Выбираем электросистему — AC или DC?
Какой мотор выбрать при заказе электрического транспортного средства — AC или DC?
В привычном нам мире двигателей внутреннего сгорания существует многообразие типов: рядные, V-образные, оппозитные, роторные и т.д. И до сих пор не выбран единственный, «лучший» тип двигателя. Разные типы двигателей существуют для удовлетворения различных потребностей, таких как цена или производительность. Это также применимо и к электромоторам.
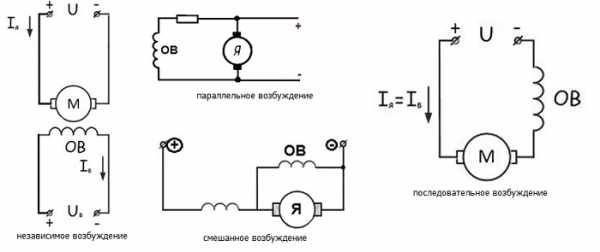
При выборе гольфкара, электробуса или электрогрузовика одним из важнейших технических параметров является тип и мощность мотора. И если с мощностью все понятно – она должна быть достаточной для решения поставленных перед гольфкаром задач, то с типом мотора менее очевидно. На рынке представлены 2 типа – DC моторы (щеточно-коллекторные моторы постоянного тока) и AC моторы (синхронные моторы переменного тока). Иногда можно встретить бесщеточные BLDC моторы, либо асинхронные AC моторы, но это скорее экзотика в случае с низкоскоростным электротранспортом, поэтому не будем добавлять их к сравнению.
DC моторы
Многие производители ЭТС, в том числе и американские, до сих пор предлагают технику с щеточными DC моторами, обычно — в самых недорогих конфигурациях. Попробуем понять стоит ли на этом сэкономить.
Сильные стороны моторов:
• Щеточные DC моторы с последовательным возбуждением обмоток обладают большим крутящим моментом на старте и низких оборотах.
• DC моторы относительно компактны и обладают небольшой массой
• DC мотор прост в управлении, для него требуется более дешевый контроллер
А вот слабые стороны щеточных DC моторов:
• DC-мотор обладает щеточно-коллекторным узлом, который подвержен повышенному износу графитовых щеток и коллектора. Буквально – щетки истираются о коллектор, со временем они требуют замены и имеют свойство ломаться.
• DC-моторы, для долгой службы, необходимо оборудовать устройством плавного пуска мотора, дабы уберечь обмотки ротора от сгорания при пусковом токе
• Обмотки на статорах постоянного тока выделяют много тепла, которое требует сложных технологий для рассеивания, включая оребрение статора, охлаждение маслом и т.д.
AC моторы
AC мотор – изобретение гениального Николы Тесла. На данный момент электромоторы переменного тока потребляют 50% электроэнергии в мире, 90% электромоторов в промышленности – переменного тока. Секрет успеха – простота конструкции: статор, подключенный к 3-фазам, и ротор на подшипниках. Однако на электротранспорте AC моторы получили распространение только в последние 10 лет, давайте разберемся почему.
Чем хороши AC моторы:
• Высокая надежность за счет отсутствия трущихся деталей (щеток и коллектора)
• Более дешевое и редкое техническое обслуживание
• Рекуперативное торможение — накопить энергию от торможения двигателем так же легко, как и потратить энергию при ускорении. Некоторые системы DC также могут это сделать, но они не делают этого так же хорошо, и это всегда делает их более сложными и дорогими.
Минус один – для управления АС мотором электромобиля требуется современный цифровой контроллер-инвертор. Стоимость такого контроллера выше на несколько сотен $, чем у контроллера DC мотора.
Резюмируем:
При эксплуатации AC мотор предпочтительнее. Единственная причина, по которой двигатели переменного тока не вытеснили DC моторы окончательно — это более высокая стоимость приобретения. Однако, надежность и эффективность техники наших клиентов для нас в приоритете. Поэтому мы в MassEV предлагаем к продаже гольфкары, электробусы, электрогрузовики и другую технику с AC моторами, но по цене версий с DC моторами.
massev.ruМоторы постоянного тока [Амперка / Вики]
В данной статье рассматриваются моторы постоянного тока (DC-моторы): их устройство и характеристики.
Понятие мотора
Электромотор — устройство для преобразования электрической энергии в механическую. То есть, устройство на которое надо подать электрический ток, а в замен получить вращение вала мотора.
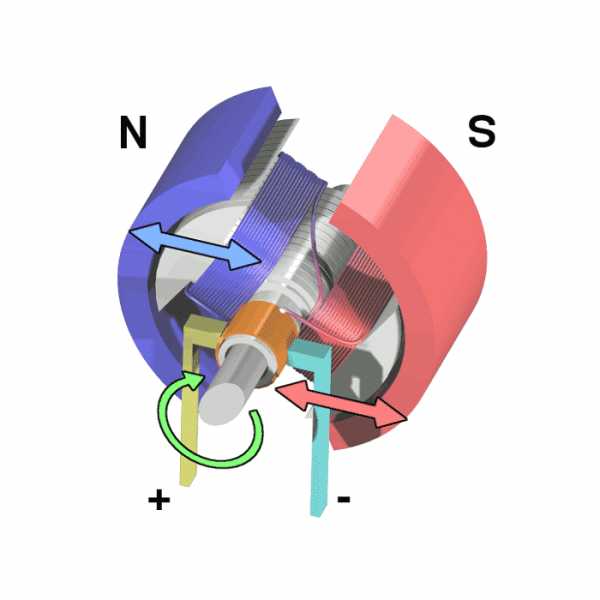
Типичный мотор постоянного тока изображён ниже.
