Регулятор мощности с фазовым управлением симистором на микроконтроллере PIC16F84A
Регулятор предназначен для плавного управления мощностью активнойнагрузки, питающейся от сети переменного тока 220 вольт частотой 50 Гц.Мощность нагрузки зависит от типа применяемого симистора. В основуметода управления положен принцип фазового регулирования моментавключения симистора, включенного последовательно с нагрузкой.
Фото регулятора представлены на риснках :
В момент включения мощность на нагрузке нарастает плавно, что удобно,если регулятор будет использоваться для регулирования яркости лампыосвещения. Вообще область применения регулятора самая широкая.
Основнымэлементом регулятора является микроконтроллер PIC16F84A.По входу RB0 микроконтроллера организовано прерывание в момент переходасетевого напряжения через ноль. Перепад на этом выводе формирует узелна оптопаре U1 (АОУ110Б). От момента прерывания программно организованазадержка включения симистора, которая меняется в определённых пределах.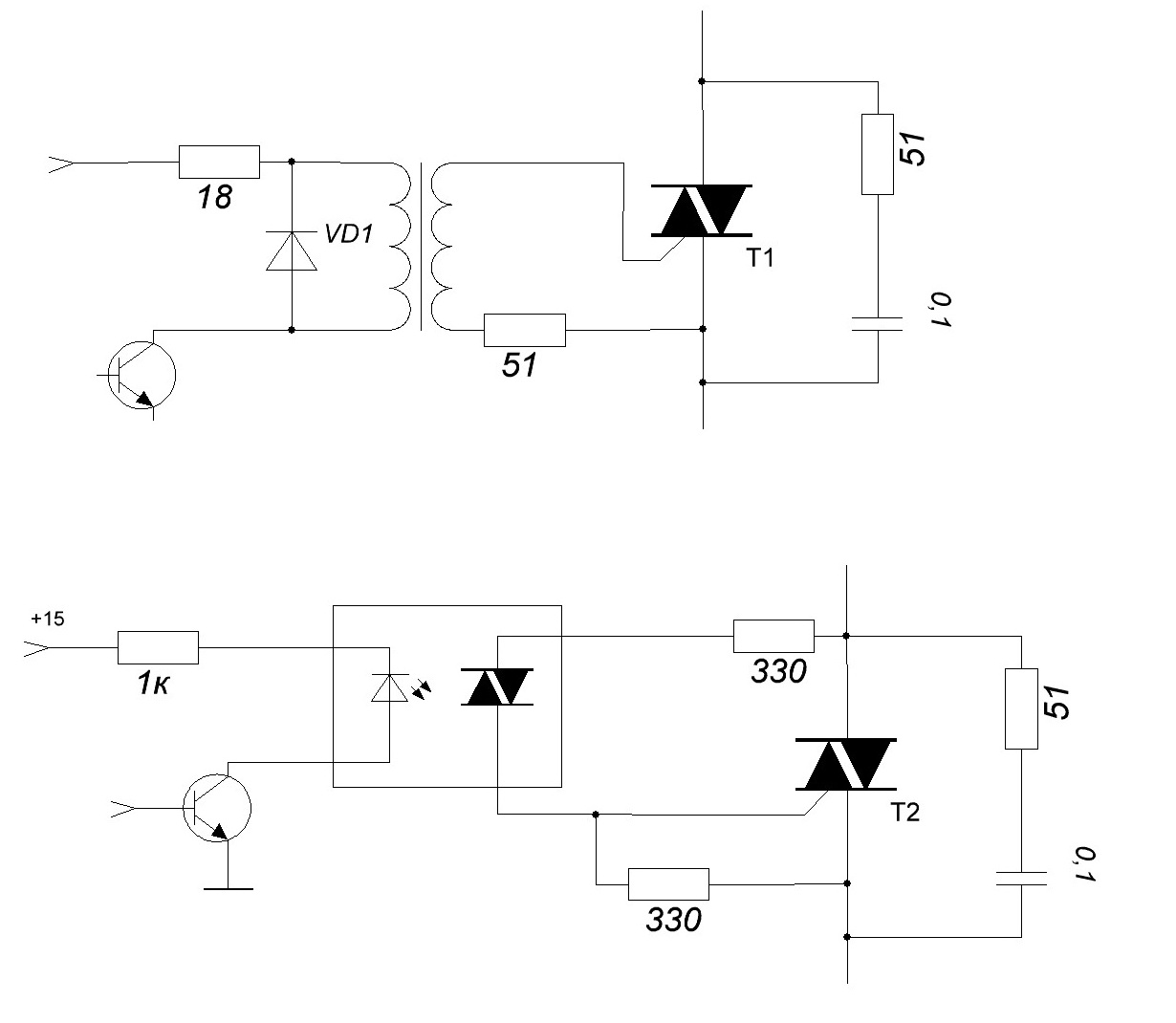
Схема регулятора мощностипредставлена на рисунке :
Погрешность соответствия показаний индикатора и действительной мощностиподводимой к нагрузке вполне достаточная для применения регулятора длябытовых целей. Кнопки S1 и S2 служат дляувеличения и уменьшения мощности соответственно. В подпрограмме опросакнопок организовано несколько режимов, удобных в пользовании, приоднократном нажатии изменение на единицу значения, при долгом нажатиибыстрое изменение и очень быстрое.
Узел управления симисторомсостоит из элементов U2, VD3, R5, стандартное схемное решение,оптотиристор U2 (АОУ103В) обеспечивает гальваническую развязку и спомощью диодного моста VD3 (W08) управление симистором VS1.
Схема питается от сети черезтрансформатор T1. Далее напряжение выпрямляется диодным мостом VD2,часть напряжения поступает на оптопару U1, для формированияперепада перехода сетевого напряжения через ноль, остальная часть черездиод VD1 на микросхему стабилизатора IC1, которая стабилизируетнапряжение до 5 вольт.
Печатные платы в формате LAY:
печатная плата PicPower
плата управлениясемистором
Прошивка для микроконтроллера PIC16F84A в HEX формате :PicPower.rar
Та-же прошивка в формате программы ProgCode : PicPower.sfr
(PDF) Тиристорный регулятор мощности переменного тока на микроконтроллере
Тиристор и симистор управляются подобно триггеру. При подаче
управляющего импульса в цепь управления (напряжение между управляющим
электродом и катодом) тиристор резко переходит в открытое состояние и
остается в таком состоянии до тех пор, пока через него проходит прямой ток,
даже если управляющий сигнал прекратился. Поэтому тиристоры можно
открывать короткими импульсами. Закрываются они сами при снижении тока до
нуля. На переменном токе каждый тиристор можно открывать в полуволне
напряжения одного знака, поскольку тиристор проводит силовой ток в одном
направлении, как диод. Симистор может проводить ток в обоих направлениях и
Симистор может проводить ток в обоих направлениях и
открывается в любой полуволне напряжения.
Если открывающий импульс сместить относительно начала полуволны
напряжения на время
t, то на нагрузке выделится только ее часть. Изменяя с
помощью напряжения регулировки
V временное смещение
t можно
регулировать ширину части полуволны напряжения
V, которое
прикладывается к нагрузке. Такой способ регулирования называют фазовым.
Система управления
Микроконтроллер в системе управления выполняет функции фазового
регулятора. Назначение выводов микроконтроллера в данной схеме следующее:
Аналоговые входы 0-5 В
GP0 – напряжение регулировки угла
или временного смещения
t
открывания вентиля,
GP1 – задатчик времени нарастания и спада угла регулировки от 0 до
максимума в пределах 20 мс-10 с,
GP2 – задатчик времени реакции на провалы напряжения сети 20 мс-2,56 с,
Дискретные порты
GP3 – вход синхроимпульсов,
GP4 – выход индикатора задаваемого угла проводимости вентиля,
GP5 – выход открывающих импульсов.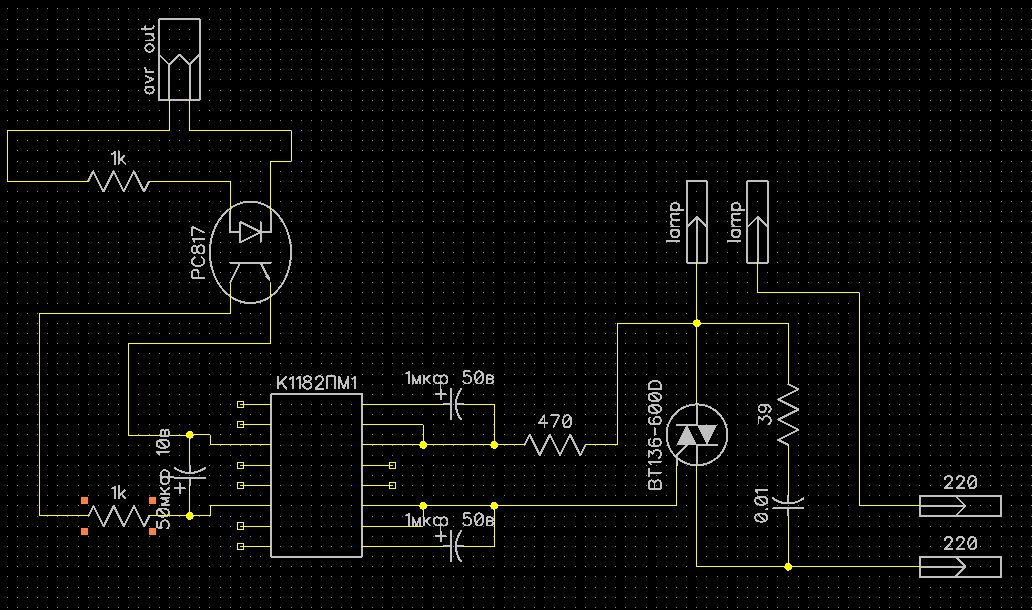
Система управления работает следующим образом. В нормальном режиме
на выводе GP3 микроконтроллера должны быть синхроимпульсы с частотой
100 Гц ±5%, поступающие через оптрон синхронизации. Тогда на выходе GP4
будут индикаторные импульсы и на выходе GP5 – серии открывающих
импульсов с частотой синхроимпульсов. Выходные импульсы разрешены при
напряжении регулировки
V>0,1 В. Изменение напряжения регулировки
V от примерно 0,1 В до 5 В вызовет изменение временного смещения
t
открывающих импульсов от 10мс до нуля, как видно на диаграмме напряжений
регулятора. Возможна регулировка потенциометром и внешним сигналом в виде
постоянного либо импульсного напряжения с частотой более 500 Гц.
