Изменение направления вращения двигателей постоянного тока
Deprecated: Non-static method Date_TimeZone::getDefault() should not be called statically, assuming $this from incompatible context in /home/carkey/hitech/hardtech/kernel/pear/date/Date.php on line 201
Deprecated: Non-static method Date_TimeZone::isValidID() should not be called statically, assuming $this from incompatible context in /home/carkey/hitech/hardtech/kernel/pear/date/Date.php on line 576
Notice: Undefined offset: 1 in /home/carkey/hitech/hardtech/kernel/common/common/common.class.php on line 343
Notice: Undefined offset: 1 in /home/carkey/hitech/hardtech/kernel/common/common/common.class.php on line 343
Deprecated: mysql_escape_string(): This function is deprecated; use mysql_real_escape_string() instead. in /home/carkey/hitech/hardtech/kernel/common/db/mysql.class.php on line 135
Deprecated: mysql_escape_string(): This function is deprecated; use mysql_real_escape_string() instead.
Deprecated: mysql_escape_string(): This function is deprecated; use mysql_real_escape_string() instead. in /home/carkey/hitech/hardtech/kernel/common/db/mysql.class.php on line 135
Deprecated: mysql_escape_string(): This function is deprecated; use mysql_real_escape_string() instead. in /home/carkey/hitech/hardtech/kernel/common/db/mysql.class.php on line 135
Рассмотрим направления сил, действующих на проводники якоря двигателя при различных направлениях магнитного поля и тока в якоре. Из сравнения этих рисунков можно сделать вывод: чтобы изменить направление вращения двигателя, нужно изменить или направление магнитного поля, или направление тока в якоре. Если одновременно изменить и направление магнитного поля и направление тока в якоре, направление вращения двигателя не изменится.
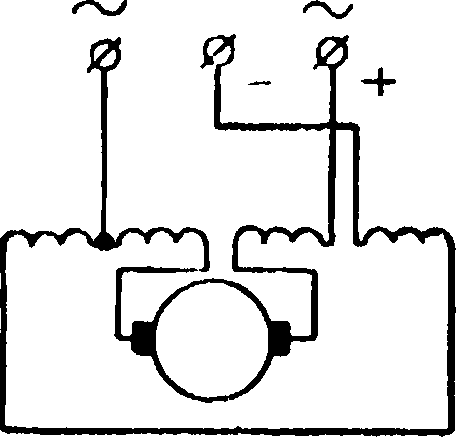 Если изменить полярность питающего напряжения в двигателях с последовательным и параллельным возбуждением, изменятся направления токов в якорях и направления магнитных полей, а направления вращения не изменятся. Чтобы изменить направление вращения двигателя, нужно переключить его обмотку возбуждения. В двигателе с независимым возбуждением обмотка возбуждения питается от отдельного источника. Поэтому, если изменить полярность напряжения, подводимого к якорю, изменится только направление тока в якоре, а направление магнитного поля останется прежним; двигатель будет вращаться в другую сторону. Никаких переключений в двигателе для изменения направления вращения делать не нужно.
Если изменить полярность питающего напряжения в двигателях с последовательным и параллельным возбуждением, изменятся направления токов в якорях и направления магнитных полей, а направления вращения не изменятся. Чтобы изменить направление вращения двигателя, нужно переключить его обмотку возбуждения. В двигателе с независимым возбуждением обмотка возбуждения питается от отдельного источника. Поэтому, если изменить полярность напряжения, подводимого к якорю, изменится только направление тока в якоре, а направление магнитного поля останется прежним; двигатель будет вращаться в другую сторону. Никаких переключений в двигателе для изменения направления вращения делать не нужно.Коллекторные двигатели переменного тока. Из сказанного следует, что двигатели с последовательным или параллельным возбуждением можно питать переменным током: при изменении знака питающего напряжения направление вращения двигателя не изменяется. Однако практически по причинам, на которых мы не останавливаемся, можно питать переменным током только двигатели с последовательным возбуждением.
Интересный факт: в промышленности и строительстве для просушки или быстрого нагрева помещения часто используются электрические тепловые вентиляторы, которые обеспечивают температуру постоянного уровня и считаются наиболее популярными среди других воздушно-отопительных приборов.
Наша продукция
…
Warning: Unknown: write failed: Disk quota exceeded (122) in Unknown on line 0
Warning: Unknown: Failed to write session data (files). Please verify that the current setting of session.save_path is correct (/opt/alt/php56/var/lib/php/session) in Unknown on line 0
Как поменять полярность на электродвигателе
Содержание
- Переподключаем рабочую обмотку
- Переподключаем пусковую намотку
- Меняем пусковую обмотку на рабочую или рабочую на пусковую
Если вы уже подключили асинхронный электродвигатель по схеме, предусматривающей одностороннее вращение, но возникла необходимость реверса, перед вами встает вопрос: как поменять полярность на электродвигателе? Существуют несколько способов изменения направления вращения двигателя.
Переподключаем рабочую обмотку
Для этого можно вскрыть корпус, достать и перевернуть намотку, затем вернуть крышки на место. Но есть более эргономичный вариант, при котором вам не придется разбирать агрегат – достаточно переподключить контакты, которые выходят наружу (это работает только в том случае, если выведены 4 контакта). Итак, от вас требуется:
- Отключить двигатель.
- Определить, какая пара выводов соответствует началу и концу рабочей обмотки (вторая пара принадлежит пусковой обмотке и в данный момент вам не нужна).
- Перекинуть фазу с начального конца обмотки на конечный, а ноль – с конечного конца на начальный (либо наоборот).
В результате этих действий ротор станет вращаться в противоположную сторону, что вам и требовалось.
Переподключаем пусковую намотку
Ваши действия аналогичны тем, что описаны в предыдущем варианте, только местами меняются начало и конец пусковой обмотки. Это также можно сделать, не прибегая к вскрытию корпуса.
Таким образом начало и конец пусковой обмотки меняются местами, что изменяет направление вращения двигателя.
Меняем пусковую обмотку на рабочую или рабочую на пусковую
Во многих моделях моторов наружу выходят только 3 вывода. Это сделано для того, чтобы обезопасить агрегат от поломки, вызванной вмешательством в его работу. Но и в этом случае вы можете заставить двигатель вращаться в другую сторону при соблюдении следующих условий:
- Длина и площадь поперечного сечения рабочей и пусковой обмоток должны быть одинаковыми.
- Провода выполнены из одного и того же материала.
Эти данные влияют на сопротивление, которое должно оставаться постоянным. При смене полярности в случае, если длина или площадь сечения проводов не совпадают, сопротивление пусковой намотки станет таким же, как было у рабочей (или наоборот).![]()
Имейте в виду, КПД электродвигателя снизится, а его эксплуатация в рабочем режиме должна быть непродолжительной, иначе неизбежен перегрев агрегата с последующим выходом из строя.
Чтобы сделать реверс, не разбирая устройство, вам необходимо:
- Снять конденсатор с начального вывода пусковой обмотки.
- Подсоединить его к конечному выводу рабочей обмотки.
- Пустить отводки от обоих этих выводов и фазы.
При такой схеме для вращения двигателя в одну сторону (например, по часовой стрелке) следует подключить фазу к отводку конца рабочей обмотки. Для вращения ротора в противоположную сторону нужно перекинуть фазный провод на отводок начала пусковой обмотки. Соединять и разъединять провода можно вручную, но лучше использовать ключ.
Если предусматривается продолжительный рабочий период мотора, этим способом пользоваться не следует. Вскройте корпус двигателя и осуществите переподключение способом, описанным в первом или втором пунктах. В этом случае КПД агрегата не снизится.
В этом случае КПД агрегата не снизится.
Всех этих манипуляций можно избежать, если изначально при подключении электродвигателя предусмотреть возможность реверсирования и установить кнопочный пост переключения.
Как изменить направление вращения электродвигателя. Как изменить вращение асинхронного электродвигателя
Направление движения вращающегося магнитного поля асинхронных электродвигателей зависит от порядка подачи фаз, независимо от того как соединены его статорные обмотки – звездой или треугольником. Например, если фазы A, B, C подать на входные клеммы 1, 2 и 3 соответственно, то вращение пойдет (предположим) по часовой стрелке, а если на клеммы 2, 1, и 3, то против нее. Схема подключения через магнитный пускатель избавит вас от необходимости откручивать гайки в клеммной коробке и производить физическую перестановку проводов.
Трехфазные асинхронные машины на 380 вольт принято подключать магнитным пускателем, в котором три контакта находятся на одной раме и замыкаются одновременно, подчиняясь действию так называемой втягивающей катушки – магнитного соленоида, работающего как от 380, так и от 220 вольт. Это избавляет оператора от близкого контакта с токоведущими частями, что при токах свыше 20 ампер может быть небезопасно.
Это избавляет оператора от близкого контакта с токоведущими частями, что при токах свыше 20 ампер может быть небезопасно.
Для реверсивного пуска используется пара пускателей. Клеммы питающего напряжения на входе соединяются по прямой схеме: 1–1, 2–2, 3–3. А на выходе встречно: 4–5, 5–4, 6–6. Чтобы избежать короткого замыкания при случайном одновременном нажатии двух кнопок «Пуск» на пульте управления, напряжение на втягивающие катушки подается через дополнительные контакты противоположных пускателей. Так, чтобы при замкнутой основной группе контактов линия, которая идет на соленоид соседнего прибора, была разомкнута.
На пульте управления устанавливается трехкнопочный пост с однопозиционными – одно действие за одно нажатие – кнопками: одна «Стоп» и две «Пуск». Разводка проводов в нем следующая:
- один фазный провод подается на кнопку «Стоп» (она всегда нормально замкнута) и перемычками с нее на кнопки «Пуск», которые всегда нормально разомкнуты.
- С кнопки «Стоп» два провода на дополнительные контакты пускателей, которые при их срабатывании замыкаются.

- С кнопок «Пуск» перекрестно по одному проводу на дополнительные контакты пускателей, которые при их срабатывании размыкаются.
Подробнее о схемах подключения магнитных пускателей для трехфазных электродвигателей читайте .
Реверс однофазных синхронных машин
Для запуска этим моторам необходима вторая обмотка на статоре, в цепь которой включен фазосдвигающий элемент, обычно бумажный конденсатор. Реверсировать можно только те, у которых обе статорных обмотки равнозначны – по диаметру провода, числу витков, а также при условии, что одна из них не отключается после набора оборотов.
Суть схемы реверсирования в том, что фазосдвигающий конденсатор будет подключаться то к одной из обмоток, то к другой. Для примера рассмотрим асинхронный однофазный двигатель АИРЕ 80С2 мощностью 2,2 кВт.
В его клеммной коробке шесть резьбовых выводов, обозначенных литерами с цифрами W2 и W1, U1 и U2, V1 и V2. Чтобы двигатель вращался по часовой стрелке, коммутация производится следующим образом:
- Сетевое напряжение подается на клеммы W2 и V1.

- Концы одной обмотки соединяются с клеммами U1 и U2. Чтобы ее запитать, они соединяются перемычками по схеме U1–W2 и U2–V1.
- Концы второй обмотки подключают к клеммам W2 и V2.
- Фазосдвигающий конденсатор подключают к клеммам V1 и V2.
- Клемма W1 остается свободной.
Чтобы вращение происходило против часовой стрелки, изменяют положение перемычек, они ставятся по схеме W2–U2 и U1– W1. Схема автоматического реверса строится так же на двух магнитных пускателях и трех кнопках – двух нормально разомкнутых «Пуск» и одной нормально замкнутой «Стоп».
Реверс коллекторных двигателей
Схема включения его обмоток аналогична той, что используется в двигателях постоянного тока с последовательным возбуждением. Одна токоснимающая щетка коллектора подключается к обмотке статора, а питающее напряжение подается на другую щетку и второй вывод статорной обмотки.
При изменении положения штепсельной вилки в розетке происходит одновременная переполюсовка магнитов ротора и статора. Поэтому направление вращения не изменяется. Так же, как это происходит в двигателе постоянного тока при одновременном изменении полярности питающего напряжения на обмотке возбуждения и якоря. Изменить порядок следования фаза – ноль надо только в одном элементе электрической машины – коллекторе, который обеспечивает не только пространственное, но электрическое разделение проводников – обмотки якоря изолированы друг от друга. На практике это выполняется двумя способами:
Поэтому направление вращения не изменяется. Так же, как это происходит в двигателе постоянного тока при одновременном изменении полярности питающего напряжения на обмотке возбуждения и якоря. Изменить порядок следования фаза – ноль надо только в одном элементе электрической машины – коллекторе, который обеспечивает не только пространственное, но электрическое разделение проводников – обмотки якоря изолированы друг от друга. На практике это выполняется двумя способами:
- Физической переменой места установки щеток. Это нерационально, поскольку связано с необходимостью внесения изменений в конструкцию устройства. Кроме того, приводит к преждевременному выходу щеток из строя, поскольку форма выработки на их рабочем конце не совпадает с формой поверхности коллектора.
- Изменением положения перемычки между щеточным узлом и обмоткой возбуждения в клеммной коробке, а также точки подключения сетевого провода. Можно реализовать с помощью одного многопозиционного выключателя или двух магнитных пускателей.

Не забудьте, что все работы по перестановке перемычек в клеммной коробке или подключению схемы реверсирования должны проводиться при полностью снятом напряжении.
Из большого числа типов электродвигателей переменного тока, применяющихся в современной электротехнике, наиболее широко распространенным, удобным и экономичным является двигатель с вращающимся магнитным полем, основанный на применении трехфазного тока.
Чтобы понять основную идею, лежащую в основе конструкции этих двигателей, вернемся снова к опыту, изображенному на рис. 264. Мы видели там, что металлическое кольцо, помещенное во вращающееся магнитное поле, приходит во вращение в ту же сторону, в какую вращается поле. Причиной этого вращения является то обстоятельство, что при вращении поля изменяется магнитный поток через кольцо и при этом в кольце индуцируются токи, на которые поле действует с уже знакомыми нам силами, создающими вращающий момент.
При
наличии трехфазного тока, т. е. системы трех токов, сдвинутых по фазе друг
относительно друга на (треть периода), очень легко
получить вращающееся магнитное поле без механического вращения магнита и без
всяких дополнительных устройств. Рис. 351,а показывает, как это осуществляется.
Мы имеем здесь три надетые на железные сердечники катушки, расположенные друг
относительно друга под углом 120°. Через каждую из этих катушек проходит один
из токов системы, составляющей трехфазный ток. В катушках создаются магнитные
поля, направления которых отмечены стрелками . Магнитная индукция же каждого из
этих полей изменяется с течением времени по тому же синусоидальному закону, что
и соответствующий ток (рис. 351,б). Таким образом, магнитное поле в
пространстве между катушками представляет собой результат наложения трех
переменных магнитных полей, которые, с одной стороны, направлены под углом 120°
друг относительно друга, а с другой стороны, смещены по фазе на . Мгновенное
значение результирующей магнитной индукции представляет собой векторную сумму
трех составляющих полей в данный момент времени:
Рис. 351,а показывает, как это осуществляется.
Мы имеем здесь три надетые на железные сердечники катушки, расположенные друг
относительно друга под углом 120°. Через каждую из этих катушек проходит один
из токов системы, составляющей трехфазный ток. В катушках создаются магнитные
поля, направления которых отмечены стрелками . Магнитная индукция же каждого из
этих полей изменяется с течением времени по тому же синусоидальному закону, что
и соответствующий ток (рис. 351,б). Таким образом, магнитное поле в
пространстве между катушками представляет собой результат наложения трех
переменных магнитных полей, которые, с одной стороны, направлены под углом 120°
друг относительно друга, а с другой стороны, смещены по фазе на . Мгновенное
значение результирующей магнитной индукции представляет собой векторную сумму
трех составляющих полей в данный момент времени:
.
Если
мы теперь станем искать, как изменяется со временем результирующая магнитная
индукция ,
то расчет показывает, что по модулю магнитная индукция результирующего поля не
изменяется (
сохраняет постоянное значение), но направление вектора равномерно
поворачивается, описывая полный оборот за время одного периода тока.
Рис. 351. Получение вращающегося магнитного поля при сложении трех синусоидальных полей, направленных под углом 120° друг относительно друга и смещенных по фазе на : а) расположение катушек, создающих вращающееся поле; б) график изменения индукции полей со временем; в) результирующая индукция постоянна по модулю и за периода поворачивается на окружности
Не входя в подробности расчета, поясним, каким образом сложение трех полей дает постоянное по модулю вращающееся поле. На рис. 351,б стрелками отмечены значения магнитной индукции трех полей в момент , когда , в момент , когда , и в момент , когда , а на рис. 351,в выполнено сложение по правилу параллелограмма магнитных индукций и в эти три момента, причем направления стрелок и , и , и соответствуют рис. 351,а. Мы видим, что результирующая магнитная индукция имеет во все три указанных момента один и тот же модуль, но направление ее поворачивается за каждую треть периода на одну треть окружности.
Если
в такое вращающееся поле поместить металлическое кольцо (или, еще лучше,
катушку), то в нем будут индуцироваться токи так же, как если бы кольцо
(катушка) вращалось в неподвижном поле. Взаимодействие магнитного поля с этими
токами и создает силы, приводящие во вращение кольцо (катушку). В этом
заключается основная идея трехфазного двигателя с вращающимся полем, впервые
осуществленного М. О. Доливо-Добровольским.
Взаимодействие магнитного поля с этими
токами и создает силы, приводящие во вращение кольцо (катушку). В этом
заключается основная идея трехфазного двигателя с вращающимся полем, впервые
осуществленного М. О. Доливо-Добровольским.
Устройство такого двигателя ясно из рис. 352. Его неподвижная часть – статор – представляет собой собранный из листовой стали цилиндр, на внутренней поверхности которого имеются пазы, параллельные оси цилиндра. В эти пазы укладываются провода, соединяющиеся между собой по торцовым сторонам статора так, что они образуют три повернутые друг относительно друга на 120° катушки, о которых шла речь в предыдущем параграфе. Начала этих катушек 1, 2, 3 и концы их 1″, 2″, 3″ присоединены к шести зажимам, находящимся на щитке, укрепленном на станине машины. Расположение зажимов показано на рис. 353.
Рис. 352. Трехфазный двигатель переменного тока в разобранном виде: 1 – статор, 2 – ротор, 3 – подшипниковые щитки, 4 – вентиляторы, 5 – вентиляционные отверстия
Рис. 353. Расположение зажимов на
щитке двигателя
353. Расположение зажимов на
щитке двигателя
Внутри статора помещается вращающаяся часть двигателя – его ротор. Это – также набранный из отдельных листов стали цилиндр, укрепленный на валу, вместе с которым он может вращаться в подшипниках, находящихся в боковых щитках (крышках) двигателя. На краях этого цилиндра имеются вентиляционные лопасти, которые при вращении ротора создают в двигателе сильную струю воздуха, охлаждающую его. На цилиндрической поверхности ротора, в пазах, параллельных его оси, расположен ряд проводов, соединенных кольцами на торцах цилиндра. Такой ротор, изображенный отдельно на рис. 354, носит название «короткозамкнутого» (иногда его называют «беличьим колесом»). Он приходит во вращение, когда в пространстве внутри статора возникает вращающееся магнитное поле.
Рис. 354. Короткозамкнутый ротор трехфазного двигателя
Вращающееся
поле создается трехфазной системой токов, подводимых к обмоткам статора,
которые могут быть соединены между собой либо звездой (рис. 355), либо
треугольником (рис. 356). В первом случае (§ 170) напряжение на каждой обмотке
в раз
меньше линейного напряжения сети, а во втором – равно ему. Если, например,
напряжение между каждой парой проводов трехфазной сети (линейное напряжение) равно
220 В, то при соединении обмоток треугольником каждая из них находится под
напряжением 220 В, а если они соединены звездой, то каждая обмотка находится
под напряжением 127 В.
355), либо
треугольником (рис. 356). В первом случае (§ 170) напряжение на каждой обмотке
в раз
меньше линейного напряжения сети, а во втором – равно ему. Если, например,
напряжение между каждой парой проводов трехфазной сети (линейное напряжение) равно
220 В, то при соединении обмоток треугольником каждая из них находится под
напряжением 220 В, а если они соединены звездой, то каждая обмотка находится
под напряжением 127 В.
Рис. 355. Включение обмоток статора звездой: а) схема включения двигателя; б) соединение зажимов на щитке. Зажимы 1″, 2″, 3″ соединены «накоротко» металлическими шинами; к зажимам 1, 2, 3 присоединены провода трехфазной сети
Рис. 356. Включение обмоток статора треугольником: а) схема включения двигателя; б) соединение зажимов на щитке. Металлическими шинами соединены зажимы 1 и 3″, 2 и 1″, 3 и 2″; к зажимам 1, 2, 3 присоединены провода трехфазной сети
Таким
образом, если обмотки двигателя рассчитаны на напряжение 127 В, то двигатель
может работать с нормальной мощностью как от сети 220 В при соединении его
обмоток звездой, так и от сети 127 В при соединении его обмоток треугольником. На
табличке, прикрепленной к станине каждого двигателя, указываются поэтому два
напряжения сети, при которых данный двигатель может работать, например 127/220
В или 220/380 В. При включении в сеть с меньшим линейным напряжением обмотки
двигателя соединяют треугольником, а при питании от сети с более высоким
напряжением их соединяют звездой.
На
табличке, прикрепленной к станине каждого двигателя, указываются поэтому два
напряжения сети, при которых данный двигатель может работать, например 127/220
В или 220/380 В. При включении в сеть с меньшим линейным напряжением обмотки
двигателя соединяют треугольником, а при питании от сети с более высоким
напряжением их соединяют звездой.
Вращающий
момент двигателя создается силами взаимодействия магнитного поля и токов,
индуцируемых им в роторе, а сила этих токов (или соответствующая э. д. с.)
определяется относительной частотой вращения поля по отношению к ротору,
который сам вращается в ту же сторону, что и поле. Поэтому, если бы ротор
вращался с той же частотой, что и поле, то никакого относительного движения их
не было бы. Тогда ротор находился бы в покое относительно поля и в нем не
возникала бы никакая индуцированная э. д. с., т. е. в роторе не было бы тока и
не могли бы возникнуть, силы, приводящие его во вращение. Отсюда ясно, что
двигатель описываемого типа может работать только при частоте вращения ротора,
несколько отличающейся от частоты вращения поля, т. е. от частоты тока. Поэтому
такие двигатели в технике принято называть «асинхронными» (от греческого слова
«синхронос» – совпадающий или согласованный во времени, частица «а» означает
отрицание).
е. от частоты тока. Поэтому
такие двигатели в технике принято называть «асинхронными» (от греческого слова
«синхронос» – совпадающий или согласованный во времени, частица «а» означает
отрицание).
Таким образом, если поле вращается с частотой , а ротор – с частотой , то вращение поля относительно ротора происходит с частотой , и именно этой частотой определяются индуцируемые в роторе э. д. с. и ток.
Величина называется в технике «скольжением». Она играет очень важную роль во всех расчетах. Обычно скольжение выражается в процентах.
Когда
мы включаем в сеть ненагруженный двигатель, то в первые моменты равно или близко
к нулю, частота вращения поля относительно ротора велика и индуцированная в роторе э.
