Регулировка оборотов асинхронного двигателя
Асинхронные двигатели используются в станках и прочем оборудовании, как электроприводы, для приведения в действие движущихся частей. Их широкое применение обусловлено простой конструкцией и сравнительно небольшой стоимостью. В этих условиях важное значение имеет регулировка оборотов асинхронного двигателя, позволяющая работать в самых разных условиях. Стандартные схемы предусматривают механические системы передач, которые не очень удобны при определенных обстоятельствах. Электрическое управление дает ряд преимуществ, несмотря на все сложности, связанные с подключением.
Способы регулировки
Электрическая регулировка скорости позволяет точно и плавно настраивать необходимые рабочие режимы. Эта операция может производиться сразу несколькими способами, связанными с изменениями параметров двигателя и электрического тока.

Прежде всего, может изменяться напряжение, подаваемое на статор, а также вспомогательное сопротивление роторной цепи. Кроме того, скорость вращения связана с изменением количества пар полюсов и частотой тока.
При последних двух способах, изменение скорости вращения происходит без существенного снижения мощности и потерь коэффициента полезного действия. Все они имеют свои достоинства и недостатки, но, в целом, успешно используются для регулировки. Эти способы считаются наиболее подходящими для асинхронных двигателей с конструкцией короткозамкнутого ротора. Именно эти двигатели чаще всего используются в производственной сфере.
Особенности частотного регулирования
Чаще всего применяется частотное регулирование, которое производится с помощью полупроводниковых преобразователей. Их действие основано на особенностях асинхронных двигателей. Здесь магнитное поле вращается с частотой, связанной с частотой, которая имеется у напряжения электрической сети.

Для того, чтобы работа двигателя была эффективной, одновременно с частотой, необходимо изменять и напряжение. Изменение значения напряжения находится в тесной связи с моментом нагрузки. При постоянной нагрузке, напряжение будет изменяться в пропорции с показателем частоты.
С помощью современных приборов, регулировка оборотов асинхронного двигателя может производиться в самом широком диапазоне. При необходимости, можно применять ускорение или замедление агрегатов, в зависимости от тех или иных технологических операций. Для задания нужных параметров используются специальные модули управления. Силовыми переключателями служат специальные транзисторы повышенной мощности. При высокой частоте переключения искажения тока получаются наиболее минимальными.
Как определить обороты электродвигателя по обмотке
Частотник для однофазного электродвигателя, принцип действия
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
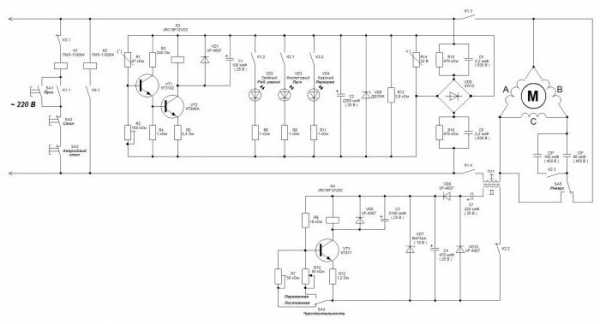
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.

Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
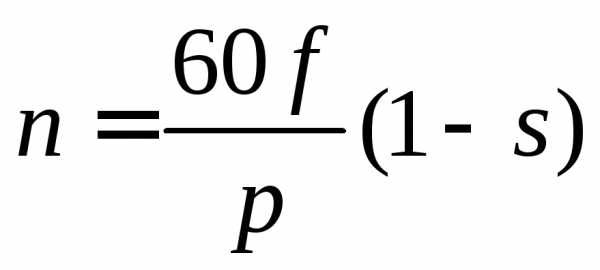
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
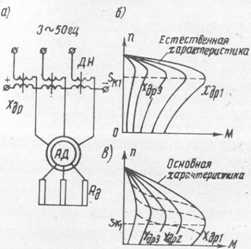
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
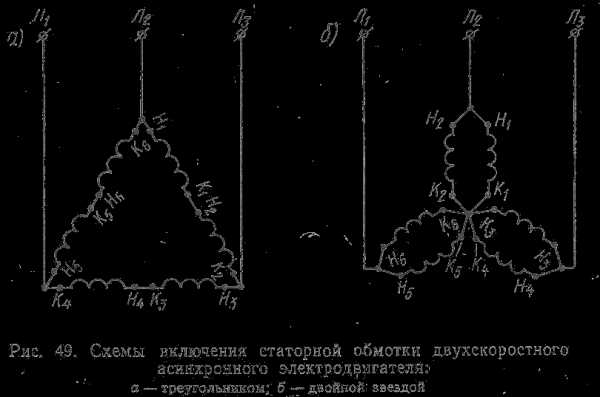
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
chistotnik.ru
Регулятор скорости вращения асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Регулятор скорости вращения асинхронного электродвигателя.
