Принцип Действия Двигателя Постоянного Тока: Что Нужно Знать
Мощный двигатель постоянного тока
Тема нашей сегодняшней статьи — принцип действия электродвигателя постоянного тока. Если вы бываете на нашем сайте, то наверняка уже знаете, что эту тему мы решили раскрыть более полно и понемногу разбираем все разновидности электромотором и электрогенераторов.
Постоянный ток известен человечеству вот уже где-то 200 лет, эффективно применять его научились немного позже, а вот сегодня трудно себе представить деятельность человека, где бы энергия не применялась. Приблизительно таким же образом происходила и эволюция электрических двигателей.
Немного истории и теории
Первые электрические двигатели
Бурное развитие электротехники не прекращается с момента зарождения этого направления в физике. Первыми разработками, связанными с электрическими моторами, были работы многих ученых в 20-х годах 19-го столетия. Изобретали всяких мастей пытались соорудить механические машины, способные превращать электрическую энергию в кинетическую.
- Особую значимость имеют исследования М. Фарадея, который в 1821 году, проводя эксперименты по взаимодействию тока и разных проводников, выяснил, что проводник может вращаться внутри магнитного поля, ровно как вокруг проводника может вращаться и магнит.
- Второй этап развития занял более значительный отрезок времени от 1830-х до 1860-х годов. Теперь, кода основные принципы преобразования энергии человеку были известны, он пытался создать наиболее эффективную конструкцию двигателя с вращающимся якорем.
- В 1833 году американский изобретатель и по совместительству кузнец Томас Девенпорт смог построить первый роторный двигатель, работающий на постоянном токе, и сконструировать модель поезда, приводимую им в движение. На свою электрическую машину он получил патент спустя 4 года.
Б.С. Якоби
- В 1834 году Борис Семенович Якоби, русско-немецкий физик и изобретатель, создает первый в мире электродвигатель постоянного тока, в котором смог таки реализовать основной принцип работы таких машин, применяемый и сегодня – с постоянно вращающейся частью.

- В 1838 году, 13 сентября был произведен пуск настоящей лодки по Неве с 12-ю пассажирами на борту – так происходили полевые испытания двигателя Якоби. Лодка двигалась со скоростью 3 км\ч против течения. Привод двигателя был соединен с лопастными колесами по бокам, как на пароходах того времени. Электрический ток подавался к агрегату от батареи содержащей 320 гальванических элементов.
Лодка с лопастными колесами
Результатом проведенных испытаний стала возможность формирования основных принципов дальнейшего развития электромоторов:
- Во-первых, стало ясно, что расширение сферы их применения напрямую зависит от удешевления способов получения электрической энергии – требовался надежный и недорогой генератор, а не дорогостоящие на тот момент гальванические батареи.
- Во-вторых, требовалось создать достаточно компактные двигатели, которые бы, однако, обладали большим коэффициентом полезного действия.
- И в третьих – были очевидны преимущества двигателей с вращающимися неоднополюсными якорями, с постоянным вращающимся моментом.

Работа шунтового генератора
Затем наступает третий этап развития электромоторов, который ознаменован открытием явления самовозбуждения двигателя электрического тока, после чего был сформирован принцип обратимости таких машин, то есть двигатель может быть генератором, и наоборот. Теперь для того чтобы запитать двигатель начали применять недорогие генераторы тока, что в принципе делается и сегодня.
Интересно знать! Любая электрическая сеть подключена к электростанции, вырабатывающей ток. Сама станция, по сути, и есть набор мощнейших генераторов, приводимых в движение разными способами: течение реки, энергия ветра, ядерные реакции и прочее. Исключение составляют, разве что, фотоэлементы в солнечных батареях, но это уже другая, дорогая, пока не нашедшая достаточного распространения история.
Вид современной конструкции электродвигатель приобрел в далеком 1886 году, после чего в него вносились только доработки и усовершенствования.
Основные принципы функционирования
Двигатели постоянного тока и принцип действия: вспоминаем школьные уроки физики
В основу любого электрического двигателя положен принцип магнитного притягивания и отталкивания. В качестве эксперимента можете провести такой простейший опыт.
В качестве эксперимента можете провести такой простейший опыт.
- Внутрь магнитного поля нужно поместить проводник, по которому нужно пропустить электрический ток.
- Для этого удобнее всего пользоваться магнитом в форме подковы, а в качестве проводника подойдет медная проволока подключенная концами к батарейке.
- В результате опыта вы увидите, что проволоку вытолкнет из области действия постоянного магнита. Почему это происходит?
- Дело в том, что при прохождении тока через проводник, вокруг последнего создается электромагнитное поле, которое вступает во взаимодействие с уже имеющимся, от постоянного магнита. Как результат этого взаимодействия, мы видим механическое движение проводника.
- Если говорить более подробно, то выглядит это так. Когда круговое поле проводника вступает во взаимодействие с постоянным от магнита, то сила магнитного поля с одной стороны возрастает, а с другой уменьшается, из-за чего провод выталкивает из области действия магнита под углом 90 градусов.

