусоидальная форма в случае синусоидальных двигателей).Обычно двигатели с номинальным напряжением 48 В (или меньше) используются в автомобилестроении и робототехнике (гибридные автомобили и роботизированные манипуляторы).
Ротор
Роторная часть двигателя BLDC состоит из постоянных магнитов (обычно магнитов из редкоземельных сплавов, таких как неодим (Nd), самарий-кобальт (SmCo) и сплава неодима, феррита и бора (NdFeB)).
В зависимости от приложения количество полюсов может варьироваться от двух до восьми с попеременным размещением северных (северных) и южных (южных) полюсов. На следующем изображении показаны три различных варианта расположения полюсов.В первом случае магниты размещены на внешней периферии ротора.
На следующем изображении показаны три различных варианта расположения полюсов.В первом случае магниты размещены на внешней периферии ротора.
Вторая конфигурация называется ротором со встроенным магнитом, где прямоугольные постоянные магниты встроены в сердечник ротора. В третьем случае магниты вставляются в железный сердечник ротора.
Датчики положения (датчики Холла)
Поскольку в двигателе BLDC нет щеток, коммутация управляется электроникой. Чтобы вращать двигатель, обмотки статора должны быть запитаны в определенной последовательности, а положение ротора (т.е.е. необходимо знать северный и южный полюса ротора, чтобы точно запитать конкретный набор обмоток статора.
Датчик положения, который обычно представляет собой датчик Холла (работающий по принципу эффекта Холла), обычно используется для определения положения ротора и преобразования его в электрический сигнал. В большинстве двигателей BLDC используются три датчика Холла, которые встроены в статор для определения положения ротора.
Выходной сигнал датчика Холла будет ВЫСОКИМ или НИЗКИМ, в зависимости от того, проходит ли рядом с ним северный или южный полюс ротора.Объединив результаты трех датчиков, можно определить точную последовательность включения.
Прочтите о КАК ИСПОЛЬЗОВАТЬ ДАТЧИК ЭФФЕКТИВНОСТИ ЗАЛ С ARDUINO?
Принцип работы
Рассмотрим следующую установку трех обмоток статора, обозначенных A, B и C. Для понимания, давайте заменим ротор одним магнитом.
Мы знаем, что когда через катушку подается ток, создается магнитное поле и ориентация силовых линий i.е. полюса генерируемого магнита будут зависеть от направления тока, протекающего через катушку.
Используя этот принцип, если мы подаем ток на катушку A, чтобы она генерировала магнитное поле и притягивала магнит ротора. Положение магнита ротора немного сместится по часовой стрелке и выровняется с A.
Если теперь пропустить ток через катушки B и C одну за другой (в таком порядке), магнит ротора будет вращаться по часовой стрелке.
Чтобы повысить эффективность, мы можем намотать противоположные катушки, используя одну катушку, чтобы получить двойное притяжение.Еще больше увеличивая эффективность, мы можем возбуждать две катушки одновременно, так что одна катушка будет притягивать магнит, а другая — отталкивать. В это время третий будет бездействовать.
Для полного вращения магнита ротора на 360 0 применимы шесть возможных комбинаций катушек A, B и C, которые показаны на следующей временной диаграмме.
Основываясь на приведенной выше диаграмме, мы можем подтвердить, что в любое время одна фаза является положительной, одна фаза отрицательной, а третья фаза неактивна (или плавающая).Итак, на основе входных сигналов от датчиков Холла у нас есть два переключения фаз, как показано на диаграмме выше.
Приводные бесщеточные двигатели постоянного тока
Если статор и ротор являются неотъемлемыми частями двигателя постоянного тока с BLDC, которые являются его неотъемлемой частью, то электроника привода не менее важна. Блок-схема типичной системы управления или привода бесщеточного двигателя постоянного тока показана на следующем изображении.
Блок-схема типичной системы управления или привода бесщеточного двигателя постоянного тока показана на следующем изображении.
Эта схема привода часто известна как система электронного регулятора скорости или просто ESC.Одна из распространенных схем называется полной мостовой схемой управления. Он состоит из микроконтроллера с выходами ШИМ, шести полевых МОП-транзисторов для трех фаз обмоток статора, обратной связи от датчиков Холла и некоторых компонентов, связанных с источником питания.
MCU можно запрограммировать на соответствующее переключение полевых МОП-транзисторов на основе данных от датчиков Холла.
Преимущества двигателей BLDC
Поскольку двигатели BLDC имеют электронную коммутацию, есть несколько преимуществ по сравнению с традиционными щеточными двигателями постоянного тока.Вот некоторые из них:
- Отсутствие износа (из-за отсутствия щеток)
- Высокая эффективность
- Лучшая скорость и крутящий момент
- Длительный срок службы
- Меньше шума или бесшумная работа
- Значительно более высокая частота вращения
Области применения Бесщеточных двигателей постоянного тока
Некоторые из областей применения двигателей BLDC указаны ниже:
- Односкоростные приложения
- Регулируемые скорости
- Управление положением
- Низкошумные приложения
- Высокоскоростные приложения
Что такое бесщеточный Двигатели постоянного тока
Понимание принципа и применения высокоэффективных двигателей: 1 из 3
Двигатель преобразует подаваемую электрическую энергию в механическую. Обычно используются различные типы двигателей. Среди них бесщеточные двигатели постоянного тока (BLDC) отличаются высоким КПД и отличной управляемостью и широко используются во многих приложениях. Двигатель BLDC имеет преимущества в энергосбережении по сравнению с двигателями других типов.
