Частота вращения ротора коллекторного электродвигателя зависит от
Коллекторные двигатели переменного тока достаточно широко применяются как силовые агрегаты бытовой техники, ручного электроинструмента, электрооборудования автомобилей, систем автоматики. Схема подключения двигателя, а также его устройство напоминают схему и устройство электродвигателя постоянного тока с последовательным возбуждением.
Область применения таких моторов обусловлена их компактностью, малым весом, легкостью управления, сравнительно невысокой стоимостью. Наиболее востребованы в этом производственном сегменте электродвигатели малой мощности с высокой частотой вращения.
- Особенности конструкции и принцип действия
- Упрощенная схема подключения
- Управление работой двигателя
- Преимущества и недостатки
- Типичные неисправности
Особенности конструкции и принцип действия
По сути, коллекторный двигатель представляет собой достаточно специфичное устройство, обладающее всеми достоинствами машины постоянного тока и, в силу этого, обладающее схожими характеристиками.
Могут быть как одно-, так и трехфазными; благодаря способности работать от постоянного и переменного тока называются ещё универсальными. Кроме статора и ротора конструкция включает щеточно-коллекторный механизм и тахогенератор. Вращение ротора в коллекторном электродвигателе возникает в результате взаимодействия тока якоря и магнитного потока обмотки возбуждения. Через щетки ток подается на коллектор, собранный из пластин трапецеидального сечения и является одним из узлов ротора, последовательно соединенного с обмотками статора.
В целом принцип работы коллекторного мотора можно наглядно продемонстрировать с помощью известного со школы опыта с вращением рамки, помещенной между полюсами магнитного поля. Если через рамку протекает ток, она начинает вращаться под действием динамических сил. Направление движения рамки не меняется при изменении направления движения тока в ней.
Если через рамку протекает ток, она начинает вращаться под действием динамических сил. Направление движения рамки не меняется при изменении направления движения тока в ней.
Последовательное подсоединение обмоток возбуждения дает большой максимальный момент, но появляются большие обороты холостого хода, способные привести к преждевременному выходу механизма из строя.
Упрощенная схема подключения
Типовая схема подключения может предусматривать до десяти выведенных контактов на контактной планке. Ток от фазы L протекает до одной из щеток, затем передается на коллектор и обмотку якоря, после чего проходит вторую щетку и перемычку на обмотки статора и выходит на нейтраль N. Такой способ подключения не предусматривает реверс двигателя вследствие того, что последовательное подсоединение обмоток ведет к одновременной замене полюсов магнитных полей и в результате момент всегда имеет одно направление.
Направление вращения в этом случае можно изменить, только поменяв местами выхода обмоток на контактной планке. Включение двигателя «напрямую» выполняется только с подсоединенными выводами статора и ротора (через щеточно-коллекторный механизм). Вывод половины обмотки используется для включения второй скорости. Следует помнить, что при таком подключении мотор работает на полную мощность с момента включения, поэтому эксплуатировать его можно не более 15 секунд.
Включение двигателя «напрямую» выполняется только с подсоединенными выводами статора и ротора (через щеточно-коллекторный механизм). Вывод половины обмотки используется для включения второй скорости. Следует помнить, что при таком подключении мотор работает на полную мощность с момента включения, поэтому эксплуатировать его можно не более 15 секунд.
Управление работой двигателя
На практике используются двигатели с различными способами регулирования работы. Управление коллекторным мотором может осуществляться с помощью электронной схемы, в которой роль регулирующего элемента выполняет симистор, «пропускающий» заданное напряжение на мотор. Симистор работает, как быстросрабатывающий ключ, на затвор которого приходят управляющие импульсы и открывают его в заданный момент.
В схемах с использованием симистора реализован принцип действия, основанный на двухполупериодном фазовом регулировании, при котором величина подаваемого на мотор напряжения привязана к импульсам, поступающим на управляющий электрод. Частота вращения якоря при этом прямо пропорциональна приложенному к обмоткам напряжению. Принцип работы схемы управления коллекторным двигателем упрощенно описывается следующими пунктами:
Частота вращения якоря при этом прямо пропорциональна приложенному к обмоткам напряжению. Принцип работы схемы управления коллекторным двигателем упрощенно описывается следующими пунктами:
- электронная схема подает сигнал на затвор симистора;
- затвор открывается, по обмоткам статора течет ток, придавая вращение якорю М двигателя;
- тахогенератор преобразует в электрические сигналы мгновенные величины частоты вращения, в результате формируется обратная связь с импульсами управления;
- в результате ротор вращается равномерно при любых нагрузках;
- реверс электродвигателя осуществляется с помощью реле R1 и R
Помимо симисторной существует фазоимпульсная тиристорная схема управления.
Преимущества и недостатки
К неоспоримым достоинствам таких машин следует отнести:
- компактные габариты;
- увеличенный пусковой момент; «универсальность» — работа на переменном и постоянном напряжении;
- быстрота и независимость от частоты сети;
- мягкая регулировка оборотов в большом диапазоне с помощью варьирования напряжения питания.

Недостатком этих двигателей принято считать использование щеточно-коллекторного перехода, который обуславливает:
- снижение долговечности механизма;
- искрение между и коллектором и щетками;
- повышенный уровень шумов;
- большое количество элементов коллектора.
Типичные неисправности
Наибольшего внимания к себе требует щеточно-коллекторный механизм, в котором наблюдается искрение даже при работе нового двигателя. Сработанные щетки следует заменить для предотвращения более серьезных неисправностей: перегрева ламелей коллектора, их деформации и отслаивания. Кроме того, может произойти межвитковое замыкание обмоток якоря или статора, в результате которого происходит значительное падение магнитного поля или сильное искрение коллекторно-щеточного перехода.
Избежать преждевременного выхода из строя универсального коллекторного двигателя может грамотная эксплуатация устройства и профессионализм изготовителя в процессе сборки изделия.
Источник: electricvdele.ru
Коллекторный двигатель: Устройство, виды и принцип работы
Большое количество оборудования имеет силовые установки, работающие от электрической сети питания. Коллекторный двигатель это силовая установка, преобразующая электрическую энергию в физическую силу. Отличие коллекторного двигателя от бесколлекторного состоит в наличии коллекторно-щеточного узла.
Виды коллекторных двигателей
В зависимости от источника тока, к которому подключается мотор, коллекторные установки делят на два вида:
- Работающий от источника постоянного тока. Используются в автомобилях, самоходной технике, детских игрушках и т.д. Отличаются простотой конструкции. Подключаются только к источнику постоянного тока;
- Универсальный коллекторный двигатель. Работает как от постоянного, так и от переменного тока. Применяется в бытовых электрических приборах.
СПРАВКА: Универсальный коллекторный силовой агрегат отличается простотой конструкции и небольшими габаритно массовыми параметрами.
Благодаря этому может быть использован в качестве силовой установки ручного инструмента.
В зависимости от максимальной мощности силовые установки делятся на три типа:
- Небольшой мощности. Используются в детских игрушках, аудио – видеотехнике и т.д. Напряжение питания таких установок составляет от 1.5 до 9 Вольт. Оси якоря устанавливаются на специализированные втулки. Они играют роль подшипников скольжения. Токопроводящие щетки выполнены в виде двух пластин;
- Средней мощности. Якорь устанавливается на втулках или подшипниках. Применяются на автомобильной и самоходной технике. Напряжение питания составляет от 12 до 24 вольта;
- Высокой мощности. Отличаются высокими показателями мощности и наличием электрических магнитов.
Устройство коллекторного двигателя
Для того чтобы понять как работает коллекторный двигатель, необходимо разобраться в его конструкции. Независимо от вида силового агрегата он состоит из следующих основных элементов:
- Якорь.
 Состоит из металлического вала, на который установлены обмотки. Вал устанавливается на подшипниках скольжения или качения в корпусе мотора. Якорь является движущейся частью мотора, которая передаёт крутящий момент к необходимому оборудованию;
Состоит из металлического вала, на который установлены обмотки. Вал устанавливается на подшипниках скольжения или качения в корпусе мотора. Якорь является движущейся частью мотора, которая передаёт крутящий момент к необходимому оборудованию; - Коммутатор (коллектор). Необходим для определения положения якоря. Располагается на роторе. Выполнен в виде медных контактов трапециевидного сечения;
- Щётки. Изготовлены из графита. Щетки используются для подачи напряжения к обмоткам ротора;
- Держатели щёток. Изготавливаются из металла или пластика. Держатели щёток устанавливаются на корпус мотора при помощи не проводящих ток прокладок. Такая конструкция исключает подачу напряжения на корпус мотора;
ВАЖНО: Щётки или держатели оснащаются пружинами. Они необходимы для прижимания щетки к коллектору во время работы силовой установки.
- Подшипники. На небольших моторах используются пластиковые или металлические втулки.
 Мотор оборудован двумя подшипниками. Они необходимы для нормального вращения вала якоря;
Мотор оборудован двумя подшипниками. Они необходимы для нормального вращения вала якоря; - Сердечник статора. Изготавливается из большого количества металлических пластин;
- Обмотки. Необходимы для создания магнитного поля.
Принцип работы коллекторного двигателя
Коллекторный двигатель переменного тока 220 Вольт и мотор постоянного тока, преобразуют электрическую энергию в физическую силу. Создание физической силы осуществляется путём раскручивания якоря, установленного на двух подшипниках в корпусе мотора.
Ротор и статор силового агрегата имеют обмотки. Они изготовлены из провода. Во избежание замыкание витков обмотки между собой провод выполнен в изолирующей оболочке. Напряжение подается на обмотку статора при помощи провода.
Якорь коллекторного мотора подвижный. Для передачи напряжения на обмотку якоря используется коллектор.
Он выполнен в виде медных контактов. На них передаётся напряжение через графитовые щетки. Такая конструкция позволяет передавать напряжение на обмотку якоря независимо от скорости его вращения.
При прохождении электрического тока через обмотки возникает магнитное поле. Обмотка якоря имеет магнитное поле противоположной полярности полю обмотки статора. Под воздействием электромагнитных полей разной полярности якорь двигателя начинает вращаться.
ВНИМАНИЕ: Коллекторный двигатель может быть использован в качестве генератора постоянного тока.
Варианты обмоток возбуждения
Подключить коллекторный двигатель постоянного тока можно несколькими способами. Возбуждение мотора зависит от способа подключения обмоток.
- Независимое подключение. Обмотки мотора постоянного тока подключаются отдельно. Для подключения используется два источника постоянного тока. Обмотка статора оснащается реостатом. Он необходим для установки необходимой частоты вращения ротора. Обмотка ротора оборудуется пусковым реостатом. Он нужен для контроля над силой тока в обмотке ротора при запуске силовой установки;
- Параллельное подключение. Питание обмоток якоря и статора осуществляется от одного и того же источника питания.
 Обмотки оснащены регуляторами;
Обмотки оснащены регуляторами; - Последовательно-соединенное. Электродвигатель такой конструкции имеет обмотку статора, последовательно подключенную с обмоткой якоря. Ротор может быть оснащен регулятором, необходимым для ограничения силы тока при запуске. Статор оснащается реостатом, регулирующим в частоту вращения вала.
ВАЖНО: Использование коллекторного мотора с последовательным подключением без нагрузки, может привести к выходу его из строя.
- Смешанное возбуждение. Данная конструкция использует две катушки подключенные параллельно, и последовательно одновременно.
Преимущества и недостатки коллекторного двигателя
Однофазный коллекторный двигатель переменного тока или аналогичный работающий от источника постоянного тока имеют плюсы и минусы.
- Однофазный мотор коллекторного типа ( универсальный), можно подключить к любой сети питания. Такая конструкция позволяет использовать мотор от источника питания переменного тока, без использования выпрямителей;
- В отличие от бесколлекторных двигателей, модели с коллекторами имеют небольшие размеры.
 Это позволяет использовать силовые установки для монтажа на электрический инструмент, детские игрушки, и т.п;
Это позволяет использовать силовые установки для монтажа на электрический инструмент, детские игрушки, и т.п; - Небольшая сила тока при запуске. Позволяет использовать моторы от бытовой сети питания;
- Простота регулировки вращения вала ротора. Для управления оборотами применяется реостат. При выходе из строя регулятора, мотор останется работоспособным;
- Необходимость регулярного обслуживания. Графитовые щетки при длительной работе стираются. Необходимо вовремя менять щетки на новые. Нарушение этого правила может привести к выходу из строя коллектора;
- Отсутствие стабильности показателей мощности. При изменении нагрузки на якорь показатели мощности силового агрегата могут изменяться.
Возможные поломки и способы их ремонта
В результате работы коллекторного двигателя могут возникнуть неисправности. Большинство из них самостоятельно сможет устранить человек не имеющий специализированных технических знаний и оборудования. Ниже представлены наиболее часто возникающие неисправности.
Повышенный шум при работе узла. Сильный уровень шума при работе мотора может свидетельствовать о выходе из строя подшипников, на которые установлен якорь.
При выходе из строя подшипников качения необходимо заменить изношенные детали новыми.
Износ щёток. Критическая изношенность щёток сопровождается повышенным уровнем шума при работе. Несвоевременная замена может привести к поломке коллектора. При возникновении неисправности необходимо заменить графитовые щётки. При выборе щёток необходимо обратить внимание на их толщину. Новые детали не должны застревать в держателях.
Отсутствие вращения якоря при подключении мотора к сети питания. Отсутствие вращения может возникнуть в результате обрыва цепи питания. Обрыв может произойти в результате поломки пружины прижимающей щётку к коллектору или при обрыве провода. При поломке пружины необходимо заменить ее новой деталью. При обрыве провода необходимо восстановить его целостность.
Отсутствие вращения ротора может возникнуть в результате выхода из строя предохранителя. Для восстановления работоспособности необходимо установить новый предохранитель. Перед установкой предохранителя необходимо определить причину, по которой старое устройство вышло из строя. После устранения причины можно установить предохранитель и провести испытание двигателя.
Для восстановления работоспособности необходимо установить новый предохранитель. Перед установкой предохранителя необходимо определить причину, по которой старое устройство вышло из строя. После устранения причины можно установить предохранитель и провести испытание двигателя.
Отсутствие регулировки вращения вала якоря. После запуска агрегат работает на максимальных оборотах. Такая неисправность возникает в результате поломки реостата. Для восстановления работоспособности двигателя необходимо заменить регулятор.
Медленное вращение ротора. Снижение частоты вращения вала может возникнуть в результате низкого напряжения в сети питания. Необходимо проверить напряжение. Снижение оборотов якоря может быть спровоцировано высокой нагрузкой. Необходимо снизить нагрузку на якорь.
Из вышеперечисленного следует, что коллекторный мотор преобразовывает электрическую энергию в физическую силу. Для передачи напряжения к обмоткам якоря используются щётки. Моторы отличаются простотой конструкции и небольшими габаритно массовыми параметрами.
Источник: toptexnik.ru
Коллекторный двигатель постоянного и переменного тока
В бытовом электрооборудовании, где используются электродвигатели, как правило, устанавливаются электромашины с механической коммутацией. Такой тип двигателей называют коллекторными (далее КД). Предлагаем рассмотреть различные виды таких устройств, их принцип действия и конструктивные особенности. Мы также расскажем о достоинствах и недостатках каждого из них, приведем примеры сферы применения.
Что такое коллекторный двигатель?
Под таким определением подразумевается электромашина, преобразовывающая электроэнергию в механическую, и наоборот. Конструкция устройства предполагает наличие хотя бы одной обмотки подсоединенной к коллектору (см. рис. 1).
Рисунок 1. Коллектор на роторе электродвигателя (отмечен красным)
В КД данный элемент конструкции используется для переключения обмоток и в качестве датчика, позволяющего определить положение якоря (ротора).
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.
Данное исполнение характерно практически для всех КД.
Конструкция универсального коллекторного двигателя
Обозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
У устройств данного типа, возбуждение может быть последовательным и параллельным, но поскольку последний вариант сейчас не производят, мы его не будем рассматривать. Что касается универсальных КД последовательного возбуждения, то типовая схема таких электромашин представлена ниже.
Схема универсального коллекторного двигателя
Универсальный КД может работать от переменного напряжения благодаря тому, что когда происходит смена полярности, ток в обмотках возбуждения и якоря также меняет направление.
В результате этого вращательный момент не изменяет своего направления.
Особенности и область применения универсальных КД
Основные недостатки данного устройства проявляются при его подключении к источникам переменного напряжения, что отражается в следующем:
- снижение КПД;
- повышенное искрообразование в щеточно-коллекторном узле, и как следствие, его быстрый износ.
Ранее КД широко применялись, во многих бытовых электроприборах (инструмент, стиральные машины, пылесосы и т.д.). На текущий момент производители практически престали использовать данный тип двигателей отдав предпочтение безколлекторным электромашинам.
Теперь рассмотрим коллекторные электромашины, работающие от источников постоянного напряжения.
КД с индуктором на постоянных магнитах
Конструктивно такие электромашины отличаются от универсальных тем, что вместо катушек возбуждения используются постоянные магниты.
Конструкция коллекторного двигателя на постоянных магнитах и его схема
Этот вид КД получил наибольшее распространение по сравнению с другими электромашинами данного типа. Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Основная сфера применения – маломощные приводы для различного оборудования, часто используется в детских игрушках.
КД на постоянных магнитах с игрушки времен СССР
К числу преимуществ можно отнести следующие качества:
- высокий момент силы даже на низкой частоте оборотов;
- динамичность управления;
- низкая стоимость.
Основные недостатки:
- малая мощность;
- потеря магнитами своих свойств от перегрева или с течением времени.
Для устранения одного из основных недостатков данных устройств (старения магнитов) в системе возбуждения используются специальные обмотки, перейдем к рассмотрению таких КД.
Независимые и параллельные катушки возбуждения
Первые получили такое название вследствие того, что обмотки индуктора и якоря не подключаются друг к другу и запитываются отдельно (см. А на рис. 6).
Рисунок 6. Схемы КД с независимой (А) и параллельной (В) обмоткой возбуждения
Особенность такого подключения заключается в том, что питание U и UK должны отличаться, в противном случае н возникнет момент силы. Если невозможно организовать такие условия, то катушки якоря и индуктора подключается параллельно (см. В на рис. 6). Оба вида КД обладают одинаковыми характеристиками, мы сочли возможным объединить их в одном разделе.
Момент силы у таких электромашин высокий при низкой частоте вращения и уменьшается при ее увеличении. Характерно, что токи якоря и катушки независимы, а общий ток является суммой токов, проходящих через эти обмотки. В результат этого, при падении тока катушки возбуждения до 0, КД с большой вероятностью выйдет из строя.
Сфера применения таких устройств – силовые установки с мощностью от 3 кВт.
Положительные черты:
- отсутствие постоянных магнитов снимает проблему их выхода из строя с течением времени;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Минусы:
- стоимость выше, чем у устройств на постоянных магнитах;
- недопустимость падения тока ниже порогового значения на катушке возбуждения, поскольку это приведет к поломке.
Последовательная катушка возбуждения
Схема такого КД представлена на рисунке ниже.
Схема КД с последовательным возбуждением
Поскольку обмотки включены последовательно, то ток в них будет равным. В результате этого, когда ток в обмотке статора становится меньше, чем номинальный (это происходит при небольшой нагрузке), уменьшается мощность магнитного потока. Соответственно, когда нагрузка увеличивается, пропорционально увеличивается мощность потока, вплоть до полного насыщения магнитной системы, после чего эта зависимость нарушается.
То есть, в дальнейшем рост тока в обмотке катушки якоря не приводит к увеличению магнитного потока.
Указанная выше особенность проявляется в том, что КД данного типа непозволительно запускать при нагрузке на четверть меньше номинальной. Это может привести к тому, что ротор электромашины резко увеличит частоту вращения, то есть, двигатель пойдет «в разнос». Соответственно, такая особенность вносит ограничения на сферу применения, например, в механизмах с ременной передачей. Это связано с тем, что при ее обрыве электромашина начинает работать в холостом режиме.
Указанная особенность не распространяется на устройства, чья мощность менее 200 Вт, для них допустимы падения нагрузки вплоть до холостого режима работы.