Занимательная физика
- Направление, в котором вытолкнет проводник можно установить по правилу левой руки, которое применимо только к электродвигателям. Правило гласит следующее – левую руку нужно поместить в магнитное поле так, чтобы его силовые линии входили в нее с ладони, а 4 пальца были направлены по ходу движения положительных зарядов, тогда отведенный в сторону большой палец покажет направление воздействующей на проводник движущей силы.
Эти простые принципы двигателя постоянного тока применяется и поныне. Однако в современных агрегатах вместо постоянных магнитов применяют электрические, а рамки заменяют сложные системы обмоток.
Строение двигателя
Двигатель постоянного тока и устройство
Давайте теперь более подробно разберем, как устроен двигатель постоянного тока, какие в нем имеются детали и как они взаимодействуют друг с другом.
Продолжение теории
Сконструировать простейший двигатель постоянного тока вы легко сможете своими руками. Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
Инструкция такова, что достаточно соорудить прямоугольную рамку из проводника, способную вращаться вокруг центральной оси.
- Рамка помещается в магнитное поле, после чего на ее концы подается постоянное напряжение, от той же батарейки.
- Так только по рамке начинает течь ток, она приходит в движение, пока не займет горизонтальное положение, называемое нейтральным или «мертвым», когда воздействие поля на проводник равно нулю.
- По идее, рамка должна остановиться, но этого не произойдет, так как она пройдет «мертвую» точку по инерции, а значит, электродвижущие силы снова начнут возрастать. Но из-за того, что ток теперь течет в обратном направлении относительно магнитного поля, будет наблюдать сильный эффект торможения, что несопоставимо с нормальной работой двигателя.
- Чтобы процесс протекал нормально нужно предусмотреть такую конструкцию подключения рамки к питанию, при которой в момент прохождения тока через нулевую точку будет происходить переключение полюсов, а значит, относительно магнитного поля ток потечет в прежнем направлении.

В качестве такого устройства применяется коллектор, состоящий их изолированных пластин, но давайте поговорим о нем чуть позже.
В виде альтернативы можно изготовить такую рамку, что показана на фото выше. Ее отличие в том, что по двум контурам рамки ток протекает в одном направлении, что позволяет избавиться от коллектора, однако такой электромотор крайне неэффективен, из-за постоянно воздействующих тормозящих сил.
Получив вращение ротора, к нему можно приладить привод и дать сопоставимую мощности двигателя нагрузку, получая тем самым работающую модель.
Строение электромотора постоянного тока
Каково устройство электродвигателя постоянного тока
Итак, переходим к строению двигателей:
- Статор или индуктор – неподвижная часть двигателя, представляющая собой деталь, создающую постоянное электромагнитное поле. Состоит статор из сердечника, выполненного из тонколистовой стали (из пластин определенного профиля набирается деталь нужного размера) и обмотки.

Принцип действия и устройство двигателя постоянного тока: статор
- Обмотка укладывается в пазы сердечника определенным образом, формируя основные и добавочные магнитные полюса, естественно, при включении в сеть.
- Обмотка возбуждения находится на главных полюсах, тогда как на добавочных она служит для улучшения коммутации – увеличивает эффективность мотора, его КПД.
Якорь двигателя постоянного тока
- Ротор двигателя, являющийся тут якорем, тоже имеет похожее строение, но отличает его, прежде всего то, то данный узел двигателя является подвижным. Именно он заменяет вращающуюся рамку из примеров, рассмотренных выше.
- Витки обмотки якоря изолированы друг от друга и соединяются с контактными пластинами коллектора, через которые и подается питание.
- Все части ротора закреплены на металлическом валу, который является центральной осью вращения двигателя. К нему же и подключается привод, передающий крутящий момент на внешние механизмы.

Вид коллектора
- Коллектор (полосатый цилиндр, насаженный на вал) соединен с питающей сетью через щетки, которые выполняются чаще всего из графита. Вообще строение коллектора таково, что контактные пластины также изолированы, что позволяет эффективно менять направление тока в цепи, чтобы избегать торможения двигателя.
- Сами щетки имеют скользящий контакт с пластинами коллектора, и удерживаются в одном положении при помощи щеткодержателей. Поддерживать постоянное напряжение контакта (а ведь мы знаем, что щетки истираются и истончаются) помогают пружины.
Графитовые щетки
- Щетки соединены медными проводами с питающей сетью. Дальше начинается внешняя схема электропитания и управления, о которой мы поговорим немного позже.
Валовый подшипник качения
- Следом за коллектором на валу располагается подшипник качения, обеспечивающий плавное вращение. Сверху он защищен специальным полимерным кольцом, защищающим его от пыли.

Совет! Одной из частых поломок электрических двигателей, является выход из строя подшипника. Если вовремя не заменить этот небольшой элемент конструкции, то запросто можно спалить весь двигатель.
- С обратной стороны обмотки, на том же валу, располагается крыльчатка, поток воздуха от которой эффективно охлаждает двигатель.
- Следом за крыльчаткой обычно крепится привод, отличающийся параметрами, в зависимости от назначения агрегата, в котором двигатель постоянного тока установлен.
В принципе, на этом все. Как видите, конструкция достаточно проста, и что немаловажно, очень эффективна.
