Датчики Холла Si72xx компании Silicon Labs
Датчики Холла Si72xx компании Silicon Labs
Компания Silicon Labs выпускает три линейки интегральных датчиков магнитного поля на эффекте Холла серии Si72xx. Они предназначены для реализации разнообразных датчиков и детекторов положения и перемещения. В сравнении с аналогичными решениями других производителей датчики Si72xx выделяются минимальным энергопотреблением и высокой чувствительностью.
ОБЩИЕ СВЕДЕНИЯ
Среди датчиков Si72xx есть как типовые микросхемы с базовыми функциями, так и решения с различными дополнительными модулями, среди которых
- встроенный датчик температуры, схема термокомпенсации,
- поддержка режима пониженного энергопотребления,
- встроенный цифровой фильтр,
- функция автокалибровки (self-test),
- блок контроля вмешательства (tamper detection), детектирующий аномально высокое магнитное поле,
- цифровой интерфейс I²C для чтения данных и настройки параметров датчика.

На данный момент датчики доступны в корпусах SOT23 с тремя или с пятью выводами. В ближайшем будущем будут выпущены модели в корпусах DFN-8 и TO-92.
Датчики серии SI72xx чувствительны к магнитному полю, приложенному перпендикулярно к плоскости корпуса. Допустимые варианты расположение датчика относительно магнитного поля приведены на рисунках. Для детекторов движения, угла поворота, для контроля магнитного поля в 3D пространстве используют два или три датчика.
Датчики Холла SI72xx представлены следующими типами:
- Биполярная защелка с гистерезисом (Триггер, Latch)
- Униполярный пороговый с гистерезисом и детектором вмешательства (Ключ, Unipolar Switch)
- Омниполярный пороговый с гистерезисом и детектором вмешательства (Ключ, Omnipolar Swith)
- Линейный с аналоговвым выходом
- Линейный с ШИМ-выходом
- Линейный с SENT-выходом
СЕРИЯ SI720X — ЦИФРОВЫЕ КЛЮЧИ И ТРИГГЕРЫ
Датчики Холла серии Si720x производят измерения в определенной частотой и формируют выходной сигнал согласно измеренному уровню магнитного поля в зависимости от запрограммированных порогов. Si720x имеют один либо два информационных выхода.
Si720x имеют один либо два информационных выхода.
Датчики Si720x выпускаются как в 3-выводном, так и в 5-выводном корпусе. Трехвыводные датчики имеют линии питания, земли и линию выхода, в то время как для датчиков в 5-выводном корпусе доступны два дополнительных сигнала:
- Первый дополнительный вывод служит для перевода микросхемы в режим сна (DIS)
- Второй вывод служит для сигнала блока контроля вмешательства (TAMPERb)
У 3-выводных датчиков Холла с поддержкой функции tamper detection при превышении порога детектора вмешательства на выходе выставляется «0».
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов |
Выходной сигнал |
Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
| Si7201-00 | 3 |
Омниполярный пороговый с гистерезисом, выход Push-pull |
5 Гц | Bop = ±1. 1 мТ (max) 1 мТ (max)Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7201-01 | ||||
| Si7201-02 | Bop = ±0.9 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.2 (typ) |
|||
| Si7201-03 | Bop = ±2.8 мТ (max) Brp = ±1.1 мТ (min) | Bop — Brp | = 0.6 (typ) |
|||
| Si7201-04 | 1 Гц | Bop = ±1.4 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
||
| Si7201-05 | 5 Гц | Bop = ±2.0 мТ (max) Brp = ±0.6 мТ (min) | Bop — Brp | = 0.6 (typ) |
||
| Si7201-06 | Омниполярный пороговый с гистерезисом, выход открытый коллектор |
|||
| Si7201-07 | ||||
| Si7201-08 | Bop = ±2.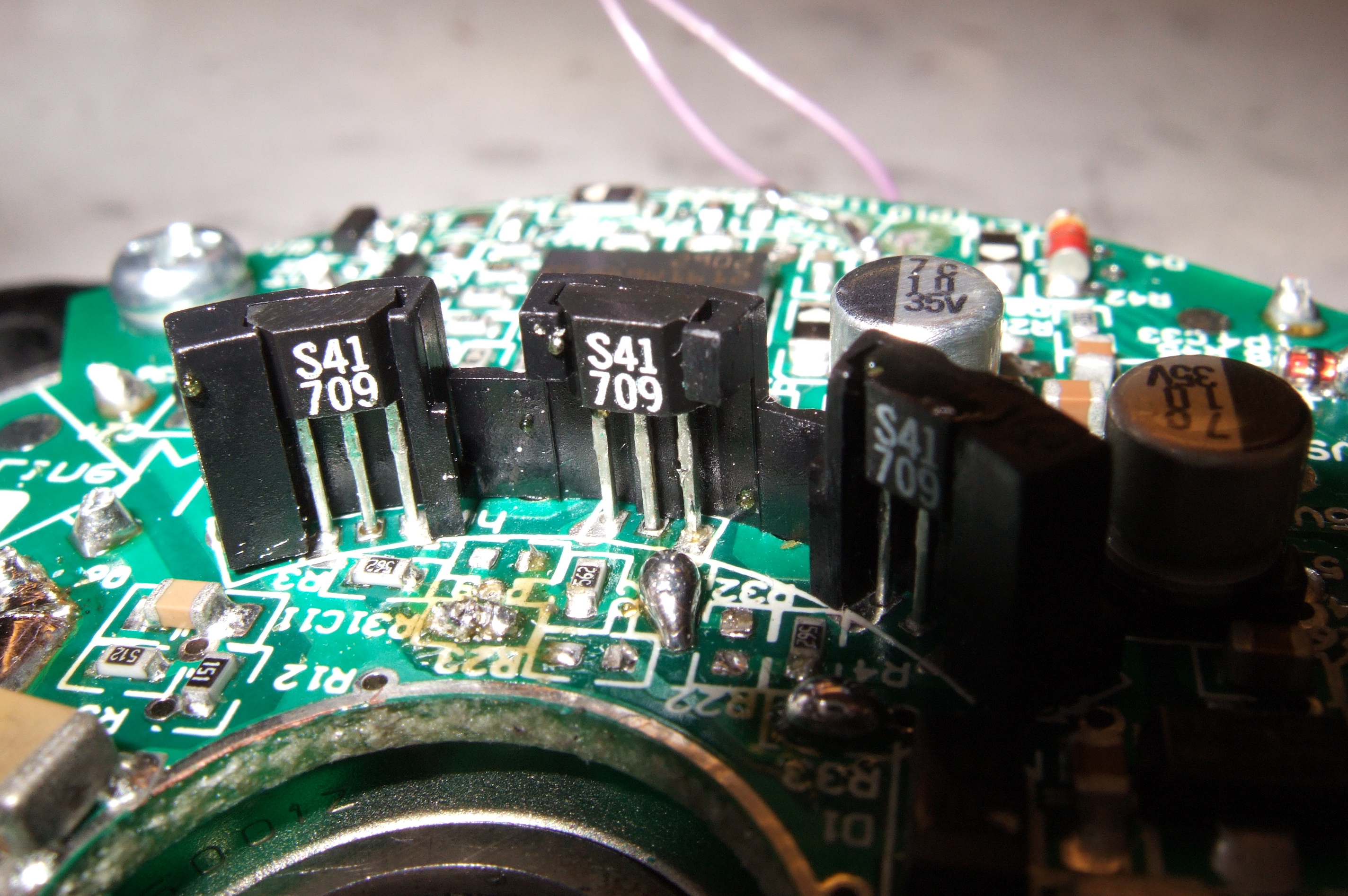 8 мТ (max) 8 мТ (max)Brp = ±1.1 мТ (min) | Bop — Brp | = 0.6 (typ) |
|||
| Si7202-00 |
Биполярная защелка с гистерезисом, выход Push-pull |
Bop = +0.65 мТ (max) Bop = +0.15 мТ (min) Brp = -0.65 мТ (max) Brp = -0.15 мТ (min) | Bop — Brp | = 0.8 (typ) |
||
| Si7202-01 | Bop = +1.4 мТ (max) Bop = +0.6 мТ (min) Brp = -1.4 мТ (max) Brp = -0.6 мТ (min) | Bop — Brp | = 2.0 (typ) |
|||
| Si7203-00 | 5 |
Омниполярный пороговый с гистерезисом, выход открытый коллектор |
1 кГц | Bop = ±1.1 мТ (max) Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7204-00 |
Биполярная защелка с гистерезисом, выход Push-pull |
Bop = +1.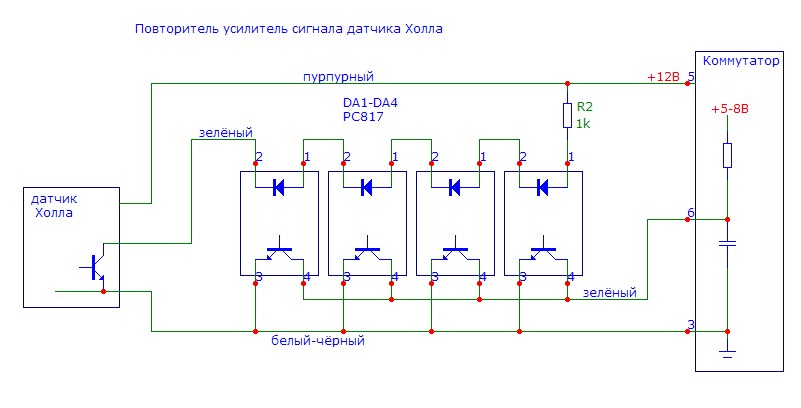 1 мТ (max) Bop = +0.6 мТ (min) 1 мТ (max) Bop = +0.6 мТ (min)Brp = -1.1 мТ (max) Brp = -0.6 мТ (min) | Bop — Brp | = 1.8 (typ) |
| Тип датчика | Дополнительные функции | Напряжение питания | Рабочий диапазон температур |
||||||
| Блок tamper detection | Схема температурной компенсации |
Встроенный датчик температуры |
Поддержка автокалибровки |
Цифровой фильтр | Режим измерений |
Режим сна | |||
| Si7201-00 | нет | нет | нет | нет | нет | 1. 7 — 3.6 В 7 — 3.6 В |
5 мА |
0 .. 70 °C или -40 .. 125 °C
|
|
| Si7201-01 | да, порог ±19.8 мТ | ||||||||
| Si7201-02 | да (0.12%/°C) | да (FIR с выборкой 4) | |||||||
| Si7201-03 | нет | нет | нет | 1.7 — 5.5 В | |||||
| Si7201-04 | |||||||||
| Si7201-05 | да, порог ±19.8 мТ | ||||||||
| Si7201-06 | нет | ||||||||
| Si7201-07 | да, порог ±19.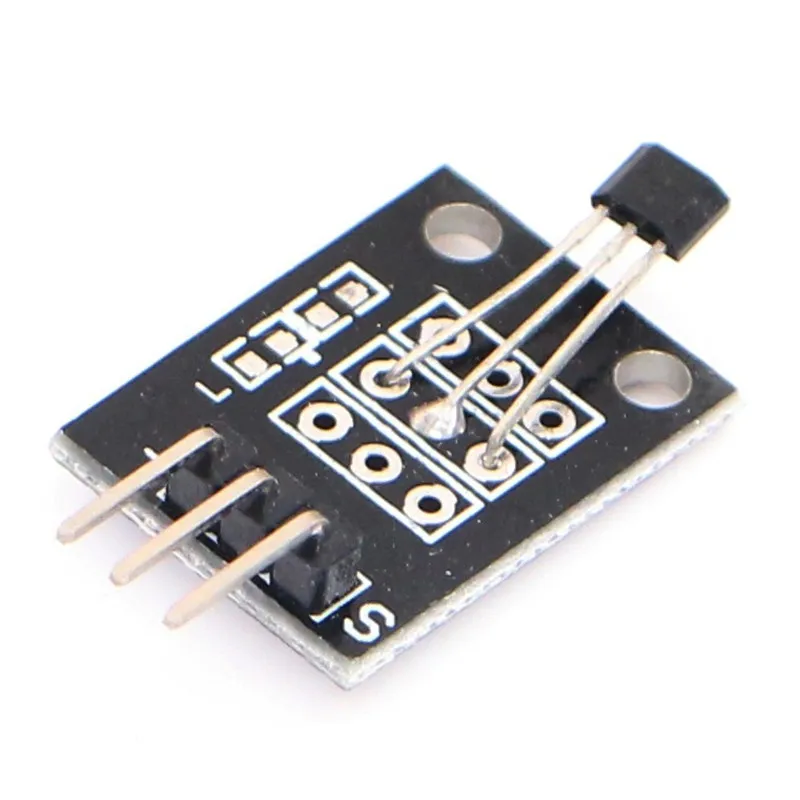 |
||||||||
| Si7201-08 | нет | ||||||||
| Si7202-00 | 1.7 — 3.6 В | ||||||||
| Si7202-01 | 1.7 — 5.5 В | ||||||||
| Si7203-00 | да, порог ±19.8 мТ | 1.7 — 3.6 В |
от 50 нА |
||||||
| Si7204-00 | нет | ||||||||
СЕРИЯ SI721X — ДАТЧИКИ ХОЛЛА С ЛИНЕЙНЫМ ВЫХОДОМ
Датчики серии Si721x работают на фиксированной частоте и имеют один выход. Доступно три типа выходного сигнала:
- аналоговый
- ШИМ-сигнал
- однопроводной протокол SENT
Датчики Si721x выпускаются как в 3-выводном, так и в 5-выводном корпусе.