Программный алгоритм микроконтроллера имеет функции временной
фильтрации импульсных помех сигнала синхронизации, что позволяет сохранять
устойчивую работу системы управления в условиях промышленной сети.
6.3. Фазовое управление тиристора
6.3.1. Общие сведения
При фазовом способе управления на управляющий электрод тиристора подаются короткие импульсы напряжения, отпирающие тиристор в определенной точке полуволны приложенного напряжения. Запирается тиристор автоматически в момент перехода тока через ноль. Изменение точки (фазового угла) отпирания приводит к изменению среднего за полупериод значения тока нагрузки (рис. 6.3.1).
Рис. 6.3.1
В данной работе исследуется тиристорный регулятор выпрямления тока. Последовательно с нагрузкой, состоящей из лампы накаливания EL и добавочного резистора R1, включен тиристор V1, управляемый от генератора импульсов.
Генератор
импульсов выполнен на однопереходном
транзисторе VT. При подаче полуволны напряжения на анод
запертого тиристора конденсатор C заряжается через сопротивления R2, RП и R3.
Когда напряжение на конденсаторе
достигает значения 0,7…0,8 UСТ,
транзистор открывается и конденсатор
разряжается по цепи эмиттер – база –
управляющий электрод – катод тиристора.
Тиристор отпирается, создает цепь для
протекания тока через нагрузку и
одновременно шунтирует генератор
импульсов. Индуктивность L служит для создания колебательного
контура в цепи разряда конденсатора
для более четкого запирания однопереходного
транзистора. Скорость заряда конденсатора
и, следовательно, задержка подачи
отпирающего импульса по отношению к
моменту подачи положительного напряжения
на анод тиристора регулируется
потенциометром RП.
При подаче полуволны напряжения на анод
запертого тиристора конденсатор C заряжается через сопротивления R2, RП и R3.
Когда напряжение на конденсаторе
достигает значения 0,7…0,8 UСТ,
транзистор открывается и конденсатор
разряжается по цепи эмиттер – база –
управляющий электрод – катод тиристора.
Тиристор отпирается, создает цепь для
протекания тока через нагрузку и
одновременно шунтирует генератор
импульсов. Индуктивность L служит для создания колебательного
контура в цепи разряда конденсатора
для более четкого запирания однопереходного
транзистора. Скорость заряда конденсатора
и, следовательно, задержка подачи
отпирающего импульса по отношению к
моменту подачи положительного напряжения
на анод тиристора регулируется
потенциометром RП.
Экспериментальная часть Порядок выполнения эксперимента
Соберите цепь согласно схеме (рис.
 6.3.2) и подайте
на вход этой цепи синусоидальное
напряжение 24 В, 50 Гц. Для измерения тока
в цепи нагрузки и угла задержки отпирания
тиристора включите виртуальные приборы
V0,
A1
и виртуальный осциллограф. Не забудьте
установить род измеряемой величины –
«среднее значение».
6.3.2) и подайте
на вход этой цепи синусоидальное
напряжение 24 В, 50 Гц. Для измерения тока
в цепи нагрузки и угла задержки отпирания
тиристора включите виртуальные приборы
V0,
A1
и виртуальный осциллограф. Не забудьте
установить род измеряемой величины –
«среднее значение».
Рис. 6.3.2
Включите блок генераторов напряжений, настройте осциллограф и, вращая ручку потенциометра, убедитесь, что регулируется угол задержки отпирания тиристора и среднее значение выпрямленного тока.
При одном из положений потенциометра перерисуйте кривые выпрямленных напряжения и тока на рис. 6.3.3. Определите и запишите масштабы.
mU = … В/дел; mI = … мА/дел; mα = … град/дел
Рис. 6.3.3
Изменяя угол задержки отпирания от минимально возможного значения до максимального, снимите зависимость IH(α), занесите результаты измерений в табл.
6.3.1 и на рис. 6.3.4 постройте график.
Примечание: для уменьшения минимально возможного угла α замените конденсатор С = 0,47 мкФ на 0,1 мкФ.
IН
Рис. 6.3.4
Таблица 6.3.1
, | 18 | 36 | 72 | 108 | 144 | 180 |
IН, мА |
Контрольные вопросы
1. Какова величина напряжения отпирания симистора (по рис. 6.1.5)?
2. Каковы
величины дифференциального сопротивления
симистора в запертом состоянии и отпертом
состояниях при токе 2…3 мА?
Каковы
величины дифференциального сопротивления
симистора в запертом состоянии и отпертом
состояниях при токе 2…3 мА?
3. Какие причины «заставляют» симистор вернуться к запертому состоянию?
4. Запирается ли отпертый тиристор, когда отключается напряжение цепи управляющий электрод ¤ катод?
5. Что случится с отпертым тиристором при размыкании выключателя в цепи (рис. 6.2.2), если UУК > UОТП? Если UЭК < UОТП?
6. Как поведет себя тиристор, если к цепи (рис. 6.2.2) вместо постоянного напряжения приложить синусоидальное напряжение при UУК > UОТП? при UУК < UОТП?
7. Что
произойдет с отпертым тиристором при
его кратковременном шунтировании
перемычкой в цепи (рис. 6.2.2), если UУК > UОТП?
Если UУК < UОТП?
6.2.2), если UУК > UОТП?
Если UУК < UОТП?
8. Какие свойства проявляет тиристор, работая при измененной на противоположную полярности напряжений?
9. Как изменяется ток нагрузки при увеличении угла отпирания тиристора?
Симистор и его применения — основы радиотехники
Тиристор идеально подходит для регулирования мощности переменного напряжения во всем, кроме одного: он является однополупериодным устройством, а это означает, что даже при полной проводимости используется только половина мощности. Можно включить параллельно два тиристора навстречу друг другу, как это показано на рис.1, чтобы обеспечить двух-полупериодный режим работы, однако для этого требуется подавать импульсы запуска на управляющие электроды от двух изолированных, но синхронных источников, как это видно из рисунка.
Рис.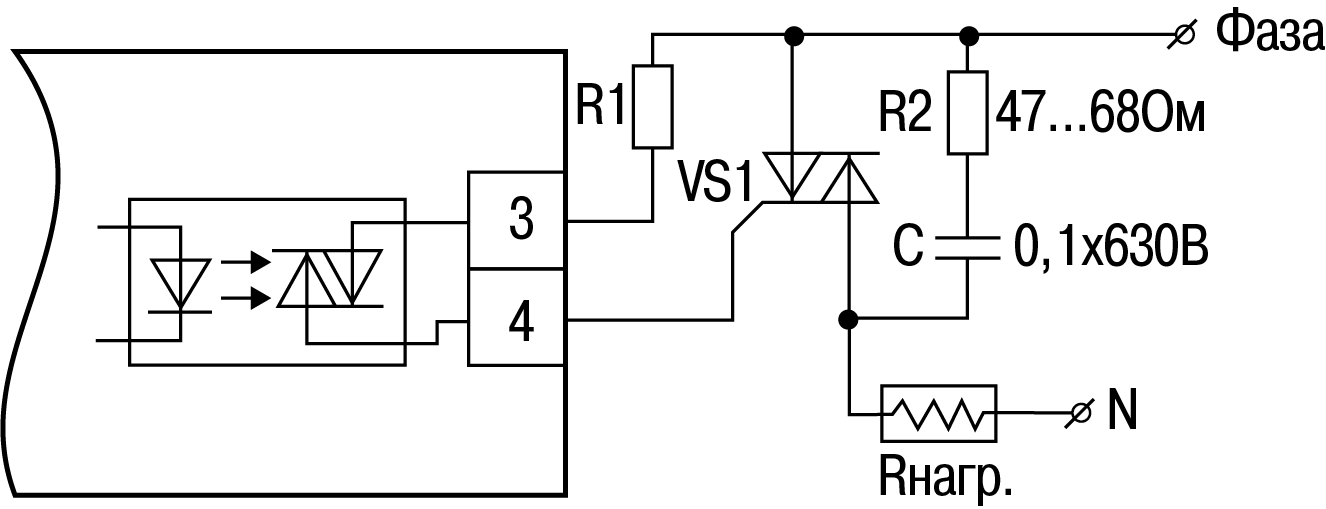 1 Двухполупериодный регулятор можно построить на двух тиристорах. Для изоляции источников импульсов от напряжения сети используются оптопары.
