Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
- Коллекторные/Brushed (др. названия: DC)/Сoreless.
- Бесколлекторные/Brushless.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
В чем разница между коллекторными и бесколлекторными моторами?
Вступление
Наверняка у каждого новичка, который впервые связал свою жизнь с электромоделями на радиоуправлении, после тщательного изучения начинки, появляется вопрос. Что такое коллекторный (Brushed) и бесколлекторный (Brushless) двигатель? Какой из них лучше поставить на свою радиоуправляемую электромодель?
Что такое коллекторный (Brushed) и бесколлекторный (Brushless) двигатель? Какой из них лучше поставить на свою радиоуправляемую электромодель?
Коллекторные моторы, которые так часто используются для приведения в движение электромоделей на радиоуправлении, имеют всего два исходящих питающих провода. Один из них «+» другой « — ». В свою очередь они подключаются к регулятору скорости вращения. Разобрав коллекторный мотор, вы всегда там найдете 2 магнита изогнутой формы, вал совместно с якорем, на который намотана медная нить (проволока), где по одну сторону вала стоит шестерня, а по другую сторону располагается коллектор, собранный из пластин, в составе которых чистая медь.
Принцип работы коллекторного мотора
Электрический ток (DC или direct current), поступая на обмотки якоря (в зависимости от их количества на каждую по очереди) создает в них электромагнитное поле, которое с одной стороны имеет южный полюс, а с другой стороны северный.
Многие знают, что, если взять два любых магнита и приставить их одноименными полюсами друг другу, то они не за что не сойдутся, а если приставить разноименными, то они прилипнут так, что не всегда возможно их разъединить.
Так вот, это электромагнитное поле, которое возникает в любой из обмоток якоря, взаимодействуя с каждым из полюсов магнитов статора, приводит в действие (вращение) сам якорь. Далее ток, через коллектор и щетки переходит к следующей обмотке и так последовательно, переходя от одной обмотки якоря к другой, вал электродвигателя совместно с якорем вращается, но лишь до тех пор, пока к нему подается напряжение.
В стандартном коллекторном моторе якорь имеет три полюса (три обмотки) – это сделано для того чтобы движок не «залипал» в одном положении.
Минусы коллекторных моторов
Сами по себе коллекторные моторы неплохо справляются со своей работой, но это лишь до того момента пока не возникает необходимость получить от них на выходе максимально высокие обороты. Все дело в тех самых щетках, о которых упоминалось выше. Так как они всегда находятся в плотном контакте с коллектором, то в результате высоких оборотов в месте их соприкосновения возникает трение, которое в дальнейшем вызовет скорый износ обоих и в последствии приведёт к потере эффективной мощности эл. двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
двигателя. Это самый весомый минус таких моторов, который сводит на нет все его положительные качества.
Принцип работы бесколлекторного мотора
Здесь все наоборот, у моторов бесколлекторного типа отсутствуют как щетки так и коллектор. Магниты в них располагаются строго вокруг вала и выполняют функцию ротора. Обмотки, которые имеют уже несколько магнитных полюсов, размещаются вокруг него. На роторе бесколлектоных моторов устанавливается так называемый сенсор (датчик) который будет контролировать его положение и передавать эту информацию процессору который работает в купе с регулятором скорости вращения (обмен данными о положении ротора происходит более 100 раз в секунду). На выходе мы получаем более плавную работу самого мотора с максимальной отдачей.
Бесколлекторные моторы могут быть с датчиком (сенсором) и без него. Отсутствие датчика незначительно снижает эффективность работы мотора, поэтому их отсутствие вряд ли расстроит новичка, но зато, приятно удивит ценник. Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Отличить друг от друга их просто. У моторов с датчиком, помимо 3-х толстых проводов питания есть еще дополнительный шлейф из тонких, которые идут к регулятору скорости. Не стоит гнаться за моторами с датчиком как новичку так и любителю, т.к их потенциал оценит только профи, а остальные просто переплатят, причем значительно.
Плюсы бесколлекторных моторов
Почти нет изнашиваемых деталей. Почему «почти», потому что вал ротора устанавливается на подшипники, которые в свою очередь имеют свойство изнашиваться, но ресурс у них крайне велик, да и взаимозаменяемость их очень проста. Такие моторы очень надежны и эффективны. Устанавливается датчик контроля положения ротора. На коллекторных моторах работа щеток всегда сопровождается искрением, что впоследствии вызывает помехи в работе радиоаппаратуры. Так вот у бесколлектоных, как вы уже поняли, эти проблемы исключены. Нет трения, нет перегрева, что так же является существенным преимуществом. По сравнению с коллекторными моторами не требуют дополнительного обслуживания в процессе эксплуатации.
Минусы бесколлекторных моторов
У таких моторов минус только один, это цена. Но если посмотреть на это с другой стороны, и учесть тот факт что эксплуатация бесколлекторных моторов освобождает владельца сразу от таких заморочек как замена пружин, якоря, щеток, коллекторов, то вы с легкостью отдадите предпочтение в пользу последних.
Бесколлекторные двигатели постоянного тока. Что это такое? — Avislab
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей.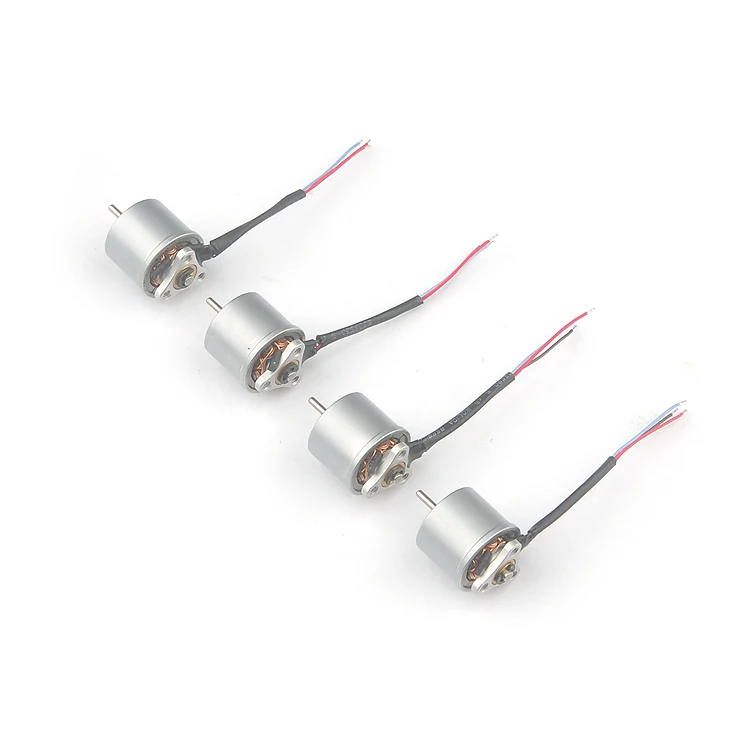 Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Для управления двигателем применяется электронный регулятор.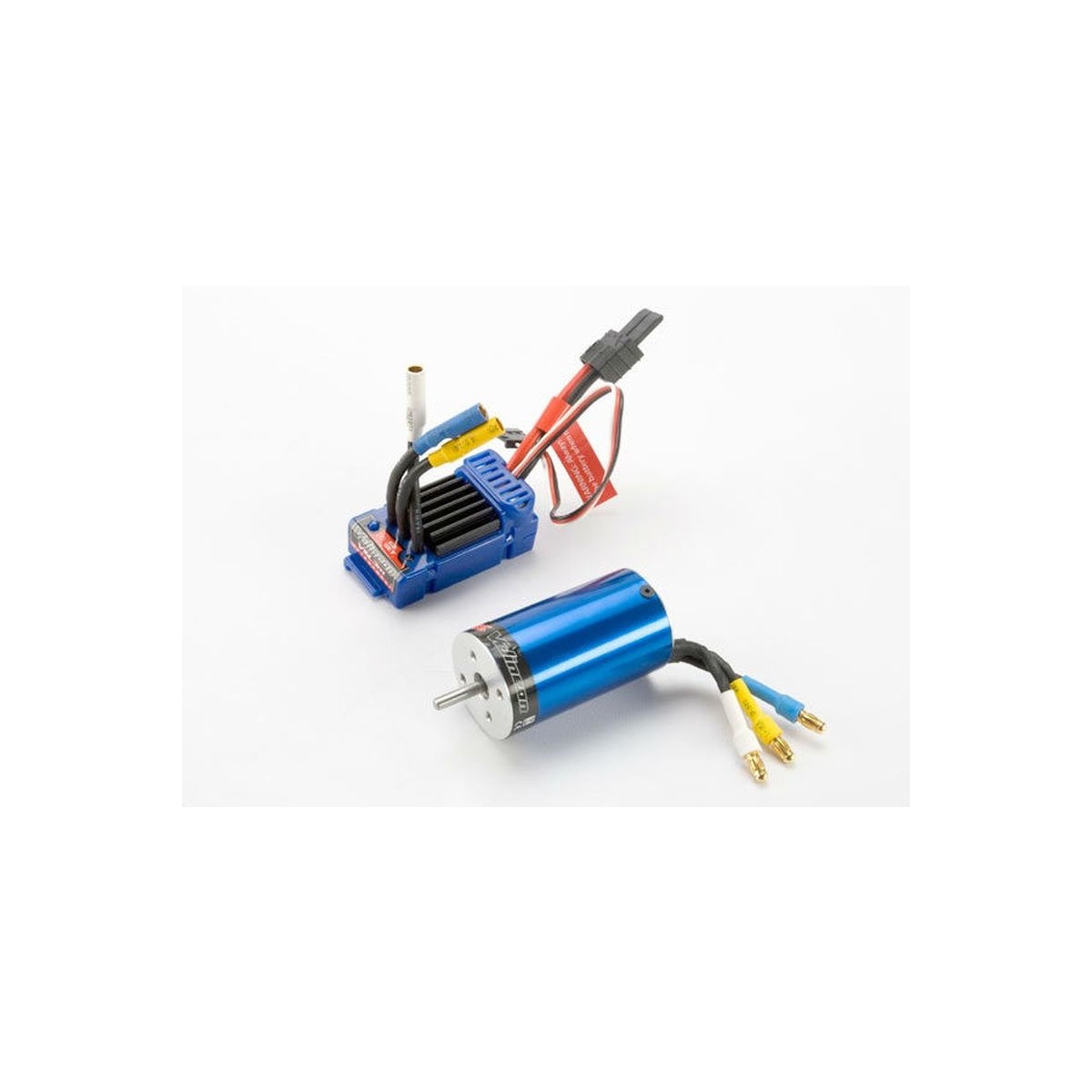 В зарубежной литературе Speed Controller или ESC (Electronic speed control).
