устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
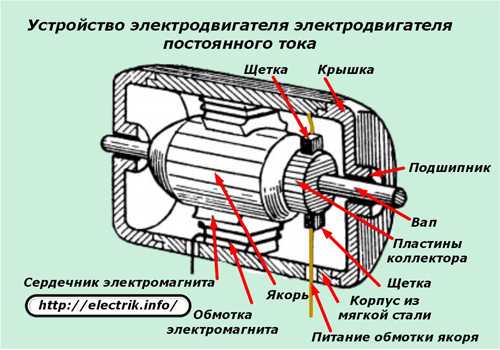
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя.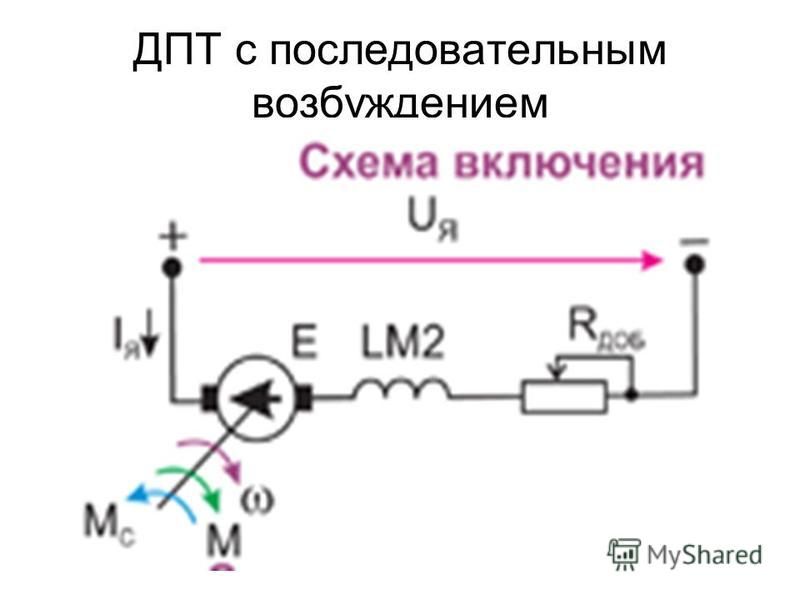 На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
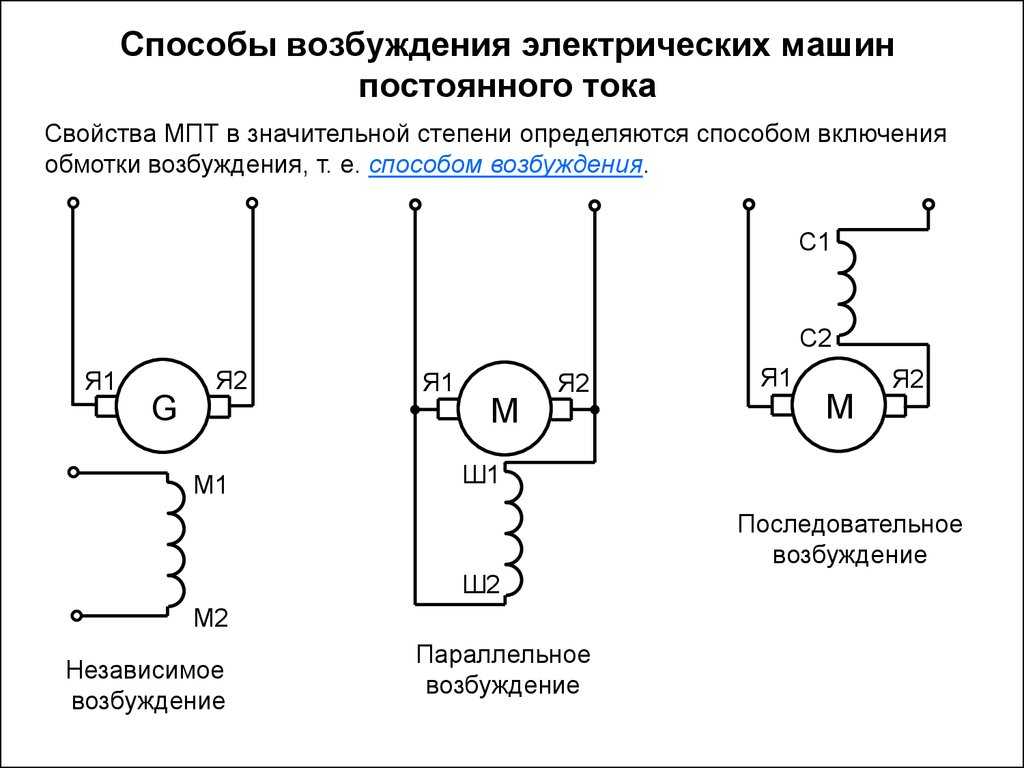
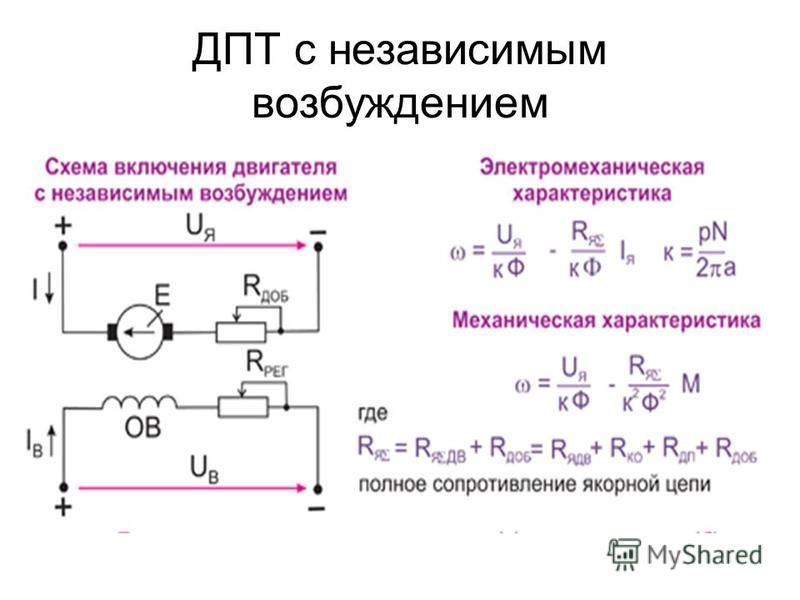
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток.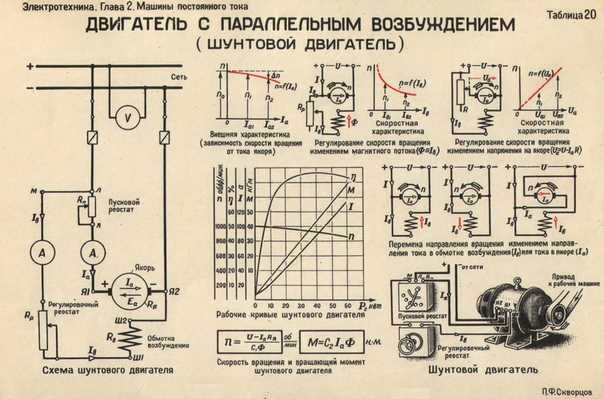 На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
Рисунок 5. Схема электромотора с многообмоточным якоремКоллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение.
Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТЕсли вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится.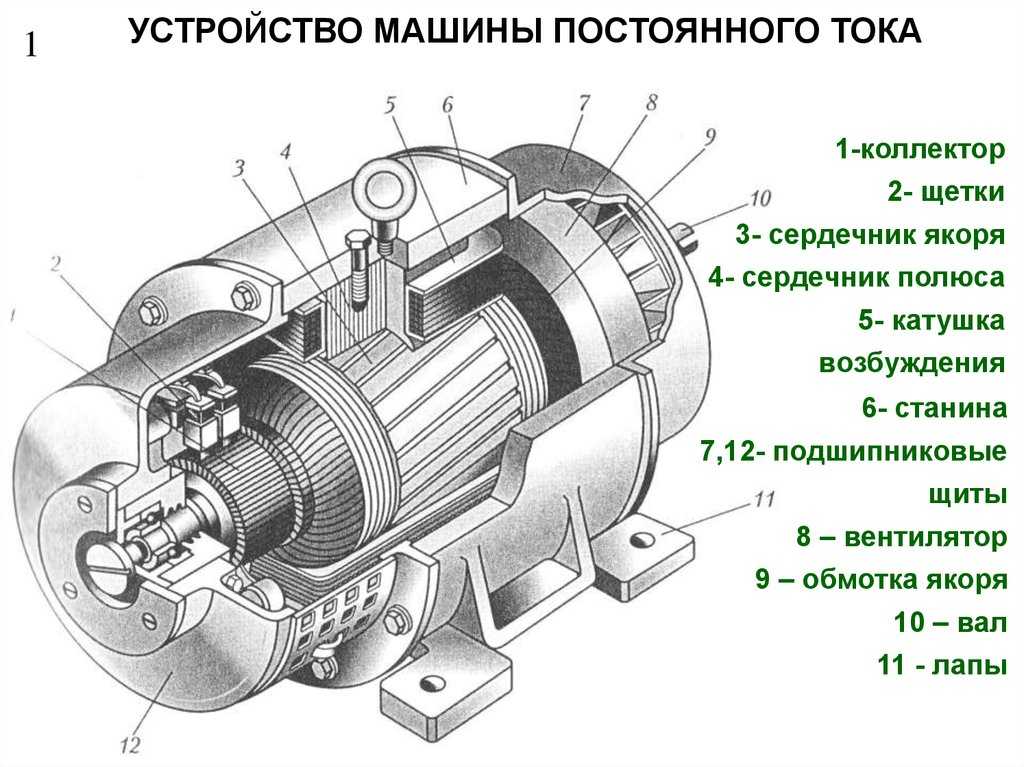 Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбужденияРегулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.

У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
Видео в дополнение к написанному
Бесконтактные двигатели постоянного тока (Лекция 11)
5. БЕСКОНТАКТНЫЕ ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
Двигатели постоянного тока обычного исполнения имеют ценное качество-возможность широко и плавно
регулировать скорость вращения. Вместе с тем они обладают существенным
недостатком, обусловленным щеточно-коллекторным узлом. Вполне естественно,
что появилась мысль создать двигатели, обладающие достоинствами двигателей
постоянного тока и свободные от их недостатков. Такие двигатели
называются бесконтактными двигателями постоянного тока.
Рис.5.1. Структурная схема бесконтактного двигателя постоянного тока
Бесконтактные двигатели постоянного тока состоят из трех элементов (рис. 5.1):
1) бесконтактного двигателя с m-фазной обмоткой на статоре и возбужденным ротором обычно в виде постоянного магнита;
2) датчика положения ротора (ДПР), выполненного в одном корпусе с двигателем и предназначенного для выработки сигналов управления моментами времени и последовательностью коммутации токов в обмотках статора;
3) коммутатора, как правило, транзисторного, осуществляющего по сигналам ДПР коммутацию токов в обмотках статора.
Принцип действия
бесконтактного двигателя рассмотрим на примере упрощенной схемы (рис.
5.2). В ее состав входит двигатель с тремя обмотками на статоре, сдвинутыми в
пространстве на 120 градусов и соединенными в звезду, ДПР с одним
сигнальным элементом (СЭ) и тремя чувствительными элементами (ЧЭ) (их
число равно числу обмоток статора), коммутатор, выполненный на трех
транзисторах, работающих в ключевом режиме, т.
Рис. 5.2. Упрощенная принципиальная схема бесконтактного двигателя постоянного тока
В положении, показанном
на рис.5.2, сигнальный элемент через чувствительный элемент «А»
открывает транзистор ТА. По обмотке А протекает ток IА.
Намагничивающая сила обмотки FА взаимодействует с потоком
постоянного магнита ротора. Возникает вращающий момент, и двигатель приходит во
вращение (1-й такт на рис. 5.3). Вместе с ротором поворачивается и СЭ ДПР. При
повороте ротора на угол чуть больший 30°
СЭ будет воздействовать сразу на два ЧЭ: на «А» и на «В».
Это значит, что будут открыты сразу два транзистора: ТА и ТВ.
Ток будет протекать по обеим обмоткам А и В. Появится результирующая НС
статора F
Рис. 5.3. Первых 3 такта в работе бесконтактного двигателя постоянного тока
Эта НС продолжает взаимодействоватьс полем постоянного магнита; двигатель продолжает развивать вращающий момент.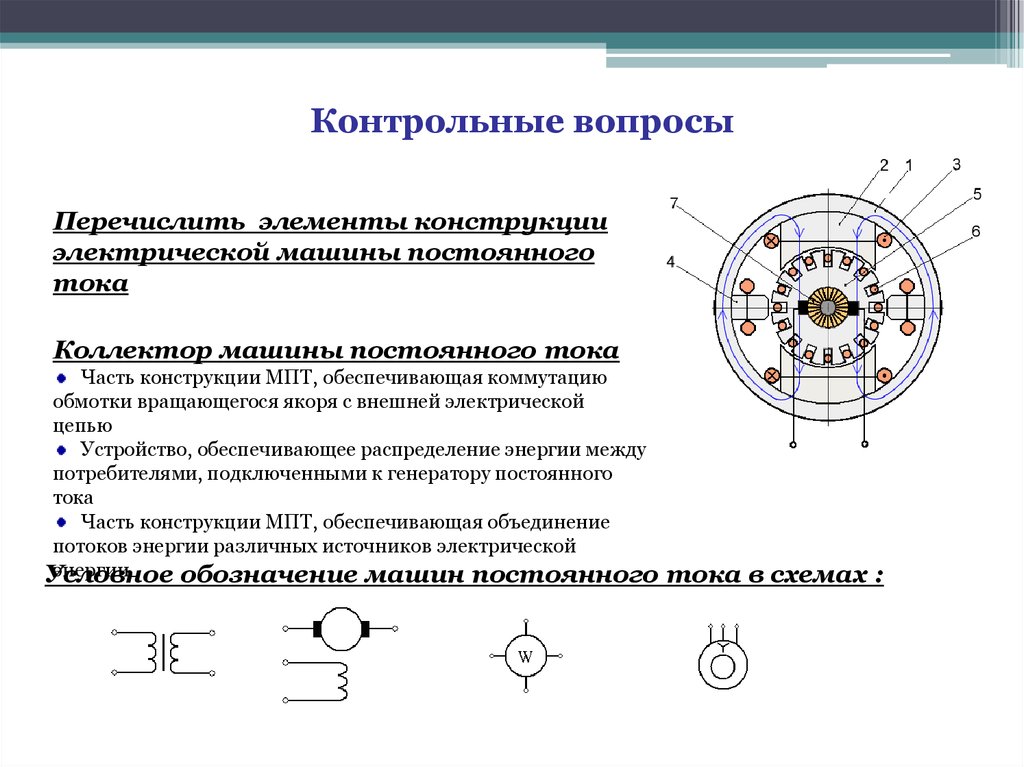
Когда угол поворота станет чуть больше 90°, транзистор ТА закроется, ток будет проходить только по обмотке В. Поле ротора будет взаимодействовать только с НС этой обмотки, однако вращающий момент по прежнему будет воздействовать на ротор двигателя и вращать его в том же направлении (3-й такт на рис. 5.3). В конечном итоге двигатель разовьет такую скорость, при которой его момент будет уравновешиваться моментом нагрузки.
