Чем отличается синхронный двигатель от асинхронного
На сегодняшний день асинхронные электродвигатели более распространены, однако они не универсальны. В некоторых ситуациях их использование нельзя считать эффективным решением производственных задач. В таких ситуациях промышленное применение синхронных двигателей считается более оправданным. В чем же разница между синхронными и асинхронными двигателями?
Под электродвигателем в целом понимается электрическая машина, преобразующая электрическую энергию в механическую при помощи ротора. Такое устройство применяется в различных промышленных механизмах.
Ключевое отличие синхронного и асинхронного двигателей заключается в принципе работы. Синхронный двигатель состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается постоянный ток. Таким образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле только уже посредством подачи переменного тока.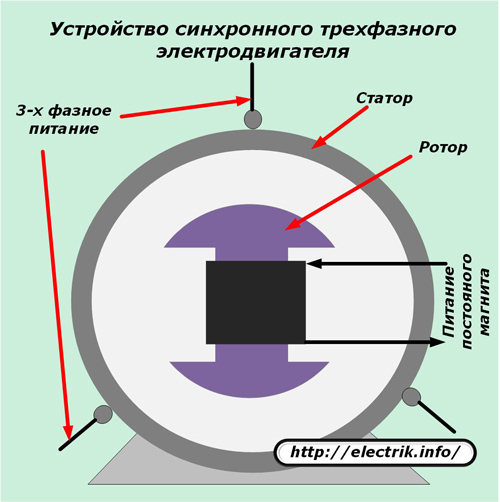
Асинхронный электродвигатель работает по иному принципу. На роторе такого механизма обмотка отсутствует. Вместо нее находятся соединенные стержни. Ротор такого плана называется «беличья клетка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под влиянием механической нагрузки частота вращения рамки меньше частоты вращения магнита, то есть частоты не синхронны.
Следует учитывать, что отличить синхронный двигатель от асинхронного по внешним признакам невозможно. Статоры этих механизмов устроены одинаково. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное весомое отличие асинхронного и синхронного двигателей – устройство ротора.
Выбирая между синхронным и асинхронным электродвигателем необходимо отталкиваться от производственных задач. В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.
В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.
Важное отличие синхронных двигателей – дороговизна. Производство таких механизмов имеет более высокую стоимость, поэтому приобретение и дальнейшее обслуживание также потребует больших вложений.
Выводы:
- Асинхронный и синхронный двигатели отличаются принципом работы.
- В синхронном двигателе частота вращения ротора соответствует частоте подаче тока.
-
Синхронный двигатель может поддерживать номинальные обороты при любой нагрузке, асинхронный – нет.

- Асинхронные двигатели в промышленности распространены гораздо больше, чем синхронные.
- Синхронные двигатели дороже, чем асинхронные.
Серводвигатели – синхронные и асинхронные
Для динамичных и точных сервоприводных систем у нас тоже есть модульная система двигателей. Выберите из трех синхронных и одной асинхронной серий свой оптимальный серводвигатель: компактный, малоинерционный и мощный. Множество типоразмеров и вариантов конструктивной длины обеспечивают широкую сферу применения и надежный пусковой момент.
Что такое серводвигатели?
Серводвигатель – это двигатель, который позволяет контролировать точное положение вала двигателя, а также частоту вращения и/или ускорение. Для этого применяются соответствующие датчики и способы автоматического регулирования. Раньше серводвигатели были вспомогательными приводами, которые конструировались для применения в станках. Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Впрочем, своим названием серводвигатель обязан латинскому слову „servus“, что по-русски означает „слуга“. В качестве серводвигателей может использоваться асинхронный двигатель, синхронный двигатель или двигатель постоянного тока. То есть различие между этими двигателями заключается не в самом принципе привода, а только в их возможностях регулирования.
Какие серводвигатели существуют?
Наше предложение: Синхронные и асинхронные серводвигатели
Асинхронные серводвигатели
Асинхронные серводвигатели подходят для применения в таких системах, где большие внешние моменты инерции нужно перемещать в установках и машинах, обеспечивая высокую надежность регулирования.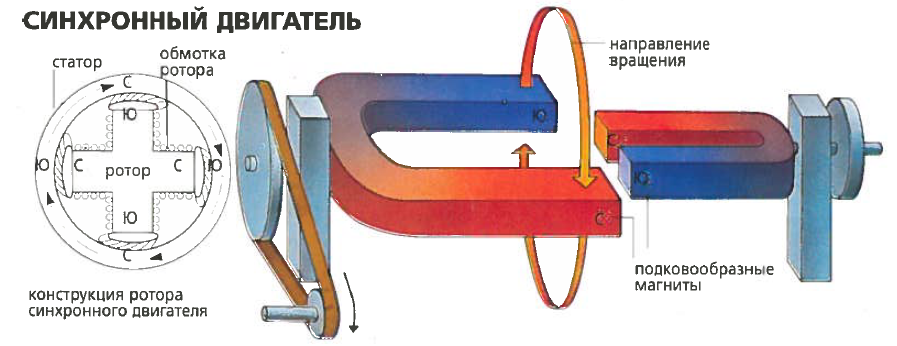 Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Для этого SEW-EURODRIVE предлагает в серии двигателей DRL.. соответствующие решения для привода.
Синхронные серводвигатели
Синхронные серводвигатели – это приводы, в которых ротор с помощью закрепленных на нем постоянных магнитов синхронно приводится в движение вращающимся полем в статоре. Синхронный двигатель вращается синхронно подаваемой частоте вращающегося поля.
Этот вариант привода работает от преобразователя частоты, который обеспечивает подходящий, управляемый трехфазный ток. Для этого в ассортименте SEW-EURODRIVE есть различные исполнения. Оптимизированные серводвигатели серии CMP.. можно в зависимости от применения адаптировать к высокой динамике или высоким нагрузкам. Классические сферы применения – пищевая промышленность, строительство, автомобилестроение, упаковочная техника и деревообработка.
Основной особенностью синхронных серводвигателей серии CM..являются оптимальные характеристики регулирования, высокий вращающий момент и динамика. Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.
Эти двигатели идеально подходят для применения в логистике, например в качестве приводов портальных подъемников или стеллажных кранов-штабелеров.
Продукция | ABB (АББ) | Электродвигатели
АББ — лидер в области технологий для электроэнергетики и автоматизации. Технологии, созданные Группой, позволяют промышленным предприятиям и энергетическим компаниям повышать свою производительность, снижая негативное воздействие на окружающую среду. АББ поставляет на Российский рынок всю низковольтную электротехнику — от предохранителей до комплектных распределительных устройств, от стандартных электродвигателей до регулируемых приводов.
Современное оборудование производится на заводах АББ в Германии, Швеции, Финляндии, Франции, Италии, Испании и других странах Европы по самым передовым технологиям.
Номенклатура поставляемой электротехнической продукции содержит десятки тысяч наименований и постоянно расширяется и обновляется. АББ — одна из крупнейших в мире технологических компаний, офисы и производство АББ находятся более чем в 100 странах мира.
Двигатели АББ общего назначения, рассчитанные на стандартное использование по прямому назначению, соответствуют большинству технических требований заказчика. Двигатели общего назначения изготавливаются в соответствии с наивысшими производственными стандартами и используют самые лучшие материалы из всех стран мира. Это обеспечивает электродвигателям высокое качество и надежность, позволяя им работать более 30 лет. Электродвигатели, обладая конкурентными ценами, соответствуют классу энергетической эффективности EFF2 и, как вариант, классу EFF1.
Двигатели компании АББ с повышенным КПД пригодны для самых ответственных применений в целлюлознобумажной промышленности, системах очистки воды, пищевой промышленности, металлообработке и производстве строительных материалов. На такие двигатели, к которым предъявляются повышенные требования при проектировании и которые используются совместно с технологическим оборудованием указанных отраслей, корпорация АВВ дает высокую гарантию.
Электродвигатели с повышенным КПД изготовлены в соответствии с наивысшими производственными стандартами и используют самые лучшие материалы из всех стран мира. Это обеспечивает им высокое качество и надежность, позволяя электродвигателям работать более 30 лет. Электродвигатели, имеющие умеренные цены, соответствуют классу энергетической эффективности EFF1.
Это обеспечивает им высокое качество и надежность, позволяя электродвигателям работать более 30 лет. Электродвигатели, имеющие умеренные цены, соответствуют классу энергетической эффективности EFF1.
В многообразие двигателей производства компании АББ входит:
- Высоковольтные двигатели АББ
- Асинхронные
- Асинхронные модульные
- Асинхронные чугунные
- Асинхронные взрывозащищенные
- C фазным ротором
- Синхронные AMS
- Синхронные AMZ
- Низковольтные асинхронные двигатели АББ
- Двигатели общего назначения
- Взрывозащищенные
- Для высокой температуры
- Повышенной эффективности
- Серводвигатели
Для чего нужен электродвигатель и чем они отличаются
Что из себя представляет электродвигатель
Говоря техническим языком, электродвигатель является элементом, который преобразует электричество в механическую энергию, что приводит в движение весь механизм. Поэтому двигатель и называют главным составляющим. Давайте же разберемся подробнее, для чего нужен электродвигатель, из чего он состоит и как работает.Первые модели были произведены еще в 19 ст. Но перед этим была четко сформулирована цель – получить механическую энергию для передвижения и других действий с помощью электричества.
Поэтому двигатель и называют главным составляющим. Давайте же разберемся подробнее, для чего нужен электродвигатель, из чего он состоит и как работает.Первые модели были произведены еще в 19 ст. Но перед этим была четко сформулирована цель – получить механическую энергию для передвижения и других действий с помощью электричества.
Разберемся, из чего состоит электродвигатель. Главными элементами считаются статор – неподвижная часть (корпус) и ротор – подвижная часть механизма. Помимо этого, в состав двигателя входят еще десятки мелких деталей, таких как подшипники, обмотка из медной проволоки и так далее. На этой странице можно посмотреть все электрические характеристики электродвигателей.
Теперь давайте рассмотрим виды электрических двигателей. В основном они классифицируются по типу питания – это двигатели постоянного тока и переменного, и по принципу работы – синхронные и асинхронные. Двигатели постоянного тока так называются, так как работают от различных блоков питания, аккумуляторов и прочих батарей. Переменного, потому что соединяются напрямую с электрической сетью.
Переменного, потому что соединяются напрямую с электрической сетью.
Синхронные механизмы имеют обмотки на роторе и подают на них напряжение для работы двигателя. Асинхронные – не имеют данных компонентов. Поэтому скорость вращения будет заметно медленнее, так отсутствует магнитное поле, созданного в статоре.
Как работает и что делает электродвигательКогда механизм соединяется с источником питания, на обмотке возникает магнитное поле, которое и вращает ротор в статоре. Это происходит по закону Ампера. Ведь создается отталкивающая сила, способная вращать вал и приводить в движение другие детали. Частота оборотов ротора напрямую зависит от частоты приходящего на витки электричества, а также от количества пар магнитных полюсов. Кстати, название данной разновидности пошло от того факта, что скорость вращения ротора различалась с частотой оборотов магнитного поля, то есть эти показатели были асинхронными.
Синхронные же двигатели немного отличаются строением ротора. В таком типе электродвигателей, ротор играет роль магнита, который и создает поле для вращения. Здесь магнитное поле статора и сам ротор вращаются с одинаковой частотой. Но есть один, очень значимый минус. Чтобы запустить синхронный электродвигатель, нужно воспользоваться помощью асинхронного. Ведь после простого подключения механизма к сети, ничего не произойдет.
В таком типе электродвигателей, ротор играет роль магнита, который и создает поле для вращения. Здесь магнитное поле статора и сам ротор вращаются с одинаковой частотой. Но есть один, очень значимый минус. Чтобы запустить синхронный электродвигатель, нужно воспользоваться помощью асинхронного. Ведь после простого подключения механизма к сети, ничего не произойдет.
К этому недостатку можно прибавить низкую скорость оборотов. К примеру, если взять асинхронный и синхронный двигатели и подключить их к источнику электричества одинакового напряжения, то первый тип будет вращаться заметно быстрее второго.
Где используют электродвигателиОни имеют множество неоспоримых преимуществ и особенностей, что делают механизм уникальным и незаменимым. В современном мире данный тип двигателя широко используется практически во всех сферах жизнедеятельности человека. Приобрести электродвигатели можно в каталоге электродвигателей аир.
Применение электрических двигателей начинается от небольших игрушек, и заканчивается большими предприятиями и народными хозяйствами. С помощью этого механизма стало возможно поднимать и передвигать огромные предметы.