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Вопросы, как всегда в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
www.radiokot.ru
Регулировка оборотов электродвигателя | Полезные советы и рекомендации
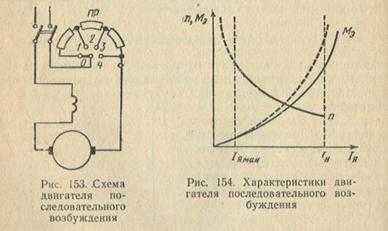
С проблемой регулировки оборотов электродвигателя приходится сталкиваться довольно часто: это работа с различными электроинструментами, приводами швейных машинок, прочими электроприборами на производстве и в быту. Регулировать обороты с помощью понижения питающего напряжения зачастую не имеет смысла: резко уменьшаются обороты двигателя, он теряет мощность и останавливается. Поэтому оптимальным вариантом для регулирования числа оборотов двигателя является изменение напряжения с применением обратной связи по току нагрузки.
В большинстве случаев в электроинструментах и прочем оборудовании применяются универсальные коллекторные электродвигатели с последовательным возбуждением. Они одинаково хорошо работают как от переменного, так и от постоянного тока. Особенность работы коллекторного электродвигателя заключается в том, что во время коммутации обмоток якоря при размыкании на ламелях коллектора возникают импульсы противо-ЭДС самоиндукции. По амплитуде они равны питающим импульсам, но по фазе – противоположны им. Угол смещения противо-ЭДС зависит как от внешних характеристик двигателя, так и от нагрузки и прочих факторов.
Вредное влияние противо-ЭДС приводит к искрению на коллекторе, а также потере мощности двигателя и дополнительному нагреву его обмоток. Некоторая часть противо-ЭДС гасится с помощью конденсаторов, шунтирующих щеточный узел.
Давайте рассмотрим процессы, которые протекают в режиме регулирования с обратной связью, на примере универсальной схемы (см. рис. 1). Опорное напряжение, которое определяет скорость вращения электродвигателя, формируется резистивно-емкостной цепью Р12-КЗ-С2. При увеличении нагрузки скорость вращения падает, при этом снижается и его крутящий момент. При этом уменьшается и противо-ЭДС, возникающая в двигателе и приложенная между катодом и управляющим электродом тиристора VS1. Это приводит к изменению на управляющем электроде тиристора напряжения, которое увеличивается пропорционально тому, как уменьшается противо-ЭДС.
Дополнительное напряжение на управляющем электроде тиристора приводит к его включению при меньшем фазовом угле (угле отсечки) и подаче на двигатель большего тока, что таким образом компенсирует снижение скорости вращения при увеличении нагрузки. Это приводит к наличию на управляющем электроде тиристора баланса импульсного напряжения, которое составлено из напряжения питания и напряжения самоиндукции двигателя.
При необходимости возможно перейти с помощью переключателя SA1 перейти на питание с помощью полного напряжения, без использования регулировки. Подбору тиристора по минимальному току включения необходимо уделить особое внимание, так это позволит обеспечить лучшую стабилизацию скорости вращения двигателя.
Вторая схема включения (см. рис.2) рассчитана на работу с более мощными двигателями, которые используются в шлифовальных машинах, деревообрабатывающих станках и дрелях. Принцип регулирования в ней остается прежним. Тиристор в этой схеме необходимо установить на радиатор с площадью не менее 25 кв.см.
При необходимости получения очень малых скоростей вращения или при применении для маломощных двигателей можно применять схему с использованием ИМС (см. рис. 3). Она питается от постоянного тока напряжением 12В. В случае питания от более высокого напряжения необходимо применить параметрический стабилизатор с напряжением стабилизации не выше 15В.
