Создание вечного двигателя на неодимовых магнитах
Создание вечного двигателя на неодимовых магнитах
Неодимовый магнит — мощный постоянный магнит, состоящий из сплава редкоземельного элемента неодима, бора и железа.
Кто из нас в детстве не пытался или хотя бы не размышлял о том, чтобы построить вечный двигатель на постоянных магнитах? Казалось бы, если магниты отталкиваются друг от друга одноименными полюсами, то, наверное, можно найти такую конфигурацию магнитов, когда отталкивание станет действовать непрерывно, и сможет, например, вращать ротор «вечного» двигателя.
Однако, стоило нам попробовать реализовать эту идею практически, как тут же выяснялось, что в реальности ротор все равно находит такое положение, в котором останавливается. Словно ротор и вращался лишь для того, чтобы в конце концов найти эту точку и остановиться в ней. То есть неизбежно наступало устойчивое равновесие ротора.
Стремление термодинамических систем к равновесию
И это вовсе не удивительно, ведь ученым давно известно, что термодинамические системы стремятся к равновесию, и в конце концов пребывают в устойчивом равновесии (статическом или динамическом).
Из механики мы знаем, что тело покоится либо движется равномерно и прямолинейно, если на него не действуют никакие внешние силы, либо если действие этих внешних сил на тело скомпенсировано, то есть суммарная сила равна нулю (результирующее внешнее воздействие отсутствует).
Как вы понимаете, принцип стремления термодинамических систем к равновесию относится и к чисто механическим системам. Так, если система изначально пребывает в устойчивом равновесии (и конструкция с постоянными неодимовыми магнитами не является исключением), то при воздействии на такую конструкцию внешнего фактора, выводящего систему из равновесия, неизбежно возникнет реакция со стороны данной системы.
Это значит, что в системе начнут усиливаться процессы, стремящиеся уменьшить влияние внешнего фактора, который систему из равновесия вывел (Принцип Ле Шателье — Брауна).
Модель магнитного генератора индийского блогера с канала Creative Think:
Чтобы вызвать стремление к равновесию, необходимо создать условия не равновесия
Известный пример из электродинамики — правило Ленца. Если бы правило Ленца не работало, то электродвигатели не могли бы функционировать.
Если бы правило Ленца не работало, то электродвигатели не могли бы функционировать.
В электродвигателе электрический ток создает магнитное поле, которое заставляют ротор непрерывно искать равновесие, и чтобы ротор не останавливался, магнитное поле все время действует таким образом, что вынуждает ротор (даже под механической нагрузкой) постоянно догонять точку, в которой должно будет наступить равновесие.
Но при этом электрическим полем, действующим в проводниках, совершается работа, то есть расходуется энергия источника, ведь в двигателе есть как минимум трение вала о подшипники, на преодоление которого, даже если ротор не нагружен и двигатель работает вхолостую, требуется работа, то есть расход энергии.
Если бы трения (даже о воздух) не было, и вал не был бы нагружен, то ротор бы вращался очень долго, например в полном вакууме в отсутствие силы притяжения к Земле. Но тогда никакая работа этим ротором бы уже не совершалась, и это был бы уже не двигатель, а вращающийся без сопротивления кусок металла.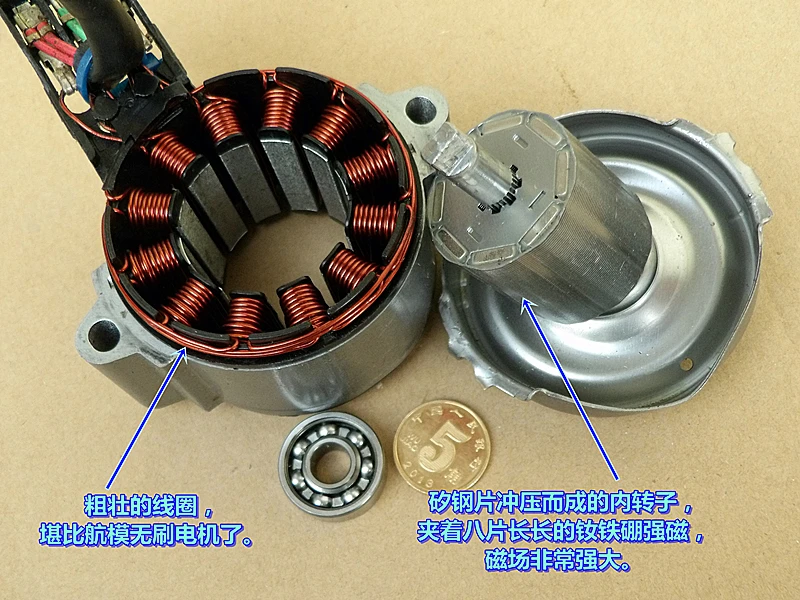
Вернемся теперь к постоянным магнитам. Для системы с постоянными магнитами предсказать направление протекания процесса уравновешивающей реакции несложно.
Так, еще в 90-е годы японский экспериментатор Кохеи Минато исследовал возможность создания непрерывного вращения используя постоянные магниты на роторе и статоре своего мотора. В конце концов он был вынужден также создавать изменяющееся магнитное поле, которое заставляло бы ротор искать равновесие.
Минато демонстрировал, как приближая или отдаляя постоянный магнит, можно вынудить ротор с постоянными магнитами вращаться. Но в итоге он просто дошел в экспериментах до двигателя с постоянными магнитами на роторе.
Никакого вечного двигателя не получилось. На изменение внешнего магнитного поля, от которого бы отталкивался ротор с магнитами, требуется энергия извне. То есть, для создания условий, в которых ротор с магнитами будет искать равновесие, необходимо параллельно совершать работу.
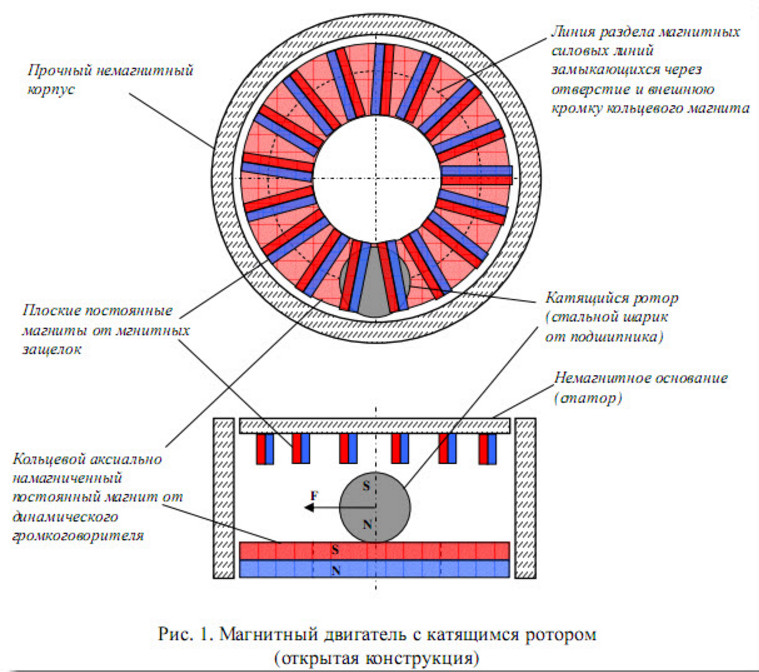
Еще одна модель магнитного генератора с Интернета:
Динамическое равновесие при низкотемпературной сверхпроводимости как частный случай
Рассмотрим крайний случай. Многие знают, что свинцовая катушка с током, помещенная в жидкий гелий, способна поддерживать ток (и магнитное поле тока) на протяжении многих лет, поскольку сопротивление проводника исчезает.
Почему сопротивление исчезает? Потому что колебания атомов в металле, обуславливающие электрическое сопротивление металла, прекращаются при критической температуре. Две такие катушки будут вести себя по отношению друг к другу как постоянные магниты. Но опять же, они найдут устойчивое равновесие и остановятся.
Движения под действием силы не будет, то есть двигателя совершающего работу не получится. Движущиеся в сверхпроводнике электроны также работы не совершают, хотя и пребывают в устойчивом динамическом равновесии.
Чтобы двигатель совершал работу — он обязан расходовать энергию, но откуда ей взяться?
Допустим, что двигатель на постоянных магнитах реально возможен.
А что это за энергия, если не энергия постоянных магнитов или не энергия подводимая извне? Раз по условию задачи энергия извне не подводится, значит остается энергия постоянных магнитов.
Однако, будучи просто расположены на роторе и статоре, магниты энергию не отдадут. Чтобы заставить магнит размагничиваться, необходимо совершить работу, то есть опять же подвести к устройству энергию извне. Остается делать выводы…
Ранее ЭлектроВести писали, что французский автопроизводитель Citroen официально представил обновленный кросс-хэтчбек C4, включая его электрическую версию Citroen ë-C4. Покупатель сможет выбрать бензиновый двигатель мощностью 100-155 л.с., дизельный двигатель мощностью 110-130 л.с. или электрическую установку мощностью 100 кВт (136 л.
По материалам: electrik.info.
ПОСТОЯННЫЕ МАГНИТНЫЕ МОТОРЫ с фиксированной или переменной скоростью
Электровигатели С Постоянными Магнитами: Лучшие По Эффективности И Производительности.
Двигатели с постоянными магнитами серии OMPM, разработанные и изготовленные OME Motors, являются лучшей моделью по эффективности, мощности и размерам среди доступных на рынке. Это специальные синхронные электродвигатели с магнитными стержнями, добавленными к ротору, которые увеличивают тягу и делают двигатели более эффективными с точки зрения производительности и минимум энергозатрат. Поэтому двигатели с постоянными магнитами — более мощные, чем общепромышленные низковольтные электродвигатели IE4: фактически, при той же мощности, двигатели серии OMPM имеют меньшие габариты и более высокий уровень эффективности. Кроме того, благодаря их малому весу и малому объему, синхронные двигатели с постоянными магнитами экономят пространство, компрессируя высокую мощность в уменьшенный габарит электроустройства.
Двигатели с постоянными магнитами, разработанные и изготовленные OME Motors под заказ, управляются и работают с преобразователем частоты, который гарантирует постоянный крутящий момент в широком диапазоне скоростей, работая даже на самых низких уровнях скорости с отличной эффективностью. Поэтому этот тип двигателей также можно считать электродвигателями постоянного тока с постоянными магнитами.
Высокий Уровень Эффективности И Максимальные Преимущества: Узнайте Больше Об Электродвигателях на Постоянных Магнитах.
Электродвигатели постоянного тока на постоянных магнитах способны обеспечить максимальную мощность в уменьшенном габарите. В частности, они имеют следующие преимущества:
- Высокий уровень технологий.
- Высокая мощность и эффективность с точки зрения производительности и энергопотребления (каждый электродвигатель с постоянными магнитами).
- Высокая плотность мощности для используемого габарита.
- Длительный срок службы, устойчивость и надежность с течением времени.
- Уменьшенный вес и объем для компактного дизайна.
- Всевозможные монтажные исполнения и взаимозаменяемость, гарантируемая конструкцией каждого двигателя на постоянных магнитах.
- Меньшая потеря энергии и температуры благодаря высокой эффективности электродвигателей с постоянными магнитами.
- Переменная скорость.
- Точный контроль и работа при низких температурах, также на низких скоростях.
- Низкий уровень шума.
Синхронные Двигатели С Постоянными Магнитами: Максимальная Производительность Для Каждого Типа Промышленного Применения.
Благодаря своим передовым и инновационным функциям, электродвигатели с постоянными магнитами, разработанные и изготовленные OME Motors, идеально подходят для самых разных промышленных областей применения. В целом, эти двигатели, с характеристиками высочайшего ранга и максимальной эффективностью, могут использоваться во всех промышленных применениях, которые требуют изменение скорости и постоянного крутящего момента даже на низких скоростях. В частности, синхронные двигатели с постоянными магнитами могут использоваться на электростанциях, системах очистки, системах опреснения воды, в очистных сооружений, а также в пищевой промышленности. Эти электродвигатели эффективно работают в сочетании с насосами, компрессорами, дробилками и измельчителями, вентиляторами и воздуходувками, конвейерными лентами, системами отопления, вентиляции и кондиционирования воздуха (HVAC).
В частности, синхронные двигатели с постоянными магнитами могут использоваться на электростанциях, системах очистки, системах опреснения воды, в очистных сооружений, а также в пищевой промышленности. Эти электродвигатели эффективно работают в сочетании с насосами, компрессорами, дробилками и измельчителями, вентиляторами и воздуходувками, конвейерными лентами, системами отопления, вентиляции и кондиционирования воздуха (HVAC).
Тяговые двигатели на постоянных магнитах в электроприводе автомобиля Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
УДК 621.313.4
Тяговые двигатели на постоянных магнитах в электроприводе автомобиля
Иван Александрович Бербиренков, аспирант, e-mail: [email protected]
Вячеслав Васильевич Лохнин, д. т. н., проф., каф. «Электротехника и компьютеризированные электромеханические системы»
ФГОУ ВПО «Московский государственный технический университет «МАМИ», Москва
Представлен сравнительный анализ тяговых электроприводов с различными типами тяговых электродвигателей; показано, что наиболее перспективным является тяговый электропривод с вентильным двигателем с возбуждением от постоянных магнитов; рассмотрено использованию в этих двигателях конструкции роторов коллекторного и когтеобразного типов для обеспечения максимально возможной концентрации магнитного потока в рабочем воздушном зазоре.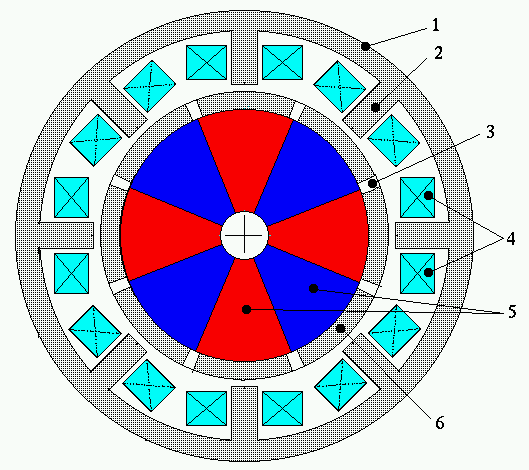
The article presented a comparative analysis of the traction motors with various types of traction motors. It is shown that the most promising is the traction drive with brushless drive with permanent magnet excitation. The authors the use of these engines, rotor design of the collector and claw types to ensure the highest possible concentration of magnetic flux in the working air gap.
Ключевые слова: вентильный тяговый двигатель, тяговый электропривод, двигатели с возбуждением от постоянных магнитов.
Keywords: valve drive motor, traction, engines with permanent magnet excitation.
Тип тягового электродвигателя определяется на начальном этапе проектирования электромобиля, потому что от этого зависит компоновка транспортного средства. Выбор того или иного тягового электродвигателя в электроприводе электромобиля обусловлен, прежде всего, областью применения электромобиля.
Также при этом очень важно учитывать такие факторы, как КПД и собственная масса привода, поскольку они влияют на время работы тяговых аккумуляторных батарей, которые имеют ограниченный запас энергии и значительную массу. Тяговые аккумуляторные батареи являются источником питания тягового вентильного двигателя, и от них зависит время работы и максимальная развиваемая мощность привода.
Целью работы является сравнение тяговых электроприводов с различными типами тяговых электродвигателей (постоянного тока, асинхронный переменного тока, вентильный с возбуждением от постоянных магнитов) и выбор наилучшего варианта для использования в электромобиле.
Базовыми требованиями, предъявляемыми к тяговому электроприводу, являются простота изготовления, надежность, удобство обслуживания, легкость регулирования, простота системы управления, высокий момент во всем диапазоне частот вращения, пригодность для рекуперативного торможения и высокий КПД.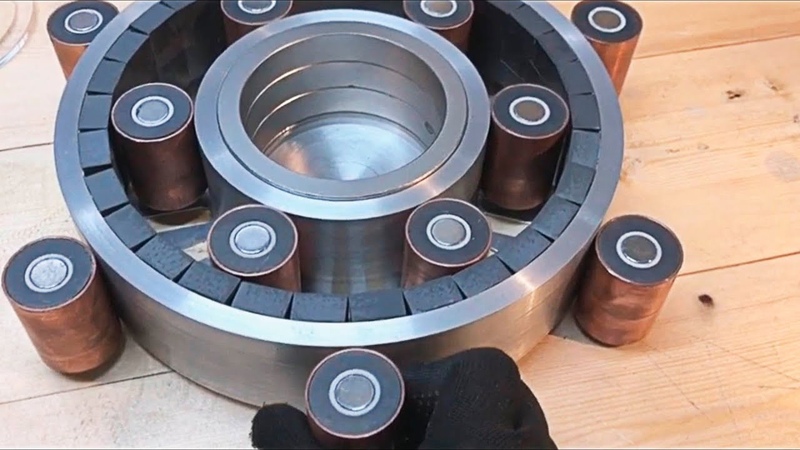 Покажем, что наилучшим образом этим требованиям удовлетворяет тя-
Покажем, что наилучшим образом этим требованиям удовлетворяет тя-
говый вентильный двигатель с возбуждением от постоянных магнитов [1].
Тяговые электроприводы с тяговыми электродвигателями постоянного тока обладают несомненными достоинствами, но следует отметить их основной и очень существенный недостаток — наличие механического контакта в щеточно-коллекторном узле.
Поэтому тяговые электроприводы с тяговым электродвигателем переменного тока (асинхронными и синхронными), несмотря на свою сложную и дорогую систему регулирования, оказываются более надежными, легкими и долговечными.
Асинхронные тяговые электродвигатели впервые были использованы на опытных электромобилях фирмы General Motors, которая в полной мере реализовала их преимущества.
Далее рассмотрим более подробно особенности тяговых электроприводов с синхронными тяговыми электродвигателями. < 1 [3].
< 1 [3].
В тяговых электроприводах с вентильными двигателями с возбуждением от постоянных магнитов отсутствуют скользящие электрические контакты, что существенно повышает их ресурс и надежность. Эти двигатели конструктивно просты и не требуют затрат энергии на возбуждение.
Рис. 1. Структурная схема тягового электропривода с вентильным двигателем с возбуждением от постоянных магнитов: ИП — источник питания; БВП — бортовой вентильный преобразователь; ВДПМ — тяговый вентильный двигатель с возбуждением от постоянных магнитов; ТГ — тахогенератор; ДПР — датчик положения ротора
Для обеспечения минимальных массы и габаритных размеров двигателя с возбуждением от постоянных магнитов необходимо выбирать многополюсный ротор с 2р > 6 (где 2р — число полюсов ротора). При этом для возбуждения двигателя следует применять высококоэрцитивные постоянные магниты на основе ферритов бария или стронция, а также редкоземельных элементов — кобальта и соединения «неодим-железо-бор».
Существуют следующие конструктивные исполнения ротора с параллельным включением постоянных магнитов по магнитному потоку: когтеобразный ротор и ротор с коллекторным размещением постоянных магнитов [1].
Конструкция когтеобразного ротора в многополюсном варианте (рис. 2) содержит цилиндрический постоянный магнит (как правило, из феррита бария или стронция), намагниченный по оси цилиндра, и когтеобразную систему из магнитомягкого материала.
Конструкция ротора с коллекторным размещением постоянных магнитов (рис. 3) более универсальна с точки зрения использования магнитного материала: в ней эффективны все высококоэрцитивные постоянные магниты. Дополнительным достоинством этой конструкции является возможность концентрации магнитного потока не только путем изменения числа полюсов, но и за счет увеличения длины ротора, вследствие чего он заметно выступает из-за лобовых частей обмотки статора.