Особенности коллекторных двигателей
Перфоратор в разрезе: такие двигатели универсальны и могут работать как от постоянного, так и от переменного тока, но только при соответствующем подключении
Вообще коллекторный двигатель – это действительно хорошее устройство. Такие агрегаты легчайшим образом поддаются регулировке. Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Повысить, опустить обороты – не проблема. Дать четкий крутящий момент или жесткую механическую характеристику – запросто.
Однако, несмотря на ряд неоспоримых преимуществ, двигатель имеет повышенную сложность сборки, относительно двигателей переменного тока с самовозбуждающимся ротором или других бесколлекторных агрегатов, а также меньшую надежность. И вся загвоздка состоит в этом самом коллекторе.
- Этот узел достаточно дорог, а цена его ремонта иной раз сопоставима с новой деталью, если вообще возможность восстановления имеется.
- Он забивается при работе токопроводящей пылью, что со временем может стать причиной выхода из строя всего двигателя.
- Коллектор искрит, создавая при этом помехи, а при высокой нагрузке так и вовсе может полыхнуть, создавая круговой огонь. В таком случае его закоротит дугой, что несовместимо с жизнью двигателя.
Выше мы уже сказали, что его задача менять направление тока в витках обмотки, а теперь хотим разобрать вопрос подробнее.
Все гениальное просто
- Итак, по сути, данная часть ротора служит выпрямителем тока, то есть переменный ток становится, проходя через него, постоянным, что справедливо для генераторов, или меняет направление тока, если речь идет о двигателях.
- В случае рассмотренного выше примера с вращающейся в магнитном поле рамкой, требовался коллектор, состоящий из двух изолированных полуколец.
- Концы рамки подключаются к разным полукольцам, что не позволяет цепи накоротко замкнуться.
- Как мы помним, коллектор контактирует с щетками, которые установлены таким образом, чтобы они одновременно не контактировали друг с другом и меняли полукольца при прохождении рамкой нулевой точки.
Работа коллектора
Все предельно просто, однако такие двигатели и генераторы не могут быть нормальной мощности в силу конструктива. В результате якорь стали делать с множеством витков, чтобы активные проводники всегда находились максимально близко к полюсам магнита, ведь, вспоминая закон электромагнитной индукции, становится ясно, что именно это положение самое эффективное.
Раз увеличивается количество витков, значит, требуется разбить коллектор на большее число частей, что собственно и является причиной сложности изготовления и дороговизны этого элемента.
Альтернатива коллекторному двигателю
Бесщеточный двигатель постоянного тока
В электронике уже давно царит век полупроводников, что позволяет изготавливать надежные и компактные микросхемы. Так зачем же мы до сих пор пользуемся коллекторными двигателями? А действительно?
- Инженеры тоже не оставили вопрос незамеченным. В результате коллектор сменили силовые ключи, дополнительно в конструкции появились датчики, регистрирующие текущее положение ротора, чтобы система автоматически определяла момент переключения обмотки.
- Как мы помним, нет никакой разницы, двигается ли магнит относительно проводника, либо же это происходит наоборот. Поэтому якорем становится статор, а на роторе располагается постоянный магнит или простейшая обмотка, соединенная с питанием через контактные кольца, который вращать внутри конструкции намного проще.

Контактные кольца в простейшем генераторе переменного тока
- Строение контактных колец чем-то напоминает коллектор, однако они намного надежнее и изготавливать их в условиях производства проще.
В итоге получился новый тип двигателя, а именно бесщеточный двигатель постоянного тока aka BLDC. Устройству доступны те же преимущества, что и коллекторному двигателю, но от надоедливого коллектора мы избавляется.
Однако такие двигатели применяются только в дорогих аппаратах, тогда как простая техника, например соковыжималка или тот же перфоратор будут рентабельнее в производстве, если ставить на них уже классические коллекторные модели двигателей.
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Совет! Если сделать одновременно обе эти манипуляции, то с двигателем ничего не произойдет, и он продолжит вращаться в том же направлении, что и ранее.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.

- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
- Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.
Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.

- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Трёхфазный бесколлекторный двигатель
1. Двигатель стиральной машины с прямым приводом
Пожалуй уже каждый слышал о стиральных машинах с прямым приводом барабана. Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Но до сих пор, даже не все специалисты по ремонту стиральных машин знают как устроен и как работает двигатель в такой машине.
Сама идея конечно не новая, ведь за основу взят шаговый двигатель, который уже давно получил распространение во многих электротехнических устройствах. А вот первое применение его в конструкции стиральной машины в качестве привода барабана, принадлежит корейскому концерну LG. С середины 2005 года, компания LG начала активно продвигать свою продукцию, заявляя о 10-ти летней гарантии на двигатель для стиральных машин с прямым приводом.
Сегодня, помимо LG, компании Samsung, Haier и Whirpool в ряде моделей стиральных машин стали применять подобные двигатели. Забегая вперёд, можно сказать, что компания LG не просчиталась и двигатель для прямого привода барабана действительно довольно надёжный и имеет преимущество по сравнению с более традиционным и распространённым коллекторным двигателем.
2. Устройство двигателя
Двигатель стиральной машины с прямым приводом, представляет собой трёхфазный бесколлекторный двигатель постоянного тока, отчасти похожий на шаговый двигатель, но это не совсем так. В иностранной литературе его ещё часто называют BLDC (Brushless Direct Current Motor — бесщёточный мотор постоянного тока), для удобства мы тоже будем применять эту аббревиатуру.
