Электродвигатели и электромоторы
| Мощность / Обороты | 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин |
|---|---|---|---|---|
| 0,12 кВт | — | АИР56А4 | — | — |
| 0,18 кВт | АИР56А2 | АИР56В4 | АИР63А6 | — |
| 0,25 кВт | АИР56В2 | АИР63А4 | АИР63В6 | АИР71В8 |
| 0,37 кВт | АИР63А2 | АИР63В4 | АИР71А6 | АИР80А8 |
| 0,55 кВт | АИР63В2 | АИР71А4 | АИР71В6 | АИР80В8 |
| 0,75 кВт | АИР71А2 | АИР71В4 | АИР80А6 | АИР90LA8 |
| 1,1 кВт | АИР71В2 | АИР80А4 | АИР80В6 | АИР90LB8 |
| АИР80А2 | АИР80В4 | АИР90L6 | АИР100L8 | |
| 2,2 кВт | АИР80В2 | АИР90L4 | АИР100L6 | АИР112МА8 |
| 3 кВт | АИР90L2 | АИР100S4 | АИР112МА6 | АИР112МВ8 |
| 4 кВт | АИР100S2 | АИР100L4 | АИР112МВ6 | АИР132S8 |
| 5,5 кВт | АИР100L2 | АИР112М4 | АИР132S6 | АИР132М8 |
| 7,5 кВт | АИР112М2 | АИР132S4 | АИР132М6 | АИР160S8 |
| 11 кВт | АИР132М2 | АИР132М4 | АИР160S6 | АИР160М8 |
| 15 кВт | АИР160S2 | АИР160S4 | АИР160М6 | АИР180М8 |
| 18,5 кВт | АИР160М2 | АИР160М4 | АИР180М6 | АИР200М8 |
| 22 кВт | АИР180S2 | АИР180S4 | АИР200М6 | АИР200L8 |
| 30 кВт | АИР180М2 | АИР180М4 | АИР200L6 | АИР225М8 |
| 37 кВт | АИР200М2 | АИР200М4 | АИР225М6 | АИР250S8 |
| 45 кВт | АИР200L2 | АИР200L4 | АИР250S6 | АИР250М8 |
| 55 кВт | АИР225М2 | АИР225М4 | АИР250М6 | АИР280S8 |
| 75 кВт | АИР250S2 | АИР250S4 | АИР280S6 | АИР280М8 |
| 90 кВт | АИР250М2 | АИР250М4 | АИР280М6 | АИР315S8 |
| 110 кВт | АИР280S2 | АИР280S4 | АИР315S6 | АИР315М8 |
| 132 кВт | АИР280М2 | АИР280М4 | АИР315М6 | АИР355S8 |
| 160 кВт | АИР315S2 | АИР315S4 | АИР355S6 | АИР355М8 |
| 200 кВт | АИР315М2 | АИР315М4 | АИР355М6 | АИР355МВ8 |
| 250 кВт | АИР355S2 | АИР355S4 | АИР355МВ6 | АИР355MLB8 |
| 315 кВт | АИР355М2 | АИР355М4 | АИР355MLC6 | АИР355MLC8 |
После выбора типа электродвигателя в зависимости от условий работы, сферы его использования, специфики механизма и так далее требуется определиться с важными рабочими характеристиками мотора.
Так, в первую очередь нужно обратить внимание на мощность, пусковой и номинальный моменты, номинальный ток и напряжение, тип режима работы, классом энергоэффективности и коэффициент мощности. Все эти параметры указаны в инструкции или описании электромотора.
Перед покупкой электромотора следует выбрать его тип. Так, есть электрический двигатель постоянного тока, синхронный электродвигатель и асинхронный электродвигатель.
Асинхронный электромотор
Асинхронные электромоторы разделяют на устройства с фазным и короткозамкнутым ротором. Преимущественно в быту встречаются вторые, поскольку они имеют весьма простую конструкцию, являются простыми в использовании и обслуживании, имеют высокую надежность работы и сравнительно низкую стоимость.
Недостатки данных моторов — большой ток запуска, сравнительно небольшой пусковой момент, высокая чувствительность к перепадам напряжения в сети, необходимость применять преобразователь частоты для плавной регулировки скорости вращения вала.
Применение асинхронного электродвигателя с фазным ротором дает возможность снизить ток запуска и увеличить пусковой момент. Применение таких моторов весьма ограничено, поскольку их конструкция весьма сложная, что ведет к увеличению их стоимости. Такие моторы используют в приводах различных механизмов с очень тяжелыми условиями запуска.
Там, где требуется ступенчатая регулировка скорости, к примеру, в лифтах, применяется многоскоростной асинхронный электродвигатель. Так, где необходимо делать остановки за указанное время и фиксировать вал при отключении сетевого напряжения, к примеру, лебедки, станки по металлу, используют асинхронный электродвигатель со специальным электромагнитным тормозом.
Также есть асинхронный электромотор с повышенным скольжением
, требуемый для эксплуатации в режимах с пульсирующей нагрузкой и повторно-кратковременных режимах.Синхронный электромоторПреимущество такого мотора — возможность работать с коэффициентом мощности cos φ = 1. Также в режиме перевозбуждения данный электродвигатель может отдавать реактивную мощность в электросеть, что ведет к увеличению ее коэффициента мощности, существенному уменьшению потери и падения сетевого напряжения. Стоит отметить. Что данный тип электромотора устойчив к перепадам напряжения.
Также в режиме перевозбуждения данный электродвигатель может отдавать реактивную мощность в электросеть, что ведет к увеличению ее коэффициента мощности, существенному уменьшению потери и падения сетевого напряжения. Стоит отметить. Что данный тип электромотора устойчив к перепадам напряжения.
Наибольший момент данного мотора пропорционален напряжению, двигателя асинхронного типа — квадрату напряжения. Так, при понижении напряжения данный электродвигатель сохранит способность выдерживать большие перегрузки, форсирование возбуждения существенно увеличивает эффективность использования мотора при понижении напряжения в сети.
Также КПД такого двигателя выше, чем асинхронного, поскольку он имеет большой воздушный зазор и постоянные магниты. Также вал такого мотора вращается с постоянной скоростью даже во время изменения момента нагрузки на имеющемся валу.
Недостатками синхронного электромотора считаются сложность конструкции, весьма высокая цена, наличие возбудителя и достаточно сложный запуск.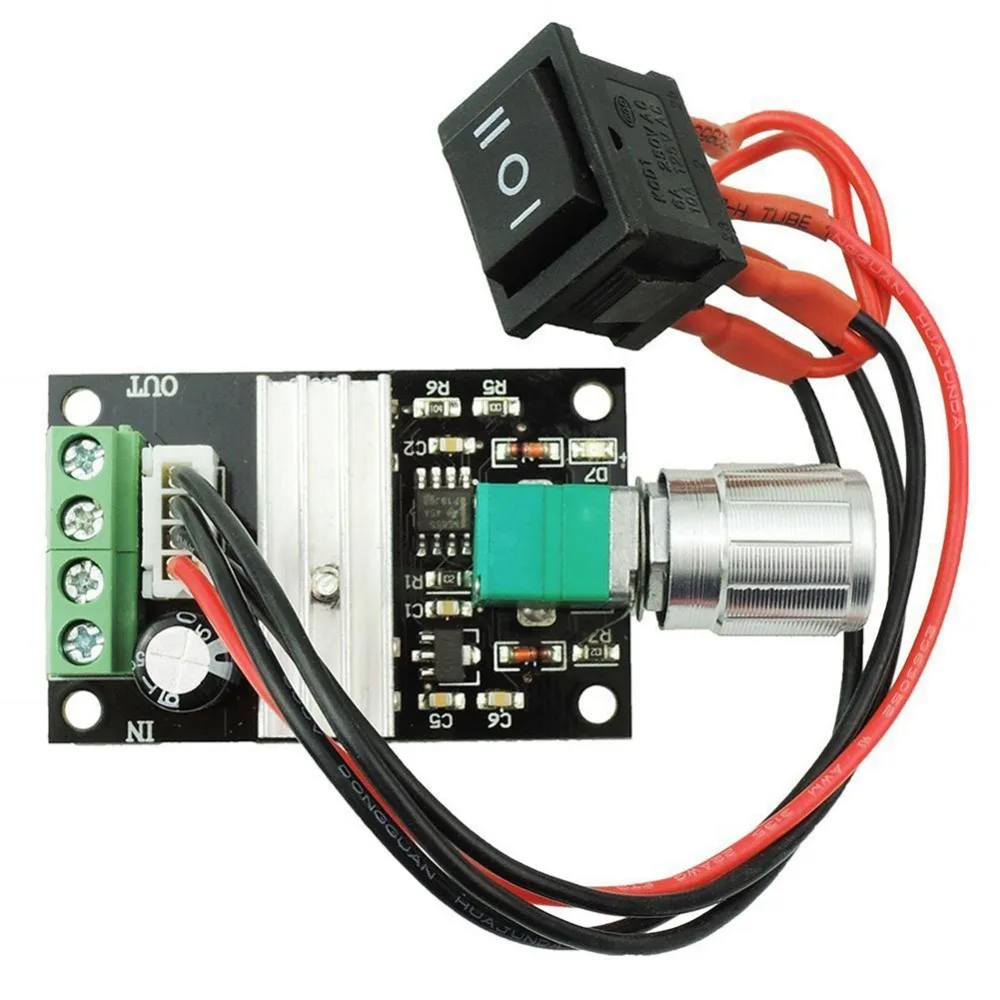 Так, синхронный электродвигатель применяют при мощностях более 100 кВт в различных компрессорах, насосах, вентиляторах и двигатель-генераторных устройствах.