- Первый дополнительный вывод служит для перевода микросхемы в режим сна (DIS)
- Второй вывод служит для запуска функции автокалибровки (BIST)
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов | Выходной сигнал | Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
| Si7211-01 | 3 | Аналоговый | 7 кГц | |
| Si7212-00 | выход Push-pull, ШИМ-сигнал | 300 Гц | ||
| Si7213-00 | выход открытый коллектор, SENT-сигнал * | 1 кГц | ||
| Si7217-01 | 5 | 7 кГц |
* SENT (Single Edge Nibble Transmission) — это однонаправленный асинхронный протокол, распространенный в автомобильной промышленности. Описание стандартна доступно в документации на Si721x, а также на сайте standards.sae.org.
Описание стандартна доступно в документации на Si721x, а также на сайте standards.sae.org.
| Тип датчика | Дополнительные функции | Напряжение питания | Потребляемый ток | Рабочий диапазон температур | |||||
| Блок tamper detection | Схема температурной компенсации |
Встроенный датчик температуры |
Поддержка автокалибровки |
Цифровой фильтр |
|||||
| Режим измерений @ Vdd = 3.  3 В 3 В |
Режим сна |
||||||||
| Si7211-01 | нет | нет | нет | нет | да (FIR с выборкой 16) | 2.25 — 5.5 В | 5.5 мА | -40 .. 125 °C | |
| Si7212-00 | 1.7 — 5.5 В | 5.0 мА | |||||||
| Si7213-00 | да, через установку «0» на линии выходного сигнала | ||||||||
| Si7217-01 | да, через отдельный вывод | 2.25 — 5.5 В | 7.0 мА | ||||||
СЕРИЯ SI7210 С ПОДДЕРЖКОЙ I2C И ВСТРОЕННЫМ ДАТЧИКОМ ТЕМПЕРАТУРЫ
По сравнению с другими датчиками Холла Silicon Labs, датчики серии Si7210 имеют наиболее широкий набор функций.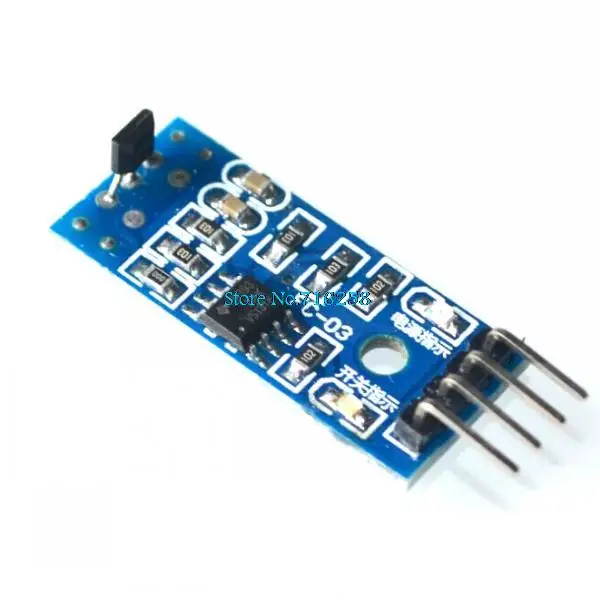
Микросхемы данной серии оснащены цифровым интерфейсом I²C, который используется как для чтения данных, так и для изменения конфигурации датчика. На шине I²C также доступен сигнал с датчика температуры.
Датчики Si7210 выпускаются только в 5-выводном корпусе. Помимо линии питания, земли и двух линий шины I²C эти микросхемы дополнительную линию. Дополнительный вывод может использоваться как аналоговый выход или как цифровой выход, который можно использовать как сигнал прерывания для управляющего микроконтроллера.
Настройка датчика Si7210 по интерфейсу I²C позволяет
- изменять границы диапазона измерений
- изменять режим работы и состояние дополнительного выхода
- настраивать длительность режима сна (позволяет снизить энергопотребление до 50 нА в зависимости от температуры)
- настраивать порог срабатывания блока контроля вмешательства (tamper detection)
- включать цифровой фильтр для подавления шумов на выходе, выбирать тип фильтра (FIR или IIR) и размер выборки (от 2 до 212)
- настраивать частоту измерений
- настраивать параметры схемы температурной компенсации
- включать встроенную на чип катушку, которая создаёт магнитное поле достаточной силы для выполнения калибровки (self-test) датчика *
* Калибровочные параметры могут быть запрограммированы во встроенную энергонезависимую память датчика
Документация на серию доступна на сайте производителя.
| Тип датчика | Количество выводов | Выходной сигнал | Частота измерений | Индукция срабатывания Bop, индукция отпускания, Brp |
||
| Основной выход | Дополнительный выход | |||||
| Режим работы | Доп. выход в режимах 2, 3, 4 | |||||
| Si7210-00 | 5 | I²C |
Режим выбирается через I²C:
|
выход Push-pull | Настраивается через I²C | Bop = ±1. 1 мТ (max) 1 мТ (max)Brp = ±0.2 мТ (min) | Bop — Brp | = 0.4 (typ) |
| Si7210-01 | выход открытый коллектор | |||||
| Si7210-02 | выход Push-pull | |||||
| Si7210-03 | ||||||
| Si7210-04 | ||||||
| Si7210-05 | ||||||
| Тип датчика | Дополнительные функции | Напряжение питания |
Потребляемый ток |
Рабочий диапазон температур | |||||
| Блок tamper detection | Схема температурной компенсации | Встроенный датчик температуры | Поддержка автокалибровки | Цифровой фильтр | Режим измерений |
Режим сна |
|||
| Si7210-00 | да, порог настраивается через I²C | да | да, доступен на I²C Точность ±1.  0 °C 0 °C |
да | да (FIR или IIR) Тип и выборка настраивается через I²C |
1.7 — 5.5 В | 5.0 мА @ 3.3 В |
от 50 нА | -40 .. 125 °C |
| Si7210-01 | |||||||||
| Si7210-02 | да, доступен на I²C Точность ±4.0 °C |
||||||||
| Si7210-03 | нет | ||||||||
| Si7210-04 | |||||||||
| Si7210-05 | |||||||||
СХЕМА ФОРМИРОВАНИЯ АРТИКУЛА
Полный артикул датчика кодируется следующим образом:
Тип датчика (см. таблицы выше) таблицы выше) |
|||||
| Ревизия микросхемы: • A, B и т.д. |
|||||
| Тип датчика (см. таблицы выше) | |||||
| Рабочий диапазон температур: • I — от -40 до +125°C • F — от 0 до +70°C |
|||||
| Корпус: • B — TO92 • M — DFN8 • V — SOT23 |
|||||
| Упаковка: • _ — стандартная • R — лента |
|||||
| Si7210 | -B- | 00 | -I | V | -R |
Так, например, датчик типа Si7210-00 в корпусе SOT23 и с рабочим диапазоном температур -40 до +125°C будет иметь код для заказа Si7210-B-00-IV-R.
СРЕДСТВА ОТЛАДКИ
Для знакомства с датчиками Холла серии Si72xx и для разработки приложений на базе этих датчиков предлагается набор Si72xx-WD-Kit.
В набор входят следующие компоненты:
- Отладочная плата для микроконтроллеров EFM32 Happy Gecko с предустановленными демо-программами
- Плата-расширение Wheel Demo EXP board, на которой установлено колесо прокрутки и два датчика Холла под углом 90 градусов друг к другу
- 6 дочерних плат с датчиками Si72xx разных типов
- 2 магнита
- USB-кабель
- кабели для подключения дочерних плат
Наличие на складе
Радиосхемы. — Датчик Холла SS526DT
материалы в категории
Датчик Холла SS526DT
Импульсный датчик скорости и направления вращения преобразует скорость и направление вращения деталей механизма в один электрический сигнал для последующего измерения и индикации параметров работы. Системы автоматического управления могут использовать датчик для включения в петлю обратной связи.
Системы автоматического управления могут использовать датчик для включения в петлю обратной связи.
Информация, поступающая от датчика, необходима для формирования управляющих сигналов в системах регулирования и стабилизации параметров перемещения механических узлов автоматизированного объекта. Применения такого датчика требует контроль оборотов выходных валов редукторов, определение направления вращения двух и более синхронизируемых механизмов, учет расхода жидкости и многие другие приборы. Датчик использует всего три провода, с помощью которых подается питание и передается сигнал частоты и направления вращения в прибор системы автоматического управления. Датчик предназначен для применения в системах автоматизации поточных линий, транспортных системах и в других системах автоматического управления.