Обычно используются различные типы двигателей. Среди них бесщеточные двигатели постоянного тока (BLDC) отличаются высоким КПД и отличной управляемостью и широко используются во многих приложениях. Двигатель BLDC имеет преимущества в энергосбережении по сравнению с двигателями других типов.
Двигатели силовые агрегаты
Когда инженеры сталкиваются с проблемой проектирования электрического оборудования для выполнения механических задач, они могут подумать о том, как электрические сигналы преобразуются в энергию.Таким образом, исполнительные механизмы и двигатели относятся к устройствам, преобразующим электрические сигналы в движение. Двигатели обменивают электрическую энергию на механическую.
Самый простой тип двигателя — щеточный двигатель постоянного тока. В этом типе двигателя электрический ток проходит через катушки, которые расположены в фиксированном магнитном поле. Ток создает магнитные поля в катушках; это заставляет узел катушки вращаться, поскольку каждая катушка отталкивается от аналогичного полюса и тянется к противоположному полюсу фиксированного поля. Чтобы поддерживать вращение, необходимо постоянно реверсировать ток — так, чтобы полярность катушки постоянно менялась, заставляя катушки продолжать «преследовать» разные фиксированные полюса. Питание катушек подается через неподвижные токопроводящие щетки, которые контактируют с вращающимся коммутатором; именно вращение коммутатора вызывает изменение направления тока в катушках. Коммутатор и щетки являются ключевыми компонентами, отличающими щеточный двигатель постоянного тока от других типов двигателей. На рисунке 1 показан общий принцип работы щеточного двигателя.
Чтобы поддерживать вращение, необходимо постоянно реверсировать ток — так, чтобы полярность катушки постоянно менялась, заставляя катушки продолжать «преследовать» разные фиксированные полюса. Питание катушек подается через неподвижные токопроводящие щетки, которые контактируют с вращающимся коммутатором; именно вращение коммутатора вызывает изменение направления тока в катушках. Коммутатор и щетки являются ключевыми компонентами, отличающими щеточный двигатель постоянного тока от других типов двигателей. На рисунке 1 показан общий принцип работы щеточного двигателя.
Рисунок 1: Работа щеточного двигателя постоянного тока.
Неподвижные щетки подают электроэнергию на вращающийся коммутатор. Когда коммутатор вращается, он постоянно меняет направление тока в катушках, меняя полярность катушек, так что катушки поддерживают правое вращение. Коммутатор вращается, потому что он прикреплен к ротору, на котором установлены катушки.
Общие типы двигателей
Двигатели различаются по типу мощности (переменного или постоянного тока) и способу создания вращения (Рисунок 2). Ниже мы кратко рассмотрим особенности и способы использования каждого типа.
Ниже мы кратко рассмотрим особенности и способы использования каждого типа.
Рисунок 2: Различные типы двигателей
Электродвигатели постоянного токас щеткой, отличающиеся простой конструкцией и легким управлением, широко используются для открывания и закрывания лотков для дисков. В автомобилях они часто используются для втягивания, выдвижения и установки боковых окон с электроприводом. Низкая стоимость этих двигателей делает их пригодными для множества применений. Однако одним из недостатков является то, что щетки и коммутаторы имеют тенденцию к относительно быстрому износу в результате их постоянного контакта, что требует частой замены и периодического обслуживания.
Шаговый двигатель приводится в действие импульсами; он поворачивается на определенный угол (шаг) с каждым импульсом. Поскольку вращение точно контролируется количеством полученных импульсов, эти двигатели широко используются для выполнения позиционных регулировок. Они часто используются, например, для управления подачей бумаги в факсимильных аппаратах и принтерах, поскольку эти устройства подают бумагу с фиксированными шагами, которые легко коррелируют с количеством импульсов. Паузу также можно легко контролировать, поскольку вращение двигателя мгновенно прекращается при прерывании импульсного сигнала.
Паузу также можно легко контролировать, поскольку вращение двигателя мгновенно прекращается при прерывании импульсного сигнала.
В синхронных двигателях вращение синхронно с частотой питающего тока. Эти двигатели часто используются для привода вращающихся противней в микроволновых печах; редукторы в моторном блоке можно использовать для получения подходящей скорости вращения для нагрева пищи. Скорость вращения асинхронных двигателей также зависит от частоты; но движение не синхронное. В прошлом эти двигатели часто использовались в электрических вентиляторах и стиральных машинах.
Обычно используются различные типы двигателей.На этом занятии мы рассмотрим преимущества и применение бесщеточных двигателей постоянного тока.
Почему двигатели BLDC вращаются?
Как следует из названия, в бесщеточных двигателях постоянного тока щетки не используются. В щеточных двигателях щетки подают ток через коммутатор в катушки на роторе. Так как же бесщеточный двигатель передает ток на катушки ротора? Это не так — потому что катушки не расположены на роторе. Вместо этого ротор представляет собой постоянный магнит; Катушки не вращаются, а вместо этого фиксируются на статоре.Поскольку катушки не двигаются, нет необходимости в щетках и коммутаторе. (См. Рисунок 3.)