Так, синхронный электродвигатель применяют при мощностях более 100 кВт в различных компрессорах, насосах, вентиляторах и двигатель-генераторных устройствах.
Регулятор вращения электродвигателя 220 вольт с обратной связью
Наконец, начали «доходить» руки до самодельного точильного станка. В наличии был универсальный коллекторный электродвигатель УВ 051-Ц. Скорость его 7000 об/мин, что в двое больше, чем нужно для электроточила. Вдобавок, хотелось иметь регулировку оборотов (желательно с обратной связью). Пришлось собирать схему, которая отвечала всем запросам.
Итак, как я пришел к тому, что скорость нужно снизить вдвое. На точильных камнях, обычно, есть надпись на какой максимальной скорости они могут работать. Чаще всего – это 25-30 м/с. Чтобы рассчитать необходимое количество оборотов электродвигателя для точильного станка – есть формула. Количество оборотов = (допустимые обороты на камне / диаметр точильного круга (в метрах) *3,14 )*60 секунд. Итого, максимальное количество оборотов электродвигателя для камня, который я приобрел = (25/0.15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.
Итого, максимальное количество оборотов электродвигателя для камня, который я приобрел = (25/0.15+3.14)*60, что приблизительно равно 3185 об/мин. Вывод: скорость 7000 об/мин электродвигателя УВ 051-Ц нужно снизить вдвое.
В результате поисков, наткнулся на простую схему регулятора оборотов коллекторного электродвигателя 220 вольт с обратной связью. Информации по ней было не много, т.к., возможно, мало кто ее собирал, сомневаясь в ее работоспособности, видя насколько она примитивна. Я же ее собрал на кусочке монтажной платы, произвел отладку, убедился в работоспособности.
Теперь пересказ принципа действия схемы регулятора оборотов коллекторного электродвигателя с обратной связью. R1+R2+C1 – формирует опорное напряжение, задающее скорость вращения двигателя. В момент приложения нагрузки, скорость вращения падает, снижается крутящий момент. Возникающая в двигателе и приложенная между управляющим контактом и катодом тиристора противо-ЭДС уменьшается. Пропорционально уменьшению противо-ЭДС увеличивается напряжение на управляющем контакте тиристора. Такое увеличение напряжение заставляет тиристор срабатывать при меньшем фазовом угле, и в следствии, подавать на двигатель больший ток.
Такое увеличение напряжение заставляет тиристор срабатывать при меньшем фазовом угле, и в следствии, подавать на двигатель больший ток.
Тиристор нужно подбирать в зависимости от мощности электродвигателя. Мне хватило MCR100-8, в оригинальной схеме – КУ202Н. Под тиристор подбирается сопротивление резистора R3. Если тиристор КУ202Н – R3 можно не ставить. Диоды можно заменить на любые с аналогичными параметрами Д226, 1N4007 и т.д. С1 может быть в пределах 0,1-2uF, им устраняются рывки двигателя на малых оборотах. Конденсаторы с рабочим напряжением 250 вольт.
Электротехника: Регулятор оборотов электродвигателя.
Одним из наиболее эффективных способов управления частотой вращения вала электродвигателя является использование широтно импульсной модуляции (ШИМ) мощности передаваемой на этот двигатель. Создать простой и эффективный ШИМ регулятор можно на микросхеме-таймере NE555 (или LM555). Такой регулятор может управлять электронным ключом замыкающим источник напряжения на электродвигатель с частотой ШИМа, ключ может быть для переменного или для постоянного тока. Схема регулятора, без ключа, приведена на рисунке:
Такой регулятор может управлять электронным ключом замыкающим источник напряжения на электродвигатель с частотой ШИМа, ключ может быть для переменного или для постоянного тока. Схема регулятора, без ключа, приведена на рисунке:На выходе такого регулятора имеется импульсное напряжение (на выходе output относительно GND) когда он работает, частота этого напряжение не меняется а скважность можно регулировать крутя или перемещая ручку (или чего у него там есть) потенциометра R3 (т.е. можно делать импульс длиннее или короче при этом не меняя время через которое появляется фронт следующего импульса (начало следующего импульса)). Ниже приведены схемы для регулировки оборотов электродвигателей.
Схема регулятора оборотов электродвигателя переменного тока приведена на рисунке:
Рисунок 3 — Регулятор оборотов электродвигателя переменного тока
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке:
Рисунок 4 — Регулятор оборотов электродвигателя постоянного тока
Некоторые подробности можно увидеть на видео:
Если сопротивление потенциометра будет больше то диапазон частот вращения вала двигателя тоже будет больше но также будет меньше частота ШИМа поэтому придётся уменьшить ёмкость конденсатора C1 т.к. если частота будет слишком низкой то возможно будет заметно «дёрганье двигателя» если частота будет слишком высокой то симисторный ключ не будет правильно открываться поэтому частота должна быть обязательно меньше 50Гц хотя бы в 10раз. Хорошо такой регулятор подходит для достаточно инерционных приборов например мощных электродвигателей, нагревателей, паяльников и т.д (регулировать обороты паяльника такой регулятор не будет но его температуру очень даже будет).
И на последок некоторое количество ссылок по которым можно приобрести детали:
50штук таймеров 555 можно закупить перейдя по ссылке http://ali.pub/v5x9t (за 85р. на момент написания данного описания). Опторонов 10шт. для переменного тока можно закупить по ссылке http://ali.pub/7gyq8
Опторонов 10шт. для переменного тока можно закупить по ссылке http://ali.pub/7gyq8Последнюю схему можно переделать для регулировки мощности какой либо другой нагрузки, например нагревателей:
Рисунок 5 — Регулировка мощности
КАРТА БЛОГА (содержание)Регулятор оборотов электродвигателя коллекторного типа на ШИМ
Для регулировки частоты вращения маломощных электродвигателей коллекторного типа обычно применяют резистор, который включают последовательно с двигателем. Но такой способ включения обеспечивает очень низкий КПД, а самое главное не позволяет осуществлять плавную регулировку оборотов (найти переменный резистор достаточной мощности на несколько десятков Ом совсем не просто). А самый главный недостаток такого способа, это то, что иногда происходит остановка ротора при снижении напряжения питания.
ШИМ-регуляторы, речь о которых пойдет в этой статье, позволяют осуществлять плавную регулировку оборотов без перечисленных выше недостатков. Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
Помимо этого ШИМ-регуляторы так же можно применять и для регулировки яркости ламп накаливания.
Рис.1.
На рис.1 приведена схема одного из таких ШИМ-регуляторов. Полевой транзистор VT1 является генератором пилообразного напряжения (с частотой повторения 150 Гц), а операционный усилитель на микросхеме DA1 работает как компаратор, формирующий ШИМ-сигнал на базе транзистора VT2. Частота вращения регулируется переменным резистором R5, изменяющим ширину импульсов. Благодаря тому, что их амплитуда равна напряжению питания, электродвигатель не будет «тормозить», а кроме этого можно добиться более медленного вращения, чем в обычном режиме.
Рис.2.
Схема ШИМ регуляторов на рис.2 аналогична предыдущей, но задающий генератор здесь выполнен на операционном усилителе (ОУ) DA1. Этот ОУ функционирует в роли генератора импульсов напряжения треугольной формы с частотой повторения 500 Гц. Переменный резистор R7 позволяет осуществлять плавную регулировку вращения.
Рис.3.
На рис.3. представлена весьма интересная схема регулятора. Этот ШИМ регулятор выполнен на интегральном таймере NE555. Задающий генератор имеет частоту повторения 500 Гц. Длительность импульсов, а, следовательно, и частоту вращения ротора электродвигателя можно регулировать в диапазоне от 2 до 98 % периода повторения. Выход генератора ШИМ регулятора на таймере NE555 подключен к усилителю тока, выполненному на транзисторе VT1 и собственно управляет электродвигателем М1.
Главным недостатком схем рассмотренных выше является отсутствие элементов стабилизации частоты вращения вала при изменении нагрузки. А вот следующая схема, показанная на рис.4., поможет решить эту проблему.
Рис.4.