Регулировка скорости осуществляется с помощью изменения среднего значения напряжения импульсов, которые подаются на двигатель. С помощью таких импульсов возможно эффективно регулировать очень малые скорости вращения, так как они как бы “подталкивают” ротор двигателя. При повышении скорости вращения двигатель работает обычным образом.

Довольно несложная схема (см. рис. 4) предназначена для использования на линии игрушечной железной дороги. Она позволит избежать аварийных ситуаций и предоставит новые возможности при управлении составами. Лампа накаливания, находящаяся во внешней цепи, предохраняет и служит для сигнализирования о коротком замыкании на линии, ограничивая при этом выходной ток.
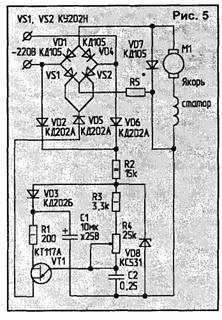
При необходимости регулирования оборотов двигателей с наличием на валу большого крутящего момента (например, в электролебедке) может пригодиться двухполупериодная мостовая схема, приведенная на рис. 5. Существенным отличием ее от предыдущих схем, где работает только одна полуволна питающего напряжения, является обеспечение полной мощности на двигателе.
Гасящий резистор R2 и диоды VD2 и VD6 используются для подачи питания на схему запуска. Задержка открывания тиристоров по фазе обеспечивается с помощью заряда конденсатора C1 через резисторы R3 и R4 от источника напряжения, уровень которого зависит от стабилитрона VD8. После заряда конденсатора C1 до порога срабатывания однопереходного транзистора VT1, последний открывается и запускает тот тиристор, на аноде которого имеется положительное напряжение. После разряда конденсатора однопереходный транзистор выключается. Номинал резистора R5 определяется желаемой глубиной обратной связи и типом двигателя. Для расчета его величины используется формула:
где Iм — эффективное значение максимального тока нагрузки для данного типа двигателя.
Предложенные схемы легко повторяются, но требуют произвести подбор некоторых элементов в зависимости от характеристик применяемого электродвигателя (к сожалению, практически невозможно найти электродвигатели, идентичные по всем параметрам, даже в пределах одной серии).
www.polezno.com
Регулирование скорости асинхронного электродвигателя путем изменения частоты питающей сети
Наиболее экономичным способом регулирования скорости вращения асинхронных электрических машин с короткозамкнутым ротором является изменение частоты питающего напряжения последних. При изменении частоты также будут меняться и параметры асинхронной машины. Для обеспечения необходимых значений пускового и критического моментов, а также коэффициента мощности и коэффициента полезного действия КПД, необходимо с изменением частоты соответствующим образом изменять и напряжение, подводимое к зажимам электродвигателя.
Общие закономерности регулирования скорости асинхронных машин путем изменения частоты питающей сети были исследованы академиком М.П. Костенко еще в 1925 году.
Основное соотношение, связывающее изменение частоты и напряжения, в зависимости от характера статического момента механизма может быть выведено из общих соотношений, представляемых эквивалентной схемой замещения. При постоянной частоте питающей сети критический момент асинхронного электродвигателя будет равен:
Где: m1 – количество фаз в обмотке статора; r1 и x1 – активное и индуктивное сопротивление статорной обмотки; х2/ — индуктивное сопротивление роторной обмотки, приведенной к первичной обмотке; f – частота питающей сети.
Если пренебречь активным сопротивлением статорной обмотки, выражение (1) примет вид:
Индуктивные сопротивления x1 и х2/ зависят от частоты питающей сети. Поэтому при переменной частоте предыдущее выражение должно быть записано как:
Для сохранения неизменной перегрузочной способности машины отношение критических моментов при любых скоростях должно быть равно отношению соответствующих статических моментов:
Где Мс1 и Мс2 – статические моменты, соответствующие скорости электрической машины при частотах f1 и f2; U1 и U2 – напряжения, подводимые к двигателю при тех же частотах.
Полученная формула (4) показывает, что оптимальный закон изменения напряжения при частотном регулировании определяется характером изменения статического момента в зависимости от частоты. В таблице ниже сопоставлены значения моментов, мощностей и напряжений при различных характерах зависимости статического момента от скорости.