Технические характеристики микросхемы SS526DT
Измеряемая скорость вращения ….. 0,3…3000 об/мин
Температура эксплуатации ………… –25…+60 °С
Напряжение питания ………………. 6,5…18 Вольт
6,5…18 Вольт
Краткое описание работы датчика Холла
В основе работы датчика лежит преобразование перемещения в электрический сигнал которое выполняет компонент использующий эффект Холла – микросхема SS526DT производства компании Honeywell.
Микросхема содержит два полупроводниковых элемента, генерирующих разность потенциалов при воздействии магнитного поля. Она позволяет определить скорость и направление вращения. Информация об этих параметрах поступает от микросхемы SS526DT в схему датчика с двух соответствующих выходов в цифровом виде: скорости движения соответствует частота импульсов с выхода Speed (далее Скорость), направлению соответствует логический уровень на выходе Direction (далее Направление).
Конструкция датчика скорости и направления оборотов
Вращательное перемещение воспринимает вал датчика через закрепленную на нем шестерню. На валу расположен диск, в котором установлены постоянные магниты.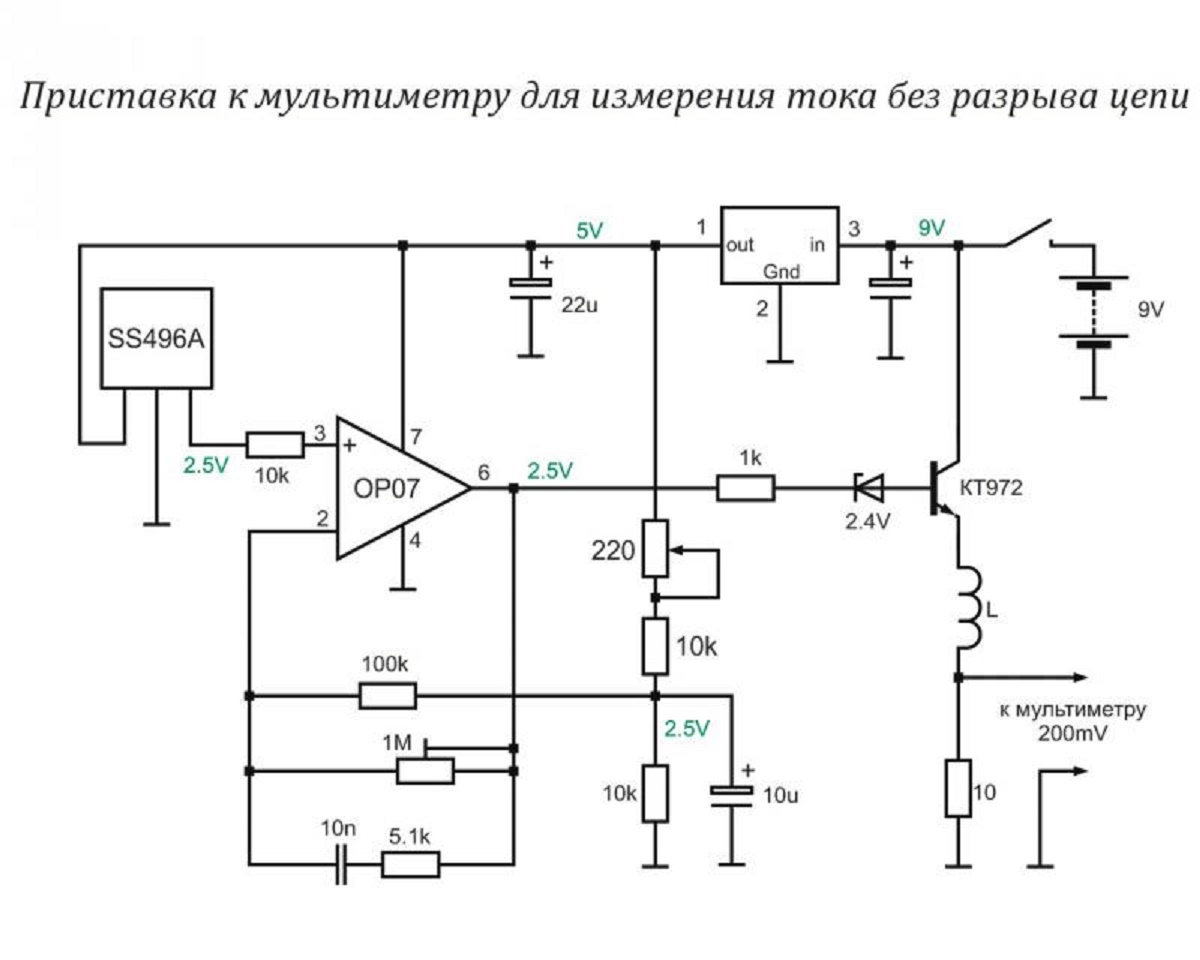 Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера. Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT.
Применение неодимовых магнитов (самых сильных постоянных магнитов) позволяет уместить на диске достаточное количество малогабаритных магнитов. Свойство неодимовых магнитов при малых габаритах создавать магнитное поле достаточной напряженности делает их оптимальными для применения в этой конструкции. Установлены магниты таким образом, что полюса магнитов чередуются, что необходимо для работы микросхемы SS526DT. Внутренняя схема SS526DT, имеющая в своем составе триггер, определяет направление движения благодаря смене полярности магнитного поля, которое создается постоянными магнитами. Чем больше магнитов установлено на диске, тем выше дискретность и, следовательно, увеличивается возможность регистрации медленных перемещений, т.е. чувствительность датчика становится выше. Микросхема SS526DT устанавливается на небольшой печатной плате, соединенной проводами с основной схемой датчика, элементы которой расположены на второй печатной плате большего размера. Перемещение полюсов магнитов происходит вдоль корпуса микросхемы SS526DT. Все элементы заключены в металлический защитный экранирующий кожух.
Все элементы заключены в металлический защитный экранирующий кожух.
Схема электрическая принципиальная
С выхода датчика скорости и направления поступает сигнал, передающий информацию о скорости оборотов с помощью частоты импульсов, а информация о направлении вращения передается с помощью полярности импульсов.
Выходной сигнал:
Благодаря наличию в схеме датчика источника двуполярного напряжения питания выходной сигнал размахом 5 вольт может иметь отрицательную или положительную полярность.
Функциональная схема датчика скорости и направления оборотов:
Электрическая схема преобразует сигнал от датчика Холла в выходной сигнал датчика скорости и направления вращения, обеспечивая достаточную нагрузочную способность по току. Для минимизации помех, воздействующих на кабель импульсного датчика, сопротивление приёмника сигнала должно быть небольшим. Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
Упрощенная схема включения датчика Холла
Логические элементы усиливают сигнал Направление, поступающий от датчика Холла. Логические элементы управляют светодиодами оптронов, один из которых работает на замыкание, а другой на размыкание. При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
На входе принимающего устройства сигнал дешифруется перед измерением частоты. С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
Электрическая схема датчика скорости и направления оборотов
Рассмотренный порядок работы реализован в электрической схеме датчика скорости и направления вращения. Сигнал Направление поступает с выхода D микросхемы, использующей эффект Холла, DA2. Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной. В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и Направление вращения, используя один компонент.
Радиодетали в схеме
Параметры импульсного датчика во многом обуславливают примененные компоненты его электрической схемы. Диапазон изменения напряжения питания, при котором способен работать датчик скорости и направления вращения обуславливает преобразователь напряжения DA1. Верхний предел измерения скорости вращения зависит от быстродействия оптрона VK1. Применение конденсаторов с наименьшим тангенсом угла потерь сочетание конденсаторов с различными типами диэлектрика использование последних разработок в области конденсаторов позволяет добиться наиболее высоких результатов. При чрезмерном увеличении емкости существует опасность “перегрузить” преобразователь напряжения DA1, что приведет к срабатыванию защиты по току в момент подачи питания и схема “не будет подавать признаков жизни”. При выборе типа оптореле VK1 оценивается его быстродействие и частота импульсов, поступающих на вход оптореле. Правильный выбор VK1 позволит уменьшить стоимость датчика. Микросхема DD1 выполняет функцию простейшего усилителя по току и может быть заменена другой микросхемой. Клемма XT1 предназначенная для монтажа на печатную плату, может быть заменена на другой элемент разъемного соединения.
C1…C3 Конденсатор EMR 47 мкФ 50 В ф. Hitano
C4…C6 Конденсатор SMD 0805 2,2 мкФ 16 В
DA1 Преобразователь напряжения TMR 3-1221WI ф. Traco power
DA2 Микросхема SS526DT ф. Honeywell
DD1 Микросхема КР1533ЛН1
R1, R2 Резистор 300 Ом ±5%
R3, R4 Резистор 180 Ом ±5%
VK1 Оптореле 249КП10АР
ХТ1 Клемма LMI 107 203 51
Модифицирование импульсного датчика в зависимости от скорости вращения
Для различных применений требуется измерять различные диапазоны изменения скорости вращения, меняются требования к скорости определения смены направления вращения. Возможно применение датчика для скоростей 1 оборот в минуту и менее. При таких скоростях нужно увеличивать количество магнитов на диске, применять магниты с наименьшими габаритами и уменьшать зазор между микросхемой DA2 и плоскостью диска. Если скорости 5000 и более оборотов в минуту количество магнитов можно уменьшить. При этом наибольшая измеряемая скорость ограничена только конструктивными особенностями датчика. При уменьшении количества магнитов уменьшаются требования к наивысшей рабочей частоте компонентов схемы.
Источник: http://mikrocxema.ru/
Датчики магнитного поля. Датчики Холла в схемах на МК
Сущность эффекта, открытого в 1879 г. американским физиком Э. Холлом, заключается в появлении разности потенциалов между гранями полупроводниковой пластины, через которую протекает ток и на которую воздействует перпендикулярное магнитное поле. Разность потенциалов прямо пропорциональна силе тока и квадрату магнитной индукции.
Эффект Холла широко применяется в бесконтактных датчиках тока. Другое направление — датчики перемещения, в которых элемент Холла крепится к неподвижному шасси, а собственно магнит находится на движущейся части исследуемого объекта. Поскольку выходной сигнал датчика Холла пропорционален индукции магнитного поля, а не скорости его изменения, это даёт серьёзное преимущество в точности по сравнению с аналогичными по назначению индуктивными датчиками.
Магниточувствительные элементы, использующие эффект Холла, обычно называют «датчиками Холла» (англ. «Hall Sensor»). Различают простые и интегральные датчики Холла. В последних кроме полупроводниковой пластины содержится встроенный усилитель-формирователь. Типовые параметры интегральных датчиков Холла: напряжение питания 2.5…5 В или 4.5… 18 В, ток потребления 8…20 мА, минимальная регистрируемая магнитная индукция 2… 10 мТл, выходной сигнал — аналоговый (модулированное по амплитуде напряжение) или цифровой (открытый коллектор, КМОП-элемент, импульсы ШИМ).