Рис. 2. Когтеобразный ротор: 1 — неподвижный магнитопро-вод шунта; 2 — обмотка возбуждения; 3 — кольцо, объединяющее полюса одной полярности; 4 — полюса; 5 — магнит; 6 — втулка; 7 — вал
Основным достоинством когтеобразного ротора являются его конструктивная простота и надежность, а недостатком — заметное межполюсное рассеяние.
Рис. 3. Ротор с коллекторным размещением постоянных магнитов: 1 — вал; 2 — постоянный магнит; 3 — магнитомягкие полюсные секторы; 4 — немагнитная втулка
Основной недостаток конструкции ротора коллекторного типа — сложность обеспечения достаточной механической прочности, в особенности на высоких частотах вращения [4].
В качестве перспективных предлагаются два варианта привода ведущих колес электромобиля: безредукторный (с мотор-колесами) и с понижающим редуктором.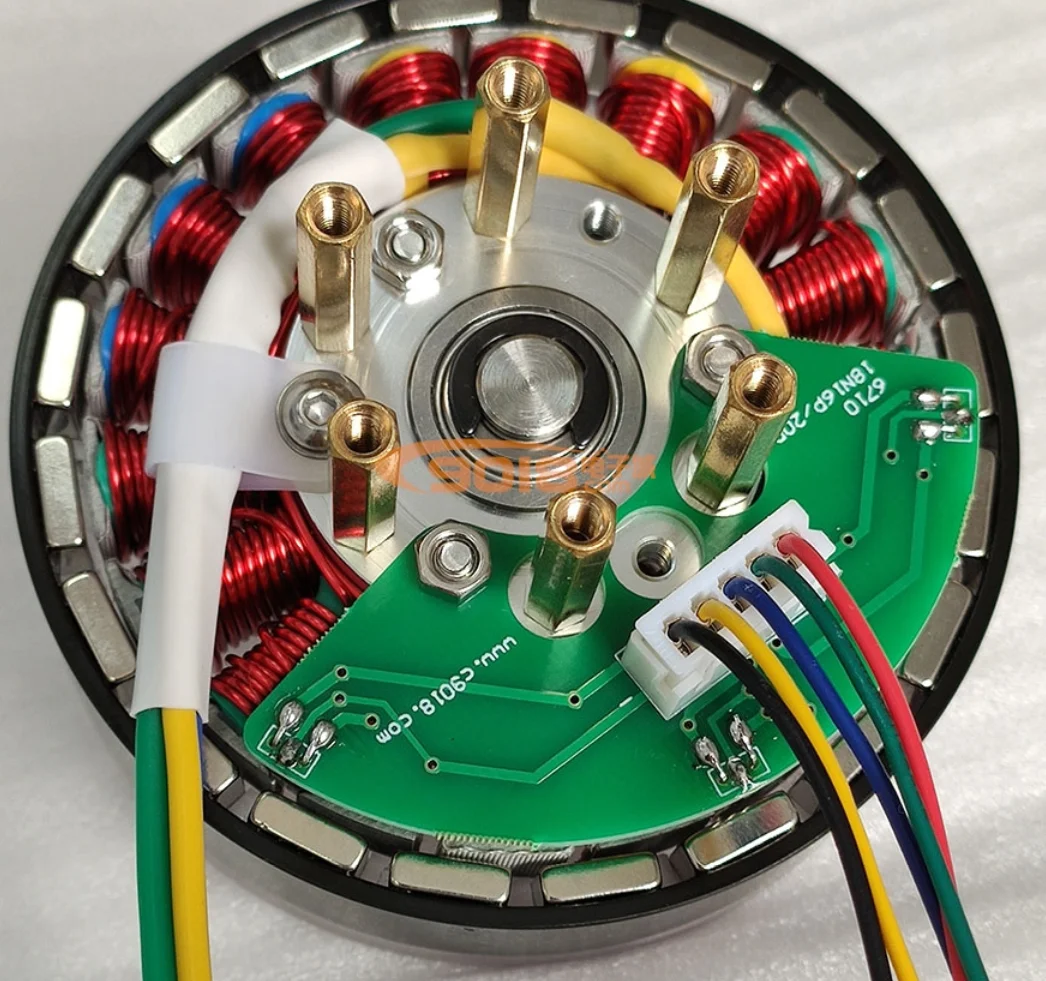 Поскольку в первом варианте есть жесткое ограничение по наружному диаметру вентильного двигателя с возбуждением от постоянных магнитов (ограничение диаметром колеса) и максимальной частоте вращения, то на основании оптимизационных расчетов было показано, что наилучший результат в этом случае достигается при применении высокоэнергетических постоянных магнитов на основе соединения «не-одим-железо-бор».
Поскольку в первом варианте есть жесткое ограничение по наружному диаметру вентильного двигателя с возбуждением от постоянных магнитов (ограничение диаметром колеса) и максимальной частоте вращения, то на основании оптимизационных расчетов было показано, что наилучший результат в этом случае достигается при применении высокоэнергетических постоянных магнитов на основе соединения «не-одим-железо-бор».
Во втором варианте (с приводом колес через понижающий редуктор и дифференциал) нет жестких вышеуказанных ограничений, поэтому целесообразно применять дешевые ферритовые постоянные магниты.
Характеристики разработанных тяговых электроприводов с вентильным двигателем с возбуждением от постоянных магнитов на основе соединения «неодим-железо-бор» и жидкостной системой охлаждения [2] приведены в табл. 1.
Таблица 1. Характеристики модификаций тяговых электроприводов с вентильными двигателями с возбуждением от постоянных магнитов
Параметр ТЭП-12 ТЭП-17
Напряжение источника питания, В 120 220
Мощность, кВт:
номинальная; 12 17
максимальная 25 40
Частота вращения, об/мин:
номинальная; 2500 5000 2500 5000
максимальная 6500 13000 6500 13000
Номинальный ток, А 230 240 200 200
Максимальный ток, А 500 500 500 500
КПД, % 94 94 94 94
Диаметр ВДПМ, мм 168 145 168 145
Длина ВДПМ, мм 280 220 500 350
Масса ВДПМ, кг 34 13,6 67 26,4
Таблица 2.
Тип тягового электродвигателя
Параметры Постоянного тока Асинхронный переменного тока Вентильный с возбуждением от постоянных магнитов
Максимальная мощность, кВт 40 40 40
Максимальный ток, А 410 500 192
Частота вращения, об/мин: номинальная; 2200 3000 5000
максимальная 6700 8000 13000
Масса тягового двигателя, кг 92 70 26,4
Масса вентильного преобразователя, кг 8 22 22
Масса тягового электропривода, кг 109 92 48,4
КПД, % 75 85 94
Стоимость тягового электропривода, у. е. 2500 5000 5400
Из табл. 1 видно, что при различных исполнениях двигателей может быть получен одинаковый КПД.
В заключение приведем результаты сравнительного анализа основных характеристик [2] тяговых электроприводов с тяговыми электродвигателями различного типа (табл. 2).
Таким образом, сравнение тяговых электроприводов с различными типами тяговых электродвигателей (постоянного тока, асинхронный, вентильный с возбуждением от постоянных магнитов) показывает, что наиболее перспективным является тяговый электропривод с вентильным двигателем с возбуждением от постоянных магнитов, который в 1,5…2,5 раза легче, имеет максимальный КПД и лучшие регулировочные характеристики.
Тяговые электродвигатели на постоянных магнитах с роторами когтеобразного или коллекторного типов обеспечивают бесконтактность электроприво-
да, имеют высокую надежность и относительно невысокую стоимость, обладают конкурентоспособными удельными массогабаритными показателями; они выполнены на дешевых и доступных постоянных магнитах из феррита бария или стронция.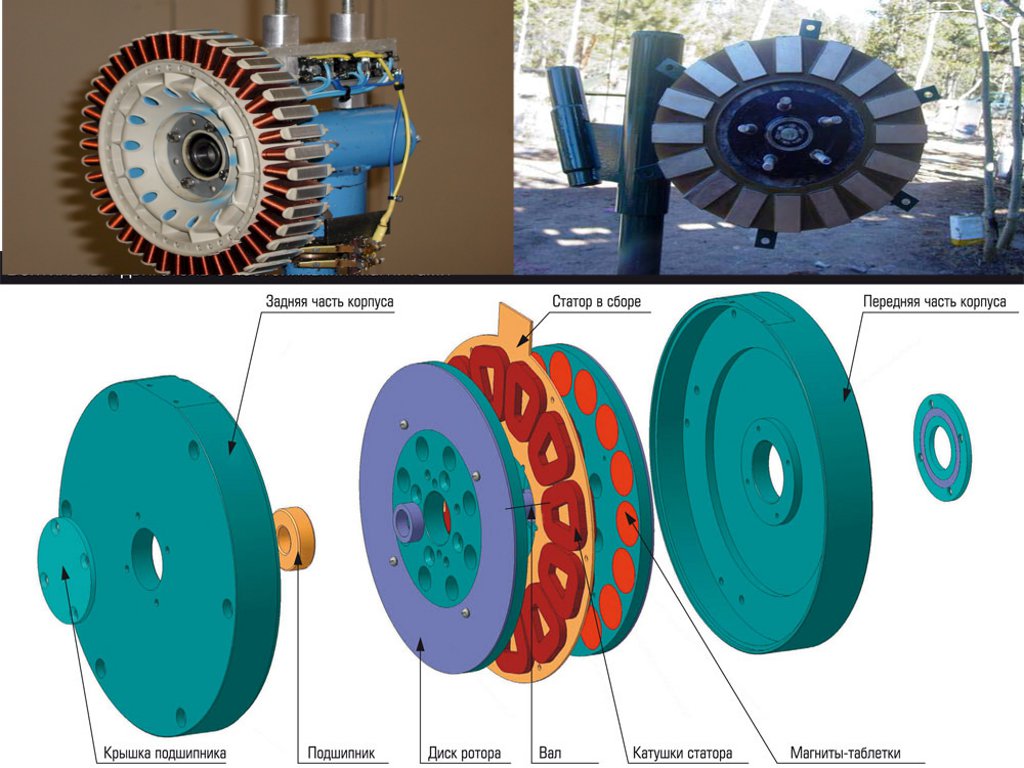
ЛИТЕРАТУРА
1. Лохнин В. В. Бесконтактный тяговый электродвигатель в структуре вентильного электропривода // Сб. научн. тр. «Электромеханические системы» / под ред. А.В. Лепеш-кина. М: МГТУ «МАМИ», 1995. С. 38 — 43.
2. Гурьянов Д. И. Концепция гибридного микроавтобуса с индивидуальным электроприводом колес // Тезисы докл. XXXIX Междунар. научн.-техн. конф. «Приоритеты развития отечественного автотракторостроения». М.: МГТУ «МАМИ». 2002. С. 12 — 15.
3. Вольдек А. И. Электрические машины // М.: Энергия. 1984. С. 743 — 749.
4. Онищенко Г. Б. Электрический привод // М.: Издательский центр «Академия». 2006. С.157 — 163.
Поступила 02.03.2011 г.
В Германии создали автомобильный электродвигатель без постоянных магнитов — дешевле, экономичнее и эффективнее
Немецкая компания Mahle разработала автомобильный электродвигатель без постоянных магнитов. Это позволит снизить зависимость от китайских поставок редкоземельных металлов и сделает электромоторы дешевле. Также отсутствие постоянных магнитов позволило повысить КПД электродвигателей на всех режимах работы. Для индустрии электромобилей новый двигатель обещает заметный прорыв в характеристиках машин и снижение стоимости обслуживания.
Это позволит снизить зависимость от китайских поставок редкоземельных металлов и сделает электромоторы дешевле. Также отсутствие постоянных магнитов позволило повысить КПД электродвигателей на всех режимах работы. Для индустрии электромобилей новый двигатель обещает заметный прорыв в характеристиках машин и снижение стоимости обслуживания.
Источник изображения: Mahl
В подавляющем большинстве современных электродвигателей для электрического транспорта используются постоянные магниты преимущественно из редкоземельных металлов. Всё бы ничего, только руку на пульсе поставок этого сырья держит Китай и довольно жёстко регулирует этот рынок.
Руду с содержанием редкоземельных металлов добывают во многих частях мира, но производство по переработке в основном сосредоточено в Китае, где рабочая сила дешевле, а экологические нормы не такие строгие. Как результат, за последнее десятилетие цена на неодим выросла на 750 %, а стоимость диспрозия выросла на 2000 % и, очевидно, это не предел. Подобная ситуация заставляет разработчиков создавать электродвигатели без постоянных магнитов, заменяя их катушками индуктивности в составе ротора двигателя. Однако это тянет за собой массу проблем.
Подобная ситуация заставляет разработчиков создавать электродвигатели без постоянных магнитов, заменяя их катушками индуктивности в составе ротора двигателя. Однако это тянет за собой массу проблем.
Источник изображения: Mahl
Для передачи электрического тока на катушки в роторе требуется создать надёжные и долговечные скользящие контактные передачи. Высокие токи и постоянная нагрузка делают такие узлы менее надёжными, что недопустимо для электротранспорта с высокой эксплуатационной нагрузкой. Инженеры компании Mahle смогли обойти эту проблему, предложив схему индукционной (беспроводной) передачи тока на катушки в роторе. Это практически как беспроводная зарядка смартфона.
Источник изображения: Mahl
По словам создателей, предложенная конструкция показала высочайшую эффективность, поскольку позволяет регулировать силу магнитного поля, генерируемую катушками в роторе, в соответствии с рабочей нагрузкой и режимом работы электродвигателя. Получился своего рода «умный» электродвигатель, КПД которого на высоких оборотах достигает 95 %.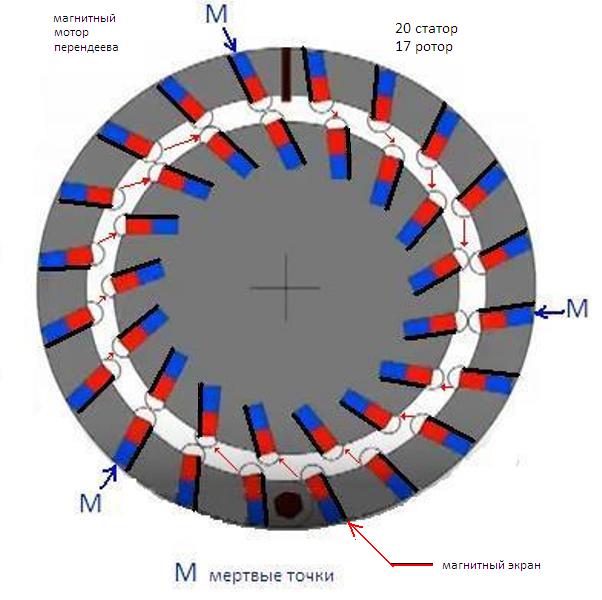 Также двигатель без скользящих контактов можно обслуживать гораздо реже, что экономит время и деньги на поддержание транспортной системы в порядке.
Также двигатель без скользящих контактов можно обслуживать гораздо реже, что экономит время и деньги на поддержание транспортной системы в порядке.
Источник изображения: Mahl
Как уверяют в Mahle, новые электродвигатели пригодны как для легковых автомобилей, так и для грузового и пассажирского транспорта. Образцы электродвигателей уже рассылаются заинтересованным автопроизводителям, а внедрение в массовое производство ожидается примерно через два с половиной года.
Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER.
Электродвигатели Parker Hannifin
Электродвигатели.
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели.
Серия GVM.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV.
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.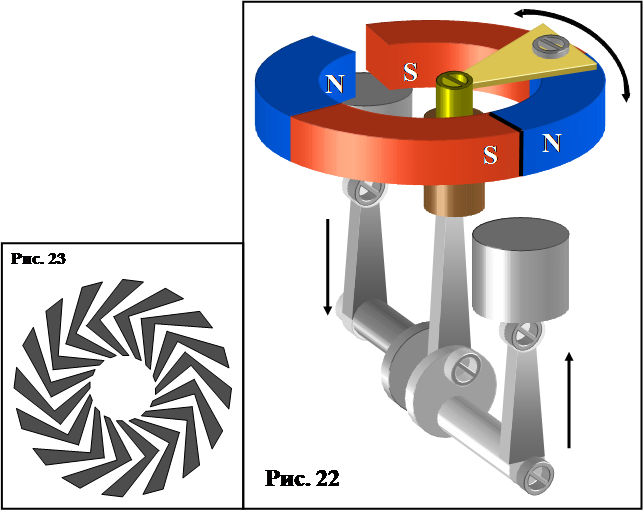
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц. ).
).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Тип: асинхронный.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Технология встроенных магнитов в бесщеточных серводвигателях
Наше предприятие Орион-мотор специализируется на инновационных проектах в области систем электропривода, технологии и автоматизации производства (разработка и изготовление).
У нас
имеются новые технические решения по линейным и роторным синхронным моторам на
постоянных магнитах (прямой привод),
по энергосберегающим и регулируемым
асинхронным двигателям, а также по координатным
системам, электроприводам и оборудованию для различных отраслей
промышленности, в том числе для станкостроения, электроники,
металлургии и электротранспорта.
ТЕХНОЛОГИЯ ВСТРОЕННЫХ МАГНИТОВ
В БЕСЩЕТОЧНЫХ СЕРВОДВИГАТЕЛЯХ
Франк Дж. Бартос
Использование технологии встроенных магнитов в бесщеточных двигателях, по сравнению с технологией поверхностных постоянных магнитов, позволяет увеличить производительность приводов за счет возрастания плотности потока магнитного поля при сохранении высокого крутящего момента на больших скоростях вращения.
Синхронные двигатели с постоянными магнитами (бесщеточные серводвигатели) построены на основе намагниченного ротора, вращающегося в магнитном поле и создающего необходимый крутящий момент. Как правило, магниты располагают на внешней поверхности ротора, чем обеспечивается простота конструкции, хорошие динамические характеристики во многих задачах и сравнительно низкая стоимость. Отсюда название двигатели с поверхностными постоянными магнитами (surface permanent magnet, SPM).
|
|
|
Существуют две модификации роторов со встроенными магнитами, которые устанавливаются в бесщеточных двигателях серии Goldline компании Danaher Motion: среднеинерционные роторы (серии M) с увеличивающим момент инерции цилиндром показаны на рисунке, и малоинерционные (серии В, на рисунке не показаны). К дополнительному оборудованию относится система водяного охлаждения, позволяющая достичь уровня мощности свыше 70 л. с. |
Для создания бесщеточных двигателей большей мощности существует другая технология, основанная на использовании встроенных постоянных магнитов (interior permanent magnet, IPM). Ее также называют технологией внутренних, утопленных или скрытых магнитов. Вне зависимости от названия идея одна располагать магниты непосредственно внутри ротора, чтобы увеличить скорость и крутящий момент, а также улучшить другие характеристики. В данной статье используется название встроенные магниты.
Форма и особенности магнитной конфигурации ротора со встроенными магнитами приводят к возникновению момента магнитного сопротивления и к увеличению плотности потока поля. Этот дополнительный момент может увеличить выходную мощность, но для этого требуется более сложный сервоусилитель и алгоритм управления. Особая форма ротора упрощает использование не имеющих датчиков систем обратной связи, если этого требует задача.