1 Двухполупериодный регулятор можно построить на двух тиристорах. Для изоляции источников импульсов от напряжения сети используются оптопары.
Самым полезным устройством для практического регулирования мощности переменного напряжения является двунаправленный тиристор или симистор. Как можно видеть на рис2. симистор можно рассматривать как два инверсно-параллельных тиристора с управлением от единственного источника сигнала. Симисторы являются настолько гибкими устройствами, что их можно переключать в проводящее состояние как положительным, так и отрицательным импульсом запуска независимо от мгновенной полярности источника переменного напряжения. Названия катод и анод теряют смысл для симистора; ближайший к управляющему электроду вывод назвали, не мудрствуя лукаво, основным выводом 1 (МТ1), а другой — основным выводом 2 (МТ2). Запускающий импульс всегда подается относительно вывода МТ1 так же, как в случае тиристора он подается относительно катода.
Рис2.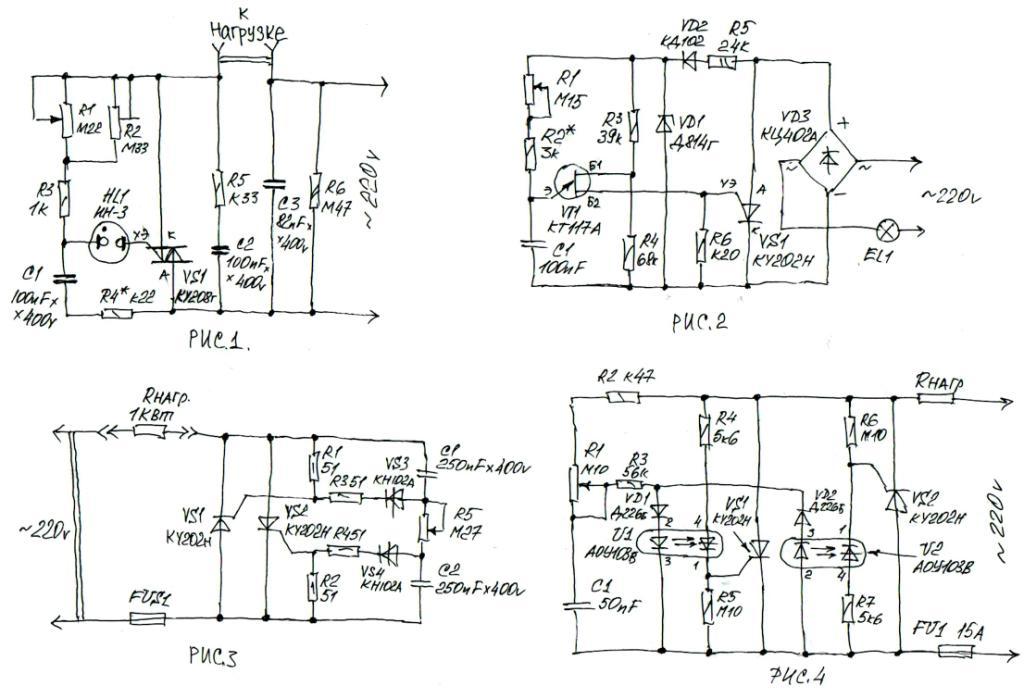 Симистор: (а) структура, (b) условное обозначение.
Симистор: (а) структура, (b) условное обозначение.
Обычно для переключения симистора, рассчитанного на ток до 25 А, достаточен пусковой ток 20 мА, и одним из простейших примеров его применения является «твердотельное реле», в котором небольшой пусковой ток используется для управления большим током нагрузки (рис.3). В качестве ключа SW1 могут быть геркон, чувствительное термореле или любая контактная пара, рассчитанная на 50 мА; ток в цепи нагрузки ограничивается только параметрами симистора. Полезно отметить, что резистор R1 в цепи запуска находится под напряжением сети только в моменты включения симистора; как только симистор включается, разность потенциалов на резисторе R1 падает до величины около одного вольта, так что достаточен полуваттный резистор.
Рис.3 Простое «твердотельное реле» на симисторе.
Весьма распространенными применениями симистора являются регулятор яркости для лампы или управление скоростью вращения мотора. На рис.4 показана такая схема. Временное положение запускающих импульсов устанавливается RC-фазовращателем; потенциометром R2 регулируют яркость лампы, тогда как резистор R1 просто ограничивает ток, когда потенциометр установлен в положение с минимальным сопротивлением. Сами импульсы запуска формируются динистором, то есть двунаправленным триггерным диодом. Динистор можно представить себе как маломощный тиристор без управляющего электрода с низким напряжением лавинного пробоя (около 30 В). Когда разность потенциалов на конденсаторе С1 достигает уровня пробоя в динисторе, мгновенный импульс разряда конденсатора включает симистор.
На рис.4 показана такая схема. Временное положение запускающих импульсов устанавливается RC-фазовращателем; потенциометром R2 регулируют яркость лампы, тогда как резистор R1 просто ограничивает ток, когда потенциометр установлен в положение с минимальным сопротивлением. Сами импульсы запуска формируются динистором, то есть двунаправленным триггерным диодом. Динистор можно представить себе как маломощный тиристор без управляющего электрода с низким напряжением лавинного пробоя (около 30 В). Когда разность потенциалов на конденсаторе С1 достигает уровня пробоя в динисторе, мгновенный импульс разряда конденсатора включает симистор.
Рис.4 Простейшая схема регулировки яркости лампы на симисторе с фазовым управлением.
Легко сделать автоматический фотоэлектрический выключатель лампы, присоединив параллельно конденсатору С1 фотоэлемент ORP12 (светозависимый резистор). Сопротивление фотоэлемента в темноте велико, порядка 1 МОм, но при дневном свете оно падает до нескольких килоом так, что симистор не может поджечься и лампа выключена.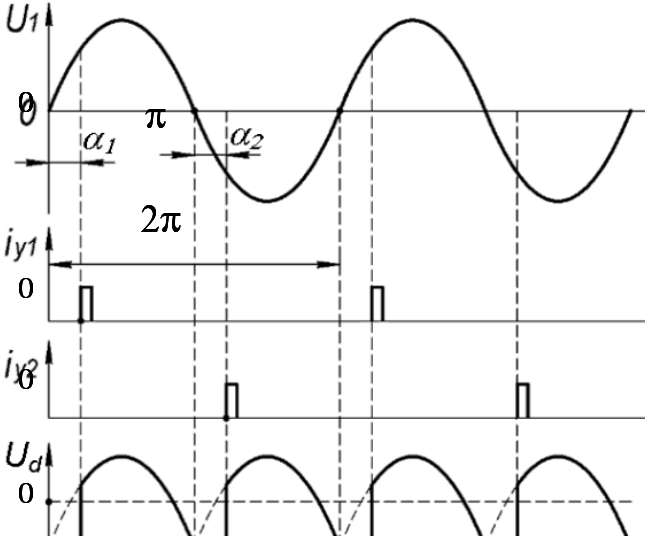 Если в автоматическом выключателе ручная регулировка не требуется, то резистор R2 можно заменить на короткое замыкание.
Если в автоматическом выключателе ручная регулировка не требуется, то резистор R2 можно заменить на короткое замыкание.
На рис.5 показано, как симистор управляет мощностью в нагрузке, отрезая начальную часть каждого полупериода. Длительность пропущенной части зависит от запаздывания пускового импульса по фазе, которое определяется сопротивлением R1+R2 и емкостью С1. В простейшей схеме управления на рис.4 фазовый сдвиг не может быть больше 90°, так как используется только одна RС-цепочка. Поэтому такая схема является плохим регулятором при малой мощности, поскольку в нем могут происходить неожиданные скачки от выключенного состояния к полной мощности.
Более совершенная схема приведена на рис.6; включение дополнительной RC-цепочки (R3С3) дает больший фазовый сдвиг для лучшего управления при малой мощности. Дальнейшие усовершенствования состоят во введении следующих элементов: (а) демпфера с постоянной времени R4С4 для предотвращения ошибочных переключений от противо-э. д.с. индуктивной нагрузки и (b) радиочастотного фильтра L1C1 для подавления помех. Последний элемент всегда следует вводить в симисторную или тиристорную схему, работающую по принципу «отсекания части колебания», поскольку быстрые включения и выключения могут создавать серьезные радиопомехи в питающей сети.
д.с. индуктивной нагрузки и (b) радиочастотного фильтра L1C1 для подавления помех. Последний элемент всегда следует вводить в симисторную или тиристорную схему, работающую по принципу «отсекания части колебания», поскольку быстрые включения и выключения могут создавать серьезные радиопомехи в питающей сети.
Рис.5 Форма напряжения на нагрузке в симисторном регуляторе при постепенном увеличении фазового сдвига.
Имеется большое число различных симисторов и тиристоров которые нашли широкое применение в бытовой технике. Как и в случае выпрямительных диодов, для того, чтобы выбрать прибор с нужными номинальными напряжением и током, можно обратиться к каталогам и справочным данным.