Анализ, проведенный академиком М.П. Костенко на базе упрощенной круговой диаграммы, показал, что при соблюдении условия (4) будет иметь место постоянство cosφ, а КПД электрической машины будет функцией частоты и не зависит от нагрузки. Для всех видов зависимости момента от скорости: Мс ≡ 1/f, Мс = const, Mc ≡ f и Mc ≡ f2. КПД двигателя при каждой заданной скорости будет примерно одинаков.
Для выявления поведения асинхронного электродвигателя при регулировании частоты питающего напряжения в случаях различной зависимости статического момента от скорости необходимо установить характер изменения пускового и критического моментов.
В основу рассмотрения легла эквивалентная схема асинхронной машины с намагничивающим контуром, вынесенным на зажимы машины. Влияние насыщения не учитывается. За исходные данные принимаем параметры машины при номинальном напряжении и частоте fном = 50 Гц. В качестве независимой переменной (определяющего параметра) удобно принять частоту, выраженную в относительных единицах:
Напряжение, приложенное к зажимам электрической машины, будет функцией частоты и одновременно, будет зависеть от характера изменения статического момента, и в общем случае будет иметь вид:
Показатель степени α зависит от желаемого характера Мдв и функции скорости. При построении механической характеристики асинхронной машины при любой f можно использовать общее выражение:
Индуктивное сопротивление обмоток можно выразить при f = 50 Гц, а именно:
Где х1н и х2н/ — индуктивные сопротивления статора и ротора, приведенные к обмотке статора, при f = 50 Гц.
После введения относительных единиц выражение примет вид:
Где φ – частота в относительных единицах; α – коэффициент, определяемый характером зависимости момента от скорости электрической машины.
В (8) при переходе к относительным единицам U2 превращается в U2нφ2α, однако за счет f, входящей в выражение синхронной скорости ω0 = 2πfнφ, показатель степени у
φ становится 2α — 1.
Величина критического момента станет равна:
В случае пренебрежения активным сопротивлением статорной обмотки:
Выражение (10) может быть представлено как:
Где Мкн – критический момент электрической машины при номинальном напряжении и f.
Критическое скольжение при переменной частоте:
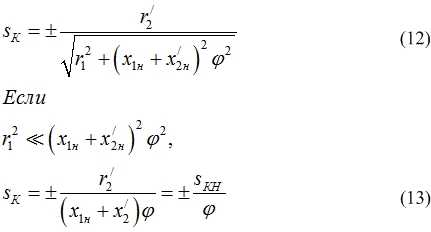
В ряде случаев удобно воспользоваться выражением механической характеристики, содержащим значение критического момента:
Если пренебречь сопротивлением активным обмотки статора уравнение механической характеристики примет вид:
Подставляя в упрощенное выражение механической характеристики значения Мк и sк без учета r1 получим расчетную формулу:
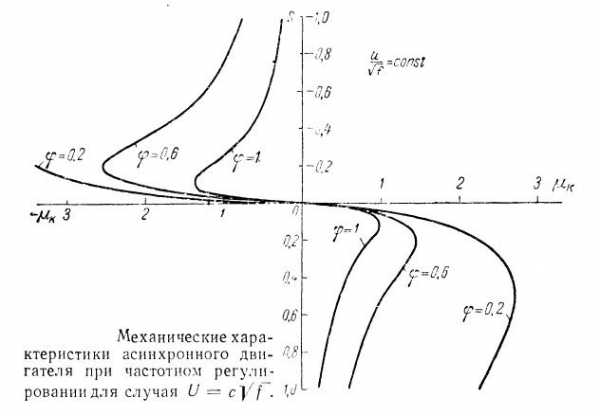
На рисунке ниже приведены механические характеристики асинхронного электродвигателя для трех различных частот в относительных единицах для случая изменения f по закону (U/f) = const или α = 1.