Данный ШИМ регулятор как и большинство аналогичных устройств, имеет задающий генератор импульсов напряжения треугольной формы (частота повторения 2 кГц), выполненный на DA1.1.DA1.2, компаратор на DA1.3, электронный ключ на транзисторе VT1, а также регулятор скважности импульсов, а по сути частоты вращения электродвигателя — R6. Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Особенностью схемы является наличие положительной обратной связи посредством резисторов R12, R11, диода VD1,конденсатора C2, и DA1.4, которая обеспечивает постоянную частоты вращения вала электродвигателя при изменении нагрузки. При подключении ШИМ регулятора к конкретному электродвигателю при помощи резистора R12 производится регулировка глубины ПОС, при которой не возникает автоколебаний частоты вращения при увеличении или уменьшении нагрузки на вал двигателя.
Элементная база. В приведенных в статье схемах можно использовать следующие аналоги деталей: транзистор КТ117А можно заменить на КТ117Б-Г или как вариант на 2N2646; КТ817Б — КТ815, КТ805; микросхему К140УД7 на К140УД6, или КР544УД1, ТL071, TL081; таймер NE555 на С555, или КР1006ВИ1; микросхему TL074 на TL064, или TL084, LM324. Если необходимо подключить к ШИМ-регулятору более мощную нагрузку ключевой транзистор КТ817 необходимо заменить более мощным полевым транзистором, как вариант, IRF3905 или подобным. Указанный транзистор способен пропускать токи до 50А.
Указанный транзистор способен пропускать токи до 50А.
Подготовлено по материалам статьи: А.В. Тимошенко, Радіоаматор №4, 2008г.
Двигатели с регулируемой скоростью— Двигатели с регулируемой скоростью
Инверторы Fuji Electric FRENIC-Mini (C2) / VFD
Новые удобные в использовании преобразователи FRENIC-Mini (C2) повышают производительность широкого спектра оборудования.
Для использования с трехфазными двигателями от 1/8 л.с. до 3 л.с.
Однофазный вход 115 или 230 В переменного тока, трехфазный вход 230 В переменного тока или трехфазный вход 460 В переменного тока.
Стандартные функции:
- Автонастройка / Повышение крутящего момента
- Гибкое дистанционное / локальное управление
- Векторное управление динамическим крутящим моментом
- Самый быстрый процессор в своем классе
- Сетевая совместимость
- Настройка КПД / Монтаж бок о бок
Трехфазные асинхронные двигатели переменного тока серии КМИС
Трехфазный двигатель серии KIIS предлагает оптимально спроектированный, высокоэффективный трехфазный двигатель следующего поколения, который включает в себя более прочные шестерни, как с параллельным валом, так и с новым типом с гипоидным прямым углом, что обеспечивает максимальную производительность двигателя. Серия KIIS доступна от 100 Вт (1/8 л.с.) до 200 Вт (1/4 л.с.) и оснащена предварительно смонтированной параллельной или гипоидной зубчатой передачей.
Серия KIIS доступна от 100 Вт (1/8 л.с.) до 200 Вт (1/4 л.с.) и оснащена предварительно смонтированной параллельной или гипоидной зубчатой передачей.
Высокая производительность
Характеристики были улучшены для создания высокопроизводительного двигателя с небольшим снижением скорости даже при большой нагрузке.
Безвентиляторный дизайн
Двигатель новой конструкции КМИС уменьшил тепловыделение.Благодаря более высокому КПД двигатель меньше нагревается, поэтому охлаждающий вентилятор на задней части двигателя больше не требуется. Без охлаждающего вентилятора пыль не разносится.
Асинхронные двигатели переменного тока с мотор-редукторами Brother
Эти мотор-редукторы переменного тока отличаются превосходным КПД по сравнению с гипоидными или косозубыми передачами, а также обеспечивают больший выходной крутящий момент, что позволяет использовать меньшие двигатели и большую экономию энергии.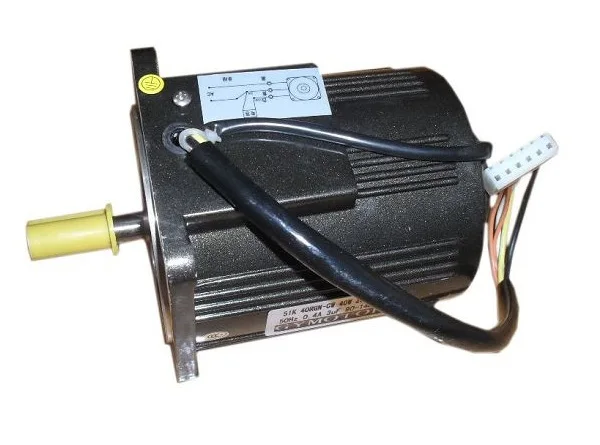
Шестерни в этих мотор-редукторах переменного тока отличаются высокой прочностью, не требуют обслуживания и могут быть установлены в любом направлении благодаря конструкции с кольцевым уплотнением с проскальзыванием. Доступны высокие передаточные числа, фланцевое крепление или крепление на лапах, под прямым углом или под прямым углом с полым валом.
СерияPremium Efficiency ie3
Новые мотор-редукторы IE3 с повышенным КПД дешевле в эксплуатации и демонстрируют явные преимущества при длительной работе (по сравнению с мотор-редукторами IE1 со стандартным КПД).
Высокоэффективные гипоидные / цилиндрические зубчатые передачи
По сравнению с обычно используемыми червячными передачами, высокоэффективные мотор-редукторы оснащены технологией гипоидного / косозубого зацепления, которая может поддерживать КПД выше 85% во всем широком диапазоне скоростей двигателя.
Редукторные двигатели переменного тока с промывкой IP67 серии FPW
Серия FPW — это асинхронные мотор-редукторы переменного тока с промывкой, идеально подходящие для применений, где на них попадает вода.Все мотор-редукторы переменного тока с промывкой серии FPW соответствуют стандарту IEC IP67 (признано UL). Каждый двигатель промывки и редуктор поставляются предварительно смонтированными с передаточным числом от 3: 1 до 180: 1.
Разработан и изготовлен с учетом водонепроницаемости и пыленепроницаемости
Улучшенные антикоррозионные свойства
Высокая коррозионная стойкость достигается за счет специального антикоррозионного покрытия и повторной проверки материала вала [нержавеющая сталь (тип SUS303)].
Соответствует основным стандартам безопасности и международным стандартам напряжения питания
Редукторный мотор-редуктор серии FPW признан UL и CSA и сертифицирован в соответствии с Китайской системой обязательной сертификации (система CCC). Маркировка CE используется в соответствии с Директивой по низковольтному оборудованию. Кроме того, наш широкий ассортимент продукции включает в себя те, которые соответствуют напряжениям источников питания основных стран Азии, Северной Америки и Европы.
Приводы с регулируемой скоростью— обзор
2.6 Приводы с регулируемой скоростью
Приводы с регулируемой скоростью (VSD), также называемые приводами с регулируемой скоростью (ASD), — это устройства, которые могут изменять скорость двигателя с фиксированной скоростью. В системах HVAC они используются в основном для управления вентиляторами в системах с переменным расходом воздуха вместо других устройств, таких как впускные лопатки и выпускные заслонки. Приводы с регулируемой скоростью более энергоэффективны, чем эти другие устройства (их главное преимущество), но они также снижают уровень шума при частичной нагрузке, позволяют вентиляторам работать с гораздо более низкими нагрузками, не вызывая скачков скорости вращения вентилятора (нестабильное состояние, которое может привести к сильной пульсации и, возможно, вызвать повреждение вентилятора), а также снизить износ механических компонентов, таких как ремни и подшипники.Приводы с регулируемой скоростью также используются для управления насосами в насосных системах с регулируемым расходом и для управления холодильными компрессорами в центробежных чиллерах.
Приводы с регулируемой скоростью более энергоэффективны, чем эти другие устройства (их главное преимущество), но они также снижают уровень шума при частичной нагрузке, позволяют вентиляторам работать с гораздо более низкими нагрузками, не вызывая скачков скорости вращения вентилятора (нестабильное состояние, которое может привести к сильной пульсации и, возможно, вызвать повреждение вентилятора), а также снизить износ механических компонентов, таких как ремни и подшипники.Приводы с регулируемой скоростью также используются для управления насосами в насосных системах с регулируемым расходом и для управления холодильными компрессорами в центробежных чиллерах.
Многие типы приводов с регулируемой скоростью использовались на протяжении многих лет, начиная с приводов постоянного тока, используемых в основном в промышленных приложениях, и до механических приводов с различным диаметром шкива. Одним из наиболее важных достижений последних лет стало развитие технологии частотно-регулируемых приводов (VFD). В этих приводах используется твердотельная электронная схема для регулировки частоты и напряжения питания двигателя, что, в свою очередь, изменяет скорость.
В этих приводах используется твердотельная электронная схема для регулировки частоты и напряжения питания двигателя, что, в свою очередь, изменяет скорость.
