Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор – регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Простейший вариант
 Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
 Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
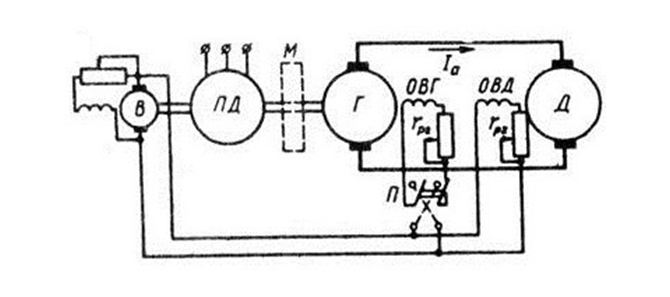
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
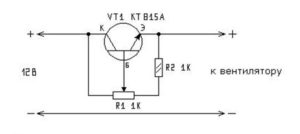
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
![]()
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.

Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины

Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
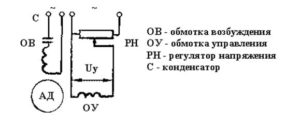
Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy),
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.

Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
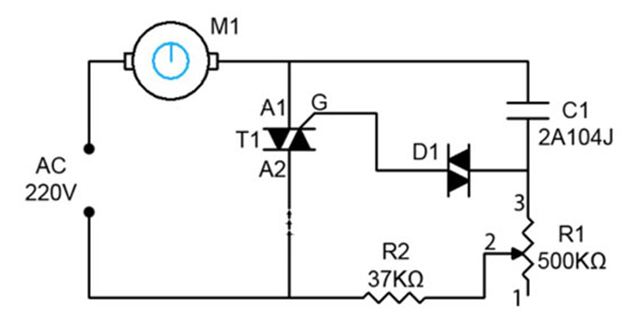
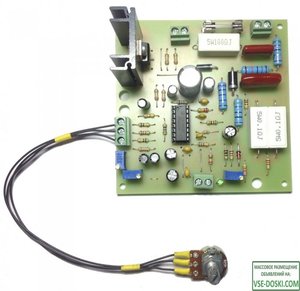
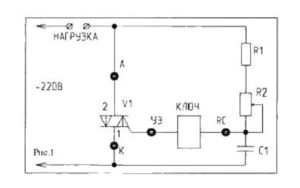 Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.

Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
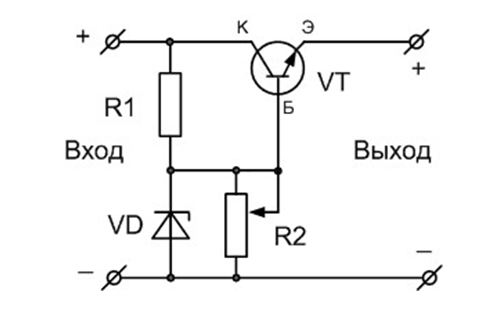
Схема стабилизатора постоянного тока

Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.

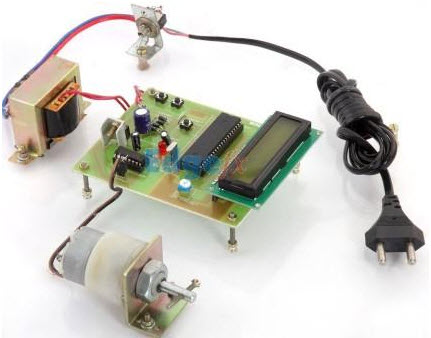
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
 Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Измерения
Понятно, что число оборотов нужно как-то определять. Для этого используют тахометры. Они показывают число вращения на данный момент. Обычным мультиметром просто так измерить скорость не получится, разве что на автомобиле.
Как видно, на электрических машинах можно менять различные параметры, подстраивая их под нужды производства и домашнего хозяйства.
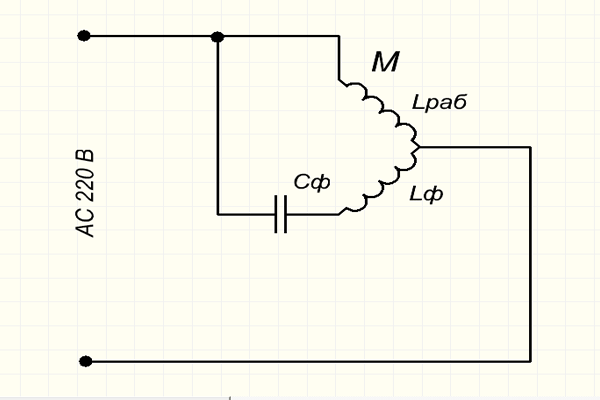
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.

Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
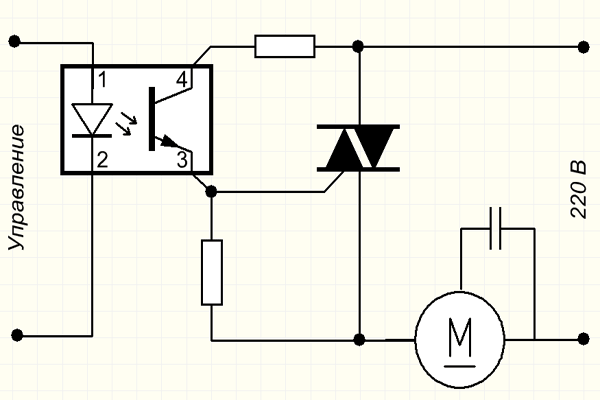
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
Xc=1/2πfC
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
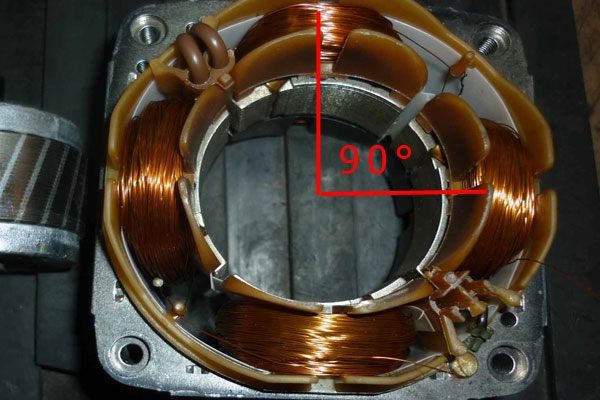
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
егулировка оборотов электродвигателя часто бывает необходима как в производственных, так и каких то бытовых целях. В первом случае для уменьшения или увеличения частоты вращения применяются промышленные регуляторы напряжения – инверторные частотные преобразователи. А с вопросом, как регулировать обороты электродвигателя в домашних условиях, попробуем разобраться подробнее.