Если коротко резюмировать данную статью, то хочется еще раз подчеркнуть значимость таких двигателей в жизни человека. Без них, многие сферы просто не смогли бы нормально функционировать и развиваться. Поэтому нужно тщательно подходить к выбору электродвигателя, ведь его поломка чревата остановкой производства или другого важного процесса, что повлечет за собой материальные и нематериальные убытки. Быстро подобрать необходимый мотор помогут наши специалисты.
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| АИР56В2 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 | |
| АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 2,2 | 0,91 | 4,7 |
| АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,2 | 2,3 | 1,77 | 8,7 |
| АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| АИР71В4 | 0,75 | 1390 | 73,0 | 0,76 | 6,0 | 2,3 | 2,3 | 2,05 | 10 |
| АИР71А6 | 0,37 | 880 | 62,0 | 0,70 | 4,7 | 1,9 | 2,0 | 1,3 | 8,4 |
| АИР71В6 | 0,55 | 880 | 65,0 | 0,72 | 4,7 | 1,9 | 2,1 | 1,8 | 10 |
| АИР71А8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР71В8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| АИР80А2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80А2ЖУ2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| АИР80В2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80В2ЖУ2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| АИР80А4 | 1,1 | 1390 | 76,2 | 0,77 | 6,0 | 2,3 | 2,3 | 2,85 | 14 |
| АИР80В4 | 1,5 | 1400 | 78,5 | 0,78 | 6,0 | 2,3 | 2,3 | 3,72 | 16 |
| АИР80А6 | 0,75 | 905 | 69,0 | 0,72 | 5,3 | 2,0 | 2,1 | 2,3 | 14 |
| АИР80В6 | 1,1 | 905 | 72,0 | 0,73 | 5,5 | 2,0 | 2,1 | 3,2 | 16 |
| АИР80А8 | 0,37 | 675 | 62,0 | 0,61 | 4,0 | 1,8 | 1,9 | 1,49 | 15 |
| АИР80В8 | 0,55 | 680 | 63,0 | 0,61 | 4,0 | 1,8 | 2,0 | 2,17 | 18 |
| АИР90L2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L2ЖУ2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| АИР90L4 | 2,2 | 1410 | 80,0 | 0,81 | 7,0 | 2,3 | 2,3 | 5,1 | 17 |
| АИР90L6 | 1,5 | 920 | 76,0 | 0,75 | 5,5 | 2,0 | 2,1 | 4,0 | 18 |
| АИР90LA8 | 0,75 | 680 | 70,0 | 0,67 | 4,0 | 1,8 | 2,0 | 2,43 | 23 |
| АИР90LB8 | 1,1 | 680 | 72,0 | 0,69 | 5,0 | 1,8 | 2,0 | 3,36 | 28 |
| АИР100S2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100S2ЖУ2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| АИР100L2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100L2ЖУ2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| АИР100S4 | 3,0 | 1410 | 82,6 | 0,82 | 7,0 | 2,3 | 2,3 | 6,8 | 21 |
| АИР100L4 | 4,0 | 1435 | 84,2 | 0,82 | 7,0 | 2,3 | 2,3 | 8,8 | 37 |
| АИР100L6 | 2,2 | 935 | 79,0 | 0,76 | 6,5 | 2,0 | 2,1 | 5,6 | 33,5 |
| АИР100L8 | 1,5 | 690 | 74,0 | 0,70 | 5,0 | 1,8 | 2,0 | 4,4 | 33,5 |
| АИР112M2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М2ЖУ2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| АИР112М4 | 5,5 | 1440 | 85,7 | 0,83 | 7,0 | 2,3 | 2,3 | 11,7 | 45 |
| АИР112MA6 | 3,0 | 960 | 81,0 | 0,73 | 6,5 | 2,1 | 2,1 | 7,4 | 41 |
| АИР112MB6 | 4,0 | 860 | 82,0 | 0,76 | 6,5 | 2,1 | 2,1 | 9,75 | 50 |
| АИР112MA8 | 2,2 | 710 | 79,0 | 0,71 | 6,0 | 1,8 | 2,0 | 6,0 | 46 |
| АИР112MB8 | 3,0 | 710 | 80,0 | 0,73 | 6,0 | 1,8 | 2,0 | 7,8 | 53 |
| АИР132M2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132М2ЖУ2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| АИР132S4 | 7,5 | 1460 | 87,0 | 0,84 | 7,0 | 2,3 | 2,3 | 15,6 | 52 |
| АИР132M4 | 11 | 1450 | 88,4 | 0,84 | 7,0 | 2,2 | 2,3 | 22,5 | 60 |
| АИР132S6 | 5,5 | 960 | 84,0 | 0,77 | 6,5 | 2,1 | 2,1 | 12,9 | 56 |
| АИР132M6 | 7,5 | 970 | 86,0 | 0,77 | 6,5 | 2,0 | 2,1 | 17,2 | 61 |
| АИР132S8 | 4,0 | 720 | 81,0 | 0,73 | 6,0 | 1,9 | 2,0 | 10,3 | 70 |
| АИР132M8 | 5,5 | 720 | 83,0 | 0,74 | 6,0 | 1,9 | 2,0 | 13,6 | 86 |
| АИР160S2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160S2ЖУ2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| АИР160M2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160М2ЖУ2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| АИР160S4 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160S4ЖУ2 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| АИР160M4 | 18,5 | 1470 | 90,0 | 0,86 | 7,5 | 2,2 | 2,3 | 36,3 | 142 |
| АИР160S6 | 11 | 970 | 87,5 | 0,78 | 6,5 | 2,0 | 2,1 | 24,5 | 125 |
| АИР160M6 | 15 | 970 | 89,0 | 0,81 | 7,0 | 2,0 | 2,1 | 31,6 | 155 |
| АИР160S8 | 7,5 | 720 | 85,5 | 0,75 | 6,0 | 1,9 | 2,0 | 17,8 | 125 |
| АИР160M8 | 11 | 730 | 87,5 | 0,75 | 6,5 | 2,0 | 2,0 | 25,5 | 150 |
| АИР180S2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180S2ЖУ2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| АИР180M2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180М2ЖУ2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| АИР180S4 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180S4ЖУ2 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| АИР180M4 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180М4ЖУ2 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| АИР180M6 | 18,5 | 980 | 90,0 | 0,81 | 7,0 | 2,1 | 2,1 | 38,6 | 160 |
| АИР180M8 | 15 | 730 | 88,0 | 0,76 | 6,6 | 2,0 | 2,0 | 34,1 | 172 |
| АИР200M2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200М2ЖУ2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| АИР200L2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200L2ЖУ2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| АИР200M4 | 37 | 1475 | 92,0 | 0,87 | 7,2 | 2,2 | 2,3 | 70,2 | 230 |
| АИР200L4 | 45 | 1475 | 92,5 | 0,87 | 7,2 | 2,2 | 2,3 | 84,9 | 260 |
| АИР200M6 | 22 | 980 | 90,0 | 0,83 | 7,0 | 2,0 | 2,1 | 44,7 | 195 |
| АИР200L6 | 30 | 980 | 91,5 | 0,84 | 7,0 | 2,0 | 2,1 | 59,3 | 225 |
| АИР200M8 | 18,5 | 730 | 90,0 | 0,76 | 6,6 | 1,9 | 2,0 | 41,1 | 210 |
| АИР200L8 | 22 | 730 | 90,5 | 0,78 | 6,6 | 1,9 | 2,0 | 48,9 | 225 |
| АИР225M2 | 55 | 2970 | 93,0 | 0,90 | 7,5 | 2,0 | 2,3 | 100 | 320 |
| АИР225M4 | 55 | 1480 | 93,0 | 0,87 | 7,2 | 2,2 | 2,3 | 103 | 325 |
| АИР225M6 | 37 | 980 | 92,0 | 0,86 | 7,0 | 2,1 | 2,1 | 71,0 | 360 |
| АИР225M8 | 30 | 735 | 91,0 | 0,79 | 6,5 | 1,9 | 2,0 | 63 | 360 |
| АИР250S2 | 75 | 2975 | 93,6 | 0,90 | 7,0 | 2,0 | 2,3 | 135 | 450 |
| АИР250M2 | 90 | 2975 | 93,9 | 0,91 | 7,1 | 2,0 | 2,3 | 160 | 530 |
| АИР250S4 | 75 | 1480 | 93,6 | 0,88 | 6,8 | 2,2 | 2,3 | 138,3 | 450 |
| АИР250M4 | 90 | 1480 | 93,9 | 0,88 | 6,8 | 2,2 | 2,3 | 165,5 | 495 |
| АИР250S6 | 45 | 980 | 92,5 | 0,86 | 7,0 | 2,1 | 2,0 | 86,0 | 465 |
| АИР250M6 | 55 | 980 | 92,8 | 0,86 | 7,0 | 2,1 | 2,0 | 104 | 520 |
| АИР250S8 | 37 | 740 | 91,5 | 0,79 | 6,6 | 1,9 | 2,0 | 78 | 465 |
| АИР250M8 | 45 | 740 | 92,0 | 0,79 | 6,6 | 1,9 | 2,0 | 94 | 520 |
| АИР280S2 | 110 | 2975 | 94,0 | 0,91 | 7,1 | 1,8 | 2,2 | 195 | 650 |
| АИР280M2 | 132 | 2975 | 94,5 | 0,91 | 7,1 | 1,8 | 2,2 | 233 | 700 |
| АИР280S4 | 110 | 1480 | 94,5 | 0,88 | 6,9 | 2,1 | 2,2 | 201 | 650 |
| АИР280M4 | 132 | 1480 | 94,8 | 0,88 | 6,9 | 2,1 | 2,2 | 240 | 700 |
| АИР280S6 | 75 | 985 | 93,5 | 0,86 | 6,7 | 2,0 | 2,0 | 142 | 690 |
| АИР280M6 | 90 | 985 | 93,8 | 0,86 | 6,7 | 2,0 | 2,0 | 169 | 800 |
| АИР280S8 | 55 | 740 | 92,8 | 0,81 | 6,6 | 1,8 | 2,0 | 111 | 690 |
| АИР280M8 | 75 | 740 | 93,5 | 0,81 | 6,2 | 1,8 | 2,0 | 150 | 800 |
| АИР315S2 | 160 | 2975 | 94,6 | 0,92 | 7,1 | 1,8 | 2,2 | 279 | 1170 |
| АИР315M2 | 200 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315МВ2 | 250 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| АИР315S4 | 160 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 288 | 1000 |
| АИР315M4 | 200 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 360 | 1200 |
| АИР315S6 | 110 | 985 | 94,0 | 0,86 | 6,7 | 2,0 | 2,0 | 207 | 880 |
| АИР315М(А)6 | 132 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 245 | 1050 |
| АИР315MВ6 | 160 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 300 | 1200 |
| АИР315S8 | 90 | 740 | 93,8 | 0,82 | 6,4 | 1,8 | 2,0 | 178 | 880 |
| АИР315М(А)8 | 110 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 217 | 1050 |
| АИР315MВ8 | 132 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 260 | 1200 |
| АИР355S2 | 250 | 2980 | 95,5 | 0,92 | 6,5 | 1.6 | 2,3 | 432,3 | 1700 |
| АИР355M2 | 315 | 2980 | 95,6 | 0,92 | 7,1 | 1,6 | 2,2 | 544 | 1790 |
| АИР355S4 | 250 | 1490 | 95,6 | 0,90 | 6,2 | 1,9 | 2,9 | 441 | 1700 |
| АИР355M4 | 315 | 1480 | 95,6 | 0,90 | 6,9 | 2,1 | 2,2 | 556 | 1860 |
| АИР355MА6 | 200 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 292 | 1550 |
| АИР355S6 | 160 | 990 | 95,1 | 0,88 | 6,3 | 1,6 | 2,8 | 291 | 1550 |
| АИР355МВ6 | 250 | 990 | 94,9 | 0,88 | 6,7 | 1,9 | 2,0 | 454,8 | 1934 |
| АИР355L6 | 315 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 457 | 1700 |
| АИР355S8 | 132 | 740 | 94,3 | 0,82 | 6,4 | 1,9 | 2,7 | 259,4 | 1800 |
| АИР355MА8 | 160 | 740 | 93,7 | 0,82 | 6,4 | 1,8 | 2,0 | 261 | 2000 |
| АИР355MВ8 | 200 | 740 | 94,2 | 0,82 | 6,4 | 1,8 | 2,0 | 315 | 2150 |
| АИР355L8 | 132 | 740 | 94,5 | 0,82 | 6,4 | 1,8 | 2,0 | 387 | 2250 |
СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ — это… Что такое СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ?
- СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ
синхронная электрическая машина, работающая в режиме двигателя. По сравнению с асинхр. двигателем обладает более высокими мощности коэффициентом и перегрузочной способностью. Однако из-за необходимости возбуждения пост. током от возбудителя или от выпрямителей, а также из-за особенностей пуска (разгон до номин. угловой скорости) часто не может конкурировать с асинхр. двигателем. С. э. применяют в пром. установках, системах автоматики, звукозаписывающей аппаратуре, киноаппаратуре, бытовых приборах и др., требующих пост. угловой скорости. Мощность — от долей Вт до неск. десятков МВт.
Большой энциклопедический политехнический словарь. 2004.
- СИНХРОННЫЙ КОМПЕНСАТОР
- СИНХРОТРОН
Смотреть что такое «СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ» в других словарях:
СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ — синхронная машина, работающая в режиме двигателя. Применяется в электроприводах, не требующих регулирования частоты вращения вала двигателя (напр., в насосах) … Большой Энциклопедический словарь
синхронный электродвигатель — синхронная электрическая машина, работающая в режиме двигателя. Применяется в электроприводах, не требующих регулирования частоты вращения вала двигателя (например, в насосах). * * * СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ,… … Энциклопедический словарь
Синхронный электродвигатель — Синхронная машина, работающая в режиме двигателя. Статор С. э. несёт на себе многофазную (чаще всего трёхфазную) якорную обмотку. На Роторе расположена обмотка возбуждения, имеющая такое же число полюсов, как и обмотка статора. Обмотка… … Большая советская энциклопедия
Синхронный электродвигатель — … Википедия
бесщеточный синхронный электродвигатель с постоянным магнитом — [Интент] Бесщеточные синхронные электродвигатели с постоянным магнитом (PMSM) имеют несколько названий: бесщеточный электродигатель постоянного тока, бесщеточный PMAC электродвигатель, а также электродвигатель с электронным управлением (ECM).… … Справочник технического переводчика
Электродвигатель переменного тока — Электродвигатели разной мощности (750 Вт, 25 Вт, к CD плееру, к игрушке, к дисководу) Электрический двигатель это, электрическая машина, в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.… … Википедия
синхронный — ая, ое; о/нен, о/нна 1) книжн. Совпадающий во времени, происходящий в одно и то же время с чем л. Синхронные движения танцевальной пары. Синхронный перевод. Синонимы: одновре/ме/нный 2) Основанный на применении принципа синхронизма,… … Популярный словарь русского языка
СИНХРОННЫЙ — [Словарь иностранных слов русского языка
Компенсатор синхронный — синхронный электродвигатель, работающий без активной нагрузки, предназначенный для улучшения коэффициента мощности (cosφ) и регулирования напряжения в линиях электропередачи и в электрических сетях (см. Компенсирующие устройства). В… … Большая советская энциклопедия
Гистерезисный электродвигатель — Синхронный электродвигатель, у которого вращающий момент возникает за счёт гистерезиса при перемагничивании массивного ротора с сердечником из магнитного материала, имеющего широкую петлю гистерезиса. При мощностях до 100 вт и частоте 400 … Большая советская энциклопедия
Отличия асинхронных двигателей от синхронных
Применение электродвигателей в различных отраслях промышленности и быта широко распространено, в связи с экономичностью и простотой подключения и обслуживания. Для различных механизмов, применяются двигатели разной мощности и устройства. В этой статье рассмотрим, чем отличается синхронный двигатель от асинхронного, в каких механизмах они применяются и как правильно выбрать тип электрического мотора.
Асинхронные двигатели
Как и любые электрические двигатели, асинхронные моторы представляют собой устройства, которые создают крутящий момент при помощи преобразования электрического тока. Если говорить простыми словами, асинхронный двигатель – это электромотор с неравнозначной частотой вращения ротора и магнитного поля. Магнитное поле ротора в таких устройствах всегда вращается с меньшей частотой, чем поле статора.
Строение асинхронного двигателя в целом аналогично с синхронным. Он состоит из:
- Цилиндрического статора из металлических пластин с пазами для обмотки;
- Фазного либо короткозамкнутого ротора;
- Подвижных и неподвижных деталей корпуса, таких как вал, подшипники, вентилятор охлаждения, электрического оборудования.
Используется тип двигателя асинхронный в различных приводах как в промышленности, так и быту. Например, для обеспечения работы конвейеров, подъемных механизмов кранов и экскаваторов, деревообрабатывающих станков и других механизмов, как крупногабаритных, так и небольших бытовых.
Обслуживание и ремонт такого типа электромоторов не требует больших затрат, однако, для трансформации крутящего момента и понижения частоты вращения необходимо использовать редуктора различной сложности, часто с большим передаточным числом.
Синхронные двигатели
Основное отличие синхронного двигателя от асинхронного в том, что частота вращения магнитных полей при его работе совпадает, то есть является синхронной. Для синхронизации частот вращения используется дополнительный источник постоянного питания, что делает конструкцию синхронного электродвигателя сложнее и частично ограничивает сферу применения такого вида машин. Кроме того, работа такого типа двигателя возможна только с использованием частотного преобразователя.
В сфере применения, электродвигатели синхронные – это промышленные моторы большой мощности, которые используются в различных промышленных устройствах и оборудовании, где необходима повышенная мощность и возникают перегрузки.
Важной особенностью такого типа электромоторов является то, что при работе с перегрузкой устройство отдает часть реактивной мощности в сеть, что способствует повышению мощности, компенсирует падение мощности.
Синхронные двигатели бывают также таких типов:
- Гистерезисные двигатели используются в точных механизмах для создания вращения. Например, в звукозаписи, медицинском оборудовании, машиностроении
- Шаговые электродвигатели применяются в точных приборах и механизмах, таких как, например, станки с числовым программным обеспечением.
Преимущества и недостатки синхронных и асинхронных электродвигателей
Что бы определить, какой двигатель лучше синхронный или асинхронный, необходимо рассмотреть сферу применения этих устройств.
Асинхронные двигатели дешевле в производстве и не требуют дополнительного питания и устройства для запуска, в отличии от синхронных, поэтому, их использование более распространено. Кроме того, подключение и обслуживание таких двигателей также стоит дешевле, как и их производство.
Синхронные двигатели, кроме повышенной мощности, обладают еще одним важным преимуществом – возможностью генерации низкой частоты вращения без использования дополнительных передач в редукторах. При этом, мощность на выходном валу остается неизменной. Синхронный двигатель имеет повышенный коэффициент полезного действия, более полно трансформируя электрическую энергию в крутящий момент.
Однако, синхронные двигатели имеют и недостатки. Кроме того, что требуется дополнительное питание и оборудование запуска, в таком типе электродвигателей происходит быстрый износ подвижных токосъемных деталей, таких как щётки и контактные кольца. Для замены изношенного оборудования требуются средства, что еще более увеличивает стоимость использования синхронных моторов.
Кроме того, настройка и обслуживание синхронных двигателей имеет ряд особенностей и требует более глубоких знаний технических особенностей.
Какой тип двигателя выбрать
При выборе типа электрического двигателя следует учитывать такие факторы:
- Сферу применения и оборудование, которое приводится в движение электродвигателем;
- Стоимость оборудования и его обслуживания;
- Тип преобразующего редуктора, применяемого для понижения скорости вращения;
- Тип питания и электрической сети.
Учитывая эти факторы и принимая во внимание расчет механизма, можно подобрать тип двигателя, который будет обеспечивать бесперебойную работу устройства, максимально экономить электроэнергию и обеспечивать необходимую мощность.
При использовании любого вида электрических двигателей стоит помнить, что срок их службы зависит от соблюдение технического регламента при подключении, настройке и последующему обслуживанию такого оборудования. При нарушении технических требований электродвигатель выйдет из строя, несмотря на его преимущества и надежность.
Синхронные двигатели с постоянными магнитами на роторе: управление (синус и/или трапеция)
Например, термин PMSM (СДПМ) может применяться для обозначения двигателя с постоянными магнитами на роторе, независимо от формы его ЭДС, но так же часто его применяют, подразумевая исключительно синусоидальную форму ЭДС двигателя.
Термин BLDC (БДПТ) может применяться для обозначения двигателя с постоянными магнитами на роторе и трапецеидальной ЭДС, а может вообще обозначать не двигатель, а некий мехатронный узел, включающий в себя:
- двигатель с постоянными магнитами и трапецеидальной ЭДС
- датчик положения ротора
- управляемый по сигналам этого датчика полупроводниковый коммутатор.
Собственно этот мехатронный узел, который может, как и двигатель постоянного тока, управляться постоянным напряжением, и породил сам термин BLDC (БДПТ).
Ещё по отношению к синхронным двигателям с постоянными магнитами на роторе в отечественной литературе, можно встретить название «вентильный двигатель».
Попытки автора разобраться с этим термином быстро зашли в тупик, так как в различных источниках обнаружились явные противоречия.
Например, в книге Г.Б. Онищенко «Электрические двигатели» на стр. 47 «вентильным» называется двигатель соответствующий термину BLDC (БДПТ), что предполагает трапецеидальную ЭДС, и это понимаемо.
Но двигатели типа 5ДВМ сам производитель (ЧЭАЗ) называет «вентильными», хотя при этом утверждает, что они имеют синусоидальную ЭДС.
А вот «Википедия»: «Вентильный двигатель следует отличать от бесколлекторного двигателя постоянного тока (БДПТ), который имеет трапецеидальное распределение магнитного поля в зазоре…».
Ну…приехали…
Какой термин, какой форме ЭДС соответствует – непонятно.
А между тем, именно эта форма определяет выбор структуры системы управления двигателем.
Как человек, занимающийся этим управлением, хочу предложить:
- во избежание путаницы забыть термин «вентильный двигатель»
- термином БДПТ обозначать не двигатель, а исключительно описанный выше мехатронный узел (аналог двигателя постоянного тока)
- делить синхронные двигатели с постоянными магнитами на роторе (СДПМ) по типу ЭДС на две группы:
с синусоидальной ЭДС (далее, для краткости, — СДПМс)
с трапецеидальной ЭДС (далее, для краткости, — СДПМт)
Управление
При управлении двигателями с синусоидальной ЭДС используется векторное регулирование (подробно описано в книжке по ссылке http://3v-services.com/books/978-5-97060-766-4/978-5-97060-766-4_SimInTech-01.pdf). С точки зрения возможностей и качества управления это наилучший вариант.
Однако и двигатели с трапецеидальной ЭДС в силу более простой конструкции статорных обмоток и возможности более простого управления применяются довольно часто.
Конструкция двигателей
Форма ЭДС определяется конструкцией двигателя.
Ротор синхронных двигателей представляет собой магнит с различным количеством пар полюсов.
На Рис 1. показаны возможные конструкции статорных обмоток. Обычно синусоидальной ЭДС соответствует «распределенная» намотка, а трапецеидальной «сосредоточенная».
Рис.1
Статорная обмотка двигателя с трапецеидальной ЭДС проще и технологичнее, за счёт этого цена такого двигателя несколько ниже.
Далее остановимся более подробно на двигателе с трапецеидальной ЭДС (СДПМт)
Двигатель с одной парой полюсов будет выглядеть в разрезе так, как показано на Рис.2.
Рис.2
На статоре СДПМт намотаны три обмотки (А, В, С), сдвинутые в пространстве на 120º. Каждая обмотка состоит из двух секций, включённых встречно. Таким образом, при протекании тока в обмотке она создаёт внутри двигателя два полюса (положительный и отрицательный), к которым и притягивается магнитный ротор. Поочередное изменение токов в обмотках переключает полюса обмоток и заставляет ротор двигаться вслед за полем. На этом и основан принцип работы двигателя.
Уравнения равновесия статорных обмоток двигателя
Уравнения равновесия статорных обмоток двигателя при его включении в «звезду» в неподвижных фазных координатах АВС имеют вид (1).
(1)
Здесь:
— фазные напряжения
— потокосцепления фазных обмоток
— токи фаз
— активное сопротивление фазной обмотки.
Поток в обмотке каждой фазы формируется из следующих составляющих:
- поток, наводимый собственным током фазы
- поток, наводимый магнитными полями других фазных обмоток
- поток, наводимый в обмотке магнитами ротора.
Проиллюстрируем это системой (2):
(2)
Где:
— индуктивность фазных обмоток
— взаимные индуктивности обмоток
— потокосцепления, наводимые в обмотках магнитом ротора.