Преимущества КД с последовательной катушкой, такие же, как у предыдущей модели, за исключением простоты и динамичности управления. Что касается минусов, то к ним следует отнести:
- высокую стоимость в сравнении с аналогами на постоянных магнитах;
- низкий уровень момента силы при высокой частоте оборотов;
- поскольку обмотки статора и возбуждения подключены последовательно, возникают проблемы с управлением скоростью вращения;
- работа без нагрузки приводит к поломке КД.

Смешанные катушки возбуждения
Как видно из схемы, представленной на рисунке ниже, индуктор на КД данного типа обладает двумя катушками, подключенных последовательно и параллельно обмотке ротора.
Схема КД со смешанными катушками возбуждения
Как правило, одна из катушек обладает большей намагничивающей силой, поэтому она считается, как основная, соответственно, вторая – дополнительная (вспомогательная). Допускается встречное и согласованное включение катушек, в зависимости от этого интенсивность магнитного потока соответствует разности или сумме магнитных сил каждой обмотки.
При встречном включении характеристики КД становятся близкими к соответствующим показателям электромашин с последовательным или параллельным возбуждением (в зависимости от того, какая из катушек является основной). То есть, такое включение актуально, если необходимо получить результат в виде неизменной частоты оборотов или их увеличению при возрастании нагрузки.
Согласованное включение приводит к тому, что характеристики КД будут соответствовать среднему значению показателями электромашин с параллельными и последовательными катушками возбуждения.
Единственный недостаток такой конструкции – самая высокая стоимость в сравнении с другими типами КД. Цена оправдывается благодаря следующими положительными качествами:
- не устаревают магниты, за отсутствием таковых;
- малая вероятность выхода из строя при нештатных режимах работы;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Источник: www.asutpp.ru
Частота вращения ротора асинхронного двигателя
Читайте также:
- A — Статья ID ДВИГАТЕЛЯ/VIN Tex
- A — Статья ID ДВИГАТЕЛЯ/VIN Tex
- B. Построение второй детали – оси вращения колес
- U–образные и рабочие характеристики синхронного двигателя
- Аллотропия или полиморфные превращения.
- АСИНХРОННОГО ДВИГАТЕЛЯ
- Вероятность события. Частота события
- Влияние строения углеводородов, давления и температуры на фазовые превращения газоконденсатных систем.
- Возможности предотвращения войны в современную эпоху
- ВОЗНИКНОВЕНИЕ КРУТЯЩЕГО МОМЕНТА ДВИГАТЕЛЯ
- ВОЗНИКНОВЕНИЕ ЭФФЕКТИВНОЙ МОЩНОСТИ ДВИГАТЕЛЯ.

- Время запуска двигателя меньше 4с.
Регулирование частоты вращения асинхронных двигателей
Из этого выражения следует, что частоту вращения ротора асинхронного двигателя можно регулировать изменением какой — либо из трех величин: скольжения s, частоты тока в обмотке статора f1 или числа полюсов в обмотке статора 2р.
Регулирование частоты вращения изменением скольжения sвозможно тремя способами: изменением подводимого к обмотке статора напряжения, нарушением симметрии этого напряжения и изменением активного сопротивления обмотки ротора.
Регулировка частоты вращения изменением скольжения происходит только в нагруженном двигателе. В режиме холостого хода скольжение, а следовательно, и частота вращения остаются практически неизменными.
Регулирование частоты вращения изменением подводимого напряжения.Возможность этого способа регулирования подтверждается графиками М = f(s), построенными для разных значений U1 (см. рис. 13.5). При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети (см. § 13.2).
рис. 13.5). При неизменной нагрузке на валу двигателя увеличение подводимого к двигателю напряжения вызывает рост частоты вращения. Однако диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя, ограниченным значением критического скольжения и недопустимостью значительного превышения номинального значения напряжения. Последнее объясняется тем, что с превышением номинального напряжения возникает опасность чрезмерного перегрева двигателя, вызванного резким увеличением электрических и магнитных потерь. В то же время с уменьшением напряжения U1двигатель утрачивает перегрузочную способность, которая, как известно, пропорциональна квадрату напряжения сети (см. § 13.2).
Подводимое к двигателю напряжение изменяют либо регулировочным автотрансформатором, либо реакторами, включаемыми в разрыв линейных проводов.
Узкий диапазон регулирования и неэкономичность (необходимость в дополнительных устройствах) ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения.При нарушении симметрии подводимой к двигателю трехфазной системы напряжения вращающееся поле статора становится эллиптическим (см. § 9.4). При этом поле приобретает обратную составляющую (встречное поле), которая создает момент Мобр, направленный встречно вращающему моменту Мпр. В итоге результирующий электромагнитный момент двигателя уменьшается (М = Мпр — Мобр).
Механические характеристики двигателя при этом способе регулирования располагаются в зоне между характеристикой при симметричном напряжении (рис. 15.10, а, кривая 1) и характеристикой при однофазном питании двигателя (кривая 2) — пределом несимметрии трехфазного напряжения.
Для регулировки несимметрии подводимого напряжения можно в цепь одной из фаз включить однофазный регулировочный автотрансформатор (AT) (рис. 15.10, б). При уменьшении напряжения па выходе AT несимметрия увеличивается и частота вращения ротора уменьшается. Недостатками этого способа регулирования являются узкая зона
Недостатками этого способа регулирования являются узкая зона
Рис. 15.10. Механические характеристики (а) и схема включения (б) асинхронного двигателя при регулировании частоты вращения изменением симметрии трехфазной системы
регулирования и уменьшение КПД двигателя по мере увеличения несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора.Этот способ регулирования частоты вращения возможен лишь в двигателях с фазным ротором. Механические характеристики асинхронного двигателя, построенные для различных значений активного сопротивления цепи ротора (см. рис. 13.6), показывают, что с увеличением активного сопротивления ротора возрастает скольжение, соответствующее заданному нагрузочному моменту. Частота вращения двигателя при этом уменьшается. Зависимость скольжения (частоты вращения) от активного сопротивления цепи ротора выражается формулой, полученной преобразованием (13. 13):
13):
Практически изменение активного сопротивления цепи ротора достигается включением в цепь ротора регулировочного реостата (РР), подобного пусковому реостату (ПР) (см. рис. 15.2), но рассчитанного на длительный режим работы. Электрические потери в роторе пропорциональны скольжению (Рэ2 = sPэм), поэтому уменьшение частоты вращения (увеличение скольжения) сопровождается ростом электрических потерь в цепи ротора и снижением КПД двигателя. Так, если при неизменном нагрузочном моменте на валу двигателя увеличить скольжение от 0,02 до 0,5, что соответствует уменьшению частоты вращения примерно вдвое, то потери в цепи ротора составят почти половину электромагнитной мощности двигателя. Это свидетельствует о неэкономичности рассматриваемого способа регулирования. К тому же необходимо иметь в виду, что рост потерь в роторе сопровождается ухудшением условий вентиляции из-за снижения частоты вращения, что приводит к перегреву двигателя (см. § 31.1).
Рассматриваемый способ регулирования имеет еще и тот недостаток, что участок механической характеристики, соответствующий устойчивой работе двигателя, при введении в цепь ротора добавочного сопротивления становится более пологим и колебания нагрузочного момента на валу двигателя сопровождаются значительными изменениями частоты вращения ротора. Это иллюстрирует рис. 15.11, на котором видно, что если нагрузочный момент двигателя изменится на ΔМст = М / ст – М // ст, то изменение частоты
Это иллюстрирует рис. 15.11, на котором видно, что если нагрузочный момент двигателя изменится на ΔМст = М / ст – М // ст, то изменение частоты
Рис. 15.11. Влияние сопротивления цепи ротора на
колебания частоты вращения при изменении нагрузки
вращения при выведенном регулировочном реостате ( rд‘ = 0 ) составит Δn2I, а при введенном реостате — Δn2II. В последнем случае изменение частоты вращения значительно больше.
Но несмотря на указанные недостатки, рассмотренный способ регулирования частоты вращения широко применяется в асинхронных двигателях с фазным ротором. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным (при плавном изменении сопротивления РР) или ступенчатым (при ступенчатом изменении сопротивления РР).
Способ обеспечивает регулирование частоты вращения в широком диапазоне, но только вниз от синхронной частоты вращения. Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства (см. § 15.1).
Вместе с тем он обеспечивает двигателю улучшенные пусковые свойства (см. § 15.1).
Регулирование частоты вращения изменением частоты тока в статоре.Этот способ регулирования (частотное регулирование) основан на изменении синхронной частоты вращения n1 = f1 60/ р .
Для осуществления этого способа регулирования необходим источник питания двигателя переменным током с регулируемой частотой. В качестве таких источников могут применяться электромашинные, ионные или полупроводниковые преобразователи частоты (ПЧ). Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1. Но с изменением частоты f1 = ω1p/ (2π) будет изменяться и максимальный момент [см. (13.18)]. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и напряжение питания U1. Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением
Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением
U / 1 /U1 = (f1 / /f1) (15.4)
где U1 и М — напряжение и момент при частоте f1 ; U’1 и М’ -напряжение и момент при частоте f ‘1.
Если частота вращения двигателя регулируется при условии постоянства момента нагрузки ( М = М’ = const), то подводимое к двигателю напряжение необходимо изменять пропорционально изменению частоты тока:
При этом мощность двигателя увеличивается пропорционально нарастанию частоты вращения. Если же регулирование производится при условии постоянства мощности двигателя ( Рэм = Мω1 = const), то подводимое напряжение следует изменять в соответствии с законом
U’1 = U1 . (15.6)
Частотное регулирование двигателей позволяет плавно изменять частоту вращения в широком диапазоне (до 12:1). Однако источники питания с регулируемой частотой тока удорожают установку. Поэтому частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей). Но благодаря развитию силовой полупроводниковой техники в последние годы созданы устройства частотного регулирования, технико-экономические показатели которых оправдывают их индивидуальное применение для регулирования частоты вращения одиночных двигателей.
Однако источники питания с регулируемой частотой тока удорожают установку. Поэтому частотное регулирование до последнего времени применялось в основном для одновременного регулирования группы двигателей, работающих в одинаковых условиях (например, рольганговых двигателей). Но благодаря развитию силовой полупроводниковой техники в последние годы созданы устройства частотного регулирования, технико-экономические показатели которых оправдывают их индивидуальное применение для регулирования частоты вращения одиночных двигателей.
Дата добавления: 2014-12-27 ; Просмотров: 5317 ; Нарушение авторских прав? ;
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Источник: studopedia.su
Работа коллекторного электродвигателя переменного тока
В бытовой технике, ручном электроинструменте, автомобильном электрооборудовании и системах автоматики очень часто применяется коллекторный электродвигатель переменного тока, схема подключения которого, как и устройство схожи с двигателями постоянного возбуждения постоянного тока.
Столь распространенное применение их объясняется компактностью, небольшим весом, невысокой стоимостью и простотой управления. В этом сегменте наиболее востребованы двигатели с высокой частотой и малой мощностью.
Принцип работ и конструктивные особенности
Устройство это достаточно специфичное, обладающее в силу схожести с машинами постоянного тока, похожими характеристиками и присущими им достоинствами.
Отличие от двигателей постоянного тока состоит в материале корпуса статора, изготовленном из листов электротехнической стали, благодаря чему удается добиться снижения потерь на вихревые токи.
Чтобы двигатель мог работать от обычной сети, т.е. 220 в, обмотки возбуждения соединяются последовательно.
Эти двигатели, называемые универсальными благодаря тому, что работают они от переменного и постоянного тока, бывают одно- и трехфазными.
Видео: Универсальный коллекторный двигатель
Из чего состоит конструкция?
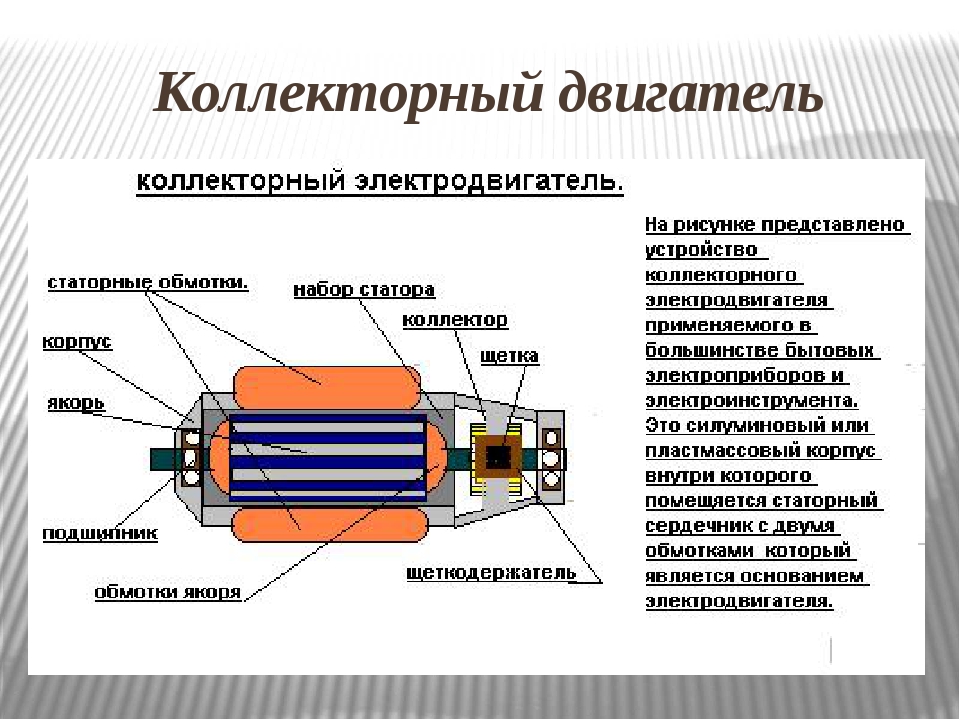
Устройство электродвигателя переменного тока включает помимо ротора и статора:
- тахогенератор;
- щеточно-коллекторный механизм.
Ток якоря взаимодействует с магнитным потоком обмотки возбуждения, вызывая в коллекторном механизме вращение ротора. Ток подается через щетки на коллектор, являющийся узлом ротора и соединенным с обмоткой статора последовательно. Он собран из пластин, имеющих в сечении форму трапеции.
Продемонстрировать принцип работы такого двигателя можно с помощью хорошо известного со школьной программы опыта с вращающейся рамкой, которую поместили между разноименными полюсами магнитного поля. Она вращается под воздействием динамических сил, когда по ней протекает ток. При изменении направления тока, рамка не меняет направления вращения.
Примести к выходу из строя механизма могут высокие обороты холостого хода, вызванные максимальным моментом при последовательном подсоединении обмоток возбуждения.
Схема подключения (упрощенная)
Типовая схема подключения предусматривает вывод на контактную планку до десяти контактов. Протекающий по одной из щеток ток L поступает на коллектор и якорь, затем переходит на обмотки статора через вторую щетку и перемычку, выходя на нейтраль N.
Реверса мотора подобный способ подключения не предусматривает, поскольку подсоединение обмоток параллельное приводит к одновременной смене полюсов магнитных полей. В итоге, направление момента всегда одинаково.
Рекомендуем:
Изменить направление вращения возможно, если поменять на контактной планке местами выхода обмоток. Напрямую двигатель включают, когда вывода ротора и статора подсоединены щеточно-коллекторный механизм. Для включения второй скорости используются выводы половины обмотки. Нельзя забывать, что с момента такого подключения мотор работает на максимальную мощность, поэтому время его эксплуатации не может превышать 15 секунд.
Видео: Подключение и регулировка оборотов двигателя от стиральной машины
Управление двигателем
На практике применяют различные способы регулирования работы двигателя. Это может быть электронная схема, где регулирующим элементом выступает симистор, который на мотор «пропускает» заданное напряжение. Работает он как мгновенно срабатывающий ключ, открываясь, когда на его затвор поступает управляющий импульс.
Это может быть электронная схема, где регулирующим элементом выступает симистор, который на мотор «пропускает» заданное напряжение. Работает он как мгновенно срабатывающий ключ, открываясь, когда на его затвор поступает управляющий импульс.
В основе принципа действия, реализованного в схемах с симистором, лежит двухполупериодное фазовое регулирование, где к импульсам, которые поступают на электрод, привязано напряжение, подаваемое на двигатель. При этом, частота, с которой вращается якорь, прямо пропорциональна напряжению, подаваемому на обмотки.
Упрощенно этот принцип можно описать такими пунктами:
- на затвор симистора подается сигнал от электронной схемы;
- затвор открывается, ток течет по обмоткам статора, вызывая вращение якоря мотора М;
- мгновенные величины частоты вращения преобразуются тахогенератором в электрические сигналы, формируя с импульсами управления обратную связь;
- как следствие, вращение ротора при любых нагрузках, остается равномерным;
- с помощью реле R и R1 осуществляется реверс мотора.

Другая схема – тиристорана фазоимпульсная.
Преимущества машин и недостатки
К достоинствам относят:
- небольшие размеры;
- универсальность, т.е. работу на напряжении постоянном и переменном;
- большой пусковой момент;
- независимость от сетевой частоты;
- быстроту;
- мягкую регулировку оборотом в широком диапазоне при варьировании напряжением питания.
Недостатки связаны и использованием щеточно-коллекторного перехода, влекущего:
- уменьшение срока службы механизма;
- возникновение между щетками и коллектором искры;
- высокий уровень шума;
- большое число коллекторных элементов.
Основные неисправности
Искрение, возникающее между щетками и коллектором – самый главный вопрос, требующий внимания. Чтобы избежать неисправностей более серьезных, таких как их отслаивание и деформация или перегрев ламелей, сработавшуюся щетку необходимо заменить.
Помимо этого, возможно замыкание между обмотками якоря и статора, вызывающее сильное искрение на переходе коллектор-щетка или значительное падение магнитного поля.
Чтобы продлить срок службы двигателя, необходимо соблюдение двух условий – профессиональный изготовитель и грамотный пользователь, т.е. строгое соблюдение режима работы.
Видео: Коллекторный электрический двигатель
Источник: motocarrello.ru
Как определить скорость вращения электродвигателя
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену.
 Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет. - Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.

- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т. д.) самая значимая – мощность. Зная главные данные, вы сможете:
д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя.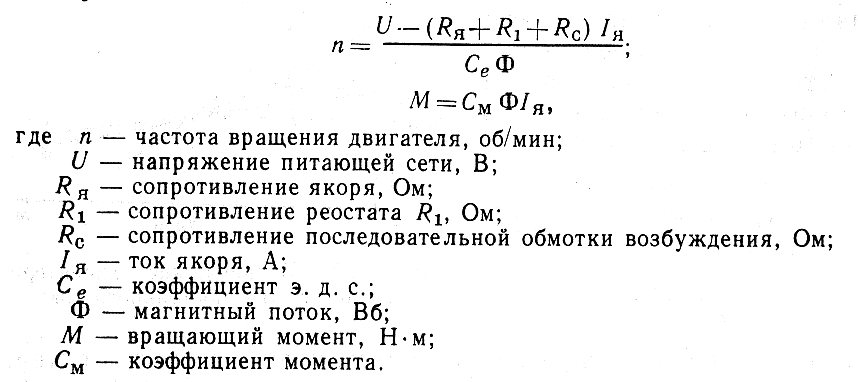 Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя.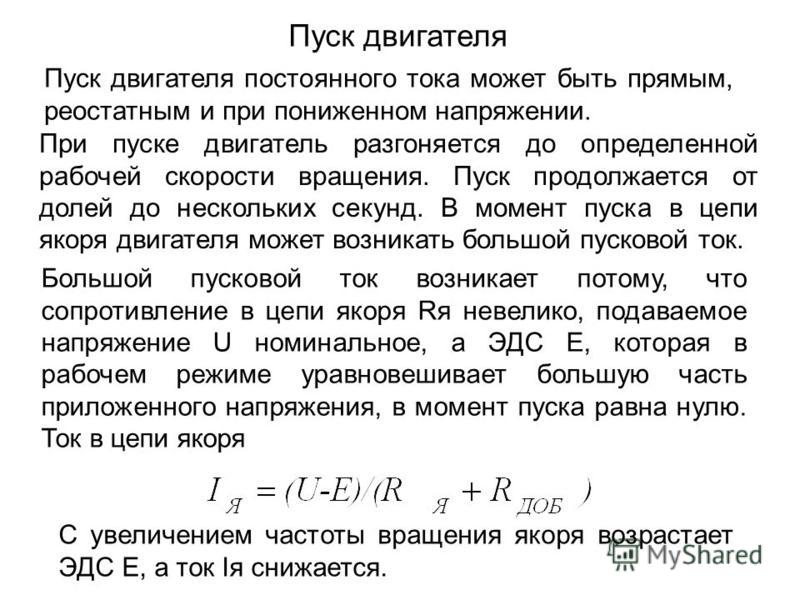 Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе. Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
Регулирование скорости вращения коллекторного двигателя постоянного тока
Для подачи питания на обмотки ротора коллекторного двигателя постоянного тока используется встроенный коммутатор, получивший наименование коллектор. Конструктивный элемент состоит из медных пластин, изолированных друг от друга с помощью диэлектрика. По пластинам скользят графитовые щетки, попеременно подавая электрическое напряжение на разные обмотки ротора. В результате образуется переменное магнитное поле, взаимодействующее с постоянным полем статора. Так электрическая энергия преобразуется в механическую и вал двигателя начинает вращаться. На производстве и в быту применяется мотор-редуктор — система, состоящая из электродвигателя и редуктора. В качестве примера можно привести схему движения щеток лобового стекла автомобиля. Вращение ротора передается на цилиндрические колеса с косыми зубьями, которые приводят дворники в рабочее положение.