Необходимо сразу сказать, что для разных типов однофазных и трехфазных электрических машин должны применяться разные регуляторы мощности. Т.е. для асинхронных машин применение тиристорных регуляторов, являющихся основными для изменения вращения коллекторных двигателей, недопустимо.
Лучший способ уменьшить обороты вашего устройства – не в регулировке частоты вращения самого движка, а посредством редуктора или ременной передачи. При этом сохранится самое главное – мощность устройства.
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Если нагрузка мала, то при случайном обрыве обмотки статора при использовании такой схемы частота вращения превысит максимально допустимую и электродвигатель может пойти “вразнос”
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
Регулировка оборотов электродвигателя постоянного тока с последовательно включенной обмоткой статора может производиться двумя способами:
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Электродвигатели коллекторные переменного тока
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Для улучшения характеристик в мощных (промышленных) коллекторных электродвигателях переменного тока применяются дополнительные полюса и компенсационные обмотки. В двигателях бытовых устройств таких приспособлений нет.
Регуляторы оборотов электродвигателя
Схемы изменения частоты вращения электродвигателей в большинстве случаев построены на тиристорных регуляторах, ввиду своей простоты и надежности.
Принцип работы представленной схемы следующий: конденсатор С1 заряжается до напряжения пробоя динистора D1 через переменный резистор R2, динистор пробивается и открывает симистор D2, управляющий нагрузкой. Напряжение на нагрузке зависит от частоты открывания D2, зависящее в свою очередь от положения движка переменного сопротивления. Данная схема не снабжена обратной связью, т.е. при изменении нагрузки обороты также будут меняться и их придется подстраивать. По такой же схеме происходит управление оборотами импортных бытовых пылесосов.
Вот так работает хороший регулятор оборотов двигателя:
Изменение скорости вращения вала двигателя в стиральной машине, например, происходит с задействованием обратной связи от таходатчика, поэтому ее обороты при любой нагрузке постоянны.
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),

- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Схема регулятора, с помощью которой осуществляется изменение частоту оборотов вращения двигателя или вентилятора, рассчитана на работу от сети переменного тока на напряжение 220 вольт.
Двигатель вместе с силовым тиристором VS2 подключен в диагональ диодного моста VD3, на другую же поступает сетевое напряжение переменного тока 220 вольт. Кроме того, этот тиристор осуществляет контроль достаточно широкими импульсами, благодаря чему, непродолжительные обрывы цепи, с которыми работают все коллекторные двигатели, не влияют на устойчивую работу схемы.
Управляет первым тиристором транзистор VT1, подключенный по схеме генератора импульсов. Как только напряжение на конденсаторе станет достаточным для открытия первого транзистора, на управляющий вывод тиристора поступит положительный импульс. Тиристор откроется и теперь уже на втором тиристоре появится длительный управляющий импульс. И уже с него напряжение, которое фактически и влияет на величину оборотов, поступает на двигатель.
Частоту оборотов вращения электродвигателя подстраивают переменным сопротивлением R1. Так как в цепь второго тиристора подсоединена индуктивная нагрузка, то возможно спонтанное открывание тиристора, даже в момент отсутствии управляющего сигнала. Поэтому для блокировки этого, в схему включен диод VD2 который подсоединен параллельно обмотке L1 двигателя.
Во время настройки схемы регулятора оборотов двигателя желательно использовать , которым можно измерить частоту вращения электродвигателя либо обычный стрелочный вольтметр для переменного тока, который подключают параллельно двигателю.
С помощью подбора сопротивления R3 задают диапазон изменения напряжения от 90 до 220 вольт. Если при минимальных оборотах двигатель работает некорректно, то требуется уменьшить номинал резистора R2.
Эта схема хорошо подходит для регулировки скорости вращения вентилятора в зависимости от температуры.
В роли чувствительного элемента используется . В результате его нагревания уменьшается его сопротивление, и поэтому на выходе операционного усилителя, наоборот напряжение увеличивается и через полевой транзистор управляет оборотами вентилятора.
Переменным сопротивлением P1 — можно задать наименьшую скорость вращения вентилятора при наименьшей температуре, а переменным сопротивлением P2 регулируют наибольшую скорость вращения при максимальной температуре.
В нормальных условиях настраиваем резистором P1 минимальные обороты двигателя. Затем нагревают датчик и сопротивлением P2 адают нужную частоту вращения вентилятора.
Схема управляет скоростью вентилятора в зависимости от показаний температур, с помощью обычного с отрицательным температурным коэффициентом.
Схема настолько проста, что в ней присутствует только три радиокомпонента: регулируемый стабилизатор напряжения LM317T и два сопротивления, образующие делитель напряжения. Одно из сопротивлений — термистор с отрицательным ТКС, а другое — обычный резистор. Для упрощения сборки рисунок печатной платы привожу ниже.
В целях экономии, можно оснастить регулятором оборотов типовую болгарку. Такой регулятор для шлифования корпусов различной радиоэлектронной аппаратуры является незаменимым инструментом в арсенале радиолюбителя
Все современные дрели выпускают с встроенными в них регуляторами числа оборотов двигателя, но наверняка, в арсенале каждого радиолюбителя имеется старая советская дрель, у которых изменение числа оборотов не было задумано, что, резко снижает эксплуатационные характеристики.
Регулировать скорость вращения асинхронного безколлекторного двигателя можно с помощью настройки частоты питающего переменного напряжения. Данная схема позволяет регулировать скорость вращения в довольно широком диапазоне — от 1000 до 4000 оборотов в минуту.
Некоторые ситуации требуют изменения оборотов двигателя от номинальных. Иногда требуется уменьшить обороты электродвигателя, потому что их увеличение негативно сказывается на подшипниковом аппарате. Способы изменения вращения зависят от модели электрической машины.
Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
- Простейший вариант
- В цепи якоря
- От сети
- Коллекторные машины
- Двухфазный двигатель
- Обычные асинхронники
- Измерения
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.
В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так к
 Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Виды двигателей
 Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
- однофазным,
- двухфазным,
- трехфазным.
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
 Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
- асинхронные,
- коллекторные.