Если бы бесконтактный двигатель имел обмоток, чувствительных элементов и транзисторов столько же, сколько обычный двигатель имеет коллекторных пластин, то по своим свойствам и характеристикам они ничем бы не отличались друг от друга. Однако увеличение числа элементов сильно усложняет конструкцию машины. Поэтому в реальных двигателях число обмоток, а соответственно, и число чувствительных элементов и транзисторов не превышает 3-4.
Малое число обмоток обусловливает ряд особенностей работы бесконтактного двигателя постоянного
тока.
1. Пульсация вращающего момента — возникает вследствие скачкообразного перемещения НС статора (см. положения 1,2,3 рис. 5.3). В соответствии с общими законами электромеханического преобразования энергии момент бесконтактного двигателя может быть определен как скалярное произведение магнитного потока ротора и НС взаимодействующих обмоток статора
| (5.1) |
где: см — постоянный коэффициент; q — угол между потоком ротора и НС статора.
Так как при вращении двигателя угол q непрерывно меняется, то и момент двигателя не остается постоянным.
2. Реакция якоря
периодически изменяется, становясь то поперечной, то продольно намагничивающей, то
продольно размагничивающей (рис. 5.4). Объясняется это опять-таки
скачкообразным перемещением НС статора (якоря). Размагничивающее действие
поля статора особенно сильно при пуске двигателя, т.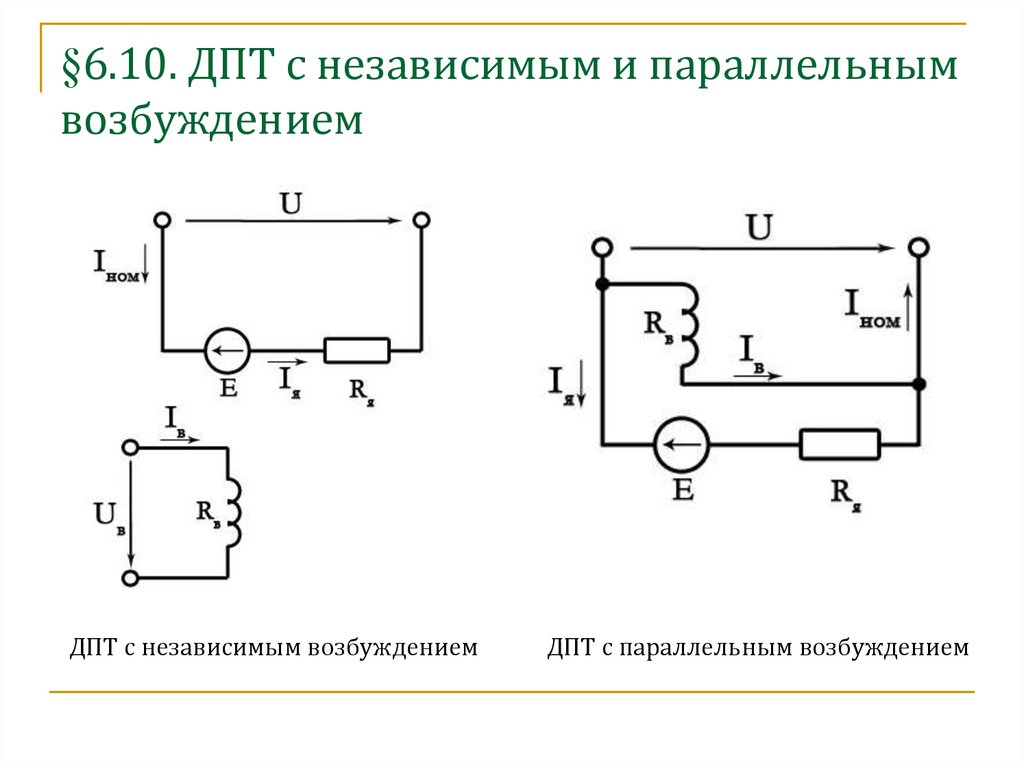 к. при этом противо-ЭДС
равна 0, а ток — наибольший. С этим необходимо считаться при выборе постоянных
магнитов, стабилизация которых происходит в режиме короткого замыкания.
к. при этом противо-ЭДС
равна 0, а ток — наибольший. С этим необходимо считаться при выборе постоянных
магнитов, стабилизация которых происходит в режиме короткого замыкания.
Рис. 5.4. Реакция якоря в бесконтактном двигателе постоянного тока
3. Пульсация токов в обмотках статора и суммарного тока двигателя объясняется дискретным питанием обмоток (в тот момент, когда открыты два транзистора, потребляемый ток вырастает в два раза по сравнению с режимом, когда открыт только один транзистор).
4. Влияние индуктивности обмоток статора.В обычном двигателе секции якоря маловитковые, поскольку общее число витков якоря делится на большое число секций. Индуктивность таких секций сравнительно небольшая. В бесконтактном двигателе общее число витков якоря разбивается на 3-4 обмотки (секции). В результате секции получаются многовитковыми, а, следовательно, обладающими большой индуктивностью т.к. L~W2
С учетом ряда допущений уравнение напряжения для якоря можно записать в виде
(5.
Решая его относительно тока, получим
| (5.3) |
где Т = L/r — электромагнитная постоянная времени.
Выражение перед круглой скобкой есть ток якоря при отсутствии индуктивности. Тогда
(5.4)
При больших скоростях, когда время коммутации невелико, ток в обмотках не успевает достигать установившегося значения. Его эффективное значение становится меньше, чем при L = 0
Вращающий момент прямо пропорционален току якоря, поэтому
| (5.5) |
или
(5.6)
Анализ выражения (5.6)
показывает, что момент имеет две составляющие. Первую — не зависящую от
времени. Она равна моменту при отсутствии индуктивности. Вторую — переменную.
