диэлектрические средства индивидуальной страницы
Перчатки резиновые диэлектрические (шовные)
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Гарантийный срок хранения 1 год со дня изготовления ТУ 38.30505257-89
Условная прочность при растяжении: 11,5 МПа
Относительное удлинение при разрыве: 780%
Относительная остаточная деформация после разрыва: 18%
Сопротивление раздиру: 16 клН/м
Прочность шва при разрыве: 31 Н/см
Коэффициент морозостойкости при температуре 30оС: 0.86
Диэлектрические свойства — при напряжении 9,0 -/+ 0,2) кВ переменного тока частотой (50 -/+1 Гц) действующего в течении (60 -/+1) сек.
Ток утечки не превышает 9мА
Перчатки резиновые диэлектрические (бесшовные)
Предназначены для защиты рук от поражения электрическим током при работе в электроустановках до 1000 В в качестве основного изолирующего электрозащитного средства, а в электроустановках выше 1000 В в качестве дополнительного.
 Перчатки сертифицированы.
Перчатки сертифицированы. Боты резиновые диэлектрические
Назначение:
Боты предназначены для дополнительной защиты от электрического тока при работе на закрытых и, при отсутствии осадков, на открытых электроустановок, при напряжении 20 Кв и при температуре от -30 до +50оС.
Размеры выпускаемых бот: 39 (292), 40(300), 41 (307), 42(315), 43 (300), 44 (337), 45 (345)
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ:
Условная прочность не менее: 8,9 МПа
Относительное удлинение не менее: 550%
Ток утечки не более 10 мА
ХРАНЕНИЕ:
Должны храниться в складских помещениях при температуре от 0 до +25оС на расстоянии 1 м. от отопительных приборов. Обувь должна быть защищена от действия прямых солнечных лучей, воздействия масел, бензина, кислот, щелочей и др. агрессивных сред. Гарантийный срок хранения: 12 мес.
Обувь должна быть защищена от действия прямых солнечных лучей, воздействия масел, бензина, кислот, щелочей и др. агрессивных сред. Гарантийный срок хранения: 12 мес.
Галоши резиновые диэлектрические
Назначение:
Для защиты от электрического тока при работе на закрытых и, при отсутствии осадков, на открытых электроустановок, при напряжении до 1Кв и температуре от -30 до +50оС.
Размеры: 41, 42, 43, 44, 45, 46
ХРАНЕНИЕ:
Галоши должны состоять из резинового верха с утолщением по борту и резиновой рифлёной по-дошвы. Обувь изготовляют светло-серого или бежевого цвета.
Галоши должны эксплуатироваться при температуре не ниже -30оС. После носки внутреннюю часть галош протирают сухой тканью.
Коврик диэлектрический
НАЗНАЧЕНИЕ:
Для дополнительной защиты в закрытых электроустановках напряжением свыше 1000 В, кроме особо сырых помещений, и в открытых электроустановках и сухую погоду.
ХРАНЕНИЕ:
Ковры должны хранится при температуре от 0 до +30°С без деформации и повреждения. При этом они должны быть защищены от воздействия прямых солнечных лучей и находится от отопительных приборов на расстоянии не менее 1 м.
Допускается хранить ковры в не отапливаемых помещениях при температуре не ниже -25°С. После хранения при отрицательной температуре ковры перед употреблением должны быть выдержанны в упакованном виде при температуре (20±5)°С не менее 24 ч.
РАЗМЕРЫ:
500 Х 500 Х 6мм.
600 Х 600 Х 6мм.
700 Х 700 Х 6мм.
750 Х 750 Х 6мм.
900 Х 900 Х 6мм.
1000 Х 1000 Х 6мм.
Диэлектрические перчатки, галоши и диэлектрические ковры
Средства диэлектрической защиты.
Для того чтобы обезопасить себя от возможных травм вследствие контактов с высоким напряжением, существуют средства диэлектрической защиты. Применение таких средств защиты фактически исключает несчастные случаи, к которым приводит небрежное обращение с электричеством. Из наиболее применяемых средств защиты можно назвать диэлектрические перчатки — латексные или штанцованные, диэлектрические боты и специальные коврики из токонепроводящего материала. А далее мы расскажем вам подробнее о данных средствах диэлектрической защиты.
Применение таких средств защиты фактически исключает несчастные случаи, к которым приводит небрежное обращение с электричеством. Из наиболее применяемых средств защиты можно назвать диэлектрические перчатки — латексные или штанцованные, диэлектрические боты и специальные коврики из токонепроводящего материала. А далее мы расскажем вам подробнее о данных средствах диэлектрической защиты.
Перчатки диэлектрические штанцованные:
Перчатки диэлектрические штанцованные предназначены для защиты рук персонала от поражения электрическим током, электростатических зарядов и полей, электрических и электромагнитных полей. Штанцованные перчатки используются как основное средство защиты рук, от поражения электрическим током до 1000 В. Эластичны в условиях низких температур.
Технические характеристики:
- Срок хранения 6 месяцев
- ТУ 38 305-05-257-89
- Длина, мм 360
- Ширина краги, мм 145 ± 10
- Толщина перчатки, 12 мм
- Коэффициент морозостойкости при температуре -30°С, не менее 0,85
Перчатки диэлектрические латексные:
Перчатки диэлектрические латексные предназначены для защиты персонала от поражения электрическим током, электростатических зарядов и полей, электрических и электромагнитных полей. Латексные перчатки используются как основное средство защиты рук от поражения электрическим током до 1000 В.
Латексные перчатки используются как основное средство защиты рук от поражения электрическим током до 1000 В.
Технические характеристики:
- Срок хранения 6 месяцев
- Натуральный латекс ТУ 38.306-5-63-97
- Длина, мм 360
- Ширина краги, мм 145 ± 10
- Толщина перчатки, мм 0,4
- Коэффициент морозостойкости при температуре -30°С, не менее 0,85
Боты и калоши диэлектрические:
Предназначены в качестве дополнительного средства защиты от действия электрического тока напряжением свыше 1 кВ при работе в закрытых и открытых (при отсутствии осадков) электроустановках.
Технические характеристики:
- температурный режим от –30°С до +50°С
- Размеры: 39 – 46. ГОСТ 13385-78
- Цвета: светло-серые, бежевые, коричневые.
- Напряжением свыше 1 кВ.
Коврики диэлектрические:
Применяются в качестве дополнительного защитного средства в закрытых электроустановках напряжением свыше 1000 В и в открытых электроустановках в сухую погоду. Ковры выпускаются первой группы для работы при температуре от — 15 до +400С. У нас в наличие всегда имеются коврики следующих размеров (мм):
Ковры выпускаются первой группы для работы при температуре от — 15 до +400С. У нас в наличие всегда имеются коврики следующих размеров (мм):
- Коврик диэлектрический 500 х 500
- Коврик диэлектрический 600 х 600
- Коврик диэлектрический 700 х 700
- Коврик диэлектрический 750 х 750
|
Электрозащитные средства предназначены для работы с электрооборудованием. Три вида средств особенно известны и популярны: Диэлектрические перчатки бесшовныеДиэлектрические перчатки оберегают ладони и пальцы от электрического тока. Они надежно изолируют кожу при случайном прикосновении к включённой электрической цепи напряжением до 1000 В и поэтому являются основным средством защиты при обслуживании силовых установок до 1000 В. В установках выше 1000 В перчатки служат дополнительным средством защиты, то есть сами по себе не обеспечивают полной безопасности, но усиливают действие других защитных средств. Технические характеристики
Правила использования
ХранениеИзделия хранят при температуре от 0°C до +25°C и относительной влажности не выше 75%. Их необходимо защитить от прямых солнечных лучей и держать на расстоянии не менее 1 м от приборов отопления. Не допускается попадание на латекс масел, бензина и других агрессивных веществ. Диэлектрические боты и галошиДиэлектрические боты и галоши предназначены для нейтрализации шагового напряжения. Эти средства электрозащиты относятся к дополнительным, иначе говоря, их применяют только совместно с другими средствами, чтобы достичь необходимой степени безопасности. Технические характеристики
Правила использования
ХранениеДиэлектрическую обувь следует хранить на складе при температуре от 0 до + 25°C не ближе 1 м к отоплению. На неё не должны попадать прямые солнечные лучи и брызги масла, бензина, кислот и др. Диэлектрические коврыДиэлектрические коврики из резины входят в число дополнительных средств электрозащиты. Они изолируют поверхность под человеком и не дают току пойти через его тело. Коврики применяют в закрытых, а при сухой погоде – и в открытых электроустановках любого напряжения. Их расстилают на полу перед рубильниками, разъединителями, выключателями, блоками управления и т. п. устройствами. Кроме того, резиновые коврики обязательно укладывают в помещениях, где есть риск случайно прикоснуться к токоведущим элементам, а также при обслуживании различного электрооборудования: сборок, щитов, колец, электродвигателей, испытательных стендов. Технические характеристики
Хранение
|


 Диэлектрические галоши используют в электроустановках до 1000 В (и, соответственно, маркируют «Эн»), а диэлектрические боты – при всех классах напряжения (и маркируют «Эв»).
Диэлектрические галоши используют в электроустановках до 1000 В (и, соответственно, маркируют «Эн»), а диэлектрические боты – при всех классах напряжения (и маркируют «Эв»).
 веществ, которые могут разъесть резину.
веществ, которые могут разъесть резину. Результаты проверки заносятся в специальный журнал. При выявлении трещин, изломов, проколов или надрывов коврик необходимо заменить.
Результаты проверки заносятся в специальный журнал. При выявлении трещин, изломов, проколов или надрывов коврик необходимо заменить.Боты диэлектрические (галоши диэлектрические), диэлектрические боты галоши, диэлектрическая продукция
Обеспечим выгодные цены . Пишите [email protected]
Галоши диэлектрические и боты диэлектрические. применяются как дополнительное средство защиты от электрического тока при работе на закрытых и открытых (при отсутствии осадков) электроустановках, при напряжении свыше 1000В.
применяются как дополнительное средство защиты от электрического тока при работе на закрытых и открытых (при отсутствии осадков) электроустановках, при напряжении свыше 1000В.
Диэлектрические галоши выдерживают испытательное напряжение 15 кВ переменного тока частотой 50 Гц.
Вы можете заказать и приобрести в нашей компании весь спектр электротехнической продукции.