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
 Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

Достоинства:
- большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
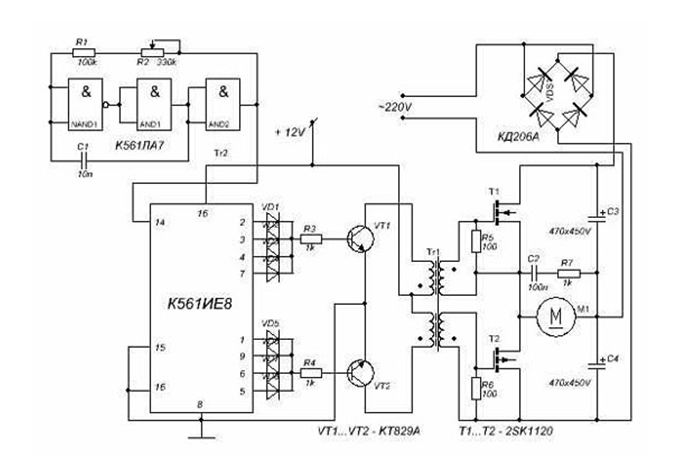
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Материалы по теме:
Управление скоростью двигателя постоянного тока является одной из наиболее полезных функций двигателя. Управляя скоростью двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать требуемую работу.
 Управление скоростью двигателя постоянного тока
Управление скоростью двигателя постоянного токаМеханизм управления скоростью применим во многих случаях, например, для управления движением транспортных средств-роботов, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник находится в магнитном поле, он испытывает механическую силу. В практическом двигателе постоянного тока якорь представляет собой ток, несущий проводник, и поле
,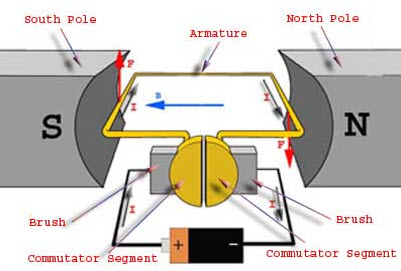 , , принцип работы двигателя постоянного тока,
, , принцип работы двигателя постоянного тока,, создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо увеличивает магнитный поток из-за обмоток возбуждения в одном направлении, либо нейтрализует магнитный поток из-за обмоток возбуждения.Накопление магнитного потока в одном направлении по сравнению с другим оказывает воздействие на проводник, и, следовательно, он начинает вращаться.
В соответствии с законом электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС. Эта ЭДС, в соответствии с законом Ленца, имеет тенденцию противостоять причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока обладает особой характеристикой регулировки крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Не пропустите: Бесщеточный двигатель постоянного тока Преимущества и области применения
Принцип регулирования скорости
Из приведенного выше рисунка уравнение напряжения простого двигателя постоянного тока составляет
В = Eb + IaRa
В — это подаваемое напряжение , Eb — обратная ЭДС, Ia — ток якоря, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянная
Z — количество проводников
N-скорость двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ((PøNZ) / 60A) + IaRa
Или V — IaRa = (PøNZ) / 60A
, т. Е. N = (PZ / 60A) (V — IaRa) / ø
. Вышеприведенное уравнение также можно записать в виде:
N = K (V — IaRa) / ø, K является константой
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Частота вращения двигателя обратно пропорциональна падению напряжения на якоре.
- Скорость двигателя обратно пропорциональна потоку из-за результатов полевых исследований
Таким образом, скорость двигателя постоянного тока можно регулировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и путем изменения тока через обмотку возбуждения
- путем изменения напряжения якоря и изменения сопротивления якоря
Не пропустите: преобразователей постоянного тока постоянного тока типа
3 способа регулирования скорости двигателя постоянного тока
1.Метод управления магнитным потоком
В этом методе магнитный поток, создаваемый обмотками возбуждения, изменяется для изменения скорости двигателя.
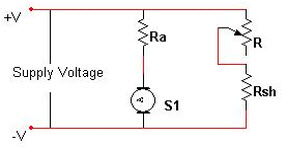 Метод управления магнитным потоком
Метод управления магнитным потокомПоскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, меняя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора, включенного последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор удерживается в своем минимальном положении, номинальный ток протекает через обмотку возбуждения благодаря номинальному напряжению питания, и в результате скорость поддерживается на нормальном уровне.Когда сопротивление постепенно увеличивается, ток через обмотку возбуждения уменьшается. Это в свою очередь уменьшает производимый поток. Таким образом, скорость двигателя увеличивается за пределы своего нормального значения.
2. Метод управления якоря
С помощью этого метода можно управлять скоростью двигателя постоянного тока, управляя сопротивлением якоря, чтобы контролировать падение напряжения на якоре. Этот метод также использует переменный резистор последовательно с якорем.
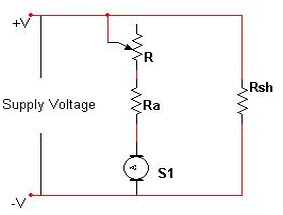 Метод управления якоря
Метод управления якоряКогда переменный резистор достигает своего минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре уменьшается. Это, в свою очередь, приводит к снижению скорости двигателя.
Этот метод достигает скорости двигателя ниже нормального диапазона.
3. Метод контроля напряжения
Оба вышеупомянутых метода не могут обеспечить управление скоростью в желаемом диапазоне. Кроме того, метод управления магнитным потоком может влиять на коммутацию, тогда как метод управления якоря включает в себя огромные потери мощности из-за использования резистора, включенного последовательно с якорем.Поэтому часто желателен другой метод — тот, который контролирует напряжение питания для управления скоростью двигателя.
При таком способе обмотка возбуждения получает фиксированное напряжение, а якорь получает переменное напряжение.
Один из таких способов контроля напряжения включает использование механизма переключения для подачи переменного напряжения на якорь, а другой использует генератор с приводом от переменного тока для подачи переменного напряжения на якорь (система Уорда-Леонарда).
Помимо этих двух методов, наиболее широко используемым методом является использование широтно-импульсной модуляции для достижения контроля скорости двигателя постоянного тока. ШИМ включает подачу импульсов переменной ширины на драйвер двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказывается очень эффективным, поскольку потери мощности поддерживаются на минимальном уровне и не предполагают использования какого-либо сложного оборудования.