Одно из самых очевидных преимуществ встраивания магнитов состоит в уменьшении диаметра ротора и, как следствие, в уменьшении момента инерции. Пол Вебстер (Paul Webster), менеджер по сервосистемам в компании GE Fanuc, обращает внимание на высокую скорость и ускорение двигателей со встроенными редкоземельными магнитами, например Nd-Fe-B. Технология встроенных в ротор магнитов позволяет оптимизировать форму сердечника статора, чтобы добиться строго синуоидального распределения магнитного поля. Благодаря встроенным магнитам также ослабляется магнитное насыщение, возникающее из-за реакции якоря, утверждает Вебстер.
Еще одно преимущество технологии встроенных магнитов механически прочный, хорошо сбалансированный ротор. По словам Вебстера, встроенные магниты не могут сломаться или отлететь, поэтому не стоит опасаться повреждений ротора и/или подшипников при высоких скоростях вращения. Действительно, среднее время безотказной работы двигателей последней линейки GE Fanuc Alpha достигло впечатляющего значения в 1,4 миллиона часов, утверждает он.
|
|
|
Такие конструкции, уменьшающие момент от помех поля в момент трогания и улучшающие плавность подачи, компания GE Fanuc реализует в своих серводвигателях для станков с ЧПУ. Ассиметричное периферийное расположение открытых ферритовых магнитов (А) используется, когда для стабильной работы необходима значительная инерционность. В более компактной конструкции со сборным ротором (В) применяются редкоземельные магниты, благодаря чему достигается высокая скорость и ускорение |
По словам Вебстера, крутящий момент, вызванный помехами поля в момент трогания, составляет в IPM двигателях всего 0,05% от номинального момента, что значительно лучше, чем при использовании технологии поверхностных магнитов. В основном, эти двигатели используются в станках с ЧПУ, где требуется высокая точность и высокая скорость подачи. Высокая точность станка обеспечивается, благодаря низкому уровню момента, вызванного помехами в момент трогания.
Ли Стивенс (Lee Stephens), системный инженер в компании Danaher Motion, отмечает, что практически все бесщеточные серводвигатели построены на базе вращающихся постоянных магнитов, расположенных либо на поверхности ротора, либо внутри него. Встроенные магниты создают поле с подходящей двигателям высокой мощности геометрией, считает Стивенс.
По словам Стивенса, технология поверхностных магнитов упрощает конструкцию. Заранее заготовленные магниты, предназначенные для создания поля в двигателе, просто приклеиваются к сердечнику ротора. Технология SPM экономична, особенно в маломощных системах, подобных модели NEMA 34 или более компактным двигателям. Технология встроенных постоянных магнитов предлагает сделать магниты частью структуры ротора. IPM это когда магниты и ротор являются одним целым, отмечает Стивенс. В то же время мощность и плотность потока магнитного поля взаимосвязаны.
Размещенные на поверхности магниты могут создавать быстро меняющееся магнитное поле, благодаря чему достигается высокая скорость вращения, а встроенные магниты создают большую плотность потока и, соответственно, больший крутящий момент, но с некоторой потерей скорости изменения поля, утверждает Стивенс.
Установление магнитного поля происходит за конечное время, что не мешает созданию высокоскоростных двигателей со встроенными постоянными магнитами. Обычно эта технология используется в больших двигателях, однако размеры и мощности двигателей IPM и SPM в значительной области совпадают.
Редкоземельные магниты, наверное, являются самой дорогой частью двигателя. Технология SPM обычно требует меньше магнитного материала, особенно для небольших двигателей, что является ее преимуществом. Благодаря простой конструкции и малому использованию материала, SPM гораздо более экономична, считает Стивенс, но всегда нужно искать компромисс между стоимостью и преимуществами технологии. Например, в IPM-двигателях установлены плоские магниты, которые просты в изготовлении, в отличие от магнитов криволинейных форм в SPM двигателях.
|
|
|
Двигатель серии Sigma II Series Large Capacity SGMBH компании Yaskawa Electric с полностью закрытыми встроенными магнитами, воздушным охлаждением корпуса (TEFC), защитным кожухом IP44 и входным напряжением 480 В |
Стивенс соглашается с преимуществами установки магнитов внутри ротора. Чем меньше диаметр ротора, тем меньше инерция. Момент инерции пропорционален квадрату радиуса, что следует из формулы момента инерции цилиндрического ротора mr2/2, где m масса ротора, а r его радиус. Это приводит к эффективному увеличению мощности одной из характеристик двигателя, особенно важной для больших двигателей, утверждает он. В мощных SPM-двигателях момент инерции ротора может оказаться слишком большим, что приведет к значительным затратам энергии только на разгон двигателя.
Ослабление поля, новая конструкция двигателя
По словам Стеффена Винклера (Steffen Winkler), главного менеджера по приводным системам компании Bosch Rexroth AG, одним из основных преимуществ синхронных двигателей со встроенными постоянными магнитами является возможность управляемого ослабления поля (до значения 6:1 или даже 10:1). Данный метод позволяет расширить область рабочих скоростей до значений, характерных для асинхронных двигателей.
Компания Bosch Rexroth, известная своими технологическими решениями в области электродвигателей, представила новейший синхронный двигатель со встроенными постоянными магнитами с прямым приводом. По имеющимся данным, модель IndraDyn H обеспечивает наивысшую, по сравнению с другими решениями, мощность, равную 57 кВт. Максимальная скорость более компактной модели равна 30000 оборотов в минуту. Винклер называет IndraDyn H первым двигателем с полностью замкнутым контуром охлаждения, упрощающим работу инженерам-механикам и увеличивающим эффективность охлаждения. По его словам, встроенное в статор водяное охлаждение наиболее эффективно и считается стандартом, но и другие охлаждающие среды (масло, газ), а также естественная конвекция могут быть использованы в задачах с пониженной или непродолжительной нагрузкой.
Компания Yaskawa Electric применяет технологию IPM в мощных серводвигателях, например, в модели Large Capacity SGMBH, заявленной как стандартный двигатель с выходной мощностью до 55 кВт. Крис Нудсен (Chris Knudsen), менеджер по маркетингу продукции в компании Yaskawa Electric America, отмечает, что эти двигатели могут обеспечить мощность до 90 кВт. Благодаря более компактному и легкому ротору двигателя SGMBH, центробежные силы уменьшаются и, как следствие, увеличиваются скорость и ускорение, необходимые в таких задачах, как высокотемпературное формообразование, литье под давлением, прессование, обработка металлов под давлением, продувка материалов в конвертере, автоматизированная сборка и т.д. Быстрое вращение ротора с большим диаметром приводит к возникновению значительных центробежных сил, действующих на расположенные на поверхности ротора магниты, утверждает Нудсен, эти силы, как и магнитные силы, вызванные током, можно уменьшить, если установить магниты внутри ротора.
Нудсен считает, что, учитывая затраты и требования задачи, технология встроенных постоянных магнитов подходит для крупногабаритных двигателей. Для меньших по размеру серводвигателей подходит экономичная и надежная технология SPM, обеспечивающая отличные характеристики двигателя в приложениях с высокими требованиями, например, в механических станках.
Стоимость, сложность, управление
Создание серводвигателя со встроенными постоянными магнитами сопряжено с рядом сложностей и дополнительных затрат. Вебстер из GE Fanuc уточняет: чтобы реализовать преимущества в производительности и размере, необходимо использовать метод конечных элементов (FEM) магнитного анализа, дорогие редкоземельные магниты и датчики положения с высоким разрешением.
Одна из основных конструкторских проблем заключается в придании правильной формы сердечнику IPM-ротора. Внутреннее расположение магнитов и меньший размер ротора ограничивают возможности по изменению формы поверхности сердечника. Чтобы получить оптимальное соотношение между величиной крутящего момента и силой, возникающей вследствие зубцовых гармонических помех, для определения формы сердечника ротора применяют метод конечных элементов анализа магнитной структуры. Технология IPM создает нечто среднее между сверхплавным и сверхмощным двигателем, продолжает Вебстер. Для создания формы нужной сложности необходимо современное литейное оборудование. Еще более сложен в изготовлении слоистый ротор, используемый для уменьшения тепловых потерь. А для реализации технологии SPM можно ограничиться сплошным стальным ротором с наклеенными на него обыкновенными магнитами, продолжает Вебстер.
По словам Вебстера, IPM-двигателю, как правило, нужна более быстрая и современная система управления. Для стабильной работы малоинерционного двигателя с небольшим и легким ротором требуется датчик положения высокого разрешения, установленный на двигатель, а также быстрая следящая система управления. Для увеличения количества данных обратной связи, необходимых для работы цикла скорости и позиционирования, могут понадобиться датчики с поддержкой до 16 миллионов отсчетов на оборот. Для стабильной работы необходимо принимать во внимание инерцию ротора, поскольку момент инерции IPM-ротора на основе редкоземельных магнитов может оказаться в несколько раз меньше момента SPM-ротора.
Время отклика следящей системы управления также должно быть малым для улучшения стабильности и плавности подачи при больших значениях инерционности. Вебстер рекомендует быстродействующее векторное управление (HRV) особый тип низкоуровневого управления, поддерживающий период цикла управления током 32,25 микросекунд (период цикла скорости 62,5 мкс) и обеспечивающий улучшенную реакцию, управляемость, точность и плавность работы. Кроме того, в системах векторного управления используются резонансные фильтры, которые ослабляют механический резонанс в двигателе. Совместное использование этих особенностей систем управления обеспечит высокую эффективность работы, утверждает Вебстер.
Винклер из Bosch Rexroth согласен с тем, что двигателям со встроенными постоянными магнитами требуется более сложное управление, чем традиционным двигателям с постоянными магнитами. Чтобы обеспечить оптимальную производительность системы, необходимо провести ее настройку с учетом специфических характеристик двигателя, особенно это касается управления ослаблением поля, считает он. Это значит, что желательно, хотя и не обязательно, использовать двигатель и контроллер одного производителя
По словам Стивенса из Danaher Motion, из-за отличительных особенностей технологии встроенных постоянных магнитов сигнал управления IPM-двигателем намного сложнее синусоидального. Более того, некоторым двигателям со встроенными магнитами высокой мощности требуются дополнительные функции управления, необходимые для увеличения рабочей скорости без уменьшения крутящего момента или с небольшим его уменьшением. Данный метод, известный под названием угловое опережение, основан на переключении управляющего сигнала с опережением изменения положения ротора и чем-то напоминает опережение в распределителе зажигания автомобиля. С помощью этого метода преодолевается временная задержка установления поля, возникающая из-за индуктивности, магнитного сопротивления и формы сердечника и зубцов. Необходимо полностью использовать магнитное поле, чтобы получить максимальный крутящий момент при данной скорости, считает Стивенс, при современном уровне развития цифровых сигнальных процессоров эта задача легко решается с помощью таблиц преобразования или расчетов на уровне привода
Динамические характеристики двигателей со встроенными постоянными магнитами достигаются при помощи сложных алгоритмов углового опережения, ненужных SPM-двигателям. Это одна из причин, почему системы управления IPM-серводвигателей обычно сложнее. Тем не менее, Стивенс отмечает, что более сложная система управления не означает менее стабильную работу. Требования к надежности в промышленности постоянно растут, и им соответствуют приводы, которые во многом превосходят устаревшие аналоги, заканчивает Стивенс.
В общем и целом, двигатели со встроенными постоянными магнитами могут предоставить лучшие характеристики, чем их аналоги на базе роторов с поверхностными магнитами и электродвигатели, основанные на других технологиях.
( control engineering usa )
Энергоэффективный синхронный двигатель с постоянными магнитами Dyneo
Dyneo это новая серия синхронных двигателей с постоянными магнитами, обладающих высоким КПД, повышенными скоростями вращения и относительно широким диапазоном мощностей.
Серия представлена моделями: LSRPM – c алюминиевым корпусом с IP55 для общепромышленных применений; PLSRPM – со стальным корпусом с IP23 для применений, где требуется высокая удельная мощность.
За счет использования постоянных магнитов в роторе, в нем отсутствуют потери, что влечет к увеличению КПД на 2-4 пункта по сравнению со стандартным асинхронным двигателем аналогичной мощности. При этом, в отличие от асинхронного двигателя, КПД остается постоянным на всем диапазоне регулирования скорости.