Звоните!!! (499) 290-30-16 (мнгк), (495) 973-16-54, 740-42-64, 973-65-17
Цена на диэлектрические боты и галоши указана из расчета оптового или мелкооптового объема покупки. При розничных заказах возможно увеличение цены от 5% до 15%.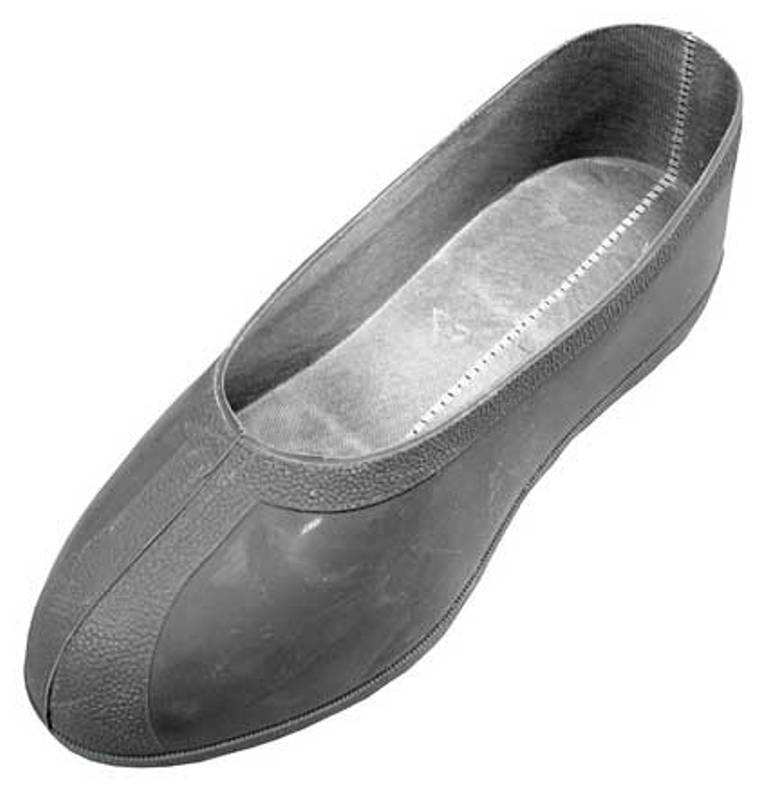 Купить диэлектрические боты и галоши могут юридические лица путем запроса счета и безналичной оплаты. Физические лица оплачивают выставленный счет через Сбербанк. диэлектрические боты и галоши является стандартной складской позицией. Срок поставки обычно не превышает 1-3 дня с момента оплаты. Запросить сертификат, отказное письмо или технические характеристики на диэлектрические боты и галоши можно отправив отдельный запрос на почту [email protected]. Отгрузка продукции осуществляется с центрального склада (Москва, Медведково). Возможна доставка по Москве , Московской области и отправка в регионы России. Купить диэлектрические боты и галоши могут юридические лица путем запроса счета и безналичной оплаты. Физические лица оплачивают выставленный счет через Сбербанк. диэлектрические боты и галоши является стандартной складской позицией. Срок поставки обычно не превышает 1-3 дня с момента оплаты. Запросить сертификат, отказное письмо или технические характеристики на диэлектрические боты и галоши можно отправив отдельный запрос на почту [email protected]. Отгрузка продукции осуществляется с центрального склада (Москва, Медведково). Возможна доставка по Москве , Московской области и отправка в регионы России. |
Боты диэлектрические с поверкой (Завод РТИ)
Боты диэлектрические с протоколом испытаний!
Диэлектрические боты предназначены для дополнительной защиты от электрического тока при работе на закрытых и, при отсутствии осадков, на открытых электроустановках при напряжении свыше 1 кВт. Изделие полностью сохраняет свойства при температуре от -30 до +50°С.
Изделие полностью сохраняет свойства при температуре от -30 до +50°С.
Любые боты и галоши диэлектрические ГОСТ соблюдают согласно предъявленным требованиям и представляют собой эргономичное, практичное и безопасное средство защиты. Такая обувь может иметь отличия по цвету, если сравнивать ее с остальной обувью, которая изготовлена из резины. Подошва в таком случае рифленая, выполненная из резины, верх также резиновый, подкладки – текстильная. Имеются также внутренние детали усиления.
Технические характеристики:Диэлектрические свойства бот характеризуются током утечки. Ток утечки пр напряжении 20 кВ и длительности испытания 2 мин не должен превышать 10 мА.
Высота бот должна быть не менее 160 мм.
Истинные значения физико-механических показателей резин, применяемых для изготовления бот, должны соответствовать нормам.
| Наименование показателей | Норма |
|---|---|
| Условная прочность, МПа, не менее | 8,0 |
| Относительное удлинение, %, не менее | 550 |
Боты, производимые Заводом РТИ, отличаются повышенной прочностью, эластичностью, удобной эргономичной формой, подходящей к большинству моделей современной обуви.
Боты должны храниться в складских помещениях при температуре от 0 до +25°С на расстоянии не менее 1 м от отопительных приборов. Обувь должна быть защищена от действия прямых солнечных лучей, воздействия масел, бензина, кислот, щелочей и др. агрессивных сред.
Хранение бот в потребительской таре должно производиться на стеллажах или деревянных настилах штабелями высотой не более 2 м.
Срок эксплуатацииСредний календарный срок эксплуатации бот — 18 месяцев со дня ввода их в эксплуатацию.
(PDF) Разработка мягких роботов с использованием приводов из диэлектрического эластомера
имеют сильно зависящий от времени характер35. Дальнейшие разработки в области контроля диэлектрических эластомеров дадут больше
стимулов для использования диэлектрических эластомеров в мягких роботах.
Кроме того, интеграция различных технологий мягкого робота / мягкого срабатывания будет следующим шагом в улучшении функциональности
мягких роботов. Другие технологии, такие как гранулированное заклинивание36, пневматическое срабатывание37, конструкции оригами38,
Другие технологии, такие как гранулированное заклинивание36, пневматическое срабатывание37, конструкции оригами38,
диэлектрический эластомерный датчик31 и т. Д., можно комбинировать друг с другом, чтобы получить интересную функциональность.
ПОДТВЕРЖДЕНИЕ
J.Z. благодарит за поддержку MOE Tier 1, Сингапур (R-265-000-497-112) и JPP, Сингапур (R-265-000-547-133
и R-265-000-547-232).
ССЫЛКИ
[1] Толли, М. Т., Шеперд, РФ, Мосадег, Б., Галлоуэй, К. К., Венер, М., Карпельсон, М., Вуд, Р. Дж.,
Уайтсайдс, Г. М., «Устойчивый, отвязанный мягкий робот », Soft Robot.2014. Т. 1. № 3. С. 213–223.
[2] Ким, Б., Ли, М. Г., Ли, Ю. П., Ким, Ю., Ли, Г., «Микро-робот, похожий на дождевого червя, использующий привод из сплава
с памятью формы», Датчики и приводы A Phys. 125 (2), 429–437 (2006).
[3] Пелрин, Р., Корнблу, Р. Д., Пей, К., Стэнфорд, С., О, С., Экерл, Дж., Фулл, Р. Дж., Розенталь, Массачусетс, М., Мейер, К.,
«Исполнительные механизмы искусственных мышц из диэлектрического эластомера: к биомиметическому движению», 9-я ежегодная конференция SPIE. Int. Symp. Смарт
Int. Symp. Смарт
Struct.Матер., 126–137 (2002).
[4] Шеперд, Р.Ф., Илиевски, Ф., Чой, В., Морин, С.А., Стокс, А.А., Маццео, А.Д., Чен, X., Ван, М.,
Уайтсайдс, Г.М., «Multigait мягкий робот », Тр. Natl. Акад. Sci. 108 (51), 20400–20403 (2011).
[5] Рус, Д., Толлей, М. Т., «Проектирование, изготовление и управление мягкими роботами», Nature 521 (7553), 467–475 (2015).
[6] Пелрин Р., «Высокоскоростные эластомеры с электрическим приводом с деформацией более 100%», Science (80-.). 287,
836–839 (2000).
[7] Эшли С., «Искусственные мышцы», Sci. Являюсь. 289 (4), 52–59 (2003).
[8] Суо, З., «Теория диэлектрических эластомеров», Acta Mech. Solida Sin. 23. С. 549–578 (2010).
[9] Пей, К., Розенталь, М. А., Пелрин, Р., Стэнфорд, С., Корнблу, Р. Д., «Многофункциональные электроэластомерные рулонные приводы
и их применение в биомиметических шагающих роботах», Smart Struct. Матер., 281–290 (2003).
[10] Ковач, Г. , Лохматтер, П., Висслер, М., «Робот для армрестлинга, приводимый в движение исполнительными механизмами из диэлектрического эластомера»,
, Лохматтер, П., Висслер, М., «Робот для армрестлинга, приводимый в движение исполнительными механизмами из диэлектрического эластомера»,
Smart Mater. Struct. 16 (2), S306 (2007).
[11] Корнблух, Р.Д., Фламм, Д.С., Прахлад, Х., Нашолд, К.М., Чхокар, С., Пелрин, Р., Хуэстис, Д.Л., Саймонс, Дж.,
Купер, Т. и др. ., «Контроль формы больших легких зеркал с срабатыванием диэлектрического эластомера», Smart Struct.
Mater., Y. Bar-Cohen, Ed., 143–158 (2003).
[12] Коллоше, М., Чжу, Дж., Суо, З .., Кофод, Г., «Сложное взаимодействие нелинейных процессов в диэлектрических эластомерах»,
Phys. Ред. E 85 (5), 51801, Американское физическое общество (2012).
[13] Гупта, У., Годаба, Х., Чжао, З., Чуй, К. К., Чжу, Дж., «Регулируемая сила / смещение вибрационного шейкера, приводимого в действие
диэлектрическим эластомерным приводом», Extrem . Мех. Lett. 2. С. 72–77 (2015).
[14] Шинтаке, Дж., Россет, С., Шуберт, Б. Э., Флореано, Д. , Ши, Х. Р., «Складной антагонистический привод»,
, Ши, Х. Р., «Складной антагонистический привод»,
IEEE / ASME Trans.Мехатроника 20 (5), 1997–2008 (2015).
[15] Кеплингер, К., Ли, Т., Баумгартнер, Р., Суо, З .., Бауэр, С., «Использование мгновенной нестабильности в мягких диэлектриках
для достижения гигантской деформации, вызываемой напряжением. Мягкое вещество 8 (2), 285–288 (2012).
[16] Годаба, Х., Фу, К. С., Чжан, З. К., Кху, Б. С., Чжу, Дж., «Гигантская деформация под напряжением диэлектрического эластомера
под постоянным давлением», Прил. Phys. Lett. 112901, 8–12 (2014).
[17] Гоулборн, Н., Frecker, M. I., Mockensturm, E. M .., Snyder, A. J., «Моделирование диафрагмы из диэлектрического эластомера
для протезного насоса крови», Proc. SPIE 5051, 319–331 (2003).
[18] Петралиа, М. Т., Вуд, Р. Дж., «Изготовление и анализ структур диэлектрика-эластомера с минимальной энергией для
высокодеформируемых мягких роботизированных систем», 2010 IEEE / RSJ Int. Конф. Intell. Робот. Syst., 2357–2363, IEEE
Intell. Робот. Syst., 2357–2363, IEEE
(2010).
[19] Zhao, J., Niu, J., McCoul, D., Ren, Z.., Пей, Q., «Явления нелинейных колебаний и особый резонанс вращающегося соединения диэлектрической эластомерной структуры с минимальной энергией
«, Appl. Phys. Lett. 106 (13), 133504 (2015).
[20] Nawroth, JC, Lee, H., Feinberg, AW, Ripplinger, CM, McCain, ML, Grosberg, A., Dabiri, JO., Parker,
KK, «Медуза тканевой инженерии с биомиметиком. пропульсивная установка. », Nat. Biotechnol. 30 (8), 792–797 (2012).
[21] Стил Р. Э., Дэвид К. Н., Technau, U., «Геномный взгляд на 500 миллионов лет эволюции книдарий», Trends
Genet. 27 (1), 7–13 (2011).
Proc. SPIE Vol. 9798 97981T-8
Загружено с: http://proceedings.spiedigitallibrary.org/ 12.06.2016 Условия использования: http://spiedigitallibrary.org/ss/TermsOfUse.aspx
(PDF) Мягкая биомиметическая рыба Робот, сделанный из диэлектрического эластомера. Приводы
, жесткость корпуса можно модулировать для сдвига резонансных частот
, что приводит к большей амплитуде хвостовой части и силе осевого напора
на более высоких частотах. В формах робота
В формах робота
, представленных на рис. 4c, особенно в том, что соответствует
1,25 Гц, корпус имеет форму головки барабана из-за природы
DEA, которые вытянуты также в направлении плоскости
перпендикулярно к продольной оси (т. е. оси голова – хвост).
Это явление может быть дополнительной причиной расхождения между экспериментальными данными и моделью
, которая не учитывает этот эффект.Форма головки барабана
также может иметь отрицательное влияние на силу тяги. Если это так, то одним из решений
для предотвращения этого эффекта было бы регулирование степени растяжения DEA до
. Известно, что DEA деформируют
перпендикулярно направлению растяжения до
.
38
Следовательно, предварительное растяжение DEA также в направлении ширины
может быть полезным. Следовательно, предварительное растяжение
DEA также в направлении ширины может быть полезным.