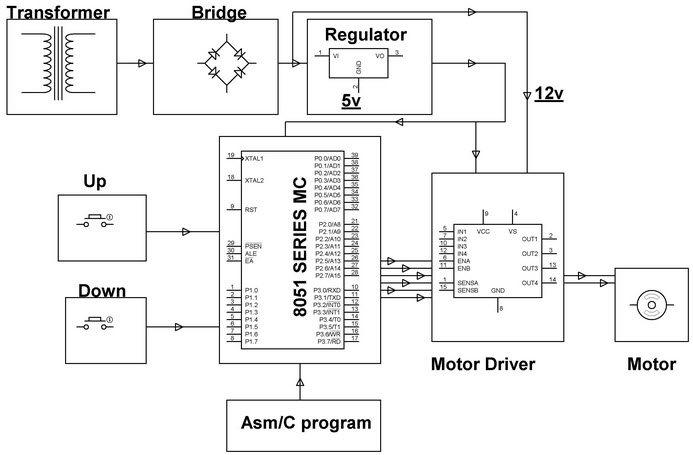 Метод управления напряжением
Метод управления напряжениемПриведенная выше блок-схема представляет собой простой регулятор скорости вращения электродвигателя.Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвером двигателя является микросхема L293D, которая состоит из цепей H-моста для управления двигателем.
ШИМдостигается путем изменения импульсов, подаваемых на вывод разрешения микросхемы привода двигателя для управления приложенным напряжением двигателя. Изменение импульсов осуществляется микроконтроллером, с входным сигналом от кнопок. Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения коэффициента заполнения импульсов.
Мы надеемся, что смогли предоставить подробное и актуальное описание управления скоростью двигателя постоянного тока. Вот простой вопрос для наших читателей: каковы другие методы управления приложенным напряжением, кроме ШИМ?
Пожалуйста, поделитесь своим мнением и ответом в разделе комментариев ниже.
от Bert MarkgrafUddated 16 марта 2018 г.
Двигатели переменного тока являются устройствами с постоянной скоростью, но их скорость может изменяться, если вы изменяете входное напряжение или частоту или обмотки, которые делают двигатель поворот. Наиболее распространенным и эффективным способом изменения скорости является изменение частоты с использованием инвертора в качестве источника питания. Этот метод стал популярным с развитием и снижением стоимости силовой электроники.Методы, включающие снижение напряжения на обмотках двигателя с помощью резисторов, трансформаторов или отводов обмоток двигателя, все еще используются и представляют собой недорогие и предпочтительные методы для определенных четко определенных применений.
Используйте инвертор для питания двигателя переменного тока. Выберите инвертор, который может подавать напряжение и ток двигателя, включая пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, который должен обеспечивать инвертор. Органы управления инвертором будут изменять частоту, подаваемую на двигатель, и скорость двигателя будет меняться соответственно.
Добавьте переменное сопротивление в цепь двигателя, чтобы уменьшить напряжение на главной обмотке, если инвертор слишком дорог и точное управление скоростью не требуется. «Скольжение» двигателя, обычно близкое к нулю, будет увеличиваться по мере того, как к двигателю будет подаваться пониженная мощность, а полюса двигателя не получают достаточно мощности для создания силы, необходимой для поддержания их нормальной скорости. Двигатель должен быть рассчитан на высокое скольжение, а сопротивление и схема должны соответствовать конкретному применению.
Используйте трансформатор переменного напряжения для изменения напряжения, подаваемого на основную обмотку, если вы хотите более эффективное управление скоростью с пониженным скольжением и пониженным напряжением, что более эффективно. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Трансформатор может иметь ряд отводов, которые yolu может изменять вручную для управления скоростью двигателя, или он может иметь моторизованный переключатель. В любом случае скорость двигателя изменяется с дискретным приращением, и детальный дизайн снова зависит от установки, где он используется.
Используйте двигатель переменного тока с резьбовыми обмотками, чтобы изменить скорость, если она доступна. Такой двигатель имеет определенное количество отводов на своей основной обмотке, которые позволяют ему работать с различными напряжениями, приложенными к его магнитному полю. Количество отводов и число скоростей, доступных для конкретного двигателя, обычно не более четырех. Этот метод распространен в вентиляторах, которые имеют низкие, средние и высокие скорости с переключателем выбора. Точная скорость в этих устройствах не важна, а метод контроля скорости — низкая стоимость.
Почему управление скоростью двигателя?
Часто желательно, чтобы управлял скоростью двигателя , обычно по причинам управления процессом для таких переменных, как расход или давление. Такие приложения, как вентиляторы и насосы, часто имеют различные требования к производительности, и управление скоростью двигателя более эффективно, чем механическое ограничение производительности процесса с помощью таких устройств, как дроссельные клапаны или демпферы.
 Сравнение методов контроля скорости двигателя (фото любезно предоставлено emersonindustrial.ком)
Сравнение методов контроля скорости двигателя (фото любезно предоставлено emersonindustrial.ком)Причина этого заключается в том, что для процессов на центробежной основе (таких как вентиляторы и центробежные насосы) существуют следующие отношения:
Крутящий момент = об / мин 2
Мощность = об / мин 3
Итак, для этих типов процессов крутящий момент, необходимый для их поворота, пропорционален квадрату скорости.
Но мощность, необходимая для их поворота, пропорциональна кубу скорости , и это то, что делает управление скоростью двигателя экономически привлекательным.В продолжение этого аргумента рассмотрим потерю энергии, когда используются механические средства, такие как дроссельные клапаны или демпферы, для управления процессом, который приводится в действие от двигателя, работающего на полной скорости.
Понятно, что управление скоростью двигателя можно использовать для экономии энергии за счет уменьшения потерь энергии, используемой для механического управления процессом .
Приводы с регулируемой скоростью (ASD)
Наиболее распространенным методом управления двигателем переменного тока является использование приводов с регулируемой скоростью.В большинстве коммерческих и промышленных сред они вытесняют практически любой другой метод управления скоростью двигателя.
Привод с регулируемой скоростью работает по принципу изменения частоты для изменения скорости двигателя . Напомним, что из приведенных выше уравнений синхронная скорость двигателя является функцией как частоты системы, так и числа полюсов двигателя. Изменяя частоту, скорость двигателя может изменяться, если двигатель оборудован для отвода тепла при пониженных скоростях.
