Регулятор оборотов двигателя сверлильного станка
Предлагается рассмотреть вариант изготовления электронного регулятора оборотов для двигателя постоянного тока с рабочим напряжением 24 V.
Предлагаемая конструкция регулятора оборотов двигателя, предназначена для изменения скорости вращения инструмента на сверлильном станке, изготовление которого описано в заметке «Сверлильный станок – ромбоид». Однако это устройство возможно использовать для регулирования мощности и в других конструкциях.
Необходимость в регулировке оборотов инструмента вызвана следующими причинами. Изменение обрабатываемого материала, диаметра и вида инструмента требует изменения скорости резания. Например, сверление оргстекла или некоторых термопластичных пластмасс, на режимах оптимальных для сверления металла, приведет лишь к расплавлению обрабатываемого материала в зоне резания и налипанию его на сверло. Сверление, развертывание и зенковка одного и того же отверстия, также требует разных оборотов для качественной обработки поверхности.
Изготовление регулятора оборотов двигателя.
1. Исходные данные.
В рассматриваемом примере, на сверлильном станке используется электродвигатель постоянного тока на 24 Вольта (0,7А).
Для работы этого электродвигателя нужен соответствующий источник питания.
Необходимое для работы двигателя напряжение и ток может обеспечить трансформатор кадровой развертки ТВК-110Л-1, взятый из старого телевизора. Он имеет небольшие габариты и массу (ШЛ 20 х 32) и с вторичной обмотки способен выдать ток 1 A с напряжением 22…24 V. При этом выпрямленное напряжение будет около 30 V, но с ростом потребляемого тока выходное напряжение будет несколько снижаться.
2. Изготовление выпрямителя.
Так как при возможном резком торможении обрабатывающего инструмента, вероятны скачки потребляемого двигателем тока до 1,5…2,0 А, для изготовляемого выпрямителя необходимо использовать диоды с запасом по предельному току.
 Желательно применить диоды с рабочим напряжением более 30V и предельным током более 2,0А.
Желательно применить диоды с рабочим напряжением более 30V и предельным током более 2,0А.В рассматриваемом варианте регулятора использованы, оптимальные из имеющихся под рукой, диоды КД202Д (200V — 5,0А).
Из выбранных диодов соберем мостовой выпрямитель и подключим его к вторичной обмотке трансформатора. Запитаем трансформатор от сети и проверим выходное напряжение.
3. Изготовление корпуса для устройства.
Пришло время для размещения электрической части регулятора оборотов. Возможны следующие варианты исполнения. В отдельном независимом от станка корпусе, в установленном постоянно на станке корпусе, а также встроенном в конструкцию станка (например, в столе станка).
 Как вариант, в рассматриваемой конструкции использован пластмассовый флакон от химикатов с габаритными размерами 90 х 70 х 90 мм.
Как вариант, в рассматриваемой конструкции использован пластмассовый флакон от химикатов с габаритными размерами 90 х 70 х 90 мм.У емкости частично срезана верхняя часть. Образовавшееся окно закрывается декоративной панелью изготовленной из металлического листа толщиной 0,4 мм. Ребра, образованные после гибки с трех сторон полочек на заготовке, придают панели достаточную для работы жесткость. При установке в конструкцию, панель также дает корпусу дополнительную прочность. На панели устанавливается розетка для выходного напряжения, регулятор мощности, плата с электронной схемой (снизу).
4. Электрическая схема регулятора.
В интернете можно найти много вариантов схем для регулирования оборотов двигателя постоянного тока. Наиболее простые и стабильные в работе схемы выполнены на основе таймера NE555. Они требуют минимум компонентов, практически не нуждаются в настройке и быстро собираются.
 Поэтому не будем стремиться к оригинальности, выполним электронный регулятор оборотов на базе отработанной схемы генератора с таймером NE555, по рисунку приведенному ниже.
Поэтому не будем стремиться к оригинальности, выполним электронный регулятор оборотов на базе отработанной схемы генератора с таймером NE555, по рисунку приведенному ниже.Схема регулятора выполнена на базе DA1 — импортном интегральном таймере NE555 (отечественный аналог — КР1006ВИ1). Конструкция таймера представляет собой многофункциональную интегральную микросхему (ИМС). Она часто применяется в различных устройствах (электроника, вычислительная техника, автоматика). Основным назначением этого таймера, является генерирование импульсов с большим диапазоном периода повторения (от микросекунд до нескольких часов).
В этом методе, напряжение питания на двигатель подается в виде импульсов с постоянной частотой следования, но при этом их длительностью (шириной импульса) можно управлять. При этом способе регулирования, передаваемая мощность и скорость вращения двигателя будут пропорциональны длительности импульсов (коэффициенту заполнения ШИМ сигнала — отношению длительности импульса к его периоду).
Принцип работы генератора ШИМ сигнала на таймере NE555 многократно и подробно описан в соответствующих публикациях, с чем можно ознакомиться в интернете.
Генератор регулятора работает на частоте около 500 Гц. Его частота зависит от емкости конденсатора С1. Длительность импульса будем регулировать переменным резистором R2. Сигналы с выхода генератора ШИМ сигнала, через усилитель тока на транзисторе VT1 управляют электродвигателем станка. Увеличивая ширину положительного импульса поступающего на базу транзистора VT1, мы увеличиваем мощность поступающую на двигатель постоянного тока, и наоборот. Длительность импульсов, следовательно и частоту вращения двигателя можно изменять в пределах от 0 до 95…98%.
Реверс направления вращения инструмента можно выполнить с помощью тумблера установленного на панели. Но для упрощения конструкции, эта функция выполняется поворотом вилки (сменой полюсов) в розетке на панели.
Вместо составного n-p-n транзистора КТ 829А можно применить полевой транзистор или оптрон соответствующей мощности.
Регулятор будет питаться от сети 220 В и иметь регулируемый по мощности выход на 24 В. Напряжение питания таймера NE555 должно быть в диапазоне 5…16 В, в схеме он будет работать от стабилизированного напряжения 12В. Данная схема регулятора может работать и от другого источника питания в пределах 24…30 В.
5. Комплектация устройства.
Комплектуем устройство деталями согласно приведенной схеме. Выходной транзистор VT1 и стабилизатор VR1 устанавливаем на небольшие радиаторы. В приведенной конструкции они изготовлены из алюминиевого уголка.
6. Проверка работы схемы генератора.
В интернете размещено много похожих вариантов схемы генератора на таймере NE555, но номиналы деталей в разных схемах отличаются в десятки и сотни раз. Поэтому, для упрощения изготовления и отладки работающей схемы, желательно предварительно собрать ее на универсальной монтажной плате. Собираем схему генератора. К выходу таймера (выв.3) подключаем базу n-p-n транзистора КТ315.
 В цепь его коллектора включаем индикаторный светодиод через ограничительный резистор 1кОм. Эмиттер подключаем на минус схемы. Запитываем схему генератора от стабилизированного источника питания 12В. Подбирая номиналы деталей, контролируем правильность работы генератора по свечению светодиода.
В цепь его коллектора включаем индикаторный светодиод через ограничительный резистор 1кОм. Эмиттер подключаем на минус схемы. Запитываем схему генератора от стабилизированного источника питания 12В. Подбирая номиналы деталей, контролируем правильность работы генератора по свечению светодиода.Контрольный светодиод можно установить и непосредственно к выходу таймера (выв.3), но следует учитывать, что таймер NE555 имеет выходной ток до 200 мА. Близкий отечественный аналог КР1006ВИ1 допускает выходной ток до 100 мА.
7. Монтаж схемы регулятора оборотов.
Выполняем компоновку платы — размещаем детали на радиаторах, переменный резистор управления оборотами, электролитические конденсаторы. Сверлим отверстия в плате под крепеж деталей и крепление платы к панели устройства. Выполняем монтаж схемы регулятора на рабочую плату.
8. Сборка регулятора оборотов двигателя.
Собираем все узлы регулятора оборотов. Закрепляем плату на панели устройства, используя прокладку из тонкого текстолита для изоляции контактов платы от металлической панели.
 Выход регулятора присоединяем к розетке расположенной на панели. Также к ее клеммам, в обратном направлении, припаиваем диод VD3. Он будет гасить импульсы самоиндукции обмотки электродвигателя. Этот диод должен выдерживать рабочее напряжение и ток, не менее двух раз превышающие рабочие характеристики двигателя.
Выход регулятора присоединяем к розетке расположенной на панели. Также к ее клеммам, в обратном направлении, припаиваем диод VD3. Он будет гасить импульсы самоиндукции обмотки электродвигателя. Этот диод должен выдерживать рабочее напряжение и ток, не менее двух раз превышающие рабочие характеристики двигателя.Роль индикатора работы регулятора будет выполнять один элемент светодиодной ленты LED1, на напряжение 12В. Разместим (приклеим) его на плечо подвески двигателя, над сверлильным патроном, для одновременной с индикацией подсветки зоны обработки.
9. Доработка конструкции сверлильного станка.
Работа на изготовленном станке показала необходимость в некоторых доработках его конструкции.
Под винт фиксации по высоте установлена дополнительная пластина, позволяющая распределить давление зажима на большую площадь, исключить заклинивания и облегчить скольжение основания подвески по стойке станка.
По предложению комментатора о контроле оптимального положения инструмента относительно обрабатываемой детали, изготовлен и установлен регулируемый упор. Он устанавливается наверху основания подвески и служит упором для верхнего рычага подвески. Упор настраивается так, чтобы сверлильный патрон и рычаги подвески не могли опуститься ниже 2-х мм от нулевой линии. В положении на упоре, сверло устанавливается в патроне, до касания столика станка. Так оно автоматически будет работать в оптимальной зоне 4мм, с минимальным боковым смещением 0,01мм.
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
коллекторный и асинхронный двигатели и варианты регулировки
Практически во всех бытовых приборах и электроинструментах используется коллекторныйдвигатель. В более новых моделях болгарок, шуруповертов, ручных фрезеров, пылесосов, миксеров и других присутствует регулировка оборотов двигателя, но в более поздних моделях такой функции нет. Такими инструментами и бытовыми приборами не всегда удобно работать, и поэтому существуют регуляторы оборотов с поддержанием мощности.
Виды двигателей и принцип работы
Двигатели делятся на три типа: коллекторный, асинхронный и бесколлекторный. В большинстве электроинструментов стоит первый тип. Этот электродвигатель имеет довольно компактный размер. Его мощность значительно выше, чем у асинхронного, а цена довольно низкая. Что касается асинхронных, то этот тип в основном используется в металлообрабатывающей отрасли, а также широкое распространение они получили в угледобывающих шахтах. Довольно редко их можно встретить в быту.
Бесколлекторный электродвигатель используется там, где нужны большие обороты, точное позиционирование и малые размеры. Например, в различной медицинской технике, авиамоделировании. Принцип работы довольно прост. Если рамку прямоугольной формы, которая имеет ось вращения, поместить между плюсами постоянного магнита, то она начнет вращаться. Направление зависит от направления тока в рамке. В составе этого типа присутствуют якорь и статор. Якорь вращается, а статор стоит неподвижно. Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Как правило, на якоре стоит не одна рамка, а 4,5 или более.
Асинхронный двигатель работает по другому принципу. Благодаря эффекту переменного магнитного поля в статорных катушках он приводится во вращение. Если углубиться в курс физики, то можно вспомнить, что вокруг проводника, через который проходит ток, создается своеобразное магнитное поле, заставляющее вращаться ротор.
Принцип работы бесколлекторного типа основан на включении обмоток так, чтобы магнитные поля статора и ротора были ортогональны друг другу, а вращающий момент регулируется специальным драйвером.
На рисунке отчетливо видно, что для перемещения ротора нужно выполнить необходимую коммутацию, но и регулировать обороты не представляется возможным. Тем не менее бесколлекторный двигатель может очень быстро набирать обороты.
Устройство коллекторного двигателя
Коллекторный электродвигатель состоит из статора и ротора. Ротором называется часть, которая
Ротором называется часть, которая
вращается, а статор является неподвижным. Еще одной составляющей электродвигателя являются графитовые щетки, по которым ток течет к якорю. В зависимости от комплектации могут присутствовать датчики Холла, которые дают возможность плавного запуска и регулировки оборотов. Чем выше подаваемое напряжение, тем выше обороты. Этот тип может работать как от переменного, так и от постоянного тока.