На рисунке 5a показана последовательность действий робота, плывущего в условиях привязки
при частоте возбуждения 0,75 Гц
с приложенным напряжением 5 кВ (см. Также Дополнительное видео
Также Дополнительное видео
S1; дополнительные данные доступны на сайте www.
liebertpub.com/soro). Мы заметили, что плавание, демонстрируемое роботом, похоже на настоящую рыбу. На рисунке 5b
представлена скорость плавания при 0,75 Гц как функция приложенного напряжения
.Скорость плавания увеличивается с приложенным напряжением
. Во время плавания голова робота на
движется за счет сил отдачи, которые создают момент вокруг его центра масс
. Поэтому, в отличие от нашего предположения, конструкция робота
больше не рассматривается как идеальная консоль в условиях привязанного плавания
. Это очевидно на Рисунке 5a
, где голова робота вращается. Измеренное энергопотребление робота равно 0.92 Вт. Однако
это будет значительно уменьшено за счет использования стратегии питания
, в которой электрические заряды на конденсаторах DEA собираются
в каждом цикле. На протяжении экспериментов робот
не испытал пробоя диэлектрика. Тем не менее, при пробое
Тем не менее, при пробое
устройство может появиться при приложении напряжения, превышающего его пробивную прочность
, или как следствие ошибок изготовления.
На рисунке 5c показана зависимость скорости плавания от частоты возбуждения
при приложенном напряжении 5 кВ.Скорость плавания
имеет пиковое значение 37,2 мм / с (0,25 длины тела / с)
при 0,75 Гц и демонстрирует тенденцию, отличную от силы тяги
, которая имеет пики при 1,25 и 2,75 Гц. Различие положений пика
является результатом изменения граничных условий:
сдвигает значение резонансных частот. Мы предполагаем, что первая мода
появляется на частоте 0,75 Гц, учитывая форму, показанную на вставке
Рис. 5c, которая является такой же, как наблюдаемая для первой собственной частоты
в фиксированной конфигурации (Рис.4в). На рис. 5c
интересно, что скорость плавания принимает отрицательное значение
при 3 Гц, и робот плывет назад. Этот эффект может также быть результатом граничных условий, поскольку голова as-
Этот эффект может также быть результатом граничных условий, поскольку голова as-
предполагает амплитуду, превышающую амплитуду хвоста в соответствующем режиме колебаний
.
Чтобы сравнить плавание нашего робота с реальной рыбой, мы
оценили число Струхаля, определенное как
St fA
U, (15)
, где f — частота движения, A — амплитуда хвоста, а
Uis. скорость плавания.Известно, что плавание
различных видов рыб (грозообразных, субчаранжеобразных и
панцирных) соответствует числу Струхаля в конкретном диапазоне
0,25 7 Мы обнаружили, что амплитуда хвоста в в условиях привязанного плавания при 0,75 Гц должна быть 23,5 мм на по оценке из вставки на рис. 5c, в результате чего число Струхаля робота будет St = 0,47, что очень близко к уже упомянутому диапазону для реальной рыбы.Однако следует отметить, что такой диапазон St, как известно, действителен в диапазоне числа Рейнольдса Re между 10 4 и 10 6 (Re = LU / м, где Lis — характерная длина и кинематическая вязкость воды). 3 , что немного ниже диапазона , поэтому неясно, является ли полученное St действительным. Заключение и дальнейшая работа Мы представили моделирование, проектирование, изготовление и описание характеристик подводного робота типа DEA на основе мягкого биомиметика рыбьего типа , который плавает с помощью движителя BCF. Математическая модель , использованная для вычисления собственных частот конструкции , показала значения, аналогичные результатам экспериментальной повторной . Робот демонстрировал плавательные движения, похожие на настоящих рыб, что также количественно оценивалось с помощью числа Струхаля. Эти результаты позволяют предположить, что высокий потенциал подводных роботов на основе DEA основан на силовой установке BCF и возможности применения наших методов проектирования и изготовления. Наша будущая работа будет заключаться в расширении математической модели до условий плавания на привязи . не должна рассматривать голову робота как фиксированную границу, а должна представлять ее как точечную массу со свободными граничными условиями.В этой будущей модели также будут учтены эффекты жесткости от присутствия электродных слоев и окисление из-за связывания кислородной плазмой . Впоследствии мы будем работать над , характеризующим роботов в разных масштабах размера и в режимах плавания , чтобы понять, насколько применимы наша модель и метод построения . Благодарности Эта работа была поддержана Швейцарским национальным центром Competence in Research (NCCR) Robotics и швейцарским грантом Национального научного фонда 200020-153122. Заявление автора о раскрытии информации Не существует конкурирующих финансовых интересов. Ссылки 1. Триведи Д., Ран CD, Кир В.М., Уокер ID. Мягкая робототехника: биологическое вдохновение, современные достижения и будущие исследования. Appl Bionics Biomech 2008; 5: 99–117. 2. Рус Д, Толлей М.Т. Разработка, изготовление и контроль мягких роботов . Природа 2015; 521: 467–475. 3. Сузумори К. Производство эластичных материалов для роботов. Робототехника Auton Syst 1996; 18: 135–140. 4. Илиевски Ф., Маццео А.Д., Шепард Р.Ф., Чен Х, Уайтсайдс GM. Мягкая робототехника для химиков. Angew Chem Int Ed Engl 2011; 50: 1890–1895. 5. Tolley MT, et al. Устойчивый, непривязанный мягкий робот. Soft Робототехника 2014; 1: 213–223. 6. Шинтаке Дж., Россет С., Шуберт Б., Флореано Д., Ши Х. Универсальные мягкие захваты с собственной электроадгезией на основе на многофункциональных полимерных приводах.Adv Mater 2016; 28: 231–238. 8 SHINTAKE ET AL. ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1200A, 3PH, 100K, 208Y / 120 ВЕРХНИЙ / НИЖНИЙ, НАКЛЕЙКА N3R ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1200A, 3PH, 100K, 208Y / 120 ВЕРХНИЙ / НИЖНИЙ, N3R С ЭТИКЕТКОЙ С ПРОХОДНЫМИ ПРОКЛАДКАМИ ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1600A, 3PH, 100K, 208Y / 120 TOP / BOTTOM, N3R LABEL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1600A, 3PH, 100K, 208Y / 120 ВЕРХНИЙ / НИЖНИЙ, N3R С ЭТИКЕТКОЙ ПРОХОДНЫХ ПРОКЛАДКИ MMETER MOD III – 2000A ГЛАВНАЯ СЕКЦИЯ ПРОШИВКИ N3R ENCL СЧЕТЧИК МОД III – 2000A СЕКЦИЯ ГЛАВНОЙ ПРОКЛАДКИ N3R ENCL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 400A, 3PH, 100K, 208Y / 120 ВЕРХНИЙ / НИЖНИЙ, N3R ЭТИКЕТКА ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 400A, 3PH, 100K, 208Y / 120 TOP / BOTTOM, N3R, CU BUS, CON-ED LABEL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 600A, 3PH, 100K, 208Y / 120 TOP / BOTTOM, N3R LABEL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 600A, 3PH, 100K, 208Y / 120 TOP / BOTTOM, N3R, CU BUS, CON-ED LABEL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 800A, 3PH, 100K, 208Y / 120 ВЕРХ / ВНИЗ, N3R НАКЛЕЙКА ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 800A, 3PH, 100K, 208Y / 120 TOP / BOTTOM, N3R, CU BUS, CON-ED LABEL ГЛАВНЫЙ ВЫКЛЮЧАТЕЛЬ, 1000А, 3Ф, 65К, 120 / 240В, НИЖНЯЯ ПОДАЧА, ЭТИКЕТКА N3R ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1200A, 1PH, 100K, 208Y / 120 TOP / BOTTOM, N3R LABEL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 1600A, 1PH, 100K, 208Y / 120 TOP / BOTTOM, N3R LABEL СЧЕТЧИК МОД III – 2000A СЕКЦИЯ ГЛАВНОЙ ПРОШИВКИ N3R ENCL СЧЕТЧИК МОД III – 2000A СЕКЦИЯ ГЛАВНОЙ ПРОШИВКИ N3R ENCL ГЛАВНАЯ КЛЕММНАЯ КОРОБКА, 800A, 1PH, 100K, 208Y / 120 TOP / BOTTOM, N3R LABEL Авторы изучили различные автоматизированные системы, применяемые в аграрном секторе. Искусственный интеллект важен для поддержания прогресса в агропромышленном секторе. Орошение и прополка были смягчены с помощью автоматизированных роботизированных систем. Решены проблемы, связанные с мониторингом посевов и опрыскиванием. Сельское хозяйство играет важную роль в экономическом секторе. Автоматизация в сельском хозяйстве — главная проблема и новая тема во всем мире. Население стремительно растет, и вместе с этим увеличивается спрос на продукты питания и рабочие места.Традиционных методов, которые использовали фермеры, было недостаточно для выполнения этих требований. Таким образом, были внедрены новые автоматизированные методы. Эти новые методы позволили удовлетворить потребности в продуктах питания, а также предоставили возможности трудоустройства миллиардам людей. Искусственный интеллект Гербицид Пестицид Автоматизация Ирригация Рекомендуемые статьиЦитирующие статьи (0) © 2020 Авторы. Производство и хостинг Elsevier B.V. от имени KeAi Communications Co., Ltd. Описание продукта: Диэлектрические перчатки, изготовленные из специальной резины, способствуют защите рук и ладоней человека от сильного поражения электрическим током. Важно знать, что эти изделия можно использовать исключительно в электроустановках, напряжение которых не превышает 1000 В.Регулярная калибровка диэлектрических перчаток обязательна, так как от качества продукта зависит безопасность человека. Диэлектрические резиновые перчатки, используемые для защиты рук человека при проведении ремонтных или других работ в электроустановках. Основные преимущества этого защитного средства: В соответствии с правилами техники безопасности диэлектрические перчатки следует проверять каждые 6 месяцев. Испытания таких изделий на прочность проводятся в специально отведенных лабораториях, где специалисты с помощью специального оборудования проводят серию испытаний и проверок. Латексное покрытие подвергается воздействию высокого напряжения (6 кВ). Если изделие проводит через себя ток более 6 мА, — перчатки списываются и пользоваться ими запрещено, так как это опасно для жизни человека.Качественная и своевременная проверка диэлектрических перчаток крайне необходима, ведь из-за поврежденной поверхности изделия человек после проведения ремонта или любых других работ в электроустановках подвергается серьезной опасности. Испытания резиновых перчаток и других подобных продуктов — ключ к безопасности и сохранности здоровья человека. Также, проведя тест на перчатках, можно выявить брак. Всегда важно помнить, что анализы нужно проводить регулярно. Как уже было сказано, резиновые перчатки следует проверять каждые 6 месяцев.А если продукция не тестировалась более 6 месяцев, использовать ее в электроустановках категорически запрещено. Следует всегда помнить, что использование некачественных или неподходящих диэлектрических изделий при работе с установками, в которых присутствует высокое напряжение, может привести к самым негативным последствиям. Говоря простыми словами, использование таких некачественных перчаток или другой продукции — прямая угроза для жизни. Каждое диэлектрическое устройство, изделие или устройство следует регулярно проверять. Дата необходимого следующего осмотра указывается на самом изделии или в виде штампа. Соблюдение сроков всех последующих проверок диэлектрических перчаток или других изделий является главной гарантией их безопасного использования. Нормы и периодичность электрических испытаний. При работе с устройствами, имеющими прямой доступ к электрическому потоку, необходимо принять все меры предосторожности для вашей собственной безопасности. На сегодняшний день в конструкциях устройств и электроустановок уже предусмотрена современная мера защиты, направленная на безопасность работников. Но эти последние разработки не могут на 100% защитить от ударников. Поэтому существует ряд индивидуальных средств, основная задача которых — защитить человека от прямого контакта с током. Эти инструменты включают диэлектрические перчатки, роботы, бахилы и многое другое. Они изготовлены из специальной резины, обладающей высокой устойчивостью к электричеству и отличной эластичностью. Но здесь мы рассматриваем только один вид вышеперечисленных средств индивидуальной защиты — это диэлектрические перчатки. Используются в установках, в которых электрический ток не превышает 1000 (В). В составе основного вещества — качественная резина или латекс. Перчатки диэлектрические могут быть бесшовные или, наоборот, со швом, бывают пятипалые и двупалые варианты. Что касается размера перчатки, то она стандартная — 350 мм.