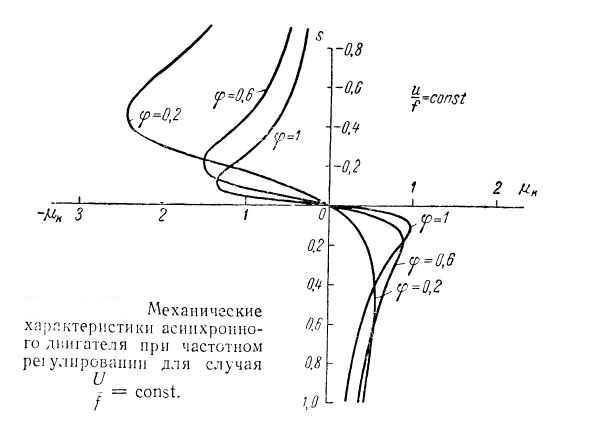
Сравнение характеристик показывает, что критическое скольжение возрастает с понижением частоты. Это связано с изменением соотношения активного и индуктивного сопротивления. При уменьшении f критический момент в двигательном режиме уменьшается. Выражение для пускового момента равно:
Пусковой момент при небольших изменениях частоты несколько увеличивается, а затем, при дальнейшем уменьшении f, достигает максимума, а дальше падает. Понижение М, наблюдаемое при низких f, вызывается относительным увеличением активного сопротивления, а также уменьшением магнитного потока, влияние которого не учитывают приведенные выше формулы. Уменьшение потока обуславливается падением напряжения в обмотке статора и является функцией нагрузки электродвигателя. Уменьшение магнитного потока может быть устранено с помощью увеличения отношения U/f при малых значениях частоты. Увеличение отношения U/f в размере, необходимом для поддержания номинального значения магнитного потока при нагрузке, приведет к тому, что при малых нагрузках машина окажется перевозбужденной и, следовательно, возрастет намагничивающий ток.
Механическая характеристика асинхронного двигателя для случая α = 1/2 , то есть при изменении напряжения по закону показаны ниже:
Регулирование скорости асинхронных короткозамкнутых машин в настоящее время применяется для самого широкого спектра рабочих механизмов. В высоко оборотистых электроприводах, где скорость вращения вала равна или превышает 3000 об/мин, применение коллекторных электромашин крайне нежелательно. Здесь больше подходит частотно-регулируемый асинхронный электропривод. Часто данный способ регулирования применяется при необходимости одновременного изменения скорости по одному закону нескольких рабочих органов машины, приводимых в движение отдельными электродвигателями. Примерами таких установок могут послужить электроприводы центрифуг вискозной промышленности, применяемые для получения вискозного волокна, рогулечных прядильных машин текстильной промышленности, роликовых транспортеров прокатных цехов металлургических заводов, служащих для транспортировки как горячего, так и холодного металла в процессе прокатки. Во всех перечисленных случаях каждый отдельный элемент рабочей машины (отдельная центрифуга, рогулька прядильной машины, ролик транспортера и так далее) приводятся в движение отдельным асинхронным двигателем мощностью от нескольких десятков ватт, до киловатт, и целая группа подобных двигателей может питаться от одного преобразователя с регулируемой частотой.
В качестве источника регулируемых асинхронных электродвигателей могут быть использованы следующие типы преобразователей частоты:
- Синхронный генератор, вращающийся с переменной частотой.
- Асинхронный преобразователь частоты.
- Преобразователь типа Леблана.
- Коллекторные генераторы переменного тока с возбуждением со статора.
- Полупроводниковые преобразователи частоты.
В таблице ниже представлены сопоставления технических показателей каждого типа перечисленных преобразователей:

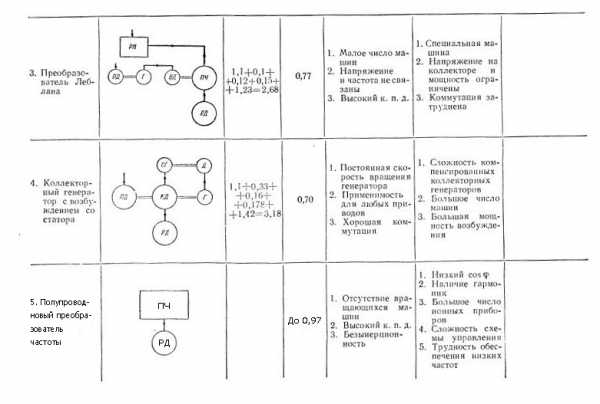
Таблица выше показывает, что все системы машинных преобразователей, за исключением преобразователя Леблана, состоят из значительного количества электрических машин и обладают невысоким общим коэффициентом полезного действия и высокой первоначальной стоимостью. Преобразователь частоты Леблана свободен от указанных недостатков, однако, несовершенство коммутации ограничило возможности его широкого использования в недалеком прошлом. Современная электроника вывела на первое место полупроводниковые преобразователи частоты равных которым пока нет, и которые используются практически во всех частотно-регулируемых электроприводах.