д. с. соответственно также велика – она раз в 20 превосходит ту э. д. с.,
которая возникает в роторе при работе двигателя с нормальной мощностью. Ток в
роторе при этом тоже значительно превосходит нормальный. Двигатель развивает в
момент пуска довольно значительный вращающий момент, и так как инерция его
сравнительно невелика, то частота вращения ротора быстро нарастает и почти
сравнивается с частотой вращения поля, так что относительная частота их
становится почти равной нулю и ток в роторе быстро спадает. Для двигателей
малой и средней мощности кратковременная перегрузка их при пуске не
представляет опасности, при запуске же очень мощных двигателей (десятки и сотни
киловатт) применяются специальные пусковые реостаты, ослабляющие ток в обмотке;
по мере достижения нормальной частоты вращения ротора эти реостаты постепенно
выключают.
Для двигателей
малой и средней мощности кратковременная перегрузка их при пуске не
представляет опасности, при запуске же очень мощных двигателей (десятки и сотни
киловатт) применяются специальные пусковые реостаты, ослабляющие ток в обмотке;
по мере достижения нормальной частоты вращения ротора эти реостаты постепенно
выключают.
По
мере того как возрастает нагрузка двигателя, частота вращения ротора несколько
уменьшается, частота вращения поля относительно ротора возрастает, и вместе с
тем растут ток в роторе и развиваемый двигателем вращающий момент. Однако для
изменения мощности двигателя от нуля до нормального значения требуется очень
небольшое изменение частоты вращения ротора, примерно до 6 % от максимального
значения. Таким образом, асинхронный трехфазный двигатель сохраняет почти
постоянную частоту вращения ротора при очень широких колебаниях нагрузки.
Регулировать эту частоту в принципе возможно, но соответствующие устройства
сложны и неэкономичны и потому на практике применяются очень редко. Если
машины, приводимые в действие двигателем, требуют иной частоты вращения, чем
этот двигатель дает, то предпочитают применять зубчатые или ременные передачи с
различными передаточными числами.
Само собой разумеется, что при возрастании нагрузки двигателя, т. е. отдаваемой им механической мощности, должен возрастать не только ток в роторе, но и ток в статоре для того, чтобы двигатель мог поглощать из сети соответствующую электрическую мощность. Это осуществляется автоматически вследствие того, что ток в роторе также создает в окружающем пространстве свое магнитное поле, воздействующее на обмотки статора и индуцирующее в них некоторую э. д. с. Связь между магнитным потоком ротора и статора, или, как говорят, «реакция якоря», обусловливает изменения тока в статоре и обеспечивает согласование электрической мощности, отбираемой из сети, с механической мощностью, отдаваемой двигателем. Детали этого процесса довольно сложны, и мы в них входить не будем.
Очень
важно, однако, помнить, что хотя недогруженный двигатель и отбирает от сети
такое количество энергии, которое соответствует совершаемой им работе, но при
недогрузке его, когда ток в статоре падает, это обусловлено возрастанием
индуктивного сопротивления статора, т. е. уменьшением коэффициента мощности (§
163), что портит условия эксплуатации сети в целом. Если, например, для работы
станка достаточно мощности 3 кВт, а мы установим на нем мотор 10 кВт, то данное
предприятие почти не понесет ущерба – мотор все равно возьмет только ту
мощность, которая требуется для его работы, плюс потери в самом двигателе. Но
такой недогруженный мотор имеет большое индуктивное сопротивление и уменьшает
коэффициент мощности сети. Он убыточен с точки зрения народного хозяйства в
целом. Чтобы стимулировать борьбу за повышение коэффициента мощности,
организации, отпускающие потребителям электроэнергию, применяют систему штрафов
за слишком низкий по сравнению с установленной нормой коэффициент мощности и
поощрений за его повышение.
е. уменьшением коэффициента мощности (§
163), что портит условия эксплуатации сети в целом. Если, например, для работы
станка достаточно мощности 3 кВт, а мы установим на нем мотор 10 кВт, то данное
предприятие почти не понесет ущерба – мотор все равно возьмет только ту
мощность, которая требуется для его работы, плюс потери в самом двигателе. Но
такой недогруженный мотор имеет большое индуктивное сопротивление и уменьшает
коэффициент мощности сети. Он убыточен с точки зрения народного хозяйства в
целом. Чтобы стимулировать борьбу за повышение коэффициента мощности,
организации, отпускающие потребителям электроэнергию, применяют систему штрафов
за слишком низкий по сравнению с установленной нормой коэффициент мощности и
поощрений за его повышение.
Поэтому при работе с двигателями необходимо твердо соблюдать следующие правила:
1. Необходимо всегда подбирать двигатель такой мощности, какую фактически требует приводимая им в действие машина.
2.
Если нагрузка двигателя не достигает 40 % нормальной, а обмотки статора
включены треугольником, то целесообразно переключить их на звезду. При этом
напряжение на обмотках уменьшается в раз, а намагничивающий ток – почти
в три раза. В тех случаях, когда такое переключение приходится производить
часто, двигатель включают в сеть при помощи перекидного рубильника по схеме,
изображенной на рис. 357. В одном положении рубильника обмотки включены
треугольником, в другом — звездой.
При этом
напряжение на обмотках уменьшается в раз, а намагничивающий ток – почти
в три раза. В тех случаях, когда такое переключение приходится производить
часто, двигатель включают в сеть при помощи перекидного рубильника по схеме,
изображенной на рис. 357. В одном положении рубильника обмотки включены
треугольником, в другом — звездой.
Рис. 357. Схема переключения обмоток двигателя с треугольника (положение рубильника I, I, I) на звезду (положение рубильника II, II, II)
Для того чтобы изменить направление вращения вала двигателя на обратное, необходимо поменять местами два линейных провода, присоединенных к двигателю. Это легко осуществить при помощи двухполюсного переключателя, как показано на рис. 358. Переводя переключатель из положения I-I в положение II-II, мы меняем направление вращения магнитного поля и вместе с тем направление вращения вала двигателя.
Рис. 358. Схема включения для изменения направления вращения трехфазного двигателя
Мы
видели, что при наличии в статоре двигателя трех катушек, смещенных друг
относительно друга на 120°, магнитное поле вращается с частотой тока, т. е.
совершает один оборот за часть секунды, или 3000 оборотов в
минуту. Почти с такой же частотой будет вращаться и вал двигателя. Во многих
случаях такая частота вращения является чрезмерно большой. Чтобы уменьшить ее,
в статоре двигателя размещают не три катушки, а шесть или двенадцать и
соединяют их так, чтобы северные и южные полюсы по окружности статора
чередовались. При этом поле поворачивается за каждый период тока только на
половину или четверть оборота, т. е. вал машины вращается c частотой около 1500 или 750
оборотов в минуту.
е.
совершает один оборот за часть секунды, или 3000 оборотов в
минуту. Почти с такой же частотой будет вращаться и вал двигателя. Во многих
случаях такая частота вращения является чрезмерно большой. Чтобы уменьшить ее,
в статоре двигателя размещают не три катушки, а шесть или двенадцать и
соединяют их так, чтобы северные и южные полюсы по окружности статора
чередовались. При этом поле поворачивается за каждый период тока только на
половину или четверть оборота, т. е. вал машины вращается c частотой около 1500 или 750
оборотов в минуту.
Наконец,
еще одно практически важное замечание. При повреждении (пробое) изоляции
станины и кожухи электрических машин и трансформаторов оказываются под
напряжением относительно Земли. Прикосновение к этим частям машин может при
таких условиях быть опасным для людей. Для предупреждения этой опасности следует
при напряжениях свыше 150 В относительно Земли заземлять станины и кожухи
электрических машин и трансформаторов, т. е. надежно соединять их
металлическими проводами или стержнями с Землей. Это выполняется по специальным
правилам, которые необходимо строго соблюдать во избежание несчастных случаев.
Это выполняется по специальным
правилам, которые необходимо строго соблюдать во избежание несчастных случаев.
Здравствуйте, уважаемые читатели и посетители сайта «Заметки электрика».
В прошлой статье мы говорили про , знакомились со схемой его подключения к электрической сети напряжением 220 (В), обозначением и маркировкой выводов.
В той же статье я обещал Вам в ближайшее время рассказать о том, как можно организовать его реверс, т.е. управлять направлением вращения двигателя дистанционно, а не с помощью перемычек в клеммной коробке.
Итак, приступим.
В принципе ничего сложного нет. Принцип схемы управления аналогичен , за исключением некоторых деталей. Вообще то раньше мне не приходилось сталкиваться со схемой реверса однофазных двигателей, и данная схема была воплощена мною на практике впервые.
Суть схемы сводится к изменению направления вращения вала однофазного конденсаторного двигателя дистанционно с помощью кнопок (кнопочного поста). Помните, в предыдущей статье мы вручную меняли на клеммнике двигателя положение двух перемычек, чтобы изменить направление рабочей обмотки (U1-U2). Теперь Вам нужно убрать эти перемычки, т.к. их роль в данной схеме будут осуществлять нормально-открытые (н.о.) контакты контакторов.
Помните, в предыдущей статье мы вручную меняли на клеммнике двигателя положение двух перемычек, чтобы изменить направление рабочей обмотки (U1-U2). Теперь Вам нужно убрать эти перемычки, т.к. их роль в данной схеме будут осуществлять нормально-открытые (н.о.) контакты контакторов.
Подготовка оборудования для реверса однофазного двигателя
Для начала перечислим все электрооборудование, которое нам необходимо приобрести для организации реверса конденсаторного двигателя АИРЕ 80С2:
1. Автоматический выключатель
Применяем двухполюсный 16 (А), с характеристикой «С» от фирмы IEK.
В этом кнопочном посту есть 3 кнопки:
- кнопка «вперед» (черного цвета)
- кнопка «назад» (черного цвета)
- кнопка «стоп» (красного цвета)
Разберем кнопочный пост.
Мы видим, что каждая кнопка имеет 2 контакта:
- нормально-открытый контакт (1-2), который замыкается в том случае, когда нажмете на кнопку
- нормально-закрытый контакт (3-4), который замкнут до тех пор, пока не нажать кнопку
Прошу заметить, что на фотографии самая крайняя кнопка слева перевернута. Если будете подключать схему реверса однофазного двигателя самостоятельно, то будьте внимательны, кнопки в кнопочном посту могут быть перевернуты. Ориентируйтесь на маркировку контактов (1-2) и (3-4).
Если будете подключать схему реверса однофазного двигателя самостоятельно, то будьте внимательны, кнопки в кнопочном посту могут быть перевернуты. Ориентируйтесь на маркировку контактов (1-2) и (3-4).
3. Контакторы
Также необходимо приобрести два контактора. В своем примере я использую малогабаритные контакторы КМИ-11210 от фирмы IEK, которые устанавливаются на DIN-рейку. Эти контакторы имеют 4 нормально-открытых (н.о.) контакта и способны коммутировать нагрузку до 3 (кВт) при переменном напряжении 230 (В). Вот они как раз нам и подходят, т.к. наш испытуемый однофазный двигатель АИРЕ 80С2 имеет мощность 2,2 (кВт).
Вместо контакторов можно приобрести , на примере которых я рассказывал их устройство и принцип действия.
Катушки этого контактора рассчитаны на переменное напряжение 220 (В), что нужно будет учесть при сборке схемы управления реверсом однофазного двигателя.
Вот, собственно говоря, мое произведение.
Я уже говорил в прошлой статье, что один из читателей сайта «Заметки электрика» по имени Владимир, попросил меня помочь ему мощностью 2,2 (кВт) и составить (придумать) для него схему реверса. По моим эскизам (в том числе монтажным) Владимир собрал вышеприведенную схему в . Чуть позже отписался мне в почту, что схему испытал, все работает, претензий нет.
Если у Вас по материалам сайта имеются какие то вопросы, то задавайте мне их в комментариях или на . В течение 12-24 часов, а может и быстрее, все зависит от моей занятости, я отвечу Вам.
А сейчас я расскажу, как эта схема работает.
Принцип работы схемы реверса однофазного двигателя
Первым делом включаем питающий автомат.
1. Вращение в прямом направлении
При нажатии на кнопку «вперед» катушка контактора К1 получает питание по следующей цепи: фаза — н.з. контакт (3-4) кнопки «стоп» — н.з. контакт (3-4) кнопки «назад» — н. о. контакт (1-2) нажатой кнопки «вперед» — катушка контактора К1 (А1-А2) — ноль.
о. контакт (1-2) нажатой кнопки «вперед» — катушка контактора К1 (А1-А2) — ноль.
Контактор К1 подтягивается и замыкает все свои нормально-открытые (н.о.) контакты:
- 1L1-2T1 (самоподхват катушки К1)
- 5L3-6T3 (имитирует перемычку U1-W2)
- 13НО-14НО (имитирует перемычку V1-U2)
Кнопку «вперед» удерживать не нужно, т.к. катушка контактора К1 встает на «самоподхват» через свой же н.о. контакт (1L1-2T1).
Однофазный двигатель начинает вращаться в прямом направлении.
2. Вращение в обратном направлении
При нажатии на кнопку «назад» катушка контактора К2 получает питание по следующей цепи: фаза — н.з. контакт (3-4) кнопки «стоп» — н.з. контакт (3-4) кнопки «вперед» — н.о. контакт (1-2) нажатой кнопки «назад» — катушка контактора К2 (А1-А2) — ноль.
Контактор К2 срабатывает и замыкает следующие свои нормально-открытые (н.о.) контакты:
- 1L1-2T1 (самоподхват катушки К2)
- 3L2-4T2 (фаза на двигатель в силовой цепи)
- 5L3-6T3 (имитирует перемычку W2-U2)
- 13НО-14НО (имитирует перемычку U1-V1)
Кнопку «назад» удерживать пальцем не требуется, т. к. катушка контактора К2 встает на «самоподхват» через свой же н.о. контакт (1L1-2T1).
к. катушка контактора К2 встает на «самоподхват» через свой же н.о. контакт (1L1-2T1).
Однофазный двигатель начинает вращаться в обратном направлении.
Чтобы остановить двигатель, нужно нажать на кнопку «стоп».
3. Блокировка
Представленная схема реверса конденсаторного однофазного двигателя имеет блокировку кнопок, т.е. если при включенном двигателе в прямом направлении Вы ошибочно нажмете на кнопку «назад», то вначале отключится контактор К1, а потом уже сработает контактор К2. И наоборот. Таким образом мы имеем блокировку от одновременно двух включенных контакторов К1 и К2.
Можно применить и другие виды блокировок, но я ограничился только этой.
P.S. На этом я завершаю свою статью. Если Вам понравилась моя статья, то буду очень благодарен, если Вы поделитесь ей в социальных сетях. А также не забывайте подписываться на мои новые статьи — дальше будет интереснее.
Инструкция
Независимо от того, каким образом асинхронный подключен к сети, отключите питание устройства, в котором он установлен. При наличии высоковольтных разрядите их перед прикосновения к любым деталям устройства.
При наличии высоковольтных разрядите их перед прикосновения к любым деталям устройства.
Обязательно убедитесь в том, что изменение направления вращения не повлечет за собой выход из строя или ускоренный износ устройства, в состав которого входит электродвигатель.
Если питается от однофазной сети через , вначале обязательно убедитесь в том, что нагрузка на его валу мала, и что при изменении направления вращения она не возрастет. Помните, что возрастание нагрузки при таком способе питания может привести к остановке двигателя с последующим его возгоранием. Затем тот вывод конденсатора, который соединен не с , а с одним из питающих проводов, отключите от него и переключите на другой питающий провод. Если имеется второй, пусковой конденсатор, с ним проделайте то же самое (сохранив включенную последовательно с ним пусковую кнопку).
В случае, если двигатель питается через трехфазный инвертор, никаких переключений не производите. Узнайте из инструкции к прибору, как осуществить реверс (перестановкой джампера, нажатием кнопки, изменением настроек через меню или особой комбинацией клавиш, и т. п.), после чего осуществите описанные там действия.
п.), после чего осуществите описанные там действия.
Источники:
- как поменять вращение двигателя
В наше время асинхронные агрегаты используются главным образом в режиме двигателя. Устройства, имеющие мощность более 0.5 кВт обычно изготавливают трёхфазными, меньшей мощности – однофазными. За свое долгое существование асинхронные двигатели нашли широкое применение в разных отраслях промышленности и сельского хозяйства. Их используют в электроприводе подъёмно-транспортных машин, металлорежущих станков, транспортёров, вентиляторов и насосов. Менее мощные двигатели применяют в устройствах автоматики.
Вам понадобится
Инструкция
Возьмите трехфазный асинхронный . Снимите клеммную коробку. Для этого выкрутите отверткой два винта, которыми она крепится к корпусу. Концы обмоток двигателя обычно выведены на 3-х или 6-и клеммную колодку. В первом случае это означает, что фазные статорные обмотки соединены «треугольником» или «звездой». Во втором — не подключены между собой. В этом случае на первый план выходит их правильное соединение. Включение «звездой» предусматривает объединение одноименных выводов обмоток (конец или начало) в нулевую точку. При подключении «треугольником» следует соединить конец первой обмотки с началом второй, затем конец второй — с началом третьей, а затем конец третьей — с началом первой.
В этом случае на первый план выходит их правильное соединение. Включение «звездой» предусматривает объединение одноименных выводов обмоток (конец или начало) в нулевую точку. При подключении «треугольником» следует соединить конец первой обмотки с началом второй, затем конец второй — с началом третьей, а затем конец третьей — с началом первой.
Возьмите омметр. Его используйте в том случае, когда выводы обмоток асинхронного электродвигателя не маркированы. Определите прибором три обмотки, обозначьте их условно I, II и III. Соедините две любые из них последовательно, чтобы найти начало и конец каждой из обмоток. Подайте на них переменное напряжение величиной 6 — 36 В. К двум концам третьей обмотки подключите вольтметр переменного тока. Возникновение переменного напряжения говорит о том, что обмотки I и II были подключены согласно, если его нет, то встречно. В этом случае поменяйте местами выводы одной из обмоток. Затем отметьте начало и конец I и II обмоток. Для определения начало и конца третьей обмотки, поменяйте местами концы обмоток, допустим, II и III, и по вышеописанной методике повторите измерения.
Подключите к трехфазному асинхронному двигателю, который включен в однофазную сеть, фазосдвигающий конденсатор. Определить его требуемую емкость (в мкФ) можно по формуле С = k*Iф/U, где U — напряжение однофазной сети, В, k — коэффициент, который зависит от соединения обмоток, Iф — номинальный фазный ток электродвигателя, A. Учитывайте, что когда обмотки асинхронного электродвигателя соединены «треугольником», то k = 4800, «звездой» — k = 2800. Примените бумажные конденсаторы МБГЧ, К42-19, которые должны быть рассчитаны на напряжение не меньше, чем напряжение питающей сети. Помните, что даже при правильно рассчитанной емкости конденсатора, асинхронный электродвигатель разовьет мощность не более 50-60 % от номинала.
Источники:
- Подключение трехфазного асинхронного двигателя к однофазной сети
Асинхронная машина представляет собой устройство, работающее на электричестве с переменным током, причем частота вращения машины не равна частоте вращения магнитного поля, которое создается в результате тока обмотки статора. Так какие существуют типы подобных устройств и по какому принципу они работают?
Так какие существуют типы подобных устройств и по какому принципу они работают?
Инструкция
В некоторых странах к подобным устройствам также относят коллекторные машины и называют асинхронные еще и индукционными, что объясняется процессом, в ходе которого ток в обмотке ротора индуцируется полем статора. Современный мир нашел применение асинхронным машинам в качестве электродвигателей, являющихся преобразователями энергии электричества в механическую силу.
Большая востребованность подобных устройств объясняется двумя их достоинствами – легкое и достаточно простое изготовление и отсутствие контакта электричества в роторе с неподвижной частью машины. Но есть у асинхронных машин и свои недостатки – это сравнительно малый пусковой момент и значительный пусковой ток.
История создания устройств асинхронного типа идет еще от англичанина Галилео Феррариса и Николы Теслы. Первый в 1888 году опубликовал собственные исследования, в которых были изложены теоретические основы подобного двигателя. Но Феррарес ошибался, считая, что асинхронная машина обладает небольшим КПД. В том же году статью Галилео Феррариса прочитал россиянин Михаил Осипович Доливо-Добровольский, который уже в 1889-ом получил патент на трехфазный асинхронный двигатель, устроенный по типу короткозамкнутого ротора «беличье колесо». Именно эта троица и является первооткрывателем эры массового применения машин на электричестве в промышленности, а сейчас асинхронные устройства представляют собой самые распространенные двигатели.
Но Феррарес ошибался, считая, что асинхронная машина обладает небольшим КПД. В том же году статью Галилео Феррариса прочитал россиянин Михаил Осипович Доливо-Добровольский, который уже в 1889-ом получил патент на трехфазный асинхронный двигатель, устроенный по типу короткозамкнутого ротора «беличье колесо». Именно эта троица и является первооткрывателем эры массового применения машин на электричестве в промышленности, а сейчас асинхронные устройства представляют собой самые распространенные двигатели.
Принцип действия асинхронных устройств состоит в подаче переменного напряжения по обмоткам с током и с дальнейшим созданием вращающегося магнитного поля. Последнее, в свою очередь, оказывает воздействие на обмотку ротора, согласуясь с законом электромеханической индукции, и вступает во взаимодействие с полем статора, которое вращается. Результатом этих действий является воздействие на каждый зубец ротора силы, складывающейся исключительно по окружности и создающей вращающийся электромагнитный момент. Именно данные процессы и заставляют ротор вращаться.
Именно данные процессы и заставляют ротор вращаться.
Современные и применяемые асинхронные двигатели разделяются по способам управления на следующие типы – реостатные, частотные, с переключением обмоток по схеме «звезда», импульсные, с изменением числа пар полюсов, с изменением амплитуды питающего напряжения, фазовые, амплитудно-фазовые, с включением в цепь подпитки статора реактора, а также с сопротивлением индуктивного типа.
Видео по теме
12 ИюнРеверсивное подключение однофазового асинхронного двигателя своими руками
Перед выбором схемы подключения однофазового асинхронного двигателя принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Схема подключения однофазного двигателя кд-25. Как изменить направление вращения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Как изменить направление вращения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке , как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазного двигателя без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Как изменить направление вращения однофазного эл. Двигателя?. Разглядим их подробнее.
Ее можно решить 3-мя методами. Как изменить направление вращения однофазного эл. Двигателя?. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб поменять направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно пошевелить мозгами, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.
Читайте так же
В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ
НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕМоторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Подключение однофазного электродвигателя с левого
вращения на правоеПокажу на пальцах, как можно сделать реверс для однофасзного двигателя .
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.

После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Если изменить полярность напряжения на электродвигателе, как показано на рис 3.21 в скобках, то изменения направления вращения (реверса) двигателя не произойдет. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.