В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы «ну это как синхронник», или еще хуже «он похож на шаговик». Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор «кормит» двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Попробуем разобраться, что собой представляет бесколлекторный двигатель постоянного тока (Brushles Direct Current Motor). В самой этой фразе уже кроется ответ — это двигатель постоянного тока без коллектора. Функции коллектора выполняет электроника.
Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел — коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения. На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.
Конструкция бесколлекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех.Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
Что происходит в регуляторе бесколлекторного двигателя?
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель. Из школьного курса физики помним, как магнитное поле действует на рамку с током.
То же самое делает и электроника, управляющая бесколлекторным двигателем — в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя . Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее. Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает.
В каких случаях применяют бесколлекорные двигатели с датчиками, а в каких — без датчиков? В чем их отличие?
Двигатели с датчиками положения более предпочтительны с технической точки зрения. Алгоритм управления такими двигателями значительно проще. Однако есть и свои минусы: требуется обеспечить питание датчиков и прокладку проводов от датчиков в двигателе к управляющей электронике; в случае выхода со строя одного из датчиков, двигатель прекращает работу, а замена датчиков, как правило, требует разборки двигателя.
В тех случаях, когда конструктивно невозможно разместить датчики в корпусе двигателя, используют двигатели без датчиков. Конструктивно такие двигатели практически не отличаются от двигателей с датчиками. А вот электронный блок должен уметь управлять двигателем без датчиков. При этом блок управления должен соответствовать характеристикам конкретной модели двигателя.
Если двигатель должен стартовать с существенной нагрузкой на валу двигателя (электротранспорт, подъёмные механизмы и т.п.) — применяют двигатели с датчиками.
Если двигатель стартует без нагрузки на валу (вентиляция, воздушный винт, применяется центробежная муфта сцепления и т.п.), можно применять двигатели без датчиков. Запомните: двигатель без датчиков положения должен стартовать без нагрузки на валу. Если это условие не соблюдается, следует использовать двигатель с датчиками. Кроме того, в момент старта двигателя без датчиков возможны вращательные колебания оси двигателя в разные стороны. Если это критично для Вашей системы, применяйте двигатель с датчиками.
Три фазы
Трехфазные бесколлекторные двигатели приобрели наибольшее распространение. Но они могут быть и одно, двух, трех и более фазными. Чем больше фаз, тем более плавное вращение магнитного поля, но и сложнее система управления двигателем. 3-х фазная система наиболее оптимальна по соотношению эффективность/сложность, поэтому и получила столь широкое распространение. Далее будет рассматриваться только трехфазная схема, как наиболее распространенная. Фактически фазы — это обмотки двигателя. Поэтому если сказать «трехобмоточный», думаю, это тоже будет правильно. Три обмотки соединяются по схеме «звезда» или «треугольник». Трехфазный бесколлекторный двигатель имеет три провода — выводы обмоток, см. рисунок.
Двигатели с датчиками имеют дополнительных 5 проводов (2-питание датчиков положения, и 3 сигналы от датчиков).
В трехфазной системе в каждый момент времени напряжение подается на две из трех обмоток. Таким образом, есть 6 вариантов подачи постоянного напряжения на обмотки двигателя, как показано на рисунке ниже.
Это позволяет создать вращающееся магнитное поле, которое будет проворачиваться «шагами» на 60 градусов при каждом переключении. Но не будем забегать наперед. В следующей статье будут рассмотрены устройство бесколлекторного двигателя, варианты расположения магнитов, обмоток, датчиков и т.д., а позже будут рассмотрены алгоритмы управления бесколлекторными двигателями.
Бесколлекторные моторы «на пальцах» Что такое бесколлекторные моторы и как управлять бесколлекторными моторами:
Статьи по бесколлекторным моторам:
чем отличаются бесщеточные двигатели от щеточных в профессиональном инструменте?
Профессиональные инструменты Kress производят в соответствии с современными тенденциями, поэтому на нашем сайте тоже можно найти специальную характеристику двигателя – щёточный коллекторный или бесщеточный бесколлекторный.
Принцип работы устройств KRESS с щеточным двигателем
Основой механизма служит якорь, и представляет он из себя металлический вал. Как движущийся элемент вал обеспечивает наличие крутящего момента. В щеточном коллекторном двигателе на якорь прикреплен ротор – вращающийся барабан, которой потребляет основной ток и вырабатывает электродвижущую силу. В действие ротор (и якорь) приводит обмотка – медная проволока, накрученная с разных сторон ротора. Ток проходит по проволоке и создаёт магнитное поле, за счет которого происходит вращение элемента.
С противоположных концов якоря расположены подшипники. Они обеспечивают сбалансированное вращение. Между ними с одной из сторон обмотки находится коллектор – соединенные между собой медные контакты, которые окружают графитные щетки. Из-за щеток коллекторному инструменту часто приписывают два минуса – износ при трении и искрение при запуске все из-за того же трения. Но в профессиональном инструменте Kress, в отличие от бытовых аналогов, щетки они износостойкие, а возможность искрения сходит на нет благодаря плавным пусковым механизмам. Задача щеток заключается в передаче напряжения через коллектор в обмотки.
Все детали закреплены в сердечник статора – статичный элемент всего механизма. Все вышеописанные детали щеточного коллекторного двигателя находятся внутри состоящего из металлических пластин статора.
Из-за щеток коллекторному инструменту часто приписывают два минуса – износ при трении и искрение при запуске все из-за того же трения. Но в профессиональном инструменте Kress, в отличие от бытовых аналогов, щетки они износостойкие, а возможность искрения сходит на нет благодаря плавным пусковым механизмам. Задача щеток заключается в передаче напряжения через коллектор в обмотки.
Все детали закреплены в сердечник статора – статичный элемент всего механизма. Все вышеописанные детали щеточного коллекторного двигателя находятся внутри состоящего из металлических пластин статора.
За счет отсутствия дорогих материалов и простой конструкции щеточного двигателя такие инструменты Kress стоят дешевле бесщеточных, а их техническое обслуживание не требует больших затрат. К тому же при должном уходе и соблюдении условий эксплуатации каждый инструмент прослужит долгое время.
Принцип работы устройств с бесщеточным двигателем KRESS BRUSHLESS MOTOR
Ротор бесщеточного бесколлекторного двигателя оснащен постоянным магнитом. По-прежнему статичный статор же здесь расположен внутри ротора. Медные обмотки теперь находятся на статоре. При подаче постоянного тока на обмотку она запитывается и становится электромагнитом.
Работа бесщеточного бесколлекторного двигателя KRESS BRUSHLESS MOTOR основана на взаимодействие магнитных полей постоянным магнитом (на роторе) и электромагнитом (обмотки на статоре). Когда катушки находятся под напряжением противоположные полюса ротора и статора к друг-другу, заставляя первый вращаться. Как и на какую катушку подавать напряжение определяет электронный контроллер. Он оснащен датчиком Холла, который измеряет величину магнитного поля. Нужен он для того, чтобы увеличить итоговую выходную мощность.
По-прежнему статичный статор же здесь расположен внутри ротора. Медные обмотки теперь находятся на статоре. При подаче постоянного тока на обмотку она запитывается и становится электромагнитом.
Работа бесщеточного бесколлекторного двигателя KRESS BRUSHLESS MOTOR основана на взаимодействие магнитных полей постоянным магнитом (на роторе) и электромагнитом (обмотки на статоре). Когда катушки находятся под напряжением противоположные полюса ротора и статора к друг-другу, заставляя первый вращаться. Как и на какую катушку подавать напряжение определяет электронный контроллер. Он оснащен датчиком Холла, который измеряет величину магнитного поля. Нужен он для того, чтобы увеличить итоговую выходную мощность.
Таким образом отсутствие щеток в двигателе KRESS BRUSHLESS MOTOR снимает вопрос о возможности искрения или загрязнения мотора. .
Профессиональные инструменты Kress с щеточными коллекторными двигателями отлично справляются со своими задачами и подойдут любителям проверенных временем технологий.
Инструменты, оснащённые технологией KRESS BRUSHLESS MOTOR, помогут выйти на новый уровень комфорта при работе и приятно удивят пользователей своей мощностью.
Что такое BLDC-мотор
BLDC двигатель, он же вентильный двигатель — это бесколлекторный синхронный двигатель постоянного тока на постоянных магнитах. Функцию коллектора в данном случае выполняет электронный контроллер, как если бы двигатель был коллекторный — контроллер переключает обмотки в зависимости от положения ротора с магнитами, определяемого датчиками Холла, установленными в мотор. Если двигатель застопорить, то контроллер будет подавать ток в те две фазы, которые должны его стронуть в нужную сторону. Контроллер не будет переключать фазы, пока ротор стоит. Дополнительно в отличие от механических коллекторов,это обеспечивает работу большого количества магнитных пар,чем может быть обеспечен значительно больший момент.