elenergi.ru
Способы регулирования скорости асинхронного двигателя

Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
- напряжения подаваемого на статор,
- вспомогательного сопротивления цепи ротора,
- числа пар полюсов,
- частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
- укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
- применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2 : 1 = р2 : pt , 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2 : 1 = Рг : Pi , 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
• Скачать схемы обмоток многоскоростных асинхронных двигателей
• Скачать лекцию «Регулирование частоты вращения асинхронных двигателей»
Свежие записи:
ukrlot.com
Электродвигатель с переменной скоростью вращения
Изобретение относится к области электротехники и может быть использовано для регулирования скорости вращения электродвигателей. Техническим результатом является уменьшение помех и ограничение размеров устройства регулирования. Электродвигатель с переменной скоростью вращения содержит статор, с которым соединена по меньшей мере одна катушка магнитного возбуждения, и ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности. Указанная катушка предназначена для формирования на указанном статоре по меньшей мере двух магнитоиндукционных полюсов противоположной полярности. Кроме того, двигатель содержит регулирующее устройство, предназначенное для регулировки скорости вращения ротора и включающее противопомеховый фильтр. 5 з.п. ф-лы, 3 ил.
Настоящее изобретение относится к электродвигателю, снабженному устройством для регулировки скорости вращения. В частности, настоящее изобретение относится к электродвигателю, имеющему устройство для регулировки скорости вращения, соединенное с индукционной катушкой самого двигателя.
Известно, что регулировку скорости вращения электродвигателей и мощности переменного напряжения обычно производят с использованием двух основных систем.
Первая система предусматривает прерывание синусоидального переменного тока, подаваемого в индукционные катушки двигателя, с использованием симисторных или тринисторных переключающих элементов, где длительностью открытого состояния управляют, разрешая прохождение только части синусоиды. Хотя эта система эффективна, когда необходима непрерывность управления, она вносит значительную по величине гармонику вследствие резкого прерывания тока.
Вторая известная система, обычно называемая «чоппером» (импульсным прерывателем), осуществляет регулировку путем преобразования отрицательной полуволны переменного тока, подаваемого в индукционную катушку двигателя, в положительную. Указанная полуволна при этом «рассекается» или «прерывается» с помощью высокочастотного сигнала переключения, например, с частотой приблизительно 20 кГц, и подается в двигатель, которым необходимо управлять (управление происходит, например, с использованием МОП-транзистора или биполярного транзистора с изолированным затвором). Регулируя коэффициент заполнения импульсной последовательности, управляют током в индукционной катушке и, следовательно, также скоростью вращения двигателя.
Несмотря на то, что вторая система создает меньше гармонических искажений, чем первая система, и позволяет уменьшить потери в обмотках, в ней необходимо применение фильтра для подавления ультразвуковой частоты переключения. Фактически, для обеспечения соответствия современным нормам и стандартам все переключающие цепи должны содержать противопомеховые фильтры. В первой системе противопомеховый фильтр также необходим для ограничения вышеупомянутой гармоники, обусловленной наличием симисторного переключателя, в токе, подаваемом в индукционные катушки двигателя. Известно, что для этой цели между системой регулировки любого из двух типов и электродвигателем последовательно включают индуктивность, состоящую из медной обмотки, намотанной на ферритовый сердечник. Кроме того, параллельно переключающему устройству включают RC-схему (резистор-конденсатор). Использование указанной индуктивности противопомехового фильтра требует пространства значительных размеров для размещения ферритового сердечника. К тому же эффективность индуктивности пропорциональна импедансу, создаваемому для переменного тока, и поэтому пропорциональна указанным размерам. В частности, чем больше габариты индуктивности, тем выше эффективность противопомехового фильтра.
Цель изобретения состояла в уменьшении помех, создаваемых устройствами регулировки скорости вращения двигателя, простым и экономичным способом, при ограничении размеров такого устройства, располагаемого внутри самого двигателя. Для достижения указанной цели был создан двигатель, снабженный устройством для регулировки скорости вращения двигателя, в котором часть по меньшей мере одной индукционной катушки двигателя используется в качестве индуктивности противопомехового фильтра для ограничения помех, обусловленных переключением регулирующего устройства. В частности, указанная индукционная катушка двигателя может быть разделена на две последовательные части, предпочтительно одинаковые, а регулирующее устройство может быть включено между этими двумя частями.