Устройство DC-мотора
Разберёмся как устроен мотор постоянного тока на примере простейшей модели.
У нас есть магнитное поле, генерируемое полюсами магнита и металлическая рамка. На клеммы «+» и «-» подаётся питающее напряжение (Up) мотора и по рамке начинает проходить постоянный электрический ток (Ip). На любой проводник, по которому проходит электрический ток, действует, так называемая, сила Ампера (F
Для большей наглядности, можно посмотреть видео.
Характеристики моторов постоянного тока
Рассмотрим основные характеристики мотора на конкретном примере.
Электрические параметры
Рабочее напряжение — диапазон допустимых питающих напряжений. Чем питающее напряжение будет больше, тем больше будет мощность мотора и скорость вращения. Однако, бесконечно повышать напряжение нельзя, так как с каждым новым вольтом, повышается риск того, что мотор перегорит.
Для наглядности, проведем эксперимент: будем постепенно повышать питающее напряжение мотора, при этом будем контролировать потребляемый ток мультиметром.
Первое, что бросается в глаза — при повышении напряжения от 3 до 9 В, ток изменяется от 40 до 60 мА. Получается, что при увеличении напряжения в 3 раза, ток потребления увеличился всего 2 раза.
Теперь вспомним закон Ома:
Отсюда видно, что, при постоянном сопротивлении провода, ток в цепи должен увеличиваться во столько же раз, во сколько увеличивается напряжение. То есть, обмотка мотора (проволочная рамка) должна иметь переменное сопротивление.
Разберемся с этим парадоксом. Нашу проволочную рамку постоянно пронизывает магнитное поле. Если рамка начинает вращаться, то под действием магнитных сил, в ней возникает напряжение, направленное на противодействие внешних сил, то есть, против внешнего напряжения, которое мы подаем на мотор. Потому, в данном случае, закон Ома надо рассматривать вот так:
,
где E — обратная электродвижущая сила (наведённое магнитным полем напряжение).
Чем быстрее вращается мотор, тем больше значение обратной электродвижущей силы, тем меньше будет потребляемый мотором ток. Поэтому, на холостом ходу мотор всегда потребляет меньший ток, чем под нагрузкой.
Номинальное напряжение — наиболее подходящее напряжение, для питания мотора, при котором мотор способен быстро вращаться, при этом не перегреваясь.
Ток без нагрузки — ток, потребляемый мотором на холостом ходу. Поскольку, на холостом ходу мотор вращается с максимальной скоростью, то потребляемый ток в таком режиме работы будет минимальным для конкретной модели мотора.
Ток при блокировке — ток, потребляемый мотором, при блокировке вала мотора. Данная величина тока потребления будет максимальной. Так как, блокировка вала означает — отсутствие вращения, поэтому будет полностью отсутствовать обратная электродвижущая сила. На практике данную величину можно измерить косвенно, не блокируя вал мотора. Для этого достаточно воспользоваться законом Ома:
U — напряжение питания. Его значение нам известно. R — сопротивление обмотки мотора. Данное значение можно измерить мультиметром, подключив его к клеммам мотора, как к обычному резистору.
Например, для нашего мотора измерим сопротивление обмотки R = 9.9 Ом. При напряжении питания 6 В, получаем:
Механические параметры
Диаметр выходного вала — диаметр подвижной оси мотора, которая совершает вращение.
Передача — полная аналогия с автомобилем. Внутри мотора установлена группа шестеренок, благодаря которым, можно, в известном соотношении, снизить скорость вращения вала мотора, но, при этом, увеличить его выходную мощность.
Скорость без нагрузки — скорость вращения вала мотора (количество оборотов в минуту) на холостом ходу.
Крутящий момент или
В нашем случае данная величина является произведением двух параметров: расстояние от оси мотора до точки прикрепления груза (см) и усилие (кг). Если вы собираете, например, дрель, то данная величина не должна вас сильно беспокоить. Однако, если вы хотите прикрепить к мотору втулку на вал, то надо помнить, что при увеличении диаметра втулки уменьшается максимальное усилие, которое может обеспечить мотор.
wiki.amperka.ru
Безщёточные микромоторы постоянного тока, smoovy® Technology, Faulhaber
|
|
Тонкие безщёточные DC-моторы – penny-motor® Technology, Faulhaber
|
|
Точные DC-Микромоторы, Faulhaber
|
|
| DC-мотор-редукторы, BühlerВ ассортименте компании Bühler широкий выбор щеточных двигателей с постоянным датчиком магнита. Многие двигатели поставляются вместе с дифференциалом. Самые маленькие модели диаметром до 31 мм оснащены подшипником скольжения. Номинальное напряжение двигателей 6,12,18 или 24 В. Диапазон мощности 4…95 Вт, скорость вращения варьируется от 3000 до 5000 об./мин. Многие двигатели поставляются вместе с дифференциалом. Номинальные моменты двигаются в диапазоне 45 мНм…5 Нм, номинальная скорость 1…1000 об./мин. |
|
| DC-мотор-редукторы, Servo Japan Servo Широкий выбор двигателей 12 и 24В и зубчатых передаточных механизмов, которые можно заказать отдельно. Следовательно, с помощью одного двигателя достигается широкий диапазон скорости.