Рис.6 Симисторный регулятор мощности с широким диапазоном регулировки и встроенным подавлением помех.
Большинство производителей выпускают подходящие динисторы, но имеются также приборы, называемые quadrac, в которых объединены симистор и динистор.
На рис.7 показаны корпуса и цоколевка распространенных симисторов. Если симистор должен использоваться на полную допустимую мощность, то его необходимо закрепить на теплоотводе.
Подавление радиочастотных помех, создаваемых симисторными или тиристорными регуляторами с фазовым управлением, становится более трудным и дорогим при больших значениях тока нагрузки. В электрических нагревателях и в других нагрузках с большой инерционностью можно уменьшить помехи, пропуская каждый раз целое число полупериодов. Это позволяет избежать скачкообразных изменений тока, которые и вызывают радиочастотные помехи. Такой способ называется прерывистым запуском или управлением с целым числом периодов. Этот способ, как правило, не подходит для управления яркостью лампы из-за мерцания. Для осуществления управления с целым числом периодов подходят такие микросхемы, как SL441, включающиеся при нулевом напряжении. Они определяют пересечение напряжением сети нулевого уровня и обеспечивают запуск симистора от датчика, сопротивление которого меняется, например, от термистора.
Рис.7 Корпуса распространенных симисторов: (а) корпус Т066, (b) болтовой крепеж, (с) пластмассовый корпус Т0220.
Электроника НТБ — научно-технический журнал — Электроника НТБ
Механический термостатМеханический термостат, используемый в электроплитах и нагревателях с резистивным нагревательным элементом, работает следующим образом. При нагреве между двумя проводниками с помощью биметаллической пластины устанавливается электрический контакт. Коммутируемый ток протекает через биметаллическую пластину, вызывая ее нагрев, по достижении определенной температуры пластина изгибается, и соединение размыкается. После размыкания пластина остывает, и цикл повторяется. Для управления частотой повторения циклов нагрева используется специальный винт, с помощью которого регулируется сила сжатия контактов. Обычно на головке винта имеется ручка для выставления температуры или мощности. Ясно, что такая установка не может быть точной. Кроме того, в процессе работы вследствие постоянного температурного расширения-сжатия изнашиваются как сами контакты (обгорают), так и биметаллическая пластина . Все это сильно сказывается на долговечности металлических термостатов.
Принцип работы симистора
Симистор — полупроводниковый элемент с тремя выводами (двумя силовыми и одним управляющим), предназначенный для коммутации нагрузки в сети переменного тока. Для управления режимом работы симистора используется низковольтный сигнал, подаваемый на его управляющий электрод. При подаче напряжения на этот электрод симистор открывается и пропускает ток (рис.1). Каждый квадрант на рис.1 соответствует определенному режиму работы симистора: QI, QII и QIII — рабочие квадранты, QIV — запрещенный. В этом квадранте симистор может выйти из строя, и для сохранения его рабочего состояния используются специальные схемы защиты. Возможна работа только при отрицательных уровнях управляющего напряжения, т.е. в квадрантах QII и QIII. Следует заметить, что в настоящее время многие производители полупроводниковых приборов освоили производство так называемых трехквадрантных симисторов, у которых случайный переход в квадрант QIV невозможен.
Поскольку работой симистора управляет не уровень напряжения, а ток, возможно его подключение непосредственно к выводу микроконтроллера, ток которого может достигать 25 мА. Симистор остается в открытом состоянии до окончания полупериода коммутируемого напряжения. При переходе напряжения через нуль симистор закрывается — он оказывается в другом квадранте, и чтобы его открыть требуется следующий управляющий импульс.
Фазовое управление
Мощность, подводимая к нагрузке, может регулироваться за счет управления фазой через симистор (рис.2). Метод аналогичен широтно-импульсной модуляции и заключается в пропускании через симистор части полупериода сетевого напряжения. Ток нагрузки пропорционален интегралу от полученного сигнала. Этот режим используется в регуляторах освещенности — диммерах. Яркость свечения лампы пропорциональна площади под обрезанной синусоидой. Достоинство метода — равенство частоты пульсаций на нагрузке сетевой частоте. Это важно для управления осветительными приборами, так как уменьшение частоты может сказаться на появлении мерцания, заметного глазом.
Недостаток метода — возникновение наводок в результате резкого переключения симистора. Эти наводки ухудшают электромагнитную совместимость (EMI) устройства и могут вызвать ненужные переключения симистора.
Пропуск периодов
Альтернативный метод управления мощностью симистора — пропуск периодов подаваемого переменного напряжения. Для регулирования тока нагрузки симистор пропускает только часть периодов сетевого напряжения, при этом, поскольку симистор включается в момент перехода сетевого напряжения через нуль, проблема электромагнитной совместимости не возникает. Режим пропуска периодов пригоден для управления резистивными нагрузками, но не применим для осветительных приборов, так как вызывает мигание ламп накаливания.
Оба рассмотренных метода управления мощностью симистора требуют фиксировать момент прохождения сетевого напряжения через нуль. Один из способов выполнения этой задачи — подавать переменное сетевое напряжение непосредственно на вход микроконтроллера через последовательный резистор с сопротивлением несколько мегаом. И тут целесообразно использовать микроконтроллеры семейства PIC компании Microchip. Защитные диоды на портах этих микроконтроллеров позволяют ограничивать сетевое напряжение: сверху — напряжением питания и снизу — уровнем заземления (GND). Существует и альтернативный способ, который обсудим подробнее.
Рассмотрим схему блока управления нагрузкой микроконтроллера PIC10F204 компании Microchip со встроенным аналоговым компаратором (рис.3). Для питания микроконтроллера используется бестрансформаторный резистивный источник*. Момент перехода сетевого напряжения через нуль регистрируется с помощью сигнала на аноде стабилитрона, который через резистор, ограничивающий ток, подается непосредственно на вывод порта микроконтроллера.
В схеме управления током нагрузки нет цепи обратной связи, поэтому для установки требуемого значения мощности используется переменный резистор, т.е. здесь реализован электронный аналог традиционного механического термостата. Нагрузкой служит резистивный нагреватель. При сетевом питании 220 В действующее значение тока составляет 5 А. Симистор следует выбирать на большее значение рабочего тока и устанавливать на теплоотвод. В предлагаемой схеме используется симистор BTA208-600F фирмы Philips.
Для оцифровки значения сопротивления переменного резистора, регулирующего мощность, используется интегрирующий преобразователь на базе конденсатора С6, а для стабилизации задающего напряжения применен стабилитрон D4 на напряжение 3 В. В начале цикла преобразования вывод GP1 микроконтроллера настраивается на вывод сигнала, и на нем устанавливается высокий уровень напряжения, которое заряжает конденсатор. Далее вывод конфигурируется как вход компаратора. Конденсатор начинает разряжаться через переменный резистор, причем время разрядки пропорционально значению сопротивления резистора. В момент, когда напряжение на конденсаторе падает до внутреннего опорного напряжения микроконтроллера, равного 0,6 В, срабатывает компаратор, который и фиксирует время разрядки. Значение сопротивления переменного резистора рассчитывается по формуле:
t = -(RPOT1 + R12)·C6·ln(VREF / Vz),
где t — время разрядки конденсатора, RPOT1 — сопротивление переменного резистора, VREF — внутреннее опорное напряжение (0,6 В), VZ — напряжение на стабилитроне (3 В).
В устройстве используется переменный резистор с сопротивлением 25 кОм и линейной зависимостью сопротивления от угла поворота регулирующего движка. Время разрядки конденсатора лежит в пределах 3,53-7,56 мс, время полной разрядки должно быть меньше 10 мс, так как необходимо, чтобы работа микроконтроллера была синхронизирована с сетью. Диаграмма работы преобразователя представлена на рис.4.
Борьба с шумами
Представленная на рис.3 схема цифрового термостата предполагает идеальное сетевое питание. Но в реальной сети существуют достаточно сильные помехи, которые могут сказаться на работе микроконтроллера. Особенно опасны шумы мегагерцевого диапазона, амплитуда которых может достигать десятков киловольт. Если при разработке схемы учесть этот факт и принять ряд несложных мер по изоляции микроконтроллера от высокочастотных шумов, то удастся сэкономить много сил и времени при отладке. На рис.5 представлена модификация схемы с учетом данных рекомендаций.
Первое, на что следует обратить внимание, — наличие фильтра в цепи питания микроконтроллера (C3, R4 и R5). Выполняются отдельные заземления цифровой части схемы и зашумленной аналоговой. И во-вторых, выводы микроконтроллера защищены фильтрами низкой частоты (GP2, GP3), которые рекомендуется выполнять на основе керамических конденсаторов.
Программное обеспечение
Для управления электронным термостатом предлагается алгоритм работы. Основной цикл программы — отслеживание перехода сетевого напряжения через нуль. При регистрации этого перехода решается вопрос открытия симистора в данный полупериод. Для открытия симистора на вывод GP2 контроллера выдается импульс длительностью порядка 2 мс.
Преобразование значения сопротивления переменного резистора привязано к определенным полупериодам сетевого напряжения. Во время положительного полупериода происходит зарядка конденсатора, во время отрицательного — непосредственно преобразование. Временные параметры интегрирующей цепи выбираются на основе частоты питающего напряжения (см. формулу). Время разрядки конденсатора измеряется таймером 0.