В общем случае все индуктивности системы (2) могут являться переменными функциями угла поворота поля .
В частном случае для неявнополюсного двигателя (при цилиндрическом роторе) индуктивности и взаимные индуктивности обмоток не зависят от угла.
Обозначив
— индуктивность фазной обмотки,
— взаимная индуктивность двух фазных обмоток,
и подставив выражения (2) в систему (1), получим выражение (3):
(3)
Заметив, что производные по времени от потокосцеплений магнитов ротора
есть не что иное, как наводимая магнитами ротора в этих обмотках ЭДС, систему (3) можно переписать в виде (4).
(4)
Теперь введем понятие единичной функции формы ЭДС.
Единичная функция формы ЭДС — это функция от угла поля (), имеющая единичную амплитуду и повторяющая по форме ЭДС. Для фаз А, В, С обозначим эти функции:
Используя единичные функции формы, мгновенные ЭДС в фазах можно
представить выражением (5):
(5)
Где:
— амплитуда потокосцепления ротора и фазной обмотки
— скорость вращения поля
— скорость вращения ротора
— число пар полюсов двигателя.
Зависимости единичных функций формы ЭДС обмоток СДПМт от угла
поворота поля представлены На Рис.3.
Рис. 3
Вывод формулы для расчёта электромагнитного момента СДПМт
Момент, создаваемый двигателем, является суммой моментов, создаваемых его обмотками.
Посмотрим на уравнение равновесия обмотки фазы А из системы (4).
Умножив обе его части на ток обмотки, получим уравнение для мгновенной электрической мощности обмотки:
Рассмотрим составляющие этой мощности:
— реактивная мощность обмотки
— активная мощность, рассеивающаяся в обмотке
— мощность, создающая электромагнитный момент.
Если пренебречь потерями при переходе электрической мощности в механическую, то можно записать:
,
или:
(6)
Где:
— электромагнитный момент двигателя
— угловая скорость вращения ротора.
Подставив в формулу (6) значения ЭДС из соотношений (5), получим формулу вычисления электромагнитного момента ротора (7).
(7)
Коммутация обмоток СДПМт
В соответствии с формулой (7) момент СДПМт пропорционален сумме произведений фазных токов на функции формы соответствующих ЭДС.
Максимальное значение ЭДС обмотки соответствует плоским участкам трапеции ЭДС. Если бы нам удалось на этих участках угловой траектории сформировать в обмотках токи некоторой постоянной амплитуды, например, совпадающие по знаку со знаком ЭДС, то это позволило бы сформировать при этих токах максимальный постоянный положительный момент.
Для примера рассмотрим на Рис.3 участок угловой траектории от /6 до /2. На этом участке ЭДС в фазе А имеет максимально отрицательное значение, а в фазе В максимально положительное. Следовательно, для получения положительного момента на этом участке угловой траектории надо обеспечить в фазе А отрицательное, а в фазе В положительное значение тока. Для этого фазу А можно подключить на отрицательный, а фазу В на положительный полюса внешнего источника постоянного напряжения (Udc). При этом фаза С не используется (отключена от источника Udc).
Величина тока, протекающего через обмотки, будет в свою очередь определяться прикладываемым к обмоткам напряжением, величиной ЭДС и параметрами обмоток.
Если рассуждать таким образом, то можно составить таблицу коммутаций обмоток, обеспечивающих в зависимости от положения ротора момент нужного знака (Табл. 1).
Табл.1 Алгоритм коммутации
Обмотки трёхфазного двигателя можно коммутировать на внешний источник напряжения с помощью трехфазного мостового инвертора. Для этого состояние инвертора надо поставить в зависимость от положения ротора. Обычно это делается с помощью датчика положения ротора (ДПР). Этот датчик имеет три канала. Каждый канал выдает за один оборот двигателя импульс, соответствующий половине периода вращения, при этом импульсы в каналах сдвинуты на 120º.
Логическая обработка сигналов ДПР позволяет определить в каком из шести секторов в данный момент находится ротор.
Работа ДПР поясняется Табл. 2.
Возможная структура системы управления моментом СДПМт
Алгоритм, описанный в Табл.1, предполагает протекание одного и того же тока в двух фазах двигателя при единичном значении функции формы ЭДС в обмотках фаз. Поэтому выражение (7) можно переписать в виде (8).
(8)
Где:
— значение тока в фазах
То есть значение момента пропорционально величине тока в обмотках двигателя.
Вытекающая из формулы (8) структура системы управления моментом в приводе с СДПМт изображена на Рис.4.
Рис. 4
Данная структура позволяет получить нужный момент, формируя в обмотках двигателя ток необходимой амплитуды, при сохранении алгоритма коммутации (Табл.1).
Эта задача решается с помощью создания на базе трёхфазного мостового инвертора контура тока с ШИМ.
Регулятор тока (ПИ-рег.) формирует сигнал задания напряжения обмоток (U), которое затем реализуется инвертором с ШИМ в соответствии с алгоритмом коммутации (Табл.1).
В качестве сигнала обратной связи в контуре можно использовать трёхфазно-выпрямленные сигналы датчиков тока фаз или сигнал датчика тока в звене постоянного тока инвертора ().
На основе рассмотренного канала управления моментом можно строить внешние контуры управления скоростью и положением.
Однако
Если бы токи в обмотках спадали до нуля и нарастали до нужного уровня мгновенно, то момент двигателя, определяемый их величиной, в установившемся режиме был бы постоянным. В действительности же реальные переходные процессы при коммутации обмоток приводят к пульсациям момента. В зависимости от параметров обмоток, а также соотношения величин текущей ЭДС и напряжения звена постоянного тока эти пульсации могут быть различны по длительности, амплитуде и знаку.
Кроме этих коммутационных пульсаций в рассматриваемой системе также будут иметь место пульсации момента на частоте ШИМ.
Ниже приведен пример работы модели системы регулирования скорости. Данная модель построена в среде SimInTehc на элементах специализированного тулбокса «Электропривод». Среда позволяет получить максимальное приближение моделируемых процессов к реальности с учетом эффектов временной и уровневой дискретизации.
Часть модели, а именно — модель цифровой системы управления скоростью приведена ниже, на Рис.5. Регулятор скорости системы (Рег.W) выдаёт сигнал момента, который отрабатывается структурой построенной в соответствии с Рис.4.
Рис. 5
Для управления был выбран двигатель со следующими параметрами:
Rs=2.875 Ом — сопротивление обмотки фазы
Ls=8.5e-3 Гн – индуктивность фазы
F=0.175 Вб – потокосцепление ротора
Zp=4 — число пар полюсов
Jr=0. 06 кг∙м2 — момент инерции ротора
Напряжение в звене постоянного тока привода было принято равным 100В.
В контуре тока электропривода использовалась ШИМ с частотой 5кГц.
В процессе регулирования происходило ступенчатое увеличение частоты при постоянном моменте сопротивления на валу двигателя (10 Нм).
Графики, полученные в процессе работы модели, приведены на Рис.6.
Рис.6
На графике момента видны существенные пульсации.
Отметим, что в основном они связаны именно с переходными процессами при коммутации обмоток и имеют соответственно частоту ушестерённую по отношению к заданной.
Пульсации, связанные с ШИМ, в данном случае, невелики.
Заметим, что коммутационные пульсации существенно возрастают при увеличении момента, что связано с увеличением тока.
Несколько спасает то, что их влияние на скорость снижает инерция.
А можно ли векторно управлять СДПМт?
Если очень хочется — то можно. Однако и здесь не без особенностей.
Математика и структура стандартной векторной системы управления исходит из синусоидальности поля в зазоре. При трапецеидальной ЭДС это условие нарушается, правда не очень сильно (трапеция это же почти синус).
А результатом этого «почти» будут опять же пульсации момента.
Вид модели цифровой системы векторного управления скоростью в среде SimInTech показан на Рис.7.
Рис.7
Ниже на Рис.8 показан график работы модели уже рассмотренного ранее СДПМт работающего в рассмотренном ранее режиме, но под управлением векторной системы.
В графике момента мы опять наблюдаем пульсации (хотя по сравнению с предыдущим вариантом они несколько уменьшились).
Причины пульсации при векторном управлении и управлении по ДПР различны, но их частота та же – ушестерённая по отношению к заданной.
Заметим, что вследствие несинусоидальности ЭДС токи в обмотках двигателя также будут принципиально несинусоидальными (это действительно так, хотя в масштабе графика на Рис.8 и не слишком заметно).
Рис.8
А можно ли с помощью коммутации обмоток по ДПР управлять двигателем с синусоидальной ЭДС?
С точки зрения автора можно – но не нужно.
Наряду с коммутационными пульсациями момента синусоидальность ЭДС (отсутствие плоской вершины трапеции) в данном случае неминуемо вызовет ещё и дополнительные пульсации, снижающие качество регулирования даже по сравнению с управляемым по ДПР двигателем СДПМт.
А при векторном управлении двигателем с синусоидальной ЭДС пульсаций момента не будет.
Для подтверждения этого тезиса ниже (Рис.9) приведены графики работы модели двигателя с рассмотренными ранее параметрами, но с синусоидальной ЭДС и векторной системой управления скоростью.
Видно, что пульсации момента в этом случае практически отсутствуют. При правильной настройке регуляторов системы они связаны только с ШИМ-преобразованием и для данного случая почти не видны.
Рис.9
Итоги
Для синхронников с страпецеидальной ЭДС — коммутация по ДПР.
Так же возможно использование и более сложного векторного алгоритма регулирования, что может дать снижение уровня пульсации момента.
Для синхронников с синусоидальной ЭДС лучший вариант это векторное регулирование.
Это сочетание идеально для построения точного электропривода (что собственно и так было понятно).
Ю.Н. Калачёв
Список литературы
[1] А. С. Пушкин «Полтава».
Синхронный двигатель— обзор
Коэффициент мощности для переменного тока
Коэффициент мощности — это коэффициент, на который умножается кажущаяся мощность в кВА для получения фактической мощности, кВт, в системе переменного тока. Это отношение синфазной составляющей линейного тока к общему току [39].
В асинхронных двигателях намагничивающая составляющая тока всегда отстает на 90 °. Следовательно, линейный ток отстает при всех нагрузках; величина зависит от нагрузки тока намагничивания.
В синхронных двигателях возбуждение обеспечивается отдельным источником постоянного тока, либо в виде отдельной мотор-генераторной установки (M-G), либо в виде возбудителя, установленного непосредственно на валу двигателя. Ток можно заставить опережать в разной степени, изменяя величину напряженности поля. Коэффициент мощности двигателей может быть отстающим, единичным или опережающим. При использовании переменного тока потребляемая мощность, называемая активной или фактической мощностью , считается энергией, используемой резистивной нагрузкой [40].Синхронный двигатель обеспечивает единицу или опережающий фактор, а асинхронный двигатель обеспечивает единицу или запаздывающий фактор.
Применяя надлежащую величину возбуждения постоянного тока к полюсам возбуждения синхронного двигателя, он работает с единичным коэффициентом мощности. Синхронные двигатели с коэффициентом мощности Unity предназначены для работы именно таким образом. Полная нагрузка, с возбуждением, они не требуют отставания реактивной кВА от линии и не подают опережающую реактивную кВА к линии; они работают с единичным коэффициентом мощности с минимальным током статора и, следовательно, с самым высоким КПД [15].
Обсудите типы двигателей, предлагаемых для технологического завода, с квалифицированным инженером-электриком; такая оценка сочетания синхронных и асинхронных двигателей поможет определить новый коэффициент мощности для установки, потому что чистый коэффициент запаздывания для станций означает, что вся мощность для этой установки будет стоить больше, чем если бы коэффициент был единицей или опережающим. Из Brown and Cadick [40]:
Полная мощность = EI, или ВА, или кВА
Активная мощность = EICosθ, или Вт, или кВт
Примечание: θ = угол векторной диаграммы тока между полной и активной мощностью
Реактивная мощность = EISinθ, или VAR, или kVAR
Расчетный коэффициент мощности:
F p = активная мощность / полная мощность
F p = EICosθ / (EI) = cosθ
F p = W / (ВАр) = (кВт) / (кВАр)
Обратите внимание, что реактивная мощность предъявляет требования к энергосистеме, но не создает никакой полезной работы.
(20-13) Номинальная мощность двигателяVA = (л.с.) (0,746) (Eff) (powerfactor)
Плата за электроэнергию основана на потребляемой мощности в кВАр; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление. См. Полезные обсуждения этого вопроса в Планкенхорне [41], Валода [42] и Лазаре [43]. Плата за электроэнергию зависит от требований VAR; таким образом, чем ниже коэффициент мощности, тем выше плата за потребление.
