Регулирование скорости асинхронного двигателя
Асинхронный двигатель
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f 1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
Читайте также — Торможение асинхронного двигателя
Регулирование скорости вращения и реверсирование асинхронных электродвигателей
- Подробности
- Категория: Учеба
- электродвигатель
- электроснабжение
- сооружения
- оборудование
- подстанции
- обучение
- приборы
- среднее напряжение
Содержание материала
- Электротехника и электрооборудование
- Счетчики электрической энергии
- Мегомметры
- Измерение неэлектрических
- Асинхронные двигатели
- Пуск асинхронных двигателей
- Регулирование скорости асинхронных
- Данные асинхронных двигателей
- Синхронные машины
- Передвижные электростанции
- Синхронные электродвигатели
- Машины постоянного тока
- Генераторы постоянного тока
- Двигатели постоянного тока
- Электропривод генератор-двигатель
- Трансформаторы
- Конструкция трансформаторов до 10
- Данные трансформаторов до 10
- Специальные трансформаторы
- Измерительные трансформаторы
- Аппаратура управления и защиты
- Аппаратура автоматическая
- Реле защиты и управления
- Логические элементы
- Электропривод на строительстве
- Выбор электродвигателя
- Схемы электроприводы
- Электропривод строительных
- Сварочное электрооборудование
- Электрическое освещение
- Устройство освещения
- Нормы освещенности
- Электрические сети строительные
- Аппаратура подстанций
- Электрические сети
- Устройство электрических сетей
- Выбор сечения проводов
- Безопасность обслуживания
- Защитное заземление
Страница 7 из 39
Регулирование скорости вращения асинхронных двигателей производят несколькими способами. Формула скорости вращения асинхронных двигателей:
Формула скорости вращения асинхронных двигателей:
(7.7) где s — скольжение в долях единицы показывает, что скорость вращения может регулироваться изменением частоты тока f, числа пар полюсов р и скольжения s.
- введением в цепь ротора дополнительного сопротивления, что возможно для двигателей с фазным ротором;
- изменением реактивных сопротивлений (дросселей насыщения), включаемых в обмотку статора.
Регулирование скорости асинхронных электродвигателей с фазным ротором введением в его цепь дополнительного сопротивления позволяет уменьшать его скорость практически не более чем на 40—50% номинальной скорости.
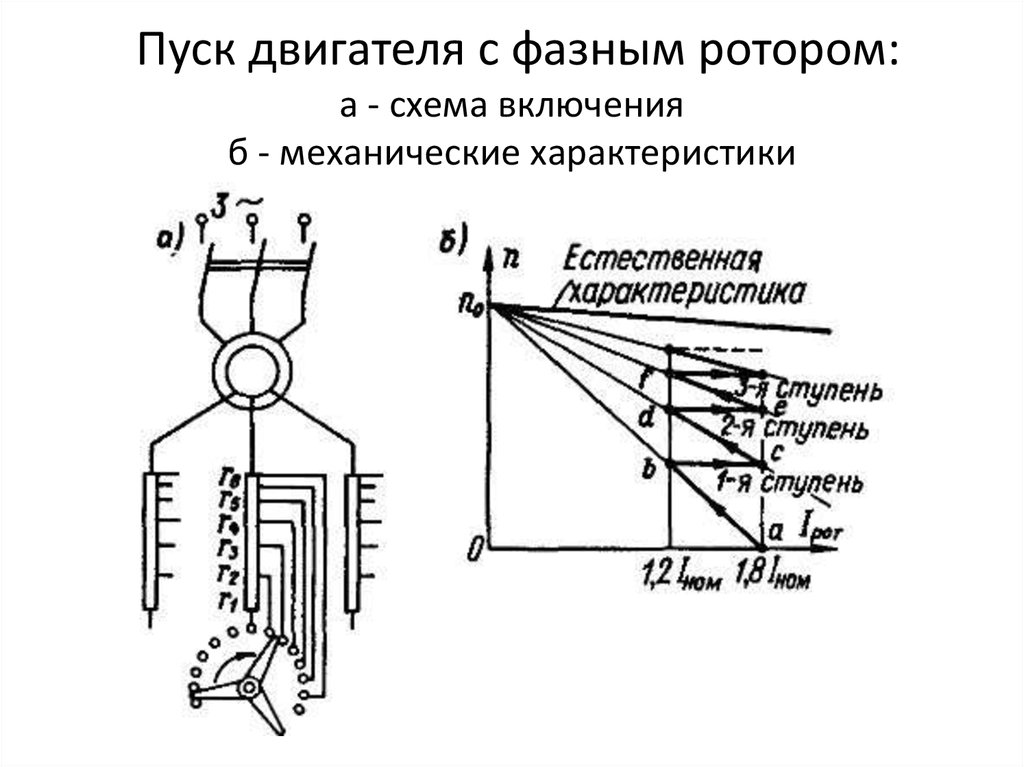
При таком регулировании с увеличением сопротивления реостата увеличивается величина скольжения, т. е. уменьшается число оборотов двигателя. В этом случае схема регулирования сходна со схемой пуска асинхронного электродвигателя с фазным ротором (см. рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
рис.7.8) с той разницей, что регулировочный реостат должен быть рассчитай на длительную нагрузку током. Регулирование скорости с помощью добавочного сопротивления в цепи ротора приводит к неустойчивой работе электродвигателя на малых оборотах, так как при этом приходится включать большие сопротивления, что приводит к значительным колебаниям скорости при небольших изменениях момента сопротивления нагрузки. Кроме того, этот способ мало экономичен, так как увеличивает потери в роторной цепи.