Она появляется из-за индуктивности обмоток. Эта составляющая при всех
скоростях имеет отрицательное значение (U > E). Поэтому можно утверждать,
что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий
момент обычного коллекторного двигателя.
Поэтому можно утверждать,
что, как и ток, вращающий момент бесконтактного двигателя меньше, чем вращающий
момент обычного коллекторного двигателя.
Подставим значение ЭДС Е = сеnФ в формулу (5.6), получим механическую характеристику бесконтактного двигателя
(5.7)
Выразим эту характеристику в относительных единицах, приняв за базисный момент пусковой момент (n = 0, U = Uном), а за базисную скорость — скорость холостого хода (М = 0, U = Uном ). Время t = ¥
Рис. 5.6. Механические характеристики бесконтактного двигателя постоянного тока при разных значения α и L: L2 > L1 > 0
Разделим обе части уравнения (5.7) на Мп:
(5.8)
Обозначим a = U/Uном. С учетом n0 = U/(сеФ) получим
(5.9)
где n = n/n0 - относительная скорость двигателя.
На рис. 5.6 показаны механические характеристики бесконтактного двигателя при
разных индуктивностях обмоток статора L.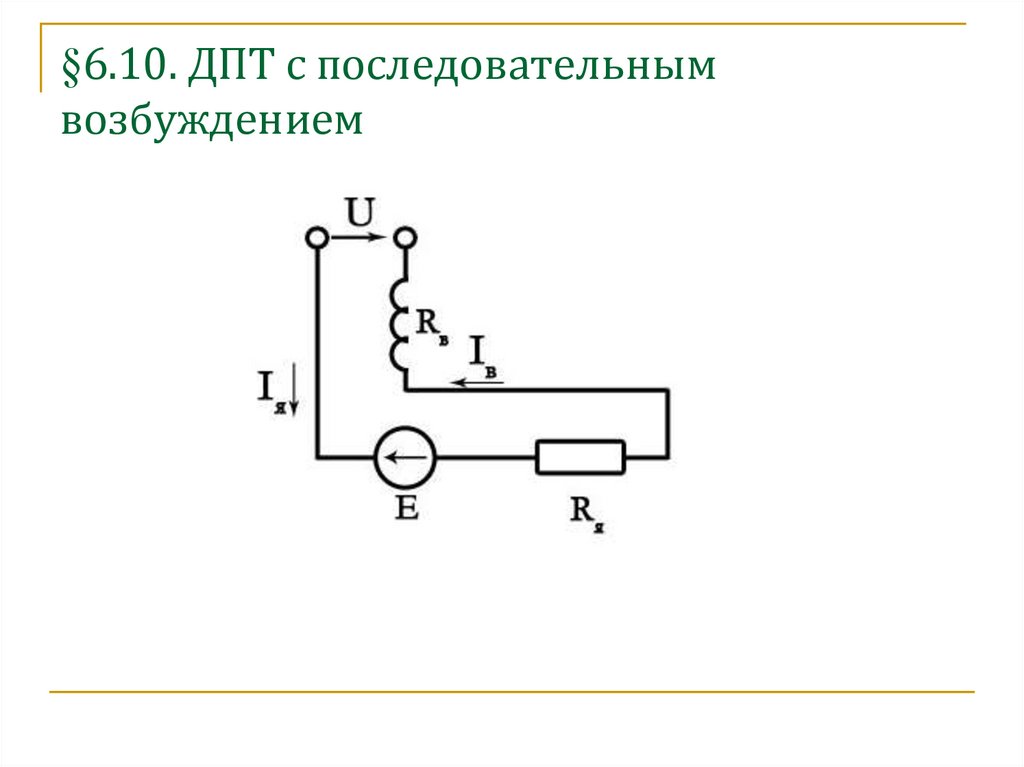 Видно, что с увеличением L
нелинейность характеристик увеличивается.
Видно, что с увеличением L
нелинейность характеристик увеличивается.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания.
Однако на практике чаше применяется импульсный способ, сущность которого заключается в изменении не величины постоянно подводимого напряжения, а длительности питания двигателя номинальным напряжением.
§ 5.1. Датчики положения ротора
Датчики положения ротора определяются их чувствительными элементами, которые могут быть построены с использованием ЭДС Холла, фотоэффекта и т.д.
Рис. 5.7. Датчик положения ротора трансформаторного типа
Достаточно широкое распространение получили датчики электромагнитного – трансформаторного типа. На рис. 5.7. показан один из них.
Чувствительными элементами датчика являются три трансформатора (Тр1, Тр2,
Тр3), сдвинутыми в пространстве на 120 эл. град. Сердечники
трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя
и тр. Первичные обмотки трансформаторов (I) питаются напряжением
высокой частоты (порядка нескольких килогерц) от маломощного источника.
Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
град. Сердечники
трансформаторов выполняются из быстронасыщающихся материалов – феррита, пермалоя
и тр. Первичные обмотки трансформаторов (I) питаются напряжением
высокой частоты (порядка нескольких килогерц) от маломощного источника.
Вторичные обмотки через диоды включаются в базы соответствующих транзисторов.
Ротор датчика состоит из постоянного магнита 1, полюсного наконечника 2, выполненного из магнитомягкого материала, и немагнитного полуцилиндра 3.
Элементам конструкции датчика придаются такие формы и они располагаются так, чтобы сердечники трансформаторов, перекрытые полюсным наконечником 2, были насыщенными. В этом случае ЭДС вторичных обмоток трансформаторов (II) практически равны нулю и сигналы на базы транзисторов не поступают. Управляющие сигналы поступают только от тех трансформаторов, сердечники которых не насыщены.
Вопросы: 1) Нарисуйте диаграмму
НС обмоток статора (подобную положениям 1,2,3 на рис. 5.3) при условии, что
дуга чувствительного элемента не 180°
, а 120° .
5.3) при условии, что
дуга чувствительного элемента не 180°
, а 120° .
2) Чему равна величина суммарного тока, потребляемого двигателем из сети, при различных углах поворота ротора и дуге ЧЭ в 120° ?
Далее…
Как управлять скоростью и направлением двигателя постоянного тока
Двигатель постоянного тока — это устройство, которое преобразует электрическую энергию в механическую. Сегодня вы найдете двигатели постоянного тока во многих устройствах, на которые мы полагаемся каждый день, таких как бытовая и офисная техника, автомобили, системы контроля доступа и игрушки. В этом уроке мы рассмотрим основные принципы работы двигателей постоянного тока и покажем вам, как управлять скоростью двигателя с помощью ШИМ, Н-мостовой схемы и L29.3D драйвер двигателя.