Читайте так же
На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри.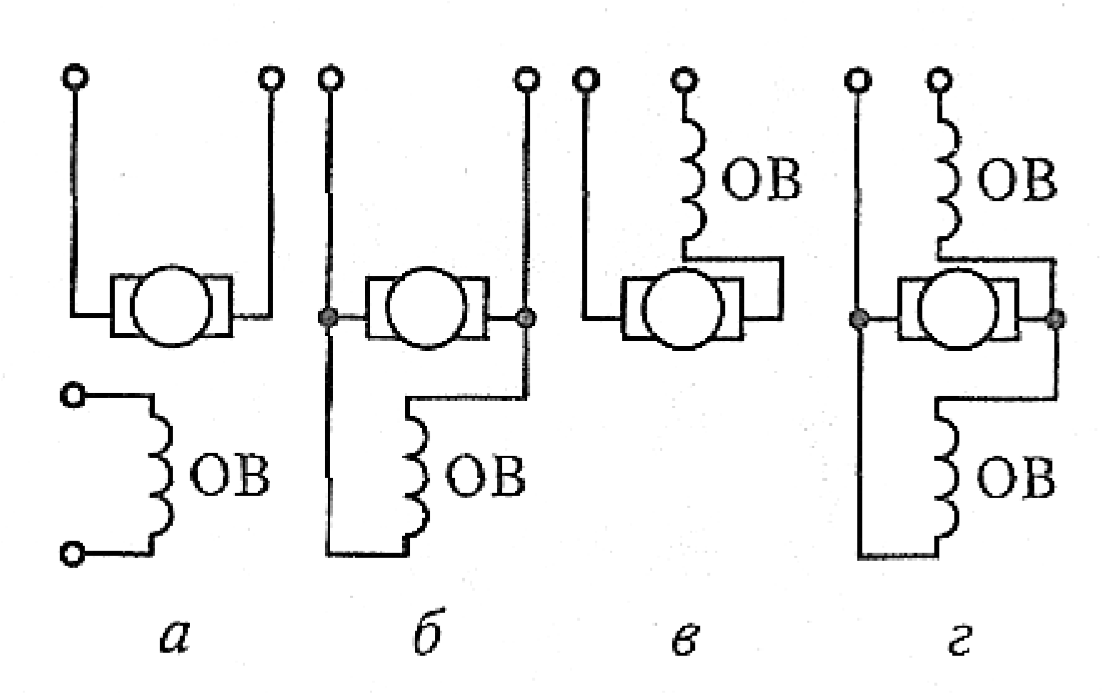 Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).
Посмотрите на рисунок выше. Как изменить направление вращения двигателя — форум. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно! Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.

Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. как изменить направление вращения двигателя его вращения и как поменять. КПД при этом тоже оставляет желать лучшего.
Вконтакте
Одноклассники
Google+
Схемы подключения двигателя стиральной машины
Стиральные машины, со временем, выходят из строя или морально устаревают.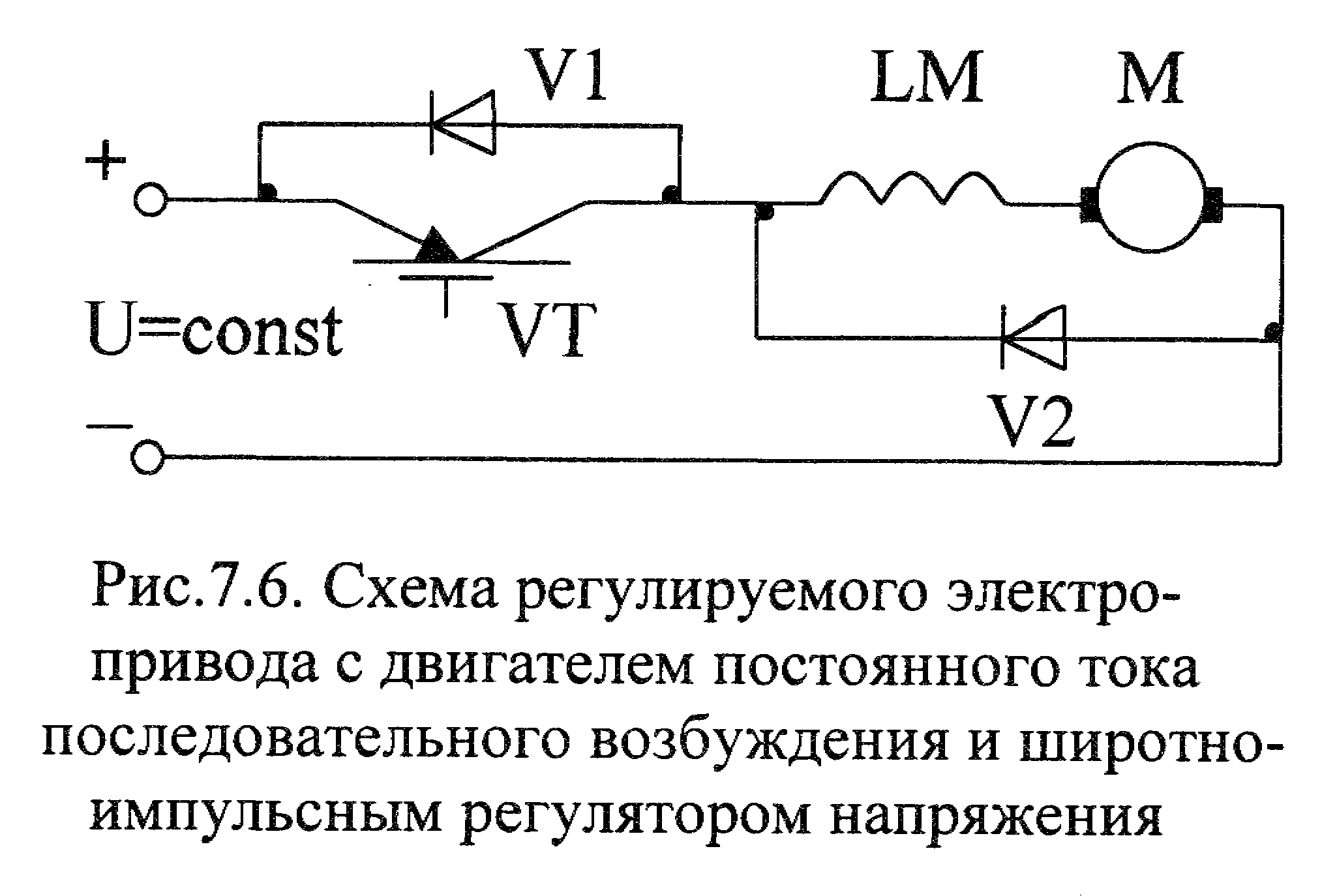 Как правило,
Как правило,
основой любой стиралки есть ее электродвигатель, который может найти свое применение и
после разборки стиралки на запчасти.
Мощность таких двигателей, как правило не меньше 200 Вт, а порой и куда больше, скорость
оборотов вала может доходить и до 11 000 оборотов в минуту что вполне может подойти для использование такого двигателя в хозяйственных или мелких промышленных нуждах.
Вот лишь несколько идей удачного применения электродвигателя от стиралки:
- Точильный («наждачный») станок для заточки ножей и мелкого домашнего и садового инструмента.Двигатель устанавливают на прочном основание, а на вал закрепляют точильный камень или наждачный круг.
- Вибростол для производства декоративной плитки, тротуарной плитки или других бетонных изделий где необходимо уплотнение раствора и удаление от туда воздушных пузырей. А возможно вы занимаетесь производством силиконовых форм, для этого также нужен вибростол.
- Вибратор для усадки бетона.
 Самодельные конструкции которых полно в интернете, вполне могут быть реализованы с применением небольшого двигателя от стиральной машинки.
Самодельные конструкции которых полно в интернете, вполне могут быть реализованы с применением небольшого двигателя от стиральной машинки.
- Бетономешалка. Вполне подойдет такой двигатель и для небольшой бетономешалки. После небольшой переделки, можно использовать и штатный бак от стиральной машинки.
- Ручной строительный миксер. С помощью такого миксера можно замешивать штукатурные смеси, плиточный клей, бетон.
- Газонокосилка. Отличный вариант по мощности и габаритам для газонокосилки на колесах. Подойдет любая готовая платформа на 4-х колесах с закрепленным в центре двигателем с прямым приводом на «ножы» которые будут находится снизу. Высоту газона можно регулировать посадкой, например, поднимая или опуская колеса на шарнирах по отношению к основной платформе.
- Мельница для измельчения травы и сена или зерна. Особенно актуально для фермеров и людей занимающихся разведением домашней птицы и другой живности. Также можно делать заготовки корма на зиму.

Вариантов применения электромотора может быть очень много, суть процесса заключается в возможности вращать на высоких оборотах разные механизмы и приспособления. Но какой бы механизм сконструировать вы б не собирались, все равно вам нужно будит правильно
подключить двигатель от стиральной машинки.
Виды двигателей
В стиральных машинках разных поколений и стран производства, могут быть и разные типы
электродвигателей. Как правило это один из трех вариантов:
Асинхронный.
В основном это все трехфазные двигатели, могут быть и двухфазными но это большая редкость.
Такие двигатели просты в своей конструкции и обслуживанию, в основном все сводится к смазке подшипников. Недостатком есть большой вес и габариты при небольшом КПД.
Такие двигатели стоят в старинных, маломощных и недорогих моделях стиральных машин.
Коллекторный.
Двигатели которые пришли на смену большим и тяжелым асинхронным устройствам.
Такой двигатель может работать как от переменного так и от постоянного тока, на практике он будет вращаться даже от автомобильного аккумулятора на 12 вольт.
Двигатель может вращаться в нужную нам сторону, для этого нужно всего лишь сменить полярность подключения щеток к обмоткам статора.
Высокая скорость вращения, плавное изменение оборотов изменением прилагаемого напряжения, небольшие размеры и большой пусковой момент — вот лишь небольшая часть преимуществ такого типа двигателей.
К недостаткам можно отнести износ коллекторного барабана и щеток и повышенный нагрев при не столь продолжительной работе. Также необходима более частая профилактика, например чистка коллектора и замена щеток.
Инверторный (бесколлекторный)
Инновационный тип двигателей с прямым приводом и небольшими габаритами при довольно не малой мощности и высоком КПД.
В конструкции двигателя все так же присутствует статор и ротор, однако количество соединительных элементов сведено к минимуму. Отсутствие элементов подверженных быстрому износу, а так же низкий уровень шума.
Такие двигателя стоят в последних моделях стиральных машин и их производство требует сравнительно больше затрат и усилий что конечно же влияет на цену.
Схемы подключения
Тип двигателя с пусковой обмоткой (старые/дешевые стиралки)
Для начала нужен тестер или мультиметр. Нужно найти две соответствующие друг другу пары выводов.
Щупами тестера, в режиме прозвонки или сопротивления, нужно отыскать два провода которые между собой прозваниваются, остальные два провода автоматически будут парой второй обмотки.
Дальше следует выяснить, где у нас пусковая, а где – рабочая обмотки. Нужно замерить их сопротивление: более высокое сопротивление укажет на пусковую обмотку (ПО), которая создает начальный крутящий момент. Более низкое сопротивление укажет нам на обмотку возбуждения (ОВ) или другими словами — рабочую обмотку, создающую магнитное поле вращения.
Вместо контактора «SB» может стоять неполярный конденсатор малой емкости (около 2-4 мкФ)
Как это обустроено в самой стиралке для удобства.
Если же двигатель будет запускаться без нагрузки, то есть, не будит на его валу шкива с нагрузкой в момент запуска, то такой двигатель может запускаться и сам, без конденсатора и кратковременной «запитки» пусковой обмотки.
Если двигатель сильно перегревается или греется даже без нагрузки непродолжительное время, то причин может быть несколько. Возможно изношены подшипники или уменьшился зазор между статором и ротором в следствие чего они задевают друг друга. Но чаще всего причиной может быть высокая емкость конденсатора, проверить несложно — дайте поработать двигателю с отключенным пусковым конденсатором и сразу все станет ясно. При необходимости емкость конденсатора лучше уменьшить до минимума при котором он справляется с запуском электродвигателя.
В кнопке контакт «SB» строго должен быть не фиксируемым, можно попросту воспользоваться кнопкой от дверного звонка, в противном случае пусковая обмотка может сгореть.
В момент запуска кнопку «SB» зажимают до момента раскрутки вала на полную (1-2 сек.), дальше кнопка отпускается и напряжение на пусковую обмотку не подается. Если необходим реверс — нужно сменить контакты обмотки.
Иногда в такого двигателя может быть не четыре, а три провода на выходе, в таком случае две обмотки уже соединены в средней точке между собой, как показано в схеме.
В любом случае разбирая старую стиралку, можно присмотреться как там был подключен в ней ее двигатель.
Когда возникает необходимость реализовать реверс или сменить направления вращения двигателя с пусковой обмоткой, можно подключить по следующей схеме:
Интересный момент. Если в двигателе не использовать (не задействовать) пусковую обмотку, то направление вращения может быть всевозможным (в любую из сторон) и зависить, например, от того в какую сторону провернуть вал в тот момент когда подключается напряжение.
Коллекторный тип двигателя (современные, стиралки автомат с вертикальной загрузкой)
Как правило это коллекторные двигатели без пусковой обмотки, которые не нуждаются и в пусковом конденсаторе, такие двигатели работают и от постоянного тока и от переменного.
Такой двигатель может иметь около 5 — 8 выводов на клемном устройстве, но для работы двигателя вне стиральной машинки, они нам не понадобятся. В первую очередь нужно исключить ненужные контакты тахометра. Сопротивления обмоток тахометра составляет примерно 60 — 70 Ом.
Сопротивления обмоток тахометра составляет примерно 60 — 70 Ом.
Также могут быть выведены и выводы термозащиты, которые встречаются редко, но они нам так же не понадобятся, это как правило нормально замкнутый или разомкнутый контакт с «нулевым» сопротивлением.
Дальше подключаем напряжение к одному из выводов обмотки. Второй ее вывод соединяют с
первой щеткой. Вторая щетка подключается к оставшемуся 220-вольтовому проводу. Двигатель должен заработать и вращаться в одну сторону.
Чтобы изменить направление движения двигателя, подключение щеток следует поменять местами: теперь первая будет включена в сеть, а вторая соединена с выходом обмотки.
Такой двигатель можно проверить автомобильным аккумулятором на 12 вольт, не боясь при этом «спалить» его из за того что неправильно подключили, спокойно можно и
«поэкспериментировать» и с реверсом и посмотреть как двигатель работает на малых оборотах от низкого напряжения.
Подключая к напряжению 220 вольт, имейте в виду что двигатель резко запустится с рывком,
поэтому лучше его закрепить неподвижно чтоб он не повредил и не замкнул провода.
О том как подключить трехфазные асинхронные двигатели к обычной бытовой сети 220 вольт, довольно подробно можно узнать в статье — «Подключение трехфазного двигателя»
Регулятор оборотов
Если возникает необходимость регулирования количества оборотов, можно воспользоваться
бытовым регулятором освещения (диммером).Но для этой цели нужно подбирать такой диммер который по мощности будет с запасом больше мощности двигателя, или же потребуется доработка, можно из той же стиральной машинки извлечь симистор с радиатором и впаять его на место маломощной детали в конструкции регулятора освещения. Но здесь уже нужно иметь навыки работы с электроникой.
Если же вам удастся найти специальны диммер для подобных электродвигателей то это будет
самым простым решением. Как правило их можно подыскать в точках продажа систем вентиляции и используются они для регулировки оборотов двигателей приточных и вытяжных систем вентиляции.
Регулирование скорости вращения коллекторного двигателя постоянного тока
Двигатели постоянного тока и мотор-редукторы, созданные на их основе, нуждаются в надежной системе управления скоростью вращения вала. Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Простым и удобным методом решения проблемы является применение широтно-импульсной модуляции (ШИМ). Способ основан на преобразовании постоянного напряжения в импульсное. При этом управление частотой вращения осуществляют путем изменения длительности подающегося импульса.
Например, по такому же принципу используют ШИМ схему в осветительных приборах для регулировки яркости свечения светодиодных ламп. Так как у светодиода небольшое время затухания частота работы устройства регулирования имеет большое значение. Качественные приборы должны полностью исключать мерцание при пониженной яркости свечения.
Управление двигателями постоянного тока методом ШИМ стало возможным благодаря силе инерции. После прекращения подачи напряжения на обмотки вал электродвигателя останавливается не сразу, продолжая движение по инерции. Путем кратковременной подачи напряжения с определенным периодом можно добиться плавного регулирования скорости вращения вала. При этом главным регулирующим параметром является размер паузы между импульсами.
Применение устройства управления для двигателя постоянного тока
Этот метод управления двигателем постоянного тока позволяет плавно изменять скорость вращения вала в широких пределах. ШИМ делает возможным изменение параметров работы двигателя в автоматическом режиме в соответствии с установленными данными. Необходимую информацию регулятор оборотов коллекторного двигателя получает от пользователя или специального датчика, который определяет, температуру, скорость вращения или любой другой параметр. Например, в воздушных системах охлаждения регулятор оборотов изменяет скорость вращения вентилятора на основе данных, полученных от датчика температуры. Это позволяет автоматически замедлять скорость потока воздуха при низкой температуре и увеличивать при высокой.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления
двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи. Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Оптимальные значения частоты ШИМ сигнала
Частота может варьироваться в широких пределах от нескольких десятков до нескольких сотен герц. Благодаря емкостной нагрузке происходит сглаживание импульсов. В итоге на двигатель подается «постоянное» напряжение средней величины в зависимости от параметров управляющей системы. Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Например, если двигатель получает питание от сети напряжением 10В, и к нему подключить регулятор с длительностью импульса равной половине периода подачи, то эффект будет таким же, как при подаче 5В на двигатель напрямую.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Регуляторы хода
Автор — Владимир Васильков (Vovic)Введение
На моделях c электроприводом требуется управлять электромоторами — их нужно включать, менять их обороты и останавливать. Если на двигателях внутреннего сгорания для этих целей служат управляемый сервомашинкой карбюратор, то электромоторам требуется отдельное устройство, которое называется регулятором хода.
Исторически первыми появились механические регуляторы. Они представляют собой мощный реостат (переменное сопротивление), который включается последовательно с электродвигателем. Специальная рулевая машинка позволяет управлять реостатом, регулируя, таким образом, обороты двигателя. Наряду с простотой, механическим регуляторам присущи такие недостатки, как поглощение драгоценной электроэнергии на борту и превращение ее в тепло. Это тепло еще нужно отвести в окружающую среду, что создает дополнительные проблемы. Особой надежностью эти регуляторы не отличаются, поскольку содержат скользящие контакты, через которые протекает большой ток. Сильный нагрев конструкции также не способствует ее надежности. Сейчас механические регуляторы используются только в простейших игрушках, где мощность силового мотора невелика, а низкая цена очень важна. На серьезные модели такие регуляторы не ставят, и мы о них больше говорить не будем.
Наряду с простотой, механическим регуляторам присущи такие недостатки, как поглощение драгоценной электроэнергии на борту и превращение ее в тепло. Это тепло еще нужно отвести в окружающую среду, что создает дополнительные проблемы. Особой надежностью эти регуляторы не отличаются, поскольку содержат скользящие контакты, через которые протекает большой ток. Сильный нагрев конструкции также не способствует ее надежности. Сейчас механические регуляторы используются только в простейших игрушках, где мощность силового мотора невелика, а низкая цена очень важна. На серьезные модели такие регуляторы не ставят, и мы о них больше говорить не будем.
Развитие техники полупроводниковых приборов позволило создать электронные модельные регуляторы хода без двигающихся частей, свободные от указанных выше недостатков. В них энергия поступает на мотор импульсами, и все регулировки происходят путем изменения длительности импульсов.
Помимо электронных регуляторов хода, выпускаются электронные выключатели ходовых электродвигателей. Они не регулируют мощность двигателя, а только включают и выключают его по команде с передатчика. О них мы тоже дальше говорить не будем.
Они не регулируют мощность двигателя, а только включают и выключают его по команде с передатчика. О них мы тоже дальше говорить не будем.
В первой части данной статьи рассказано то, что вам понадобится знать о регуляторах хода. Во второй половине рассказывается о том, как они устроены и функционируют. Как и в статье про сервомашинки, эта часть для любителей не просто гонять модели, а разобраться в сути принципа действия регуляторов хода.
Общие понятия и функции
Обычно, помимо управления оборотами, регуляторы предлагают много дополнительных функций. Кроме того, они имеют ряд характеристик, от которых может зависеть выбор вами той или иной модели. Поэтому для начала дадим основные определения с комментариями, чтобы вам было легче ориентироваться.
Тормоз. Для многих моделей нужно не только быстро раскрутить двигатель на старте, но и быстро его затормозить. Это важно для автомоделей и для электролетов со складывающимся винтом. Торможение осуществляется путем замыкания обмоток двигателя через регулятор. Иногда реализуется функция «мягкого» тормоза, когда обмотки замыкаются не сразу, а небольшими импульсами. Это позволяет уменьшить нагрев регулятора и продлить жизнь коллектора электродвигателя.
Реверс. Иногда бывает полезно иметь на модели задний ход. Поэтому многие регуляторы позволяют менять направление вращения электродвигателя, подавая на него напряжение в обратной полярности. Задний ход зачастую делается не на полную мощность, так как «на всю катушку» он просто не нужен. Зато появляется возможность упростить реализацию силовых ключей заднего хода и уменьшить цену регулятора.
BEC-система (Battery Elimination Cirquit). В большинстве регуляторов для низковольтных моторов (под батареи не более 10-15 банок) встраивают систему вторичного электропитания для приемника и сервомашинок. К управлению двигателем она отношения не имеет, но позволяет не ставить на модель два аккумулятора: один силовой, а другой для системы радиоуправления. Все питание происходит от силовых аккумуляторов, что весьма удобно.
Опторазвязка. В мощных регуляторах на повышенные напряжения — от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на высокочувствительные входные цепи приемника. Естественно, в случае применения опторазвязки приемнику потребуется отдельное питание.
Защитно-сервисные функции
К функциям собственно регулирования добавляют разнообразные полезные вещи:
POR (Power on Reset). Сброс при включении. При включении бортового питания модели может так случиться (по забывчивости моделиста), что ручка управления двигателем не стоит в положении «Стоп». Тогда двигатель модели может сразу выйти на максимальные обороты. Для не готового к этому моделиста такой внезапный старт может кончиться серьезными травмами и потерей модели. Для предотвращения этого в программу контроллера вводят функцию POR. Она работает так: при подаче питания на регулятор хода он принудительно ставит двигатель в положение «Стоп» вне зависимости от длительности управляющего импульса от приемника. После того, как моделист переведет ручку в положение «Стоп», блокировка снимается, и двигателем можно управлять, как обычно.
PCO (Power Cut Off). Функция отключения электродвигателя при падении напряжения аккумулятора ниже заданного порога. Очень полезна для летающих электромоделей с системой ВЕС. В отличие от наземных моделей, просто останавливающихся при отключении двигателя, летающую модель еще надо посадить на землю. Для этого после отключения ходового двигателя в аккумуляторе остается еще немного энергии для работы приемника и сервомашинок. Порог отключения рассчитан на определенный вид аккумуляторов, чаще никель-кадмиевых. Если подключить литиевые, то они могут испортиться с одной зарядки. Продвинутые регуляторы позволяют настраивать порог отключения под конкретный тип аккумулятора.