|
|
| DC-мотор-редукторы, ZeitlaufВ двигателях Zeitlauf двигатель можно выбрать по необходимости. Для таких двигателей типичен тихий и ровный ход. Передачи могут быть короткие или длинные, зубчатые, планетарные или угловые. Диаметр 32 -81 мм, срок службы более 5000 часов, точнее 20 радианных минут. В программе склада более 3100 вариантов двигателей с передачей с короткими сроками поставки. В комплектации контроллеры, импульсные датчики и тормоза. Дополнительно большой выбор решений с учетом пожеланий заказчика. |
|
Безщёточные DC-моторы, Faulhaber
|
|
|
Безщеточные двигатели постоянного тока Orientalmotor КАТАЛОГ ПРОДУКЦИИ Orientalmotor Двигатели небольшого размера, очень мощные, быстрые, широкий диапазон регулировки скорости. Крутящий момент ровный как на малых, так и на больших скоростях. Доступны типы AC и DC. Серия BLF
|
|
Серия BLU
|
|
Серия BLH
|
|
| Безщёточные DC-моторы, Nidec-Servo Серия FHD — 24 В (20 Вт, 40 Вт), 48 В (60 Вт) Электродвигатели серии FHD отличаются небольшим весом и малыми размерами, а их производительность выше в сравнении со стандартными электродвигателями типа FED и FYD.
|
|
Серия FYD, 24 ВПлоские электродвигатели этой серии отличаются лёгкостью конструкции по сравнению со стандартными двигателями переменного тока. Для двигателей BDC серии FYD пригодны такие же редукторы Japan Servo FBN, как и в электродвигателях переменного тока.
|
|
| Серия FED, 24 В (3 Вт, 10 Вт, 30 Вт)Стандартные электродвигатели серии FED с контроллером Palm Mini size (57 x 73 мм). Возможны варианты монтажа контроллера в вертикальном и горизонтальном положениях, а также их совмещение в целях экономии места. | |
|
AC-мотор-редукторы, Orientalmotor Работа двигателей Orientalmotor – AC основана на подключении конденсатора и питании тока от источника. Двигатели AC включают обычный и реверсивный двигатель. Существуют также тормозные двигатели Oriental Motor, двигатели с регулировкой момента и скорости. Защищенные от пыли и влаги двигатели могут использоваться для разных целей. КАТАЛОГ Orientalmotor |
|
Серия World K
|
|
Серия FPW
|
|
AC-мотор-редукторы, WEGШирокий ассортимент одно и трехфазных двигателей с угловой или зубчатой передачей или без них. Двигатели могут быть оснащены теплозащитой, тормозом и аналоговым или цифровым тахогенератором.
Используются в конвейерах, упаковочных аппаратах и строительстве станков. Редукторы с втулочным валом серии FB 30, WEG Структура оснащена поворотными осями для удобства установки в ограниченном пространстве. Глубина установки примерно на 50% меньше в сравнении с обычным зубчатым двигателем. Самый большой момент передаче 30 Н*М. Используется, например, в транспортерах с отдельным моторным приводом.
|
|
| AC-мотор-редукторы, HeidolphШирокий выбор небольших передаточных двигателей AC. Изделия серии Heidrive® компактные, бесшумные и легки в обслуживании. Скорость вращения до 2700 об./мин. Зубчатые передачи, 7 вариантов
Конусная зубчатая передача, 3 варианта
Червячная передача
Область применения: вспомогательные средства для людей с ограниченными возможностями, печатные станки, холодильное оборудование и автомобильная промышленность. |
|
| DC-мотор-редукторы, ZeitlaufВ двигателях Zeitlauf мотор можно выбрать по необходимости. Для двигателей этой фирмы типичен тихий и ровный ход. Передачи могут быть короткими или длинными, зубчатыми, планетарными или угловыми. Диаметр 32 -81 мм, срок службы более 5000 часов, точнее 20 радиальных минут. В программе склада более 3100 вариантов с небольшими сроками поставки. В комплектации электроника, импульсные датчики и тормоза. Широкий ассортимент решений в соответствии с пожеланиями заказчика. |
|
|
Модули линейного перемещения Линейные DC-сервомоторы, QUICKSHAFT® Technology, Faulhaber
|
|
Линейные двигатели OrientalmotorЛинейный механизм Orientalmotor включает двигатель и линейную передачу. Владея необходимыми навыками и опытом в области двигателей, производитель предлагает широкий выбор линейных механизмов разного размера и формы с разными типами двигателей, способами управления и источниками мощности.
|
|
| Линейный двигатель Copley ControlsДвигатель Copley Controls используется для многих целей благодаря широкому спектру свойств. Ровная скорость движения от микрона до 5,5 метров в секунду. Ускорение максимум 50G, остановка — несколько микрон. Движущаяся масса около 20 кг/механизм (механизмов может быть много на одной оси), ходы всегда до 1300 мм. Двигатель бывает трех разных размеров. Размер определяется в соответствии с диаметров магнитного стержня, может быть 11, 25 или 38 мм. Все стационарные механизмы относятся к классу защиты IP67. Можно также заказать готовую систему осей XYZ с усилителями. Copley производит также контроллеры серводвигателей. |
www.energy-gc.ru
Двигатель DC — Все промышленные производители — Видеоролики
Ознакомьтесь с нашими руководствами по покупке
Где купить?
двигатель DC
TF M10W
Мощность: 40 W
Скорость вращения: 1 300 rpm
Больше информации
Где купить?
Больше информации
Где купить?
Мощность: 0,25 kW — 400 kW
Скорость вращения: 1 500, 3 000, 750, 1 000 rpm
Диаметр: 14 mm — 100 mm
Больше информации
Показать другие изделия
ENAG
Где купить?
двигатель DC
jokeFlex Premium Plus
Больше информации
Показать другие изделия
joke Technology
Где купить?
двигатель DC
WIN
Момент: 30, 50, 20 Nm
Мощность: 230 W
Скорость вращения: 12 rpm
Больше информации
Где купить?