По классификации коллекторные двигатели можно разделить на те, что работают от переменного и от постоянного тока. Их также можно разделить по типу возбуждения обмотки: двигатели с параллельным, последовательным и смешанным (параллельно-последовательным) возбуждением.
Типы регулировки
Существует довольно много вариантов регулировки оборотов. Вот основные из них:
- Блок питания с регулировкой выходного напряжения.
- Заводские устройства регулировки, которые идут изначально с электромотором.
- Регуляторы на кнопочном управлении и стандартные регуляторы, которые просто ограничивают напряжение.

Эти типы регулировки плохи тем, что с уменьшением или увеличением напряжения падает и мощность. В некоторых электроинструментах это допустимо, но, как показывает практика, в большинстве случаев это является неприемлемым из-за сильного падения мощности и, соответственно, КПД.
Наиболее приемлемым вариантом будет регулятор на основе симистора или тиристора. Мало того что такой регулятор не уменьшает мощность при уменьшении напряжения, он еще и позволяет осуществлять более плавный пуск и регулировку оборотов. К тому же такую схему можно сделать своими руками. Ниже изображен регулятор оборотов с поддержанием мощности. Схема собрана на базе симистора BTA 41 800 В.
Все номиналы электроэлементов обозначены на схеме. Это схема после сборки, работает довольно стабильно и обеспечивает плавную регулировку коллекторного двигателя. При уменьшении выходного напряжения мощность не уменьшается, что является весомым плюсом.
При желании можно собрать регулятор оборотов коллекторного двигателя 220 В своими руками. Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
Эта схема собрана на базе симистора ВТА26−600, который предварительно необходимо установить на радиатор, так как при нагрузке этот элемент довольно сильно греется.
К готовой схеме возможно подключить электромотор, мощность которого не превышает 4 кВт.
Схема выглядит следующим образом.
Она успешно справится с регулировкой таких электроинструментов, как дрель, болгарка, циркулярка, лобзик. При желании можно использовать схему в качестве регулятора мощности ТЭН-ов, обогревателей и в качестве диммера. К минусам можно отнести невозможность регулировки мощности приборов, которые питаются от постоянного тока.
Регуляторы мощности постоянного тока
Иногда возникает потребность в регулировке оборотов коллекторного двигателя постоянного тока.
Если потребитель не имеет большой мощности, то возможно последовательно подсоединить переменный резистор, но тогда КПД такого регулятора резко упадет. Существуют схемы, при помощи которых возможно довольно плавно регулировать обороты, не уменьшая КПД. Такой регулятор подойдет для изменения яркости различных ламп, напряжения питания, не превышающего 12 В. Эта схема также выполняет роль стабилизатора частоты вращения, при изменении механической нагрузки на вал обороты остаются неизменными.
Существуют схемы, при помощи которых возможно довольно плавно регулировать обороты, не уменьшая КПД. Такой регулятор подойдет для изменения яркости различных ламп, напряжения питания, не превышающего 12 В. Эта схема также выполняет роль стабилизатора частоты вращения, при изменении механической нагрузки на вал обороты остаются неизменными.
Эта схема регулятора оборотов двигателя постоянного тока 12 В вполне подойдет для регулировки и стабилизации оборотов двигателей с током, не превышающим 5 А. В эту схему входит драйвер на биполярных транзисторах и таймер 7555, что обеспечивает стабильную работу и плавную скорость регулировки. Цена на детали довольно низкая, а это является несомненным плюсом. Можно также собрать регулятор оборотов электродвигателя 12 В своими руками.
Асинхронный двигатель и регулятор оборотов
Как правило, этот тип применяется на различных производствах, начиная от шахт и заканчивая металлообрабатывающими отраслями. Например, в угольных шахтах для плавного пуска конвейерных лент используется пускатель АПМ, в который встроено устройство на тиристорах, позволяющее плавно запустить конвейер. Асинхронный однофазный двигатель применяется также в автомобилях, вентиляторах печек, двигателях, которые приводят в движение дворники, бытовых вентиляторах, питающихся от напряжения 220 В. В машине двигатели работают от постоянного напряжения 12 вольт, но плавный запуск в них не предусмотрен.
Например, в угольных шахтах для плавного пуска конвейерных лент используется пускатель АПМ, в который встроено устройство на тиристорах, позволяющее плавно запустить конвейер. Асинхронный однофазный двигатель применяется также в автомобилях, вентиляторах печек, двигателях, которые приводят в движение дворники, бытовых вентиляторах, питающихся от напряжения 220 В. В машине двигатели работают от постоянного напряжения 12 вольт, но плавный запуск в них не предусмотрен.
Для регулировки оборотов асинхронного двигателя применяются так называемые частотные преобразователи. Эти преобразователи позволяют кардинально менять форму и частоту сигнала. Как правило, такие преобразователи собраны на базе мощных полупроводниковых транзисторов и импульсных модуляторов, а всеми элементами управляет ШИМ-контроллер.
Следует помнить: чем плавней разгон двигателя, тем меньше он испытывает перегрузок. Это касается редукторов, конвейеров, мощных насосов, лифтов. Вот одна схема регулятора оборотов асинхронного двигателя 220 В.
С помощью этой схемы можно регулировать обороты двигателей, мощность которых не превышает 1 тыс. Вт. При сборке этой схемы есть нюансы, которые необходимо учесть:
- Тип соединения «треугольник».
- Необходим драйвер трехфазного моста IR2133.
- Микроконтроллер AT90SPWM3B.
- Для прошивки микроконтроллера необходим программатор.
- Мощные транзисторы IRG4BC30W или их аналоги.
- ЖК-дисплей в качестве индикатора.
- Импульсный блок питания, который можно купить или собрать собственноручно.
Из-за значительного нагрева диодный мост и силовые транзисторы необходимо установить на радиатор. Если предполагается подключение двигателя мощностью до 400 Вт, то термодатчик ставить необязательно, а для управления можно использовать опторазвязку.
Чтобы увеличить срок службы различных видов двигателей, рекомендуется пользоваться регуляторами оборотов, решающими большое количество проблем.
изменение скорости вращения и схемы на тиристорах
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно – модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору.
Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью – для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность.
Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f – частота тока питающей сети, p – число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот.
 Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая. - Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 – Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 – Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 – Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 – ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа ” tda1085 ” зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 – Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи “R2–>P1–>C2”. При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 – Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.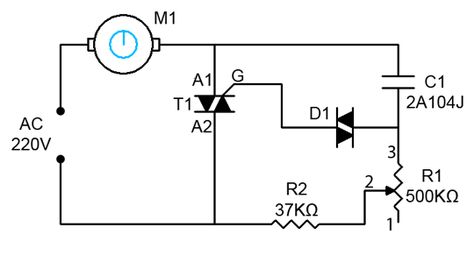
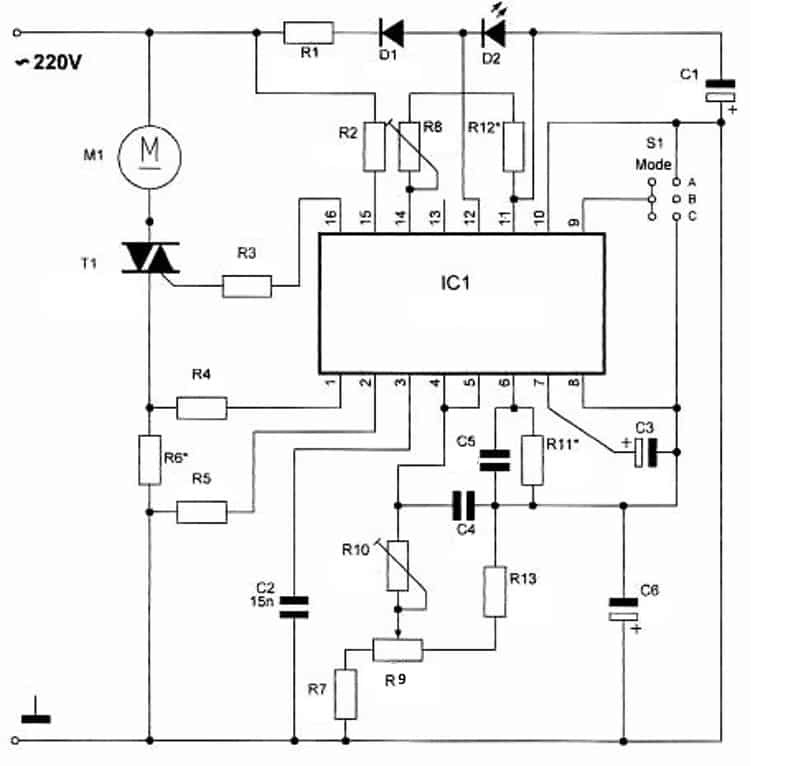
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Регулировка оборотов асинхронного двигателя 380 схема — Moy-Instrument.Ru
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения.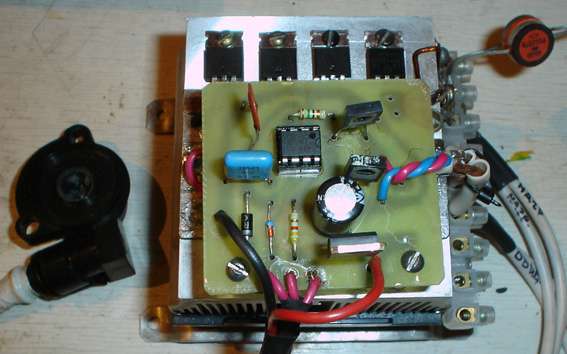 Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото — регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.

Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото — шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.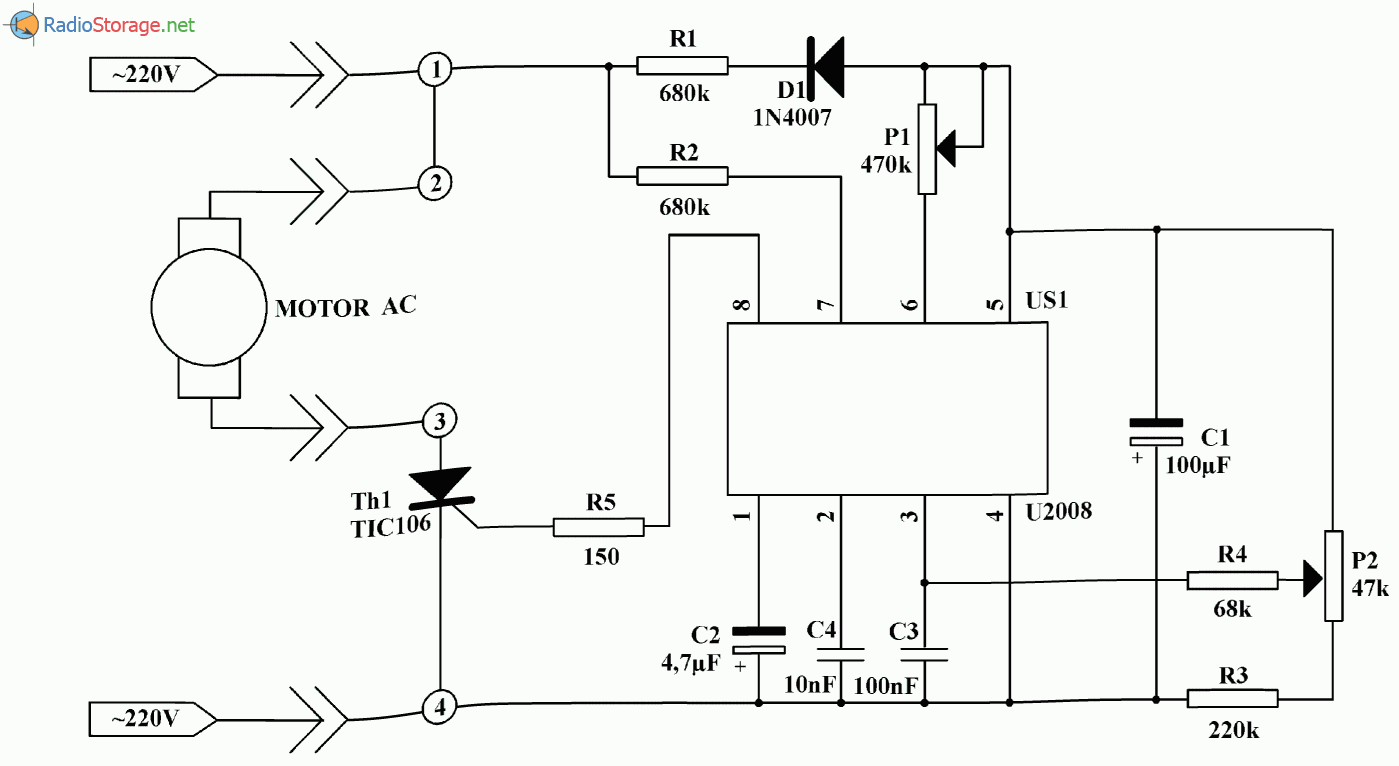
Фото — схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото — синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления.