По сути, BLDC – это коллекторный двигатель с «электронным коллектором», но лишенный его недостатков в виде механического износа щеток и постоянного обслуживания щеточного узла для удаления нагара и загрязнений.
«Вентильный электродвигатель» — это наше, советское название. В зарубежной литературе они называются по другому. Общие аббревиатуры для обозначения синхронных бесколлектроных электродвигателей постоянного тока — это BLDC или PMSM:
- BLDC — Brushless DC electric motor (бесколлекторный электродвигатель постоянного тока).
- PMSM — Permanent Magnet Synchronous Motor (синхронный двигатель с постоянными магнитами).
Конструкция:
В роторе двигателя размещаются постоянные магниты, создающие магнитное поле, которые чередуются + — + -… В зависимости от количества магнитов, двигатель имеет соответствующее количество полюсов. Роторы линейки Golden Motor 3-5-10-20кВт имеют 8 магнитов, т.е. 4 пары магнитов.
Статор сделан из электротехнической стали и медной обмотки, уложенной в пазы сердечника. Количество обмоток определяет количество фаз двигателя. Для вращения необходимы 3 фазы. Обычно ВД трёхфазные, в Golden Motor в т.ч.
Для вращения необходимы 3 фазы. Обычно ВД трёхфазные, в Golden Motor в т.ч.
BLDC двигатель так же имеет более высокие эксплуатационные характеристики по сравнению с асинхронными двигателями. Он обладает лучшей удельной мощностью (мощность на килограмм массы), лучшим КПД, особенно на низких оборотах и на старте, более простое управление (асинхронным двигателям требуется чистый синус).
Каждому мотору нужен свой управляющий контроллер.
Ниже представлено видео, объясняющая принцип действия:
Что такое KV у мотора?
kV — что это такое и откуда берется?Как известно, любой электрический мотор может работать как генератор, то есть способен не только преобразовывать электрическую энергию в кинетическую, но и наоборот, если крутить ротор мотора, то на клеммах будет напряжение.
Но, поскольку эффективность мотора как генератора достаточно низкая, то генерируемое обратное напряжение значительно ниже, чем подаваемое от аккумулятора.
Именно за счет использования обратной ЭДС работает рекуперативное торможение — мотор, находящийся в режиме генератора используется для зарядки аккумулятора. Ну или можно просто нагрузить мотор на балластную нагрузку, рассеивая энергию в тепло. Можете провести эксперимент — замкните три провода от мотора друг с другом и попробуйте покрутить ротор — сразу почувствуете, что такое реостатное торможение 🙂
Так вот, параметр kV показывает на каких оборотах мотор будет генерировать обратную ЭДС 1В. То есть, мотор 2600kV будет генерировать обратное напряжение 1В на скорости 2600 об./мин.
Если мотор раскручивать до более высоких оборотов, то в определенный момент генерируемое обратное напряжение сравняется с напряжением аккумулятора и мотор перестанет набирать обороты. Таким образом параметр kV в первую очередь характеризует максимальные обороты, на которых способен работать мотор.
Таким образом параметр kV в первую очередь характеризует максимальные обороты, на которых способен работать мотор.
Параметр kV зависит от эффективности работы мотора в режиме генератора — чем эффективнее мотор генерирует обратную ЭДС, тем меньше значение kV.
Но эффективность мотора в режиме генератора, и его эффективность в режиме, собственно, мотора неразрывно связаны. Мотор с высоким крутящим моментом будет одновременно и более эффективным генератором.
Именно поэтому есть обратная зависимость между значением kV и крутящим моментом мотора — моторы с низким kV более тяговитые.
В рамках одной модельной линейки моторы с разным kV отличаются количеством витков обмотки — чем меньше витков, тем больше kV.
Как следствие, намотать обмотку с меньшим количеством витков можно более толстым проводом, что снизит активное сопротивление обмотки и позволит мотору выдерживать большие токи.
Маркировка бесколлекторных моторов для квадрокоптеров, авиамоделей, автомоделей и т.д.
Сегодня в продаже существует великое множество бесколлекторных моторов разных размеров и характеристик: 2212, 2306, 5010 и т.д., но что означают эти цифры?
Маркировка бесколлекторных моторов.
Давайте рассмотрим на примере популярного мотора A2212 1000KV 12N14P
2212 (BLDC) BRUSHLESS DC MOTOR — безколлекторный мотор постоянного тока, работающий на высоких оборотах, специально разработанный для применения в квадрокоптерах, самолетах и других моделях техники. Данные моторы построены по схеме OUTRUNNER, т.е. вращающаяся внешняя часть и стационарная внутренняя. Такой тип моторов очень популярен на рынке, так как достаточно дешев. Моторы данного типа выпускаются с разными характиристиками и поэтому необходимо точно разбираться в них, что бы выбрать лучший мотор для своей модели.
Наименование таких моторов обычно выглядит так: 2212 13T 1000KV 2-4S 12N14P
- 22 — Диаметр статора, 22мм в данном случае. Чем больше диаметр статора, тем выше его крутящий момент, тем большего диаметра пропеллер можно установить на модель, тем больше тяга на одних и тех же оборотах, тем меньше энергопотребление необходимое для развития той же мощности, чем для более мелких моторов. Сплошные плюсы 😉
- 12 — Длина статора, 12мм в данном случае. Не путать с высотой мотора. Это высота элемента (зуба), на который накручен проводник внутри мотора.
- 13T — Число витков, оборотов проводника на каждом зубе мотора. Меньшее количество витков означает большую скорость мотора, но меньший крутящий момент, и наоборото, больше витков — меньше скорость и больший крутящий момент.
- 1000KV — количество оборотов мотора на 1 вольт подающегося напряжения. Если на этот мотор подать 10В, то он будет вращаться со скоростью 10 000 об/мин. (RPM) Но помните, это скорость обращения пустого вала, если на вал будет установлен пропеллер или какой-то элемент редуктора, то скорость вращения вала может, и обязательно будет, иной, явно меньшей.
- 2-4S — рабочее напряжение мотора, указывается в количестве банок аккумулятора, подробнее читайте в LI-PO АККУМУЛЯТОРЫ. МАРКИРОВКА.
Колчество магнитов
Иногда в маркировке мотора можно увидеть еще такое обозначение (12N14P). Число перед N означает количество электромагнитов (зубьев) в моторе, а число перед P — количество постоянных магнитов. В большинстве своем, моторы для квадрокоптеров имеют именно такую конфигурацию. Моторы с меньшим KV могут иметь немного меньшее количество магнитов, для более эффективного набора тяги, но сильно этот параметр на крутящий момент не влияет. поэтому чаще всего данный параметр упускается из обозначений и обращать особого внимание на него не стоит.
Прямое или обратное вращение (CW/CWW)
Маркировка у моторов может иметь значения CW и CCW, что означает Clockwise (По часовой стрелке — Прямое), Counter Clockwise (Против часовой стрелки — Обратно). Но это не означает, что мотор может вращаться только в определенном направлении, об этом мы поговорим ниже. Тут речь идет о направлении резьбы на валу мотора, если она имеется. Резьба на валу чаще всего встречается на моторах для квадрокоптеров или самолетов/крыльев, где предусмоттрена установка пропеллеров. Направление резьбы в определенную сторону не дает раскручиваться гайкам крепящим пропеллер. Но как показывает практика, это не является критичным, так как хорошо зажатый и законтрогаенный пропеллер не откручивается.
Принципиальная схема бесколлекторного мотора.
БК моторы подключаются тремя проводами,в каждую единицу времени напряжение подается на две соседние (любые две) обмотки, что заставляет мотор переместиться на один такт (фазу) в нужную сторону. Например подавая напряжение на обмотки W1, W2 (L1, L2) мы заставим мотор сместиться вправо или влево. Направление движения зависит от полярности на контактах L1 и L2. Следовательно, что бы сменить направление движения БК мотора, необходимо поменять полярность любых двух проводов.
Матовые и бесщеточные двигатели: в чем разница?
Вот уже несколько лет мы наблюдаем, как бесщеточные двигатели начинают доминировать в индустрии профессиональных инструментов в аккумуляторных инструментах. Это здорово, но что в этом такого? Разве это имеет значение, пока я могу заворачивать этот шуруп по дереву? Ну да, это так. Существенные различия и последствия существуют при работе с щеточными и бесщеточными двигателями.
Начните здесь: как работает щеточный двигатель постоянного тока
Прежде чем мы углубимся в сравнение щеточных и бесщеточных двигателей с двумя опорами, давайте рассмотрим основы того, как на самом деле работает двигатель постоянного тока.Когда дело доходит до управления двигателем, все дело в магнитах. Противоположно заряженные магниты притягиваются друг к другу. Основная идея двигателя постоянного тока состоит в том, чтобы удерживать противоположный заряд вращающегося элемента (ротора), притягивая неподвижные магниты (статор) перед ним, чтобы обеспечить постоянное тяговое усилие вперед. Это все равно что держать перед собой бостонский кремовый пончик на палочке, пока я бегу — я буду продолжать пытаться его поймать!
Вопрос в том, как заставить этот пончик двигаться. Нет простого способа сделать это.Он начинается с набора магнитов, которые удерживают постоянный заряд (постоянные магниты). У набора электромагнитов изменяется заряд (меняя полярность) во время вращения, поэтому всегда есть противоположно заряженный постоянный магнит, к которому он может двигаться. Кроме того, подобный заряд, который испытывает электромагнитная катушка при изменении, отталкивает катушку. Когда мы смотрим на щеточные и бесколлекторные двигатели, разница заключается в том, как электромагнит меняет полярность.