Ширина должна быть намного больше ладони, чтобы рабочий мог носить специальную обыкновенную перчатку, это необходимо, чтобы человек не заморозил руки во время работы. Рукав перчатки следует носить строго над одеждой; Категорически запрещается заправлять или заправлять диэлектрические перчатки. Одежда рабочих не должна препятствовать надеванию перчаток. Они должны свободно лежать на руке. Перед работой с электроприборами лучше обезопасить себя, чем получить неприятные последствия. Самое первое, что нужно сделать перед тем, как надеть перчатки, — это проверить их. Итак, давайте посмотрим, что такое проверка диэлектрических перчаток. Диэлектрические перчатки проходят испытания по следующим критериям: Срок годности перчаток определяется после предварительного тестирования.Если они сдают тест, то ставят штамп, на котором должна быть указана дата следующего теста. Следует осмотреть перчатки на предмет внешних повреждений, их не должно быть. Если есть, перчатки необходимо заменить в обязательном порядке. Если есть видимые загрязнения, их следует вымыть и высушить перед использованием. В помещении, где сушат перчатки, температура должна быть комнатной. Многие проколы или трещины в глазу не видны. Чтобы определить такое повреждение, следует выполнить следующие действия: положить перчатку на ровную поверхность, а затем повернуть ее по направлению пальцев. При его повреждении из отверстий будет выходить воздух. Этот элемент защиты выполняет важную функцию, поэтому, чтобы убедиться в пригодности перчаток, проводятся специальные испытания, в ходе которых определяется их пригодность. Диэлектрические перчатки следует проверять каждые шесть месяцев. Есть специальная установка для диэлектрических перчаток и других средств индивидуальной защиты. При такой установке прилагаются перчатки. В специальную металлическую емкость (тазик) и в перчатки собирается вода.Минимальная температура воды должна быть 10 градусов, а максимальная — 40. При этом уровень воды должен быть на 50 мм ниже краев ванны. Края перчаток (по периметру) и ванна должны быть сухими. В перчатку опускается специальный электрод, после чего на этот электрод и на кожух ванной подается ток (напряжение которого должно быть 6 кВ). Обычно ток, проходящий через перчатки, не может быть ниже 6 мА. Сам тест длится недолго, около минуты. После тестирования обязательно просушите перчатки. Если диэлектрические перчатки не тестировались, их нельзя использовать. Это может быть опасно для жизни! При испытании диэлектрических перчаток ставится соответствующий штамп, на котором указывается дата следующего испытания, и делается запись в специальной чековой книжке средств индивидуальной защиты от электрического тока. И по окончании всего выдается протокол испытаний средств защиты. В протоколе указаны лаборатория, в которой проводилось испытание, исполнители самого процесса и все нюансы проведения испытания (частота тока, требования и т. Д.)). В конце подписывают заведующий лабораторией и лицо, проводившее проверку, а также дату. Самый простой способ найти нужные вещи — это интернет-магазины. Например, там можно найти диэлектрические перчатки, цена которых составит 250 рублей. Вот, например, перчатки из диэлектрического латекса могут стоить от 500 рублей и выше, если производитель Швейцария. Если перчатки дороже, то это еще ничего не говорит о качестве, можно также приобрести малобюджетные, которые могут гарантировать высокую токовую защиту. Перед покупкой следует ознакомиться со всеми критериями выбора перчаток и проконсультироваться у опытного продавца. Работа в электросетях невозможна без средств защиты.Руки подвержены, в первую очередь, опасному воздействию электричества при выполнении определенных работ в электрических сетях и с электрооборудованием. Поэтому диэлектрические перчатки обязательно присутствуют в списке средств индивидуальной защиты. Их называют дополнительными средствами, если мы говорим о напряжениях выше 1 кВ и базовыми средствами защиты при напряжениях ниже 1 кВ. Но при выполнении работ в электроустановках перчатки также используются для защиты от травм рук, в том числе не зависящих от напряжения. Помимо штампа, необходимо указать соответствие либо «EV», либо «EN», которые обозначают свойства электрозащиты всех накладных средств.Перчатки необходимы для использования во всех случаях работы с напряжением более 1 кВ, связанных с использованием индикаторов напряжения, ручных инструментов, таких как щипцы, изолирующие стержни. Например, для ношения перчаток требуется: Прикасаться измерителем напряжения к токоведущим частям напряжением более 1 кВ разрешается только в изношенных диэлектрических перчатках. Исключение составляет однополюсный индикатор напряжения, в котором необходим контакт с рукой, держащей его, через специальный электрод, расположенный сбоку на корпусе индикатора напряжения. При ремонте кабеля, в частности, при необходимости его проткнуть, перед проколом необходимо надеть перчатки. Они могут быть как с двумя свободными пальцами, так и с пятью пальцами. Материал защитных перчаток — диэлектрическая резина. Их изготавливают длиной не менее 35 см либо методом бесшовного литья, либо путем прессования двух деталей с последующим их соединением сварным швом. Размер их внутренней части должен позволять надевать дополнительные утепленные перчатки при выполнении определенных операций в холодную погоду. А верхнюю одежду с манжетами следует класть под перчатку. Недопустимо использовать их без маркировки «En» или «Ev». Периодически в соответствии с установленным планом диэлектрические перчатки следует испытывать на соответствие защитным свойствам. Уровень воды в перчатке и в ванной должен быть одинаковым, а выступающие над водой края в ванной должны оставаться сухими. Между корпусом ванны и специальным электродом, погруженным в перчатку, создается испытательное напряжение 6000 В, действующее в течение 1 минуты.Стенд сделан так, что можно измерить ток электродов каждой отдельной перчатки: Если во время испытания материал перчатки сломан или ток испытательных электродов превышает 6 миллиампер, перчатка помечается как дефектная. По окончании испытания кондиционирующие защитные перчатки готовятся к использованию с обязательной сушкой. При использовании их между испытаниями, прежде чем надевать, их необходимо визуально проверить на целостность и отсутствие повреждений. Если предстоящие работы связаны с вероятностью пореза или прокола материала, поверх них надеваются дополнительные защитные перчатки или перчатки из брезента или кожи. Поскольку со временем резина загрязняется, а ее защитные свойства из-за этого ухудшаются, необходимо смыть загрязнения водой с содой или мылом, а затем тщательно высушить. При их хранении необходимо исключить нагревание отопительных приборов, а также попадание солнечных лучей.Не должно быть ряда инструментов, предметов или веществ, которые могут повредить материал перчаток в результате случайного воздействия. Они всегда должны оставаться сухими. Осторожное и бережное обращение с этими важными продуктами для безопасной работы является жизненно важной необходимостью. Здравствуйте! Работа с электричеством всегда сопряжена с опасностью и возможностью навредить себе. С первых этапов разработки электроприборов большое внимание уделялось вопросам безопасности. Было создано огромное количество средств защиты персонала от травм. Чаще всего рабочие используют перчатки, специальную обувь и одежду. Кроме того, практикуется использование ковриков и других изделий, способных защитить персонал от поражения электрическим током. Обычно эти средства изготавливаются из специальной резины, которая помогает сохранить прочность и эластичность. Однако этот материал подвержен влиянию температуры, света и различных химических соединений, поэтому через некоторое время каучук теряет свои свойства. Одно из самых эффективных средств защиты персонала от электрического тока — диэлектрические перчатки. Резина, из которой они сделаны, обладает высокой эластичностью. Такие перчатки делятся на две категории. Первый защищает от напряжений, не превышающих 1000 вольт, и является основным защитным средством. Второй, соответственно, защищает от напряжения, которое выше этого показателя, и считается дополнительным средством защиты.Они различаются толщиной стенок. Латексные диэлектрические перчатки не имеют шва и изготавливаются исключительно из натуральных материалов. Резина, в свою очередь, имеет шов, но намного дешевле латексных аналогов. Рассматривая более подробно вопрос о материалах для изготовления перчаток, следует определить, какими преимуществами обладают те или иные виды сырья. Таким образом, удастся подобрать средство, подходящее для того или иного вида работ. В любом случае у специалиста должно быть несколько пар перчаток. Латекс считается одним из лучших диэлектрических материалов. Он выдерживает напряжение до 7500 вольт, но этот показатель часто зависит от производителя. Бесшовные перчатки чрезвычайно устойчивы к агрессивной среде. Например, они позволяют работать с кислотами. К тому же такие перчатки не деформируются при низких температурах. Покупка перчаток — необходимая мера для людей, работающих с электричеством. Поэтому работать нужно только с проверенными производителями, чтобы избежать покупки некачественного товара. Использование диэлектрических перчаток связано с определенными правилами, нарушение которых может привести к неэффективности их защитных свойств. Чтобы безопасно использовать этот инструмент безопасности, вы должны следовать простым принципам: Перчатки с истекшим сроком годности использовать нельзя. Каждый раз перед работой их необходимо проверять на наличие влаги и повреждений.Только убедившись, что перчатки чистые и сухие, их можно использовать. Немаловажную роль играет герметичность устройства. Перчатки наполнены воздухом, и если они не пропускают его, их можно использовать в работе. В противном случае они могут не защитить персонал от тока. Диэлектрические манжеты для перчаток следует надевать поверх рукавов одежды.Ни в коем случае нельзя переворачивать их вверх ногами, а длина перчаток должна превышать 35 сантиметров. При низких температурах можно использовать теплые перчатки под диэлектриком, чтобы защитить кожу от холода. Для дезинфекции перчатки периодически погружают в раствор, в состав которого входит сода или мыло. После этого их необходимо просушить. Не реже одного раза в полгода перчатки проверяются в специальной лаборатории, чтобы убедиться, что резина не потеряла своих свойств. Конечно, диэлектрические перчатки необходимо не только правильно использовать, но и хранить в соответствии с инструкциями. Это увеличит их продолжительность жизни. Кроме того, правильное хранение — необходимая мера безопасности, о которой нельзя забывать при работе с током. Помещение, в котором хранятся перчатки, должно быть сухим и хорошо вентилируемым. Температура не должна превышать 25 ° C, но не должна быть ниже нуля. Влажность тоже имеет значение. Оно не должно быть больше 75%. Ни в коем случае нельзя допускать прямого контакта перчаток с солнечными лучами. Перчатки следует хранить на расстоянии более 1 метра от нагревательных приборов, всех видов масел, кислот и щелочей. Эти вещества могут повредить материал, из которого сделаны перчатки. Испытание перчаток, которое проводится каждые шесть месяцев, как обсуждалось выше, также имеет первостепенное значение.Перчатки отправляются в лабораторию, где проверяются на соответствие всем нормам и нормам безопасности. Для тестирования необходимо наполнить сосуд из металла водой. Температура воды должна соответствовать температуре в помещении. Перчатки опускают в посуду пальцами, пока они наливаются водой. Далее в перчатках есть специальное устройство с напряжением. Эта проверка занимает 60 секунд. Электроды с напряжением помещаются непосредственно в перчатку.