В отличие от плавного пуска, предпочтительны специализированные конструкции двигателей с определенным назначением для инверторов, поскольку работа на пониженной скорости может вызвать тепловых проблем, а работа на превышении скорости может привести к проблемам безопасности.
Кроме того, выходы привода с широтно-импульсной модуляцией (ШИМ) могут вызывать повторяющиеся выбросы напряжения, называемые звонком, что может снизить ожидаемый срок службы двигателя общего назначения. Перед применением двигателя общего назначения в приводах с регулируемой скоростью следует проконсультироваться с изготовителем двигателя.
Таблица 1- Краткое изложение методов запуска двигателя
| Метод | Преимущества | Недостатки |
| по всей линии | Простой, экономичный | Высокий ток броска Высокий пусковой момент Резкий старт |
| Автотрансформатор пониженного напряжения | Высокий выходной крутящий момент по сравнению с пусковым током. Некоторая гибкость в стартовых характеристиках благодаря регулируемым отводам на автотрансформаторах | Ограниченный рабочий цикл Большой размер оборудования благодаря автотрансформаторам |
| Резистор или реактор пониженного напряжения | Высокий выходной крутящий момент противпусковой ток | Ограниченный рабочий цикл Ограниченная гибкость в пусковых характеристиках Более высокий пусковой ток по сравнению с автотрансформатором пониженного напряжения Большой размер оборудования из-за резисторов / реакторов |
| Wye-Delta | Относительно низкий пусковой ток Относительно простая конструкция стартера Подходит для длительного ускорения | Относительно низкий выходной крутящий момент по сравнению с пусковым током Ограниченная гибкость в пусковых характеристиках Требуется специальная конструкция двигателя |
| Part-Winding | Относительно простая конструкция стартера | Относительно низкий выходной крутящий момент по сравнению спусковой ток Не подходит для частых пусков Требуется специальная конструкция двигателя |
| Твердотельное устройство плавного пуска | Плавное ускорение Низкий пусковой ток Высокая гибкость в пусковых характеристиках Как правило, также предлагает управление замедлением Как правило, интегрируется с промышленной автоматизацией Инфраструктура | Относительно дорогой Чувствительность к качеству электроэнергии Рассеяние тепла и температура окружающей среды являются проблемой |
| Сопротивление ротора | Доступно плавное ускорение Хорошая гибкость в стартовых характеристиках Может использоваться и для управления скоростью | Сложная конструкция контроллера Требуется дорогая конструкция двигателя с винтовым ротором |
| Регулируемая скорость Скорость | Плавное ускорение Низкий пусковой ток Высокая гибкость в пусковых характеристиках Обеспечивает также замедление и управление скоростью Как правило, интегрируется с промышленной автоматизацией Инфраструктура | Недопустимая стоимость, кроме случаев, когда требуется контроль скорости Чувствительность к качеству электроэнергии Рассеяние тепла и температура окружающей среды являются проблемой Непрерывные гармонические токи могут создавать проблемы качества электроэнергии |
Существуют различные конструкции для приводов с регулируемой скоростью, однако для низковольтных приводов наиболее распространенной является конструкция с широтно-импульсной модуляцией источника напряжения.Как следует из названия, выход имеет широтно-импульсную модуляцию для уменьшения выходной гармоники и содержания шума.
В качестве источника переменного тока для привода обычно используется диодный выпрямитель . Упрощенная топология схемы для ШИМ-привода с источником напряжения приведена на рисунке 1 ниже.
 Рисунок 1. Привод с регулируемой скоростью ШИМ-источника напряжения: упрощенная топология схемы для реализации низкого напряжения
Рисунок 1. Привод с регулируемой скоростью ШИМ-источника напряжения: упрощенная топология схемы для реализации низкого напряженияВыходной каскад для схемы на рисунке 1 состоит из биполярных транзисторов с изолированным затвором ( IGBT ), которые обычно используются в низковольтных ШИМ-приводах с регулируемой скоростью вместо SCR из-за их высокой скорости переключения.
Приводы с регулируемой скоростью обеспечивают превосходное управление скоростью для двигателей с по 10000 л.с. , в зависимости от напряжения системы. Как правило, они также включают в себя защиту двигателя, что позволяет при желании исключать отдельные защитные реле двигателя.Из-за задействованных высоких частот переключения и их взаимодействия с емкостью кабеля длина кабеля между выходом привода и двигателем ограничена, и, как уже упоминалось выше для устройств плавного пуска, конденсаторы для коррекции коэффициента мощности и импульсные помехи Конденсаторы не должны использоваться на выходе привода с регулируемой скоростью.
Кроме того, из-за высоких частот переключения, при использовании этих приводов может возникнуть проблема синфазного шума на заземляющих проводниках .
 Привод с регулируемой частотой вращения переменного тока и комплект двигателя IE2 — 1,5 кВт (2,0 л.с.), 230 В, одна фаза (фото предоставлено: inverterdrive.com)
Привод с регулируемой частотой вращения переменного тока и комплект двигателя IE2 — 1,5 кВт (2,0 л.с.), 230 В, одна фаза (фото предоставлено: inverterdrive.com)На входящей линии приводы с регулируемой скоростью создают гармоники, которые необходимо учитывать при проектировании всей системы. Эта тема рассматривается в следующем разделе данного руководства.Приводы с регулируемой скоростью, такие как устройства плавного пуска, представляют собой микропроцессорные устройства. Следовательно, они могут взаимодействовать с инфраструктурой автоматизации объекта.
За исключением нескольких отдельных случаев, для большинства промышленных и коммерческих объектов приводы с регулируемой скоростью являются предпочтительным регулятором скорости для двигателей переменного тока.
Старые методы //
Существуют и другие методы контроля скорости двигателя переменного тока. Вот некоторые из них:
- Управление скоростью вращения ротора — аналогично пуску с сопротивлением ротора, этот метод состоит в изменении эффективного сопротивления ротора асинхронного двигателя с намотанным ротором для изменения скорости.Варианты этого способа включают системы восстановления мощности ротора, использующие вторую машину или вспомогательный твердотельный выпрямитель и преобразователь.
- Многоскоростной двигатель — Этот тип двигателя обычно представляет собой короткозамкнутый двигатель, имеющий до четырех фиксированных скоростей.
- Первичная регулировка напряжения с использованием насыщаемых реакторов — Этот метод применим только к двигателям NEMA Design D и предлагает очень узкий диапазон регулирования скорости.