Взгляд внутрь щеточного двигателя
В щеточном двигателе есть четыре основные части: постоянные магниты, якорь, коллекторные кольца и щетки.Постоянные магниты составляют внешнюю часть механизма и не двигаются (статор). Один заряжен положительно, а другой отрицательно создает постоянное магнитное поле.
Якорь представляет собой катушку или ряд катушек, которые становятся электромагнитами при подаче питания. Это также вращающаяся часть (ротор), обычно она сделана из меди, хотя возможен и алюминий.
Кольца коммутатора крепятся к катушке якоря двумя (2-полюсная конфигурация), четырьмя (4-полюсная конфигурация) или более частями.Они вращаются с арматурой. Наконец, угольные щетки остаются на месте и доставляют электрический заряд к каждой части коммутатора.
Все дело в якоре
Когда якорь запитан, заряженная катушка притягивается к противоположно заряженному постоянному магниту. Поскольку кольцо коммутатора над ним также вращается, оно перемещается от соединения с одной угольной щеткой к другой. Когда он достигает следующей щетки, он меняет полярность и теперь притягивается к другому постоянному магниту, отталкиваясь таким же зарядом.Ощутимо, когда коммутатор достигает отрицательной щетки, он теперь притягивается к положительному постоянному магниту. Коммутатор прибывает как раз вовремя, чтобы соединиться с положительной щеткой, и следует за отрицательным постоянным магнитом. Щетки расположены парами, поэтому положительная катушка будет тянуться к отрицательному магниту, а отрицательная катушка будет тянуться к положительному магниту одновременно.
Я как катушка якоря гоняюсь за бостонским кремом. Я подхожу ближе, но затем передумаю и перехожу на более здоровый смузи (моя полярность или желание изменились).В конце концов, пончик полон калорий и жира. Теперь я гоняюсь за смузи, пока меня отталкивают от бостонского крема. Добравшись до места, я понимаю, насколько вкуснее будет этот пончик над смузи. Пока курок нажат, я передумываю каждый раз, когда перехожу к следующей кисти, отчаянно гоняясь за объектом моей привязанности по кругу. Это высшее проявление СДВГ, которое можно найти с пользой. Кроме того, нас там двое, поэтому один из нас всегда страстно, но нерешительно гнался за бостонскими кремовыми пончиками и смузи.
Внутри бесщеточного двигателя
В бесщеточном двигателе вы теряете коммутатор и щетки, а получаете электронный контроллер. Теперь постоянные магниты действуют как ротор и вращаются внутри, в то время как статор состоит из неподвижных электромагнитных катушек, которые теперь находятся снаружи. Контроллер питает каждую катушку в зависимости от того, какой заряд ей нужен для притяжения постоянного магнита.
В дополнение к электронному перемещению заряда, контроллер также может обеспечивать такой же заряд, чтобы противостоять постоянному магниту.Поскольку одинаковые заряды противостоят друг другу, это толкает постоянный магнит. Теперь ротор движется за счет тяги и толчка.
В этом случае постоянные магниты движутся, так что теперь они мой партнер по бегу и я. Мы больше не меняем своих мыслей о том, чего хотим. Вместо этого мы знаем, что я хочу пончик с кремом Бостон, а мой партнер хочет смузи.
Электронный контроллер заставляет нас двигаться вперед, и мы всегда гонимся за одним и тем же.Контроллер также помещает то, что нам не нужно, прямо позади, чтобы предложить толчок.
Стоимость щеточных двигателей постоянного тока по сравнению с бесщеточными
Щеточные двигатели постоянного тока относительно просты, а детали для его изготовления недороги (хотя медь не становится дешевле). Поскольку для бесщеточных двигателей требуется этот электронный коммуникатор, вы, по сути, начинаете собирать компьютер внутри своего беспроводного инструмента. Это то, что увеличивает стоимость бесщеточных двигателей.
Эффективность щеточных и бесщеточных двигателей
Бесщеточные двигатели имеют несколько преимуществ по сравнению с щеточными двигателями благодаря своей конструкции.Во многом это связано с потерей щеток и коммутатора. Поскольку щетка должна контактировать с коммутатором для доставки заряда, это также вызывает трение. Трение снижает скорость, которая может быть достигнута вместе с нагревом. Это как ехать на велосипеде с слегка затянутым тормозом. При таком же усилии ног вы будете медленнее. И наоборот, если вы хотите поддерживать скорость, это потребует больше энергии от ваших ног. Вы также нагреете свои диски от тепла трения.Это означает, что по сравнению с щеточными двигателями бесщеточные двигатели работают холоднее. Это дает им большую эффективность, поэтому они преобразуют больше электроэнергии в мощность.
Угольные щетки также со временем изнашиваются. Это то, что вызывает искру внутри некоторых инструментов. Чтобы инструмент продолжал работать, щетки необходимо время от времени заменять. Бесщеточные двигатели не требуют такого обслуживания.
В то время как для бесщеточных двигателей требуется электронный контроллер, комбинация ротор / статор более компактна. Это дает возможность получить меньший вес и более компактный размер.Вот почему мы видим так много инструментов, как ударный шуруповерт Makita XDT16, которые имеют сверхкомпактную конструкцию и большой мощности.
Крутящий момент между щеточными и бесщеточными двигателями
Кажется, существует неправильное представление о бесщеточных двигателях и крутящем моменте. Сама по себе конструкция двигателя с щеткой или бесщеточным двигателем на самом деле не показывает величину крутящего момента. Например, первая ударная дрель Milwaukee M18 FUEL имела меньший реальный крутящий момент, чем предшествующая ей щеточная модель.
Однако в конце концов производители поняли кое-что очень важное.Электроника, используемая в бесщеточных двигателях, может при необходимости обеспечивать эти двигатели большей мощностью.
Поскольку в бесщеточных двигателях теперь используется усовершенствованное электронное управление, они могут определять, когда они начинают замедляться под нагрузкой. Пока аккумулятор и двигатель находятся в пределах температурных характеристик, электроника бесщеточного двигателя может запрашивать и получать больший ток от аккумуляторной батареи. Это позволяет таким инструментам, как бесщеточные дрели и пилы, поддерживать большую скорость под нагрузкой. Это делает их быстрее. Часто намного быстрее .Некоторые примеры этого включают Milwaukee RedLink Plus, Makita LXT Advantage и DeWalt Perform and Protect.
Эти технологии плавно объединяют двигатель инструмента, аккумулятор и электронику в единую систему для достижения максимальной производительности и продолжительности работы.
Более глубокое погружение в технологию двигателей BLDC
Коммутация — изменение полярности заряда — запускает бесщеточный двигатель и поддерживает его вращение. Затем вам нужно контролировать как скорость, так и крутящий момент. Изменение напряжения на статоре двигателя BLDC регулирует скорость.Модуляция напряжения на более высоких частотах позволяет вам контролировать скорость двигателя в еще большей степени.
Для управления крутящим моментом вы можете снизить напряжение статора, когда крутящая нагрузка двигателя превышает определенные уровни. Конечно, здесь возникает основная потребность: мониторинг двигателя и датчики.
Датчики на эффекте Холла обеспечивают недорогой способ определения положения ротора. Они также могут определять скорость по времени и частоте переключения датчиков.
Примечание редактора: Ознакомьтесь с нашей статьей «Бесколлекторный двигатель без датчика», чтобы узнать, как передовые технологии двигателей с постоянным током постоянного тока меняют электроинструменты.
Окончательный вердикт
Комбинация этих преимуществ дает еще один эффект — более длительный срок службы. Хотя гарантия, как правило, одинакова для щеточных и бесщеточных двигателей (и инструментов) внутри бренда, вы можете рассчитывать на более длительный срок службы бесщеточных моделей. Это часто может длиться годами после истечения срока гарантии.
Помните, что я сказал об электронном контроллере, который, по сути, составляет компьютер в вашем инструменте? Бесщеточный двигатель также стал прорывом в производстве интеллектуальных инструментов.Технология Milwaukee One-Key не работала бы, если бы бесщеточный двигатель не зависел от электронных коммуникаций.
Бесщеточные двигатели постоянного тока против щеточных двигателей постоянного тока: когда и почему выбирать один вместо другого | Статья
.СТАТЬЯ
Пит Миллетт
Получайте ценные ресурсы прямо на ваш почтовый ящик — рассылается раз в месяц
Мы ценим вашу конфиденциальность
Введение
Во многих приложениях управления движением используются двигатели постоянного тока с постоянными магнитами.Поскольку проще реализовать системы управления с использованием двигателей постоянного тока по сравнению с двигателями переменного тока, они часто используются, когда необходимо контролировать скорость, крутящий момент или положение.
Существует два типа обычно используемых двигателей постоянного тока: щеточные двигатели и бесщеточные двигатели (или двигатели постоянного тока с BLDC). Как следует из их названия, щеточные двигатели постоянного тока имеют щетки, которые используются для переключения двигателя, чтобы заставить его вращаться. Бесщеточные двигатели заменяют механическую функцию коммутации электронным управлением.
Во многих случаях можно использовать щеточный или бесщеточный двигатель постоянного тока.Они работают на тех же принципах притяжения и отталкивания между катушками и постоянными магнитами. У обоих есть преимущества и недостатки, из-за которых вы можете выбрать один из них, в зависимости от требований вашего приложения.
Щеточные двигатели постоянного тока
Щеточные двигатели постоянного тока (изображение: maxon group)
В двигателях постоянного токадля создания магнитного поля используются намотанные катушки из проволоки. В щеточном двигателе эти катушки могут свободно вращаться, приводя в движение вал — они являются частью двигателя, называемой «ротором».Обычно катушки намотаны вокруг железного сердечника, хотя есть также электродвигатели с щеточным покрытием, которые не имеют сердечника, когда обмотка является самоподдерживающейся.
