Частота асинхронного генератора. Формулы. Расчёт. Теория
Частота асинхронного генератора при холостом ходе и нагрузке
Разница между частотой вращения магнитного поля и ротора в асинхронных генераторах определяется коэффициентом s, называемым скольжением, который выражается соотношением:
s = (n — nr )/n .
Здесь:
n — частота вращения магнитного поля.
nr — частота вращения ротора.
Связь между угловой частотой вращения магнитного поля ω и угловой частотой вращения ротора ωr асинхронной машины можно выразить следующим образом:
ω = ωr /(1 — s) ,
что следует из определения скольжения.
В общем случае угловая частота вращения магнитного поля
ω = 2πn .
Так как частота генерируемых колебаний
f = pn ,
где р — число пар полюсов, то
ω = 2πf/p .
Аналогично угловая частота вращения ротора
ωr = 2πnr или ωr = 2πfr /p ,
где fr = pnr — электрическая частота вращения ротора.
Электрическая угловая частота вращения ротора
ωr p = 2πfr
В режиме автономного асинхронного генератора частота вращения магнитного поля, определяющая частоту генерируемых колебаний, зависит от частоты вращения ротора и от нагрузки, характеризуемой скольжением. Если нагрузка отсутствует, а включенная емкость и частота вращения ротора остаются постоянными, т.е. C = cоnst и ωr = cоnst, то частоту генерируемых колебаний можно выразить через параметры колебательного контура, который образуется собственной индуктивностью статорной обмотки и емкостью конденсатора.
При отмеченных условиях уравнение электрического равновесия, выраженное через мгновенные значения напряжений на синхронном индуктивном сопротивлении XL = ωL и на конденсаторе XC = ωC, принимает вид:
uL + uC = 0 .
После подстановок:
uL = Ldi/dt и di/dt = C d 2u/dt 2
где
i = C duC /dt ,
и преобразований, уравнение примет вид
d 2uC /dt 2 + uC /LC = 0
Примем, что напряжение на конденсаторе изменяется по синусоидальному закону:
uC = UC sinωt ,
тогда
d
С учетом последних соотношений из дифференциального уравнения находим:
ω = 1/√LC ,
откуда
f = 1/2π√LC
Таким образом, частота генерируемых колебаний при холостом ходе автономного асинхронного генератора определяется из условия резонанса емкости конденсатора и собственной индуктивности обмотки статора.
Если принять, что при холостом ходе скольжение s = 0, то получим
ω ≈ ωr
Тогда
f ≈ pnr = fr
Последнее выражение можно представить в виде
fr ≈ 1/2π√LC
Следовательно, при холостом ходе асинхронного самовозбуждающегося генератора параметры колебательного контура автоматически настраиваются на частоту, равную электрической частоте вращения ротора.
Изменение значения включенной емкости при ωr = cоnst или частоты вращения ротора при С = cоnst не нарушает вышеописанных равенств, если генератор остается в области устойчивой работы. В первом случае мы имеем одну характеристику намагничивания машины, соответствующую данному значению частоты вращения и семейство вольтамперных характеристик возбуждающей емкости, причем каждая из характеристик составляет с положительным направлением оси абсцисс угол
αk = arctg(1/ωCk ) ,
где k = 1, 2, 3 . ..
Произведение собственных индуктивностей статорной обмотки и емкости конденсаторов остается практически постоянным, т.е.
..
Произведение собственных индуктивностей статорной обмотки и емкости конденсаторов остается практически постоянным, т.е.
LkCk = cоnst ,
так как вследствие нелинейности кривой намагничивания происходит соответствующее изменение индуктивности. Так с увеличением емкости ток холостого хода и степень насыщения магнитной цепи возрастают, а индуктивность уменьшается. Значение установившегося напряжения определяется точкой пересечения кривой намагничивания и вольтамперной характеристики конденсаторов.
Во втором случае, т.е. при переходе к новым значениям установившихся частот вращения с емкостью С = cоnst, мы имеем семейство кривых намагничивания и семейство вольтамперных характеристик возбуждающей емкости. Углы наклона последних к положительному направлению оси абсцисс находятся теперь по соотношению
αk = arctg(1/ωC) ,
Значение установившегося напряжения в каждом случае определяется точкой пересечения кривой намагничивания и вольтампер ной характеристики конденсаторов для данной угловой частоты ωk .
Получим теперь выражение для частоты генерируемых колебаний при нагрузке, полагая, что емкость конденсаторов и частота вращения ротора не изменяются. Выполнив необходимые преобразования из вышеописанных формул, получим:
f = fr /(1 — s ) ,
или
f = pnr /(1 — s ) ,
Заметим, что частота вращения ротора в большинстве случаев выражается в об/мин а не в сек/мин, тогда запишем
f = pnr /60(1 — s ) ,
Частота генерируемых колебаний при постоянной частоте вращения ротора и возрастающей нагрузке несколько уменьшается, так как на устойчивой части механической характеристики асинхронной машины скольжение пропорционально нагрузке. С другой стороны, уменьшение частоты
 Последнее вызывается размагничивающим действием тока ротора.
Последнее вызывается размагничивающим действием тока ротора.
Продолжение следует.
Ещё статьи для ознакомления:
Синхронный и асинхронный генератор. Отличия.
Асинхронный генератор. Характеристики.
Дизель-генераторы.
Замечания и предложения принимаются и приветствуются!
Регулирование частоты вращения асинхронных двигателей
Страница 17 из 51
Асинхронные двигатели являются основой современного электропривода переменного тока. Эффективность работы этого электропривода во многом определяется возможностями регулирования частоты вращения.
Возможности асинхронных двигателей в отношении регулирования частоты вращения ротора определяются выражением
Из этого выражения следует, что частоту вращения можно регулировать тремя способами: путем изменения частоты , числа пар полюсов p и скольжения s. Рассмотрим каждый из этих способов подробнее.
Регулирование частоты вращения изменением частоты подводимого напряжения
Этот способ является в настоящее время наиболее перспективным. Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение с потоком Ф,
Изменение частоты осуществляется с помощью полупроводникового преобразователя частоты (рис. 4.28, а). Одновременно с изменением частоты регулируют и напряжение , так чтобы обеспечить постоянство магнитного потока . Из выражения, связывающего напряжение с потоком Ф,
,
следует, что напряжение необходимо регулировать пропорционально частоте
.
Отклонение от этого закона приводит к изменению потока Ф, что нежелательно. Действительно, при увеличении потока возрастает насыщение магнитной цепи, растут потери в стали и намагничивающий ток. Уменьшение потока вызывает уменьшение максимального момента двигателя и ряд других нежелательных явлений.
 Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.
Однако стоимость этого способа регулирования частоты вращения двигателя весьма высока, так как преобразователь частоты должен быть выполнен на полную мощность двигателя.Регулирование частоты вращения изменением числа пар полюсов
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:
.
Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора.
Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет полюса. Мощность обмотки остается неизменной, , а момент, развиваемый двигателем, снижается в два раза, . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки возрастает в два раза, а момент двигателя остается постоянным .
Таким образом, для изменения числа пар полюсов в отношении необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом . Тогда при меньшем числе полюсов .
Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом и с постоянной мощностью . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя , момент же при этом не меняется.
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
Регулирование частоты вращения изменением скольжения
Изменять скольжение асинхронного двигателя можно разными способами: изменением подводимого к статору напряжения, введением сопротивления в цепь ротора или введением в цепь ротора дополнительной ЭДС.
При изменении напряжения статора механическая характеристика двигателя изменяется, как показано на рис. 4.33. Снижение напряжения приводит к уменьшению жесткости механической характеристики и росту скольжения. При этом частота вращения ротора снижается,
.
Регулирование частоты вращения таким способом возможно в ограниченном диапазоне изменения скольжения
.
Основным недостатком этого способа регулирования частоты вращения является низкий КПД из-за роста потерь в обмотке ротора пропорционально частоте скольжения
.
Поэтому он применяется только для двигателей малой мощности, работающих в системах автоматического управления.
В двигателях с фазным ротором изменить частоту вращения можно путем изменения сопротивления в роторе (рис. 4.34).
Преимущество данного способа регулирования частоты состоит в том, что максимальный момент остается неизменным. Важно также отметить, что часть потерь двигателя выносится в резистор, тем самым облегчается тепловой режим двигателя. В остальном способ аналогичен предыдущему и характеризуется низким КПД., малым диапазоном регулирования, зависящим от нагрузки, и «мягкой» механической характеристикой.
Чтобы повысить КПД двигателя при регулировании частоты вращения путем изменения скольжения, необходимо мощность скольжения использовать для совершения полезной работы или возвратить обратно в сеть. Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схемы, реализующие эту идею, называются каскадными. Одной из распространенных схем данного типа является схема асинхронно-вентильного каскада (рис. 4.35).
Схема включает асинхронный двигатель с фазным ротором (АД), диодный выпрямитель (Д), сглаживающий дроссель (Др), тиристорный инвертор (И) и сетевой согласующий трансформатор (Тр). Регулирование частоты вращения осуществляется посредством изменения напряжения инвертора. Это приводит к соответствующему изменению напряжения обмотки ротора, а следовательно, и частоты вращения ротора. Мощность частоты скольжения, извлекаемая из роторной обмотки двигателя, передается в сеть через согласующий трансформатор.
Достоинством каскадных схем регулирования частоты вращения асинхронных двигателей по сравнению с частотными схемами управления в статорной цепи (рис. 4.28) является то, что полупроводниковый преобразователь выполняется на мощность скольжения, а не на полную мощность двигателя. Это обстоятельство особенно важно для мощных и сверхмощных приводов насосов, прессов, конвейеров, подъемных механизмов и др. , где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
, где требуется ограниченный диапазон регулирования частоты вращения (2:1 и менее).
Асинхронно-вентильный каскад с неуправляемым выпрямителем допускает регулирование только вниз от синхронной частоты вращения. Если использовать управляемый выпрямитель, то можно осуществить регулирование частоты вращения вверх от синхронной. В этом случае направление передачи мощности скольжения меняется на противоположное.
§81. Регулирование частоты вращения асинхронных двигателей
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
Рис. 266. Схема переключения катушек обмотки статора (одной фазы) для изменения числа полюсов: а — при четырех полюсах; б — при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис.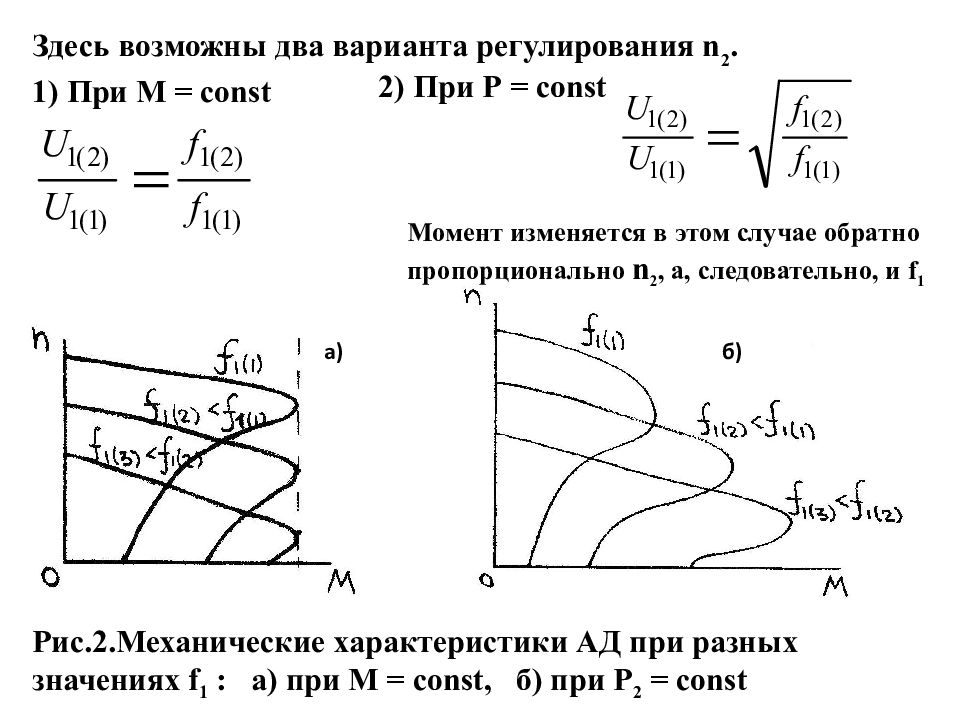 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
Рис. 267. Механические характеристики двухскоростных асинхронных двигателей с постоянным наибольшим моментом (а) и постоянной мощностью (б)
Рис.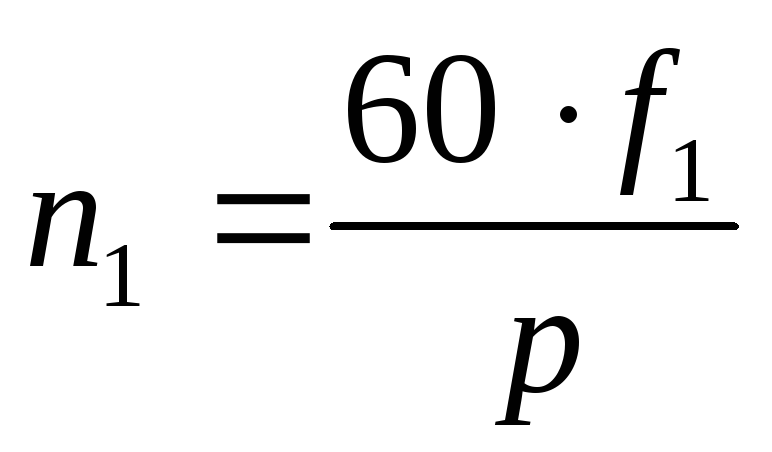 268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
268. Механические характеристики асинхронного двигателя при регулировании частоты вращения путем включения реостата в цепь обмотки ротора
Рис. 269. Схемы подключения асинхронного двигателя к сети при изменении направления его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
Асинхронный двигатель
Если поместить во вращающееся магнитное поле короткозамкнутую медную или алюминиевую рамку на валу электродвигателя, то она вместе с валом придет во вращение по направлению вращения поля. Явление это объясняется следующим образом. Пусть угловая скорость вращения рамки n несколько меньше угловой скорости вращения поля no (асинхронное вращение). В этом случае рамка «проскальзывает» относительно поля. Величину s = (n0—n)/n0 называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
Величину s = (n0—n)/n0 называют скольжением. Относительно магнитного поля рамка вращается с угловой скоростью, пропорциональной скольжению. Поэтому в ней возникает индукционный ток, пропорциональный относительной скорости вращения рамки, т. е. скольжению. По закону Ленца, индуцированный ток взаимодействует с полем так, что рамка увлекается полем.
А так как магнитное поле вращается, то это приводит к вращению рамки. Вращающий момент, действующий на рамку, пропорционален индуцированному току и тем самым скольжению. Этот вращающий момент уравновешивается внешней нагрузкой. Таким образом, в установке данного типа рамка всегда вращается несколько медленнее вращения поля. Такое вращение называют асинхронным (т. е. неодновременным, несогласованным). Сам двигатель получил название асинхронного.
Асинхронный двигатель наиболее распространен в качестве электропривода различных механизмов благодаря своей простоте и надежности. Их применяют для привода машин и механизмов, не требующих строго постоянной частоты вращения и ее регулировки. Важнейшими достоинствами данного двигателя являются простота его устройства и большая надежность, вызванная отсутствием скользящих контактов. Двигатель имеет достаточный пусковой момент, легко реверсируется (т. е. в нем легко меняется направление вращения ротора). В результате этого асинхронные двигатели являются самыми распространенными в технике электрическими машинами. Более 60 % всей вырабатываемой в мире энергии преобразуется в механическую, в основном, с помощью асинхронных двигателей. Мощность двигателей колеблется от десятков ватт до сотен киловатт.
Асинхронный двигатель изготавливается в однофазном, двухфазном и трехфазном исполнении.
Принцип работы
Рассмотрим вращающееся поле переменного тока трехфазной цепи короткозамкнутого асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° и соединенными звездой .