Из-за ограничений этих методов и того факта, что они не подходят для широкого спектра двигателей, привод с регулируемой скоростью обычно является предпочтительным решением для большинства коммерческих и промышленных объектов.
Ссылка // Двигатели переменного тока, управление двигателем и защита двигателя — Билл Браун, P.E., Square D Engineering Services
,Подогрев двигателя
Существует много причин, по которым электродвигатель может начать нагреваться. Например, когда используется другой режим запуска, отличный от указанного на заводской табличке двигателя, это может привести к перегреву двигателя и последующему повреждению двигателя.
 Практические советы о том, как не перегореть электродвигатель
Практические советы о том, как не перегореть электродвигательИз-за высоких пусковых токов в асинхронных электродвигателях время, необходимое для ускорения высокоинерционных нагрузок, приведет к внезапному повышению температуры двигателя.Если интервал между последовательными запусками очень короткий, обмотки двигателя могут перегреться, что приведет к некоторому повреждению или сокращению срока их службы.
На температуру обмотки двигателя влияет тепло, поступающее от различных источников. Эти источники могут быть внутренними по отношению к двигателю в результате его работы, или они могут быть внешними по отношению к двигателю в результате его окружающей среды. На температуру также влияет способность двигателя рассеивать это тепло.
Давайте обсудим наиболее важные темы, связанные с нагревом асинхронного двигателя:
- Нагрев обмотки
- Потери
- Тепловыделение
- Температура наружной поверхности двигателя
- Срок службы мотора
- Классы изоляции
- Измерение повышения температуры обмотки
- Применение электродвигателя, приводящее к перегреву
- General
- Вариации нагрузки двигателя
- Повторяющиеся запуска и остановки
- Инерция нагрузки
- Колебания напряжения и частоты
- Работа с преобразователями частоты
- Недостаточная высота
- Плохая вентиляция
- Нагрев обмотки
1.Нагрев обмотки
1,1 потери
Эффективная или полезная выходная мощность, подаваемая двигателем на конце вала, ниже, чем мощность, потребляемая двигателем от источника питания, т.е. эффективность двигателя всегда ниже 100%.
Разница между входом и выходом представляет потерь, которые преобразуются в тепло . Это тепло нагревает обмотки и поэтому должно быть снято с двигателя, чтобы избежать чрезмерного повышения температуры.
Этот отвод тепла должен быть обеспечен для всех типов двигателей.
В автомобильном двигателе, например, в двигателях с воздушным охлаждением тепло, выделяемое внутренними потерями, должно быть удалено из блока двигателя потоком воды через радиатор или вентилятор.
Вернуться к содержанию ↑
1,2 Теплоотдача
Тепло, создаваемое внутренними потерями, рассеивается в окружающем воздухе через внешнюю поверхность рамы. В полностью закрытых двигателях этому рассеиванию обычно способствует вентилятор, установленный на валу.
Хорошее тепловыделение зависит от:
- КПД вентиляционной системы
- Общая площадь рассеяния тепла рамы
- Разница температур между внешней поверхностью рамы и окружающим воздухом (т экст. — т а )
Рекомендации
Действие № 1 — Хорошо спроектированная система вентиляции, а также эффективный вентилятор, способный пропускать большой объем воздуха, должны направлять этот воздух по всей окружности рамы для достижения необходимого теплообмена.
Большой объем воздуха абсолютно бесполезен, если ему позволено распространяться, не отводя тепло от двигателя .
Действие № 2 — Площадь рассеяния должна быть максимально большой. Однако двигатель с очень большой рамой требует очень большой площади охлаждения и, следовательно, становится слишком дорогим, слишком тяжелым и требует слишком много места для установки.
Для получения максимально возможной площади при одновременном минимальном размере и весе (экономическое требование) вокруг рамы установлены охлаждающие вентиляторы .
Действие № 3 — Эффективная система охлаждения — это система, которая способна рассеивать максимально возможное количество тепла через наименьшую площадь рассеяния.
Следовательно, необходимо, чтобы внутреннее падение температуры, показанное на рисунке 7.1, было минимизировано. Это означает, что хороший теплообмен должен происходить изнутри на внешнюю поверхность двигателя.
Как объяснено, цель состоит в том, чтобы уменьшить внутреннее падение температуры (т.е.улучшить теплопередачу), чтобы получить максимально возможное падение температуры наружного воздуха, необходимое для хорошего отвода тепла.
Внутреннее падение температуры зависит от различных факторов, которые указаны на рисунке 1, где температуры определенных важных областей показаны и объяснены следующим образом:
 Рисунок 1 — Внутреннее падение температуры зависит от различных факторов
Рисунок 1 — Внутреннее падение температуры зависит от различных факторовГде:
A — Самая горячая точка намотки находится в центре пазов, где выделяется тепло в результате потерь в проводниках.
AB — Падение температуры происходит из-за теплопередачи от самой горячей точки к внешним проводам . Поскольку воздух является очень плохим проводником тепла, очень важно предотвращать пустоты внутри пазов, то есть обмотки должны быть компактными и идеально пропитанными лаком.
B — Падение температуры через изоляцию прорези, контакт изоляционного материала с проводниками и контакт с сердечниками.
Благодаря использованию современных материалов теплоизоляция значительно улучшает теплопередачу.Идеальная пропитка улучшает контакт с внутренней стороной, устраняя пустоты. Идеальное выравнивание слоистых материалов улучшает контакт с внешней стороной, устраняя слои воздуха, которые негативно влияют на теплообмен.
г. до н.э. — Падение температуры при прохождении через статор материала ламинирования
C — Понижение температуры при контакте между сердечником статора и рамой. Теплопередача зависит от идеального контакта между деталями, хорошего выравнивания расслоений и точности обработки рамы.
Неровные поверхности оставляют пустые места, что приводит к плохому контакту и, следовательно, к плохой теплопередаче .
CD — Понижение температуры при передаче по толщине рамы.
Благодаря современному дизайну, использованию первоклассного материала, улучшенным производственным процессам и постоянному контролю качества, электродвигатели ДОЛЖНЫ обеспечивать отличные свойства теплопередачи от двигателя внутрь к наружу, таким образом устраняя «горячие точки» в обмотках .