Мощность: 0,15 kW — 11 kW
Скорость вращения: 750 rpm — 3 000 rpm
Больше информации
Где купить?
двигатель DC
E series
Момент: 0,7 Nm — 70 Nm
Скорость вращения: 3 000 rpm — 6 000 rpm
Больше информации
ВАШЕ МНЕНИЕ
Ваш ответ был учтен. Спасибо за Вашу помощь.
Средняя оценка: 4.0 / 5 (количество голосов: 479)
С DirectIndustry вы можете: Найти продукцию, подрядчика или распространителя рядом с вами | Найти дистрибьютора рядом с вами | Связаться с производителем для получения информации о расценках или ценового предложения |Просмотреть характеристики и технические спецификации продукции самых известных марок | Просмотреть документацию и каталоги онлайн в формате PDF
* Цены указаны без учета налогов, без стоимости доставки, без учета таможенных пошлин и не включают в себя дополнительные расходы, связанные с установкой или вводом в эксплуатацию. Цены являются ориентировочными и могут меняться в зависимости от страны, цен на сырьевые товары и валютных курсов.
www.directindustry.com.ru
лучшее масло, какой ресурс, количество клапанов, мощность, объем, вес
С 2003 года Scania начинает устанавливать на грузовики моделей P, R, G новые 11-литровые дизели DC11 Euro-3, 340 и 380 л.с. сменившие устаревшие DSC11. Производителем выпускается 4 модификации двигателей Scania DC11: DC1101, DC1102, DC1103 и DC1104. Серия DC11 – это шестицилиндровые рядные двигатели с четырьмя клапанами на каждом цилиндре. Фактический рабочий объем этих ДВС составляет 10,6 л. В них используется электронная система подачи топлива, оптимизирующая расход топлива и уменьшающая количество выбросов.
| Модель | Мощность, л.с. (Об./мин.) | Макс. крутящий момент, Нм (Об./мин.) | Стандарт Евро |
| DC1101 | 340 (1800) | 1600 (1000-1450) | Евро 2 |
| DC1102 | 380 (1800) | 1750 (1080-1500) | Евро 2 |
| DC1103 | 340 (1900) | 1600 (1100-1300) | Евро 3 |
| DC1104 | 380 (1900) | 1800 (1100-1300) | Евро 3 |
Редко можно услышать нарекания в адрес грузовиков этой шведской марки вообще и в адрес двигателей Scania в частности. Причина этому — надежность. В настоящее время двигатели Scania для коммерческого транспорта насчитывают более 20 марок. Работы по совершенствованию двигателей привело разработчиков к внедрению модульной конструкции. Новые серии ДВС отличались унифицированной поршневой группой диаметром в 127 мм, раздельными 4-клапанными ГБЦ, насос-форсунками с электронным управлением.
В настоящее время модульная технология используется в производстве всех дизельных двигателей Scania. Унификация в производстве значительно снижает себестоимость запчастей. Из европейских автопроизводителей Scania первая и до настоящего времени единственная компания, которая широко использует эту технологию, вероятнее всего заимствованную из оборонной промышленности.
Дополнительные технические характеристики двигателей DC11:
- диаметр цилиндра 127 мм;
- ход поршня 140 мм;
- порядок работы цилиндров — 1-5-3-6-2-4;
- степень сжатия 18:1;
- минимальная частота вращения на холостом ходу – 500 об/мин;
- максимальная частота вращения на холостом ходу – 2400 об/мин.
Первая модификация имела топливный насос высокого давления (ТНВД), на вторую уже устанавливались электронно-магнитные насос-форсунки с системой впрыска PDE. Более технологичная система впрыска HPI не прижилась в российских условиях из-за низкого качества отечественного дизельного топлива. У нас содержание серы в солярке может превышать европейские нормативы в 7-8 раз. Зато такое соотношение вполне нормально «переваривает» система PDE.
В свое время из-за неведения многие владельцы, купившие б/у Scania с системой HPI, горько об этом пожалели. Автомобили еле выхаживали по 100 тыс. км, после чего силовой агрегат приходил в негодность и подлежал поиску на разборках Scania и замене. На моторы DC11 устанавливались ограничители белого дыма и ограничители скорости (до 85 км/ч).
wikers.ru
Двигатель постоянного тока [Robotic & Microcontroller Educational Knowledgepage
Теория

Двигатель постоянного тока
Двигатели постоянного тока с постоянным магнитом широко распространены в различных приложениях, где важны маленькие размеры, большая мощность и низкая цена. В связи с относительно большой скоростью вращения, их часто используют вместе с редуктором для достижения низкой скорости и увеличения крутящего момента.
График зависимости между идеальной скоростью (V) двигателя постоянного тока, силы тока (I), мощностью (P), эффективностью (η) и крутящего момента (T).
Двигатели постоянного тока с постоянным магнитом — это двигатели с простым строением и элементарным управлением. Не смотря на то, что управление легкое, скорость их вращения точно не определяется управляющим сигналом, так как она зависит от многих факторов, прежде всего от нагрузки, прилагаемой на вал и напряжения питания. Соотношение идеального крутящего момента двигателя постоянного тока и скорости — линеарное, что означает, что чем больше нагрузка на вал, тем медленнее скорость и тем больше проходящий в обмотке ток.
HДвигатели постоянного тока со щетками работают на постоянном токе и, в принципе, не нуждается в отдельной управляющей электронике, т.к. вся необходимая коммутация происходит внутри двигателя. Во время работы двигателя на вращающемся коммутаторе ротора скользят две статические щетки и держат обмотки под напряжением. Направление движения вращения устанавливается полярностью напряжения питания. Если управлять двигателем нужно только в одну сторону, то питающий ток можно подать через реле или другим простым включением, а если в обе стороны, то используется электросхема называемая H-мостом.