Вместо этого ротор представляет собой постоянный магнит; Катушки не вращаются, а вместо этого фиксируются на статоре.Поскольку катушки не двигаются, нет необходимости в щетках и коммутаторе. (См. Рисунок 3.)
В щеточном двигателе вращение достигается за счет управления магнитными полями, создаваемыми катушками на роторе, в то время как магнитное поле, создаваемое неподвижными магнитами, остается фиксированным. Чтобы изменить скорость вращения, вы меняете напряжение на катушках. В двигателе BLDC вращается постоянный магнит; вращение достигается за счет изменения направления магнитных полей, создаваемых окружающими неподвижными катушками.Чтобы контролировать вращение, вы регулируете величину и направление тока в этих катушках.
Рисунок 3: Двигатель BLDC.
Поскольку ротор представляет собой постоянный магнит, ему не нужен ток, что устраняет необходимость в щетках и коммутаторе. Ток в неподвижных катушках контролируется извне.
Преимущества двигателей BLDC
Двигатель BLDC с тремя катушками на статоре будет иметь шесть электрических проводов (по два на каждую катушку), отходящих от этих катушек. В большинстве вариантов реализации три из этих проводов будут соединены внутри, а три оставшихся провода отходят от корпуса двигателя (в отличие от двух проводов, отходящих от щеточного двигателя, описанного ранее). Электропроводка в корпусе двигателя BLDC более сложна, чем просто соединение положительной и отрицательной клемм силового элемента; мы более подробно рассмотрим, как работают эти двигатели, во второй части этой серии. В заключение мы рассмотрим преимущества двигателей BLDC.
Одним из больших преимуществ является эффективность, так как эти двигатели могут непрерывно управлять с максимальной силой вращения (крутящим моментом).Щеточные двигатели, напротив, достигают максимального крутящего момента только в определенных точках вращения. Для того, чтобы щеточный двигатель обеспечивал такой же крутящий момент, как и бесщеточная модель, необходимо использовать более крупные магниты. Вот почему даже небольшие двигатели BLDC могут обеспечивать значительную мощность.
Второе большое преимущество — связанное с первым — это управляемость.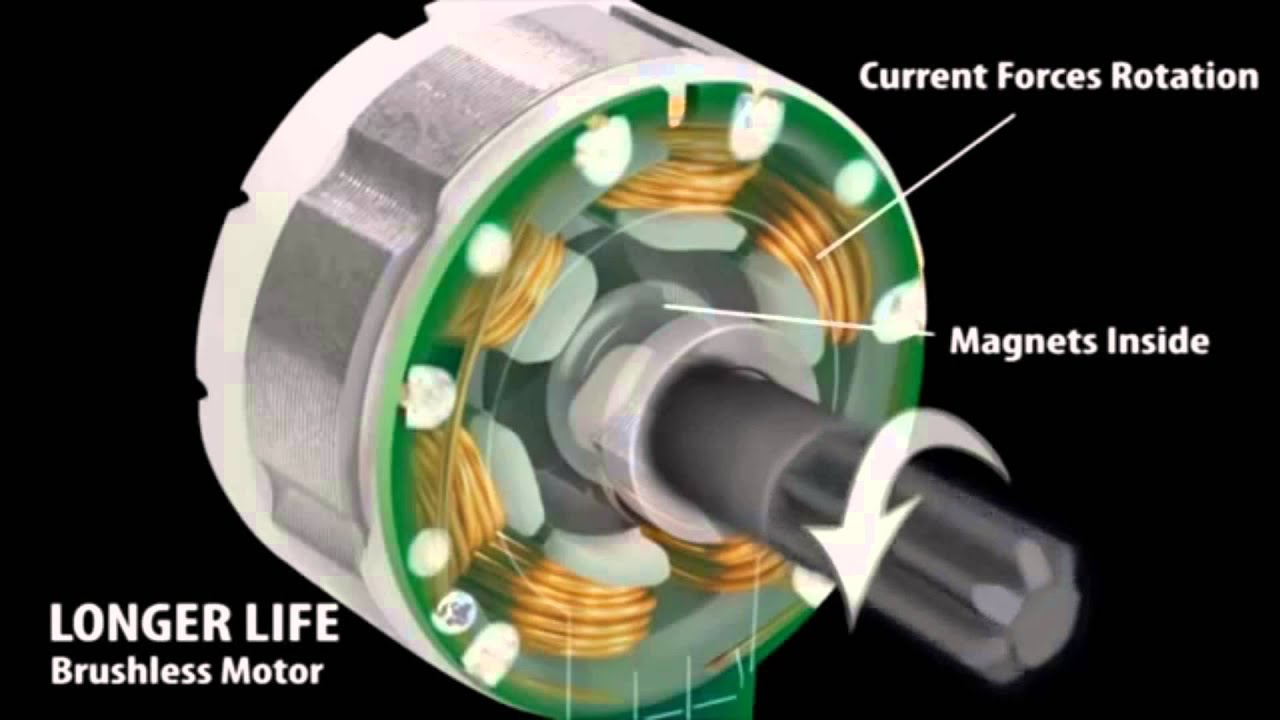 Двигателями BLDC можно управлять с помощью механизмов обратной связи, чтобы обеспечить точный требуемый крутящий момент и скорость вращения. Прецизионное управление, в свою очередь, снижает потребление энергии и тепловыделение, а в случаях, когда двигатели питаются от батареи, увеличивает срок ее службы.