 Первые чаще применяются, но вторые считаются более надежными;
Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото — схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Самостоятельное изготовление регулятора оборотов электродвигателя
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов.
 Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
- Что такое асинхронный двигатель?
- Двигатели с короткозамкнутым ротором (АДКР)
- Двигатели с фазным ротором
- Принцип работы и число оборотов асинхронных двигателей
- Способы изменения оборотов двигателя
- Типичные схемы регуляторов оборотов
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».
Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – част
схема подключения самодельного регулятора числа оборотов. Как сделать регулировку из диммера
Использование
Существует ряд рекомендаций для правильного использования болгарки с электронным блоком. При запуске инструмента дайте ему разогнаться до установленных оборотов, не спешите резать что-либо. После выключения повторно запускайте его через несколько секунд, чтобы успели разрядиться конденсаторы в схеме, тогда повторный пуск будет плавным. Регулировать скорость можно во время работы болгарки, медленно поворачивая ручку переменного резистора.
Болгарка без регулятора оборотов хороша тем, что без серьёзных затрат вы можете сами сделать универсальный регулятор оборотов для любого электроинструмента. Электронный блок, вмонтированный в отдельную коробку, а не в корпус шлифовальной машины, можно использовать для дрели, бормашины, циркулярной пилы. Для любого инструмента с коллекторным двигателем. Конечно, удобнее, когда ручка регулятора находится на инструменте, и не нужно никуда отходить и наклоняться, чтобы её повернуть. Но тут уже вам решать. Это дело вкуса.
Если среди вашего инструментария имеется старая болгарка, не торопитесь избавляться от нее. Задействовав простенькую электросхему, инструмент можно усовершенствовать, добавив ему опцию корректировки частоты вращения. За счет обычного управляющего устройства, которое можно создать своими руками в течение нескольких часов, функции инструмента существенно расширятся. Понизив количество вращений за единицу времени, углошлифовальную машинку можно использовать как заточной и шлифовочный агрегат для разных типов материалов. Появятся дополнительные возможности для использования вспомогательных оснасток и насадок.
Зачем контролировать скорость движения диска
Если болгарка используется для раскроя и резки кафельной плитки, изделий из натурального камня, высокая скорость вращения инструмента буквально убивает электроинструмент. Кроме того, при такой обработке из материала начинают выкрашиваться мелкие частицы. Это существенно ухудшает качество и внешний вид кафельной или каменной поверхности. При наличии функции выбора требуемых оборотов обработка проходит без сучка и задоринки. А сам электрический инструмент полностью защищен от поломок.
При резке кафельной плитки и изделий из камня болгарка работает с очень высокой скоростью вращения
Также скорость вращения важна и при работе с металлическими изделиями. Например, алюминиевые либо жестяные заготовки следует разрезать на минимальных оборотах. А вот толстый и твердый металл, наоборот, обрабатывается на высоких скоростях. Полировочные и шлифовальные работы с помощью УШМ и вовсе невозможно эффективно выполнить, если пила не позволяет выбрать нужные обороты. Вы просто-напросто испортите обрабатываемую поверхность. Попробуйте отшлифовать древесину или лакокрасочное покрытие кузова автомобиля на высокой скорости вращения диска, и вы сами поймете, о чем идет речь.
Как видим, доработка угловой шлифмашинки делает аппарат в разы функциональнее. Появляется возможность работать с любыми мягкими материалами и деликатными поверхностями. А главное – болгарка становится практически вечной. Она будет функционировать не один десяток лет!
Тонкости работы
Если регулятор собран правильно и настроен, то включение инструмента будет удобно производить на малых оборотах, когда не наблюдается рывка. При работе, особенно учитывая повышенную опасность УШМ, нужно сделать так, чтобы случайное воздействие на ручку регулятора было невозможным
Особенно это важно, если регулятор встраивают в шнур, недалеко от корпуса самой болгарки
Если до этого машинка не имела регулятора, то нужно иметь в виду, что этот регулятор будет стремиться поддерживать под нагрузкой близкие к холостому ходу обороты, так что не нужно особенно разгонять болгарку под большую нагрузку. Когда сопротивление обрабатываемого материала тормозит диск, напряжение на датчике тока возрастает за счет увеличения тока, а напряжение на моторе немного падает. Микросхема реагирует на это изменением угла (момента отпирания симистора) в сторону увеличения мощности.
В случае слишком большого тока срабатывает защита и угол изменяется в сторону уменьшения мощности. Так что, возможно, придется подобрать R9 путем экспериментов, в небольших пределах изменяя расчетное сопротивление.
Принцип работы
Для сборки лучше всего выбрать тиристорный преобразователь, он позволит осуществлять изменение режима работы без существенных потерь.
К тому же, благодаря нему будут настроены такие функции как:
- Разгон-торможение.
- Жесткое регулирование характеристик.
- Переключение на реверсивное движение.
К тому же у него импульсно-фазовое управление. Которое, позволяет не терять момент вращения ротора, не увеличивая потери на реактивной характеристике.
Схема регулятора оборотов будет состоять из следующих ключевых узлов:
- Управляемый выпрямитель сигнала.
- Блок регулирования.
- Система обратной связи.
- Регулятор мощности сети.
Как подключить прибор к болгарке, варианты
Подключение регулятора зависит от того, какой вид прибора выбран. Если используется простая схема, достаточно вмонтировать её в канал сетевого питания электроинструмента.
Установка самодельной платы
Не существует готовых рецептов по монтажу. Каждый, кто решил оборудовать УШМ регулятором, располагает его сообразно своим целям и модели инструмента. Кто-то вставляет прибор в ручку держателя, кто-то в специальную дополнительную коробку на корпусе.
В различных моделях пространство внутри корпуса болгарки может быть разным. В некоторых достаточно свободного места для установки управляющего блока. В других приходится выносить его на поверхность и крепить иным способом. Но хитрость в том, что, как правило, в задней части инструмента всегда существует определённая полость. Предназначена она для циркуляции воздуха и охлаждения.
Полость в задней части аппарата
Обычно именно здесь и располагается заводской регулятор оборотов. Сделанную своими руками схему можно поместить в это пространство. Чтобы регулятор не перегорел, тиристоры следует установить на радиатор.
Особенности монтажа готового блока
При покупке и установке заводского регулятора внутрь болгарки, чаще всего приходится модифицировать корпус — прорезать в нём отверстие для вывода регулировочного колеса. Но это может неблагоприятно отразиться на жёсткости кожуха. Поэтому предпочтительной является установка прибора снаружи.
Регулировочное колесо изменяет обороты
Цифры на регулировочном колесе обозначают количество оборотов шпинделя. Значение это не абсолютное, а условное. «1» — минимальные обороты, «9» — максимальные. Остальные цифры служат для ориентировки при регулировании. Расположение колеса на корпусе бывает различным. Например, на УШМ Bosch PWS 1300–125 CE, Wortex AG 1213–1 E или Watt WWS-900, оно расположено у основания рукояти. В других моделях, таких как Makita 9565 CVL, регулировочное колесо находится в торце кожуха.
Схема подключения регулятора к болгарке не сложная, но иногда не так просто протянуть кабели к кнопке, которая располагается на другом конце корпуса прибора. Задача может решиться подбором оптимального сечения провода или выводом его на поверхность кожуха.
Регулятор подключается согласно схеме
Хороший вариант — установка регулятора на поверхности прибора или крепление к сетевому кабелю. Не всегда всё получается с первой попытки, иногда прибор приходится протестировать, после чего внести некоторые коррективы. А это легче делать, когда доступ к его элементам открыт.
Крепление к сетевому шнуру
Руководство по эксплуатации устройства
Основное правило при эксплуатации болгарки с самодельным регулятором оборотов — соблюдение режима работы и отдыха. Дело в том, что двигатель, работающий на «отрегулированном» напряжении, особенно сильно греется
При шлифовании на пониженных оборотах важно делать частые перерывы, чтобы обмотки коллектора не сгорели
Также крайне не рекомендуется включать инструмент, если регулятор оборотов выставлен на минимум — пониженного напряжения не хватит на прокрутку ротора, ламели коллектора останутся в режиме короткого замыкания, обмотки начнут перегреваться. Открутите переменный резистор на максимум, затем, включив УШМ, снизьте обороты до нужной величины.
Кроме того, следует понимать, что регулировка скорости оборотов на болгарке происходит по принципу водопроводного крана. Прибор не увеличивает количество оборотов, он может только понижать их. Из этого следует, что если максимальная паспортная скорость 3000 об/мин,то при подключении регулятора оборотов, болгарка будет работать в диапазоне ниже, чем максимальная скорость.
Видео: самодельный регулятор оборотов УШМ
Оснащение болгарки схемой регулировки оборотов двигателя, повысит эффективность использования прибора. и расширит его функциональный диапазон. Также это сэкономит технологический ресурс шлифовальной машины и увеличит срок её службы.
Типовая схема регулятора оборотов
Вот так выглядит плата регулятора оборотов в сборе
Регулятор оборотов двигателя – это не просто переменный резистор, понижающий напряжение. Необходим электронный контроль величины силы тока, иначе с падением оборотов будет пропорционально снижаться мощность, а соответственно и крутящий момент. В конце концов, наступит критически малая величина напряжения, когда при малейшем сопротивлении диска электродвигатель просто не сможет повернуть вал. Поэтому, даже самый простой регулятор необходимо рассчитать и выполнить в виде проработанной схемы.
А более продвинутые (и соответственно дорогие) модели оснащаются регуляторами на основе интегральной микросхемы.
Интегральная схема регулятора. (наиболее продвинутый вариант)
Если рассматривать электрическую схему болгарки в принципе, то она состоит из регулятора оборотов и модуля плавного пуска. Электроинструменты, оснащенные продвинутыми электронными системами, существенно дороже своих простых собратьев. Поэтому далеко не каждый домашний мастер в состоянии приобрести такую модель. А без этих электронных блоков останется лишь обмотка электромотора и клавиша включения.
Надежность современных электронных компонентов УШМ превосходит ресурс обмоток двигателя, поэтому не стоит бояться приобретения электроинструмента, оснащенного такими приспособлениями. Ограничителем может быть лишь цена изделия. Мало того, пользователи недорогих моделей без регулятора рано или поздно приходят к самостоятельной его установке. Блок можно приобрести в готовом виде или изготовить самостоятельно.
Для чего нужно регулировать обороты на УШМ
Любая болгарка конструктивно «заточена» на работу только с отрезным или зачистным кругом определенного диаметра. Всего существует шесть самых распространенных диаметров в интервале от 115 до 300 мм, которым соответствует шесть групп скоростей вращений шпинделя на холостом ходу. К примеру, болгарки с кругами Ø125 мм имеют частоту вращения порядка 11÷12 тыс. об/мин, а с кругами Ø150 мм — 9÷10 тыс. об/мин. Такие значения числа оборотов шпинделя обусловлены тем, что отрезные диски предназначены для высокопроизводительной обработки твердых материалов (металл, камень, керамика) на скоростях резания до 80 м/сек.