Обмотки статора питаются симметричным трехфазным напряжением. Начальную фазу тока в обмотке А-х принимаем равной нулю. Тогда:
Конструкция
Асинхронный двигатель состоит из статора и ротора. Статор представляет собой литой корпус (стальной или чугунный) цилиндрической формы. Внутри статора располагается магнитопровод с вырубленными пазами, в которые укладывается статорная обмотка. Концы обмоток выводятся в клеммную коробку и могут быть соединены как треугольником, так и звездой. Корпус статора с торцов закрыт подшипниковыми щитами, в которые запрессовываются подшипники вала ротора. Ротор состоит из стального вала с напрессованным на него магнитопроводом.
По конструкции роторов двигатели делятся на две группы. Первая — с короткозамкнутым ротором и вторая — с фазным. У двигателя с короткозамкнутым ротором в пазы заливаются алюминиевые стержни и накоротко замыкаются по торцам. У фазового ротора имеются три обмотки, соединенные в звезду. Выводы обмоток присоединены к кольцам, закрепленным на валу. К кольцам при пуске прижимаются неподвижные щетки, к которым подключаются сопротивления. В начальный момент пуска ротор находится в заторможенном состоянии, затем сопротивление уменьшается и двигатель плавно запускается, что позволяет снизить пусковой ток.
К обмоткам статора подводится трехфазное напряжение, а ротор вращается посредством вращающегося магнитного поля, создаваемого системой трехфазного тока.
В момент времени t1: . Если ток фазы А положителен, т.е. течет от начала к концу, то, пользуясь правилом правоходового винта, можно найти картину распределения магнитного поля для времени t1.
В момент времени t2 вектор результирующей магнитной индукции Вm развернется на угол α1 и далее по часовой стрелке с периодом обращения 360°. Для данного примера угол α1 = 60°.
Таким образом, магнитная индукция представляет собой вращающееся поле с амплитудой
За период поле делает один оборот, , (где f = 50 Гц), и является промышленной частотой питающего переменного напряжения и тока.
При синусоидальном характере вращающегося поля его скорость no равна отношению αf/p (где р — число пар полюсов). В рассматриваемом примере р = 1 и частота вращения равна соответственно 3000 оборотам в минуту. Если число катушек в каждой фазе увеличить в два раза, а сдвиг фаз между токами сохранить 120°, то частота вращения уменьшится в два раза за счет увеличения числа пар полюсов. Особенностью короткозамкнутого асинхронного двигателя является наличие постоянной частоты вращения поля статора, определяемой числом пар полюсов.
Если поменять местами любые две фазы, то возникнет поле обратной последовательности и ротор начнет вращаться в другую сторону. Еще одной особенностью асинхронных двигателей является разность частоты вращения полей статора no и ротора n, что делает возможным их электромагнитное взаимодействие. При этом поле ротора будет как бы скользить относительно поля статора
где s — скольжение, при номинальной мощности двигателя скольжение составляет 0,01-0,03.
Основное вращающееся магнитное поле индуцирует в обмотках статора и ротора ЭДС, аналогично трансформатору, так как при разомкнутом роторе асинхронный двигатель представляет собой трансформатор в режиме холостого хода:
где индекс 1 относится к параметрам статора, а 2 — к параметрам ротора; Kобм — обмоточные коэффициенты, определяемые способом укладки обмоток (петлевая или волновая). Kобм=0,92-0,98; E2s=E2s; E2 — действующее значение ЭДС неподвижного ротора при s = 1; f2=f1s.
В асинхронном двигателе кроме основного магнитного потока создаются потоки рассеяния. Один охватывает проводники статора, другой — ротора. Потоки рассеяния характеризуются соответствующими индуктивными сопротивлениями X1 и X2s.
Уравнения электрического состояния фаз обмоток статора и ротора:
Момент асинхронного двигателя
Вращающий электромагнитный момент двигателя в соответствии с законом электромагнитных сил
где
Cм — конструктивная постоянная;
φ2s — фазовый сдвиг между током и магнитным потоком.
Отношение максимального момента Mmax к номинальному Mн определяет перегрузочную способность двигателя и составляет 2,0-2,2 (дается в каталожных данных). Максимальный момент соответствует критическому скольжению sк, определяемому активными и индуктивными сопротивлениями двигателя, и пропорционален активному сопротивлению цепи ротора.
Потери в асинхронном двигателе
Потери делятся на потери в статоре и в роторе. Потери в статоре состоят из электрических потерь в обмотке Рэ1 и потерь в стали Рст, а потери в роторе — из электрических Рэ2 и механических Рмех плюс добавочные потери на трение и вентиляцию Рдоб.
где К = 2,9-3,6 определяется диаметром статора D1.
Потери в стали в рабочем режиме во много раз меньше электрических потерь в роторе и ими обычно пренебрегают.
КПД асинхронного двигателя составляет от 0,75 до 0,95.
Рабочий момент двигателя пропорционален квадрату напряжения, что необходимо учитывать при включении двигателя в протяженных распределительных сетях. Номинальному моменту соответствует номинальное скольжение, а пусковому — sп.
Зависимость момента двигателя от скольжения М=f(s) приведена на рисунке.
На участке от 0 до Mmax двигатель работает в устойчивом режиме, а участок от Sk называется режимом опрокидывания двигателя, при котором двигатель в результате перегрузки останавливается и не может вернуться в рабочий режим без очередного запуска. Пусковые свойства двигателя определяются соотношением пускового момента Mп и номинального. В соответствии с каталожными данными оно составляет 1,6-1,7. При пуске асинхронного двигателя cosj очень мал и пусковой ток в обмотке статора может возрастать в 5-7 раз по сравнению с номинальным. Ограничение его осуществляется изменением частоты питающего напряжения для двигателя с короткозамкнутым ротором и увеличением активного сопротивления в цепи ротора для двигателя с фазовым ротором. Для механизмов, имеющих тяжелые условия пуска, где желательно использовать асинхронный двигатель с короткозамкнутым ротором, применяются двигатели с улучшенными пусковыми свойствами: с большим пусковым моментом и меньшим пусковым током, чем у двигателей общего назначения.
Механическая характеристика асинхронного двигателя
Зависимость скорости вращения от нагрузки на валу двигателя называется механической характеристикой асинхронного двигателя.
Участок АВ механической характеристики соответствует устойчивому режиму работы асинхронного двигателя. Увеличение нагрузки (тормозного момента) ведет к некоторому снижению частоты вращения ротора, что вызывает увеличение вращающего момента. При превышении тормозным моментом критического, двигатель останавливается. Точка В на графике соответствует точке критического или опрокидывающего момента.
Регулирование частоты вращения
Регулирование частоты вращения может быть осуществлено тремя способами: изменением частоты питающего напряжения, переключением числа пар полюсов и изменением скольжения.
Для регулирования частоты вращения двигателей с короткозамкнутым ротором в настоящее время широко используются частотные преобразователи с микропроцессорным управлением.
Тормозные режимы
Тормозные режимы возникают в машине при определенных условиях или создаются искусственно с целью ускорения процесса остановки двигателя. Торможение может быть:
- генераторное с отдачей энергии в сеть;
- противовключением;
- динамическое.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей скоростью.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля.
Динамический тормозной режим получается при отключении обмотки статора от сети трехфазного тока и подключении ее на время торможения к источнику энергии постоянного тока.
Выбор двигателя
Расчетные формулы для выбора двигателя имеют вид:
Выбор двигателя по каталогу осуществляется следующим образом. По заданному моменту рабочего механизма и частоте вращения определяется необходимая мощность. После этого определяются условия окружающей среды, выбирается исполнение по типу монтажа и высоте оси рабочего вала двигателя. Зная эти параметры, по каталогу проверяют необходимую перегрузочную способность, КПД, массу и момент инерции.
Для шахтных условий используются двигатели взрывозащищенного исполнения; для крановых механизмов — двигатели с повышенным скольжением и т.д.
В бытовых приборах используются однофазные двигатели. Однофазный двигатель отличается от трехфазного тем, что его статорная обмотка подключается к однофазному источнику питания. Ротор выполняется короткозамкнутым. На статоре размещаются две обмотки, оси которых смещены друг относительно друга на 90 электрических градусов. Одна называется рабочей, а другая -пусковой.
Рабочие характеристики асинхронного двигателя
Рабочими характеристиками асинхронного двигателя являются зависимости от мощности на валу Р2 таких параметров, как момент, частота вращения, ток статора, КПД и cosφ. Анализ характеристик показывает, что частота вращения ротора падает с увеличением нагрузки, а момент пропорционален ей. Ток статора изменяется по нелинейному закону, что связано с магнитной системой двигателя и при Р2=0 определяется током холостого хода, составляющего до 40% его номинального значения.
В системах управления используются двигатели, в которых одна из обмоток статора постоянно подключена к сети переменного тока (обмотка возбуждения), а ко второй (обмотка управления) подводится напряжение управления. Такие двигатели относятся к классу микромашин.
Микромашины используются в информационных системах, где они выполняют функции первичных преобразователей для вычислительных операций в системах автоматики и телемеханики.
Одним из примеров является сельсин, предназначенный для передачи на расстояние угловых перемещений валов, механически не связанных друг с другом. По конструкции сельсины делятся на контактные и бесконтактные. Контактные сельсины выполняются в двух вариантах. В одном обмотка возбуждения располагается на роторе, а трехфазная обмотка, называемая обмоткой синхронизации, в пазах статора. В другом варианте наоборот. При включении обмотки возбуждения сельсина на однофазное напряжение ток создает пульсирующее магнитное поле, которое индуцирует в каждой фазе обмотки синхронизации переменную ЭДС. Действующее значение ЭДС каждой фазы зависит от расположения осей этих фаз относительно оси потока возбуждения.
В простейшем случае схема дистанционной передачи угловых перемещений состоит из двух одинаковых сельсинов, у которых одноименные зажимы обмоток синхронизации соединены проводами линии связи, а на обмотки возбуждения подается напряжение сети. Один из сельсинов называют сельсин-датчиком, другой — сельсин-приемником.
Электромагнитные дефекты | Спектральная вибродиагностика
«Диагностика дефектов вращающегося оборудования по вибрационным сигналам» 2012 г.
3.2. Дефекты оборудования уровня «механизм»
Анализируя сигналы с датчиков вибрации, установленных на опорных подшипниках электрических машин, можно выявить достаточно много специфических дефектов состояния, возникающих только в электродвигателях и генераторах различного типа. Причиной повышенной вибрации электрических машин могут являться как различные внутренние электромагнитные дефекты электрических машин, так некоторые специфические особенности проявления электромагнитных процессов в обмотках и сердечниках, т. е. это просто может отражать особенности нормальной работы электродвигателей и генераторов во вращающихся агрегатах.
Применение вибрационных методов диагностики дефектов состояния электродвигателей и генераторов обычно является первым этапом в оценке их состояния. Так происходит потому, что они позволяют оперативно анализировать состояние оборудования непосредственно во время его работы, или как это принято называть в литературе, реализуют диагностику и мониторинг технического состояния в режиме «on-line».
После применения вибрационного анализа для диагностики дефектов в электрических машинах, и выявления основных характерных признаков существования того или иного дефекта, можно, а иногда даже необходимо, применять другие, специализированные и, естественно, более точные методы диагностики состояния электрических машин.
Очевидно, что описание этих методов выходит за рамки данной работы, и ознакомиться с ними можно, если обратиться к другой, более специализированной литературе. Частично, но все равно более широко, чем это обычно делается в «обычной» литературе по вибрационной диагностике, эти методы рассмотрены в данном разделе. Некоторые аспекты диагностики электротехнического оборудования приведены ниже, в соответствующем разделе.
При выборе дефектов, которые мы описываем в данном разделе, мы исходили из простого определения. Если дефект можно диагностировать при помощи установки датчиков вибрации на опорных подшипниках, то его описание включено в данный раздел. Если же для диагностики необходимо устанавливать датчики вибрации в других точках контролируемой электрической машины, то описание диагностики таких дефектов вынесено в особый раздел данного методического руководства.
Обычные, достаточно широко распространенные причины повышенной вибрации электрических машин «не электромагнитного характера», такие как небаланс, проблемы подшипников, наличие изогнутого вала, и т. д. в данном разделе методического руководства никак не рассматриваются. По вопросам диагностики этих дефектов в двигателях и генераторах вибрационными методами следует обращаться к соответствующим разделам данного руководства.
Для проведения диагностики различных электромагнитных дефектов в электрических машинах необходимо использовать измерительное оборудование, имеющее достаточно высокие эксплуатационные параметры. Не все приборы, хорошо подходящие для диагностики дефектов механической природы возникновения, такие как небаланс, расцентровка, и т. д., могут быть использованы для анализа технического состояния электрических машин переменного тока.
Для успешной диагностики различных электромагнитных проблем в электрических двигателях и генераторах необходим анализатор спектров вибросигналов с очень высокой разрешающей способностью, с числом спектральных линий, не меньшем, чем 3200, а желательно и лучше. Кроме того, такой прибор должен иметь возможность проводить регистрацию вибрационных сигналов в течение достаточно длительного интервала времени, не менее 10 — 20 секунд. Это необходимо делать для эффективного разделения проблем механической и электромагнитной природы возникновения, что возможно сделать только в момент отключения контролируемого агрегата от питающей сети.
Измерение вибрации на подшипниках электродвигателей и генераторов нужно всегда проводить в трех направлениях — вертикальном, поперечном и осевом, иначе потом будет невозможно провести полную диагностику состояния. Идеальным является синхронная регистрация (не путать с синхронизированной регистрацией, которая гораздо менее эффективна) сразу шести вибросигналов с двух подшипников электрической машины. Обычно это повышает достоверность диагнозов дополнительно не менее чем на 10 %.
3.2.6.1. Описание физических процессов в электрических машинах
Вопросами диагностики текущего технического состояния и поиска дефектов в электрических машинах обычно занимаются специальные электротехнические службы, знакомые с особенностями физических процессов в двигателях и генераторах. Для тех, кто раньше не был практически связан с процедурой оценки состояния электротехнического оборудования, необходимо обязательно ознакомиться со специальной литературой, описывающей основные особенности его работы.
Дело в том, что существует несколько типов электрических машин, процессы в которых значительно отличаются друг от друга. Кроме того, в каждом типе электрических машин существует несколько специфических особенностей, не зная которые очень сложно проводить корректную оценку их технического состояния.
В самом начале данного раздела, на первом этапе описаний, кратко вспомним некоторые основные определения и понятия из минимального, по объему, курса электрических машин. Сделаем это для простоты объяснения причин возникновения вибрации в электрических машинах, а так же для того, чтобы не загромождать эти объяснения в дальнейшем, Знание этих основополагающих понятий совершенно необходимо для проведения корректного диагностирования дефектов электрических машин, для правильного толкования спектрального состава регистрируемых вибрационных сигналов.
По принципу действия различают три основных типа широко применяемых электрических машин:
- Синхронные машины переменного тока, в которых частота вращения ротора совпадает с частотой вращения электромагнитного поля в зазоре. Эти машины могут работать в режимах двигателя и генератора, в практике встречаются и те, и другие.
- Асинхронные машины переменного тока, в которых ротор вращается несколько медленнее. Величина отставания ротора от статора составляет несколько процентов, и характеризуется термином «скольжение». Теоретически также могут работать в режимах двигателя и генератора, но на практике встречаются практически одни двигатели.
- Машины постоянного тока. Это также обратимые электрические машины, допускающие двигательный и генераторный режимы работы. На практике встречаются и те, и другие исполнения машин постоянного тока.
В данном разделе методического руководства будут рассмотрены основные способы диагностики состояния и поиска дефектов состояния электрических машин переменного тока, синхронных и асинхронных, как наиболее распространенных в промышленности и в быту. Электромагнитные проблемы машин постоянного тока очень сложно поддаются диагностике, в основе которой лежит анализ вибрационных сигналов с опорных подшипников, поэтому рассматриваться здесь не будут.
Синхронные и асинхронные машины являются по своему принципу действия обратимыми, т. е. могут работать в как режиме двигателя, так и в режиме генератора. В дальнейшем диагностика дефектов статоров синхронных и асинхронных машин, двигателей и генераторов, не будет подразделяться, т. к. они имеют одинаковые по конструкции статоры. Синхронные машины отличаются от асинхронных только конструкцией ротора, что найдет отражение в специальном подразделе, где будут описаны наиболее часто встречающиеся дефекты короткозамкнутых роторов.