Как работают двигатели постоянного тока
На провод с током в присутствии магнитного поля действует механическая сила, действующая в определенном направлении.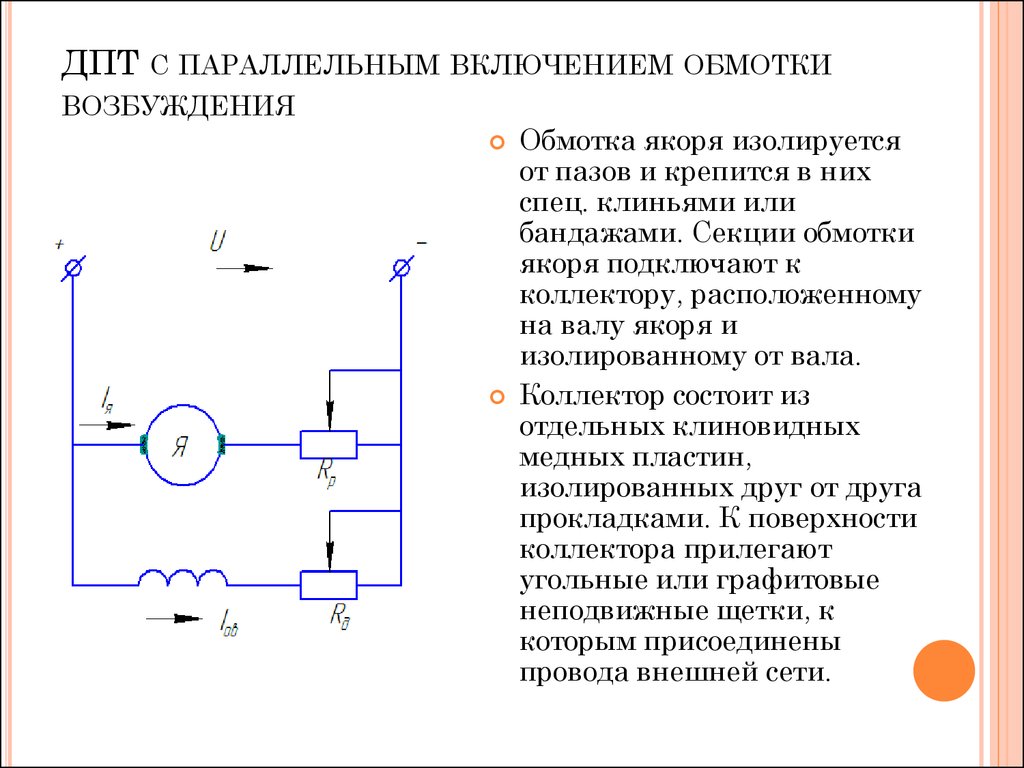
Чтобы определить фокус этой силы, сэр Джон Амброуз Флеминг разработал простой способ, который использует левую руку, чтобы визуализировать взаимосвязь между потоком тока, направлением магнитного поля и направлением силы. Этот простой, но очень эффективный метод стал известен как правило левой руки Флеминга.
Правило левой руки ФлемингаВ двигателе постоянного тока вал соединен с проволочной катушкой, через которую проходит ток. Есть также круглые магниты, окружающие проволочную катушку. Когда на двигатель подается питание, ток течет через проволочную катушку, а магнитное поле заставляет катушку вращаться и поворачивать вал.
Свойства двигателей постоянного тока
При выборе двигателя постоянного тока необходимо учитывать несколько характеристик, определяющих электрические свойства двигателя. В том числе:
- Напряжение: Вы можете найти двигатели постоянного тока, работающие от 1,5 В до 100 В.
- Крутящий момент: Крутящий момент — это сила вращения, которую производит двигатель (в ньютон-метрах).
 Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см.
Двигатели постоянного тока для хобби могут варьироваться от 2,8 г-см до 58 кг-см. - Начальный крутящий момент: Максимальный крутящий момент, развиваемый двигателем, чтобы начать вращательное движение нагрузки. Двигатели постоянного тока имеют высокий пусковой момент.
- Скорость двигателя: Скорость вращения двигателя в оборотах в минуту (об/мин). Типичные скорости холостого хода для двигателей постоянного тока находятся в диапазоне от 1 до 20 000 об/мин.
Как управлять скоростью двигателя с помощью ШИМ
Скорость двигателя постоянного тока прямо пропорциональна напряжению питания. Простым способом управления скоростью двигателя постоянного тока является регулирование напряжения питания с помощью широтно-импульсной модуляции (ШИМ).
Широтно-импульсная модуляция (ШИМ) Основная идея ШИМ заключается в том, что она очень быстро включает и выключает напряжение питания. Регулируя длину импульсов ВКЛ/ВЫКЛ, мы можем установить напряжение в диапазоне от 0 В до максимального напряжения. Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
Мы будем использовать этот ШИМ-сигнал для прямого питания двигателя.
ШИМ-драйвер двигателя
Существует несколько способов генерации ШИМ-сигнала для двигателя, но в этом руководстве мы будем использовать таймер 555. Вот схема этой цепи:
555 Нестабильный мультивибратор с таймером для управления двигателем постоянного токаВыход таймера 555 включает и выключает транзистор Q1. Конденсатор С1 заряжается и разряжается через резисторы R1 и R3. Время зарядки или разрядки конденсатора зависит от номиналов резисторов R1 и R3. Как только конденсатор заряжается, он быстро разряжается через диод D2 и переменный резистор RV1 на вывод 7. В процессе разрядки выход таймера 555 падает до 0 В и отключает транзистор. Поворот переменного резистора регулирует скорость двигателя.
Драйвер двигателя H-Bridge
Типичный двигатель постоянного тока имеет два соединительных провода — один для отрицательной клеммы, а другой — для положительной клеммы. Если вы поменяете местами эти клеммы (изменив полярность), двигатель будет вращаться в противоположном направлении.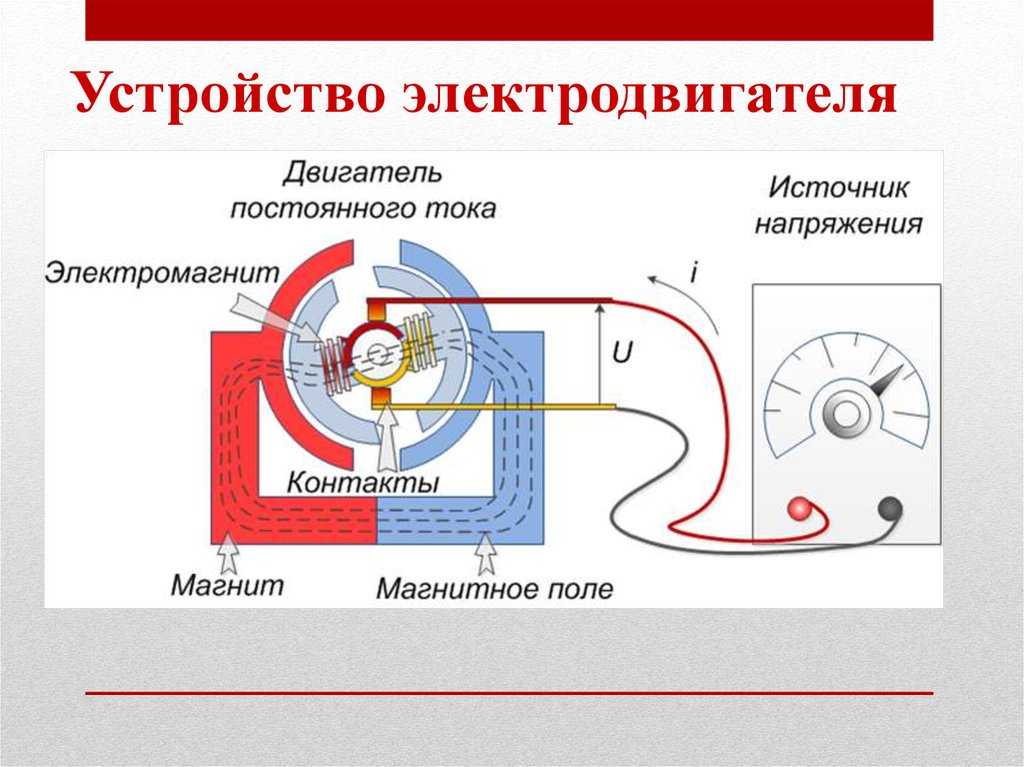 Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Конечно, есть лучшие способы управления направлением двигателя постоянного тока без постоянной смены клемм.