Регулирование скорости асинхронных электродвигателей при помощи дросселей насыщения состоит в том, что в цепь статора электродвигателя включаются реактивные сопротивления с переменной индуктивностью.
 Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а).
Изменение индуктивности реактивных сопротивлений (дросселей) осуществляется пропусканием постоянного тока различной величины через обмотку управления дросселями (рис. 7.13, а). Изменяемое индуктивное сопротивление в цепи статора электродвигателя позволяет получать на зажимах машины различное напряжение (рис. 7.13, б), чем достигается изменение скольжения, т. е. скорости вращения ротора. Достоинством описанного способа является плавное регулирование скорости вращения электродвигателя; недостатками — значительное уменьшение максимального вращающего момента, а также уменьшение коэффициента мощности и к. п. д. электродвигателя.
Регулирование скорости вращения асинхронного электродвигателя за счет изменения числа пар полюсов осуществляется переключением обмотки статора и является ступенчатым. Для этих целей применяют специальные асинхронные многоскоростные электродвигатели, выпускаемые промышленностью и рассчитанные на 2, 3 и 4 скорости. Так, например, четырех скорости ой электродвигатель может иметь синхронные скорости вращения 500, 750, 1000 и 1500 об/мин.

Рис. 7.13. Схема включения и регулирования скорости асинхронных двигателей с короткозамкнутым ротором при помощи дросселей насыщения:
а — схема включения; б — механические характеристики
Рис. 7.14. Переключение проводов для изменения направления вращения асинхронного двигателя
Изменение числа пар полюсов достигают наиболее простым способом при устройстве двух независимых обмоток на статоре асинхронного электродвигателя. Такие электродвигатели выпускают с синхронными скоростями вращения 1000/1500 об/мин.
Двухскоростные электродвигатели имеют шесть, трехскоростные— девять и четырехскоростные — двенадцать выводов к переключателю полюсов.
Регулирование скорости вращения асинхронного электродвигателя изменением частоты тока требует применения специального источника переменного тока с изменяемой частотой. Этот способ еще не нашел применения для регулирования скорости электроприводов строительных машин, но является весьма перспективным при использовании для статических преобразователей частоты управляемых, полупроводниковых вентилей-тиристоров, производство которых в настоящее время развивается (о тиристорах см. гл. 10).
гл. 10).
Изменение направления вращения асинхронного двигателя — реверсирование достигается изменением направления вращения магнитного
поля. Для этого достаточно переключить любые два провода трехфазной системы, подводящие ток к статору двигателя. На рис. 7.14 приведена схема такого переключения. При переключении трех проводов направление вращения магнитного поля статора, а следовательно, и ротора двигателя не изменится.
§ 7.9. Потери энергии и коэффициент полезного действия асинхронных электродвигателей. Коэффициент мощности двигателей
Электрическая энергия, расходуемая при работе асинхронного электродвигателя, затрачивается на полезную механическую работу и на покрытие потерь: электрических, магнитных и механических.
Потери в меди или электрические потери обусловлены нагреванием обмоток статора и ротора при протекании по ним тока. Потери в стали (магнитные потери) состоят из потерь на вихревые токи и на перемагничивание в стальных частях статора и ротора. Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Потери на вихревые токи пропорциональны квадрату частоты тока, а на перемагничивание — первой степени частоты тока. Магнитные потери главным образом происходят в статоре. Потери в стали ротора ничтожно малы вследствие малой частоты его тока и поэтому ими можно пренебрегать.