Двигателями BLDC можно управлять с помощью механизмов обратной связи, чтобы обеспечить точный требуемый крутящий момент и скорость вращения. Прецизионное управление, в свою очередь, снижает потребление энергии и тепловыделение, а в случаях, когда двигатели питаются от батареи, увеличивает срок ее службы.
BLDC также отличаются высокой прочностью и низким уровнем электрического шума благодаря отсутствию щеток. В щеточных двигателях щетки и коллектор изнашиваются в результате постоянного движущегося контакта, а также образуют искры в местах контакта. Электрический шум, в частности, является результатом сильных искр, которые, как правило, возникают в областях, где щетки проходят через зазоры в коммутаторе. Вот почему двигатели BLDC часто считаются предпочтительными в приложениях, где важно избегать электрических шумов.
Идеальное применение для двигателей BLDC
Мы убедились, что двигатели BLDC обладают высокой эффективностью и управляемостью, а также имеют длительный срок службы. Так для чего они нужны? Благодаря своей эффективности и долговечности они широко используются в устройствах, которые работают непрерывно. Они давно используются в стиральных машинах, кондиционерах и другой бытовой электронике; а в последнее время они появляются в вентиляторах, где их высокая эффективность способствовала значительному снижению энергопотребления.
Так для чего они нужны? Благодаря своей эффективности и долговечности они широко используются в устройствах, которые работают непрерывно. Они давно используются в стиральных машинах, кондиционерах и другой бытовой электронике; а в последнее время они появляются в вентиляторах, где их высокая эффективность способствовала значительному снижению энергопотребления.
Они также используются для привода вакуумных машин. В одном случае изменение программы управления привело к значительному скачку скорости вращения — пример превосходной управляемости, обеспечиваемой этими двигателями.
ДвигателиBLDC также используются для вращения жестких дисков, где их надежность обеспечивает надежную работу приводов в течение длительного времени, а их энергоэффективность способствует снижению потребления энергии в области, где это становится все более важным.
На пути к более широкому использованию в будущем
Мы можем ожидать, что в будущем двигатели BLDC будут использоваться в более широком диапазоне приложений.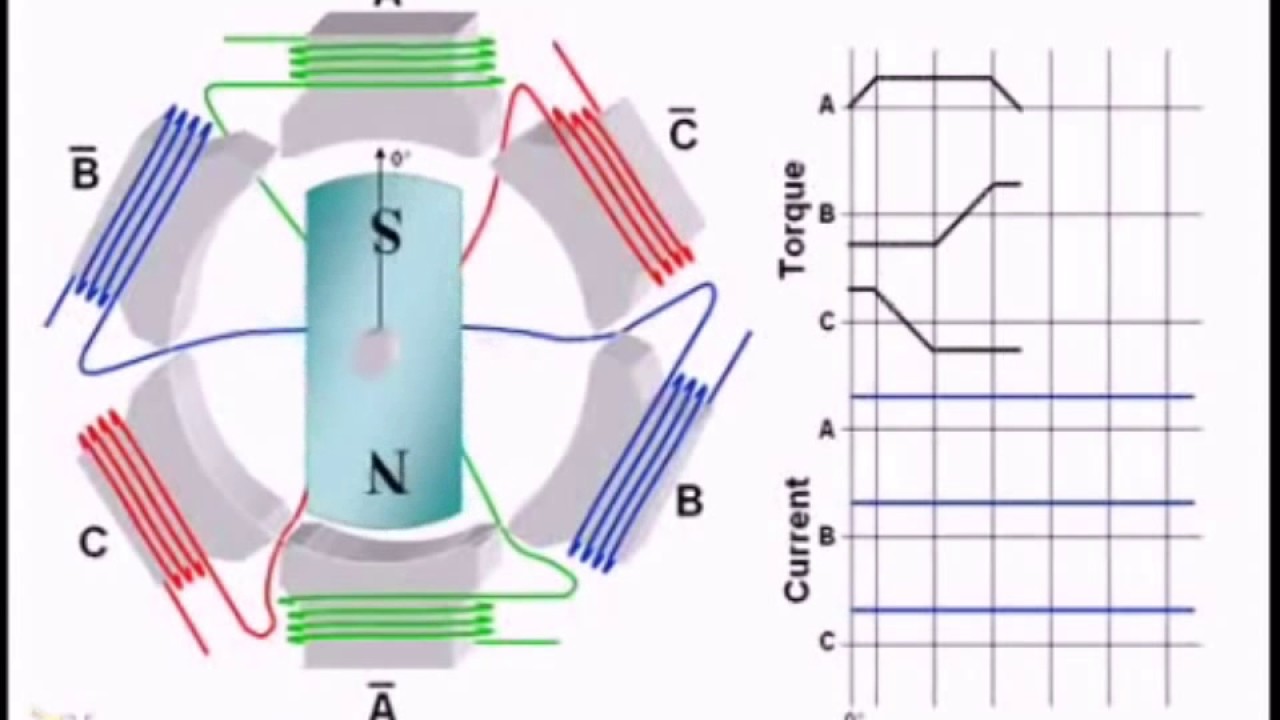 Например, они, вероятно, будут широко использоваться для управления сервисными роботами — небольшими роботами, которые предоставляют услуги не только в производстве, но и в других областях. Можно подумать, что шаговые двигатели больше подходят для этого типа приложений, где для точного управления позиционированием можно использовать импульсы. Но двигатели BLDC лучше подходят для управления силой. А с шаговым двигателем, чтобы удерживать такую конструкцию, как рука робота, потребуется относительно большой и непрерывный ток. Для двигателя BLDC все, что потребуется, — это ток, пропорциональный внешней силе, что обеспечивает более энергоэффективное управление.Двигатели BLDC могут также заменить простые щеточные двигатели постоянного тока в тележках для гольфа и мобильных тележках. Помимо большей эффективности, двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может еще больше продлить срок службы батарей.