На Рис. 3.74 а…м показаны схемы подключения датчиков Холла к МК.
Рис. 3.74. Схемы подключения датчиков Холла к МК {начало):
а) датчик Холла DAI имеет выход с открытым коллектором и встроенную схему защиты от замыкания на шину питания. Микросхема УР1101ХП29 реагирует на магнитное поле положительной полярности, УР1101ХП49 — на поле положительной и отрицательной полярности с триггерным эффектом запоминания;
б) диод VD1 защищает вход МК от случайной подачи высокого положительного напряжения. Конденсатор С J снижает помехи, поступающие от датчика Холла по длинным проводам;
в) включение/выключение датчика Холла DAI по сигналам с выхода МК. Датчик реагирует на магнитное поле как положительного, так и отрицательного направления. Замена микросхемы /)/!/- К1116КП2;
Рис. 3.74. Схемы подключения датчиков Холла к МК {продолжение):
г) датчик Холла ?14/ (фирма Ampson Technology) имеет два противофазных выхода. Прямой сигнал поступает на МК, а инверсный — на внешнее исполнительное устройство через выход с открытым коллектором;
д) для усиления сигнала с датчика Холла ?14/ (фирма Allegro MicroSystems) используется ОУ DA2. Резистором RI выставляется начальное напряжение на входе МК, близкое к половине питания. Резистором /?J регулируется усиление/чувствительность;
е) датчик оборотов двигателя бормашины, выполненный на специализированной бескорпусной микросборке DAI, содержащей на подложке датчик Холла. На ОУ DA2 собран двухка- скадный усилитель напряжения (регулируется резистором RW), Резистор /?/ балансирует мостовую схему, находящуюся внутри DAI, что необходимо для начальной калибровки показаний;
ж) подключение датчика Холла DA / (фирма Allegro MicroSystems) к М К через малошумящий ОУ DA2,1 и двухзвенный ФНЧ {R5, С1, R6, С2). Резистором R4 выставляется усиление;
Рис. 3.74. Схемы подключения датчиков Холла к ЫК {окончание):
з) микросхема DA! (фирма Melexis) — это интеллектуальный датчик магнитного поля с внутренним DSP и со своей системой команд. По-другому микросхему DA! называют «цифровым датчиком Холла». Трёхпроводной интерфейс связи напоминает SPI, но вместо двух отдельных линий MISO и MOSI сделана одна совмещённая линия MISO-MOSI;
w) DA1 — это микросхема датчика Холла, щироко применявщаяся ранее в компьютерных клавиатурах;
к) аналоговый компаратор на микросхеме DA1 (фирма Maxim Integrated Products) обеспечивает крутые фронты сигнала на входе МК. Порог срабатывания определяется делителем /?/, R3\ л) DA! — это микросхема датчика Холла, «изъятая» из компьютерного вентилятора; м) экономичный ОУ на микросхеме Z)/42 (фирма Telefunken) усиливает сигнал сдатчика Холла DAL Транзистор VT1 служит ключом и формирует на выходе прямоугольные импульсы.
Замена датчика Холла (микросхемы) в ручке газа
И все-таки она сломаласьКлеточки 7 мм.
Из-за вибрации и прикосновения магнитов к микросхеме, у нее отломалась сначала 1 ножка — спилив часть корпуса на ее место я припаял гибкую проволочку, заодно наплавил на стопор немного пластика чтоб магнит не прикасался к микрухе. По всей видимости эффект от наплавки был недолгим и магнит снова начал прикасаться к ней.
Микросхема торчала внутрь ручки на собственных ножках никак не закрепленная + из-за люфтов магниты прикасались к ней. Если сказать просто: «думали *опой» — плохо спроектировано.
В общем у микрухи отломалась и вторая ножка. Можно было конечно так-же припаять проволочку, но надеяться на то что микруха удержится на 1 из 3-х ножек, при чем в хлам изношенной глупо, тому я впаял заранее купленную новую микросхему.
Какую микруху надо паять? а вот хрен знает… В качестве микросхемы для ручки газа магазины электровелосипедов предлагают SS49, это линейный датчик Холла. Я конечно пытался заказать его в магазине, но его видимо не было в наличии и продавцы обоих магазинов решили сыграть со мной в детскую игру: «нет в наличии = уходим в полный игнор» т.е. заказ через форму игнорируем, е письма тоже, на телефонные звонки не отвечаем, примерно через 2 недели оба магазина со мной связались, но микросхема уже была куплена на радио базаре… Не та, но похожая SS49E Сравнивая даташиты, я не допер в чем разница. Какая на самом деле микруха стояла в ручке неизвестно, т.к. магниты прикасаясь к корпусу стерли с нее все надписи.
Разумеется я наплавил еще пластика на стопор чтоб магниты к новой микрухе не прикасались.
Данные снятые с родной микросхемы
На новой микросхеме пока не ездил, но работает все четко.
Микросхема вставлена и заклеена
Лишний светодиод на плате индикатора заряда (заклеенный черной лентой) — адаптация индикатора для свинцовой батареи к LiFePO4 батарее на 16 банок, выполняет функцию стабилитрона на 3 В.
21.06.18 Езда в течении нескольких дней показала что все работает нормально, никаких изменений в управлении нет.
Единственная разница это максимальное напряжение в крайнем положении ручки, у родной микросхемы оно 3.6 В у новой 3.8 В но это ожидаемый результат т.к. был отражен в даташите на микросхему, а именно была указана большая чувствительность мВ на Гаусс.
Индикатор заряда это измеритель находящийся прямо в ручке газа, каждый светодиод зажигается собственным детектором напряжения на микрухе Tl431 (управляемый стабилитрон). Т.е. чтоб перенастроить напряжение погасания светодиодов, потребовалось-бы перенастраивать напряжения срабатывания каждой микросхемы или поставить общий стабилитрон перед всей схемой, что я и сделал. Перенастраивать индикатор нужно было т.к. рабочая точка LiFePO4 батареи на 16 банок 51.2 В а у свинца 48.0 В; нижнее рабочее напряжение свинца 44.0 В, а у LiFePO4 45.0 В; важнее то, что большая часть заряда свинца находится между 46 и 48 В а у LiFePO4 между 48 и 50.5 В. Большая часть — означает «почти весь заряд, который можно снять на большой мощности» Т.е. исходная схема начинала гасить первый светодиод только когда батарея сильно разряжена, и то под большой нагрузкой.
Светодиод в качестве стабилитрона: интересно то что светодиод обладает даже большей стабильностью прямого напряжения чем стабилитрон на 3.0 или 3.3 В т.е. что советский, что современный стабилитрон, был-бы менее стабильным чем обычный белый светодиод, так у современного была-бы еще проблема с отводом тепла, т.к. он очень маленький.
(PDF) Трехмерное моделирование крестообразного датчика Холла и его схема замещения модель
PROC.
24-я
МЕЖДУНАРОДНАЯ КОНФЕРЕНЦИЯ
ON
MICROELECTRONICS
(MIEL
2004).
VOL
1,
NI $
SERBIA
AND
MONTENEGRO,
16-19
MAY,
2004
3D
Датчик Холла 2
Кросс-симуляция Модель эквивалентной схемыElva
JovanoviC, Tatjana
PeSiC,
Dragan PantiC
Alhlrocr
—
Характеристики
, полный технологический процесс
и электрические характеристики
крестообразный
Датчик Холла
в
, большая часть высокого напряжения
CMOS
Технологияточно смоделирована
в
2D
и 30
с использованием системы
ISE
.Согласованный трехмерный профиль легирования — это, полученный
с помощью интерполяции
, обмен данными между несколькими профилями легирования
20
.
В
для облегчения анализа
из
и
электрическая
цепь
с
датчик Холла,
и
соответствующий эквивалент
модель
перекрестная схема
-образный датчик Холла с регулировкой напряжения
нелинейных резисторов.Наконец, результаты, полученные с помощью
3D
электрических характеристик
моделирования
с использованием инструмента ISE
DESSIS
и
анализа эквивалентных цепей с использованием программы SPICE, совпадают.
1.
ВВЕДЕНИЕ
Устройства на эффекте Холла включены во многие продукты,
от компьютеров до швейных машин, от автомобилей
до
самолетов и от станков до медицинского оборудования
[1,2].
Идея реализовать высокочувствительные датчики Холла
в
Стандарт
Технология объемного КМОП снижает производственные затраты
и открывает поле
–
интегрирует устройство Холла с электроникой
на одном кристалле
[3,4].
Для упрощения анализа
из
.
электрическая цепь со встроенными датчиками Холла,
это
удобно представить устройство Холла
соответствующая
модель эквивалентной схемы
[5,6],
которые должны включают
важных физических эффектов, влияние материалов и
технологических параметров
на
электрических характеристик.
Наконец, модель будет совместима с доступными программными пакетами
для анализа цепей, такими как
как
SPICE.
Крестообразный датчик Холла в высоковольтном корпусе
CMOS
Технологияпринадлежит к большой группе
из
устройств Холла, которые из-за геометрии
—
не могут быть смоделированы без включения 3-го измерения
. Использование
из
ID или 2D аналитических профилей для определения
3D профиля распределения легирования
в
области моделирования, как
суррогат для моделирования процессов, сильно ухудшает точность результатов моделирования
, в то время как
на
с другой стороны,
реальное 3D-моделирование процесса представляет собой
довольно сложную задачу.
В
в этой статье, DIP
(Пакет интерполяции данных)
программный инструмент,
часть
ISE
Программный пакет TCAD
[7],
предназначен для обмена наборами данных между сетками
различных размеров и типов используется для объединения двух- и трехмерных профилей легирования
в одну согласованную трехмерную модель.
Программа DESSIS
[7],
одна из ведущих доступных
симуляторов устройств обрабатывает lD,
2D
и 3D геометрии,
Авторы с кафедры
из
Микроэлектроника, факультет
of
Electronic Engineering, University
of
NiS, Bcogradska
14,
18000
Nii,
Serbia
&
Montenegro, E-mail: elva @ elfak.ni.ac.yu,
tatjana @ elf; ik.ni.ac.yu,
моделирование смешанных схем с компактными моделями и
числовыми устройствами,
— это
используется для истинного 3D моделирования устройства Холла
. Этот программный инструмент содержит
и
полный набор
физических моделей, которые могут быть применены для моделирования магнитного поля
датчиков. Полученные результаты моделирования устройства
используются для получения
понимания физических эффектов
и параметров
с тензорными характеристиками, понимания того, как работает крестообразный датчик Холла
, оптимизации геометрии устройства,
и извлечения его эквивалента. параметры модели схемы.
Наконец, предлагается модель эквивалентной схемы крестообразного датчика Холла
с традиционными схемными компонентами и нелинейным резистором управления напряжением
.