В иностранной литературе его ещё часто называют BLDC (Brushless Direct Current Motor — бесщёточный мотор постоянного тока), для удобства мы тоже будем применять эту аббревиатуру.
Такой двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Различают два вида подобных двигателей:
Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. В стиральных машинах с прямым приводом применяется Outrunner тип двигателя.
В этой статье мы ознакомим с устройством двигателя от стиральной машины LG.
3. Ротор
Рис.2 Ротор двигателя стиральной машины LG с прямым приводом
Ротор BLDC — вращающаяся часть двигателя (Рис.2) По форме напоминает чашу, к внутренней стороне которой специальным клеем крепятся магниты прямоугольной формы. Магниты всегда имеют чётное количество и установлены с чередованием полюсов. В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора.
В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора.
4. Статор
Рис.3 Статор двигателя стиральной машины LG с прямым приводом
Статор BLDC — неподвижная часть двигателя и крепится к задней части бака стиральной машины (Рис.3) Статор состоит из нескольких листов магнитопроводящей стали заключённый в пластиковый каркас, который служит изолятором. В целом, каркас статора напоминает круг с прямоугольными зубьями. На каждый зуб статора наматывается катушка.
Обмотка трёхфазного бесколлекторного двигателя изготовлена из медной проволоки толщиной 1 мм. Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом.
Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом.
Как известно, в трёхфазных двигателях, обмотки соединяют по схеме звезда или треугольник.
В нашем случае, обмотки статора соединены по схеме звезда, т.е. концы фаз имеют общую точку (Рис.4)
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)
|
Рис. |
Рис.5 Воздействие магнитных сил на ротор |
Рис.6 Распределение магнитных сил в обмотке с несколькими зубьями |
 4 Соединение обмоток по схеме «звезда»
4 Соединение обмоток по схеме «звезда»В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U
Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
5. Система управления трёхфазным двигателем (BLDC)
Стоит отметить, что система управления двигателем BLDC и схема её реализации аналогична схеме управления трёхфазным асинхронным двигателем описанной в другой нашей статье.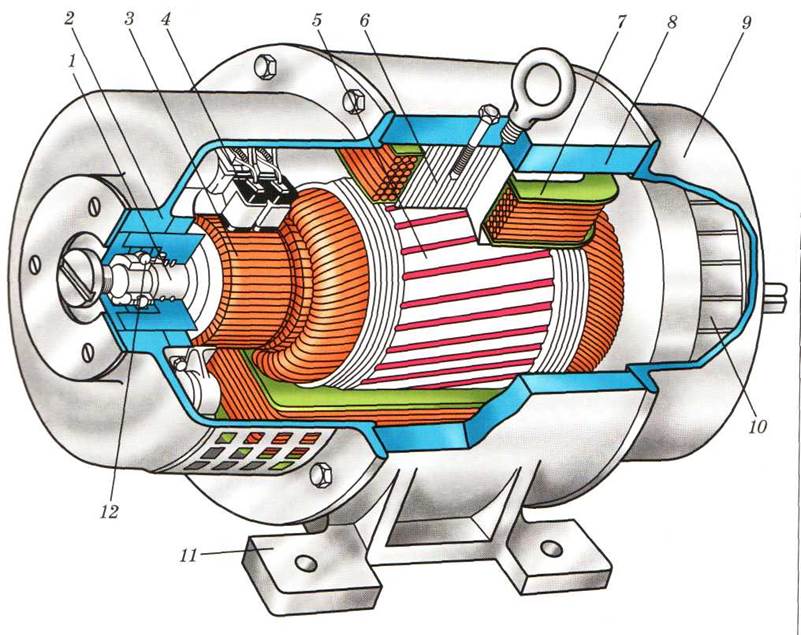 Что бы в точности не повторяться, поясним всё же немного по другому.
Что бы в точности не повторяться, поясним всё же немного по другому.
Управление двигателем с прямым приводом построено на инверторе напряжения с широтно-импульсной модуляцией. Инвертор — (от лат. inverto — поворачивать, переворачивать) — элемент вычислительной схемы, осуществляющий определённые преобразования сигнала изменяемой амплитуды и частоты. К примеру, в инверторе, сетевое напряжение 220 вольт с частотой 50 Гц, преобразуется в постоянное напряжение, а параметры питания обмоток статора двигателя могут колебаться от 0 до 120 вольт с частотой до 300 Гц.
Двигатель постоянного тока имеет три вывода (т.е. три фазы), на которые в разный момент времени подаётся «+» и «-» питания. Это реализуется при помощи IGBT (биполярных транзисторов с изолированным затвором) представляющие электронные силовые ключи, включённые по мостовой схеме (Рис.8)
Рис.8 Условная схема силовой части инвертора и обмоток двигателя подключённых по схеме «звезда»
Замыкая ключ SW1 подаётся «+» на фазу V, а замыкая SW6 подаётся «-» на фазу U. Таким образом, ток потечет от «+» выпрямителя через фазы V и U. Для обеспечения обратного направления, открывается SW5 и SW2. В этом случае ток потечет от «+» выпрямителя через фазы U и V в обратном направлении. При работе двигателя одновреме
Таким образом, ток потечет от «+» выпрямителя через фазы V и U. Для обеспечения обратного направления, открывается SW5 и SW2. В этом случае ток потечет от «+» выпрямителя через фазы U и V в обратном направлении. При работе двигателя одновреме
Коллекторные и бесколлекторные двигатели постоянного тока
Доброго времени суток, дорогие читатели! В предыдущих статьях были рассмотрены электромоторы переменного тока. В этой же статье я расскажу про движки, работающие на постоянном токе. Будет рассмотрено их устройство и, немного, история и принцип работы. Начнем.