Управление мощностью осуществляется путем пропуска периодов сетевого напряжения: полный цикл составляет 10 полупериодов — т.е. число полупериодов, во время которых нагрузка запитывается пропорционально значению сопротивления задающего резистора. Если это сопротивление не равно нулю, зажигается светодиод и таймер запускается на два часа. Повторный запуск таймера происходит при смене задающего значения сопротивления. По прошествии двух часов нагрузка отключается и включается лишь после сброса питания или задания нового уровня мощности.
Программное обеспечение занимает порядка 130 ячеек памяти программ и использует 10-байт ОЗУ.
Полученный электронный термостат имеет следующие преимущества перед механическим аналогом:
· повышенная надежность, обусловленная практически полным отсутствием механических деталей;
· наличие встроенных средств защиты, таких как таймер автоматического отключения;
· индикация рабочего режима;
· гибкость схемы, предусматривающей внутрисхемное программирование микроконтроллера и получение на основе одного и того же конструктива устройств с различной функциональностью;
· повышенная точность и возможность работы при малых уровнях мощности.
Следует отметить, что предложенная система может быть доработана путем введения следующих функций:
· обратной связи по температуре и реализации несложного закона поддержания и регулировки температуры;
· самокалибровки;
· дистанционного управления устройством, например по инфракрасному или радиоканалу;
· фазового управления для регулировки тока ламп накаливания.
На основе предложенной схемы возможна реализация целой гаммы несложных устройств управления сетевым питанием, которые могут применяться в бытовой технике, осветительных приборах, в промышленности и сельском хозяйстве.
Тиристорные регуляторы мощности ТРМ отечественного производства МЕАНДР
Не секрет, что полупроводниковые приборы обладают одним из самых высоких КПД и высокой надежностью в эксплуатации. На данный момент цена на них существенно снизилась, а функционал вырос, что делает продукцию на полупроводниках отличным решением для промышленных объектов и систем процессов автоматизации производств.
Представляем разработанные и изготовленные нами Тиристорные регуляторы мощности ТРМ-1М, ТРМ-2М и ТРМ-3М. Приборы представляют собой силовое полупроводниковое устройство с помощью которого возможно менять выходную мощность от 6% до 94% с различной дискретностью. В качестве нагрузки возможны: различные тэны, инфракрасные нагреватели, лампы освещения, трансформаторы и т.д.
Основные преимущества:
— ЦЕНА!
— габариты исполнения (на сегодняшний момент одни из самых компактных вариантов подобного рода устройств)
— индикация выходной мощности, тока, напряжения на ярком контрастном трех разрядном дисплее (постоянный контроль выходных значений позволит on-line контролировать производственный процесс)
— 5 способов управления тиристорами в одном регуляторе (управляется программно, что расширяет сферу использования одной и той же модели, делая прибор абсолютно универсальным)
— линейная зависимость выходного напряжения или мощности от входного сигнала (в результате 100% контроль за напряжением или мощностью подаваемым в нагрузку)
— отдельное программируемое реле (еще больше автоматизирует процесс производственного цикла)
— защита от короткого замыкания в нагрузке с помощью быстродействующего предохранителя (почти всегда на складе есть запасные).
ТРМ-1М представляет собой однофазный регулятор с возможностью внешнего управления посредством: токовой петли (4-20mA, 0-20mA), напряжением (0-10В,0-5В и т.д.), потенциометра (10-50кОм), сухой контакт, по протоколу Modbus через RS485 интерфейс. Также есть возможность задания и просмотра параметров на лицевой панели.
Являясь полностью цифровым устройством, возможности изменяемых параметров достаточно обширны.
ТРМ-2М и ТРМ-3М представляют собой двух- и трехфазные регуляторы соответственно.
Существуют 2 основных метода управления тиристорами
Фазовое управление тиристором | Числоимпульсное управление тиристором | ||
Применение | тэны, трансформаторы, инфракрасные нагреватели, лампы накаливания (освещение) | Применение | конденсаторные установки, тэны |
Плюсы | — плавность регулировки — возможность плавного пуска — работа с малоинерционной нагрузкой | Плюсы | — отсутствие импульсных помех — отсутствие искажения формы тока |
Минусы | — импульсные помехи — нелинейные искажения формы тока | Минусы | — отсутствие плавной регулировки — не работает с индуктивной нагрузкои и освещением — отсутствие плавного запуска |
Вывод: данный метод расчитан для регулирования первичной обмотки транформаторов, тэнов с малым инерционным запасом (ламп нагрева, инфракрасных ламп, освещения). | Вывод: данный метод расчитан на чисто активную (резистивную) нагрузку, тэны с достаточным временем инерции. | ||
Однофазные тиристорные ключи с фазовым управлением
Основные варианты силовых однофазных бесконтактных коммутирующих и регулирующих устройств (БКРУ) показаны на рис. 10.1. Включение управляемых вентилей осуществляется сигналом, синхронизированным с напряжением сети. Напряжение на нагрузке регулируется за счет изменения угла задержки (управления) включения , регулируемого от момента прохождения через нуль тока нагрузки (от угла нагрузки).
Схема рис. 10.1, а является наиболее распространенной и базовой при построении трехфазных схем БКРУ. Каждый из тиристоров работает поочередно на интервале одной полуволны, коммутируя соответствующую полуволну напряжения . Максимальные значения прямого и обратного напряжений на тиристоре равны , где – действующее значение питающего напряжения. Среднее значение тока через тиристор равно , где – действующее значение тока нагрузки.
В ряде случаев вместо тиристоров для управления двигателем может быть использован симистор (рис. 10.1, б). Однако при этом весь ток нагрузки протекает по вентилю и средний ток симистора равен:. Кроме того, у симисторов величина в несколько раз ниже, чем у тиристоров, что затрудняет их использование в реверсивных схемах.
Схема рис. 10.1, в аналогична схеме рис. 10.1, а. По тиристору протекает весь ток нагрузки и . Максимальное значение прямого напряжения на нем такое же, как в схеме рис. 10.1, а. Однако здесь тиристор практически защищен от действия обратного напряжения включением неуправляемых вентилей. Тиристор коммутирует обе полуволны напряжения , поэтому частота импульсов управления должна быть в два раза выше частоты питающей сети.
В схеме рис. 10.1, г используются дополнительные диоды, включенные встречно-параллельно тиристорам, в связи с чем обратное напряжение на тиристорах в процессе работы близко к нулю. Это позволяет облегчить требования к выбору тиристоров по
напряжению, так как выбор будет проводиться только по максимальному значению прямого напряжения. Ток нагрузки соответствующего направления протекает в данной схеме через последовательно включенные тиристор и диод. Кривая обратного напряжения на диоде при регулировании имеет тот же вид, что и кривая обратного напряжения одноименного тиристора в схеме рис. 10.1, а.
Рассмотрим особенности работы БКРУ на обмотку машины переменного тока. Очень часто для приближенных расчетов тиристоры представляются идеальными вентилями, а машина переменного тока – в виде активно-индуктивной нагрузки. При этом не учитывается изменение параметров машины при регулировании ее скорости и ЭДС взаимоиндукции между различными фазами статора и ротора. Однако такой подход значительно упрощает исследования, позволяет получить универсальные расчетные соотношения, а также легко произвести качественный анализ различных схем.
Сначала рассмотрим процессы, возникающие при работе одного тиристора VS1 на фазу двигателя переменного тока, представляющую последовательное соединение активного сопротивления фазы и индуктивности Lн (рис. 10.2, а). В момент подачи отпирающих импульсов αот (рис. 10.2, б, в) через тиристор нарастает ток нагрузки до максимального значения iмакс, после чего он поддерживается за счет энергии, накопленной в индуктивности . Закрытие тиристора происходит при угле . Длительность протекания тока через тиристор ха
рактеризуется углом проводимости
.
Для удобства расчета иногда целесообразно использовать дополнительный угол проводимости:
.
Форма тока в нагрузке находится из решения дифференциального уравнения, составленного для активно-индуктивной цепи переменного тока.
При включении вентиля VS1 (рис. 10.2, а) ток нагрузки в общем случае содержит принужденную (периодическую) и свободную (апериодическую) составляющие. При свободная составляющая отсутствует и (рис. 10.2, б), фазовый угол нагрузки определяется из соотношения:
.
Как указывалось, наиболее часто применяется схема с встречно-параллельным включением тиристоров (см. рис. 10.1, а). Особенностью такого включения по сравнению со схемой рис. 10.2, а является зависимость от фазового угла нагрузки () не только угла закрытия (), но и угла открытия (). При включении активной нагрузки () на напряжение угол проводимости вентиля . Ток через
нагрузку является прерывистым (рис. 10.3, а). Диапазон изменения . При ток становится непрерывным синусоидальным.
При активно-индуктивной нагрузке и (рис. 10.3, б) длительность протекания тока , и он является прерывистым. Тиристор вступает в работу, когда предыдущий тиристор уже закрыт. Когда (рис. 10.3, в), для каждого тиристора , и последующий тиристор вступает в работу как раз в тот момент, когда закрывается предыдущий. Свободная составляющая тока отсутствует, и по нагрузке протекает непрерывный синусоидальный ток . Если , открытие тиристора невозможно, так как при этом встречный тиристор проводит ток и создает обратное напряжение на включаемом тиристоре. Поэтому максимальный диапазон изменения . При чисто индуктивной нагрузке этот диапазон равен .
Из рис. 10.3, а видно, что даже при активной нагрузке первая гармоника тока при регулировании отстает от напряжения сети на угол Следовательно, тиристорное устройство из встречно-параллельных тиристоров по отношению к сети ведет себя как нелинейное реактивное (индуктивное) сопротивление, что приводит к снижению коэффициента мощности сети. Коэффициент мощности повышают при , а ток и напряжение в нагрузке регулируют, изменяя угол запирания тиристоров. Такой способ регулирования осуществляют, применяя полностью управляемые силовые элементы или принудительную коммутацию тиристоров.
При значения тока и напряжения равны в различные полупериоды сетевого напряжения. Такой способ управления называется симметричным. При несимметричном управлении . Напряжение и ток нагрузки помимо нечетных содержат четные гармоники и постоянную составляющую, направление которой определяется знаком разности указанных углов открытия. Для машин переменного тока этот режим раб
Путаница со срабатыванием TRIAC и точкой пересечения нуля
Практическое обсуждение переключения при нулевом напряжении и переключении фаз с использованием TRIAC в цепи переменного тока 230 В, 50 Гц. Детали не важны, постарайтесь увидеть общую картину.
У старой лампочки на 230 В и 100 Вт сопротивление нити накала составляет около 40 Ом при комнатной температуре. Подключите к лампочке сеть переменного тока напряжением 230 В, и она будет потреблять / пропускать более 5 А, что означает, что номинальная мощность лампы превышает 1 000 Вт.
Нить накала лампы при полном включении работает при 2 500 ° C, что увеличивает сопротивление до более чем 500 Ом, поэтому ток падает до менее ½ ампер. Сколько времени нужно, чтобы нить накала достигла этой температуры? Быстрее, чем может видеть глаз!
Для нити накала нехорошо получить такой тепловой удар, и один из способов уменьшить его — дать больше времени для прогрева при включении.
Если бы мы были достаточно быстрыми, мы могли бы дождаться сетевого цикла и, когда он пройдет через ноль, быстро включить переключатель, но TRIAC достаточно быстр.При переключении вблизи точки пересечения нуля напряжение приближается к нулю, поэтому ток близок к нулю, и это помогает уменьшить переключающий шум или электромагнитные помехи, а также тепловой удар в некоторых случаях, например, нить накала в лампочке.
Но даже при переключении на ноль нить накала получит возрастающее напряжение от 0 до 325 вольт за 5 миллисекунд! Это намного лучше, чем удар около пикового напряжения, но есть способ получше. Что, если бы вы могли подать только 10 вольт на короткое время, затем 20 вольт на короткое время и постепенно увеличивать напряжение, чтобы у вас было гораздо больше времени для нагрева нити?
Это один из примеров, когда может пригодиться фазовый контроль.TRIAC может включиться, когда на нем есть напряжение и через него может протекать ток. Если ток прекратится, TRIAC выключится. Вот что происходит в точке пересечения нулевого уровня сети. Ток падает до нуля, когда напряжение переключает полярность, и TRIAC выключается сам по себе.
Теперь, когда мы знаем, как его выключить, когда он включается, чтобы медленно повышать напряжение на нагрузке? Если вы хотите, чтобы на нагрузке было только 10 вольт, подождите, пока сетевое напряжение не упадет до нуля, и когда оно достигнет 10 вольт до нуля, активируйте TRIAC.Он будет оставаться включенным в течение очень короткого времени, потому что напряжение быстро падает до нуля, после чего TRIAC отключится.
Поскольку напряжение растет в противоположной полярности, не включайте (первые) 10 вольт, это слишком рано. Подождите, пока напряжение поднимется и упадет, и незадолго до того, как оно достигнет нуля, снова включите его. Если вы включите такую лампочку, она почти не загорится, но будет медленно увеличивать напряжение, при котором вы запускаете TRIAC, и он будет работать все дольше и дольше. Это то, что делают большинство диммеров.
Уловка состоит в том, чтобы вычислить положение включения перед следующей точкой пересечения нуля. На практике вы используете таймер, а не напряжение. Возьмем 16-битный таймер с тактовой частотой 2 МГц, что является обычным для современных микроконтроллеров.
Один полупериод при 50 Гц составляет 10 миллисекунд, и за это время таймер отсчитает до 20 000, после чего произойдет следующее пересечение нуля. Для фазового управления точкой запуска является количество отсчетов до достижения 20 000. Есть несколько способов сделать это.Один простой, не всегда идеальный метод — использовать переполнение счетчика для генерации прерывания и запуска TRIAC в коде прерывания. Это означает, что таймер должен быть предварительно установлен на значение, близкое к полному счету.
Чтобы получить переполнение после 10 000 отсчетов, вычтите 10 000 из полного отсчета (65 536 — 10 000) и предварительно загружайте это значение в таймер при каждом пересечении нуля. Таймер запустит 55 536 и 10 000 отсчетов позже, будет сгенерировано прерывание переполнения.
При превышении емкости 16-битного счетчика формируется перенос, который может быть выбран для запуска прерывания.Прерывание используется для остановки других процессов и немедленной обработки триггера TRIAC, в противном случае, если разрешено запускать другое программное обеспечение, синхронизация триггера TRIAC будет нарушена. Прерывание говорит: «Я должен сделать это быстро, а затем вы можете продолжить то, что делали раньше».
В заключение, TRIAC не часто используются в цепях постоянного тока, потому что ток никогда не прекращается, поэтому выключить TRIAC непросто. Есть исключения, например, схема защиты ломом. TRIAC или SCR находится напротив источника постоянного тока сразу после предохранителя.При срабатывании TRIAC произойдет короткое замыкание питания и быстро сработает предохранитель. Когда предохранитель перегорает, ток прерывается, и TRIAC отключается до того, как он задымлен, и одновременно защищает цепь.
Раньше в цепях постоянного тока были более сложные приложения, но в наши дни проще использовать транзисторы, чем иметь дело со сложностями, связанными с остановкой тока через TRIAC в цепи постоянного тока без отключения постоянного тока.
Ток— Стратегия срабатывания симистора для управления фазой двигателя
Я пытаюсь сконструировать контроллер двигателя гончарного круга на замену старому гончарному кругу.Я решил некоторую проблему и могу управлять эталоном фазы нити накала.
Теперь я пробую свою плату на реальном двигателе, и, как ни странно, плата не работает должным образом. Да, я (заново) обнаружил текущий эффект фазового угла. Я вижу много контроля фазы двигателя , только использует детектор перехода через ноль VOLTAGE основного источника питания и не учитывает ток, я не понимаю, как они работают должным образом.
Чтобы попытаться понять, я пытаюсь изобразить напряжение и фазу тока с запаздыванием на 90 ° на нагрузке.Я использую событие детектора пересечения нуля основного напряжения для запуска TRIAC от> 0 до <10 мс. (для напряжения питания 50 Гц)
1. ТРИГГЕР ПОСЛЕ НУЛЕВОГО ТОКА С большой задержкой (~ 6 мс) после пересечения нуля напряжения я ожидаю немного подать мощность на нагрузку (например, на лампу накаливания), но если я учту ток, я вижу, что TRIAC включен в течение почти всего периода.
2. ТРИГГЕР ПЕРЕД НУЛЕВЫМ ТОКОМ Теперь с небольшой задержкой (~ 4 мс) после пересечения нуля напряжения я ожидаю увеличить мощность нагрузки (например, на лампу накаливания), но опять же, если я учту ток, я вижу, что TRIAC включен только на некоторое время. небольшое время, пока ток не пересечет ноль.Я могу сгенерировать последовательность импульсов, чтобы «пройти» текущее пересечение нуля, но в этом случае TRIAC будет ВЫКЛЮЧЕН ПОСЛЕ следующего импульса, поэтому он будет ВЫКЛЮЧЕН в течение длительного времени до следующего (следующего) импульса, сигнал будет несимметричным.
Итак, вот мой вопрос:
- Как управлять фазой двигателя без знания фазы тока, чтобы можно было управлять светом И двигателем? (Другими словами, почему бы ни в одном диммере не использовать детектор пересечения нуля по току?)
- Нужно ли мне добавить к моей плате детектор пересечения нуля CURRENT или измерить текущую фазу, чтобы иметь возможность сместить задержку моего импульса на текущую фазу.(например: 1: ждать пересечения нуля напряжения, 2: ждать 5 мс (90 °), 3: запускать мой таймер задержки, 4: генерировать импульс стробирования)?
- Я где-то читал фазу движения тока на двигателе в зависимости от скорости и крутящего момента, как обойтись без детектора перехода тока через ноль?