Механические потери состоят из расхода энергии на трение в подшипниках, трение ротора о воздух и воздуха в вентиляционной системе электродвигателя. Эти потери зависят от скорости вращения ротора, его диаметра, типа подшипников и конструкции вентиляционной системы двигателя.
Коэффициентом полезного действия (к. п. д.) двигателя называют отношение полезной механической мощности Р3 на валу двигателя к затраченной мощности, потребляемой из сети P1
(7-8)
Так как разница между затраченной и полезной мощностью равна потерям, то формулу получения к. п. д. двигателя можно записать в следующем виде:
(7.9)
где рм — потери в меди или электрические потери; рс — потери в стали или магнитные потери;
Рмех — механические потери.
Потери в меди являются переменными, зависящими от нагрузки, вследствие того что с увеличением тока увеличивается назревание обмоток.
Потери в стали (магнитные) и механические потери являются постоянными, так как не зависят от нагрузки.
Коэффициент полезного действия двигателя изменяется в зависимости от нагрузки.
Наибольшей величины к. п. д. достигает при нагрузке, равной примерно 0,75 номинальной, а затем с увеличением нагрузки к. п. д. уменьшается вследствие увеличения электрических потерь на нагревание обмоток (рис. 7.15, а).
Большое магнитное сопротивление воздушного зазора между статором и ротором асинхронного двигателя приводит к значительной величине намагничивающего (реактивного) тока, составляющего примерно 0,4—0,7 от номинальной силы тока электродвигателя. В связи с этим двигатель всегда работает с cos φ, меньшим единицы. При полной нагрузке коэффициент мощности cos φ двигателей достигает максимальной величины 0,8—0,9 (рис. 7.15, б).
Рис. 7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
7.15. Зависимость коэффициента мощности асинхронного двигателя от его нагрузки
С уменьшением нагрузки коэффициент мощности снижается, что объясняется малой зависимостью от нагрузки намагничивающего (реактивного) тока. Сила тока двигателя складывается из двух величин: активного тока, зависящего от нагрузки, и реактивного тока, независимого от нагрузки. Поэтому при механической недогрузке активный ток уменьшается и, следовательно, увеличивается относительная величина реактивного тока, что приводит к снижению коэффициента мощности cos φ.
- Назад
- Вперёд
- Назад
- Вы здесь:
- Главная
- Книги
- Учеба
 org/ListItem»> Устройство ЭС, ПС и ЛЭП
org/ListItem»> Устройство ЭС, ПС и ЛЭП
Еще по теме:
- В помощь сельскому электромонтеру
- Электроснабжение в строительстве
- Электромонтер строительной площадки
- Электрооборудование и автоматизация сельскохозяйственных агрегатов
- Электрические аппараты и оборудование выше 1000В
Virtual Labs
Введение
Асинхронный двигатель с фазным ротором или асинхронный двигатель с контактными кольцами имеет статор, аналогичный асинхронному двигателю с короткозамкнутым ротором, но ротор с изолированными обмотками, выведенными через контактные кольца и щетки. Однако на токосъемные кольца мощность не подается. Их единственная цель состоит в том, чтобы обеспечить последовательное подключение сопротивления к обмоткам ротора при запуске.
Рис. : Эквивалентная схема асинхронного двигателя с контактными кольцами.
Характеристики контактного кольца
Двигатель с контактным кольцом или двигатель с фазной обмоткой представляет собой асинхронный двигатель, который можно запустить при полном сетевом напряжении, приложенном к клеммам его статора. Выводы обмотки ротора двигателя с фазным ротором соединены с тремя контактными кольцами, установленными на валу, но изолированными от него. Выводы от трех щеток, нажимающих на эти контактные кольца, подведены к внешним сопротивлениям. В момент пуска величина пускового тока регулируется добавлением внешнего сопротивления в цепь его ротора. По мере увеличения скорости ротора внешнее сопротивление постепенно уменьшается, так что крутящий момент двигателя стремится оставаться максимальным в течение периода ускорения. Наконец, при нормальной работе внешнее сопротивление полностью отключается, а токосъемные кольца замыкаются накоротко, так что теперь двигатель развивает полный крутящий момент нагрузки при низком значении токосъемных колец. Следует отметить, что «скольжение, необходимое для создания максимального крутящего момента, прямо пропорционально сопротивлению ротора». Таким образом, очевидно, что скольжение увеличивается с увеличением внешнего сопротивления.