Сравнение
с
представлены результаты моделирования, полученные с помощью истинного
3D
устройства, имитирующего крестообразный датчик Холла с использованием программного пакета
ISE
TCAD и анализа эквивалентных схем
с использованием программы SPICE.Особое внимание
было уделено
эффектам, касающимся нелинейности напряжения и параметрам чувствительности по току
, как одной
из
наиболее важной проблеме
, когда речь идет о датчиках
до
Холла
.
I /
(Depletion
Layer
I
P-Substrate
Рис.
I
Крестообразное устройство Холла в массе Технология CMOS
(общий вид и вид со средним сечением) 9000
[I].
11.
КРЕСТООБРАЗНЫЙ
ЗАЛ
ДАТЧИК
Крестообразный датчик Холла четырехконтактный,
90 ‘
вращение
симметричное устройство (см. Рис.
I)
чувствительное к магнитному полю
перпендикулярно
к
поверхности устройства
. Его активная область
слабо легированная n-луночная область изолирована от p-типа
0-7803-8166-1 / 04 / $ 17.00
0
2004
IEEE
235
Датчики на эффекте Холла | Аллегро Микросистемс
Датчики на эффекте Холла
Автор: Шон Милано, Allegro MicroSystems
Скачать PDF, версия
Абстрактные
Allegro MicroSystems — мировой лидер в разработке, производстве и маркетинге высокопроизводительных интегральных схем датчика Холла.Эта статья дает общее представление об эффекте Холла и о том, как Allegro разрабатывает и реализует технологию Холла в корпусных полупроводниковых монолитных интегральных схемах.
Принципы эффекта Холла
Эффект Холла назван в честь Эдвина Холла, который в 1879 году обнаружил, что потенциал напряжения возникает на токопроводящей проводящей пластине, когда магнитное поле проходит через пластину в направлении, перпендикулярном плоскости пластины, как показано на нижнем рисунке. панель рисунка 1.
Фундаментальным физическим принципом, лежащим в основе эффекта Холла, является сила Лоренца, которая проиллюстрирована на верхней панели рисунка 1. Когда электрон движется в направлении v, перпендикулярном приложенному магнитному полю, B, он испытывает силу F , сила Лоренца, нормальная как к приложенному полю, так и к току.
Рис. 1. Эффект Холла и сила Лоренца. Синие стрелки B обозначают магнитное поле, проходящее перпендикулярно проводящей пластине.
В ответ на эту силу электроны движутся по изогнутой траектории вдоль проводника, и на пластине возникает общий заряд и, следовательно, напряжение. Это напряжение Холла, V H , подчиняется приведенной ниже формуле, которая показывает, что V H пропорционально напряженности приложенного поля, и что полярность V H определяется направлением, северным или южным, приложенное магнитное поле. Благодаря этому свойству эффект Холла используется в качестве магнитного датчика.
где:
- V H — напряжение Холла на проводящей пластине,
- I — ток, проходящий через пластину,
- q — величина заряда носителей заряда,
- ρn — количество носителей заряда в единице объема, а
- т — толщина листа.
Полупроводниковые интегральные схемы Allegro содержат элемент Холла, поскольку эффект Холла применяется как к проводящим пластинам, так и к полупроводниковым пластинам.Используя эффект Холла в полностью интегрированной монолитной ИС, можно измерить напряженность магнитного поля и создать широкий спектр интегральных схем с эффектом Холла для множества различных приложений.
Переключатель Allegro Hall активируется положительным магнитным полем, создаваемым южным полюсом. Положительное поле включает выходной транзистор и соединяет выход с GND, действуя как устройство с активным низким уровнем.
Поле, необходимое для активации устройства и включения выходного транзистора, называется магнитной рабочей точкой и обозначается аббревиатурой B OP .Когда поле убирается, выходной транзистор выключается. Поле, необходимое для выключения устройства после его активации, называется точкой магнитного срабатывания, или B RP . Разница между B OP и B RP называется гистерезисом и используется для предотвращения дребезга переключения из-за шума.
Allegro также производит магнитные защелки и линейные устройства. Магнитные защелки включаются южным полюсом (B OP ) и выключаются северным полюсом (B RP ).Требование северного полюса для деактивации защелки отделяет защелки от простых переключателей. Поскольку они не выключаются при удалении поля, они «фиксируют» вывод в текущем состоянии до тех пор, пока не будет применено противоположное поле. Защелки используются для определения вращающихся магнитов для переключения двигателя или измерения скорости.
Линейные устройства имеют аналоговый выход и используются для определения линейного положения в линейных энкодерах, таких как автомобильные датчики положения педали газа. Они имеют логометрическое выходное напряжение, которое при отсутствии поля номинально составляет В CC /2.При наличии южного полюса выход будет двигаться в направлении V CC , а при наличии северного полюса выход будет двигаться в направлении GND. Allegro предлагает широкий ассортимент переключателей Холла, защелок и линейных устройств, подходящих для самых разных применений. См. Руководства по выбору продукции Allegro: ИС магнитных датчиков линейного и углового положения, ИС магнитных цифровых датчиков положения, ИС датчиков тока на основе эффекта Холла и ИС магнитных датчиков скорости.
Использование эффекта Холла
Интегральные схемы (IC) Allegro с эффектом Холлаиспользуют эффект Холла, объединяя элемент Холла с другими схемами, такими как операционные усилители и компараторы, для создания магнитно-активируемых переключателей и аналоговых выходных устройств.Простой переключатель Холла, такой как открытое устройство NMOS, показанное на рисунке 2, может использоваться для определения наличия или отсутствия магнита и реагировать с помощью цифрового выхода.
Рис. 2. Блок-схема простого переключателя на эффекте Холла IC
Интегральные схемы — это электронные структуры с большим количеством элементов схемы с высокой плотностью, рассматриваемые как единый блок. Элементы схемы включают в себя активные компоненты, такие как транзисторы и диоды, а также пассивные компоненты, такие как резисторы, конденсаторы и катушки индуктивности.Эти компоненты соединены между собой металлом, обычно алюминием, для создания более сложных операционных усилителей и компараторов устройства. Переключатель Холла на рисунке 2 используется для простой иллюстрации, но эти компоненты используются во всех устройствах Allegro даже для самых сложных ИС. Элемент Холла на рисунке 2 показан в виде квадратной рамки с буквой «X». Его выходной сигнал усиливается, подается на компаратор, а затем на открытый цифровой выход NMOS. Allegro также производит ИС Холла с двумя элементами Холла для измерения дифференциальных магнитных полей и даже тремя элементами Холла для определения направления движущихся ферромагнитных целей.Какой бы сложной ни была топология сенсора, все компоненты изготавливаются на тонкой подложке из полупроводникового материала и на ней.
Структура ИС Холла
Устройства Allegro производятся на кремниевых подложках путем легирования непосредственно в кремний различными материалами для создания областей носителей n-типа (электроны) или p-типа (электронные дырки). Эти области материала n-типа и p-типа сформированы в геометрические формы, которые составляют активный и пассивный компоненты интегральной схемы, включая элемент Холла, и соединены вместе путем нанесения металла на геометрические формы.Таким образом, активный и пассивный компоненты электрически соединены друг с другом. Поскольку требуемые геометрические размеры очень малы, в диапазоне микрон, а иногда и меньше, плотность схемы чрезвычайно высока, что позволяет создавать сложные схемы на очень небольшой площади кремния.
Тот факт, что все активные и пассивные элементы выращены внутри подложки или нанесены на кремний, делает их неотделимыми от кремния и действительно идентифицирует их как монолитные интегральные схемы.На рисунке 3 показано, как элемент Холла интегрирован в Allegro IC. Это просто область легированного кремния, которая создает пластину n-типа, которая будет проводить ток.
Рисунок 3. Поперечное сечение одиночного элемента Холла; эпи-резистор N-типа контактирует в каждом из четырех углов.
Как упоминалось ранее, когда ток протекает от одного угла пластины к противоположному углу, напряжение Холла будет развиваться через два других угла пластины в присутствии перпендикулярного магнитного поля.Напряжение Холла будет равно нулю, когда поле не приложено. Аналогичным образом более сложные геометрические формы образуют активные компоненты, такие как структуры транзисторов NPN или NMOS. На рисунке 4 показаны поперечные сечения как NPN-, так и PMOS-транзисторов.
Рис. 4. Поперечные сечения PMOS (вверху) и BJT-транзистора n NPN (внизу)
Для повышения эффективности производства эти схемы выращиваются в подложке, пока она еще находится в форме большой пластины. Цепи повторяются в виде ряда строк и столбцов, которые можно распилить на отдельные кристаллы или «чипы», как показано на рисунке 5.
Рис. 5. Кремниевая пластина, пропиленная в кристалле после нанесения схемы IC
Единственное устройство на ИС с датчиком Холла Allegro можно увидеть на рисунке 6. Это простой переключатель с функциональной блок-схемой, показанной на рисунке 2. Все схемы включены в ИС, включая элемент Холла, который можно увидеть. в виде красного квадрата в середине микросхемы, а также схемы усилителя и защитные диоды, а также многочисленные резисторы и конденсаторы, необходимые для реализации функциональности устройства.
Рис. 6. Микросхема Single Hall IC
Упаковка для устройств Холла
После распиливания рядов и столбцов кремниевых пластин на отдельные кристаллы, кристаллы упаковываются для индивидуальной продажи. Готовый корпус, один из многих возможных стилей, показан на рис. 7. Кристалл виден внутри корпуса, установленный на медной матрице. Контакт с медными выводами осуществляется посредством золотой проволоки, соединяющей металлические контактные площадки на поверхности кристалла с электрически изолированными выводами корпуса.Затем упаковку инкапсулируют или формуют поверх пластика, чтобы защитить матрицу от повреждений.
Рис. 7. Типичный полный комплект устройства Холла, показывающий смонтированную матрицу и подключения проводов к контактам.
Корпус, показанный на рисунке 7, представляет собой простой переключатель, показанный на рисунке 2, с VCC, GND и выходными выводами в миниатюрном 3-контактном однорядном корпусе (SIP). Другие пакеты можно увидеть на рисунке 8 и включают в себя масштабный пакет микросхемы на уровне пластины (CSP), SOT23W, MLP, 3-контактный UA-корпус SIP и 4-контактный K-корпус SIP.
Рис. 8. Типовые полные комплекты устройств Холла: (A) MLP для поверхностного монтажа и (B) SOT23W, (C) корпус для масштабирования кристалла на уровне пластины (CSP) и монтаж в сквозное отверстие (D) K типа SIP, и (E) UA типа SIP.