Для этого мы можем использовать схему H-Bridge. Схема H-Bridge получила свое название от четырех транзисторов, которые выглядят как буква «H». Схема Н-моста обеспечивает управление двигателем в обоих направлениях за счет использования различных комбинаций переключателей (S1-S4). В реальном сценарии мы используем транзисторы вместо обычных переключателей.
Простой Н-мостПринцип работы этой схемы прост. У нас есть четыре переключателя, S1-S4. Если мы откроем S2 и S3 и закроем S1 и S4, ток будет течь по часовой стрелке от VCC к земле. Теперь, чтобы поменять полярность двигателя, мы открываем S1 и S4 и замыкаем S2 и S3. Теперь двигатель постоянного тока вращается в противоположном направлении.
Вот схема схемы управления направлением вращения двигателя H-Bridge:
Конфигурация транзистора H-Bridge. BW1 и BW2 управляют обратным направлением двигателя, а FW1 и FW2 реверсируют двигатель постоянного тока.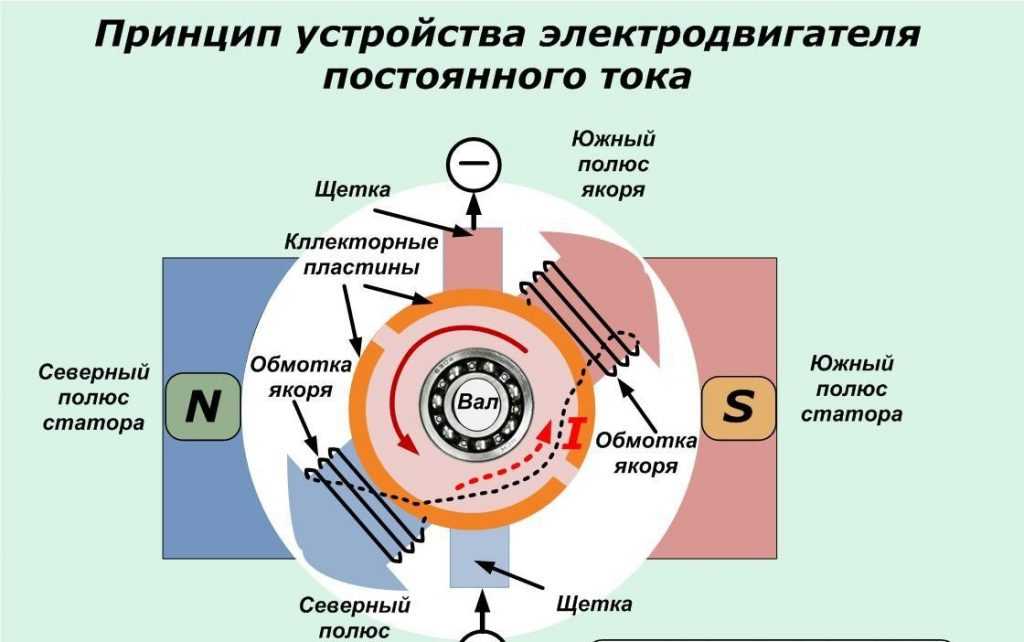
Драйвер двигателя L293D
Как следует из названия, драйвер двигателя L293D предназначен для управления двигателями постоянного тока. L293D — это популярная ИС драйвера двигателя со встроенной схемой Н-моста, которая может одновременно управлять двумя двигателями постоянного тока. Он может подавать ток до 1 А и напряжение от 4,5 В до 36 В.
Это означает, что моторный привод L293D идеально подходит для создания платформ многоколесных роботов. Вот схема L293D, показывающая, как подключать двигатели:
Схематическая диаграмма L293D controlling two DC motorsL293D Pin Descriptions
| L293D Pin | Description | ||
| 1 (Enable 1-2) | Controls the left part of the driver | ||
| 2 (Вход-1) | Контакт входа сигнала | ||
| 3 (Выход-1) | Подключается к одной из клемм двигателя | ||
| 4 и 5 | Заземление | 0067 6 (Выход-2) | Подключается к одной из клемм двигателя |
| 7 (Вход-2) | Контакт входа сигнала | ||
| 8 (Vcc2) | Напряжение питания двигателя должно быть выше чем 4,5 В | ||
| 9 (enable3-4) | Управляет правой частью драйвера | ||
| 10 (Вход-3) | Входной штифт | ||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Выход-3) | |||
| 11 (Outupt к одному из выводов двигателя | |||
| 12 и 13 | Земля | ||
| 14 (выход-4) | подключается к одной из терминалов мотора | ||
| 15 (вход-4) | Источник питания |
 16 Vss
16 VssНадеюсь, эта статья помогла вам лучше понять, как использовать двигатели постоянного тока в ваших электронных проектах! Оставьте комментарий ниже, если у вас есть какие-либо вопросы.
Как использовать двигатели постоянного тока на Raspberry Pi
Двигатель постоянного тока преобразует электрический ток в механическую энергию. Его изобретение в начале 19 века позволило создать новый механизм для привода машин. Перенесемся в 21 век, и двигатель постоянного тока претерпел быстрые научные и промышленные достижения. Сегодня они бывают самых разных форм, размеров и спецификаций для самых разных применений.
В этом руководстве мы узнаем, как работают двигатели постоянного тока, как подключить их к Raspberry Pi и как создать графический интерфейс пользователя для управления скоростью и направлением одного или двух двигателей постоянного тока.
Различные типы двигателей постоянного токаКак работают двигатели постоянного тока
Двигатель постоянного тока состоит из следующих основных частей:
Внутренние части двигателя постоянного тока. Двигатели постоянного тока
Двигатели постоянного токаработают за счет взаимодействия электричества и магнетизма. Электрический ток, протекающий через катушку провода (коммутатор), создает магнитное поле. Когда это магнитное поле помещается во внешнее магнитное поле, создаваемое постоянными магнитами, на катушку действует сила, которая раскручивает двигатель. Эта сила пропорциональна как току, протекающему в катушках, так и силе внешнего магнитного поля.