TOP (Thermal Overload Protection) — защита силовых ключей от токовой перегрузки, которая может привести к тепловому разрушению MOSFET-транзисторов. Защищает также от короткого замыкания в нагрузке. Реализуется путем встраивания в силовые цепи датчика тока и программирования в контроллере функции порогового отключения всех ключей. Сбрасывается коммутацией питания.
TP (Thermal Protection) — защита от перегрева регулятора хода. На плате ставится термодатчик, отключающий регулятор при его нагреве свыше допустимого уровня. Сбрасывается при охлаждении корпуса регулятора.
RVP (Reverse Voltage Protection) — защита от переполюсовки питающего напряжения. Неизбежно усложняет и удорожает регулятор, ухудшая его параметры. Применяется редко. На большинстве хороших регуляторов хода не используется.
Обилие систем защиты в регуляторах может создать ложное представление о том, что регулятор хода нельзя спалить. Это не так. Во-первых, регуляторы редко защищают от переполюсовки силового аккумулятора. В этом случае выгорают, как правило, все силовые ключи. По моим наблюдениям, так сжигается каждый второй регулятор хода. Во-вторых, в некоторых случаях защиту приходится отключать. Например, в электровертолете. Потому что срабатывание защиты в полете сохранит регулятор, но угробит саму модель. В-третьих, защита спасает регулятор, только если он работает с электродвигателем, более-менее согласованным с ним по характеристикам.
Важные характеристики
У регулятора хода есть несколько важных характеристик, от которых зависят его возможности, определяющие, с каким двигателем и аккумулятором он сможет работать вообще.
Максимальный постоянный ток. Определяет, какой максимальный ток двигателя может выдерживать регулятор длительное время.
Параметр простой лишь на первый взгляд. На английском обозначается как Continuous Current. Путаница возникает в разном понимании термина Continuous. Для микроэлектроники это доли секунды. Т.е. это ток, который выдерживают силовые ключи и не срабатывает защита TOP (см. выше). Совсем не означает, что такой ток выдержат провода и печатные проводники в регуляторе. Поэтому, если в характеристиках регулятора написано Continuous Current — 400А, это совсем не значит, что регулятор выдержит такой ток в течение минуты. Реальный продолжительный ток в несколько раз меньше. Многие производители указывают время продолжительности максимального тока.
Максимальный пиковый ток. Это ток, который кратковременно может выдерживать регулятор. Обычно пиковый ток в несколько раз превышает постоянный. Пиковые токи возникают во время старта, когда двигатель должен быстро развить большой вращающий момент. Например, при резком старте автомодели.
В настоящее время, чтобы облегчить жизнь потребителей, зачастую применяется альтернативная система обозначения возможностей регуляторов. Подобное можно часто встретить для автомоделей. Там для регуляторов сообщается, на скольки-витковые моторы они рассчитаны. Естественно, для моторов, в свою очередь, указывается количество витков в обмотках. Т.н. безлимитные регуляторы могут работать с любыми автомодельными электродвигателями, но не с любыми двигателями вообще!
Максимальное напряжение батареи. При большем, чем разрешено, напряжении батареи регулятор может сгореть. Часто в характеристиках обозначают не напряжение, а число банок в батарее NiCd аккумуляторов. Умножьте эту величину на 1,2 Вольт и получите максимальное разрешенное напряжение.
Внутреннее сопротивление. Само собой, что схемы коммутации электроэнергии, применяемые в регуляторах, вносят определенные потери энергии, за счет внутреннего сопротивления ключей. Поэтому все регуляторы имеют такую характеристику, как внутреннее сопротивление. Хоть внутреннее сопротивление регулятора и невелико (0,0006 Ом у чемпионатных регуляторов), вносимые потери могут сыграть большую роль, когда дело дойдет до серьезных соревнований.
Кстати, у реверсивных регуляторов внутреннее сопротивление обычно больше, чем у аналогичных моделей без реверса. Это происходит из-за особенностей построения схем коммутации электродвигателя. Какой из этого можно сделать практический вывод? Да очень простой. Если вы собираетесь серьезно кататься на автомодели, и потом выступать в соревнованиях, вам лучше сразу учиться на регуляторе без реверса. Хотя поначалу без заднего хода ездить неудобно.
Частота импульсов регулятора. Оптимальная частота регулирования зависит от параметров используемого электродвигателя. Если частота много выше оптимальной, — растут потери на коммутацию ключей в регуляторе. Эти потери связаны с тем, что даже самый быстрый ключ не открывается и не закрывается мгновенно. В то время, когда он переходит из одного состояния в другое, на нем теряется энергия. Если же частота много ниже оптимальной, — растут индуктивные потери в моторе.
В регуляторах хода бесколлекторных двигателей еще больше вариантов параметров. Поэтому при подборе регулятора к двигателю лучше просто ориентироваться на рекомендации производителя.
Настройка регуляторов хода
Производители регуляторов хода стараются сделать свои изделия совместимыми с широкой номенклатурой двигателей и передатчиков радиоуправления. Поэтому они вводят в них много параметров, настраиваемых пользователем.
В первую очередь, настраиваются положения джойстиков передатчика, соответствующие режимам «нейтраль», «тормоз», «максимальный газ», «реверс». Такие режимы, как «тормоз» и «реверс», могут отключаться. Настройка крайних значений обеспечивает уверенную работу регулятора с передатчиками, у которых могут существенно отличаться значения продолжительности канального импульса в крайних положениях джойстика. В некоторых регуляторах настраивается величина мертвой зоны в положении «нейтраль». Последовательность операций по настройке различная у разных производителей. Здесь надо следовать указаниям инструкции. В качестве команд настройки используются кнопки на корпусе регулятора, либо те или иные положения джойстика. Некоторые регуляторы переходят в режим настройки при подключении или съеме перемычки-джампера, как в компьютере. В качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. В последнее время многие регуляторы используют звуковую индикацию режимов настройки. При этом в качестве пищалки работают обмотки подключенного двигателя.
Некоторые регуляторы позволяют изменять частоту импульсного регулирования при работе регулятора с разными двигателями. Причем частота может определяться отдельно для прямого хода и для торможения. В некоторых приложениях могут отключаться при программировании системы защиты, например, в электровертолете.
В продвинутых регуляторах хода бессенсорных двигателей есть возможность изменения сдвига фаз (Timing) трехфазного тока относительно положения ротора. Это связано с особенностью работы бессенсорных регуляторов, у которых режимы наибольшей мощности и наивысшего КПД не совпадают. В этом случае пользователь может выбрать то, что для его модели важнее.
Поскольку мир моделизма разнообразен, выпускаются специализированные регуляторы, скажем, для автомоделей, судомоделей, самолетов и вертолетов. В этих моделях набор реализуемых функций разнообразен. Чтобы не расширять необоснованно номенклатуру регуляторов хода, некоторые производители делают универсальный прибор с перенастройкой под судо- авто- авиамодели.
В большинстве приложений регулятор хода регулирует мощность, подводимую к двигателю, пропорционально положению джойстика на передатчике. Но не везде. В электровертолетах гораздо важнее регулировать не мощность, а обороты двигателя. В этом случае при изменении нагрузки и постепенной разрядке аккумулятора все настройки системы управления сохраняют свою эффективность. В регуляторы хода коллекторных двигателей для обратной связи добавляют датчик Холла и магнитик на роторе вертолета. Регуляторы хода бесколлекторных двигателей имеют информацию об оборотах уже внутри и дополнительных датчиков не требуют. Многофункциональные регуляторы при настройке переводятся в вертолетный режим, после чего они стабилизируют и регулируют не мощность, а обороты двигателя.
В продвинутых регуляторах может настраиваться очень много параметров. Для примера рассмотрим параметры настройки автомодельных регуляторов хода «Циклон» фирмы Novak на следующем графике:
По оси абсцисс — длина канального импульса при соответствующем положении курка газа. Здесь обозначены следующие точки и соответствующие им параметры:
- Абсцисса точки а — положение курка при 100% торможении
- Длина участка b-c — величина мертвой зоны нейтрали
- Середина участка b-c — положение курка в нейтрали
- Ордината точки d — минимальная величина газа
- Абсцисса точки e — положение курка на 100% газа
Кроме того, для участка а-b задается частота импульсов торможения, для участка d-e частота импульсов прямого хода, для нейтрали задается величина подтормаживания (Drag Brake) и частота его импульсов. Итого — девять параметров. Это совсем не предел. У шульцевского авторегулятора mcc1010 устанавливается пятнадцать параметров. Понятно, что не всякий моделист готов самостоятельно кропотливо оптимизировать все эти параметры под свой мотор и конкретную трассу. Чтобы упростить эту задачу, производители создали несколько комплектов параметров под определенные трассы и моторы. Эти комплекты хранятся в памяти регулятора хода. Моделисту средней руки остается парой нажатий кнопок выбрать подходящий набор параметров. Крутые чемпионы, конечно, настраивают свои болиды, в т.ч. и в части регулятора хода, сами.
Особенности подключения регуляторов хода
Провода. Регулятор хода соединяется проводами с аккумулятором и электродвигателем. Эти провода — важный элемент в силовой установке. Для правильной ее работы необходимо соблюдать некоторые рекомендации. В качестве соединительных проводов используется медный гибкий многожильный провод. Провода не электротехнические, а специальные — с очень большим количеством очень тонких жил. Такие провода, помимо электромоделей, широко используются для подключения акустических систем большой мощности звуковой аппаратуры класса Hi-End, и их можно найти в серьезных магазинах аудиотехники. Наиболее распространены провода сечением 1 кв. мм. для токов до 20 ампер, 1,5 кв. мм. — для токов до 30 ампер, 2,5 кв. мм. — до 50 ампер и 4 кв. мм. — до 80 ампер. Использование меньшего сечения на большие токи чревато как минимум снижением КПД мотоустановки, как максимум — аварией с пожаром. Наоборот — допустимо, но необоснованно завышается вес, — медь-то тяжелая!
Здесь даны значения допустимых токов, рекомендуемые для специальных модельных проводов в термостойкой силиконовой изоляции. При нагружении максимальным током они прилично греются. Для проводов в обычной изоляции лучше уменьшить допустимый ток от выше рекомендованных значений раза в полтора.
Длина проводов от регулятора до двигателя делается как можно меньше. Дело в том, что по этим проводам коммутируются большие токи сравнительно высокой частоты. Компоненты их спектра могут попасть в радиоканал аппаратуры управления в виде помех, спровоцировав отказ системы управления.
Конденсаторы. Для уменьшения широкополосных помех, генерируемых щеточно-коллекторым узлом, используется его шунтирование керамическими или тонкопленочными конденсаторами. Один конденсатор включается между щетками, два других — между каждой щеткой и корпусом двигателя. Емкость конденсатора подбирается компромиссным путем. Дело в том, что конденсаторы большей емкости лучше подавят помехи. Но при увеличении их емкости растут коммутационные потери на ключах регулятора хода. Поэтому из благих пожеланий уменьшить помехи не надо увеличивать емкость блокирующих конденсаторов! Так можно резко снизить КПД, а то и спалить регулятор хода. А вот длину проводов надо минимизировать, потому как, в сущности, это антенны, излучающие помехи. Кстати, при проверке дальности работы аппаратуры радиоуправления, силовой мотор должен работать на 50% газа. Уровень помех при этом максимальный. Провода от аккумулятора до регулятора хода тоже не должны быть слишком длинными, но по другой причине. Если длинные провода от регулятора до электродвигателя создают радиопомехи, то слишком длинные провода от аккумулятора до регулятора создают угрозу для целостности самого регулятора хода.
Вход регулятора всегда шунтируют электролитические конденсаторы большой емкости, демпфирующие броски тока. Тем не менее, производители ограничивают максимально допустимую длину и этих проводов. Если же провода по конструкции модели должны быть длиннее, то в промежутке между регулятором и аккумулятором впаиваются дополнительные электролитические конденсаторы, шунтирующие провода питания. В некоторых случаях для снижения потерь энергии на аккумуляторе полезно добавить такие конденсаторы и с короткими проводами. Радикально это не улучшит работу силовой установки, но несколько процентов энергии за одну гонку прибавит. Поклонники отечественной элементной базы должны учитывать, что зарубежные электролитические конденсаторы обладают намного меньшей инерционностью, чем наши. Если уж хочется сэкономить, то припаяйте параллельно нашему электролиту пленочный конденсатор. Хотя такая замена неравноценна установке специальных импульсных конденсаторов. Бывает, что от механических вибраций шунтирующие вход конденсаторы отламывают свои выводы «под корешок». При замене их на отечественные надо учитывать приведенные выше соображения.
Разъемы. Между регулятором и двигателем провода, как правило, припаиваются, за исключением случаев, когда в конструкции двигателя или регулятора уже заложены разъемы. Между регулятором хода и аккумулятором приходится ставить разъем, потому что аккумулятор на электричке меняется как топливо — от старта к старту на свежезаряженный. Здесь надо применять только специальные модельные разъемы, как правило, в позолоченном исполнении. Обычные электро- или радиотехнические разъемы не рассчитаны на такие огромные токи, какие стали нормой в моделизме. Стык двухполюсный, и обязательно должен иметь механическую защиту от переполюсовки. Помните, регуляторы хода чаще всего не имеют защиты от переполюсовки. Как уже говорилось, практика показывает, что половина сгоревших регуляторов выходят из строя по этой причине. При использовании специальных отдельных разъемов типа гнездо — штекер, защиту делают так: плюс от аккумулятора распаивают на штекер, а минус — на гнездо. У регулятора хода наоборот. В этом случае защита будет обеспечена.
Выключатель. В силовых проводах обычно не делают выключателей. Все регуляторы хода рассчитаны на длительное подключение силовой части при обесточенной сигнальной. Во многих регуляторах с ВЕС имеется отдельный выключатель, который подает питание на приемник и сервомашинки. В выключенном режиме ключи регулятора хода не разряжают (практически) силовой аккумулятор. Хотя, хранить аккумулятор в подключенном состоянии не надо!
Теплоотвод. Несмотря на высокий КПД современных регуляторов хода, на них все же выделяется заметное количество тепла, которое нужно отвести. Для облегчения этой задачи некоторые регуляторы имеет небольшие пластинчатые радиаторы. Размещение регулятора хода на модели должно обеспечивать обдув его корпуса набегающим потоком воздуха. Это правило часто вступает в противоречие с необходимостью защиты регулятора от влаги и грязи на авто- и судомоделях, где их заворачивают в герметичную оболочку. Для разрешения этой проблемы лучше всего брать регуляторы, рассчитанные на меньшее количество витков, а лучше — безлимитные. Их КПД гораздо выше и они рассеивают меньше тепла. Можно, конечно, не обращать внимания на все вышесказанное, и лепить соединения, как вздумается. Но тогда и результат может быть таким:
Многомоторные модели
На моделях с электроприводом гораздо чаще, чем у моделей с ДВС, используются многомоторные силовые установки. Это связано с тем, что электродвигатель, как объект управления, гораздо ближе к идеалу силового привода, чем ДВС. В многомоторных моделях, где необходимо раздельно управлять мощностью двигателей, на каждый из них ставится свой регулятор хода. Но так бывает не у всех моделей. Во многих случаях многомоторность есть дань копийности, либо стремление получить очень большую мощность, которая не может быть обеспечена имеющимися электродвигателями в одиночном варианте. В этом случае для коллекторных моторов совсем не обязательно использовать по отдельному регулятору хода. Вполне допустимо к одному регулятору подключать и несколько электродвигателей. При этом максимально допустимый продолжительный ток регулятора должен превышать суммарный потребляемый ток всех подключенных к нему электродвигателей.
Двигатели подключаются к регулятору хода параллельно друг другу. В таком соединении на частичных режимах их характеристики выравниваются. Как это понимать?
Представьте автомодель, на которой каждое колесо ведущего моста приводится от своего электродвигателя, которые соединены параллельно и подключены к одному регулятору хода. На частичных режимах (неполного газа) выходные мощности и моменты обоих двигателей зависят друг от друга. К примеру, если момент одного из колес уменьшится, — колесо забуксовало, то крутящий момент его электродвигателя также уменьшится, а у другого двигателя — увеличится. Получается автобалансировка по мощности и моменту, аналогичная по сути работе дифференциала повышенного трения — Торсен. Как правило, такое свойство параллельного соединения очень полезно для моделей. На максимальном газу, к сожалению, автобалансировка почти не работает.
При последовательном присоединении моторов к одному регулятору хода их крутящие моменты примерно равны и слабо зависят от степени нагруженности. При буксовании одного из колес на неполном газу, момент другого, более нагруженного, двигателя даже несколько уменьшится. Такая зависимость крайне невыгодна для управляемости модели. Поэтому последовательное соединение на практике почти не используется.
А что же с бесколлекторными двигателями? Для бесколлекторников с датчиками, безусловно, необходимо ставить на каждый двигатель по своему регулятору хода. Для бессенсорных возможно (при определенных условиях) к одному регулятору подключать два двигателя. Главное условие — это благоприятный запуск двигателей, который обеспечивается малым необходимым моментом при пуске двигателей. Многие производители регуляторов хода считают такой режим нештатным, и не дают гарантии на качественную работу их изделий с двумя бесколлекторниками одновременно. Тем не менее, практика показывает вполне успешное использование одного регулятора с двумя двигателями на модели самолета. Теоретически возможный сбой при пуске на практике автором ни разу не наблюдался.
Недопустимо использовать с одним регулятором хода два бесколлекторных двигателя, если их валы жестко связаны друг с другом. К примеру, при работе через шестеренчатый редуктор на общий гребной вал.
Конструктивное исполнение регуляторов хода
Все многообразие конструкции регуляторов хода сейчас выродилось в два типа — регуляторы хода для низковольтных авто- и судомоделей делаются на одной печатной плате, помещенной в полистироловую коробочку с радиатором, или без:
Остальные типы регуляторов исполнены на одной или нескольких печатных платах, собранных в виде бутерброда в пакет и затянутых в термоусаживаемую трубку:
В регуляторах бесколлекторных двигателей на одной плате собрана схема управления, а на остальных — силовые ключи.
С одной и той же платой управления может быть собрано разное количество плат с ключами. Соответственно, разным будет и допустимый ток.
Регуляторы хода могут быть конструктивно объединены на одной плате с другой бортовой электроникой, как это сделано в пикоборте электровертолета:
Производители регуляторов хода
Регуляторы хода выпускает огромное количество моделистских фирм. Есть среди них изделия элитного плана — для спортсменов, а есть и ширпотреб. Соответственно изменяется и цена. Одним из ведущих брендов является фирма «Шульце-электроник». Хорошие регуляторы делает «Контроник», «LRP», «Jeti», «Castle Creations» и куча других. Краткий список сайтов фирм-производителей, специализирующихся на регуляторах хода:
Помимо них, регуляторы хода выпускают почти все крупные производители аппаратуры радиоуправления, а также многие производители автомоделей (Associated, DuraTrax, Traxxas). Многие модельные фирмы, такие как Graupner, Robbe, Great Planes, Global тоже выпускают регуляторы под собственной маркой. Даже наш отечественный «Термик» и то выпускал (сейчас — не знаю) недорогие регуляторы хода.
Рассуждая о качестве изготовления, нужно учитывать, что производитель зачастую сам только разрабатывает изделие (а иногда и это заказывает третьей фирме). Изготовление печатных плат и сборка чаще всего ведутся на Тайване. При этом на самом изделии об этом никаких следов не остается. Слоганы типа «Германское качество» или «Сделано в EU» — чистая реклама.
Принцип действия регуляторов хода
Регулятор хода включается между аккумулятором и силовым электродвигателем. Управление регулятором осуществляет канальный импульс с приемника аппаратуры радиоуправления. Напомним его параметры: период — 20 мс, длительность изменяется от 1 до 2 мс. В простейшем случае в задачу регулятора входит регулирование потока мощности от аккумулятора к двигателю. При длительности канального импульса 1 мс — двигатель выключен, при 2 мс — двигатель развивает максимальную мощность. В промежутке мощность плавно изменяется. Как это происходит?
Прежде чем перейти к структурной схеме регулятора хода, отметим, что сейчас выпускаются исключительно импульсные регуляторы с широтно-импульсным регулированием. Другие варианты регулирования морально устарели и в наше время в моделизме не используются. Поэтому мы о них говорить не будем. Силовые электродвигатели бывают с коллектором и без. Соответственно, регуляторы хода можно разделить на два типа — для коллекторных двигателей и для бесколлекторных двигателей. Некоторые из регуляторов второго типа могут работать и с коллекторными моторами. Но не наоборот! Руководствуясь принципом от простого к сложному, мы расскажем вначале о работе простейшего регулятора коллекторного электродвигателя. Вот типовая структурная схема его включения:
- Г — управляющий генератор;
- К — силовой ключ;
- D — диод;
- М — электродвигатель;
- А — аккумулятор.
Канальный импульс поступает на управляемый генератор импульсов Г. Частота импульсов постоянна, а вот их длительность зависит от длительности входного канального импульса таким образом:
При длительности выходного импульса 0% — на выходе генератора их просто нет — там низкий уровень управляющего ключом сигнала. Ключ К — закрыт, ток через двигатель М не течет.
При длительности выходного импульса 100% от периода на выходе генератора тоже импульсов нет, но уровень управляющего ключом сигнала высокий. Ключ К — открыт и все напряжение от аккумулятора А приложено к двигателю М. Он развивает при этом максимальную мощность.
При промежуточном значении длительности канального импульса на выходе генератора присутствуют импульсы длительностью, определяемой по выше приведенному графику. Скажем, при канальном импульсе 1,5 мс на выходе генератора присутствуют импульсы, длительность которых составляет половину периода. Соответственно, ключ К половину периода открыт, половину — закрыт. Напряжение в т. 1 повторяет эту форму. Дотошный читатель может сказать, что на двигатель энергия подается импульсами, а значит, он должен дергаться и, дергаясь, крутиться в одну сторону. Чтобы понять, почему этого не происходит, придется немного вспомнить устройство и работу коллекторного двигателя постоянного тока. В школе все мы учили, что такой двигатель состоит из магнитного статора и ротора — в простейшем случае проволочной рамки, по которой течет ток. Магнитное поле статора взаимодействует с магнитным полем рамки так, что на нее начинает действовать сила Лоренца, пропорциональная согласно одноименного закона току в рамке. То есть момент ротора пропорционален току, а не напряжению. Обратим внимание, что рамка на магнитном сердечнике ротора обладает заметной индуктивностью L и сопротивлением R. Вспомним также, что коллекторная машина постоянного тока обратима. Если подать на нее напряжение — она работает как двигатель. Если же, наоборот, к ней подключить нагрузку и начать вращать ее ротор, то машина станет генератором, а в нагрузку потечет ток. Так вот, даже когда машина работает как двигатель, в обмотках ее ротора появляется напряжение Е, пропорциональное оборотам ротора. Для чего мы так долго и нудно рассуждали? Для того, чтобы нарисовать эквивалентную схему электродвигателя постоянного тока:
Для тех, кто не знает, что такое эквивалентная схема: вы не найдете в электродвигателе ни отдельной катушки, ни резистора, ни источника напряжения. Каждый миллиметр обмотки содержит и то, и другое, и третье. Собрав отдельно индуктивности, сопротивления и наведенное напряжение, мы получим эквивалентную схему, которая будет работать в цепи точно так, как настоящая обмотка ротора. Теперь посмотрим, как потечет ток через двигатель, когда ключ открыт:
Заметьте, что ток течет против направления напряжения, наведенного в обмотках — это и есть полезная работа тока по вращению ротора. На сопротивлении часть энергии тока превращается в тепло — эта часть вредная, снижающая КПД двигателя. На индуктивности часть энергии запасается в магнитном поле катушки. Источником энергии для всех трех компонент здесь является аккумулятор.