Как видите, я полностью заблудился в стратегии TRIAC, запускающей индуктивную нагрузку, сделайте шаг назад. Заранее спасибо
Узнать | OpenEnergyMonitor
Управление фазой: Максимальная мощность подается на нагрузку, когда симистор работает в течение всего каждого полупериода.Мощность непрерывно (но не линейно) снижается до нуля, когда симистор вообще не проводит. *
Burst Fire: Максимальная мощность передается на нагрузку, когда симистор проводит каждый цикл. По мере того, как проводится меньшее количество циклов, средняя мощность падает ступенчато (в данном случае на 20%). *
Срабатывание (срабатывание) симистора
Для этой задачи существует ряд ИС, которые не только генерируют соответствующий сигнал, но также обеспечивают изоляцию между сетью и управляющей электроникой.Двумя примерами являются MOC3021 для управления фазой и MOC3041 для импульсного огня, как от Fairchild, так и от других производителей.
Драйвер случайной фазы MOC3021 I.C.
Как всегда, технический паспорт дает полную информацию, принципиальную схему приложения, и рекомендуется точно следовать ей. Что касается процессора Arduino, то драйвер очень похож на обычный светодиод. Для ограничения тока требуется последовательный резистор, и его значение можно рассчитать обычным способом, зная мощность привода цифрового выходного вывода Arduino, напряжение, падающее на светодиод, и требуемый ток.Эскиз программного обеспечения должен обеспечивать достаточно длинный импульс в нужный момент в каждом полупериоде, чтобы симистор включался в нужное время.
Драйвер оптоизолятора MOC3041 с нулевым перекрестием I.C.
Опять же, технический паспорт дает полную информацию, принципиальную схему приложения, и рекомендуется точно следовать ей. Опять же, Arduino видит устройство как светодиод, и резистор рассчитывается таким же образом. Однако он отличается от MOC3021 тем, что содержит схему детектора перехода через ноль.Во время работы триггер «заряжается», посылая ему сигнал «включения» в течение предыдущего полупериода, особенно после того, как напряжение поднимается выше 20 В («Запрещающее напряжение» в таблице данных). Теперь программное обеспечение должно смотреть вперед и запускать триггер перехода через ноль через некоторое время после начала предыдущего полупериода. Чтобы исправление не происходило, сигнал «включения» остается включенным до соответствующей точки на один цикл позже, после чего он либо выключается, либо остается включенным, если необходимо.
Падение или мерцание
Любой источник электроэнергии имеет конечный импеданс, свойство кабелей, трансформаторов, распределительного устройства и, в конечном итоге, даже генераторов, составляющих систему. И, как любое полное сопротивление, когда вы потребляете ток, на нем появляется напряжение, которое вызывает падение напряжения питания. Величина провалов напряжения обычно выражается в процентах от нормального напряжения.
Если у вас есть собственное электроснабжение, оно находится под вашим контролем, но в целом это не так, и вы разделяете электроснабжение с кем угодно, от горстки до многих десятков, возможно, сотен соседей.Поэтому каждый раз, когда вы включаете нагрузку, напряжение у всех будет падать и восстанавливаться при выключении нагрузки. Если это происходит неоднократно и часто, это называется мерцанием. Лампы накаливания очень чувствительны к изменению напряжения, световой поток примерно пропорционален V 3,4 , поэтому существуют строгие ограничения, которые определяют максимально допустимое изменение напряжения, которое связано с тем, как часто происходят изменения. [См. Справку] Мерцание — проблема для контроллеров огня очередями.
Гармоники и RFI
Каждый раз, когда симистор включает электрическую цепь, и если предположить, что на симисторе есть напряжение, ток нагрузки возрастает от нуля до некоторого значения за очень короткое время. Величина и скорость изменения определяются нагрузкой, и в случае чистого (или почти такого) сопротивления скорость изменения может быть очень высокой. Результирующий «край» генерирует широкий спектр шума, который может легко распространяться в радиодиапазоны и мешать работе расположенного поблизости электронного оборудования, если не используется надлежащая фильтрация.
В то же время процесс прерывания синусоидальной волны также генерирует гармоники линейной частоты. Если волна прерывается симметрично, будут присутствовать только нечетные гармоники. (Вы можете легко проиллюстрировать обратное в электронной таблице: построите синусоидальную волну, затем добавьте третью гармонику с амплитудой 1 / 3 -ю, пятую гармонику с 1 / 5 -ю амплитуду и т. д. В итоге получается прямоугольная волна.)
Опять же, из-за конечного сопротивления источника питания нагрузка, потребляющая гармонические токи, вызовет искажение волны напряжения, а это, в свою очередь, вызовет токи на этих гармониках во всех других нагрузках, подключенных к системе.Это может вызвать нежелательный нагрев, и, опять же, существуют строгие ограничения на величину тока, который может потребляться при любой данной гармонике. В общем, должен быть включен фильтр, который уменьшит как радиочастотные помехи, так и гармоники, которые вводятся в источник питания. [См. Ссылку]
Гармоники представляют собой серьезную проблему для контроллеров фазового угла и для контроллеров с импульсным возбуждением, если точка переключения значительно смещается от точки перехода через ноль.
Справочные документы и спецификации
Драйвер MOC3021 http: // www.fairchildsemi.com/an/AN/AN-3003.pdf
Драйвер MOC3041 http://www.fairchildsemi.com/ds/MO/MOC3041M.pdf
Гармоники и мерцание — низкочастотная часть спектра электромагнитной совместимости Д-р Филип Д. Слейд, Университет Эксетера
http://www.compliance-club.com/archive/old_archive/990619.html
Коммутация мощности | Машинное проектирование
Технология виртуальной реальности (VR) может повредить нашим чувствам.
Эффект погружения — когда наш опыт в виртуальной среде похож на наш опыт в реальном мире — эффективен, когда мозг интерпретирует сенсорную информацию, чтобы понять, что происходит в виртуальной среде.Это понимание называется нашим восприятием.
В виртуальном мире мозг эффективно функционирует, применяя прошлый опыт для понимания виртуальных объектов. Разработчики виртуальной реальности используют законы физики, чтобы обмануть мозг и заставить его применить эти правила в виртуальной среде.
Восприятие, например, было важной темой в исследованиях виртуальной реальности на протяжении десятилетий. Небо может указывать направление, затенение может обеспечивать глубину, а относительный размер объектов может указывать на расстояние. Исследователи показали, что в условиях, когда среда виртуальной реальности снижает восприятие размера и расстояния, эти недостатки можно уменьшить или компенсировать, усилив присутствие в форме самовосприятия аватара.(Присутствие — это мера того, насколько человек чувствует себя в среде VR.)
Сжатие времени наблюдалось только среди участников, которые первыми играли в игру в виртуальной реальности.UC Santa Cruz
Один фактор, которому уделялось меньше внимания. время. В недавнем эксперименте исследователи разработали эксперимент, чтобы выяснить, почему пользователи теряют счет времени — или восприятие того, сколько времени прошло — во время игры в видеоигры.
Результаты эксперимента, проведенного Грейсоном Малленом, студентом когнитивных наук из Калифорнийского университета в Санта-Круз, при поддержке профессора психологии Николаса Давиденко, были опубликованы в журнале Timing & Time Perception .
Намереваясь узнать, чем отличаются эффекты использования гарнитуры VR во время игры по сравнению с использованием обычного монитора, Маллен разработал игру-лабиринт для обоих форматов. Исследовательская группа набрала 41 студента Калифорнийского университета в Санта-Крус для тестирования игры. В то время как исследователи случайным образом выбирали версию игры, с которой начал каждый ученик, все участники играли в обе игры. Обе версии были по сути одинаковыми, отметили исследователи, но лабиринты в каждой немного различались, так что не было повторения между форматами.
Участникам было приказано прекратить игру, как только они почувствовали, что прошло пять минут. Каждый студент должен был оценить это, основываясь на собственном восприятии течения времени.
В этом эксперименте исследовательская группа интегрировала задачу хронометража в опыт виртуальной реальности и позволила им зафиксировать то, что происходило в данный момент. Исследователи записали фактическое количество времени, которое прошло, когда каждый участник прекратил играть в игру, и это выявило разрыв между восприятием времени участниками и реальностью.
Участники исследования играли в этот лабиринт как в виртуальной реальности, так и на обычных мониторах. Наложенная желтая линия, которая не была показана участникам, иллюстрирует путь к цели.UC Santa Cruz
Исследователи предположили, что если виртуальная реальность мешает нормальному восприятию времени, участники могут быть менее уверены в своей способности отслеживать прохождение время.
Исследование показало, что участники, которые впервые играли в VR-версию игры, играли в среднем 72 человека.6 сек. дольше, прежде чем почувствовать, что прошло пять минут, чем студенты, которые начинали с обычного монитора. Это означает, что студенты играли в VR на 28,5% больше времени, чем они думали, по сравнению с обычными форматами.
Этот эффект, когда время идет быстрее, чем вы думаете, называется «сжатие времени» и наблюдался только среди участников, которые первыми сыграли в VR-игру.
Исследователи пришли к выводу, что если эффекты сжатия времени, наблюдаемые в первом раунде, могут быть перенесены на другие типы опыта виртуальной реальности и более длительные интервалы времени, это может помочь в дальнейшем исследовании того, как работает эффект.
Неблагоприятные эффекты сжатия времени или неспособности заметить течение времени могут включать в себя непреднамеренное проведение чрезмерного количества времени в играх, а также нарушение режима сна, настроения и здоровья игроков, отмечается в документе.