Регулирование оборотов двигателя постоянного тока методом ШИМ
Главные характеристики электродвигателя — мощность, скорость вращения и крутящий момент (иногда еще выделяют момент инерции ротора). От этих величин зависит, сможет ли электропривод справиться с возложенными на него задачами. В большинстве электрических сетей используется переменный ток, который перед подачей на щетки электромотора нужно сделать постоянным. Для этого используют выпрямители, в их схеме нередко предусмотрена возможность добавления дополнительных сегментов для регулировки напряжения. Основной недостаток выпрямителя заключается в том, что при его работе происходит существенная потеря мощности, а значит, снижается КПД и часть электроэнергии уходит в никуда.
Для того, чтобы управление двигателем постоянного тока было эффективным, применяют широтно-импульсную модуляцию, сокращенно ШИМ. Принцип действия ШИМ можно объяснить на простом примере: если взять электрический мотор малой мощности и запитать его от батарейки, вал двигателя будет вращаться с максимальной скоростью, но если попеременно замыкать и размыкать контакты, идущие к источнику питания, частота вращения ротора изменится, какое-то время он будет двигаться по инерции. На щетки коллектора подается полное напряжение, а ШИМ позволяет установить точное время подачи. Способ дает возможность управлять вращением вала с применением цифровых микроконтроллеров.
Изменение скорости вращения ротора
Регулятор оборотов коллекторного двигателя подает на щетки импульсы. Например, максимальное напряжение электромотора 12 Вольт, а нам нужно, чтобы он работал в половину своей силы. Как реализовать это на практике, используя широтно-импульсную модуляцию? Для этого нужно рассмотреть понятие импульса — всплеска напряжения. Если таких всплесков в течение 1 секунды случается 10, то говорят о том, что частота импульсов составляет 10 Герц. То есть, за секунду на щетки электродвигателя 10 раз подается полное напряжение. Для начала нужно определить период следования импульсов T по формуле:
T=1/F,
где F — это частота. В нашем случае частота равна 10 Гц, тогда:
T=1/10=0,1 с,
то есть, напряжение поднимается от 0 Вольт до 12 и снова опускается до 0 за 0,1 секунды.
Еще одной важной характеристикой импульса является скважность S — это отношение периода следования к продолжительности импульса, не имеющее единиц измерения. Параметр определяется по формуле:
S=T/t,
где t — длина импульса. В нашем случае длина импульса составит половину от периода следования импульса, ведь нам нужен мотор, работающий вполсилы. Тогда получим:
S=0,1/0,05=2.
Теперь вычислим, сколько процентов от максимального числа оборотов мы получим с нашими показателями, для этого найдем коэффициент заполнения D, выражаемый в процентах и вычисляемый по формуле:
D=1/S,
где S — полученная ранее скважность. Выполняем подсчет:
D=1/2=0,5.
Вычисляем проценты:
0,5*100=50%.
Если в течение секунды на обмотку электродвигателя мы 10 раз подадим напряжение, которое будет длиться 0,05 секунды, то получим скорость вращения, соответствующую 6 Вольтам напряжения. В нашем случае периоды подачи и отсутствия напряжения равны, но если нужно получить повышенное количество оборотов ротора, длину импульса t нужно увеличивать. Например, необходимо получить 75% от максимальной скорости вращения вала, тогда длина импульса t должна быть равна:
t=T-25%=0,1–25%=0,075 с,
то есть 75% времени периода следования импульсов нужно подавать ток.
Найдем скважность:
S=0,1/0,075=1,33.
Теперь вычислим коэффициент заполнения:
D=1/1,33=0,75*100=75%.
Это наглядный пример. В реальности после завершения подачи тока на щетки, вал электродвигателя продолжает двигаться по инерции, поэтому если угловая скорость ротора растет и не успевает уменьшиться в течение паузы, регулирование потеряет свою эффективность.
Способы торможения двигателя
Если используется мотор-редуктор, или электродвигатель с нагрузкой на вал, обеспечивающей быстрое торможение, то в принципиальной схеме ШИМ достаточно предусмотреть ключ и один диод. Во время работы ключ подает импульс на коллектор, отчего происходит разгон ротора, после прекращения подачи питания, вал затормаживается самостоятельно, благодаря статической нагрузке. При этом существует 2 основных режима работы:
- Режим непрерывного тока. Ток в якоре хотя и уменьшается во время паузы, но все же продолжает протекать в прежнем направлении.
- Режим прерывистого тока. Ток в якоре течет только во время действия импульса, на паузе напряжение равняется нулю.
На двигателях, которые работают без статической нагрузки, необходимо применять электрическое торможение. Для этого в принципиальную схему включают сопротивление. Во время паузы, ключ присоединяет якорь мотора к сопротивлению, для запуска процесса динамического торможения.
Виды преобразователей
Широтно-импульсные преобразователи, осуществляющие управление двигателем постоянного тока, состоят из силовой части, схемы управления и подразделяются на следующие виды:
- Тиристорные. Дополняются схемами с параллельной и последовательной искусственной коммутацией.
- С запираемыми тиристорами. Схема работы мало отличима от транзисторных.
- Транзисторные. Характеризуются низкой инерционностью и минимальным внутренним сопротивлением.
Широтно-импульсный регулятор оборотов коллекторного двигателя позволяет гибко настраивать скорость вращения ротора с минимальным показателем рассеивания мощности.
Так же по теме ШИМ регулирования предлагаем статью «Регулирование скорости вращения коллекторного двигателя постоянного тока»
Универсальный коллекторный двигатель
Универсальный двигатель
Дмитрий Левкин
Конструкция универсального коллекторного электродвигателя не имеет принципиальных отличий от конструкции коллекторного электродвигателя постоянного тока с обмотками возбуждения, за исключением того, что вся магнитная система (и статор, и ротор) выполняется шихтованной и обмотка возбуждения делается секционированной. Шихтованная конструкция и статора, и ротора обусловлена тем, что при работе на переменном токе их пронизывают переменные магнитные потоки, вызывая значительные магнитные потери.
Универсальный двигатель
Секционирование обмотки возбуждения вызвано необходимостью изменения числа витков обмотки возбуждения с целью сближения рабочих характеристик при работе электродвигателя от сетей постоянного и переменного тока [2].
Схема универсального коллекторного двигателя
Универсальный коллекторный электродвигатель может быть выполнен как с последовательным, так и с параллельным и независимым возбуждением.
В настоящее время универсальные коллекторные электродвигатели выполняют только с последовательным возбуждением.
Принцип работы универсального двигателя
Возможность работы универсального двигателя от сети переменного тока объясняется тем, что при изменении полярности подводимого напряжения изменяются направления токов в обмотке якоря и в обмотке возбуждения. При этом изменение полярности полюсов статора практически совпадает с изменением направления тока в обмотке якоря. В итоге направление электромагнитного вращающего момента не изменяется:
,
- где M — электромагнитный момент, Н∙м,
- – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- – ток в обмотке якоря, А,
- Ф — основной магнитный поток, Вб.
В качестве универсального используют двигатель последовательного возбуждения, у которого ток якоря является и током возбуждения, что обеспечивает почти одновременное изменение направления тока в обмотке якоря Iа и магнитного потока возбуждения Ф при переходе от положительного полупериода переменного напряжения сети к отрицательному.
Если двигатель подключить к сети синусоидального переменного тока, то ток якоря Ia и магнитный поток Ф будут изменяться по синусоидальному закону:
,
- где i — ток, А,
- – амплитуда тока, А,
- – частота, рад/c.
,
- где – наибольшее значение магнитного потока, Вб,
- – угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный магнитными потерями в двигателе, рад.
Отсюда получим формулу электромагнитного момента коллекторного двигателя последовательного возбуждения, включенного в сеть синусоидального переменного тока, Нм:
.
После преобразования:
.
Первая часть выражения представляет собой постоянную составляющую электромагнитного момента Mпост, а вторая часть — переменную составляющую этого момента Мпер, изменяющуюся во времени с частотой, равной удвоенной частоте напряжения питания.
Таким образом, результирующий электромагнитный момент при работе двигателя от сети переменного тока пульсирует. Пульсации электромагнитного момента практически не нарушают работу двигателя. Объясняется это тем, что при значительной частоте пульсаций электромагнитного момента () и большом моменте инерции якоря вращение последнего оказывается равномерным.
Особенности универсального двигателя
Коэффициент полезного действия универсального двигателя при его работе от сети переменного тока более низкий, чем при его работе от сети постоянного тока. Другой недостаток универсального двигателя — тяжелые условия коммутации, вызывающие интенсивное искрение на коллекторе при включении двигателя в сеть переменного тока. Этот недостаток объясняется наличием трансформаторной связи между обмотками возбуждения и якоря, что ведет к наведению в коммутируемых секциях трансформаторной ЭДС, ухудшающей процесс коммутации в двигателе.
Наличие щеточно-коллекторного узла является причиной ряда недостатков универсальных коллекторных двигателей, особенно при их работе на переменном токе (искрение на коллекторе, радиопомехи, повышенный шум, невысокая надежность). Однако эти двигатели по сравнению с асинхронными и синхронными при частоте питающего напряжения f = 50 Гц позволяют получать частоту вращения до 10 000 об/мин и более (наибольшая синхронная частота вращения при f = 50 Гц равна 3000 об/мин) [3].
Области использования
Благодаря тому, что универсальный двигатель может иметь высокую скорость вращения при работе от однофазной сети переменного тока без использования дополнительных преобразовательных устройств, он получил широкое применение в таких домашних приборах как пылесосы, блендеры, фены и др. Так же универсальный электродвигатель широко используется в таких инструментах, как дрели и шуруповерты.
Благодаря тому, что скорость вращения универсального двигателя легко регулируется изменением величины питающего напряжения ранее он широко использовался в стиральных машинах. Сейчас благодаря развитию преобразовательной техники более широкое использование получают бесщеточные электродвигатели (СДПМ, АДКР) скорость вращения которых регулируется изменением частоты напряжения питания.
Смотрите также
Коллекторный двигатель: виды, принцип работы, схемы
В бытовом электрооборудовании, где используются электродвигатели, как правило, устанавливаются электромашины с механической коммутацией. Такой тип двигателей называют коллекторными (далее КД). Предлагаем рассмотреть различные виды таких устройств, их принцип действия и конструктивные особенности. Мы также расскажем о достоинствах и недостатках каждого из них, приведем примеры сферы применения.
Что такое коллекторный двигатель?
Под таким определением подразумевается электромашина, преобразовывающая электроэнергию в механическую, и наоборот. Конструкция устройства предполагает наличие хотя бы одной обмотки подсоединенной к коллектору (см. рис. 1).
Рисунок 1. Коллектор на роторе электродвигателя (отмечен красным)В КД данный элемент конструкции используется для переключения обмоток и в качестве датчика, позволяющего определить положение якоря (ротора).
Виды КД
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.
Конструкция универсального коллекторного двигателяОбозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
У устройств данного типа, возбуждение может быть последовательным и параллельным, но поскольку последний вариант сейчас не производят, мы его не будем рассматривать. Что касается универсальных КД последовательного возбуждения, то типовая схема таких электромашин представлена ниже.
Схема универсального коллекторного двигателяУниверсальный КД может работать от переменного напряжения благодаря тому, что когда происходит смена полярности, ток в обмотках возбуждения и якоря также меняет направление. В результате этого вращательный момент не изменяет своего направления.
Особенности и область применения универсальных КД
Основные недостатки данного устройства проявляются при его подключении к источникам переменного напряжения, что отражается в следующем:
- снижение КПД;
- повышенное искрообразование в щеточно-коллекторном узле, и как следствие, его быстрый износ.
Ранее КД широко применялись, во многих бытовых электроприборах (инструмент, стиральные машины, пылесосы и т.д.). На текущий момент производители практически престали использовать данный тип двигателей отдав предпочтение безколлекторным электромашинам.
Теперь рассмотрим коллекторные электромашины, работающие от источников постоянного напряжения.
КД с индуктором на постоянных магнитах
Конструктивно такие электромашины отличаются от универсальных тем, что вместо катушек возбуждения используются постоянные магниты.
Конструкция коллекторного двигателя на постоянных магнитах и его схемаЭтот вид КД получил наибольшее распространение по сравнению с другими электромашинами данного типа. Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Основная сфера применения – маломощные приводы для различного оборудования, часто используется в детских игрушках.
КД на постоянных магнитах с игрушки времен СССРК числу преимуществ можно отнести следующие качества:
- высокий момент силы даже на низкой частоте оборотов;
- динамичность управления;
- низкая стоимость.
Основные недостатки:
- малая мощность;
- потеря магнитами своих свойств от перегрева или с течением времени.
Для устранения одного из основных недостатков данных устройств (старения магнитов) в системе возбуждения используются специальные обмотки, перейдем к рассмотрению таких КД.
Независимые и параллельные катушки возбуждения
Первые получили такое название вследствие того, что обмотки индуктора и якоря не подключаются друг к другу и запитываются отдельно (см. А на рис. 6).
Рисунок 6. Схемы КД с независимой (А) и параллельной (В) обмоткой возбужденияОсобенность такого подключения заключается в том, что питание U и UK должны отличаться, в противном случае н возникнет момент силы. Если невозможно организовать такие условия, то катушки якоря и индуктора подключается параллельно (см. В на рис. 6). Оба вида КД обладают одинаковыми характеристиками, мы сочли возможным объединить их в одном разделе.
Момент силы у таких электромашин высокий при низкой частоте вращения и уменьшается при ее увеличении. Характерно, что токи якоря и катушки независимы, а общий ток является суммой токов, проходящих через эти обмотки. В результат этого, при падении тока катушки возбуждения до 0, КД с большой вероятностью выйдет из строя.
Сфера применения таких устройств – силовые установки с мощностью от 3 кВт.
Положительные черты:
- отсутствие постоянных магнитов снимает проблему их выхода из строя с течением времени;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Минусы:
- стоимость выше, чем у устройств на постоянных магнитах;
- недопустимость падения тока ниже порогового значения на катушке возбуждения, поскольку это приведет к поломке.
Последовательная катушка возбуждения
Схема такого КД представлена на рисунке ниже.
Схема КД с последовательным возбуждениемПоскольку обмотки включены последовательно, то ток в них будет равным. В результате этого, когда ток в обмотке статора становится меньше, чем номинальный (это происходит при небольшой нагрузке), уменьшается мощность магнитного потока. Соответственно, когда нагрузка увеличивается, пропорционально увеличивается мощность потока, вплоть до полного насыщения магнитной системы, после чего эта зависимость нарушается. То есть, в дальнейшем рост тока в обмотке катушки якоря не приводит к увеличению магнитного потока.
Указанная выше особенность проявляется в том, что КД данного типа непозволительно запускать при нагрузке на четверть меньше номинальной. Это может привести к тому, что ротор электромашины резко увеличит частоту вращения, то есть, двигатель пойдет «в разнос». Соответственно, такая особенность вносит ограничения на сферу применения, например, в механизмах с ременной передачей. Это связано с тем, что при ее обрыве электромашина начинает работать в холостом режиме.
Указанная особенность не распространяется на устройства, чья мощность менее 200 Вт, для них допустимы падения нагрузки вплоть до холостого режима работы.
Преимущества КД с последовательной катушкой, такие же, как у предыдущей модели, за исключением простоты и динамичности управления. Что касается минусов, то к ним следует отнести:
- высокую стоимость в сравнении с аналогами на постоянных магнитах;
- низкий уровень момента силы при высокой частоте оборотов;
- поскольку обмотки статора и возбуждения подключены последовательно, возникают проблемы с управлением скоростью вращения;
- работа без нагрузки приводит к поломке КД.
Смешанные катушки возбуждения
Как видно из схемы, представленной на рисунке ниже, индуктор на КД данного типа обладает двумя катушками, подключенных последовательно и параллельно обмотке ротора.
Схема КД со смешанными катушками возбужденияКак правило, одна из катушек обладает большей намагничивающей силой, поэтому она считается, как основная, соответственно, вторая – дополнительная (вспомогательная). Допускается встречное и согласованное включение катушек, в зависимости от этого интенсивность магнитного потока соответствует разности или сумме магнитных сил каждой обмотки.
При встречном включении характеристики КД становятся близкими к соответствующим показателям электромашин с последовательным или параллельным возбуждением (в зависимости от того, какая из катушек является основной). То есть, такое включение актуально, если необходимо получить результат в виде неизменной частоты оборотов или их увеличению при возрастании нагрузки.
Согласованное включение приводит к тому, что характеристики КД будут соответствовать среднему значению показателями электромашин с параллельными и последовательными катушками возбуждения.
Единственный недостаток такой конструкции – самая высокая стоимость в сравнении с другими типами КД. Цена оправдывается благодаря следующими положительными качествами:
- не устаревают магниты, за отсутствием таковых;
- малая вероятность выхода из строя при нештатных режимах работы;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Коллекторный электродвигатель: достоинства, недостатки, область применения
Мы часто встречаемся с электродвигателями. Они обеспечивают работу бытовой и строительной техники, являются составной частью производственного оборудования. Немалая часть устройств имеет в составе коллекторный двигатель. Это один из простых и недорогих движков, который имеет хорошие характеристики. Именно этим, да ещё невысокой ценой, обусловлена его популярность.
Что такое коллекторный двигатель и его особенности
Коллектором называют часть двигателя, контактирующую со щётками. Этот узел обеспечивает передачу электроэнергии в рабочую часть агрегата. Коллекторным называется двигатель, у которого хотя бы одна обмотка ротора соединена со щётками и коллектором. Коллекторные электродвигатели бывают:
- постоянного тока;
- переменного тока;
- универсальные.
Коллекторный двигатель может быть постоянного и переменного тока. Есть универсальные модели, которые могут работать от источника напряжения любого типа
Последние универсальные, работают как от постоянного, так и от переменного тока. Они сохраняют популярность, даже несмотря на то, что наличие щёток отрицательный момент, так как щётки стираются и искрят. За этим узлом требуется постоянное наблюдение, техническое обслуживание. К плюсам коллекторных двигателей относят возможность плавной регулировки скорости в широких пределах, невысокую стоимость.
Как и другие электромоторы, коллекторный состоит из статора и ротора (часто называют «якорь»). Его отличительной чертой является наличие на валу коллекторного узла, через который на машину передаётся электропитание. Устройство коллекторных моторов постоянного и переменного тока похожи, но имеют определённые отличия, потому рассмотрим подробнее их по отдельности.
Общее устройство коллекторных двигателей
Как и любой электродвигатель, коллекторный преобразует электрическую энергию в механическую. Он состоит из неподвижной части – статора и подвижной – ротора. В статоре располагаются обмотки возбуждения, ротор отвечает за передачу возникающей механической энергии. Одна из составляющих частей ротора – вал. С одной стороны, на валу размещён коллекторный узел, с помощью которого на обмотки ротора передаётся электрическая энергия.
Коллекторный двигатель: устройство
Статор состоит из корпуса, который защищает компоненты мотора от повреждений. Сверху и снизу корпуса крепятся магнитные полюса. Они необходимы для поддержания магнитного потока между статором и ротором.
