устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
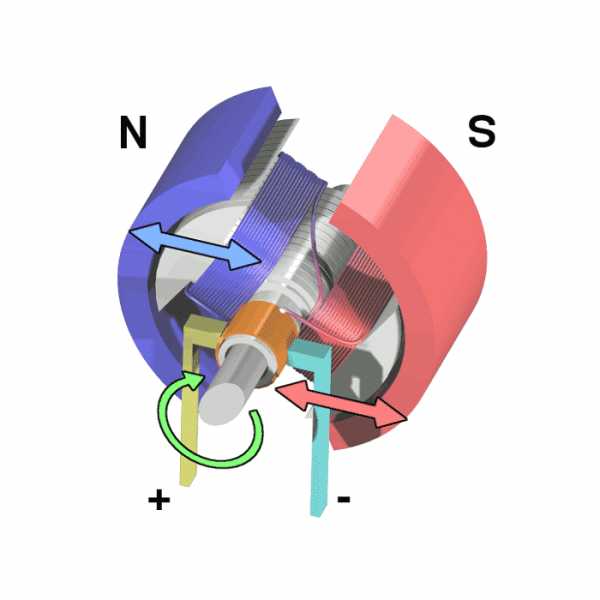 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
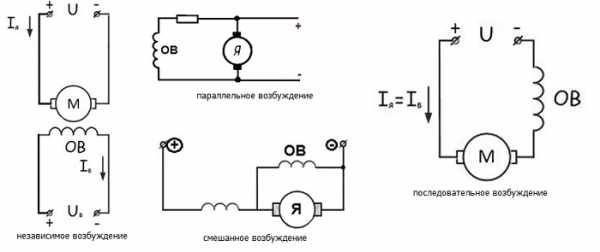 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками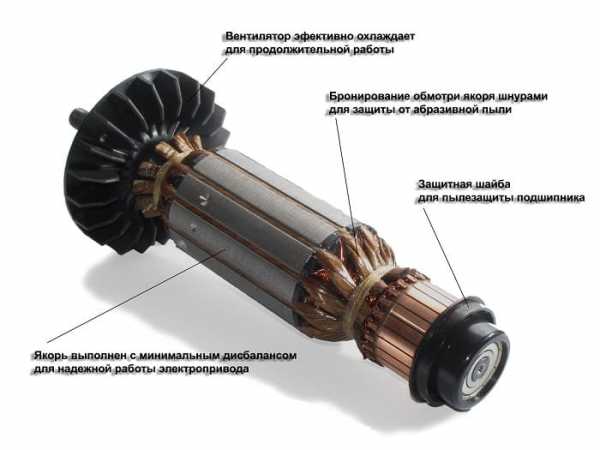 Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмоткамиПодобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
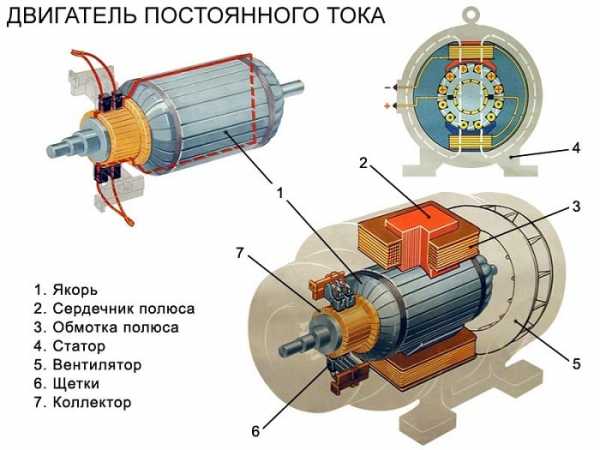 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якоремКоллектор
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
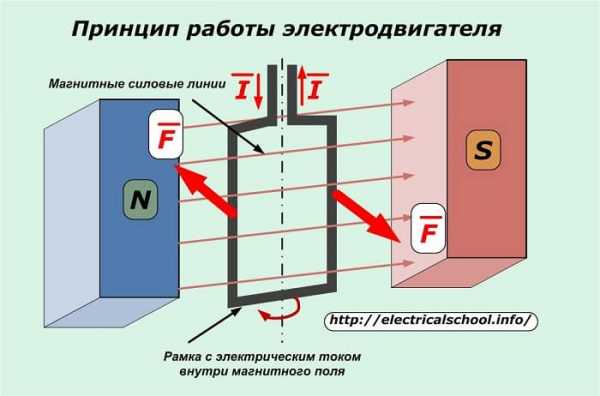 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТЕсли вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
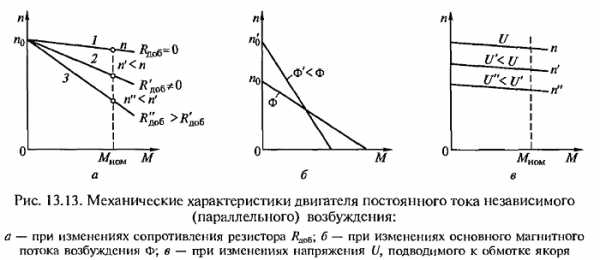 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбужденияРегулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
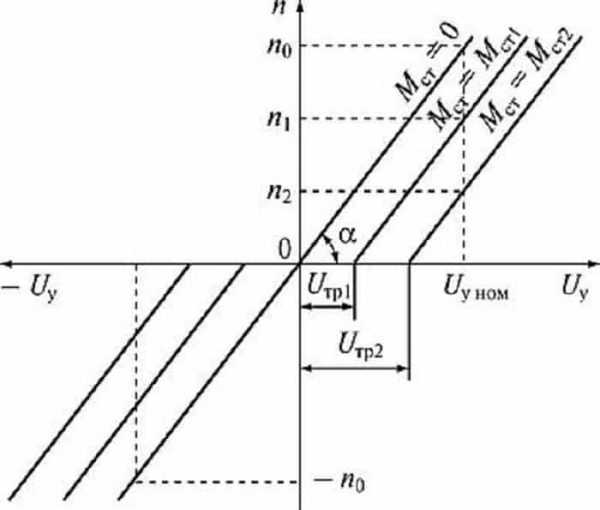 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
www.asutpp.ru
🎓 dc motor ⚗ с английского на русский 🧬
Motor learning — is a “relatively permanent” change, resulting from practice or a novel experience, in the capability for responding (Guthrie, 1952). It often involves improving the smoothness and accuracy of movements and is obviously necessary for complicated… … Wikipedia
Motor a reacción — Saltar a navegación, búsqueda Pruebas de un motor turbofan Pratt Whitney F100 para un F 15 Eagle, Base de la Fuerza Aérea Robins (Georgia, Estados Unidos). El túnel detrás de la tobera reduce el ruido y permite la salida de los gases. La… … Wikipedia Español
Motor Skill Consolidation — represents the process by which motor skills are transformed from an initial fragile state, in which they are especially prone to being disrupted or lost, to a more solid or permanent state.[1] Any newly formed motor skill, such as learning to… … Wikipedia
Motor imagery — is a mental process by which an individual rehearses or simulates a given action. It is widely used in sport training (AKA, Mental Practice of Action), neurological rehabilitation, and has also been employed as a research paradigm in cognitive… … Wikipedia
motor — MOTÓR, OÁRE, motori, oare, s.n., adj. I. s.n. Maşină de forţă care transformă o formă de energie oarecare în energie mecanică (pentru acţionarea altei maşini, a unui vehicul etc.). (În sintagmele) Motor cu plasmă = motor cu reacţie în care… … Dicționar Român