На большинстве технологических предприятий необходимо соблюдать осторожность, чтобы поддерживать подходящий коэффициент мощности для своей системы, в противном случае может быть наложен штраф на затраты на электроэнергию.Если коэффициент мощности падает ниже некоторого установленного значения, например 0,8, затраты на электроэнергию увеличиваются, потому что фактическая мощность (в виде тока), необходимая для работы (в лошадиных силах), значительно меньше, чем общая мощность, подаваемая в систему установки. Разница в том, что он попадает в поле намагничивания (реактивный ток), что не соответствует реальной работе. Добавляя синхронные двигатели или конденсаторы к системе с полностью индуктивной нагрузкой, вы можете поднять коэффициент мощности с запаздывающего состояния до единицы (или почти до единицы). Синхронные двигатели могут быть спроектированы так, чтобы обеспечивать переменные величины ведущего коэффициента мощности.Это исследование или баланс, который необходимо учитывать при проектировании станции, а рекомендации должны быть подготовлены компетентными инженерами-электриками.
Обычно коэффициент мощности синхронного двигателя равен единице (1,0) или 0,8. Значения опережения 0,7 или 0,6 дадут большую коррекцию опережения для другой запаздывающей системы.
Рисунок 20-13 иллюстрирует работу с коэффициентом мощности для различных типов оборудования.
Рисунок 20-13. Коэффициент мощности различных устройств и то, как синхронные двигатели улучшают коэффициент мощности.
(Используется с разрешения: EM Synchronizer, 200-SYN-42, © 1955. Dresser-Rand Company.)Асинхронный двигатель обычно требует реактивного намагничивания от 0,3 до 0,6 кВА на л.с. или рабочую нагрузку, но опережающую мощность 0,8. Синхронный двигатель с коэффициентом усиления будет обеспечивать мощностью корректирующего намагничивания 0,4–0,6 кВА на л.с. в зависимости от переносимой механической нагрузки. Таким образом, равные подключенные л.с. в асинхронных двигателях и синхронных двигателях с опережающим коэффициентом мощности 0,8 дадут коэффициент мощности системы примерно равный единице [39].
(20–14) реактивная, кВА = (totalalkVA) 2– (кВт) 2
Это всегда запаздывание для асинхронного двигателя. Для синхронного двигателя с коэффициентом мощности (PF) = 1,0 кВА и кВт равны, а для любого коэффициента мощности меньше 1,0, то есть 0,9, 0,8, 0,7 и т. Д., Коэффициент мощности является опережающим. Также см. Ссылки [44–46].
Синхронные двигатели | Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного отсчета времени, таких как хронометраж, (часы) и магнитофоны.Хотя кварцевые часы с батарейным питанием широко доступны, часы с питанием от сети переменного тока имеют лучшую долгосрочную точность — в течение нескольких месяцев.
Это происходит из-за того, что операторы электростанции намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока. Если он отстает на несколько циклов, они восполнят потерянные циклы переменного тока, так что часы не теряют время.
Сравнение больших и малых синхронных двигателей
Выше 10 лошадиных сил (10 кВт), более высокий КПД и ведущий коэффициент мощности делают большие синхронные двигатели полезными в промышленности.Большие синхронные двигатели на несколько процентов более эффективны, чем более распространенные асинхронные двигатели, хотя синхронный двигатель более сложен.
Поскольку двигатели и генераторы похожи по конструкции, должна быть возможность использовать генератор в качестве двигателя и, наоборот, использовать двигатель в качестве генератора.
Асинхронный двигатель подобен генератору переменного тока с вращающимся полем. На рисунке ниже показаны небольшие генераторы переменного тока с вращающимся полем постоянного магнита. На рисунке ниже могут быть изображены либо два параллельно подключенных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, либо генератор переменного тока, приводящий в действие синхронный двигатель.Или это могут быть два двигателя, если подключен внешний источник питания.
Дело в том, что в любом случае роторы должны работать с одинаковой номинальной частотой и находиться в фазе друг с другом. То есть они должны быть синхронизированы . Процедура синхронизации двух генераторов переменного тока заключается в следующем: (1) размыкание переключателя, (2) приведение в действие обоих генераторов с одинаковой скоростью вращения, (3) ускорение или замедление фазы одного блока до тех пор, пока оба выхода переменного тока не будут в фазе, (4) замыкание выключатель до того, как они сойдут по фазе.
После синхронизации генераторы будут заблокированы друг с другом, что потребует значительного крутящего момента, чтобы отделить один блок (не синхронизированный) от другого.
Синхронный двигатель, работающий синхронно с генератором
Учет крутящего момента синхронных двигателей
Если больший крутящий момент в направлении вращения приложен к ротору одного из вышеупомянутых вращающихся генераторов переменного тока, угол ротора будет увеличиваться (противоположно (3)) по отношению к магнитному полю в катушках статора, пока все еще синхронизирован и ротор подает энергию в сеть переменного тока, как генератор переменного тока.
Ротор также будет выдвинут относительно ротора другого генератора. Если нагрузка, такая как тормоз, приложена к одному из вышеуказанных устройств, угол ротора будет отставать от поля статора, как в (3), извлекая энергию из линии переменного тока, как двигатель.
Если приложен чрезмерный крутящий момент или сопротивление, ротор превысит максимальное значение крутящего момента, угол продвигается или отстает настолько, что синхронизация будет потеряна. Крутящий момент развивается только при сохранении синхронизации двигателя.
Доведение синхронных двигателей до скорости
В случае использования небольшого синхронного двигателя вместо генератора переменного тока нет необходимости выполнять сложную процедуру синхронизации для генераторов переменного тока. Однако синхронный двигатель не запускается автоматически и должен быть доведен до приблизительной электрической скорости генератора переменного тока, прежде чем он синхронизируется с частотой вращения генератора.
После набора скорости синхронный двигатель будет поддерживать синхронизм с источником переменного тока и развивать крутящий момент.
Синхронный привод с синхронным двигателем
Предполагая, что двигатель развивает синхронную скорость, когда синусоидальная волна меняется на положительную на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, в то время как верхняя южная катушка притягивает северный полюс ротора. Подобным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке.
К тому времени, когда синусоида достигает пика в точке (2), крутящий момент, удерживающий северный полюс ротора вверх, является максимальным.Этот крутящий момент уменьшается по мере уменьшения синусоидальной волны до 0 В постоянного тока в точке (3) с минимальным крутящим моментом.
Когда синусоида меняется на отрицательную между (3 и 4), нижняя южная катушка толкает южный полюс ротора, притягивая северный полюс ротора. Подобным образом северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. В точке (4) синусоида достигает отрицательного пика с удерживающим моментом снова на максимуме. Когда синусоидальная волна изменяется с отрицательной на 0 В постоянного тока на положительную, процесс повторяется для нового цикла синусоидальной волны.
Обратите внимание, что на приведенном выше рисунке показано положение ротора в режиме холостого хода (α = 0 °). На практике нагрузка на ротор приведет к тому, что ротор будет отставать от положений, показанных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не будет достигнут при α = 90 °.
Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует с переменной полярностью.
Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием.Поскольку поле катушки пульсирует и не вращается, необходимо увеличить скорость ротора с постоянными магнитами с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, похожий на те, что описаны в следующем разделе.
Добавление полюсов поля снижает скорость
2-полюсный (пара полюсов N-S) генератор будет генерировать синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (оборотов в минуту). 3600 об / мин соответствует 60 оборотам в секунду.Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин.
Двигатель с меньшей скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель будет вращаться со скоростью 1800 об / мин, 12-полюсный двигатель — со скоростью 600 об / мин. Показанный стиль конструкции (рисунок выше) предназначен для иллюстрации. Многополюсные синхронные двигатели со статором с более высоким КПД и большим крутящим моментом фактически имеют несколько полюсов в роторе.
Однообмоточный 12-полюсный синхронный двигатель
Вместо того, чтобы наматывать 12 катушек для 12-полюсного двигателя, намотайте одну катушку с двенадцатью соединенными штырями стальными полюсными частями, как показано на рисунке выше.Хотя полярность катушки меняется из-за приложенного переменного тока, предположим, что верхняя часть временно находится на севере, а нижняя — на юге.
Полюса направляют южный поток снизу и снаружи катушки вверх. Эти 6-ю южные части чередуются с 6-ю северными ушками, загнутыми вверх от верхней части стального полюса катушки. Таким образом, стержень ротора с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-ти циклам переменного тока за одно физическое вращение стержневого магнита.
Скорость вращения будет 1/6 электрической скорости переменного тока.Скорость ротора будет 1/6 от скорости 2-полюсного синхронного двигателя. Пример: 60 Гц вращает 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.
Перепечатано с разрешения Westclox History на www.clockHistory.com
Статор (рисунок выше) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция аналогична предыдущему рисунку с одной катушкой. Конструкция с одной обмоткой экономична для двигателей с низким крутящим моментом.Этот двигатель со скоростью 600 об / мин приводит в движение редукторы, перемещая стрелки часов.
Q: Если бы двигатель Westclox работал со скоростью 600 об / мин от источника питания с частотой 50 Гц, сколько полюсов потребовалось бы?
A: 10-полюсный двигатель будет иметь 5 пар полюсов N-S. Он будет вращаться со скоростью 50/5 = 10 оборотов в секунду или 600 об / мин (10 с-1 x 60 с / мин).
Перепечатано с разрешения Westclox History на www.clockHistory.com
Ротор (рисунок выше) состоит из стержня постоянного магнита и стальной чашки асинхронного двигателя.Шина синхронного двигателя, вращающаяся внутри полюсных лапок, сохраняет точное время. Чашка асинхронного двигателя снаружи стержневого магнита подходит снаружи и над язычками для самозапуска. Одно время выпускались несамозапускающиеся двигатели без чашки асинхронного двигателя.
Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, показанный на рисунке ниже, создает электрически вращающееся поле в статоре. Такие двигатели не запускаются автоматически при запуске от источника питания с фиксированной частотой, например, 50 или 60 Гц, как в промышленных условиях.
Кроме того, ротор является не постоянным магнитом для двигателей мощностью несколько лошадиных сил (несколько киловатт), используемых в промышленности, а является электромагнитом. Большие промышленные синхронные двигатели более эффективны, чем асинхронные двигатели. Они используются, когда требуется постоянная скорость. Обладая опережающим коэффициентом мощности, они могут корректировать линию переменного тока на отстающий коэффициент мощности.
Три фазы возбуждения статора складываются векторно, чтобы создать единое результирующее магнитное поле, которое вращается f / 2n раз в секунду, где f — частота линии электропередачи, 50 или 60 Гц для промышленных двигателей, работающих от линии электропередачи.Количество полюсов — n. Для числа оборотов ротора в об / мин умножьте на 60.
S = f120 / n где: S = частота вращения ротора в об / мин f = частота сети переменного тока n = количество полюсов на фазу
Трехфазный 4-полюсный (на фазу) синхронный двигатель будет вращаться со скоростью 1800 об / мин при мощности 60 Гц или 1500 об / мин при мощности 50 Гц. Если катушки запитываются по очереди в последовательности φ-1, φ-2, φ-3, ротор должен указывать на соответствующие полюса по очереди.
Поскольку синусоидальные волны фактически перекрываются, результирующее поле будет вращаться не ступенчато, а плавно.Например, когда синусоидальные волны φ-1 и φ-2 совпадают, поле будет на пике, указывающем между этими полюсами. Показанный ротор стержневого магнита подходит только для небольших двигателей.
Ротор с несколькими полюсами магнита (внизу справа) используется в любом эффективном двигателе, приводящем в движение значительную нагрузку. Это будут электромагниты с контактным кольцом в крупных промышленных двигателях. Крупные промышленные синхронные двигатели запускаются самостоятельно с помощью встроенных в якорь проводов с короткозамкнутым ротором, действующих как асинхронный двигатель.
Электромагнитный якорь возбуждается только после того, как ротор достигает почти синхронной скорости.
Трехфазный 4-полюсный синхронный двигатель
Малые многофазные синхронные двигатели
Малые многофазные синхронные двигатели можно запускать путем линейного увеличения частоты привода от нуля до конечной рабочей частоты. Многофазные управляющие сигналы генерируются электронными схемами и будут прямоугольными во всех приложениях, кроме самых требовательных.
Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными сигналами. Можно использовать двух- или трехфазный привод, запитав соответствующее количество обмоток статора. Выше показано только 3 фазы.