Однако при резке и в особенности шлифовке мягких и вязких материалов требуются совсем другие параметры резания и, соответственно, применение инструмента с регулятором скорости. Причем это касается не только древесины и пластмасс, но также сталей, сплавов титана и алюминия. Например, обработка пластиков и мягких сортов дерева происходит на скоростях резания от 8 до 12 м/сек, шлифовка сплавов титана и нержавейки — в пределах 15÷20 м/сек, и даже обычную сталь шлифуют не более чем при 30 м/сек. Поэтому скорость вращения шлифовальных насадок у болгарок должна быть меньше паспортной в несколько раз. При этом необходимо отметить, что в основной массе регуляторы оборотов УШМ по своей сути являются регуляторами мощности, подаваемой на электродвигатель болгарки. То есть снижение числа оборотов достигается уменьшением мощности источника на величину до 15 % от номинальной. Но для шлифовки и резки мягких материалов это не имеет большого значения, т. к. в этом случае изначально требуется небольшая мощность.
Регулятор оборотов и плавный пуск — для чего нужны
В современных болгарках применяют две важные функции, повышающие надёжность и безопасность инструмента:
- регулятор оборотов — прибор, предназначенный для изменения количества оборотов двигателя в различных режимах работы;
- плавный пуск — схема, обеспечивающая медленное увеличение оборотов двигателя от нуля до максимального при включении устройства.
Применяются в электромеханических инструментах, в конструкции которых используется коллекторный двигатель. Способствуют уменьшению износа механической части агрегата во время включения. Снижают нагрузку на электрические элементы механизма, запуская их в работу постепенно.
При включении питания происходит скачкообразный переход от состояния покоя до вращения диска со скоростью 2,5–10 тысяч оборотов в минуту. Тем, кто работал с болгаркой, хорошо известно ощущение, что машинка просто «вырывается из рук». Именно в этот момент и происходит подавляющее количество поломок, связанных с механической частью агрегата.
Не меньшую нагрузку испытывают и обмотки статора и ротора. Коллекторный двигатель стартует в режиме короткого замыкания, электродвижущая сила уже толкает вал вперёд, но инерция ещё не позволяет ему вращаться. Возникает скачок пускового тока в катушках электромотора. И хотя конструктивно они рассчитаны на такую работу, рано или поздно наступает момент (например, при скачке напряжения в сети), когда изоляция обмотки не выдерживает и происходит межвитковое замыкание.
При включении в электрическую схему инструмента схем плавного пуска и изменения частоты вращения двигателя, все вышеизложенные проблемы автоматически исчезают. Кроме всего прочего, решается проблема «провала» напряжения в общей сети в момент запуска ручного инструмента. А это значит, что холодильник, телевизор или компьютер не будут подвержены опасности «перегорания». А предохранительные автоматы на счётчике не будут срабатывать и отключать ток в доме или квартире.
Схема плавного пуска используется в болгарках средней и высокой ценовой категорий, блок регулировки оборотов — преимущественно в профессиональных моделях УШМ.
Дополнительные электросхемы повышают стоимость инструмента, но увеличивают срок службы и уровень безопасности при работе.
Фото регулятора оборотов своими руками
Также рекомендуем просмотреть:
- Замена масла в двигателе своими руками
- Ремонт двигателя своими руками
- Бампер своими руками
- Покраска авто своими руками
- Полировка автомобиля своими руками
- Полировка фар своими руками
- Замена порогов своими руками
- Регулировка карбюратора своими руками
- Как заменить свечи
- Багажник своими руками
- Замена лобового стекла своими руками
- Замена подшипников своими руками
- Химчистка салона своими руками
- Ремонт кузова своими руками
- Камера заднего вида своими руками
- Промывка форсунок своими руками
- Прицеп своими руками
- Замена сцепления своими руками
- Ремонт стартера своими руками
- Ремонт АКПП своими руками
- Регулировка фар своими руками
- Минитрактор своими руками
- Ремонт рулевой рейки своими руками
- Шумоизоляция автомобиля своими руками
- Тюнинг ваза своими руками
- Ремонт генератора своими руками
Регулятор оборотов шуруповерта
Электрический шуруповерт работает либо от сети 220 В, либо от аккумуляторной батареи. Его мощность зависит от величины напряжения аккумулятора. Скорость вращения шуруповерта начинается от 15 000 об/мин. Кроме того, шуруповерт, который работает от сети, имеет 2 скорости вращения: более медленную для вкручивания, более высокую для сверления. Внутри кнопки подачи питания располагается регулятор оборотов. Довольно миниатюрный размер этого узла инструмента достигается при помощи микропленочной технологии. Его основной деталью является симистор. Принцип работы регулятора следующий:
- При включении кнопки на управляющий электрод симистора подается переменный ток, имеющий синусоидальную фазу.
- Происходит открытие симистора, ток начинает проходить через нагрузку.
Время срабатывания симистора зависит от амплитуды управляющего напряжения. Чем больше амплитуда, тем раньше происходит срабатывание симистора. Величина амплитуды задается при помощи переменного резистора, соединенного с кнопкой пуска. Схема подключения кнопки отличается в разных моделях. К регулятору оборотов возможно подключение конденсатора.
Зачастую в нынешних экономических условиях не всегда покупатель может себе позволить полноценный дорогой шуруповерт от именитых фирм. В более дешевых моделях такой функции может и не быть. Но это не повод отчаиваться. Регулятор оборотов можно собрать самостоятельно, о чем мы и поговорим ниже.
Регулятор оборотов шуруповерта собирается на основе ШИМ – контроллера и ключевого многоканального полевого транзистора. Управление работой этого узла инструмента осуществляет резистор. Его положение зависит от давления на кнопку пуска шуруповерта.
Направление вращения рабочего органа меняется путем смены полюсов напряжения, которое подается на щетки двигателя. Инструментально это осуществляется при помощи перекидных контактов, приводящихся в действие рычажком реверса.
Собрать такой регулятор возможно своими руками. Как это сделать, мы рассмотрим ниже.
Схема элементов, входящих в состав регулятора оборотов, представлена на рисунке ниже.
Схема
В данном случае используется микросхема сдвоенного компаратора LM 393. Здесь первый компаратор работает как генератор пилообразного напряжения, на втором выполнена ШИМ. Сигналом управления для ШИМ служит падение напряжения на контактах двигателя. Если говорить упрощенно, то на схеме электродвигатель выглядит как активное и индуктивное сопротивления, соединенные последовательно между собой. При изменении нагрузки изменяется соотношение этих сопротивлений соответственно, регулятор же контролирует это и меняет заполнение ШИМ, тем самым стабилизируя обороты.
В качестве источника питания для ШИМ следует использовать электронный трансформатор. Он представляет собой полумостовой преобразователь напряжения из 220 в 12 В, который используется для питания галогеновых ламп освещения. Его размеры сопоставимы с размерами спичечного коробка. Цена колеблется в пределах 2–3 у. е. К нему необходимо добавить выпрямитель на выход (это четыре диода, к примеру, КД 213), а также конденсатор емкостью в несколько тысяч микрофарад на 25 вольт. Все это будет составлять импульсный источник питания с постоянным напряжением на выходе.
Отдельно стоит поговорить об изготовлении печатной платы для регулятора. Для ее изготовления необходим лист фотобумаги, лазерный принтер. Сначала необходимо напечатать рисунок на фотобумаге с помощью лазерного принтера, затем перенести его на заготовку платы с помощью нагретого утюга. Заготовка платы с прилепившейся бумагой ложится в емкость и подставляется под струю горячей воды. Это делается для того, чтобы желатиновый слой фотобумаги набух, и она отлепилась от платы. Оставшийся рисунок на плате протравливается хлорным железом.
Самостоятельное создание регулятора
Как сделать регулятор своими самостоятельно? Стремление пристроить обыкновенное электронное устройство, предназначенное для изменения электрической мощности (диммер) заканчивается ничем. В первую очередь, диммер для болгарки рассчитан на иную нагрузку. Также диммер не имеет совмещения с управлением обмоткой электрического мотора. Поэтому нужно проводить монтаж отдельной схемы. Также необходимо придумать, где она будет располагаться внутри корпуса болгарки.
Простой полупродниковой прибор (тиристорный регулятор) можно соорудить своими руками. Для данной процедуры будет необходимо 5 радиоэлементов. Радиоэлементы можно купить на радиорынке. Благодаря компактности можно спокойно провести размещение приготовленную схему в болгарке, не повредив эргономику и надежность. Однако сохранение крутящего момента не происходит при уменьшении оборотов на болгарку. Данный вариант лучше всего подойдет для обработки мягких металлов, а также жести, которая имеет маленькую толщину.
Если вы проводите обработку камня, то необходимо установить диск, который имеет размер 180 миллиметров. Далее нужно создать более усложненную схему регулятора. В данной схеме модулем управления будет являться микросхема КР1182ПМ1. Данная схема имеет контроль над силой тока при различных оборотах, а также делает потерю крутящего момента минимальной при уменьшении оборотов. При использовании такой схемы эксплуатация двигателя увеличивается.
Если угловая шлифовальная машина используется в качестве циркулярки, то нужно болгарку оснастить точкой подключения. Благодаря такой точки, осуществляется подключение, и регулировать обороты можно дистанционно. У вас получится отличный самодельный регулятор оборотов.
От того, как вы сделали регулятор, не зависит то, что это обязательный компонент угловой шлифовальной машины, который делает возможности работы шире и позволяет комфортно использовать данный строительный инструмент. Также после установки регулятора необходимо провести пробный запуска УШМ, чтобы проверить: не вырывается ли строительный инструмент из рук. Внешний регулятор оборотов для болгарки своими руками можно сделать.
Регулятор оборотов электродвигателя: принцип действия
Регулятор оборотов электродвигателя необходим для плавного разгона и торможения. Широкое применение получили такие устройства в промышленности. С их помощью изменяют скорость движения лент конвейера, вращения вентиляторов. Двигатели на 12 Вольт используются в системах управления и автомобилях. Все видели переключатели, которыми изменяется скорость вращения вентилятора печки в машинах. Это один из типов регуляторов. Только он не предназначен для плавного запуска. Изменение скорости вращения происходит ступенчато.
Применение частотных преобразователей
В качестве регуляторов оборотов электродвигателей 220В и 380В используются частотные преобразователи. Это высокотехнологичные электронные устройства, которые позволяют кардинально изменить характеристики тока (форму сигнала и частоту). В их основе находятся мощные полупроводниковые транзисторы и широтно-импульсный модулятор. Вся работа прибора управляется блоком на микроконтроллере. Изменение скорости вращения ротора двигателя происходит плавно.
Поэтому частотные преобразователи используются в нагруженных механизмах. Чем медленнее разгон, тем меньшие нагрузки будет испытывать конвейер или редуктор. Все частотники оснащены несколькими степенями защиты – по току, нагрузке, напряжению и прочими. Некоторые модели частотных преобразователей питаются от однофазного напряжения (220 Вольт), делают из него трехфазное. Это позволяет подключать асинхронные моторы дома без использования сложных схем. И не потеряется мощность при работе с таким устройством.
Для каких целей используются регуляторы
В случае с асинхронными двигателями регуляторы оборотов необходимы для:
- Существенной экономии электроэнергии. Ведь не в каждом механизме требуется большая скорость вращения мотора – порой ее можно уменьшить на 20-30%, а это позволит сократить расходы на электроэнергию вдвое.
- Защиты механизмов и электронных цепей. С помощью преобразователей частоты можно осуществлять контроль температуры, давления и многих других параметров. Если двигатель работает в качестве привода насоса, то в емкости, в которую он накачивает воздух или жидкость, нужно установить датчик давления. И при достижении максимального значения мотор просто отключится.
- Совершения плавного пуска. Нет необходимости использовать дополнительные электронные устройства – все можно сделать с помощью изменений настроек частотного преобразователя.
- Снижения расходов на техническое обслуживание. При помощи подобных регуляторов оборотов электродвигателей 220В снижается риск выхода из строя привода и отдельных механизмов.
Схема, по которой построены частотные преобразователи, широко распространена во многих бытовых приборах. Нечто подобное можно встретить в источниках бесперебойного питания, сварочных аппаратах, стабилизаторах напряжения, блоках питания компьютеров, ноутбуков, зарядниках телефонов, блоках розжига ламп подсветки современных ЖК-телевизоров и мониторов.