Ротор коллекторного двигателя
Ротор коллекторного двигателя состоит из вала, на который насаживается сборный магнитопровод. С одной стороны, на вал крепится коллекторный узел, с другой, лопасти вентилятора. Для обеспечения лёгкого вращения и для фиксации в корпусе на вал с двух сторон надеваются подшипники. Для нормальной работы электродвигателя, необходимо чтобы ротор был отлично сбалансирован. Потому к изготовлению этой части подходят особенно скрупулёзно.
Подвижная (вращающаяся) часть
Роторная обмотка
Сердечник ротора собирается из металлических пластин, отштампованных из магнитного металла. Толщина пластин 0,35-0,5 мм, каждая из них залита слоем диэлектрического лака, для избавления от паразитных токов. Пластины по внешнему краю имеют пазы, в которые затем укладываются витки медной проволоки. Эти пластины насаживаются на вал и закрепляются на нём, собирается пакет требуемого размера. Эта система является магнитопроводом.
Так выглядит ротор коллекторного двигателя
В пазы магнитопровода укладывается витки медного обмоточного провода. Выходы обмоток выводятся на коллекторный узел, где и происходит их переключение.
Как устроен коллекторный узел и как он работает
Коллекторный узел стоит рассмотреть подробнее. Иначе понять, как вращается ротор, сложно. Коллектор имеет цилиндрическую форму и набран из медных пластин (иногда называют ламелями), которые изолированы друг от друга слюдяными или текстолитовыми прокладками. Нет электрического контакта и с осью вала, к которому он крепится.
Коллектор имеет вид цилиндра, который набран из медных пластин. Пластины сделаны в виде секторов, разделены диэлектрическими прокладками
Получается, коллектор собран из медных секторов и без обмотки электрически друг с другом не связанных. К каждой пластине коллектора крепится вывод одной рамки обмотки ротора. К плоскости двух противоположных рамок коллектора прижимается две щетки. Они плотно прилегают к поверхности медной пластины коллектора, что даёт хороший контакт. На эти щётки подаётся потенциал, который и передаётся в тот виток обмотки ротора, который подключён к этим пластинам.
К парным пластинам коллектора прижимаются графитовые щетки
Так как ротор с некоторой скоростью вращается, одна пара пластин сменяется другой. Таким образом, напряжение передаётся на все обмотки ротора. При этом возникающие друг за другом поля поддерживают вращение ротора, «проталкивая» его в нужном направлении.
Принцип работы
Вот теперь, после того как рассмотрели устройство ротора, можно поговорить о том, как работает коллекторный двигатель. Собственно, принцип действия не отличается от других моторов, ротор начинает вращаться в магнитном поле благодаря наведенным на нём токам. Но как именно и почему эти тока наводятся? Для понимания надо вспомнить, как возникает электродвижущая сила в постоянном магнитном поле. Если в поле постоянного магнита ввести прямоугольную рамку, под действием возникающего в ней тока она начинает вращение. Направление вращения определяется по правилу буравчика. Для постоянного поля оно гласит так, если ввести правую руку в поле так, чтобы магнитные линии входили в ладонь, вытянутые пальцы укажут направление движения.
Иллюстрация к пояснению принципа работы коллекторного двигателя постоянного тока
Если посмотреть на устройство ротора, то видим, что каждая обмотка представляет собой такую рамку. Только состоит она не из одного провода, а из нескольких, но сути это не меняет. При помощи коллекторного узла, в какой-то момент времени, обмотка подключается к питанию, по ней протекает ток и вокруг проводника возникает магнитное поле. Оно взаимодействует с полем статора. В зависимости от типа, стоят там постоянные магниты или тоже протекает постоянный ток в обмотках, генерируя на полюсах собственное магнитное поле. Поля ротора и статора рассчитаны так, что при взаимодействии они «проталкивают» ротор в нужном направлении. Вот, коротко и без особых подробностей описание работы коллекторного двигателя постоянного тока.
Обмотки на роторе подключаются к пластинам коллектора. Когда с пластинами контактируют щетки, получаем замкнутый контур, по которому течет ток
Если немного вдуматься, можно понять, почему коллекторный двигатель позволяет легко и плавно регулировать скорость. Чем больше напряжение подается на обмотки ротора, тем более мощное поле генерирует статор, тем сильнее их взаимодействие и быстрее крутится ротор, так как его толкают с большей силой. Если напряжение уменьшить, взаимодействие меньше, результирующая скорость вращения тоже. Так что все что нужно регулировать напряжение, а это может даже простой потенциометр (переменное сопротивление).
Достоинства и недостатки
Как водится, начнём с перечисления плюсов. Достоинства коллекторных электромоторов такие:
- Простое устройство.
- Высокая скорость до 10 000 об/мин.
- Хороший крутящий момент даже на малых оборотах.
- Невысокая стоимость.
- Возможность регулировать скорость в широких пределах.
- Невысокие пусковые токи и нагрузки.
Схема коллекторного двигателя
Неплохие качества, но есть и недостатки, причём они не менее серьёзные. Минусы коллекторных электродвигателей такие:
- Высокий уровень шумов при работе. Особенно на высоких скоростях. Щетки трутся о коллектор, дополнительно создавая шумы.
- Искрение щёток, их износ.
- Необходимость частого обслуживания коллекторного узла.
- Нестабильность показателей при изменении нагрузки.
- Высокая частота отказов из-за наличия коллектора и щёток, малый срок службы этого узла.
В целом, коллекторный двигатель неплохой выбор, иначе его не ставили бы на бытовой технике. Справедливости ради стоит сказать, что при нормальном качестве исполнения, работают такие двигатели годами. Могут и 10-15 лет проработать без проблем.
Коллекторный двигатель постоянного тока с магнитами
В коллекторных двигателях постоянного тока постоянное магнитное поле обеспечивают:
- постоянные магниты;
- обмотки возбуждения.
Магниты и обмотки располагаются на корпусе статора, и чаще всего, вверху и внизу. Если говорить о маломощных моторах, то более популярны коллекторные двигатели с постоянными магнитами. Они проще в производстве, дешевле, быстро реагируют на изменение напряжения, что позволяет плавно регулировать скорость. Недостаток моторов с постоянными магнитами является их невысокая мощность, а еще то, что со временем или при перегреве магниты теряют свои свойства и это приводит к ухудшению характеристик двигателя.
Устройство коллекторного двигателя постоянного тока
Такие моторы имеют небольшую мощность, от единиц до сотен Ватт. Они используются в технике, для которой важна плавная регулировка скоростей. Это обычно детские игрушки, некоторые виды бытовой техники (в основном вентиляторы). Недостатком коллекторного мотора с магнитами является постепенная потеря мощности, магниты со временем становятся слабее, и без того небольшая мощность падает. Но в последнее время появились новые магнитные сплавы с большой магнитной силой, позволяющие создавать двигатели с большой мощностью.
С обмотками возбуждения
Коллекторные двигатели постоянного тока с обмотками возбуждения нашли более широкое применение. От двигателей этого типа работает аккумуляторный электроинструмент: болгарки, дрели, шуруповерты т.д. Обмотки возбуждения делают из изолированного медного провода (в лаковой оболочке). В качестве основы используются канавки в полюсных наконечниках. На них как на основу наматываются обмотки.
Коллекторный двигатель с системой обмоточного возбуждения
Если посмотреть на устройство коллекторного двигателя, мы видим два несвязанных между собой устройства, ротор и обмотки возбуждения. От способа их подключения зависят характеристики и свойства двигателя. Различают четыре способа соединения ротора и обмоток возбуждения. Эти способы называют способами возбуждения. Вот они:
- Независимое. Возможно только если напряжения на обмотке возбуждения и на якоре неравны (бывает очень редко). Если они равны, используется схема параллельного возбуждения.
- Параллельное. Хорошо регулируется скорость, стабильная работа на низких оборотах, постоянные характеристики, независимы от времени. К недостаткам подключения этого типа относится нестабильность двигателя при падении тока индуктора ниже нуля.
- Последовательное. При таком подключении нельзя включать двигатель с нагрузкой на валу ниже 25% от номинальной. При отсутствии нагрузки скорость вращения сильно возрастает, что может разрушить двигатель. Потому с ременной передачей такой тип подключения не используют, при обрыве ремня мотор разрушается. Схема последовательного возбуждения имеет высокий момент на низких оборотах, но не слишком хорошо работает на высоких, управлять скоростью сложно.
- Смешанное. Считается одним из лучших. Хорошо управляется, имеет высокий крутящий момент на низких оборотах, редко выходит из-под контроля. Из недостатков самая высокая цена по сравнению с другими типами.
Способы подключения обмоток возбуждения
Коллекторные двигатели постоянного тока могут иметь КПД от 8-10% до 85-88%. Зависит от типа подключения. Но высокопродуктивные отличаются высокими оборотами (тысячи оборотов в минуту, реже сотни) и низким моментом, так что они идеальны для вентиляторов. Для любой другой техники используют низкооборотистые модели с малым КПД, либо к продуктивным моделям добавляют редуктор, другого решения пока не нашли.
Универсальные коллекторные двигатели
Несмотря на то, что коллекторный узел можно назвать самым слабым местом электродвигателя, подобные модели нашли широкое применение. Все благодаря невысокой цене и легкости управления скоростью. Коллекторные двигатели переменного тока стоят практически в любой бытовой технике, как крупной, так и мелкой. Миксеры, блендеры, кофемолки, строительные фены, даже стиральные машины (привод барабана).
Универсальный коллекторный двигатель работает от постоянного и переменного напряжения
По строению универсальные коллекторные двигатели не отличаются от моделей постоянного тока с обмотками возбуждения. Разница, безусловно есть, но она не в устройстве, а в деталях:
- Схема возбуждения всегда последовательная.
- Магнитные системы ротора и статора для компенсации магнитных потерь делают шихтованного типа (единая система без сплошных разрезов).
- Обмотка возбуждения состоит из нескольких секций. Это необходимо, чтобы режимы работы на постоянном и переменном напряжении были схожи.
Работа коллекторных электродвигателей универсального типа основана на том, что если одновременно (или почти одновременно) поменять полярность питания на обмотках статора и ротора, направление результирующего момента останется тем же. При последовательной схеме возбуждения полярность меняется с очень небольшой задержкой. Так что направление вращения ротора остается тем же.
Достоинства и недостатки
Хотя универсальные коллекторные двигатели активно используются, они имеют серьёзные недостатки:
- Более низкий КПД при работе на переменном токе (если сравнивать с работой на постоянном такого же напряжения).
- Сильное искрение коллекторного узла на переменном токе.
- Создают радиопомехи.
- Повышенный уровень шума при работе.
Во многих моделях строительной техники
Но все эти недостатки нивелируются тем, что при частоте питающего напряжения в 50 Гц они могут вращаться со скоростью 9000-10000 об/мин. По сравнению с синхронными и асинхронными двигателями это очень много, максимальная их скорость — 3000 об/мин. Именно это обусловило использование этого типа моторов в бытовой технике. Но постепенно они заменяются современными бесщеточными двигателями. С развитием полупроводников их производство и управление становится всё более дешёвым и простым.
Универсальный коллекторный двигатель — это… Что такое Универсальный коллекторный двигатель?
Схема одного из вариантов УКД. Допускается работа и от постоянного, и от переменного токаУниверсальный коллекторный двигатель (УКД) — разновидность коллекторной машины постоянного тока, которая может работать и на постоянном, и на переменном токе. Получил большое распространение в ручном электроинструменте и в некоторых видах бытовой техники из-за малых размеров, малого веса, лёгкости регулирования оборотов, относительно низкой цены.
Особенности конструкции
Строго говоря, универсальный коллекторный двигатель является коллекторным электродвигателем постоянного тока с последовательно включенными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону.
Для возможности работы на переменном токе применяется статор из магнитно-мягкого материала, имеющего малый гистерезис (сопротивление перемагничиванию). Для уменьшения потерь на вихревые токи статор выполняют наборным из изолированных пластин.
Особенностью (в большинстве случаев — достоинством) работы такого двигателя именно на переменном токе (а не на постоянном такого же напряжения) является то, что в режиме малых оборотов (пуск и перегрузка) индуктивное сопротивление обмоток статора ограничивает потребляемый ток и соответственно максимальный момент двигателя (оценочно) до 3—5 от номинального (против 5—10 при питании того же двигателя постоянным током). Для сближения механических характеристик у двигателей общего назначения может применяться секционирование обмоток статора — отдельные выводы (и меньшее число витков обмотки статора) для подключения переменного тока.
Реверсирование УКД осуществляется переключением полярности включения обмоток только статора или только ротора.
Достоинства и недостатки
Сравнение приведено для случая подключения к бытовой однофазной электрической сети 220 вольт и одинаковой мощности двигателей. Разница в механических характеристиках двигателей («мягкость-жёсткость», максимальный момент) может быть как достоинством, так и недостатком в зависимости от требований к приводу.
Достоинства в сравнении с коллекторным двигателем постоянного тока:
- Прямое включение в сеть, без дополнительных компонентов (для двигателя постоянного тока требуется, как минимум, выпрямление).
- Меньший пусковой (перегрузочный) ток (и момент), что предпочтительнее для бытовых устройств.
- Проще управляющая схема (при её наличии) — тиристор (или симистор) и реостат. При выходе из строя электронного компонента двигатель (устройство) остаётся работоспособным, но включается сразу на полную мощность.
Недостатки в сравнении с коллекторным двигателем постоянного тока:
- Меньший общий КПД из-за потерь на индуктивность и перемагничивание статора.
- Меньший максимальный момент (может быть недостатком).
Достоинства в сравнении асинхронным двигателем:
- Быстроходность и отсутствие привязки к частоте сети.
- Компактность (даже с учётом редуктора).
- Больший пусковой момент.
- Автоматическое пропорциональное снижение оборотов (практически до нуля) и увеличение момента при увеличении нагрузки (при неизменном напряжении питания) — «мягкая» характеристика.
- Возможность плавного регулирования оборотов (момента) в очень широком диапазоне — от ноля до номинального значения — изменением питающего напряжения.
Недостатки в сравнении с асинхронным двигателем:
- Нестабильность оборотов при изменении нагрузки (где это имеет значение).
- Наличие щёточно-коллекторного узла и в связи с этим:
- Относительно малая надёжность (срок службы)
- Сильное искрение на коллекторе из-за коммутации переменного тока и связанные с этим радиопомехи
- Высокий уровень шума
- Относительно большое число деталей коллектора (и соответственно двигателя)
Следует отметить, что в современных бытовых устройствах ресурс электродвигателя (щёточно-коллекторного узла) сопоставим с ресурсом рабочих органов и механических передач.
Сравнение с асинхронным двигателем
Двигатели (УКД и асинхронный) одной и той же мощности, независимо от номинальной частоты асинхронного двигателя, имеют разную механическую характеристику:
- УКД — «мягкая» характеристика, момент прямо, а обороты обратно пропорциональны нагрузке на валу (потребляемой мощности) — практически линейно — от режима холостого хода до режима полного торможения. Номинальный момент выбирается примерно в 3-5 раз меньшим максимального. Обороты холостого хода ограничиваются только потерями в двигателе и могут разрушить мощный двигатель при включении его без нагрузки.
- Асинхронный двигатель — «жёсткая» характеристика — двигатель поддерживает близкую к номинальной частоту вращения, резко (десятки процентов) увеличивая момент при незначительном снижении оборотов (единицы процентов). При значительном снижении оборотов (до полного торможения) момент двигателя не растёт, а даже падает, что вызывает полную остановку. Обороты холостого хода постоянны и слегка превышают номинальные.
Механическая характеристика в первую очередь и обуславливает (разные) области применения данных типов двигателей.
Из-за малых оборотов, ограниченных частотой сети переменного тока, асинхронные двигатели той же мощности имеют значительно бо́льшие вес и размеры, чем УКД. Если асинхронный двигатель запитывается от преобразователя (инвертора) с высокой частотой, то вес и размеры обеих машин становятся соизмеримы. При этом остаётся жёсткость механической характеристики, добавляются потери на преобразование тока и, как следствие увеличения частоты, повышаются индуктивные и магнитные потери (снижается общий КПД).
Аналоги без коллекторного узла
Ближайшим аналогом УКД по механической харатеристике является бесколлекторный электродвигатель (вентильный электродвигатель, в котором электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР).
Электронным аналогом универсального коллекторного двигателя является система: выпрямитель (мост), синхронный электродвигатель с датчиком углового положения ротора (датчик угла) и инвертором (другими словами — вентильный электродвигатель с выпрямителем).
Однако из-за применения постоянных магнитов в роторе максимальный момент вентильного двигателя при тех же габаритах будет меньше.
Применение
Ручной электроинструмент:
Бытовая техника:
См. также
- Вентильный электродвигатель
- Электродвигатель
Ссылки
Коллекторный двигатель: Устройство, виды и принцип работы
Большое количество оборудования имеет силовые установки, работающие от электрической сети питания. Коллекторный двигатель это силовая установка, преобразующая электрическую энергию в физическую силу. Отличие коллекторного двигателя от бесколлекторного состоит в наличии коллекторно-щеточного узла.
Виды коллекторных двигателей
В зависимости от источника тока, к которому подключается мотор, коллекторные установки делят на два вида:
- Работающий от источника постоянного тока. Используются в автомобилях, самоходной технике, детских игрушках и т.д. Отличаются простотой конструкции. Подключаются только к источнику постоянного тока;
- Универсальный коллекторный двигатель. Работает как от постоянного, так и от переменного тока. Применяется в бытовых электрических приборах.
СПРАВКА: Универсальный коллекторный силовой агрегат отличается простотой конструкции и небольшими габаритно массовыми параметрами. Благодаря этому может быть использован в качестве силовой установки ручного инструмента.
В зависимости от максимальной мощности силовые установки делятся на три типа:
- Небольшой мощности. Используются в детских игрушках, аудио – видеотехнике и т.д. Напряжение питания таких установок составляет от 1.5 до 9 Вольт. Оси якоря устанавливаются на специализированные втулки. Они играют роль подшипников скольжения. Токопроводящие щетки выполнены в виде двух пластин;
- Средней мощности. Якорь устанавливается на втулках или подшипниках. Применяются на автомобильной и самоходной технике. Напряжение питания составляет от 12 до 24 вольта;
- Высокой мощности. Отличаются высокими показателями мощности и наличием электрических магнитов.
Устройство коллекторного двигателя
Для того чтобы понять как работает коллекторный двигатель, необходимо разобраться в его конструкции. Независимо от вида силового агрегата он состоит из следующих основных элементов:
- Якорь. Состоит из металлического вала, на который установлены обмотки. Вал устанавливается на подшипниках скольжения или качения в корпусе мотора. Якорь является движущейся частью мотора, которая передаёт крутящий момент к необходимому оборудованию;
- Коммутатор (коллектор). Необходим для определения положения якоря. Располагается на роторе. Выполнен в виде медных контактов трапециевидного сечения;
- Щётки. Изготовлены из графита. Щетки используются для подачи напряжения к обмоткам ротора;
- Держатели щёток. Изготавливаются из металла или пластика. Держатели щёток устанавливаются на корпус мотора при помощи не проводящих ток прокладок. Такая конструкция исключает подачу напряжения на корпус мотора;
ВАЖНО: Щётки или держатели оснащаются пружинами. Они необходимы для прижимания щетки к коллектору во время работы силовой установки.
- Подшипники. На небольших моторах используются пластиковые или металлические втулки. Мотор оборудован двумя подшипниками. Они необходимы для нормального вращения вала якоря;
- Сердечник статора. Изготавливается из большого количества металлических пластин;
- Обмотки. Необходимы для создания магнитного поля.
Принцип работы коллекторного двигателя
Коллекторный двигатель переменного тока 220 Вольт и мотор постоянного тока, преобразуют электрическую энергию в физическую силу. Создание физической силы осуществляется путём раскручивания якоря, установленного на двух подшипниках в корпусе мотора.
Ротор и статор силового агрегата имеют обмотки. Они изготовлены из провода. Во избежание замыкание витков обмотки между собой провод выполнен в изолирующей оболочке. Напряжение подается на обмотку статора при помощи провода.
Якорь коллекторного мотора подвижный. Для передачи напряжения на обмотку якоря используется коллектор.