Очень важно уже на самом первом этапе диагностики, заранее, определиться с диапазоном численных значений частоты вращения ротора и электромагнитного поля в зазоре. Для этого необходимо знать оборотную частоту вращения электромагнитного поля статора и оборотную частоту вращения ротора электрической машины переменного тока. Именно они определяют требования к приборам вибрационного контроля.
Максимальная частота вращения ротора электрической машины переменного тока определяется в размерности «обороты в минуту». В иностранной литературе широко используется термин RPM, что является сокращением стандартного параметра «Rotation Per Minute», т. е. те же «обороты в минуту». Эта максимальная частота вращения также является и номинальной, так как в нормальных условиях частота вращения машины переменного тока редко регулируется, а если и регулируется, то практически всегда с использованием преобразователей частоты.
Частота вращения ротора численно равна произведению частоты питающей сети, измеряемой в [Гц], умноженной на переводной коэффициент, равный 60 (количество секунд в одной минуте). В России принят стандарт частоты питающей сети в 50 Гц. Поэтому максимально возможная частота вращения роторов двигателей и генераторов переменного тока составляет 3000 об/мин. При частоте питающей сети в 60 Гц, что являющейся стандартной в Америке и в Японии, максимальная частота вращения ротора машины переменного тока составит 3600 об/мин.
В зависимости от особенностей конструкции статоров машин переменного тока частота вращения электромагнитного поля в зазоре может изменяться. Для определения этой частоты формула определения частоты вращения поля должна быть дополнена еще одним сомножителем «Р», находящимся в знаменателе:
N0 = 60 * F1 / P
Таким образом, частота вращения электромагнитного поля в зазоре электрической машины N0 равняется частному от деления максимальной частоты вращения электромагнитного поля в зазоре на число «пар полюсов статора – Р». Это конструктивный параметр обмотки статора, и он может принимать только целые значения, равные 1, 2, 3, 4, 5 и т. д. При этом частота вращения поля в зазоре электрической машины будет равна соответственно 3000 об/мин, 1500, 1000, 750, 600 и т. д.
При числе пар полюсов, отличном от единицы, частота вращения поля в зазоре электрической машины отлична от частоты питающей сети, причем в меньшую сторону от стандартных 3000 об/мин. Это очень важно учитывать при первой диагностике состояния «мало знакомых» электрических машин по спектрам вибросигналов.
В синхронных электрических машинах переменного тока частота вращения ротора всегда совпадает с частотой вращения электромагнитного поля в зазоре. Именно поэтому такие машины называются синхронными. Такие электрические машины имеют достаточно большую мощность, что связано с особенностями их конструкции. Можно смело утверждать, что «встретить» синхронную машину с мощностью менее 1000 кВт на практике очень сложно. Их мало, но они имеют большую единичную мощность, генераторы достигают мощностей до 800 МВт и более.
В асинхронных машинах переменного тока частота вращения ротора всегда меньше частоты вращения электромагнитного поля в зазоре на небольшую величину, ротор отстает от электромагнитного поля. Это отставание обычно называется скольжением «s» и измеряется в долях от единицы или в процентах. Имеющаяся небольшая разница в частотах вращения поля и ротора называется частотой скольжения ротора, которая измеряется в герцах или в процентах. В диагностике дефектов ротора асинхронного двигателя эта частота имеет большое значение.
Стандартный ряд рабочих частот вращения роторов асинхронных двигателей, в зависимости от числа пар полюсов обмотки статора, можно примерно представить в виде последовательности чисел — 2900 об/мин, 1450 об/мин, 970 об/мин.
Из этого ряда» хорошо видно, что частота вращения ротора асинхронной электрической машины всегда отстает от частоты вращения электромагнитного поля в зазоре электрической машины. Для сравнения напомним, что в синхронных машинах переменного тока, где частота вращения ротора совпадает с частотой вращения поля в зазоре, этот ряд рабочих частот вращения электрических машин составляет 3000, 1500, 1000 об/мин.
Отдельно необходимо остановиться на термине, который практические диагносты достаточно широко используют на практике, но, может быть, не совсем корректно понимают его смысл. В самом общем случае этот термин звучит примерно как «электромагнитные вибрации и электромагнитные гармоники в спектре вибрационного сигнала».
В электрических машинах переменного тока возможно возникновение специфических вибраций двух типов. Конечно, реальных причин повышения вибрации в электродвигателях и генераторах может быть гораздо больше, но при измерении вибрационных сигналов на опорных подшипниках реально зарегистрировать можно только «отклики» от этих двух причин. В другом разделе нашего руководства мы частично затронем некоторые другие аспекты вибрационной диагностики состояния электротехнической составляющей электрических машин, здесь же мы рассмотрим только способы диагностики возможных «механических дефектов» электрических машин.
Для начала дадим определение основным электромагнитным вибрациям, которые можно зарегистрировать на опорных подшипниках синхронных и асинхронных электрических машин. Как мы уже говорили, они могут возникать по нескольким причинам.
Во-первых, это электромагнитные вибрации ферромагнитных сердечников и стальных конструктивных элементов электротехнического оборудования, по которым во время работы оборудования протекает переменный магнитный поток.
Эти вибрации возникают за счет специфического процесса, который в литературе называется магнитострикцией. Этот эффект обусловлен тем, что при перемагничивании ферромагнитных материалов сердечника происходит изменение внутренней ориентации элементарных намагниченных частиц, доменов. При каждом перемагничивании сердечника происходит поворот доменов на 180 градусов, что в итоге и приводит к небольшому «линейному расширению» ферромагнитного материала. Чем больше величина магнитного потока в сердечнике, тем больше размеры элементарных доменов в ферромагнитном сердечнике, и тем больше будут вибрации сердечника электрической машины.
Поскольку перемагничивание сердечника магнитным потоком происходит дважды за один период питающей сети, то и частота вибрации, обусловленная эффектом магнитострикции, равняется удвоенной частоте питающей сети, т. е. она равняется 100 Гц. Мы обращаем дополнительное внимание читателя на то, что вне зависимости от оборотной частоты вращения ротора электрической машины, частота вибрации сердечника (пакета стали статора) всегда равняется 100 Гц.
Если оборотная частота ротора равняется 50 Гц, то гармоника электромагнитной вибрации располагается на спектре «в том месте», где может находиться вторая гармоника оборотной частоты. Если же оборотная частота ротора равняется, например, 25 Гц, то гармоника электромагнитной вибрации на спектре будет располагаться на месте четвертой гармоники оборотной частоты. Этими двумя простыми примерами мы еще раз подчеркнули, что электромагнитная гармоника не связана с частотой вращения ротора электрической машины, а зависит только от частоты питающей сети.
Во-вторых, вибрации в электрической машине вызываются специфическими электродинамическими силами, которые в литературе принято называть «амперовыми силами», т. к. их величина определяется по закону Ампера. Смысл закона Ампера звучит следующим образом – на два проводника с током действует сила взаимного притяжения, пропорциональная квадрату протекающего по проводникам тока, и обратно пропорциональная расстоянию между проводниками. Если направление тока в обоих проводниках одинаковое, то проводники притягиваются друг к другу. Если токи в параллельных проводниках текут в разные стороны, то проводники отталкиваются друг от друга.
Самое важное для нас в этом законе заключается в том, что в числителе стоит произведение токов в проводниках, т. е. квадрат тока промышленной частоты. Из тригонометрии следует известное соотношение, гласящее, что квадрат синусоидального сигнала есть другой гармонический сигнал, но имеющий удвоенную частоту. Таким образом, мы аналогично получаем, что сила электродинамического воздействия между двумя проводниками с синусоидальными токами промышленной частоты имеет удвоенную частоту, относительно частоты питающей сети.
Таким образом, мы определили, что вибрации электрической машины, не вызванные механическими проблемами, имеют удвоенную частоту относительно частоты питающей сети, т. е. равную 100 Гц. Это определение относится как к электромагнитным причинам повышенной вибрации, возникающим в сердечниках электрических машин силами магнитострикции, так и к электродинамическим силам взаимодействия проводников друг с другом, возникающим при протекании токов по обмоткам электрической машины.
Все это можно сказать несколько иначе. Основная, или, говоря терминами, принятыми в вибрационной диагностике, оборотная частота электромагнитных сил и вибраций в электрической машине равна удвоенной частоте питающей сети. Это совершенно отдельная сила, не связанная с частотой вращения ротора, что может быть легко выяснено при помощи средств кепстрального анализа. Она просто имеет частоту, равную удвоенной частоте питающей сети. Гармоники основной частоты этой силы имеют значения 200 Гц, 300, 400 и т. д. В чистом виде эта сила очень явно проявляется в статическом электрооборудовании. Примером этого является трансформатор, в котором гармоника вибрации с частотой питающей сети в 50 Гц практически отсутствует, а максимальное значение имеет гармоника вибрации с частотой 100 Гц.
Есть еще и третья (по порядку нашего повествования, а не по порядковому номеру в спектре) гармоника вибрации, имеющая электромагнитную природу возникновения. Она называется зубцово – пазовой гармоникой. Она не всегда столь значительна, как первые две, но сказать о ней все равно нужно.
Зубцово – пазовая гармоника вызывается особенностями конструктивного исполнения электрической машины переменного тока. У нее на статоре и на роторе обмотка всегда укладывается в пазах. При вращении ротора в зазоре статора возникает периодическое чередование ферромагнитных зубцов и пазов на статоре и роторе. Это приводит к модуляции магнитного потока в зазоре частотой, связанной с количеством пазов на роторе и статоре электрической машины.
При разработке электрических машин принимаются все меры, чтобы исключить влияние зубцово — пазовой структуры на работу машины. На статоре и роторе всегда различное число пазов, на роторе применяется «скос» пазов, когда ось паза идет не вдоль оси ротора, а как бы немного закручена вокруг оси и т. д. Тем не менее, существуют типы электрических машин, в которых «пазовая» гармоника оборотной частоты ротора является явно выраженной на спектре.
Необходимо хорошо понимать, что все эти три гармоники в спектре вибросигнала, имеющие электромагнитную природу возникновения, не всегда являются признаками наличия дефектов в контролируемой электрической машине, они практически всегда сопровождают ее работу. Признаком наличия дефекта обычно является увеличение амплитуд электромагнитных гармоник выше некоторого уровня, являющегося порогом нормального состояния оборудования.
Основной признак того, что анализируемая гармоника в спектре сигнала вибрации имеет электромагнитную причину возникновения — мгновенное исчезновение этой гармоники сразу после отключения электрической машины от сети.
Очень важным является то, что диагностика причин повышенной вибрации электрических машин должна проводиться при возможно большей нагрузке двигателя. Если исследования будут проводиться на холостом ходу, или же при небольшой нагрузке, то диагностика дефектов будет затруднена.
3.2.6.2. Сводка электромагнитных проблем ротора и статора
Приведем краткую сводку по электромагнитным проблемам электрических машин, которые можно эффективно диагностировать по спектрам вибросигналов. Здесь же приведем все характерные признаки каждого вида дефекта.
Для описания дефектов здесь и далее будем использовать термины:
F1 — частота питающей сети, в России равна 50 Гц.
FЭМ — частота электромагнитных сил в электрических машинах, равна удвоенной частоте сети, в России 100 Гц.
N0 — частота вращения поля в зазоре электрической машины, численно равна частному от деления 3000 на число пар полюсов Р, которое может принимать целые значения от единицы и более (об/мин).
F0 — частота электромагнитного поля в зазоре, Гц.
FP — собственная частота вращения ротора электрической машины. Для синхронных машин она равна частоте вращения поля. Для асинхронных машин она меньше на величину скольжения ротора.
FP = F0 (1 — s)
s - скольжение ротора относительно электромагнитного поля в асинхронных машинах, безразмерная величина, численно равняется разнице между частотой вращения поля в зазоре и частотой вращения ротора, отнесенной к частоте вращения поля в зазоре
s = (N0 — FP) / N0
FП — зубцово — пазовая частота вибрации, численно равная произведению числа пазов (на роторе или статоре) на частоту электромагнитного поля в зазоре. Может быть повышенной относительно статора, относительно ротора, может быть разностная или суммарная частота биений пазовых частот ротора и статора.
Наиболее важные проблемы статора, которые можно диагностировать на основе анализа вибрационных сигналов:
- Ослабление прессовки пакета стали, обрыв или замыкание стержней, витков, или даже секций в обмотке статора. Соответствующие вибрации проявляются на частоте действия электромагнитных сил FЭМ, равной удвоенной частоте питающей сети. Особое внимание при диагностике такого дефекта следует уделять наличию дробных гармоник электромагнитной частоты — 1/2, 3/2, 5/2 и т. д. от основной частоты. По значению частоты эти гармоники соответствуют основной и нечетным гармоникам питающей сети. Появление этих гармоник в спектре вибрационного сигнала говорит об опасной степени развития дефекта, о необходимости оперативного принятия соответствующих мер.
- Эксцентриситет, эллипсность внутренней расточки статора относительно оси вращения ротора. Возникает обычно как дефект монтажа подшипниковых стоек, дефект состояния подшипниковых щитов или при общей деформации корпусных элементов самого статора. В вибрации проявляется на частоте вращения поля в зазоре, а также и на частоте действия электромагнитных сил в электрической машине, равной 100 Гц. Иногда сопровождается появлением боковых гармоник вблизи частоты 100 Гц. Дефект обычно сопровождается неравенством вертикальной и поперечной составляющих соответствующих гармоник. Пространственный максимум гармоник соответствует направлению эксцентриситета смещения оси статора. Наиболее просто направление смещения оси статора относительно оси ротора диагностируется при снятии «розы вибраций», когда датчик последовательно перемещается по огибающей вокруг подшипника со смещением при каждом измерении на угол 30 — 45 градусов.
- Неправильный взаимный осевой монтаж активных пакетов ротора и статора. Иногда для данного дефекта используется термин: «неправильная установка электромагнитных осевых разбегов». При работе электрической машины, в результате сил магнитного притяжения, пакет ротора всегда стремится к положению точно под пакетом статора.
Если этому стремлению будут препятствовать неправильно смонтированные в осевом направлении подшипники, то в них будут возникать компенсирующие осевые усилия, которые и вызовут осевые вибрации подшипников. Подшипники достаточно быстро нагреются и выйдут из строя. Иногда ротор двигателя «утягивается» в осевом направлении валом механизма, что возможно при неправильном осевом монтаже приводного механизма, сопровождающемся малой осевой подвижностью в соединительной муфте.
Основные проблемы ротора, диагностируемые по вибрации:
- Эксцентриситет внешней поверхности ротора относительно оси его вращения. На спектре вибросигнала этот дефект проявляется в усилении первой гармоники частоты вращения ротора. Усиливается частота действия электромагнитной силы, вокруг которой иногда появляются боковые гармоники, сдвинутые друг от друга на частоту скольжения ротора, умноженную на число полюсов.
- Обрыв или нарушение контакта в стержнях или кольцах «беличьей клетки» в асинхронном двигателе. Обычно проявляется на спектре вибрационного сигнала вблизи частоты вращения вала ротора. Кроме того, этот дефект всегда сопровождается появлением вблизи основной гармоники частоты вращения ротора боковых гармоник, сдвинутых относительно гармоники частоты вращения ротора на интервал, равный произведению частоты скольжения на число полюсов двигателя. Очевидно, что этот дефект присущ только асинхронным двигателям, а в синхронных машинах он никак не проявляется.
- Ослабление прессовки всего пакета стали ротора или только в области зубцов. Сопровождается усилением второй гармоники питающей сети или, при ослаблении стали в области зубцов, появлением пазовой частоты ротора с боковыми полосами, сдвинутыми друг от друга на частоту, равную двойной питающей частоте. Такой дефект на практике диагностируется достаточно сложно, так как его спектральные признаки напоминают признаки других дефектов, и проявляются не очень сильно, чаще всего неявно.
3.2.6.3. Диагностика электромагнитных проблем статора
При всех проблемах статора синхронной или асинхронной электрической машины, имеющих в своей основе первопричину электромагнитной природы, в спектре вибросигнала возникает весьма специфическая картина. В основном она сопровождается возникновением высокой амплитуды основной гармоники на частоте электромагнитных процессов FЭМ. Как уже неоднократно говорилось выше, ее частота равна удвоенной частоте питающей сети, т. е. всегда равняется 100 Гц. Еще раз напоминаем, что эта частота никак не связана с оборотной частотой вращения ротора.