Как работают регуляторы вращения
Можно сделать своими руками регулятор оборотов электродвигателя, но для этого потребуется изучить все технические моменты. Конструктивно можно выделить несколько основных компонентов, а именно:
- Электродвигатель.
- Микроконтроллерную систему управления и блок преобразователя.
- Привод и механизмы, связанные с ним.
В самом начале работы, после подачи напряжения на обмотки, происходит вращение ротора двигателя с максимальной мощностью. Именно эта особенность отличает асинхронные машины от других. К этому прибавляется нагрузка от механизма, который приводится в движение. В итоге на начальном этапе мощность и потребляемый ток возрастают до максимума.
Выделяется очень много тепла. Перегреваются и обмотки, и провода. Применение частотного преобразователя поможет избавиться от этого. Если установить плавный пуск, то до максимальной скорости (которая также регулируется устройством и может быть не 1500 об./мин, а всего 1000) двигатель будет разгоняться не сразу, а на протяжении 10 секунд (каждую секунду по 100-150 оборотов прибавлять). При этом нагрузка на все механизмы и провода уменьшится в разы.
Самодельный регулятор
Самостоятельно можно сделать регулятор оборотов электродвигателя 12В. Для этого потребуется переключатель на несколько положений и проволочные резисторы. С помощью последних меняется напряжение питания (а вместе с ним и частота вращения). Аналогичные системы можно использовать и для асинхронных двигателей, но они менее эффективны. Много лет назад широко применялись механические регуляторы – на основе шестеренчатых приводов или вариаторов. Но они были не очень надежными. Электронные средства намного лучше себя показывают. Ведь они не такие громоздкие и позволяют более тонко настраивать привод.
Для изготовления регулятора вращения электродвигателя потребуется несколько электронных устройств, которые можно либо приобрести в магазине, либо снять со старых инверторных приборов. Неплохие результаты показывает симистор ВТ138-600 в схемах таких электронных устройств. Чтобы произвести регулировку, потребуется включить в схему переменный резистор. С его помощью изменяется амплитуда входящего на симистор сигнала.
Внедрение системы управления
Чтобы улучшить параметры даже самого простого устройства, потребуется в схему регулятора оборотов электродвигателя включить микроконтроллерное управление. Для этого нужно выбрать процессор с подходящим числом входов и выходов – для подключения датчиков, кнопок, электронных ключей. Для экспериментов можно применить микроконтроллер AtMega128 – самый популярный и простой в использовании. В свободном доступе можно найти множество схем с использованием этого контроллера. Самостоятельно их отыскать и применить на практике не составит труда. Чтобы он правильно работал, потребуется в него записать алгоритм – отклики на определенные действия. Например, при достижении температуры в 60 градусов (замер происходит на радиаторе прибора) должно произойти отключение питания.
В заключение
Если решите не делать самостоятельно устройство, а приобрести готовое, то обратите внимание на основные параметры, такие как мощность, тип системы управления, рабочее напряжение, частоты. Желательно произвести расчет характеристик механизма, в котором планируется использовать регулятор напряжения электродвигателя. И не забудьте сопоставить с параметрами частотного преобразователя.
Какие способы управления скоростью лучше всего?
Универсальный двигатель — это электродвигатель с последовательной обмоткой, который может работать как от переменного, так и от постоянного тока. Это много по сравнению с двигателями серии постоянного тока, но последовательный двигатель развивает меньший крутящий момент при работе от источника переменного тока, чем при работе от эквивалентного источника постоянного тока. Направление вращения можно изменить, поменяв местами соединения с полем относительно якоря, как в двигателе постоянного тока.
Универсальный двигатель работает аналогично серийному двигателю постоянного тока.С другой стороны, универсальный двигатель рассчитан на работу от переменного тока. Можно работать как на переменном, так и на постоянном токе. Таким образом, его развитие немного своеобразно. Обмотка возбуждения и обмотка якоря соединены последовательно; обе обмотки находятся под напряжением, когда на двигатель подается напряжение. Обмотки возбуждения и якоря создают магнитное поле, которое заставляет якорь вращаться. У скромных универсальных двигателей обычно нет вознаграждения и сменной обмотки; у них есть два выступающих полюса с обмоткой возбуждения.Отклик между магнитными полями вызывается мощностью переменного или постоянного тока.
Универсальный двигатель
Универсальный двигатель создает электрический крутящий момент, пропорциональный квадрату тока питания. Поскольку один и тот же ток протекает через обмотку возбуждения и якорь, из этого следует, что изменение переменного тока с положительного на отрицательное или с отрицательного на положительное одновременно влияет как на полярность потока поля, так и на направление тока через якорь. Это означает, что направление развиваемого крутящего момента останется положительным, и вращение продолжится в том же направлении.Таким образом, универсальный двигатель может работать как от постоянного, так и от переменного тока. Таким образом, электрический крутящий момент имеет одинаковое направление крутящего момента при любой полярности тока, а также при мощности переменного тока. Пусковой момент универсального двигателя определяется током, протекающим через якорь и обмотки возбуждения. Из-за индуктивного сопротивления этих обмоток пусковой переменный ток всегда будет меньше пускового постоянного тока . Следовательно, пусковой крутящий момент от сети переменного тока будет ниже, чем пусковой крутящий момент от источника постоянного тока.Характеристики универсального двигателя очень похожи на характеристики двигателей серии DC, но серийный двигатель развивает меньший крутящий момент при работе от источника переменного тока, чем при работе от эквивалентного источника постоянного тока.
Универсальные двигатели используются в различных областях, таких как дрели, стиральные машины, воздуходувки, кухонные приборы и т. Д. И они также используются для множества различных целей, где необходимы контроль скорости и высокое качество скорости. Мы также можем найти универсальные двигатели мощностью менее 1000 Вт.Универсальные двигатели с заданной мощностью значительно меньше других двигателей переменного тока, работающих на той же частоте.
Управление скоростью универсальных двигателей можно осуществить следующими способами.
- Управление фазовым углом
- ШИМ-управление прерывателем
В методе управления фазовым углом Управление скоростью достигается изменением угла зажигания для TRIAC. Контроль фазового угла — очень экономичное, но не очень эффективное решение. В методе ШИМ выпрямленное сетевое напряжение переменного тока переключается с высокой частотой с помощью силового MOSFET или IGBT-устройства, чтобы генерировать изменяющееся во времени напряжение для двигателя.В этом методе управления двигателями требуется стабильное управление скоростью, предотвращение больших токов и получение минимального гармонического тока от сети переменного тока. Для удовлетворения этих требований предпочтительно использовать прерыватель переменного тока с обратной связью по току и скорости.
Универсальный моторный привод переменного тока регулирует скорость вращения, используя фазово-угловую частоту. Этот метод заключается в изменении действующего напряжения, подаваемого на двигатель. В этом случае напряжение является функцией угла включения симистора.Непрерывное управление скоростью универсального двигателя, работающего на постоянном токе, очень легко осуществляется с помощью тиристорной схемы. Тиристор питает двигатель во время положительного полупериода сети. И тиристор, и его управление подключены таким образом, что противо-ЭДС двигателя компенсирует колебания нагрузки двигателя для регулировки скорости. Метод широтно-импульсной модуляции (ШИМ), также известный как привод прерывателя, используется для регулировки напряжения, подаваемого на двигатель. Изменяя рабочий цикл ШИМ, можно изменять эффективное напряжение, воспринимаемое двигателем.Преимущество ШИМ-модуляции в отношении фазовой частичности состоит в более высокой эффективности, меньшем акустическом шуме и лучшем поведении ЭМС, но это может повлиять на срок службы щетки.
В примере ниже обмотки возбуждения и якоря двигателя соединены последовательно через коммутатор якоря. Поэтому универсальный двигатель также известен как двигатель серии переменного тока или коллекторный двигатель переменного тока. Универсальным двигателем можно управлять как фазоинвертором. В этом приложении мы использовали технику управления фазовым углом для управления напряжением, подаваемым на двигатель.Фазовый сдвиг импульсов затвора позволяет изменять эффективное напряжение, воспринимаемое двигателем. Для фазового привода требуется только триак. Они являются частью семейства тиристоров и тесно связаны с кремниевыми выпрямителями. Однако, в отличие от SCR, которые являются однонаправленными устройствами, которые могут проводить ток только в одном направлении, TRIAC являются двунаправленными, и поэтому ток может течь в любом направлении, они чаще встречаются в схемах, таких как моторные приводы. TRIAC обычно используются в простых устройствах с низким энергопотреблением, таких как бытовые диммерные переключатели.
MOC3021 — это оптрон. Оптопара соединяет стороны входа и выхода лучом света, модулируемым входным током. Он преобразует полезный входной сигнал в свет, отправляет его через диэлектрический канал, улавливает свет на выходной стороне и преобразует его обратно в электрический сигнал. Обычно они поставляются в небольшом 6-контактном или 8-контактном корпусе ИС, но по сути представляют собой комбинацию состоит из двух различных устройств: оптического передатчика, обычно светодиода из арсенида галлия, и оптического приемника, такого как фототранзистор или диакритический элемент, управляемый светом.Они разделены прозрачным барьером, который блокирует электрический ток между ними, но пропускает свет. Серия MOC3020 состоит из инфракрасных излучающих диодов на основе арсенида галлия, оптически связанных с кремниевым двусторонним переключателем. Они разработаны для приложений, требующих изолированного срабатывания симистора.
Теперь у вас есть представление об универсальных двигателях, если у вас есть дополнительные вопросы по этой теме или электрические и электронные проекты, оставьте в разделе комментариев ниже.
Универсальные проекты на основе двигателей
Кредит на фото
Окончательное руководство по электросамокатам »Руководство по электросамокатам
Это исчерпывающее руководство по электросамокатам. Это отправная точка для всей информации об их истории, различных компонентах, поездках на работу, законах, безопасности, обслуживании и совместном использовании скутеров.
Не уверены, что вы попали в нужное место? У нас есть много других гидов.
Оглавление
- Электроскутеры
- Анатомия электросамоката
- Аккумуляторы
- Тормоза
- Контроллер
- Дека
- Руль
- Фары
- Мотор
- Шток
- Подвеска
- Шины
- Покупка электросамоката
- Поездки на работу
- Законы
- Безопасность
- Ремонт и обслуживание
Электросамокаты
Электрические самокаты, такие как самокаты Razor 1990-х годов, имеют два колеса, платформу, называемую палубой, и рули для руля.Они отличаются от безмоторных самокатов 90-х годов добавлением аккумулятора, электроники, более крупных (часто с воздушным наполнением) шин и электродвигателя.
Хотя большинство скутеров предназначены для езды стоя на палубе, некоторые скутеры можно преобразовать в сидячие электрические скутеры с дополнительными аксессуарами.
В последнее время наблюдается огромный всплеск интереса к скутерам — в основном из-за их печально известного в одночасье появления в городах компаний по аренде скутеров, таких как Lime и Bird.
Совместное использование самокатов повысило осведомленность широкой общественности о микромобильности и стимулировало рост личного рынка. Бурный рост личного рынка привел к импорту сотен различных моделей электросамокатов огромного количества различных брендов.
Хотя большинство компаний производят электрические скутеры для взрослых, некоторые компании, в частности Razor, ориентированы на рынок детей и подростков.
Для взрослых
Электросамокаты для взрослых являются наиболее распространенным типом самокатов, доступных на рынке.Они отличаются от электрических самокатов, предназначенных для детей, тем, что имеют большую грузоподъемность, обычно около 220 фунтов (100 кг), более мощные двигатели, большую батарею, большую платформу и более высокий вынос. Электрические самокаты, предназначенные для взрослых, также, как правило, стоят не менее 300 долларов, тогда как электросамокаты, предназначенные для детей, обычно можно купить менее чем за 200 долларов.
Некоторые популярные марки электросамокатов для взрослых: Boosted, Glion, GoTrax, Xiaomi, Swagtron, Zero и Fluid FreeRide, Kaabo и MiniMotors.
Некоторыми известными моделями являются Xiaomi Mi M365, Dualtron, Wide Wheel, Zero 10X, Boosted Rev и Wolf Warrior 11.