Принцип работы H-моста на примере выключателей.
В H-мосте ток, нужный для вращения двигателя, направляют четыре транзистора (или их группа). Электросхема H-моста напоминает букву H — отсюда и название. Особенность H-моста заключается в возможности применения обоих полярностей двигателя. На рядом находящейся картинке приведена принципиальная схема H-моста на примере выключателей. Если в этой схеме замкнуть два диагонально расположенных выключателя, двигатель начнет работать. Направление вращения зависит от того, в какой диагонали выключатели замыкаются. В реальном H-мосте вместо выключателей используются, конечно, транзисторы, которые выбраны в соответствии с током и напряжением двигателя.
С помощью H-моста можно помимо направления вращения изменять так же и скорость вращения двигателя — для этого следует непрерывно открывать и закрывать транзисторы широтно-импульсной модуляцией (PWM) так, чтобы суммарная энергия, подводимая к двигателю, была где-то между выключенным состоянием и полной мощностью. Открытое время на протяжении всего периода PWM, называют рабочим циклом (в английском языке duty cycle), и обозначают процентами. 0% означает, что транзистор закрыт, т.е. не проводит ток, 100% означает, что транзистор открыт или проводит ток. Частота PWM должна быть достаточно высокой, чтобы избежать вибрации вала двигателя. При низкой частоте двигатель создает так же шум и поэтому в основном используют частоту модуляции выше 20 kHz. С другой стороны эффективность H-моста не настолько хороша при очень высоких частотах. Так же испытывает большую эффективность H-моста при очень большой частоте. Вибрацию вала двигателя так же уменьшают инерция ротора и индуктивность обмотки двигателя.
Для управления маленькими токами имеются H-мосты в виде интегрированного компонента или драйвера, для больших токов используют специальные мощные транзисторы (Power MOSFET). H-мосты и входящую в них электронику называют так же контроллером двигателя.
Примечание: Не путать RC (радиоуправляемый серводвигатель) PWM сигнал с сигналом обычного PWM.
Практика
Используемый в Домашней Лаборатории драйвер L293D двигателя постоянного тока содержит в себе два интегрированных H-моста и защитных диода. Двигатель управляется тремя дигитальными сигналами, одним из которых является общий, разрешающий работу сигнал (на английском языке enable). Два других сигнала обозначают состояние транзисторов H-моста. Два вертикальных транзистора не могут быть никогда открыты, т.к. это замкнет источник питания. Таким образом, драйвер сделан сверхнадежным и выбрать можно только то, который из транзисторов (низкий или высокий) с одной стороны H-моста (полумоста) открыт. Другими словами выбирается полярность с двумя ведущими сигналами, которая прилагается к обоим концам обмотки двигателя.
На плате модуля «Двигатели» Домашней Лаборатории есть возможность подключить до четырех двигателей постоянного тока. Схемы и обучение по подключению находятся в главе модуля «Двигатели». По существу, для каждого двигателя есть H-мост, который управляется двумя дигитальными выходными выводами микроконтроллера, т.к. вывод разрешения постоянно высокий. Если у обоих ведущих выводах одинаковое значение, то двигатель не работает, если значения отличаются, то двигатель вращается в соответствующем направлении. Состояние H-моста характеризует следующая таблица:
| Вход А | Вход Б | Выход А | Выход Б | Результат |
|---|---|---|---|---|
| 0 | 0 | — | — | Двигатель стоит |
| 1 | 1 | + | + | Двигатель стоит |
| 1 | 0 | + | — | Двигатель вращается в одну сторону |
| 0 | 1 | — | + | Двигатель вращается в другую сторону |
Двигателями постоянного тока можно управлять напрямую, манипулируя выводами микроконтроллера входные выводы драйвера двигателя, но в библиотеке Домашней Лаборатории имеются для этого упрощающие функции.
//
// Настройка выводов контроллера двигателя постоянного тока
//
static pin dcmotor_pins[4][2] =
{
{ PIN(B, 7), PIN(B, 4) },
{ PIN(D, 1), PIN(D, 0) },
{ PIN(D, 7), PIN(D, 6) },
{ PIN(D, 5), PIN(D, 4) }
};
//
// Разрешение управления выбранного двигателя постоянного тока
//
void dcmotor_init(unsigned char index)
{
pin_setup_output(dcmotor_pins[index][0]);
pin_setup_output(dcmotor_pins[index][1]);
}
//
// Обозначение работы выбранного двигателя постоянного тока и направления работы.
//
void dcmotor_drive(unsigned char index, signed char direction)
{
pin_set_to(dcmotor_pins[index][0], direction < 0);
pin_set_to(dcmotor_pins[index][1], direction > 0);
}В библиотеке определяются управляющие выводы четырёх микроконтроллеров массивом dcmotor_pins. Перед управлением двигателем нужно вызвать функцию dcmotor_init вместе с цифровым (от 0 до 3) параметром микроконтроллера, который настраивает соответствующие выводы выходом. Для управления имеется функция dcmotor_drive, с помощью которой дается выбранному двигателю негативным параметром direction одно направление вращения, а позитивным параметром другое направление и в случае 0 двигатель останавливается.
Далее приведен пример программы, который управляет первым и вторым двигателем постоянного тока таким образом, что они изменяют направление вращения каждую секунду. Скорость можно изменять, если один управляющий вывод модулировать PWM сигналом.