Поскольку данная серия предназначена для использования в составе частотно-регулируемого электропривода, инженерами LeroySomer проведена большая работа по адаптации двигателей Dyneo к использованию с преобразователями частоты Emerson серий Unidrive M, Powerdrive MD2 и Powerdrive FX. Благодаря этому достигается превосходная точность регулирования скорости и момента приводного двигателя, в сочетании с высочайшей надежностью.
Основные параметры двигателей Dyneo:
| LSRPM | PLSRPM | |
|---|---|---|
| Номинальная мощность | 6,9…350 кВт | 325…390 кВт |
| Номинальное напряжение | 400В/50Гц | |
| Номинальная скорость вращения | 750, 900, 1500, 1800, 2400, 3000, 3600, 4500 и 5500 об/мин | 3600 об/мин |
| Номинальный момент | 12…1393 Нм | 862…1035 Нм |
| Типоразмер(высота оси вращения, мм) | 90…315 | 315 |
| Класс изоляции | F(155°С) | |
| Степень защиты | IP55 | IP23 |
| Метод охлаждения | IC 411, IC410 и IC416A | IC 411 и IC416A |
| Монтажное исполнение | IM1001, IM1031, IM1051, IM1061, IM1071, IM1011, IM3001, IM3011, IM3031, IM2001, IM2011, IM2031, IM3601, IM3611, IM3631, IM2101, IM2111, IM2131, IM1201, IM9101 | |
| Датчик скорости | Абсолютный/инкрементальный энкодер | |
| Дополнительные элементы | Комплектная поставка с редуктором, ATEX комплектация, электромагнитный тормоз, антиконденсатные ТЭНы, датчики температуры в обмотках стотора и подшипниковых щитах, усиленная изоляция обмоток статора, модификация размеров фланца и диаметра выходного вала, усиленные подшипники, улучшенная балансировка, адаптация клеммной коробки, защитyые покрытия корпуса двигателя, и др. | |
| Температуры окружающей среды и высота над уровнем моря | от -16°С до +40°С и до 1000 м | |
| Цвет | RAL3005(вишневый) | RAL3005(вишневый) |
Основные технические данные двигателей Dyneo:
| Тип | Р, кВт | Мн, Нм | I, А | ƞ, % | Мп/Мн | Масса, кг |
|---|---|---|---|---|---|---|
| 5500 об/мин | ||||||
| LSRPM 90SL | 6,9 | 12 | 12,7 | 93,5 | 1,37 | 14 |
| LSRPM 90L | 8,6 | 14,9 | 15,2 | 94 | 1,37 | 17 |
| LSRPM 100L | 10,4 | 18 | 19 | 94 | 1,37 | 19 |
| LSRPM 100L | 12,1 | 21 | 22 | 94,5 | 1,37 | 24 |
| LSRPM 100L | 13,8 | 24 | 25 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 18,6 | 32 | 35 | 94 | 1,37 | 40 |
| LSRPM 132M | 23 | 40 | 44 | 94 | 1,37 | 44 |
| LSRPM 132M | 27 | 47 | 52 | 94,5 | 1,37 | 49 |
| LSRPM 160MP | 35 | 62 | 67 | 94,5 | 1,37 | 60 |
| LSRPM 160MP | 44 | 76 | 82 | 95 | 1,37 | 69 |
| LSRPM 160LR | 52 | 90 | 97 | 95 | 1,37 | 79 |
| LSRPM 200L1 | 70 | 122 | 140 | 95,2 | 1,37 | 138 |
| LSRPM 200L1 | 85 | 148 | 180 | 95,4 | 1,37 | 148 |
| LSRPM 200L1 | 100 | 174 | 210 | 95,8 | 1,37 | 153 |
| LSRPM 200L2 | 140 | 243 | 265 | 96,6 | 1,37 | 180 |
| 4500 об/мин | ||||||
| LSRPM 90SL | 6,8 | 15 | 12,6 | 93,5 | 1,37 | 14 |
| LSRPM 90L | 8,5 | 18 | 15,2 | 94 | 1,37 | 17 |
| LSRPM 100L | 10,2 | 22 | 18,8 | 94 | 1,37 | 19 |
| LSRPM 100L | 12 | 25 | 22 | 94,5 | 1,37 | 24 |
| LSRPM 100L | 13,7 | 29 | 25 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 18,6 | 39 | 35 | 94,5 | 1,37 | 40 |
| LSRPM 132M | 23 | 49 | 44 | 94,5 | 1,37 | 44 |
| LSRPM 132M | 27 | 58 | 51 | 95 | 1,37 | 49 |
| LSRPM 160MP | 35 | 75 | 67 | 95 | 1,37 | 60 |
| LSRPM 160MP | 44 | 93 | 81 | 95,5 | 1,37 | 69 |
| LSRPM 160LR | 52 | 110 | 97 | 95,5 | 1,37 | 79 |
| LSRPM 200L1 | 65 | 138 | 130 | 95,3 | 1,37 | 138 |
| LSRPM 200L1 | 80 | 170 | 160 | 95,7 | 1,37 | 148 |
| LSRPM 200L1 | 100 | 212 | 200 | 96,2 | 1,37 | 168 |
| LSRPM 200L2 | 120 | 255 | 230 | 96,4 | 1,37 | 185 |
| LSRPM 200LU2 | 135 | 287 | 270 | 96,5 | 1,37 | 195 |
| LSRPM 225SR2 | 150 | 318 | 277 | 96,6 | 1,37 | 225 |
| LSRPM 250SE | 170 | 361 | 310 | 96,5 | 1,37 | 310 | 3600 об/мин |
| LSRPM 90SL | 6,4 | 17 | 11,9 | 93 | 1,38 | 14 |
| LSRPM 90L | 8 | 21 | 14,8 | 93,5 | 1,35 | 17 |
| LSRPM 100L | 9,6 | 26 | 17,6 | 94 | 1,37 | 19 |
| LSRPM 100L | 11,2 | 30 | 21 | 94 | 1,37 | 24 |
| LSRPM 100L | 12,8 | 34 | 23 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 17,6 | 47 | 33 | 94,5 | 1,37 | 40 |
| LSRPM 132M | 22 | 58 | 39 | 94,5 | 1,37 | 44 |
| LSRPM 132M | 26 | 69 | 48 | 95 | 1,37 | 49 |
| LSRPM 160MP | 34 | 89 | 63 | 95 | 1,37 | 60 |
| LSRPM 160MP | 41 | 110 | 77 | 95,5 | 1,37 | 69 |
| LSRPM 160LR | 49 | 130 | 91 | 95,5 | 1,28 | 79 |
| LSRPM 200L | 50 | 133 | 110 | 95,5 | 1,37 | 135 |
| LSRPM 200L1 | 70 | 186 | 140 | 96 | 1,37 | 153 |
| LSRPM 200L1 | 85 | 225 | 157 | 96,4 | 1,37 | 178 |
| LSRPM 200LU2 | 115 | 305 | 220 | 96,8 | 1,37 | 195 |
| LSRPM 225SG | 132 | 350 | 250 | 96,8 | 1,37 | 250 |
| LSRPM 250SE1 | 165 | 438 | 330 | 96,9 | 1,37 | 268 |
| LSRPM 250SE1 | 190 | 504 | 350 | 97,1 | 1,37 | 288 |
| LSRPM 280SD1 | 240 | 637 | 430 | 97,1 | 1,37 | 383 |
| LSRPM 280MK1 | 270 | 716 | 480 | 97,2 | 1,37 | 620 |
| PLSRPM 315LD | 325 | 862 | 575 | 97,3 | 1,37 | 735 |
| PLSRPM 315LD | 350 | 928 | 660 | 97,4 | 1,37 | 760 |
| PLSRPM 315LD | 390 | 1035 | 715 | 97,5 | 1,37 | 800 |
| 3000 об/мин | ||||||
| LSRPM 90SL | 5,8 | 19 | 11 | 91,5 | 1,37 | 14 |
| LSRPM 90L | 7,3 | 23 | 13,5 | 93 | 1,37 | 17 |
| LSRPM 100L | 8,7 | 28 | 16,2 | 93 | 1,37 | 19 |
| LSRPM 100L | 10,2 | 32 | 18,8 | 93,5 | 1,37 | 24 |
| LSRPM 100L | 11,6 | 37 | 21 | 93,5 | 1,37 | 26 |
| LSRPM 132M | 15,8 | 50 | 30 | 93 | 1,37 | 40 |
| LSRPM 132M | 19,7 | 63 | 38 | 93,5 | 1,37 | 44 |
| LSRPM 132M | 23 | 74 | 44 | 94 | 1,37 | 49 |
| LSRPM 160MP | 30 | 96 | 57 | 94,5 | 1,37 | 60 |
| LSRPM 160MP | 37 | 118 | 68 | 95 | 1,37 | 69 |
| LSRPM 160LR | 44 | 140 | 82 | 95 | 1,37 | 79 |
| LSRPM 200L | 50 | 159 | 112 | 95,5 | 1,37 | 135 |
| LSRPM 200L1 | 65 | 207 | 126 | 96 | 1,37 | 153 |
| LSRPM 200L1 | 85 | 271 | 164 | 96,5 | 1,37 | 178 |
| LSRPM 225ST2 | 110 | 350 | 215 | 96,6 | 1,37 | 195 |
| LSRPM 250SE | 145 | 462 | 285 | 97,1 | 1,37 | 265 |
| LSRPM 250ME1 | 170 | 541 | 338 | 97,2 | 1,37 | 288 |
| LSRPM 280SC1 | 200 | 637 | 365 | 97,3 | 1,37 | 333 |
| LSRPM 280SD1 | 220 | 700 | 400 | 97,4 | 1,37 | 383 |
| LSRPM 280MK1 | 260 | 828 | 470 | 97,4 | 1,37 | 620 |
| LSRPM 280MK1 | 290 | 923 | 530 | 97,4 | 1,37 | 620 |
| LSRPM 315SP1 | 320 | 1019 | 590 | 97,5 | 1,37 | 670 |
| PLSRPM315LD | 340 | 1082 | 630 | 97,5 | 1,37 | 800 |
| 2400 об/мин | ||||||
| LSRPM 90SL | 4,8 | 19 | 9,1 | 90,5 | 1,37 | 14 |
| LSRPM 90L | 6 | 24 | 10,9 | 91,5 | 1,2 | 17 |
| LSRPM 100L | 7,2 | 29 | 13,4 | 92 | 1,37 | 19 |
| LSRPM 100L | 8,4 | 33 | 15,2 | 92,5 | 1,37 | 24 |
| LSRPM 100L | 9,5 | 38 | 17,7 | 93 | 1,37 | 26 |
| LSRPM 132M | 13,1 | 52 | 25 | 92,5 | 1,37 | 40 |
| LSRPM 132M | 16,3 | 65 | 31 | 93 | 1,37 | 44 |
| LSRPM 132M | 19,2 | 76 | 37 | 93,5 | 1,37 | 49 |
| LSRPM 160MP | 25 | 99 | 47 | 94 | 1,37 | 60 |
| LSRPM 160MP | 31 | 122 | 58 | 94,5 | 1,37 | 69 |
| LSRPM 160LR | 36 | 145 | 69 | 94,5 | 1,37 | 79 |
| LSRPM 200L | 37,5 | 149 | 81 | 95 | 1,37 | 135 |
| LSRPM 200L | 50 | 199 | 110 | 95,4 | 1,37 | 150 |
| LSRPM 200L1 | 65 | 259 | 137 | 95,9 | 1,37 | 168 |
| LSRPM 200L1 | 80 | 318 | 160 | 96,6 | 1,37 | 183 |
| LSRPM 225MR1 | 100 | 398 | 200 | 96,9 | 1,37 | 218 |
| LSRPM 250SE | 125 | 497 | 235 | 97,2 | 1,37 | 285 |
| LSRPM 250ME | 150 | 597 | 285 | 97,3 | 1,37 | 310 |
| LSRPM 280SD1 | 190 | 756 | 350 | 97,5 | 1,37 | 383 |
| LSRPM 280MK1 | 230 | 915 | 429 | 97,4 | 1,37 | 591 |
| LSRPM 315SP1 | 285 | 1134 | 509 | 97,6 | 1,37 | 675 |
| LSRPM 315SR1 | 310 | 1233 | 565 | 97,7 | 1,37 | 715 |
| LSRPM 315MR1 | 350 | 1393 | 645 | 97,5 | 1,21 | 720 |
| 1800 об/мин | ||||||
| LSRPM 90SL | 3,6 | 19 | 6,9 | 89 | 1,37 | 14 |
| LSRPM 90L | 4,5 | 24 | 8,5 | 90,5 | 1,37 | 17 |
| LSRPM 100L | 5,4 | 29 | 10,2 | 91 | 1,37 | 19 |
| LSRPM 100L | 6,3 | 33 | 11,8 | 91,5 | 1,37 | 24 |
| LSRPM 100L | 7,2 | 38 | 13,4 | 92 | 1,37 | 26 |
| LSRPM 132M | 9,8 | 52 | 19 | 92 | 1,37 | 40 |
| LSRPM 132M | 12,3 | 65 | 24 | 92,5 | 1,37 | 44 |
| LSRPM 132M | 14,4 | 76 | 28 | 93 | 1,37 | 49 |
| LSRPM 160MP | 18,7 | 99 | 36 | 93,5 | 1,37 | 60 |
| LSRPM 160MP | 23 | 122 | 43 | 94 | 1,37 | 69 |
| LSRPM 160LR | 27,3 | 145 | 52 | 94 | 1,37 | 79 |
| LSRPM 200L | 33 | 175 | 79 | 94 | 1,37 | 135 |
| LSRPM 200L | 40 | 212 | 82,5 | 94,8 | 1,37 | 150 |
| LSRPM 200L | 55 | 292 | 115 | 95,7 | 1,37 | 165 |
| LSRPM 225ST1 | 70 | 371 | 143 | 96,1 | 1,37 | 193 |
| LSRPM 225MR1 | 85 | 451 | 172 | 96 | 1,37 | 223 |
| LSRPM 250ME | 100 | 531 | 204 | 96,1 | 1,37 | 285 |
| LSRPM 280SC | 125 | 663 | 248 | 96,3 | 1,37 | 330 |
| LSRPM 280SD | 150 | 796 | 295 | 96,4 | 1,37 | 380 |
| LSRPM 280MK1 | 175 | 928 | 330 | 96,5 | 1,37 | 568 |
| LSRPM 315SP1 | 195 | 1035 | 370 | 96,7 | 1,37 | 635 |
| LSRPM 315MR1 | 230 | 1220 | 425 | 96,9 | 1,37 | 720 |
| 1500 об/мин | ||||||
| LSRPM 90SL | 3 | 19 | 5,9 | 87 | 1,37 | 14 |
| LSRPM 90L | 3,7 | 24 | 7,2 | 89 | 1,37 | 17 |
| LSRPM 100L | 4,5 | 29 | 8,6 | 90 | 1,37 | 19 |
| LSRPM 100L | 5,2 | 33 | 9,9 | 91 | 1,37 | 24 |
| LSRPM 100L | 6 | 38 | 10,9 | 91,5 | 1,37 | 26 |
| LSRPM 132M | 8,2 | 52 | 16 | 91 | 1,37 | 40 |
| LSRPM 132M | 10,2 | 65 | 19,9 | 91,5 | 1,37 | 44 |
| LSRPM 132M | 12 | 76 | 23 | 92 | 1,37 | 49 |
| LSRPM 160MP | 15,6 | 99 | 30 | 92,5 | 1,37 | 60 |
| LSRPM 160MP | 19,2 | 122 | 37 | 93 | 1,37 | 69 |
| LSRPM 160LR | 22,8 | 145 | 43 | 93,5 | 1,37 | 79 |
| LSRPM 200L | 25 | 159 | 56 | 94 | 1,37 | 135 |
| LSRPM 200L | 33 | 210 | 75 | 94,6 | 1,37 | 150 |
| LSRPM 200L | 40 | 255 | 83 | 95,2 | 1,37 | 165 |
| LSRPM 200LU | 55 | 350 | 110 | 95,5 | 1,37 | 190 |
| LSRPM 225MR1 | 70 | 446 | 142 | 95,7 | 1,37 | 223 |
| LSRPM 250ME | 85 | 541 | 175 | 95,6 | 1,37 | 285 |
| LSRPM 280SC | 105 | 668 | 215 | 96,3 | 1,37 | 330 |
| LSRPM 280SD | 125 | 796 | 245 | 96,4 | 1,37 | 380 |
| LSRPM 280MK1 | 145 | 923 | 285 | 96,3 | 1,37 | 568 |
| LSRPM 315SP1 | 175 | 1114 | 350 | 96,5 | 1,37 | 635 |
| LSRPM 315MR1 | 220 | 1401 | 430 | 96,7 | 1,37 | 720 |
| 900 об/мин | ||||||
| LSRPM 90SL | 1,8 | 19 | 3,8 | 82 | 1,37 | 14 |
| LSRPM 90L | 2,2 | 24 | 4,6 | 84 | 1,41 | 17 |
| LSRPM 100L | 2,7 | 29 | 5,4 | 85 | 1,36 | 19 |
| LSRPM 100L | 3,1 | 33 | 6,2 | 87 | 1,37 | 24 |
| LSRPM 100L | 3,6 | 38 | 6,9 | 88 | 1,37 | 26 |
| LSRPM 132M | 4,9 | 52 | 9,9 | 88 | 1,37 | 40 |
| LSRPM 132M | 6,1 | 65 | 12,3 | 89 | 1,37 | 44 |
| LSRPM 132M | 7,2 | 76 | 14,3 | 90 | 1,37 | 49 |
| LSRPM 160MP | 9,4 | 99 | 18,4 | 90,5 | 1,47 | 60 |
| LSRPM 160MP | 11,5 | 122 | 23 | 91 | 1,37 | 69 |
| LSRPM 160LR | 13,7 | 145 | 27 | 91 | 1,37 | 79 |
| LSRPM 200L | 15 | 159 | 38 | 90,6 | 1,37 | 135 |
| LSRPM 200L | 20 | 212 | 43 | 91,6 | 1,37 | 150 |
| LSRPM 200L | 25 | 265 | 52 | 92,3 | 1,37 | 165 |
| LSRPM 200LU | 33 | 350 | 70 | 92,9 | 1,37 | 190 |
| LSRPM 250SE | 40 | 424 | 79 | 95,5 | 1,37 | 250 |
| LSRPM 250ME | 50 | 531 | 98 | 95,8 | 1,37 | 285 |
| LSRPM 280SD | 60 | 637 | 120 | 96,2 | 1,37 | 350 |
| LSRPM 280SD | 75 | 796 | 140 | 96 | 1,37 | 380 |
| LSRPM 280MK1 | 85 | 902 | 170 | 95,9 | 1,37 | 545 |
| LSRPM 315SP1 | 100 | 1061 | 190 | 96,2 | 1,37 | 625 |
| LSRPM 315MR1 | 130 | 1379 | 275 | 96,6 | 1,37 | 715 |
| 750 об/мин | ||||||
| LSRPM 90SL | 1,4 | 18 | 3 | 80 | 1,2 | 14 |
| LSRPM 90L | 1,8 | 23 | 3,7 | 83 | 1,2 | 17 |
| LSRPM 100L | 2,1 | 27 | 4,4 | 84 | 1,2 | 19 |
| LSRPM 100L | 2,5 | 32 | 5 | 85 | 1,2 | 24 |
| LSRPM 100L | 2,8 | 36 | 5,7 | 86 | 1,2 | 26 |
| LSRPM 132M | 4,1 | 52 | 8,5 | 86 | 1,2 | 40 |
| LSRPM 132M | 5,1 | 65 | 10,5 | 87 | 1,2 | 44 |
| LSRPM 132M | 6 | 76 | 12,2 | 88 | 1,2 | 49 |
| LSRPM 160MP | 7,8 | 99 | 15,6 | 89 | 1,2 | 60 |
| LSRPM 160MP | 9,6 | 122 | 19 | 90 | 1,2 | 69 |
| LSRPM 160LR | 10,8 | 138 | 21 | 90,5 | 1,2 | 79 |
| LSRPM 200L | 12,5 | 159 | 32 | 89,5 | 1,2 | 135 |
| LSRPM 200L | 16 | 204 | 35 | 90,8 | 1,2 | 150 |
| LSRPM 200L | 21 | 267 | 44 | 91,4 | 1,2 | 165 |
| LSRPM 200LU | 26 | 337 | 57 | 92,2 | 1,2 | 190 |
| LSRPM 250SE | 33 | 420 | 65 | 94,8 | 1,2 | 250 |
| LSRPM 250SE | 40 | 509 | 80 | 95,3 | 1,2 | 285 |
| LSRPM 280SD | 55 | 700 | 107 | 95,5 | 1,2 | 350 |
| LSRPM 280MD | 70 | 891 | 142 | 95,6 | 1,2 | 380 |
| LSRPM 315SP1 | 85 | 1082 | 171 | 95,9 | 1,2 | 625 |
| LSRPM 315MR1 | 110 | 1401 | 215 | 96,3 | 1,2 | 715 |
Dyneo это новая серия синхронных двигателей с постоянными магнитами, обладающих высоким КПД, повышенными скоростями вращения и относительно широким диапазоном мощностей.
Серия представлена моделями: LSRPM – c алюминиевым корпусом с IP55 для общепромышленных применений; PLSRPM – со стальным корпусом с IP23 для применений, где требуется высокая удельная мощность.
За счет использования постоянных магнитов в роторе, в нем отсутствуют потери, что влечет к увеличению КПД на 2-4 пункта по сравнению со стандартным асинхронным двигателем аналогичной мощности. При этом, в отличие от асинхронного двигателя, КПД остается постоянным на всем диапазоне регулирования скорости.
Поскольку данная серия предназначена для использования в составе частотно-регулируемого электропривода, инженерами LeroySomer проведена большая работа по адаптации двигателей Dyneo к использованию с преобразователями частоты Emerson серий Unidrive M, Powerdrive MD2 и Powerdrive FX. Благодаря этому достигается превосходная точность регулирования скорости и момента приводного двигателя, в сочетании с высочайшей надежностью.