В случае возгорания лампочки можно судить, что диэлектрическая перчатка потеряла свои свойства. В противном случае проводится вторая проверка. С помощью специального амперметра измеряется ток. Если он не превышает 6 мА, перчатки можно использовать в дальнейшем в связи с их безопасностью. В случае превышения этого показателя перчатки считаются непригодными. После этого диагноза перчатки необходимо просушить. Заполняются необходимые документы об исследовании и к перчаткам прилагается дата следующего осмотра. При работе с электрическими приборами первое, о чем должен думать мастер, — это собственная безопасность. Изделия из диэлектрических материалов — лучшее, что пришло в эту отрасль сегодня. Преимущества диэлектрических перчаток в том, что они доступны и доказывают свою эффективность на протяжении многих лет. Диэлектрические перчатки предназначены для защиты рук от повреждений. поражение электрическим током. При работе в электроустановках напряжением до 1000 В перчатки используются как основное электрозащитное средство, а в электроустановках выше 1000 В — как дополнительное. В электроустановках допускается использование бесшовных латексных перчаток (по ГОСТ 12.4.183-91 и ТУ 38.306-5-63-97) или перчаток со швом из листовой резины, выполненных штамповкой (по ТУ 38305-05). -257-89).Длина диэлектрических перчаток должна быть не менее 350 мм. Размер перчаток должен позволять носить шерстяные или хлопчатобумажные перчатки для защиты рук от холода при обслуживании открытых устройств в холодную погоду. Правила использования диэлектрических перчаток Запрещается использовать перчатки с истекшим сроком годности. Перед использованием перчаток убедитесь, что они не мокрые и не повреждены.Проверьте перчатки на предмет проколов, повернув их в направлении пальцев. При работе в диэлектрических перчатках нельзя переворачивать края. Для защиты от механических повреждений поверх перчаток можно надевать кожаные или парусиновые перчатки или варежки. Используемые перчатки необходимо периодически (в зависимости от местных условий) дезинфицировать содовой или мыльной водой. По личному опыту предпочитаю бесшовные перчатки. Я использовала перчатки со швом, но то ли качества, то ли это была особенность всех перчаток со швом, но они расстилались прямо на руках, а не только по швам. Испытание диэлектрических перчаток Диэлектрические перчатки необходимо проверять каждые 6 месяцев. При испытании диэлектрические перчатки погружают в металлический сосуд с водой. Температура воды 25 ± 10 ° С, в перчатку наливают воду. Уровень воды внутри и снаружи изделия должен быть на 50 мм ниже верхнего края перчаток. Выступающие края перчаток должны быть сухими. Один выход испытательного трансформатора подключен к емкости, другой — заземлен. Внутри перчаток опускаем электрод, который через миллиамперметр соединен с массой. Одна из возможных схем испытательного стенда. Рис. Принципиальная схема испытаний диэлектрических перчаток, ботинок и калош: При испытании переключатель сначала устанавливают в положение А, чтобы определить отсутствие или наличие пробоя по сигнальным лампам. При отсутствии поломки переключатель устанавливается в положение B для измерения тока, проходящего через перчатку.Диэлектрическую перчатку отвергают, если ток, проходящий через нее, превышает норму или есть резкие колебания стрелки миллиамперметра. В этой статье представлен обзор литературы, документирующий эволюцию континуальных роботов за последние два десятилетия (с 1999 г. по настоящее время). Биоинспирированным мягким роботам уделяется внимание по следующим трем параметрам конструкции: конструкция, материалы и срабатывание.Используя эту трехгранную призму, мы идентифицируем уникальность и новизну роботов, которые до сих пор не были раскрыты публично. Мотивация для этого исследования исходит из того факта, что мягкие роботы континуума могут проникнуть в промышленное производство, и их внедрение будет ускорено, если будут очевидны их ключевые преимущества перед аналогами с жесткими связями. В это исследование включены четыре различных таксономии роботов континуума, что позволяет исследователям быстро определять роботов, имеющих отношение к их исследованиям.Кинематика и динамика этих роботов не рассматриваются, а также их применение в хирургических манипуляциях. В обрабатывающей промышленности роботы неуклонно приобретают все большее значение в операциях на сборочных линиях из-за их убедительного ценностного предложения: сокращение времени цикла и повышение точности, а также набор навыков [1]. Типичный промышленный робот устанавливается на полу для обеспечения безопасности и состоит из дискретных жестких звеньев, которые приводятся в действие для грубого перемещения концевого эффектора и соответствующего задачи концевого эффектора с точным управлением двигателем.Сложное программное обеспечение управления управляет отдельными роботами или координирует работу нескольких роботов, чтобы максимизировать их ценность в конкретной промышленной операции [2]. На этом фоне континуальные роботы становятся новой концепцией, по крайней мере, в исследованиях, с потенциалом для использования в широком спектре промышленных приложений [3]. Континуальные роботы — это сверхгибкие электромеханические конструкции с бесконечными степенями свободы, которые дают им возможность маневрировать по сложным криволинейным траекториям (обзор манипуляторов континуума [4]). Роботы Continuum обладают повышенной гибкостью и, следовательно, маневренностью по сравнению с их аналогами с жесткой связью (важность роботов с континуумом [7]). Рисунок 1 из [8] иллюстрирует существенное различие между дискретной, змеевидной и непрерывно-связной структурой. Из этого рисунка видно, что структуры континуума имеют больше степеней свободы для перемещения, и, таким образом, они могут двигаться более точно по форме объекта. Кроме того, их концы могут располагаться во многих других направлениях трехмерной ориентации по сравнению с конструкциями с жесткими звеньями. Когда дело доходит до непрерывно приводимых в действие структур, биологические системы от природы (рис. 1) обладают некоторыми неотразимыми характеристиками, которые стоит подражать: симметричный и оптимизированный дизайн, уникальность с учетом эволюции для решения поставленной задачи и, наконец, энергоэффективная кинематика. и динамика на выживаемость (обзор биоинспирации [13]).Когда дело доходит до конструирования своих роботов континуума, исследователей вдохновляют царства животных и растений, и в таблице 1 представлена наша первая таксономия, а именно, биоинфекция, лежащая в основе различных роботов, рассмотренных здесь: наш обзор включает в себя многочисленные ссылки на публикации исследовательской группы Уокера — они таковы. не только один из первых, кто исследовал биологические структуры для роботов континуума, начиная со слоновьего хобота [27], но они также заняли самый большой след среди всех исследовательских групп, левый столбец Таблицы 1 [14–31]. Непрерывно сочлененные структуры в биологическом царстве состоят из мышц, сухожилий, волокон и суставов. В этом разделе обсуждаются таксономия и эволюция, а также используемые материалы разработки континуальных роботов, вдохновленные биоструктурами. Структура континуального робота, используемого для манипулирования, широко классифицируется на односегментного или многосегментного робота на ранних этапах исследований [186]. Для повышения функциональности в качестве основы для этих роботов вводятся несколько дисков, чтобы имитировать непрерывную структуру, примеры которой показаны в таблице 2.Каждый разработанный континуальный робот попадает в категорию биовдохновения, упомянутую в таблице 1, а описание в таблице 2 дает краткое описание разработанных моделей. На ранних этапах исследований [14–20], известных как континуальные роботы первого поколения, модели хоботов слона [187] были состоит максимум из трех сегментов с пневматическим приводом. Модели континуума, вдохновленные позвоночником млекопитающего [32–55] и змеи [56–71], являются наиболее распространенными примерами многодисковых биомоделей с одним или несколькими сегментами, которые состоят из структурированного ряда дисков, как показано на рисунке 3 (а). Структуры позвоночника могут обладать только изгибающими движениями с ограниченными угловыми ограничениями и с фиксированным основанием, а змеи относятся к классу рептилий, которые обладают способностью вытягивать свое тело без конечностей, чтобы захватывать или манипулировать объектами с точностью в ограниченном пространстве.Односегментные мультидисковые модели, позвоночник [32–42] и змея [56–62], как правило, состоят из круглых металлических конструкций, равноудаленных вдоль позвоночника. Модели, похожие на осьминоги и щупальца [84–131], в основном односегментированные. Осьминог — это класс головоногих моллюсков, чья структура симметрична по оси, разделяющей два его глаза пополам, тогда как щупальце — это удлиненно-вытянутый орган (пример робота, вдохновленного щупальцами [121]), присутствующий у многих беспозвоночных, который обычно встречается парами. Человеческая рука — самая сложная биомодель, и исследователи разработали модели, которые повышают безопасность манипуляций с физическим взаимодействием с человеком.Все такие конструкции роботов можно разделить на две модели: многозубые ручные роботы (рисунок 5) и многосуставные выдвижные руки (таблица 3). Все многозубые ручные роботы [132–146] были разработаны, чтобы иметь аналогичную конструкцию, с металлическим или пластиковым основанием и пальцами, сделанными из упрочненного полиамидного материала. Роботы с человеческими руками [147–159, 189] спроектированы с несколькими соединениями и уникальным концевым эффектором и классифицируются в зависимости от области применения, как показано в таблице 3. Все биомодели, обсуждаемые в предыдущих разделах, являются роботами, вдохновленными животными. Последняя категоризация роботов континуума — это структура, вдохновленная хвостом и языком хамелеона животного. Робот, вдохновленный языком хамелеона (рис. 7 (b)) [183], состоит из механизма, который может выполнять принцип накопления и высвобождения упругой энергии, которая может увеличиваться до 1.В 5 раз больше длины его тела и может проявлять силу 500 м / с 2 . Хвост (рис. 7 (а)) [182] на конструкциях имеет очень мало инженерных приложений, которые предполагается использовать на борту мобильного робота для обеспечения средств, отдельных от механизма передвижения (например, ног или колес), для создания внешних силы и моменты для стабилизации и / или маневрирования робота. Материал, который выбирают для биоинспирированных континуальных роботов — полиамид — полимеризованная молекулярная цепочка, сделанная из смеси нейлоновой оплетки или углеродного амальгамирования (например.g., бура и виниловый спирт), прочность, эластичность и гибкость которых можно изменять в зависимости от области применения. Другими материалами, используемыми при создании континуальных роботов, являются силикон, нитинол, алюминий, плетеные ткани и сплавы с памятью формы. В таблицах 4 и 5 представлена систематика различных материалов, используемых при конструировании роботов континуума. Силовой привод относится к компоненту непрерывного робота, который приводит в движение его физическое движение. Наиболее распространенными исполнительными механизмами, используемыми в роботах с континуумом, являются пневматические или электрические двигатели. Другие приводы, такие как гидравлические, витые полимерные, тепловые или магнитные, хотя и не так распространены, они также используются в меньшем количестве приложений. Пневматические приводы [46, 190–220] являются наиболее часто используемым типом в роботах непрерывного действия, поскольку они менее сложны и дешевы.Привод создается за счет принудительного нагнетания или отвода воздуха из тела континуальной конструкции (таблица 6). Они были впервые разработаны под названием приводов McKibben, расположенных симметрично вдоль центральной оси тела робота с гибкими парами на противоположных сторонах, находящимися под давлением с помощью одного соленоидного клапана, который регулирует объем и направление воздушного потока с помощью датчика давления. Манипуляторы сплошной среды с приводом от сухожилий — первые конструкции, разработанные с гибкими сегментами регулируемой длины. Эти структуры помогают телу образовывать кривые с переменным радиусом кривизны, что увеличивает эффективность захвата. Исследователи изучили свойства щупальцевидных роботов из континуума и попарно расположили сухожилия, приводимые в действие двигателями.Почти каждая конструкция со встроенной арматурой приводится в действие электродвигателями (постоянного тока, сервоприводами или шаговыми двигателями) (Таблица 7). У нашего робота Re 5,6 · 10