Неподвижная часть двигателя называется «статором». Постоянные магниты используются для создания постоянного магнитного поля. Обычно эти магниты расположены на внутренней поверхности статора вне ротора.
Для создания крутящего момента, который заставляет ротор вращаться, магнитное поле ротора должно непрерывно вращаться, так что это поле притягивает и отталкивает фиксированное поле статора.Чтобы поле вращалось, используется ползунковый электрический переключатель. Переключатель состоит из коммутатора, который обычно представляет собой сегментированный контакт, установленный на роторе, и неподвижных щеток, установленных на статоре.
По мере вращения ротора коммутатор постоянно включает и выключает различные наборы обмоток ротора. Это заставляет катушки ротора постоянно притягиваться и отталкиваться от неподвижных магнитов статора, что заставляет ротор вращаться.
Поскольку существует некоторое механическое трение между щетками и коллектором — и поскольку это электрический контакт, он обычно не подлежит смазке — происходит механический износ щеток и коллектора в течение всего срока службы двигателя.Этот износ в конечном итоге достигнет точки, когда двигатель перестанет работать. Многие щеточные двигатели, особенно большие, имеют сменные щетки, обычно сделанные из угля, которые предназначены для поддержания хорошего контакта при износе. Эти двигатели требуют периодического обслуживания. Даже со сменными щетками, в конечном итоге, коммутатор также изнашивается до такой степени, что необходимо заменить двигатель.
Для приведения в действие щеточного двигателя на щетки подается постоянное напряжение, которое пропускает ток через обмотки ротора, заставляя двигатель вращаться.
В случаях, когда необходимо вращение только в одном направлении и не нужно контролировать скорость или крутящий момент, для щеточного двигателя не требуется никакой приводной электроники. В таких приложениях напряжение постоянного тока просто включается и выключается, чтобы двигатель работал или останавливался. Это типично для недорогих приложений, таких как моторизованные игрушки. Если необходимо реверсирование, это можно сделать с помощью двухполюсного переключателя.
Для облегчения управления скоростью, крутящим моментом и направлением используется «H-мост», состоящий из электронных переключателей — транзисторов, IGBT или MOSFET — позволяющих двигателю вращаться в любом направлении.Это позволяет подавать напряжение на двигатель любой полярности, что заставляет двигатель вращаться в противоположных направлениях. Скорость или крутящий момент двигателя можно контролировать с помощью широтно-импульсной модуляции одного из переключателей.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока (изображение maxon group)
Бесщеточные двигатели постоянного тока работают по тому же принципу магнитного притяжения и отталкивания, что и щеточные двигатели, но они устроены несколько иначе. Вместо механического коммутатора и щеток магнитное поле статора вращается с помощью электронной коммутации.Это требует использования активной управляющей электроники.
В бесщеточном двигателе к ротору прикреплены постоянные магниты, а к статору — обмотки. Бесщеточные двигатели могут быть сконструированы с ротором внутри, как показано выше, или с ротором на внешней стороне обмоток (иногда называемый двигателем с опережением).
Число обмоток, используемых в бесщеточном двигателе, называется числом фаз. Хотя бесщеточные двигатели могут быть сконструированы с различным числом фаз, наиболее распространены трехфазные бесщеточные двигатели.Исключение составляют небольшие охлаждающие вентиляторы, которые могут использовать только одну или две фазы.
Три обмотки бесщеточного двигателя соединены по схеме «звезда» или «треугольник». В любом случае к двигателю подключаются три провода, а технология привода и форма сигнала идентичны.
Трехфазные двигатели могут быть сконструированы с различными магнитными конфигурациями, называемыми полюсами. Самые простые трехфазные двигатели имеют два полюса: ротор имеет только одну пару магнитных полюсов: северный и южный.Двигатели также могут быть построены с большим количеством полюсов, что требует большего количества магнитных секций в роторе и большего количества обмоток в статоре. Более высокое количество полюсов может обеспечить более высокую производительность, хотя очень высокие скорости лучше достигаются с меньшим количеством полюсов.
Для приведения в действие трехфазного бесщеточного двигателя необходимо, чтобы каждая из трех фаз могла быть подключена либо к входному напряжению питания, либо к земле. Для этого используются три схемы управления «полумостом», каждая из которых состоит из двух переключателей.Переключатели могут быть биполярными транзисторами, IGBT или MOSFET, в зависимости от требуемого напряжения и тока.
Существует ряд методов привода, которые можно использовать для трехфазных бесщеточных двигателей. Самый простой из них называется трапециевидной, блочной или 120-градусной коммутацией. Трапецеидальная коммутация в чем-то похожа на метод коммутации, используемый в щеточном двигателе постоянного тока. В этой схеме в любой момент времени одна из трех фаз подключена к земле, одна остается разомкнутой, а другая приводится в действие напряжением питания.Если требуется управление скоростью или крутящим моментом, обычно фаза, подключенная к источнику питания, имеет широтно-импульсную модуляцию. Поскольку фазы переключаются скачкообразно в каждой точке коммутации, а вращение ротора является постоянным, существует некоторое изменение крутящего момента (так называемая пульсация крутящего момента) при вращении двигателя.
Для повышения производительности можно использовать другие методы коммутации. Синусоидальная или 180-градусная коммутация постоянно пропускает ток через все три фазы двигателя. Электроника привода генерирует синусоидальный ток через каждую фазу, каждая из которых смещена на 120 градусов относительно другой.Этот метод привода сводит к минимуму пульсации крутящего момента, а также акустический шум и вибрацию и часто используется для высокопроизводительных или высокоэффективных приводов.
Для правильного вращения поля управляющая электроника должна знать физическое положение магнитов на роторе относительно статора. Часто информация о положении получается с помощью датчиков Холла, установленных на статоре. Когда магнитный ротор вращается, датчики Холла улавливают магнитное поле ротора. Эта информация используется электроникой привода для пропускания тока через обмотки статора в такой последовательности, которая вызывает вращение ротора.
Используя три датчика Холла, трапецеидальную коммутацию можно реализовать с помощью простой комбинационной логики, поэтому не требуется сложной управляющей электроники. Другие методы коммутации, такие как коммутация синуса, требуют немного более сложной управляющей электроники и обычно используют микроконтроллер.
Помимо обеспечения обратной связи по положению с помощью датчиков Холла, существуют различные методы, которые можно использовать для определения положения ротора без датчиков. Самый простой — это контролировать обратную ЭДС на незадействованной фазе, чтобы определить магнитное поле относительно статора.Более сложный алгоритм управления, называемый полевым управлением или FOC, вычисляет положение на основе токов ротора и других параметров. FOC обычно требует довольно мощного процессора, так как есть много вычислений, которые нужно выполнять очень быстро. Это, конечно, дороже, чем простой метод трапецеидального управления.
Щеточные и бесщеточные двигатели: преимущества и недостатки
В зависимости от вашего приложения, есть причины, по которым вы можете выбрать бесщеточный двигатель вместо щеточного двигателя.В следующей таблице приведены основные преимущества и недостатки каждого типа двигателя:
| Щеточный двигатель | Бесщеточный двигатель | |
| Срок службы | Короткое (износ щеток) | Длинный (без щеток) |
| Скорость и ускорение | Средний | Высокая |
| КПД | Средний | Высокая |
| Электрический шум | Шумный (искрение втулки) | Тихий |
| Акустический шум и пульсация крутящего момента | Плохо | Среднее (трапециевидное) или хорошее (синусоидальное) |
| Стоимость | Самый низкий | Средний (дополнительная электроника) |
Срок службы
Как упоминалось ранее, одним из недостатков щеточных двигателей является механический износ щеток и коллектора.В частности, угольные щетки являются жертвой, и во многих двигателях они предназначены для периодической замены в рамках программы технического обслуживания. Мягкая медь коллектора также медленно изнашивается щетками и в конечном итоге достигает точки, когда двигатель больше не работает. Поскольку бесщеточные двигатели не имеют подвижных контактов, они не страдают от этого износа.
Скорость и ускорение
Скорость вращения щеточных двигателей может быть ограничена щетками и коллектором, а также массой ротора.На очень высоких скоростях контакт щетки с коммутатором может стать неустойчивым, и искрение щетки возрастет. В большинстве щеточных двигателей также используется сердечник из многослойного железа в роторе, что придает им большую инерцию вращения. Это ограничивает скорость разгона и замедления двигателя. Можно построить бесщеточный двигатель с очень мощными редкоземельными магнитами на роторе, что минимизирует инерцию вращения. Конечно, это увеличивает стоимость.
Электрический шум
Щетки и коммутатор образуют своего рода электрический выключатель.Когда двигатель вращается, переключатели размыкаются и замыкаются, в то время как значительный ток проходит через обмотки ротора, которые являются индуктивными. Это приводит к возникновению дуги на контактах. Это создает большой электрический шум, который может попасть в чувствительные цепи. Возникновение дуги можно несколько смягчить, добавив конденсаторы или демпферы RC на щетках, но мгновенное переключение коммутатора всегда создает некоторый электрический шум.
Акустический шум
Щеточные двигатели имеют «жесткое переключение», то есть ток резко переключается с одной обмотки на другую.Создаваемый крутящий момент изменяется в зависимости от вращения ротора, когда обмотки включаются и выключаются. С помощью бесщеточного двигателя можно управлять токами обмоток таким образом, чтобы ток постепенно передавался от одной обмотки к другой. Это снижает пульсацию крутящего момента, которая представляет собой механическую пульсацию энергии на ротор. Пульсация крутящего момента вызывает вибрацию и механический шум, особенно при низких оборотах ротора.