Вернуться к содержанию ↑
1,3 Температура наружной поверхности двигателя
На рисунке ниже показаны рекомендуемые места, где температуру внешней поверхности электродвигателя следует проверять с помощью калиброванных приборов для измерения температуры:
 Рисунок 2 — Рекомендуемые места, где следует проверять температуру внешней поверхности электродвигателя
Рисунок 2 — Рекомендуемые места, где следует проверять температуру внешней поверхности электродвигателяВажно! Измерьте также температуру окружающей среды (при макс.расстояние 1 м ( от мотора).
Вернуться к содержанию ↑
2. Срок службы мотора
Как вы уже знаете, полезный срок службы двигателя зависит почти исключительно от срока службы изоляции обмотки .
Срок службы двигателя зависит от многих факторов, таких как влажность, вибрация, агрессивные среды и другие. Среди всех этих факторов наиболее важным является рабочая температура используемых изоляционных материалов.
Вы должны знать, что при увеличении на 8-10 градусов выше номинального температурного класса системы изоляции может сократить срок службы двигателя вдвое.
Говоря об уменьшении полезного срока службы двигателя, мы не говорим о высоких температурах, когда система изоляции горит, а обмотка внезапно разрушается. Для срока службы изоляции это означает постепенное старение изоляционного материала, который становится сухим, теряя свои изоляционные свойства до тех пор, пока не сможет выдержать приложенное напряжение.
Это приводит к выходу из строя системы изоляции и последующему короткому замыканию обмоток.
Опыт показывает, что изоляционная система имеет практически неограниченный срок службы, если температура поддерживается ниже определенного предела, если этот предел температуры превышен, срок службы изоляции будет сокращаться при повышении температуры.
Этот температурный предел значительно ниже температуры «горения» системы изоляции и зависит от типа используемого изоляционного материала.
Этот предел температуры относится к самой горячей точке в системе изоляции, но не обязательно ко всей обмотке. Одного слабого места во внутренней части обмоток будет достаточно для разрушения системы изоляции.
Рекомендуется использовать датчики температуры в качестве дополнительных защитных устройств для электродвигателя. Эти защитные устройства обеспечат более длительный срок службы и большую надежность процесса.
Настройка сигнализации и / или отключения должна выполняться в соответствии с температурным классом двигателя.
Вернуться к содержанию ↑
3. Классы изоляции
Определение класса изоляции
Как уже упоминалось ранее, предел температуры зависит от типа используемого материала. Чтобы соответствовать стандартам, изоляционный материал и системы изоляции (каждая из которых образована комбинацией нескольких материалов) сгруппированы в ИЗОЛЯЦИОННЫЕ КЛАССЫ .
Каждый из них определяется конкретным пределом температуры , т.е.е. самой высокой температурой, которую изоляционный материал или система могут выдерживать непрерывно, не влияя на срок его службы.
Классы изоляции, используемые для электрических машин, и соответствующие им пределы температуры соответствуют МЭК 60034-1 :
- Класс A (105 ºC)
- Класс E (120 ºC)
- Класс B (130 ºC)
- Класс F (155 ºC)
- Класс H (180 ºC)
Вернуться к содержанию ↑
4.Измерение повышения температуры обмотки
Было бы довольно трудно измерить температуру обмотки с помощью термометров или термопар, так как температура отличается от одного места к другому, и невозможно узнать, находится ли точка измерения рядом с самым горячим местом.
Наиболее точный и надежный метод определения температуры обмотки — это путем измерения и изменения сопротивления обмотки как функции температуры .
Измерение повышения температуры методом сопротивления для медных проводников рассчитывается по следующей формуле:

где:
- Δt — повышение температуры;
- т 1 — температура обмотки перед испытанием, которая должна быть практически равна охлаждающей среде, измеренная термометром;
- т 2 — температура обмотки по окончании испытания;
- т, , а , — температура охлаждающей среды при завершении испытаний;
- R 1 — сопротивление обмотки до испытания;
- R 2 — сопротивление обмотки в конце испытания.
Вернуться к содержанию ↑
5. Применение электродвигателя
5.1 Общая информация
Температура самой горячей точки в обмотке должна поддерживаться ниже максимально допустимой температуры для класса изоляции. Общая температура представляет собой сумму температуры окружающей среды, плюс повышение температуры (∆t) плюс разница, существующая между средней температурой обмотки и самой горячей точкой.
Стандарты двигателяопределяют максимальное повышение температуры ∆t , поэтому температура самой горячей точки остается в допустимых пределах, исходя из следующих соображений:
- Температура окружающей среды не должна превышать 40 ºC , в соответствии со стандартом.Выше этого значения условия труда рассматриваются как особые условия эксплуатации.
- Разница между средней температурой обмотки и самой горячей точкой не сильно отличается от двигателя к двигателю, и ее значение, указанное в стандарте, составляет 5 ºC для классов A и E, 10 ºC для классов B и F и 15 ºC для класса H .
Поэтому в стандартах на двигатели указана максимальная допустимая температура окружающей среды , равная , а также максимально допустимое повышение температуры для каждого класса изоляции.Таким образом, температура самой горячей точки косвенно ограничена.
Цифры и допустимый температурный состав для самой горячей точки показаны в таблице 1 ниже:
Таблица 1 — Температурный состав как функция класса изоляции
| Класс изоляции | A | E | B | F | H | |
| Температура окружающей среды | ° C | 40 | 40 | 40 | 40 | 40 |
| ∆t = повышение температуры (метод сопротивления) | ° C | 60 | 75 | 80 | 105 | 125 |
| Разница между самой горячей точкой и средней температурой. | ° C | 5 | 5 | 10 | 10 | 15 |
| Итого: температура самой горячей точки | ° C | 105 | 120 | 130 | 155 | 180 |
Вернуться к содержанию ↑
5,2 вариации нагрузки двигателя
Двигатель, работающий с номинальной нагрузкой или выше, будет генерировать больше тепла и будет иметь более высокий рост температуры, чем двигатель, работающий на меньшей мощности, чем указанная в паспортной мощности.
См. Таблицу 2 с типичными рабочими данными для приложения, требующего непрерывной работы 1150 л.с., при установке двигателя мощностью 1000 л.с. с коэффициентом сервисного обслуживания 1,15 изначально может быть на 11% меньше, чем при установке машины с коэффициентом обслуживания 1,050 1250 л.с.