У нашего робота Re 5,6 · 10 В частности, модель
В частности, модель
Публикационная библиотека | АББ США
Дата: 02.  10.2017
10.2017 Размер: 576,92 КБ Номер публикации: TMP3L12R-LBL Дата: 02.10.2017 Размер: 167.32 КБ Номер публикации: TMP3L12RCRIS-LBL Дата: 02.10.2017 Размер: 485,42 КБ Номер публикации: TMP3L16R-LBL Дата: 02.  10.2017
10.2017 Размер: 167.35 КБ Номер публикации: TMP3L16RCRIS-LBL
100KAIC 3Ph5W 120 / 240V ЭТИКЕТКА ВЕРХНЕГО / БОТА FED Дата: 02.10.2017 Размер: 498,41 КБ Номер публикации: TMP3L20R-LBL
100KAIC 3Ph5W 208Y / 120V ВЕРХНИЙ / ЗАДНИЙ ПОДАЧА С ПРОПУСКАНИЯМИ ПОДАЧИ ЭТИКЕТКА Дата: 02.10.2017 Размер: 502.29 КБ Номер публикации: TMP3L20RCRIS-LBL Дата: 02. 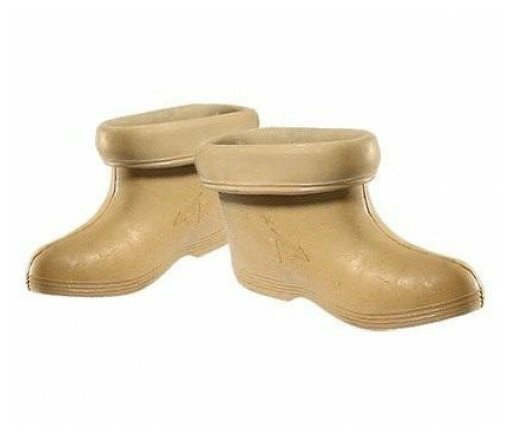 10.2017
10.2017 Размер: 206,53 КБ Номер публикации: TMP3L4R-LBL Дата: 02.10.2017 Размер: 206.53 КБ Номер публикации: TMP3L4RCU-LBL Дата: 02.10.2017 Размер: 558,65 КБ Номер публикации: TMP3L6R-LBL Дата: 02.  10.2017
10.2017 Размер: 558.65 КБ Номер публикации: TMP3L6RCU-LBL Дата: 02.10.2017 Размер: 205,09 КБ Номер публикации: TMP3L8R-LBL Дата: 02.10.2017 Размер: 205.09 КБ Номер публикации: TMP3L8RCU-LBL Дата: 02.  10.2017
10.2017 Размер: 68,65 КБ Номер публикации: TMP3SB10R-LBL Дата: 02.10.2017 Размер: 557.07 КБ Номер публикации: TMPL12R-LBL Дата: 02.10.2017 Размер: 481.06 КБ Номер публикации: TMPL16R-LBL
100KAIC 1Ph4W 120 / 240V ЭТИКЕТКА ВЕРХНЕГО / НИЖНЕГО УРОВНЯ Дата: 02.  10.2017
10.2017 Размер: 472.97 КБ Номер публикации: TMPL20R-LBL
100KAIC 1Ph4W 120 / 240V ВЕРХНЯЯ / BOT FED W / FEED THRU LUGS Этикетка Дата: 02.10.2017 Размер: 476,75 КБ Номер публикации: TMPL20RCRIS-LBL Дата: 02.10.2017 Размер: 155.67 КБ Номер публикации: TMPL8R-LBL Внедрение искусственного интеллекта в сельском хозяйстве для оптимизации орошения и применения пестицидов и гербицидов
https://doi. org/10.1016/j.aiia.2020.04.002Получить права и контент
org/10.1016/j.aiia.2020.04.002Получить права и контент Основные моменты
Реферат
 Искусственный интеллект в сельском хозяйстве произвел революцию в сельском хозяйстве. Эта технология защитила урожай от различных факторов, таких как климатические изменения, рост населения, проблемы с занятостью и проблемы с продовольственной безопасностью.Основная задача данной статьи — провести аудит различных применений искусственного интеллекта в сельском хозяйстве, таких как орошение, прополка, опрыскивание, с помощью датчиков и других средств, встроенных в роботов и дроны. Эти технологии экономят чрезмерное использование воды, пестицидов, гербицидов, поддерживают плодородие почвы, а также помогают в эффективном использовании рабочей силы, повышают продуктивность и улучшают качество. В этой статье дается обзор работы многих исследователей, чтобы получить краткий обзор текущего внедрения автоматизации в сельском хозяйстве, систем прополки с помощью роботов и дронов.Обсуждаются различные методы определения влажности почвы, а также два автоматизированных метода прополки. Обсуждается реализация дронов, а также обсуждаются различные методы, используемые дронами для опрыскивания и мониторинга урожая.
Искусственный интеллект в сельском хозяйстве произвел революцию в сельском хозяйстве. Эта технология защитила урожай от различных факторов, таких как климатические изменения, рост населения, проблемы с занятостью и проблемы с продовольственной безопасностью.Основная задача данной статьи — провести аудит различных применений искусственного интеллекта в сельском хозяйстве, таких как орошение, прополка, опрыскивание, с помощью датчиков и других средств, встроенных в роботов и дроны. Эти технологии экономят чрезмерное использование воды, пестицидов, гербицидов, поддерживают плодородие почвы, а также помогают в эффективном использовании рабочей силы, повышают продуктивность и улучшают качество. В этой статье дается обзор работы многих исследователей, чтобы получить краткий обзор текущего внедрения автоматизации в сельском хозяйстве, систем прополки с помощью роботов и дронов.Обсуждаются различные методы определения влажности почвы, а также два автоматизированных метода прополки. Обсуждается реализация дронов, а также обсуждаются различные методы, используемые дронами для опрыскивания и мониторинга урожая.
Ключевые слова
Рекомендуемые статьи
Ссылки на статьи
Пожизненные диэлектрические перчатки и бот. Диэлектрические перчатки: требования ГОСТ
Из чего сделаны перчатки и где они используются
 Каждый товар должен иметь специальную маркировку.
Каждый товар должен иметь специальную маркировку. Как проверить продукцию

Наконец
Именно поэтому перед началом работы с электроустановкой следует проверить перчатки или другую защитную одежду и посмотреть на проставленный там штамп.

Характеристика
Использование диэлектрических перчаток

Проверка перед использованием
Диэлектрические перчатки должны быть чистыми и на поверхности не должно быть влаги, это недопустимо!
Испытание диэлектрических перчаток

Результат теста
Перчатки диэлектрические. Цена
Ценовая политика другая. Все зависит от таких критериев, как материал для изготовления, производитель, внешний вид. В принципе цены колеблются от 250 до 500. Все зависит от спроса и вышеперечисленных критериев.
В принципе цены колеблются от 250 до 500. Все зависит от спроса и вышеперечисленных критериев. Возможности приложения
 Во избежание несчастного случая при использовании таких перчаток используется специальная маркировка несмываемой краской. Он имеет вид штампа с датой, позволяющий определить срок использования до проведения новых испытаний, которые следует проводить каждые шесть месяцев. Если вы не соответствуете требованиям к диэлектрическим перчаткам, штамп обязательно перечеркнут несмываемой красной краской.
Во избежание несчастного случая при использовании таких перчаток используется специальная маркировка несмываемой краской. Он имеет вид штампа с датой, позволяющий определить срок использования до проведения новых испытаний, которые следует проводить каждые шесть месяцев. Если вы не соответствуете требованиям к диэлектрическим перчаткам, штамп обязательно перечеркнут несмываемой красной краской.
Как проверяются диэлектрические перчатки?
 Для получения наиболее эффективных результатов испытаний, позволяющих учесть наличие мелких повреждений, в воде создается испытательное напряжение. Воду наливают внутрь перчаток на 4,5-5,5 см ниже их сухих краев. Испытательный пар погружают в ванну с водой, температура которой находится в диапазоне от 10 до 40 градусов Цельсия.
Для получения наиболее эффективных результатов испытаний, позволяющих учесть наличие мелких повреждений, в воде создается испытательное напряжение. Воду наливают внутрь перчаток на 4,5-5,5 см ниже их сухих краев. Испытательный пар погружают в ванну с водой, температура которой находится в диапазоне от 10 до 40 градусов Цельсия.
 Ведь случаев поражения электрическим током очень много, не говоря уже о смертельных исходах. Наиболее эффективными считаются индивидуальные защитные устройства из диэлектрических материалов.
Ведь случаев поражения электрическим током очень много, не говоря уже о смертельных исходах. Наиболее эффективными считаются индивидуальные защитные устройства из диэлектрических материалов. 

 Чтобы перчатки не повредились, поверх них надевают другие перчатки из брезента или кожи.
Чтобы перчатки не повредились, поверх них надевают другие перчатки из брезента или кожи.  Для перчаток существуют следующие условия хранения:
Для перчаток существуют следующие условия хранения: 
 Используя перчатки в соответствии с правилами, вы можете добиться максимального уровня защиты. А правильное их хранение и своевременная диагностика сделают их эксплуатацию долгой и максимально безопасной.Об этом стоит помнить всем, кто использует или собирается использовать диэлектрические перчатки.
Используя перчатки в соответствии с правилами, вы можете добиться максимального уровня защиты. А правильное их хранение и своевременная диагностика сделают их эксплуатацию долгой и максимально безопасной.Об этом стоит помнить всем, кто использует или собирается использовать диэлектрические перчатки.  Ширина нижнего края перчаток должна позволять растягиваться на рукавах верхней одежды. Перчатки могут быть пятипалыми или двупалыми.
Ширина нижнего края перчаток должна позволять растягиваться на рукавах верхней одежды. Перчатки могут быть пятипалыми или двупалыми. высокое напряжение 6 кВ на 1 минуту. Ток через перчатку во время тестирования не должен превышать 6 мА.
высокое напряжение 6 кВ на 1 минуту. Ток через перчатку во время тестирования не должен превышать 6 мА. В случае поломки отключите неисправное изделие или всю установку. По окончании теста изделия сушат.
В случае поломки отключите неисправное изделие или всю установку. По окончании теста изделия сушат. Континуальные роботы для манипуляций: обзор

1. Введение
1.1. Почему роботы Continuum?
 Ключевым преимуществом роботов с континуумом перед роботами с жесткими связями является то, что из-за их значительно меньшего веса при той же максимальной выходной силе их можно монтировать на потолке, а не на полу. Это преимущество значительно повышает их безопасность при совместном использовании с людьми в производственных цехах [5]. С другой стороны, континуальные роботы по своей природе более нелинейны и, следовательно, их сложнее контролировать, чем их дискретные аналоги с жесткой связью, что создает препятствие для внедрения в отрасли [6].
Ключевым преимуществом роботов с континуумом перед роботами с жесткими связями является то, что из-за их значительно меньшего веса при той же максимальной выходной силе их можно монтировать на потолке, а не на полу. Это преимущество значительно повышает их безопасность при совместном использовании с людьми в производственных цехах [5]. С другой стороны, континуальные роботы по своей природе более нелинейны и, следовательно, их сложнее контролировать, чем их дискретные аналоги с жесткой связью, что создает препятствие для внедрения в отрасли [6]. Исследователи разрабатывают роботов континуума для различных целей навигации [9] и разведки [10], производства и сборки [11], а также для медицинских и хирургических приложений [12].
Исследователи разрабатывают роботов континуума для различных целей навигации [9] и разведки [10], производства и сборки [11], а также для медицинских и хирургических приложений [12].
1.2. Bioinspired Robots

Биоинспирация Ссылка Модель Робот Continuum (пример) Позвоночник млекопитающего [32–55] Змея [56–71] Осьминог рука [72–83] Рука и палец человека [132–159] Биологическая виноградная лоза и растение [160–181] Язык и хвост рептилии [182, 183] 1.3. Исследовательская организация
 Одна из трех основных тем данной статьи — обзор и систематизация роботов континуума с точки зрения их механической структуры (раздел 2). Влияние биологического царства на роботов континуума настолько велико, что подавляющее большинство роботов континуума сделано из мягких материалов, которые позволяют этим роботам иметь необходимую гибкость. Второе направление этой статьи — обзор и систематизация континуальных (мягких) роботов с точки зрения материалов (раздел 2).В непрерывной робототехнике используются гидравлические, пневматические и электрические приводы. Наша последняя таксономия континуальных роботов основана на обзоре типов приводов, используемых для их движения (Раздел 4). Документ завершается некоторыми общими замечаниями относительно обследованных роботов и некоторыми наблюдениями о том, в каком направлении развивается эта область (Раздел 5). Здесь процитировано более двухсот ссылок, а подробные сведения о цитировании приведены в конце этой статьи (Ссылки). Мы повторяем, что кинематика и динамика этих роботов, включая датчики и средства управления, а также их применение в различных хирургических приложениях выходят за рамки данной статьи.