Например, они, вероятно, будут широко использоваться для управления сервисными роботами — небольшими роботами, которые предоставляют услуги не только в производстве, но и в других областях. Можно подумать, что шаговые двигатели больше подходят для этого типа приложений, где для точного управления позиционированием можно использовать импульсы. Но двигатели BLDC лучше подходят для управления силой. А с шаговым двигателем, чтобы удерживать такую конструкцию, как рука робота, потребуется относительно большой и непрерывный ток. Для двигателя BLDC все, что потребуется, — это ток, пропорциональный внешней силе, что обеспечивает более энергоэффективное управление.Двигатели BLDC могут также заменить простые щеточные двигатели постоянного тока в тележках для гольфа и мобильных тележках. Помимо большей эффективности, двигатели BLDC также могут обеспечивать более точное управление, что, в свою очередь, может еще больше продлить срок службы батарей.
BLDC также идеально подходят для дронов. Их способность обеспечивать точное управление делает их особенно подходящими для многороторных беспилотных летательных аппаратов, где положение беспилотника регулируется путем точного управления скоростью вращения каждого ротора.
Их способность обеспечивать точное управление делает их особенно подходящими для многороторных беспилотных летательных аппаратов, где положение беспилотника регулируется путем точного управления скоростью вращения каждого ротора.
На этом занятии мы увидели, как двигатели BLDC обеспечивают превосходную эффективность, управляемость и долговечность.Но тщательный и надлежащий контроль необходим для полного использования потенциала этих двигателей. На следующем занятии мы рассмотрим, как работают эти двигатели.
Список модулей
- Что такое бесщеточные двигатели постоянного тока
- Управление двигателями BLDC
- Решения Renesas для управления двигателями BLDC
Бесщеточный DC | Принцип работы двигателя BLDC
Привет, друзья, в этой статье я предоставляю вам основную информацию о бесщеточном двигателе постоянного тока i.е. Двигатель BLDC. С помощью этой информации вы можете легко понять принцип работы двигателя BLDC .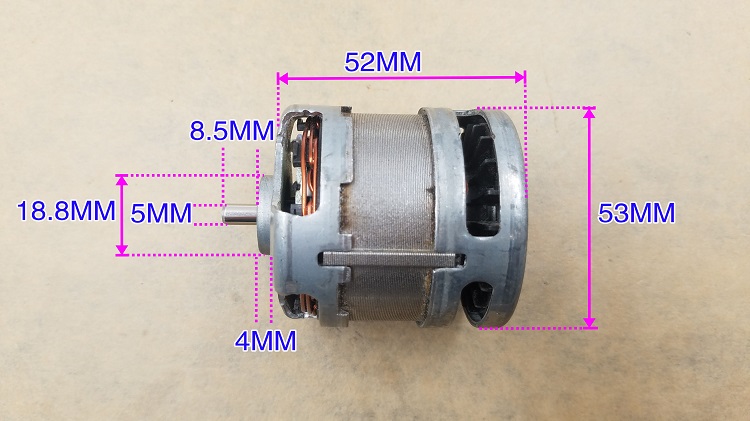
В отличие от обычного двигателя постоянного тока, бесщеточный двигатель постоянного тока имеет конструкцию «наизнанку-наружу», то есть полюса возбуждения вращаются, а якорь неподвижен. Полюса возбуждения состоят из постоянных магнитов, установленных внутри стального цилиндра, а якорь намотан на пластинчатую железную конструкцию с прорезями. Катушки якоря переключаются транзисторами или кремниевыми выпрямителями (вместо коммутатора) в правильном положении ротора для поддержания поля якоря в пространственной квадратуре с полюсами поля.
Терминология для описания бесщеточных двигателей постоянного тока еще не стандартизирована. Их называют даже разными именами, такими как «бесколлекторный двигатель постоянного тока», «двигатель постоянного тока с электронной коммутацией», «самосинхронная машина» и другие.