Принцип действия двигателя постоянного тока этих машин основывается на эффекте отталкивания одноименных и притягивания разноименных полюсов магнита. Первым такое устройство придумал русский инженер Якоби. В 38-ом году 19-го столетия появилась первая модель промышленного масштаба и, с того времени, больших изменений в конструкции не было.
Коллекторные двигатели постоянного тока
Если брать моторы с небольшой мощностью, то в них обязательно явным образом присутствует один из магнитов (он крепится прямо на корпус машины).
Второй появляется после подачи напряжения на обмотку якоря. С этой целью применяется устройство особого типа, именуемое коллекторно-щеточным узлом. Коллектор является кольцом, проводящим ток, которое крепится на вал мотора. К нему подключаются выводы обмоток якоря.
Для возникновения вращающего момента нужна непрерывная смена полюсов якорного магнита. Это должно выполняться в тот момент, когда якорь проходит через «магнитную нейтраль». Конструктивным образом это выполняется благодаря разделению коллекторного кольца на части (секторы) при помощи непроводящих ток пластин.
Выводы якорных обмоток цепляют к секторам поочередно. Для соединения коллектора и сети питания применяются щетки – стержни из графита с высокой электропроводимостью и маленьким коэффициентом трения по скольжению.
Моторы большой мощности не снабжаются физическими магнитами в силу того, что это сильно утяжелит их конструкцию.
В этих машинах, для создания постоянного магнитного поля, применяют металлические стержни с обмотками, подключаемые к положительной, либо отрицательной шине питания. Полюса одноименного типа подключают один за другим (последовательным образом).
Двигатель может иметь одну, либо четыре пары полюсов. Количество же щеток-токосъемников должно соответствовать числу пар полюсов. У моторов с большой мощностью предусматриваются некоторые конструктивные хитрости. Одна из них заключается в сдвигании щеточного узла на некоторый угол по отношению против вращения после старта мотора и смены нагрузки на нем.
Делается это с целью компенсации эффекта «якорной реакции», который приводит к торможению вала, в результате чего происходит уменьшение эффективности мотора.
Мы рассмотрели двигатели коллекторного типа. Однако кроме них, имеются и устройства не имеющие коллекторов. Движки подобного типа имеют ротор, на котором есть постоянные магниты и статор с обмотками. Существует два вида таких моторов: Inrunner (с магнитами внутри ротора) и Outrunner (у них магниты находятся снаружи, вращаясь вокруг статора, имеющего обмотки).
Движки подобного типа имеют ротор, на котором есть постоянные магниты и статор с обмотками. Существует два вида таких моторов: Inrunner (с магнитами внутри ротора) и Outrunner (у них магниты находятся снаружи, вращаясь вокруг статора, имеющего обмотки).
Машины первого типа, как правило, используются в моторах с высоким числом оборотов и малым числом полюсов. Второй же тип применяют, если требуется заиметь движок с большим моментом и малыми оборотами. По конструкции двигатели Inrunner наиболее просты в силу того, что их статор может, одновременно, служить корпусом, а, значит, на него можно смонтировать устройства для крепления.
У двигателей системы Outrunner вращающейся частью является наружная его часть. Движок крепится за неподвижный вал или другие части статора. Если же такой двигатель используется как мотор-колесо, то крепится он посредством неподвижной оси и заведением проводов статора через его пустотелую ось.
Число полюсов ротора всегда четно. Магниты, используемые в этих движках, обычно имеют прямоугольную форму. Иногда применяются, конечно, магниты цилиндрической формы, но это гораздо реже. Монтируются же магниты так, чтобы их полюса чередовались.
Магниты, используемые в этих движках, обычно имеют прямоугольную форму. Иногда применяются, конечно, магниты цилиндрической формы, но это гораздо реже. Монтируются же магниты так, чтобы их полюса чередовались.
Не всегда случается совпадение количества магнитов и полюсов (может случаться так, что несколько магнитов формируют один полюс).
Размеры устанавливаемых в моторах магнитов различны и зависят они от самого движка и его характеристик. От мощности используемых магнитов зависит то, каким будет момент развиваемой на валу силы.
К ротору магниты крепятся при помощи особого клея (встречаются, конечно, варианты с магнитодержателями, но гораздо реже). Сам ротор может быть изготовлен как из магнитопроводящего материала (сталь), так и из немагнитопроводящего (сплавы алюминия, пластик и пр.), и комбинированным.
Обмотки трехфазных моторов без коллектора наматываются проводом из меди. Провод же используется и одножильный и многожильный. Статоры этих двигателей изготавливают из сложенных листов стали, являющейся магнитопроводящей.