Основные параметры двигателей Dyneo:
| LSRPM | PLSRPM | |
|---|---|---|
| Номинальная мощность | 6,9…350 кВт | 325…390 кВт |
| Номинальное напряжение | 400В/50Гц | |
| Номинальная скорость вращения | 750, 900, 1500, 1800, 2400, 3000, 3600, 4500 и 5500 об/мин | 3600 об/мин |
| Номинальный момент | 12…1393 Нм | 862…1035 Нм |
| Типоразмер(высота оси вращения, мм) | 90…315 | 315 |
| Класс изоляции | F(155°С) | |
| Степень защиты | IP55 | IP23 |
| Метод охлаждения | IC 411, IC410 и IC416A | IC 411 и IC416A |
| Монтажное исполнение | IM1001, IM1031, IM1051, IM1061, IM1071, IM1011, IM3001, IM3011, IM3031, IM2001, IM2011, IM2031, IM3601, IM3611, IM3631, IM2101, IM2111, IM2131, IM1201, IM9101 | |
| Датчик скорости | Абсолютный/инкрементальный энкодер | |
| Дополнительные элементы | Комплектная поставка с редуктором, ATEX комплектация, электромагнитный тормоз, антиконденсатные ТЭНы, датчики температуры в обмотках стотора и подшипниковых щитах, усиленная изоляция обмоток статора, модификация размеров фланца и диаметра выходного вала, усиленные подшипники, улучшенная балансировка, адаптация клеммной коробки, защитyые покрытия корпуса двигателя, и др. | |
| Температуры окружающей среды и высота над уровнем моря | от -16°С до +40°С и до 1000 м | |
| Цвет | RAL3005(вишневый) | RAL3005(вишневый) |
Основные технические данные двигателей Dyneo:
| Тип | Р, кВт | Мн, Нм | I, А | ƞ, % | Мп/Мн | Масса, кг |
|---|---|---|---|---|---|---|
| 5500 об/мин | ||||||
| LSRPM 90SL | 6,9 | 12 | 12,7 | 93,5 | 1,37 | 14 |
| LSRPM 90L | 8,6 | 14,9 | 15,2 | 94 | 1,37 | 17 |
| LSRPM 100L | 10,4 | 18 | 19 | 94 | 1,37 | 19 |
| LSRPM 100L | 12,1 | 21 | 22 | 94,5 | 1,37 | 24 |
| LSRPM 100L | 13,8 | 24 | 25 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 18,6 | 32 | 35 | 94 | 1,37 | 40 |
| LSRPM 132M | 23 | 40 | 44 | 94 | 1,37 | 44 |
| LSRPM 132M | 27 | 47 | 52 | 94,5 | 1,37 | 49 |
| LSRPM 160MP | 35 | 62 | 67 | 94,5 | 1,37 | 60 |
| LSRPM 160MP | 44 | 76 | 82 | 95 | 1,37 | 69 |
| LSRPM 160LR | 52 | 90 | 97 | 95 | 1,37 | 79 |
| LSRPM 200L1 | 70 | 122 | 140 | 95,2 | 1,37 | 138 |
| LSRPM 200L1 | 85 | 148 | 180 | 95,4 | 1,37 | 148 |
| LSRPM 200L1 | 100 | 174 | 210 | 95,8 | 1,37 | 153 |
| LSRPM 200L2 | 140 | 243 | 265 | 96,6 | 1,37 | 180 |
| 4500 об/мин | ||||||
| LSRPM 90SL | 6,8 | 15 | 12,6 | 93,5 | 1,37 | 14 |
| LSRPM 90L | 8,5 | 18 | 15,2 | 94 | 1,37 | 17 |
| LSRPM 100L | 10,2 | 22 | 18,8 | 94 | 1,37 | 19 |
| LSRPM 100L | 12 | 25 | 22 | 94,5 | 1,37 | 24 |
| LSRPM 100L | 13,7 | 29 | 25 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 18,6 | 39 | 35 | 94,5 | 1,37 | 40 |
| LSRPM 132M | 23 | 49 | 44 | 94,5 | 1,37 | 44 |
| LSRPM 132M | 27 | 58 | 51 | 95 | 1,37 | 49 |
| LSRPM 160MP | 35 | 75 | 67 | 95 | 1,37 | 60 |
| LSRPM 160MP | 44 | 93 | 81 | 95,5 | 1,37 | 69 |
| LSRPM 160LR | 52 | 110 | 97 | 95,5 | 1,37 | 79 |
| LSRPM 200L1 | 65 | 138 | 130 | 95,3 | 1,37 | 138 |
| LSRPM 200L1 | 80 | 170 | 160 | 95,7 | 1,37 | 148 |
| LSRPM 200L1 | 100 | 212 | 200 | 96,2 | 1,37 | 168 |
| LSRPM 200L2 | 120 | 255 | 230 | 96,4 | 1,37 | 185 |
| LSRPM 200LU2 | 135 | 287 | 270 | 96,5 | 1,37 | 195 |
| LSRPM 225SR2 | 150 | 318 | 277 | 96,6 | 1,37 | 225 |
| LSRPM 250SE | 170 | 361 | 310 | 96,5 | 1,37 | 310 | 3600 об/мин |
| LSRPM 90SL | 6,4 | 17 | 11,9 | 93 | 1,38 | 14 |
| LSRPM 90L | 8 | 21 | 14,8 | 93,5 | 1,35 | 17 |
| LSRPM 100L | 9,6 | 26 | 17,6 | 94 | 1,37 | 19 |
| LSRPM 100L | 11,2 | 30 | 21 | 94 | 1,37 | 24 |
| LSRPM 100L | 12,8 | 34 | 23 | 94,5 | 1,37 | 26 |
| LSRPM 132M | 17,6 | 47 | 33 | 94,5 | 1,37 | 40 |
| LSRPM 132M | 22 | 58 | 39 | 94,5 | 1,37 | 44 |
| LSRPM 132M | 26 | 69 | 48 | 95 | 1,37 | 49 |
| LSRPM 160MP | 34 | 89 | 63 | 95 | 1,37 | 60 |
| LSRPM 160MP | 41 | 110 | 77 | 95,5 | 1,37 | 69 |
| LSRPM 160LR | 49 | 130 | 91 | 95,5 | 1,28 | 79 |
| LSRPM 200L | 50 | 133 | 110 | 95,5 | 1,37 | 135 |
| LSRPM 200L1 | 70 | 186 | 140 | 96 | 1,37 | 153 |
| LSRPM 200L1 | 85 | 225 | 157 | 96,4 | 1,37 | 178 |
| LSRPM 200LU2 | 115 | 305 | 220 | 96,8 | 1,37 | 195 |
| LSRPM 225SG | 132 | 350 | 250 | 96,8 | 1,37 | 250 |
| LSRPM 250SE1 | 165 | 438 | 330 | 96,9 | 1,37 | 268 |
| LSRPM 250SE1 | 190 | 504 | 350 | 97,1 | 1,37 | 288 |
| LSRPM 280SD1 | 240 | 637 | 430 | 97,1 | 1,37 | 383 |
| LSRPM 280MK1 | 270 | 716 | 480 | 97,2 | 1,37 | 620 |
| PLSRPM 315LD | 325 | 862 | 575 | 97,3 | 1,37 | 735 |
| PLSRPM 315LD | 350 | 928 | 660 | 97,4 | 1,37 | 760 |
| PLSRPM 315LD | 390 | 1035 | 715 | 97,5 | 1,37 | 800 |
| 3000 об/мин | ||||||
| LSRPM 90SL | 5,8 | 19 | 11 | 91,5 | 1,37 | 14 |
| LSRPM 90L | 7,3 | 23 | 13,5 | 93 | 1,37 | 17 |
| LSRPM 100L | 8,7 | 28 | 16,2 | 93 | 1,37 | 19 |
| LSRPM 100L | 10,2 | 32 | 18,8 | 93,5 | 1,37 | 24 |
| LSRPM 100L | 11,6 | 37 | 21 | 93,5 | 1,37 | 26 |
| LSRPM 132M | 15,8 | 50 | 30 | 93 | 1,37 | 40 |
| LSRPM 132M | 19,7 | 63 | 38 | 93,5 | 1,37 | 44 |
| LSRPM 132M | 23 | 74 | 44 | 94 | 1,37 | 49 |
| LSRPM 160MP | 30 | 96 | 57 | 94,5 | 1,37 | 60 |
| LSRPM 160MP | 37 | 118 | 68 | 95 | 1,37 | 69 |
| LSRPM 160LR | 44 | 140 | 82 | 95 | 1,37 | 79 |
| LSRPM 200L | 50 | 159 | 112 | 95,5 | 1,37 | 135 |
| LSRPM 200L1 | 65 | 207 | 126 | 96 | 1,37 | 153 |
| LSRPM 200L1 | 85 | 271 | 164 | 96,5 | 1,37 | 178 |
| LSRPM 225ST2 | 110 | 350 | 215 | 96,6 | 1,37 | 195 |
| LSRPM 250SE | 145 | 462 | 285 | 97,1 | 1,37 | 265 |
| LSRPM 250ME1 | 170 | 541 | 338 | 97,2 | 1,37 | 288 |
| LSRPM 280SC1 | 200 | 637 | 365 | 97,3 | 1,37 | 333 |
| LSRPM 280SD1 | 220 | 700 | 400 | 97,4 | 1,37 | 383 |
| LSRPM 280MK1 | 260 | 828 | 470 | 97,4 | 1,37 | 620 |
| LSRPM 280MK1 | 290 | 923 | 530 | 97,4 | 1,37 | 620 |
| LSRPM 315SP1 | 320 | 1019 | 590 | 97,5 | 1,37 | 670 |
| PLSRPM315LD | 340 | 1082 | 630 | 97,5 | 1,37 | 800 |
| 2400 об/мин | ||||||
| LSRPM 90SL | 4,8 | 19 | 9,1 | 90,5 | 1,37 | 14 |
| LSRPM 90L | 6 | 24 | 10,9 | 91,5 | 1,2 | 17 |
| LSRPM 100L | 7,2 | 29 | 13,4 | 92 | 1,37 | 19 |
| LSRPM 100L | 8,4 | 33 | 15,2 | 92,5 | 1,37 | 24 |
| LSRPM 100L | 9,5 | 38 | 17,7 | 93 | 1,37 | 26 |
| LSRPM 132M | 13,1 | 52 | 25 | 92,5 | 1,37 | 40 |
| LSRPM 132M | 16,3 | 65 | 31 | 93 | 1,37 | 44 |
| LSRPM 132M | 19,2 | 76 | 37 | 93,5 | 1,37 | 49 |
| LSRPM 160MP | 25 | 99 | 47 | 94 | 1,37 | 60 |
| LSRPM 160MP | 31 | 122 | 58 | 94,5 | 1,37 | 69 |
| LSRPM 160LR | 36 | 145 | 69 | 94,5 | 1,37 | 79 |
| LSRPM 200L | 37,5 | 149 | 81 | 95 | 1,37 | 135 |
| LSRPM 200L | 50 | 199 | 110 | 95,4 | 1,37 | 150 |
| LSRPM 200L1 | 65 | 259 | 137 | 95,9 | 1,37 | 168 |
| LSRPM 200L1 | 80 | 318 | 160 | 96,6 | 1,37 | 183 |
| LSRPM 225MR1 | 100 | 398 | 200 | 96,9 | 1,37 | 218 |
| LSRPM 250SE | 125 | 497 | 235 | 97,2 | 1,37 | 285 |
| LSRPM 250ME | 150 | 597 | 285 | 97,3 | 1,37 | 310 |
| LSRPM 280SD1 | 190 | 756 | 350 | 97,5 | 1,37 | 383 |
| LSRPM 280MK1 | 230 | 915 | 429 | 97,4 | 1,37 | 591 |
| LSRPM 315SP1 | 285 | 1134 | 509 | 97,6 | 1,37 | 675 |
| LSRPM 315SR1 | 310 | 1233 | 565 | 97,7 | 1,37 | 715 |
| LSRPM 315MR1 | 350 | 1393 | 645 | 97,5 | 1,21 | 720 |
| 1800 об/мин | ||||||
| LSRPM 90SL | 3,6 | 19 | 6,9 | 89 | 1,37 | 14 |
| LSRPM 90L | 4,5 | 24 | 8,5 | 90,5 | 1,37 | 17 |
| LSRPM 100L | 5,4 | 29 | 10,2 | 91 | 1,37 | 19 |
| LSRPM 100L | 6,3 | 33 | 11,8 | 91,5 | 1,37 | 24 |
| LSRPM 100L | 7,2 | 38 | 13,4 | 92 | 1,37 | 26 |
| LSRPM 132M | 9,8 | 52 | 19 | 92 | 1,37 | 40 |
| LSRPM 132M | 12,3 | 65 | 24 | 92,5 | 1,37 | 44 |
| LSRPM 132M | 14,4 | 76 | 28 | 93 | 1,37 | 49 |
| LSRPM 160MP | 18,7 | 99 | 36 | 93,5 | 1,37 | 60 |
| LSRPM 160MP | 23 | 122 | 43 | 94 | 1,37 | 69 |
| LSRPM 160LR | 27,3 | 145 | 52 | 94 | 1,37 | 79 |
| LSRPM 200L | 33 | 175 | 79 | 94 | 1,37 | 135 |
| LSRPM 200L | 40 | 212 | 82,5 | 94,8 | 1,37 | 150 |
| LSRPM 200L | 55 | 292 | 115 | 95,7 | 1,37 | 165 |
| LSRPM 225ST1 | 70 | 371 | 143 | 96,1 | 1,37 | 193 |
| LSRPM 225MR1 | 85 | 451 | 172 | 96 | 1,37 | 223 |
| LSRPM 250ME | 100 | 531 | 204 | 96,1 | 1,37 | 285 |
| LSRPM 280SC | 125 | 663 | 248 | 96,3 | 1,37 | 330 |
| LSRPM 280SD | 150 | 796 | 295 | 96,4 | 1,37 | 380 |
| LSRPM 280MK1 | 175 | 928 | 330 | 96,5 | 1,37 | 568 |
| LSRPM 315SP1 | 195 | 1035 | 370 | 96,7 | 1,37 | 635 |
| LSRPM 315MR1 | 230 | 1220 | 425 | 96,9 | 1,37 | 720 |
| 1500 об/мин | ||||||
| LSRPM 90SL | 3 | 19 | 5,9 | 87 | 1,37 | 14 |
| LSRPM 90L | 3,7 | 24 | 7,2 | 89 | 1,37 | 17 |
| LSRPM 100L | 4,5 | 29 | 8,6 | 90 | 1,37 | 19 |
| LSRPM 100L | 5,2 | 33 | 9,9 | 91 | 1,37 | 24 |
| LSRPM 100L | 6 | 38 | 10,9 | 91,5 | 1,37 | 26 |
| LSRPM 132M | 8,2 | 52 | 16 | 91 | 1,37 | 40 |
| LSRPM 132M | 10,2 | 65 | 19,9 | 91,5 | 1,37 | 44 |
| LSRPM 132M | 12 | 76 | 23 | 92 | 1,37 | 49 |
| LSRPM 160MP | 15,6 | 99 | 30 | 92,5 | 1,37 | 60 |
| LSRPM 160MP | 19,2 | 122 | 37 | 93 | 1,37 | 69 |
| LSRPM 160LR | 22,8 | 145 | 43 | 93,5 | 1,37 | 79 |
| LSRPM 200L | 25 | 159 | 56 | 94 | 1,37 | 135 |
| LSRPM 200L | 33 | 210 | 75 | 94,6 | 1,37 | 150 |
| LSRPM 200L | 40 | 255 | 83 | 95,2 | 1,37 | 165 |
| LSRPM 200LU | 55 | 350 | 110 | 95,5 | 1,37 | 190 |
| LSRPM 225MR1 | 70 | 446 | 142 | 95,7 | 1,37 | 223 |
| LSRPM 250ME | 85 | 541 | 175 | 95,6 | 1,37 | 285 |
| LSRPM 280SC | 105 | 668 | 215 | 96,3 | 1,37 | 330 |
| LSRPM 280SD | 125 | 796 | 245 | 96,4 | 1,37 | 380 |
| LSRPM 280MK1 | 145 | 923 | 285 | 96,3 | 1,37 | 568 |
| LSRPM 315SP1 | 175 | 1114 | 350 | 96,5 | 1,37 | 635 |
| LSRPM 315MR1 | 220 | 1401 | 430 | 96,7 | 1,37 | 720 |
| 900 об/мин | ||||||
| LSRPM 90SL | 1,8 | 19 | 3,8 | 82 | 1,37 | 14 |
| LSRPM 90L | 2,2 | 24 | 4,6 | 84 | 1,41 | 17 |
| LSRPM 100L | 2,7 | 29 | 5,4 | 85 | 1,36 | 19 |
| LSRPM 100L | 3,1 | 33 | 6,2 | 87 | 1,37 | 24 |
| LSRPM 100L | 3,6 | 38 | 6,9 | 88 | 1,37 | 26 |
| LSRPM 132M | 4,9 | 52 | 9,9 | 88 | 1,37 | 40 |
| LSRPM 132M | 6,1 | 65 | 12,3 | 89 | 1,37 | 44 |
| LSRPM 132M | 7,2 | 76 | 14,3 | 90 | 1,37 | 49 |
| LSRPM 160MP | 9,4 | 99 | 18,4 | 90,5 | 1,47 | 60 |
| LSRPM 160MP | 11,5 | 122 | 23 | 91 | 1,37 | 69 |
| LSRPM 160LR | 13,7 | 145 | 27 | 91 | 1,37 | 79 |
| LSRPM 200L | 15 | 159 | 38 | 90,6 | 1,37 | 135 |
| LSRPM 200L | 20 | 212 | 43 | 91,6 | 1,37 | 150 |
| LSRPM 200L | 25 | 265 | 52 | 92,3 | 1,37 | 165 |
| LSRPM 200LU | 33 | 350 | 70 | 92,9 | 1,37 | 190 |
| LSRPM 250SE | 40 | 424 | 79 | 95,5 | 1,37 | 250 |
| LSRPM 250ME | 50 | 531 | 98 | 95,8 | 1,37 | 285 |
| LSRPM 280SD | 60 | 637 | 120 | 96,2 | 1,37 | 350 |
| LSRPM 280SD | 75 | 796 | 140 | 96 | 1,37 | 380 |
| LSRPM 280MK1 | 85 | 902 | 170 | 95,9 | 1,37 | 545 |
| LSRPM 315SP1 | 100 | 1061 | 190 | 96,2 | 1,37 | 625 |
| LSRPM 315MR1 | 130 | 1379 | 275 | 96,6 | 1,37 | 715 |
| 750 об/мин | ||||||
| LSRPM 90SL | 1,4 | 18 | 3 | 80 | 1,2 | 14 |
| LSRPM 90L | 1,8 | 23 | 3,7 | 83 | 1,2 | 17 |
| LSRPM 100L | 2,1 | 27 | 4,4 | 84 | 1,2 | 19 |
| LSRPM 100L | 2,5 | 32 | 5 | 85 | 1,2 | 24 |
| LSRPM 100L | 2,8 | 36 | 5,7 | 86 | 1,2 | 26 |
| LSRPM 132M | 4,1 | 52 | 8,5 | 86 | 1,2 | 40 |
| LSRPM 132M | 5,1 | 65 | 10,5 | 87 | 1,2 | 44 |
| LSRPM 132M | 6 | 76 | 12,2 | 88 | 1,2 | 49 |
| LSRPM 160MP | 7,8 | 99 | 15,6 | 89 | 1,2 | 60 |
| LSRPM 160MP | 9,6 | 122 | 19 | 90 | 1,2 | 69 |
| LSRPM 160LR | 10,8 | 138 | 21 | 90,5 | 1,2 | 79 |
| LSRPM 200L | 12,5 | 159 | 32 | 89,5 | 1,2 | 135 |
| LSRPM 200L | 16 | 204 | 35 | 90,8 | 1,2 | 150 |
| LSRPM 200L | 21 | 267 | 44 | 91,4 | 1,2 | 165 |
| LSRPM 200LU | 26 | 337 | 57 | 92,2 | 1,2 | 190 |
| LSRPM 250SE | 33 | 420 | 65 | 94,8 | 1,2 | 250 |
| LSRPM 250SE | 40 | 509 | 80 | 95,3 | 1,2 | 285 |
| LSRPM 280SD | 55 | 700 | 107 | 95,5 | 1,2 | 350 |
| LSRPM 280MD | 70 | 891 | 142 | 95,6 | 1,2 | 380 |
| LSRPM 315SP1 | 85 | 1082 | 171 | 95,9 | 1,2 | 625 |
| LSRPM 315MR1 | 110 | 1401 | 215 | 96,3 | 1,2 | 715 |
- Помощь в подборе оборудования и консультация по его применению
- Широчайший спектр электрооборудования и автоматики
- Гарантийное и послегарантийное обслуживание
- Гибкая ценовая политика и выгодные условия оплаты
Все о двигателях с постоянными магнитами
Электродвигатель позволяет создавать движение с помощью электричества. Это разнообразный класс машин, которые обеспечивают питание для огромного количества приложений и в настоящее время управляют автоматизацией, производством, коммерческими продуктами и т. Д. Универсальность этих двигателей обусловлена наличием многих типов электродвигателей, и в этой статье будет рассмотрена многообещающая конструкция — двигатель с постоянными магнитами. Первоначально разработанный на ранней стадии, этот двигатель быстро становится альтернативой отраслевым стандартам благодаря достижениям 21 века.Этот двигатель, его принципы работы и его применение будут исследованы в этом обсуждении и покажут, почему этот двигатель привлек столько внимания в последние годы.
Что такое двигатели с постоянными магнитами?
Двигатели с постоянными магнитами — это усовершенствованные двигатели, по конструкции похожие как на асинхронные, так и на серводвигатели (дополнительную информацию об этих двух конструкциях можно найти в наших статьях, посвященных асинхронным двигателям и серводвигателям). Они состоят из статора — внешнего корпуса — и ротора — подвижного компонента, соединенного с выходным валом двигателя.Как и другие двигатели переменного тока, двигатель с постоянными магнитами использует физику электромагнетизма для создания крутящего момента, и они делают это с помощью постоянных магнитов (обычно редкоземельных магнитов), встроенных в их ротор. Эта конструкция отличается от большинства других электродвигателей, в которых ротор либо генерирует собственное магнитное поле за счет индукции, либо за счет использования источника постоянного тока, либо просто состоит из ферромагнитного металла. Магниты в двигателе с постоянными магнитами при правильном расположении по отношению к статору могут обеспечивать скорость, равную частоте тока возбуждения, и поэтому считаются синхронным двигателем (см. Нашу связанную статью о синхронных двигателях, чтобы узнать больше).Эти двигатели должны быть соединены с электронным компонентом, который сглаживает крутящий момент этого двигателя, и именно поэтому эти машины только недавно достигли своего успеха в качестве жизнеспособной конструкции.
Как работают двигатели с постоянными магнитами?
Основная работа двигателя с постоянными магнитами такая же, как и у большинства электродвигателей; внешний статор удерживает обмотки катушек, питаемых от источника питания, а ротор свободно вращается за счет сил, передаваемых катушками статора. Многие из тех же основных принципов, что и для асинхронных двигателей, справедливы и для двигателей с постоянными магнитами, и дополнительную информацию можно найти в нашей статье об асинхронных двигателях.Это не означает, что это чисто машины переменного тока; фактически, большую часть своего срока службы они применялись как двигатели постоянного тока с постоянными магнитами (PMDCM) для небольших приложений. Однако мощность PMDCM довольно мала, и в этой статье основное внимание будет уделено двигателям переменного тока с постоянными магнитами (PMACM), поскольку они бывают больших размеров, предлагают большую мощность и могут сравниться с асинхронными двигателями с точки зрения прочности. , эффективность и количество использований.