Один из аспектов настоящего изобретения касается двигателя с переменной скоростью вращения, содержащего статор, связанный по меньшей мере с одной катушкой магнитного возбуждения, и ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности, причем указанная по меньшей мере одна катушка выполнена так, чтобы сформировать на указанном статоре по меньшей мере два магнитоиндукционных полюса противоположной полярности. Регулирующее устройство для регулировки скорости вращения ротора содержит противопомеховый фильтр, который включает в себя по меньшей мере часть указанной магнитоиндукционной катушки.
Характеристики и преимущества конструкции, выполненной согласно настоящему изобретению, станут понятнее из последующего описания, в котором приведены примеры одного из вариантов выполнения изобретения, которым оно не ограничивается, со ссылками на сопровождающие чертежи, где:
на фиг.1 схематично представлен электродвигатель, выполненный согласно настоящему изобретению, в целом;
на фиг.2 схематично представлено регулирующее устройство, установленное в электродвигателе, выполненном согласно настоящему изобретению;
на фиг.3 представлена возможная электрическая схема регулирующего устройства согласно настоящему изобретению.
Как показано на чертежах, согласно предпочтительному варианту выполнения изобретения двигатель содержит статор 2, снабженный по меньшей мере одной магнитоиндукционной катушкой 3а и 3b, и ротор 4.
Указанная по меньшей мере одна индукционная катушка предназначена для создания на указанном статоре по меньшей мере двух магнитных полюсов противоположной полярности. Указанный ротор также имеет по меньшей мере два магнитных полюса противоположной полярности. Указанные полюсы ротора могут быть созданы одним из способов, применяемых в данной области техники, например, с использованием по меньшей мере одного постоянного магнита, прикрепленного к указанному ротору, или с использованием по меньшей мере одной катушки, возбуждаемой электрическим током, который подается в ротор через скользящие контакты, например, с помощью щеток или с использованием витков самоиндукции, что типично для асинхронных двигателей.
Указанный двигатель содержит устройство 5 для регулировки скорости вращения, соединенное с указанной по меньшей мере одной индукционной катушкой.
На фиг.2 поясняется вариант выполнения настоящего изобретения, в котором регулирующее устройство 5 соединено с индукционной катушкой двигателя, питание которой осуществляется переменным током, подаваемым на клеммы 6 и 7. Согласно настоящему изобретению указанная катушка разделена на первую часть 3a и вторую часть 3b, соединяемые последовательно. Предпочтительно, чтобы эти первая и вторая части были идентичны.
Регулирующее устройство 5 включено последовательно между первой частью 3а и второй частью 3b, так что через него течет такой же ток I.
Таким образом, регулирующее устройство 5 как с одной, так и с другой стороны защищено по меньшей мере одной частью индукционной катушки 3а и 3b, которые действуют как индуктивности противопомехового фильтра, предназначенные для значительного ограничения помех, создаваемых в процессе переключения, и для уменьшения механических вибраций, связанных с внезапными выбросами вращающего момента в двигателях, в отношении скорости вращения, источников шума и нежелательных резонансов.
Следовательно, согласно настоящему изобретению, по меньшей мере одна часть индукционной катушки заменяет собой индуктивность фильтра, выполненного в виде обмотки на ферритовом стержне, который в настоящее время используется в данной области техники.
На фиг.3 показана электрическая схема регулирующего устройства согласно настоящему изобретению, которая включает управляющую схему 51, формирующую управляющий сигнал для указанных индукционных катушек и включенную параллельно противопомеховому фильтру 52.
Указанная управляющая схема имеет известную конструкцию и содержит симистор Т1 и двунаправленный диодный тиристор D1, блок 511 переменного сопротивления (резистор R2 и включенные параллельно друг другу потенциометры Р1 и Р2) и RC-блок 521 (резистор R3 и конденсатор С2).
RC-блок 521 и блок 511 переменного сопротивления определяют время отпирания симистора Т1, когда после интервала времени, зависящего от постоянной времени заряда конденсатора С2, оказывается превышенным напряжение включения диодного тиристора D1.