Он выполнен в виде медных контактов. На них передаётся напряжение через графитовые щетки. Такая конструкция позволяет передавать напряжение на обмотку якоря независимо от скорости его вращения.
При прохождении электрического тока через обмотки возникает магнитное поле. Обмотка якоря имеет магнитное поле противоположной полярности полю обмотки статора. Под воздействием электромагнитных полей разной полярности якорь двигателя начинает вращаться.
ВНИМАНИЕ: Коллекторный двигатель может быть использован в качестве генератора постоянного тока.
Варианты обмоток возбуждения
Подключить коллекторный двигатель постоянного тока можно несколькими способами. Возбуждение мотора зависит от способа подключения обмоток.
- Независимое подключение. Обмотки мотора постоянного тока подключаются отдельно. Для подключения используется два источника постоянного тока. Обмотка статора оснащается реостатом. Он необходим для установки необходимой частоты вращения ротора. Обмотка ротора оборудуется пусковым реостатом. Он нужен для контроля над силой тока в обмотке ротора при запуске силовой установки;
- Параллельное подключение. Питание обмоток якоря и статора осуществляется от одного и того же источника питания. Обмотки оснащены регуляторами;
- Последовательно-соединенное. Электродвигатель такой конструкции имеет обмотку статора, последовательно подключенную с обмоткой якоря. Ротор может быть оснащен регулятором, необходимым для ограничения силы тока при запуске. Статор оснащается реостатом, регулирующим в частоту вращения вала.
ВАЖНО: Использование коллекторного мотора с последовательным подключением без нагрузки, может привести к выходу его из строя.
- Смешанное возбуждение. Данная конструкция использует две катушки подключенные параллельно, и последовательно одновременно.
Преимущества и недостатки коллекторного двигателя
Однофазный коллекторный двигатель переменного тока или аналогичный работающий от источника постоянного тока имеют плюсы и минусы.
Плюсы
- Однофазный мотор коллекторного типа ( универсальный), можно подключить к любой сети питания. Такая конструкция позволяет использовать мотор от источника питания переменного тока, без использования выпрямителей;
- В отличие от бесколлекторных двигателей, модели с коллекторами имеют небольшие размеры. Это позволяет использовать силовые установки для монтажа на электрический инструмент, детские игрушки, и т.п;
- Небольшая сила тока при запуске. Позволяет использовать моторы от бытовой сети питания;
- Простота регулировки вращения вала ротора. Для управления оборотами применяется реостат. При выходе из строя регулятора, мотор останется работоспособным;
Недостатки
- Необходимость регулярного обслуживания. Графитовые щетки при длительной работе стираются. Необходимо вовремя менять щетки на новые. Нарушение этого правила может привести к выходу из строя коллектора;
- Отсутствие стабильности показателей мощности. При изменении нагрузки на якорь показатели мощности силового агрегата могут изменяться.
Возможные поломки и способы их ремонта
В результате работы коллекторного двигателя могут возникнуть неисправности. Большинство из них самостоятельно сможет устранить человек не имеющий специализированных технических знаний и оборудования. Ниже представлены наиболее часто возникающие неисправности.
Повышенный шум при работе узла. Сильный уровень шума при работе мотора может свидетельствовать о выходе из строя подшипников, на которые установлен якорь.
При выходе из строя подшипников качения необходимо заменить изношенные детали новыми.
Износ щёток. Критическая изношенность щёток сопровождается повышенным уровнем шума при работе. Несвоевременная замена может привести к поломке коллектора. При возникновении неисправности необходимо заменить графитовые щётки. При выборе щёток необходимо обратить внимание на их толщину. Новые детали не должны застревать в держателях.
Читайте также: Двигатель 1ZZ: Характеристики двигателяОтсутствие вращения якоря при подключении мотора к сети питания. Отсутствие вращения может возникнуть в результате обрыва цепи питания. Обрыв может произойти в результате поломки пружины прижимающей щётку к коллектору или при обрыве провода. При поломке пружины необходимо заменить ее новой деталью. При обрыве провода необходимо восстановить его целостность.
Отсутствие вращения ротора может возникнуть в результате выхода из строя предохранителя. Для восстановления работоспособности необходимо установить новый предохранитель. Перед установкой предохранителя необходимо определить причину, по которой старое устройство вышло из строя. После устранения причины можно установить предохранитель и провести испытание двигателя.
Отсутствие регулировки вращения вала якоря. После запуска агрегат работает на максимальных оборотах. Такая неисправность возникает в результате поломки реостата. Для восстановления работоспособности двигателя необходимо заменить регулятор.
Медленное вращение ротора. Снижение частоты вращения вала может возникнуть в результате низкого напряжения в сети питания. Необходимо проверить напряжение. Снижение оборотов якоря может быть спровоцировано высокой нагрузкой. Необходимо снизить нагрузку на якорь.
Из вышеперечисленного следует, что коллекторный мотор преобразовывает электрическую энергию в физическую силу. Для передачи напряжения к обмоткам якоря используются щётки. Моторы отличаются простотой конструкции и небольшими габаритно массовыми параметрами.
Частота — вращение — магнитное поле — статор
Частота — вращение — магнитное поле — статор
Cтраница 2
Частота вращения ротора при холостом ходе двигателя мало отличается от частоты вращения магнитного поля статора и скольжение при этом режиме составляет доли процента. [17]
При стандартной частоте переменного тока ( / 50 Гц) частота вращения магнитного поля статора двухполюсной асинхронной машины п 50 60 3000 об / мин. На практике в большинстве случаев требуются двигатели с меньшей частотой вращения. Это достигается применением многополюсных обмоток статора. [18]
При стандартной частоте переменного тока ( / 50 Гц) частота вращения магнитного поля статора двухполюсной асинхронной машины и 50 60 3000 об / мин. На практике в большинстве случаев требуются двигатели с меньшей частотой вращения. Это достигается применением многополюсных обмоток статора. [19]
Электрическую машину переменного тока, у которой частота вращения ротора меньше частоты вращения магнитного поля статора и зависит от нагрузки, называют асинхронной. Асинхронные двигатели бывают коллекторные и бесколлекторные. Преимущественное распространение получили бесколлекторные асинхронные элект рические машины, применяемые там, где не требуется постоянная частота вращения. Асинхронные бесколлекторные электродвигатели бывают двух исполнений — с короткозамкнутым и фазным роторами. [20]
В процессе установившейся работы частота вращения синхронного электродвигателя постоянна, равна частоте вращения магнитного поля статора и не зависит от момента статических сопротивлений на валу двигателя. Поэтому графически механическая характеристика синхронного электродвигателя изображается прямой линией, параллельной оси моментов в пределах от холостого хода до выпадения из синхронизма. [21]
Асинхронный электродвигатель — двигатель, в котором частота вращения ротора не равна частоте вращения магнитного поля статора, т.е. асинхронна. [22]
У асинхронных электродвигателей частота вращения якоря на 2 — 7 % отстает от частоты вращения магнитного поля статора. Действительная частота вращения асинхронного электродвигателя будет определяться следующими величинами: 2940 — 2820, 1470 — 1410, 980 — 930, 735 — 710, 580 — 565 об / мин. Следует отметить, что частота вращения асинхронного электродвигателя практически не зависит от степени нагрузки электродвигателя и возрастает при холостом ходе машины не более чем на 2 — 3 %, поэтому при установке колес на валу электродвигателя или соединении валов муфтой частота вращения будет ограничена приведенными выше значениями. [23]
Асинхронной называют электрическую машину переменного тока, у которой частота вращения ротора меньше частоты вращения магнитного поля статора и зависит от нагрузки. Асинхронные двигатели делятся на коллекторные и бесколлекторные. Преимущественное распространение получили бесколлекторные асинхронные электрические машины, применяемые там, где не требуется постоянная частота вращения. Асинхронные бесколлекторные электродвигатели бывают двух исполнений по ротору: с короткозамкнутым и фазным. [24]
Асинхронной называют электрическую машину переменного тока, у которой частота вращения ротора меньше частоты вращения магнитного поля статора и зависит от нагрузки. Асинхронные двигатели делятся на коллекторные и бесколлекторные. Преимущественное распространение получили бесколлекторные асинхронные электрические машины, применяемые там, где не требуется постоянная частота вращения. Эти машины бывают двух исполнений по ротору: с короткозамкнутым и фазным. [25]
Для пуска синхронного двигателя необходимо его ротор вращать с частотой, близкой к частоте вращения магнитного поля статора, что осуществляют с помощью вспомогательного двигателя или путем асинхронного пуска. Ротор снабжают дополнительной короткозамкну-той пусковой обмоткой. [26]
При соединении обмотки статора в треугольник изменятся только значения фазных и линейных токов, частота вращения магнитного поля статора останется неизменной. [28]
Найти число пар полюсов асинхронного двигателя, питающегося от сети переменного тока с частотой 50 Гц, при частоте вращения магнитного поля статора п 1000 об / мин. [29]
Найти число пар полюсов асинхронного двигателя, питающегося от сети переменного тока с частотой 50 Гц, при частоте вращения магнитного поля статора и 1000 об / мин. [30]
Страницы: 1 2 3
Устройство и принцип работы электроинструмента
Содержание:
- 1. Коллекторный электродвигатель постоянного тока
- 1.1. Принцип действия
- 1.2. Недостатки
- 2. Бесколлекторный двигатель
- 3. Редуктор
- 3.1. Особенности редукторов
- 4. Устройства управления
- 5. Для безопасной работы
Двигатель, редуктор, устройства управления и детали для безопасной работы — вот основные узлы каждого электроинструмента. Для ручной машины важно, что бы она была как можно легче и меньше. Кроме того, от нее требуется высокая скорость, которую можно регулировать. Этим условиям отвечают двигатели постоянного тока. Они подразделяются на коллекторные и вентильные.
Коллекторный электродвигатель постоянного тока
Что бы понять, как электрическая энергия превращается в механическую, познакомимся с устройством двигателя. Его основные узлы: статор (индуктор), ротор (якорь) и примыкающий к нему щеточноколлекторный узел.
Статор — неподвижная стальная деталь, к которой прикрепляются главные и добавочные полюсы. Обмотка главных полюсов создает магнитное поле, а добавочная улучшает работу коллектора.
Вращающийся ротор устанавливается на валу. Он состоит из сердечника и обмотки. Ее концы соединяются с пластинами коллектора, к которому, в свою очередь, примыкают щетки — через них обмотка якоря соединяется с внешней цепью. Щетки занимают определенное положение по отношению к полюсам двигателя. В некоторых электроинструментах имеется поворотный щеткодержатель-траверса, благодаря ему положение щеток можно изменять. Это позволяет сохранить мощность при работе в режиме реверса. В остальных случаях вращение в обратном режиме включают электронные магнитные пускатели.
Принцип действия
Двигатель работает за счет электромагнитной индукции. При подаче напряжения на графитовые щетки, они замыкаются с ротором. По его обмотке проходит электрический ток. Так как ротор находится внутри магнитного поля статора, на него начинают действовать силы Ампера. На концах якоря они направлены в противоположные стороны, что создает крутящий момент. Ротор поворачивается на 180°. В этот момент крутящий момент становится равным нулю. Что бы вращение продолжалось необходимо переключить направление тока — провести коммутацию. По коллектору, который начал вращаться вместе с ротором, скользят щетки, в нужный момент они переходят с одной пластины на другую, меняя направление тока в обмотках ротора.
Частота вращения двигателя регулируется за счет изменения магнитного поля статора, которое в свою очередь генерируется током возбуждения двигателя. На этот ток можно повлиять реостатом, транзистором, т. е. любым устройством с активным сопротивлением. Таким образом, осуществляется электронная регулировка скорости.
Недостатки
Слабое место коллекторного двигателя — графитовые щетки, в процессе эксплуатации они истираются. При интенсивной нагрузке их приходится часто заменять. Кроме того, такой двигатель шумит и вибрирует во время работы, особенно на больших скоростях. Бороться с этими недостатками помогает использование в конструкциях качественных деталей и внешних антивибрационных элементов.
Бесколлекторный двигатель
Существует вид двигателей постоянного тока, в которых отсутствует щеточно-коллекторный узел. Ток в них изменяется с помощью электронных переключателей, что избавляет конструкцию от наличия щеток. Такие моторы называют вентильными. Принцип их работы аналогичен описанному выше. От коллекторных их отличает конструкция: магниты размещены на роторе, а обмотка на статоре.
Датчик углового положения ротора указывает электронному блоку, когда нужно менять направление тока. Единственный недостаток вентильного двигателя — дорогостоящие детали. По этой причине в ручных электроинструментах в основном используются коллекторные двигатели, с вентильным — лишь единичные модели: компании Makita и Hitachi предлагают аккумуляторные ударные шуруповерты, называя их инструментами будущего.
Редуктор
Механическую энергию, которую вырабатывает двигатель, нужно передать на рабочий орган машины (шпиндель). Эту функцию выполняет редуктор. Часто его называют понижающим. Скорость вращения входного вала высокая, механическая передача (одна или несколько) преобразует ее так, что на выходном валу получается меньшее число оборотов, но высокий крутящий момент.
В ручных машинах применяют разнообразные виды механических передач: зубчатая, ременная, цепная, планетарная. В большинстве случаев на выходе получается вращение. Но есть инструменты, в которых этот вид движения преобразуется в другой.
Ударный механизм перфоратора работает следующим образом. На валу установлен «пьяный» подшипник — качающийся привод, которой преобразует вращательное движение от двигателя в поступательное — цилиндра. В пространстве между цилиндром, поршнем и бойком, находится воздух. Он сжимается и заставляет поршень перемещаться сначала вперед к бойку, а затем возвращает его в исходное положение.
Редуктор электролобзика преобразует вращение вала двигателя в возвратно-поступательное движение ползуна. Расположенный вертикально ползун перемещает пилку вниз и вверх. Пилка опирается на опорный ролик. Наличие функции маятникового хода означает, что опорный ролик и вилка, на которой он держится, могут отклоняться назад. В результате пилка, кроме основного, совершает движение вперед и назад. Это увеличивает скорость прямолинейного реза. Ступени маятникового хода задаются степенью отклонения ролика.
В вибрационных шлифмашинах эксцентрик, установленный на валу, так преобразует вращательное движение, что подошва всего лишь колеблется с маленькой амплитудой. В эксцентриковых шлифовальных машинах вращательное движение рабочего органа сохраняется, но эксцентрик добавляет ему колебания. Такие преобразования позволяют выполнять с помощью этих инструментов тонкую шлифовку.
Особенности редукторов
Для пользователя имеет значение, из каких деталей изготовлен редуктор, от этого зависит его надежность и срок службы всего электроинструмента. В моделях бытового класса часто используются шестерни из пластмассы, в профессиональных — редуктор полностью металлический. Преимуществом считается, если и корпус то же выполнен из металла. В этом случае инструмент лучше выдерживает большие нагрузки и удары.
Важной функцией, которую может выполнять редуктор, является ступенчатое изменение частоты вращения выходного вала. Она доступна на отдельных моделях дрелей, шуруповертов. Механическое переключение скоростей позволяет работать с меньшей скоростью и большим крутящим моментом на первой передаче и с более высоким числом оборотов — на второй. Если сравнить технические характеристики в цифрах, то можно сразу заметить, что инструменты с двухскоростным (трехскоростные встречаются редко) редуктором отличаются большим числом оборотов по сравнению с обычными моделями, в которых обороты регулируются только электроникой. Эта особенность обеспечивает высокую производительность и оптимальный подбор режима работы.
Устройства управления
Для питания двигателя в электроинструментах используются различные схемы, в том числе микропроцессорные электроприводы. Обязательным элементом любой системы является выпрямитель. Он преобразует переменный ток сети в постоянный, который подается на электродвигатель. В аккумуляторных инструментах, которые питаются от батарей, выпрямитель не требуется.
Скорость вращения регулирует преобразователь частоты. Самый простой его вариант — это несколько реле, с помощью которых число оборотов можно установить вручную. В систему так же могут входить магнитные пускатели с кнопкой для изменения направления вращения двигателя (функция реверса). Устройство управления двигателем размещают под рукояткой или вблизи нее, где на корпус выводятся курок-выключатель, колесико регулировки скорости, кнопка реверса.
Для безопасной работы
К ручным инструментам предъявляются особые требования, связанные с безопасностью работы. Электропроводящие детали покрывают специальным материалом для защиты пользователя от поражения током. Многие производители, кроме основной изоляции, на случай ее повреждения, применяют дополнительную, получая, таким образом, двойную. Остальные защитные устройства, такие как муфты, фиксаторы применяются в зависимости от вида инструмента.
Бесколлекторные двигатели: преимущества и недостатки
Бесколлекторные двигатели — это вид синхронных устройств с постоянными магнитами, питаемыми от цепи постоянного тока через инвертор, управление которым осуществляется при помощи коллектора с обратной связью.
Преимущества и недостатки устройств
Бесколлекторный двигатель имеет следующие плюсы и минусы:
1. Наличие сложных электронных компонентов (к примеру, датчиков Холла). Они отличаются уязвимостью для действия жестких условий со стороны окружающей среды (высокой и низкой температуры, ионизирующих излучений и так далее). Если рассматривать коллекторные двигатели, то они вовсе не имеют электроники, из-за чего у них отсутствует данная уязвимость.
2. Сведение к минимуму электромагнитных помех, которые исходят от устройства. Во время работы щеточно-коллекторный контакт создает сильные помехи. Их частота зависит от частоты вращения мотора. А вот у бесколлекторной модели устройств основным источником помех можно назвать ШИМ силовых ключей, частота которого постоянна.
3. Требуется больше проводов для подключения. Если устройство работает в сложных условиях, то рекомендуется вынести управляющую электронику на большое расстояние. В таком случае каждая дополнительная цепь для подсоединения устройства требует наличия дополнительных жил в кабеле, что увеличивает его массу и габариты.
4. Отличный отвод тепла от обмотки. Последняя надежно закреплена на статоре и поэтому возможно обеспечить ее хороший тепловой контакт вместе с корпусом (корпус передает тепло, появляющееся в устройстве, в окружающую среду). У бесколлекторного мотора тепловой контакт с корпусом значительно лучше, чем у коллекторного электродвигателя.
5. Повышенная мощность. Это следствие высокой скорости вращения.
6. Большая скорость вращения. Коллекторные двигатели отличаются тем, что они имеют ограниченную скорость перемещения щетки по коллектору. Предельная скорость существенно ограничена. Бесколлекторные электродвигатели не имеют такого ограничения. Благодаря этому они могут работать на скоростях до нескольких сотен тысяч оборотов в минуту.
7. Сложная схема управления. Для управления коллекторным мотором нужен источник питания, а для бесколлекторного такой подход не подойдет (ему требуется контроллер).
8. Нет нужды в обслуживании коллекторного узла. Это актуально для моторов крупных и средних габаритов.
9. Надежность (по причине отсутствия коллектора). Это и есть главное отличие бесколлекторных двигателей.
Бесколлекторные модели устройств получили широкое применение в областях, где их технические характеристики дают им преимущество перед устройствами других типов (к примеру, там, где требуется скорость до нескольких десятков тысяч оборотов в минуту).
ПохожееИндуцированное напряжение — обзор
3.1.3.2 Цепь ротора
Вращающееся магнитное поле в воздушном зазоре индуцирует напряжения в цепи ротора, а также в цепи статора. Это индуцированное напряжение становится источником напряжения, приложенного к цепи ротора. Подобно уравнению. (3.17), индуцированное в цепи ротора напряжение может быть выражено как
(3.18) Er = 4.44NrϕKωrfr
, где Nr — общее количество витков на фазу, Kωr — коэффициент намотки для обмоток ротора, а fr — частота индуцированного напряжения в обмотке ротора.
Поскольку обмотка ротора испытывает изменение магнитного потока из-за разницы в скорости между вращающимся магнитным полем и ротором, частота fr индуцированного напряжения в цепи ротора становится разницей fs-f между частотой fs вращающегося магнитного поля. поле и частота вращения f ротора. Таким образом, индуцированное напряжение Er зависит от скорости ротора как
(3,19) Er = 4,44NrϕKωr × fr = 4,44NrϕKωr × (fs − f)
В состоянии покоя ( f = 0) частота fr такая же, как частота статора fs.Таким образом, наведенное напряжение в обмотке ротора будет максимальным, как
(3.20) Er0 = 4.44NrϕKωrfs
В этом случае, как и в случае с трансформатором, отношение индуцированных напряжений в двух обмотках равно отношению их количество ходов.