//
// Тестирующая программа двигателя постоянного тока
// модуля «Двигатели» Домашней Лаборатории
//
#include <homelab/module/motors.h>
#include <homelab/delay.h>
//
// Основная программа
//
int main(void)
{
// Изменяющая направление
signed char direction = 1;
// Настройка двигателя 0 и 1
dcmotor_init(0);
dcmotor_init(1);
// Бесконечный цикл
while (true)
{
// Один двигатель работает в одну сторону, другой в другую сторону
dcmotor_drive(0, -direction);
dcmotor_drive(1, +direction);
// Пауза в 1 секунду
sw_delay_ms(1000);
// Изменение направления вращения
direction = -direction;
}
}home.roboticlab.eu
Бесщеточный электродвигатель DC • ru.knowledgr.com
Бесщеточный электродвигатель DC (двигатели BLDC, двигатели BL) также известный как в электронном виде commutated двигатели (ECMs, двигатели EC) является синхронными двигателями, которые приведены в действие электрическим источником DC через интегрированный инвертор/источник электропитания, который производит электрический сигнал AC вести двигатель. В этом контексте AC, переменный ток, не подразумевает синусоидальную форму волны, а скорее двунаправленный ток без ограничения на форму волны. Дополнительные датчики и электроника управляют амплитудой продукции инвертора и формой волны (и поэтому процент автобусного использования/эффективности DC) и частота (т.е. скорость ротора).
Часть ротора бесщеточного двигателя часто — постоянный магнит синхронный двигатель, но может также быть переключенным двигателем нежелания или асинхронным двигателем.
Бесщеточные двигатели могут быть описаны как шаговые двигатели; однако, термин шаговый двигатель имеет тенденцию быть использованным для двигателей, которые специально разработаны, чтобы управляться в способе, где они часто останавливаются с ротором в определенном угловом положении. Эта страница описывает более общие бесщеточные моторные принципы, хотя есть наложение.
Два ключевых эксплуатационных параметра бесщеточных электродвигателей постоянного тока — моторные константы Kv и Km.
Бесщеточный против почищенных двигателей
Почищенные электродвигатели постоянного тока были в коммерческом употреблении с 1886. Бесщеточные двигатели, с другой стороны, не становились коммерчески жизнеспособными до 1962.
Почищенные электродвигатели постоянного тока развивают максимальный вращающий момент, когда постоянный, линейно уменьшаясь, когда скорость увеличивается. Некоторые ограничения почищенных двигателей могут быть преодолены бесщеточными двигателями; они включают более высокую эффективность и более низкую восприимчивость к механическому изнашиванию. Эти преимущества прибывают за счет потенциально менее бурной, более сложной, и более дорогой электроники контроля.
Утипичного бесщеточного двигателя есть постоянные магниты, которые вращаются вокруг фиксированной арматуры, устраняя проблемы, связанные с соединением тока к движущейся арматуре. Электронный регулятор заменяет сборку щетки/коммутатора почищенного электродвигателя постоянного тока, который все время переключает фазу на windings, чтобы держать моторное превращение. Диспетчер выполняет подобное рассчитанное распределение власти при помощи схемы твердого состояния, а не системы щетки/коммутатора.
Бесщеточные двигатели предлагают несколько преимуществ перед почищенными электродвигателями постоянного тока, включая большее количество вращающего момента за вес, больше вращающего момента за ватт (увеличенная эффективность), увеличенная надежность, уменьшенный шум, более длинная целая жизнь (никакая щетка и эрозия коммутатора), устранение ионизации искр от коммутатора и полного сокращения электромагнитного вмешательства (EMI). Без windings на роторе они не подвергнуты центробежным силам, и потому что windings поддержаны жильем, они могут быть охлаждены проводимостью, не требуя никакого потока воздуха в двигателе для охлаждения. Это в свою очередь означает, что внутренности двигателя могут быть полностью приложены и защищены от грязи или другого иностранного вопроса.
Бесщеточная моторная замена может быть осуществлена в программном обеспечении, используя компьютер микроконтроллера или микропроцессора или может альтернативно быть осуществлена в аналоговых аппаратных средствах, или в цифровом программируемом оборудовании, используя FPGA. Замена с электроникой вместо щеток допускает большую гибкость и возможности, не доступные с почищенными электродвигателями постоянного тока, включая ограничение скорости, «микро ступил» операция для медленного и/или прекрасного контроля за движением и держащийся вращающий момент, когда постоянный.
Максимальная мощность, которая может быть применена к бесщеточному двигателю, ограничена почти исключительно высокой температурой; слишком много высокой температуры ослабляет магниты и может повредить изоляцию проветривания.
Преобразовывая электричество в механическую энергию, бесщеточные двигатели более эффективны, чем почищенные двигатели. Это улучшение происходит в основном из-за скорости бесщеточного двигателя, определяемой частотой, в которой электричество переключено, не напряжение. Дополнительная прибыль происходит из-за отсутствия щеток, которое уменьшает механическую энергетическую потерю из-за трения. Расширенная эффективность является самой большой в регионе без грузов и области низкого груза кривой производительности двигателя. Под высокой механической нагрузкой бесщеточные двигатели и высококачественные почищенные двигатели сопоставимы в эффективности.
Окружающая среда и требования, в которых изготовители используют электродвигатели постоянного тока бесщеточного типа, включают операцию без обслуживаний, высокие скорости и операцию, где зажигание опасно (т.е. взрывчатая окружающая среда) или могло затронуть в электронном виде секретное снаряжение.