Таблица 2 — Повышение температуры и КПД 1250 л.с. против вариаций двигателя 1000 л.с.
| Номинальная HP | % из Номинальная Нагрузка | Фактический HP | Темп. Повышение ** (° C) | Мотор КПД | Относительно Изоляция Жизнь | Относительно Стоимость |
| 1000 | 115 | 1150 | 90,0 | 94,2 | 1,0 | 1,00 |
| 1000 | 100 | 1000 | 71.0 | 94,6 | 3,8 | |
| 1000 | 75 | 750 | 47,8 | 94,9 | 19,5 | |
| 1000 | 50 | 500 | 32,7 | 94,4 | > 20 | |
| 1250 | 100 | 1250 | 80,0 | 94,8 | 2,0 | 1,11 |
| 1250 | 92 | 1150 | 70.3 | 95,0 | 3,9 | |
| 1250 | 80 | 1000 | 56,6 | 95,2 | 10,7 | |
| 1250 | 60 | 750 | 42,0 | 94,8 | > 20 | |
| 1250 | 50 | 625 | 36,6 | 94,7 | > 20 |
** Повышение температуры на сопротивление
Тем не менее, больший двигатель будет иметь 3.В 9 раз больше ожидаемого срока службы изоляции и на 0,8% (95,0 — 94,2) большей эффективности , что, вероятно, приведет к снижению стоимости жизненного цикла.
Обратите внимание, что для непрерывной работы при 1000 л.с. двигатель большего размера будет иметь примерно в 2,8 раза больше ожидаемого срока службы (10,7, деленного на 3,8) и КПД на 0,6% (на 95,2 меньше, чем на 94,6).
Для большинства конструкций асинхронных двигателей характерно, что КПД нагрузки выше, чем КПД при полной нагрузке. И наоборот, эффективность на 1.15 Сервисный коэффициент обычно ниже, чем при номинальной нагрузке.
Вернуться к содержанию ↑
5,3 повторяющихся запусков и остановок
Когда двигатель запускается под нагрузкой , он обычно потребляет ток, в шесть-семь раз превышающий нормальный, при ускорении нагрузки . Это приводит к высоким краткосрочным потерям меди и накоплению тепла.
Если затем двигатель останавливается и затем перезапускается до того, как он успел остыть, ситуация усугубляется.
Повторяющиеся пуски и остановки в течение короткого промежутка времени всегда будут оказывать вредное влияние на срок службы обмотки двигателя. — особенности будут зависеть от частоты пусков и остановок, характера нагрузки.
Вернуться к содержанию ↑
5,4 Инерция нагрузки
NEMA определяет стандартные значения инерции для каждого номинального двигателя. Запуск нагрузок с большей инерцией вызовет дополнительное накопление тепла во время ускорения, что может повлиять на срок службы изоляции.
Такие применения должны быть проверены у производителя двигателя , чтобы убедиться в правильности конструкции для конкретного применения .
Вернуться к содержанию ↑
5.5 Колебания напряжения и частоты
Колебания напряжения или частоты системы могут вызвать дополнительное нагревание и привести к преждевременному выходу из строя обмотки.
NEMA указывает, что двигатели подходят для следующих вариантов:
- ± 10% напряжения при номинальной частоте Частота
- ± 5% при номинальном напряжении
- максимум 10% (абсолютные значения) в сочетании с 5% пределом по частоте.
Изменения за пределами этих пределов могут привести к повреждению обмоток двигателя в зависимости от конструкции двигателя .Двигатель с высокой плотностью потока будет более подвержен влиянию условий перенапряжения, поскольку потери в сердечнике возрастут.
Двигатели с более низкой плотностью потока будут в большей степени зависеть от увеличения тока в условиях напряжения.
Чрезмерная частота может привести к перегрузкам двигателей, приводящих в движение центробежные машины; тогда как недостаточная частота может привести к повреждению из-за неэффективного охлаждения двигателей, приводящих в действие постоянные крутящие нагрузки.
Аналогичным образом, дисбаланс более 1% в фазовых напряжениях вызовет токов обратной последовательности, что может привести к перегреву ротора наряду с увеличением температуры обмотки двигателя, уровнями шума и вибрации .
Вернуться к содержанию ↑
5.6 Работа с преобразователями частоты
Работа с приводом с регулируемой скоростью часто приводит к появлению гармоник в двигателе, что может привести к перегреву и локализованным горячим точкам. Гармоники из «грязной» системы питания, даже если сам двигатель не используется с приводом, могут иметь тот же эффект.
По этой причине двигатели , используемые на приводах с регулируемой скоростью, обычно не имеют коэффициента обслуживания больше 1.0
Обычно указываются такие двигатели: «Повышение на 90 ° с помощью RTD при номинальной нагрузке (1,0 SF) на синусоидальной частоте 60 Гц, пригодное для повышения класса F при использовании на преобразователе».
При отсутствии сервисного коэффициента требуется дополнительный коэффициент безопасности 25 °, чтобы компенсировать нагрев от гармоник и снижение вентиляции на более низких скоростях. Следовательно, двигатель, используемый на приводе с номинальной нагрузкой, обычно будет работать горячее, чем его неиспользующий аналог , и будет иметь меньший ожидаемый срок службы изоляции .
Моторы, специально разработанные для использования с приводами, могут быть компенсированы за счет использования воздуходувок, рам большого размера и / или специальных материалов.
Вернуться к содержанию ↑
5,7 Недостаточная высота над уровнем моря
Двигатели, работающие на высоте более 3300 футов, будут подвержены повышенным температурам на градусов выше, чем двигателям на уровне моря , поскольку окружающий воздух менее плотный и, следовательно, будет рассеивать меньше тепла.
Рекомендуется использовать следующие коэффициенты снижения номинальной мощности, указанные на паспортной табличке, при работе двигателя на больших высотах:
- 3% между 3300 и 5000 футами
- 6% между 5000 и 6600 футами
- 10% между 6600 и 8300 футами
- 14% между 8300 и 9900 футами
Вернуться к содержанию ↑
5.8 Плохая вентиляция
Двигатели, которые работают в нечистых или очень ограниченных условиях , которые препятствуют надлежащей вентиляции двигателя , будут подвергаться перегреву и сокращению срока службы.
Вернуться к содержанию ↑
Список литературы //
- Спецификация электродвигателей по WEG
- Срок службы двигателя: влияние нагрузки, фактора эксплуатации и повышения температуры на срок службы изоляции. Автор Брюс Кэмпбелл и Хосе Галлено