Электронный синхронный двигатель
На блок-схеме показана электроника привода, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока). Эти двигатели имеют датчик положения , встроенный в двигатель, который выдает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя.
Датчик положения может быть таким же простым, как твердотельные датчики магнитного поля, такие как устройства на эффекте Холла , обеспечивающие синхронизацию (направление тока якоря) с электроникой привода. Датчик положения может быть датчиком угла с высоким разрешением, таким как резольвер, индуктосин (магнитный энкодер) или оптический энкодер.
Если требуется постоянная и точная скорость вращения (как для дисковода), могут быть включены тахометр и контур фазовой автоподстройки частоты (рисунок ниже).Этот сигнал тахометра, последовательностью импульсов пропорциональна скорости двигателя, подается обратно в петлю фазовой автоподстройки, который сравнивает частоту и фазу тахометра к источнику опорного стабильно частоты, такие как кварцевый генератор.
Контур фазовой автоподстройки частоты управляет скоростью синхронного двигателя
Бесщеточный двигатель постоянного тока
Двигатель, приводимый в действие прямоугольными волнами тока, обеспечиваемый простыми датчиками Холла, известен как бесщеточный двигатель постоянного тока .Этот тип двигателя имеет более высокое значение пульсаций крутящего момента при обороте вала, чем двигатель с синусоидальным приводом. Для многих приложений это не проблема. Хотя в этом разделе нас в первую очередь интересуют синхронные двигатели.
Пульсации крутящего момента двигателя и механический аналог
Пульсация крутящего момента или зубчатость вызывается магнитным притяжением полюсов ротора к полюсным наконечникам статора. (Рисунок выше) Обратите внимание, что катушки статора отсутствуют.Ротор PM можно вращать вручную, но он будет испытывать притяжение к полюсным наконечникам, когда находится рядом с ними.
Это аналогично механической ситуации. Будет ли пульсация крутящего момента проблемой для двигателя, используемого в магнитофоне? Да, мы не хотим, чтобы мотор поочередно ускорялся и замедлялся, когда он перемещает аудиозапись мимо кассетной воспроизводящей головки. Будет ли пульсация крутящего момента проблемой для двигателя вентилятора? №
Обмотки, распределенные в ленте, создают более синусоидальное поле
Если двигатель приводится в действие синусоидальными волнами тока, синхронными с обратной ЭДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли формы волны привода электронными средствами.Синхронный двигатель будет генерировать синусоидальную обратную ЭДС , если магнитное поле статора имеет синусоидальное распределение.
Он будет более синусоидальным, если обмотки полюсов будут распределены в виде ремня по множеству пазов, а не сосредоточены на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Такая конструкция подавляет многие нечетные гармоники поля статора.
Слоты с меньшим количеством обмоток на краю обмотки фазы могут делить пространство с другими фазами.Намоточные ремни могут принимать альтернативную концентрическую форму, как показано на рисунке ниже.
Концентрические ремни
Для двухфазного двигателя, приводимого в действие синусоидальной волной, крутящий момент остается постоянным на протяжении всего оборота по тригонометрической идентичности:
sin2θ + cos2θ = 1
Для генерации и синхронизации формы сигнала привода требуется более точная индикация положения ротора, чем обеспечивается датчиками Холла, используемыми в бесщеточных двигателях постоянного тока.Резольвер , оптический или магнитный энкодер обеспечивает разрешение от сотен до тысяч частей (импульсов) на оборот.
Резольвер обеспечивает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Энкодеры обеспечивают цифровую индикацию углового положения в последовательном или параллельном формате.
Привод синусоидальной волны на самом деле может быть от ШИМ, широтно-импульсного модулятора , высокоэффективного метода аппроксимации синусоидальной волны цифровым сигналом.Каждая фаза требует, чтобы управляющая электроника для этой формы сигнала была сдвинута по фазе на соответствующую величину.
ШИМ аппроксимирует синусоидальную волну
Преимущества синхронного двигателя
КПД синхронного двигателя выше, чем у асинхронных двигателей. Синхронный двигатель также может быть меньше, особенно если в роторе используются высокоэнергетические постоянные магниты. Появление современной твердотельной электроники позволяет управлять этими двигателями с регулируемой скоростью.
Асинхронные двигатели в основном используются в железнодорожной тяге. Однако небольшой синхронный двигатель, который устанавливается внутри ведущего колеса, делает его привлекательным для таких применений. Версия для высокотемпературных сверхпроводников этого двигателя составляет от одной пятой до одной трети веса двигателя с медной обмоткой.
Самый крупный экспериментальный сверхпроводящий синхронный двигатель, способный управлять кораблем класса военно-морской эсминец. Во всех этих применениях важен электронный привод с регулируемой скоростью.Привод с регулируемой скоростью также должен снижать напряжение привода на низкой скорости из-за уменьшения индуктивного сопротивления на более низкой частоте.
Для развития максимального крутящего момента ротор должен отставать от направления поля статора на 90 °. Больше он теряет синхронизацию. Гораздо меньше приводит к снижению крутящего момента. Таким образом, необходимо точно знать положение ротора. А положение ротора по отношению к полю статора необходимо рассчитывать и контролировать.
Этот тип управления известен как векторное управление фазой .Он реализован с помощью быстродействующего микропроцессора, управляющего широтно-импульсным модулятором фаз статора. Статор синхронного двигателя такой же, как и у более популярного асинхронного двигателя.
В результате электронное управление скоростью промышленного уровня, используемое в асинхронных двигателях, также применимо к большим промышленным синхронным двигателям. Если ротор и статор обычного вращающегося синхронного двигателя раскручены, получается синхронный линейный двигатель.
Этот тип двигателя применяется для точного высокоскоростного линейного позиционирования.
СВЯЗАННЫЙ РАБОЧИЙ ЛИСТ:
Вопрос: что вы подразумеваете под синхронным двигателем?
Что вы подразумеваете под синхронной машиной?
Синхронная машина — это электрическая машина, скорость вращения которой пропорциональна частоте источника переменного тока и не зависит от нагрузки.
В чем разница между синхронным и асинхронным двигателем?
Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора.Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной. Синхронный двигатель не имеет пробуксовки.
Как запускается синхронный двигатель?
Когда на двигатель подается трехфазное питание, двигатель начинает работать как асинхронный со скоростью ниже синхронной. Через некоторое время на ротор подается постоянный ток. Через некоторое время двигатель приводится в синхронизм и начинает работать как синхронный двигатель.
Какие основные части синхронного двигателя?
Статор и ротор являются двумя основными частями синхронного двигателя.Статор становится неподвижным и несет на себе обмотку якоря двигателя. Обмотка якоря является основной обмоткой, из-за которой в двигателе индуцируется ЭДС. Вращатель несет обмотки возбуждения.
Что вы подразумеваете под синхронизацией?
глагол (употребляется с объектом), синхронизируется, синхронизируется. чтобы заставить показывать то же время, что и одни часы с другими: Синхронизируйте ваши часы. чтобы заставить двигаться, двигаться, действовать, работать и т. д. с одинаковой скоростью и точно вместе: они синхронизировали свои шаги и шли вместе.
Почему возбуждение всегда постоянное?
Для успешной работы генератора переменного тока он должен выдавать синусоидальное переменное напряжение определенной частоты. Теперь возбуждение постоянным током создает электромагнит фиксированной полярности в поле, которое движется с постоянной скоростью от первичного двигателя. Таким образом, якорь статора создает почти синусоидальный переменный ток.
Почему он называется синхронным двигателем?
Следовательно, ротор вращается с той же скоростью, что и вращающееся магнитное поле.Это связано с тем, что двигатель называется синхронным двигателем. Это двигатель с постоянной скоростью, потому что, несмотря на увеличение нагрузки, двигатель работает с той же синхронной скоростью.
Какая польза от синхронного двигателя?
Обычно синхронные двигатели используются в приложениях, где требуется точная и постоянная скорость. Эти двигатели с низким энергопотреблением включают в себя позиционирующие машины. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели.
Каковы преимущества синхронного двигателя?
Преимущество использования синхронного двигателя — возможность контролировать коэффициент мощности. Синхронный двигатель с избыточным возбуждением имеет опережающий коэффициент мощности и работает параллельно с асинхронными двигателями, тем самым улучшая коэффициент мощности системы. Скорость остается постоянной независимо от нагрузки в синхронных двигателях.
Синхронный двигатель самозапускается?
Синхронные двигатели больше определенного размера не являются двигателями с самозапуском.Это свойство связано с инерцией ротора; он не может мгновенно следить за вращением магнитного поля статора.
Как запускается двигатель?
Трехфазный асинхронный двигатель самозапускается. Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться, и запускается асинхронный двигатель. Во время пуска скольжение двигателя равно единице, а пусковой ток очень велик.
В чем разница между асинхронным двигателем и синхронным двигателем?
Синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.В случае синхронного двигателя его обмотка якоря питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока, тогда как в случае асинхронного двигателя его обмотка статора питается от источника переменного тока.
Почему он называется синхронным двигателем?
Следовательно, ротор вращается с той же скоростью, что и вращающееся магнитное поле.
Это связано с тем, что двигатель называется синхронным двигателем.
Это двигатель с постоянной скоростью, потому что, несмотря на увеличение нагрузки, двигатель работает с той же синхронной скоростью.
Что вы подразумеваете под синхронным двигателем?
Синхронный электродвигатель — это электродвигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока. Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.
Почему синхронный двигатель не запускается автоматически?
Ключевой момент: в результате средний крутящий момент, действующий на ротор, равен нулю.Следовательно, синхронный двигатель не запускается автоматически. Это связано с тем, что скорость вращения вращающегося магнитного поля настолько высока, что из-за инерции ротора он не может повернуть ротор из исходного положения.
Как запускается синхронный двигатель?
Современные синхронные машины обычно бывают самозапускающимися и выполнены в виде асинхронных двигателей. Синхронный двигатель имеет самозапускающуюся обмотку за счет наличия демпферных обмоток или обмотки с короткозамкнутым ротором в полюсах ротора.Это вращающееся магнитное поле разрезает демпферные обмотки в роторе.
Для чего используются синхронные двигатели?
Обычно синхронные двигатели используются в приложениях, где требуется точная и постоянная скорость. Эти двигатели с низким энергопотреблением включают в себя позиционирующие машины. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели.
Каковы преимущества синхронного двигателя?
Одним из основных преимуществ использования синхронного двигателя является возможность управления коэффициентом мощности.Синхронный двигатель с избыточным возбуждением может иметь опережающий коэффициент мощности и может работать параллельно с асинхронными двигателями и другими нагрузками с отстающим коэффициентом мощности, тем самым улучшая коэффициент мощности системы.1 ноя 2012 г.
Каковы основные части синхронного двигателя?
Статор и ротор являются двумя основными частями синхронного двигателя. Статор — это неподвижная часть, а ротор — это вращающаяся часть машины.
Двигатели постоянного тока запускаются автоматически?
Двигатели переменного тока не запускаются автоматически, поэтому для первоначального запуска двигателя требуется некоторое внешнее оборудование.Двигатель постоянного тока — это самозапускающиеся двигатели. Якорь неподвижен, и магнитное поле вращается в двигателе переменного тока, но в двигателе постоянного тока якорь вращается, и магнитное поле остается неподвижным.27 фев 2019
Что такое явный полюс и неявный полюс?
Ротор с явнополюсным типом состоит из большого количества выступающих полюсов (явных полюсов), установленных на магнитном колесе. Обычно количество выступающих полюсов составляет от 4 до 60. Распределение магнитного потока относительно слабое, чем у ротора с невыявленными полюсами, поэтому генерируемая форма волны ЭДС не так хороша, как у цилиндрического ротора.
Какие двигатели самозапускаются?
Существуют однофазные асинхронные двигатели и трехфазные асинхронные двигатели. Однофазные асинхронные двигатели не являются самозапускающимися двигателями, а трехфазные асинхронные двигатели — самозапускающимися двигателями.
Может ли синхронный двигатель запускаться сам по себе?
Синхронный двигатель с постоянными магнитами запускается точно так же, как и любой другой двигатель, и не требует другого входа, кроме источника питания. Такой двигатель не запустится сам по себе, поскольку крутящий момент, создаваемый обмотками ротора постоянного тока, недостаточен для преодоления инерции ротора.
Как запускается двигатель?
Запуск асинхронного двигателя. Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться, и запускается асинхронный двигатель. Во время пуска скольжение двигателя равно единице, а пусковой ток очень велик.