AN296065
% PDF-1.4 % 84 0 объект > эндобдж xref 84 79 0000000016 00000 н. 0000002350 00000 н. 0000002469 00000 н. 0000002599 00000 н. 0000002894 00000 н. 0000003428 00000 н. 0000004064 00000 н. 0000004100 00000 н. 0000004149 00000 п. 0000004195 00000 н. 0000004386 00000 п. 0000004566 00000 н. 0000004631 00000 н. 0000007819 00000 п. 0000008837 00000 н. 0000009856 00000 п. 0000010128 00000 п. 0000010477 00000 п. 0000010623 00000 п. 0000010803 00000 п. 0000010868 00000 п. 0000010933 00000 п. 0000013604 00000 п. 0000014489 00000 н. 0000015393 00000 п. 0000022149 00000 п. 0000025842 00000 п. 0000033315 00000 п. 0000034164 00000 п. 0000037954 00000 п. 0000045271 00000 п. 0000046311 00000 п. 0000046824 00000 п. 0000047027 00000 п. 0000047317 00000 п. 0000047371 00000 п. 0000047443 00000 п. 0000047527 00000 п. 0000047619 00000 п. 0000047667 00000 п. 0000047770 00000 п. 0000047818 00000 п. 0000047954 00000 п. 0000048029 00000 п. 0000048077 00000 п. 0000048152 00000 п. 0000048259 00000 н. 0000048307 00000 п. 0000048407 00000 п. 0000048455 00000 п. 0000048557 00000 п. 0000048605 00000 п. 0000048708 00000 п. 0000048756 00000 п. 0000048882 00000 н. 0000048962 00000 н. 0000049010 00000 п. 0000049092 00000 п. 0000049193 00000 п. 0000049240 00000 п. 0000049374 00000 п. 0000049454 00000 п. 0000049501 00000 п. 0000049581 00000 п. 0000049674 00000 п. 0000049722 00000 п. 0000049769 00000 п. 0000049816 00000 п. 0000049864 00000 п. 0000049958 00000 н. 0000050006 00000 п. 0000050054 00000 п. 0000050102 00000 п. 0000050197 00000 п. 0000050245 00000 п. 0000050339 00000 п. 0000050387 00000 п. 0000050435 00000 п. 0000001876 00000 н. трейлер ] >> startxref 0 %% EOF 162 0 объект > поток xb«f«?
Патент США на датчик угла поворота вала на 360 градусов и дистанционную систему индикации с использованием двухосной магниторезистивной микросхемы Патент (Патент №6326781, выданный 4 декабря 2001 г.)
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ1.Область изобретения
Настоящее изобретение в целом относится к системе измерения и индикации углового положения, а более конкретно, к системе, которая включает в себя бесконтактное устройство для определения угла поворота вращающегося вала на 360 градусов, используя магниторезистивные датчики, работающие в нерабочем состоянии. -насыщающее магнитное поле, которое приспособлено для выработки кондиционированных периодических аналоговых выходных сигналов, подходящих для непосредственного управления удаленным электромагнитным индикатором положения вала или относительно простым электронным устройством индикации положения на все 360 градусов вращения вала.
2. Описание предшествующего уровня техники
Определение углового положения для вращения на 360 градусов исторически выполнялось с использованием потенциометров, синхронизаторов или резольверов, которые включают в себя устройства электрических контактов с низкой надежностью, такие как электрические щетки и дворники. Эти устройства обычно взаимодействуют с устройствами индикации удаленного положения, которые также включают потенциометры, синхронизаторы и резольверы.
Потребность в более надежном измерении угла вала для таких применений, как управляющие поверхности самолетов и приводы с замкнутым контуром, привела к применению вращающихся переменных дифференциальных трансформаторов и абсолютных энкодеров, которые не полагаются на схему электрических контактов с низкой надежностью.Однако, к сожалению, эти датчики значительно дороже и требуют сложной и дорогой электроники демодуляции для получения пригодных для использования выходных сигналов.
В результате усилия по созданию более дешевого, но надежного и точного альтернативного устройства для измерения углового положения вращающегося вала включали попытки использовать датчики, такие как датчики эффекта Холла или магниторезистивные (MR) датчики, которые способны генерировать электрический выходной сигнал при воздействии вращающегося магнитного поля.
В датчиках на эффекте Холлаиспользуется токопроводящая полупроводниковая мембрана для генерирования низкого напряжения, перпендикулярного направлению тока, когда они подвергаются воздействию магнитного поля, нормального к поверхности мембраны. Большинство устройств на эффекте Холла являются цифровыми по своей природе и используются для измерения скорости вращения вала или возрастающего углового положения с устройствами на эффекте Холла, действующими как переключатели или генераторы импульсов. См., Например, Kajimoto et al., US Pat. № 5,574,364. Некоторые устройства используют датчики Холла для обеспечения линейного аналогового выхода в ограниченном диапазоне.Сложные ферромагнитные структуры требуются для максимального увеличения линейного диапазона, который был увеличен примерно до 80 градусов для варианта осуществления, предложенного в Luetzow, патенте США No. № 5,444,369. PCT / EP 98/03149, опубликовано 3 декабря 1998 г., Int. Паб. В WO 98/54547 раскрывается устройство, в котором используются четыре отдельных датчика на эффекте Холла, аккуратно расположенные по диагоналям небольшого квадрата под однородным вращающимся магнитным полем, чтобы обеспечить уникальные комбинации выходных сигналов при вращении на 360 градусов. В этом случае каждый датчик на эффекте Холла обеспечивает выходное напряжение, пропорциональное магнитному потоку, который зависит от силы магнита и расстояния от магнита до датчика, и подход, подобный EP 0 217 478 B1 (обсуждается ниже) для определения угла вращения.Когда диагонально противоположные датчики используются для создания дифференциальных сигналов, как предлагается, индивидуальные характеристики датчиков на эффекте Холла должны быть согласованы друг с другом, и они должны быть расположены и ориентированы очень точно по отношению друг к другу и к вращающемуся магнитному полю. Использование ферромагнитного ярма в предпочтительных вариантах осуществления для выравнивания магнитного поля по датчикам приводит к дополнительному гистерезису в выходных сигналах.
В магниторезистивных датчикахиспользуется элемент, сопротивление которого изменяется в присутствии изменяющегося внешнего магнитного поля.Применительно к обнаружению вращающегося магнитного поля MR-датчики обычно работают в насыщающем магнитном поле. Магнитное насыщение подавляет эффекты изменений напряженности магнитного поля и внешних магнитных помех (по крайней мере, ниже уровня, который может привести к развитию ненасыщающего поля на датчике), чтобы гарантировать, что только вращательное изменение направления воспринимаемого магнитного поля вызывает изменение сопротивления в измерительном элементе MR.
Для определения углового положения вращения вала приблизительно на 120 градусов или менее традиционный подход, хорошо известный и задокументированный в технической литературе, заключается в использовании по существу линейного участка синусоидальной выходной кривой.Однако применение MR-датчиков к точному, но относительно простому и недорогому устройству для измерения вращения на 360 градусов оказалось труднее, в первую очередь из-за того, что такие датчики по своей природе ограничены обнаружением поворота только на 180 градусов перед амплитуда синусоидального выходного сигнала повторяется.
Изучение предшествующего уровня техники иллюстрирует несколько способов, пытающихся разработать устройство MR-датчика, адаптированное для определения направления изменяющегося магнитного поля для разработки подходящей линейной зависимости между выходным сигналом датчика и угловым вращением на 360 градусов.Однако такое устройство предшествующего уровня техники имеет тенденцию быть относительно сложным, чувствительным к производственным допускам или трудностям и / или относительно высокой стоимостью.
В некоторых предшествующих устройствах MR-датчиков используются магниторезистивные датчики, расположенные под углом, чтобы определять чередующиеся магнитные полюса по окружности вала для определения углового положения или вращения вала. Однако такой подход является относительно сложным и дорогостоящим, поскольку системы являются цифровыми по своей природе и обычно требуют генерации сигнала для входа датчика и счетчиков импульсов для выработки подходящего выходного сигнала.См., Например, Kajimoto et al., US Pat. №5574364 и Suzuki et al., Патент США. № 4,791,366.
В альтернативных вариантах расположения MR-датчики размещаются в плоскости, отстоящей от вращающегося магнитного поля и параллельно ему, например, создаваемого магнитом, расположенным на конце вращающегося вала, и в по существу однородной части магнитного поля. В EP 0217478 B1, выданном 24 июля 1991 г., используются два чувствительных элемента, снабженных синусоидальными входами, сдвинутыми по фазе на 90 градусов, для генерирования синусоидальных выходных напряжений с фазовым сдвигом 90 градусов, которые затем объединяются электронным или цифровым способом и обрабатываются для определения угла. вала.Muth et al., Патент США В патенте США № 5602471, опубликованном 11 февраля 1997 г., предлагается использовать электронную схему для создания семейства кривых синусоидальной формы, а затем для создания семейства перекрывающихся линейных характеристик линейного изменения (извлеченных из линейных участков синусоидальных кривых) из при этом возникает линейная зависимость между выходным сигналом датчика и угловым положением более 360 градусов. Andrä et al., Патент США. В US 5796249 раскрыта компоновка по меньшей мере трех датчиков MR, по меньшей мере один из которых окружен электромагнитной катушкой, питаемой переменным или импульсным током, для обеспечения дополнительной информации о направлении, необходимой для определения углового положения на 360 градусов, и для повторного использования. сформировать естественную синусоидальную кривую выходного сигнала для увеличения линейного рабочего диапазона.К сожалению, каждый из них, а также другие связанные датчики предшествующего уровня техники, требуют дополнительных сенсорных элементов, добавления электромагнитной катушки и / или дополнительных генераторов сигналов, схемы управления и сложной выходной электроники, чтобы преодолеть ограничение датчика уникальным выходным сигналом. через только 180 градусов вращения.
Кроме того, предшествующие устройства бесконтактного считывания, в том числе упомянутые выше, обычно адаптированы для обеспечения сигнала (сигналов) индикации положения в форме электронного или цифрового сигнала, который необходимо дополнительно обрабатывать или обрабатывать с помощью дополнительных компонентов, если индикация положения на дистанционном управлении желательно электромеханическое или электромагнитное устройство.
Таким образом, очевидно, что существует давно назревшая потребность в системе измерения и индикации углового положения, включающей относительно простой, но надежный и точный бесконтактный датчик, приспособленный для определения вращения на 360 градусов и обеспечения однозначного выходного сигнала. или сигналы, подходящие для использования для индикации измеренного углового положения с помощью относительно простого, но надежного и предпочтительно бесконтактного электромагнитного или электронного устройства индикации положения на все 360 градусов вращения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯОбщая цель настоящего изобретения состоит в том, чтобы предоставить новую и улучшенную высоконадежную, но при этом относительно простую систему измерения и индикации положения вала на 360 градусов, содержащую бесконтактный датчик положения на 360 градусов, который выдает кондиционированные аналоговые выходные сигналы, подходящие для прямого управления удаленным устройство электромагнитной индикации положения, или которым можно управлять в соответствии с относительно простым алгоритмом электронной индикации положения вала.
Подробная цель заключается в достижении вышеизложенного путем предоставления датчика положения, оснащенного двухосным магниторезистивным датчиком, снабженным ненасыщающимся магнитным полем, которое вращается вместе с валом, и простой электронной схемы для согласования выходного сигнала с магниторезистивного датчика для получения пара напряжений, имеющих достаточный коэффициент усиления для приведения в действие устройства индикации удаленного положения и имеющих одинаковую пиковую амплитуду и фазовый сдвиг 90 градусов, так что угол вала связан с отношением этих двух напряжений, а более конкретно, равен арктангенсу отношения напряжений.Выходной сигнал датчика положения затем передается на удаленное устройство индикации положения, способное преобразовывать соотношение напряжений в механическую, визуальную или электронную индикацию положения.