Типичный взрослый самокат весит менее 30 фунтов, имеет двигатель мощностью 250 Вт и литиевый аккумулятор мощностью 250 Вт · ч. -ионный аккумулятор, имеет максимальную скорость 15 миль в час, дальность действия 10 миль и стоит около 500 долларов.
Для детей
Электрические самокаты, предназначенные для детей и подростков, обычно меньше, легче и дешевле, чем их взрослые аналоги. Они часто сделаны из менее прочных материалов, таких как пластик, имеют слабые двигатели и могут даже содержать свинцово-кислотные батареи с низкой плотностью энергии.
Следует отметить, что детские электросамокаты, как правило, не более чем игрушки и должны использоваться как таковые. Их нельзя использовать для езды по дорогам общего пользования или взрослых.
Некоторые популярные марки электрических самокатов для детей: Razor и Jetson.
Типичный детский электросамокат весит около 20 фунтов, имеет двигатель мощностью 150 ватт, батарею на 100 ватт-часов (герметизированную свинцово-кислотную или литий-ионную), дальность действия 3 мили и стоит около 200 долларов.
Примечание. Подросткам постарше или выше следует использовать взрослый электросамокат, потому что детский самокат, скорее всего, будет слишком маленьким и недостаточно мощным.
Сидячие
Сидячие электросамокаты в первую очередь предназначены для взрослых и созданы для того, чтобы сделать длительные поездки более комфортными. Большинство электросамокатов не имеют сиденья, но у многих есть дополнительные крепления для сиденья, которые продаются как отдельные аксессуары.
Отличительной чертой современного электронного самоката является его способность складываться, что делает его портативным для переноски и удобным для хранения. Это главное преимущество складных электросамокатов по сравнению с электровелосипедами. Когда к электросамокату добавляется сиденье, это обычно лишает его возможности складывания и, на наш взгляд, снижает многие преимущества складных электросамокатов.
Если вам нужен самокат с сиденьем, то вы можете подумать об электрическом велосипеде. На электрических велосипедах, как правило, легче ездить, они быстрее и удобнее на большие расстояния. Вы не можете сложить их для удобства переноски, но и сидячий электросамокат тоже не сложите.
Анатомия электрического самоката
Детали электрического самоката
Электроскутеры состоят из нескольких различных частей, но основными из них являются: аккумуляторы, тормоза, контроллер, дека, руль, фары, мотор, вынос, подвеска и шины.
Аккумуляторы
Аккумуляторные батареи для электросамокатов состоят из множества отдельных ячеек, собранных вместе.
Аккумуляторы — это «бензобак» электросамоката. В них накапливается энергия, потребляемая электродвигателем и другими аксессуарами, включая лампы.
Большинство электросамокатов имеют аккумуляторную батарею, состоящую из литий-ионных аккумуляторных элементов, хотя в некоторых детских электросамокатах и других недорогих самокатах действительно есть свинцово-кислотные батареи.
Аккумуляторы измеряются в ватт-часах, сокращенно Wh, что является мерой их емкости. Емкость аккумулятора — один из важных факторов, определяющих запас хода электросамоката. Типичный бюджетный скутер будет иметь мощность около 250 ватт-часов, в то время как монстр-скутеры могут иметь мощность почти 3000 ватт-часов.
Подробнее: техническое руководство по аккумуляторам для электросамокатов.
Тормоза
Качественная тормозная система, такая как на изображении дискового тормоза выше, необходима для обеспечения безопасности и контроля при езде на электросамокате.
Электроскутер замедляется, как в автомобиле или велосипеде. Тормоза для электросамокатов можно разделить на две категории: механические и электронные.
Механические тормозные системы — это системы, в которых для замедления самоката используется физический механизм: дисковые, барабанные и ножные тормоза.
Электронные тормозные системы основаны на использовании самого двигателя для торможения и включают строго электронные и рекуперативные тормозные системы.
Обычно механические тормозные системы обеспечивают более сильное торможение, чем электронные системы.Однако преимущества электронных систем заключаются в том, что они не требуют периодической регулировки или обслуживания.
Многие скутеры будут иметь комбинацию электронной и механической тормозных систем. Из соображений безопасности мы рекомендуем скутеры, у которых есть как минимум две тормозные системы на случай отказа одной.
Подробнее о тормозах: техническое руководство по тормозам.
Контроллер
Контроллер скорости передает мощность на двигатель в зависимости от входного сигнала акселератора.
Регулятор скорости — это электронный компонент, спрятанный глубоко внутри скутера, который контролирует поток тока от батареи к двигателю.Обычно они выглядят как прямоугольные металлические банки, из которых выходит множество проводов. Металлический корпус служит синхронизатором тепла. Контроллер получает входные данные от органов управления акселератором и (электронным) тормозом и преобразует их в ток, который подается на двигатель.
Контроллеры рассчитаны на основе напряжения и тока, которые они могут регулировать. У скутеров с более мощными двигателями будут контроллеры с более высоким максимальным напряжением и максимальным номинальным током.
Контроллеры — одна из самых недооцененных частей электросамоката, потому что большую часть времени они тихо выполняют свою работу.Они могут стать серьезным источником головной боли (или сделать самокат небезопасным), когда что-то пойдет не так. Известно, что на некоторых плохо спроектированных самокатах контроллеры выходят из строя или выходят из строя.
Дека
Дека — это платформа, на которой вы стоите во время езды. Многие прорезинены для лучшего сцепления.
Электроскутер, как и скейтборд, — это то, на чем вы стоите. Некоторые электрические самокаты имеют аккумуляторную батарею, встроенную в деку.
Большинство колод имеют текстурированную отделку, которая обеспечивает лучшее сцепление между вашей обувью и самокатом.У некоторых самокатов, таких как Rev, изображенный выше, наклонная дека, что дает вам больше места для ног.
Типичный размер деки скутера составляет 14 на 5 дюймов, что обеспечивает дорожный просвет в несколько дюймов.
Руль
Руль — это ваша главная связь с самокатом. Они оснащены всеми элементами управления, включая акселератор, тормоза, отображение скорости / настроек и кнопки питания.
Самые портативные электрические скутеры будут иметь складывающиеся рули, которые значительно уменьшают их ширину и уменьшают самокат до очень портативных и удобных для хранения размеров.
Фары
Хорошее освещение для скутеров важно для того, чтобы видеть и оставаться видимыми в ночное время. К сожалению, многие из тестируемых нами самокатов имеют тусклое встроенное освещение.
Почти каждый электросамокат оснащен как минимум одной светодиодной фарой и задним фонарем с тормозом. Кроме того, многие скутеры также оснащены разноцветными светодиодами, которые светятся вокруг или светятся из-под палубы. Мы любим называть этот тип освещения swag lighting.
Swag и освещение палубы хороши для увеличения видимости и прохлады вашего скутера, но не могут заменить мощные фары и задние фонари.
К сожалению, у многих электросамокатов очень слабое освещение. Вот почему мы почти всегда рекомендуем дополнительное освещение для безопасной езды ночью.
Мотор
Электроскутеры для взрослых имеют ступичные двигатели, встроенные в одно или оба колеса. Изображенная выше силовая установка Wide Wheel оснащена двумя двигателями мощностью 500 Вт.
Электроскутеры имеют бесщеточные электродвигатели постоянного тока (BLDC), которые встроены в ступицы колес. Все электрические самокаты имеют как минимум один двигатель, а у более мощных — два.
Электродвигатели рассчитываются на основе потребляемой мощности, выраженной в ваттах. Более мощные двигатели будут иметь большую мощность.
Средний электросамокат, такой как Mi M365, будет иметь двигатель мощностью 250 Вт; скутер среднего уровня, такой как Horizon, будет иметь двигатель мощностью 500 Вт; самокаты с экстремальными характеристиками, такие как Wolf Warrior, будут иметь два двигателя мощностью 1200 Вт.
См. Наше техническое руководство по электродвигателям для электросамокатов.
Шток
Вынос представляет собой складывающуюся металлическую трубку, которая соединяет руль с передними колесами.На некоторых электросамокатах механизм складывания является источником неудобств из-за нестабильности.
Вынос или шейка электросамоката — это длинная труба, которая соединяется с передним колесом и продолжается до руля.
Почти у каждого самоката есть механизм складывания, встроенный в вынос, чтобы облегчить переноску и хранение. В наших обзорах электросамокатов мы часто уделяем много времени этой ничего не подозревающей части. Тем не менее, на это есть веские причины. Механизм складывания может быть трудным или, что еще хуже, быть незакрепленным или нестабильным.Когда вы прикладываете силу к рулю, вы заметите, что весь вынос руля раскачивается назад и четвертое — это состояние мы называем колебанием выноса . Это один из огромных недостатков складных электросамокатов.
К сожалению, плохие механизмы складывания выноса страдают не только самокаты эконом-класса. Скутеры Dualtron высокого класса печально известны этой проблемой, несмотря на их огромное качество.
Подвеска
Многие электрические скутеры не имеют подвески, в то время как высокопроизводительные, такие как Zero 8X, показанный выше, имеют мощную гидравлическую подвеску с катушкой.
Подвеска электросамоката, как и у автомобиля или велосипеда, помогает улучшить ходовые качества и амортизировать неровности дороги.
Существует три основных типа систем подвески, которые обычно используются на электросамокатах: пружинная, гидравлическая или пневматическая, и резиновая подвеска. Самокаты с лучшей подвеской будут иметь некоторую комбинацию пружины и поршня — комбинацию, называемую катушкой над гидравликой или катушкой над воздухом.
Многие скутеры отказываются от подвески в пользу больших пневматических шин, обеспечивающих демпфирующий эффект.Большие пневматические шины могут быть лучшей формой подвески, чем дешевые пружинные подвески.
Шины
Шины, обеспечивающие тягу для ускорения или торможения в аварийной ситуации. Безвоздушные шины, подобные тем, которые изображены выше, не работают так же хорошо, как пневматические шины.
Шины обеспечивают связь с дорогой и влияют на качество езды, тягу, запас хода и эффективность торможения вашего электрического самоката.
Шины бывают двух основных типов: пневматические (с воздушным наполнением) и безвоздушные.Существует несколько разновидностей безвоздушных шин, в том числе: сотовые, заполненные полимером , и сплошные.
Мы всегда рекомендуем пневматические шины, потому что они обеспечивают лучшее качество езды (с подвеской или без нее), а их эластичная резина намного лучше работает в неблагоприятных дорожных условиях.
Чтобы узнать больше о шинах для скутеров, прочтите наше техническое руководство.
Покупка электросамоката
Покупка электросамоката может оказаться непростой задачей: существует огромное количество вариантов, качественный электросамокат легко стоит 500 долларов, а может стоить и более 2000 долларов.Ключом к решению этой проблемы являются многочисленные сомнительные сайты «обзоров» и рецензенты, которые никогда в жизни не касались самокатов.
Мы протестировали и создали объективные письменные и видеообзоры для множества самокатов, чтобы вы могли найти тот, который лучше всего соответствует вашим потребностям.
Поездки на работу
Поездки на электросамокате — это часть новой тенденции в области микромобильности, которая решает так называемую проблему последней мили . Проблема последней мили относится к последнему этапу поездки — будь то прогулка от автобусной остановки до вашего офиса или выезд с автострады на машине, чтобы добраться до определенного пункта назначения.
Парадоксально, но отрезок пути обычно самый медленный и самый трудный, несмотря на то, что он самый короткий. Это связано с тем, что системы общественного транспорта и дороги оптимизированы для соединения крупных населенных пунктов, разделенных большими расстояниями. Подумайте об этом — многополосные автомагистрали соединяют крупные города, разделенные десятками или сотнями миль. На средней скорости по автостраде вы можете проехать 60 миль за час или около мили в минуту.
Однако, как только вы выедете с автострады, ваша последняя миля может занять 15 минут или больше!
Именно здесь в игру вступают электросамокаты, велопрокат, электрические скейтборды и т. Д. — все формы микромобильности.Они делают последнюю милю вашего путешествия быстрее, проще и экологичнее.