Статор должен иметь столько зубьев, чтобы их количество делилось на количество рабочих фаз. Статор может иметь такое число зубьев, что оно как больше, так и меньше, чем полюсов у ротора.
Наиболее простой движок, имеющий три полюса статора. Однако используется подобная конструкция весьма редко (поскольку, в любой момент времени в работе лишь пара фаз, в результате чего возникает вибрация и перекос). Чтобы избавиться от этих неприятных явлений, делается много полюсов, а обмотки равномерно распределяются между ними. В таком случае не возникает разбалансировки магнитных сил.
Помимо всего прочего, такие моторы могут снабжаться, либо не снабжаться датчиками положения ротора. Датчики, в большинстве своем, работают на принципе эффекта Холла. Они реагируют на магнитные поля и располагаются по статору так, чтобы магниты ротора действовали на них (то есть под углом 120 градусов между собой). Естественно, имеется ввиду 120 электрических градусов.
Датчики могут располагаться и внутри и снаружи двигателя. Вторым способом можно оснащать движки, изначально не имеющие датчиков.
Вторым способом можно оснащать движки, изначально не имеющие датчиков.
Иногда датчики ставят на специальное приспособление, дающее возможность небольшого перемещения датчиков. В то же время, если необходим реверс такого мотора, то устанавливается второй комплект датчиков Холла, настраиваемых на обратное направление вращения.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.
Основы щеточного двигателя постоянного тока| Portescap
ОСНОВА ДЛЯ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Технология Brush DC Portescap основана на конструкции, основанной на безжелезном роторе (самоподдерживающейся катушке) в сочетании с системой коммутации из благородного металла или углерода, меди и редкоземельного магнита или магнита Alnico. Он предлагает явные преимущества для высокопроизводительных приводных и сервосистем: низкое трение, низкое пусковое напряжение, отсутствие потерь в стали, высокий КПД, хорошее тепловыделение, линейная функция крутящего момента-скорости. Все эти факторы облегчают использование и упрощают сервоконтур. Для систем с инкрементальным перемещением, где низкая инерция ротора обеспечивает исключительное ускорение, и для всего оборудования с батарейным питанием, где эффективность является главной проблемой, щеточные электродвигатели постоянного тока предлагают оптимальные решения.
Все эти факторы облегчают использование и упрощают сервоконтур. Для систем с инкрементальным перемещением, где низкая инерция ротора обеспечивает исключительное ускорение, и для всего оборудования с батарейным питанием, где эффективность является главной проблемой, щеточные электродвигатели постоянного тока предлагают оптимальные решения.
КОНСТРУКЦИЯ ДВИГАТЕЛЯ С ЩЕТКОЙ — ТРИ ОСНОВНЫХ УЗЛА
Все двигатели постоянного тока состоят из трех основных узлов:
- статор
- крышка щеткодержателя
- ротор
1.Статор
Статор состоит из центрального и цилиндрического двухполюсного постоянного магнита, сердечника, поддерживающего подшипники, и стальной трубки, замыкающей магнитную цепь. Высококачественные редкоземельные магниты обеспечивают выдающуюся производительность в небольших габаритах. Спеченные подшипники и шариковые подшипники доступны в зависимости от нагрузок и требований вашего приложения.
2. Крышка держателя щеток
Колпачок щеткодержателя изготовлен из пластика.В зависимости от предполагаемого использования двигателя щетка может быть двух разных типов; углеродная или многопроволочная. Типы углерода используют медный графит или серебряный графит и идеально подходят для приложений с инкрементным перемещением, где требуется высокий постоянный и пиковый крутящий момент. Многопроволочный тип использует драгоценный металл и гарантирует низкое пусковое напряжение и повышенную эффективность, что идеально подходит для портативных устройств с батарейным питанием. Инженер Portescap может спроектировать заглушки, которые снижают электромагнитный шум в соответствии с требованиями ЭМС.
3. Ротор
Ротор — это сердце двигателя постоянного тока Portescap. Катушка непосредственно и непрерывно наматывается на цилиндрическую опору, которая позже удаляется, устраняя чрезмерные воздушные зазоры и неактивные головки катушек, которые не вносят вклад в создание крутящего момента. Самонесущая катушка не требует металлической конструкции и, следовательно, обеспечивает низкий момент инерции и отсутствие зазубрин (ротор останавливается в любом положении). В отличие от других традиционных технологий катушек постоянного тока, из-за отсутствия железа нет гистерезиса, потерь на вихревые токи или магнитного насыщения.Двигатель имеет абсолютно линейное поведение скорости и момента, а скорость работы зависит только от напряжения питания и момента нагрузки. Portescap, используя свое собственное ноу-хау, разработала несколько автоматических намоточных машин для различных размеров корпуса и продолжает совершенствовать методы намотки для увеличения выходной мощности.
Самонесущая катушка не требует металлической конструкции и, следовательно, обеспечивает низкий момент инерции и отсутствие зазубрин (ротор останавливается в любом положении). В отличие от других традиционных технологий катушек постоянного тока, из-за отсутствия железа нет гистерезиса, потерь на вихревые токи или магнитного насыщения.Двигатель имеет абсолютно линейное поведение скорости и момента, а скорость работы зависит только от напряжения питания и момента нагрузки. Portescap, используя свое собственное ноу-хау, разработала несколько автоматических намоточных машин для различных размеров корпуса и продолжает совершенствовать методы намотки для увеличения выходной мощности.