Индуцированное напряжение в закороченной обмотке ротора создает ток ротора. Крутящий момент в обмотке ротора создается за счет взаимодействия между этим током ротора и вращающимся магнитным полем статора. После этого ротор начнет вращаться.Предположим, что ротор в конечном итоге достигает установившейся скорости n (об / мин). Эта скорость ротора всегда меньше скорости вращающегося магнитного поля статора (т. Е. Синхронной скорости). Разница между синхронной скоростью ns и скоростью n ротора называется скоростью скольжения . Скорость скольжения, выраженная как часть синхронной скорости, называется скольжением s и может быть определена как
. Следует отметить, что скольжение является очень важным фактором в асинхронном двигателе, поскольку большинство его рабочих характеристик соответствует асинхронному двигателю. Двигатель, такой как развиваемый крутящий момент, ток, КПД и коэффициент мощности, зависит от рабочего скольжения.Рабочее скольжение зависит от нагрузки. Увеличение нагрузки приведет к замедлению ротора и увеличению скольжения. Уменьшение нагрузки приведет к ускорению ротора и уменьшению скольжения. Типичный асинхронный двигатель работает в диапазоне скольжения 0,01–0,05, т. Е. 1–5%. Например, четырехполюсный двигатель, работающий на частоте 60 Гц, имеет синхронную скорость 1800 об / мин. Если частота вращения ротора при полной нагрузке составляет 1765 об / мин, то скольжение составляет 1,9%.
Теперь рассмотрим индуцированное напряжение в обмотке ротора, когда ротор вращается со скоростью n (скольжение s ).Частота fr в цепи ротора при скольжении s называется частотой скольжения и задается как
(3,22) fr = fs − f = sfs
Из уравнения. (3.20) наведенные напряжения в цепи ротора при скольжении с становятся равными
(3.23) Er = 4.44NrϕKωr × fr = 4.44NrϕKωr × sfs = sEr0
. обмотка ротора прямо пропорциональна скольжению. Когда ротор неподвижен (т. Е. с = 1), наибольшее напряжение индуцируется в цепи ротора.По мере увеличения скорости ротора наведенное напряжение уменьшается. Если скорость ротора равна синхронной скорости, то индуцированное напряжение становится равным нулю.
Теперь мы готовы обсудить эквивалентную схему обмотки ротора. Из уравнения. Из (3.23) видно, что напряжение источника в цепи ротора sE0r. Эквивалентная схема ротора с сопротивлением Rr и индуктивностью рассеяния Llr цепи ротора изображена на рис. 3.19A. Эквивалентная схема ротора на рис.3.19A находится на частоте ротора fr. Таким образом, мы не можем объединить эту схему ротора с эквивалентной схемой статора, показанной на рис. 3.16, в единую схему, потому что две схемы различаются по рабочей частоте. Следовательно, нам нужно настроить частоту ротора, чтобы объединить две цепи. Разделив напряжение и импеданс, показанные на рис. 3.19A, на скольжение s , мы получим эквивалентную схему ротора, показанную на рис. 3.19B. В схеме ток ротора такой же, как на рис. 3.19А, но его рабочая частота равна частоте статора fs.Таким образом, это становится эквивалентной схемой ротора, если смотреть со стороны статора. Эти две цепи теперь можно соединить вместе, учитывая отношение витков a (= Ns / Nr) обмотки статора и обмотки ротора.
Рисунок 3.19. Эквивалентная схема ротора. (A) относится к стороне ротора и (B) относится к стороне статора.
Полная эквивалентная схема для каждой фазы трехфазного асинхронного двигателя показана на рис. 3.20.
Рисунок 3.20. Полная схема замещения фаз трехфазного асинхронного двигателя.
Эта эквивалентная схема аналогична схеме трансформатора, за исключением эффектов переменной скорости. Величины, которые отражаются от ротора к статору, обозначены штрихом (‘). С этого момента мы будем пропускать главный символ.
Подобно трехфазным токам обмотки статора, трехфазные токи, индуцируемые в обмотке ротора, также создают вращающееся магнитное поле Fr в воздушном зазоре, как показано на рис. 3.21A. С точки зрения конструкции ротора, это вращающееся магнитное поле Fr ротора вращается со скоростью nr (= ns-n).Поскольку сам ротор вращается с шагом n , с точки зрения конструкции статора вращающееся магнитное поле ротора вращается с синхронной скоростью ns (= nr + n). Таким образом, как магнитное поле статора, так и магнитное поле ротора всегда вращаются в воздушном зазоре с одинаковой синхронной скоростью. Эти магнитные поля статора и ротора поэтому остаются неподвижными по отношению друг к другу, как показано на рис. 3.21B. Считается, что взаимодействие между этими двумя полями создает крутящий момент.
Рисунок 3.21. Вращающиеся магнитные поля. (A) Магнитное поле от тока ротора и (B) магнитное поле от токов статора и ротора.
Объяснение скорости двигателя: погружение в двигатели переменного и постоянного тока
Скорость, крутящий момент, мощность и напряжение — все это важные факторы при выборе двигателя. В этом блоге, состоящем из двух частей, мы углубимся в особенности скорости двигателя. В части 1 мы обсудим, как скорость различается между типами двигателей, а в части 2 мы рассмотрим, когда следует рассмотреть возможность добавления коробки передач в приложение.
Скорость асинхронного двигателя переменного тока
Двигатели переменного токауникальны, потому что они созданы для работы на определенных скоростях независимо от их конструкции или производителя. Скорость двигателя переменного тока зависит от количества полюсов и частоты сети источника питания, а не от его напряжения. Обычные двигатели переменного тока состоят из двух или четырех полюсов. В полюсах статора создается магнитное поле, которое индуцирует результирующие магнитные поля в роторе, которые соответствуют частоте изменяющегося магнитного поля в статоре.Двухполюсные двигатели переменного тока, работающие с частотой 60 Гц, всегда будут работать со скоростью примерно 3600 об / мин, а четырехполюсные двигатели переменного тока будут иметь скорость около 1800 об / мин.
Скорость = 120 x частота (Гц) / число полюсов двигателя
Пример 120 x 60 Гц / 4 полюса = 1800 об / мин.
Имейте в виду, что скорость двигателя переменного тока не будет достигать этих точных значений — и будет немного ниже — потому что существует определенная величина скольжения, которая должна присутствовать для двигателя для создания крутящего момента.Ротор всегда будет вращаться медленнее, чем магнитное поле статора, и постоянно играет в догонялки. Это создает крутящий момент для запуска двигателя переменного тока. Разница между синхронными скоростями статора (3600 и 1800 об / мин) и фактической рабочей скоростью называется скольжением. (Дополнительную информацию о скольжении можно найти в нашем блоге «Синхронные и асинхронные двигатели: обнаруживая разницу».)
Элемент управления может использоваться для изменения скорости трехфазного двигателя переменного тока путем увеличения или уменьшения частоты, передаваемой на двигатель, в результате чего он ускоряется или замедляется.Кроме того, многие элементы управления переменного тока имеют однофазный вход, поэтому это позволяет запускать трехфазные двигатели на объектах, где отсутствует трехфазное питание.
Однако такая возможность изменять скорость не характерна для однофазных двигателей переменного тока. Эти двигатели подключаются непосредственно к стандартной розетке и работают с установленной доступной частотой. Исключением из этого практического правила будет потолочный вентилятор, который работает от однофазного двигателя переменного тока, но имеет три различных настройки скорости.
Скорость двигателя постоянного токаХотя двигатели постоянного тока с постоянными магнитами также построены с полюсами, эти полюса не влияют на скорость, как двигатели переменного тока, потому что есть несколько других факторов, влияющих на двигатели постоянного тока. Количество витков проволоки в якоре, рабочее напряжение двигателя и сила магнитов влияют на скорость двигателя. Если двигатель постоянного тока работает от батареи 12 В, это максимальное напряжение, доступное для устройства, и двигатель сможет работать только на номинальной скорости 12 В.Если батарея разряжена и подает меньшее напряжение, скорость соответственно уменьшится.
Теперь, если вы подключите тот же двигатель 12 В постоянного тока к источнику питания 24 В постоянного тока, ваша скорость обычно удваивается. Имейте в виду, что работа двигателя с удвоенной скоростью при одной и той же точке нагрузки / крутящего момента приведет к тому, что двигатель будет работать более интенсивно, создавая дополнительный нагрев, который со временем может вызвать преждевременный отказ двигателя.
Как и в случае трехфазных двигателей переменного тока и бесщеточных двигателей постоянного тока, средства управления могут использоваться с двигателями постоянного тока. Регуляторы постоянного тока регулируют скорость, изменяя напряжение, подаваемое на двигатель (это отличается от средств управления двигателем переменного тока, которые регулируют сетевую частоту двигателя).
Типичные скорости холостого хода или синхронные скорости для двигателя переменного тока с дробной мощностью 1800 или 3600 об / мин и от 1000 до 5000 об / мин для двигателей постоянного тока с дробной мощностью. Если приложение требует более низкой скорости и / или более высокого крутящего момента, следует рассмотреть вариант редукторного двигателя. Чтобы узнать больше о добавлении редуктора, ознакомьтесь с частью 2, «Объяснение скорости двигателя: когда использовать редуктор».
Выбор правильного электродвигателя
Производители все чаще задумываются об энергоэффективности .Более зеленая и экологически чистая экономика — одна из целей Конференции Организации Объединенных Наций по изменению климата 2015 года, которую взяли на себя многие государства. Но прежде всего в целях ограничения потребления и экономии в последние годы промышленность приобретает более энергоэффективное оборудование. Согласно исследованию Европейской комиссии, на двигатели приходится 65% промышленного потребления энергии в Европе. Поэтому принятие мер в отношении двигателей является важным шагом на пути к сокращению выбросов CO2.Комиссия даже прогнозирует, что к 2020 году можно повысить энергоэффективность двигателей европейского производства на 20–30%. В результате будет на 63 миллиона тонн меньше CO2 в атмосфере и на 135 миллиардов киловатт-часов.
Если вы также хотите интегрировать энергоэффективные двигатели и получить экономию, внося свой вклад в развитие планеты, вам сначала нужно взглянуть на стандарты энергоэффективности для двигателей в вашей стране или географической области . Но будьте осторожны, эти стандарты распространяются не на все двигатели, а только на асинхронные электродвигатели переменного тока .
Международные стандарты
- Международная электротехническая комиссия (МЭК) определила классы энергоэффективности для электродвигателей, размещаемых на рынке, известные как код IE, которые кратко изложены в международном стандарте МЭК .
- IEC определила четыре уровня энергоэффективности, которые определяют энергетические характеристики двигателя:
- IE1 относится к СТАНДАРТНОЙ эффективности
- IE2 относится к ВЫСОКОМУ КПД
- IE3 относится к эффективности PREMIUM
- IE4 , все еще изучается, обещает эффективность SUPER PREMIUM
- МЭК также внедрила стандарт IEC 60034-2-1: 2014 для испытания электродвигателей .Многие страны используют национальные стандарты испытаний, а также ссылаются на международный стандарт IEC 60034-2-1.
В Европе
ЕС уже принял несколько директив, направленных на снижение энергопотребления двигателей, включая обязательство производителей размещать на рынке энергоэффективные двигатели:
- Следовательно, класс IE2 является обязательным для всех двигателей с 2011 года
- Класс IE3 является обязательным с января 2015 года для двигателей мощностью 7.От 5 до 375 кВт (или IE2, если эти двигатели оснащены преобразователем частоты)
- Класс IE3 является обязательным с января 2017 года для двигателей мощностью от 0,75 до 375 кВт (или IE2, если эти двигатели имеют преобразователь частоты).
В США
В США действуют стандарты, определенные американской ассоциацией NEMA (Национальная ассоциация производителей электрооборудования). С 2007 года минимальный требуемый уровень установлен на IE2.
Такая же классификация применяется к Австралия и Новой Зеландии .
Азия
В Китай корейские стандарты MEPS (минимальный стандарт энергоэффективности) применяются к трехфазным асинхронным двигателям малого и среднего размера с 2002 года (GB 18693). В 2012 году стандарты MEPS были гармонизированы со стандартами IEC, перейдя от IE1 к IE2, а теперь и к IE3.
Япония гармонизировала свои национальные правила с классами эффективности IEC и включила электродвигатели IE2 и IE3 в свою программу Top Runner в 2014 году.Представленная в 1999 году программа Top Runner вынуждает японских производителей постоянно предлагать на рынке новые модели, которые более энергоэффективны, чем предыдущие поколения, тем самым стимулируя эмуляцию и инновации в области энергетики.
Индия имеет знак сравнительной эффективности с 2009 года и национальный стандарт на уровне IE2 с 2012 года.
Основы щеточного двигателя постоянного тока| Portescap
ОСНОВА ДЛЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Технология Brush DCPortescap основана на конструкции, основанной на безжелезном роторе (самоподдерживающейся катушке) в сочетании с системой коммутации из благородного металла или углерода, меди и редкоземельного магнита или магнита Alnico.Он предлагает явные преимущества для высокопроизводительных приводных и сервосистем: низкое трение, низкое пусковое напряжение, отсутствие потерь в стали, высокий КПД, хорошее тепловыделение, линейная функция крутящего момента и скорости. Все эти факторы облегчают использование и упрощают сервоконтур. Для систем с инкрементальным перемещением, где низкая инерция ротора обеспечивает исключительное ускорение, и для всего оборудования с батарейным питанием, где эффективность является главной проблемой, щеточные электродвигатели постоянного тока предлагают оптимальные решения.
Схема двигателя постоянного токаКОНСТРУКЦИЯ ДВИГАТЕЛЯ С ЩЕТКОЙ — ТРИ ОСНОВНЫХ УЗЛА
Все двигатели постоянного тока состоят из трех основных узлов:
- статор
- крышка щеткодержателя
- ротор
1.Статор
Статор состоит из центрального и цилиндрического двухполюсного постоянного магнита, сердечника, поддерживающего подшипники, и стальной трубки, замыкающей магнитную цепь. Высококачественные редкоземельные магниты гарантируют выдающуюся производительность в небольших габаритах. Спеченные подшипники и шариковые подшипники доступны в зависимости от нагрузок и требований вашего приложения.
2. Заглушка держателя щеток
Колпачок щеткодержателя изготовлен из пластика.В зависимости от предполагаемого использования двигателя щетка может быть двух разных типов; углеродистая или многопроволочная. Типы углерода используют медный графит или серебряный графит и идеально подходят для приложений с инкрементным перемещением, где требуется высокий постоянный и пиковый крутящий момент. Многопроволочный тип использует драгоценный металл и гарантирует низкое пусковое напряжение и повышенную эффективность, что идеально подходит для портативных устройств с батарейным питанием. Инженер Portescap может спроектировать заглушки, которые уменьшают электромагнитный шум в соответствии с требованиями ЭМС.
3. Ротор
Ротор — это сердце двигателя постоянного тока Portescap. Катушка непосредственно и непрерывно наматывается на цилиндрическую опору, которая позже удаляется, что устраняет чрезмерные воздушные зазоры и неактивные головки катушек, которые не вносят вклада в создание крутящего момента. Самонесущая катушка не требует металлической конструкции и, следовательно, обеспечивает низкий момент инерции и отсутствие зазубрин (ротор останавливается в любом положении). В отличие от других традиционных технологий катушек постоянного тока, из-за отсутствия железа отсутствуют гистерезис, потери на вихревые токи или магнитное насыщение.Двигатель имеет абсолютно линейное поведение скорости и момента, а скорость работы зависит только от напряжения питания и момента нагрузки. Portescap, используя свое собственное ноу-хау, разработала несколько автоматических намоточных машин для различных размеров корпуса и продолжает совершенствовать методы намотки для увеличения выходной мощности.
Комбинация щеток / коллекторов оптимизирована, чтобы выдерживать длительный срок службы при частоте вращения до 12 000 об / мин и обеспечивать высокую надежность. Продукция Portescap DC может обеспечивать крутящий момент в диапазоне от 0.От 6 мНм до 150 мНм в непрерывном режиме и от 2,5 до 600 мНм в прерывистом режиме.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ДВИГАТЕЛЯ С ЩЕТОЧНЫМ КОЛПАЧКОМ: РОТОРНЫЕ ДВИГАТЕЛИ постоянного тока без железа
Ротор обычного двигателя постоянного тока с железным сердечником изготовлен из медной проволоки, намотанной на полюса его железного сердечника. Такая конструкция ротора дает следующие результаты:
- Большая инерция из-за массы железа, которая затрудняет быстрый запуск и остановку
- Зубчатый эффект и предпочтительное положение ротора, вызванные притяжением полюсов железа к постоянному магниту.
- Значительная индуктивность катушки, вызывающая искрение во время коммутации. Эта дуга является причиной электрического шума, а с другой — сильной электроэрозии щеток. Именно по последней причине в обычных двигателях используются щетки угольного типа. Катушка ротора без железа
- обеспечивает высокое ускорение
Самонесущий электродвигатель постоянного тока без железа от Portescap имеет много преимуществ по сравнению с обычными электродвигателями с железным сердечником:
- высокое отношение крутящего момента к моменту инерции
- Отсутствие предпочтительных положений ротора
- очень низкий крутящий момент и изменение обратной ЭДС в зависимости от положения якоря
- практически нулевой гистерезис и потери на вихревые токи
- незначительная электрическая постоянная времени
- почти нет риска размагничивания, поэтому ускорение происходит быстро.
- Незначительное падение напряжения на щетках (с многопроволочными щетками)
- нижнее вязкостное демпфирование
- линейная характеристика
Доказано, что система Portescap REE увеличивает срок службы двигателя до 1000 процентов.
Двумя наиболее важными факторами, влияющими на срок службы коммутатора в щеточном двигателе постоянного тока, являются механический износ щеток из-за скользящих контактов и эрозия электродов из-за электрической дуги.Превосходная обработка поверхности, точность коллектора наряду с улучшенными материалами, такими как переключатели из драгоценных металлов с соответствующими сплавами, помогли снизить механический износ щеток. Чтобы эффективно снизить электроэрозию при одновременном продлении срока службы коммутатора, Portescap усовершенствовал свою запатентованную систему катушек REE (уменьшение электроэрозии). Система REE снижает эффективную индуктивность коммутации щеток за счет оптимизации взаимной индукции сегментов катушки. Чтобы сравнить и сопоставить преимущества системы REE, Portescap провел испытания двигателей с оптимизацией катушки REE и без нее.Износ поверхности коллектора улучшился от 100 до 300 процентов, как показано на Рисунке 5. Змеевики 4, 5 и 6 армированы РЗЭ, а 1, 2 и 3 — без РЗЭ.
ТЕОРИЯ ДВИГАТЕЛЯ С ЩЕТКОЙ — БЕЗЖЕЛЕЗНЫЕ РОТОРЫ
Электромеханические свойства двигателей с ротором без железа можно описать с помощью следующих уравнений:
1. Напряжение источника питания U0 равно сумме падения напряжения, создаваемого током I в омическом сопротивлении RM обмотки ротора, и напряжения Ui, индуцированного в роторе:
U0 = I x RM + Ui (1)
2.Напряжение Ui, индуцированное в роторе, пропорционально угловой скорости ротора ω: Ui = kE x ω (2)
Следует отметить, что существует следующая зависимость между угловой скоростью ωexpress в радианах в секунду и скоростью вращения n, выраженной в оборотах в минуту: ω = (2π n) / 60
3. Крутящий момент ротора M пропорционален току ротора I:
M = kT x I (3)
Здесь можно упомянуть, что крутящий момент M ротора равен сумме крутящего момента нагрузки ML, создаваемого двигателем, и момента трения Mf двигателя:
M = ML + Mf
Подставляя фундаментальные уравнения (2) и (3) в (1), мы получаем характеристики крутящего момента / угловой скорости для двигателя постоянного тока с ротором без железа:
U0 = M x RM + kE x ω (4)
Вычислив постоянные kE и kT из размеров двигателя, количества витков на обмотку, количества витков, диаметра ротора и магнитного поля в воздушном зазоре, мы находим для микромотора постоянного тока с ротор без железа:
M / I = Ui / ω = k (5)
Это означает, что k = kE = kT
Тождество kE = kT также очевидно из следующих энергетических соображений:
Электрическая мощность Pe = U0 x I, которая подводится к двигателю, должна быть равна сумме механической мощности Pm = M x ω, производимой ротором, и рассеиваемой мощности (согласно закону Джоуля) Pv = I2 x RM:
Pe = U0 x I = M x ω + I2 x RM = Pm + Pv
Кроме того, умножая уравнение (1) на I, мы также получаем формулу для электрической мощности Pe:
Pe = U0 x I = I2 x RM + Ui x I
Эквивалентность двух уравнений дает M x ω = Ui x I или Ui / ω = M / I и kE = kT = k
Quod erat manifestrandum.Используя приведенные выше соотношения, мы можем записать основные уравнения (1) и (2) следующим образом:
U0 = I x RM + k x ω (6)
а также:
U0 = M x RM / + k x ω (7)
Графическая экспресс-характеристика «скорость-момент»:
Чтобы преодолеть момент трения Mf из-за трения щеток и подшипников, двигатель потребляет ток холостого хода I0. Это дает
Mf = k x I0
а также:
U0 = I0 x RM + k x ω0, где
ω0 = 2π / 60 x n0, следовательно:
k = U0 — I0 / ω0 x RM (8)
Таким образом, возможно ли вычислить постоянную двигателя k со скоростью холостого хода n0, током холостого хода I0 и сопротивлением ротора RM.