Внедрения диспетчера
Поскольку диспетчер должен направить вращение ротора, диспетчер требует некоторых средств определения ориентации/положения ротора (относительно катушек статора.) Некоторые проекты используют датчики эффекта Зала или ротационное кодирующее устройство, чтобы непосредственно измерить положение ротора. Другие измеряют обратную эдс в неведомых катушках, чтобы вывести положение ротора, избавляя от необходимости отдельные датчики эффекта Зала, и поэтому часто называются sensorless диспетчерами.
Типичный контроллер содержит 3 двунаправленной продукции (т.е. частота управляла тремя продукцией фазы), которыми управляет логическая схема. Простые диспетчеры используют компараторы, чтобы определить, когда фаза продукции должна быть продвинута, в то время как более продвинутые диспетчеры нанимают микродиспетчера, чтобы управлять ускорением, скоростью контроля и точно настроить эффективность.
Диспетчеры, что у положения ротора смысла, основанного на обратной эдс, есть дополнительные проблемы в инициировании движения, потому что никакая обратная эдс не произведена, когда ротор постоянен. Это обычно достигается, начиная вращение с произвольной фазы, и затем переходя к правильной фазе, если это, как находят, неправильно. Это может заставить двигатель бежать кратко назад, добавив еще больше сложности к последовательности запуска. Другие sensorless диспетчеры способны к измерению вьющейся насыщенности, заставленной положением магнитов вывести положение ротора.
Изменения в строительстве
Бесщеточные двигатели могут быть построены в нескольких различных физических конфигурациях: В ‘обычном’ (также известный как inrunner) конфигурация, постоянные магниты — часть ротора. Три статора windings окружают ротор. В outrunner (или внешний ротор) конфигурация, полностью изменены радиальные отношения между катушками и магнитами; катушки статора создают центр (ядро) двигателя, в то время как постоянные магниты вращаются в пределах нависающего ротора, который окружает ядро. Плоский или осевой тип потока, используемый, где там пространство или формирует ограничения, статор использования и пластины ротора, установленные лицом к лицу. Outrunners, как правило, имеют больше полюсов, настраивают в тройках, чтобы поддержать три группы windings и иметь более высокий вращающий момент в низком RPMs. Во всех бесщеточных двигателях катушки постоянны.
Есть две общих электрических вьющихся конфигурации; конфигурация дельты соединяет три windings друг с другом (последовательные схемы) в подобной треугольнику схеме, и власть применена при каждой из связей. Уай (Y-образная) конфигурация, иногда называемая звездным проветриванием, соединяет все windings к центральной точке (параллельные схемы) и власть, применен к остающемуся концу каждого проветривания.
Двигатель с windings в конфигурации дельты дает низкий вращающий момент на низкой скорости, но может дать более высокую максимальную скорость. Конфигурация Уая дает высокий вращающий момент на низкой скорости, но не как высокая максимальная скорость.
Хотя эффективность значительно затронута строительством двигателя, проветривание Уая обычно более эффективно. В связанном с дельтой windings половина напряжения применена через windings смежное со стимулируемым лидерством (по сравнению с проветриванием непосредственно между ведомым, ведет), увеличивая потери имеющие сопротивление. Кроме того, windings может позволить высокочастотному паразитному электрическому току циркулировать полностью в пределах двигателя. Связанное с Уаем проветривание не содержит замкнутый контур, в котором паразитный ток может течь, предотвращая такие потери.
С точки зрения диспетчера два стиля windings рассматривают точно то же самое.
Заявления
Бесщеточные двигатели выполняют много функций, первоначально выполненных почищенными электродвигателями постоянного тока, но стоят и управляют сложностью, препятствует тому, чтобы бесщеточные двигатели заменили почищенные двигатели полностью в самых дешевых областях. Тем не менее, бесщеточные двигатели прибыли, чтобы доминировать над многими заявлениями особенно устройства, такие как компьютерные жесткие диски и CD/DVD плееры. Маленькие вентиляторы в электронном оборудовании приведены в действие исключительно бесщеточными двигателями. Они могут быть найдены в переносных электроприборах, где увеличенная эффективность двигателя приводит к более длинным периодам использования, прежде чем батарея должна будет быть заряжена. Низкая скорость, низкая власть бесщеточные двигатели используются в поворотных столах прямого привода для отчетов граммофона.
Транспорт
Мощные бесщеточные двигатели найдены в электромобилях и гибридных автомобилях. Эти двигатели — по существу AC синхронные двигатели с роторами постоянного магнита.
Скутер Segway и Скутер макси Vectrix используют бесщеточные двигатели.
Много электрических велосипедов используют бесщеточные двигатели, которые иногда встраиваются в сам центр колеса со статором, фиксированным единогласно к оси и магнитам, приложенным к и вращающийся с колесом.
Нагревание и вентиляции
Есть тенденция в HVAC и отраслях промышленности охлаждения, чтобы использовать бесщеточные двигатели вместо различных типов электродвигателей переменного тока. Самой значительной причиной переключиться на бесщеточный двигатель является драматическое сокращение власти, требуемой управлять ими против типичного электродвигателя переменного тока. В то время как экранирующий полюс и постоянные двигатели конденсатора разделения, над которыми когда-то доминируют как предпочтительный двигатель вентилятора, многими поклонниками теперь управляют, используя бесщеточный двигатель. Некоторые поклонники используют бесщеточные двигатели также, чтобы увеличить полную системную эффективность.
В дополнение к более высокой эффективности бесщеточного двигателя определенные системы HVAC (особенно те, которые показывают переменную скорость и/или модуляцию груза), используют бесщеточные двигатели, потому что встроенный микропроцессор допускает programmability, лучше управляйте по потоку воздуха и последовательной коммуникации.