Отличительная особенность PMACM — постоянные магниты внутри их ротора — на них действует вращающееся магнитное поле (RMF) обмоток статора, и они отталкиваются во вращательное движение.Это отклонение от других роторов, где магнитная сила должна создаваться или создаваться в корпусе ротора, что требует большего тока. Это означает, что PMACM обычно более эффективны, чем асинхронные двигатели, поскольку магнитное поле ротора является постоянным и не требует источника энергии для его генерации. Это также означает, что для работы им требуется частотно-регулируемый привод (VFD или PM), который представляет собой систему управления, которая сглаживает крутящий момент, создаваемый этими двигателями. Включая и выключая ток на обмотки статора на определенных этапах вращения ротора, привод с постоянными магнитами одновременно управляет крутящим моментом и током и использует эти данные для расчета положения ротора и, следовательно, скорости на выходе вала.Это синхронные машины, так как их скорость вращения совпадает со скоростью RMF. Эти машины относительно новые и все еще оптимизируются, поэтому конкретная работа любого PMACM на данный момент по существу уникальна для каждой конструкции.
Технические характеристики двигателей с постоянными магнитами Преобразователи PMACMимеют такие же характеристики, как и асинхронные двигатели, и дополнительные сведения об основных характеристиках этих двигателей можно найти в наших статьях об асинхронных двигателях. Ниже приведены некоторые важные спецификации, относящиеся к PMACM, которые могут помочь разработчикам выбрать правильный двигатель для своей работы.
Тип фазы
Модули PMACMв большинстве случаев питаются от трехфазного входа переменного тока, предназначенного для быстрого создания RMF, что делает их типом трехфазных двигателей. Важно понимать фазу используемого двигателя, поскольку однофазные двигатели по своей природе не запускаются автоматически, а трехфазные двигатели обычно имеют более высокие номинальные значения напряжения / крутящего момента. Более подробную информацию можно найти в наших статьях об однофазных двигателях и типах пускателей двигателей.
Поляки и зубчатые передачи двигателя
Полюса двигателя — это просто магнитные точки север-юг на статоре и роторе.В PMACM эти полюса постоянны в роторе и переключаются в статоре для вращения. Может возникнуть явление, известное как зубчатое движение двигателя, когда постоянное преодоление притяжения и отталкивания постоянных магнитов вызывает нежелательные рывки во время вращения ротора. Зубцы обычно возникают при запуске двигателя и могут вызывать вибрации, шум и неравномерное вращение. Увеличение числа полюсов в PMACM помогает уменьшить эту проблему, а также эффект пульсации крутящего момента (дополнительную информацию о пульсации крутящего момента можно найти в нашей статье о реактивных двигателях).Поэтому PMACM обычно имеют больше полюсов, чем асинхронные двигатели, что позволяет предположить, что им требуется более высокая входная частота для достижения аналогичных скоростей вращения.
Заметность и обратная связь с обратной связью
Эти двигатели должны поставляться со специализированным оборудованием системы управления, которое позволяет им работать наиболее эффективно. В PMACM значимостью является разница в индуктивности на клеммах двигателя при вращении ротора. Эта разница может привести к смещению ротора и статора, что может вызвать нежелательные зубцы / поломки.Для решения этой проблемы используется обратная связь с обратной связью, отслеживая точное положение ротора с помощью датчиков, а затем изменяя входной ток и скорость, чтобы обеспечить непрерывное вращение двигателя.
Температура Кюри
В определенных условиях постоянные магниты могут потерять свой магнетизм. Это размагничивание происходит при температуре Кюри — характеристика магнитов, где за пределами определенной температуры весь магнетизм теряется. Несмотря на то, что двигатели с постоянными магнитами, как правило, работают холоднее, чем другие конструкции, эта температура Кюри особенно важна, поскольку даже приближение к этому значению может вызвать деградацию PMACM.
Заявки и критерии отбора
Поскольку эти двигатели все еще разрабатываются, трудно обеспечить надежный метод выбора. Более полезно подчеркнуть преимущества этих двигателей по сравнению с существующими конструкциями, а также их недостатки, которые могут стать причиной выбора другого, более обычного двигателя.
Самым заманчивым преимуществом PMACM является то, что они обладают более высокой эффективностью благодаря упрощенному ротору. Этот КПД является исключительным при малых нагрузках по крутящему моменту и может сэкономить много кВтч энергии в таких устройствах.Эта экономия также увеличивается с увеличением размера двигателя, что позволяет PMACM конкурировать с обычными асинхронными двигателями в высокоскоростных приложениях с высоким крутящим моментом. Более высокая удельная мощность PMACM в сочетании с их высокоскоростными возможностями и эффективностью может дать асинхронным двигателям, таким как классические двигатели с короткозамкнутым ротором и с фазным ротором, экономию денег. Они также, как правило, занимают меньше места и отлично подходят для модернизации старых систем новыми, меньшими и более мощными PMACM. Будучи более дорогими, чем асинхронные двигатели, по первоначальной стоимости продукта, PMACM и их энергосбережение могут обеспечить полную окупаемость инвестиций чуть более чем за год.Они также являются синхронными, что позволяет им работать там, где асинхронные двигатели не могут. PMACM также имеют более низкую температуру, чем асинхронные двигатели, что увеличивает их надежность и срок службы.
Главный недостаток также является причиной их успеха в качестве двигателя; они нуждаются в точном оборудовании систем управления для работы и бесполезны без него. Эти системы увеличивают сложность установки и эксплуатации и могут увеличить первоначальную стоимость PMACM. Другой серьезной проблемой, связанной с этими типами двигателей, является их потребность в редкоземельных магнитах (самарий, неодим и т. Д.).), которые облагаются экологическими налогами и демонстрируют неустойчивые рыночные цены. Таким образом, хотя они энергоэффективны в использовании, они экологически вредны для производства, и их цены могут колебаться в зависимости от постоянно меняющихся цен на магнитных рынках.
В настоящее время эти двигатели используются в электромобилях, модификациях, конвейерах, миксерах, измельчителях, насосах, вентиляторах, воздуходувках и приложениях, для которых также подходят асинхронные двигатели. Как объяснялось ранее, эти двигатели все еще исследуются и не так популярны, как традиционные конструкции.Однако по прошествии некоторого времени и дополнительных усилий двигатель с постоянными магнитами может стать отраслевым стандартом для производства механической энергии на рынке.
Сводка
В этой статье представлено понимание того, что такое двигатели с постоянными магнитами и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https: // www.sevenhwave.org/new-technologies/permanent-magnet-alternating-current-motors
- https://www.xcelenergy.com/staticfiles/xe-responsive/Programs%20and%20Rebates/Business/MN-Motors-PMAC-Information-Sheet.pdf
- https://michaelsenergy.com/briefs/permanent-magnet-ac-motors/
- https://www.mtecorp.com
- https://www.machinedesign.com/#menu
- https://geosci.uchicago.edu
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Новое открытие может привести к коммерческому производству двигателей с постоянными магнитами
Ряд читателей усомнились в правдивости технологии, представленной в этой статье.Чтобы решить их проблемы, мы провели дополнительную информацию, которую можно найти здесь.
Постоянные магниты являются неотъемлемой частью многих двигателей, в которых используются преимущества достижений в получении мощных и стабильных магнитных материалов.
Сегодня редкоземельные магниты, содержащие элементы лантаноидов, такие как неодим и самарий, обладают большим магнитным моментом. Например, неодимовый (NdFeB) магнит, состоящий из неодима, железа и бора и имеющий размеры всего 10,16 см X 10,16 см X 5,08 см, может иметь Brmax 14,800, поверхностное поле Gauss в 4,933, тяговое усилие 557 кг и стабильный при 176ºF.Если магнит не будет перегрет или физически поврежден, он потеряет менее 1% своей силы за 10 лет.
Чтобы увидеть влияние постоянных магнитов, мы должны взглянуть на типичный электродвигатель. Когда внешний источник энергии проходит через поле ротора, он служит электромагнитом, который притягивается к постоянному магниту, заставляя двигатель вращаться (рис. 1A). Для продолжения вращения электромагнит позволяет полю ротора изменять полярность его магнитного поля (рис. 1B), вызывая отталкивание.Сила отталкивания между полюсами отталкивает электромагнит по его пути движения. Если полярность ротора не меняется, сила притяжения, притягивающая электромагнит к постоянному магниту, будет препятствовать выходу электромагнита и заставит его вернуться и остановиться напротив постоянного магнита.
Электродвигатель, в котором используются постоянные магниты, не имеет обмоток возбуждения, которые служат электромагнитами на раме статора. Вместо этого постоянные магниты на раме статора создают магнитные поля, которые взаимодействуют с полем ротора, создавая крутящий момент.Это устраняет необходимость в питании статора, тем самым снижая потребление электроэнергии.
Электродвигатели, с использованием постоянных магнитов или без них, производят вращение из повторяющейся последовательности притяжения с последующим отталкиванием, что требует изменения полярности. Было предпринято множество попыток сконструировать двигатель, использующий только постоянные магниты для создания магнитных полей как для статора, так и для ротора, но они не увенчались успехом.
Такой двигатель мог бы работать полностью за счет собственных магнитных полей, создаваемых постоянными магнитами.Представленное здесь открытие позволяет постоянным магнитам последовательно притягиваться и отталкиваться, создавая непрерывное движение, как у электродвигателя, без изменения полярности или использования внешнего источника энергии.
Большинство из нас имели дело с постоянными магнитами и испытывали силы притяжения и отталкивания, возникающие между ними. Легко представить, что магниты работают на нас. Например, сила притяжения между двумя достаточно сильными постоянными магнитами может перемещать объект, когда магниты сближаются.Однако, чтобы магниты повторили эту работу, их нужно разобрать.
Количество работы или механической энергии, необходимой для разрыва магнитов, аналогично количеству механической энергии, генерируемой магнитами, когда они сближаются. Соответственно, постоянные магниты не могут работать непрерывно сами по себе без внешнего источника механической энергии, многократно разъединяющего их.
На рис. 2 показаны типичные силовые линии между противоположными полюсами двух постоянных магнитов, которые создают обычно наблюдаемую силу притяжения, действующую в полярной (вертикальной) плоскости.Сила притяжения, создаваемая достаточно сильными магнитами, может стягивать магниты на расстоянии, пока они не придут в контакт друг с другом. Сила притяжения между противоположными полюсами также может стягивать магниты вместе в экваториальной (горизонтальной) плоскости, пока они не остановятся напротив друг друга. На рис. 3 показаны силовые линии, ответственные за это горизонтальное притяжение.
Обычно силы притяжения и отталкивания существуют между двумя магнитами с противоположными полюсами, как показано на рис.4. Однако сила отталкивания в полярной плоскости обычно очень мала по сравнению с силой притяжения в той же плоскости, что приводит к тому, что результирующая сила является притяжением. Мы создали уникальное состояние, в котором поля двух постоянных магнитов с противоположными полюсами одновременно создают результирующую силу притяжения между ними в экваториальной плоскости и результирующую силу отталкивания в полярной плоскости.
На рис. 5 показаны силовые линии, ответственные за одновременное экваториальное притяжение (синие стрелки) и полярное отталкивание (красные стрелки) между парой постоянных магнитов.Необычное результирующее отталкивание в полярной плоскости является результатом формы магнитов и их положения и возникает между одинаковыми полюсами, даже если магниты имеют свои противоположные полюса, обращенные друг к другу.
Результирующая сила притяжения, действующая в экваториальной плоскости, может использоваться для стягивания магнитов по горизонтали. Результирующая сила отталкивания, действующая в полярной плоскости, может, в свою очередь, использоваться для вертикального раздвигания магнитов без изменения полярности или использования другой энергии.Таким образом, два постоянных магнита притягиваются друг к другу под действием силы притяжения, а затем раздвигаются без помощи внешней силы или другой энергии.
Обычно необходимо приложить внешнюю силу, чтобы разделить два постоянных магнита, которые стянулись вместе с их силой притяжения. До сих пор мы не наблюдали, чтобы два постоянных магнита последовательно притягивались и отталкивались без посторонней помощи. Эта последовательность притяжения с последующим отталкиванием подобна последовательности притяжения-отталкивания, которая возникает в электродвигателе между постоянным магнитом и электромагнитом.
Демо-версия Attract-Repel
Мы сконструировали прибор, чтобы продемонстрировать одновременное результирующее притяжение в экваториальной плоскости и результирующее отталкивание в полярной плоскости между двумя постоянными магнитами с противоположными полюсами, обращенными друг к другу. Для уменьшения трения при движении постоянные магниты были прикреплены к тележкам с восемью колесами. На каждой тележке размещено по четыре постоянных магнита.
Магниты изготовлены из неодима (NdFeB) марки 52, размерность 5.08 см в длину, 2,54 см в ширину и 1,27 см в толщину. Они были намагничены на всю толщину 1,27 см. Каждый магнит имеет Brmax 14 800 Гаусс и тяговое усилие 41,28 кг. Чтобы минимизировать магнитные помехи, тележки и рельсы были изготовлены из алюминиевого сплава, а винты и гайки — из латуни.
Результирующие силы притяжения и отталкивания были измерены с помощью цифрового датчика силы IMADA модели DS2-110. Результирующие силы, приложенные к тележкам, измерялись с интервалом 3,18 мм по горизонтальной и вертикальной траекториям движения.Были проведены измерения результирующей силы притяжения в экваториальной плоскости, ответственной за горизонтальное движение, как показано на рис. 6. Были также проведены измерения результирующей силы отталкивания в полярной плоскости, ответственной за вертикальное движение (рис. 7).
Суммарные значения силы притяжения в экваториальной плоскости и силы отталкивания в полярной плоскости представлены на рис. 8. Избыток механической энергии доступен из общей силы (механической энергии), доступной во время фаз притяжения и отталкивания.Этот излишек энергии можно использовать для работы, например, для привода электрогенератора. Приведенные здесь данные предназначены только для иллюстрации явления и не представляют оптимальных условий для максимальной отдачи энергии.
Соображения по конструкции двигателя
Повторение описанной здесь последовательности притяжения и отталкивания требует, чтобы магниты вернулись в свои исходные положения. Однако небольшое расстояние, пройденное описанными здесь магнитами, оставляет их в пределах полей притяжения и отталкивания, ответственных за их первоначальное движение.Следовательно, возвращению магнитов в их исходное положение будут препятствовать эти остаточные силы притяжения и отталкивания соответственно.
Значительное количество механической энергии должно быть потрачено на преодоление этих сил при возврате магнитов. Эти противодействующие остаточные силы и затраты энергии на их преодоление могут быть значительно уменьшены за счет увеличения расстояния, пройденного магнитами H и V. Например (рис. 9), если магнит V перемещается 15.24 см по вертикали вместо 6,35 см, магнит H мог бы затем вернуться в горизонтальное положение в исходное положение, не встречая значительного сопротивления со стороны силы притяжения в полярной плоскости.
При увеличенных расстояниях перемещения результирующая сила притяжения в экваториальной плоскости изначально будет слишком слабой, чтобы тянуть магнит H горизонтально. На рис. 9 показано, как пары магнитов могут быть связаны друг с другом для буксировки друг друга на участке их пути. Сила отталкивания между магнитами V1 и h2 достаточно велика, чтобы магнит V1 тянул магнит h3 ближе к магниту V2, где силы притяжения сильнее.В свою очередь, сила притяжения между магнитами V2 и h3 может тянуть магнит V1 дальше от магнита h2. Движение, создаваемое двумя парами магнитов, соединенных вместе, показано на рис. 9.
Это соединение пар магнитов в разных фазах последовательности притяжения и отталкивания похоже на расположение поршней в двигателе внутреннего сгорания, в котором такт сгорания одного поршня приводит в действие такт выпуска другого поршня. Другое сходство заключается в том, что и магниты, и поршни движутся по линейным путям, поскольку они обеспечивают механическую энергию.
Механическую энергию можно сохранить, заставив магниты работать на обоих концах своего пути. Таким образом, энергия не тратится на возвращение магнитов в исходное положение для повторения цикла. Подключение четырех пар магнитов завершает цикл, обеспечивая непрерывное движение, полностью управляемое постоянными магнитами.
Здесь отмечается, что статор и ротор в обычном электродвигателе требуют нескольких пар магнитов для достижения непрерывного движения.Последовательность притяжения и отталкивания между одним магнитом статора и электромагнитом (ротором) не может создать достаточную инерцию, чтобы повернуть ротор на один полный оборот и повторить цикл. Аналогичным образом, описанный здесь метод требует использования нескольких пар постоянных магнитов для увеличения расстояния перемещения и завершения цикла.
Коммерческое приложение
Описанный здесь метод иллюстрирует, как одни только постоянные магниты могут быть использованы для создания непрерывного движения и обеспечения излишка механической энергии, которая может быть использована для других целей, таких как приведение в действие электрического генератора.
По многим причинам электромагнитная энергия постоянных магнитов является очень практичным, чистым и богатым источником энергии. Было подсчитано, что электромагнитная сила на 39 порядков сильнее гравитационной силы, и ее внутренний источник многочислен. Количество энергии, необходимое для создания постоянных магнитов, незначительно по сравнению с количеством электромагнитной энергии, фактически доступной от них после их намагничивания. Железо, наиболее распространенное ферромагнитное вещество, является вторым по распространенности металлом на Земле.
Мощные магниты, содержащие неодим и самарий, не требуются для выработки практического количества чистой механической энергии с использованием описанного здесь метода. Могут использоваться другие более слабые постоянные магниты. Стабильность (коэрцитивная сила) и сила (магнитный момент) постоянных магнитов сегодня чрезвычайно высоки. Величина электромагнитных сил, возникающих между парами магнитов для генерации механической энергии, как описано здесь, ниже значения коэрцитивной силы магнитов. Следовательно, магниты останутся стабильными при нормальных условиях эксплуатации.
Будущее
Создан двигатель с постоянными магнитами, который проходит испытания. Кроме того, на двигатель подана заявка на патент, и его детали не будут доступны до тех пор, пока патент не будет выдан.
Одна особенность, которую еще предстоит определить, — это лучший способ включения и выключения двигателя. С обычным электродвигателем вы просто используете переключатель для включения питания, чтобы активировать двигатель, а затем выключите питание, чтобы остановить двигатель. Вы не можете этого сделать с двигателем, состоящим из постоянных магнитов.Рассматриваются несколько методов прерывания. Один из подходов — использовать электромагнит для торможения. Электромагнит будет запитан только в период торможения и отключен, когда двигатель работает.
Список литературы
1. Уленбек Г. Э., Гоудсмит С. Спиновые электроны и структура спектров. Природа. 117, 264-265 (1926).
2. Фоли Х., Куш П. О собственном моменте электрона. Physical Review 73, 412-412 (1948).
3. Фейнман Р. Электромагнетизм. Лекции Фейнмана по физике. 2, Глава 1 (1962).
4. М. Э. Пескин, Д. В. Шредер, Введение в квантовую теорию поля (Westview Press, Нью-Йорк, 1995).
5. Р. Пенроуз, Новый разум императора: о компьютерах, разуме и законах физики (Oxford University Press, Oxford, 1989).
6. У. Л. Эрик, Магнетизм: вводный обзор (Courier Dover Publications, Нью-Йорк, 1963).
Индукция против.КПД двигателя с постоянным магнитом
Поскольку электрификация автомобилей продолжается ускоренными темпами, многие задаются вопросом, какой тип двигателя лучше всего подходит для современной электрической трансмиссии.
Может быть трехфазный асинхронный двигатель или двигатель с постоянными магнитами? Оба мотора в настоящее время используются в электромобилях. Оба предлагают высокую эффективность и хорошую производительность. Но что лучше?
Существует веских аргументов в пользу того, что двигатель с постоянными магнитами лучше по сравнению с асинхронным двигателем.Неотъемлемые преимущества порошковой металлургии — возможность повышения производительности двигателя и снижения общей стоимости — могут быть эффективным инструментом при производстве этих приводных систем.
Давайте проведем несколько сравнений эффективности асинхронных двигателей с двигателями с постоянными магнитами, чтобы увидеть их преимущества и потенциальные недостатки. Мелкие детали конструкции электродвигателя более сложны, чем описано ниже, но это отличное начало для тех, кто взвешивает свои варианты.
КПД двигателя с постоянным магнитом
Как следует из названия, электромотор с постоянными магнитами использует постоянные магниты на роторе (см. Рисунок ниже).Переменный ток, приложенный к статору, приводит к вращению ротора. Поскольку магниты постоянно намагничены, ротор может работать синхронно с коммутируемым переменным током. Проскальзывание, необходимое в асинхронных двигателях, устранено, повысив тепловую эффективность.
Собственный КПД двигателя с постоянными магнитами выше, чем у асинхронного двигателя. Оба двигателя имеют трехфазную конструкцию благодаря полностью оптимизированной производительности. Однако асинхронные двигатели были разработаны для работы в основном на частоте 60 Гц. При увеличении частоты потери на вихревые токи в асинхронных двигателях будут намного больше, чем в двигателях с постоянными магнитами, использующих технологию порошкового металла.
Независимо от того, как вы изгибаете или формируете асинхронный двигатель, хорошо спроектированный синхронный двигатель с постоянными магнитами обеспечит увеличенный диапазон, лучшую производительность и т. Д.
Использование материала двигателя с постоянным магнитом
В постоянном магните ротор теперь может быть сплошной деталью, например, из магнитного материала порошковой металлургии, полученного методом прессования и спекания.Вы можете сконструировать ротор таким образом, чтобы магниты были приклеены к внешнему диаметру или заключены в ротор, как показано ниже:
( Сравнение асинхронного двигателя переменного тока и двигателя с постоянными магнитами)
Необязательно делать из листовой электротехнической стали! Ротор из порошкового металла может иметь прорези, которые вы видите на изображении выше, спроектированные за счет чистой формы порошкового металла, что устраняет необходимость в дорогостоящей механической обработке. Используя спеченный магнитомягкий материал, силовой металлический ротор для двигателя с постоянными магнитами может достигать прочности, аналогичной конкурирующим процессам.
Однако индукционный ротор по-прежнему требует штамповки и ламинирования. В процессе штамповки образуется гораздо больше отходов, чем при порошковой металлургии.
Применение постоянных магнитов в двигателях
Постоянный двигатель мощностью 50 кВт (около 70 л.с.) обычно весит менее 30 фунтов. (Обратите внимание, что вам все равно понадобится инвертор постоянного тока в переменный, чтобы генерировать достаточное напряжение и частоту.)
Использование двигателей с постоянными магнитами в автомобильной промышленности включает Chevy Volt (производство прекращено), Chevy Bolt и Tesla Model 3.
- Chevy Bolt — это конструкция мощностью 200 л.с. с магнитами внутри ротора. В нем используется односкоростной редуктор с соотношением 7,05: 1 для привода колес. Общедоступных оценок веса нет.
- Tesla Model 3 также использует двигатель с постоянными магнитами. Доступно очень мало деталей, но ходят слухи, что магниты расположены в виде массива Halback. Этот массив фокусирует магнитные линии потока для полной оптимизации производительности.
Скорость двигателя с постоянными магнитами такая же, как и у его индукционного аналога:
- Нс = 120 * частота / число полюсов
(Ns — синхронная скорость.Число полюсов — это общее число полюсов на фазу, включая северный и южный полюса.)
Помните, ротор не будет скользить относительно рабочей частоты статора.
Стоимость против. Производительность
Одним из основных факторов, влияющих на двигатели с постоянными магнитами, является стоимость магнитов. Если вы использовали высокоэнергетические магниты (такие как железо, неодим, бор), вы почувствовали боль в своем бюджете (или у вашего начальника). Потенциальные потери при штамповке ламинирующего материала только усугубляют проблему.
Возможности для порошковой металлургии в этих типах двигателей изобилуют. Роторы двигателя с постоянными магнитами могут быть изготовлены из спеченного порошкового металла, независимо от того, выбираете ли вы внутреннюю или внешнюю конструкцию. Статор также может быть изготовлен из магнитомягких композитов. При ожидаемых высоких частотах переключения потери в SMC ниже, чем в ламинированном 3% кремнистом железе, , что еще больше повышает эффективность этой конструкции. Проще говоря, магнитомягкие композиты созданы специально для высоких частот.
Металлический порошок может повысить эффективность двигателя с постоянными магнитами по сравнению с асинхронным двигателем. Возможности порошковой металлургии по формированию трехмерной формы позволяют формировать статор, полностью покрывающий весь провод магнитомягким композитом, чтобы исключить потери на конце витка. .
Это некоторые из многих преимуществ, которые предлагает порошковый металл — как спеченные магнитомягкие материалы, так и SMC.
(Кривая КПД двигателя с постоянным магнитом в зависимости отасинхронные двигатели. Эта диаграмма характеристик была разработана для частоты сети около 60 Гц. Ожидайте, что по мере увеличения частоты производительность станет еще лучше. График любезно предоставлен Empowering Pumps & Equipment )
Вышеупомянутое обсуждение было сосредоточено на рассмотрении двигателей с постоянными магнитами, в которых используются конструкции статора, аналогичные тем, которые используются в асинхронных двигателях переменного тока. Однако было сделано основных разработок в конструкции двигателей нового типа , в которых также используются постоянные магниты для повышения эффективности электродвигателя.
Linear Labs разработала новую схему двигателя, сочетающую высокую эффективность с прочной конструкцией. Это устраняет некоторые из дорогих редкоземельных магнитов, с которыми вы привыкли годами.
Мы думаем, что двигатели с постоянными магнитами — это волна будущего. Для полноты картины давайте теперь посмотрим на конструкцию асинхронного двигателя, с которой работают 90% инженеров.
КПД трехфазного асинхронного двигателя переменного тока
Никола Тесла изобрел асинхронный двигатель в 1883 году.По сути, это та же базовая конструкция статора, что и у постоянного двигателя, но без постоянных магнитов.
Его основной принцип работы заключается в том, что магнитное поле, создаваемое в статоре, создает встречный ток в стержнях ротора. Индуцированный ток ротора затем создает магнитное поле в пластинах ротора. Это противоположное поле заставляет ротор вращаться — при переключении тока статора ротор всегда отстает и заставляет ротор вращаться.
Преимущества этого индуцированного магнитного поля заключаются в том, что не нужны ни щетки, ни обмотка ротора.Двигатели этого типа:
- Надежный
- Прочный
- Низкие эксплуатационные расходы
Выше представлена типичная конфигурация асинхронного двигателя. Обратите внимание, что ротор имеет пластинки в сердечнике и электропроводящий материал (медь или алюминий) в пазах ротора, так называемые стержни ротора.
Для большинства промышленных применений (более 1 л.с.) и для автомобильных трансмиссий трехфазный асинхронный двигатель является самым распространенным явлением.В этой конструкции три фазы обернуты вокруг статора таким образом, чтобы обеспечить более плавную работу и высокий КПД. Трехфазные двигатели переменного тока самозапускаются при подаче напряжения на обмотки статора. Во многих случаях так называемые стержни ротора расположены под углом для увеличения крутящего момента.
Эффективность асинхронного двигателя переменного тока на практике
Трехфазное использование в промышленных приложениях относительно просто, поскольку входящее напряжение уже является трехфазным. Однако в автомобильной промышленности вам необходимо преобразовать мощность постоянного тока аккумулятора в трехфазный переменный ток.Это происходит через преобразователь постоянного тока в переменный.
В асинхронных двигателях переменного тока необходимо учитывать скорость ротора относительно входящей частоты переменного тока. Первоначально это определяется так называемой синхронной скоростью. Для асинхронного двигателя переменного тока синхронная скорость рассчитывается следующим образом:
- Нс = 120 * частота / число полюсов
(Помните, что Ns — это синхронная скорость. Число полюсов — это общее число полюсов на фазу, включая как северный, так и южный полюса.)
Для двухполюсного асинхронного двигателя переменного тока, работающего при 60 Гц, синхронная скорость двигателя будет 3600 об / мин. Однако, если бы в этой конфигурации ротор вращался со скоростью 3600 об / мин, у вас был бы нулевой крутящий момент от двигателя. В идеале должно быть некоторое проскальзывание ротора относительно частоты; обычно это около 5%. Таким образом, эти двигатели считаются асинхронными двигателями.
КПД трехфазных асинхронных двигателей может варьироваться от 85% до 96%. См. Таблицу ниже для зависимости крутящего момента отсоскальзывать.
(Типичный крутящий момент в зависимости от скольжения для асинхронных двигателей переменного тока — любезно предоставлено All About Circuits )
Асинхронные двигатели мощностью 50-100 л.с. для промышленного применения различаются массой от 700 до почти 1000 фунтов. Слишком тяжелый для автомобильного применения, не так ли?
Утверждается, что некоторые модели асинхронных двигателей Tesla весят всего 70 фунтов. и может генерировать 360 л.с. при 18 000 об / мин. Общий вес двигателя и инвертора составляет около 350 фунтов.- все еще намного легче, чем средний двигатель внутреннего сгорания.
Этот двигатель представляет собой трехфазный двигатель с восемью полюсами на фразу, что означает, что частота переменного тока, используемая для выработки этой мощности, составляет около 1200 Гц. На этих рабочих частотах вихретоковый нагрев ламинирующего материала будет довольно высоким. Этот автомобильный мотор Tesla требует значительного охлаждения, чтобы не допустить его перегрева. Также немного иронично, что GM представила свой автомобиль EV1 в середине 90-х годов с асинхронным двигателем, который был ограничен тем фактом, что в нем использовались свинцово-кислотные вместо литий-ионных батарей.
Стоимость асинхронных двигателей
Ключевым преимуществом асинхронных двигателей переменного тока для электромобилей является стоимость. Они относительно дешевы в сборке.
В индукционных конструкцияхпеременного тока используются стальные листы как в статоре, так и в роторе; их можно штамповать почти одновременно из одного листа материала. Другими словами, процент брака намного ниже, чем у вашей средней работы по штамповке.
Однако уникальный дизайн автомобильного мотора Tesla немного дороже.Трудно найти точную цену в Интернете, но вариант с полным приводом для Tesla добавляет около 4000 долларов к общей стоимости автомобиля. Вы также должны учитывать повышенные требования к охлаждению на этих высоких частотах переменного тока.
Индукция против. Эффективность двигателя с постоянным магнитом: победитель …
Несмотря на преимущества использования магнитомягких материалов в двигателе с постоянными магнитами — SMC не являются фактором в индукционных конструкциях — выбор типа двигателя для вашей трансмиссии затруднен.У каждого есть свои преимущества и недостатки.
Несмотря на то, что асинхронный двигатель переменного тока был впервые разработан более 100 лет назад, он по-прежнему жизнеспособен благодаря повышению эффективности и производительности в 20-м и 21-м веках. Двигатель с постоянными магнитами — относительная новинка, но обещает более высокую производительность и, возможно, меньший вес.
Основным камнем преткновения для двигателей с постоянными магнитами является потенциально высокая стоимость магнитов. К счастью, на горизонте есть многообещающие разработки, которые могут устранить этот недостаток.
Мы пользуемся услугами уважаемого дизайнера двигателей, чтобы помочь клиентам с такими проектами. Если вам нужна помощь в разработке компонентов, чтобы в полной мере использовать весь потенциал порошковой металлургии для магнитных приложений переменного или постоянного тока, посетите наш новый ресурсный центр или свяжитесь с нами!
Исторический обзор двигателей с постоянными магнитами
В наши дни рынок двигателей наводнен двигателями с постоянными магнитами. Темпы роста бесщеточных двигателей с постоянными магнитами, превышающие 100 процентов, являются нормой, а не просто удачей.Но привлекательные темпы роста двигателей с постоянным магнитом сегодня ожидались еще долго. Назовите это окольным маршрутом или историческим путешествием, но практическое применение двигателей с постоянными магнитами началось только через много десятилетий после изобретения первых электродвигателей. Первые электродвигатели, которые были не более чем лабораторными приспособлениями, использовали стержневые магниты. К сожалению, эти магниты были настолько плохого качества, что первые двигатели с постоянными магнитами были непрактичны для промышленного использования. Но это ограничение подготовило почву для многочисленных изобретателей, которые начали экспериментировать с магнитами разных размеров, форм, конфигураций и материалов, что в конечном итоге привело к созданию мощных и компактных магнитов, используемых сегодня в двигателях с постоянными магнитами.
Постоянные магниты: первые электродвигатели
Все первые изобретатели электрических вращающихся машин (позднее названных электродвигателями) использовали в своих конструкциях постоянные магниты. Но эти «машины» не были двигателями в том смысле, в каком мы их понимаем сегодня. Майкл Фарадей был одним из первых экспериментаторов в развивающейся области электричества и электромагнетизма. Он построил вращающуюся электрическую машину, которую обычно называют первым электродвигателем. Применяя идеи Ганса Христиана Эрстеда о «создании магнитного поля электрическим током», а также Уильяма Волластона, экспериментатора, который получил токопроводящую проволоку, вращающуюся вокруг оси с помощью магнита, Фарадей построил лабораторное устройство, которое преобразовало электрическая энергия в механическое (вращательное) движение.В этом устройстве использовались как фиксированные, так и вращающиеся постоянные магниты с проводами, прикрепленными к чашам с ртутью и батарее. Когда батарея была подключена к проводам, в цепи протекал ток, и генерируемое электромагнитное поле взаимодействовало с постоянными магнитами, создавая крутящий момент и вызывая механическое движение.
После «двигателя» Фарадея другие изобретатели быстро последовали за усовершенствованиями, которые больше напоминали двигатели, которые мы знаем сегодня. В 1882 году Питер Барлоу изобрел вращающееся колесо, известное как колесо Барлоу, которое вызывало механическое движение, когда колесо опускалось до тех пор, пока спица не погружалась в ртуть, а напряжение было приложено к стержням крепления.
В 1837 году американский изобретатель и кузнец Томас Дэвенпорт получил первый патент на электродвигатель. Этот двигатель был улучшением предыдущих разработок, над которыми он работал с Оранджем Смолли и Рэнсомом Куком, и основан на соленоиде (электромагните), который он купил у изобретателя Джозефа Генри. «В запатентованной конструкции Davenport используются четыре вращающихся электромагнита, которые переключаются с помощью коммутатора, и фиксированные постоянные магниты в форме кольца. Двигатель вращался со скоростью около 1000 оборотов в минуту и [мог] поднимать 200-фунтовый груз на один фут за одну минуту, что соответствует мощности 4.5 Вт. » Несмотря на то, что двигатель Давенпорта был улучшен, он не смог продать достаточно акций, чтобы профинансировать свой бизнес, и вышел из бизнеса. В то время как Давенпорт использовал постоянные магниты в своем двигателе, другие изобретатели уже двигались к чему-то лучшему, заменив постоянные магниты электромагнитами. Это изменение привело к разработке двигателей промышленного качества, которые стимулировали рост рынка электромагнитных двигателей постоянного тока в течение многих лет до появления высококачественных постоянных магнитов, которые были произведены почти столетие спустя.
Электромагниты: историческая пауза для двигателей с постоянными магнитами
Первые изобретатели электродвигателей довольно рано знали, что электродвигатели с постоянными магнитами имеют серьезные ограничения в том, что касается их практического применения. В 1882 году электрик Джон Уркхарт написал в своем трактате об электродвигателях, что «когда электродвигательная машина предназначена для передачи значительного количества энергии, рекомендуется заменить постоянные магниты электромагнита- ми. Значительное увеличение мощности дают двигатели, оснащенные электромагнитами вместо ПМ.Кроме того, размер и вес двигателя могут быть значительно уменьшены. Стоимость намного меньше, и машина способна преобразовывать гораздо большую мощность тока в механический эффект ».
Британский изобретатель Уильям Стерджен считается изобретателем первого электромагнита в 1825 году. Несколько лет спустя, в 1827 году, венгерский изобретатель Иштван (Аньош) Йедлик изобрел «первую вращающуюся машину с электромагнитами и коммутатором», которая была предшественницей современный двигатель постоянного тока. Но первый практический электромагнитный двигатель постоянного тока был изобретен Морицем Германом Якоби в 1834 году.Двигатель Якоби поднимал от 10 до 12 фунтов со скоростью один фут в секунду, что составляет около 15 Вт механической мощности. С интересной (хотя и скромной) заметкой Якоби писал в 1835 году, что «он не был единственным изобретателем электромагнитного двигателя. Он указал на приоритет изобретений Ботто и Даль Негро.
Хотя электромагнитные двигатели постоянного тока были «впервые популяризированы в 1880-х годах, когда постоянный ток был основным источником энергии», их использование коренным образом изменилось, когда Никола Тесла в 1889 году изобрел электромагнитный двигатель переменного тока.Имея всего две части, неподвижный статор и ротор, двигатель переменного тока был проще, чем электромагнитные двигатели постоянного тока. «Неподвижный статор создавал вращающееся электромагнитное поле, в то время как ротор, прикрепленный к выходному валу, получал крутящий момент от вращающегося магнитного поля. Магнитное поле создавалось двумя или более переменными токами, не согласованными друг с другом, и было названо многофазной системой ». Несмотря на простоту, предлагаемую двигателем переменного тока Tesla, у него были проблемы с управляемостью и работоспособностью, которые позволяли двигателям постоянного тока сохранять устойчивое присутствие в промышленных приложениях в течение многих десятилетий.Но возвращение двигателей с постоянными магнитами приближалось, так как на горизонте стояла разработка высокоэнергетических постоянных магнитов.
Возвращение двигателей с постоянными магнитами
Вплоть до двадцатого века использование постоянных магнитов ограничивалось естественным магнетитом, обычно называемым магнетитом. Но в начале века мир увидел то, что можно охарактеризовать как возрождение, в открытии новых типов магнитных материалов, таких как углерод, кобальт и вольфрамовая сталь.Однако эти первые новые магнитные материалы все еще были низкого качества. Только после разработки магнитов Alinco мир получил высококачественный магнит, который можно было бы использовать во многих сферах, и открыл дверь для возвращения двигателей с постоянными магнитами.
После обширных исследований в 1930-х годах было обнаружено, что «значительные добавки алюминия, никеля и кобальта в растворе с железом дают высокоэффективные и коммерчески жизнеспособные PM, полученные путем обычного литья слитков.Названные магнитами Алнико, они были в 100 раз сильнее любого магнитного камня ». В 1950-х годах появились ферритовые (керамические) постоянные магниты, которые использовались в двигателях для небольших приборов. Но в 1960-х годах был сделан еще один важный шаг в расширении использования PM в электродвигателях, когда были изобретены соединения редкоземельных металлов (самария) и кобальта. Эти материалы PM были важны сами по себе. Тем не менее, они были омрачены изобретением в 1980-х годах неодим-железо-борных ПМ, которые «давали как более высокоэнергетический продукт, так и были более распространены, чем редкие самарий и кобальт.«Бесщеточные двигатели постоянного тока с постоянными магнитами начали появляться на рынке только в 1970-х годах. Задержка была связана не только с разработкой высокоэнергетических PM, но и с разработкой силовых устройств и электронных контроллеров, которые могли заменить механическую коммутацию на электронную коммутацию.
Будущее: постоянные магниты из нанокомпозитов
Что ждет двигатели с постоянными магнитами в будущем? Имеющиеся данные свидетельствуют о том, что их использование будет продолжать расти по мере их использования в новых приложениях.Однако на горизонте появляются новые инновации в области высокоэнергетических постоянных магнитов. Одно из таких нововведений — постоянные магниты из нанокомпозитов. Эти магниты представляют собой «искусственно сконструированные магнитные структуры (называемые метаматериалами , ), которые создают сильные постоянные магниты путем изготовления наноструктурированных композитных материалов с твердой / мягкой фазой» с размерами менее a микрометра. В настоящее время они используются в биомедицине, магнитных носителях информации, разделении магнитных частиц, сенсорах, катализаторах и пигментах.В будущем мир может увидеть применение нанокомпозитных магнитных материалов в будущих поколениях электродвигателей с постоянными магнитами.
Двигатель с постоянным магнитом — обзор
6.5.3 Шаговый двигатель
Шаговый двигатель или шаговый двигатель производит вращение на равные углы, так называемые шаги , для каждого цифрового импульса, подаваемого на его вход. Например, если с таким двигателем 1 входной импульс производит вращение на 1,8 °, то 20 входных импульсов будут производить вращение на 36 °.0 °, 200 входных импульсов на один полный оборот на 360 °. Таким образом, его можно использовать для точного углового позиционирования. При использовании двигателя для привода непрерывного ремня угловое вращение двигателя преобразуется в линейное движение ремня, что позволяет достичь точного линейного позиционирования. Такой двигатель используется с компьютерными принтерами, плоттерами x — y , роботами, станками и широким спектром инструментов для точного позиционирования.
Существует два основных типа шаговых двигателей: тип с постоянным магнитом, тип с ротором с постоянным магнитом и тип с регулируемым магнитным сопротивлением, тип с ротором из мягкой стали.На рисунке 6.35 показаны основные элементы типа постоянного магнита с двумя парами полюсов статора.
Рисунок 6.35. Основные принципы работы шагового двигателя с постоянным магнитом (2-фазный) с шагом 90 °.
Каждый полюс двигателя с постоянными магнитами активируется током, проходящим через соответствующую обмотку возбуждения, причем катушки устроены так, что противоположные полюса образуются на противоположных катушках. Ток подается от постоянного тока. источник к обмоткам через переключатели. С токами, коммутируемыми через катушки таким образом, чтобы полюса были такими, как показано на рисунке 6.35, ротор переместится в линию со следующей парой полюсов и остановится там. Для рисунка 6.35 это будет угол 45 °. Если затем переключить ток так, чтобы полярность поменялась, ротор переместится на шаг, чтобы выровняться со следующей парой полюсов под углом 135 °, и остановится на этом. Полярности, связанные с каждым шагом:
| Шаг | Полюс 1 | Полюс 2 | Полюс 3 | Полюс 4 | ||
|---|---|---|---|---|---|---|
| 1 | Север | Юг | Юг | Юг | Юг | Юг 904 |
| 2 | Юг | Север | Юг | Север | ||
| 3 | Юг | Север | Север | Южный | ||
| 4 | Юг | |||||
| 4 | Юг | |||||
| 4 | ЮгЮг | Южный | ||||
| 5 | Повторение шагов 1–4 | |||||
Таким образом, в этом случае есть четыре возможных положения ротора: 45 °, 135 °, 225 ° и 315 °.
На рис. 6.36 показана основная форма шагового двигателя с переменным сопротивлением типа . В этой форме ротор сделан из мягкой стали и не является постоянным магнитом. Ротор имеет несколько зубцов, меньшее, чем количество полюсов статора. Когда противоположная пара обмоток на полюсах статора коммутирует ток, создается магнитное поле с силовыми линиями, которые проходят от полюсов статора через ближайший набор зубцов на роторе. Поскольку силовые линии можно рассматривать скорее как эластичную нить, которая всегда пытается укоротиться, ротор будет двигаться до тех пор, пока зубья ротора и полюса статора не совпадут.Это называется положением минимального сопротивления. Таким образом, переключая ток на последовательные пары полюсов статора, ротор можно заставить пошагово вращаться. При количестве полюсов и зубцов ротора, показанном на рис. 6.36, угол между каждым последующим шагом будет 30 °. Угол можно уменьшить, увеличив количество зубцов на роторе.
Рисунок 6.36. Основные принципы работы трехфазного шагового двигателя с переменным сопротивлением.
Существует еще одна версия шагового двигателя — гибридный шаговый двигатель .Он сочетает в себе особенности двигателей с постоянным магнитом и электродвигателя с переменным сопротивлением. У них есть ротор с постоянным магнитом, заключенный в железные колпачки, нарезанные на зубья. Ротор устанавливается в положение с минимальным сопротивлением в ответ на включение пары катушек статора.
Ниже приведены некоторые из терминов, обычно используемых при описании шаговых двигателей:
- 1.
Фаза
Это количество независимых обмоток на статоре, например.грамм. четырехфазный мотор. Требуемый ток для каждой фазы, ее сопротивление и индуктивность будут указаны таким образом, чтобы был указан коммутационный выход контроллера. На рис. 6.35 показан пример двухфазного двигателя, такие двигатели, как правило, используются в легких приложениях. Рисунок 6.36 представляет собой пример трехфазного двигателя. Четырехфазные двигатели обычно используются для приложений с более высокой мощностью.
- 2.
Угол шага
Это угол, на который ротор поворачивается за одно переключение для катушек статора.
- 3.
Удерживающий момент
Это максимальный крутящий момент, который может быть приложен к двигателю с приводом, не перемещая его из исходного положения и вызывая вращение шпинделя.
- 4.
Момент втягивания
Это максимальный крутящий момент, с которым двигатель запускается при заданной частоте импульсов и достигает синхронизма без потери шага.
- 5.
Момент отрыва
Это максимальный крутящий момент, который может быть приложен к двигателю, работающему с заданной частотой шагов, без потери синхронизма.
- 6.
Скорость втягивания
Это максимальная частота переключения или скорость, с которой нагруженный двигатель может запускаться без потери шага.
- 7.
Скорость отрыва
Это частота переключения или скорость, при которой нагруженный двигатель будет оставаться в синхронном состоянии при уменьшении скорости переключения.
- 8.
Диапазон поворота
Это диапазон скоростей переключения между втягиванием и отрывом, в котором двигатель работает синхронно, но не может запускаться или реверсировать.
На рисунке 6.37 показаны общие характеристики шагового двигателя.
Рисунок 6.37. Характеристики шагового двигателя.
Шаговый двигатель с переменным сопротивлением не содержит магнита, что помогает сделать его более дешевым и легким, а также более быстрым ускорением. Однако отсутствие магнита означает, что когда на него не подается питание, ничто не удерживает ротор в фиксированном положении. Двигатель с постоянными магнитами обычно имеет больший угол шага, 7,5 ° или 15 °, чем двигатель с регулируемым магнитным сопротивлением.Гибридный двигатель обычно имеет 200 зубцов ротора и вращается с шагом 1,8 °. Они обладают высоким статическим и динамическим крутящим моментом и могут работать с очень высокой частотой шагов. Как следствие, они очень широко используются.
Для приведения в действие шагового двигателя, чтобы он действовал шаг за шагом для обеспечения вращения, требуется, чтобы каждая пара катушек статора включалась и выключалась в требуемой последовательности, когда вход представляет собой последовательность импульсов (рисунок 6.38). Имеются схемы драйверов, обеспечивающие правильную последовательность и рисунок 6.39 показан пример SAA1027 для четырехфазного униполярного шагового двигателя. Двигатели называются однополярными, , если они подключены таким образом, что ток может течь только в одном направлении через любой конкретный вывод двигателя, биполярный , если ток может течь в любом направлении через любой конкретный вывод двигателя. Шаговый двигатель будет вращаться на один шаг каждый раз, когда вход триггера переходит с низкого на высокий. Двигатель вращается по часовой стрелке при низком входном вращении и против часовой стрелки при высоком.Когда установленный вывод становится низким, выход сбрасывается. В системе управления эти входные импульсы могут подаваться микропроцессором.
Рисунок 6.38. Вход и выход для системы привода шагового двигателя.
Рисунок 6.39. Схема драйвера SAA1027 для 4-фазного шагового двигателя 12 В.
Некоторые приложения требуют очень малых углов шага. Хотя угол шага можно сделать небольшим за счет увеличения количества зубцов ротора и / или количества фаз, обычно более четырех фаз и 50–100 зубцов не используются.Вместо этого используется метод, известный как мини-шаг , при котором каждый шаг делится на ряд подшагов равного размера с использованием разных токов в катушках, так что ротор перемещается в промежуточные положения между нормальными положениями шага. Например, этот метод можно использовать для разделения шага 1,8 ° на 10 равных шагов.
В разделе 4.4.2 показано применение шагового двигателя для управления положением инструмента. Данные производителя для шагового двигателя включают: 12 В, 4-фазный, униполярный, угол шага 7.5 °, подходящий драйвер SAA1027.
Пример
Для привода каретки принтера через систему ремня и шкивов (рис. 6.40) должен использоваться шаговый двигатель. Ремень должен перемещать массу в 500 г, которая должна набирать скорость 0,2 м / с за время 0,1 с. Трение в системе означает, что для перемещения каретки требуется постоянное усилие в 2 Н. Шкивы имеют эффективный диаметр 40 мм. Определите требуемый момент втягивания.
Рисунок 6.40. Пример.
Сила F , необходимая для ускорения массы, составляет
F = ma = 0,500 × (0,2 / 0,1) = 1,0 Н.
Общая сила, которую необходимо преодолеть, складывается из вышеуказанной силы и силы трения. Таким образом, общая сила, которую необходимо преодолеть, составляет 1,0 + 2 = 3 Н.
Эта сила действует в радиусе 0,020 м, поэтому крутящий момент, который необходимо преодолеть для запуска, то есть крутящий момент втягивания, составляет
крутящий момент = сила × радиус = 3 × 0,020 = 0,06 Нм
Двигатели с постоянными магнитами — приложения с магнитами
Магниты для двигателей с постоянными магнитамиBunting предлагает клиентам широкий выбор двигателей с постоянными магнитами (двигателей с постоянными магнитами) для различных применений.Очень многие вещи, необходимые в нашей жизни — наши автомобили, бытовая техника и промышленное оборудование, на которое мы полагаемся, чтобы вести современный образ жизни, — зависят от двигателей как их ключевых компонентов. Bunting помогает нашим клиентам создавать лучшие двигатели для своих приложений. Наша команда опытных инженеров работает с клиентами от начала проекта до его завершения.
Используйте мощность двигателей с постоянными магнитами — специальное магнитное приложение от BuntingНаиболее распространенным типом двигателей с постоянными магнитами являются бесщеточные электродвигатели постоянного тока (BLDC), в которых используются постоянные магниты, а не обмотка, для создания поля которой требуется электрический ток.Поскольку для поля ротора не требуется электрический ток, результатом является значительная экономия энергии и повышение эффективности по сравнению с асинхронными двигателями. Двигатели с постоянными магнитами имеют множество общих преимуществ, в том числе:
- Устойчивое магнитное поле: Двигатели с постоянными магнитами создают постоянное постоянное магнитное поле по сравнению со стандартными синхронными двигателями.
- Экологичность: двигатели с постоянными магнитами обеспечивают высокую эффективность, безмасляную работу без выбросов.Они позволяют избежать использования менее экологически чистого оборудования, такого как генераторы ископаемого топлива. Количество энергии, необходимое для создания этих двигателей, незначительно по сравнению с тем, сколько электромагнитной энергии они способны в конечном итоге произвести. Двигатели с постоянными магнитами находятся на переднем крае непрерывного развития приложений зеленой энергии.
- Размер: Постоянные магниты легкие и компактные, что означает, что они требуют меньше места для установки при сохранении высокой мощности.
- Крутящий момент: По сравнению со стандартными синхронными двигателями, двигатели с постоянными магнитами демонстрируют значительное улучшение крутящего момента.
- Температура: двигатели с постоянными магнитами обычно работают при более низких температурах по сравнению с другими двигателями, но обеспечивают улучшенный привод и производительность.
- Инвестиции: двигатели с постоянными магнитами надежны, долговечны и доступны по цене.
- Применения: Автомобильные вспомогательные двигатели, робототехника, автоматизация производства, кондиционеры, компьютерные дисководы, нагнетатели, бытовые приборы и т. Д.
с постоянными магнитами используются все типы постоянных магнитов, и компания Bunting предлагает обширную цепочку поставок всех магнитных материалов. Мы будем работать, чтобы определить, какой материал лучше всего подходит для вашего применения, и наш набор доступных материалов включает алнико, феррит, самарий, кобальт и, конечно же, неодим. Наша команда инженеров разработает и изготовит магниты на заказ из материала, который лучше всего подходит для ВАШЕГО уникального применения.
Чего можно ожидать от овсянки:
• 2D и 3D магнитное моделирование вашей конструкции
• Быстрое прототипирование конструкций
• Возможность производства магнитов и магнитных узлов в любом количестве
• Обширные проверки качества продукта
• Своевременная доставка
В компании Bunting мы разрабатываем магниты на заказ в соответствии с вашими потребностями. Мы объединяем изобретательность, глубокий опыт и специализированный ассортимент оборудования, чтобы предоставить вам именно тот продукт, который вам нужен, не жертвуя качественным дизайном и разработкой.
Поговорите с одним из наших экспертов по магнитам сегодня. Свяжитесь с нами здесь.
Обзор мирового рынка двигателей с постоянными магнитами на 2020-2025 годы:
Дублин, 29 декабря 2020 г. (GLOBE NEWSWIRE) — Отчет «Рынок двигателей с постоянными магнитами — рост, тенденции и прогнозы (2020–2025 гг.)» Был добавлен в предложение ResearchAndMarkets.com .
Рынок двигателей с постоянными магнитами в 2019 году оценивался в 33,97 млрд долларов США и, как ожидается, к 2025 году достигнет 57,79 млрд долларов США при среднегодовом темпе роста 9.46% в прогнозный период (2020-2025 гг.).
Двигатель с постоянными магнитами (PMM) пользуется значительным увеличением спроса из-за его высокой эффективности и производительности. Эти двигатели охватывают широкий спектр применений, от шаговых двигателей для наручных часов и промышленных приводов для станков до больших синхронных двигателей с постоянными магнитами для движения судов.
- Синхронный двигатель с постоянными магнитами имеет высокое отношение крутящего момента к току, высокую удельную мощность, высокий КПД и надежность.Таким образом, эти двигатели находят применение в новейших приводах переменного тока с регулируемой скоростью, особенно в электромобилях. Это во многом способствовало повышению внимания к автомобильному сектору.
- Ожидается, что электромобили будут стимулировать рост исследуемого рынка в течение прогнозируемого периода. Количество новых электромобилей, зарегистрированных во всем мире, в 2019 году достигло беспрецедентной доли рынка, и развитые рынки поддерживают эту тенденцию. Поскольку ведущие автомобильные компании все чаще используют двигатели с постоянными магнитами в электромобилях, ожидается, что мировой спрос будет расти, что будет способствовать дальнейшему росту рынка в течение прогнозируемого периода.
- Неодимовый магнит занял самую большую долю рынка в 2019 году, и ожидается, что он станет самым быстрорастущим сегментом магнитных материалов в течение прогнозируемого периода. Продукт с высокой энергией и высокая остаточная магнитная индукция неодима делают его обязательным выбором в качестве материала для промышленного применения. Неодим предлагает варианты как с высоким, так и с низким качеством, что позволяет ему обеспечивать превосходные характеристики и крутящий момент по сравнению с обычным двигателем, тем самым увеличивая его распространение. Однако высокие цены и дефицит, вероятно, создадут проблемы для роста этого материала.
- Ожидается, что растущий спрос на оборудование HVAC также повлияет на исследуемый рынок. Это в основном обусловлено увеличением числа новых домохозяйств, ростом средних расходов на строительство, быстрой урбанизацией и ростом располагаемого дохода в нескольких крупных странах. Растущие стандарты минимальной энергоэффективности бытовых приборов и оборудования также стимулируют рост PMM в оборудовании HVAC.
- Вспышка COVID-19 вынудила несколько отраслей приостановить почти все промышленные операции во всем мире.Поскольку сырье закупается из Китая, на поставку влияют тарифы Соединенных Штатов. Кроме того, в условиях пандемии COVID-19 рынок PMM, который широко применяется в различных отраслях (например, в производственном секторе) и получает широкое распространение в промышленности, вероятно, будет затронут.
Ключевые тенденции рынка
Значительная доля принадлежит электродвигателям постоянного тока
- Двигатели постоянного тока пользуются популярностью в отрасли с тех пор, как в отрасли начали переходить с асинхронных двигателей.Двигатели постоянного тока обладают рядом преимуществ, таких как простота эксплуатации, компактный размер и возможность работать без дополнительного управления.
- Двигатели с постоянным постоянным током очень эффективны, они могут обеспечивать значительную мощность и крутящий момент в крошечном форм-факторе. Кроме того, их можно легко подключить к батареям, поскольку они широко используются в различных приложениях. Их компактный размер и совместимость с батареями открывают возможности для многих новых приложений и отраслей, таких как дроны, рекуперативное торможение, электроинструменты и т. Д.
- Кроме того, главное преимущество пользователей заключается в том, что они могут легко управлять одним продуктом, который может быть настроен для управления различными типами двигателей с различными режимами работы и методами управления. Ожидается, что такие инициативы будут способствовать распространению постоянных двигателей постоянного тока среди пользователей.
- Двигатели с постоянным током постоянного тока находят различное применение в автомобильных компонентах, в том числе в окнах и вентиляторах, используемых в системах переменного тока и обогревателях, в дисках и приводах персональных компьютеров, а также в маломощном оборудовании, таком как игрушки и маленькие роботы.
Ключевые темы:
1 ВВЕДЕНИЕ
2 МЕТОДОЛОГИЯ ИССЛЕДОВАНИЯ
3 КРАТКОЕ ОПИСАНИЕ
87
4 Обзор рынка 4.3 Анализ цепочки создания стоимости в отрасли
4.4 Оценка воздействия COVID-19 на рынок двигателей с постоянным магнитом
4.5 Обзор технологий
5 ДИНАМИКА РЫНКА
5.1 Движущие силы рынка
5.1.1 Повышение КПД двигателя за счет постоянного магнита
5.1.2 Рост спроса на электромобили
5.1.3 Рост спроса на двигатели с постоянным магнитом (PMM) в промышленном секторе
5.2 Проблемы рынка
5.2.1 Уменьшение доступности редкоземельных металлов
5.3 Рыночные возможности
6 СЕГМЕНТАЦИЯ РЫНКА
6.1 По типу двигателя
6.2 По типу магнитного материала
6.3 По конечному пользователю Вертикально
6.4 География
7 ДОЛЯ НА РЫНКЕ ПРОДАВЦА
ЛАНДШАФТ
- Siemens AG
- Rockwell Automation
- ABB Limited
- Franklin Electric Company Inc.
- Allied Motion Technologies Inc.
- Toshiba Corporation
- Ametek Inc.
- Johnson Electric Holdings Ltd
- Autotrol Corporation
- Robert Bosch GmbH
- Danaher Corporation
- Bonfiglioli Riduttori SpA
- Aerotech Corporation
- Crouzet Automatis
- Buhler Motors GmbH
- Nider Corporation
9 ИНВЕСТИЦИОННЫЙ АНАЛИЗ
10 БУДУЩЕЕ РЫНКА
Для получения дополнительной информации об этом отчете посетите https: // www.