Чаще всего в системах отопления, вентиляции и кондиционирования воздуха используются инверторы, использующие технологию широтно-импульсной модуляции (ШИМ) с синусоидальной кодировкой. Схема ШИМ показана на Рис. 2-25 . ШИМ работает, сначала преобразуя входящую мощность переменного тока в постоянный ток с помощью выпрямителя на диодном мосту. Затем напряжение фильтруется, сглаживается и передается в секцию инвертирования ШИМ. Инвертор состоит из высокоскоростных биполярных транзисторов, которые регулируют как напряжение, так и частоту, подаваемые на двигатель.
Рисунок 2-25.Инверторный преобразователь частоты
Выходной сигнал, показанный на Рис. 2-26 , состоит из серии коротких импульсов напряжения. Выходное напряжение регулируется путем изменения ширины и количества импульсов напряжения, а выходная частота изменяется путем изменения длины цикла. Формируемый сигнал имеет необходимое напряжение и частоту для достижения желаемой скорости и крутящего момента двигателя, но он не такой гладкий, как входящий синусоидальный источник. По этой причине двигатели должны быть специально выбраны с соответствующей конструкцией и конструкцией, чтобы выдерживать менее плавный источник питания.
Формируемый сигнал имеет необходимое напряжение и частоту для достижения желаемой скорости и крутящего момента двигателя, но он не такой гладкий, как входящий синусоидальный источник. По этой причине двигатели должны быть специально выбраны с соответствующей конструкцией и конструкцией, чтобы выдерживать менее плавный источник питания.
Рисунок 2-26. Форма сигнала ШИМ с синусоидальной кодировкой
Помните ли вы ранее в этой главе, когда мы отмечали, что, когда мы измеряем напряжение и ток в чисто синусоидальной цепи переменного тока, мы измеряем среднеквадратичное значение? В большинстве ситуаций четкое определение среднеквадратичного значения не имеет значения, поскольку форма волны близка к синусоидальной. Как вы можете видеть на рис. 2-26 , форма волны не является синусоидальной. Стандартный измеритель может показывать существенно высокие или низкие значения в этой неволновой ситуации. С выходом VFD действительно важно, чтобы вы использовали измеритель, предназначенный для получения «истинных среднеквадратичных значений». Измерители продаются как измерители «истинного среднеквадратичного значения» и стоят дороже, чем те, которые нуждаются в истинном синусоидальном входе.
Измерители продаются как измерители «истинного среднеквадратичного значения» и стоят дороже, чем те, которые нуждаются в истинном синусоидальном входе.
Преобразователи частоты (VSD) заменяют пускатель. Они имеют как пусковую способность, так и встроенную защиту от перегрузки. Фактически, микропроцессорное управление в большинстве приводов обеспечивает дополнительную защиту от других неисправностей (таких как пониженное напряжение, повышенное напряжение, замыкание на землю, потеря фазы и т. Д.). Приводы с регулируемой скоростью также обеспечивают плавный пуск двигателя (если он запрограммирован), снижая пусковой ток и уменьшая износ ремней и шкивов.
Хотя пускатель не требуется при использовании частотно-регулируемого привода / частотно-регулируемого привода, его можно использовать в качестве резервного привода, чтобы двигатель мог работать на полной скорости в случае отказа привода. Схема подключения байпасного пускателя показана на рис. 2-27 . На заре преобразователей частоты и частотно-регулируемых приводов пускатели с байпасом считались почти обязательными, но теперь, когда надежность приводов повысилась, необходимость в пускателях с байпаса стала намного менее критичной. Если требуется байпас, иногда желательно использование нескольких приводов, питаемых от одного байпаса аналогичного размера, что снижает стоимость покупки нескольких байпасов.При использовании байпасного стартера важно учитывать, насколько хорошо система будет работать на полной скорости. Например, в приложении с вентилятором VAV работа вентилятора на полной скорости может вызвать очень высокое давление в воздуховоде при низкой скорости воздушного потока, потенциально повреждая систему воздуховодов. Некоторые новые преобразователи частоты имеют так называемые электронные байпасы, которые выбираются по скорости и не должны работать на полной скорости. (Эти электронные байпасы не являются независимыми; поэтому в них используются те же контакторы и перегрузки, что и в преобразователе частоты, поэтому они не являются полностью независимыми.) Должны быть предусмотрены другие средства для сброса давления воздуха или снижения скорости вентилятора. Эти сложности, наряду с дополнительными затратами, должны быть сопоставлены с потенциальной пользой байпасных пускателей.
Если требуется байпас, иногда желательно использование нескольких приводов, питаемых от одного байпаса аналогичного размера, что снижает стоимость покупки нескольких байпасов.При использовании байпасного стартера важно учитывать, насколько хорошо система будет работать на полной скорости. Например, в приложении с вентилятором VAV работа вентилятора на полной скорости может вызвать очень высокое давление в воздуховоде при низкой скорости воздушного потока, потенциально повреждая систему воздуховодов. Некоторые новые преобразователи частоты имеют так называемые электронные байпасы, которые выбираются по скорости и не должны работать на полной скорости. (Эти электронные байпасы не являются независимыми; поэтому в них используются те же контакторы и перегрузки, что и в преобразователе частоты, поэтому они не являются полностью независимыми.) Должны быть предусмотрены другие средства для сброса давления воздуха или снижения скорости вентилятора. Эти сложности, наряду с дополнительными затратами, должны быть сопоставлены с потенциальной пользой байпасных пускателей.
Рисунок 2-27. Привод с регулируемой скоростью и дополнительным стартером
Leeson — Двигатель вентилятора с регулируемой скоростью — 1/2, 3/4 и 1 л.с.
Эти универсальные двигатели с регулируемой скоростью вращения вентилятора могут использоваться в вентиляторах для коровников для крупного рогатого скота, свиней или птиц. Эти двигатели с прямым приводом имеют антикоррозионное покрытие для областей с высокой влажностью.
Характеристики / преимущества:
- Перманентный сплит
- Основание подушки
- Полностью закрытый воздух свыше
- Шариковые подшипники с двойным уплотнением
- Энергоэффективная конструкция дешевле в эксплуатации
- Бесшумная высокотемпературная смазка
- Коррозионно-стойкое покрытие для тяжелых условий эксплуатации
48-рамные двигатели имеют вал 1/2 «x 2 1/4»; Двигатели с 56 рамой имеют вал 5/8 «x 2 5/8».
| Номер для контроля качества | Модель № | HP | об / мин | Вал | Вольт | Рама | F. I. Ампер 230 В I. Ампер 230 В | Прибл. Вес (фунты) | Скорость |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 100803 | 1/4 | 1625 | 1/2 | 115/230 | 48Z | 1,6 | 19 | VS |
| 1 | 100824 | 1/4 | 1075 | 12 | 115/230 | 48Z | 1.5 | 22 | VS |
| 1 | 100804 | 1/3 | 1625 | 1/2 | 115/230 | 48Z | 1,9 | 22 | VS |
| 1 | 100767 | 1/3 | 1625 | 5/8 | 115/230 | 56 | 1.9 | 23 | VS |
| 1 | 100825 | 1/3 | 1075 | 1/2 | 115/230 | 48 | 1,8 | 24 | VS |
| 1 | 100806 | 1/3 | 1075 | 5/8 | 115/230 | 56 | 1. 8 8 | 27 | VS |
| 1 | 111323 | 1/2 | 1625 | 5/8 | 115/230 | 56 | 2,6 | 36 | VS |
| 1 | 101645 | 1/2 | 1075 | 1/2 | 115/230 | 48 | 3.0 | 33 | VS |
| 1 | 111321 | 1/2 | 1075 | 5/8 | 115/230 | 56 | 3,0 | 36 | VS |
| 1 | 111919 | 1/2 | 825 * | 5/8 | 115/230 | 56 | 3.2 | 45 | SS |
| 1 | 111322 | 3/4 | 1075 | 5/8 | 115/230 | 56 | 4,0 | 36 | SS |
| 1 | 111267 | 1 | 1625 | 5/8 | 115/230 | 56 | 4. 4 4 | 41 | VS |
| 260030 | Шнуры питания | ||||||||
все, что вам нужно знать о редукторах скорости — Блог CLR
Лифты, конвейерные ленты, фрезы и дрели, насосное оборудование … редукторы скорости применяются во многих случаях и повсеместно используются как в промышленности, так и в быту.
Также известный как ASD — приводы с регулируемой скоростью — это устройства или наборы устройств, которые используются для регулировки скорости вращения двигателя .
Хотя его можно применять и к другим типам вращающегося оборудования, в основном они используются в двигателях.
Что такое привод с регулируемой скоростью или привод с регулируемой скоростью?Возможно, вас заинтересует: Руководство по предотвращению раздражающих шумов и вибраций в редукторах скорости [Электронная книга]
Привод с регулируемой скоростью — это устройство, используемое в электромеханических приводах для управления скоростью и крутящим моментом двигателя переменного тока путем регулирования входной частоты и напряжения двигателя. Приводы с регулируемой скоростью могут быть электрическими, гидравлическими, механическими или даже электронными .
Приводы с регулируемой скоростью могут быть электрическими, гидравлическими, механическими или даже электронными .