Этот эффект достаточно хорошо объясняется с точки зрения физики происходящих в стали статора процессов. Силы взаимного притяжения, действующие между «распрессоваными» листами электротехнического железа или элементами крепления пакета стали, имеют максимум амплитуды дважды за один период изменения питающей сети — во время абсолютного минимума и максимума магнитного потока. Чем сильнее будет распрессован пакет статора электрической машины, тем большую амплитуду в спектре будет иметь основная электромагнитная гармоника.
Аналогично выглядит картина взаимодействия между элементами обмотки статора. Математически это объясняется тем, что электромагнитные силы пропорциональны квадрату тока или магнитного потока. Поскольку и тот и другой синусоидальны, то их произведение также пропорционально синусоиде, но изменяющейся уже с удвоенной частотой, относительно исходной частоты питающей сети.
На спектре вибрационного сигнала, приведенном на рисунке 3.2.6.1., картина появления электромагнитных проблем в статоре выражается в усилении пика на электромагнитной частоте. При значительных дефектах в стали могут появиться и вторая (200 Гц) гармоника электромагнитной частоты FЭМ, и даже третья (300 Гц).
Кроме того, в спектре может появиться также целый ряд дробных гармоник, имеющих кратность 1/2 от электромагнитной гармоники. В данной ситуации, по своей частоте, эти гармоники будут численно соответствовать нечетным целым гармоникам частоты питающей сети. Такое совпадение двух семейств гармоник усложняет их разделение частоте, требуя большей внимательности и применения дополнительных диагностических средств.
Очень важно хорошо понимать и помнить основное различие синхронных и асинхронных электрических машин, значительно влияющих на диагностику дефектов по спектрам вибрационных сигналов.
Гармоники вибрации от электромагнитных процессов в статоре синхронной машины, по своей физической природе, являются синхронными относительно частоты вращения ротора. В асинхронном двигателе эти же семейства гармоник являются несинхронными, т. к. частота вращения ротора и частота питающей сети не кратны между собой, а различаются между собой пропорционально частоте скольжения. В данном определении под коэффициентом кратности соотношений частот мы понимаем влияние числа пар полюсов обмотки, уложенной в пазах статора.
Ослабление прессовки активного железа статора в электрической машине обуславливается, в основном, двумя часто встречающимися причинами — или общим ослаблением элементов крепления железа статора, или же явлением «отслоения» крайних листов и пакетов стали.
При этих локализациях дефекта железа статора важную роль начинает играть место установки вибродатчика. Чем ближе он устанавливается к дефектному месту пакета статора, чем короче будет путь прохождения «полезного» вибрационного сигнала, тем более корректно можно будет проводить диагностирование и, достаточно часто, удается даже локализовать место проявления дефекта. Наиболее эффективно датчик вибрации устанавливать не на опорных подшипниках ротора, а непосредственно на корпусе сердечника статора, а еще лучше и на самом пакете активной стали.
Аналогично обстоит дело и с особенностями проявления в спектрах вибросигналов различных дефектов обмоток статора, но поиск их и локализация происходят гораздо сложнее. Более подробно мы рассмотрим этот вопрос в другом разделе данного руководства, однако основные требования к месту установки датчика вибрации останутся прежними – как можно ближе к возможному месту возникновения предполагаемого дефекта пакета или обмотки статора.
Самое главное, что нужно помнить при диагностике дефектов, что различить тип диагностируемого в статоре электрической машины дефекта, имеет — ли он «чисто электрическую природу возникновения», или же он обусловлен одними «магнитными проблемами», методами спектральной вибрационной диагностики практически невозможно. Единственный, достаточно корректный признак наличия короткозамкнутого витка в обмотке статора (электрическая причина возникновения повышенных вибраций) — наличие боковой гармоники вблизи частоты 100 Гц, и ее чаще всего обнаружить не удается. В большинстве практических случаев необходимо применение более специализированных методов диагностики состояния электрических машин.
3.2.6.4. Проблемы эксцентричности пакета статора
Эксцентриситет статора возникает чаще всего как дефект изготовления «шихтованного» пакета стали статора, или как дефект монтажа статора. Очень высока вероятность возникновения эксцентриситета статора в процессе монтажа электрической машины, особенно, если статор и подшипниковые опоры монтируются раздельно. Данный дефект статора может возникнуть в результате ослабления фундамента или как итог тепловых и иных деформаций в агрегате и фундаменте.
Для примера на рисунке 3.2.6.2. приведен спектр вибросигнала, зарегистрированного на подшипнике асинхронного двигателя, имеющего номинальную частоту вращения ротора, равную n0 = 1480 об/мин. Этот спектр соответствует наличию в электрической машине достаточно развитого дефекта типа «эксцентриситет статора».
Эксцентриситет статора приводит, с точки зрения физики протекания электромагнитных процессов, к периодическому изменению магнитной проводимости воздушного зазора, к ее пульсации, или, говоря иными словами, к ее модуляции. Эта пульсация происходит с удвоенной частотой сети, т. е. с частотой воздействия электромагнитных сил.
Удвоение частоты пульсации относительно питающей сети возникает из — за того, что мимо зоны окружности статора, где произошло изменение величины зазора, поочередно проходят и северный, и южный полюса электромагнитного поля, вращающегося в зазоре электрической машины. Удвоенные пульсации магнитной проводимости приводят к такой же пульсации магнитного потока и, как результат, к пульсации электромагнитной силы и вибрации с частотой 100 Гц.
Дополнительно несколько возрастает амплитуда гармоники на частоте вращения электромагнитного поля в зазоре. Это позволяет в асинхронных двигателях хорошо дифференцировать эксцентричность статора от эксцентричности ротора, где вибрация идет с частотой вращения ротора. Для выявления этого различия необходимо наличие спектроанализатора с хорошим разрешением.
Для разделения эксцентриситетов статора и ротора в синхронной машине между собой, при диагностике следует помнить, что эксцентриситет статора неподвижен в пространстве и различен по амплитуде вибрации в направлениях измерения вибрации. Благодаря такой локализации эксцентриситет статора приводит к возникновению направленной в пространстве вибрации. Это можно выявить при помощи последовательного перемещения вибродатчика по контролируемому подшипнику «вокруг вала». Эксцентриситет же ротора всегда «вращается» вместе с ротором, поэтому он не имеет стационарного максимума при определенном значении угла установки датчика. При эксцентриситете статора такой максимум явно выражен.
Для исключения проявления эксцентриситета в вибрации электрических машин необходимо, чтобы воздушный зазор между статором и ротором должен быть неизменным по окружности. Обязательно должно соблюдаться требование к качеству взаимного монтажа статора и ротора, что различие в величине воздушного зазора вдоль окружности не должно превышать значение в 5% для асинхронных двигателей и генераторов, и не превышать 10 % для синхронных двигателей. Значение этого параметра жестко контролируется при помощи специальных щупов при монтаже электрической машины. Такая процедура измерения должна производиться при нескольких взаимных положениях ротора и статора.
3.2.6.5. Эксцентричный ротор
Это достаточно часто встречающаяся в практике причина повышенной вибрации асинхронных электрических машин. У синхронных электрических машин переменного тока этот дефект менее заметен из-за больших рабочих зазоров.
При наличии эксцентриситета ротора в характере распределения электромагнитного поля в зазоре двигателя возникает ряд особенностей. Плотность электромагнитного поля вдоль окружности зазора изменяется вместе с поворотом ротора. Это приводит, из-за переменного зазора, к неравномерности тягового усилия двигателя. При совпадении оси поля статора с зоной увеличенного зазора тяговое усилие несколько уменьшается, при этом возрастает величина частоты скольжения. При смещении оси поля в зону меньшего зазора тяговое усилие растет, частота скольжения падает. При числе пар полюсов статора, большем единицы, такой процесс повторяется «Р» раз.
Если бы мы имели очень чувствительные приборы для измерения частоты вращения ротора, то мы бы обнаружили следующее. В интервале перемещения ротора от зоны, с увеличенным зазором в сторону зоны, с уменьшенным зазором, ротор бы ускорился в своей частоте вращения на небольшое значение. На интервале перехода ротора обратно, к зоне с увеличенным зазором, ротор бы замедлился на то же значение. Конечно, таких приборов у нас нет, но это видно на спектре с большой разрешающей способностью, где появляются признаки таких изменений скорости.
На спектре вибросигнала, показанном на рисунке 3.2.6.3., вокруг основной частоты вращения ротора, должны появиться симметрично расположенные боковые пики, гармоники, напоминающие зубцы короны. Симметрия пиков относительно основной частоты достаточно хорошо понятна — это следствие «мини ускорений и мини замедлений» частоты вращения ротора вокруг своего среднего значения. Аналогичные зубцы, даже еще большей интенсивности, появляются и вокруг пика электромагнитной силы, на частоте, равной второй гармонике питающей сети.
Необходимо пояснить причины проявления эксцентричности ротора на этой частоте.
Вращение эксцентричного ротора модулирует проводимость зазора с удвоенной частотой. При числе пар полюсов, равном единице частота вращения поля равна 50 Гц, удвоенная частота сети, частота электромагнитной вибрации равна 100 Гц. Эксцентричность ротора приводит к модуляции электромагнитной силы. При уменьшении числа пар полюсов частота вращения поля в зазоре уменьшится в Р раз. Переменный зазор ротора за один свой оборот будет модулировать электромагнитную силу 2 х Р раз больше частоты своего вращения, что как раз и соответствует частоте электромагнитной силы.
Эксцентричный ротор генерирует вокруг FP и вокруг FЭМ семейства гармоник, представляющих из себя пики, сдвинутые на одинаковый шаг по частоте. Сдвиг между этими гармониками равен произведению частоты скольжения на число полюсов обмотки статора
DF = FS * 2 * P
Причина такого шага между зубцами на спектре по частоте достаточно корректно объясняется. Частота скольжения есть разностная частота биений между частотой вращения поля и частотой вращения ротора. В течении одного оборота эксцентриситет ротора влияет «2 х Р» раз на тяговое усилие двигателя, которое связано с частотой скольжения ротора. Сама частота скольжения FS иногда видна на спектре, на начальном участке, на самой низкой частоте. Она проявляется обычно в диапазоне от 0,3 до 2,0 Гц. Для ее регистрации нужен низкочастотный датчик.
Необходимо помнить, что во временном сигнале эксцентриситет ротора проявляется в виде пульсирующей вибрации, средняя частота которой располагается в диапазоне частот (или вблизи него) между FЭМ и гармоникой оборотной частоты ротора, по частоте чуть меньшей, чем у электромагнитной силы (порядковый номер этой гармоники ротора равен удвоенному числу пар полюсов статора). Разделить эти гармоники на спектре можно только при высоком частотном разрешении используемого анализатора вибрационных сигналов.
Эксцентричность ротора обычно проявляется и в вертикальной, и в поперечной проекции вибрации. Иногда ее удается обнаружить даже и в осевой проекции. Так бывает при наличии эксцентричности ротора не по всей его длине, а только в районе одного, если смотреть вдоль оси ротора, края пакета электротехнической стали.
Эксцентричность ротора часто носит нестационарный характер, когда в спектре работающего двигателя имеется характерная картина, а практические измерения зазора не подтверждают диагноз. Причина здесь обычно в термических процессах, когда по тем или иным причинам ротор несимметрично нагревается, изгибается и дает картину эксцентриситета.
После останова двигателя, в процессе его разборки для измерения зазора, температуры быстро выравниваются и диагноз не подтверждается. Часто так бывает при обрывах стержней или «частичных задеваниях» ротора об неподвижные элементы, когда ротор так же начинает односторонне нагреваться.
3.2.6.6. Неправильный осевой монтаж двигателя
Принцип действия всех электрических машин переменного тока примерно одинаков - вращающий момент создается за счет взаимодействия магнитного поля статора с магнитным полем ротора (синхронные машины) или с роторными проводниками с током (асинхронные машины).
Простейший аналог, характеризующий работу синхронной электрической машины переменного тока – притяжение двух постоянных магнитов, из которых один есть вращающееся магнитное поле статора, а второй жестко зафиксирован на роторе. В асинхронной машине переменного тока все выглядит немного иначе – вращающееся магнитное поле статора увлекает за собой проводники с током, которыми являются стержни короткозамкнутой клетки ротора.
В синхронном электродвигателе машине энергия подается одновременно в ротор от источника постоянного тока, и в статор из питающей промышленной сети. В асинхронном электродвигателе внешняя энергия подается только из питающей сети в статор, поэтому для работы двигателя часть энергии должна быть передана (трансформирована) через зазор во вращающийся ротор. Только в этом случае возникает электромагнитное взаимодействие между полями ротора и статора. Наличие передачи энергии через зазор объясняет необходимость максимального уменьшения воздушного зазора в асинхронных машинах, а так же их большую чувствительность этого типа электрических машин к нелинейности величины зазора между ротором и статором.
Сила взаимного притяжения между ротором и статором является векторной величиной и состоит из трех составляющих — радиальной составляющей, касательной, полезной, и осевой. Касательная составляющая электромагнитной силы в зазоре является полезной, т. к. именно она создает вращающий момент. Радиальная составляющая есть сила притяжения ротора к статору и при постоянстве величины воздушного зазора эти силы, диаметрально противоположно, взаимно компенсируются.
Рассмотрим чуть подробнее осевую составляющую сил взаимного притяжения в зазоре электрической машины. Если магнитные сердечники ротора и статора в осевом направлении расположены непосредственно друг против друга, то и суммарная осевая составляющая силы электромагнитного притяжения ротора и статора равна нулю. Иначе будет происходить в том случае, когда произойдет взаимное осевое смещении сердечников ротора и статора. При этом итоговая осевая сила не будет равна нулю, она будет стремиться вернуть ротор в исходное нейтральное положение. Чем больше будет величина осевого смещения, тем больше будет величина осевого усилия, втягивающего ротор внутрь статора.
Величина допустимого свободного осевого перемещения ротора относительно статора определяется особенностями монтажа опорных подшипников ротора. Она максимальна при использовании подшипников скольжения, и минимальна при использовании подшипников качения, особенно радиально – упорного типа.
Если осевая подвижность ротора достаточна для перемещения его в нейтральное положение, то проблем с увеличением вибраций не будет. Если же возникнет препятствие к такому осевому перемещению, то на нем возникнет значительная осевая вибрация. Частота этой вибрации, как это показано на рисунке 3.2.8.4., обычно равняется частоте электромагнитных сил. Иногда гармоники вибрации возникают и частоте вращения ротора, это зависит от состояния поверхностей в месте препятствии к осевому смещению. Наиболее часто такая проблема возникает у асинхронных электродвигателей с подшипниками качения, осевая подвижность которых почти нулевая.
Осевая вибрация в электродвигателях, оборудованных подшипниками качения, обычно возникает при следующих основных причинах:
- При осевом смещении магнитных пакетов статора и ротора, обусловленном особенностями их взаимного первичного монтажа.
- При неполной посадке подшипников на вал, или в подшипниковых щитах, после проведения ремонтных работ.
- При смещении подшипниковых щитов, или посадочных мест подшипников после выполнения ремонтных и восстановительных работ.
Вне зависимости от причины возникновения повышенных осевых усилий на опорные подшипники качения, это довольно опасный дефект. Большинство подшипников качения не предназначены для компенсации осевых усилий, и поэтому в такой ситуации достаточно быстро выходят из строя.
У подшипников скольжения обычно существует больший конструктивный «осевой разбег», поэтому осевые вибрации в них возникают гораздо реже. Кроме того, подшипники скольжения обычно используются в крупных синхронных электрических машинах, в которых вопрос компенсации осевых усилий, по причине наличия больших воздушных зазоров, стоит менее остро.
Тем не менее, и в таких условиях осевая подвижность подшипников скольжения может оказаться недостаточной для компенсации дефектов монтажа. В таком случае возникает осевая вибрация, обычно выражающаяся в возникновении трения галтели вала о торцевую поверхность подшипникового вкладыша.
Для устранения осевой вибрации в насосных агрегатах необходимо корректно и комплексно выставлять при монтаже все три так называемых в практике «осевых разбега», расположенных в насосе, в муфте и в электродвигателе.
Достаточно часто вал электродвигателя «утягивается в осевые вибрации» валом насоса при дефектах системы осевой разгрузки рабочего колеса насоса. Парадокс диагностики — дефект в насосе, а вибрация в двигателе.