Когда ключ закрывается, ток не прекращает свое движение и схема выглядит так:
Как видите, ток через двигатель продолжает течь в прежнем направлении. Источником энергии для него служит магнитное поле индуктивности, а диод — замыкает цепь в паузе, когда ключ К закрыт.
Поскольку вращающий момент ротора создает ток, а не напряжение на роторе, вам понятно, почему при импульсном питании двигателя двигатель не дрожит. Чтобы индуктивность могла запасать энергию и отдавать ее, ток через нее должен соответственно возрастать и убывать. Для уменьшения пульсаций тока индуктивность должна быть больше (больше суммарная запасенная энергия), а период импульсов меньше — меньше порции энергии, перекачиваемой туда — сюда. Так мы пришли к важнейшему принципу определения необходимой частоты работы регулятора хода. Она должна быть тем больше, чем меньше индуктивность обмоток ротора и больше мощность мотора.
А что будет, если частота генератора ниже оптимальной?
Энергии, запасенной в индуктивности обмоток двигателя в течение импульса, не будет хватать для сглаживания пульсаций тока в паузе между импульсами. Появится заметное дрожание ротора. Но это не страшно. Плохо другое: — уменьшится мощность двигателя, поскольку полезную работу совершает только постоянная компонента импульсного тока. Переменная же будет рассеиваться на магнитопроводе двигателя, нагревая его. Упадет КПД в связке регулятор хода — электродвигатель. Причем виновным окажется неправильно подобранный регулятор хода, а греться будет двигатель.
Техническая реализация
Итак, мы рассмотрели принцип действия простейшего регулятора хода коллекторного модельного двигателя. Из чего и как делаются компоненты рассмотренной блок схемы? Исторический аспект здесь мы упоминать не будем. Управляемый генератор Г во всех без исключения современных регуляторах хода делается на программируемом микроконтроллере. Характеристика зависимости длительности импульсов управления ключом от длительности входного канального импульса формируется программным путем. В качестве коммутирующего силового ключа в регуляторах хода используются исключительно полевые транзисторы с изолированным затвором и каналом вертикальной структуры. За рубежом, да и у нас, их называют MOSFET-транзисторами. Они характеризуются низким сопротивлением в открытом состоянии и высоким быстродействием. В маломощных регуляторах хода может стоять один транзистор. Однако, как правило, для снижения сопротивления в открытом состоянии и увеличения максимального коммутируемого тока в параллель ставится много таких транзисторов — до 16 штук. Чаще всего используются n-канальные транзисторы, поскольку они при равной с p-канальными стоимости имеют меньшее сопротивление в открытом состоянии и больший максимально допустимый ток. В обычных регуляторах используются транзисторы в корпусах ТО-220. В особо миниатюрных, а также регуляторах мощных бесколлекторных двигателей — в корпусе SO-8.
Тормоз. Электродвигатель на больших оборотах обладает приличной кинетической энергией. Как и куда она девается при торможении?
В регуляторах хода, реализующих функцию торможения, помимо ключа, дозирующего подачу энергии на двигатель от аккумулятора, ставится еще один ключ, параллельно двигателю:
Алгоритм функционирования тормозов такой: Когда управляющий канальный импульс находится в положении «Стоп» ключ К закрыт, а ключ К2 открыт. Мы помним, что при вращении ротора коллекторной машины постоянного тока она работает как генератор. Поэтому, если попытаться покрутить ротор двигателя, то вырабатываемая им энергия потечет через ключ К2. Ротор проворачиваться будет, но с заметным усилием, тем большим, чем больше скорость раскрутки ротора. При переводе джойстика передатчика в положение «Ход» начинает работу генератор импульсов регулируемой длительности, открывающий ключ К. Ключ К2 при этом закрывается. Двигатель начинает раскручиваться. Если после этого джойстик передатчика перевести снова в положение «Стоп», то ключ К закрывается, а ключ К2 открывается. Вырабатываемая энергия течет через открытый ключ К2 и превращается в тепло как на сопротивлении ключа, так и на сопротивлении обмоток самого двигателя. Кинетическая энергия ротора быстро перекачивается в тепловую. Поскольку сопротивление ключей маленькое, токи торможения получаются очень большими. На мощных регуляторах, чтобы не допустить перегрузки ключей и двигателя торможение делают не сразу резким, а плавным. Для этого в начале торможения ключ К2 управляется также от генератора импульсов переменной длительности. В низковольтных регуляторах хода в качестве тормозящих ключей чаще используют p-канальные MOSFET-транзисторы, потому что ими проще управлять. При использовании n-канального транзистора для управления делают схему смещения потенциала или ставят специальную микросхему — драйвер ключа. Наряду с возможностью торможения, дополнительный ключ, параллельный двигателю, избавляет от необходимости установки отдельного диода, имевшегося на схемах в начале статьи. Дело в том, что современные силовые MOSFET-транзисторы имеют внутри встроенный интегральный диод, который с успехом справляется. Тормозной ключ также выполняют из нескольких транзисторов, соединенных в параллель. Как правило, их меньше, чем в ключе К. Для гоночных автомоделей некоторые производители встраивают в регулятор хода имитацию ABS-тормозов больших автомобилей. Заключается она в прерывистом торможении. Имитацией потому, что никакого слежения за вращением колес здесь нет. Ее эффективность эквивалентна случаю, когда мы, едучи в настоящем автомобиле по скользкой дороге, прерывисто тормозим. Иногда это выручает. Но это не настоящая ABS.
Реверс. Реверсивные регуляторы хода (нереверсивные регуляторы называют еще прямоходными ) устроены так:
Как видно из схемы, электродвигатель включен в диагональ моста из ключей. При открытии ключей К1 и К3 двигатель вращается в прямом направлении:
а при открытии К2 и К4 — в обратном:
Как правило, в верхних плечах моста используются p-канальные транзисторы, а в нижних n-канальные. К1 либо К2 открыт в течение всего времени вращения двигателя в одном направлении. К3 либо К4 открывается импульсным сигналом регулируемой длительности, который плавно изменяет подаваемую на двигатель мощность. Из соображений экономии, как правило, реверсивные регуляторы делают несимметричными. В плечах моста для прямого хода К1 и К3 ставят в параллель гораздо больше транзисторов, чем в плечах К2 и К4 обратного хода. Чтобы регулятор при этом не сгорел от перегрузки при длительном реверсе, в некоторых регуляторах вводят автоматическое ограничение времени реверса. У одной из линеек реверсивных регуляторов LRP оно составляет около 5 секунд. Этого хватает, чтобы модель автомобиля отъехала назад от препятствия. А ключи перегреться не успеют.
Из схемы включения уже видно, что при равном количестве ключей в каждом плече, прямоходный регулятор обладает вдвое меньшим внутренним сопротивлением, чем реверсивный, хотя заметно дешевле его, так как использует почти вчетверо меньше дорогих MOSFET-транзисторов. К примеру, популярный регулятор серии Квантум от LRP в прямоходном исполнении имеет сопротивление 6 мОм, а в реверсивном 30 (ключей в плече у него меньше). Таким образом, не стоит применять реверсивные регуляторы там, где они не очень нужны. Это — деньги на ветер.
Динамическое торможение в реверсивном регуляторе делается открытием ключей обоих нижних плеч моста при закрытых верхних:
ВЕС. ВЕС представляет из себя чаще всего простейший параметрический стабилизатор на 5 вольт на дискретных элементах, либо в интегральном исполнении (т.н. линейный стабилизатор). Здесь может быть проблема с перегрузкой мощными сервомашинками этого стабилизатора с просадкой напряжения и последующим отказом системы радиоуправления. Подробнее об этом написано в статье про сервомашинки.
Опторазвязка. В мощных регуляторах на повышенные напряжения — от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на входные высокочувствительные цепи приемника. В этом случае типовая входная цепь регулятора выглядит так:
Для развязки используется, как правило, обычный диодно-транзисторный оптрон. В этом случае о ВЕС-системе говорить не приходится, а на модели стоит отдельный бортовой аккумулятор.
Принцип работы регулятора бесколлекторного электродвигателя
Во введении мы упоминали, что на моделях применяются только электродвигатели постоянного тока с возбуждением только от постоянных магнитов и с коллектором или без. Прежде чем перейти к бесколлекторным регуляторам, посмотрим, что делает коллектор в двигателе и чем он плох. В сущности, задача коллекторно-щеточного узла проста: при определенном положении ротора подавать напряжение с аккумулятора на определенные секции его обмоток. Плох же коллектор тем, что он изнашивается, причем тем быстрее, чем больше мощность мотора. Разрушению его элементов помимо простого механического износа способствуют много факторов, к которым можно отнести повышенную температуру, электроэрозионные процессы, загрязнение продуктами износа щеток и т.п. Кроме того, на этот узел приходится значительная часть потерь энергии, снижающей суммарный КПД электродвигателя. Чтобы решить все проблемы разом, придумали передать функции переключения обмоток в зависимости от положения ротора регулятору хода. В электродвигателе обмотки и постоянные магниты поменяли местами. Т.е. на ротор переместились постоянные магниты, а обмотки размещены в пазах неподвижного статора. Все секции обмоток соединены в три группы (три фазы), которые могут присоединяться к регулятору хода звездой или треугольником:
Достоинства обоих видов соединения мы здесь рассматривать не будем, это предмет моторостроения. Помимо этого, в двигатель встраиваются три датчика положения ротора. Они бывают на основе оптопары с открытым оптическим каналом, но чаще — на основе датчиков Холла. Схема включения при этом выглядит так:
Как видите обмотки двигателя, соединенные звездой подключены к трехфазному мосту из ключей К1-К6. Управляет ключами моста специальный контроллер К. Информацию о положении ротора он получает от датчиков Д1-Д3. Контроллер трудно выполнить на основе программируемого микроконтроллера, поскольку для коммутации нужно высокое быстродействие. Поэтому в серийных регуляторах хода бесколлекторных двигателей ставят специализированную микросхему — ASIC (например, в регуляторах фирмы Schulze), либо программируемую логическую интегральную схему — ПЛИС- FPGA (например, в регуляторах фирмы Kontronik). Можно собрать ее и на дискретных элементах, но это сложно и громоздко. В последнее время появились довольно скоростные микроконтроллеры с тактовой частотой в десятки мегагерц. На их основе можно сделать программным путем контроллер для не слишком скоростных электродвигателей. Весьма перспективно формировать контроллер на базе программируемых сигнальных процессоров — DSP. Пример такого решения можно посмотреть здесь: http://www.2mslbldc.g4g-server.com/bauunterlagen.html. Как видно из описания, применение DSP резко упрощает изготовление регулятора хода, низводя его до сложности элементарного регулятора коллекторного двигателя, что очень привлекательно для самостоятельной его сборки.
В контроллере зашито несколько вариантов коммутации, включающих прямой ход, реверс, торможение, отключение обмоток. Что именно должен делать контроллер, ему подсказывает устройство управления У, которое анализирует длительность канального импульса. Здесь же формируются импульсы переменной длительности для регулирования мощности двигателя. Управляют они через контроллер К ключами только нижних плеч трехфазного моста, аналогично реверсивным регуляторам коллекторных двигателей. Устройство У реализуется на обычном микроконтроллере. Силовые ключи, как и в обычных регуляторах хода, формируются из нескольких MOSFET-транзисторов. В одном из регуляторов Kontronik-а в каждом плече стоит по 16 транзисторов. Всего в регуляторе получается 16*6=96 транзисторов! Вот почему они такие дорогие. Чтобы регулятор получился компактным и легким, транзисторы берутся в миниатюрном корпусе SO-8. Для управления таким множеством ключей используют специальные микросхемы-драйверы ключей. Как правило, в регуляторах бесколлекторных двигателей присутствуют все описанные выше сервисно-защитные функции.
Регуляторы хода бесколлекторных бессенсорных электродвигателей
Когда ротор двигателя вращается, в его обмотках наводится напряжение, которое можно использовать для определения положения ротора. Эта идея реализована в регуляторах хода бесколлекторных электродвигателей, которым не нужны датчики положения ротора. Вместо них используются обмотки статора. Типовая схема определения момента коммутации обмотки для одной фазы выглядит так:
В схеме используется компаратор и делители напряжения на резисторах. В качестве компаратора большинство фирм использует микросхему L339. Поскольку на напряжение наводки накладывается поданное с аккумулятора на обмотки тяговое напряжение, результат компарирования необходимо стробировать в контроллере, — принимать только тот переход через 0, который не совпадает по времени с коммутированием обмоток. Впрочем, если это уже не понятно, то не стоит ломать голову. Важно одно: пока ротор не вращается, такое определение положения не работает. Чтобы запустить неподвижный двигатель, вводится режим пуска. Контроллер начинает переключать обмотки последовательно, независимо от положения ротора с небольшой скоростью. Как только ротор сдвинется, появится обратная связь, и двигатель выйдет на режим.
Конструктивно двигатель без датчиков проще, чем с датчиками. Но у этой системы есть и недостатки. Такие электродвигатели плохо стартуют, не развивая с места полного вращающего момента, что, к примеру, для автомоделей крайне важно. При перегрузке на низких оборотах система определения положения ротора без датчиков работает ненадежно. На разных оборотах оптимален разный сдвиг фаз между сигналом обратной связи и моментом коммутации обмоток. Особо продвинутые регуляторы хода это учитывают. В двигателях с датчиками это учитывается автоматически. Наконец, регулятор хода, не требующий датчиков, сложнее и дороже. На летающих моделях применяются в основном бессенсорные двигатели и регуляторы. На автомоделях — с датчиками.
Теоретикам
Для моделистов, которым интересно не только запускать радиоуправляемые модели, но и понимать суть происходящих внутри процессов, может быть интересен данный раздел.
Известно, что внешняя нагрузочная характеристика электродвигателя постоянного тока с возбуждением от постоянных магнитов сильно зависит от режима его питания. Поэтому многие моделисты спрашивают, что именно регулирует импульсный регулятор хода: — напряжение, подаваемое на электродвигатель, или его ток?
Формат статьи не позволяет привести здесь подробные теоретические выкладки. Поэтому перейдем сразу к выводам. Как это ни парадоксально, но с точки зрения нагрузочных характеристик электродвигателя, импульсный регулятор хода эквивалентен примитивному реостатному регулятору, упомянутому во введении к статье. Т.е. импульсный регулятор хода регулирует не напряжение, подаваемое на двигатель, и не его ток. Он регулирует сопротивление источника питания двигателя, а значит, подаваемую на него мощность.
Сразу оговоримся, что идеальный импульсный регулятор хода эквивалентен регулируемому балластному реактивному сопротивлению. Чем реактивный балласт отличается от активного? Тем, что на нем не рассеивается энергия. Действительно, через идеальный регулятор течет ток в те моменты, когда падение напряжения на нем равно нулю. Когда же падение напряжения на регуляторе не равно нулю — ток через него не течет. Поэтому интеграл от произведения мгновенных значений тока на напряжение на любом интервале времени будет равен нулю. Для переменного тока реактивные балласты широко известны и применяются, например, в люминесцентных лампах дневного света. Кстати, за рубежом повсеместно переходят на питание люминесцентных ламп от выпрямленного (постоянного) напряжения через импульсный реактивный балласт, совершенно аналогичный регулятору хода. На нашем сайте как-то предлагался зарядник аккумуляторов с набором реактивных балластов на конденсаторах — типовое решение для простейших сетевых зарядников.
Для электродвигателя без разницы, реактивный или активный балласт регулирует его мощность. Главное — он изменяет сопротивление источника питания двигателя.
Современные модельные электродвигатели обладают довольно жесткой внешней характеристикой при питании от стабильного источника напряжения. Особенно это характерно для двигателей с редкоземельными магнитами. Косвенно коэффициент жесткости внешней нагрузочной характеристики электродвигателя можно оценить по отношению тока заблокированного ротора к току при максимальном КПД. Для ферритовых моторов это значение колеблется около 7-8. Для самарий-кобальтовых и неодимовых моторов, как правило, больше 10.
Однако жесткость нагрузочных характеристик будет наблюдаться только на максимальном газу. По мере уменьшения газа, эквивалентное сопротивление источника для электродвигателя растет, и нагрузочная характеристика двигателя становится мягче. Ток блокировки падает быстрее тока максимального КПД. При этом обороты холостого хода уменьшаются незначительно. Плохо это или хорошо? Смотря для чего. С точки зрения снижения токовых перегрузок на пусковых режимах это неплохо. Мягкая нагрузочная характеристика облегчает плавность регулирования ускорением модели, придает ей этакую вальяжность. Вместе с тем, страдает разгонная динамика. Для гоночных автомобилей на сухом покрытии с хорошим сцеплением полезно иметь силовую установку с хорошей динамикой раскрутки. Чтобы компенсировать умягчение характеристики, в продвинутых автомобильных регуляторах вводят перерегулирование при динамичных перемещениях курка газа. Как это происходит, лучше пояснить на графике движения курка газа передатчика и мощности, подаваемой на двигатель.
Здесь черная линия — команда на управление газом от курка, красная — фактически подаваемая мощность на двигатель.
По внешнему эффекту такое перерегулирование напоминает систему kick-down в крутых автомобилях с автоматической КПП. Там при резкой даче газа автомат переключается на ступень вниз с одновременным обогащением смеси в двигателе на мощностной режим. При этом разгон автомобиля резко улучшается. Величина перерегулирования устанавливается при настройке многофункциональных регуляторов хода в числе других параметров, либо имеется в наборах предустановленных параметров под определенные трассы. На скользком покрытии такое перерегулирование очень вредно, поскольку провоцирует срыв колес в занос. Впрочем, на настоящих автомобилях происходит так же — включение режима kick-down на обледенелой дороге неотвратимо приведет к заносу. У винтовых движителей моделей — гребных и воздушных винтов — нет такой жесткой механической связи со средой, как в автомодели, поэтому для них нет необходимости компенсировать умягчение характеристики электродвигателя.
Заключение
В заключение, о традиционном философском вопросе моделиста — брать готовый регулятор, или делать самому. В отличие от редких случаев успешной самодельной аппаратуры радиоуправления, самодельные регуляторы хода гораздо более распространены. Особенно для обычных коллекторных двигателей. Это изделие принадлежит к той категории электроприборов, которые, будучи грамотно спроектированы и без ошибок смонтированы из заведомо годных деталей, не требуют настройки и регулировки, а работают сразу. Можно ли на этом сэкономить? Можно, и прилично. Поэтому, умеющие держать паяльник в руках, — дерзайте.
По регуляторам бесколлекторных двигателей — это несколько сложнее. Оцените сначала, посильна ли для вас технология их монтажа и сборки? Весьма плотный SMD-монтаж требует специальных навыков работы. Это тоже возможно, но не любыми руками. Да и времени потребует несопоставимо больше. В промышленных условиях монтаж плат ведет автомат, и только сборка плат в пакет идет вручную. Трудно соревноваться с умными машинами.
При самостоятельной разработке оригинальных схем нужно учитывать много особенностей современной силовой электроники. Иначе будет дым и разочарование.
Что касается ремонта регуляторов хода — это дело по силам многим. Автор отремонтировал десятки различных регуляторов как обычных, так и бесколлекторных моторов. Если платы не выгорели в дым — все можно восстановить.
Обсудить на форумеРеверсивное подключение однофазного асинхронного двигателя своими руками. Как изменить вращение асинхронного электродвигателя
Направление движения вращающегося магнитного поля асинхронных электродвигателей зависит от порядка подачи фаз, независимо от того как соединены его статорные обмотки – звездой или треугольником. Например, если фазы A, B, C подать на входные клеммы 1, 2 и 3 соответственно, то вращение пойдет (предположим) по часовой стрелке, а если на клеммы 2, 1, и 3, то против нее. Схема подключения через магнитный пускатель избавит вас от необходимости откручивать гайки в клеммной коробке и производить физическую перестановку проводов.
Трехфазные асинхронные машины на 380 вольт принято подключать магнитным пускателем, в котором три контакта находятся на одной раме и замыкаются одновременно, подчиняясь действию так называемой втягивающей катушки – магнитного соленоида, работающего как от 380, так и от 220 вольт. Это избавляет оператора от близкого контакта с токоведущими частями, что при токах свыше 20 ампер может быть небезопасно.
Для реверсивного пуска используется пара пускателей. Клеммы питающего напряжения на входе соединяются по прямой схеме: 1–1, 2–2, 3–3. А на выходе встречно: 4–5, 5–4, 6–6. Чтобы избежать короткого замыкания при случайном одновременном нажатии двух кнопок «Пуск» на пульте управления, напряжение на втягивающие катушки подается через дополнительные контакты противоположных пускателей. Так, чтобы при замкнутой основной группе контактов линия, которая идет на соленоид соседнего прибора, была разомкнута.
На пульте управления устанавливается трехкнопочный пост с однопозиционными – одно действие за одно нажатие – кнопками: одна «Стоп» и две «Пуск». Разводка проводов в нем следующая:
- один фазный провод подается на кнопку «Стоп» (она всегда нормально замкнута) и перемычками с нее на кнопки «Пуск», которые всегда нормально разомкнуты.
- С кнопки «Стоп» два провода на дополнительные контакты пускателей, которые при их срабатывании замыкаются. Так обеспечивается блокировка.
- С кнопок «Пуск» перекрестно по одному проводу на дополнительные контакты пускателей, которые при их срабатывании размыкаются.
Подробнее о схемах подключения магнитных пускателей для трехфазных электродвигателей читайте .
Реверс однофазных синхронных машин
Для запуска этим моторам необходима вторая обмотка на статоре, в цепь которой включен фазосдвигающий элемент, обычно бумажный конденсатор. Реверсировать можно только те, у которых обе статорных обмотки равнозначны – по диаметру провода, числу витков, а также при условии, что одна из них не отключается после набора оборотов.
Суть схемы реверсирования в том, что фазосдвигающий конденсатор будет подключаться то к одной из обмоток, то к другой. Для примера рассмотрим асинхронный однофазный двигатель АИРЕ 80С2 мощностью 2,2 кВт.
В его клеммной коробке шесть резьбовых выводов, обозначенных литерами с цифрами W2 и W1, U1 и U2, V1 и V2. Чтобы двигатель вращался по часовой стрелке, коммутация производится следующим образом:
- Сетевое напряжение подается на клеммы W2 и V1.
- Концы одной обмотки соединяются с клеммами U1 и U2. Чтобы ее запитать, они соединяются перемычками по схеме U1–W2 и U2–V1.
- Концы второй обмотки подключают к клеммам W2 и V2.
- Фазосдвигающий конденсатор подключают к клеммам V1 и V2.
- Клемма W1 остается свободной.
Чтобы вращение происходило против часовой стрелки, изменяют положение перемычек, они ставятся по схеме W2–U2 и U1– W1. Схема автоматического реверса строится так же на двух магнитных пускателях и трех кнопках – двух нормально разомкнутых «Пуск» и одной нормально замкнутой «Стоп».