Каждый тип двигателя описывается либо количеством фаз обмотки статора, импульсами тока, подаваемыми на обмотки транзисторами или тиристорами, либо количеством полюсов на роторе. Следующая классификация бесщеточных двигателей постоянного тока также полезна для понимания принципа работы двигателя BLDC :
Однофазный бесщеточный двигатель постоянного тока с одним импульсом
Статор этого двигателя имеет только однофазную обмотку, которая активируется транзистором один раз за электрический оборот.Выходной крутящий момент такого двигателя совершенно недостаточен, потому что в лучшем случае он может создавать только положительный крутящий момент более 180 электрических градусов. Оставшееся угловое вращение должно преодолеваться инерцией ротора или большим количеством вспомогательных моментов. (см. рисунок а)
Однофазный, двухимпульсный бесщеточный двигатель постоянного тока
Статор этого двигателя также имеет только однофазную обмотку, но принимает два импульса, то есть его обмотка возбуждается двумя импульсами тока противоположных направлений.Таким образом, результирующее распределение крутящего момента более благоприятно, чем у одноимпульсного двигателя.
По-прежнему постоянный электромагнитный момент не достигается. Есть еще небольшие участки без крутящего момента, которые необходимо перекрыть стабильными вспомогательными средствами. Преимущество этого двигателя — его простая конструкция, обеспечивающая высокий коэффициент использования материала якоря. (см. рисунок b)
Двухфазный бесщеточный двигатель постоянного тока с двумя импульсами
Статор такого двигателя имеет две фазные обмотки, которые поочередно возбуждаются двумя импульсами тока.Следовательно, создаваемый крутящий момент в основном такой же, как у однофазного двухимпульсного двигателя. Тем не менее, обмотка будет загружена только на 50 процентов.
Преимущество этого двигателя проявляется в его простой управляющей электронике. Промежутки электромагнитного момента должны перекрываться соответствующими вспомогательными средствами, как в однофазном двигателе. (см. рисунок c)
Трехфазный, трехимпульсный бесщеточный двигатель постоянного тока
Этот двигатель имеет статор с трехфазной обмоткой, которая смещена в пространстве на 120 o электрических.Каждая фазная обмотка возбуждается одним импульсом, то есть за один электрический оборот; на статор циклически подаются три импульса тока.
Тот факт, что требуются только три силовых транзистора или тиристора, является главным преимуществом этой конструкции двигателя. Одним из недостатков является относительно низкое использование обмотки (в среднем почти 33%), а также необходимость трех датчиков положения. (см. рисунок d)
Четырехфазный, четырехимпульсный бесщеточный двигатель постоянного тока
Статор этого двигателя намотан четырехфазными обмотками, электрически смещенными в пространстве на 90 °.Фазные обмотки циклически запитываются четырьмя импульсами смородины. Это приводит к крутящему моменту без зазоров и использованию обмотки до 50%. Однако затраты на электронику вдвое больше, чем у двухимпульсной схемы. (см. рисунок e)
Статор этого двигателя имеет трехфазные обмотки, которые можно соединять как треугольником, так и звездой. Обычно нейтральная точка не используется. Обмотки возбуждаются шестью импульсами шестью силовыми транзисторами или тиристорами в циклической последовательности.
Такой двигатель не только обеспечивает равномерный выходной крутящий момент, но и оптимальное использование обмотки. Его недостаток — относительно высокая стоимость датчиков положения и управляющей электроники.
Это приводит к наиболее распространенному бесщеточному двигателю постоянного тока — комбинации трехфазного синхронного двигателя с постоянными магнитами, трехфазного твердотельного инвертора и датчика положения ротора, что приводит к системе, обеспечивающей линейную характеристику крутящего момента скорости, как в обычном постоянном магнитном потоке. мотор.
На рисунке схематично показан 3-фазный 6-пульсный бесщеточный двигатель постоянного тока, использующий транзисторный инвертор в качестве преобразователя постоянного тока в переменный. Там, где существуют высокие требования к мощности, вместо транзисторов используются тиристоры.
Другие функции, такие как стоимость компонентов, надежность компонентов и простота схемы инвертора (в связи с необходимостью коммутации схемы для отключения тиристоров, что не является необходимым для транзисторов), имеют большое значение там, где тиристоры и транзисторы с сопоставимыми возможностями обработки мощности имеется в наличии.
Неотъемлемой частью системы бесщеточного двигателя постоянного тока является датчик положения ротора. Хотя для определения углового положения доступно несколько методов, наиболее часто используются датчики на эффекте Холла и электрооптические датчики.
Преимущества бесщеточного двигателя постоянного тока
Бесщеточные двигатели постоянного тока имеют ряд преимуществ перед обычными двигателями постоянного или переменного тока, такими как:
- отсутствие механического переключателя и связанных с этим проблем,
- высокий КПД,
- высокоскоростная работа,
- меньше проблем, вызванных радиочастотными и электромагнитными помехами и
- долгая жизнь.
Применение бесщеточных двигателей постоянного тока
- В приложениях с большей мощностью, включая тяговые, бесщеточные двигатели быстро заменяют обычные двигатели постоянного тока.
- Типичное применение малой мощности — вентиляторы постоянного тока для охлаждения электронного оборудования.
- Еще одно важное применение — шпиндельные приводы для дисковой памяти.
- Другие области применения — фонографы и ленточные накопители.
- Бесщеточные двигатели постоянного тока малой мощности используются в различных типах приводов в современных самолетах и спутниковых системах. Бесщеточные двигатели постоянного тока с интегральной мощностью
- разработаны для силовых установок и прецизионных сервосистем.