На практике бывают случаи, когда для борьбы с осевыми вибрациями ротор в подшипниках скольжения, перед пуском, принудительно смещают в осевом направлении, например, при помощи лома, и после этого двигатель некоторое время хорошо работает. С течением времени, в процессе работы, ротор смещается обратно, и осевые вибрации агрегата снова возрастают до прежнего значения.
3.2.6.7. Обрыв стержней ротора
Наиболее распространенным конструктивным исполнением обмотки ротора асинхронного двигателя является короткозамкнутый ротор с «беличьей клеткой». У такого ротора в пазах, без изоляции, забиваются медные или латунные стержни, или же пазы полностью залиты сплавом алюминия. Концы стержней, по торцам ротора, объединяются замыкающими кольцами из такого же материала.
В процессе работы, а особенно при пуске асинхронного электродвигателя, по стержням беличьей клетки протекает большой ток, и они сильно нагреваются. Частой причиной выхода из строя двигателя является нарушение контакта стержней с замыкающими кольцами, называемые в практике «отгоранием стрежней». Появление такого дефекта в отдельных стержнях приводит к увеличению нагрузки на оставшиеся стержни, дополнительному перегреву их, и также к последующему «отгоранию», и т. д. Весь этот лавинообразный процесс разрушения обмотки ротора сопровождается потерей мощности электродвигателя, к его постепенному перегреву и выходу из строя.
Выявление начальных признаков повреждений стержней клетки ротора является очень актуальной задачей и позволяет повысить надежность работы асинхронных двигателей с короткозамкнутой клеткой на роторе.
Рассмотрим особенности физических процессов и вибрационных признаков этого в роторе, имеющем характерные признаки начальной стадии данного дефекта. Будем считать, что повредился один стержень короткозамкнутой клетки.
Необходимо сразу же сказать, что спектр вибрации асинхронного электродвигателя с отгоревшим стержнем во многом похож на спектр вибрации двигателя, имеющего эксцентричный ротор. На первый взгляд между этими дефектами мало общего, но при ближайшем рассмотрении можно выявить причины возникновения сходства вибрационных сигналов, зарегистрированных на опорных подшипниках.
Как и при эксцентричном роторе, отгоревший стержень приводит к модулированию величины тягового усилия двигателя. В момент прохождения зоны отгоревшего стержня мимо электромагнитного полюса (скорее наоборот, т. к. поле асинхронного электродвигателя обгоняет ротор) тяговое усилие импульсно уменьшиться, ротор чуть-чуть замедлится. В это время под полюс поля подойдет зона бездефектного стержня, в нем за счет возросшего скольжения будет несколько больший ток, тяговое усилие также импульсно возрастет, и ротор чуть-чуть ускорится.
Эти импульсные мини ускорения и мини замедления ротора на спектре будут характеризоваться возникновением боковых зубцов вокруг основной гармоники частоты вращения ротора. Такой спектр для двигателя с частотой вращения ротора 2920 об/мин показан на рис 3.2.6.5. Понятно, что зубец (гармоника) с чуть меньшей частотой будет соответствовать моменту времени с замедлением, а зубец (гармоника) с чуть большей частотой будет принадлежать участку времени с ускорением ротора.
Сразу же напрашивается аналогия, что если поврежденных стержней в роторе будет не один, а два, то боковых гармоник будет по две с каждой стороны оборотной частоты, если будет три дефектных стержня – три пары боковых гармоник, и так далее. Это так, и не так. Примерно в половине практических случаев такой эффект соответствия количества дефектных стержней и боковых гармоник будет соблюдаться, а в половине случаев такого количественного соответствия не будет.
Корректное описание такой особенности картины спектрального отображения «дефектных» стержней на спектре вибрационных сигналов является очень сложным, и мы его здесь опустим. Мы ограничимся простой констатацией факта, что если боковых гармоник на спектре более двух (пар), то на роторе находится больше двух отгоревших стержней, или, говоря точнее, стержней с дефектами контакта. Если боковых гармоник всего две, то количество стержней с дефектами точно не определено.
Разделить две причины повышенной вибрации, о которых мы начали рассуждение, это эксцентриситет ротора и отгоревшие стержни беличьей клетки, возможно, но только при наличии у диагноста «хорошего анализатора спектров вибрационных сигналов». В данном случае речь идет о хорошем спектральном разрешении прибора, он должен рассчитывать спектры с разрешением не хуже 3200 частотных линий. В этом случае дефекты можно разделить, учитывая особенности различия их спектрах вибрационных сигналов.
Это следующие различия:
- Характерная «корона» из зубцовых гармоник вокруг пика электромагнитной частоты FЭМ проявляется на спектре различно — при эксцентриситете ротора она имеется во всех режимах работы диагностируемой электрической машины. При наличии в роторе дефекта типа «дефектный стержень», корона на спектре появляется только при значительной нагрузке электрической машины, на холостом ходу она отсутствует.
- При эксцентриситете ротора «корона» практически симметрична по величинам зубцовых гармоник относительно центрального пика, а при дефектах стержней пик на меньшей частоте всегда меньше «зеркального» пика на большей частоте. Этот факт достаточно хорошо сообразуется с картиной физических процессов. Уменьшение скорости происходит при нормальном скольжении и нормальном токе в последнем (перед дефектным) «хорошем» стержне клетки. Ускорение же ротора происходит при увеличенном скольжении, большем токе в первом «хорошем» стержне и, как результат, с большим ускорением.
- За счет колебательного «успокоения» пульсации частоты вращения ротора, после прохождения стержня с дефектом, что может возникать при определенных параметрах нагрузки на валу электродвигателя, на спектре вибрационного сигнала может возникнуть несколько гармоник частоты вращения ротора, и обычно все они окружены «коронами». Такая же картина может возникать при наличии механических или электромагнитных ослаблений в электрической машине. Параметр «электромагнитное ослабление» раскрывать мы не будем из-за его специфичности, оставив его для исследования специалистам по электрическим машинам.
В качестве численного ограничения степени проявления этого дефекта можно считать, что «короны» у исправного двигателя быть не должно. Если она появилась, и наибольший пик «короны» превысил 10 % от центрального пика — вероятность существования отгоревших стержней в обмотке ротора очень большая. Для контроля количественного значения признаков этого дефекта лучше использовать спектры с логарифмической шкалой по амплитуде. Если на нем пики «короны» будут меньше основного пика менее, чем на 20 dВ, то предполагаемый дефект имеет место.
В заключение, подчеркивая особенности диагностики данной причине повышенной вибрации, необходимо еще раз указать, что такая диагностика возможно только с применением анализаторов спектров с высокой разрешающей способностью. Это нужно для разделения на спектре частот вращения поля, ротора и боковых гармоник. Центральный пик «короны» должен соответствовать частоте вращения ротора, а не быть равным частоте вращения поля в зазоре.
3.2.6.8. Дефекты зубцово — пазовой структуры
Такая неисправность не очень часто встречается в практике, но, тем не менее, ее можно достаточно просто описать и успешно диагностировать.
Условно эту неисправность можно представить в виде ротора, у которого отсутствует один ферромагнитный зуб. Это приводит к тому, что мимо пазов статора перемещается «магнитный непериодический» элемент, наводящий в обмотке статора импульсы, число которых за один оборот будет численно равно числу пазов на статоре. На спектре вибрационного сигнала это будет представлено пиком на частоте, равной произведению частоты вращения ротора на число пазов статора.
Не вдаваясь в тонкости физического описания, следует также сказать, что дефектный зуб будет модулировать и электромагнитную силу статора. Это будет происходить потому, что дважды за свой один оборот вращающееся поле «будет натыкаться» на дефект магнитной проводимости воздушного зазора двигателя, на «отсутствующий» зуб ротора. На спектре вблизи пика зубцовой частоты появятся два зеркально расположенных пика, сдвинутых относительно своего «главного пика» на частоту электромагнитной силы FЭМ, как уже неоднократно говорилось равную удвоенной частоте питающей сети.
Наиболее сложным для диагностики будет спектр вибрации при наличии магнитных дефектов на роторе и статоре одновременно, причем дефектов множественных. На спектре будут присутствовать зубцовые частоты ротора и статора, а также будут частоты их биения, зашумленные множественными «зеркальными» пиками.
«Положительным» при этом будет то, что при таком дефекте обычно сильно падает тяговое усилие, возрастает потребляемый ток и двигатель очень быстро выходит из строя, обычно раньше, чем персоналу удается записать спектры и выявить множественный магнитный дефект методами вибрационной диагностики.
Приборы нашего производства для диагностики электромагнитных дефектов
- ViAna-4 – универсальный 4-хканальный регистратор и анализатор вибросигналов, диагностика электромагнитных дефектов по току
Рабочие характеристики асинхронного двигателя — зависимости потребляемого тока I1 и мощности Р1, КПД, cos φ и скольжения s от полезной механической мощности P2. Эти характеристики определяются при постоянном напряжении U1 и частоте f1 сети.
Рабочие характеристики асинхронного двигателя могут быть получены экспериментально (опытным путем) и рассчитаны с помощью схемы замещения.
Ниже приводится расчет рабочих характеристик асинхронного двигателя по схеме замещения.
По обмотке статора асинхронной машины протекает многофазная система токов, обычно трехфазная, которая создает в воздушном зазоре машины вращающееся магнитное поле (магнитный поток Ф).
Вращающееся магнитное поле в свою очередь индуктирует (наводит) в проводниках обмотки ротора ЭДС, под действием которой в замкнутой накоротко обмотке ротора протекает ток I2. Этот ток, взаимодействуя с магнитным потоком Ф, создает механическую силу, стремящуюся привести ротор во вращение в сторону вращения магнитного поля.
Определим, с какой частотой вращения магнитное поле машины пересекает проводники ротора. Эта частота равна, об/мин:
(9)
Определим частоту ЭДС f2, которая наводится магнитным полем асинхронной машины в проводниках ротора, Гц:
f2=р n2/60. (10)
Если учесть, что n2=n1s [см. формулу (9)], то можно записать
(11)
Из формулы (11) видно, что если ротор машины неподвижен (n=0, s=l), то частота ЭДС, наводимой в роторе, равна частоте сети. По мере увеличения частоты вращения ротора ЭДС понижается и при синхронной частоте будет равна нулю. На рис. 13 показаны изменения скольжения, частоты и ЭДС в роторе в зависимости от частоты вращения ротора.
Рис. 13. Зависимость скольжения s, частоты f2 и ЭДС, наводимой в роторе, E2 от частоты вращения асинхронного двигателя n
Из закона электромагнитной индукции следует, что при гармоническом изменении магнитного поля наводимая в обмотке ЭДС равна:
E=4,44fwkобФmax, (12)
где f — электрическая частота, Гц; w — число последовательно соединенных витков фазы; kоб — обмоточный коэффициент; Фmax — максимальное значение рабочего потока, сцепленного с обмоткой, Вб.
Знание частоты f2 в роторе дает возможность определить ЭДС ротора Е2 при произвольной частоте вращения (скольжении), В, в виде
E2=4,44f2w2kоб2Фmax, (13)
где w2 — число последовательно соединенных витков обмотки ротора; kоб2 — обмоточный коэффициент ротора.
Подстановка f2 из формулы (11) дает, В,
E2s=4,44f s w2kоб2Фmax=sE2, ( 14)
где Е2 — ЭДС, наводимая в неподвижной обмотке ротора потоком Фmax, В.
Осветим теперь важный для анализа работы асинхронных двигателей вопрос о зависимости вращающегося магнитного потока двигателя от режима работы машины. Для этого, чтобы представить себе эту зависимость, определим вначале, какую ЭДС Е1 наводит этот поток в каждой фазе обмотки статора, В:
E1=4,44fw1kоб1Фmax, (15)
где w1 — число витков одной фазы статора; kоб1 —обмоточный коэффициент обмотки статора.
Напряжение U1, приложенное к статору, уравновешивается ЭДС E1 и падением напряжения I1z1 на внутреннем сопротивлении z1=r1+jx1 обмотки статора (х1— индуктивное сопротивление обмотки, определяемое потоком рассеяния) . При изменении нагрузки двигателя от нуля (холостой ход) до номинальной падение напряжения составляет 5—10 % приложенного. Таким образом, с достаточной для качественного анализа точностью можно полагать, что напряжение U1 полностью компенсируется ЭДС Е1 т. е. .
U1≈E1 (16)
Учитывая формулу (15), нетрудно заключить, что ЭДС и вращающийся магнитный поток двигателя зависят от приложенного к двигателю напряжения. При постоянном напряжении поток Фmах остается приблизительно постоянным независимо от изменения нагрузки двигателя.
Рассмотрим вначале явления, происходящие в машине с заторможенным ротором и замкнутой накоротко обмоткой ротора. Асинхронный двигатель в этом режиме подобен трансформатору с короткозамкнутой вторичной обмоткой. Отличие состоит в том, что вторичная магнитная цепь отделена от первичной воздушным зазором, первичная обмотка (статора) и вторичная обмотка (ротора) равномерно распределены по окружности, а магнитное поле вращающееся.
Как видно из формулы (14) и рис. 13, ЭДС, наводимая в обмотке ротора, когда он неподвижен, является максимальной. В силу этого и ток, проходящий по обмоткам статора и ротора, также будет наибольшим. Этот режим называется режимом короткого замыкания (КЗ). Ток статора в этом режиме называется током короткого замыкания и превышает его номинальный ток в 4—7 раз. Асинхронный двигатель в таких условиях нельзя длительно оставлять под полным напряжением из-за перегрева обмоток, который может привести к аварии.
Для определения тока короткого замыкания двигателя делают опыт КЗ. Этот опыт заключается в том, что к двигателю с заторможенным (неподвижным) ротором подводят пониженное напряжение, регулируя которое, устанавливают номинальный ток. Напряжение, подводимое к двигателю в опыте КЗ, оказывается малым (15— 20%) по сравнению с номинальным. На базе этого опыта можно в безопасных для двигателя условиях определить величину тока короткого замыкания /к при номинальном напряжении, А:
(17)
где Uном — номинальное напряжение, В; Uк — напряжение в опыте КЗ при номинальном токе, В; Iном — номинальный ток, А.
Замеряя в этом опыте по ваттметру мощность короткого замыкания Рк, подводимую к одной фазе двигателя, находят также коэффициент мощности в режиме КЗ
(18)
и эквивалентное активное сопротивление статора и ротора двигателя гк в режиме КЗ на одну фазу, Ом,
rк=Pк/Iном2 (19)
Это эквивалентное активное сопротивление равно сумме активного сопротивления статора и приведенного активного сопротивления ротора. Понятие о приведенном активном и реактивном сопротивлении ротора будет дано ниже.
Определив угол φк по значению cosφк из формулы (18), легко найти и эквивалентное реактивное сопротивление двигателя в режиме короткого замыкания, Ом:
хк=rкctgφк (20)
Индуктивное сопротивление хк равно сумме индуктивного сопротивления статора и приведенного индуктивного сопротивления ротора.
Поскольку частота вращения ротора двигателя в этом режиме равна нулю, его механическая мощность также равна нулю. Потери в стали во время опыта короткого замыкания очень малы, так как мал вращающийся магнитный поток. Поэтому мощность Рк, которая подводится к машине, почти вся идет на нагрев проводников обмоток статора и ротора. То же самое можно сказать о режиме КЗ при полном напряжении.
Теперь представим себе, что обмотка ротора разомкнута, а обмотка статора включена в сеть. Ток по роторной обмотке при этом не проходит и асинхронный двигатель подобен трансформатору, но уже в режиме холостого хода (XX). Так как ток в проводниках ротора отсутствует, то механическая сила не возникает и ротор остается неподвижным.
По обмотке статора при этом проходит ток холостого хода I0, который создает магнитодвижущую силу (МДС), необходимую для создания магнитного потока Фmax. Поскольку в магнитной цепи асинхронного двигателя имеется зазор, то для создания магнитного потока требуется относительно больший ток, чем в трансформаторе. В двигателях большой и средней мощности ток XX составляет 25—35, а в двигателях малой мощности — 35—60% номинального тока.