Комбинация щеток / коллекторов оптимизирована, чтобы выдерживать длительный срок службы при частоте вращения до 12 000 об / мин и обеспечивать высокую надежность. Продукты Portescap DC могут обеспечивать крутящий момент в диапазоне от 0.От 6 мНм до 150 мНм в непрерывном режиме и от 2,5 до 600 мНм в прерывистом режиме.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ ДВИГАТЕЛЯ С ЩЕТОЧНЫМ КРЫШКОМ: РОТОРНЫЕ ДВИГАТЕЛИ постоянного тока без железа
Ротор обычного двигателя постоянного тока с железным сердечником изготовлен из медной проволоки, намотанной на полюса его железного сердечника. Такая конструкция ротора дает следующие результаты:
- Большая инерция из-за массы железа, затрудняющая быстрый пуск и остановку
- Зубчатый эффект и предпочтительное положение ротора, вызванные притяжением железных полюсов к постоянному магниту.
- Значительная индуктивность катушки, вызывающая искрение во время коммутации. Это искрение вызывает, с одной стороны, электрический шум, а с другой стороны, сильную электроэрозию щеток. Именно по последней причине в обычных двигателях используются щетки угольного типа. Катушка ротора без железа
- обеспечивает высокое ускорение
Самонесущий электродвигатель постоянного тока без железа от Portescap имеет множество преимуществ по сравнению с обычными электродвигателями с железным сердечником:
- высокое отношение крутящего момента к моменту инерции
- Отсутствие предпочтительных положений ротора
- очень низкий крутящий момент и изменение обратной ЭДС в зависимости от положения якоря
- практически нулевой гистерезис и потери на вихревые токи
- незначительная электрическая постоянная времени
- почти нет риска размагничивания, поэтому ускорение происходит быстро
- Незначительное падение напряжения на щетках (с многопроволочными щетками)
- нижнее вязкое демпфирование
- линейные характеристики
Доказано, что система Portescap REE увеличивает срок службы двигателя до 1000 процентов
Два основных фактора, влияющих на срок службы коммутатора щеточного двигателя постоянного тока, — это механический износ щеток из-за скользящих контактов и эрозия электродов из-за образования электрической дуги. Превосходная обработка поверхности, точность коллектора наряду с улучшенными материалами, такими как коммутаторы из драгоценных металлов с соответствующими сплавами, помогли снизить механический износ щеток. Чтобы эффективно уменьшить электроэрозию при одновременном продлении срока службы коммутатора, Portescap внедрил инновационную систему катушек REE (уменьшение электроэрозии). Система REE снижает эффективную индуктивность коммутации щеток за счет оптимизации взаимной индукции сегментов катушки. Чтобы сравнить и сопоставить преимущества системы REE, Portescap провел испытания двигателей с оптимизацией катушки REE и без нее.Износ поверхности коллектора показал улучшение в диапазоне от 100 до 300 процентов, как показано на рисунке 5. Змеевики 4, 5 и 6 усилены РЗЭ, а 1, 2 и 3 — без армирования РЗЭ.
Превосходная обработка поверхности, точность коллектора наряду с улучшенными материалами, такими как коммутаторы из драгоценных металлов с соответствующими сплавами, помогли снизить механический износ щеток. Чтобы эффективно уменьшить электроэрозию при одновременном продлении срока службы коммутатора, Portescap внедрил инновационную систему катушек REE (уменьшение электроэрозии). Система REE снижает эффективную индуктивность коммутации щеток за счет оптимизации взаимной индукции сегментов катушки. Чтобы сравнить и сопоставить преимущества системы REE, Portescap провел испытания двигателей с оптимизацией катушки REE и без нее.Износ поверхности коллектора показал улучшение в диапазоне от 100 до 300 процентов, как показано на рисунке 5. Змеевики 4, 5 и 6 усилены РЗЭ, а 1, 2 и 3 — без армирования РЗЭ.