Организация производства
Применение бесщеточных электродвигателей постоянного тока в пределах промышленного строительства прежде всего сосредотачивается на машиностроении или промышленном дизайне автоматизации. В производстве бесщеточные двигатели прежде всего используются для контроля за движением, расположения или систем приведения в действие.
Бесщеточные двигатели идеально подходят для внедрений в производство из-за их мощной плотности, хороших особенностей вращающего момента скорости, высокой эффективности и широких диапазонов скорости и низких эксплуатационных расходов. Наиболее популярные способы использования бесщеточных электродвигателей постоянного тока в промышленном строительстве — линейные двигатели. servomotors, приводы головок для промышленных роботов, двигателей двигателя экструдера и подачи двигаются для станков CNC.
Системы управления движения
Бесщеточные двигатели обычно используются в качестве насоса, вентилятора и шпиндельных двигателей в приложениях приспосабливаемой или переменной скорости. Они могут развить высокий вращающий момент с хорошим ответом скорости. Кроме того, они могут быть легко автоматизированы для дистанционного управления. Из-за их строительства, у них есть хорошие тепловые особенности и высокая эффективность использования энергии. Чтобы получить ответ переменной скорости, бесщеточные двигатели работают в электромеханической системе, которая включает электронный моторный контроллер и датчик обратной связи положения ротора.
Бесщеточные электродвигатели постоянного тока широко используются в качестве servomotors для двигателей сервомотора станка. Servomotors используются для механического смещения, расположения или контроля за движением точности. В прошлом шаговые двигатели DC использовались в качестве servomotors; однако, так как они управляются с контролем за разомкнутым контуром, они, как правило, показывают пульсации вращающего момента. Бесщеточные электродвигатели постоянного тока более подходят как servomotors, так как их точное движение основано на системе управления замкнутого контура, которая обеспечивает которой плотно управляют и стабильную операцию.
Расположение и системы приведения в действие
Бесщеточные двигатели используются в промышленном расположении и приложениях приведения в действие. Для роботов собрания бесщеточный степпер или серводвигатели используются, чтобы поместить часть для собрания или инструмент для производственного процесса, такого как сварка или живопись. Бесщеточные двигатели могут также использоваться, чтобы вести линейные приводы головок
Двигатели, которые непосредственно производят линейное движение, называют линейными двигателями. Преимущество линейных двигателей состоит в том, что они могут произвести линейное движение без потребности системы передачи, такой как винт шара-и-лидерства, стойка-и-зубчатый-валик, кулак, механизмы или пояса, которые были бы необходимы для ротационных двигателей. Системы передачи, как известно, вводят меньше живого отклика и уменьшенной точности. Прямой привод, бесщеточные линейные двигатели DC состоят из выдолбленного статора с магнитными зубами и движущимся приводом головок, у которого есть постоянные магниты и катушка windings. Чтобы получить линейное движение, моторный диспетчер волнует катушку windings в приводе головок, вызывающем взаимодействие магнитных полей, приводящих к линейному движению. Трубчатые линейные двигатели — другая форма линейного моторного дизайна, управляемого похожим способом.
Образцовая разработка
Бесщеточные двигатели — популярный моторный выбор для модельного самолета включая вертолеты. Их благоприятные отношения власти к весу и большой спектр доступных размеров, из-под 5 граммов к большим двигателям, оцененным в хорошо в диапазон продукции киловатта, коренным образом изменили рынок для электрически приведенного в действие образцового полета, переместив фактически все почищенные электродвигатели. Они также поощрили рост простого, легкого электрического модельного самолета, а не предыдущие двигатели внутреннего сгорания, приводящие большие и более тяжелые модели в действие. Большое отношение власти к весу современных батарей и бесщеточных двигателей позволяет моделям подниматься вертикально, вместо того, чтобы постепенно подниматься. Низкий шум и отсутствие беспорядка по сравнению с маленькими топливными двигателями внутреннего сгорания жара — другая причина их популярности.
Юридические ограничения для использования двигателя внутреннего сгорания, который ведут модельным самолетом в некоторых странах, также поддержали изменение к мощным электрическим системам.
Автомобили на радиоуправлении
Их популярность также повысилась в автомобильной области на радиоуправлении. Бесщеточные двигатели были законны на североамериканских ЕМКОСТНО-РЕЗИСТИВНЫХ автомобильных гонках в соответствии, чтобы РЕВЕТЬ с 2006. Эти двигатели обеспечивают большую сумму власти ЕМКОСТНО-РЕЗИСТИВНЫМ гонщикам и, если соединено с соответствующим левереджем и высоким выбросом По лития (литиевый полимер) или значительно более безопасные батареи LiFePO4, эти автомобили могут достигнуть скоростей.
Бесщеточные двигатели способны к производству большего количества вращающего момента и имеют больший пиковый RPM по сравнению с nitro, или бензин привел двигатели в действие. Двигатели Нитро достигают кульминации, чтобы достигнуть максимума в пределах 46 800 об/мин и 2.95 л. с., в то время как меньшее бесщеточное моторное вообще максимальное начало вращающего момента, тогда сужающееся, может достигнуть 50 000 об/мин и 5 л. с.
См. также
- Бесщеточный электродвигатель AC
- Ротор клетки белки
Внешние ссылки
- Как Моторная Работа (почищенные и бесщеточные ЕМКОСТНО-РЕЗИСТИВНЫЕ двигатели самолета)
- Мультипликация Двигателя BLDC в различной замене (Блок, Звезда, Пазуха (синус) & Sensorless) — по сравнению с шаговыми двигателями. Вспышка
- ЕМКОСТНО-РЕЗИСТИВНЫЕ Тайны Хобби: Что является Бесщеточным Двигателем
ru.knowledgr.com