Наводимая в неподвижном роторе ЭДС может быть определена по формуле (14), если учесть, что скольжение в этом режиме равно 1. Отношение ЭДС в обмотке статора к ЭДС в обмотке ротора называется коэффициентом трансформации ЭДС и может быть определено по формуле
(21)
Мощность, потребляемая двигателем в режиме XX при неподвижном роторе, расходуется на потери в проводниках статора двигателя, потери на перемагничивание и вихревые токи в стали статора и в стали ротора.
Важно заметить, что режим XX при неподвижном роторе очень близок к режиму, который возникает, когда асинхронный двигатель не выполняет полезной работы и вращается на холостом ходу. В этом случае частота вращения ротора двигателя почти равна синхронной, а скольжение примерно равно нулю [см. формулы (4), (9) и рис. 13]. Электродвижущая сила в роторе будет близкой к нулю, и, следовательно, подобно режиму XX при неподвижном роторе практически равен нулю ток в роторе. При холостом ходе вращающегося двигателя ток в обмотке статора, как и в случае холостого хода неподвижного двигателя, определяется в основном МДС, необходимой для создания магнитного потока Фmax.
При вращении ротора в двигателе появляются потери, которых нет в случае неподвижного ротора; это механические потери на трение и вентиляционные. Однако когда частота вращения ротора примерно равна синхронной, исчезают потери в стали ротора двигателя, поскольку магнитное поле теперь очень медленно перемещается относительно ротора и его сталь почти не перемагничивается. Таким образом, потери и, следовательно, мощность в двух режимах холостого хода оказываются близкими.
Асинхронная машина в режиме холостого хода может быть представлена схемой замещения, показанной на рис. 14. Для определения параметров и характеристик двигателя помимо опыта КЗ выполняют опыт XX, во время которого замеряют ток обмотки статора I0 (А) и потребляемую мощность Р0 (Вт). Это позволяет определить сопротивления в схеме замещения двигателя на холостом ходу, а также коэффициент мощности XX:
cosφ0=P0/(UI0). (22)
Рис. 14. Схема замещения первичной цепи (статора) асинхронного двигателя, работающего в режиме холостого хода
Перейдем теперь к рассмотрению общего случая режима нагрузки, когда ротор вращается с частотой, меньшей частоты XX. Определим, какой ток будет проходить по обмотке ротора во всем диапазоне рабочих режимов. Наводимая вращающимся магнитным потоком ЭДС в обмотке ротора зависит при постоянном напряжении только от скольжения и может быть найдена по (14). Ток ротора будет, очевидно, зависеть от ЭДС, наводимой в роторе, и сопротивления обмотки ротора, при этом полное сопротивление цепи в случае переменного тока определяется не только активным сопротивлением проводников обмотки, но и ее индуктивным сопротивлением. Индуктивное сопротивление обмотки ротора изменяется так же, как и ЭДС ротора E2s, Ом:
x2s=2πf2L2=s2πf1L2 =sx2, (23)
где L2 — индуктивность обмотки ротора, Гн; х2— индуктивное сопротивление рассеяния обмотки неподвижного ротора при s=l, Ом.
Теперь, используя закон Ома для цепей переменного тока, найдем ток ротора, А:
(24)
Учитывая (14) и (23), формулу (24) можно записать иначе:
(25)
Таким образом, можно видеть, что при скольжении, равном нулю или близком к нему (это соответствует синхронной или близкой к синхронной частоте вращения ротора), ток ротора равен нулю или очень мал. Это совпадает с тем, что было сказано выше относительно режима XX при вращающемся роторе. По мере уменьшения частоты вращения двигателя, т. е. при увеличении скольжения, ток возрастает за счет увеличения ЭДС ротора, однако рост тока ограничивается увеличением индуктивного сопротивления ротора.
Если разделить числитель и знаменатель выражения (25) для тока ротора I2 на s, то получим следующую формулу:
(26)
Из этого следует, что если мы примем, что ротор неподвижен, а его активное сопротивление меняется обратно пропорционально скольжению, то по его обмотке будет проходить точно такой же ток, как и при вращающемся роторе. Удобство такого преобразования состоит в том, что оно позволяет вместо вращающегося ротора (вращающаяся вторичная электрическая цепь) рассматривать неподвижный ротор (неподвижная вторичная цепь).
Однако изучение процессов, происходящих в асинхронной машине, и расчет ее характеристик можно сделать более удобными, если заменить реальную обмотку ротора эквивалентной с числом витков в фазе и числом фаз, равным им у первичной обмотки (обмотки статора), т. е. вместо обмотки ротора с числом фаз m2, числом витков в фазе w2 и обмоточным коэффициентом kоб2 будем полагать, что обмотка ротора имеет число фаз ти число витков в фазе w1 и обмоточный коэффициент kоб1. Эта замена называется приведением обмотки ротора к обмотке статора. Нетрудно видеть, что магнитный поток Ф в этом случае будет наводить в эквивалентной (приведенной) обмотке ротора ЭДС, равную ЭДС обмотки статора E2‘=E1 (штрихом будем обозначать приведенные величины).
Замена обмотки ротора не должна привести к изменению потребляемой мощности, потерь, магнитодвижущей силы и фазы тока обмотки. Из этого условия определяются приведенные величины тока, активного и индуктивного сопротивлений обмотки ротора .
В соответствии с (13) имеем, В
(27)
Из формул (27) вытекает отношение между ЭДС приведенной и реальной обмоток заторможенного ротора, которое называется коэффициентом трансформации ЭДС или напряжений. Он равен:
(28)
Из условия неизменности магнитодвижущих сил F2‘ =F2 следует, что
откуда вытекает отношение между токами, которое называется коэффициентом трансформации токов. Он равен:
(29)
Из условия неизменности потерь в обмотке ротора при приведении следует, что
откуда
(30)
или r2‘=krr2,
где kr=kIkU — коэффициент приведения сопротивлений.
Из условия неизменности фазы тока обмотки ротора следует
(31)
Процесс приведения цепи ротора показан на рис. 15. От схемы замещения обмотки вращающегося ротора (рис. 15,а) переходим к схеме замещения неподвижного ротора (рис. 15,б), а затем приводим обмотку ротора к обмотке статора (рис. 15, в).
Рис. 15. Схемы замещения: а — обмотки вращающегося ротора; б — неподвижного ротора; в — обмотки ротора, приведенной к обмотке статора
Поскольку теперь ЭДС Е1 первичной обмотки равна ЭДС Е2‘ вторичной обмотки, мы можем соединить электрически соответствующие точки схемы замещения обмотки статора и ротора. В результате получим схему замещения асинхронного двигателя, показанную на рис. 16. Здесь активное сопротивление rm отражает наличие потерь в стали двигателя. Для двигателей средней и большой мощности удобнее пользоваться упрощенной схемой замещения, приведенной на рис. 17.
Рис. 16. Т-образная схема замещения асинхронного двигателя
Рис. 17. Упрощенная Г-образная схема замещения асинхронного двигателя
Используя последнюю схему, легко найти токи и ЭДС в обмотках, подводимую и полезную мощность, а также мощность потерь при любой частоте вращения двигателя. Для этого следует лишь найти скольжение, соответствующее заданной частоте n, по формуле (4) и вычислить сопротивление r2‘/s в схеме по рис. 17. После этого нетрудно найти ток намагничивания I0 и приведенный ток I2‘ в роторной цепи, А:
(32)
Это дает возможность вычислить электрические потери в обмотке статора трехфазного двигателя (m1=3), Вт:
(33)
Электрические потери в обмотке ротора (Вт) можно найти, предварительно рассчитав по (30) приведенное сопротивление ротора r2‘ (Ом):
(34)
Суммарная активная мощность, передаваемая со статора на ротор, как видно из схемы (рис. 17), будет равна, Вт:
(35)
Эта мощность передается на ротор электромагнитным путем и поэтому называется электромагнитной мощностью.
Если из электромагнитной мощности вычесть мощность электрических потерь в обмотке ротора, то получим полную механическую мощность двигателя, Вт:
(36)
Полная механическая мощность расходуется на вращение приводного механизма (полезная механическая мощность) и на покрытие механических Рмх.п и добавочных Рд.п потерь самого двигателя. Поэтому полезная механическая мощность Р2 будет равна, Вт:
(37)
Коэффициент полезного действия двигателя по определению равен отношению отдаваемой (полезной механической) мощности к потребляемой (активной электрической) мощности. Разность между этими мощностями составляют потери в двигателе, равные, Вт:
где Pм.п=m1I02rm — магнитные потери или потери в стали. Таким образом, КПД двигателя равен:
(38)
Использование первого или второго выражения для КПД определяется тем, какая из мощностей — P1 или Р2— известна. На практике наиболее часто применяется первое выражение (38).
Используя схему замещения, можно определить также ток, потребляемый двигателем из сети, т. е. ток статора, который равен сумме двух токов. Первый из них — это ток XX, который протекает по цепи 1 (рис. 17) и не изменяется при изменении частоты вращения ротора, второй — ток ротора I2‘, который определяется по (32). Складывая геометрически эти два тока, можно получить ток статорной обмотки. Такое геометрическое сложение показано на рис. 18. Углы φ2‘, φ0, необходимые для построения, можно найти с помощью схемы замещения (см. рис. 17):
Таким образом, знание параметров схемы замещения (r1, x1, r2‘, х2‘, rm, хm) и приложенного напряжения U1 (напряжение сети) позволяет с помощью приведенных выше формул определить полезную мощность, токи, потери, КПД, коэффициент мощности двигателя при различных скольжениях (частоте вращения).
Рис. 18. Диаграмма токов асинхронного двигателя
Зависимости потребляемого тока I1 и мощности Р1, КПД, cosφ и скольжения s от полезной механической мощности P2 носят название рабочих характеристик двигателя. Эти характеристики определяются при постоянном напряжении U1 и частоте f1 сети. Пример рабочих характеристик приведен на рис. 19.
Рис. 19. Рабочие характеристики асинхронного двигателя
Рассмотрим рабочие характеристики асинхронного двигателя. При холостом ходе (полезная мощность Р2—0) скольжение s также равно нулю (частота вращения ротора n практически равна синхронной), сопротивление r2/’s равно бесконечности (см. рис. 17) и ток I2‘==0. По обмотке статора протекает ток холостого хода I0. Коэффициент полезного действия η равен нулю, так как равна нулю полезная мощность Р2, а коэффициент мощности равен коэффициенту мощности для тока холостого хода (cosφ1=cosφ0).
При увеличении нагрузки частота вращения ротора уменьшается и увеличивается скольжение s. За счет увеличения s уменьшается сопротивление цепи 2 (см. рис. 17) и увеличивается ток ротора, а следовательно, и ток статоpa. Поскольку увеличивается полезная мощность, растет, КПД двигателя, а также коэффициент мощности.
Обычно номинальная мощность на валу двигателя достигается уже при небольшом понижении частоты вращения ротора и вся область рабочих режимов находится в диапазоне скольжений от 0 до 2—5%.
Поэтому скоростная характеристика n=f(P2) у асинхронного двигателя имеет небольшой наклон к оси абсцисс. Характеристики такого вида принято называть жесткими. Соответственно характеристика s=f(P2) имеет слабый подъем при возрастании нагрузки. В асинхронном двигателе частота вращения ротора меньше частоты вращения поля, за счет чего обеспечивается наведение ЭДС, а также создание тока 1% в обмотке ротора и вращающего электромагнитного момента, под действием которого ротор приходит во вращение.
Характеристика cosφ=f(P2) лежит в области значений, меньших 1, так как асинхронный двигатель всегда потребляет ток I0, почти не зависящий от нагрузки в диапазоне мощностей от Р0 до Р2≈Рном. При XX обычно φ0<0,2, т. е. он содержит большую реактивную составляющую. При увеличении нагрузки cosφ быстро возрастает и достигает максимального значения при мощности Р2≈Р2ном. При увеличении нагрузки выше номинальной cosφ несколько снижается.
Коэффициент полезного действия достигает своего максимального значения при Р2≈ (0,6÷0,8)Р2ном и снижается при дальнейшем росте нагрузки. Поскольку двигатель обычно работает при переменной нагрузке, изменяющейся в пределах (0,6—1)Р2ном, то КПД в этом диапазоне изменения нагрузки должен быть достаточно высок.
Все о частотных преобразователях
Частотные преобразователи — это устройства для плавного изменения частоты вращения синхронных и асинхронных двигателей посредством изменения частоты питающего тока.
В современной технике благодаря простоте конструкции и обслуживания, небольшим габаритам, высокой надёжности, и низкой стоимости огромное распространение получили именно асинхронные электродвигатели.
При работе различных устройств, в качестве привода которых применяются асинхронные электродвигатели, часто возникает необходимость в регулировании их скорости вращения.
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов.
Существует три способа регулирования скорости вращения асинхронного двигателя:
- — изменение скольжения. Этот способ используется в двигателях с фазным ротором. В цепь фазного ротора вводится регулировочный реостат. При использовании этого способа можно получить большой диапазон регулирования частоты вращения в сторону понижения. Однако этот способ имеет, и ряд недостатков, основным из которых является большие потери на регулировочном реостате (нагрев) т.е. снижение КПД. Как следствие этот способ применяют для кратковременного снижения частоты вращения.
- — изменение числа пар полюсов. Этот способ предполагает использование специальных двигателей (многоскоростных) имеющих более сложную обмотку статора, позволяющую изменять число пар полюсов, и короткозамкнутый ротор. Недостатком этого метода является ступенчатое регулирование (3000, 1500, 1000, 750, 600 об/мин – 1,2,3,4,5 обмотки с 1,2,3,4,5 парами полюсов соответственно), большая стоимость и громоздкость двигателя.
- — изменение частоты питающего тока (напряжения). На практике этот метод, в общем случае (самый простой), предполагает вместе с частотой изменять и действующее значение подведенного напряжения таким образом, что бы отношение U/f было постоянно. Это (изменение входного напряжения) делается для сохранения перегрузочной способности двигателя с изменением частоты сети.
В приводах центробежных насосов и вентиляторов, которые являются типичными представителями переменной механической нагрузки (момент нагрузки возрастает с увеличением скорости вращения) используется функция напряжения к квадрату частоты U/f 2 = сonst.
В более совершенных частотных регуляторах для управления скоростью вращения и электромагнитным моментом двигателя независимо, используется так называемое векторное управление. При этом виде управления необходимо управлять амплитудой и фазой статорного тока (т.е. вектором) в зависимости от положения ротора относительно обмотки статора в каждый момент времени.
Применение частотных регуляторов. Зачем нужен частотный регулятор?
Асинхронные двигатели имеют ряд недостатков (сложность регулирования скорости вращения, большие пусковые токи, относительно малый пусковой момент). Однако благодаря своей простоте, надежности и дешевизне получили огромное распространение в промышленности и быту. Применение же частотных регуляторов «устраняет» недостатки асинхронных двигателей и кроме этого позволяет избежать установки различного дополнительного оборудования, уменьшить потери в технологическом процессе, увеличить КПД самого двигателя, уменьшить износ, как самого двигателя, так и оборудования использующегося в данном технологическом процессе.
Рассмотрим более детально применение частотных регуляторов на примере насосного оборудования. Потери в технологической системе зависят от нагрузки создаваемой потребителями (на неё мы влиять не можем) и гидравлическим сопротивлением элементов этой системы. Так поддержание давления у потребителей на постоянном уровне при изменяющейся нагрузке, возможно только при использовании дополнительного оборудования (различных регуляторов давления, мембранных баков, дроссельных задвижек). Использование этого оборудования создает дополнительное гидравлическое сопротивление и как следствие снижает КПД системы в целом. При использовании частотного регулятора двигатель сам регулирует давление в сети посредством изменения частоты вращения. Кроме того при снижении технологической нагрузки уменьшая частоту вращения насоса, КПД самого насоса тоже возрастает. Таким образом достигается как бы двойной эффект увеличивается КПД системы в целом, за счёт исключения из системы лишнего гидравлического сопротивления и увеличение КПД самого насоса как агрегата.
Применение частотного регулятора также значительно снижает эксплуатационные затраты связанные с износом оборудования. Плавное регулирование вращения (и плавный пуск) практически полностью позволяют избежать как гидравлических ударов, так и скачков напряжения в электросети (особенно актуально в системах, где предусмотрен частый пуск/остановка насоса).
Модель динамики трехфазной асинхронной машины, также известной как индукционная машина, в единицах СИ или о.у.