С другой стороны, бывают ситуации, в которых временное сжатие может быть полезным. Исследователи отметили, что виртуальную реальность можно использовать, например, для сокращения продолжительности дальних путешествий или для уменьшения негативного психологического воздействия болезненных медицинских процедур.
Исследователи заявили, что будущие эксперименты могут дать новые идеи, которые помогут дизайнерам.
7.6: TRIAC — Workforce LibreTexts
SCR — это однонаправленные (односторонние) устройства тока, что делает их полезными только для управления постоянным током. Если два тиристора соединены последовательно параллельно, так же, как два диода Шокли были соединены вместе, чтобы сформировать DIAC, у нас есть новое устройство, известное как TRIAC : (рисунок ниже)
Эквивалент TRIAC SCR и условное обозначение TRIAC
Поскольку отдельные тиристоры более гибкие для использования в передовых системах управления, они чаще встречаются в схемах, таких как моторные приводы; TRIAC обычно используются в простых устройствах с низким энергопотреблением, например, в бытовых диммерных переключателях.На рисунке ниже показана простая схема регулятора яркости лампы вместе с цепью фазосдвигающего резистора-конденсатора, необходимой для срабатывания после пика.
TRIAC фазорегулятор мощности
TRIAC печально известны тем, что не запускают симметрично . Это означает, что они обычно не срабатывают при точно таком же уровне напряжения затвора для одной полярности, что и для другой. Вообще говоря, это нежелательно, потому что несимметричное срабатывание приводит к форме волны тока с большим разнообразием гармонических частот.Формы сигналов, которые симметричны выше и ниже их средних осевых линий, состоят только из гармоник с нечетными номерами. Несимметричные сигналы, с другой стороны, содержат гармоники с четными номерами (которые также могут сопровождаться или не сопровождаться гармониками с нечетными номерами).
В интересах уменьшения общего содержания гармоник в энергосистемах, чем меньше и менее разнообразны гармоники, тем лучше — это еще одна причина, по которой отдельные тиристоры предпочитают триАК для сложных мощных схем управления.Один из способов сделать форму сигнала тока TRIAC более симметричным — это использовать устройство, внешнее по отношению к TRIAC, для синхронизации запускающего импульса. DIAC, размещенный последовательно с воротами, отлично справляется с этой задачей: (Рисунок ниже)
DIAC улучшает симметрию управления
Напряжение переключенияDIAC имеет тенденцию быть гораздо более симметричным (одинаковым в одной полярности, чем в другой), чем пороговые значения напряжения срабатывания TRIAC. Поскольку DIAC предотвращает любой ток затвора до тех пор, пока напряжение запуска не достигнет определенного повторяемого уровня в любом направлении, точка срабатывания TRIAC от одного полупериода к следующему имеет тенденцию быть более согласованной, а форма волны более симметричной сверху и снизу. его осевая линия.
Практически все характеристики и рейтинги SCR одинаково применимы к TRIAC, за исключением того, что TRIAC, конечно, двунаправленные (могут обрабатывать ток в обоих направлениях). Больше нечего сказать об этом устройстве, за исключением важной оговорки, касающейся обозначений клемм.
Судя по эквивалентной схеме, показанной ранее, можно подумать, что главные клеммы 1 и 2 взаимозаменяемы. Это не так! Хотя полезно представить TRIAC как состоящий из двух SCR, соединенных вместе, на самом деле он построен из единого куска полупроводникового материала, должным образом легированного и многослойного.Фактические рабочие характеристики могут незначительно отличаться от аналогичной модели.
Это становится наиболее очевидным при сравнении двух простых схемотехнических решений, одна из которых работает, а другая — нет. Следующие две схемы представляют собой вариант схемы диммера лампы, показанной ранее, фазосдвигающий конденсатор и DIAC удалены для простоты. Хотя полученная схема лишена возможности точного управления более сложной версией (с конденсатором и DIAC), она выполняет функцию : (рисунок ниже)
Эта схема с воротами к MT 2 работает.
Предположим, мы должны поменять местами два основных терминала TRIAC. Согласно эквивалентной схеме, показанной ранее в этом разделе, замена не должна иметь никакого значения. Схема должна работать: (рисунок ниже)
Если вентиль переключен на MT 1 , эта схема не работает.
Однако, если эта схема будет построена, обнаружится, что она не работает! Нагрузка не получит питания, симистор вообще не сработает, независимо от того, насколько низкое или высокое значение сопротивления установлено на управляющем резисторе.Ключ к успешному срабатыванию TRIAC — убедиться, что затвор получает ток запуска со стороны главной клеммы 2 схемы (основной клеммы на противоположной стороне символа TRIAC от клеммы затвора). Идентификация терминалов MT 1 и MT 2 должна выполняться по номеру детали TRIAC со ссылкой на технический паспорт или книгу.
Обзор
- A TRIAC действует так же, как два тиристора, подключенных спина к спине для работы в двух направлениях (AC). Элементы управления
- TRIAC чаще встречаются в простых схемах с низким энергопотреблением, чем в сложных схемах большой мощности. В схемах управления большой мощностью, как правило, предпочтение отдается нескольким тиристорам.
- При использовании для управления подачей переменного тока на нагрузку, симисторы часто сопровождаются дискретными входами, подключенными последовательно к их клеммам затвора. DIAC помогает TRIAC стрелять более симметрично (более последовательно от одной полярности к другой).
- Главные клеммы 1 и 2 на TRIAC не взаимозаменяемы.
- Для успешного срабатывания симистора ток затвора должен поступать со стороны главной клеммы 2 (MT 2 ) цепи!
IES5528, интегральная схема фазового управления и запуска симистора для рынка управления питанием от сети
Главная> На рассмотрении> IES5528, интегральная схема управления фазой и триаком для управления питанием от сетиВ ожидании
24 ноября 2009 г.
ES Администратор
IES5528 представляет собой прямую замену OM5428.OM5428 теперь заменяется IES5528 и не должен использоваться в новых конструкциях. IES5528 предназначен для подачи отрицательных импульсов затвора симистора, которые позволяют избежать нечувствительных триггерных квадрантов симистора. Благодаря этому он использует значительно меньший ток питания и, следовательно, уменьшает рассеивание в резисторе питания, позволяя использовать силовые резисторы малой мощности.
IES5528 — это прямая замена OM5428. OM5428 теперь заменяется IES5528 и не должен использоваться в новых конструкциях.IES5528 предназначен для подачи отрицательных импульсов затвора симистора, которые позволяют избежать нечувствительных триггерных квадрантов симистора. Благодаря этому он использует значительно меньший ток питания и, следовательно, уменьшает рассеивание в резисторе питания, позволяя использовать силовые резисторы малой мощности.Кроме того, возможность внешнего конфигурирования IES5528 делает его идеальным для различных приложений управления питанием от сети. IES5528 может быть настроен для управления скоростью двигателя с плавным пуском, чтобы исключить влияние высокого пускового момента, синхронного включения / выключения и пропорционального по времени регулирования температуры.Примеры схем применения, включая контроллер фазы сети, контроллер фазы с плавным пуском, пропорциональный контроллер времени и статический переключатель, доступны в техническом описании.
Другой ключевой особенностью IES5528 является питание от сети через резистор сброса напряжения, что устраняет необходимость в дополнительных схемах питания постоянного тока. В IES5528 также доступна внешняя шина питания постоянного тока для питания датчиков и / или маломощных ИС. Как и другие интегральные схемы, разработанные Hendon Semiconductors, IES5528 разработан для минимизации радиочастотных помех и переходных процессов в питающей сети с переключением тока нагрузки при переходе через ноль.
В целом, IES5528 отличается гибкостью и простотой для реализации фазового управления или переключения с симисторным управлением. Следовательно, предоставление инженерам экономичного решения для управления мощностью и скоростью.
IES5528 доступен в корпусе, соответствующем требованиям SO-16 RoHS.
VFD или Triac Phase Control для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью.Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом. В этом сообщении в блоге представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе регулирования скорости для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2 серии
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью.С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц). При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Частотно-регулируемый привод управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов. Такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что для него требуется трехфазный асинхронный двигатель переменного тока с продолжительной нагрузкой. Если в двигателе имеется тормозной механизм любого типа, он обычно сокращает рабочий цикл.Я видел однофазные частотно-регулируемые приводы на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Способ управления скоростью однофазных асинхронных двигателей переменного тока
Теперь давайте посмотрим на другой метод управления скоростью. Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент.Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока.
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц. Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно падает при падении напряжения на 10 В. Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет.В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости. Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).Oriental Motor использует тахогенераторы с нашими двигателями с регулировкой скорости переменного тока, такими как серии DSC или US2. Тахогенератор, также известный как тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем TRIAC для управления напряжением.Также мы используем полуволновой выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от частотно-регулируемого привода. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с приводом от частотно-регулируемого привода, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.
Еще одно преимущество, представленное в серии DSC, — это вертикальная работа.В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. По мере увеличения скорости увеличивается напряжение тахогенератора. Это заставляет схему управления скоростью думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость.Однако при уменьшении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении позволяет осуществлять контролируемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулировкой скорости с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента скорости двигателя помечена, чтобы показать это.Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы), пожалуйста, обратитесь к пунктирной линии, обозначенной «Допустимый крутящий момент для комбинированного типа».
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Подпишитесь, пожалуйста, в правом верхнем углу страницы!