Эти и другие цели и преимущества изобретения станут более очевидными из следующего описания, рассматриваемого вместе с прилагаемыми чертежами.
Вкратце, датчик углового положения согласно настоящему изобретению использует двухосный магниторезистивный датчик и двухполюсный магнит, соединенный с вращающимся валом для вращения магнитного поля с валом.Магнит расположен и приспособлен для обеспечения магниторезистивного датчика слабым ненасыщающим магнитным полем однородной интенсивности. Магниторезистивный датчик вырабатывает синусоидальные сигналы напряжения, смещенные на 90 градусов друг относительно друга, в ответ на угловое вращение магнитного поля. Эти сигналы напряжения преобразуются с помощью подстроечных резисторов и операционных усилителей для подстройки напряжений смещения датчика, а также масштабирования и усиления сигналов напряжения для получения требуемых согласованных выходных сигналов датчика, имеющих одинаковую пиковую амплитуду и фазовый сдвиг на 90 градусов.Предпочтительный датчик положения включает устройство для температурной компенсации входного напряжения магниторезистивного датчика и ферромагнитный корпус для защиты магниторезистивного датчика от ошибок, вызывающих влияние внешних магнитных и электромагнитных полей.
Подходящее дистанционное устройство индикации положения согласно предпочтительным вариантам осуществления может быть либо электромагнитным, либо электронным устройством, способным преобразовывать отношение выходных напряжений кондиционированного датчика положения в механическую, визуальную и / или электронную индикацию положения.Соответственно, предпочтительные варианты осуществления предполагают использование измерителя с воздушным сердечником, содержащего пару электромагнитных катушек, возбуждаемых кондиционированными сигналами напряжения для создания результирующего вектора магнитного потока, который отслеживает угловое положение вала на индивидуальной основе, и узел ротора, реагирующий на упомянутый результирующий вектор магнитного потока, чтобы обеспечить визуальную индикацию углового положения положения и вращения вала. Изобретение также предполагает подачу преобразованных выходных сигналов в аналого-цифровые преобразователи и микропроцессор для генерации индикации цифрового сигнала или представления углового положения вала.Затем этот цифровой сигнал может быть передан на блок визуального отображения или другие электронные компоненты для дальнейшей обработки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙРИС. 1 — схематическая диаграмма всего изобретения, показывающая устройство определения углового положения и два альтернативных удаленных устройства индикации углового положения, функционально соединенные с устройством определения положения.
РИС. 2 — вид в разрезе двухосного магниторезистивного датчика положения угла вала, представленного на фиг.1.
РИС. 3 — вид в разрезе по линии 3–3 на фиг. 2.
РИС. 4 — схематическая диаграмма электронной схемы управления, считывания и отображения, подходящей для устройства определения и индикации положения согласно изобретению.
РИС. 5 — графическое представление некоторых усиленных выходных сигналов датчика положения в зависимости от углового положения входного вала датчика.
РИС. 6 — вид в разрезе электромагнитного индикатора положения, представленного на фиг.1 для индикации углового положения входного вала датчика, удаленного от датчика.
РИС. 7 — вид в разрезе по линии 7-7 на фиг. 6.
РИС. 8 — графическое представление вычисленного / отображаемого угла вала в зависимости от фактического угла поворота входного вала датчика.
Хотя изобретение допускает различные модификации и альтернативные конструкции, некоторые проиллюстрированные варианты осуществления показаны на чертежах и будут подробно описаны ниже.Однако следует понимать, что нет намерения ограничивать изобретение конкретными раскрытыми формами, а напротив, намерение состоит в том, чтобы охватить все модификации, альтернативные конструкции и эквиваленты, попадающие в рамки сущности и объема изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯВ целях иллюстрации система измерения и индикации угла 360 градусов в соответствии с настоящим изобретением показана на фиг. 1 в схематическом виде.Вся система включает в себя датчик 1 углового положения вала и удаленную систему 2 индикации положения. Показанная удаленная система 2 индикации включает в себя два альтернативных и независимо работающих варианта осуществления индикации углового положения. Механическая индикация угла обеспечивается электромагнитным измерителем с воздушным сердечником 3 с катушками, размер которых позволяет напрямую управлять электрическим выходным сигналом датчика положения 1. Электронная индикация угла обеспечивается парой аналого-цифровых преобразователей 5, микропроцессором 6, a драйвер 7 дисплея и соответствующий блок 4 цифрового дисплея.
Ссылаясь на фиг. 1 и 2, входной вал 8 датчика механически соединен с внешним вращающимся механизмом (не показан), таким как шарнир исполнительного механизма или шестерня, которая имеет угловую ориентацию, в которой желательно контролировать или управлять. Входной вал вращается по одной оси на паре подходящих подшипников 10, которые установлены в фиксированном корпусе датчика 11. Корпус датчика изготовлен из ферромагнитного материала, чтобы защитить внутренние чувствительные элементы от интерференционных эффектов внешних магнитных полей, таких как те, что создано Землей или передачей энергии высокой энергии.
В соответствии с настоящим изобретением, система измерения угла вала на 360 градусов и удаленной индикации реализована с использованием пары магниторезистивных датчиков 12 для определения изменений углового положения ненасыщающегося вращающегося магнитного поля, которое вращается вместе с входным валом 8. , и для обеспечения электрических выходных сигналов, отношение которых указывает угловое положение входного вала.
При выполнении этого аспекта изобретения постоянный магнит 9 установлен на входном валу 8 симметрично относительно оси вращения вала, при этом магнитные полюса расположены радиально наружу от оси, как показано на фиг.1 и 4, так что поле H магнитного потока (то есть линии магнитного потока), создаваемое магнитом, вращается вместе с валом и обычно перпендикулярно оси вращения вала.
Направление магнитных линий потока H определяется парой магниторезистивных датчиков 12, установленных с их чувствительными осями, перпендикулярными друг другу, в плоскости, параллельной плоскости вращающегося вектора магнитного потока, и расположенных в плоскости для обеспечения гарантии что магнитный поток имеет по существу одинаковую интенсивность и направление через магниторезистивные датчики.В предпочтительных вариантах реализации однородное поле, действующее поперек датчиков, достигается с помощью магнита, длина которого существенно больше, чем длина MR-датчиков, так что площадь поля H магнитного потока, возникающего от вращающегося магнита, существенно больше, чем площадь магнитного поля. магниторезистивные датчики.
Кроме того, магниторезистивные датчики разнесены от магнита 9, чтобы гарантировать интенсивность магнитного потока, которая не будет насыщать датчики. Это позволяет датчикам работать в линейном рабочем диапазоне вход-выход для всех углов входного вала до 360 градусов вращения.С этой целью магнитный шунт 13, сделанный из ферромагнитного материала, может быть подключен между магнитом и входным валом для уменьшения напряженности поля магнитного потока, действующего на магниторезистивные датчики. Шунт позволяет расположить магниторезистивные датчики ближе к магниту без насыщения и, таким образом, уменьшает требуемую длину корпуса 11 датчика и общую длину датчика 1 до длины, меньшей, чем это было бы возможно без шунта.
В предпочтительном варианте используются анизотропные магниторезистивные датчики 12.Анизотропное магнитосопротивление возникает в черных металлах и представляет собой изменение сопротивления в материале, которое возникает, когда магнитное поле прикладывается перпендикулярно направлению тока в тонкой полоске материала. Сопротивление в ферромагнитном материале максимально, когда направление магнитного поля параллельно направлению тока, и минимально, когда магнитное поле перпендикулярно току. Обращаясь к фиг. 4, четыре элемента сопротивления, предпочтительно из пермаллоя (Ni-Fe), электрически сконфигурированы в каждом из двух мостов Уитстона 14 и 15.Четыре элемента сопротивления каждого моста соединены парами на противоположных сторонах прямоугольника или квадрата, выбраны с номинально равным сопротивлением без приложения магнитного поля и подключены к мосту с напряжением питания постоянного тока Vs, которое заставляет ток течь через элементы сопротивления. Приложение поля H магнитного потока к мосту, находящемуся под напряжением, затем вызывает увеличение сопротивления в одной паре противоположных резистивных элементов и уменьшение сопротивления в другой противоположной паре, что приводит к дифференциальному выходному напряжению & Dgr; V от моста.И когда магнитное поле вращается вместе с входным валом 8, получается периодическое дифференциальное выходное напряжение, которое в линейном диапазоне датчика пропорционально напряженности магнитного поля H. Дифференциальное выходное напряжение & Dgr; V1 от моста 14 выражается как:
& Dgr; V1 & equals; H A1 sin & thgr; in & plus; & Dgr; V1 смещение
Если мост 15 ориентирован под углом 90 градусов к мосту 14, дифференциальное выходное напряжение & Dgr; V2 от моста 15 выражается как:
& Dgr; V2 & equals; H A2 cos & thgr; in & plus; & Dgr; V2 смещение
, где A1 и A2 — постоянные амплитуды напряжения для каждого моста, а напряжения смещения & Dgr; V1 offset и & Dgr; V2 смещения являются результатом номинальных различий элементов резистора моста из-за производственных допусков.
В предпочтительном варианте осуществления резистивные элементы в магниторезистивных мостах 14 и 15 изготовлены из Ni-Fe, нанесенного на кремниевую подложку, и размещены в компактном корпусе (ах) 12 микросхем для непосредственного монтажа на печатной плате 16, такой как Выпускается в виде магниторезистивной микросхемы Honeywell HMC 1022 с двумя осями считывания в одном узком корпусе. Линейный рабочий диапазон магнитного поля микросхемы Honeywell составляет ± 6 Гаусс, а корпус — приблизительно 0.150 дюймов в ширину и 0,400 дюйма в длину. Это совместимо с напряженностью поля относительно небольшого шунтированного постоянного магнита, например, длиной примерно 0,5 дюйма, для создания однородного ненасыщающего поля на обоих магниторезистивных датчиках. Микросхема Honeywell также включает в себя планку 17 сброса, которая магнитно связана с магниторезистивными датчиками. Импульс тока через планку сброса выравнивает магнитные области в элементах резистора, чтобы обеспечить максимальную чувствительность датчика независимо от предыдущей истории воздействия магнитного поля.В варианте, показанном на фиг. 4, импульс тока сброса создается одноразовой схемой 18, которая разряжает конденсатор 19 через полевые транзисторы 20 при каждом включении датчика.
Чтобы уменьшить влияние изменения температуры окружающей среды на точность датчика, напряжение питания Vs постоянного тока, подаваемое на магниторезистивные мосты 14, 15, регулируется для создания по существу постоянного тока через элементы резистора независимо от температуры. В частности, усилитель 21 управления током обеспечивает и регулирует напряжение питания Vs в ответ на входное напряжение смещения, подаваемое от регулируемого опорного напряжения и цепи 22 резистивного делителя, за вычетом напряжения обратной связи по току на резисторе 23 измерения температуры.