Они точно и постоянно регулируют скорость, с которой двигатель работает . В противном случае машины, в которых используются эти механизмы и двигатели, будут работать в соответствии со своими характеристиками и энергоснабжением, что будет крайне неэффективно.
Приводы с регулируемой скоростью — это устройства, используемые в электромеханических приводах для управления скоростью вращения двигателя.
Помимо промышленного применения, редукторы скорости для электродвигателей также используются в кондиционерах , больших вентиляторах или промышленных наполнителях.
Многие существующие приводы с регулируемой скоростью работают с использованием двух устройств: электродвигателя и контроллера, который регулирует его скорость.
Это позволяет изменять скорость до тех пор, пока в каждый момент не будет достигаться лучшая, более эффективная скорость, в дополнение к непрерывному выполнению, , таким образом, может отказаться от необходимости в шаговом двигателе .
Регулятор скорости двигателя является важным компонентом безопасности, поскольку он контролирует максимальную скорость , которую двигатель может достичь в любой момент, предотвращая его превышение скорости, что может привести к повреждению двигателя, помимо того, что он неэффективен.
Какие типы редукторов переменной скорости бывают? Механические приводы с регулируемой скоростьюЕсли вы хотите узнать больше: Какие двигатели лучше всего подходят для высоких скоростей: шаговые двигатели или серводвигатели?
- Привод с регулируемым шагом . В этом типе привода с регулируемой скоростью используются ремни и шкивы .
Диаметр по крайней мере одного из них можно изменить, чтобы получить наиболее эффективное соотношение.
- Тяговый привод .
 В регуляторе скорости этого типа мощность передается через металлические ролики .
В регуляторе скорости этого типа мощность передается через металлические ролики .
В то же время при их перемещении изменяется передаточное отношение их пути контакта или входной и выходной скорости.
Электро-электронные приводы с регулируемой скоростью- Приводы с регулируемой частотой вращения или двигатели переменного тока (AC) с регулируемой скоростью. Они используются в синхронных двигателях, а также в асинхронных асинхронных двигателях с фазным ротором и короткозамкнутым ротором.
Для синхронных двигателей регулировка достигается путем регулировки частоты входной мощности двигателя.
- Электродвигатели постоянного тока с регулируемой скоростью . Эти типы приводов с регулируемой скоростью состоят из электродвигателя и контроллера.
Эти устройства могут управлять скоростью последовательных двигателей постоянного тока, двигателей с постоянными магнитами, параллельных двигателей и составных двигателей.
- Вихретоковые преобразователи частоты .Этот тип привода с регулируемой скоростью состоит из двигателя с фиксированной скоростью и вихретоковой муфты. Муфта состоит из двух роторов — ротора с фиксированной скоростью, добавленного к двигателю, и ротора с регулируемой скоростью.
Он работает через регулируемое включение катушки возбуждения , которая генерирует магнитное поле, которое передается на входной ротор, который, в свою очередь, передает его на выходной ротор.
Чем выше напряженность магнитного поля, тем выше скорость и крутящий момент, которые передаются.Тахометр переменного тока используется для контроля выходной скорости.
- Привод с регулируемой скоростью скольжения . Этот тип частотно-регулируемого привода в настоящее время имеет мало применений, так как он превзошел другие с точки зрения эффективности.
В настоящее время приводы с регулируемой скоростью скольжения могут использоваться для асинхронных двигателей с фазным ротором.
- Гидродинамический привод . Гидродинамический привод, также известный как с регулируемой скоростью, , , гидравлическая муфта , передает крутящий момент на выходной ротор от входного привода с использованием гидравлического масла.
Входной привод должен быть на валу с постоянной скоростью, а выходной ротор должен работать на валу с регулируемой скоростью.
- Гидростатический привод . Гидростатический привод позволяет регулировать скорость с помощью регулирующего клапана. Он состоит из гидравлического двигателя и гидравлического насоса , оба из которых имеют объемный объем.
Он имеет заданное соотношение между каждым оборотом двигателя или насоса и расходом жидкости, используемым в любой данный момент.
Другой способ регулировки оборотов в этом устройстве — это изменение рабочего объема двигателя или насоса.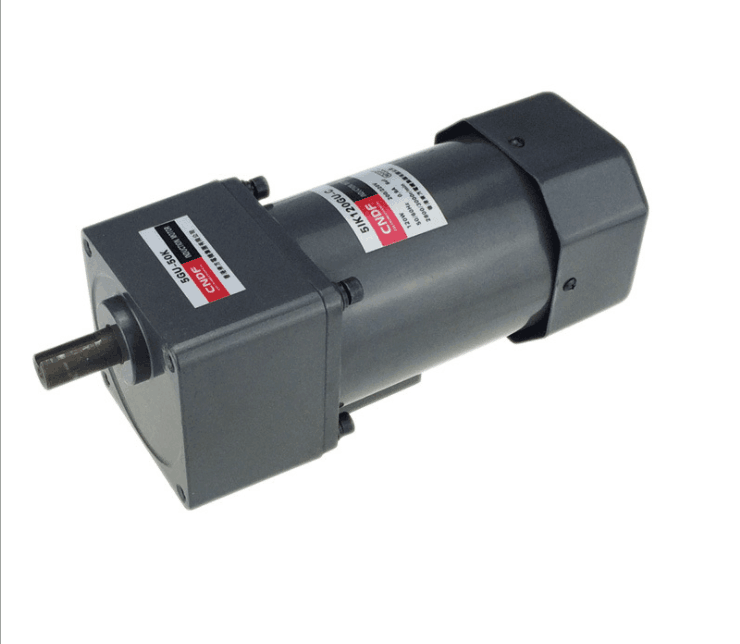
- Гидровязкостной привод . В этих приводах с регулируемой скоростью используются входные и выходные диски , разделенные масляным слоем.
Они сопрягаются, и крутящий момент передается через масляный слой.
Таким образом, передаваемый результирующий крутящий момент известен и предсказуем, поскольку он пропорционально реагирует на давление, оказываемое гидроцилиндром на диски.
Использование мотор-редукторов в различных типах машин оправдано широким спектром преимуществ, которые они предлагают:
- Регулирование скорости работы двигателя продлевает срок его службы , потому что он предотвращает грубые операции, которые в конечном итоге могут привести к серьезным повреждениям.
- Приводы с регулируемой скоростью и редукторы для электродвигателей позволяют использовать электродвигатели с высокой эффективностью ; скорость вывода регулируется в каждый момент.

- Кроме того, производительность является оптимальной с точки зрения потребления энергии , поскольку на каждом этапе можно использовать разную скорость вместо поддержания постоянной скорости и всегда работать с плавной регулировкой числа оборотов.
- Регулировка крутящего момента для экономии энергии .
- Редукторный двигатель также упрощает выполнение тестов и регулировок, уменьшая обороты для этой цели.
В автомобильном секторе мотор-редукторы очень полезны в отношении безопасности при смещении нагрузки или при работе без нагрузки.Это связано с тем, что они могут предотвратить впрыск чрезмерного количества топлива в цилиндры двигателя, так что обороты остаются в пределах постоянных переменных вместо того, чтобы испытывать резкие изменения.
В CLR у нас есть команда инженеров, которые являются экспертами, которые помогают и оптимизируют ваши проекты, связанные с автомобильной промышленностью или любыми другими. Свяжитесь с нами, и мы поможем воплотить в жизнь ваш инженерный проект.
Свяжитесь с нами, и мы поможем воплотить в жизнь ваш инженерный проект.
Недорогой двигатель с регулируемой скоростью для бытовых систем отопления, вентиляции и кондиционирования воздуха
Недорогой электродвигатель с регулируемой частотой вращения повышает энергоэффективность
В 2011 году компания U.S. промышленный, коммерческий и жилой секторы потребляли ~ 13,5 квадрата электроэнергии, из которых примерно 7,8 квадрата (58%) потреблялись приложениями, использующими электродвигатели в оборудовании; технологическое охлаждение; и охлаждение, отопление, вентиляция и кондиционирование воздуха. Поскольку затраты на электроэнергию продолжают расти, важной задачей является снижение потребления электроэнергии асинхронными двигателями с использованием передовых технологий управления мощностью, таких как привод с регулируемой скоростью. Поскольку существующие двигатели с регулируемой скоростью стоят как минимум в четыре раза дороже односкоростных двигателей, в настоящее время они используются только в 5% бытовых систем отопления, вентиляции и кондиционирования воздуха.