Пусковой ток Id рассчитывается следующим образом:
Id = U0 / RM
Следует помнить, что СО в значительной степени зависит от температуры; другими словами, сопротивление ротора увеличивается с нагревом двигателя из-за рассеиваемой мощности (закон Джоуля):
RM = RM0 (1 + γ x ∆T)
Где γ — температурный коэффициент меди (γ = 0,004 / ° C).
Поскольку медная масса катушек сравнительно мала, она очень быстро нагревается под действием тока ротора, особенно в случае медленного или многократного пуска.Крутящий момент Md, создаваемый пусковым током Id, получается следующим образом:
Md = Id x k — Mf = (Id — I0) k (9)
Применяя уравнение (1), мы можем вычислить угловую скорость ω, возникающую при напряжении U0 с моментом нагрузки Mi. Сначала определим ток, необходимый для получения крутящего момента M = ML + Mf:
I = (ML + Mf) / k Поскольку Mf / k = I0, мы также можем написать
I = (ML / k) + I0 (10)
Для угловой скорости ω получаем соотношение
ω = (U0 — I x RM) / k (11)
= U0 / k — RM / k2 (ML + Mf)
, в котором снова должна быть учтена температурная зависимость сопротивления ротора RM; Другими словами, необходимо рассчитать значение RM при рабочей температуре ротора.С другой стороны, с помощью уравнения (6) мы можем вычислить ток I и момент нагрузки ML для заданной угловой скорости ω и заданного напряжения U0:
I = (U0 — k x ω) RM = Id — k / RM ω (12)
А с уравнением (10)
ML = (I — I0) k
Получаем значение ML:
ML = (I — I0) k — k2 / RM ω
Чаще всего возникает проблема определения напряжения источника питания U0, необходимого для получения скорости вращения n для заданного момента нагрузки ML (угловая скорость ω = n x 2π / 60).Вводя уравнение (10) в (6), получаем:
U0 = (ML + I0) / k RM + k x ω (13)
Практические примеры расчетов
Обратите внимание, что повсюду используется Международная система единиц (S.I.).
1. Предположим, что для двигателя Portescap® 23D21-216E мы хотим вычислить постоянную двигателя k, пусковой ток Id и пусковой крутящий момент Md при температуре ротора 40 ° C. При напряжении питания 12 В, скорость холостого хода n0 составляет 4900 об / мин (ω0 = 513 рад / с), ток холостого хода I0 = 12 мА и сопротивление RM0 = 9.5 Ом при 22 ° C.
Вводя значения ω0, I0, RM0 и U0 в уравнение (8), мы получаем постоянную двигателя k для двигателя 23D21-216E: k = 12 — 0,012 x 9,5 = 0,0232 Vs 15
Перед расчетом пускового тока необходимо рассчитать сопротивление ротора при 40 ° C. При ∆T = 18 ° C и RM0 = 9,5 Ом получаем RM = (1 + 0,004 x 18) = 9,5 x 1,07 = 10,2 Ом.
Пусковой ток Id при температуре ротора 40 ° C становится
Id = (U0 / RM) = (12/10.2) = 1,18 А
, а пусковой момент Md согласно уравнению (9) равен Md = k (Id — I0) = 0,0232 (1,18 — 0,012) = 0,027 Нм.
2. Зададимся вопросом: какую скорость вращения n достигает двигатель при нагрузочном моменте 0,008 Нм и напряжении питания 9 В при температуре ротора 40 ° C?
Используя уравнение (10), мы сначала вычисляем ток, который подается на двигатель при следующих условиях:
I = (ML / k) + I0 = (0.008 / 0,0232) + 0,012 = 0,357 А
Уравнение (11) дает угловую скорость ω:
ω = (U0 — I x RM) / k = (9 — 0,357 x 10,2) / 0,0232 = 231 рад / с
и скорость вращения n: n = 60 / 2π ω = 2200 об / мин
Таким образом, двигатель достигает скорости 2200 об / мин и потребляет ток 357 мА.
3. Теперь вычислим крутящий момент M при заданной скорости вращения n 3000 об / мин (ω = 314 рад / с) и напряжении источника питания U0 15 В; уравнение (12) дает значение тока:
I = (U0 — k x ω) / RM = Id — k / RM x ω
= 1.18 — (0,0232 / 10,2) x 314 = 0,466 А
и крутящий момент нагрузки ML:
ML = k (I — I0)
= 0,0232 (0,466 — 0,012)
= 0,0105 Нм
(ML = 10,5 мНм)
4. Наконец, определим напряжение источника питания U0, необходимое для получения скорости вращения n 4000 об / мин (ω = 419 рад / с) с моментом нагрузки ML 0,008 Нм, температура ротора снова составляет 40 ° C ( RM = 10,2 Ом).
Как мы уже подсчитали, ток I необходим для крутящего момента 0.008 Нм равно 0,357 А
U0 = I x RM + k x ω
= 0,357 х 10,2 + 0,0232 х 419
= 13,4 вольт
ПРИМЕНЕНИЕ ДВИГАТЕЛЯ С ЩЕТКОЙ
МЕДИЦИНСКИЙ
- Хирургические инструменты с приводом
- Стоматологические ручные инструменты
- Инфузионные, волюметрические и инсулиновые насосы
- Диагностическое и сканирующее оборудование
Преимущества: анализаторы с уменьшенной занимаемой площадью, высокой эффективностью и точностью позиционирования образца
БЕЗОПАСНОСТЬ И ДОСТУП
- Камеры видеонаблюдения
- Замки
- Считыватели штрих-кода
- Системы оповещения
Преимущества: низкий уровень шума и вибрации, высокая мощность и превосходная эффективность
АЭРОКОСМИЧЕСКАЯ ОБОРОНА И ОБОРОНА
- Датчик в кабине
- Индикаторы
- Спутников
- Оптические сканеры
Преимущества: низкая инерция, компактность и вес, высокая эффективность
РОБОТОТЕХНИКА И ЗАВОДСКАЯ АВТОМАТИЗАЦИЯ
- Конвейеры
- Автомобили с дистанционным управлением
- Промышленные роботы
Преимущества: высокая мощность и малый вес
РУЧНОЙ ИНСТРУМЕНТ
Ножницы Ручные инструменты для обрезки Пистолеты для гвоздей
Преимущества: высокая эффективность, компактность и вес, низкий уровень шума.
ДРУГОЕ
Оргтехника Полупроводники Модельные железные дороги Обработка документов Оптика Автомобильная промышленность Транспорт Аудио видео
Преимущества: низкий уровень шума, высокая мощность, лучшее регулирование двигателя
Область применения
МЕДИЦИНСКИЕ АНАЛИЗАТОРЫ Portescap решает множество задач, связанных с анализаторами, от анализа проб до быстрого сканирования и обнаружения молекулярных механизмов в жидкостях и газах с помощью щеточных двигателей постоянного тока без сердечника.Для приложений с высокой пропускной способностью — тех, где за час анализируется более 1000 анализов — подходящим выбором являются высокоэффективные и высокоскоростные двигатели, такие как щеточные двигатели постоянного тока без сердечника. Их низкая инерция ротора и короткая механическая постоянная времени делают их идеально подходящими для таких применений. Например, 22-миллиметровый бесщеточный двигатель постоянного тока Portescap обеспечивает скорость холостого хода 8000 об / мин и механическую постоянную времени 6,8 миллисекунды. Другая функция анализатора, которая играет жизненно важную роль в их выводе, — это сбор образцов из пробирок или анализов и их передача до систем измерения, основанных на фотометрии, хроматографии или других подходящих схемах.И здесь бесщеточный электродвигатель постоянного тока очень применим благодаря удельной мощности, которую он умещает в небольшом размере корпуса. Вы можете максимизировать производительность своего приложения с помощью рабочей лошадки диаметром 16 или 22 мм от Portescap.
Обзор приложений
ИНФУЗИОННЫЕ НАСОСЫ Щеточные электродвигатели постоянного тока без сердечника обладают значительными преимуществами по сравнению со своими щеточными аналогами с железным сердечником для некоторых применений насосов для интенсивной терапии, где преимущества варьируются от повышения эффективности до более высокой удельной мощности при меньшем размере корпуса.Одним из факторов, ухудшающих характеристики двигателя при длительном использовании, является нагрев двигателя с соответствующими потерями в Джоулях. В терминологии двигателя это определяется коэффициентом регулирования двигателя, определяемым сопротивлением катушки R и постоянной крутящего момента k. Чем ниже коэффициент регулирования двигателя (R / k2), тем лучше двигатель будет работать в течение всего срока службы, сохраняя при этом более высокий КПД. С одними из самых низких факторов регулирования двигателя последняя инновация Portescap в двигателях Athlonix уже приносит пользу приложениям в области инфузионных насосов, предлагая на выбор более мощный двигатель с меньшими тепловыми потерями, более высокую эффективность и удельную мощность в компактных корпусах.
Обзор приложений
ОБОРУДОВАНИЕ ДЛЯ СБОРКИ ЭЛЕКТРОНИКИ НА ПОВЕРХНОСТНОЙ МОНТАЖЕ Как универсальные 35-миллиметровые двигатели без сердечника Portescap с коммутацией угольных щеток выделяются при сборке электроники, робототехнике и автоматизированном машинном оборудовании и стали рабочей лошадкой в некоторых механизмах захвата и установки, используемых в технологии поверхностного монтажа. Наши 35-миллиметровые двигатели с низким моментом инерции могут обеспечивать высокое ускорение, низкие электромагнитные помехи и частые пусковые остановки, необходимые машинам, при сохранении небольших и легких конвертов.
ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
Ротор в сборе
Щеточный двигатель постоянного тока в разрезе
Электрические асинхронные двигатели — синхронная скорость
Синхронная скорость для электрического асинхронного двигателя определяется
- частотой источника питания и
- числом полюсов в обмотке двигателя.
Синхронная скорость может быть рассчитана как:
n = f (2 / p) 60 (1)
, где
n = скорость вращения вала (об / мин, об / мин)
f = частота электропитания (Гц, циклы / с, 1 / с)
p = количество полюсов
Примечание — an асинхронный двигатель никогда не достигнет своей синхронной скорости.Если бы это было так — ротор казался бы неподвижным по отношению к вращающемуся полю статора, поскольку он вращался бы с той же скоростью. При отсутствии относительного движения между статором и полем ротора в двигателе не будет индуцироваться напряжение. Поэтому скорость асинхронного двигателя ограничена скоростью ниже синхронной, а разница между синхронной скоростью и фактической скоростью называется скольжением.
Пример — синхронная скорость двухполюсного электродвигателя
На двухполюсный двигатель подается мощность с частотой 50 Гц (1 / с) .Скорость вращения можно рассчитать как
n = (50 1 / с) (2/2) (60 с / мин)
= 3000 об / мин (1 / мин)
Синхронный скорость вращения при разных частотах и количестве полюсов
| Скорость вращения вала — n — (об / мин, об / мин) | ||||||
|---|---|---|---|---|---|---|
| Частота — f — (Гц) | Количество полюса — p — | |||||
| 2 | 4 | 6 | 8 | 10 | 12 | |
| 10 | 600 | 300 | 6 906 9036 9036 9036 100||||
| 20 | 1200 | 600 | 400 | 300 | 240 | 200 |
| 30 | 1800 | 900 | 600 | 90 636450360 | 300 | |
| 40 | 2400 | 1200 | 800 | 600 | 480 | 400 |
| 50 1) | ||||||
50 1)| 3000 9036 1000 | 750 | 600 | 500 | | ||
| 60 2) | 3600 | 1800 | 1200 | 900 | 720 | 600 |
| 906 36 906 | 1050 | 840 | 700 | |||
| 80 | 4800 | 2400 | 1600 | 1200 | 960 | 800 |
| 906 906 906 906 1080 | 900 | |||||
| 100 | 6000 | 3000 | 2000 | 1500 | 1200 | 1000 |
- Двигатели, рассчитанные на 50 Гц, чаще всего встречаются за пределами U.S
- Двигатели, рассчитанные на 60 Гц, наиболее распространены в США.
Частотно-регулируемый привод
Частотно-регулируемый привод модулирует скорость электродвигателя путем изменения частоты источника питания.
Двигатели переменного тока
4 Двигателя переменного тока
Общей чертой всех двигателей переменного тока является вращающееся магнитное поле, создаваемое обмотками статора.
Эту концепцию можно проиллюстрировать для трехфазных двигателей, рассмотрев три катушки, равномерно размещенные вокруг ротора.Каждая катушка подключена к одной фазе трехфазного источника питания (Рисунок 4-1).
Рисунок 4-1: Развитие вращающегося магнитного поля
Рисунок 4-2: Результирующие поля
Ток через каждую катушку синусоидально изменяется со временем, сдвиг по фазе на 120o с другими катушками. Это означает, что ток в катушке B задерживается на 1/3 периода по сравнению с током в A, а ток в катушке C задерживается на 1/3 периода по сравнению с током в B (рисунок 4-2).
Ротор видит чистое вращающееся магнитное поле, созданное тремя катушками, и вращается, создавая крутящий момент на приводном валу двигателя. Это поле вращается либо по часовой стрелке, либо против часовой стрелки, в зависимости от порядка фаз, подключенных к двигателю.
Изменение направления вращения трехфазного двигателя просто достигается путем изменения порядка подключения двух из трех проводов.
Скорость вращающегося поля зависит от количества магнитных полюсов в статоре и называется синхронной скоростью.
Частота относится к частоте источника питания (например, 60 Гц).
Количество магнитных полюсов (или просто полюсов) является основным расчетным фактором, влияющим на скорость в двигателях переменного тока.
а. Трехфазные асинхронные двигатели
Ротор асинхронного двигателя не вращается с синхронной скоростью или скоростью магнитного поля статора, но немного отстает. Это отставание обычно выражается в процентах от синхронной скорости, называемой «скольжением». Скольжение двигателя является результатом взаимодействия магнитного поля статора и магнитного поля, возникающего в результате индуцированных токов, протекающих в роторе.Стержни ротора прорезают магнитные силовые линии, создавая полезный крутящий момент. Поскольку двигатель замедляется (т.е. увеличивается скольжение) при добавлении нагрузки, создается больший крутящий момент.
Трехфазные асинхронные двигателиочень прочные и надежные и являются наиболее распространенным типом используемых двигателей.
К сожалению, коэффициент мощности имеет тенденцию к снижению при пониженных нагрузках. Это связано с током, который подается только для поддержания магнитного поля.
г. Двигатели с короткозамкнутым ротором
Ротор двигателя с короткозамкнутым ротором изготовлен из токопроводящих стержней, которые параллельны валу и закорочены концевыми кольцами, в которых они физически поддерживаются (Рисунок 4-3).
Рисунок 4-3: Беличья клетка
Размер, форма и сопротивление прутка существенно влияют на характеристики крутящего момента и скорости. Обрыв стержня ротора или соединения концевого кольца может привести к более серьезному состоянию, включая высокочастотные вибрации и даже отказ двигателя.
Для облегчения выбора двигателей NEMA (Национальная ассоциация производителей электрооборудования) присвоила буквенные обозначения A, B, C и D для описания стандартных расчетных характеристик крутящего момента и скорости двигателей с короткозамкнутым ротором мощностью до 200 л.с. (Таблица 4 1 и рисунок 4-4).
| Конструкция Тип | Пуск Момент | Начало Текущее | Пробой Крутящий момент | Полная нагрузка Скольжение | Типичный Приложения |
|---|---|---|---|---|---|
| A Редко используется | нормальный | высокая | высокая | <5% | станки, вентиляторы, насосы |
| B | нормальный | нормальный | нормальный | <5% | такой же, как A |
| С | высокая | нормальный | низкий | <5% | компрессоры, дробилки, конвейеры |
| D | очень высокий | низкий | н / д | > 5% | пробивные прессы, подъемники с высокой инерционной нагрузкой |
Рисунок 4-4: Графики крутящего момента и скорости для двигателей конструкции A, B, C, D
Тип конструкции B является наиболее распространенным и подходит для большинства двигателей.
Двигатели конструкции A в настоящее время обычно не используются из-за высокого пускового тока. Вместо этого следует указать двигатели конструкции B.
Двигатели также называют двигателями общего, определенного или специального назначения.
Двигатель общего назначения — это любой двигатель, рассчитанный на стандартные номинальные характеристики, например, указанные в публикации стандартов Национальной ассоциации производителей электрооборудования (NEMA) MG1-1993, параграф 14.02.
Двигатель определенного назначения — это любой двигатель, рассчитанный на стандартные характеристики со стандартными рабочими характеристиками или стандартной механической конструкцией для использования в условиях эксплуатации, отличных от обычных, таких как те, которые указаны в публикации стандартов NEMA MG1-1993.
Двигатель специального назначения — это любой двигатель (кроме двигателя общего назначения или двигателя определенного назначения), который имеет особые рабочие характеристики или особую механическую конструкцию (или и то, и другое), предназначенный для конкретного применения. Двигатели мощностью более 500 л.с. обычно считаются специальными, а не универсальными, и предназначены для конкретного применения.
г. Асинхронный двигатель с обмоткой ротора
Асинхронный двигатель с фазным ротором работает по тем же принципам, что и двигатель с короткозамкнутым ротором, но отличается конструкцией ротора.Вместо закороченных стержней ротор состоит из обмоток, которые заканчиваются контактными кольцами на валу.
Этот тип двигателя используется в специальных приложениях, где требуется высокий пусковой момент. Подключение внешнего сопротивления к цепи ротора через контактные кольца позволяет изменять характеристики крутящего момента двигателя и скорости (Рисунок 4-5 и Рисунок 4-6). После запуска токосъемные кольца замыкаются.
Короткое замыкание внешнего соединения приводит к работе, аналогичной работе двигателей с короткозамкнутым ротором.
Рисунок 4-5: Асинхронный двигатель с обмоткой ротора
Изменение диапазона скорости примерно 5: 1 может быть достигнуто путем добавления внешнего сопротивления в цепь ротора; однако это происходит за счет электрического КПД, если не используется схема рекуперации энергии скольжения.
Рисунок 4-6: График крутящего момента ротора и скорости вращения для различных внешних сопротивлений
Максимальный крутящий момент, который может создать двигатель с фазным ротором, определяется конструкцией его ротора, но скорость, при которой этот крутящий момент создается, зависит от внешнего сопротивления ротора.
Каждая конструкция ротора с обмоткой имеет семейство кривых крутящего момента-скорости, которые соответствуют различным значениям внешнего сопротивления ротора.
г. Однофазные асинхронные двигатели
Когда однофазный асинхронный двигатель работает, он создает вращающееся магнитное поле, но до того, как ротор начинает вращаться, статор создает только пульсирующее стационарное поле.