Кроме того, в соответствии с изобретением датчик положения 1 адаптирован для формирования электрических выходных сигналов (& Dgr; V1 и & Dgr; V2) от магниторезистивных датчиков 12 для обеспечения выходных сигналов датчика, адаптированных для непосредственного управления механическим устройством индикации углового положения, таким как в качестве измерителя 3 с воздушным сердечником и / или для управления другим устройством индикации углового положения, например цифровым дисплеем 7, с очень небольшой дополнительной обработкой сигнала. Более конкретно, датчик 1 положения адаптирован для подачи усиленных, сдвинутых по фазе на 90 градусов сигналов выходного напряжения (V1 и V2), имеющих равные пиковые амплитуды.
При реализации этого аспекта изобретения нулевые напряжения смещения (& Dgr; V1 смещение и & Dgr; V2 смещение) мостов 14 и 15 без приложенного магнитного поля подрезаются с помощью подстроечных резисторов 24. Затем корректируются выходные напряжения моста. усиливается усилителями 25 усиления для обеспечения выходных сигналов достаточной амплитуды и мощности для непосредственного управления измерителем 3 и / или аналого-цифровыми преобразователями 5 без необходимости в дополнительном источнике питания. Коэффициенты усиления усиленного сигнала регулируются резисторами 27 обратной связи, которые подстройки для обеспечения усиленных выходных напряжений V1 и V2 с равными пиковыми амплитудами K.После смещения и подстройки усиления кондиционированные выходные напряжения V1 и V2 датчика 1 угла вала могут быть выражены следующим образом и как показано на фиг. 5:
V1 & равно K sin & thgr; в
V2 & равно; K cos & thgr; в
Из этого очевидно, что угловое положение & thgr; in вала 8 связано с отношением выходных напряжений датчика и может быть получено путем взятия арктангенса отношения условных напряжений:
V1 / V2 & равно; (K sin & thgr; in) / (K cos & thgr; in) & equals; tan & thgr; in
& thgr; in & equals; arctan (V1 / V2)
Таким образом, кондиционированные сигналы V1 и V2 выходного напряжения от датчика 1 могут быть непосредственно использованы и / или дополнительно обработаны согласно относительно простому алгоритму для индикации путем определения и / или отображения углового положения входного вала.
Два альтернативных варианта осуществления для обеспечения индикации угла входного вала & thgr; in от выходных напряжений V1 и V2 датчика представлены на чертежах. Первый вариант осуществления иллюстрирует использование электромагнитного момента, возникающего в результате непосредственного возбуждения пары катушек 26 с выходными напряжениями V1 и V2 датчика для углового смещения указателя положения 33 в соотношении один к одному с угловым вращением входа датчика. вал 8. Как показано на фиг. 1 и 6-7, электромагнитный измеритель 3 включает в себя корпус 28 немагнитной катушки из цветных металлов, который содержит соответствующие полости для пары катушек 26 с проводящим проводом, намотанных вокруг корпуса.Катушки содержат достаточное количество витков для создания электромагнитного поля подходящей силы и сопротивления, совместимого с усилителями усиления датчиков 25. Корпус катушки также содержит средства для крепления пары подшипников 29 ротора и вмещает ротор 30, который перемещается в ответ на электромагнитное воздействие. поля, развитые в катушках. Ротор состоит из двухполюсного постоянного магнита 31, прикрепленного к валу 32 ротора, который поддерживается подшипниками 29. Полюса узла постоянного магнита обращены радиально наружу для создания крутящего момента на роторе, когда полюса не выровнены с векторной суммой. магнитного поля, создаваемого возбуждением катушек.Ротор находится в равновесии, когда полюса постоянного магнита выровнены с векторной суммой магнитных полей от катушек.
Магнитные поля, создаваемые в двух катушках 26 при непосредственном возбуждении катушек выходными напряжениями датчика V1 и V2, могут быть выражены как:
h2 & равно; MN1i1 & равно; MN1V1 / R1
h3 & равно; MN2i2 & равно; MN2V2 / R2
, где нижние индексы 1 и 2 обозначают каждую из двух катушек 26, H — магнитный поток в соответствующей катушке, M — магнитная постоянная, N — количество витков в катушке, i — ток через катушку, а R сопротивление катушки.
Если обе катушки намотаны с одинаковым числом витков и проводом с одинаковым сопротивлением на единицу длины, то N1 равно N2 и R1 равно R2, и:
h2 & равно; MNV1 / R
h3 & равно; MNV2 / R
Подстановка выходного напряжения датчика V1 & equals; K sin & thgr; in и V2 & equals; K cos & thgr; в приводит к появлению следующих векторов магнитного потока в катушках 26:
h2 & равно; (KMN / R) sin & thgr; in
h3 & равно; (KMN / R) cos & thgr; in
Таким образом, направление результирующего вектора магнитного потока, создаваемого возбуждающими катушками 26, равно:
& thgr; out & равно; arctan (h2 / h3) & equals; arctan & lsqb; ((KMN / R) sin & thgr; in) / ((KMN / R) cos & thgr; in) & rsqb;
или:
& thgr; out & equals; arctan (tan & thgr; in) & equals; & thgr; in
Таким образом, результирующий вектор электромагнитного поля от катушек 26 измерителя 3 с воздушным сердечником следует за углом входного вала в угловом отношении один к одному.Поскольку ротор 30 и указатель 33 следуют за результирующим электромагнитным полем, они также отслеживают или повторяют угол входного вала на основе один к одному. Другими словами, измеритель 3 действует для магнитного вычисления и индикации угла вала & thgr; in без необходимости во внешнем источнике электропитания или дополнительном электрическом устройстве. Циферблат или шкала 34, указывающая угол, прикрепленная к корпусу измерителя, обеспечивает фиксированное угловое положение, указывающее точку отсчета для & thgr; in, когда указатель 33 вращается.
Второй вариант осуществления, показанный для индикации угла входного вала & thgr; in, использует электронные средства для управления выходными напряжениями датчика, и, в частности, для вычисления арктангенса выходных напряжений V1 / V2 датчика 1, для отображения угла вала & thgr; in. В этом случае выходные сигналы датчика вводятся в пару аналого-цифровых преобразователей 5 и преобразуются в цифровое число, представляющее их соответствующие амплитуды. Эти числа служат входами для микропроцессора 6, такого как Motorola MC68HC711D3CP2 или аналогичный.Арктангенс отношения этих чисел затем вычисляется микропроцессором с использованием комбинации справочных таблиц, численных вычислений и программного обеспечения в соответствии с традиционными алгоритмами, известными специалистам в данной области техники. Выход микропроцессора — это арктангенс отношения двух входных чисел, который прямо пропорционален углу входного вала & thgr; in. Цифровой выходной сигнал микропроцессора затем масштабируется и преобразуется в соответствующий цифровой формат драйвером дисплея 7, таким как Harris ICM7224IPL или эквивалентным, для управления жидкокристаллическим, светодиодным или другим подходящим цифровым дисплеем 4, который показывает угол входного вала & thgr ; в градусах или других единицах углового смещения.Специалистам в данной области техники будет очевидно, что выходной сигнал микропроцессора также может быть отведен для использования, например, в электронной системе управления для управления углом вала & thgr; in. Преимущественно аналоговый электромагнитный измеритель 3 и электронный цифровой дисплей 4 могут быть предусмотрены и размещены в общем корпусе и требуют только согласованных сигналов напряжения V1 и V2 и напряжения питания постоянного тока, чтобы определять и повторять или указывать угол входного вала. & thgr; дюйм.
Специалистам в данной области техники будет очевидно, что преобразованные выходные сигналы V1 и V2 датчика 1 также могут быть предоставлены в рамках настоящего изобретения другому устройству, способному управлять соотношением напряжений или арктангенсом напряжения. передаточное отношение для указания углового положения вала к такому устройству, например, к компонентам в системе безопасности, адаптированной для контроля положения вала, или системе управления для управления положением вала и / или скоростью с дополнительными вычислениями производной по времени.
Из вышеизложенного будет очевидно, что настоящее изобретение представляет собой новое и улучшенное устройство для определения и индикации углового положения вращающегося вала. Благодаря работе пары магниторезистивных датчиков в однородном, относительно низко рычажном, ненасыщающем магнитном поле, которое вращается вместе с валом, выходные напряжения остаются в линейном рабочем диапазоне магниторезистивного датчика, устраняя источники ошибок и связанные с ними компенсации. аппаратура предварительной угловой чувствительности и индикации.За счет подстройки и усиления этих сигналов выходного напряжения до подходящего уровня, имеющего равные пиковые амплитуды, результирующие сигналы можно напрямую использовать, например, с помощью электромагнитного измерителя 3, или легко манипулировать для использования, например, с помощью электронной системы отображения, для индикации угловое положение вала. Таким образом, настоящее изобретение обеспечивает уникальную, относительно низкую стоимость, но высокую надежность и точное бесконтактное устройство для измерения и индикации углового положения вращающегося вала, ранее недоступное в данной области техники.
5962-01-342-8294 — ЛИНЕЙНАЯ МИКРОСХЕМА, УГС3120ХХ, УГС-3120ХХ,
861
×
Группа 85: Электрические машины и оборудование, их части; Звукозаписывающие и воспроизводящие устройства, устройства записи и воспроизведения телевизионного изображения и звука, а также их части и принадлежности
| Приложение B № и заголовки | Описание товара | Кол-во единиц | ||
|---|---|---|---|---|
| 85.42 | — Схемы электронные интегральные; их части: | |||
| — — Электронные интегральные схемы: | ||||
| 8542.31.0000 | — — — Процессоры и контроллеры, совмещенные или не совмещенные со схемами, преобразователями, логическими схемами , усилители, тактовые и временные схемы или другие схемы | No. | ||
| 8542.32 | — — — Память: | |||
| — — — — Динамическое чтение-запись с произвольным доступом: | ||||
| 8542.32.0015 | — — — — — Не более 1 гигабита | No. | ||
| 8542.32.0023 | — — — — — Более 1 гигабита | No. | ||
| 8542.00 — — — — Статическое чтение и запись с произвольным доступом (SRAM) | No. | |||
| 8542.32.0050 | — — — — Электрически стираемая программируемая постоянная память (EEPROM) | No. | ||
| 8542.32.0060 | — — — — Стираемая (кроме электрически) программируемая постоянная память (EPROM) | № | ||
| 8542.32.0070 | — — — — Другое | № | — — — Усилители | No. |
| 8542.39.0000 | — — — Прочие | No. | ||
| 8542.90.0000 | Детали | X | ||
Электронные микросхемы: A3271551-1, A3271637-1, ACT7220
FSC> FSG 59 — Микросхемы, электрическое оборудование и др.> Электронные микросхемы> A3271551-1 — ACT7220