Компания DynaMotors Inc. при помощи гранта Программы изобретений и инноваций Министерства энергетики США разработала революционную недорогую бесщеточную технологию двигателя с регулируемой скоростью, которая имеет твердотельные переключатели на вращающемся якоре. Эти переключатели имеют оптическое управление, что позволяет контролировать крутящий момент и скорость двигателя. Предполагаемым рынком были бытовые системы HVAC, но эту технологию также можно использовать в электромобилях, самолетах и автоматизации производства. В существующих системах отопления, вентиляции и кондиционирования воздуха используются недорогие, малоэффективные односкоростные асинхронные двигатели с постоянными разделенными конденсаторами.Эти двигатели включаются и выключаются в соответствии с требованиями термостата. Двигатель с регулируемой скоростью, непрерывно работающий на половинной скорости, использует 25% мощности для перемещения того же количества воздуха. Чтобы добиться широкого распространения на рынке систем отопления, вентиляции и кондиционирования воздуха в жилых помещениях, технология должна быть конкурентоспособной по стоимости с устаревшим оборудованием. Компания DynaMotors решила эту проблему и продает свою технологию на 40-50% дешевле, чем существующие двигатели с регулируемой скоростью. В настоящее время приводной двигатель с регулируемой скоростью Dynamotors находится на заключительной стадии сертификации лаборатории андеррайтеров.Более дешевая версия продукта, Comfortune ™, была представлена для конкуренции на рынке систем отопления, вентиляции и кондиционирования воздуха в жилых помещениях. Динамотор применяется для других промышленных и коммерческих нишевых рынков, таких как противопожарное оборудование.
Компания DynaMotors решила эту проблему и продает свою технологию на 40-50% дешевле, чем существующие двигатели с регулируемой скоростью. В настоящее время приводной двигатель с регулируемой скоростью Dynamotors находится на заключительной стадии сертификации лаборатории андеррайтеров.Более дешевая версия продукта, Comfortune ™, была представлена для конкуренции на рынке систем отопления, вентиляции и кондиционирования воздуха в жилых помещениях. Динамотор применяется для других промышленных и коммерческих нишевых рынков, таких как противопожарное оборудование.
Испытания электродвигателей и частотно-регулируемых приводов
Основные принципы повышения эффективности Энергия — одна из самых высоких статей затрат на заводе или предприятии, и двигатели часто потребляют львиную долю энергии предприятия, поэтому обеспечение оптимальной работы двигателей жизненно важно.Точные измерения мощности могут помочь снизить потребление энергии, поскольку измерение всегда является первым шагом к повышению производительности, а также может помочь продлить срок службы двигателя. Небольшие смещения или другие проблемы часто невидимы невооруженным глазом, а малейшее колебание вала может отрицательно сказаться на производительности и качестве и даже сократить срок службы двигателя.
Небольшие смещения или другие проблемы часто невидимы невооруженным глазом, а малейшее колебание вала может отрицательно сказаться на производительности и качестве и даже сократить срок службы двигателя.
В этом документе мы обсудим основы измерения переменного, постоянного тока и мощности, а также четырехэтапный процесс проведения точных измерений электрической и механической мощности на различных двигателях и системах частотно-регулируемых приводов (VFD).Мы также покажем, как эти измерения используются для расчета энергоэффективности двигателей и приводных систем.
Электродвигатели — это электромеханические машины, которые преобразуют электрическую энергию в механическую, как показано на рисунке 1. Несмотря на различия в размерах и типах, все электродвигатели работают во многом одинаково: электрический ток, протекающий через катушку с проволокой в магнитном поле, создает сила, которая вращает катушку, создавая крутящий момент.
Понимание выработки электроэнергии, потерь мощности и различных типов измеряемой мощности может быть пугающим. Ниже приведен обзор основных измерений электрической и механической мощности. Для получения более подробной информации об основных измерениях электрической мощности мы рекомендуем прочитать «Основы измерения мощности».
Рисунок 1. Двигатель преобразует электрическую энергию в механическую.
Что такое мощность? В самом простом виде мощность — это работа, выполняемая в течение определенного периода времени.В двигателе мощность передается на нагрузку путем преобразования электрической энергии в соответствии со следующими законами науки.
В электрических системах напряжение — это сила, необходимая для перемещения электронов. Ток — это скорость потока заряда в секунду через материал, к которому приложено определенное напряжение. Умножив напряжение на соответствующий ток, можно определить мощность.
Ватт (Вт) — единица мощности, определяемая как один джоуль в секунду. Определение мощности в ваттах для источника переменного тока должно включать коэффициент мощности (PF), поэтому W = V x A x PF для систем переменного тока.
Коэффициент мощности — это безразмерное соотношение в диапазоне от -1 до 1 и представляет собой количество реальной мощности, выполняемой при работе с нагрузкой. Для фактов мощности меньше единицы, что почти всегда имеет место, будут потери в реальной мощности. Это связано с тем, что напряжение и ток цепи переменного тока имеют синусоидальную природу, при этом амплитуда тока и напряжения цепи переменного тока постоянно смещается и обычно не идеально совмещена.
Поскольку мощность равна напряжению, умноженному на ток, мощность является максимальной, когда напряжение и ток выстраиваются вместе, так что пики и нулевые точки на формах волны напряжения и тока возникают одновременно.Это типично для простой резистивной нагрузки. В этой ситуации две формы сигналов находятся «в фазе» друг с другом, а коэффициент мощности будет равен 1. Это редкий случай, поскольку почти все нагрузки не просто обладают идеальным сопротивлением.
Это редкий случай, поскольку почти все нагрузки не просто обладают идеальным сопротивлением.
Говорят, что два сигнала не совпадают по фазе или сдвинуты по фазе, если два сигнала не коррелируют от точки к точке. Это может быть вызвано индуктивными или нелинейными нагрузками. В этой ситуации коэффициент мощности будет меньше 1, и реальная мощность будет меньше.
Из-за возможных колебаний тока и напряжения в цепях переменного тока мощность измеряется несколькими способами. Реальная или истинная мощность — это фактическая мощность, используемая в цепи, и измеряется в ваттах. В цифровых анализаторах мощности используются методы оцифровки сигналов входящего напряжения и тока для расчета истинной мощности.
В этом примере мгновенное напряжение умножается на мгновенный ток (I), а затем интегрируется за определенный период времени (t).Истинный расчет мощности будет работать с любым типом сигнала независимо от коэффициента мощности.
Гармоники создают дополнительную сложность. Несмотря на то, что электрическая сеть номинально работает на частоте 60 Гц, существует много других частот или гармоник, которые потенциально могут существовать в цепи, а также может присутствовать составляющая постоянного или постоянного тока. Общая мощность рассчитывается путем рассмотрения и суммирования всего содержимого, включая гармоники.
Несмотря на то, что электрическая сеть номинально работает на частоте 60 Гц, существует много других частот или гармоник, которые потенциально могут существовать в цепи, а также может присутствовать составляющая постоянного или постоянного тока. Общая мощность рассчитывается путем рассмотрения и суммирования всего содержимого, включая гармоники.
Вышеуказанные методы расчета используются для обеспечения точного измерения мощности и истинного среднеквадратичного (среднеквадратичного) измерения для любого типа сигнала, включая все гармонические составляющие, вплоть до полосы пропускания прибора.
Измерение мощности трехфазных двигателейВ отличие от однофазных систем, каждый проводящий провод в трехфазной системе электропитания пропускает переменный ток той же частоты и амплитуды напряжения относительно общего эталона, но с разностью фаз в одну треть периода.
Трехфазные системы имеют преимущества перед однофазными, что делает их пригодными для передачи энергии и в таких приложениях, как асинхронные двигатели.
- Фазное напряжение — это напряжение, измеренное между обмотками двигателя до нейтральной точки.
- Фазный ток — это ток через любой компонент трехфазного источника или нагрузки.
- При соединении треугольником линейное напряжение совпадает с фазным напряжением. Для синусоидальных волн линейный ток в √3 раз больше фазного тока.
- При соединении звездой или звездой линейное напряжение в √3 раз больше фазного напряжения, а токи одинаковы.
- Величина и частота фазных токов определяют крутящий момент и скорость вращения двигателя.
При обсуждении измерения мощности с помощью ваттметров часто ссылаются на теорему Блонделя при определении количества ваттметров, необходимых для многофазного питания. Теорема утверждает, что мощность, подаваемая в систему из N проводников, равна алгебраической сумме мощности, измеренной N ваттметрами. Кроме того, если общая точка расположена на одном из проводов, счетчик этого проводника может быть удален, и потребуется только N-1 счетчик.
Кроме того, если общая точка расположена на одном из проводов, счетчик этого проводника может быть удален, и потребуется только N-1 счетчик.
Измерение относительно просто, если объектом измерения является трехфазная 4-проводная система. Как показано на Рисунке 2, трехфазный четырехпроводной включает в себя подключение ваттметров к каждой фазной обмотке на основе нейтрального проводника. Получите мощность для каждой фазной обмотки, измерив напряжение (фазное напряжение) и ток (фазный ток) для каждой фазы с помощью разных ваттметров. Суммирование даст значение трехфазной мощности. Для измерения трехфазной 4-проводной мощности требуется три ваттметра.
Рисунок 2 — Трехфазное соединение звездой (3P4W)
Трехфазное соединение треугольником (3V3A)
Большинство двигателей не имеют нейтрального соединения и поэтому требуют подключения вольтметров по схеме треугольника (3V3A). Это означает, что фазное напряжение нельзя измерить напрямую, и вместо этого вольтметры подключаются по схеме «линия-линия» (треугольник). Этот метод подключения приводит к 3-проводному измерению, и измеряются три напряжения (R к T, S к T, R к S).Схема подключения для метода соединения треугольником и векторная карта показаны на рисунке 3.