Выводы обмотки ротора двигателя с фазным ротором соединены с тремя контактными кольцами, установленными на валу, но изолированными от него. Выводы от трех щеток, нажимающих на эти контактные кольца, подведены к внешним сопротивлениям. В момент пуска величина пускового тока регулируется добавлением внешнего сопротивления в цепь его ротора. По мере увеличения скорости ротора внешнее сопротивление постепенно уменьшается, так что крутящий момент двигателя стремится оставаться максимальным в течение периода ускорения. Наконец, при нормальной работе внешнее сопротивление полностью отключается, а токосъемные кольца замыкаются накоротко, так что теперь двигатель развивает полный крутящий момент нагрузки при низком значении токосъемных колец. Следует отметить, что «скольжение, необходимое для создания максимального крутящего момента, прямо пропорционально сопротивлению ротора». Таким образом, очевидно, что скольжение увеличивается с увеличением внешнего сопротивления.
С учетом приведенных выше заявлений давайте обсудим различные методы управления скоростью асинхронных двигателей с контактными кольцами:
- Управление реостатом ротора
- Каскадное управление
Регулирование скорости с помощью управления реостатом ротора
Внешний реостат, который используется для пуска этих двигателей с контактными кольцами, также может использоваться для управления скоростью. Но следует обратить внимание на то, что пусковой реостат должен быть рассчитан на «непрерывную» работу. С помощью того же реостата, добавленного в цепь ротора, можно регулировать скорость двигателей с контактными кольцами. Сопротивление максимально включено во время пуска и медленно отключается для увеличения скорости двигателя. При беге на полной скорости, если возникает необходимость снизить скорость, сопротивление медленно суммируется и, таким образом, скорость снижается. Чтобы понять управление скоростью, давайте рассмотрим приведенное ниже соотношение крутящего момента и проскальзывания.
Но следует обратить внимание на то, что пусковой реостат должен быть рассчитан на «непрерывную» работу. С помощью того же реостата, добавленного в цепь ротора, можно регулировать скорость двигателей с контактными кольцами. Сопротивление максимально включено во время пуска и медленно отключается для увеличения скорости двигателя. При беге на полной скорости, если возникает необходимость снизить скорость, сопротивление медленно суммируется и, таким образом, скорость снижается. Чтобы понять управление скоростью, давайте рассмотрим приведенное ниже соотношение крутящего момента и проскальзывания.
Где
Ом – скольжение двигателя,
Ом – сопротивление ротора.
Из приведенного выше соотношения видно, что по мере увеличения сопротивления ротора крутящий момент уменьшается. Но для заданной нагрузки двигатель и, следовательно, ротор должны обеспечивать одинаковый крутящий момент без какого-либо уменьшения. Таким образом, чтобы поддерживать постоянный крутящий момент, по мере увеличения сопротивления ротора увеличивается скольжение. Это увеличение скольжения есть не что иное, как уменьшение скорости двигателя. 9Потери 2 * R” также увеличиваются, что, в свою очередь, снижает КПД двигателя. Это можно интерпретировать как потерю, прямо пропорциональную уменьшению скорости. Поскольку потери больше, этот метод снижения скорости используется только в течение короткого периода времени.
Таким образом, чтобы поддерживать постоянный крутящий момент, по мере увеличения сопротивления ротора увеличивается скольжение. Это увеличение скольжения есть не что иное, как уменьшение скорости двигателя. 9Потери 2 * R” также увеличиваются, что, в свою очередь, снижает КПД двигателя. Это можно интерпретировать как потерю, прямо пропорциональную уменьшению скорости. Поскольку потери больше, этот метод снижения скорости используется только в течение короткого периода времени.
Резистор управления двигателем и краном
Управление двигателем с помощью резистора является универсальным методом управления скоростью. Резисторы используются для ограничения пускового тока и регулировки крутящего момента и скоростных характеристик двигателей переменного и постоянного тока.
В этом разделе представлены основные сведения о том, как резисторы используются для управления скоростью двигателя, а также информация, необходимая для проектирования блока резисторов.