В чем разница между асинхронным двигателем и синхронным двигателем?
Синхронный двигатель — это машина с двойным возбуждением, тогда как асинхронный двигатель — это машина с одним возбуждением.В случае синхронного двигателя его обмотка якоря питается от источника переменного тока, а его обмотка возбуждения — от источника постоянного тока, тогда как в случае асинхронного двигателя его обмотка статора питается от источника переменного тока.
В чем главный недостаток синхронных двигателей?
К недостаткам синхронного двигателя относятся: Синхронные двигатели требуют возбуждения постоянного тока, которое подается от внешних источников. Эти двигатели не являются самозапускающимися двигателями и требуют внешнего устройства для запуска и синхронизации.Стоимость киловаттной мощности обычно выше, чем у асинхронных двигателей.
В чем разница между синхронными и асинхронными двигателями?
Синхронный двигатель — это машина, скорость ротора которой равна скорости магнитного поля статора. Асинхронный двигатель — это машина, ротор которой вращается со скоростью меньше синхронной. Асинхронный двигатель переменного тока известен как асинхронный двигатель. Синхронный двигатель не имеет пробуксовки.
Каковы преимущества синхронного двигателя с постоянным возбуждением?
Преимуществами синхронного двигателя являются простота управления коэффициентом мощности и постоянная скорость вращения машины независимо от приложенной нагрузки.Однако синхронные двигатели, как правило, дороже, а двигатель постоянного тока. питание — необходимая особенность возбуждения ротора.
Что такое 3-фазный синхронный двигатель?
Синхронные двигатели — это машина с двойным возбуждением, т. Е. К ней предусмотрены два электрических входа. Обмотка статора состоит из трехфазного источника питания трехфазной обмотки статора и постоянного тока для обмотки ротора. Трехфазная обмотка статора, по которой проходят трехфазные токи, создает трехфазный вращающийся магнитный поток.22 июля 2013 г.
Что подразумевается под асинхронным двигателем?
Определение асинхронного двигателя. : двигатель переменного тока, в котором крутящий момент создается за счет реакции между изменяющимся магнитным полем, создаваемым в статоре, и током, индуцируемым в катушках ротора.
Что такое синхронная скорость?
В двигателе синхронная скорость — это скорость, с которой вращается магнитное поле. В зависимости от конструкции двигателя фактическая механическая скорость может быть эквивалентной (синхронный двигатель) или немного меньшей (асинхронный двигатель).Синхронная скорость является функцией: используемой электрической частоты, обычно 60 Гц или 50 Гц. 15 ноя 2015
Синхронный двигатель — PetroWiki
Синхронный двигатель — это тип двигателя переменного тока. Как и асинхронный двигатель, он имеет статор и ротор. Его обмотка статора очень похожа на обмотку асинхронного двигателя, и он также получает мощность переменного тока от источника питания для управления подключенной нагрузкой.
Дизайн
Синхронные двигателидоступны с различными конструкциями ротора для различных применений.В одном из типов, например, ротор сконструирован как ротор с короткозамкнутым ротором. В дополнение к стержням ротора он имеет обмотки катушки для обеспечения возбуждения постоянным током (DC), как показано на Рис. 1 . Обмотки катушки подключаются к внешнему источнику постоянного тока с помощью контактных колец и щеток. Подобно двигателю с короткозамкнутым ротором, синхронный двигатель запускается путем подачи переменного тока на статор; однако мощность постоянного тока подается на катушки ротора после того, как двигатель достигает максимальной скорости. Это создает сильное постоянное магнитное поле в роторе, которое синхронизируется с вращающимся магнитным полем статора.Поскольку ротор вращается с той же скоростью, что и синхронная скорость (скорость вращающегося магнитного поля), скольжения нет. Скорость вращения двигателя в синхронном двигателе постоянна и не зависит от нагрузки, как в асинхронном двигателе.
Рис. 1 — Схема синхронного двигателя (любезно предоставлена Houston Armature Works Inc.).
Коэффициент мощности
Синхронные двигатели рассчитаны на работу при коэффициенте мощности, равном единице (1,0) или 0.8 ведущих коэффициентов мощности. Изменяя возбуждение двигателя постоянным током, можно широко изменять коэффициент мощности двигателя. Синхронные двигатели с перевозбуждением работают с опережающим коэффициентом мощности и имеют реактивные конденсаторы, подобные кВАр. Это дает улучшенный коэффициент мощности для системы электропитания. Поскольку большинство коммунальных предприятий выставляют счета своим промышленным потребителям на основе их использования в киловольтах, а не в киловаттах, улучшенный коэффициент мощности обеспечивает большую экономию для потребителя.
использует
Синхронные двигатели первоначально использовались как способ повышения коэффициента мощности систем, которые имеют большие нагрузки асинхронных двигателей; теперь, однако, они используются, потому что они могут поддерживать напряжение на клеммах в слабой энергосистеме, более дешевы и более эффективны, чем асинхронные двигатели аналогичного размера.
Список литературы
Интересные статьи в OnePetro
Используйте этот раздел, чтобы перечислить статьи в OnePetro, которые читатель, желающий узнать больше, обязательно должен прочитать
Внешние ссылки
Используйте этот раздел, чтобы предоставить ссылки на соответствующие материалы на других веб-сайтах, кроме PetroWiki и OnePetro.
См. Также
Электрическое заземление
Электрораспределительные системы
Коэффициент мощности и конденсаторы
Классификация опасных зон электрических систем
Двигатели переменного тока
Двигатели асинхронные
Электрические системы
Технические характеристики двигателя
Характеристики двигателя NEMA
Электроприводы переменного тока
Кожухи двигателей
PEH: электрические_системы
Категория
Как синхронные конденсаторы влияют на коэффициент мощности
Эта статья продолжает мою предыдущую статью о коэффициенте мощности ( Pumps & Systems , апрель 2016 г., прочтите ее здесь), которая вызвала интересные отклики читателей.В частности, мы рассмотрим вопрос: что такое синхронный конденсатор и какое отношение он имеет к коэффициенту мощности?
Вот краткий обзор коэффициента мощности: Коэффициент мощности — это коэффициент, на который полная мощность, или кВА, умножается для получения кВт.
- кВт = коэффициент мощности x кВА
- Коэффициент мощности = косинус угла = кВт / кВА
Коэффициент мощности — это показатель того, насколько эффективно вы используете электроэнергию.Он определяется как отношение рабочей мощности (кВт) к общей мощности (кВА). Коэффициент мощности 0,7 означает, что 70 процентов электроэнергии, подаваемой на объект, используется эффективно, а 30 процентов расходуется впустую — и эти растраты часто приводят к более высоким счетам за коммунальные услуги.
Асинхронные двигатели всегда поглощают из системы киловольт реактивной мощности (кВАр). Синхронные двигатели могут обеспечивать опережающую мощность в кВАр для улучшения коэффициента мощности системы.
Теперь мы обсудим некоторые жизнеспособные решения для улучшения коэффициента мощности, в частности синхронные конденсаторы.
Синхронный конденсатор — иногда называемый динамическим конденсатором, синхронным конденсатором или синхронным компенсатором — во всех смыслах и целях является синхронным двигателем.
Единственная разница между синхронным двигателем и синхронным конденсатором заключается в том, что вал синхронного конденсатора ни с чем не связан — он просто беспрепятственно вращается.
Единственное назначение синхронного конденсатора — регулировать условия (коэффициент мощности) в сети передачи электроэнергии.
Рисунок 1. 20-полюсный синхронный двигатель 4 кВ мощностью 7200 лошадиных сил.Как работает синхронный двигатель?
Как упоминалось ранее, синхронный двигатель и конденсатор — одно и то же. При этом диаграмма на рисунке 2 показывает условия в синхронном двигателе при работе в синхронном режиме и без нагрузки. Когда двигатель нагружен, ротор опускается обратно по кривой C, кривой синхронного крутящего момента, достаточной для развития момента нагрузки.
Кривая C является результатом момента магнитного сопротивления, Кривая A, и момента определенной полярности, Кривая B.Максимальный синхронный крутящий момент достигается при запаздывании ротора примерно на 70 электрических градусов.
Рисунок 3. Основные компоненты синхронного двигателя включают раму, статор, ротор, возбудитель и обмотку амортизатора.Синхронный двигатель имеет трехфазный статор, аналогичный статору асинхронного двигателя. Устройство запускается как асинхронный двигатель с использованием обмотки амортизатора (см. Рисунок 3), требующей скольжения для создания пускового момента.
Вращающееся поле (ротор) с тем же числом полюсов, что и статор, питается от источника постоянного тока (DC).Ток ротора устанавливает соотношение магнитных полюсов север-юг в парах полюсов ротора, позволяя ротору «синхронизироваться» с потоком вращающегося статора.
Синхронный двигатель в качестве конденсатора
Синхронный двигатель с перевозбуждением (конденсатор) имеет ведущий коэффициент мощности. Увеличение возбуждения поля конденсатора приводит к передаче реактивной мощности (вар) системе.
На промышленном предприятии с большим количеством асинхронных двигателей синхронные двигатели (конденсаторы) могут использоваться для обеспечения части реактивной мощности, необходимой для асинхронных двигателей.Это улучшает коэффициент мощности установки и снижает реактивный ток, требуемый от сети. Основное преимущество синхронного двигателя (конденсатора) — простота регулировки величины коррекции.
В отличие от батареи статических конденсаторов, количество реактивной мощности от синхронного конденсатора можно непрерывно регулировать. Реактивная мощность от статической конденсаторной батареи уменьшается при уменьшении напряжения сети, в то время как синхронный конденсатор может увеличивать реактивный ток при понижении напряжения.
Еще одним преимуществом синхронных конденсаторов является их способность управлять уровнями напряжения. Синхронный конденсатор, естественно, обеспечивает большую реактивную мощность при низком напряжении и поглощает больше реактивной мощности от высокого напряжения, к тому же полем можно управлять, как упоминалось ранее. Реактивная мощность улучшает регулирование напряжения в таких ситуациях, как запуск больших двигателей или в системах, где мощность должна перемещаться на большие расстояния от места выработки до места использования.
Заключение
Электрогенераторы хотели бы, чтобы их потребители представляли нагрузку в энергосистему с коэффициентом мощности, максимально близким к единице.К сожалению, этого не происходит с учетом количества асинхронных машин. Однако от электросети требуется обеспечивать пиковое напряжение и ток в форме волны в любой момент времени.
Коэффициент мощности менее 1 приводит к увеличению стоимости генератора. Многие коммунальные предприятия перекладывают эти расходы на своих клиентов в виде платы за коррекцию коэффициента мощности. Следовательно, достижение единичного коэффициента мощности за счет использования синхронных конденсаторов может быть беспроигрышной ситуацией как для энергосистемы, так и для потребителя.
Чтобы прочитать больше статей о двигателях и приводах, перейдите сюда.Введение в синхронный двигатель — инженерные знания
Здравствуйте, друзья, я надеюсь, что все вы в порядке. В сегодняшнем руководстве мы рассмотрим Introduction to Synchronous Motor. Двигатели переменного тока — это такие устройства системы электроснабжения, которые преобразуют электрическую мощность в механическую в зависимости от того, является ли входное питание однофазным или трехфазным. Наиболее часто используемые двигатели переменного тока — это асинхронный двигатель и синхронный двигатель.
По конструкции синхронный двигатель сравним с синхронным генератором, любая синхронная машина может работать как синхронный двигатель или генератор. Нормальные характеристики этих двигателей составляют от пятидесяти киловатт до одного мегаватта, а их скорость вращения составляет от пятидесяти до восемнадцати сотен оборотов в минуту (об / мин). Основным недостатком этого двигателя является то, что он не запускается автоматически, в то время как асинхронный двигатель самозапускается. В сегодняшнем посте мы рассмотрим его принцип работы, конструкцию, способ запуска и другие связанные термины.Итак, давайте начнем с Introduction to Synchronous Motor.
Введение в синхронный двигатель
- Синхронный двигатель — это такой двигатель, в котором скорость вращения ротора идентична синхронной скорости, синхронная скорость — это скорость вращения магнитного поля, создаваемого на статоре статора. мотор.
- Статор двигателя является электромагнитным, который создает поле, когда в статоре подается ток, такая скорость вращения поля называется синхронной скоростью.
- Ротор синхронного двигателя ведет себя как постоянный магнит или электромагнит, и его поле взаимодействует с полем статора, а не вращается одновременно с вращением поля статора.
- Синхронный двигатель также известен как с двойной подачей , потому что его ротор и статор оба подключены к источнику питания входных сигналов.