Это означает, что фазное напряжение нельзя измерить напрямую, и вместо этого вольтметры подключаются по схеме «линия-линия» (треугольник). Этот метод подключения приводит к 3-проводному измерению, и измеряются три напряжения (R к T, S к T, R к S).Схема подключения для метода соединения треугольником и векторная карта показаны на рисунке 3.
Рисунок 3 — Трехфазное соединение треугольником (3V3A)
Применяя теорему Блонделя, при вычислении полной мощности используются только 2 ваттметра. Несмотря на то, что требуется всего 2 ваттметра, использование трех ваттметров желательно, поскольку оно дает дополнительную информацию, которую можно использовать для балансировки нагрузки и определения истинного коэффициента мощности.
Основные измерения механической мощности В электродвигателе механическая мощность определяется как скорость, умноженная на крутящий момент.Механическая мощность обычно определяется как киловатт или лошадиные силы, при этом один Вт равен 1 Джоуль / сек или 1 Нм / сек.
лошадиных сил — это работа, выполняемая за единицу времени. Один л.с. равен 33 000 фунт-футов в минуту. Преобразование л.с. в ватт достигается с использованием этого соотношения: 1 л.с. = 746 Вт. Однако преобразование часто упрощается, используя 746 Вт на л.с. Механическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя. На рынке существует множество различных типов датчиков скорости и крутящего момента, которые можно интегрировать в динамометр.Эти датчики могут использоваться для измерения скорости и крутящего момента, необходимых для получения информации о механических измерениях, чтобы вычислить измерения механической мощности в анализаторе мощности.
Расчеты двигателя и скорости могут быть выполнены непосредственно на анализаторе мощности. Подключение для этого измерения зависит от типа сигнала для скорости и крутящего момента, выводимого в виде импульсного или аналогового сигнала или трехфазного импульса энкодера, представленного фазами A, B, Z.
Рисунок 4 — Схема подключения крутящего момента и скорости для аналоговой или импульсной формы сигнала
Рисунок 5 — Подключение крутящего момента и двигателя для трехфазного энкодера 4-этапный процесс тестирования двигателей и приводных систем
Полное испытание двигателя и системы привода — это четырехэтапный процесс.
Шаг 1 — точное измерение трехфазной входной мощности для частотно-регулируемого привода (VFD).
Шаг 2 — точное измерение напряжения шины постоянного тока.
Шаг 3 — точное измерение входной мощности двигателя / выходной мощности частотно-регулируемого привода с ШИМ-управлением.
Шаг 4 — точное измерение механической мощности двигателя.
В этом разделе мы обсудим, как добиться наиболее точных измерений мощности и КПД, измерения мощности для трехфазных двигателей переменного тока и приводных систем, пройдя через точки измерения, перечисленные ниже, и как добиться наиболее точных измерений мощности и КПД. .При использовании частотно-регулируемого привода с широтно-импульсной модуляцией для управления двигателем часто необходимо измерить как входной, так и выходной сигнал частотно-регулируемого привода, а также секцию аналого-цифрового преобразования постоянного тока, чтобы получить полное представление о конструкции и эффективности привода переменного тока.
.При использовании частотно-регулируемого привода с широтно-импульсной модуляцией для управления двигателем часто необходимо измерить как входной, так и выходной сигнал частотно-регулируемого привода, а также секцию аналого-цифрового преобразования постоянного тока, чтобы получить полное представление о конструкции и эффективности привода переменного тока.
Рисунок 6 — Измерения и точки измерения двигателя переменного тока и системы привода
Шаг 1. Точное измерение трехфазной входной мощности
Измерение входной мощности важно не только для понимания того, насколько чиста мощность, которая поступает в привод переменного тока, но также важно измерять любые гармоники, которые привод может генерировать и которые возвращаются в эту сеть.Архитектура привода переменного тока состоит из секции выпрямителя, которая прерывает формы волны переменного тока и фильтрует линейное напряжение переменного тока в постоянный ток, и секции инвертора, которая преобразует постоянный ток в сигналы с импульсной модуляцией (ШИМ), которые приводят в действие двигатель. Сигналы напряжения и тока на выходных каскадах выпрямителя и инвертора (точки 2 и 3) будут иметь искажения, связанные с используемыми технологиями. В этих технологиях часто используется импульсная силовая электроника, которая генерирует высокочастотные сигналы, что приводит к гармоническому содержанию во входной сети питания (точка 1).Измерение общих гармонических искажений (THD) на входе будет отражать влияние технологий, используемых в двигателе и системе привода, на качество электроэнергии в сети.
Сигналы напряжения и тока на выходных каскадах выпрямителя и инвертора (точки 2 и 3) будут иметь искажения, связанные с используемыми технологиями. В этих технологиях часто используется импульсная силовая электроника, которая генерирует высокочастотные сигналы, что приводит к гармоническому содержанию во входной сети питания (точка 1).Измерение общих гармонических искажений (THD) на входе будет отражать влияние технологий, используемых в двигателе и системе привода, на качество электроэнергии в сети.
Для электромобилей или других приложений, которые снабжают систему привода источником постоянного тока, измерение изменяется, но точка измерения и важность измерения не меняются. Эта система удаляет из привода ступень преобразования переменного тока в постоянный.
Рисунок 7 — Двигатель и система привода с источником постоянного тока
Шаг 2.Измерение напряжения шины постоянного тока
Привод переменного тока использует емкостную фильтрацию для преобразования выпрямленной сети переменного тока в сигналы постоянного тока. Измерение этих уровней постоянного тока важно, поскольку аналого-цифровой преобразователь в постоянный ток неизбежно вносит сильно искаженный входной ток, что приводит к серьезным гармоникам тока и низкому коэффициенту мощности.
Измерение этих уровней постоянного тока важно, поскольку аналого-цифровой преобразователь в постоянный ток неизбежно вносит сильно искаженный входной ток, что приводит к серьезным гармоникам тока и низкому коэффициенту мощности.
Напряжение шины постоянного тока в приводе переменного тока может быть измерено для проверки условий повышенного и пониженного напряжения и может быть выполнено внутри привода на клеммах конденсаторной батареи, как показано на Рисунке 6 в контрольной точке 2.Однако более простой способ — использовать отображение формы сигнала анализатора мощности с измерением курсора. При отображении формы сигнала с помощью курсорного измерения необходимо убедиться, что курсор не находится прямо над небольшими выступами на дисплее. Вместо этого курсор должен находиться поперек осциллограммы, чтобы выполнить точное измерение.
Шаг 3. Точные измерения выходной мощности частотно-регулируемого привода / входной мощности двигателя Как и в шаге 1, измерение мощности на выходе частотно-регулируемого привода и входе в двигатель важно по нескольким причинам. Для правильного измерения эффективности привода переменного тока необходимо измерить выходную мощность привода. Кроме того, важно измерить гармоники, создаваемые приводом переменного тока, которые передаются на двигатель. Поскольку двигатель представляет собой индуктивную нагрузку, он фильтрует большую часть высокочастотной энергии. Энергия в высокочастотных сигналах представлена как реактивная мощность, которая не работает при вращении двигателя, но может проявляться в виде тепла, которое может медленно сокращать срок службы двигателя.
Для правильного измерения эффективности привода переменного тока необходимо измерить выходную мощность привода. Кроме того, важно измерить гармоники, создаваемые приводом переменного тока, которые передаются на двигатель. Поскольку двигатель представляет собой индуктивную нагрузку, он фильтрует большую часть высокочастотной энергии. Энергия в высокочастотных сигналах представлена как реактивная мощность, которая не работает при вращении двигателя, но может проявляться в виде тепла, которое может медленно сокращать срок службы двигателя.
При измерении выхода VDF важно понимать, что использование линейного фильтра (нижних частот) ограничивает полосу пропускания измерений.Однако важно включить частотный фильтр, который не зависит от сетевого фильтра. Этот фильтр работает параллельно с АЦП и необходим для обнаружения перехода через нуль формы сигнала тока без ограничения полосы пропускания измерений. Этот фильтр помогает определить основную частоту, которая необходима для гармонического анализа и соотнесения скорости вращения магнитного поля с фактической скоростью вращения двигателя.
На рис. 8 показан сигнал выходного напряжения ШИМ с сильно искаженным напряжением, прерывистыми высокими частотами и большим количеством шумов на токовой стороне, что затрудняет измерение.Высокочастотное переключение сигнала напряжения создает сильно искаженную форму волны с высоким содержанием гармоник.
Рисунок 8 — Формы выходного напряжения и тока инвертора переменного тока
Для такого зашумленного сигнала нужны специальные датчики тока для измерения. Для точных измерений мощности с ШИМ также необходимы анализаторы мощности с широкой полосой пропускания, способные измерять эти сложные сигналы. На рисунке 9 показан пример содержания гармоник напряжения на выходе ШИМ. Присутствуют частоты биений, а содержание гармоник напряжения превышает 500 порядков (примерно 30 кГц).Большая часть гармоник приходится на нижние частоты на токовой стороне.
Рекомендации при измерении выходной мощности приводаНапряжение, ток и мощность инвертора обычно измеряются одним из трех методов, которые включают содержание гармоник или измерение, которое выделяет величину основной частоты.
Первый метод — использовать простой фильтр нижних частот (фильтр Iine) для удаления высоких частот. Если в анализаторе мощности есть этот фильтр, просто включите его.Правильная фильтрация приведет к измерениям напряжения, тока и мощности, отражающим вклад основной частоты инвертора. Однако важно понимать, что этот тип фильтрации не предлагает измерения полной полосы пропускания, так как таковые результирующие числа будут отсутствовать для всего высокочастотного контента.
Второй метод относится только к измерениям напряжения. Это называется методом измерения выпрямленного среднего, который выдает среднеквадратичное значение напряжения основной волны без фильтрации с использованием определения среднего значения напряжения, масштабированного до среднеквадратичного напряжения.Алгоритм выпрямленного среднего среднего за период времени обеспечит эквивалент основного напряжения, который будет очень близок к среднеквадратичному значению основной волны. Используя этот метод, можно измерить полную мощность, общий ток и основное напряжение.
Третий и наиболее полный метод — использование цифрового гармонического анализа. Эта функция может использоваться для выделения отдельных спектральных составляющих напряжения, тока и мощности с помощью быстрого преобразования Фурье (БПФ) для определения амплитуды каждой гармонической составляющей, включая основную волну.Этот метод работает параллельно с измерениями полной полосы пропускания, чтобы одновременно обеспечивать измерения тока и мощности полной полосы пропускания и напряжения основной частоты.
Привод должен поддерживать постоянное соотношение В / Гц по сравнению с рабочей скоростью двигателя. Анализатор мощности может рассчитывать В / Гц, используя среднеквадратичное значение или значение основного напряжения. Определенная пользователем математическая функция анализатора используется для построения уравнения для этого измерения.
Шаг 4. Точные измерения механической мощности двигателяМеханическая мощность измеряется как скорость двигателя, умноженная на крутящий момент двигателя.Датчики скорости и крутящего момента должны быть установлены на диномометре двигателя и интегрированы в испытательную систему. Эти датчики обычно представляют собой аналоговый выход напряжения или частотный выход. Современные анализаторы мощности могут работать с обоими типами и обеспечивать поддержку датчиков положения вращения, таких как энкодеры.
Собираем все вместе — преобразователь переменного тока в постоянный, инвертор, двигатель и КПД системы / трансмиссии КПДКПД можно выразить в простейшей форме как отношение выходной мощности к общей входной мощности или КПД = выходная мощность / входная мощность.Для двигателя с электрическим приводом выходная мощность является механической, в то время как входная мощность является электрической, поэтому уравнение эффективности выглядит следующим образом: КПД = механическая мощность / входная электрическая мощность.
Более комплексный метод — использовать анализатор мощности с несколькими входами для одновременного измерения входа и выхода. Это приводит к более точному расчету эффективности, поскольку он использует один анализатор мощности для устранения потенциальных ошибок, вызванных измерениями временного сдвига. С помощью внутренних математических вычислений, предоставляемых анализатором, можно настроить очень простое вычисление с использованием меню для расчета потерь привода и эффективности привода.
Рисунок 9 — Каждая измерительная секция двигателя и системы привода имеет определенные измерения эффективности.
КПД от переменного к постоянному току
Привод переменного тока состоит из двух основных секций: преобразователя аналого-цифрового сигнала в постоянный и инвертора. Выпрямление и фильтрация сигнала на постоянный ток часто приводит к сильным гармоникам тока, что приводит к потерям мощности. Понимание потерь и эффективности этого раздела может помочь улучшить конструкцию приводов переменного тока и, в конечном итоге, приведет к повышению общей эффективности.Уравнение эффективности AD в DC представляет собой мощность постоянного тока в точке измерения 2, деленную на сумму трехфазной мощности в точке измерения 1.
КПД по переменному току КПД привода переменного тока, привода или инверторав простейшей форме рассчитывается как выходная мощность, деленная на входную мощность и представляемая в процентах. Один из методов, используемых для измерения входной и выходной мощности, заключается в простом подключении измерителей мощности к входу и выходу, при этом показания двух измерителей используются для расчета эффективности, как показано на рисунке 10.
Поскольку работа привода переменного тока заключается в регулировке скорости выходного сигнала переменного тока на двигатель для достижения оптимальной производительности, эффективность привода переменного тока важна при разработке алгоритмов контроллера. Уравнение для КПД привода показано как отношение суммы трехфазной мощности в точке измерения 3 к сумме трехфазной мощности на входе переменного тока в точке измерения 1.
КПД двигателяКПД двигателя — это мера эффективности преобразования электрической энергии в механическую.КПД двигателя можно выразить как выходную мощность, деленную на потребляемую мощность. Измерение КПД двигателя не так просто, как у
.измерения привода переменного тока, поскольку выходная мощность, обозначенная в числителе в уравнении, представляет собой преобразование механической мощности в электрическую с использованием измерителя крутящего момента, энкодера или резольвера. Уравнение может быть изменено на механическую мощность, деленную на сумму трехфазной мощности в точке измерения 3. Это измерение часто выполняется на разных скоростях при разной нагрузке, обычно отображаемой на кривой крутящего момента.
Измерение КПД двигателя предназначено для количественной оценки потерь, связанных с конструкцией и работой двигателя. Топ-5 потерь в двигателях можно разделить на:
- Потери I2R статора
- Потери I2R ротора
- Паразитная нагрузка
- Потери в сердечнике в статоре и роторе
- Трение и ветер
Каждую из этих потерь можно свести к минимуму с помощью различных методов, что является целью разработчиков двигателей.
КПД трансмиссииИзмерение эффективности трансмиссии можно рассматривать как цепочку преобразования энергии, рассматривая каждую подсистему, включая преобразователь AD в постоянный ток, инвертор, двигатель и устройство механической энергии, как часть уравнения. Это измерение учитывает все потери в двигателе и системе привода и полезно в новых конструкциях, где некоторые или все части привода переменного тока включены в конструкцию двигателя. Это измерение суммируется как механическая мощность в точке измерения M, деленная на сумму трехфазной мощности в точке измерения 1.
ЗаключениеПри измерении мощности электродвигателя и системы привода необходимо учитывать множество факторов, включая входную мощность, КПД инвертора, КПД электродвигателя, гармоники и коэффициент мощности. Эти измерения включают сложные уравнения, поэтому большинство компаний используют анализаторы мощности для автоматического получения результатов.
При выполнении четырехэтапного процесса на частотно-регулируемом приводе и системе двигателя необходимо использовать 7-фазный анализатор мощности, как показано на рисунке 10.Одновременный сбор этапов измерения 1–4 в одном приборе является преимуществом для выравнивания фаз и выравнивания между измерениями напряжения и тока, что приводит к наиболее точному измерению мощности. Это также позволяет упростить измерения эффективности.
Рисунок 10 — Двигатель и система привода, подключенные к 7-фазному анализатору мощности с механическим входом
PPV Вентиляторы: электродвигатели с регулируемой скоростью
Super Vac VR3 — это электрический вентилятор с регулируемой скоростью и положительным давлением, созданный на основе популярной модели VR2.VR3 — единственный в отрасли вентилятор с регулируемой скоростью, который без проблем с совместимостью будет работать на любой цепи GFCI на 15 А и на всех новых гидравлических генераторах. Он также обеспечивает точное управление движением воздуха и на 33% больше воздушного потока, чем односкоростные электрические PPV.
Сердце VR3 — знаменитое семиконечное лезвие Super Vac, создающее мощный воздушный поток. Лезвие с аэродинамическим профилем из литого алюминия лучше, чем пластик, выдерживает высокую тепловую нагрузку при возгорании конструкций.
VR3 поддерживает приверженность Super Vac к безопасности за счет полностью выполненного каркаса безопасности, который обеспечивает защиту кожуха и двигателя.Кожух можно наклонять в четыре различных положения от -10 ° до 20 °. Рама покрыта порошковой краской, которая долговечна.
Транспортировка легка с установленными на борту амортизирующими шинами, которые позволяют пользователю подниматься и спускаться по лестнице и маневрировать в углах благодаря своей конструкции с нулевой точкой захвата. Ступенчатый тормоз фиксирует оба колеса в нужном положении, обеспечивая прочную основу при использовании или хранении. Складывающаяся вниз ручка позволяет легко разместить устройство в небольших отсеках грузовика.
| Модель | Размер | Двигатель | ВxШxГ | Вес | Обороты | Выход |
|---|---|---|---|---|---|---|
| 716VR3 | 16 « | 1 1/4 л. |