Реверс коллекторных двигателей
Схема включения его обмоток аналогична той, что используется в двигателях постоянного тока с последовательным возбуждением. Одна токоснимающая щетка коллектора подключается к обмотке статора, а питающее напряжение подается на другую щетку и второй вывод статорной обмотки.
При изменении положения штепсельной вилки в розетке происходит одновременная переполюсовка магнитов ротора и статора. Поэтому направление вращения не изменяется. Так же, как это происходит в двигателе постоянного тока при одновременном изменении полярности питающего напряжения на обмотке возбуждения и якоря. Изменить порядок следования фаза – ноль надо только в одном элементе электрической машины – коллекторе, который обеспечивает не только пространственное, но электрическое разделение проводников – обмотки якоря изолированы друг от друга. На практике это выполняется двумя способами:
- Физической переменой места установки щеток. Это нерационально, поскольку связано с необходимостью внесения изменений в конструкцию устройства. Кроме того, приводит к преждевременному выходу щеток из строя, поскольку форма выработки на их рабочем конце не совпадает с формой поверхности коллектора.
- Изменением положения перемычки между щеточным узлом и обмоткой возбуждения в клеммной коробке, а также точки подключения сетевого провода. Можно реализовать с помощью одного многопозиционного выключателя или двух магнитных пускателей.
Не забудьте, что все работы по перестановке перемычек в клеммной коробке или подключению схемы реверсирования должны проводиться при полностью снятом напряжении.
Реверсивное подключение однофазового асинхронного мотора своими руками
Перед выбором схемы подключения однофазового асинхронного мотора принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке, как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазового мотора без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб изменить направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно поразмыслить, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.
В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕ
Моторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Как изменить направление вращения трехфазного асинхронного двигателя?
Разберемся, как просто поменять направление вращения трехфазного двигателя на противоположное.
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.
После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.
На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).
Посмотрите на рисунок выше. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно! Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.
Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. КПД при этом тоже оставляет желать лучшего.
Осуществить реверс асинхронного мотора 220В просто, если концы обмоток отводятся из корпуса наружу. Сложнее его организовать, когда выводов всего три. Рассмотренный нами третий способ реверсирования подходит только для кратковременного включения двигателя в сеть. Если работа с обратным вращением обещает быть продолжительной, то мы рекомендуем вскрыть коробку для переключения методами, описанными в 1 и 2 варианте: так безопасно для агрегата, и сохраняется КПД.
sis26.ru
Как изменить направление вращения однофазного асинхронного двигателя
Рис. 1 Схема подключения двигателя однофазного асинхронного двигателя с пусковым конденсатором.
Возьмем за основу уже подключенный однофазный асинхронный двигатель, с направлением вращения по часовой стрелке (рис.1).
На рисунке 1
- точками A, B условно обозначены начало и конец пусковой обмотки, для наглядности к этим точкам подключены провода коричневого и зеленого цвета соответственно.
- точками С, В условно обозначены начало и конец рабочей обмотки, для наглядности к этим точкам подключены провода красного и синего цвета соответственно.
- стрелками указано направление вращения ротора асинхронного двигателя
Изменить направление вращения однофазный асинхронный двигатель в другую сторону – против часовой стрелки. Для этого достаточно переподключить одну из обмоток однофазного асинхронного двигателя – либо рабочую либо пусковую.
Вариант №1
Меняем направление вращения однофазного асинхронного двигателя, путем переподключения рабочей обмотки.
Рис.2 При таком подключении рабочей обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Вариант №2
Меняем направление вращения однофазного асинхронного двигателя, путем переподключения пусковой обмотки.
Рис.3 При таком подключении пусковой обмотки, относительно рис. 1, однофазный асинхронный двигатель будет вращаться в противоположную сторону.
Важное замечание.
Такой способ изменить направление вращения однофазного асинхронного двигателя возможен только в том случае, если на двигателе имеется отдельные отводы пусковой и рабочей обмотки.
Рис.4 При таком подключении обмоток двигателя, реверс невозможен.
На рис. 4 изображен довольно распространенный вариант однофазного асинхронного двигателя, у которого концы обмоток В и С, зеленый и красный провод соответственно, соединены внутри корпуса. У такого двигателя три вывода, вместо четырех как на рис. 4 коричневый, фиолетовый, синий провод.
UPD 03/09/2014 Наконец то удалось проверить на практике, не очень правильный, но все же используемый метод смены направления вращения асинхронного двигателя. Для однофазного асинхронного двигателя, который имеет только три вывода, возможно заставить ротор вращаться в обратном направлении, достаточно поменять местами рабочую и пусковую обмотку. Принцип такого включения изображен на рис.5
Рис. Нестандартный реверс асинхронного двигателя
zival.ru
Как уменьшить обороты электродвигателя схемы и описание | ProElectrika.com
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением (для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Вот так работает хороший регулятор оборотов двигателя:
Изменение скорости вращения вала двигателя в стиральной машине, например, происходит с задействованием обратной связи от таходатчика, поэтому ее обороты при любой нагрузке постоянны.
proelectrika.com
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое, а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
masterxoloda.ru
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
electricdoma.ru
На рисунке представлена электромагнитная схема АД с короткозамкнутой обмоткой ротора в разрезе, включающая статор (1), в пазах которого расположены три фазные обмотки статора (2), представленные одним витком. Начала фазных обмоток A, B, C, а концы соответственно X, Y, Z. В цилиндрическом роторе (3) двигателя расположены стержни (4) короткозамкнутых обмоток, замкнутых по торцам ротора пластинами.
При подаче на фазные обмотки статора трехфазного напряжения в витках обмотки статора протекают токи статора iA , iB , iC , создающие вращающееся магнитное поле с частотой вращения n1 . Это поле пересекает стержни короткозамкнутой обмотки ротора и в них индуцируются ЭДС, направление которых определяется по правилу правой руки. ЭДС в стержнях ротора создают токи ротора i2 и магнитное поле ротора, которое вращается с частотой магнитного поля статора. Результирующее магнитное поле АД равно сумме магнитных полей статор и ротора. На проводники с током i2 , расположенные в результирующем магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарное усиление Fрез , приложенное ко всем проводникам ротора, образует вращающий эле5ктромагнитный момент M асинхронного двигателя.
Вращающий электромагнитный момент М, преодолевая момент сопротивления Мс на валу, принуждает вращаться ротор с частотой n2 . Ротор вращается с ускорением, если момент М больше момента сопротивления Мс , или с постоянной частотой, если моменты равны.
Частота вращения ротора n2 всегда меньше частоты вращения магнитного поля машины n1 , т. к. только в этом случае возникает вращающий электромагнитный момент. Если частота вращения ротора будет равна частоте вращения МП статора, то ЭМ момент равен нулю (стержни ротора не пересекают МП двигателя, и ток равен нулю). Разница частот вращения МП статора и ротора в относительных единицах называется скольжением двигателя:
s = n 1− n 2. n 1
Скольжение измеряется в относительных единицах или процентах по отношению к n1 . В рабочем режиме близком к номинальному скольжение двигателя составляет 0.01-0.06. Частота вращения ротораn 2 = n 1 (1− s ) .
Таким образом, характерной особенностью асинхронной машины является наличие скольжения — неравенства частот вращения магнитного поля двигателя и ротора. Поэтому машину называют асинхронной.
При работе асинхронной машины в двигательном режиме частота вращения ротора меньше частоты вращения МП и 0
Если ротор АД заторможен (s = 1) – это режим короткого замыкания. В случае, если частота вращения ротора совпадает с частотой вращения МП, то вращающий момент двигателя не возникает. Это режим идеального холостого хода.
Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения МП. Для реверса двигателя нужно изменить порядок чередования фаз подведенного напряжения, т. е. Переключить две фазы.
9. Схема замещения и механическая характеристика трехфазного асинхронного двигателя.
Rн =R» —— | ||||||||
Rн =R» —— | ||||||||
E =E» | ||||||||
В схеме асинхронная машина с электромагнитной связью статорной и роторной цепей заменена эквивалентной приведенной схемой замещения. При этом параметры обмотки ротора R2 и x2 приводятся к обмотке статора при условии равенства E1 = E2 » . E2 » , R2 » , x2 » – приведенные параметры ротора.
включенное в обмотку неподвижного ротора, т. е. машина имеет активную нагрузку.
Величина этого сопротивления определяется скольжением, а, следовательно, механической нагрузкой на валу двигателя. Если момент сопротивления на валу двигателя Мс = 0, то скольжение s = 0; при этом величинаR н =∞ и I2 » = 0, что соответствует работе
двигателя в режиме холостого хода.
В режиме холостого хода ток статора равен току намагничивания I 1 =I 0 . Магнитная цепь машины представляется намагничивающим контуром с параметрами x0 , R0 – индуктивное и активное сопротивления намагничивания обмотки статора. Если момент сопротивления на валу двигателя превышает его вращающий момент, то ротор останавливается. При этом величина Rн = 0, что соответствует режиму короткого замыкания.
Первая схема называется Т-образной схемой замещения АД. Она может быть преобразована в более простой вид. С этой целью намагничивающий контурZ 0 = R 0 + jx 0
выносят на общие зажимы. Чтобы при этом намагничивающий ток I 0 не изменял своей величины, в этот контур последовательно включают сопротивления R1 и x1 . В полученной Г- образной схеме замещения сопротивления контуров статора и ротора соединены последовательно. Они образуют рабочий контур, параллельно которому включен намагничивающий контур.
Величина тока в рабочем контуре схемы замещения:
I» 2 = | Где U1 – фазное | |||||||||||||||
» 1 − s 2 | √ (R 1 + | R» 2 | ||||||||||||||
√ (R 1+ R 2+ R 2s | ) +(x 1 +x 2 ) | ) +(x 1 +x 2 ) | ||||||||||||||
напряжение сети.
Электромагнитный момент АД создается взаимодействием тока в обмотке ротора с вращающимся МП машины. Электромагнитный момент М определяется через электромагнитную мощность:
P эм | 2 πn 1 | Угловая частота вращения МП статора. | |||||||||||||
P э2 | m1 I2 » 2 R» 2 | Т. е. ЭМ момент пропорционален мощности электрических | |||||||||||||
ω 1s | |||||||||||||||
ω 1s | |||||||||||||||
потерь в обмотке ротора. | |||||||||||||||
2 R 2″ | |||||||||||||||
2 ω 1 [(R 1 + | ) +(x 1 +X 2 » )2 ] | ||||||||||||||
Приняв в уравнении число фаз двигателя m1 = 3; x1 + x2 » = xк , исследуем его на экстремум. Для этого приравниваем производную dM / ds к нулю и получаем две экстремальные точки. В этих точках момент Мк и скольжение sк называются критическими и соответственно равны:
±R » 2 | ||||||||||
√ R1 2 + sк 2 | Где «+» при s > 0, “-” при s | |||||||||
M к = | 3U 1 2 | |||||||||
2 ω 1 (R 1 ±√ | ||||||||||
R1 2 + Xк 2 | ||||||||||
Зависимость ЭМ момента от скольжения M(s) или от частоты вращения ротора M(n2 ) называется механической характеристикой АД.
Если разделить M на Mк , получим удобную форму записи уравнения механической характеристики АД:
2 Mк (1 + asк ) | ||||||||||||||||
2asк | R2 » | |||||||||||||||
2 Mк | 3 Uф 2 | R2 » | ||||||||||||||
2 ω 1x к | ||||||||||||||||
Реверсивное подключение однофазового асинхронного двигателя своими руками
Перед выбором схемы подключения однофазового асинхронного двигателя принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Схема подключения однофазного двигателя кд-25. Как изменить направление вращения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке , как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазного двигателя без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Как изменить направление вращения однофазного эл. Двигателя?. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб поменять направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно пошевелить мозгами, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.
Читайте так же
В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ
НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕМоторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Подключение однофазного электродвигателя с левого
вращения на правоеПокажу на пальцах, как можно сделать реверс для однофасзного двигателя .
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.
После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Если изменить полярность напряжения на электродвигателе, как показано на рис 3.21 в скобках, то изменения направления вращения (реверса) двигателя не произойдет. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.
Читайте так же
На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).
Посмотрите на рисунок выше. Как изменить направление вращения двигателя — форум. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно! Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.
Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. как изменить направление вращения двигателя его вращения и как поменять. КПД при этом тоже оставляет желать лучшего.
Реверсивное подключение однофазового асинхронного мотора своими руками
Перед выбором схемы подключения однофазового асинхронного мотора принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке, как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазового мотора без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб изменить направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно поразмыслить, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.
В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ
НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕМоторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Как изменить направление вращения трехфазного
асинхронного двигателя ?Разберемся, как просто поменять направление вращения трехфазного двигателя на противоположное.
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.
После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.
На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
Цифровой ШИМ-регулятор оборотов коллекторного мотора. Регулятор вращения двигателя
При использовании электродвигателя в инструментах одна из серьезных проблем — регулировка скорости их вращения. Если скорость недостаточно высока, значит, инструмент недостаточно эффективен.
Если он слишком высокий, то это приводит не только к значительным тратам электроэнергии, но и к возможному выгоранию прибора. Если скорость слишком высока, производительность инструмента также может стать менее предсказуемой.Как это исправить? Для этого принято использовать специальный регулятор скорости.
Электродвигатель для электроинструментов и бытовых приборов обычно относится к одному из двух основных типов:
- Коллекторные двигатели.
- Двигатели асинхронные.
В прошлом наиболее распространенной была вторая из этих категорий … Сейчас около 85% двигателей, которые используются в электроинструментах, бытовой или кухонной технике, относятся к коллекторному типу.Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими проще.
Работа любого электродвигателя основана на очень простом принципе: если прямоугольная рамка помещена между полюсами магнита, который может вращаться вокруг своей оси, и через нее пропускается постоянный ток, то рамка будет перемена. Направление вращения определяется по «правилу правой руки».
Этот шаблон можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку он вращается, для этого используются специальные скользящие контакты. После поворота рамы на 180 градусов через эти контакты ток течет в обратном направлении. Таким образом, направление вращения остается прежним. При этом плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство
Коллекторный двигатель обычно состоит из ротора (якоря), статора, щеток и тахогенератора:
- Ротор — вращающаяся часть, статор — внешний магнит.
- Щетки из графита — это основная часть скользящих контактов, через которую подается напряжение на вращающийся якорь.
- Тахогенератор Устройство, контролирующее характеристики вращения. В случае нарушения равномерности движения он корректирует напряжение, поступающее в двигатель, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также вместо статических магнитов здесь могут использоваться катушки электромагнита.Такой мотор может работать как от постоянного, так и от переменного тока.
Легкость регулировки скорости коллекторного двигателя определяется тем, что скорость вращения напрямую зависит от величины приложенного напряжения.
Кроме того, важной особенностью является то, что ось вращения может быть прикреплена непосредственно к вращающимся инструментам без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Электродвигатели щеточные постоянного тока.
- Щеточные электродвигатели переменного тока.
В данном случае речь идет о том, каким током питаются электродвигатели.
Классификация также может производиться по принципу возбуждения двигателя. В устройстве коллекторного двигателя питание подается как на ротор, так и на статор двигателя (если в нем используются электромагниты).
Разница в том, как организованы эти соединения.
Принято различать:
- Параллельное возбуждение.
- Постоянное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
А теперь поговорим о том, как можно регулировать частоту вращения коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то для этого вполне подходят любые средства регулировки, способные выполнять эту функцию.
Перечислим некоторые из этих вариантов, например:
- Автотрансформатор лабораторный (ЛАТР).
- Заводские платы регулировки используются в бытовой технике (в частности, можно использовать те, которые используются в миксерах или пылесосах).
- Пуговицы , используемые при конструировании электроинструментов.
- Бытовые регуляторы освещения с плавным действием.
Однако все вышеперечисленные методы имеют очень важный недостаток. Вместе со снижением скорости уменьшается и мощность мотора. В некоторых случаях его можно остановить даже рукой.В некоторых случаях это может быть приемлемо, но по большей части это серьезное препятствие.
Хороший вариант — регулировать скорость с помощью тахогенератора. Обычно устанавливается на заводе. В случае отклонений скорости вращения двигателя на двигатель передается уже скорректированное питание, соответствующее требуемой скорости. Если в эту схему встроено управление вращением двигателя, то потери мощности не будет.
Как выглядит конструктивно? Наиболее распространен реостат регулирования вращения, выполненный на основе использования полупроводников.
В первом случае речь идет о переменном сопротивлении с механической регулировкой. Он подключен последовательно к коллекторному двигателю. Недостаток — дополнительное тепловыделение и дополнительная трата времени автономной работы. При таком способе регулировки происходит потеря мощности вращения двигателя. Это дешевое решение. Не применимо для достаточно мощных двигателей по указанным причинам.
Во втором случае при использовании полупроводников двигатель управляется подачей определенных импульсов.Схема может изменять длительность таких импульсов, что, в свою очередь, изменяет скорость вращения без потери мощности.
Как сделать самому?
Существуют различные варианты настройки схемы. Приведем более подробно один из них.
Вот как это работает:
Изначально это устройство предназначалось для регулировки коллекторного двигателя электромобилей. Это был примерно такой, где напряжение питания составляет 24 В, но такая конструкция применима и к другим двигателям.
Слабым местом схемы, которое было выявлено в ходе испытаний ее работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы элементов транзисторной схемы.
Рекомендуется, чтобы сила тока была не более 70 А. В этой схеме нет защиты по току или температуре, поэтому рекомендуется встроить амперметр и контролировать ток визуально. Частота коммутации составит 5 кГц, она определяется конденсатором С2 емкостью 20 нФ.
При изменении силы тока эта частота может изменяться от 3 кГц до 5 кГц. Переменный резистор R2 используется для регулировки тока. При использовании электродвигателя в бытовых условиях рекомендуется использовать регулятор стандартного типа.
При этом рекомендуется подбирать значение R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, затем — на транзисторы.
Печатная плата размером 50 на 50 мм изготовлена из одностороннего стеклопластика:
На этой схеме дополнительно показаны 2 резистора на 45 Ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения устройства. При использовании электродвигателя в качестве нагрузки необходимо блокировать схему блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению напряжения питания.
Работа прибора без такого диода может привести к поломке из-за возможного перегрева. В этом случае диод необходимо разместить на радиаторе. Для этого можно использовать металлическую пластину площадью 30 см2.
Регулирующие ключи работают таким образом, что потери мощности на них достаточно малы. V В оригинальной схеме использовался стандартный компьютерный вентилятор. Для его подключения использовалось ограничивающее сопротивление 100 Ом и напряжение питания 24 В.
Устройство в сборе выглядит так:
При изготовлении блока питания (на нижнем рисунке) провода должны быть подключены таким образом, чтобы в тех проводниках, по которым проходят большие токи, было минимум перегибов. Мы видим, что изготовление такого устройства требует определенных профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл использовать купленное устройство.
Критерии выбора и стоимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, необходимо иметь хорошее представление о типах таких устройств:
- Различные виды управления. Система управления может быть векторной или скалярной. Первые используются чаще, а вторые считаются более надежными.
- Мощность регулятора должна соответствовать максимально возможной мощности двигателя.
- По напряжению удобно выбирать прибор, обладающий максимально универсальными свойствами.
- Частотные характеристики. Регулятор, который вам подходит, должен соответствовать самой высокой частоте, которую использует двигатель.
- Прочие характеристики. Здесь речь идет о размере гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств цены на регуляторы могут существенно различаться.
По большей части они находятся в пределах примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор скорости KA-18 ESC разработан для моделей в масштабе 1:10. Стоит 6890 руб.
- Регулятор скорости MEGA коллектор (водонепроницаемый).Стоит 3605 руб.
- Регулятор скорости для моделей LaTrax 1:18. Его цена 5690 рублей.
Электродвигатель необходим для плавного разгона и замедления. Широкое применение такие устройства получили в промышленности. С их помощью изменяют скорость конвейерных лент и вращение вентиляторов. Двигатели на 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, изменяющие скорость вращения вентилятора печки в автомобилях.Это один из видов регуляторов. Только он не предназначен для плавного запуска. Скорость вращения изменяется ступенчато.
Применение преобразователей частоты
Преобразователи частоты используются в качестве регуляторов скорости и 380В. Это высокотехнологичные электронные устройства, позволяющие кардинально изменять характеристики тока (форму волны и частоту). В их основе лежат мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа устройства контролируется блоком на микроконтроллере.Изменение скорости вращения ротора двигателя плавное.
Следовательно, они используются в нагруженных механизмах. Чем медленнее ускорение, тем меньше нагрузка на конвейер или коробку передач. Все частотники оснащены несколькими степенями защиты — по току, нагрузке, напряжению и другими. Некоторые модели преобразователей частоты питаются от однофазного напряжения (220 Вольт), от него делают трехфазное. Это позволяет подключать асинхронные двигатели в домашних условиях без использования сложных схем… И мощность не пропадет при работе с таким устройством.
Для каких целей используются регуляторы?????? его можно уменьшить на 20-30%, а это вдвое снизит затраты на электроэнергию.
Схема построения преобразователей частоты широко распространена во многих бытовых приборах. Нечто подобное можно найти в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядных устройствах для телефонов, блоках зажигания ламп подсветки для современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
Регулятор скорости электродвигателя можно сделать своими руками, но для этого потребуется изучить все технические моменты… Конструктивно можно выделить несколько основных узлов, а именно:
- Электродвигатель.
- Микроконтроллерная система управления и преобразователь.
- Привод и связанные с ним механизмы.
В самом начале работы после подачи напряжения на обмотки ротор двигателя вращается с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому добавляется нагрузка от приводимого в движение механизма.В результате на начальном этапе мощность и потребление тока возрастают до максимума.
Вырабатывается много тепла. Обмотки и провода перегреваются. Избавиться от этого поможет использование преобразователя частоты. Если выставить плавный пуск, то до максимальной скорости (которая тоже регулируется прибором и может быть не 1500 об / мин, а всего 1000) двигатель будет разгоняться не сразу, а на 10 секунд (прибавить 100-150 об / мин. каждую секунду). При этом значительно снизится нагрузка на все механизмы и провода.
Самодельный регулятор
Самостоятельно изготовить регулятор оборотов мотора 12В. Для этого требуется многопозиционный переключатель и резисторы с проволочной обмоткой. С помощью последнего изменяется напряжение питания (а вместе с ним и скорость). Подобные системы можно использовать для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы — на базе зубчатых передач или вариаторов. Но они не были очень надежными. Электронные средства показывают себя намного лучше. Ведь они не такие уж и громоздкие и позволяют производить тонкую настройку привода.
Для производства регулятора вращения электродвигателя необходимо несколько электронных устройств, которые можно купить в магазине или снять со старых инверторных устройств. Хорошие результаты показывает симистор VT138-600 в схемах подобных электронных устройств. Чтобы произвести регулировку, вам потребуется включить в схему переменный резистор. С его помощью изменяется амплитуда сигнала, поступающего на симистор.