Чтобы заказать блок резисторов, просто получите информацию о двигателе, необходимую для ваших конкретных требований, и свяжитесь с инженерным отделом завода Filnor Inc.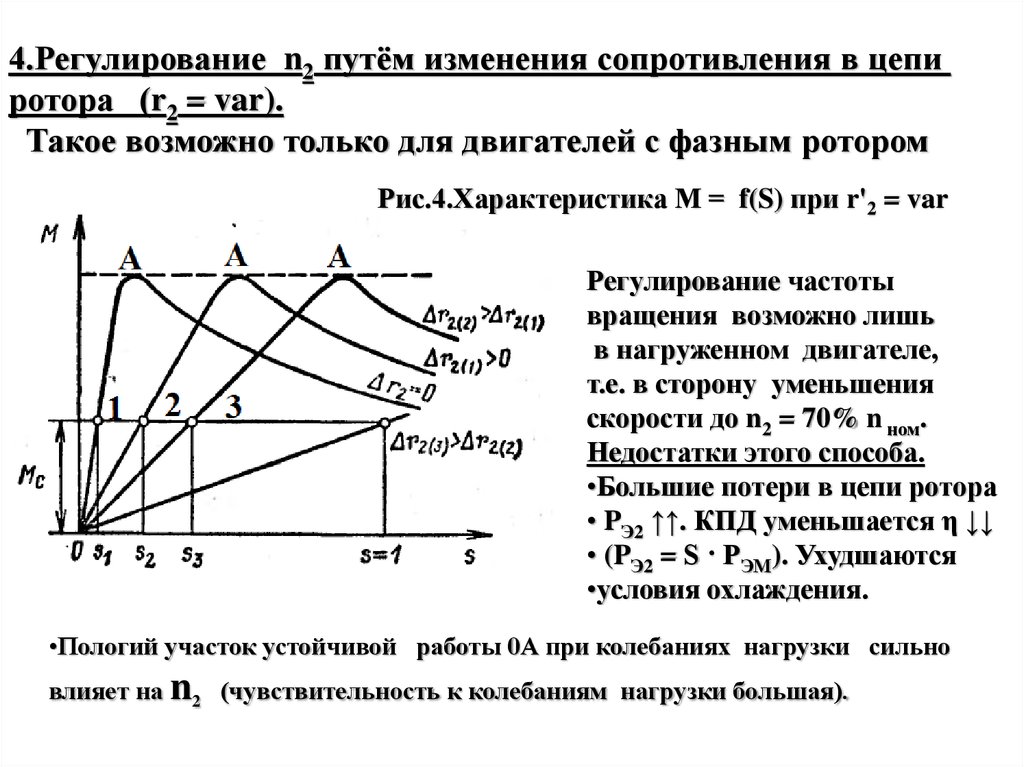 , чтобы спроектировать блок резисторов для вашего применения.
, чтобы спроектировать блок резисторов для вашего применения.
УПРАВЛЕНИЕ АИНХОННЫМ ДВИГАТЕЛЕМ С ОБМОТОЧНЫМ РОТОРОМ ПЕРЕМЕННОГО ТОКА
Для резисторов, используемых в двигателях с фазным ротором, резисторы подключаются звездой к ротору (вторичному) двигателя. Изменяя сопротивление ротора (через контактор), вы можете ограничить пусковой момент и скорость двигателя для вашего конкретного применения.
- Требования к данным:
Движение (подъем или перемещение)
Вторичное напряжение и ток
Класс NEMA (CL162, CL172, CL92)
Мощность в л.с. скорость / 4 ступени
Ускоряющий резистор на двигателе с фазным ротором переменного токаУПРАВЛЕНИЕ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
Для применений резисторов, используемых в двигателях с последовательным возбуждением постоянного тока, резисторы подключаются в соответствии с якорем двигателя и полем для снижения напряжения и тока применяется к двигателю. Резисторы снижают пусковое напряжение и ток двигателя, тем самым ограничивая пусковой ток (крутящий момент) двигателя.

- Требования к данным:
Движение (подъем или перемещение)
Производитель управления
Количество скоростей
Напряжение и ток
Мощность в л.с. , CL.172, CL.92)
Типовая схема управления реверсивным замыканием с использованием 3-х скоростного / 2-х ступенчатого ускоряющего резистора на двигателе постоянного тока с последовательной обмоткой
, резисторы подключены в линию с выводами двигателя, чтобы уменьшить напряжение, подаваемое на двигатель. Резисторы будут снижать пусковое напряжение двигателя, тем самым ограничивая пусковой ток (крутящий момент) двигателя. Резисторы называются «балластными резисторами» и обеспечивают плавный пуск двигателя.- Требования к данным:
Приложение
Первичное напряжение и ток
Мощность в л.с.
Количество скоростей
Типовая схема реверсивного управления с использованием 2-скоростного / 1-ступенчатого балластного резистора на двигателе переменного тока с короткозамкнутым ротором
STAR-DAR (WYYELTA) ПУСКОВОЙ ДВИГАТЕЛЬ
Для резисторов, используемых в двигателях типа «звезда»-треугольник (ЗАМКНУТЫЙ ПЕРЕХОД), резисторы подключаются к обмотке двигателя перед замыканием контактора треугольника.
- Требования к данным: