Регулировка оборотов двигателя от стиральной машины
Регулировка оборотов двигателя стиральной машины может потребоваться любому домашнему самоделкину, который решит приспособить деталь отслужившей помощницы.
Простое подключение двигателя стиральной машины к питанию не дает много проку, поскольку он выдает сразу максимальные обороты, а ведь многие самодельные приборы требуют увеличения или уменьшения оборотов, причем желательно без потери мощности. В этой публикации мы и поговорим о том, как подключить двигатель от стиралки, и как сделать для него регулятор оборотов.
Сначала подключим
Прежде чем регулировать обороты двигателя стиральной машины, его нужно правильно подключить. Коллекторные двигатели от стиральных машин автомат имеют несколько выходов и многие начинающие самоделкины путают их, не могут понять, как осуществить подключение. Расскажем обо всем по порядку, а заодно и проверим работу электродвигателя, ведь существует же вероятность, что он вовсе неисправен.
- Для начала нужно взять двигатель от стиральной машины, покрутить его и найти катушки возбуждения или башмаки, от которых должно идти 2, 3 и более проводов. Башмаки выглядят примерно так, как показано на рисунке ниже.
- Берем омметр, выставляем тумблер на минимальное сопротивление и начинаем поочередно звонить все выходы. Наша задача выбрать из всех выходов катушки возбуждения 2, у которых значение сопротивления больше всех, если их всего два, то ничего выбирать не нужно.
- Далее нужно найти коллектор двигателя и щетки, от которых также будут идти 2 провода. В данном случае выхода будет только два, если их больше, значит, вы что-то перепутали или один из проводов банально оторван.
- Следующая группа выходов, которые нам позарез нужно обнаружить – это выходы таходатчика. В ряде случаев провода, идущие от таходатчика, можно заметить прямо на корпусе двигателя, но иногда их прячут в недра корпуса и тогда, чтобы подключиться, приходится частично разбирать двигатель.

К сведению! Таходатчики, имеющие два выхода, легко прозваниваются омметром. А вот аналогичные детали с тремя выходами не звонятся ни по одному направлению.
- Далее берем один провод, идущий от коллектора, и соединяем с одним из проводов катушки.
- Второй провод коллектора и второй провод катушки подключаем к сети 220 В.
- Если нам нужно поменять направление вращения якоря, то мы просто меняем местами подключаемые провода, а именно первый провод коллектора и первый провод катушки включаем в сеть, а вторые провода соединяем между собой.
- Отмечаем ярлычками провода катушки, таходатчика и коллектора, чтобы не перепутать и производим пробный пуск двигателя.
Если пробный запуск прошел успешно, а именно, двигатель плавно набрал обороты без заеданий и рывков, щетки не искрили, можно приступать к подключению двигателя стиральной машины через регулятор оборотов. Существует множество схем подключения двигателя через регулятор, как и схем самого регулятора, рассмотрим два варианта.
Подключим через регулятор напряжения
Простейший вариант регулировки электродвигателя стиральной машины – использование любого регулятора напряжения (диммера, гашетки от дрели и прочего). Смысл регулировки в том, что на двигатель подается сначала максимальное напряжение, и он вращается с максимальной скоростью. Поворачивая тумблер диммера, мы уменьшаем напряжение, и двигатель соответственно начинает снижать обороты. Схема подключения следующая:
- один провод катушки соединяем с одним проводом якоря;
- второй провод катушки подключаем к сети;
- второй провод якоря соединяем с диммером, а второй выход диммера подключаем к сети;
- производим пробный пуск двигателя.
Проверяем, как работает двигатель на минимальной мощности. Вы можете убедиться, что даже на минимальной мощности обороты без нагрузки внушительны, но стоит только прислонить деревянный брусочек к вращающейся оси, и двигатель тут же останавливается.
Важно! При запуске двигателя стиральной машины соблюдайте технику безопасности. Обязательно закрепите двигатель перед пуском, кроме того не стоит прикасаться руками к вращающимся элементам.
Изначально мы ставили задачу научиться своими руками регулировать обороты двигателя стиральной машины без потери или с минимальной потерей мощности, но возможно ли это? Вполне возможно, просто схема подключения несколько усложнится.
Через микросхему
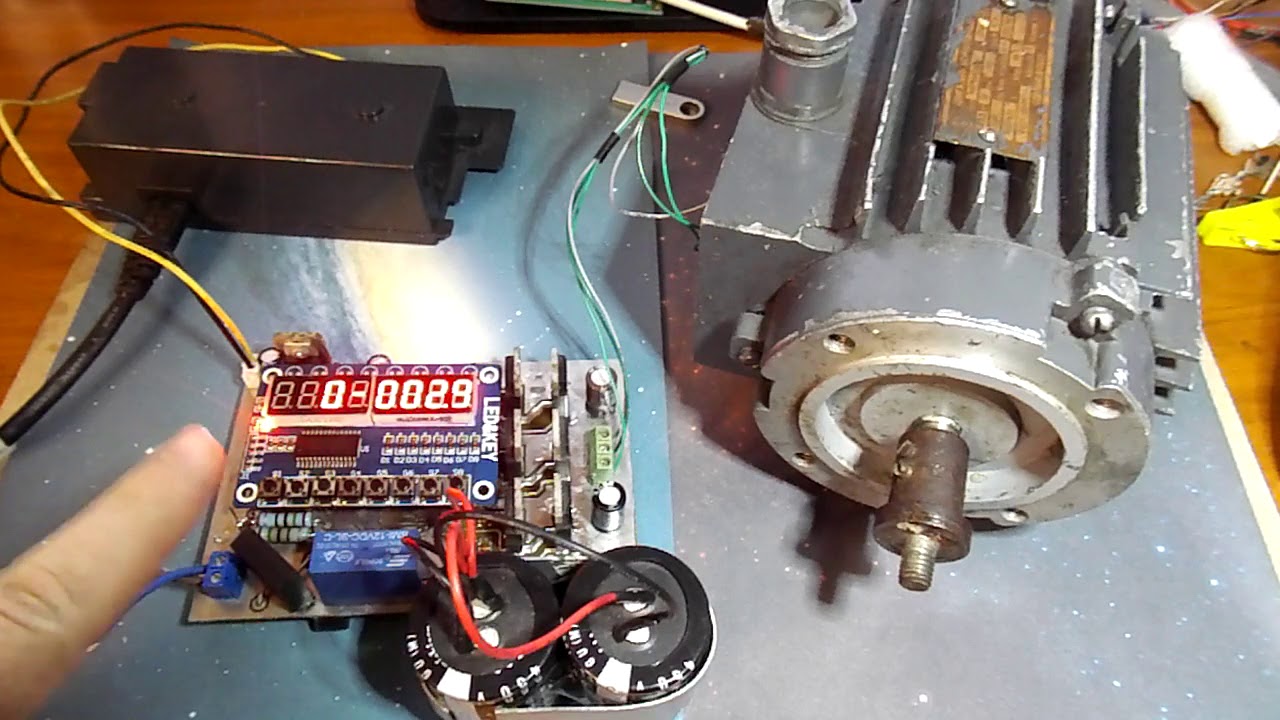
Пришло время вспомнить про таходатчик и его выходы, которые мы на двигателе нашли, но до поры отставили в сторону. Именно таходатчик поможет нам подключить двигатель стиралки и регулировать его обороты без потери мощности. Сам таходатчик управлять двигателем не может, он лишь посредник. Реальное управление должно осуществляться посредством микросхемы, которая соединяется с таходатчиком двигателя, обмоткой и якорем и запитывается от сети 220 В. Принципиальную схему вы можете видеть на рисунке ниже.
Что происходит с двигателем, когда мы подключаем его к сети через эту микросхему? А происходит следующее, мы можем запустить двигатель своими руками на максимальных оборотах, а можем, повернув специальный тумблер обороты уменьшить. Даем внезапную нагрузку двигателю, подставив под вращающийся шкив деревянный брусочек. На долю секунды обороты падают, но потом снова восстанавливаются, несмотря на нагрузку.
Дело в том, что таходатчик определяет понижение оборотов из-за возникшей нагрузки и сразу же подает сигнал об этом на управляющую плату. Микросхема, получив сигнал, автоматически добавляет мощность, выравнивая, таким образом, обороты двигателя. Мечта самоделкина, как говорится, сбылась. При наличии такой схемы подключения из двигателя стиральной машины можно сделать и зернодробилку и дровокол и много других полезных вещей.
Подводя итог нашего повествования, ответим еще на один резонный вопрос, который может возникнуть у читателя: где взять такую плату? Можно собрать на основе схемы и списка деталей, которые мы прилагаем к настоящей статье, а можно заказать в готовом виде у специалистов. Благо в сети предложений на этот счет достаточно. Искать нужно схему TDA 1085.
Регулирование скорости асинхронного двигателя
Вопрос, связанный с регуляцией скорости вращения электрического низковольтного двигателя , становится все более актуальным. Дело в том, что сокращение или увеличение числа оборотов, совершаемых оборудованием, важно для стабильной работы различных приборов, в частности, для механизмов, которые применяются для облегчения бытовых работ. На первый взгляд может показаться, что проще всего будет решить проблему за счет снижения напряжения, питающего двигатель. Однако, данный вариант подходит только для моделей постоянного тока. В них регуляторы напряжения отличаются лаконичностью конструкции. Кроме того, они вполне доступны. Тем не менее, в последнее время большая часть устройств, принимающих участие в производственном процессе, основываются на двигателях переменного тока асинхронного типа. В подобной ситуации в случае снижения напряжения двигатель начинает резко сокращать число оборотов, утрачивает мощность и тормозит.
Для регулирования скорости вращений существует более современный способ. Он предполагает применения частотных инвенторных преобразователей, которые в обиходе все чаще называются частотниками. Они нередко используются в различных сферах. Например, их часто применяют для оборудования станков и электрических приводов, входящих в состав промышленного оборудования.
Принцип функционирования частотника довольно прост. Его суть заключается в правиле определения вытяжной угловой скорости вращения вала. При этом важно учитывать такой немаловажный фактор, как частота сети, обеспечивающей питание. За счет изменения частоты питания появляется возможность регуляции скорости вращения ротора. Каждый частотный преобразователь снабжается специальной табличкой. На ней указываются основные характеристики.
Его суть заключается в правиле определения вытяжной угловой скорости вращения вала. При этом важно учитывать такой немаловажный фактор, как частота сети, обеспечивающей питание. За счет изменения частоты питания появляется возможность регуляции скорости вращения ротора. Каждый частотный преобразователь снабжается специальной табличкой. На ней указываются основные характеристики.
Регулятор оборотов электродвигателя — TDA1085
В себя включает:
- Плата в сборе — полностью готовая к эксплуатации.
- Резистор регулировки оборотов — в комплекте.
- Установленные клеммы — А (сеть 220 В), М (мотор), Т (таходатчик).
- Питание платы — на прямую от сети 220 вольт, 50 Гц.
- Мощность — до 3000 Вт. (стандартные двигатели от стиральных машин автомат).
- Применение — к коллекторным двигателям (двигателям с щетками).
- Габаритные размеры — длина 96 мм, ширина 96 мм, высота 32 мм.
- Система защиты — по току, предохранителем 5 А.
Дополнительные опции:
- Реверсный переключатель (on-off-on) с проводами и клеммами 16 А, 250 В.
- Измеритель числа оборотов — Тахометр (Отдельное устройство, блок питания ы комплект не входит).
- Реле времени — YYC-2 (Отдельное устройство, блок питания ы комплект не входит).
Для чего нужна эта плата: Данная плата позволяет регулировать обороты коллекторного электродвигателя (с щетками) без потери мощности независимо от нагрузки (в пределах заявленной производителем электродвигателя). С ее помощью вы сможете управлять оборотами электродвигателя от 200 до 20000 об/мин. При этом сохраняя полный момент силы на валу электродвигателя.
Для чего нужен реверсный переключатель: Это тумблер на три положения серии «KCD» с запасом мощности до 4000 Вт. , с установленными клеммами и проводами с нанесенной маркировкой к подключению. Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
, с установленными клеммами и проводами с нанесенной маркировкой к подключению. Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
Для чего нужен измеритель числа оборотов: Тахометр просто необходим если Вам нужно замерить обороты станка или вращающегося механизма. Блок питания в комплект не входит.
Для чего нужно реле времени: Таймер времени предназначен для автоматического отключения регулятора. Вы можете выбрать время на таймере и заниматься своими делами, а реле отключит регулятор оборотов через заданное время. Блок питания в комплект не входит.
Дополнительное описание: Монтажная плата изготавливается станочным производством, на заводе в России. Толщина основы текстолита 1,5 мм.Толщина медной фольги 0,35 мм, с нанесенной паяльной маской. Монтаж радиокомпонентов, осуществляется заводским конвейером. Установленные детали в выводном корпусе. Активные радиокомпоненты, закупаются от фирм оригинальных производителей: On semiconductor, ST microelectronics, с целью увеличения надежности и длительного срока эксплуатации.
Внимание! Данная плата применима, только для коллекторных двигателей (двигателей с щетками), с обязательным наличием таходатчика. Данная плата изготавливалась для двигателей от стиральных машин автомат, мощностью до 3000 Вт.
- Каждая плата пред отправкой заказчику проходит полную проверку под нагрузкой, на предмет отсутствия дефектов и брака!
- Предоставляется гарантия и послепродажная консультация!
- При оплате на р/с +7%
Различная комплектация
| КОМПЛЕКТАЦИЯ «КОНСТРУКТОР» В себя включает:
| КОМПЛЕКТАЦИЯ «ПЛАТА МОНТАЖНАЯ» В себя включает:
|
Как снизить обороты электродвигателя 220в
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
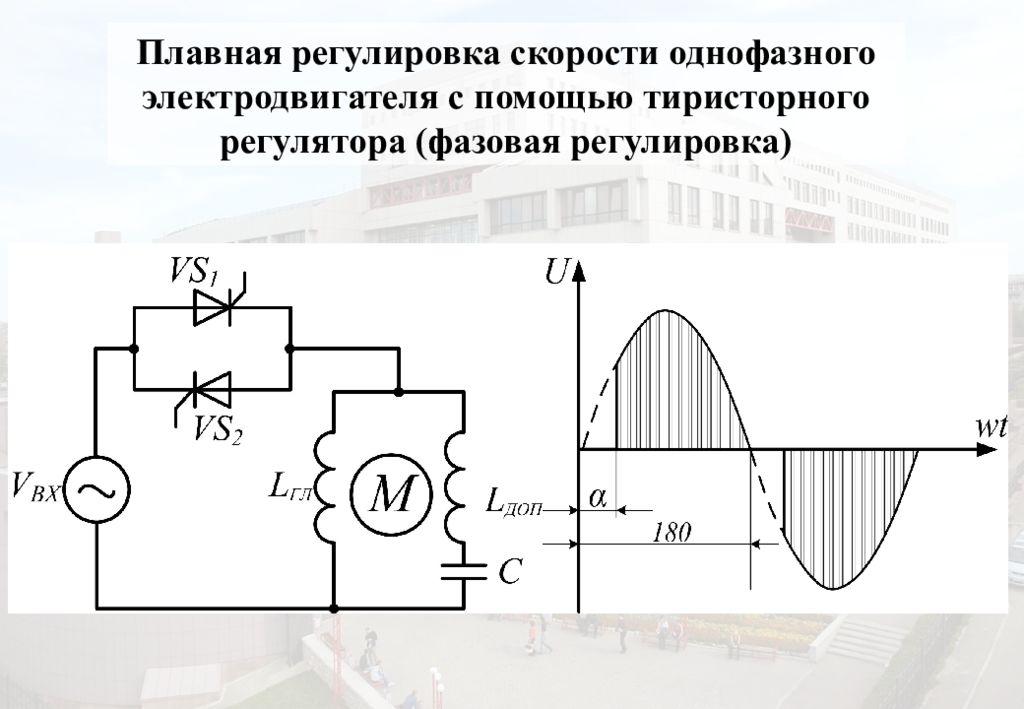
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.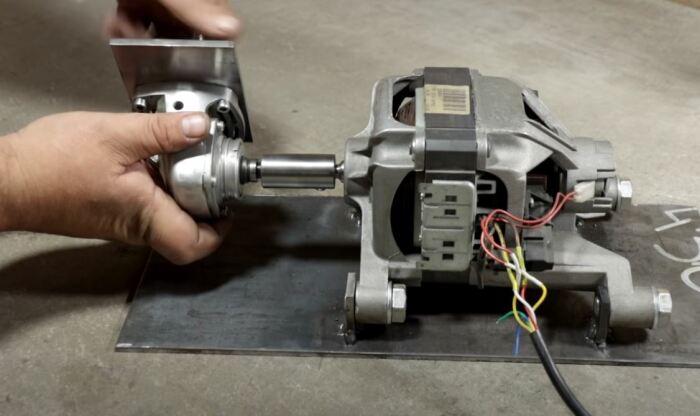
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора.
 Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным. - Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии.
 Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз. - Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными.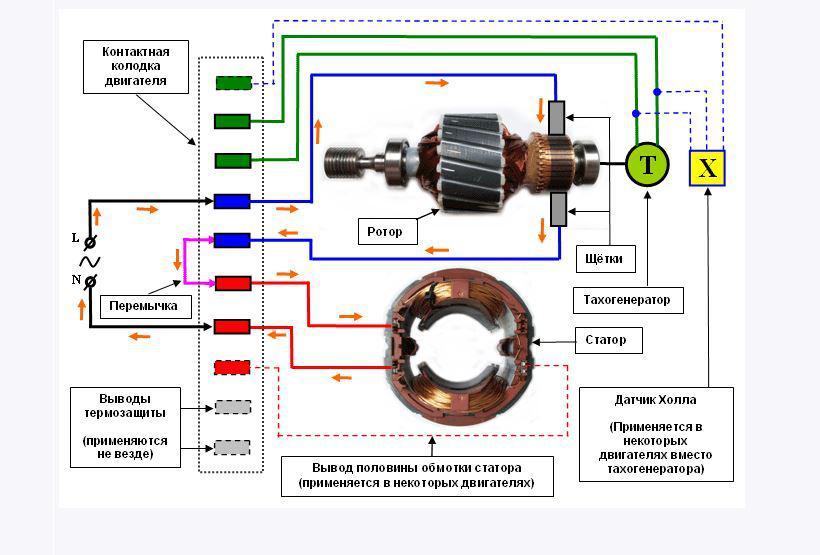 Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Рекомендованные сообщения
Создайте аккаунт или войдите в него для комментирования
Вы должны быть пользователем, чтобы оставить комментарий
Создать аккаунт
Зарегистрируйтесь для получения аккаунта. Это просто!
Войти
Уже зарегистрированы? Войдите здесь.
Сейчас на странице 0 пользователей
Нет пользователей, просматривающих эту страницу.
“>
Изменение скорости вращения электродвигателя при помощи кнопок — Статьи
Дата публикации: 06.12.2019
В данной статье будет рассмотренна настройка преобразователя частоты для изменения частоты вращения при помощи кнопок.
Для ввода преобразователя частоты Danfoss в эксплуатацию необходимо выполнить следующие действия:
- Выполнить монтаж с соблюдением норм безопасности!
- Проверить параметры оборудования (параметры сети, входа питание ПЧ, двигателя)
- Проверить условия установки и эксплуатации преобразователя частоты (отсутствие пыли и влаги, температурный режим и установочные зазоры).
- Электрический монтаж осуществить в соответствии с схемой подключения указанной на рисунке 1
Рисунок 1. Принципиальная электрическая схема подключения преобразователя частоты VLT Micro Drive
- Проверить правильность и надежность подключений
- Далее необходимо установить следующие параметры в преобразователе частоты VLT Micro Drive:
| пар. | Параметр | Требуется установить значение |
|---|---|---|
| 14-22 | Режим работы (сброс параметров на заводские) | [2] Initialisation — инициализация, после установки значения выключить и затем включить ПЧ (сбросится в 0). |
| 1-20* | Номинальная мощность | ## кВт — с шильдика (паспортной таблички двигателя) |
| 1-22* | Номинальное напряжение | ## В — с шильдика (паспортной таблички двигателя) |
| 1-23* | Номинальная частота | ## Гц — с шильдика (паспортной таблички двигателя) |
| 1-24* | Номинальный ток | ## А — с шильдика (паспортной таблички двигателя) |
| 1-25* | Номинальный скорость | ## Об/мин — с шильдика (паспортной таблички двигателя) |
| 1-29 | Автоматическая адаптация двигателя | [2] Enable AMT — Для запуска адаптации установите [2] на пульте «Hand on» по завершении — «Ok» Знач. сбросится [0] |
| 4-12* | Мин. скорость вращения | [0] Гц — в зависимости от применения (реком. для вентиляторов) |
| 4-14* | Макс. скорость вращения | [50] Гц — рекомендуется установить номинальную скорость |
| 3-41 | Время разгона | [3] с — зависит от применения |
| 3-42 | Время замедления | [3] с — зависит от применения |
| Проверьте правильность направления вращения механизма, в ручном режиме нажав на панели «Hand on» (далее потенциометром панели или стрелками), по окончании нажмите «Auto on»* | ||
| 3-15 | Источник задания 1 | [0] No function — нет |
| 3-16 | Источник задания 2 | [0] No function — нет |
| 5-10 | Функция цифр.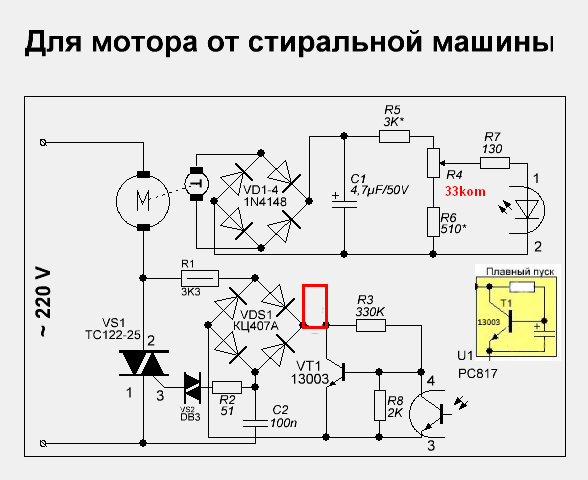 вх. 18 вх. 18 | [8] ПУСК тумблером |
| 5-12 | Функция цифр. вх. 27 | [19] Зафиксировать задание |
| 5-13 | Функция цифр. вх. 29 | [21] Увеличение скорости |
| 5-15 | Функция цифр. вх. 33 | [22] Уменьшение скорости |
Для заказа перейдите в каталог по ссылке — VLT Micro Drive
Cмотрите так же:
Поддержание постоянной температуры. Задание в цифровом виде
Реализация функции «Спящий режим» на встроенном контроллере SLC частотного преобразователя
Инструкция по настройке ModBus RTU
Задание фиксированных скоростей частотника Danfoss VLT Micro Drive FC-051
Как определить скорость вращения электродвигателя
Как обслуживать частотные преобразователи?
Для долгосрочной эксплуатации инвертора требуется контроль за его состоянием и выполнение предписаний :
- Очищать от пыли внутренние элементы. Можно использовать компрессор для удаления пыли сжатым воздухом. Пылесос для этих целей не подходит.
- Периодически контролировать состояние узлов, производить замену. Срок службы электролитических конденсаторов составляет пять лет, предохранительных вставок – десять лет. Охлаждающие вентиляторы работают до замены 3 года. Шлейфы проводов используются шесть лет.
- Контроль напряжения шины постоянного тока и температура механизмов является необходимым мероприятием. При повышенной температуре термопроводящая паста засыхает и выводит из строя конденсаторы. Каждые 3 года на силовые клеммы наносят слой токопроводящей пасты.
- Условия и режим работы необходимо соблюдать в строгом соответствии. Температура окружающей среды не должна превышать 40 градусов. Пыль и влажность отрицательно влияют на состояние рабочих элементов прибора.
Экономическое обоснование эффекта от инвертора
Время окупаемости инвертора рассчитывается отношением затрат на покупку к экономии энергии. Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Экономия обычно равна от 20 до 40% от номинальной мощности мотора.
Затраты снижают факторы, повышающие производительность частотных преобразователей:
- Уменьшение затрат на обслуживание.
- Повышение ресурса двигателя.
Экономия рассчитывается:
где Э – экономия денег в рублях;
Р пч – мощность инвертора;
Ч – часов эксплуатации в день;
Д – число дней;
К – коэффициент ожидаемого процента экономии;
Т – тариф энергии в рублях.
Время окупаемости равно отношению затрат на покупку инвертора к экономии денег. Расчеты показывают, что период окупаемости получается от 3 месяцев до 3 лет. Это зависит от мощности мотора.
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Для чего необходимо знать мощность двигателя
Из всех технических характеристик электродвигателя (КПД, номинальный рабочий ток, частота вращения и т.д.) самая значимая – мощность. Зная главные данные, вы сможете:
- Подобрать подходящие по номиналам тепловое реле и автомат.
- Определить пропускную способность и сечение электрических кабелей для подключения агрегата.
- Эксплуатировать двигатель согласно его параметрам, не допуская перегрузок.
Мы описали, как замерить мощность электродвигателя разными способами. Используйте тот, который в вашем случае будет оптимальным. Применяя любой из методов, вы подберете агрегат, который будет лучшим образом отвечать вашим требованиям. Но самый эффективный вариант, экономящий ваше время и избавляющий вас от необходимости искать информацию и проводить замеры и расчеты – это сохранить технический паспорт в надежном месте и следить за тем, чтобы шильдик с данными не потерялся.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Корректируем обороты
Работа с разнообразным электрическим инструментом и оборудованием в быту или на производстве непременно ставит вопрос о том, как регулировать обороты электродвигателя. Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Например, становится необходимым изменить скорость передвижения деталей в станке или по конвейеру, скорректировать производительность насосов, уменьшить или увеличить расход воздуха в вентиляционных системах.
Осуществлять указанные процедуры за счет понижения напряжения практически бессмысленно, обороты будут резко падать, существенно снизится мощность устройства. Поэтому используются специальные устройства, позволяющие корректировать обороты двигателя. Рассмотрим их более подробно.
Микроконтроллер управляет всем процессом работы преобразователя
Благодаря такому подходу появляется возможность добиться плавного повышения оборотов двигателя, что крайне важно в механизмах с большой нагрузкой. Медленный разгон снижает нагрузки, положительно сказываясь на сроке службы производственного и бытового оборудования
Все преобразователи оснащаются защитой, имеющей несколько степеней. Часть моделей работает за счет однофазного напряжения в 220 В. Возникает вопрос, можно ли сделать так, чтобы трехфазный мотор вращался благодаря одной фазе? Ответ окажется положительным при соблюдении одного условия.
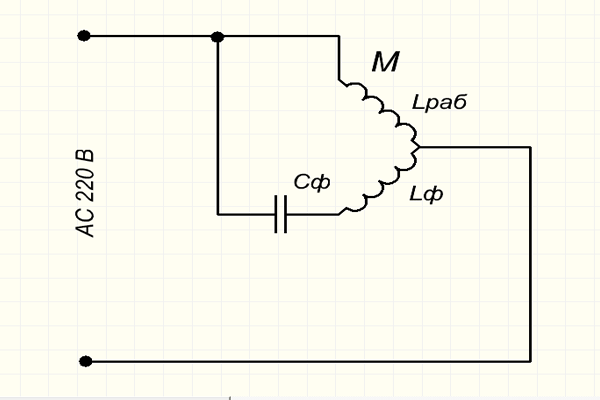
При подаче однофазного напряжения на обмотку требуется осуществить «толчок» ротора, поскольку сам он не сдвинется с места. Для этого нужен пусковой конденсатор. После начала вращения двигателя оставшиеся обмотки будут давать недостающее напряжение.
Существенным минусом такой схемы считается сильный перекос фаз. Однако он легко компенсируется включением в схему автотрансформатора. В целом, это довольно сложная схема. Преимущество же частотного преобразователя заключается в возможности подключения моторов асинхронного типа без применения сложных схем.
Определяем обороты
Существует несколько способов измерения оборотов электродвигателя. Самый надежный заключается в использовании тахометра – устройства, предназначенного именно для этих целей. Однако такой прибор есть не у каждого человека, тем более, если он не занимается электрическими моторами профессионально. Поэтому существует несколько иных вариантов, позволяющих справиться с задачей «на глаз».
Первый подразумевает снятие одной из крышек двигателя с целью обнаружения катушки обмотки. Последних может быть несколько. Выбирается та, которая более доступна и расположена в зоне видимости. Главное, во время работы не допустить нарушения целостности устройства.
Когда катушка открылась взору, необходимо ее внимательно осмотреть и постараться сравнить размер с кольцом статора. Последний является неподвижным элементом электродвигателя, а ротор, находясь внутри него, осуществляет вращение.
Второй способ связан с обмотками внутри статора. Считается количество пазов, которые занимает одна секция какой-либо катушки. Пазы расположены на сердечнике, их число свидетельствует о количестве пар полюсов. 3000 оборотов в минуту будет при наличии двух пар полюсов, при четырех – 1500 оборотов, при шести – 1000.
Ответом на вопрос о том, от чего зависит количество оборотов электродвигателя, будет утверждение: от числа пар полюсов, причем это обратно пропорциональная зависимость.
На корпусе любого заводского двигателя имеется металлическая бирка, на которой указаны все характеристики. На практике такая бирка может отсутствовать или стереться, что немного усложняет задачу определения числа оборотов.
Двигатели постоянного тока
Кроме машин переменного напряжения есть электродвигатели, подключающиеся к сети постоянного тока. Число оборотов таких устройств рассчитывается по совершенно другим формулам.
Номинальная скорость вращения
Число оборотов аппарата постоянного тока рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- U – напряжение сети,
- Rя и Iя – сопротивление и ток якоря,
- Ce – константа двигателя (зависит от типа электромашины),
- Ф – магнитное поле статора.
Эти данные соответствуют номинальным значениям параметров электромашины, напряжению на обмотке возбуждения и якоре или вращательному моменту на валу двигателя. Их изменение позволяет регулировать частоту вращения. Определить магнитный поток в реальном двигателе очень сложно, поэтому для расчетов пользуются силой тока, протекающего через обмотку возбуждения или напряжения на якоре.
Число оборотов коллекторных электродвигателей переменного тока можно найти по той же формуле.
Регулировка скорости
Регулировка скорости электродвигателя, работающего от сети постоянного тока, возможна в широких пределах. Она возможна в двух диапазонах:
- Вверх от номинальной. Для этого уменьшается магнитный поток при помощи добавочных сопротивлений или регулятора напряжения;
- Вниз от номинальной. Для этого необходимо уменьшить напряжение на якоре электромотора или включить последовательно с ним сопротивление. Кроме снижения числа оборотов это делается при запуске электродвигателя.
Знание того, по каким формулам вычисляется скорость вращения электродвигателя, необходимо при проектировании и наладке оборудования.
Как определить мощность асинхронного электродвигателя.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание!
Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
Достоинства:
большой диапазон регулирования в сторону понижения скорости вращения.
Недостатки:
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Способы определения характеристик электромотора.
Чтобы определить, к какой из этих групп относится двигатель, не нужно разбирать его, как это советуют некоторые специалисты, чтобы обеспечить себе заказ на работу. Дело в том, что разбор электродвигателя может осуществить только мастер достаточной квалификации. На самом же деле достаточно открыть защитную крышку (другое название подшипниковый щит) и найти катушку обмотки. Таких катушек может быть несколько, но достаточно одной. В случае если к валу прикреплены полумуфта или шкив, потребуется снять еще и нижний щит.
Если катушки соединены при помощи деталей, которые мешают рассмотреть информацию, эти детали ни в коем случае нельзя отсоединять. Нужно попробовать определить на глаз соотношение размера катушки и статора.
Статором называется неподвижная часть электромотора, подвижная же имеет название ротор. В зависимости от конструктивных особенностей, в качестве ротора может выступать как сама катушка, так и магниты.
Если катушка закрывает собой половину кольца статора, такой двигатель относится к третьей группе, то есть способен выдавать до 3000 оборотов. Если размер катушки составляет треть от размеров кольца, это мотор второго типа, соответственно, он способен развить 1500 оборотов в минуту. Наконец, если катушка только на четверть закрывает собой кольцо, это первый тип. Электромотор развивает мощность в 1000 оборотов.
Существует еще один способ определения частоты вращения вала роторной части. Для этого также нужно снять крышку и найти верхнюю часть обмотки. По расположению секций обмотки и определяется скорость. Обычно внешняя секция занимает 12 пазов. Если сосчитать общее количество пазов и разделить на 12, можно получить число полюсов. Если число полюсов равно 2, двигатель имеет скорость вращения около 3000 об/мин. Если полюсов получилось 4, это соответствует 1500 оборотам в минуту. Если 6, то 1000 об/мин. Если 8, то 700 оборотов.
Третий способ определения количества оборотов внимательно осмотреть бирку на самом двигателе. Цифра на маркировке в конце и соответствует числу полюсов. Например, для маркировки АИР160S6 последняя цифра 6 указывает, сколько полюсов использует катушка.
Проще же всего измерить число оборотов специальным прибором тахометром. Но в силу узкой специализации применения данный способ нельзя рассматривать как общедоступный. Таким образом, даже если не сохранилось никакой технической документации, существует как минимум 4 способа определить число оборотов электрического мотора.
При поступлении в ремонт электродвигателя с отсутствующей табличкой, приходиться определять мощность и обороты по статорной обмотке. В первую очередь нужно определить обороты электродвигателя. Самый простой способ для определения оборотов в однослойной обмотке это посчитать количество катушек (катушечных групп).
| Количество катушек (катушечных групп) в обмотке шт. | Частота вращения об/мин. При частоте питающей сети f=50Гц. | ||
| Трёхфазные | Однофазные в рабочей обмотке | ||
| Односл. | Двухсл. | ||
| 6 | 6 | 2 | 3000 |
| 6 | 12 | 4 | 1500 |
| 9 | 18 | 6 | 1000 |
| 12 | 24 | 8 | 750 |
| 15 | 30 | 10 | 600 |
| 18 | 36 | 12 | 500 |
| 21 | 42 | 14 | 428 |
| 24 | 48 | 16 | 375 |
| 27 | 54 | 18 | 333 |
| 30 | 60 | 20 | 300 |
| 36 | 72 | 24 | 250 |
По таблице у однослойных обмоток на 3000 и 1500 об/мин. одинаковое количество катушек по 6, визуально отличить их можно по шагу. Если от одной стороны катушки к другой стороне провести линию, и линия будет проходить через центр статора, то это обмотка 3000 об/мин. рисунок №1. У электродвигателей на 1500 оборотов шаг меньше.
| 2p | 2 | 4 | 6 | 8 | 10 | 12 |
| об/ мин f=50Гц | 3000 | 1500 | 1000 | 750 | 600 | 500 |
| 2p | 14 | 16 | 18 | 20 | 22 | 24 |
| об/ мин f=50Гц | 428 | 375 | 333 | 300 | 272 | 250 |
| 2p | 26 | 28 | 30 | 32 | 34 | 36 |
| об/ мин f=50Гц | 230 | 214 | 200 | 187,5 | 176,4 | 166,6 |
| 2p | 38 | 40 | 42 | 44 | 46 | 48 |
| об/ мин f=50Гц | 157,8 | 150 | 142,8 | 136,3 | 130,4 | 125 |
Как изменить скорость работы двигателя?
Изменять скорость вращающего момента механизма оборудования можно различными способами, например, механическими редукторами с переключением передач, муфтами и другими устройствами. Но это не всегда возможно. Практически используется 7 способов коррекции частоты вращения регулируемых приводов. Все способы разделены на два основных направления.
- Коррекция магнитного поля путем воздействия на частоту тока, уменьшение или увеличение числа пар полюсов, коррекция напряжения. Направление характерно моторам с короткозамкнутым (КР) ротором.
- Скольжение корректируется напряжением питания, добавлением еще одного резистора в цепь схемы ротора, установкой двойного питания, использованием каскада вентилей. Такое направление используется для роторов с фазами.
- Частотники бывают с двумя видами управления: скалярное, векторное. При скалярном управлении прибор действует при определенных значениях выходной разности потенциалов и частотой, работают в примитивных домашних приборах, например, вентиляторах. При векторном управлении сила тока устанавливается достаточно точно.
- При выборе прибора параметры мощности играют определяющую роль. Величина мощности расширяет сферу использования, упрощает обслуживание.
- При выборе устройства учитывается интервал рабочего напряжения сети, что снижает опасность выхода его из строя из-за резких перепадов разности потенциалов. При чрезмерном повышении напряжения конденсаторы сети могут взорваться.
- Частота – немаловажный фактор. Его величина определяется требованиями производства. Наименьшее значение говорит о возможности использования скорости в оптимальном режиме работы. Для получения большего интервала частоты применяют частотники с векторным управлением. В реальности часто используются инверторы с интервалом частот от 10 до 10 Гц.
- Частотный преобразователь, имеющий много разных выходов и входов удобен в пользовании, но стоимость его выше, настройка сложнее. Разъемы частотников бывают трех типов: аналоговые, дискретные, цифровые. Связь обратного вида вводных команд производится через аналоговые разъемы. Цифровые клеммы производят ввод сигналов от датчиков цифрового типа.
- Выбирая модель частотного преобразователя, нужно дать оценку управляющей шине. Ее характеристика подбирается под схему инвертора, что обуславливает число колодок. Наилучшим выбором работает частотник с запасом количества разъемов для дальнейшей модернизации прибора.
- Частотники, выдерживающие большие перегрузки (на 15% выше мощности мотора), при выборе имеют предпочтения. Чтобы не ошибиться при покупке преобразователя частоты, ознакомьтесь с инструкцией. В ней имеются главные параметры эксплуатации оборудования. Если нужен прибор для максимальных нагрузок, то необходимо выбирать частотник, сохраняющий ток на пике работы выше, чем на 10% от номинала.
Что такое шпиндель
Винчестер представляет собой набор из одной или нескольких герметизированных пластин в форме дисков, покрытых слоем ферромагнитного материала и считывающих головок в одном корпусе. Пластины приводятся в движение при помощи шпинделя (вращающегося вала). Пластины жесткого диска закреплены на шпинделе на строго определенном расстоянии. При вращении пластин расстояние должно быть таким, чтобы считывающие головки могли читать и записывать на диск, но при этом не касались поверхности пластин.
Двигатель шпинделя должен обеспечивать стабильное вращение магнитных пластин на протяжении тысяч часов, чтобы диск нормально функционировал. Неудивительно, что иногда проблемы с диском связаны с заклиниванием шпинделя, и вовсе не являются ошибками в файловой системе.
Двигатель отвечает за вращение пластин, и это позволяет работать жесткому диску. Благодаря отсутствию контакта, жесткий диск можно перезаписать в среднем 100 тысяч раз. Также на продолжительность работы диска влияет герметический корпус (гермозона), благодаря которому внутри корпуса HDD создается пространство, очищенное от пыли и влаги.
Вот как выглядят шпиндели, у каждого производителя они немного внешне могут отличаться. Это вот шпиндели от винтов Samsung.
или вот еще подборочка.
spindle speed или по русски скорость вращения шпинделя, определяет насколько быстро вращаются пластины в нормальном режиме работы жесткого диска. Она измеряется в RpM, то есть оборотах в минуту. От RpM скорости, будет зависеть на сколько быстро будет работать ваш компьютер, а именно как быстро компьютер может получить данные от жесткого диска.
Сколько раз я видел тормозные ноутбуки, в которых было по 4 ГБ оперативной памяти, там стоял процессор Intel core i3 или даже i5, но стоял блин hdd со скоростью вращения 5400 оборотов в минуту, и это был полный трешь, такие винты нужно сразу вытаскивать и ставить ssd иначе работать было не возможно
Время, которое требуется для блока магнитных головок, чтобы перейти к запрошенной дорожке/цилиндру называется время поиска (seek latency или задержкой). После того как считывающие головки переместятся в нужную дорожку/цилиндр, мы должны дождаться поворота пластин, чтобы нужный сектор оказался под головкой — это задержки на вращение (rotational latency time). И это является прямой функцией скорости шпинделя. То есть, чем быстрее скорость шпинделя, тем меньше задержки на вращение.
Влияние скорости вращения шпинделя жесткого диска
Винчестеры бывают двух форматов LFF и SFF, если рассказать в двух словах, то один имеет формат 2,5 дюйма, а второй 3,5. Формат 2,5 чаще всего идет либо в серверах или в ноутбуках, а второй так же в серверах и обычных системных блоках.
Если посмотреть среднюю скорость стандартных 3,5 » жестких дисков, то это скорость вращения шпинделя 7200 оборотов в минуту. Время совершения половины оборота в среднем (Avg. Rotational Latency) для таких дисков 4,2 мс. Эти диски обычно имеют среднее время поиска около 8,5 мс, что дает средний доступ к времени данным около 12,7 мс.
Есть диски, которые имеют скорость вращения магнитных пластин 10000 оборотов в минуту. Это уменьшает среднее время задержки на вращение до 3 мс. У Рапторов также и пластины меньшего диаметра, что позволило сократить среднее время поиска до ~5,5 мс. Итоговое среднее время доступа к данным примерно 8,5 мс.
Есть несколько моделей SCSI (например, Seagate Cheetah), у которые скорость вращения шпинделя 15 000 оборотов в минуту, и еще меньшие пластины. Среднее время Rotational Latency 2 мс (60 сек / 15 000 RPM / 2), среднее время поиска — 3,8 мс, и среднее время доступа к данным — 5,8 мс.
Диски с высокой частотой вращения шпинделя имеют низкие значения времени поиска и Rotational Latency даже при произвольном доступе. Жесткие диски с частотой шпинделя 5600 и 7200 обладают меньшей производительностью.
При этом при последовательном доступе к данным большими блоками разница будет несущественна, так как не будет задержки на доступ к данным, поэтому для жестких дисков рекомендуется регулярно делать дефрагментацию.
У 2,5 коллег, скорость так же скачет от 5400 до 15 000 оборотов в минуту.
| Электролитические конденсаторы для этой схемы надо брать на рабочее напряжение не менее 450В. С более низким не подойдут. И еще: при любом соединении обмоток электродвигателя, кроме пусковых электролитических конденсаторов, желательно добавить рабочие фазосдвигающие конденсаторы типа МБГЧ, МБГП на рабочее напряжение 400…600В, хотя бы и емкостью в 3…4 раза менее расчетной. Это значительно улучшит работу двигателя при переменных нагрузках (деревообрабатывающий станок, точило, корнерезка и т.п.). Напомним, что расчетная емкость выбирается из условия Сраб=(1,5…2)*66*Рном (читайте схему к рис.2). Теперь немного практики. Предположим, у вас двигатель мощностью 300Вт и его выводы соединены «треугольником» (рис.6). Такой двигатель без нагрузки успешно запустится и от одного правильно подобранного конденсатора в 40мкФ, включенного в цепь двигателя. А вот если его заменить диодно-конденсаторной сборкой (рис.4), то понадобится уже их уже четыре, т.е. если ориентироваться по рис.4, то каждый из двух нарисованных конденсаторов должен состоять состоять из последовательно соединенных двух электролитических конденсаторов по 40мкФ. Понятно, что рабочее напряжение их желательно чтобы превышало хоть немного сетевое. Поэтому, если он у вас запускается без проблем и од одного конденсатора, то в диодной сборке нет смысла. А вот, если его мощность превышает 1…1,5кВт, или он тяжело разгоняется, то нужно использовать диодно-конденсаторную сборку. Также диодно-конденсаторную сборку целесообразно использовать при соединении обмоток двигателя по схеме «разорванная звезда» (рис.7). Эта схема дает наибольший крутящий момент при запуске двигателя даже с нагрузкой на валу. Электролитические конденсаторы в этой схеме лучше взять с напряжением не менее 450В и собрать согласно схемы рис.7. Рабочий фазосдвигающий конденсатор берется по формуле Ср=66*Рном, т.е. при 1кВт подойдет 60мкФ. Это могут быть бумажные типа МБГП на напряжение 600В. Пусковая электролитическая сборка рассчитывается как (2…3)*Ср, т.е. это в пределах 120…180мкФ. * с использованием материала статьи Ю.А.Сытник «Использование сборки конденсаторов для запуска электродвигателя» Схемы торможения 3-х фазных асинхронных двигателейДанное устройство торможения имеет авторское свидетельство СССР №1295495 кл. Н 02 Р3/24, 1987. На рис.9 и рис.10 представлена еще одна схема торможения асинхронного 3-х фазного двигателя. Эта схема обеспечивает торможение любого двигателя до 3кВт в течение 6 секунд. Эту схему мы лично составили и испытывали на производстве со всеми асинхронными 3-х фазными двигателями до 3кВт включительно. Сама схема включения в работу двигателя и его торможения проста и представлена на рис.10. В работу двигатель включается подачей питающего напряжения через контакты контактора К1. Режим торможения осуществляется подачей однополупериодного выпрямленного диодом VD1 напряжения на статор двигателя. Причем одна фаза подается на одну обмотку, а другая на оставшиеся две, которые в режиме торможения соединяются между собою контактами К2.2 и К2.3 контактора К2. Одна из фаз не используется. Сразу, оговоримся, что, если две оставшиеся обмотки не объединить между собою контактами К2.2 и К2.3, а подать вторую фазу только на одну обмотку — торможения не получится. Поэтому для 3-х фазных двигателей там, где общая точка соединения трех обмоток не доступна по конструктивным причинам их намотки, т.е. не выведена наружу, необходимо соединить в режиме торможения две обмотки. А вот на тех двигателях, где общая точка выведена наружу и доступна для монтажа, рекомендуется выпрямленное напряжение подать на две любые обмотки, а третью закоротить контактом контактора К2. Такое решение показано на рис.11. А вот схема подключения кнопочного поста управления режимами двигателя немного посложнее. Здесь выполнена защита от возможности включения сразу двух режимов во избежании неприятных последствий. Рассмотрим поконкретнее. Схема управления пусковой катушкой К1 почти стандартная за исключением «врезанного» в цепь ее управления нормально замкнутого контакта К2.4 от катушки торможения К2. Он защищает двигатель от включения пускового режима, пока идет процесс торможения и катушка К2 включена. Пока она будет включена, контакт К2.4 будет разомкнут вместе со стоповой кнопкой SB1. Но начнем по порядку. | Устройство для динамического торможения конденсаторного электродвигателя Представленная схема устройства по авторскому свидетельству №1023598, КЛ. НО2р 3/24, 15.06.83 предназначена для динамического торможения асинхронного конденсаторного электродвигателя с короткозамкнутым ротором малой мощности, которое обеспечивает его автоматическое торможение при отключении от сети путем кратковременного протекания пульсирующего тока по его обмоткам. |
Как управлять скоростью электродвигателя переменного тока
Электродвигатель переменного тока — это электродвигатель, приводимый в действие переменным током (AC), и состоит из двух основных частей: внешнего статора с катушками, на которые подается переменный ток для создания вращающегося магнитного поля. и внутренний ротор, прикрепленный к выходному валу, создающий второе вращающееся магнитное поле. Возможность управлять скоростью двигателя имеет множество преимуществ, и в этом руководстве будут рассмотрены несколько способов управления скоростью двигателя.
Как отмечалось выше, управление скоростью электродвигателя переменного тока имеет ряд преимуществ, включая снижение слышимого шума, энергоэффективность и улучшенное управление приложением двигателя. Несмотря на то, что они являются устройствами с постоянной скоростью, скорость двигателя переменного тока может изменяться при изменении частоты, входного напряжения или обмоток, которые заставляют двигатель вращаться.
Распространенным и эффективным средством изменения скорости двигателя является изменение частоты с использованием инвертора в качестве источника питания.Благодаря технологическому прогрессу и снижению стоимости силовых инверторов, это часто используемый и популярный вариант. Способы снижения напряжения на обмотках двигателя с помощью трансформаторов, резисторов или отводов обмоток двигателя также все еще используются.
Если вы планируете использовать инвертор для питания электродвигателя переменного тока, важно выбрать такой, который может обеспечивать не только напряжение двигателя и рабочий ток, но и пусковой ток. Используйте диапазон изменения скорости, необходимый для выбора диапазона частоты, которую инвертор должен обеспечивать.Элементы управления инвертора могут использоваться для изменения частоты, подаваемой на двигатель, и скорость двигателя будет изменяться соответствующим образом.
Если полностью точное регулирование скорости не критично для двигателя, можно также добавить переменное сопротивление в цепь двигателя, чтобы снизить напряжение на основной обмотке. «Проскальзывание» двигателя — разница между синхронной скоростью магнитного поля электродвигателя и скоростью вращения вала — которая обычно близка к нулю, будет увеличиваться, поскольку на двигатель подается уменьшенная мощность.Кроме того, полюса двигателя не получают достаточной мощности для создания силы, необходимой для поддержания нормальной скорости, и в этом методе двигатель должен быть рассчитан на высокое скольжение.
Более эффективным вариантом является использование трансформатора переменного напряжения. Этот метод изменит напряжение, подаваемое на главную обмотку, что приведет к большому скольжению и уменьшению напряжения управления скоростью. Трансформатор переменного напряжения имеет низкие потери по сравнению с переменным резистором. Использование трансформатора может иметь серию ответвлений, которые изменяют соотношение напряжений для управления скоростью двигателя.Эти ответвления можно менять вручную, или трансформатор может иметь устройство переключения ответвлений с электроприводом. В любом случае скорость двигателя изменяется дискретно, и конкретная конструкция зависит от установки, в которой используется трансформатор.
Другой метод управления скоростью двигателя переменного тока — использование двигателя переменного тока с ответвленными обмотками для изменения скорости. Этот метод чаще всего встречается в домашних вентиляторах с переключателями высокой, средней и низкой скорости. Эти двигатели имеют заданное количество ответвлений на основной обмотке, что позволяет им работать с различными напряжениями, приложенными к его магнитному полю.Количество ступеней и скоростей, доступных для двигателя, обычно не превышает четырех. Точная скорость в этих типах приложений не имеет решающего значения, и регулирование скорости с помощью этой опции очень экономично.
Частотно-регулируемый привод (VFD) — это еще один вариант, который представляет собой контроллер двигателя переменного тока, который управляет двигателем, изменяя подаваемую на него частоту и напряжение. Частота (или герц) напрямую связана со скоростью двигателя (об / мин), поэтому чем выше частота, тем выше частота вращения. Если приложение двигателя не требует, чтобы он работал на полной скорости, можно использовать частотно-регулируемый привод для уменьшения частоты и напряжения в соответствии с требованиями к нагрузке двигателя.Когда требования к скорости двигателя в приложении меняются, частотно-регулируемый привод будет эффективно уменьшать или увеличивать скорость двигателя, удовлетворяя требованиям по скорости. Использование частотно-регулируемого привода может обеспечить снижение энергопотребления и затрат, увеличение производства за счет более жесткого контроля процесса и продление срока службы оборудования при одновременном снижении требований к обслуживанию.
Наконец, регулировка величины напряжения на клеммах двигателя с помощью широтно-импульсной модуляции (ШИМ) также может управлять скоростью двигателя. Как следует из этого термина, ШИМ-регулирование скорости работает путем управления двигателем с помощью быстрой серии импульсов «ВКЛ» и «ВЫКЛ» и изменения рабочего цикла.Мощность, подаваемая на двигатель, регулируется путем изменения ширины этих приложенных импульсов, что, в свою очередь, изменяет среднее напряжение, подаваемое на клеммы двигателя. Модулируя или изменяя синхронизацию этих импульсов, можно управлять скоростью двигателя. Таким образом, чем дольше импульс находится в состоянии «ВКЛ», двигатель будет вращаться быстрее, и, наоборот, чем короче время «ВКЛ» импульса, тем медленнее будет вращаться двигатель.
С помощью нескольких простых регулировок или изменений можно управлять скоростью электродвигателя переменного тока.Посетите Zoro.com, где представлен широкий спектр регуляторов скорости переменного тока от ведущих поставщиков.
arduino — Как уменьшить скорость двигателя без потери максимального крутящего момента
Кажется, вы не знаете, что вам нужно. Если вы хотите уменьшить скорость двигателя, но вам по-прежнему нужен максимальный крутящий момент, вы должны подать на двигатель полную номинальную электрическую мощность и поставить на двигатель механический тормоз, пока он не снизится до желаемой скорости. Или вы должны каким-то образом сделать ваш мотор менее эффективным. Не думаю, что ты этого хочешь.
Подумайте об этом так: электрическая мощность — это произведение тока \ $ I \ $ и напряжения \ $ E \ $:
$$ P = I E $$
Механическая мощность — это произведение крутящего момента (\ $ \ tau \ $, в ньютон-метрах) и угловой скорости (\ $ \ omega \ $, в радианах в секунду):
$$ P = \ tau \ omega $$
Двигатель — это преобразователь электрической энергии в механический. Механическая мощность всегда равна электрической мощности после потерь.
Кроме того, ток пропорционален крутящему моменту, потому что чем больше ток вы применяете, тем сильнее магнитное поле внутри двигателя, и притяжение между полюсами двигателя становится больше.
Если механическая и электрическая мощности соотносятся, а также ток и крутящий момент, тогда должны быть также согласованы напряжение и скорость. И они есть, потому что чем быстрее ротор вращается через поле статора, тем большую обратную ЭДС он будет генерировать. Это закон индукции Фарадея.
Итак, если вы хотите уменьшить скорость, уменьшите напряжение. Если вы хотите уменьшить крутящий момент, уменьшите ток. Если вы увеличиваете крутящий момент (например, притормаживая двигатель), вы увеличиваете крутящий момент двигателя.2 $$
Таким образом, по мере увеличения тока резистивные потери увеличиваются, что делает двигатель менее эффективным преобразователем электрической энергии в механическую, поскольку часть этой электрической энергии теперь выделяет тепло. Если вы остановите двигатель, то он достигнет КПД 0%: скорость равна нулю, поэтому механическая мощность должна быть равна нулю, но двигатель потребляет тонну тока, и есть падение напряжения на сопротивлении обмотки, поэтому электрическая мощность очень высоко.
Интересный факт: если вы можете сделать двигатель без сопротивления обмотки (или других потерь) и подключить его к идеальному источнику напряжения, то регулирование скорости (насколько скорость изменяется с крутящим моментом) идеально.То есть двигатель не замедлится, если вы попытаетесь его остановить: он просто будет потреблять ровно столько тока от вашей батареи, чтобы продолжать вращаться с той же скоростью, несмотря ни на что.
PWM здесь не имеет отношения. ШИМ-управление двигателем — это просто способ эффективно подать на двигатель напряжение ниже полного. Это работает, потому что двигатель с ШИМ-управлением эквивалентен понижающему преобразователю. Изменение рабочего цикла ШИМ эквивалентно изменению напряжения питания:
Максимальный крутящий момент, который вы можете получить (который вы получите при остановке двигателя), ограничен током, который может подавать ваш источник питания, и потерями в двигателе, как и без ШИМ.Ваш драйвер PWM может добавить немного сопротивления к цепи, немного уменьшив ток и крутящий момент, но обычно это не имеет значения по сравнению с сопротивлением обмоток двигателя.
Сопротивление— Могу ли я использовать резистор для замедления двигателя постоянного тока?
Использование шестерен всегда лучше, потому что это метод, который обеспечивает максимальный процент мощности двигателя. Поскольку мощность — это крутящий момент, умноженный на скорость, сохранение большей части мощности двигателя увеличивает крутящий момент при одновременном снижении скорости.
Широтно-импульсная или амплитудно-импульсная модуляция занимает второе место. Это может сохранить максимальный крутящий момент при одновременном снижении рабочей скорости и мощности. Лучший способ поддерживать крутящий момент — это иметь внутренний контур управления, который регулирует крутящий момент путем регулирования тока. Внешний контур управления регулирует скорость и обеспечивает текущее задание. Поскольку используется импульсный стабилизатор, потери мощности меньше, чем при использовании линейного управления или последовательного сопротивления.
Разумеется, можно использовать последовательный резистор. Это может быть переменное сопротивление (реостат) или один или несколько постоянных резисторов. При использовании последовательного резистора потери мощности прямо пропорциональны процентному снижению скорости. Поскольку нет контроля тока, добавление сопротивления увеличивает изменение скорости в результате любого изменения нагрузки. Изменение скорости из-за изменения нагрузки увеличивается пропорционально уменьшению скорости. Также существует изменение скорости, вызванное изменением сопротивления из-за изменения температуры резистора.
Дополнительные соображения
Если требуется не только «замедление», но и регулируемая скорость, лучше всего выбрать передачу для надлежащей максимальной скорости, а затем использовать электронное управление для обеспечения изменения. Большие двигатели постоянного тока редко используются для работы с фиксированной скоростью, но электронное управление или последовательное сопротивление могут потребоваться только для запуска более мощного двигателя постоянного тока, чтобы избежать чрезмерного пускового тока.
Для очень маленьких двигателей постоянного тока последовательное сопротивление может быть вполне достаточным в некоторых ситуациях в зависимости от различных факторов, таких как источник питания, рабочий цикл, анализ затрат, максимальное снижение скорости, стабильность нагрузки и т. Д.
Устранение колебаний скорости двигателя, вызванных входным напряжением или колебаниями нагрузки
Двигатель переменного тока может быть простым в использовании, но его скорость изменяется в зависимости от величины нагрузки или величины подаваемого напряжения. Для приложений, где важно поддерживать постоянную скорость, существует другой тип двигателя, который может улучшить производительность.
Во-первых, давайте разберемся, как двигатель переменного тока определяет свой «номинальный крутящий момент» и «номинальную скорость». Номинальный крутящий момент и номинальная скорость — это то место, где двигатель будет работать наиболее эффективно при заданном напряжении, двигателе и нагрузке.Взаимосвязь между крутящим моментом и скоростью отображается на кривой крутящего момента скорости, которая отображает ожидаемую производительность двигателя. Двигатель либо ускоряется, либо замедляется в зависимости от момента нагрузки. Идеально подходит для правильного выбора двигателя, чтобы вы могли работать с максимальной эффективностью (номинальный крутящий момент и номинальная скорость).
Посмотрите на приведенную ниже кривую скорость-крутящий момент для асинхронного двигателя переменного тока. Когда вы подаете питание на двигатель переменного тока, двигатель начинает работать с 0 об / мин, постепенно увеличивает скорость до тех пор, пока не войдет в стабильную область, а затем установится на «номинальную скорость».Эта номинальная скорость где-то ниже «скорости холостого хода» и «синхронной скорости» и определяется крутящим моментом нагрузки, приложенным к двигателю. Если вы проведете горизонтальную линию от номинального значения крутящего момента по оси Y до стабильного участка кривой, номинальная скорость будет там, где она пересекает кривую.
Математически вот формула, которая определяет «синхронную скорость» двигателя.
Oriental Motor производит двухполюсные и четырехполюсные двигатели переменного тока. Для трехфазного двигателя переменного тока с входным напряжением 220 В переменного тока, 60 Гц синхронная скорость двигателя (об / мин) = 120 x 60/4 = 1800 об / мин.Синхронная скорость — это, по сути, скорость без нагрузки при скольжении. Поскольку приложение номинальной нагрузки замедлит двигатель до его номинальной скорости, разница между номинальной скоростью и синхронной скоростью заключается в наличии номинальной нагрузки.
Однако, если крутящий момент увеличивается из-за изменяющейся массы груза, например, коробчатый конвейер в почтовом отделении, несущий грузы разной массы, требуемый крутящий момент увеличится (сила x радиус шкива), и вы больше не сможете работать с номинальной нагрузкой. линия крутящего момента.Вместо этого скорость двигателя колеблется вверх и вниз вместе с изменениями момента нагрузки. На приведенном ниже графике показан пример, в котором повышенная нагрузка трения замедлит двигатель переменного тока.
Помните, я сказал, что кривая крутящего момента предназначена для данного напряжения, двигателя и нагрузки? Теперь посмотрим, как колебание входного напряжения может изменить кривую. Более высокое напряжение создает более высокий крутящий момент, сдвигая кривую вверх и наоборот. На характеристики скорости и ускорения также влияет изменение доступного крутящего момента. К сведению: если у вас есть двигатель переменного тока, скорость которого колеблется при той же нагрузке, то одним из первых шагов при поиске и устранении неисправностей будет проверка того, колеблется ли входное напряжение двигателя. |
|
На данный момент достаточно теории. Некоторые частотно-регулируемые приводы предлагают векторное управление и компенсацию скольжения двигателя для уменьшения колебаний скорости и регулирования выходного напряжения на двигатель, но точная настройка параметров двигателя требует времени.Есть еще одно решение plug and play, которое может помочь.
В этом примере применения мы рассмотрим устройство подачи деталей (вибрирующую чашу питателя), в котором используется двигатель переменного тока.
Устройство подачи деталей распределяет нагрузки в заданном направлении и отправляет их на следующий производственный процесс, вибрируя питатель с помощью трехфазного асинхронного двигателя переменного тока. VFD (инвертор) используется для управления скоростью.
Общие проблемы:
- Скорость подачи изменяется из-за колебаний входного напряжения двигателя.
- Изменяющиеся нагрузки также могут изменить скорость подачи.
- Точная регулировка скорости для различных нагрузок затруднена.
| Решение, которое может устранить все эти проблемы, — это бесщеточный двигатель с постоянными магнитами и управлением с обратной связью. Бесщеточные двигатели Oriental Motor в сочетании со специальными драйверами обеспечивают оптимальную производительность и регулирование скорости с обратной связью на уровне +/- 0,2% или выше. Более высокая эффективность, компактный размер, более низкая рабочая температура и постоянный крутящий момент — это другие преимущества бесщеточных двигателей, которые также могут помочь улучшить производительность. |
|
Выделенный драйвер может принимать входное напряжение в широком диапазоне и регулировать его выход на двигатель. Пример нашей серии BMU 30 Вт показан ниже. Если вы посмотрите на характеристики блока питания, вы увидите широкий диапазон входных напряжений. Пока входное напряжение находится в этом диапазоне (100 ~ 120 В переменного тока), можно ожидать такой же производительности.
Управление с обратной связью достигается за счет встроенных в двигатели датчиков Холла.Сигналы датчика Холла используются как для измерения скорости двигателя, так и для определения времени последовательности возбуждения статора. Специальный драйвер обеспечивает лучшее регулирование скорости, всегда сравнивая заданную скорость (заданную скорость) с фактической скоростью (скорость, рассчитанная по импульсам датчика Холла). Если скорость выходит за пределы допуска, корректировка скорости выполняется мгновенно на лету.
Двигатель переменного тока и бесщеточный двигатель Сравнение производительности:
Благодаря постоянным магнитам, цифровому управлению ШИМ (широтно-импульсной модуляцией), регулируемому напряжению, постоянному крутящему моменту и управлению с обратной связью, бесщеточные двигатели обеспечивают стабильное управление скоростью и следующие улучшения по сравнению с двигателями переменного тока и частотно-регулируемыми приводами.
Регулировка скорости измеряется при номинальной скорости. Для бесщеточного двигателя номинальная скорость обычно выше 3000 об / мин. Для двигателя переменного тока это около 1500 об / мин. Если мы посчитаем это, колебания трехфазного асинхронного двигателя переменного тока составляют около 150 об / мин, а бесщеточного двигателя — 12 об / мин (+/- 6 об / мин).
Кроме того, скорость может быть точно установлена в цифровом виде с шагом 1 об / мин. Используйте потенциометр на передней панели драйвера, чтобы легко изменять скорость, затем нажмите, чтобы установить.
Для общего применения достаточно двигателей переменного тока. Однако для более продвинутых приложений, где важны постоянство скорости, меньшая занимаемая площадь или эффективность, хорошо знать, что на рынке есть другое решение.
| Чтобы узнать больше о бесщеточных двигателях и других типах технологий управления скоростью, пожалуйста, прочтите наш официальный документ. |
Регулировка скорости для снижения затрат на энергию
| ОБЗОР Поскольку производители продолжают бороться с повышением эксплуатационных расходов и стремлением снизить потребление энергии, преобразователи частоты (VFD) становятся популярным решением.Помимо финансовой экономии в результате значительного снижения использования электроэнергии и общего энергопотребления, могут быть реализованы и другие преимущества. В этом техническом документе основное внимание будет уделено многочисленным преимуществам регулирования скорости двигателя в решениях для контроля сварочного дыма с использованием частотно-регулируемых приводов. |
Контроль сварочного дыма
Дуговая сварка безопасна, если приняты достаточные меры для защиты от потенциальных опасностей.Сварочный дым содержит соединения металлов, которые могут представлять опасность для здоровья, если их не контролировать должным образом, поэтому важно принимать соответствующие меры безопасности.
Агентство по охране окружающей среды (EPA) имеет требования по контролю за выбросами металлических соединений. Вы должны реализовать одно или несколько из следующего:
• Используйте сварочный процесс с уменьшенными возможностями образования дыма
• Используйте вариации процесса сварки, которые могут снизить скорость образования дыма
• Используйте сварочные присадочные материалы, защитные газы, газы-носители или другие процессы для уменьшения образования сварочного дыма
• Оптимизация параметров процесса сварки для уменьшения количества сварочных работ
• Использование системы улавливания и контроля сварочного дыма
Существует множество портативных, стационарных и технических решений для контроля сварочного дыма.Поскольку на работу оборудования для контроля сварочного дыма влияют различные факторы, в том числе правильное использование и размещение оборудования, техническое обслуживание оборудования, а также конкретная процедура сварки и применение, важно связаться со специалистом, чтобы определить, какое решение лучше всего подходит для вашего случая.
Частотно-регулируемые приводы
Использование решения по контролю сварочного дыма не только помогает вам соответствовать требованиям безопасности и защиты окружающей среды, но и регулирование скорости двигателя с помощью частотно-регулируемого привода может также существенно снизить потребление электроэнергии и общее энергопотребление.ЧРП известен под разными названиями, такими как инвертор, частотно-регулируемый привод (VSD), преобразователь частоты или привод переменного тока. По сути, все они означают одно и то же; электронный контроллер, который регулирует скорость электродвигателя, регулируя подаваемую мощность. Способ управления скоростью двигателя заключается в изменении частоты переменного тока на входе. ЧРП обеспечивают непрерывный контроль, позволяя вам контролировать производительность оборудования в соответствии с потребностями операции.
Возможная экономия Вентиляторное оборудование для удаления дыма часто используется без регулирования скорости.Вместо этого поток традиционно регулируется дросселированием с помощью клапана или демпфера. Когда поток регулируется без регулирования скорости двигателя, двигатель вентилятора постоянно работает на полной скорости. Поскольку системы контроля сварочного дыма редко требуют максимального потока, система, работающая без контроля скорости, тратит значительное количество энергии и, следовательно, денег на протяжении большей части своего рабочего времени. |
В дополнение к регулированию скорости , Частотно-регулируемые приводы обеспечивают плавный пуск, постепенно увеличивая рабочую скорость двигателя при запуске.Это не только помогает продлить срок службы оборудования за счет уменьшения механических нагрузок и провалов напряжения, но и сокращает объем технического обслуживания.
ЧРП могут повысить уровень комфорта сотрудников, регулируя воздушный поток по всему объекту и уменьшая шум, создаваемый вентиляторами и насосами.
Взаимодействие Двигатель VFD
Чтобы получить максимальную производительность от каждого двигателя, вам необходимо изучить характеристики двигателя, поскольку на них влияют различные сопротивления катушек, а также сопротивление статора и ротора.Все эти различные параметры должны распознаваться только частотно-регулируемым приводом с возможностью автоматической адаптации двигателя (ААД). Когда двигатель экранирован частотно-регулируемым приводом, можно использовать идеальное выходное напряжение в каждом состоянии, чтобы двигатель работал с максимальной эффективностью, также известной как точка максимальной эффективности (BEP). Определение BEP двигателя может обеспечить повышение КПД на 3-4 процента и, следовательно, снижение потребления энергии.
После определения BEP вы можете увидеть, как можно сэкономить при использовании частотно-регулируемого привода. Обратите внимание, что зависимость между оборотами крыльчатки вентилятора и потребляемой мощностью куба.
Когда вы используете двигатель на полной скорости, потребляемая мощность будет 100%, но если вы запустите двигатель на 80% от его об / мин, мощность будет оценена в 0,8 x 0,8 x 0,8 = 51,2% от потребляемой мощности. . См. Рисунок ниже.
Идеальное энергопотребление при переменной скорости
Помимо экономии при работающем вентиляторе, вам также необходимо учитывать пусковой ток, индуцируемый двигателями при запуске. Эти пусковые токи, которые намного превышают ток, потребляемый двигателем, потребуют больших размеров кабеля и предохранителей.При обычном прямом пуске пусковой ток может в восемь раз превышать ток, который используется двигателем при нормальной работе. Однако этот высокий ток понадобится только на короткое время. Нам по-прежнему необходимо учитывать это при выборе периферийного оборудования, используемого с двигателем. На изображении ниже ЧРП не превышает номинальный ток при запуске (например, вентилятор SF 1200, двигатель 7,5 кВт при 380 В 50 Гц с IN 14 А может быть защищен предохранителями 3x16A).
Пусковые токи при различных способах пуска
Государственные скидки и льготы
В дополнение к перечисленным выше преимуществам, экономия затрат также может быть достигнута за счет государственных скидок и финансовых стимулов, если таковые имеются.
• Скидки — используйте дополнительную экономию за счет государственных скидок на энергоэффективные покупки. Посетите www.energy.gov или www.energystar.gov для получения информации о скидках в вашем регионе.
• Реагирование на спрос — инициативы по реагированию на спрос помогают снизить спрос на электроэнергию в часы пик, чтобы предотвратить нагрузку на вашу систему. Например, производители могут получить финансовые стимулы за сокращение потребления энергии в жаркие летние дни.
• Бенчмаркинг — ENERGY STAR соответствует стандарту U.S. Добровольная программа Агентства по охране окружающей среды, которая помогает предприятиям и частным лицам экономить деньги и защищать наш климат за счет высочайшей энергоэффективности. Посещение www.energystar.gov для получения подробной информации.
ЗАКЛЮЧЕНИЕ
Реализация ожидаемой экономии энергии начинается с обеспечения того, чтобы приложение работало в течение значительного количества времени в процентном соотношении, которое значительно меньше, чем полная производительность. При рассмотрении установки ЧРП примите во внимание ваш график работы, а также тип, размер и возраст оборудования на вашем предприятии.
% PDF-1.3 % 62 0 объект > эндобдж xref 62 42 0000000016 00000 н. 0000001205 00000 н. uCϑq
Как повысить эффективность электродвигателей
Первый промышленный электродвигатель, вероятно, считался прорывом в свое время, даже несмотря на то, что было много возможностей для улучшения.По мере развития технологий производители двигателей разработали более совершенные двигатели, которые потребляют меньше энергии и требуют меньших затрат. Хотя для производителей вполне естественно использовать новейшие технологии при создании электродвигателей, возможности для дальнейшего совершенствования методов производства сыграли важную роль в повышении эффективности этих двигателей.
Рассмотрим следующую статистику:
- В 2015 году мировой рынок электротехники оценивался в более чем 70 миллиардов долларов и, как ожидается, будет расти со среднегодовыми темпами роста (CAGR) в 4 раза.2 процента с 2017 по 2025 год.
- По оценкам, к 2035 году мировое потребление электроэнергии достигнет 35 триллионов киловатт-часов, и почти 28 процентов будут использоваться электродвигателями.
- Девяносто процентов установленных двигателей работают непрерывно на полной скорости и используют механические системы для регулирования мощности.
Будущее определенно выглядит многообещающим!
Прежде чем перейти к изучению эффективности электродвигателей, важно больше узнать об общих двигателях, используемых в промышленности.
Простой двигатель постоянного тока преобразует электрическую энергию постоянного тока в механическую. Обычно он оснащен большим количеством катушек, что делает его эффективным. Тем не менее, это может привести к большим потерям энергии из-за трения между коллектором и щетками, а также потери крутящего момента при определенных углах. Кроме того, если двигатель застрянет при попытке поднять тяжелый груз, катушки ротора могут легко перегреться и расплавиться. Вот почему в ряде промышленных и тяжелых бытовых приборов используются электродвигатели.
Как производители могут экономить электроэнергию с помощью электродвигателей
Конструкция электродвигателя и способ его использования являются двумя определяющими факторами, которые помогают экономить электроэнергию. Давайте сначала посмотрим на аспект дизайна.
Использование медных обмоток в обмотках статора
Что касается проводимости двигателя, всегда лучше использовать медные катушки, чем устаревшие алюминиевые. Это потому, что проводимость алюминия ниже, чем у меди.Чтобы не отставать от медных катушек, алюминиевые магнитные провода могут нуждаться в большем поперечном сечении, чтобы обеспечить такой же уровень проводимости. Обмотки, намотанные алюминиевой проволокой, могут иметь больший объем по сравнению с двигателем того же размера с медной проволокой.
Если вы все еще используете алюминиевые обмотки, убедитесь, что концы алюминиевого магнитного провода правильно подключены. Алюминий окисляется намного быстрее, чем другие металлы, и если алюминиевый порошок подвергается воздействию воздуха, он полностью окисляется всего за несколько дней и оставляет после себя тонкий белый порошок.
Чтобы обеспечить правильное соединение, обеспечивающее хорошую проводимость, оксидный слой алюминиевого магнита необходимо проткнуть, чтобы предотвратить дальнейший контакт алюминия с воздухом.
Конечно, достижение КПД двигателя — это больше, чем просто выбор между алюминиевой и медной обмотками. Некоторые производители разработали обжимные соединители с прокалкой под высоким давлением для повышения эффективности. Это было сделано для того, чтобы алюминиевые обмотки не отставали от своих медных аналогов.Хотя двигатели с алюминиевыми обмотками могут сравниться по мощности с медными, это требует времени и денег. Алюминий также требует большего количества витков и провода большего диаметра, что не всегда может быть экономичным.
Если двигатель должен работать время от времени или непродолжительное время, и когда эффективность и объем не имеют значения, использование алюминиевых магнитных проводов может иметь смысл. В противном случае всегда следует отдавать предпочтение медным обмоткам.
Использование медных стержней в роторе
Когда дело доходит до роторов, медь также дает преимущество в эффективности.Медные роторы предпочтительны для энергоэффективных производств в развитых и развивающихся странах, где электричество часто бывает дефицитным и дорогостоящим. Медные роторы — лучший выбор по сравнению с алюминиевыми с точки зрения качества двигателя, надежности, стоимости, эффективности и срока службы.
Прецизионная обработка движущихся деталей
Обработка влечет за собой удаление материала из секционного блока до очень переносимого вещества. Прецизионное оборудование необходимо для достижения высочайшего допуска при наименьшей измеримой степени.Будь то резка металла или добыча угля, прецизионное оборудование может обеспечить точность, необходимую для производства материалов в желаемых количествах. Движущиеся части машины потребуют своевременного обслуживания для максимальной производительности и эффективности. Техническое обслуживание должно выполняться только специалистами, при этом должен требоваться осмотр всех частей.
Использование высококачественной стали для роторов и статоров
Высокотехнологичная электротехническая сталь необходима для производства экономичных статоров и роторов, используемых во множестве электродвигателей.Этот тип стали обеспечивает высокую магнитную проницаемость и низкие потери мощности для первоклассных характеристик. Однако потери мощности в электротехнической стали все же могут возникать. Вихревые токи, также называемые токами Фуко, вступают в игру, когда магнитное поле изменяется. Прокатка стали до более тонкой толщины контролирует эти вихревые токи и снижает потери тока. Это особенно верно для прикладных частот, превышающих стандартные 50 или 60 герц.
Сохранение ротора и статора как можно ближе друг к другу
Благодаря точности изготовления производители могут удерживать ротор и статор как можно ближе друг к другу, не касаясь друг друга.Когда скорость вращения достигает нескольких тысяч оборотов в минуту, электротехническая сталь в роторе может испытывать огромные нагрузки. Высокое напряжение особенно ощущается в областях вблизи пазов для магнитов, где узкое оборудование удерживает магниты на месте.
В асинхронных двигателях передача энергии происходит через воздушный зазор между статором и двигателем. Воздушный зазор необходим для минимизации сопротивления. Небольшой воздушный зазор приведет к меньшим потерям энергии и повышению эффективности.Общая магнитная связь между статором и ротором увеличивается по мере уменьшения воздушного зазора. Более высокая потокосцепление приводит к уменьшению потерь энергии и повышению эффективности. Меньший зазор также помогает избежать шума.
Больше катушек делают двигатели более эффективными
Провода в фазных обмотках двигателей малой мощности тоньше. Однако количество витков катушки должно быть большим, чтобы увеличить магнитодвижущую силу или плотность тока. Сопротивление фазных обмоток и плотность потерь мощности также выше, чем у двигателей большой мощности.Следовательно, маломощные двигатели с высокими скоростями потребуют большей магнитодвижущей силы. Это означает, что потребуется больше катушек и большее количество витков с тонким проводом, который обеспечивает более высокую плотность тока.
Использование частотно-регулируемых приводов
Приводы с регулируемой скоростью (VSD) или приводы с регулируемой скоростью — это тяжелые промышленные электродвигатели. Их скорость можно регулировать с помощью внешнего контроллера. Эти приводы используются для управления технологическим процессом, поскольку они помогают экономить энергию на предприятиях, где используется множество электродвигателей.
VSD обычно используются в качестве энергосберегающих насосов и вентиляторов, поскольку они улучшают технологические операции, особенно там, где необходимо регулирование потока. Они также обеспечивают возможность плавного пуска, что снижает электрические напряжения и провалы напряжения в сети, которые обычно наблюдаются при пусках двигателей под напряжением, особенно при работе с высокоинерционными нагрузками.
Как пользователи электродвигателей могут обеспечить эффективность
Как упоминалось ранее, то, как электродвигатели используются производителями, промышленными предприятиями и домовладельцами, будет определять их эффективность.Ниже приведены некоторые конкретные шаги, которые пользователи могут предпринять для обеспечения эффективности и долговечности двигателя:
Использование интеллектуальных двигателей с соответствующим пускателем / контроллером двигателя
Хотя интеллектуальные двигатели широко используются и доступны, крайне важно выбрать наиболее подходящий вариант, чтобы свести к минимуму время простоя, повысить эффективность и снизить затраты. Инженеры-производственники знают, какое бремя потребления электроэнергии двигателями может сказаться на их эксплуатационных расходах. Чтобы смягчить это, они часто используют технологии управления двигателями, которые используют только необходимое количество энергии для запуска двигателей, выявления диагностических данных и сокращения времени простоя.По мере того как пускатели двигателей становятся все более популярными, технология пускателей двигателей также приобретает все большее значение.
Ниже приведены несколько важных вопросов, которые необходимо рассмотреть, прежде чем принимать решение о потенциальных областях применения электродвигателей:
Будет ли приложение требовать управления скоростью, даже если двигатель работает на определенной скорости?
Требования к контролю скорости должны быть определены как можно раньше. Некоторые устройства плавного пуска имеют ограниченное управление низкой скоростью между пуском и остановкой.Важно помнить, что рабочая скорость двигателя не может быть изменена, потому что устройство плавного пуска регулирует только напряжение двигателя, а не частоту.
Потребуется ли приложению определенное время запуска и остановки?
Обычно время пуска и останова устройств плавного пуска зависит от нагрузки. Внутренние алгоритмы регулируют напряжение на основе заранее запрограммированного времени, чтобы увеличить ток и крутящий момент для запуска двигателя и / или уменьшить их, чтобы остановить его.Если нагрузка небольшая, двигателю может потребоваться меньше времени для запуска, чем запрограммированное значение. В устройствах плавного пуска нового поколения используются усовершенствованные алгоритмы, позволяющие добиться более точного и менее зависимого от нагрузки времени пуска и останова.
Потребуется ли приложению полный крутящий момент без скорости?
ЧРП могут лучше всего работать с приложениями, требующими полного крутящего момента при нулевой скорости. Они могут создавать номинальный крутящий момент двигателя от нуля до номинальной скорости и даже обеспечивать полный крутящий момент без скорости.С другой стороны, устройства плавного пуска обычно работают в диапазоне частот от 50 до 60 Гц, а полный крутящий момент может быть достигнут только при полном напряжении. Начальный крутящий момент (доступный при нулевой скорости) обычно находится в диапазоне от нуля до 75 процентов и может быть запрограммирован.
Потребуется ли в приложении постоянный крутящий момент?
Устройства плавного пуска изменяют напряжение для управления током и крутящим моментом. Во время запуска ток изменяется в зависимости от напряжения, в то время как крутящий момент двигателя изменяется как квадрат приложенного напряжения.Крутящий момент может не оставаться постоянным при различных приложенных напряжениях, условие, которое может усложняться при изменении нагрузок.
Некоторые устройства плавного пуска работают по алгоритмам управления крутящим моментом, но это не обязательно связано с постоянным крутящим моментом. Однако во время ускорения частотно-регулируемые приводы используют разные частоты двигателя при изменении напряжения. Режим управления VFD определяется с точки зрения постоянного напряжения на герц и обеспечивает постоянный крутящий момент.
Каковы стоимость, размер и тепловые характеристики?
При силе тока менее 40 ампер устройства плавного пуска могут предложить небольшую экономическую выгоду по сравнению с частотно-регулируемыми приводами.По мере увеличения силы тока и мощности стоимость частотно-регулируемых приводов увеличивается быстрее, чем стоимость устройств плавного пуска, и может достигать экстремальных значений при высоких значениях силы тока.
Что касается размера, устройства плавного пуска имеют преимущество перед частотно-регулируемыми приводами при любой силе тока благодаря своей конструкции. По мере увеличения тока и мощности разница может увеличиваться. Когда устройства плавного пуска объединены с внутренним или внешним электромеханическим байпасом, они еще более эффективны и могут выделять меньше тепла. Это связано с тем, что устройства плавного пуска имеют меньше активных компонентов в цепи в режимах запуска, работы и останова.
Что следует учитывать при установке и гармониках?
Проблемы, связанные с установкой, можно разделить на стоимость, размер, температуру и качество электроэнергии. Установки плавного пуска требуют меньших размеров и меньших затрат, поэтому они не вызывают особого беспокойства.
Кроме того, гармоники устройства плавного пуска меньше, чем у частотно-регулируемых приводов. Длинные кабели для частотно-регулируемых приводов требуют большего внимания, чем для устройств плавного пуска. Кроме того, для устройств плавного пуска могут не потребоваться специальные типы проводов.Электромагнитная совместимость также не может быть учтена.
Прекратите использование двигателей, если в этом нет необходимости
Как бы просто это ни звучало, наиболее эффективный способ экономии энергии — выключать двигатель, когда он не используется. Чаще всего пользователи не решаются выключить двигатель, потому что считают, что его многократный запуск приведет к значительному износу. Один из способов смягчить это — использовать устройства плавного пуска, которые могут снизить износ.Правильно установленное и специально подобранное устройство плавного пуска также может снизить нагрузку на механические и электрические системы.
Снижение износа
Снижение износа двигателя — одна из основных задач пользователей. При запуске электродвигателя происходит значительный износ, так как высокие начальные токи и силы создают давление в механических и электрических системах. Хотя это может быть вредным, повреждающие эффекты можно контролировать с помощью устройств плавного пуска.Вы также можете использовать VSD, но они могут быть менее эффективными и дорогостоящими.
Использование высокоэффективных двигателей
Эффективность двигателя может быть получена из двух факторов: размера двигателя и качества его эффективности. В частности, для двигателей меньшего размера размер является важным фактором, влияющим на эффективность. Для более мощных двигателей большее значение имеют классы эффективности.
Энергоэффективные двигатели потребляют меньше электроэнергии, не так легко нагреваются и служат дольше.Эти типы двигателей отличаются улучшенной конструкцией, что приводит к меньшим потерям тепла и меньшему шуму. Использование высококачественных материалов, более жестких допусков и улучшенных технологий производства также помогает снизить потери и повысить эффективность.
Чтобы оценить преимущества высокоэффективных двигателей, вы должны сначала определить «эффективность» электродвигателя. Это может быть определено отношением механической мощности, выдаваемой двигателем (выход), к электрической мощности, подаваемой на двигатель (вход).Следовательно, КПД = (выходная механическая мощность / потребляемая электрическая мощность) x 100 процентов.
Таким образом, если двигатель эффективен на 80 процентов, он может преобразовывать 80 процентов электрической энергии в механическую. Остальные 20 процентов электроэнергии теряется в виде тепла.