Стоимость
Поскольку бесщеточные двигатели требуют более сложной электроники, общая стоимость бесщеточного привода выше, чем стоимость щеточного двигателя.Несмотря на то, что бесщеточный двигатель проще в изготовлении, чем щеточный двигатель, поскольку в нем отсутствуют щетки и коммутатор, технология щеточного двигателя является очень зрелой, а производственные затраты низки. Ситуация меняется по мере того, как бесщеточные двигатели становятся все более популярными, особенно в больших объемах, таких как автомобильные двигатели. Кроме того, стоимость электроники, такой как микроконтроллеры, продолжает снижаться, что делает бесщеточные двигатели более привлекательными.
Сводка
Из-за снижения затрат и повышения производительности бесщеточные двигатели становятся все более популярными во многих областях применения.Но все же есть места, где щеточные двигатели имеют больше смысла.
Многое можно узнать, изучив применение бесщеточных двигателей в автомобилях. По состоянию на 2020 год большинство двигателей, которые работают, когда автомобиль работает, — например, насосы и вентиляторы — перешли от щеточных двигателей к бесщеточным двигателям для повышения их надежности. Добавленная стоимость двигателя и электроники более чем компенсирует меньшее количество отказов в полевых условиях и снижение требований к техническому обслуживанию.
С другой стороны, двигатели, которые используются нечасто, например двигатели, приводящие в движение сиденья с электроприводом и электрические стеклоподъемники, остались преимущественно щеточными двигателями.Причина в том, что общее время работы в течение всего срока службы автомобиля очень мало, и очень маловероятно, что двигатели выйдут из строя в течение всего срока службы автомобиля.
По мере того, как стоимость бесщеточных двигателей и связанной с ними электроники продолжает снижаться, бесщеточные двигатели находят свое применение в приложениях, которые традиционно использовались щеточными двигателями. Еще один пример из автомобильного мира: в двигателях регулировки сиденья в высокопроизводительных платах используются бесщеточные двигатели, поскольку они производят меньше акустического шума.
Получить техническую поддержку
Различия между щеточными и бесщеточными двигателями постоянного тока
Я никогда не забуду свой первый инженерный проект, связанный с двигателями. Еще в начальной школе я построил небольшой лифт для класса естественных наук. Конечно, он отлично работал на этапе тестирования, но не работал, когда рассчитывал.
Я использовал дерево, чтобы построить каркас шахты лифта, и я использовал систему шкивов с веревками, чтобы поднимать и опускать картонную коробку.Это было до того, как я узнал о соотношении шестерни и шкивов, поэтому мой лифт был больше похож на сиденье с выталкивателем, чем на лифт.
Для управления движением я использовал в своем проекте аккумулятор, выключатель и двигатель постоянного тока. Поскольку я был так сосредоточен на тестировании, моя батарея фактически разрядилась перед демонстрацией. Оглядываясь назад, я должен был заменить батарею незадолго до демонстрации. Учитель по-прежнему поставил мне оценку «ОК», поскольку кто-то видел, как работает лифт, и поручился за меня.
Это был мой первый опыт работы с двигателем постоянного тока.Сможете угадать, какой тип двигателя постоянного тока я использовал?
Типы двигателей постоянного тока
Есть два типа двигателей постоянного тока — щеточные и бесщеточные. Оба они являются двигателями постоянного тока с постоянными магнитами, поскольку оба используют сегментированный ротор с постоянными магнитами. Эти двигатели обычно используются для управления скоростью.
Драйвер или нет драйвера?
Первое отличие заключается в их названиях. Один использует кисти, а другой нет. Щеточные электродвигатели постоянного тока также известны как электродвигатели постоянного тока с автоматической коммутацией.Его конструкция и конструкция позволяют ему работать без схемы привода, о которой я расскажу позже. Бесщеточные двигатели постоянного тока не могут самостоятельно коммутироваться, поэтому для них требуется схема управления, в которой используются транзисторы для направления тока на различные обмотки двигателя.
Конструкция и работа
Двигатель активирует набор электромагнитов в своем статоре в последовательности, чтобы создать вращение с помощью ротора с постоянными магнитами. Северный полюс статора будет притягивать южный полюс двигателя.Это теория работы всех двигателей постоянного тока с постоянными магнитами. Они делают это иначе.
Чтобы понять, почему эти двигатели ведут себя так, как они, нам нужно понять его конструкцию.
Вот как щеточные моторы и бесщеточные моторы выглядят внутри. На изображении ниже мы показываем щеточный двигатель с постоянными магнитами в статоре вместо ротора. Иногда постоянные магниты могут находиться в роторе в зависимости от производителя. При наличии катушек обмотки в роторе тепло не излучается так же хорошо, как при наличии катушек обмотки в статоре.
На верхнем левом изображении показаны коммутатор и щетки. На нижнем правом изображении показан тот же двигатель спереди. Внутри двигателя установлен электрод в виде щеток и коммутатор. Коммутатор вращается вместе с ротором, а статор неподвижен. В этом моторе два полюса постоянного магнита — северный и южный.
Когда источник питания подключен к стационарным щеткам, в роторе возбуждается определенный набор электромагнитов (катушек), который притягивает следующий полюс магнита и отталкивает текущий полюс статора.Как только ротор вращается к следующему набору электромагнитов, щетки механически переключаются на следующий набор электромагнитов в роторе. Этот процесс повторяется до тех пор, пока не будет отключено питание. Направление двигателя можно изменить, переключив полярность источника питания.
На следующем изображении показан бесщеточный двигатель с постоянными магнитами на роторе вместо статора, который мы делаем. Одним из преимуществ этой конструкции является то, что катушки обмотки статора, которые производят больше всего тепла, могут рассеивать тепло быстрее, чем двигатель с катушками в центре.
На верхнем левом изображении показаны ротор, статор и ИС на эффекте Холла в задней части двигателя. В отличие от щеточных двигателей, бесщеточные двигатели используют специальную схему драйвера для контроля обратной связи от двигателя, а драйвер использует транзисторы для электрического возбуждения полюсов статора для вращения ротора. Они также известны как бесщеточные двигатели постоянного тока или двигатели BLDC. Oriental Motor использует термин «бесщеточные двигатели», поскольку мы предлагаем эти двигатели с входными драйверами переменного или постоянного тока.На нижнем правом изображении показана передняя сторона двигателя. У нас есть 6 полюсов статора (электромагнитов) и 4 полюса ротора (постоянные магниты) в этом двигателе.
ИС на эффекте Холла определяет постоянные магниты в роторе при его вращении, преобразует аналоговый сигнал в цифровой, а затем отправляет данные обратно в схему драйвера. Затем драйвер использует данные, чтобы определить правильную синхронизацию для фазового возбуждения. Обратная связь также используется для регулирования скорости двигателя.
На изображении ниже показано, как силовая цепь драйвера включает и выключает определенные катушки обмотки с помощью транзисторов.Мы показываем 12-ступенчатую последовательность возбуждения транзистора с обмотками U, V и W. После 12 шагов цикл повторяется.
Большинство наших бесщеточных двигателей теперь 10-полюсные. Выходное разрешение ИС на эффекте Холла равно количеству полюсов ротора ИС на эффекте Холла, то есть 3 ИС x 10 полюсов = 30 импульсов на оборот. Некоторые бесщеточные двигатели, такие как серия BXII, предлагают энкодер для приложений, требующих более высокого разрешения.
Обратная связь
Еще одно очевидное различие между щеточными и бесщеточными двигателями заключается в том, что для правильной работы требуется обратная связь. Сигналы обратной связи от его ИС на эффекте Холла предоставляют данные о вращении и необходимы для правильной синхронизации фазового возбуждения.
Усовершенствованные драйверы бесщеточных двигателей могут предлагать некоторые уникальные функции, которые недоступны для простых контроллеров двигателей с щетками, такие как сохраненные профили скорости и связь через RS-485.Датчики обратной связи и тока в бесщеточных двигателях могут обеспечивать функцию ограничения крутящего момента, что может быть полезно для приложений с натяжением. Хотя первоначальные затраты на бесщеточные двигатели выше, при выборе двигателя следует учитывать их преимущества.
Характеристики регулирования скорости
Как щеточные, так и бесщеточные двигатели обладают одинаковой производительностью. Их кривые крутящего момента такие же, как показано ниже. Для щеточных двигателей скорость и крутящий момент можно контролировать, изменяя входное напряжение двигателя.Однако повышенное напряжение иногда может слишком сильно увеличить нагрев и снизить рабочий цикл двигателя.
Драйверы бесщеточного двигателя ограничивают кривую крутящего момента для достижения наилучшей производительности, поэтому вы всегда можете рассчитывать на одинаковую отличную производительность каждый раз. Для бесщеточных двигателей последовательность возбуждения водителя должна увеличиваться, чтобы двигатель вращался быстрее.
Резюме / сравнение
Вы, должно быть, догадались, что в моем проекте лифта я использовал щеточный двигатель.В то время как бесщеточные двигатели лучше, щеточный двигатель выполнил свою работу для моего простого одноразового проекта. К тому же мне действительно нужно было снизить расходы.
Вот краткое изложение различий между щеточными и бесщеточными двигателями.