Спасибо, что прочитали о «Принципе работы двигателя BLDC».
Двигатели постоянного тока | Все сообщения
Бесщеточный двигатель постоянного тока— конструкция, принцип работы и преимущества
Что такое бесщеточный двигатель постоянного или BLDC?Бесщеточный двигатель постоянного тока, BLDC выполняет коммутацию электронным способом, используя обратную связь по положению ротора, чтобы определить, когда следует переключать ток.Двигатель BLDC электрически коммутируется выключателями питания вместо щеток. Структура бесщеточного двигателя постоянного тока BLDC показана на рисунке ниже.
Проще говоря, BLDC не имеет щеток и коммутатора для однонаправленного крутящего момента, а для достижения однонаправленного крутящего момента используется встроенная схема инвертора / переключения. Вот почему эти двигатели иногда также называют двигателями с электронной коммутацией .
Конструкция двигателя BLDC:Как и любой другой электродвигатель, двигатель BLDC также имеет статор и ротор.Здесь мы рассмотрим статор и ротор по отдельности с точки зрения конструкции.
BLDC Статор:Электродвигатели BLDC бывают трех типов:
Статор каждого типа имеет одинаковое количество обмоток. Наиболее широко используются однофазные и трехфазные двигатели. Упрощенное поперечное сечение однофазного и трехфазного двигателя BLDC показано на рисунке ниже. Ротор имеет постоянные магниты, образующие две пары магнитных полюсов, и окружает статор с обмотками.
Однофазный двигатель имеет одну обмотку статора, намотанную либо по часовой стрелке, либо против часовой стрелки вдоль каждого плеча статора, чтобы создать четыре магнитных полюса, как показано на рисунке выше.
Трехфазный двигатель BLDC имеет три обмотки. Каждая фаза включается последовательно, чтобы ротор вращался.
Ротор:Ротор состоит из вала и ступицы с постоянными магнитами, образующими от двух до восьми пар полюсов, которые чередуются между северным и южным полюсами.На рисунке ниже показаны поперечные сечения трех типов магнитных устройств в роторе.
Как работает бесщеточный двигатель постоянного тока?BLDC Работа двигателя основана на притяжении или отталкивании между магнитными полюсами. При использовании трехфазного двигателя, как показано на рисунке ниже, процесс начинается, когда ток течет через одну из трех обмоток статора и генерирует магнитный полюс, который притягивает ближайший постоянный магнит противоположного полюса.
Ротор будет двигаться, если ток переместится на соседнюю обмотку.Последовательная зарядка каждой обмотки заставит ротор следовать во вращающемся поле. Крутящий момент в этом примере зависит от амплитуды тока и количества витков на обмотках статора, силы и размера постоянных магнитов, воздушного зазора между ротором и обмотками и длины вращающегося плеча.
Анимация для лучшего понимания двигателя BLDC: Преимущество двигателя BLDC:По сравнению с щеточным электродвигателем постоянного тока или асинхронным электродвигателем, электродвигатель BLDC имеет множество преимуществ:
- Повышенная эффективность и надежность
- Лучшая скорость по сравнению с крутящим моментом
Как работают бесщеточные двигатели и ESC
В этом уроке мы узнаем, как работают бесщеточный двигатель и ESC.Эта статья является первой частью следующего видео, где мы узнаем принцип работы бесщеточного двигателя постоянного тока и ESC (электронного регулятора скорости), а во второй части мы узнаем, как управлять двигателем BLDC с помощью Arduino.
РЕКОМЕНДУЕТСЯ
Как это работает
Двигатель BLDC состоит из двух основных частей: статора и ротора. На этом рисунке ротор представляет собой постоянный магнит с двумя полюсами, а статор состоит из катушек, расположенных, как показано на рисунке ниже.
Все мы знаем, что если мы пропустим ток через катушку, она будет генерировать магнитное поле, а силовые линии или полюса магнитного поля зависят от направления тока.
Итак, если мы подадим соответствующий ток, катушка будет генерировать магнитное поле, которое будет притягивать постоянный магнит ротора. Теперь, если мы активируем каждую катушку одну за другой, ротор будет продолжать вращаться из-за силового взаимодействия между постоянным током и электромагнитом.
Чтобы повысить эффективность двигателя, мы можем намотать две противоположные катушки как одну катушку таким образом, чтобы они генерировали полюса, противоположные полюсам ротора, таким образом, мы получим двойную силу притяжения.
С этой конфигурацией мы можем создать шесть полюсов статора с помощью всего трех катушек или фаз. Мы можем еще больше повысить эффективность, запитав две катушки одновременно. Таким образом, одна катушка будет притягиваться, а другая — отталкивать ротор.
Для того, чтобы ротор совершил полный цикл на 360 градусов, ему необходимо шесть шагов или интервалов.
Если мы посмотрим на форму волны тока, мы можем заметить, что в каждом интервале есть одна фаза с положительным током, одна фаза с отрицательным током и третья фаза отключена.Это дает представление о том, что мы можем соединить свободные конечные точки каждой из трех фаз вместе и поэтому мы можем разделить ток между ними или использовать один ток для одновременного питания двух фаз.