Зачем двигателям постоянного тока нужен драйвер двигателя
Контакты GPIO Raspberry Pi могут обеспечить ток только 16 мА на контакт, чего недостаточно для питания двигателя постоянного тока. Чтобы обеспечить ток, необходимый двигателю, нам нужно использовать драйвер двигателя. Мы будем использовать распространенный и надежный драйвер двигателя H-bridge L293D. Этот драйвер двигателя будет питать двигатели от отдельного источника питания и управлять двигателями на основе сигналов от Raspberry Pi.
Как управлять двигателем постоянного тока с помощью Raspberry Pi
В этом проекте мы разработаем графический пользовательский интерфейс (GUI) с использованием библиотеки Guizero для управления скоростью и направлением вращения двигателя постоянного тока.
Это детали, которые вам понадобятся:
- Raspberry Pi
- Макета
- Рассказы питания
- 9V. Рассказ
- Джампер -проволо частей, подключите цепь, следуя приведенной ниже схеме.
Код Python для управления одним двигателем
из режима ожидания импорта времени из guizero импортировать приложение, текст, кнопку от гпиозеро импорт Мотор, светодиод двигатель = двигатель (17,18) переключатель двигателя = светодиод (27) app = App(title="GUI Development", layout="grid", height=600, width=800) message = Text(app, text="Интерфейс управления одним двигателем", grid=[4,0]) моторСпидФорвард = 0 моторСпидбэкворд = 0 определение переключателя(): если button0.text=="Начать": MotorSwitch.on () button0.text="Стоп" elif button0.text == "Стоп": MotorSwitch.off() button0.text = "Пуск" защита впередSpeedIncrease(): глобальный моторSpeedForward motor.forward(скорость=motorSpeedForward) print("Увеличение скорости двигателя назад.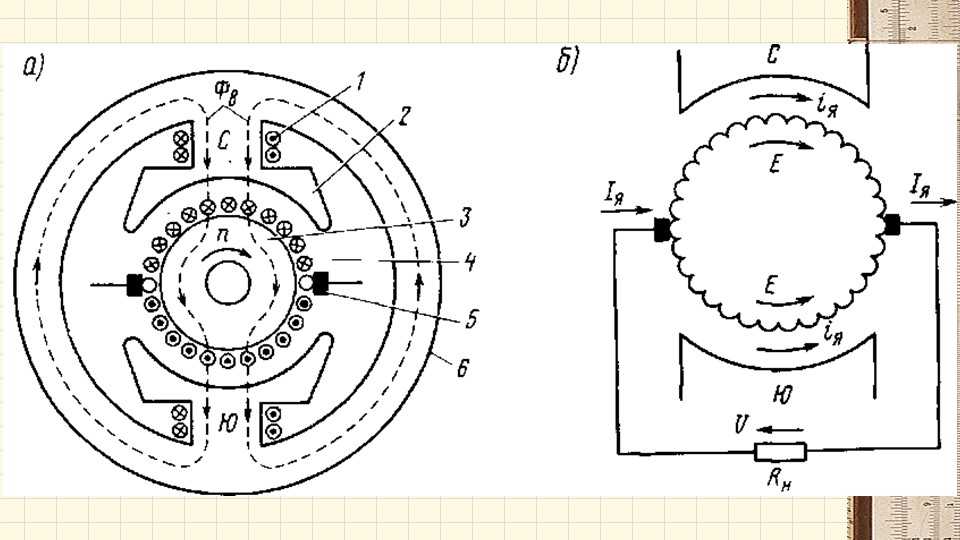 Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor.backward(скорость=motorSpeedBackward)
print("Уменьшить скорость двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward -= 0,1
если MotorSpeedBackward <= 0:
моторСпидбэкворд = 0
Текст(приложение, "Мотор",сетка=[2,1])
button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4])
button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3])
button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5])
button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4])
button4 = PushButton (приложение, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
приложение.
Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor.backward(скорость=motorSpeedBackward)
print("Уменьшить скорость двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward -= 0,1
если MotorSpeedBackward <= 0:
моторСпидбэкворд = 0
Текст(приложение, "Мотор",сетка=[2,1])
button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4])
button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3])
button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5])
button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4])
button4 = PushButton (приложение, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
приложение.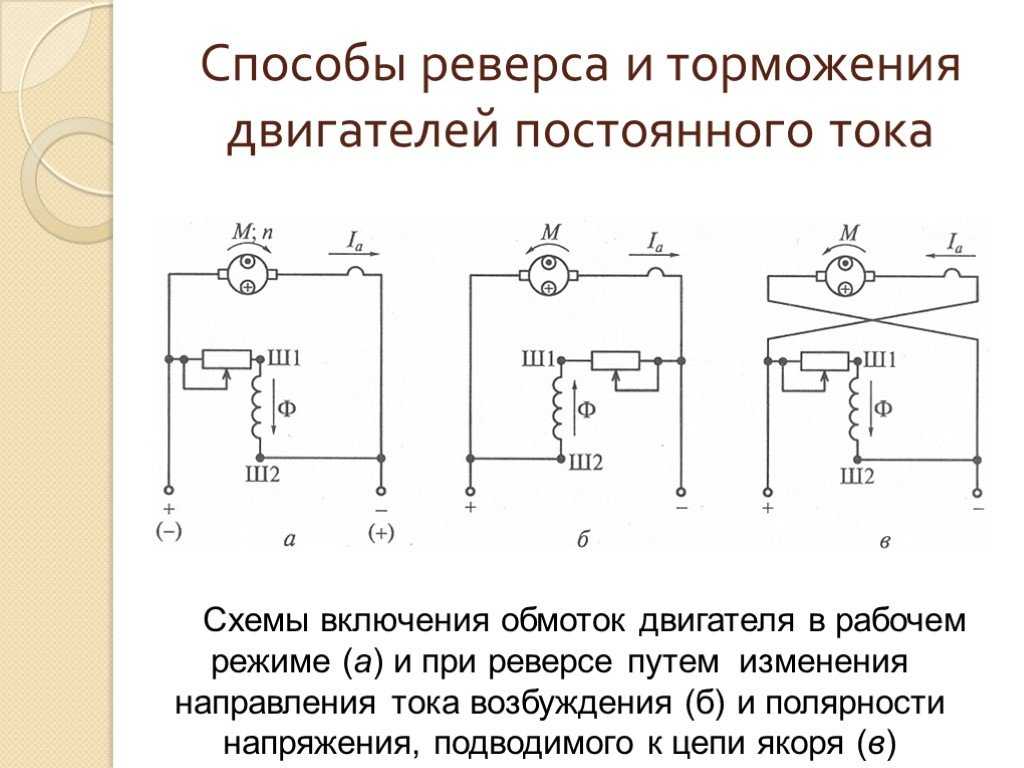 display()
display() Код Описание
В первых трех строчках импортируем необходимые для проекта библиотеки. Для разработки GUI нам понадобится библиотека guizero. А из библиотеки gpiozero мы импортируем класс двигателя и класс светодиода. Нам нужен класс LED, потому что он обеспечивает простой способ управления выводом включения драйвера. Это позволит нам запускать и останавливать двигатель.
В качестве альтернативы вы можете написать код Python для управления выводами GPIO для сигналов двигателя и выводом включения, чтобы избавиться от библиотеки gpiozero. Я использовал только эту библиотеку, потому что мы пишем всего несколько строк кода, которые легко понять и которым легко следовать.