Электрическая мощность, которая проходит через симистор и подается в индукционные катушки, определяет скорость вращения двигателя. Эта мощность увеличивается с уменьшением постоянной времени заряда конденсатора С2. Поэтому при изменении постоянной времени заряда этого конденсатора скорость вращения двигателя также изменяется. Для изменения указанной постоянной времени предназначены потенциометры Р1 и Р2.
Противопомеховый фильтр 52 состоит из RC-схемы (резистор R1 и конденсатор С1, соединенные последовательно). Согласно настоящему изобретению противопомеховый фильтр включает также часть индукционной катушки 3a и/или 3b. Известно, что индуктивность L для переменного тока представляет импеданс Z=2nπfL, где f — частота переменного тока. Поэтому на высокой частоте индукционная катушка имеет высокий импеданс. RC-схема ведет себя противоположным образом, поскольку на высокой частоте конденсатор ведет себя как короткозамкнутая цепь.
Управляющая схема вносит высокочастотные гармоники вследствие переключений симистора, что создает токи, значительно влияющие на правильную работу двигателя. Двигатель, в котором, помимо прочего, имеется рассматриваемая фильтрующая система, блокирует эти токи, в противном случае поступающие в источник питания. Было обнаружено, что эта фильтрующая система дополнительно способствует уменьшению шума пульсаций механического вращающего момента, а также снижает электромагнитные помехи в асинхронных двигателях с обмотками со сдвигом фаз, поскольку регулировку можно проводить только для одной части.
Хотя данный вариант выполнения изобретения относится к управляющей схеме с запиранием фазы, аналогичные соображения касаются управляющих схем, в которых используются «чопперные» системы. Фактически, высокая частота сигнала переключения в «чопперной» управляющей схеме требует использования противопомехового фильтра, подобного описанному в настоящем изобретении.
Кроме того, размещение регулирующего устройства между двумя частями индукционной катушки обеспечивает наличие двух фильтрующих катушек: одной — до управляющей схемы, а другой — после нее, что повышает суммарный импеданс для высокочастотных токов помех.
Настоящее изобретение позволяет исключить традиционную индуктивность фильтра, что обеспечивает значительное уменьшение стоимости и объема ручных операций при изготовлении двигателя, а также сокращение пространства, занимаемого печатной платой, и позволяет использовать переключающие элементы (такие как симистор, тринистор, транзистор, МОП-транзистор или транзистор с изолированным затвором) меньшей мощности, поскольку они включаются внутри электрического соединения последовательно с обмотками двигателя и работают при более низком напряжении, нежели напряжение источника питания.
Кроме того, поскольку традиционная индуктивность фильтра представляет собой компонент, который занимает большую часть пространства в устройстве для регулировки скорости, ее исключение приводит к созданию намного более компактных и малогабаритных двигателей по сравнению с двигателями, в которых индуктивность фильтра намотана на ферритовом сердечнике.
1. Электродвигатель с переменной скоростью вращения, содержащий статор (2), соединенный по меньшей мере с одной индукционной катушкой, ротор, на котором сформированы по меньшей мере два магнитных полюса противоположной полярности, причем указанная по меньшей мере одна индукционная катушка выполнена так, чтобы сформировать на указанном статоре по меньшей мере два магнитоиндукционных полюса противоположной полярности, противопомеховый фильтр и регулирующее устройство для регулирования скорости вращения указанного ротора, которое соединено с индукционной катушкой и включает управляющую схему, формирующую управляющий сигнал для указанной индукционной катушки и включенную параллельно противопомеховому фильтру, который включает по меньшей мере часть указанной индукционной катушки.
2. Электродвигатель по п.1, в котором индукционная катушка разделена на первую часть (3а) и вторую часть (3b), соединенные последовательно, а указанное регулирующее устройство (5) включено между указанной первой частью и указанной второй частью.
3. Электродвигатель по п.2, в котором указанные первая и вторая части идентичны.
4. Электродвигатель по п.1, в котором указанный противопомеховый фильтр (52) включает RC-схему.
5. Электродвигатель по п.1, в котором указанное регулирующее устройство включает управляющую схему с запиранием фазы.
6. Электродвигатель по п.1, в котором указанное регулирующее устройство включает «чопперную» управляющую схему.
findpatent.ru