Для создания вращающегося поля и, следовательно, пускового момента, вспомогательная пусковая обмотка размещается под прямым углом к основной обмотке статора, так что токи через них не совпадают по фазе на 90o (1/4 периода времени).При этом магнитные поля отклоняются от выравнивания на 90 °. В результате ротор хочет выровнять магнитные полюса, что создает пусковой момент. Физическое размещение пусковой обмотки и ее относительная полярность по отношению к основной обмотке приводит к тому, что двигатель при запуске постоянно вращается в одном направлении. После запуска двигателя вспомогательная обмотка часто отключается от цепи с помощью центробежного переключателя.
Неисправность цепи пусковой обмотки приведет к тому, что двигатель будет издавать тихий гудящий звук и запустится в любом направлении, если осторожно слегка покрутить его рукой.
Однофазные асинхронные двигатели используются в приложениях, где трехфазное питание недоступно, и обычно их мощность составляет от долей до 10 л.с. Возможны однофазные двигатели мощностью более 10 л.с., которые обычно сочетаются с силовой электроникой для ограничения пусковых токов, которые в противном случае были бы очень высокими.
| Тип двигателя | Пусковой момент | КПД | Приложение |
|---|---|---|---|
| Затененный полюс | Низкий | Низкий | Вентиляторы с прямым приводом |
| Разделенная фаза | Низкий | Средний | Вентиляторы с прямым приводом, центробежные насосы, воздушные и холодильные компрессоры |
| Средний | Средний | Ременные вентиляторы, компрессоры воздуха и охлаждения, основные приборы | |
| Конденсатор пусковой | Средний | Средний | Ременные вентиляторы, компрессоры, центробежные насосы, промышленные, сельскохозяйственные, основные бытовые приборы, коммерческие приборы, бизнес-оборудование |
| Высокая | Средний | Насосы прямого вытеснения, воздушные и холодильные компрессоры. | |
| Конденсатор пуск / работа | Средний | Высокая | Ременные вентиляторы, центробежные насосы |
| Высокая | Высокая | Поршневые насосы, воздушные и холодильные компрессоры, промышленные, сельскохозяйственные, основная бытовая техника, коммерческая техника, торговое оборудование | |
| Постоянный разделенный конденсатор | Низкий | Высокая | Вентиляторы с прямым приводом, Холодильный компрессор, Торговое оборудование |
д.Двухфазные двигатели
В двигателяхс расщепленной фазой используется пусковая обмотка с другим отношением сопротивления к реактивному сопротивлению, чем у обмотки главного статора, чтобы обеспечить разность фаз, необходимую для пуска (Рисунок 4 7).
Разность фаз не желаемая 90 °, и магнитные поля не равны. Это приводит к более низкому пусковому крутящему моменту по сравнению с двигателями других конструкций.
Рисунок 4-7: Двигатель с расщепленной фазой
Пусковой крутящий момент двигателя с разделенной фазой, однако, достаточен для многих приложений, таких как циркуляционные вентиляторы охлаждаемых витрин и некоторые электроинструменты (например,грамм. сверлильный станок). Этот тип двигателя дешев в производстве и поэтому является фаворитом в OEM-продуктах. Типичные размеры составляют примерно до 1/2 л.с.
ф. Конденсаторные двигатели
Во многих однофазных двигателях используется конденсатор, включенный последовательно с одной из обмоток статора, чтобы оптимизировать разность фаз поля для запуска. Емкостной ток подводит напряжение на 90o. Добавление емкости вызывает сдвиг фаз в одной обмотке относительно другой. Результатом является более высокий пусковой момент, чем может обеспечить двигатель с расщепленной фазой.
Конденсаторные двигатели используются в системах с высоким пусковым моментом, таких как компрессоры и кондиционеры. Типичные размеры составляют примерно до 10 л.с.
Конденсаторный двигатель
В двигателяхс конденсаторным режимом используется конденсатор, постоянно включенный последовательно с одной из пусковых обмоток, для достижения компромисса между хорошим пусковым моментом и хорошими рабочими характеристиками (Рисунок 4-8). Эта конструкция дешевле, чем другие конденсаторные двигатели, в которых используются системы переключения конденсаторов.
Эти двигатели обеспечивают лучший пусковой момент и рабочие характеристики, чем двигатели с расщепленной фазой, и их иногда называют двигателями с постоянным разделенным конденсатором (PSC).
В новых двигателях печных вентиляторов иногда используются конденсаторные двигатели.
Рисунок 4-8: Конденсаторный двигатель
Конденсаторный пусковой двигатель
В двигателях с конденсаторным пуском конденсатор, подключенный последовательно с пусковой обмоткой, рассчитан на максимальный пусковой момент (рисунок 4-9).
Рисунок 4-9: Конденсаторный пусковой двигатель
Пусковая обмотка отключается от цепи центробежным переключателем или электронным реле, когда двигатель достигает рабочей скорости. Пусковой крутящий момент выше, чем у конденсаторных двигателей, а рабочие характеристики аналогичны двигателям с расщепленной фазой.
Конденсаторный пуск — Конденсаторные двигатели
В этой конструкции используется конденсатор, оптимизированный для работы в последовательном соединении с основной обмоткой статора (Рисунок 4-10).Второй конденсатор, включенный последовательно с пусковой обмоткой, оптимизирует пусковой момент. Пусковой конденсатор выключается из цепи на ходовой скорости.
Иногда выходит из строя конденсатор и двигатель не запускается. Простым тестом является снятие конденсатора и проверка с помощью омметра (поз. 2). Если возможно, установите наивысшую шкалу Ом. При контакте с клеммами значение сопротивления должно быстро падать, а затем замедляться и снова возрастать. Это означает, что конденсатор должен быть в рабочем состоянии. Однако, если сопротивление сразу упадет до низкого значения, близкого к нулю, конденсатор закорочен.Если значение остается очень высоким, конденсатор разомкнут. Установка нового конденсатора такой же мощности должна решить проблему.
Рисунок 4-10: Конденсаторный пуск — конденсаторный двигатель
Оптимизирован пусковой момент и рабочие характеристики.
г. Двигатели с экранированными полюсами
Электродвигатель с экранированными полюсами — это простейшая форма однофазного электродвигателя с очень низкой стоимостью (рис. 4-11).
Он создает вращающееся поле, задерживая нарастание магнитного потока через часть конструкции полюса.
Рисунок 4-11: Двигатель с экранированными полюсами
Затененная часть полюса изолирована от остальной части полюса медным проводником, который образует один виток вокруг него.
Магнитный поток в незатененной части увеличивается с током, протекающим через ее обмотку. Магнитный поток увеличивается в заштрихованной части; однако он задерживается током, индуцированным в медном поле.
Магнитное поле перемещается по полюсной поверхности от незатененной части к затемненной, создавая крутящий момент в короткозамкнутой клетке.
Для увеличения крутящего момента ротор выполнен с относительно высоким сопротивлением.
Двигатели с экранированными полюсами используются там, где допустим низкий крутящий момент (например, вентиляторы) и обычно менее 1/4 л.с.
Из-за очень низкого КПД двигатели с экранированными полюсами следует использовать только в тех случаях, когда двигатель очень мал или работает в течение очень коротких периодов времени (например, двигатель вентилятора душа).
ч. Синхронные двигатели
Синхронный двигатель создает магнитные полюса в фиксированных положениях на роторе.
Эти полюса фиксируются на вращающемся поле статора и вращают ротор с синхронной скоростью, основанной на частоте питания 60 Гц.
Простой способ определить скорость синхронного двигателя — разделить 3600 на половину числа полюсов. Например, двухполюсная машина будет вращаться со скоростью 3600 об / мин, четырехполюсная — 1800 об / мин, 6-полюсная — 1200 об / мин и т. Д.
Существует несколько типов одно- и трехфазных синхронных двигателей.
Синхронные двигатели значительно дороже асинхронных двигателей.Их использование обычно ограничивается приложениями, в которых абсолютно необходима равномерная скорость, и скольжение двигателя недопустимо (см. Раздел 4 а).
Синхронный двигатель с возбужденным ротором
Магнитные полюса на роторе представляют собой электромагниты, на которые подается постоянный ток либо через контактные кольца от стационарного внешнего источника постоянного тока, либо изнутри от генератора переменного тока, установленного на валу ротора (бесщеточный тип) (Рисунок 4-12).
Рисунок 4-12: Возбудитель для бесщеточного синхронного двигателя
Величину возбуждения можно регулировать, изменяя ток ротора на щеточном двигателе или возбуждение поля генератора переменного тока на бесщеточном двигателе.
Изменение уровня возбуждения ротора изменяет коэффициент мощности двигателя.
Двигатель может работать с запаздывающим коэффициентом мощности (недовозбуждение) или опережающим коэффициентом мощности (перевозбуждение).
Синхронный двигатель с перевозбуждением может использоваться для корректировки низкого коэффициента мощности на установке и может быть отрегулирован по мере необходимости. Такую установку иногда называют «синхронным конденсатором».
Невозбужденный или синхронный двигатель с ротором сопротивления
В этой конструкции используется железный ротор, форма которого обеспечивает фиксированные пути для магнитного потока (рисунок 4-13).Обычно они варьируются от долей лошадиных сил до примерно 30 л.с.
Рисунок 4-13: Невозбужденный ротор синхронного двигателя
Постоянные магниты иногда используются на роторах небольших двигателей.
Двигатели с ротором с реактивным ротором имеют низкий коэффициент мощности во время работы. Они также физически больше, чем двигатели возбужденного типа аналогичной мощности.
Однофазные синхронные двигатели
Для создания синхронного двигателя реактивного типа можно использовать любую конфигурацию однофазного статора (рисунок 4-14).
Ротор по сути представляет собой беличью клетку, некоторые стержни которой удалены в положениях, благоприятствующих определенным траекториям магнитного потока.
Во время пуска ротор отстает от вращающегося магнитного поля, как у асинхронного двигателя.
Когда двигатель приближается к синхронной скорости, реактивный крутящий момент заставляет ротор синхронизироваться с полем статора.
Эта конструкция используется в приложениях с низким энергопотреблением, где требуется синхронная скорость.
Рисунок 4-14: Однофазный резистивный двигатель
и.Мотор Hysterisis
Для двигателя с гистерезисом ротор обычно представляет собой цилиндр из магнитотвердой стали без каких-либо обмоток или зубцов (Рисунок 4-15).
Обмотки статора обычно представляют собой разделенные конденсаторы, при этом конденсатор выбирается таким образом, чтобы максимально приблизить работу двух фаз.
Рисунок 4-15: Двигатель Hysterisis
Высокая удерживающая способность материала ротора заставляет его магнитную ориентацию отставать от вращающегося магнитного поля на долю оборота.
Взаимодействие между вращающимся полем и магнитной полярностью ротора вызывает на ротор крутящий момент, который является постоянным от состояния покоя до синхронной скорости.
Эта конструкция позволяет синхронизировать высокоинерционные нагрузки.
Работа в целом плавная и тихая благодаря гладкой периферии ротора.
ДвигателиHysterisis обычно используются в приложениях с низким энергопотреблением, таких как часы.
Дж. Универсал Моторс
Универсальные двигателиимеют последовательную обмотку и имеют схему ротора, аналогичную двигателям постоянного тока (Рисунок 4-16).
Термин «универсальный» объясняется их способностью работать от источника питания постоянного тока, или переменного тока, .
Работа и конструкция этих двигателей очень похожи на двигатели постоянного тока, с компонентами, рассчитанными на КПД на переменном токе вплоть до частоты сети (см. Раздел 5 b).
Рабочие скорости обычно находятся в диапазоне от 3000 до 15000 об / мин. Скорость будет падать с увеличением нагрузки.
Для этой конструкции характерно высокое соотношение мощности и габаритов.
Требования к техническому обслуживанию за час работы выше, чем у других конструкций из-за установки щеток / коммутатора.
На двигателях с доступными щетками (обычно резьбовые заглушки с прорезями для монет с обеих сторон двигателя) необходимо время от времени проверять состояние щеток, чтобы убедиться, что остается достаточное количество материала щетки. Когда щетка приближается к держателю или оплетке на конце, ее следует заменить щеткой того же размера и типа. Если щетка закончится и держатель коснется коллектора, при работе двигателя будет много искр.В этом случае немедленно остановите двигатель. Могло быть нанесено необратимое повреждение, но новые щетки могут исправить ситуацию.
Обычно эти двигатели используются в приложениях с низким рабочим циклом, таких как электрические пилы, дрели, пылесосы и газонокосилки. Обычны размеры до 2 л.с.
Рисунок 4-16: Универсальный двигатель
Предыдущая: Принципы работы | Содержание | Далее: DC Motors
Обзор методов снижения веса и повышения эффективности электродвигателей с использованием легких материалов, новых производственных процессов, магнитных материалов и методов охлаждения
Двигатель— первый в мире.Доступно на сайте:
https://all3dp.com/3d-printed-electric-motor/, по состоянию на
6 октября 2019 г.
[55] Картик, Д.Э., Мрудунаяни, П., Бабу, С.В.В.К. (2019).
Влияние магнитной воды на самоуплотняющийся бетон
с использованием сульфатостойкого цемента Влияние магнитной воды
на самоуплотняющийся бетон с использованием сульфатостойкого цемента
. Annales de Chimie — Science des
Matériaux, 43 (5): 347-352.
https://doi.org/10.18280/acsm.430511
[56] Алам, М.Ф., Бора, М., Шарма, Б., Барман, Р.Н. (2019).
Численное исследование магнитогидродинамики
смешанная конвекция в квадратной полости для различных форм
проводящих препятствий, помещенных в центр числовое
исследование магнитогидродинамики смешанная
конвекция в квадратной полости для различных форм
проводящих препятствий размещен в центре.Математическое
Моделирование инженерных задач, 6 (4): 550-556.
https://doi.org/10.18280/mmep.060410
[57] Апреа К., Греко А., Майорино А., Масселли К. (2017).
Сравнение электрокалорических и магнитокалорических материалов
для твердотельного охлаждения.
International Journal of Heat and Technology, 35 (1):
225-234. https://doi.org/10.18280/ijht.350130
[58] Апреа К., Греко, А., Майорино, А., Масселли, К. (2017).
Анализ энергетических характеристик регенератора AMR
, работающего с различными магнитокалорическими материалами
: Исследования и точки зрения. Международный
Журнал тепла и технологий, 35: S383-S390.
https://doi.org/10.18280/ijht.35Sp0152
[59] Греко, А., Апреа, К., Майорино, А., Масселли, К. (2019).
Об использовании наножидкостей в качестве вторичной жидкости для
теплообмена в магнитокалорическом охладителе.Tecnica —
Italiana Итальянский журнал инженерных наук, 63 (1):
52-58. https://doi.org/10.18280/ti-ijes.630107
[60] Гуо, Ю.Г., Чжу, Дж. (2006). Применение мягких магнитных композиционных материалов
в электрических машинах: обзор
. Австралийский Jl. электротехники и электроники
Engineering, AJEEE.
https://doi.org/10.1080/1448837X.2006. 11464143
[61] Кордеки, А., Венглински, Б.(1990). Разработка и
приложений магнитомягких ПМ материалов. Порошок
Металлургия, ПМ, Тейлор и Фрэнсис, 33 (2): 151-155.
https://doi.org/10.1179/pom.1990.33.2.151
[62] Янссон, П. (1992). Магнитомягкие материалы для приложений AC
. Порошковая металлургия, 35 (1): 63-66.
[63] Hamler, A., Gorican, V., Sustarsic, B., Sirc, A. (2006).
Использование магнитомягких композитных материалов в синхронном электродвигателе
.Журнал магнетизма и
магнитных материалов, 304 (2): e816-e819.
https://doi.org/10.1016/j.jmmm.2006.03.003
[64] Видмер, Дж. Д., Мартин, Р., Кимиабейги, М. (2015).
Тяговые двигатели электромобилей без редкоземельных элементов
магнитов. Устойчивые материалы и технологии,
JSusmat, 3: 7-13.
https://doi.org/10.1016/j.susmat.2015.02.001
[65] Де Дженнаро, М., Юргенс, Дж., Занон, А.(2019).
Проектирование, создание прототипа и испытания ферритовой машины с постоянным магнитным сопротивлением
для создания гибридных и электрических транспортных средств
. Устойчивое развитие
Энергетические технологии и оценка, SETA.
https://doi.org/10.1016/j.seta.2018. 12.002
[66] Миками, Х., Идэ, К., Симидзу, Ю., Сено, М., Секи, Х.
(2011). Историческая эволюция технологии двигателей, Hitachi
Обзор.
[67] Феррарис, Л., Пошкович, Э., Франкини, Ф. (2016). Новые мягкие магнитные композиты
для электромагнитного применения
с улучшенными механическими свойствами. AIP продвигается.
https://doi.org/10.1063/1.4943413
[68] Феррарис, Л., Франкини, Ф., Поскович, Э. (2016). Гибридные
магнитные композитные материалы (HMC) для сенсоров
приложений. 2016 IEEE Sensors Applications
Симпозиум (SAS), Катания, Италия.
https://doi.org/10.1109/SAS.2016.7479833
[69] Син, К., Миллер М., Чжоу, Л., Диллон, Х. (2013). Фаза
,и распределения элементов в альнико-магнитных материалах.
IEEE Tran. по магнетике, 49 (7): 3314-3317.
https://doi.org/10.1109/TMAG.2013.2252155
[70] Феррарис, Л., Поскович, Э., Франкини, Ф. (2018). Исследование
составов гибридных магнитных композитов (HMC)
материалов для сенсорных приложений.20-я Европейская конференция по силовой электронике и приложениям
, EPE
2018 ECCE Europe.
[71] Пошкович, Э., Феррарис, Л., Франкини, Ф., Гранде, М.
(2019). Влияние размера частиц на потери в сердечнике
магнитомягких композитов. AIP Advances, 9 (3).
https://doi.org/10.1063/1.5080079
[72] Мягкие магнитные композиты — обеспечивают более эффективные электромагнитные конструкции
. Доступно онлайн:
https: // www.hoganas.com/en/powder-technologies/soft-
magnet-composites /, по состоянию на 19 октября 2019 г.
[73] Wang, J.Q., Wang, F.X. (2011). Термический анализ и испытание
для высокоскоростного двигателя с постоянными магнитами для вентилятора.
Advanced Materials Research, AMR, 383: 4727-4734.
Доступно в Интернете: https://www.scientific.net/AMR.383-
390.4727, по состоянию на 22 октября 2019 г.
[74] Санандрес, У., Альмандос, Г., Поза, Дж., Улгаиде , ГРАММ.
(2014). Проектирование систем охлаждения с использованием вычислительных
гидродинамических и аналитических тепловых моделей. IEEE
Транзакции по промышленной электронике, TIE.
https://doi.org/10.1109/TIE.2013.2286081
[75] Slemon, G.R. (1993). О конструкции высокопроизводительных электродвигателей с постоянным магнитом для открытого монтажа
. IEEE Transactions on
Industry Applications, TIA.
https://doi.org/10.1109/28.273631
[76] Нерг, Дж., Рилла, М., Пирхёнен, Дж. (2008). Термический анализ
электрических машин с радиальным потоком большой мощности
плотности. IEEE Transactions on Industrial Electronics,
TIE. https://doi.org/10.1109/TIE.2008.927403
[77] Zhang, F., Hao, Y., Liu, G., Qiu, F. (2016), Design and
analysis of 100kW high speed постоянный магнит
синхронный двигатель. IEEE Transportation Electrification
Conference and Expo, Asia-Pacific (ITEC Asia-Pacific),
стр.843-847. https://doi.org/10.1109/ITEC-
AP.2016.7513066
[78] Хруска, К., Кинди, В., Комрска, Т., Печенек, Р., Штрайт,
Л. (2016 г. ). Концепция и конструкция синхронного двигателя с постоянными магнитами
специального назначения. ELEKTRO 2016
— 11-я Международная конференция, Труды, стр. 156-161.
https://doi.org/10.1109/ELEKTRO.2016.7512056
[79] Tosetti, M., Maggiore, P., Cavagnino, A., Vaschetto, S.
(2014).Сопряженный анализ теплопередачи интегрированных бесщеточных генераторов
для большего количества электродвигателей. IEEE
Транзакции в отраслевых приложениях, TIA.
https://doi.org/10.1109/TIA.2013.2296657
[80] Натех, С., Уоллмарк, О., Лекселл, М., Чжао, С. (2012).
Термический анализ PMaSRM с использованием частичного FEA и моделирования
сосредоточенных параметров.