Представлять ли крутящий момент, приложенный к валу или ротору. скорость как входной сигнал Simulink ® блока, или чтобы представить вал машины как Вращающийся механический порт Simscape ™.
Выберите Torque Tm , чтобы указать входной крутящий момент в Н · м или о.е.
а так и выставить порт Тм . Скорость машины
определяется инерцией станка J (для SI
станка) или постоянной инерции H (для пу станка)
и разницей между приложенным механическим моментом Tm , и внутренний электромагнитный момент, Те .Когда скорость положительная, положительный крутящий момент
сигнал указывает на режим двигателя, а отрицательный сигнал указывает на генератор
режим.
Выберите Скорость w , чтобы указать вход скорости, в
рад / с или в о.у., и выставить порт w . Машина
скорость навязывается и механическая часть модели (автомат
инерция J ) игнорируется. Используя скорость как
механический ввод позволяет моделировать механическую связь между двумя
машины.
На рисунке показано, как смоделировать жесткое соединение валов в мотор-генераторной установке. когда в машине 2 игнорируется момент трения. Выходная скорость машина 1 (двигатель) подключена ко входу скорости машины 2 ( генератор), а выход электромагнитного момента машины 2 Te применяется к механическому входу крутящего момента Tm станка 1. Коэффициент Kw учитывает единицы скорости обеих машин (рад / с или о.е.) и передаточное число коробки передач w2 / w1.Коэффициент KT учитывает единицы крутящего момента обеих машин (Н.м или пу) и номиналы машин. Также из-за инерции J2 игнорируется в машине 2, J2 относится к скорости машина 1 и должна быть добавлена к инерции машины 1 Дж1 .
Выберите Механический вращающийся порт , чтобы открыть механический вращающийся порт Simscape, S , который
позволяет соединять вал машины с другими блоками Simscape, которые имеют механические порты вращения.
На рисунке показано, как подключить идеальный крутящий момент Исходный блок из библиотеки Simscape на вал машины для представления машины в в режиме двигателя или в режиме генератора, когда частота вращения ротора положительный.
Асинхронный двигательпротив синхронного: в чем разница?
Все вращающиеся электродвигатели переменного и постоянного тока работают за счет взаимодействия двух магнитных полей. Один из них стационарный и (обычно) связан с внешним кожухом двигателя.Другой вращается и связан с вращающимся якорем двигателя (также называемым его ротором). Вращение вызвано взаимодействием двух полей.
В простом двигателе постоянного тока есть вращающееся магнитное поле, полярность которого меняется каждые пол-оборота с помощью комбинации щеточного коммутатора. Щетки — в основном проводящие углеродные стержни, которые касаются проводов на роторе при их вращении — также служат для подачи электрического тока во вращающийся якорь.В бесщеточном двигателе постоянного тока ситуация несколько иная. Вращающееся поле все еще меняется на противоположное, но посредством коммутации, которая происходит в электронном виде.
Асинхронный двигатель обладает уникальным качеством, заключающимся в отсутствии электрического соединения между неподвижной и вращающейся обмотками. Сетевой переменный ток подается на клеммы двигателя и питает неподвижные обмотки.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронное название возникает из-за разницы между скоростью вращения поля статора и несколько меньшей скоростью ротора.
Ротор с короткозамкнутым ротором от асинхронного двигателя. Этот пример взят из небольшого вентилятора.Большинство современных асинхронных двигателей имеют ротор в виде беличьей клетки. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из листов электротехнической стали.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора.Это асинхронные двигатели с фазным ротором. Смысл конструкции состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель впервые начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Стационарная часть обмоток асинхронного двигателя (статор) подключается к источнику переменного тока.Подача напряжения на статор вызывает прохождение переменного тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но положение полюса статора меняется при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс в роторе пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора, потому что поле ротора всегда на некоторую величину отстает от поля статора. Это отставание заставляет ротор вращаться со скоростью, несколько меньшей, чем скорость поля статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.Скольжение в двигателе конструкции B составляет от 0,5% до 5%.
Когда двигатель остановлен, обмотки ротора и статора фактически являются первичной и вторичной обмотками трансформатора. Когда к статору изначально подается переменный ток, ротор не движется. Таким образом, индуцированное в роторе напряжение имеет ту же частоту, что и напряжение статора. Когда ротор начинает вращаться, частота индуцированного в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение s связывает их через f r = sf.Здесь s выражается в виде десятичной дроби.
Поскольку асинхронный двигатель не имеет щеток, коллектора или подобных движущихся частей, его производство и обслуживание обходятся дешевле, чем другие типы двигателей.
Для сравнения, рассмотрим синхронный двигатель. Здесь ротор вращается с той же скоростью, то есть синхронно, с магнитным полем статора. Как и асинхронный двигатель, синхронный двигатель переменного тока также содержит статор и ротор. Обмотки статора также подключаются к сети переменного тока, как в асинхронном двигателе.Магнитное поле статора вращается синхронно с частотой сети.
Обмотка ротора синхронного двигателя может получать ток различными способами, но обычно не за счет индукции (за исключением некоторых конструкций, только для обеспечения пускового момента). Тот факт, что ротор вращается синхронно с частотой сети переменного тока, делает синхронный двигатель полезным для управления высокоточными часами.
Следует подчеркнуть, что ротор синхронного двигателя переменного тока вращается синхронно с целым числом циклов переменного тока.Это не то же самое, что сказать, что он вращается со скоростью, равной частоте сети. Частота вращения ротора двигателя, то есть синхронная скорость N, составляет:
N = 120 футов / P = 60 футов / точек
Где f — частота сети переменного тока в Гц, P — количество полюсов (на фазу), а p — количество пар полюсов на фазу.
Соответственно, чем больше полюсов, тем медленнее вращается синхронный двигатель. При равной мощности дороже построить более медленный двигатель. При 60 Гц:
- Двухполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 3600 об / мин.
- Четырехполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1800 об / мин.
- Шестиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 1200 об / мин.
- Восьмиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 900 об / мин
- Десятиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 720 об / мин.
- Двенадцатиполюсный / фазный синхронный двигатель переменного тока вращается со скоростью 600 об / мин.
малой мощности полезны там, где требуется точное время.Синхронные двигатели переменного тока высокой мощности, хотя и более дорогие, чем трехфазные асинхронные двигатели, обладают двумя дополнительными качествами. Несмотря на более высокую начальную стоимость, они могут окупиться в долгосрочной перспективе, поскольку они более энергоэффективны, чем другие типы двигателей. Во-вторых, иногда одновременно, они могут работать с опережающим или единичным коэффициентом мощности, поэтому один или несколько синхронных двигателей переменного тока могут обеспечивать коррекцию коэффициента мощности, а также выполнять полезную работу.
Существует несколько различных типов синхронных двигателей переменного тока.Обычно их классифицируют по способам создания магнитного поля. Двигатели с независимым возбуждением имеют магнитные полюса, питаемые от внешнего источника. Напротив, магнитные полюса возбуждаются самим двигателем в самовозбуждаемой (также иногда называемой невозбужденной и непосредственно возбужденной) машине. Типы без возбуждения включают реактивные двигатели, двигатели с гистерезисом и двигатели с постоянными магнитами. Кроме того, существуют двигатели с возбуждением постоянным током.
Синхронные двигатели без возбуждения имеют стальные роторы.В процессе работы ротор намагничивается необходимыми магнитными полюсами аналогично тому, как это происходит в асинхронном двигателе. Но ротор вращается с той же скоростью и синхронно с вращающимся магнитным полем статора. Причина в том, что в роторе есть прорези. Двигатели запускаются как асинхронные. Когда они приближаются к синхронной скорости, прорези позволяют синхронному магнитному полю фиксироваться на роторе. Затем двигатель вращается с синхронной скоростью до тех пор, пока требуемый крутящий момент низкий.
В реактивном электродвигателе ротор имеет выступающие полюса, напоминающие отдельные зубцы.Ротора меньше, чем полюсов статора, что препятствует совмещению полюсов статора и ротора, и в этом случае вращения не будет. Реактивные двигатели не запускаются автоматически. По этой причине в ротор часто встраивают специальные обмотки (так называемые обмотки с короткозамкнутым ротором), поэтому реактивный двигатель запускается как асинхронный.
Гистерезисный двигатель использует широкую петлю гистерезиса в высококоэрцитивном роторе из кобальтовой стали. Из-за гистерезиса фаза намагничивания в роторе отстает от фазы вращающегося магнитного поля статора.Эта задержка создает крутящий момент. При синхронной скорости поля ротора и статора блокируются, обеспечивая непрерывное вращение. Одним из преимуществ гистерезисного двигателя является то, что он самозапускается.
Синхронный двигатель переменного тока с постоянными магнитами имеет постоянные магниты, встроенные в ротор. Последние лифты приводятся в действие этими двигателями, и коробка передач не требуется.
Пример двигателя с постоянными магнитами с электронной коммутацией, в данном случае от небольшого воздушного вентилятора. Этот стиль называется аутраннером, потому что ротор находится вне статора и встроен в лопасти вентилятора.Это четырехполюсный двигатель, о чем свидетельствуют четыре обмотки статора (внизу). Также виден датчик Холла, который обеспечивает часть электронной коммутации.Синхронный двигатель с прямым возбуждением может называться различными названиями, включая ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянными магнитами. Ротор содержит постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Пример того, как на катушки двигателя постоянного тока подается питание в последовательности, которая приводит в движение ротор.Компьютер управляет последовательным включением питания обмоток статора в нужное время с помощью твердотельных переключателей. Питание подается на катушки, намотанные на зубья статора, и если выступающий полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере некоторый магнитный поток пересекает зазор под углом, не перпендикулярным поверхностям зуба.В результате возникает крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя — это реактивный двигатель с регулируемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них пазов.
В отличие от асинхронных двигателей, здесь нет стержней ротора и, следовательно, в роторе отсутствует ток, создающий крутящий момент.Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых ротор содержит проводники.
Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен способу регулирования скорости с помощью тока якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки.На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения числа оборотов двигателя.
И, наконец, синхронный двигатель переменного тока с возбуждением постоянным током. Для создания магнитного поля требуется выпрямленный источник питания. Эти двигатели обычно имеют мощность, превышающую одну лошадиную силу.
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате.Формат PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями.Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), известный как беличья клетка. Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе.Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым числом, кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора. Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться.Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Когда ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически они становятся такими же, как ротор с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором. Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора.Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцируемое в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцируемого в нем напряжения f r падает. Если f — частота напряжения статора, то скольжение, s, связывает два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № м
, где N = количество проводников под одним полюсом статора (обычно мало для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу.Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N Ñ „ m = s E
Описание синхронных двигателейСинхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Существует два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем с переключаемым сопротивлением, содержит ротор, отлитый из стали, который имеет выемки или зубья, называемые выступающими полюсами.Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков.Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если явный полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть магнитного потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых ротор содержит проводники.Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
Асинхронный асинхронный двигатель, ток в статоре
Например, это модель эквивалентной схемы для статора?
Это эквивалентная модель одной фазы всего двигателя. Статорная часть состоит из Rs, Xs и Xm. Wr и Rr — компоненты ротора. Обратите внимание, что было упрощено устранение влияния соотношения оборотов статора: ротора. Однако вы можете предположить, что указанные параметры ротора относятся к цепи статора.Обращение к статору означает, что частота статора может использоваться для расчета как Xs, так и Xr. Скорость ротора — это механическая скорость.
Ток статора рассчитывается путем деления фазного напряжения на эквивалентный комплексный импеданс всей показанной цепи.
Скорость магнитного поля статора в радианах в секунду составляет 4xPixf / полюс. Скорость ротора (механическая скорость) — это скорость магнитного поля статора за вычетом скольжения. Скорость магнитного поля ротора такая же, как скорость магнитного поля статора.Что касается другой проблемы, я считаю, что омега статора — это частота мощности, а механическая скорость — это скорость магнитного поля.
Для дальнейшего пояснения концепции:
В принципе, всегда следует помнить о механической конструкции. При анализе характеристик двигателя предполагается, что «холостой ход» — это работа без каких-либо подключений к валу. За исключением этого особого условия, скорость ротора = скорости нагрузки. Крутящий момент, развиваемый в роторе, равен крутящему моменту нагрузки плюс механические потери в двигателе, состоящие из трения подшипника и аэродинамического сопротивления ротора (парусность).В этой задаче механические потери считаются частью нагрузки или пренебрежимо малыми. Скорость статора = скорость поля = синхронная скорость.
Похоже, что в этой задаче потери в стали считаются незначительными. В эквивалентной схеме потери в стали (гистерезис и потери на вихревые токи) будут представлены в виде резистора, включенного параллельно с Xm. Это довольно большая потеря, чтобы пренебречь ею, но мне, вероятно, необходимо пренебречь ею, чтобы построить проблему таким образом, как построен.
Зависимость крутящего момента двигателя и нагрузки от скорости
Эта проблема определяет требуемый крутящий момент нагрузки, крутящий момент, необходимый для движения нагрузки с заданной скоростью. Требуемый момент нагрузки пропорционален квадрату скорости. Это типично для фаната. Предоставляется информация для определения крутящего момента двигателя как функции скорости. Установившаяся рабочая скорость и крутящий момент для двигателя, приводящего в движение нагрузку, являются пересечением кривой допустимого крутящего момента двигателя и кривой требуемого крутящего момента нагрузки.Если фактическая рабочая скорость выше или ниже нормальной рабочей точки, как это было при первоначальном включении двигателя, избыточный крутящий момент двигателя применяется для ускорения двигателя и инерции нагрузки до нормальной рабочей скорости.
Привод с регулируемой скоростью: обзор асинхронного двигателя
Обзор индукционной машины
Индукционные машины имеют обмотку статора, подключенную к источнику переменного тока, и обмотку ротора. В зависимости от конструкции машины обмотка ротора может быть короткозамкнута, чтобы образуют клеточную обмотку или наматываются аналогично обмотке статора и соединяются с контактными кольцами.Машины с сепаратором ротора не имеют электрического соединения с ротором. Машины с фазным ротором могут иметь ротор с короткозамкнутым или подключенным к внешней цепи. Мы будем рассматривать только трехфазные индукционные машины в этом курсе, но теория машин и теория управления применимы к машины с другим количеством фаз. (В настоящее время ведутся исследования по созданию 5, 9 или 15 фазных индукционные машины для использования с частотно-регулируемыми приводами).
Подробное описание принципов работу асинхронных машин можно найти в EE 332 Теория электрических машин.
Обмотка статора машины переменного тока производит вращающийся ммс, который вращается с синхронная скорость:
, где ω с — синхронная скорость в радианах в секунду, а n с — синхронная скорость в оборотах в минуту (об / мин), p количество полюсов в машине. Если воздушный зазор между ротором и статором имеет одинаковую длину по окружности машины, результирующая волна плотности потока будет иметь ту же форму, что и волна mmf.
Когда волна плотности потока статора проходит мимо проводников ротора, возникают напряжения и токи. в контуре ротора.Токи ротора создают вторую волну плотности потока, которая взаимодействует со статором. плотность потока для создания силы и крутящего момента.
Если ротор ускоряется до точки, в которой он вращается с той же скоростью, что и плотность магнитного потока статора, больше не будет видимого изменения магнитного потока в проводниках ротора, что приведет к нулевым наведенным напряжениям и токам и отсюда нулевой крутящий момент. Для создания крутящего момента ротор должен вращаться со скоростью, отличной от синхронной. Если внешняя механическая система приводит в движение ротор выше синхронной скорости, индукционная машина действует как генератор.Если ротор вращается со скоростью ниже синхронной, асинхронная машина является двигателем. Связь между скоростью ротора и Синхронная скорость определяется с использованием терминов скольжение и скорость скольжения.
Скольжение определяется как
, где в приведенных выше уравнениях ω м , n м являются механическими частота вращения ротора в радианах в секунду и об / мин соответственно, ω e — электрическое питание частота, в радианах в секунду, а ω r — это скорость ротора в электрических радианах в секунду и определяется как
. Модель эквивалентной схемыЕсли индукционная машина подключена к источнику с фиксированной частотой, стандартная модель эквивалентной схемы по фазе cam может использоваться для анализа производительности.Модель схемы, показанная ниже, основана на модели эквивалентной схемы для трансформатора, с переменным сопротивлением из-за скольжения.