- Обычно используемые двигатели переменного тока — это асинхронные и синхронные двигатели.
- Основное различие между этими двумя двигателями заключается в том, что синхронный двигатель вращается с постоянной скоростью, которая аналогична скорости вращения поля статора.
- В то время как в асинхронном двигателе требуется скольжение, это означает, что скорость вращения ротора меньше скорости вращающегося поля на статоре.
- Двигатель малого номинала используется в различных часах, магнитофоне, чтобы обеспечить точную скорость для этого устройства.
- Более крупные двигатели, которые используются в энергосистеме, выполняют две функции: первая — это преобразование электрической энергии в механическую, вторая — эти двигатели регулируют коэффициент мощности системы до единицы или почти до единицы.
Принцип работы синхронного двигателя
- Для понимания принципа работы синхронного двигателя, возьмем двухполюсный двигатель, показанный на данном рисунке.
- Как известно, в случае синхронной машины это либо двигатель, либо генератор, ее обмотки возбуждения находятся на роторе, а обмотки якоря — на статоре, но в асинхронных машинах все по-другому.
- Когда на ротор подается ток возбуждения, чем создается поле на роторе.
- Затем трехфазное питание , подаваемое на статор, также вырабатывает трехфазный ток на статоре.
- Из-за 3-фазного тока на статоре создает фазовращающееся поле на статоре B S .
- Итак, теперь в этом синхронном двигателе есть 2 выхода поля, тогда поле ротора B R будет пытаться следовать за полем статора, как и 2 магнита, которые расположены близко друг к другу, будут пытаться выровняться .
- Поскольку поле статора B S вращательное, поле ротора пытается непрерывно следовать за полем статора.
- Если между этими двумя полями имеется большой угол, тогда сила, приложенная к ротору, будет выше, поэтому ротор перемещается, поскольку его поле пытается захватить поле ротора.
- Главный принцип работы синхронных двигателей заключается в том, что их роторы постоянно пытаются следовать за скоростью вращения поля статора таким образом, чтобы двигатель работал.
- Почти все аспекты синхронного двигателя, такие как конструкция, работа, аналогичны синхронному генератору , но разница в том, что генератор преобразует механическую энергию в электрическую, а двигатель преобразует электрическую в механическую.
- Из-за этого направление потока мощности будет противоположным потоку мощности генератора, и ток также будет обратным.
- Таким образом, эквивалентная схема синхронного двигателя будет аналогична эквивалентной схеме синхронного генератора, но направление потока тока I A и будет противоположным генератору.
- Результирующая схема синхронного двигателя показана на данном рисунке.
- На этом рисунке показана пофазная эквивалентная схема двигателя.
- Если мы применим KVL (закон напряжения Кирхгофа) к эквивалентной схеме синхронного двигателя, то мы получим эти уравнения.
Vø = E A + jX S I A + R A I A
E A = Vø — jX S I A — R A I A
- Эти уравнения аналогичны синхронному генератору, но разница в том, что знак другой.
- Для дальнейшего понимания работы синхронного двигателя давайте предположим, что синхронный генератор связан с бесконечной шиной (эта шина имеет постоянное значение частоты и напряжения при различных значениях нагрузка, связанная с ним).
- Первичный двигатель генератора передает крутящий момент на генератор в направлении вращения генератора.
- Схема синхронных векторов, подключенных к большой энергосистеме (бесконечная шина), показана на данном рисунке.
- Здесь показан результирующий рисунок поля.
- Поле ротора B R генерирует внутреннее генерируемое напряжение (E A ), сетевое поле (B net ) генерирует фазное напряжение (В ø ) и поле статора (E S ) производит (E stat = -jXsI A )
- Из рисунка поля и векторной диаграммы генератора видно, что их направление вращения — против часовой стрелки.
- Для расчета крутящего момента, индуцированного в генераторе, мы можем использовать приведенное выше значение поля и можем записать уравнение для крутящего момента, индуцированного как.
t ind = kB R x B net
t ind = kB R B net sinδ
- Если мы наблюдаем значение поля, мы можем заметить, что t ind направление — по часовой стрелке, противоположное вращению генератора.
- Можно сказать, что этот индуцированный крутящий момент противостоит силе, приложенной крутящим моментом t app первичным двигателем.
Предположим, что в месте вращения вала в направлении движения первичный двигатель резко снижает мощность и начинает тянуть вал генератора. Что теперь происходит с генератором?
- Из-за этого скорость вращения ротора будет уменьшаться и отставать от поля генератора. Это показано на данном рисунке.
- Из-за низкой скорости вращения ротора поле ротора (B R ) также будет уменьшаться и запаздывать сетевое поле (B net ) из-за этой работы генератора резко меняется.
t ind = kB R x B net
- Из этого уравнения мы можем видеть, что, когда поле ротора (B R ) отстает от чистого поля (B net ), направление индуцированный крутящий момент также изменяется, и он следует по пути против часовой стрелки.
- Проще говоря, мы можем сказать, что крутящий момент теперь соответствует траектории вращения, и генератор становится двигателем.
- Увеличение угла крутящего момента (δ) приводит к созданию более высокого крутящего момента в направлении движения до тех пор, пока в конечном итоге индуцированный крутящий момент в двигателе не будет аналогичен крутящему моменту нагрузки на его валу.
- В этот момент генератор работает с синхронной скоростью, но теперь он ведет себя как двигатель.
Кривая напряжения синхронного двигателя
- Кривая напряжения В синхронного двигателя представляет собой графическое представление между током, протекающим через статор, и током возбуждения, протекающим через ротор.
- На данном рисунке вы можете увидеть график между током якоря Ia и током возбуждения If, и его формы похожи на буквенную «V», поэтому она называется V-кривой.
- Значение коэффициента мощности P.F можно изменять, изменяя значение тока возбуждения. Как мы уже обсуждали, значение тока якоря зависит от изменения тока возбуждения.
- Предположим, что синхронный двигатель работает без нагрузки. Таким образом, если изменить или увеличить значение тока возбуждения, ток якоря Ia начинает уменьшаться и достигает своего наименьшего значения.
- На этом этапе фактическое значение мощности двигателя равно «1».
- Синхронный двигатель состоит из двух основных частей: первая — это вращающаяся часть, называемая ротором, а вторая — статическая часть, известная как статор.
- Сборка статора асинхронного двигателя аналогична синхронному двигателю.
- Но разница в конструкции ротора состоит в том, что ротор синхронного двигателя подключен к внешнему источнику возбуждения, а у асинхронного двигателя это питание отсутствует, и он показывает самозапуск.
- Статическая часть синхронного двигателя состоит из обмоток, которые размещены в разных пазах статора.
- Расположение обмоток в этом двигателе аналогично расположению обмоток на статоре синхронного генератора.
| Синхронный двигатель | Асинхронный двигатель |
| Когда входное питание подается на статор двигателя, он движется при синхронной скорости. Синхронная скорость — это скорость вращения поля на статоре. | Скорость вращения асинхронного двигателя меньше синхронной скорости. |
| Его ротор соединен с отдельным источником постоянного тока, который обеспечивает возбуждение ротора для самозапуска. | Асинхронный двигатель самозапускающийся, нет необходимости в отдельном источнике постоянного тока. |
| При начальном процессе работы двигателя скорость вращения ротора должна быть равна синхронной скорости. Если это происходит, то ротор магнитно связан с полюсами, закрепленными на роторе полем, так что ротор продолжает свою работу с синхронной скоростью. | Нет необходимости в отдельной цепи для запуска двигателя. |
| Основное различие между асинхронным двигателем и синхронным двигателем заключается в том, что синхронный двигатель требует внешнего источника постоянного тока. | Отсутствует источник постоянного тока. |
| Контактные кольца и угольные щетки соединены с синхронным двигателем. | Нет необходимости в контактных кольцах и угольных щетках, что упрощает конструкцию. |
| Этому двигателю требуется специальная цепь для вращения ротора с синхронной скоростью. | Никаких специальных схем не требуется. |
| Значение коэффициента мощности синхронного двигателя может быть запаздывающим, единичным или опережающим | Из-за индуктивной нагрузки он всегда работает с запаздывающим коэффициентом мощности |
| КПД этих двигателей выше, чем у асинхронных двигателей. | Его КПД меньше, чем у синхронного двигателя. |
| Цена у него тоже выше. | Это дешевле. |
- Здесь упоминаются некоторые применения синхронного двигателя.
- Основное назначение установки в различных энергосистемах — поддержание коэффициента мощности.
- Эти двигатели также используются для регулирования напряжения.
- Используется в таких системах, где работают меньшие скорости и более высокие нагрузки.
- Компрессоры в основном состоят из синхронного двигателя.
- Кривошипы, шлифовальные машины или там, где работает высокая мощность нагрузки, где используются эти двигатели.
Разница между синхронным двигателем и асинхронным двигателем
- Это некоторые различия между синхронным и асинхронным двигателем.
| Синхронный двигатель | Асинхронный двигатель |
| В этом типе двигателя скорость входного питания, подаваемого на статор, равна скорости вращения ротора. | Скорость вращения ротора меньше скорости вращения поля у статора. |
| Двигатель с гистерезисом, реактивный двигатель, бесщеточный двигатель являются синхронными двигателями. | Асинхронный двигатель известен как асинхронный двигатель. |
| Пробуксовка для этих моторов равна нулю. | в этом двигателе скольжение имеет некоторое значение. |
| Для запуска требуется отдельный источник. | Этот двигатель не имеет отдельного источника. |
| Контактные кольца и угольные щетки соединены с синхронным двигателем. | Нет необходимости в контактных кольцах и угольных щетках, что упрощает конструкцию. |
| также потребовались контактные кольца и угольные щетки. | Контактное кольцо и угольные щетки для этого двигателя не требуются. |
| Дороже асинхронного двигателя. | Он дешевле. |
| Его КПД высокий. | Его КПД меньше, чем у синхронного двигателя. |
| Его мощность может изменяться в зависимости от подключенной нагрузки. | Он всегда работает с индуктивным коэффициентом мощности. |
| Его скорость остается постоянной независимо от изменения нагрузки. | Его скорость уменьшается с увеличением нагрузки. |
| Это не самозапускаемый двигатель | Это самозапускаемый двигатель. |
| Изменение приложенного напряжения не влияет на крутящий момент двигателя. | Изменение приложенного напряжения также влияет на крутящий момент двигателя. |
Характеристики синхронного двигателя
- Поскольку физическая структура синхронного двигателя аналогична синхронному генератору, их номинальные характеристики также будут аналогичными.
- Основное отличие состоит в том, что внутреннее генерируемое высокое значение напряжения обеспечивает опережающий коэффициент мощности вместо запаздывания, поэтому эффект экстремального значения If обозначается как номинальное значение ведущего коэффициента мощности.
- Поскольку мощность двигателя является механической, мощность двигателя будет в л.с., а не в кВт. На данном рисунке показан номинал большого двигателя.
- Важно то, что синхронные двигатели малых номиналов также имеют коэффициент эксплуатации, указанный на паспортной табличке.
- Проще говоря, синхронный двигатель более предпочтителен для применения с меньшей скоростью и большей мощностью, чем асинхронный двигатель, поэтому эти двигатели обычно используются для таких приложений, где работают высокие нагрузки.
Преимущество синхронного двигателя
- Это некоторые преимущества синхронного двигателя .
- Основным преимуществом этого двигателя является то, что он поддерживает коэффициент мощности системы.
- Его скорость всегда остается постоянной при увеличении или уменьшении нагрузки, что делает его наиболее эффективным для промышленного использования.
- Эти двигатели обеспечивают механическую стабильность, чем асинхронные двигатели, благодаря большему воздушному зазору.
- Его мощность линейно зависит от напряжения.
- Его КПД выше, чем у асинхронного двигателя почти на девяносто процентов.
Синхронный двигатель Недостатки
- Помимо преимуществ и преимуществ, этот двигатель также имеет некоторые недостатки, которые описаны здесь.
- Синхронный двигатель не самовозбуждается, для этого требуется специальный источник постоянного тока.
- Это тоже не самозапуск, нужны специальные приспособления для самозапуска.
- Его цена за киловатт-час больше, чем у асинхронного двигателя.
- Из-за наличия токосъемника и угольных щеток цена выше.
Это все о синхронном двигателе, почти все, что связано с синхронным двигателем, упоминается в этом руководстве. Если у вас есть какие-либо вопросы, задавайте их в комментариях. до встречи в следующем учебном пособии Кривая характеристики крутящего момента-скорости синхронного двигателя.