Если вам нужно проехать всего несколько километров до работы или нужно идти пешком от автобусной остановки или транзитного центра, то электрический скутер — идеальный вариант для вас.
Электроскутеры по сравнению с велосипедами
По сравнению с велосипедами электросамокаты более портативны, менее подвержены кражам и требуют меньше физических усилий, чем велосипед. Они позволяют без физических усилий добраться до пункта назначения со скоростью около 15 миль в час.Вы можете быстрее добраться до места назначения, сложить скутер и унести его внутрь. Поскольку они не требуют никаких физических усилий, вы не будете вспотевать, как если бы вы ездили на велосипеде с такой скоростью.
У них также есть некоторые недостатки, которые в некоторых случаях могут сделать велосипеды лучшим вариантом. Это: способность вносить внутрь, стабильность и стоимость.
Если вы физически не можете или не можете пронести электросамокат внутрь, то велосипед может быть лучше. Запирать электросамокат на улице в течение длительного периода времени не оптимально — они, кажется, более подвержены кражам, вандализму и их сложнее заблокировать из-за отсутствия точек запирания.
Велосипеды благодаря своей геометрии и большим шинам более устойчивы и лучше двигаются по неровной дороге. У взрослых самокатов относительно маленькие шины, которые не так легко перекатываются по неровностям. У них также есть более прямой угол поворота, что делает их по своей природе менее устойчивыми и более склонными к колебаниям , которые сбили с толку многих скутеров.
Наконец, электросамокаты для взрослых дороже качественных велосипедов начального уровня. Велосипед начального уровня будет стоить около 300 долларов и будет намного прочнее.Сбой на велосипеде вряд ли нанесет больше всего вреда, в то время как многие самокаты, особенно бюджетные, могут полностью выйти из строя после аварии.
Законы
Прежде чем кататься на электросамокате для взрослых по дорогам или в общественных местах, обязательно ознакомьтесь с местными законами и законами штата. Приведенную здесь информацию о законах не следует воспринимать как юридическую консультацию.
Законы об электросамокатах сильно различаются в зависимости от штата и города. В некоторых юрисдикциях использование моторизованных электросамокатов полностью запрещено.
В целом, там, где они легальны, большинство юрисдикций начинают регулировать их так же, как велосипеды. Как правило, на них следует ездить по улице или по велосипедным дорожкам, им запрещено ездить по тротуарам или пешеходным дорожкам.
Как и велосипед, вы должны соблюдать все правила дорожного движения, которых должны придерживаться автомобили. Это включает остановку на знаках остановки и на красный свет.
Безопасность
Безопасность — это не шутки: вы можете погибнуть или навсегда искалечить, управляя электросамокатом.
Защитное снаряжение, включая шлем, абсолютно необходимо при езде на электросамокате на любой скорости. В зависимости от скорости и типа условий катания вам может потребоваться больше или меньше оборудования.
Узнайте больше о том, какой тип шлема вам следует носить, в нашем руководстве по шлемам для электросамокатов.
Защитное оборудование, которое может предотвратить несчастные случаи и смягчить травмы, включает:
- Шлем
- Перчатки
- Наколенники
- Налокотники
- Защитная куртка и брюки
- Фары
- Рог
Для получения дополнительной информации см. статьи по безопасности электросамокатов.
Ремонт и обслуживание
Электросамокаты не требуют регулярного ухода, кроме проверки давления, если у них есть пневматические (воздухонаполненные) шины.
Если вы ищете информацию о ремонте, техническом обслуживании или обновлении, ознакомьтесь с нашими подробными руководствами для различных электросамокатов (все время добавляются новые).
Узнайте, где можно получить ремонт электросамоката.
Двигатель с оптимальной скоростью регулировки — Отличные предложения по двигателю с регулировкой скорости от продавцов двигателей с глобальной регулировкой скорости
Отличные новости !!! Вы находитесь в нужном месте для регулировки скорости двигателя.К настоящему времени вы уже знаете, что что бы вы ни искали, вы обязательно найдете это на AliExpress. У нас буквально тысячи отличных продуктов во всех товарных категориях. Ищете ли вы товары высокого класса или дешевые и недорогие оптовые закупки, мы гарантируем, что он есть на AliExpress.
Вы найдете официальные магазины торговых марок наряду с небольшими независимыми продавцами со скидками, каждый из которых предлагает быструю доставку и надежные, а также удобные и безопасные способы оплаты, независимо от того, сколько вы решите потратить.
AliExpress никогда не уступит по выбору, качеству и цене. Каждый день вы будете находить новые онлайн-предложения, скидки в магазинах и возможность сэкономить еще больше, собирая купоны. Но вам, возможно, придется действовать быстро, поскольку этот двигатель с максимальной регулировкой скорости скоро станет одним из самых популярных бестселлеров. Подумайте, как вам будут завидовать друзья, когда вы скажете им, что приобрели мотор регулировки скорости на AliExpress.Благодаря самым низким ценам в Интернете, дешевым тарифам на доставку и возможности получения на месте вы можете еще больше сэкономить.
Если вы все еще не знаете, как отрегулировать скорость двигателя и думаете о выборе аналогичного товара, AliExpress — отличное место для сравнения цен и продавцов. Мы поможем вам решить, стоит ли доплачивать за высококачественную версию или вы получаете столь же выгодную сделку, приобретая более дешевую вещь.А если вы просто хотите побаловать себя и потратиться на самую дорогую версию, AliExpress всегда позаботится о том, чтобы вы могли получить лучшую цену за свои деньги, даже сообщая вам, когда вам будет лучше дождаться начала рекламной акции. и ожидаемая экономия.AliExpress гордится тем, что у вас всегда есть осознанный выбор при покупке в одном из сотен магазинов и продавцов на нашей платформе. Реальные покупатели оценивают качество обслуживания, цену и качество каждого магазина и продавца.Кроме того, вы можете узнать рейтинги магазина или отдельных продавцов, а также сравнить цены, доставку и скидки на один и тот же продукт, прочитав комментарии и отзывы, оставленные пользователями. Каждая покупка имеет звездный рейтинг и часто имеет комментарии, оставленные предыдущими клиентами, описывающими их опыт транзакций, поэтому вы можете покупать с уверенностью каждый раз. Короче говоря, вам не нужно верить нам на слово — просто слушайте миллионы наших довольных клиентов.
А если вы новичок на AliExpress, мы откроем вам секрет.Непосредственно перед тем, как вы нажмете «купить сейчас» в процессе транзакции, найдите время, чтобы проверить купоны — и вы сэкономите еще больше. Вы можете найти купоны магазина, купоны AliExpress или собирать купоны каждый день, играя в игры в приложении AliExpress. Вместе с бесплатной доставкой, которую предлагают большинство продавцов на нашем сайте, мы думаем, вы согласитесь, что вы получите adjust speed motor по самой выгодной цене.
У нас всегда есть новейшие технологии, новейшие тенденции и самые обсуждаемые лейблы.На AliExpress отличное качество, цена и сервис всегда в стандартной комплектации. Начните самый лучший шоппинг прямо здесь.
Что такое заглушка для электродвигателей?
Обычно существует три типа электрического торможения двигателей: рекуперативное торможение, динамическое торможение и заглушка. Из трех методов заглушка обеспечивает наиболее быструю остановку, но она может быть опасной как для электрических, так и для механических компонентов.По этой причине это наименее используемый метод торможения, но он подходит для некоторых приложений.
Забивание электрических и механических компонентов может быть более опасным, но оно обеспечивает более быструю остановку, чем методы динамического торможения.Изображение предоставлено: secs.oakland.edu
Подключение — иногда называемое «торможением обратным током» — возможно как на двигателях постоянного тока, так и на асинхронных двигателях переменного тока. Для двигателей постоянного тока включение достигается изменением полярности напряжения якоря.Когда это происходит, напряжение обратной ЭДС больше не противодействует напряжению питания. Вместо этого обратная ЭДС и напряжение питания работают в одном направлении, противодействуя вращению двигателя и заставляя его почти мгновенно останавливаться. Обратный ток, создаваемый объединенным напряжением питания и обратной ЭДС, чрезвычайно высок, поэтому в цепи помещено сопротивление для ограничения тока.
Цепи двигателя постоянного тока для нормальной работы двигателя (слева) и для подключения (справа). Обратите внимание, что для операции включения напряжение якоря меняется на противоположное, и к цепи добавляется сопротивление.Для асинхронных двигателей переменного тока напряжение статора реверсируется путем переключения любых двух проводов питания. Затем поле вращается в противоположном направлении, и скольжение двигателя (разница между скоростью вращающегося магнитного поля статора и скоростью ротора) становится больше единицы (s> 1). Другими словами, ротор вращается быстрее, чем вращающееся магнитное поле в статоре. Крутящий момент развивается в направлении, противоположном вращению двигателя, что дает сильный тормозной эффект.
Скольжение, представляющее собой разницу между скоростью вращающегося магнитного поля статора и скоростью ротора, является фундаментальным свойством асинхронных двигателей переменного тока. При нормальной работе двигателя ротор вращается с меньшей скоростью, чем вращающееся магнитное поле статора.
Когда скорость двигателя достигает нуля, если он не отключен от источника питания, он начинает реверсировать или вращаться в противоположном направлении. В некоторых приложениях целью является изменение направления двигателя.Но когда для торможения двигателя используется вставка, переключатель нулевой скорости или подключаемый контактор используется для отключения двигателя от источника питания, когда его скорость достигает нуля.
Одна из потенциальных проблем, связанных с закупоркой в качестве метода торможения (особенно при коротком времени торможения), заключается в том, что может быть трудно затормозить двигатель точно на нулевой скорости. Еще одним недостатком заглушки является то, что она может вызвать высокие механические ударные нагрузки на двигатель и подключенное оборудование из-за резкой остановки, которую оно вызывает.Заглушка также является очень неэффективным методом остановки и, следовательно, выделяет значительное количество тепла.
Несмотря на эти недостатки, закупорка используется в таком оборудовании, как лифты, краны, прессы и мельницы, где требуется быстрая остановка двигателя (с реверсированием или без него).
Электроприводы — Двигатели постоянного тока
(Описание и применение)
Щеточные (возбуждаемые полем) двигатели (двигатели с обмотанными роторами)
Традиционному двигателю постоянного тока требуются два источника тока: один через обмотки статора для создания магнитного поля, а другой через обмотки ротора для взаимодействия с магнитным полем для создания движущей силы.Это можно сделать тремя способами, каждый из которых дает уникальные характеристики двигателя. Поскольку все они используют роторы с обмоткой, всем им нужен коммутатор для подачи тока в обмотки ротора.
Скорость регулируется путем изменения напряжения ротора и, следовательно, тока ротора, или путем изменения магнитного потока в воздушном зазоре путем изменения тока в обмотках возбуждения.
Имея доступ как к обмоткам возбуждения, так и к обмоткам ротора, все двигатели постоянного тока предлагают возможность простого управления скоростью и крутящим моментом.
- Обмотка серии
- Характеристики
- Приложения
- Шунтирующая рана
- Ослабление поля
- Характеристики
- Приложения
- с раздельным возбуждением
- Характеристики
- Приложения
Двигатель с последовательной обмоткой имеет только одно напряжение питания двигателя, а обмотка возбуждения соединена последовательно с обмоткой ротора.
У серийного двигателя плохая регулировка скорости. Он обеспечивает увеличивающийся крутящий момент с увеличением тока двигателя, но это происходит за счет скорости, которая падает с увеличением требуемого крутящего момента.
Этот двигатель имеет очень высокий пусковой крутящий момент, поскольку при нулевой скорости отсутствует обратная ЭДС, однако по мере увеличения скорости увеличивается и обратная ЭДС, вызывающая уменьшение крутящего момента.
Увеличение нагрузки на двигатель имеет тенденцию замедлять его, но это, в свою очередь, снижает обратную ЭДС и увеличивает крутящий момент, чтобы приспособиться к нагрузке.
Регулирование скорости возможно путем изменения напряжения питания.
В условиях холостого хода скорость возрастет до опасного уровня, что может привести к разрушению двигателя.
Двигатель можно реверсировать, поменяв местами соединения обмоток возбуждения или ротора, но не обоих.