Одна из трех основных тем данной статьи — обзор и систематизация роботов континуума с точки зрения их механической структуры (раздел 2). Влияние биологического царства на роботов континуума настолько велико, что подавляющее большинство роботов континуума сделано из мягких материалов, которые позволяют этим роботам иметь необходимую гибкость. Второе направление этой статьи — обзор и систематизация континуальных (мягких) роботов с точки зрения материалов (раздел 2).В непрерывной робототехнике используются гидравлические, пневматические и электрические приводы. Наша последняя таксономия континуальных роботов основана на обзоре типов приводов, используемых для их движения (Раздел 4). Документ завершается некоторыми общими замечаниями относительно обследованных роботов и некоторыми наблюдениями о том, в каком направлении развивается эта область (Раздел 5). Здесь процитировано более двухсот ссылок, а подробные сведения о цитировании приведены в конце этой статьи (Ссылки). Мы повторяем, что кинематика и динамика этих роботов, включая датчики и средства управления, а также их применение в различных хирургических приложениях выходят за рамки данной статьи. По этим темам мы сошлемся на следующие отличные обзоры: [12, 184, 185].
По этим темам мы сошлемся на следующие отличные обзоры: [12, 184, 185]. 2. Структура и материал
2.1. Структура
Структура робота Описание Приложение Преимущество Ссылки (примеры) 
Очистка Простая конструкция Слон: [15] Рука человека: [156] Осьминог: [76] Виноградная лоза: [179] body состоит из нескольких сегментов, каждый из которых может двигаться как единая структура, но не зависит от других элементов. Осмотр Подключенное управление Слон: [14] Человеческая рука: [51] Виноградная лоза: [173] Язык и хвост: [183] Односегментный мультидиск Корпус робота состоит из нескольких дисков одного или разных радиусов, расположенных на одинаковом расстоянии друг от друга, а также каркасной конструкции, которая представляет собой единый сегмент. Медицинская хирургия Маневренность Слон: [28] Позвоночник млекопитающих: [35] Змея: [32] Щупальце: [87] Щупальце: [87] [182] Vine: [166] Многосегментный многодисковый Корпус робота состоит из нескольких дисков одинакового или различных радиусов, расположенных на одинаковом расстоянии друг от друга, а также каркасной конструкции, которая имеет несколько сегментов. 
Мобильность Многоцелевой Слон: [24] Позвоночник млекопитающих: [42] Змея: [63] Щупальце: [91] Виноградная лоза: [180] Непрерывная структура Корпус робота состоит из нескольких волокон, сплетенных вместе. Концы волокна подключаются к кабелям, которые можно отдельно наматывать вверх / вниз со шкива. Манипуляции Гибкость Змея: [68] Осьминог: [72] Щупальце: [90] Биологическая виноградная лоза: [161] Человеческая рука ] Завод: [181] 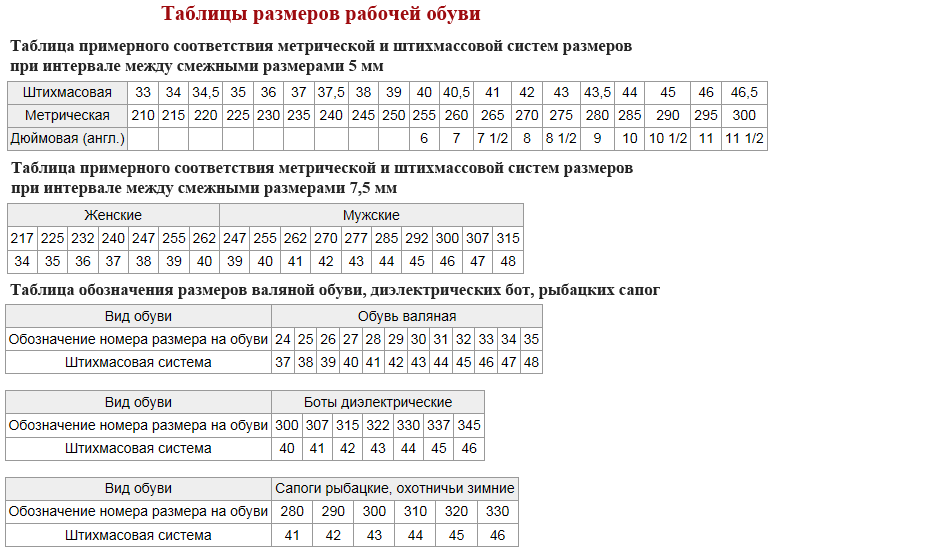 Джонс и Уокер вместе с исследователями из Университета Клемсона разработали двух роботов, OctArm [14] и Air-Octor [16], с одним сегментом, имитирующим ствол (рис. 2 (а)). Мягкий захват, выполненный в форме конуса [18], является примером односегментного робота. Мягкий манипулятор [17] разделен пополам, а зернистые роботы [20] являются дополнительными моделями с двойными и тройными сегментами (рисунок 2 (b)). В качестве прогресса исследования роботов второго поколения включают стволы с хребтом и несколькими дисками с повышенной сложностью приведения в действие и манипуляции.Эти стволы состоят из множества сегментов с двойным срабатыванием, т. Е. Электродвигательного и пневматического [21–28]. В текущем исследовательском сценарии континуальный робот третьего поколения, известный как модель бионического помощника по манипулированию (BHA), разработанный Festo [29–31], вошел в производственную среду. Это усовершенствованный прототип, созданный с использованием концепции облегченной конструкции и обладающий способностью работать с повышенной гибкостью.
Джонс и Уокер вместе с исследователями из Университета Клемсона разработали двух роботов, OctArm [14] и Air-Octor [16], с одним сегментом, имитирующим ствол (рис. 2 (а)). Мягкий захват, выполненный в форме конуса [18], является примером односегментного робота. Мягкий манипулятор [17] разделен пополам, а зернистые роботы [20] являются дополнительными моделями с двойными и тройными сегментами (рисунок 2 (b)). В качестве прогресса исследования роботов второго поколения включают стволы с хребтом и несколькими дисками с повышенной сложностью приведения в действие и манипуляции.Эти стволы состоят из множества сегментов с двойным срабатыванием, т. Е. Электродвигательного и пневматического [21–28]. В текущем исследовательском сценарии континуальный робот третьего поколения, известный как модель бионического помощника по манипулированию (BHA), разработанный Festo [29–31], вошел в производственную среду. Это усовершенствованный прототип, созданный с использованием концепции облегченной конструкции и обладающий способностью работать с повышенной гибкостью. Эта модель состоит из трех сегментов переменной кривизны, поддерживаемых сухожилиями, и весом 1.8 кг. Структура и компоненты КНБК показаны на Рисунке 2 (c) вместе с концевыми эффекторами с тремя пальцами для захвата объектов.
Эта модель состоит из трех сегментов переменной кривизны, поддерживаемых сухожилиями, и весом 1.8 кг. Структура и компоненты КНБК показаны на Рисунке 2 (c) вместе с концевыми эффекторами с тремя пальцами для захвата объектов. Диски имеют магнитную поляризацию, поэтому расстояние между дисками остается постоянным и может принимать форму постоянной кривизны для достижения полусферической поверхности концевого эффектора. Эти диски изготовлены из стали или твердого полиамида. Многосегментные модели позвоночника [43–55] выровнены с металлическими межпозвоночными дисками, выровненными на постоянном расстоянии, что обеспечивает нелинейные характеристики демпфирования, а змея [63–67] построена с цилиндрическими трубками, соединенными суставами с вращательной и поступательной степенями свободы. и в основном используется для проверки сквозных отверстий, как показано на Рисунке 3 (b).Чтобы достичь модели континуальной структуры, разработаны модели змей [68–71], которые состоят из плетеных материалов или материалов из сплава с памятью формы и имеют двойное срабатывание, т. Е. Имеют трос или пневматический привод.
Диски имеют магнитную поляризацию, поэтому расстояние между дисками остается постоянным и может принимать форму постоянной кривизны для достижения полусферической поверхности концевого эффектора. Эти диски изготовлены из стали или твердого полиамида. Многосегментные модели позвоночника [43–55] выровнены с металлическими межпозвоночными дисками, выровненными на постоянном расстоянии, что обеспечивает нелинейные характеристики демпфирования, а змея [63–67] построена с цилиндрическими трубками, соединенными суставами с вращательной и поступательной степенями свободы. и в основном используется для проверки сквозных отверстий, как показано на Рисунке 3 (b).Чтобы достичь модели континуальной структуры, разработаны модели змей [68–71], которые состоят из плетеных материалов или материалов из сплава с памятью формы и имеют двойное срабатывание, т. Е. Имеют трос или пневматический привод. Ноги осьминога обладают уникальной способностью к передвижению и манипуляциям [188], а щупальца представляют собой крошечные нитевидные структуры, которые используются для захвата и кормления наряду с сенсорным восприятием, что доказывает легкий выбор для энтузиастов робототехники для разработки непрерывных структур. односегментированные (рис. 4 (а)). Laschi et al. [72–76] — одни из первых исследователей, которые разработали модели роботов континуума, построенные с продольными и поперечными приводами с использованием силикона и плетеного волокна в качестве материалов (рис. 3 (b)).Чтобы разработать реалистичный сценарий случая, Guglielmino et al. [78] получили согласие в соответствии с правилами ЕС на выполнение морфометрического анализа нескольких анестезированных осьминогов при поддержке морского биолога. Этот эксперимент предоставил подробную информацию о структуре конечностей осьминога, которая помогла в разработке прототипов [79–83] с использованием сплавов с памятью формы (чувствительных к току) и жидкостных приводов, имитирующих поведение животных.

Надувная рука / безопасное взаимодействие с людьми [147] Экзоскелет / опора для подъема тяжестей [148] Выдвижная рука / осмотр и проникновение [149] НАСА — планетарная рука / исследование космоса [155]
0 Рука -держиваемая рука / очистка и сверление [151]
1 Антропоморфный бот / игры и отдых [152]
2 Надувной шарнирный робот / манипуляции с хрупкими материалами [154]
3 Реконфигурируемый робот / реабилитационная помощь [156]
4 Робот для совместной работы / координация [158] Рука-робот / захват и удержание [157] Рука на тканевой основе / легкая модель [153] 9 0368 Робоперчатка / захват и манипуляции [189]  В этом разделе исследуются континуальные роботы, вдохновленные виноградом и растениями. Сверхгибкий манипулятор (HFM), разработанный Suzuki et al. [160] — один из лучших примеров, вдохновленный виноградной лозой, состоящий из множества неразорванных звеньев и неэластичных пассивных соединений, напоминающих веревку, используемую для лучшего заброса и наматывания вдоль объекта. Основное применение роботов, вдохновленных виноградной лозой, — это исследование космоса и планет. Ученые НАСА, Мехлинг и др. [161] и Tonapi et al.[163], разработали усикового робота (рис. 6 (а)) и робота-манипулятора для минимально инвазивного обследования наряду с манипуляциями для космических операций [160–170]. Робот-усик состоит из трех подсистем с девятью двигателями срабатывания, корпусным механизмом и авионикой, как показано на Рисунке 6 (а) [161]. Чтобы использовать возможность удлинения своих сегментов в продольном направлении, был разработан класс континуальных роботов [175–181], вдохновленных биологическими растениями.