Внедрение системы управления
Для улучшения параметров даже самого простого устройства потребуется включение микроконтроллерного управления в схему регулятора скорости двигателя.Для этого нужно выбрать процессор с подходящим количеством входов и выходов — для подключения датчиков, кнопок, электронных ключей … Для экспериментов можно использовать микроконтроллер AtMega128 — самый популярный и простой в использовании. В открытом доступе можно найти множество схем, использующих этот контроллер. Найти их самостоятельно и применить на практике не составит труда. Чтобы он работал правильно, нужно записать в него алгоритм — реакцию на определенные действия. Например, при достижении температуры 60 градусов (измерение происходит на радиаторе прибора) должно произойти отключение электроэнергии.
Наконец-то
Если вы решили не делать прибор самостоятельно, а приобрести уже готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частота. Желательно рассчитать характеристики механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте согласовать с параметрами преобразователя частоты.
Всем привет, наверное, у многих радиолюбителей, как у меня, не одно хобби, а несколько.Помимо разработки электронных устройств, я занимаюсь фотографией, видеосъемкой на зеркалку и монтажом видео. Как видеооператору мне понадобился слайдер для видеосъемки, и сначала я вкратце объясню, что это такое. На фото ниже представлен заводской слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Они аналогичны рельсовой системе, используемой в широкоэкранном кино. С его помощью создается плавное движение камеры вокруг снимаемого объекта.Еще один очень мощный эффект, который можно использовать при работе с ползунком, — это возможность приближаться или дальше от объекта. На следующем фото показан двигатель, который я выбрал для создания слайдера.
Ползунок приводится в движение двигателем постоянного тока на 12 В. В Интернете была найдена схема регулятора двигателя, который перемещает каретку ползуна. На следующем фото индикатор питания на светодиоде, тумблер, управляющий реверсом, и выключатель питания.
При работе с таким устройством важно обеспечить плавное регулирование скорости плюс небольшое включение реверса двигателя.Скорость вращения вала двигателя, в случае использования нашего регулятора, плавно регулируется поворотом ручки переменного резистора на 5 кОм. Возможно, не только я являюсь одним из пользователей этого сайта, увлекающимся фотографией, но и кому-то еще захочется повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. . На следующем рисунке изображена принципиальная схема регулятора двигателя:
.Цепь регулятора
Схема очень проста и легко собирается даже начинающим радиолюбителям.Из плюсов сборки данного устройства могу назвать его невысокую стоимость и возможность настройки под свои нужды. На рисунке изображена печатная плата регулятора:
Но одними лишь ползунками сфера применения этого регулятора не ограничивается, его легко можно использовать в качестве регулятора скорости, например, сверлильного станка, самодельного дремеля с питанием от 12 вольт или компьютерного кулера, например, с габаритами 80 х 80 или 120 х 120 мм. Еще я разработал схему реверса двигателя, то есть быстрого изменения вращения вала в другую сторону.Для этого я использовал тумблер с шестью контактами на 2 положения. На следующем рисунке показана схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-), подключаются к контактам на плате, обозначенным M1.1 и M1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры при снижении напряжения питания и, соответственно, скорости издают гораздо меньше шума при работе. На следующем фото транзистор КТ805АМ на радиаторе:
Практически любой транзистор среднего и большого размера может быть использован в схемах питания n-p-n структур.Также диод можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом при обратном подключении, это было сделано для защиты транзистора в моменты включения и выключения цепи, так как наш двигатель является индуктивной нагрузкой. Также в схеме предусмотрена индикация включения ползунка на светодиоде, включенном последовательно с резистором.
При использовании двигателя с большей мощностью, чем показано на фото, транзистор необходимо прикрепить к радиатору для улучшения охлаждения.Фотография получившейся платы представлена ниже:
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
% PDF-1.4 % 956 0 объект > эндобдж xref 956 126 0000000016 00000 н. 0000002891 00000 н. 0000003123 00000 н. 0000003275 00000 н. 0000003314 00000 н. 0000003372 00000 н. 0000003437 00000 н. 0000004263 00000 н. 0000004600 00000 н. 0000004667 00000 н. 0000004767 00000 н. 0000004873 00000 н. 0000005037 00000 н. 0000005097 00000 н. 0000005290 00000 н. 0000005383 00000 п. 0000005475 00000 н. 0000005594 00000 н. 0000005712 00000 н. 0000005819 00000 н. 0000005930 00000 н. 0000006036 00000 н. 0000006148 00000 п. 0000006255 00000 н. 0000006366 00000 н. 0000006472 00000 н. 0000006577 00000 н. 0000006696 00000 н. 0000006813 00000 н. 0000006922 00000 н. 0000007055 00000 н. 0000007230 00000 н. 0000007428 00000 н. 0000007547 00000 н. 0000007657 00000 н. 0000007790 00000 н. 0000007953 00000 н. 0000008112 00000 н. 0000008254 00000 н. 0000008427 00000 н. 0000008533 00000 н. 0000008616 00000 н. 0000008713 00000 н. 0000008810 00000 н. 0000008977 00000 н. 0000009076 00000 н. 0000009241 00000 н. 0000009360 00000 п. 0000009553 00000 п. 0000009689 00000 н. 0000009853 00000 п. 0000010046 00000 п. 0000010252 00000 п. 0000010388 00000 п. 0000010564 00000 п. 0000010741 00000 п. 0000010883 00000 п. 0000011025 00000 п. 0000011208 00000 п. 0000011320 00000 п. 0000011460 00000 п. 0000011568 00000 п. 0000011729 00000 п. 0000011884 00000 п. 0000011999 00000 н. 0000012111 00000 п. 0000012231 00000 п. 0000012352 00000 п. 0000012486 00000 п. 0000012607 00000 п. 0000012727 00000 п. 0000012848 00000 п. 0000012969 00000 п. 0000013091 00000 п. 0000013212 00000 п. 0000013333 00000 п. 0000013431 00000 п. 0000013528 00000 п. 0000013624 00000 п. 0000013720 00000 п. 0000013816 00000 п. 0000013913 00000 п. 0000014010 00000 п. 0000014107 00000 п. 0000014204 00000 п. 0000014301 00000 п. 0000014398 00000 п. 0000014495 00000 п. 0000014592 00000 п. 0000014689 00000 п. 0000014787 00000 п. 0000014885 00000 п. 0000014983 00000 п. 0000015080 00000 п. 0000015242 00000 п. 0000015399 00000 п. 0000015704 00000 п. 0000015916 00000 п. 0000016683 00000 п. 0000016707 00000 п. 0000017874 00000 п. 0000017897 00000 п. 0000018916 00000 п. 0000019572 00000 п. 0000019795 00000 п. 0000019819 00000 п. 0000021094 00000 п. 0000021118 00000 п. 0000022390 00000 п. 0000022414 00000 п. 0000023701 00000 п. 0000023725 00000 п. 0000024968 00000 п. 0000025495 00000 п. 0000025717 00000 п. 0000026484 00000 п. 0000026703 00000 п. 0000026727 00000 н. 0000028023 00000 п. 0000028047 00000 п. 0000029236 00000 п. 0000029377 00000 п. 0000029584 00000 п. 0000029803 00000 п. 0000003478 00000 н. 0000004240 00000 н. трейлер ] >> startxref 0 %% EOF 957 0 объект > эндобдж 958 0 объект a_
Контроль и измерение скорости двигателя постоянного тока
При тестировании скорости двигателя постоянного тока к двигателю применяется ШИМ, и его рабочий цикл изменяется от минимального до максимального.При применении ШИМ фактическое число оборотов двигателя постоянного тока также измеряется и записывается, чтобы увидеть, как изменяется скорость двигателя (об / мин) при изменении ширины ШИМ. Наряду с этим также измеряется приложенное к двигателю напряжение, чтобы увидеть скорость двигателя при разном приложенном напряжении. Точнее, после записи всех значений готовится таблица наблюдений для ширины импульса (рабочего цикла), приложенного напряжения и скорости двигателя в оборотах в минуту. Эта таблица используется для подготовки графика рабочего цикла -> числа оборотов или приложенного напряжения -> графика числа оборотов двигателя.
Данный проект демонстрирует приведенный выше пример.Он применяет ШИМ к двигателю постоянного тока для непрерывного изменения его скорости от минимальной до максимальной и от максимальной до минимальной, а также измеряет следующие параметры
1) Ширина ШИМ в%
2) Подаваемое напряжение на двигатель
3) Скорость двигателя в об / мин
Он использует плату Arduino UNO для генерации ШИМ и измерения / расчета более 3 параметров. Эти параметры отображаются на ЖК-дисплее 16×4. С помощью Arduino очень легко изменять скорость двигателя постоянного тока. Arduino может генерировать ШИМ на своем аналоговом выходном выводе, и когда он применяется к двигателю постоянного тока, его скорость изменяется.Так что это очень простая и легкая задача. Для измерения частоты вращения используется датчик оптопрерывания MOC7811. Когда двигатель совершает 1 оборот, датчик генерирует 1 импульс, и такие импульсы рассчитываются Arduino для расчета числа оборотов в минуту. Итак, давайте посмотрим, как это делается. Начнем сначала с принципиальной схемы, а затем ее описания и работы.
Принципиальная схема: Описание схемы:Как показано на рисунке, схема построена с использованием платы разработки Arduino UNO, ЖК-дисплея 16×4, транзистора Дарлингтона NPN TIP122 и оптического датчика прерывания MOC7811.
· Аналоговый выходной контакт 9 Arduino управляет двигателем постоянного тока 12 В при 2000 об / мин через TIP122. Этот вывод подключается к базовому входу TIP122 через токоограничивающий резистор R2, а двигатель постоянного тока подключается к коллектору TIP122
. На внутренний ИК-светодиод MOC7811 подается прямое смещение с использованием источника питания 5 В от платы Arduino через токоограничивающий резистор R1. Внутренний фототранзистор подтягивается резистором R4. Коллекторный выход транзистора подключен к цифровому выводу 7 или Arduino
. Выводы данных ЖК-дисплея с D4 по D7 подключены к цифровым выводам 5, 4, 3 и 2 Arduino, а выводы управления Rs и En подключены к 12 и 11.Вывод RW подключен к земле. Вывод Vcc и вывод LED + подключены к источнику питания 5 В от платы Arduino, а вывод Vss и выводы LED- подключены к земле платы Arduino
· Один потенциометр подключен к выводу Vee для изменения контрастности ЖК-дисплея
Работа схемы:· Сначала на двигатель подается напряжение 12 В от внешнего источника питания. Затем плата Arduino, ЖК-дисплей и датчик получают питание через USB от ПК / ноутбука
· Первоначально ЖК-дисплей показывает разные параметры, как
PWM ip:
PWM Duty:
PWM volt:
speed:
· Затем arduino начинает применять ШИМ к двигателю с максимальной шириной импульса
· Таким образом, двигатель начнет вращаться с максимальной скоростью.Предусмотрена некоторая временная задержка, позволяющая двигателю достичь полной скорости
· Когда двигатель начинает вращаться, шлицевое колесо, прикрепленное к его валу, также будет вращаться.
· Датчик MOC7811 расположен таким образом, что паз колеса проходит через датчик воздушный зазор. Таким образом, когда двигатель совершает один полный оборот, паз проходит через зазор датчика. Из-за прорези в колесе ИК-свет падает на фототранзистор. Таким образом, транзистор проводит и генерирует отрицательный импульс на выходе коллектора. Таким образом, каждое вращение двигателя производит импульс
· Частота этих импульсов фактически равна RPS (-оборотов в секунду) двигателя.Чтобы измерить частоту этого импульса, сначала измеряется время включения, затем измеряется время выключения, которое рассчитывается исходя из этой частоты как
Период времени = Ton + Toff (в нас)
Частота = 1000000 / период времени
· Эта частота скорость двигателя в RPS. Исходя из этого RPS, скорость двигателя рассчитывается в RPM как
RPM = 60 × RPS
· Вход ШИМ изменяется от 250 до 100 с шагом 15. Это напрямую отображается на ЖК-дисплее
· Время включения и выключения время выхода ШИМ также измеряется для расчета рабочего цикла ШИМ как
Продолжительность ШИМ = [PWM_Ton / (PWM_Ton + PWM_Toff)] × 100
· Наконец, напряжение, приложенное к двигателю, рассчитывается как
Напряжение, приложенное к двигателю = напряжение двигателя × режим
= (12/100) × режим
· Сначала вход ШИМ уменьшается с 250 до 100 за 10 шагов по 15, а затем снова увеличивается со 100 до 250, и этот цикл повторяется непрерывно
· Итак скорость двигателя непрерывно уменьшается, а затем непрерывно увеличивается.Мы можем наблюдать изменение скорости двигателя, которое отображается на ЖК-дисплее как скорость в об / мин.
Таким образом, данный проект изменяет скорость двигателя постоянного тока, а также точно ее измеряет. Он отображает% ширины импульса, приложенного к двигателю, вместе с приложенным напряжением. Таким образом, можно записать скорость двигателя в об / мин при разном напряжении и ширине импульса в таблице наблюдений для дальнейших нужд.
Глоссарий терминов по промышленному оборудованию
Acceleration / Deceleration Скорость изменения скорости во времени; ускорение относится к увеличению скорости, в то время как замедление относится к уменьшению скорости.Обычно выражается в радианах / сек / сек. Потенциометры подстроечного резистора, установленные на плате, позволяют пользователям регулировать время, необходимое двигателю для достижения заданной скорости.
Привод Устройство, которое преобразует различные формы энергии при вводе во вращательное или линейное механическое движение, такое как двигатель.
Воздушный зазор Область между вращающимися и неподвижными элементами электродвигателя.
Переменный ток (AC) Поток электрического тока, обычно генерируемый коммунальными предприятиями с частотой 60 Гц, который постоянно меняет направление в середине своего цикла.Математически это следует за синусоидой; он движется от нуля, затем достигает максимума в одном направлении, уменьшается до нуля, затем меняет направление, достигая максимума в противоположном направлении.
Температура окружающей среды Температура среды, обычно воздуха, вокруг такого устройства, как двигатель или привод.
Ампер (AMP) Стандартная единица измерения электрического тока или скорости потока электронов. Электрическая цепь с замкнутым контуром с разностью потенциалов в один вольт на сопротивлении в один Ом вызывает протекание тока в один ампер.
Якорь Якорь — это вращающийся элемент электродвигателя. В щеточных двигателях постоянного тока он состоит из основных токоведущих обмоток (проводников) в роторе. Коммутатор переключает питание обмоток якоря для создания магнитного поля.
Противоэдс. Также известное как противоэдс (cemf), это напряжение, возникающее на обмотках двигателя из-за того, что витки обмотки отсекаются магнитным полем во время вращения двигателя.Обратная ЭДС прямо пропорциональна скорости ротора и противоположна по полярности приложенному напряжению. Это статическое напряжение возникает в результате работы генератора в двигателе, даже если обмотки двигателя не находятся под напряжением.
Люфт В механической системе люфт — это относительное движение между двумя устройствами, соединенными муфтой, шестерней, винтом и т. Д.
Мостовой выпрямитель Секция привода постоянного тока, которая преобразует источник переменного тока в источник постоянного тока.
Щетки Токопроводящий материал, обычно углерод или графит, который лежит непосредственно на коммутаторе щеточного двигателя постоянного тока. Они передают ток от источника питания к якорю.
Конденсатор Устройство, которое удерживает электрический заряд в течение определенного периода времени, предотвращает протекание постоянного тока и позволяет протекать переменному току. Эти компоненты служат фильтрами в приводах постоянного тока, чтобы обеспечить более чистый сигнал постоянного тока для двигателя.
Шасси Открытая конструкция привода для установки в имеющийся у заказчика корпус или консоль управления.
Дроссель Фильтрующее устройство, состоящее из катушки индуктивности и резистора. Хотя они более дорогие, чем обычный RC-фильтр, они обладают лучшими характеристиками.
Closed-loop Система, которая использует информацию обратной связи для регулирования выходной характеристики. Выходные данные возвращаются контроллеру для сравнения с входной командой; любая разница приводит к соответствующему изменению входной команды.Таким образом, точность увеличивается.
Cogging Зубчатость означает вращение вала рывками или скачками, а не плавное непрерывное движение. Неравномерное (резкое) вращение является следствием склонности якоря к определенным дискретным угловым положениям. Взаимодействие катушек якоря, входящих и выходящих из магнитных полей, создаваемых катушками возбуждения или постоянными магнитами, вызывает изменения скорости. Якорь имеет тенденцию ускоряться и замедляться, поскольку он прорезает поля во время вращения.Зубцы очень заметны на низких скоростях и определяют диапазон скоростей двигателя.
Коммутатор Устройство, установленное на валу якоря и состоящее из нескольких клиновидных медных сегментов, расположенных вокруг вала. Эти сегменты изолированы от вала и друг от друга. Щетки двигателя перемещаются по периферии коллектора и электрически соединяют и переключают катушки якоря с источником питания.
Проводник Любой материал, например медь или алюминий, который оказывает небольшое сопротивление прохождению электрического тока.
Current Limit (Ограничение момента) Эта функция позволяет оператору регулировать максимальный ток, который может потреблять двигатель. Это, по сути, ограничивает максимальный крутящий момент, создаваемый двигателем.
Динамическое торможение Способ быстрой остановки двигателя путем отключения источника питания. Вращающийся двигатель становится генератором. При подключении к резистору энергия вращения рассеивается в резисторе в виде тепла.
Рабочий цикл Отношение времени работы к общему времени цикла двигателя.Двигатель может работать в непрерывном режиме, если он продолжает работать в течение неопределенного времени, а его нормальная рабочая температура остается в пределах температурных пределов его системы изоляции. Двигатель может работать в прерывистом режиме, если он никогда не достигает постоянной температуры, но ему дают остыть в перерывах между операциями.
Корпус Описание двигателя или корпуса привода. Выбранный корпус зависит от условий окружающей среды и тепла, выделяемого устройством.
Фильтр Электрическое устройство, используемое для подавления электрических помех или для улучшения выхода постоянного тока на двигатель постоянного тока.
Обратный диод Это сверхбыстрый восстанавливающийся диод, который нейтрализует скачки тока и напряжения в результате быстрых переходных процессов, которые возникают при быстром включении и выключении IGBT и MOSFET. Форм-фактор Форм-фактор показывает, какая составляющая переменного тока присутствует на выходе постоянного тока от приводов постоянного тока. Представляется математически как отношение среднеквадратичного текущего значения сигнала к его среднему текущему значению.Любое значение форм-фактора больше единицы означает, что часть тока производит тепло вместо крутящего момента.
Четыре квадранта Этот термин относится к способности привода управлять скоростью и крутящим моментом двигателя в любом направлении вращения. Направление крутящего момента может быть противоположным направлению скорости для приложений, требующих торможения или замедления. Одноквадрантные приводы, с другой стороны, создают крутящий момент и скорость только в одном и том же направлении вращения.
Частота Частота означает, как часто полный цикл происходит в единицу времени. Частота обычно измеряется в циклах в секунду или в герцах, где 1 цикл в секунду равен 1 Гц. Стандартный источник питания переменного тока в США — 60 Гц, а 50 Гц остается распространенным во многих других странах мира.
Трение Сопротивление движению между поверхностями.
Предохранитель Устройство, подключенное к электрической цепи, предназначенное для плавления и размыкания цепи в случае протекания избыточного тока.Редуктор Механическое устройство, которое преобразует скорость и крутящий момент в значения, требуемые приложением. Выходной крутящий момент увеличивается, а выходная скорость уменьшается пропорционально передаточному отношению. Генератор Машина, преобразующая механическую энергию в электрическую.
Датчик эффекта Холла Эти устройства обратной связи, обычно используемые в бесщеточных двигателях, предоставляют усилителю информацию для электронной коммутации двигателя. Датчики генерируют коммутирующие сигналы, определяя положение намагниченного колеса на роторе.
лошадиных сил Скорость, с которой выполняется работа. Он равен скорости, умноженной на крутящий момент, и константе, в зависимости от выбранных единиц.
Индуктивность Свойство электрической цепи, которое представляет ее способность противостоять изменениям тока.
Инерция Функция массы и формы объекта. Инерция представляет собой свойство объекта сопротивляться изменению движения.Инерция объекта возрастает непосредственно с увеличением массы объекта; Кроме того, увеличивающиеся инерционные нагрузки требуют большей силы для их ускорения и замедления.
Инвертор(частотно-регулируемые приводы) Привод переменного тока, который изменяет частоту и напряжение, подаваемое на двигатель переменного тока, для изменения скорости двигателя.
IR Compensation Изменяет напряжение на якорь в ответ на изменения тока (нагрузки). Он регулируется с помощью потенциометра подстроечного резистора, установленного на борту.
Затвор биполярного транзистора с изолированным затвором (IGBT) Силовой транзистор с затвором, аналогичным базе BJT. Отличие в том, что затвор электрически изолирован от цепи коллектор-эмиттер. Это позволяет проводить высокие напряжения и токи.
Толчковый режим Эта функция позволяет мгновенно переместить двигатель на скорость, отличную от нормальной (обычно более медленную). Операторы получают доступ к этой функции через отдельный вход управления.
Нагрузка Термин, используемый для описания работы от двигателя для привода оборудования, прикрепленного к валу. Обычно определяется в лошадиных силах или крутящем моменте при определенной скорости.
Mosfet Металл-оксид-полупроводник-полевой транзистор аналогичен стандартным полевым транзисторам. МОП-транзисторы могут быть типа N или P. Они будут или не будут проводить от истока к стоку, если на затвор полевого МОП-транзистора не будет подано напряжение. У них есть возможность включения и выключения, а также быстрое время реакции.
NEMA Аббревиатура расшифровывается как Национальная ассоциация производителей электрооборудования. Агентство предоставляет стандарты спецификаций для двигателей и приводов.
Шум (EMI / RFI) Электрические помехи, мешающие правильной передаче электрических сигналов. Шум может отрицательно сказаться на производительности системы.
Энергонезависимая память. Система хранения в памяти, которая сохраняет информацию во время отключения питания.Ом Единица электрического сопротивления цепи, в которой разность потенциалов в один вольт создает ток в один ампер.
Открытый коллектор Выходной сигнал, обеспечиваемый транзистором, где выход с открытым коллектором действует как замыкание переключателя на землю при активации.
Open-Loop Система, которая не использует информацию обратной связи для регулирования производительности.
Phase Lock Loop (PLL) Используется для исправления ошибок, PLL относится к внешнему цифровому контроллеру, который контролирует цифровую обратную связь, пропорциональную скорости.Он сравнивает это с известным количеством отсчетов, которые должны быть видны в течение определенного периода времени, и вычисляет ошибку на основе своей обратной связи. Minarik использует Phase Lock Loop в цифровых интерфейсах, таких как DLC Series.
ПЛК. Программируемый логический контроллер (ПЛК) использует запрограммированные логические инструкции для управления банками входов и выходов, которые связывают срабатывание переключателя по времени с внешними электромеханическими устройствами.
Заглушка Метод обеспечения быстрой остановки или реверса двигателя путем подачи частичного или полного обратного напряжения на клеммы двигателя во время работы.Не рекомендуется для систем постоянного тока, так как срок службы двигателя и привода сокращается, что может привести к необратимому повреждению.
Пропорционально-интегрально-производная Действие по распознаванию ошибки скорости или положения в системе и применение коррекции (или изменения напряжения) к системному усилителю, тем самым изменяя скорость двигателей или изменяя положение. PID относится к группе параметров усиления, которые настраивают или оптимизируют реакцию системы с обратной связью.