Рекуперативное торможение невозможно, так как необходимо поддерживать ток возбуждения, но он падает, когда ток ротора проходит через ноль и меняется на противоположное.
Двигатели постоянного тока серии — это промышленная рабочая лошадка для электроприводов большой и малой мощности, фиксированной и регулируемой скорости.
Применения варьируются от дешевых игрушек до автомобильных приложений.
Они недорогие в производстве и используются в бытовых приборах с регулируемой скоростью, таких как швейные машины и электроинструменты.
Высокий пусковой крутящий момент делает его особенно подходящим для широкого спектра тяговых применений.
Двигатель с параллельной обмоткой также имеет только одно напряжение питания двигателя, но в этом случае обмотка возбуждения подключается параллельно обмотке ротора.
Скорость двигателя с параллельной обмоткой можно регулировать в ограниченной степени, не влияя на напряжение питания, с помощью «ослабления поля».Реостат, включенный последовательно с обмоткой возбуждения, можно использовать для уменьшения тока возбуждения. Это, в свою очередь, уменьшает поток в воздушном зазоре, и, поскольку скорость обратно пропорциональна потоку, двигатель будет ускоряться. Однако крутящий момент прямо пропорционален потоку в воздушном зазоре, так что увеличение скорости будет сопровождаться уменьшением крутящего момента.
Двигатель с параллельной обмоткой вращается с почти постоянной скоростью, если напряжение фиксировано.Двигатель может создавать увеличивающийся крутящий момент без заметного снижения скорости за счет увеличения тока двигателя.
Как и в случае с двигателем с последовательной обмоткой, двигатель с параллельной обмоткой можно реверсировать, поменяв местами соединения обмоток возбуждения или ротора.
Возможно рекуперативное торможение. Самовозбуждение поддерживает поле при изменении направления тока ротора.
Применения с фиксированной скоростью, например, дворники и вентиляторы автомобильных стекол.
Двигатель с независимым возбуждением имеет независимую подачу напряжения на обмотки возбуждения и ротора, что позволяет лучше контролировать характеристики двигателя.
Напряжение на обмотках возбуждения или ротора может использоваться для управления скоростью и крутящим моментом двигателя с независимым возбуждением.
Приложения для тяги поездов и автомобилей.
Двигатели с постоянными магнитами
Как следует из названия, в этих двигателях для обеспечения поля ротора или статора используются постоянные магниты, а не электромагниты. Они широко используются в небольших двигателях постоянного тока и все чаще в тяговых устройствах.
- Магниты ротора
- Полевые магниты
Это наиболее распространенные типы двигателей с постоянными магнитами.У них нет обмоток ротора, но используются постоянные магниты для питания поля ротора, и они ведут себя как двигатели постоянного тока с шунтирующей обмоткой с фиксированным шунтирующим током.
Их главное преимущество — отсутствие коммутатора.
Эти двигатели не имеют обмотки возбуждения, но используют постоянные магниты для создания магнитного поля. Ток по-прежнему подается на ротор через коммутатор, как и в других щеточных двигателях, и скорость может контролироваться путем изменения напряжения на обмотках ротора.Таким образом, их поведение похоже на поведение двигателя постоянного тока с последовательной обмоткой.
Двигатели с постоянными магнитами более подробно рассматриваются в разделе «Бесщеточные двигатели постоянного и переменного тока
».Универсальные моторы
В двигателе постоянного тока с последовательной обмоткой изменение направления проводов обмотки возбуждения или проводов обмотки ротора изменяет направление вращения двигателя. Однако простое реверсирование выводов от источника питания не повлияет на направление вращения, поскольку это эквивалентно реверсированию тока через обе отдельные обмотки — по сути, это двойное реверсирование.Другими словами, двигатель будет вращаться в том же направлении, даже если ток через последовательные обмотки будет обратным. Это означает, что двигатель может работать как на переменном, так и на постоянном токе, поскольку направление вращения не зависит от направления тока через последовательные обмотки.
Универсальные двигатели часто используются в электроинструментах и бытовой технике, например, в пылесосах и миксерах.Подробнее об универсальных двигателях.
Основы электрических машин
Бесщеточные двигатели постоянного и переменного тока
Двигатели переменного тока
Контроллеры скорости двигателя — как они работают (PMDC BLDC и AC, управление крутящим моментом и скоростью)
Для справки (в основном моей) мой пост о том, как работают контроллеры двигателей PMDC, находится здесь: Как работает контроллер (PMDC) (чтобы вы могли видеть).
Я пытаюсь понять, как на самом деле работают контроллеры, помимо простой аналогии с широтно-импульсной модуляцией, потому что я знаю, что это намного сложнее. Кроме того, мне становится ясно, что не только разные типы двигателей имеют разные характеристики кривых мощности, но вы не можете выделить в этом части контроллера. То есть, да, конструкции двигателей имеют разные основные черты, но контроллеры, которые ими управляют, тоже есть — в основном из-за того, что контроллер может (и должен делать), чтобы заставить двигатель вращаться.Ясно как грязь?
Как насчет аналогии с бензиновыми двигателями? Небольшой блочный 4-цилиндровый двигатель с турбонаддувом и впрыском топлива выдает мощность иначе, чем большой блок V8 с 4-цилиндровым двигателем, но на самом деле в конечном итоге может обеспечить такое же количество мощности. Я могу намного больше контролировать на маленьком 4-цилиндровом двигателе из-за турбонаддува и EFI, верно? На V8 я могу просто залить им больше бензина на 4 ствола. Примерно так — бесщеточный двигатель переменного тока имеет гораздо больше возможностей, чем обычный контроллер.Как обычно, аналогия, вероятно, вызывает больше вопросов, чем дает ответов. Ну что ж. Я старался.
Есть некоторые фундаментальные различия между тем, как контроллер мотора работает для щеточного двигателя PMDC и бесщеточного двигателя. Любой контроллер двигателя должен работать с каким-то устройством, которое знает, где находится двигатель (во время его вращения) и знает, когда подавать ток. В двигателе PMDC для этого используются щетки и коммутатор — физическое прикосновение к контакту, который размыкается и «заставляет» включать ток.В бесщеточном двигателе этого нет, и вместо этого используются датчики для определения положения. Я попытаюсь понять это, не вдаваясь в подробности о различных типах бесщеточных двигателей, а пока просто расскажу о бесщеточных двигателях постоянного тока.
Итак, я пошел искать информацию о контроллерах и нашел ее на сайте DigiKey: Использование управления замкнутым контуром в системах BLDC. Вся эта страница довольно устрашающая, но дала некоторые действительно простые объяснения, которые заставили меня осмыслить.Также некоторые основные сведения о различиях между щеточными и бесщеточными двигателями. Здесь:
Преимущества двигателей BLDC перед щеточными двигателями постоянного тока:
- Высокая эффективность
- Более надежный и без дуги при коммутации — без щеток для обслуживания
- Более высокая скорость и соотношение мощности и габаритов
- В статоре выделяется тепло — легко снимается
- Меньшая инерция — без коммутатора
- Более высокая скорость разгона
Двигатели BLDC более эффективны, чем щеточные двигатели постоянного тока.При той же входной мощности двигатель BLDC преобразует больше электроэнергии в механическую мощность, чем щеточный двигатель, из-за отсутствия трения из-за щеток. В щеточной конструкции двигателя щетки используются для изменения полюсов электромагнита, чтобы двигатель продолжал вращаться. Из-за отсутствия щеток нет ничего, что могло бы механически обработать изменение полярности. В результате требуется электронный контроллер для непрерывного переключения фазы обмотки, которая будет поддерживать вращение двигателя.Для этого на обмотки статора подается питание в определенной последовательности, как показано на Рисунке 1. Двигатели BLDC имеют три фазы. Для движения двигателя в каждом цикле коммутации приводятся в действие две фазы. Одна фаза получает высокий уровень (VMotor), а другая — низкий уровень (GND). Оставшаяся фаза остается плавающей. На каждом этапе коммутации двигатель поворачивается на 60 градусов. По завершении всех циклов двигатель повернется на полные 360 градусов.
Рисунок 1: Выход датчика BLDC в зависимости отвремя коммутации.
Для реализации этой последовательности важно знать положение ротора. Это делается с помощью датчиков, таких как датчики на эффекте Холла (сенсорное управление), или путем измерения обратной ЭДС (бессенсорное управление). Датчики на эффекте Холла встроены в статор. Когда магнитные полюса ротора проходят рядом с датчиками Холла, они подают высокий или низкий сигнал, указывая на то, что северный или южный полюса проходят поблизости. Положение ротора определяется точной комбинацией сигналов трех датчиков Холла.
Sensored BLDC представлен в этом примечании к применению. Три датчика положения обеспечивают текущее положение ротора. Датчики положения переключаются на 180 электрических градусов электрического вращения. Временная диаграмма выходного сигнала датчика и требуемого напряжения привода двигателя показана на рисунке 1. Дополнительное использование широтно-импульсной модуляции (ШИМ) обеспечивает управление скоростью или крутящим моментом, как показано на фазах A, B и C на рисунке 1. цикл модулированного выходного управляющего сигнала (PWM) изменяется для изменения скорости и крутящего момента двигателя.
Я выделил два интересных момента. Во-первых, с трехфазным двигателем вы включаете две фазы и позволяете третьей плавать. Во-вторых, вы можете контролировать скорость и крутящий момент. Помните, что вольт = скорость, ток = крутящий момент, поэтому я переведу это как: мы можем контролировать как напряжение, так и ток импульсов. Хорошо, я чувствую, что мы чего-то добиваемся.
И, наконец, я добрался до основного источника: Основы управления двигателем: режимы работы привода через Carotron — компанию, занимающуюся контроллерами двигателей.
Вот синопсис:
1.) Приводы постоянного тока — Контроль крутящего момента:
Для управления крутящим моментом двигателей постоянного тока привод постоянного тока регулирует ток якоря.
Напряжение якоря не регулируется, что позволяет двигателю работать с любой скоростью, необходимой для достижения заданного уровня тока / момента.
2.) Приводы переменного тока — Контроль крутящего момента:
Привод переменного тока использует комплексную обработку напряжения двигателя, тока, частоты и положения вращения, чтобы обеспечить возможность регулирования крутящего момента.Работа в режиме МОМЕНТ обычно требует обратной связи от энкодера. Даже оценка способности инверторного привода регулировать крутящий момент не является простой задачей. Не думайте, что инвертор и двигатель, работающие в режиме «крутящего момента», будут создавать линейный и пропорциональный выходной крутящий момент относительно задания. Полный контроль крутящего момента может зависеть от использования внешнего опорного вращающего момента цепи или управления, который имеет гибкость и регулируемость, чтобы компенсировать любой привод / двигатель недостатков.
3.) Приводы постоянного тока — Контроль скорости (скорости):
Для регулирования скорости двигателя постоянного тока привод обычно регулирует напряжение якоря. Насколько хорошо это работает, зависит от того, какой сигнал обратной связи используется для представления скорости двигателя.
Общие варианты выбора для некоторых приводов постоянного тока следующие:
- AFB — Обратная связь якоря
- TFB — Обратная связь тахометра
- EFB — обратная связь энкодера
(не забудьте посмотреть ссылку на источник для получения дополнительной информации по этому вопросу.)
4.) Приводы переменного тока — Контроль скорости (скорости):
Преобразователи частотыAC Inverter могут иметь несколько выбираемых методов управления. Вот несколько примеров:
- Управление V / F (V / F, напряжение / частота — также называемое управлением вольт на герц)
- Управление V / F с PG или обратной связью тахометра
- Вектор разомкнутого цикла
- Замкнутый контур или вектор потока
V / F, напряжение / частота, Метод управления — также называемый управлением вольт на герц, является наиболее распространенным методом управления инвертором.Не требуя устройства обратной связи, он подходит для применения в двигателях общего назначения и с несколькими двигателями.
Управление напряжением / частотой с PG обратной связью обеспечивает лучшее регулирование скорости по сравнению с системой с обратной связью.
Вектор разомкнутого контура , иногда называемый бессенсорным вектором, использует более сложный алгоритм управления, чтобы обеспечить точное управление скоростью, быстрый отклик и более высокий крутящий момент на низкой скорости.