Хотя щеточные двигатели просты и дешевле в эксплуатации, они обычно используются в приложениях, где длительный срок службы или техническое обслуживание не являются серьезной проблемой. Щетки всегда соприкасаются, поэтому со временем они изнашиваются из-за трения, и их нужно будет периодически заменять.Это может привести к нежелательным изменениям в конструкции, поскольку к двигателям требуется доступ для обслуживания. Единственные компоненты, которые контактируют внутри бесщеточного двигателя, — это шариковые подшипники, поэтому они не требуют периодического обслуживания. Бесщеточные двигатели также тише и служат дольше, чем щеточные двигатели постоянного тока. Щеточная коммутация также является основным источником электрического и звукового шума, который может влиять на другие электронные сигналы или требовать принятия мер по снижению шума. Искры от коммутации щеток ограничивают среду, в которой двигатели с щетками могут безопасно работать.Поскольку бесщеточные двигатели обеспечивают более высокую энергоэффективность, эти двигатели могут быть более компактными из-за высокого отношения крутящего момента к весу и большего крутящего момента на ватт. Наконец, датчики Холла в бесщеточных двигателях регулируют скорость примерно до +/- 0,2%. Для энкодеров это значение составляет + / 0,05%.
Бесщеточные двигатели становятся более популярными, чем щеточные. В то время как щеточные двигатели по-прежнему широко используются в бытовых приборах и автомобилях, бесщеточные двигатели более универсальны для широкого спектра применений, от конвейеров до грузовых автомобилей.
Узнайте больше о преимуществах бесщеточных двигателей в следующем техническом документе.
Вот небольшой ролик про нашу.
Спасибо, что прочитали мой пост. Пожалуйста, подпишитесь, чтобы и дальше получать мои сообщения.
Бесщеточные двигатели | Корпорация Nidec
Технические возможности Nidec
Бесщеточные двигатели постоянного тока отличаются низким энергопотреблением, длительным сроком службы, низким уровнем шума, компактными размерами и малым весом.
Nidec — мировой лидер в разработке и производстве этих высокопроизводительных двигателей.
имеют различные преимущества, такие как высокий КПД, возможность уменьшения габаритов, способность работать на электроэнергии и низкие производственные затраты. Однако эти двигатели имеют ряд недостатков, таких как шум из-за трения щетки, образование искр и электрических шумов, а также ограниченный срок службы из-за износа щетки. Разработка бесщеточного двигателя постоянного тока решила все эти проблемы.
В бесщеточном двигателе постоянного тока ротор, сделанный из постоянного магнита, приводится в движение магнитной силой цепи обмотки статора. В то время как щеточный двигатель постоянного тока использует щетку и коммутатор для переключения тока, бесщеточный двигатель постоянного тока использует датчик и электронную схему для переключения тока. Разработка этого двигателя стала возможной благодаря развитию технологий полупроводников и периферийных устройств. Этот двигатель имеет выгодные характеристики двигателей постоянного тока (ток и напряжение соответственно пропорциональны крутящему моменту и скорости вращения) и двигателей переменного тока (бесщеточная конструкция).Бесщеточный двигатель постоянного тока отличается компактными размерами, высокой мощностью, длительным сроком службы и отсутствием искр и шума. Он используется в широком спектре приложений, от ПК до бытовой техники.
Характеристики и классификация бесщеточных двигателей постоянного тока
Бесщеточный двигатель постоянного тока «вращает свой магнит».
Ротор, сделанный из магнита, вращается под действием магнитных полей, создаваемых током, протекающим через обмотки статора. Ток переключается датчиком и электронной схемой.
Тип внешнего ротора (ротор находится вне статора)
- Преимущества
- Легко получить большой крутящий момент.
- Скорость стабильна при постоянном вращении.
- Недостатки
- Ротор большой (движение медленное).
- Внешний ротор требует соответствующих мер безопасности.
Тип внутреннего ротора (ротор находится внутри статора)
- Преимущества
- Ротор маленький и быстро реагирует.
- Змеевик расположен снаружи, и уровень теплоотдачи высокий.
- Недостатки
- Трудно получить большой крутящий момент.
- Магниты могут быть повреждены центробежной силой.
Таблица сравнения типов двигателей
Бесщеточные двигатели постоянного тока имеют много преимуществ (в частности, в области эффективности).
По сравнению с другими типами двигателей, бесщеточный двигатель постоянного тока имеет множество преимуществ, таких как компактный размер, высокая мощность, низкий уровень вибрации, низкий уровень шума и длительный срок службы.
| Двигатель переменного тока | Универсальный мотор | Щеточные электродвигатели постоянного тока | Бесщеточный двигатель постоянного тока | Шаговый двигатель | Серводвигатель | ||||
|---|---|---|---|---|---|---|---|---|---|
| Однофазный | Трехфазный (Индукционный) | Трехфазный (Синхронизация) | серв. Переменного тока | сервопривод постоянного тока | |||||
| Тип питания | AC | AC / DC | DC | DC (включая драйвер) / Driver | Драйверы | Драйверы | Драйверы | ||
| КПД | 40-60 % | 60–70 % | 70-80 % | 50-60 % | 60–80 % | 80 % — | 60–70 % | 50–80 % | 60–80 % |
| Типоразмер (та же мощность) | Большой | Средний или большой | Большой | Маленький | Маленький | Средний | Малый или средний | Маленький | |
| Шум | Малый | Большой | Большой | Маленький | Средний | Маленький | Большой | ||
| Диапазон скоростей | Узкий | широкий | Средний | широкий | широкий | широкий | Средний | Узкий | |
| Ответ | Медленная | Медленная | Средний | Средний | Средний | Быстро | |||
| Срок службы | длинный | Короткий | Короткий | длинный | длинный | Короткий | |||
| Цена | Низкий | Средний | Низкий | Низкий | Средний или высокий | Средний | Высокая | ||
| Приложения | Стиральные машины Воздуходувки Пылесосы Насосы | Краны Конвейеры Кондиционеры Промышленное оборудование | Компрессоры Посудомоечные машины Стиральные машины | Пылесосы Электроинструменты Соковыжималки | Электрические игрушки Электроинструменты Автомобильные электрические компоненты Мелкая бытовая техника | Кондиционеры Посудомоечные машины Стиральные машины Мелкая бытовая техника | Роботы Мелкая бытовая техника Кондиционирование воздуха | Конвейеры Роботы Станки | Принтеры Плоттеры Рабочие машины |
| Решение | Ориентация на затраты | Ориентация на универсальность | Ориентация на затраты | Ориентация на затраты | Ориентация на эффективность Ориентация на универсальность | Ориентация на универсальность | Ориентация на производительность | ||
Nidec имеет значительный опыт в области небольших бесщеточных двигателей постоянного тока.Компания занимает 80% мирового рынка шпиндельных двигателей для жестких дисков, 60% мирового рынка двигателей для DVD и других оптических приводов и 40% мирового рынка двигателей для вентиляторов. Nidec работает в области малых прецизионных двигателей, которая наиболее быстро перешла на бесщеточные двигатели. Нам удалось наладить массовое производство бесщеточных двигателей постоянного тока раньше, чем у конкурентов, и занять лидирующие позиции на рынке. Кроме того, мы удерживаем позицию № 1 в мире, постоянно внедряя новые технологии, такие как первые в отрасли подшипники FDB (гидродинамические подшипники), которые удовлетворяют потребности во все более точных жестких дисках, а также наши собственные разработки. средств проектирования и моделирования.
Рынок, который становится наиболее плодородным с точки зрения применения бесщеточных двигателей постоянного тока, — это рынок автомобильных двигателей. Как свидетельствует система гидроусилителя рулевого управления, уровень расхода топлива которой можно улучшить на 3-5%, если гидравлическую систему заменить электрической системой, эффект энергосбережения очень высок за счет использования систем электроснабжения. В разных местах все больше и больше гидравлических систем заменяется двигателями. В частности, бесщеточный двигатель постоянного тока играет ведущую роль в замене функций там, где требуется управляемость и где детали часто используются и, следовательно, требуются детали с длительным сроком службы.Основная область применения после гидроусилителя руля — компрессорные моторы кондиционеров. Кроме того, тяговые двигатели для электромобилей (электромобилей) являются многообещающей областью для бесщеточных двигателей постоянного тока. Поскольку система работает от батареи с ограниченной мощностью, двигатель должен быть высокоэффективным и компактным, чтобы его можно было устанавливать в ограниченном пространстве. Благодаря накопленному нами к настоящему времени опыту в области малых прецизионных двигателей, мы стремимся стать компанией № 1 в мире, работающей в области автомобильных двигателей.
Рынок автомобильных компонентов значительно расширяется как область применения бесщеточных двигателей постоянного тока.Решено: что означает «бесщеточный двигатель»? Бесщеточные двигатели
дороже в производстве, чем их аналоги, но их преимущества перевешивают первоначальную стоимость. (DepositPhotos)Последним достижением в электроинструментах является использование бесщеточных двигателей. Но что такое бесщеточный двигатель и в чем его преимущества?
Чтобы полностью понять эту технологию, давайте кратко рассмотрим существующую технологию: щеточные двигатели.
Как работают щеточные двигатели
В обычном электродвигателе есть постоянные магниты (статор) снаружи и вращающийся якорь (ротор) внутри. Ротор содержит электромагнит. Когда электричество проходит через электромагнит, внутри ротора создается магнитное поле, которое притягивает и отталкивает постоянные магниты в статоре.
Однако, чтобы двигатель вращался на 360 градусов, необходимо изменить полярность электромагнита, и пара щеток помогает в этом.
Моторные щетки — это вовсе не щетки, а небольшие угольные блоки, соединенные с пружиной сжатия. Щетки давят на вращающиеся электроды, прикрепленные к ротору. Когда электромагнит вращается, щетки меняют магнитную полярность.
Щеточные двигатели надежны, относительно эффективны и недороги в производстве, но у них есть явные ограничения.
Во-первых, угольные щетки со временем изнашиваются и требуют замены. Во время работы двигателя щетки постоянно ломаются, а затем вступают в электрический контакт, что вызывает искрение и шум.