Motor glider — DG 808B 18m self launching See also: glider (sailplane) A motor glider is a fixed wing aircraft that can be flown with or without engine power. The FAI Gliding Commission Sporting Code definition is: A fixed wing aerodyne equipped with a means of … Wikipedia
Motor unit recruitment — is the progressive activation of a muscle by successive recruitment of contractile units (motor units) to accomplish increasing gradations of contractile strength. A motor unit consists of one motor neuron and all of the muscle fibers it… … Wikipedia
Motor FIRE — Motor Fiat FIRE Motor Fiat FIRE detalle. Motor Fire es la … Wikipedia Español
Motor (disambiguation) — Motor is a device that creates motion. It usually refers to an engine of some kind. It may also specifically refer to: Electric motor, a machine that converts electricity into a mechanical motion AC motor, an electric motor that is driven by… … Wikipedia
Motor neurone disease — Classification and external resources spinal diagram ICD 10 G12.2 … Wikipedia
Motor W — Saltar a navegación, búsqueda Un motor Napier Lion. El motor W es una configuración de motor en la cual los bancos de cilindros están ubicados de manera que semejan una letra W, de la misma forma que un motor en V recuerda una letra V. Hay tres… … Wikipedia Español
translate.academic.ru
Двигатель DC 6V Gear Motor – День робота
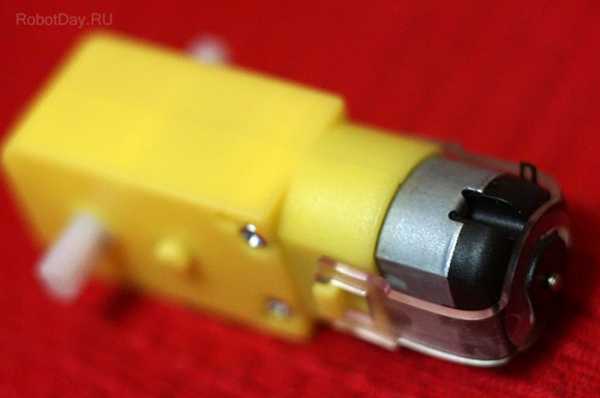
DC 6V Gear Motor
Самый популярный мотор для Arduino, робототехники и различных хобби.
Технические характеристики двигателя DC 6V Gear Motor :
Рабочее напряжение: 3–12 V (вольт) постоянного тока ( рекомендуемое напряжение от 6 до 8 вольт, V )
Передаточное число : 1:120
Ток потребления : 70 mA, мА (при питании 6 вольт, V)
Скорость вращения, предельная : 100 оборотов в минуту (при питании 6 вольт, V)
Силовые характеристики : 4500 g/cm ( 4,5 кг/см )
Размеры мотора : 70,5 мм х 27 мм х 23 мм
Обычно используется от двух до четырех двигателей в самодвижущихся роботах. По одному двигателю на каждое колесо.
Нельзя подключать напрямую к плате Arduino.
Необходимо использовать специальную плату расширения, например, L298N Motor Shield V1.2 .

L298N Motor Shield
Управлять двигателем также можно без специальных плат, с помощью только одной микросхемы, например L293D.
Обсуждение на форуме.
robotday.ru