Мы подключили контакты управления двигателем L293D к GPIO17 и GPIO18 Raspberry Pi. Теперь мы создаем экземпляр класса мотора с
motor = Motor(17,18)иmotorSwitch = LED(27). Контрольный вывод Enable подключен к GPIO27.Затем мы инициализируем две переменные с именами
motorSpeedForwardиmotorSpeedBackwardдля управления скоростью двигателя.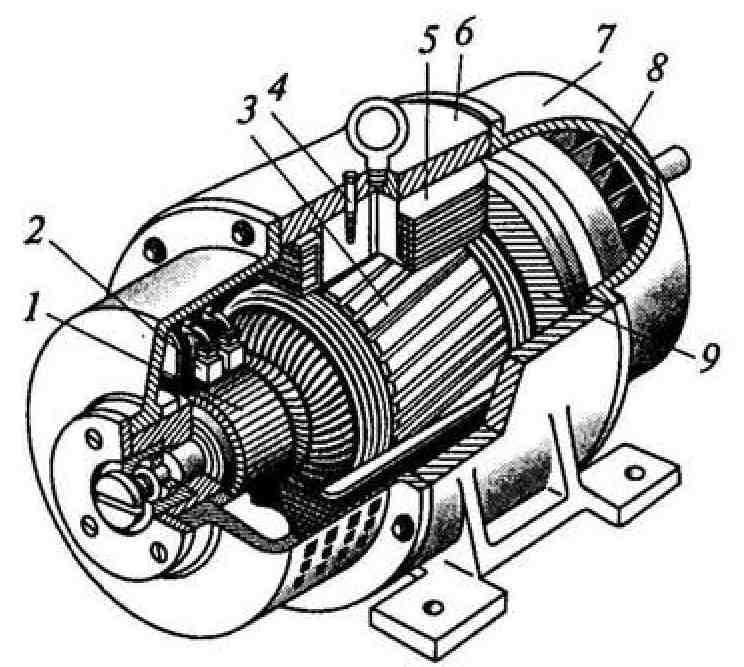
В библиотеке gpiozero есть функции для управления направлением вращения двигателя. Чтобы переместить двигатель вперед, используйте
мотор.вперед(). Чтобы переместить мотор назад, используйтеmotor.backward(). Эти функции принимают скорость двигателя в качестве параметра. Скорость может быть любым числом от 0 (полное выключение) до 1 (максимальная скорость).В приведенной выше программе мы заставляем двигатель вращаться вперед следующим образом:
motor.forward(speed=motorSpeedForward)
Заставляем двигатель вращаться назад следующим образом: также увеличивайте и уменьшайте скорость двигателя в коде, выполняя некоторые математические операции с
motorSpeedForwardиmotorSpeedBackwardпеременные. В каждой приведенной выше функции скорости мы выполняем сложное сложение и сложное вычитание переменных, чтобы изменить их значение и увеличить или уменьшить скорость двигателя в условиях прямого и обратного вращения.
Каждая функция выполняет математическую операцию в зависимости от того, что она должна делать. Самое главное, мы увеличиваем/уменьшаем переменные для скорости двигателя с коэффициентом 0,1, и мы сохраняем переменные между 0 и 1.
Наконец, мы вызываем функцию
app.display()для запуска графического интерфейса.Код для GUI
Код для GUI находится вверху и внизу программы выше. Например, это код для создания простого графического интерфейса:
из time import sleep из guizero импортировать приложение, текст, кнопку импорт системы приложение = Приложение (название = «Разработка графического интерфейса») сообщение = текст (приложение, текст = "Графический интерфейс управления двигателем") app.display()
После определения функций для двигателя мы создаем пользовательский интерфейс и вызываем вышеуказанные функции, когда пользователь нажимает соответствующую кнопку.
Кнопки запрограммированы с этим кодом:
Текст(приложение, "Мотор",сетка=[2,1]) button0 = PushButton (приложение, команда = toggleSwitch, текст = «Пуск», ширина = 10, высота = 3, сетка = [2,4]) button1 = PushButton (приложение, command=forwardSpeedIncrease, text="Frwd Speed +", width=10, height=3, grid=[2,3]) button2 = PushButton (приложение, command=backwardSpeedReduce, text="Bckwd Speed -", width=10, height=3, grid=[2,5]) button3 = PushButton (приложение, command=backwardSpeedIncrease, text = "Bckwd Speed +", width=10, height=3, grid=[1,4]) button4 = PushButton(app, command=forwardSpeedReduce, text="Frwd Speed -", width=10, height=3, grid=[3,4])
Управление двумя двигателями с помощью Raspberry Pi
В этом проекте мы будем использовать графический интерфейс для управления скоростью и направлением двух двигателей постоянного тока.
 Для этого нам нужно лишь внести небольшие изменения в приведенный выше код.
Для этого нам нужно лишь внести небольшие изменения в приведенный выше код.Это детали, которые вам понадобятся:
- Raspberry Pi
- Джамперные провода
- Глепота
- L293D Controller
- Две двигатели DC
- Внешний источник электропередачи
- 9V Fielc частей, подключите двигатели, следуя этой электрической схеме:
Код Python для управления двумя двигателями
В этой программе мы используем класс робота из библиотеки gpiozero. Все остальное остается таким же, как и в предыдущем коде.
из сна импорта времени из guizero импортировать приложение, текст, кнопку от гпиозеро импортный робот, светодиодный двигатель = робот (слева = (4, 14), справа = (17, 18)) переключатель двигателя = светодиод (27) app = App(title="GUI Development", layout="grid", height=600, width=800) сообщение = текст (приложение, текст = "Интерфейс управления двумя двигателями", сетка = [4,0]) моторСпидФорвард = 0 моторСпидбэкворд = 0 определение переключателя(): если button0.
 text=="Начать":
MotorSwitch.on ()
button0.text="Стоп"
elif button0.text == "Стоп":
MotorSwitch.off()
button0.text = "Пуск"
защита впередSpeedIncrease():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor.
text=="Начать":
MotorSwitch.on ()
button0.text="Стоп"
elif button0.text == "Стоп":
MotorSwitch.off()
button0.text = "Пуск"
защита впередSpeedIncrease():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward += 0,1
если MotorSpeedForward >= 1:
моторСпидФорвард = 1
защита впередSpeedReduce():
глобальный моторSpeedForward
motor.forward(скорость=motorSpeedForward)
print("Уменьшить скорость двигателя вперед. Текущая скорость = "+ str(motorSpeedForward))
MotorSpeedForward -= 0,1
если MotorSpeedForward <= 0:
моторСпидФорвард = 0
определение обратной скорости увеличения():
глобальный моторСкоростьНазад
motor.forward(скорость=motorSpeedBackward)
print("Увеличение скорости двигателя назад. Текущая скорость = "+ str(motorSpeedBackward))
MotorSpeedBackward += 0,1
если motorSpeedBackward >= 1:
моторСпидбэкворд = 1
защита назадSpeedReduce():
глобальный моторСкоростьНазад
motor.