На диаграмме выше R 1 , X 1 используются для обозначения сопротивления статора. и реактивное сопротивление соответственно. R 2 , X 2 используются для обозначения сопротивления ротора. и реактивное сопротивление соответственно, а X м используется для обозначения намагничивающего реактивного сопротивления.
Анализируя эквивалентную схему, можно найти мощность воздушного зазора и преобразователь мощности в механическая система:
Вычитая потери ротора из мощности воздушного зазора:
Для определения электромагнитного момента, развиваемого машиной (без учета механических потерь)
Крутящий момент — Кривая скорости
Анализ эквивалентной схемы и вычисление крутящего момента, знакомая кривая крутящего момента / скорости для индукционного машины получается:
При работе асинхронной машины с приводом цель состоит в том, чтобы получить желаемый крутящий момент при заданном скорость.Обычно это включает работу в узком диапазоне по обе стороны от синхронной скорости (двигательная или генерирующая) и изменение частоты для перемещения синхронной скорости вверх и вниз по желанию.
Индукционный генераторкак ветрогенератор
Индукционный генератор как ветрогенератор Статья Учебники по альтернативной энергии 19.06.2010 05.12.2021 Учебники по альтернативной энергииИндукционный генератор как ветрогенератор
Вращающиеся электрические машины обычно используются в ветроэнергетических установках, и большинство этих электрических машин могут работать как двигатель или как генератор, в зависимости от конкретного применения.Но помимо синхронного генератора , который мы рассматривали в предыдущем руководстве, существует еще один более популярный тип трехфазной вращающейся машины, который мы можем использовать в качестве генератора ветровой турбины, называемый индукционным генератором .
Как синхронный генератор, так и индукционный генератор имеют аналогичное фиксированное расположение обмоток статора, которое при возбуждении от вращающегося магнитного поля выдает трехфазное (или однофазное) выходное напряжение.
Однако роторы двух машин сильно различаются: ротор индукционного генератора обычно состоит из двух типов компоновки: «беличья клетка» или «ротор с обмоткой».
Однофазный индукционный генератор
Индукционный генератор Конструкция основана на очень распространенном асинхронном двигателе с короткозамкнутым ротором, поскольку они дешевы, надежны и легко доступны в широком диапазоне электрических размеров от машин с дробной мощностью до нескольких мегаватт, что делает их идеальными для использование как в бытовых, так и в коммерческих ветроэнергетических установках с использованием возобновляемых источников энергии.
Кроме того, в отличие от предыдущего синхронного генератора, который должен быть «синхронизирован» с электрической сетью, прежде чем он сможет вырабатывать электроэнергию, индукционный генератор может быть подключен непосредственно к электросети и приводиться в движение лопастями ротора турбин при переменной скорости ветра, если введен в эксплуатацию с неподвижного состояния.
Для экономии и надежности во многих ветроэнергетических турбинах в качестве генератора используются асинхронные двигатели, приводимые в действие механической коробкой передач для увеличения скорости вращения, производительности и эффективности. Однако индукционным генераторам требуется реактивная мощность, обычно обеспечиваемая шунтирующими конденсаторами в отдельных ветряных турбинах.
Асинхронные машины также известны как Асинхронные машины , то есть они вращаются ниже синхронной скорости при использовании в качестве двигателя и выше синхронной скорости при использовании в качестве генератора.Поэтому, когда он вращается быстрее, чем его нормальная рабочая скорость или скорость холостого хода, индукционный генератор вырабатывает электричество переменного тока. Поскольку индукционный генератор синхронизируется непосредственно с основной энергосистемой, то есть вырабатывает электроэнергию с той же частотой и напряжением, выпрямители или инверторы не требуются.
Однако индукционный генератор может обеспечивать необходимую мощность непосредственно в энергосистему общего пользования, но ему также необходима реактивная мощность, обеспечиваемая электросетью.Автономная (автономная) работа индукционного генератора также возможна, но недостатком здесь является то, что генератор требует дополнительных конденсаторов, подключенных к его обмоткам для самовозбуждения.
Трехфазные индукционные машины очень хорошо подходят для выработки энергии ветра и даже гидроэлектроэнергии. Индукционные машины, работая как генераторы, имеют неподвижный статор и вращающийся ротор, как и у синхронного генератора. Однако возбуждение (создание магнитного поля) ротора выполняется по-другому, и типичная конструкция ротора представляет собой структуру с короткозамкнутым ротором, в которой проводящие стержни встроены в корпус ротора и соединены друг с другом на своих концах посредством закорачивающих колец, как показано. .
Конструкция индукционного генератора
Как уже упоминалось в начале, одним из многих преимуществ асинхронной машины является то, что ее можно использовать в качестве генератора без каких-либо дополнительных схем, таких как возбудитель или регулятор напряжения, когда она подключена к трехфазной сети. Когда неработающий асинхронный генератор подключен к сети переменного тока, в обмотке ротора индуцируется напряжение, аналогичное трансформатору с частотой этого индуцированного напряжения, равной частоте приложенного напряжения.
Поскольку проводящие стержни ротора с короткозамкнутым ротором закорочены, вокруг них протекает большой ток, и внутри ротора создается магнитное поле, заставляющее машину вращаться.
Поскольку магнитное поле обоймы ротора следует за магнитным полем статора, ротор ускоряется до синхронной скорости, установленной частотой питания сети. Чем быстрее вращается ротор, тем меньше результирующая относительная разница скоростей между обоймой ротора и вращающимся полем статора и, следовательно, напряжение, наведенное на его обмотку.
Когда ротор приближается к синхронной скорости, он замедляется, поскольку ослабляющее магнитное поле ротора недостаточно для преодоления потерь на трение ротора в режиме холостого хода. В результате ротор теперь вращается медленнее, чем синхронная скорость. Это означает, что асинхронная машина никогда не сможет достичь своей синхронной скорости, так как для ее достижения не будет индуцированного тока в короткозамкнутом роторе, магнитного поля и, следовательно, крутящего момента.
Разница в скорости вращения между вращающимся магнитным полем статоров и скоростью ротора называется в асинхронных машинах «скольжением».Для обеспечения крутящего момента на валу ротора должно существовать проскальзывание. Другими словами, «проскальзывание», которое является описательным способом объяснения того, как ротор постоянно «откатывается» от синхронизации, представляет собой разницу в скорости между синхронными скоростями статоров, выражаемую как: n с = / P в об / мин, а фактическая частота вращения роторов n R также в об / мин и выражается в процентах (скольжение в%).
Тогда относительное скольжение s асинхронной машины определяется как:
Это скольжение означает, что работа индукционных генераторов, таким образом, является «асинхронной» (несинхронизированной), и чем больше нагрузка на асинхронный генератор, тем выше результирующее скольжение, поскольку для более высоких нагрузок требуются более сильные магнитные поля.Большее скольжение связано с большим наведенным напряжением, большим током и более сильным магнитным полем.
Таким образом, для того, чтобы асинхронная машина работала как двигатель, ее рабочая скорость всегда будет меньше скорости вращения поля статора, а именно синхронной скорости. Чтобы асинхронная машина работала как генератор, ее рабочая скорость должна быть выше номинальной синхронной скорости, как показано на рисунке.
Характеристики крутящего момента / скорости индукционной машины
В состоянии покоя вращающееся магнитное поле статора имеет одинаковую скорость вращения как по отношению к статору, так и по отношению к ротору, поскольку частота токов ротора и статора одинакова, поэтому в состоянии покоя скольжение положительно и равно единице (s = + 1).
При точно синхронной скорости разница между скоростью вращения и частотой ротора и статора будет равна нулю, поэтому при синхронной скорости никакая электрическая энергия не потребляется и не производится, и поэтому скольжение двигателя равно нулю (s = 0) .
Если частота вращения генератора превышает эту синхронную скорость с помощью внешних средств, результирующий эффект будет заключаться в том, что ротор будет вращаться быстрее, чем вращающееся магнитное поле статора, и полярность индуцированного напряжения и тока ротора изменится на противоположную.
В результате скольжение теперь становится отрицательным (s = -1), и индукционная машина генерирует ток с опережающим коэффициентом мощности обратно в электрическую сеть. Мощность, передаваемая в виде электромагнитной силы от ротора к статору, может быть увеличена простым вращением ротора быстрее, что затем приведет к увеличению количества вырабатываемой электроэнергии. Характеристики крутящего момента асинхронного генератора (s = от 0 до -1) являются отражением характеристик асинхронного двигателя (s = от +1 до 0), как показано.
Скорость индукционного генератора будет изменяться в зависимости от силы вращения (момента или крутящего момента), приложенной к нему энергией ветра, но он будет продолжать вырабатывать электричество до тех пор, пока его скорость вращения не упадет ниже скорости холостого хода. На практике разница между скоростью вращения при пиковой генерирующей мощности и на холостом ходу (синхронная скорость) очень мала, всего несколько процентов от максимальной синхронной скорости. Например, 4-полюсный генератор с синхронной частотой вращения холостого хода 1500 об / мин, подключенный к электросети с током 50 Гц, может производить максимальную генерируемую мощность, вращаясь только на 1–5% выше (от 1515 до 1575 об / мин). , легко достигается с помощью коробки передач.
Это очень полезное механическое свойство: генератор будет немного увеличивать или уменьшать свою скорость при изменении крутящего момента. Это означает, что редуктор будет меньше изнашиваться, что снижает потребность в техническом обслуживании и увеличивает срок службы, и это одна из наиболее важных причин для использования индукционного генератора , а не синхронного генератора на ветряной турбине, которая подключается напрямую. к электросети.
Автономная индукционная машина
Выше мы видели, что индукционный генератор требует, чтобы статор был намагничен от электросети, прежде чем он сможет вырабатывать электричество.Но вы также можете запустить индукционный генератор в автономной автономной системе, подав необходимый противофазный ток возбуждения или намагничивания от конденсаторов возбуждения, подключенных к клеммам статора машины. Это также требует наличия некоторого остаточного магнетизма в пластинах железа ротора при запуске турбины. Типичная схема трехфазной индукционной машины с короткозамкнутым ротором для автономного использования показана ниже. Конденсаторы возбуждения показаны звездой (звездой), но также могут быть подключены треугольником (треугольником).
Конденсаторный индукционный генератор
Конденсаторы возбуждения представляют собой стандартные конденсаторы для запуска двигателя, которые используются для обеспечения необходимой реактивной мощности для возбуждения, которая в противном случае обеспечивалась бы электросетью. Индукционный генератор будет самовозбуждаться при использовании этих внешних конденсаторов только в том случае, если ротор имеет достаточный остаточный магнетизм.
В режиме самовозбуждения на выходную частоту и напряжение генератора влияют частота вращения, нагрузка турбины и значение емкости конденсаторов в фарадах.Затем, чтобы произошло самовозбуждение генератора, должна быть минимальная скорость вращения для значения емкости, используемой на обмотках статора.
«Самовозбуждающийся индукционный генератор» (SEIG) является хорошим кандидатом для применения в ветроэнергетических установках, особенно при переменной скорости ветра и в удаленных районах, поскольку им не требуется внешний источник питания для создания магнитного поля. Трехфазный индукционный генератор можно преобразовать в однофазный индукционный генератор с регулируемой скоростью, подключив два конденсатора возбуждения к трехфазным обмоткам.Одно из значений емкости C на одной фазе и другое значение 2C емкости на другой фазе, как показано.
Однофазный выход от трехфазного индукционного генератора
При этом генератор будет работать более плавно, работая с коэффициентом мощности (PF), близким к единице (100%). В однофазном режиме можно получить КПД, близкий к трехфазному, что составляет примерно 80% от максимального номинала машины. Однако следует соблюдать осторожность при преобразовании трехфазного источника питания в однофазный, так как выходное линейное напряжение однофазной сети будет вдвое больше номинального напряжения обмотки.
Индукционные генераторыхорошо работают с однофазными или трехфазными системами, подключенными к электросети, или в качестве автономных генераторов с самовозбуждением для небольших ветроэнергетических установок, позволяющих работать с переменной скоростью. Однако индукционным генераторам требуется реактивное возбуждение для работы на полной мощности, поэтому они идеально подходят для подключения к коммунальной сети как часть связанной с сетью ветроэнергетической системы.
Чтобы узнать больше об «индукционных генераторах» или получить дополнительную информацию об энергии ветра о различных доступных ветроэнергетических системах, или изучить преимущества и недостатки использования индукционных генераторов как части системы ветряных турбин, подключенных к сети, нажмите здесь, чтобы получить Ваш экземпляр одной из лучших книг по трехфазным индукционным генераторам с самовозбуждением прямо от Amazon.
Асинхронный двигатель | КСБ
Асинхронный двигатель имеет пассивный ротор, который закорочен постоянно (короткозамкнутый ротор) или временно (см. Ротор с контактным кольцом). Он может производить до нескольких мегаватт и чаще всего используется в качестве стандартного трехфазного двигателя в промышленных приложениях.
Магнитное поле в асинхронном двигателе создается током намагничивания, передаваемым через предоставленную электрическую энергию. Асинхронные двигатели характеризуются скольжением, т.е.е. зависящая от нагрузки разница между скоростью вращения ротора и скоростью вращающегося поля питающего напряжения.
Ротор представляет собой металлическую клетку с осевыми стержнями, расположенными симметрично по кругу и прикрепленными к кольцу короткого замыкания (концевому кольцу) на каждом конце.
Статор состоит из распределенных катушек, которые индуцируют напряжение в стержнях ротора (см. Индукция) посредством вращающегося магнитного поля. Это приводит к сильному протеканию тока в короткозамкнутых стержнях, который создает силу между ротором и статором в магнитном поле и приводит к электромагнитному взаимодействию, ответственному за асинхронизм.Асинхронные двигатели подвержены значительным потерям в статоре и роторе.
В двигателях с контактным ротором трехфазная обмотка ротора подключается к переменным резисторам, обычно используемым в качестве жидкостных пускателей, через контактные кольца. Такая конструкция обеспечивает плавный процесс пуска, который не создает ударной нагрузки на сеть электропитания и позволяет в определенной степени изменять скорость. Однако это также приводит к значительным потерям мощности.
Обмотки ротора с короткозамкнутым ротором обычно состоят из одно- или двухпроводных шин, закороченных на концах кольцевым проводником.Роторы с короткозамкнутым ротором очень просты по конструкции, надежны и не требуют обслуживания. См. Рис.1 Асинхронный двигатель
Рис.1 Асинхронный двигатель: Асинхронный двигатель в разрезе
В отношении контакта с водой различают двигатели с сухим ротором, погружные двигатели и двигатели с мокрым ротором. См. Рис.2 Асинхронный двигатель
| Внутреннее смачивание | Внешнее смачивание | ||||
|---|---|---|---|---|---|
| Ротор | Обмотка | Сухой корпус | Влажный корпус (погружной 907 9045 9045 Сухой двигатель) | 9045 СухойСухой двигатель (с защитой от проникновения воды или без нее) | Сухой (заполненный воздухом) погружной двигатель |
| Влажный (двигатель с мокрым ротором) | Сухой двигатель (герметичный двигатель) | Двигатель с мокрым ротором насоса с мокрым ротором | Полностью погружной двигатель (заполненный жидкостью) | ||
Рис.2 Асинхронный двигатель: Обозначение асинхронных двигателей в зависимости от влажности
Сухой двигатель имеет различные типы защиты от проникновения воды (см. Тип защиты).
Погружной электродвигатель частично или полностью погружен в воду и обычно устанавливается в вертикальном положении. Тепло, вырабатываемое двигателем, передается непосредственно окружающей обрабатываемой жидкости. Его отличительной особенностью является корпус двигателя, который смачивается снаружи (см. Погружной электронасос).Внутреннее смачивание и глубина погружения отличают погружные двигатели с масляным или воздушным наполнением для малых и средних глубин погружения (погружные насосы для сточных вод) от полностью погружных двигателей.
См. Рис. 3, 4 Насос для сточных вод
Полностью погружные двигатели смачиваются жидкостью, находящейся внутри и снаружи. Они рассчитаны на любую глубину погружения и, прежде всего, используются в скважинах (см. Погружные скважинные насосы), поэтому они имеют небольшой диаметр и относительно длинные.Полностью погружные двигатели могут быть оснащены мокрой обмоткой статора (включая водонепроницаемую пластиковую изоляцию) или, в сочетании с корпусом, сухой обмоткой (см.