В этом разделе исследуются континуальные роботы, вдохновленные виноградом и растениями. Сверхгибкий манипулятор (HFM), разработанный Suzuki et al. [160] — один из лучших примеров, вдохновленный виноградной лозой, состоящий из множества неразорванных звеньев и неэластичных пассивных соединений, напоминающих веревку, используемую для лучшего заброса и наматывания вдоль объекта. Основное применение роботов, вдохновленных виноградной лозой, — это исследование космоса и планет. Ученые НАСА, Мехлинг и др. [161] и Tonapi et al.[163], разработали усикового робота (рис. 6 (а)) и робота-манипулятора для минимально инвазивного обследования наряду с манипуляциями для космических операций [160–170]. Робот-усик состоит из трех подсистем с девятью двигателями срабатывания, корпусным механизмом и авионикой, как показано на Рисунке 6 (а) [161]. Чтобы использовать возможность удлинения своих сегментов в продольном направлении, был разработан класс континуальных роботов [175–181], вдохновленных биологическими растениями. Их конструкция с пневматическим приводом [181], которая контролирует продольную высоту, состоит из полиамидной конструкции, которая широко используется при развертывании антенн [177–179] или в операциях, требующих перископа [175, 180].Чтобы расширить области применения роботов-виноградных лоз, исследователи обнаружили преимущества использования этих структур [171–174] в других приложениях, включая автономную дозаправку, разведку [174], распыление воды [171], заправку самолетов [173], осмотр тела [170]. , 176], и ремонт двигателя [172], как показано на рисунке 6 (б).
Их конструкция с пневматическим приводом [181], которая контролирует продольную высоту, состоит из полиамидной конструкции, которая широко используется при развертывании антенн [177–179] или в операциях, требующих перископа [175, 180].Чтобы расширить области применения роботов-виноградных лоз, исследователи обнаружили преимущества использования этих структур [171–174] в других приложениях, включая автономную дозаправку, разведку [174], распыление воды [171], заправку самолетов [173], осмотр тела [170]. , 176], и ремонт двигателя [172], как показано на рисунке 6 (б).
2.2. Материал
Полиамидный материал Преимущества Роботы (примеры) Поликарбонат высокая устойчивость к царапинам, высокая ударопрочность ] Смесь полиамида и каучука Сокращение и удлинение Искусственные мышцы [190] Полиуретан Легкая конструкция, термостойкость Робот для ремонта двигателей [172] Перископ и антенный робот [178] Соединение полиамида и углерода Высокая гибкость, устойчивость к окислению и коррозии, электропроводность, сопротивление и эластичность Бионический ствол [29–31] Другие материалы Преимущества Роботы (примеры) Силикон излишне обеспечивает устойчивость к истиранию, кислоте и щелочной среде Осьминог рука [72, 73] Нитинол Инертный материал с максимальным содержанием никеля, очень маневренный и манипулятивный Робот, вдохновленный виноградом [163], робот с позвоночником [ 34] Алюминий Недорогие и легкие Гибридные роботы — мультидиск [191] Плетеная поверхность Высокая прочность и легкий Двухсегментный [34] хобот слона [17] 1 Сплав с памятью формы Прочность и устойчивость к коррозии Конечности осьминога [79–83], хобот слона [21, 23] 3.
 Силовой привод
Силовой привод 3.1. Пневматический привод
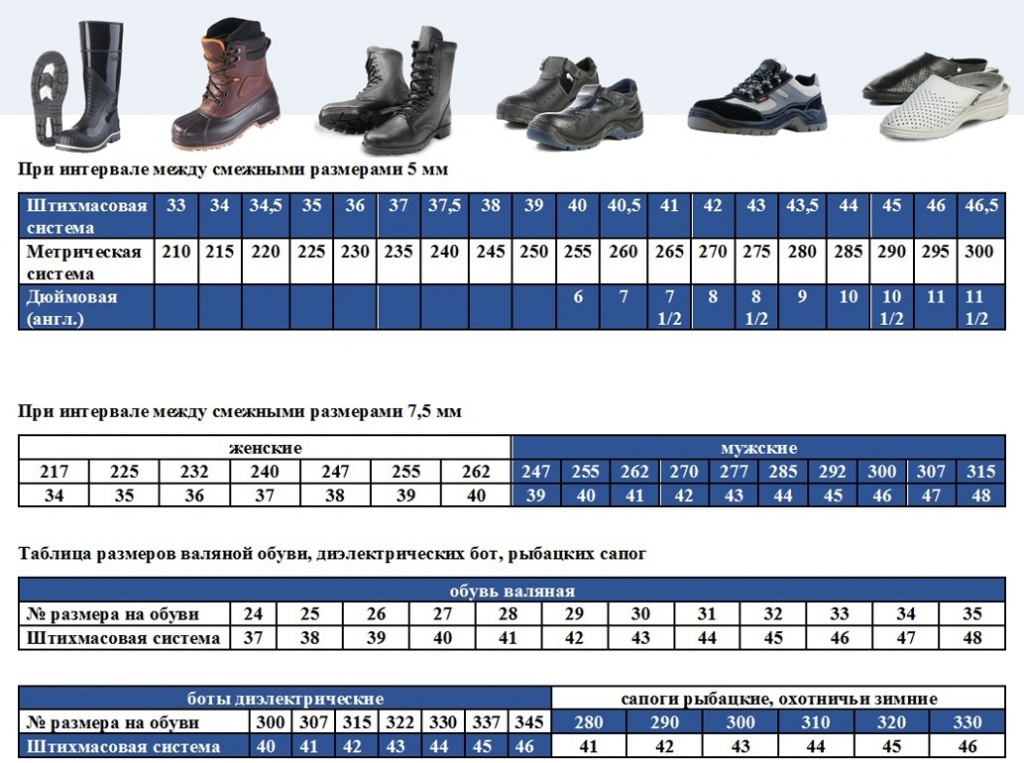 Разрез искусственного пневматического мышечного привода (PMA) вместе с телом, смоделированным с использованием волокна [209] или плетеного [206] материала, показано на рисунке 8.PMA обеспечивает хороший баланс характеристик срабатывания и отношения мощности к весу, описание которого подробно разъясняется в обзоре [221]. Дополнительные примеры континуальных роботизированных структур, разработанных с использованием PMA, показаны в [46, 190, 191, 212–220].
Разрез искусственного пневматического мышечного привода (PMA) вместе с телом, смоделированным с использованием волокна [209] или плетеного [206] материала, показано на рисунке 8.PMA обеспечивает хороший баланс характеристик срабатывания и отношения мощности к весу, описание которого подробно разъясняется в обзоре [221]. Дополнительные примеры континуальных роботизированных структур, разработанных с использованием PMA, показаны в [46, 190, 191, 212–220]. PMA Описание Применение Преимущество Плетеный материал [192–20368]. В основном используется в обрабатывающей промышленности и на легких станках. Эта конструкция обладает полезными свойствами удлинения и сжатия по отношению к входному давлению воздуха. Волокнистый материал [208–211] В настоящее время в промышленности используются два вида волокон, в зависимости от области применения, производимые растениями, животными и геологическими процессами. 
Используется во всех инженерно-технических приложениях. Подходит для работы в тяжелых условиях. Обладает отличной прочностью на скручивание и продольную прочность.
3.2. Электрические двигатели
 3. Приводные механизмы
3. Приводные механизмы Дополнительные элементы дизайна
Дополнительные элементы дизайна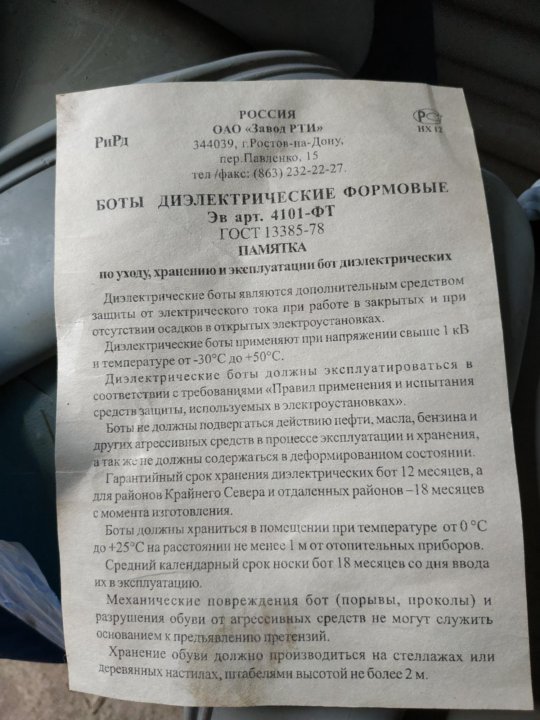 Хотя методы контроля выходят за рамки этого обзора, мы кратко упомянем различные типы датчиков [222–240], используемые в текущем сценарии исследования.Датчики в области мягких роботов в широком смысле классифицируются на три категории в зависимости от их применения, то есть срабатывания силы, формы и оценки положения рабочего органа. Среди различных датчиков оптический датчик оказался лучшим из-за его более низкой устойчивости к ошибкам и его способности использоваться для двойной цели оценки формы и положения рабочего органа (таблица 9).
Хотя методы контроля выходят за рамки этого обзора, мы кратко упомянем различные типы датчиков [222–240], используемые в текущем сценарии исследования.Датчики в области мягких роботов в широком смысле классифицируются на три категории в зависимости от их применения, то есть срабатывания силы, формы и оценки положения рабочего органа. Среди различных датчиков оптический датчик оказался лучшим из-за его более низкой устойчивости к ошибкам и его способности использоваться для двойной цели оценки формы и положения рабочего органа (таблица 9).

 Заключение
Заключение
 0000133283 00000 н.
0000133334 00000 н.
0000135479 00000 н.
0000136236 00000 п.
0000137800 00000 н.
0000137879 00000 н.
0000197228 00000 н.
0000197279 00000 н.
0000199154 00000 н.
0000199974 00000 н.
0000200053 00000 н.
0000281352 00000 н.
0000283033 00000 н.
0000283112 00000 н.
0000370875 00000 н.
0000375923 00000 н.
0000405527 00000 н.
0000405606 00000 н.
0000405877 00000 н.
0000405956 00000 н.
0000406072 00000 н.
0000406113 00000 п.
0000417213 00000 н.
0000417331 00000 п.
0000417400 00000 н.
0000417436 00000 н.
0000417771 00000 н.
0000417850 00000 н.
0000430172 00000 п.
0000430251 00000 п.
0000518690 00000 н.
0000518741 00000 н.
0000522048 00000 н.
0000522087 00000 н.
0000522871 00000 н.
0000523232 00000 н.
0000523311 00000 н.
0000578669 00000 н.
0000578721 00000 н.
0000578838 00000 н.
0000578963 00000 н.
0000578999 00000 н.
0000579078 00000 н.
0000605659 00000 н.
0000605993 00000 н.
0000606062 00000 н.
0000606180 00000 п.
0000606305 00000 н.
0000133283 00000 н.
0000133334 00000 н.
0000135479 00000 н.
0000136236 00000 п.
0000137800 00000 н.
0000137879 00000 н.
0000197228 00000 н.
0000197279 00000 н.
0000199154 00000 н.
0000199974 00000 н.
0000200053 00000 н.
0000281352 00000 н.
0000283033 00000 н.
0000283112 00000 н.
0000370875 00000 н.
0000375923 00000 н.
0000405527 00000 н.
0000405606 00000 н.
0000405877 00000 н.
0000405956 00000 н.
0000406072 00000 н.
0000406113 00000 п.
0000417213 00000 н.
0000417331 00000 п.
0000417400 00000 н.
0000417436 00000 н.
0000417771 00000 н.
0000417850 00000 н.
0000430172 00000 п.
0000430251 00000 п.
0000518690 00000 н.
0000518741 00000 н.
0000522048 00000 н.
0000522087 00000 н.
0000522871 00000 н.
0000523232 00000 н.
0000523311 00000 н.
0000578669 00000 н.
0000578721 00000 н.
0000578838 00000 н.
0000578963 00000 н.
0000578999 00000 н.
0000579078 00000 н.
0000605659 00000 н.
0000605993 00000 н.
0000606062 00000 н.
0000606180 00000 п.
0000606305 00000 н.