Вот пример. Если мы поднимем фазу A High или подключим ее к положительному постоянному напряжению с помощью какого-либо переключателя, например MOSFET, а с другой стороны подключим фазу B к земле, тогда ток будет течь от VCC через фаза A, нейтральная точка и фаза B, заземлены.Таким образом, с помощью всего лишь одного потока тока мы создали четыре разных полюса, которые заставляют ротор двигаться.
В этой конфигурации у нас фактически есть соединение фаз двигателя звездой, где нейтральная точка соединена внутри, а три других конца фаз выходят из двигателя, и поэтому у бесщеточного двигателя три провода выходят из него.
Итак, для того, чтобы ротор совершил полный цикл, нам просто нужно активировать правильные два MOSFET в каждом из 6 интервалов, и это то, что на самом деле все ESC.
Как работает шаговый двигательИз этого туториала Вы узнаете, как работает шаговый двигатель. Мы расскажем об основных принципах работы шаговых двигателей, их режимах работы и…
ESC или электронный контроллер скорости управляет движением или скоростью бесщеточного двигателя, активируя соответствующие полевые МОП-транзисторы для создания вращающегося магнитного поля, так что двигатель вращается. Чем выше частота или чем быстрее ESC проходит через 6 интервалов, тем выше будет скорость двигателя.
Однако возникает важный вопрос: как узнать, когда активировать какую фазу. Ответ заключается в том, что нам нужно знать положение ротора, и есть два общих метода, используемых для определения положения ротора.
Первый распространенный метод заключается в использовании датчиков Холла, встроенных в статор, расположенных одинаково на 120 или 60 градусов друг от друга.
Когда постоянные магниты ротора вращаются, датчики на эффекте Холла воспринимают магнитное поле и генерируют логический «высокий» для одного магнитного полюса или логический «низкий» для противоположного полюса.Согласно этой информации ESC знает, когда активировать следующую последовательность коммутации или интервал.
Второй распространенный метод, используемый для определения положения ротора, заключается в измерении обратной электродвижущей силы или обратной ЭДС. Обратная ЭДС возникает в результате прямо противоположного процесса генерации магнитного поля или когда движущееся или изменяющееся магнитное поле проходит через катушку, оно индуцирует ток в катушке.
Итак, когда движущееся магнитное поле ротора проходит через свободную катушку или ту, которая не активна, оно вызывает ток в катушке, и в результате в этой катушке происходит падение напряжения.ESC фиксирует эти падения напряжения по мере их возникновения и на их основе предсказывает или рассчитывает, когда должен произойти следующий интервал.
Итак, это основной принцип работы бесщеточных двигателей постоянного тока и ESC, и он остается неизменным, даже если мы увеличим количество полюсов как ротора, так и статора. У нас по-прежнему будет трехфазный двигатель, только количество интервалов увеличится, чтобы завершить полный цикл.
Здесь мы также можем упомянуть, что двигатели BLDC могут быть инерционными или опережающими.Бесщеточный двигатель с внутренним ходом имеет постоянные магниты внутри электромагнитов, и наоборот, двигатель с внешним рабочим ходом имеет постоянные магниты вне электромагнитов. Опять же, они используют один и тот же принцип работы, и у каждого из них есть свои сильные и слабые стороны.
Хорошо, хватит теории, теперь давайте продемонстрируем и посмотрим в реальной жизни то, что мы объяснили выше. Для этого мы подключим три фазы бесщеточного двигателя к осциллографу. Я соединил 3 резистора в одной точке, чтобы создать виртуальную нейтральную точку, а с другой стороны я подключил их к трем фазам двигателя BLDC.
Первое, что мы можем здесь заметить, — это три синусоидальные волны. Эти синусоидальные волны на самом деле являются обратным EFM, генерируемым в неактивных фазах.
Мы видим, что при изменении частоты вращения двигателя частота синусоидальных волн изменяется, а также их амплитуда. Чем выше частота вращения, тем выше частота и амплитуда синусоидальных волн обратной ЭДС. Однако на самом деле двигателем движут эти пики, которые являются активными фазами, которые генерируют изменяющееся магнитное поле.
Мы можем заметить, что в каждом интервале есть две активные и одна неактивная фазы. Например, здесь у нас активны фазы A и B, а фаза C неактивна. Затем у нас активны фазы A и C, в то время как фаза B неактивна, и так далее.
Здесь я хотел бы поблагодарить Banggood.com за предоставление мне этого осциллографа. Это Rigol DS1054Z, и это один из лучших осциллографов начального уровня в своей ценовой категории. Он имеет четыре входных канала, полосу пропускания 50 МГц, которая может быть взломана до 100 МГц, имеет частоту дискретизации 1 Гвыб / с и относительно большую глубину памяти 24 Мбайт.
Дисплей 7 дюймов, он действительно красивый и яркий. Он имеет различные математические функции, фильтры нижних и верхних частот, декодирование SPI и I2C и многое другое. Итак, еще раз большое спасибо Banggood.com и не забудьте проверить этот осциллограф в их магазине.
Тем не менее, это основной принцип работы бесщеточного двигателя. Если вам нужны более реальные живые примеры и вы узнаете, как управлять моторами с помощью Arduino, вам следует проверить вторую часть этого руководства.
Надеюсь, вам понравился этот урок и вы узнали что-то новое.