Poles Магнитные полюса в электродвигателе, которые возникают в результате соединения и размещения обмоток в двигателе.Помимо полюсов, создаваемых электричеством, постоянные магниты, установленные в определенных областях, представляют собой полюсы с постоянной ориентацией.
Потенциометр (Pot) Пассивное устройство (переменный резистор), используемое для изменения напряжения между минимальным и максимальным уровнем. Стандартный горшок скорости — 300 или однооборотный. Операторы контролируют скорость двигателя с помощью потенциометра, подключенного к приводу. Кроме того, монтируемые на плате триммеры позволяют пользователям выполнять калибровку.
Номинальные значения Номинальное значение параметра (напряжение, температура и т. Д.).) — максимальное значение, которого может достичь параметр в электрическом устройстве, работающем непрерывно без чрезмерного ухудшения характеристик, потери его основных свойств или угроз безопасности.
Регенеративные Регенеративные приводы, часто используемые взаимозаменяемо с четырехквадрантными приводами, применяются для регенерации энергии от двигателя и привода обратно к источнику питания. Двигатель генерируется, когда нагрузка заставляет двигатель работать быстрее, чем задано приводом. Четырехквадрантные приводы могут предотвратить превышение скорости двигателями.Четырехквадрантный привод является рекуперативным, когда он возвращает генерируемую энергию в источник, например аккумулятор или линию переменного тока. Кроме того, энергия может сбрасываться через резистор динамического торможения или резистор сброса, как в случае нерегенеративного четырехквадрантного привода.
Реле Эти электронные компоненты управляют другими устройствами в цепи. Набор контактов, механизм переключения, размыкается или замыкается, когда магнитная катушка реле находится под напряжением. Сопротивление Противодействие току, протекающему через проводник в замкнутой цепи.
Ротор Вращающийся узел двигателя. Обычно включает вал, вентилятор и сердечник ротора.
Кремниевый управляемый выпрямитель (SCR) Также известный как тиристор, SCR представляет собой диод с дополнительным переходом, привязанным к третьей ножке, известной как затвор между катодом и анодом. SCR предотвращают протекание тока в любом направлении, пока затвор не получит сигнал напряжения. После получения этого триггерного сигнала SCR становится диодом.Он остается включенным, независимо от того, что происходит на затворе, до перехода через ноль, после чего ток перестает течь.
Серво Система, состоящая из усилителя, исполнительного механизма и элемента обратной связи. Сервоприводы, как правило, управляют одной или комбинацией следующих переменных: положением, скоростью и крутящим моментом.
Регулировка скорости Определяется как отклонение скорости двигателя от холостого хода до полной нагрузки; обычно выражается в процентах от базовой скорости.Устройства обратной связи, такие как тахометр или цифровое управление с обратной связью, обеспечивают повышенное регулирование.
Статор Стационарная часть двигателя. Двигатель постоянного тока с постоянными магнитами удерживает магниты в статоре.
Ограничители перенапряжения Эти устройства, такие как металлооксидный варистор (MOV), подавляют скачки напряжения, которые могут возникнуть в линии переменного тока.
Обратная связь тахометра Тахометр (тахометр) вырабатывает напряжение, пропорциональное скорости.Тахометры представляют собой замкнутую систему с отличным регулированием скорости.
Крутящий момент Вращающая сила, равная эквивалентной линейной силе, приложенной под прямым углом к радиусу r.
Отношение крутящего момента к инерции Номинальный крутящий момент двигателя, деленный на инерцию его ротора. Помогает определить способность двигателей разгонять нагрузки.
Трансформатор Пассивное устройство, повышающее или понижающее напряжение переменного тока за счет индукции.
TTL (транзисторно-транзисторная логика) Популярное семейство интегральных схем, работающих от напряжения логического уровня от 5 до 12 В постоянного тока.
Напряжение Напряжение — это электрическое давление. Вольт — это единица электродвижущей силы, которая вызывает протекание тока 1 А через резистор сопротивлением 1 Ом.
Вт Мощность, необходимая для поддержания силы тока в один ампер при давлении в один вольт, когда два компонента находятся в фазе друг с другом. Единица лошадиных сил равна 746 Вт.
Самопомощь: как проверить правильность работы роторных электрических вибраторов
Противовращение и синхронизацияМы производим полную линейку вибрационного оборудования.Линия продукции включает в себя различные конфигурации вибростолов, включая плоские, низкопрофильные, решетчатые и ленточные вибростолы, а также электромеханические питатели (EMF) и электромеханические грохоты (EMS). Многие из этих устройств относятся к типу «грубой силы». Эта широкая категория дизайна основана на принципах противовращения и синхронизации для двух электромеханических вращающихся электрических вибраторов.
Противовращение ваших роторных электродвигателейУстановки грубой силы требуют использования двух вращающихся электродвигателей.При установке на жесткую конструкцию вибраторы «чувствуют» друг друга и пытаются работать с одинаковой скоростью. При работе в одиночку роторный электрический вибратор будет создавать вращательную или центробежную силу. Однако для создания линейной силы с помощью двух вибраторов пара должна работать вместе и вращаться в противоположных направлениях. При установке бок о бок и просмотре с торца один вибратор должен вращаться по часовой стрелке, а другой — против часовой стрелки. В обычных приложениях не важно, какой вибратор в каком направлении работает.Однако они должны бежать в разные стороны.
При правильном движении в противоположных направлениях силы, создаваемые двумя вибраторами, нейтрализуют друг друга, за исключением двух раз в цикле, когда эксцентриковые веса вибратора оба указывают в одном направлении. В линейке трехфазных роторных электродвигателей Cleveland Vibrator изменить направление вращения одного из вибраторов так же просто, как «перевернуть» две силовые опоры вибратора. Ниже вы можете увидеть диаграмму, показывающую противовращение и компенсацию силы.
Роторный электрический вибратор с подавлением силыДля полноты картины давайте обсудим конструкцию роторного электрического вибратора. В широком смысле, роторный электрический вибратор представляет собой двигатель со сквозным валом с подшипниками на каждом конце вала. За пределами подшипников два эксцентриковых груза создают «неуравновешенное» состояние при работе двигателя. Это неуравновешенное состояние вызывает вибрацию, используемую для перемещения, просеивания или уплотнения различных продуктов.Эксцентриковые грузы имеют форму «пирога» и закрепляются на валу с помощью болта. Эксцентриситет или неуравновешенное состояние двигателя может изменяться от 0 до 100% в зависимости от соотношения этих весов.
Регулировка эксцентриковых грузов роторного электродвигателяЧтобы получить доступ к эксцентриковым противовесам, снимите четыре болта, которые удерживают крышку противовесов на месте. Затем снимите крышку грузового отсека. Внешний груз , самый дальний от центра вибратора на каждом конце вибратора, можно повернуть в новое место, изменив его соотношение с внутренним грузом .Это регулирует состояние дисбаланса, тем самым увеличивая или уменьшая выходное усилие вибратора.
Никогда не меняйте расположение внутреннего груза; отрегулируйте только внешний вес. При изменении одного внешнего веса ВСЕ внешние веса на обоих вибраторах должны измениться.
На каждом конце вала двигателя вы увидите шкалу с шагом от 0 до 100 процентов. Внешний эксцентриковый груз имеет небольшую «отметку» или «точку» на лицевой стороне груза.Отметка штампа совмещена с желаемой настройкой веса на шкале. См. Фотографию слева, на которой видна эта «отметка» с циферблатом, установленным на 40%.
Пример встречного вращенияЕсли цель состоит в том, чтобы уменьшить силу, создаваемую вибростолом, заказчик может решить «повернуть гири обратно». Другими словами, измените положение всех внешних весов на 40%. Все четыре внешних груза повернуты так, что их штампы совпадают с отметкой 40% на шкале на конце вала.Дисбаланс вибратора уменьшается за счет изменения соотношения внутреннего и внешнего веса. Это также снижает силу, которую он производит на любой заданной скорости.
Для части оборудования критически важно для успеха работы и срока службы этого устройства, чтобы все внешние грузы на каждом конце обоих вибраторов были установлены в одном и том же месте. Обратитесь к руководству по эксплуатации поворотного электрического привода или позвоните нам, если у вас возникнут вопросы. Очень важно правильно выставить все веса.
Роторный синхронизатор электрического вибратораПосле того, как внешние грузы будут установлены одинаковыми и вращение будет проверено для подтверждения противовращения, установка может работать, а вибраторы проверены на синхронизацию.Синхронизация просто означает, что вибраторы работают с одинаковой скоростью в противоположных направлениях и тем самым производят линейную вибрацию. При поставке нами типичными элементами управления оборудованием являются либо магнитный пускатель, либо частотно-регулируемый привод (VFD). Они должны запускаться вместе и управляться одним пусковым устройством.
При окончательной проверке оборудования перед отправкой мы периодически проверяем синхронизацию вибраторов. Чтобы проверить синхронизацию, с каждого вибратора снимается по одному кожуху груза, обнажая два эксцентриковых груза на одном конце.После снятия крышек агрегат перезапускается и запускается. Соблюдайте осторожность при работе с вибраторами со снятыми крышками противовесов.
Во время работы устройства стробоскопический тахометр используется для «остановки» движения вращающихся грузов. Это позволяет вам убедиться, что веса вибраторов являются «зеркалом» друг друга. Чтобы «остановить» движение вибраторов, отрегулируйте частоту строба в соответствии с рабочей скоростью вибраторов. На рабочей скорости движение будет «остановлено».Теперь вы можете легко наблюдать взаимосвязь одного набора весов с другим. Вы можете увидеть этот процесс в действии на видео ниже.
На видео начальная частота строба немного отличается от частоты двигателей. Когда скорость строба приближается к скорости вибраторов, кажется, что два набора грузов замедляются до «остановки». Как видно на видео, ориентация одного набора грузов должна отражаться на другом вибраторе. Когда кажется, что гири «останавливаются» и ориентация соблюдается, положение гирь должно быть зеркальной копией друг друга.Если это не так, тогда вибраторы не синхронны и не будут производить линейное движение. Это не желаемое условие для успешной работы вибрационного оборудования, использующего конструкцию грубой силы.
Что это значит, если вибраторы не работают вместе в синхронном режиме?Это может указывать на проблему с одним из вибраторов, возможно, на раннее указание на предстоящий отказ подшипника или отсутствие смазки на вибраторах с пресс-масленками.Пожалуйста, обратитесь к руководству по эксплуатации за рекомендуемым графиком технического обслуживания для нанесения смазки, как с количеством, так и с типом смазки. Некоторые из более мелких вибраторов имеют постоянную смазку и не требуют обслуживания такого типа. Другой вариант — перепроверить затяжку болтов крепления вибратора. Как указано в руководстве по техническому обслуживанию, крепежные болты вибратора следует периодически проверять на затяжку. Ослабленные болты могут помешать правильной работе и синхронизации двух вибраторов.
Если у вас есть какие-либо вопросы, наша дружная и знающая команда по продажам и обслуживанию всегда готова помочь. Свяжитесь с нами сегодня!
Ориентация и расположение солнечной панели
Ориентация и расположение фотоэлектрической панели солнечных батарей
Фотоэлектрическая солнечная энергия предлагает множество преимуществ при производстве электроэнергии. У него нулевые затраты на сырое топливо, неограниченные поставки и отсутствуют экологические проблемы, такие как транспортировка, хранение или загрязнение. Солнечная энергия доступна везде, даже на Луне.
Но чтобы получить максимальную отдачу от солнечной фотоэлектрической системы, солнечная панель ориентирует или «ориентирует» панель или массив непосредственно на лучистую энергию солнца, потому что, как мы знаем, чем больше площадь поверхности подвергается воздействию прямых солнечных лучей, тем больше выходной сигнал фотоэлектрическая панель будет производить, но здесь кроется проблема.
Хотя фотоэлектрическая солнечная панель может быть идеально выровнена для приема солнечной энергии, это неподвижный объект, прикрепленный либо к крыше, либо непосредственно к раме.Что касается солнечной панели, солнце, однако, не находится в стационарном положении и постоянно меняет свое положение в небе относительно земли с утра до ночи, что затрудняет правильную ориентацию солнечной панели.
Таким образом, задача получения максимальной выгоды от сбора солнечной энергии состоит в том, чтобы обеспечить правильную ориентацию и расположение фотоэлектрической солнечной панели или полной фотоэлектрической батареи с учетом прямого солнечного света, исходящего от солнца в любое время дня.Помимо «ориентации солнечной панели», также важны количество часов солнечного света в день, которые она получает, а также интенсивность или яркость солнечного света.
Например, когда солнце находится ниже в небе в зимние месяцы, ориентация солнечных панелей должна быть более вертикальной, поскольку солнечное излучение проходит через большую часть атмосферы, чтобы достичь солнечной панели, и, следовательно, его интенсивность уменьшается из-за рассеяния и поглощения. эффект атмосферы и облаков.В летние месяцы, когда солнце находится выше в небе, солнечное излучение более прямое и, следовательно, более сильное, поскольку оно имеет меньшее расстояние, чтобы пройти через атмосферу Земли, поэтому ориентация солнечных панелей более горизонтальна.
Азимут и зенитная ориентация солнечной панели
Солнечные фотоэлектрические модули и панели работают лучше всего, когда их поглощающая поверхность перпендикулярна падающим солнечным лучам. Положение солнца на небе может быть нанесено на график с использованием двух углов: азимут и зенит , и угол ориентации солнечной панели зависит от этих двух значений.
Ориентация солнечной панели — Азимутальная ориентация
Азимут — это угол компаса, под которым солнце движется по небу с востока на запад в течение дня. Обычно азимут рассчитывается как угол от истинного юга.
В солнечный полдень, который определяется как азимутальный угол в ноль градусов, поэтому Азимут = 0 o , солнце будет прямо на юг в северном полушарии и прямо на север в южном полушарии.
Солнечные азимутальные углы к востоку от прямого юга имеют отрицательный характер, при этом азимутальный угол на востоке составляет -90 o .Солнечные азимутальные углы к западу от юга имеют положительный характер, при этом азимутальный угол на западе составляет +90 o . Однако в целом азимутальный угол, необходимый для правильной ориентации солнечной панели, зависит от широты и времени года.
Ориентация солнечной панели — Ориентация зенита
Зенит — это угол, под которым солнце смотрит вверх с уровня земли или горизонта. Зенитный угол Солнца изменяется в течение дня в виде дуги, при этом Солнце достигает максимальной высоты (также называемой солнечной высотой) около полудня.Высота солнца определяется как 0 o на восходе и закате и 90 o в полдень, когда солнце находится прямо над головой.
Однако высота солнца в полдень различается между летним и зимним солнцестоянием, представляющими самые длинные и самые короткие дни в году, поскольку путь солнца образует дугу по небу, представляющую весну или осень.
Высота и азимут Солнца за период полного года могут быть нанесены на солнечную карту.Солнечная карта позволяет вам определять положение солнца в любое время дня, в течение любого месяца и для любого места, что значительно упрощает ориентацию солнечной панели. Готовые солнечные карты или диаграммы движения солнца можно приобрести, загрузить из Интернета или построить с помощью миллиметровой бумаги для любого места на поверхности земли, используя тот же принцип, что и солнечный циферблат в саду.
На солнечной карте зенитная шкала обычно представлена как серия концентрических кругов, расходящихся вертикально слева направо, а азимутальная шкала устанавливается по периметру карты.Азимутальный угол считывается путем установки прямой кромки от центра диаграммы до пересечения требуемых линий траектории часа и даты и отметки того места, где она срезает периметр диаграммы. Для разных мест требуются разные диаграммы.
В Северной Европе, на широте около 50 o северной широты, (Лондон) путь солнца в день летнего солнцестояния составляет 262 o ширины, а максимальная высота солнечного зенита составляет 62 o . В день зимнего солнцестояния путь солнца составляет всего 104 o в ширину с максимальным зенитом Солнца, уменьшающимся примерно до 15 o .Точно так же в Южной Европе, на широте 40 o северной широты (Испания), путь солнца в день летнего солнцестояния составляет 245 o ширины, а максимальный зенит Солнца составляет 72 o . В день зимнего солнцестояния путь солнц имеет ширину 120 o , а максимальный зенит Солнца равен 25 o . (Данные любезно предоставлены: Timeanddate.com).
Ориентация и наклон солнечной панели
Итак, мы можем видеть, что солнце не только движется по небу (азимут Солнца), но и движется вверх и вниз (солнечный зенит) в течение года, что затрудняет обеспечение фиксированной ориентации солнечной панели. .Затем для максимального преобразования солнечного света в солнечное электричество солнечные панели необходимо установить под углом, чтобы они указывали прямо на солнце.
В зависимости от того, как установлена панель, ее можно держать под постоянным углом или регулировать в течение года, чтобы в полной мере использовать солнечную энергию солнца. Регулировка статической фотоэлектрической солнечной системы может привести к увеличению выходной мощности на 10-40% в год, что значительно повлияет на время зарядки аккумуляторов.
Ориентация солнечной панели
Ориентация солнечной панели относится к нашей настройке азимута .Большая часть энергии, исходящей от Солнца, поступает по прямой линии. Солнечная панель или солнечная батарея будут поглощать больше энергии, если они обращены прямо к солнцу, перпендикулярно прямой линии между положением установки панелей и солнцем.
Затем нам нужно повернуть солнечную панель к земному экватору (либо на юг в северном полушарии, либо на север в южном полушарии), чтобы в течение дня ее ориентация позволяла панели улавливать максимально возможное количество солнечной радиации. возможный.
Существуют разные способы достижения требуемой ориентации солнечной панели. Мы могли бы просто направить фотоэлектрическую панель или массив на юг или север с помощью компаса, найти центральный угол между настройками летнего и зимнего азимута или более точно расположить панели относительно центрального солнечного полудня.
Солнечный полдень относится к самому высокому положению солнца в небе, когда оно проходит по дуге с востока на запад. Солнечный полдень отличается от 12:00 или полудня в качестве меры времени.Обычно солнечный полдень приходится на период с 12:00 до 14:00, в зависимости от местоположения.
При размещении и выравнивании солнечной панели или массива очень важно, чтобы никакая часть солнечной панели или солнечной батареи никогда не закрывалась от солнца, поскольку нам необходимо 100% солнечного излучения через панель. Убедитесь, что элементы, окружающие панель или массив (деревья, здания, стены, другие панели и т. Д.), Не будут отбрасывать тень на панели в любое время дня и года.
Наклон солнечной панели
Наклон солнечной панели относится к нашему зениту или настройке высоты. Как только наилучшее азимутальное положение найдено, следующим параметром, который является ключевым для выработки наибольшего количества солнечной электроэнергии, является высота фотоэлектрической панели. Из приведенного выше примера данных для Лондона мы видели, что максимальная высота, которую солнце достигает каждый день, варьируется, при этом максимальный угол наклона солнца в день летнего солнцестояния составляет около 62 o , а минимальный угол для зимнего солнцестояния. около 15 o .
Для стационарной солнечной установки предпочтительно, чтобы фотоэлектрические панели были установлены с централизованным углом наклона, представляющим весеннее равноденствие или осеннее равноденствие, и в нашем примере данных выше это будет около 38 градусов (38 o ) .
Однако эта наклонная ориентация не так критична в отношении ориентации солнечных панелей, поскольку даже при угле наклона почти 45 градусов (45 o ) по отношению к солнцу солнечные лучи все равно будут получать более 75 процентов от энергия на единицу площади поверхности, когда она оптимально выровнена.
Тогда смещение до 15 o , положительное или отрицательное, очень мало влияет на выход фотоэлектрических панелей. В идеале солнечные панели должны быть расположены там, где они будут получать как можно больше солнечного света, усредненного в течение дня и в течение года.
Ориентация и наклон солнечной панели фиксированной солнечной панели или массива также могут быть оптимизированы для определенного месяца или сезона в течение года. Например, солнечная энергетическая система может быть спроектирована для выработки максимальной выходной мощности только в зимние месяцы, чтобы снизить пиковые затраты на электроэнергию, поэтому система должна быть установлена так, чтобы оптимальная ориентация и наклон солнечной панели происходили для максимальной выходной мощности зимой. .
Одна из самых популярных стационарных солнечных энергетических систем включает установку фотоэлектрической панели или набора фотоэлектрических панелей непосредственно на круто скатную крышу, обращенную строго на юг (или север), что позволяет очень мало регулировать ориентацию солнечных панелей. и наклон, хотя большинство монтажных кронштейнов и опорных рам допускают небольшие регулировки. Максимальное увеличение выходной мощности домашней солнечной энергосистемы желательно как для повышения эффективности солнечных панелей, так и для сокращения срока окупаемости.
Но для того, чтобы максимизировать выходную мощность солнечных панелей, нам нужно, чтобы панели были идеально выровнены по солнцу. Таким образом, требуется средство отслеживания солнца по небу, и фотоэлектрическая панель или фотоэлектрическая матрица с возможностью отслеживания будут ежегодно производить на 25-30% больше энергии, чем установленная на крыше в фиксированном положении. Кроме того, слежение за солнечным светом может уменьшить количество требуемых фотоэлектрических панелей за счет повышения эффективности преобразования.
Solar Tracker
Solar Tracker
Отслеживание положения солнца с целью воздействия на солнечную панель максимального излучения в любой момент времени является основной целью фотоэлектрической системы слежения за солнечными батареями, обеспечивающей наилучшую ориентацию солнечной панели в любое время. день.
Система слежения за солнцем может отслеживать движение солнца по небу от восхода до заката, создавая оптимальную выходную мощность в течение более длительного периода, а также может учитывать сезонные изменения направления солнца.
Идеальной системой слежения за солнечным светом для солнечной панели была бы экваториальная монтировка с приводом от двигателя, аналогичная тем, которые используются в сложных телескопах или спутниковых антеннах. Это позволило бы фотоэлектрической панели следовать по траектории вращения солнца в течение всего дня, каждый день в году, обеспечивая наилучшую ориентацию солнечной панели и генерируя максимально возможную выходную мощность.
Однако такие большие моторизованные системы слежения непрактичны для большинства людей, и их стоимость будет непомерно высокой для больших панелей или многопанельных массивов. Кроме того, солнечные трекеры нельзя использовать на крыше, так как они должны быть установлены на земле и иметь достаточно места вокруг панели, чтобы она могла вращаться. Следующая лучшая вещь — это крепление с одним подшипником, которое позволяет вручную ориентировать и наклонять панель в течение дня, если это необходимо.
Имеющиеся в продаже солнечные трекеры включают одноосевое отслеживание, которое отслеживает солнце по небу в течение каждого дня с фиксированным постоянным углом наклона.Это увеличивает получаемое солнечное излучение на 25-30% по сравнению с отсутствием слежения.
Двойное или двухосевое отслеживание, отслеживает солнце по небу в течение дня, но также регулирует угол наклона массива больше зимой и меньше летом, чтобы точно определить положение солнца на небе. Двухосное слежение увеличивает получаемое солнечное излучение на 33-38% по сравнению с отсутствием слежения. Более солнечные места больше выигрывают от двухосного отслеживания.
Фотоэлектрические солнечные панели могут использоваться в качестве отдельных панелей на крыше или стенах зданий, направленных прямо на юг или на север, в зависимости от их расположения.