Трение, вызванное трением щеток о вращающийся ротор, приводит к увеличению нагрева двигателя. А щетки ограничивают максимальную скорость двигателя.
По этим и другим причинам все основные производители инструментов теперь добавили бесщеточные двигатели в свою линейку портативных электроинструментов.
Щеточный или бесщеточный двигатель
В бесщеточном двигателе нет щеток любого типа, а сам двигатель вывернут наизнанку: постоянные магниты перемещены к ротору, а электромагниты подключены к статору.
Затем вместо щеток компьютер, подключенный к мощным транзисторам, заряжает электромагниты при вращении двигателя.
Бесщеточный двигатель имеет множество преимуществ. Например, нет щеток, которые нужно изнашивать или заменять, двигатель работает тише и холоднее, отсутствуют электрические искры, а время работы аккумуляторных инструментов увеличивается на 50 процентов по сравнению с аналогичным щеточным двигателем.
Кроме того, поскольку бесщеточный двигатель имеет электронное управление, он обеспечивает точное количество энергии, необходимое для работы.
Например, двигатель может определить, просверливаете ли вы отверстие диаметром ¼ дюйма в гипсокартоне или отверстие диаметром 2 дюйма в стальной двери, и затем выдать нужный крутящий момент (мощность).
Напротив, щеточные двигатели работают на максимальной скорости независимо от выполняемой работы.
Итог
Хорошо, на этом этапе я уверен, что вы думаете, что бесщеточные двигатели — это просто невероятно; должна быть уловка.
Что ж, здесь точно нет подвоха, но производство бесщеточных двигателей стоит дороже, чем производство традиционных щеточных двигателей.
Однако первоначальные затраты часто окупаются за счет большей эффективности и увеличения срока службы инструмента.
По мере того, как бесщеточные двигатели становятся все более распространенным явлением, цены в конечном итоге снизятся.
В чем разница между щеточными и бесщеточными двигателями постоянного тока?
Вот обзор факторов, которые необходимо учитывать при выборе между щеточным или бесщеточным двигателем постоянного тока.
Карстен Хорн, Максон Мотор
Maxon Motor: щеточные двигатели постоянного тока (слева) и бесщеточные (справа) [Изображение любезно предоставлено Maxon Motor]
Основное различие между щеточными и бесщеточными двигателями заключается в сроке службы.Срок службы щеточного двигателя короче и ограничен из-за износа щеток, тогда как у бесщеточного двигателя износ шарикоподшипников гораздо более постепенный.Для многих применений более короткий срок службы щеточного двигателя не вызывает беспокойства, потому что он более чем компенсируется более низкой стоимостью. Срок службы может составлять от 100 до 10 000 часов в зависимости от таких факторов, как текущая нагрузка, скорость, вибрация и частота реверсирования, в среднем около 2 000 часов. С другой стороны, бесщеточный двигатель может обеспечить несколько десятков тысяч часов службы.
Еще одно соображение — скорость. Обычно максимальная скорость щеточных двигателей составляет 20000 об / мин, но в этом диапазоне электрический и механический износ резко возрастает, что значительно сокращает срок службы. На практике щеточные двигатели обычно работают со скоростью менее 10 000 об / мин. Бесщеточный двигатель аналогичного размера и магнитной конструкции может работать на гораздо более высоких скоростях, в некоторых случаях достигая 100 000 об / мин. Это идеальные двигатели для приложений, где скорость имеет решающее значение.
Но это обобщения.Чтобы получить точную информацию о возможностях скорости и крутящего момента, вам необходимо ознакомиться с техническими данными каждого двигателя.
Еще одним фактором являются условия окружающей среды. Если вас беспокоят электромагнитные помехи, двигатели щеток могут не подходить из-за явления, называемого возгоранием щеток. Во взрывоопасной газовой среде искры от щеток представляют собой серьезную проблему. Щетки из графита нуждаются в влажности и кислороде в атмосфере для правильной работы и производят пыль, которая может загрязнять чистые комнаты, высокий вакуум или оптические устройства.
По этим причинам большинство двигателей в особых условиях окружающей среды являются бесщеточными. Отсутствуют физические остатки щеток или искры. Бесщеточные двигатели не являются взрывобезопасными по своей природе, но могут быть легко изготовлены с помощью специальных модификаций. Их можно стерилизовать, эксплуатировать в условиях сверхвысокого вакуума, требующего предварительного нагрева, и поэтому они идеально подходят для использования в медицине. Бесщеточные двигатели также могут выдерживать высокие уровни вибрации и температуры.
Нет двигателя более простого в эксплуатации, чем щеточный двигатель постоянного тока — просто подайте напряжение, и двигатель начнет вращаться.Бесщеточный двигатель требует электронного контроллера и дополнительных кабелей, что увеличивает сложность и стоимость. Но это преимущество сводится на нет в приложениях, требующих более высоких уровней управления, где как щеточные, так и бесщеточные двигатели требуют контроллеров для скорости двигателя, положения вала или обратной связи по крутящему моменту.
Итак, щеточный или бесщеточный, в конце концов, вы должны сделать выбор, исходя из скорости, срока службы, сложности установки и требований окружающей среды для вашего конкретного приложения.
Карстен Хорн (Carsten Horn) — инженер по развитию медицинского оборудования в компании Maxon Precision Motors, ведущем поставщике высокоточных приводов и систем.Хорн изучал физику и мехатронику в своей родной Германии. Он возглавлял группу исследований и разработок по управлению продуктами в Maxon Germany и сосредоточился на разработке компонентов для медицинских устройств. Хорн сейчас проживает в США.
Бесщеточный Vs. Матовые двигатели | KDE Direct News Release
Неудивительно, что самая большая разница между щеточными и бесщеточными двигателями — это щетка. Но что это на самом деле означает?
Принцип внутренней работы щеточных и бесщеточных двигателей в остальном во многом одинаков.Когда обмотки двигателя находятся под напряжением, создается временное магнитное поле, которое отталкивает или притягивает постоянные магниты. Эта магнитная сила преобразуется во вращение вала, позволяя двигателю выполнять работу. Когда вал вращается, электрический ток направляется к разным наборам обмоток, поддерживая электродвижущее отталкивание или притяжение, заставляя ротор непрерывно вращаться.
История щеточных и бесщеточных двигателей
Щеточные двигатели постоянного тока используются с 1856 года и до сих пор часто используются в электрических силовых установках, подъемных кранах, бумагоделательных машинах и сталепрокатных станах.Однако, поскольку их щетки изнашиваются и требуют частой замены, бесщеточные двигатели постоянного тока с электронными регуляторами скорости вытеснили щеточные двигатели во многих областях применения. Износ щеток стал существенным недостатком из-за высоких требований к применению и высокого уровня шума электрического разряда (также известного как электростатический разряд, особенно в аэрокосмической отрасли), и родился новый двигатель.
Бесщеточные двигатели значительно новее и были изобретены во время появления инноваций в электронике. Достижения в твердотельной технологии в начале 1960-х годов привели к изобретению первого бесщеточного двигателя постоянного тока (BLDC) в 1962 году, который Т.Г. Уилсон и П. Трики назвал «машину постоянного тока с твердотельной коммутацией». Ключевым элементом бесщеточного двигателя является то, что он не требует физического коммутатора, что делает его наиболее популярным выбором для компьютерных дисководов, робототехники и самолетов.
Преимущества бесщеточного двигателя
Поскольку бесщеточные двигатели постоянного тока не имеют щеток, которые могут изнашиваться, они представляют собой огромный шаг вперед в развитии технологий. Бесщеточные двигатели имеют значительно более высокий КПД и производительность, а также меньшую подверженность механическому износу, чем их щеточные аналоги.
Бесщеточные двигателиобладают рядом других преимуществ, в том числе:
- Более высокое отношение крутящего момента к массе
- Увеличенный крутящий момент на ватт потребляемой мощности (повышенная эффективность)
- Повышенная надежность и меньшие требования к техническому обслуживанию
- Пониженный рабочий и механический шум
- Более длительный срок службы (отсутствие эрозии щеток и коллектора)
- Устранение ионизирующих искр от коллектора (ESD)
- Практически исключение электромагнитных помех (EMI)
Современные бесщеточные двигатели
Несмотря на их надежность, первоначальным недостатком ранних бесщеточных двигателей было то, что они не могли генерировать большую мощность.Когда в 1980-х годах стали доступны более качественные материалы с постоянными магнитами, они позволили бесщеточным двигателям вырабатывать столько же (или больше) мощности, что и предыдущие щеточные двигатели, представленные на рынке. В конце 80-х Роберт Э. Лордо построил первый крупномасштабный бесщеточный двигатель постоянного тока, мощность которого в десять (10) раз превышала мощность более ранних бесщеточных двигателей.
Современные бесщеточные двигатели устраняют многие ограничения щеточных двигателей за счет сочетания более высокой выходной мощности, меньшего размера и веса, лучшего рассеивания тепла и эффективности, более широкого диапазона рабочих скоростей и очень низкого электрического шума.Бесщеточные двигатели не имеют электрических контактов, рассчитанных на износ, что обеспечивает наибольшее преимущество в надежности и сокращении интервалов технического обслуживания для коммерческих и промышленных применений.
Бесщеточные двигатели прямого действия KDE
Бесщеточные двигатели KDE Direct, спроектированные и спроектированные в США, обеспечивают лучшую в своем классе мощность, производительность и эффективность. Двигатели KDE Direct разработаны с учетом стандартов избыточности конструкции и отказоустойчивости до грузоподъемности и тяговых характеристик — они рассчитаны на более длительное время полета, более высокую эффективность и более высокую полезную нагрузку, что раздвигает границы современных технологий.