Теория электродвигателя со щеткой — безжелезные роторы
Электромеханические свойства двигателей с ротором без железа можно описать с помощью следующих уравнений:
1. Напряжение источника питания U0 равно сумме падения напряжения, создаваемого током I в омическом сопротивлении RM обмотки ротора, и напряжения Ui, индуцированного в роторе:
Напряжение источника питания U0 равно сумме падения напряжения, создаваемого током I в омическом сопротивлении RM обмотки ротора, и напряжения Ui, индуцированного в роторе:
U0 = I x RM + Ui (1)
2.Напряжение Ui, индуцируемое в роторе, пропорционально угловой скорости ротора ω: Ui = kE x ω (2)
Следует отметить, что существует следующая зависимость между угловой скоростью ωexpress в радианах в секунду и скоростью вращения n, выраженной в оборотах в минуту: ω = (2π n) / 60
3. Крутящий момент ротора M пропорционален току ротора I:
M = kT x I (3)
Здесь можно упомянуть, что крутящий момент M ротора равен сумме крутящего момента нагрузки ML, создаваемого двигателем, и момента трения Mf двигателя:
M = ML + Mf
Подставляя фундаментальные уравнения (2) и (3) в (1), мы получаем характеристики крутящего момента / угловой скорости для двигателя постоянного тока с ротором без железа:
U0 = M x RM + kE x ω (4)
Вычислив постоянные kE и kT из размеров двигателя, числа витков на обмотку, числа витков, диаметра ротора и магнитного поля в воздушном зазоре, мы находим для микромотора постоянного тока с ротор без железа:
M / I = Ui / ω = k (5)
Это означает, что k = kE = kT
Тождество kE = kT также очевидно из следующих энергетических соображений:
Электрическая мощность Pe = U0 x I, которая подводится к двигателю, должна быть равна сумме механической мощности Pm = M x ω, производимой ротором, и рассеиваемой мощности (согласно закону Джоуля) Pv = I2 x RM:
Pe = U0 x I = M x ω + I2 x RM = Pm + Pv
Кроме того, умножая уравнение (1) на I, мы также получаем формулу для электрической мощности Pe:
Pe = U0 x I = I2 x RM + Ui x I
Эквивалентность двух уравнений дает M x ω = Ui x I или Ui / ω = M / I и kE = kT = k
Quod erat демонстрационный. Используя приведенные выше соотношения, мы можем записать основные уравнения (1) и (2) следующим образом:
Используя приведенные выше соотношения, мы можем записать основные уравнения (1) и (2) следующим образом:
U0 = I x RM + k x ω (6)
и:
U0 = M x RM / + k x ω (7)
Графическая экспресс-характеристика «скорость-момент»:
Чтобы преодолеть момент трения Mf из-за трения щеток и подшипников, двигатель потребляет ток холостого хода I0. Это дает
Mf = k x I0
и:
U0 = I0 x RM + k x ω0, где
ω0 = 2π / 60 x n0, следовательно:
k = U0 — I0 / ω0 x RM (8)
Таким образом, возможно ли вычислить постоянную двигателя k со скоростью холостого хода n0, током холостого хода I0 и сопротивлением ротора RM.
Id пускового тока рассчитывается следующим образом:
Id = U0 / RM
Следует помнить, что СО в значительной степени зависит от температуры; другими словами, сопротивление ротора увеличивается с нагревом двигателя из-за рассеиваемой мощности (закон Джоуля):
RM = RM0 (1 + γ x ∆T)
Где γ — температурный коэффициент меди (γ = 0,004 / ° C).
Поскольку медная масса катушек сравнительно мала, она очень быстро нагревается под действием тока ротора, особенно в случае медленного или повторяющегося запуска.Крутящий момент Md, создаваемый пусковым током Id, получается следующим образом:
Md = Id x k — Mf = (Id — I0) k (9)
Применяя уравнение (1), мы можем вычислить угловую скорость ω, создаваемую напряжением U0 с моментом нагрузки Mi. Сначала определим ток, необходимый для получения крутящего момента M = ML + Mf:
I = (ML + Mf) / k Поскольку Mf / k = I0, мы также можем написать
I = (ML / k) + I0 (10)
Для угловой скорости ω получаем соотношение
ω = (U0 — I x RM) / k (11)
= U0 / k — RM / k2 (ML + Mf)
, в котором снова должна быть учтена температурная зависимость сопротивления ротора RM; Другими словами, необходимо рассчитать значение RM при рабочей температуре ротора.С другой стороны, с помощью уравнения (6) мы можем вычислить ток I и момент нагрузки ML для заданной угловой скорости ω и заданного напряжения U0:
I = (U0 — k x ω) RM = Id — k / RM ω (12)
А с уравнением (10)
ML = (I — I0) k
Получаем значение ML:
ML = (I — I0) k — k2 / RM ω
Чаще всего возникает проблема определения напряжения источника питания U0, необходимого для получения скорости вращения n для заданного момента нагрузки ML (угловая скорость ω = n x 2π / 60). Вводя уравнение (10) в (6), получаем:
Вводя уравнение (10) в (6), получаем:
U0 = (ML + I0) / k RM + k x ω (13)
Практические примеры расчетов
Обратите внимание, что повсюду используется Международная система единиц (S.I.).
1. Предположим, что для двигателя Portescap® 23D21-216E мы хотим вычислить постоянную двигателя k, пусковой ток Id и пусковой крутящий момент Md при температуре ротора 40 ° C. При напряжении источника питания 12 В скорость холостого хода n0 составляет 4900 об / мин (ω0 = 513 рад / с), ток холостого хода I0 = 12 мА и сопротивление RM0 = 9.5 Ом при 22 ° C.
Вводя значения ω0, I0, RM0 и U0 в уравнение (8), мы получаем постоянную двигателя k для двигателя 23D21-216E: k = 12 — 0,012 x 9,5 = 0,0232 Vs 15
Перед расчетом пускового тока необходимо рассчитать сопротивление ротора при 40 ° C. При ∆T = 18 ° C и RM0 = 9,5 Ом получаем RM = (1 + 0,004 x 18) = 9,5 x 1,07 = 10,2 Ом.
Пусковой ток Id при температуре ротора 40 ° C становится
Id = (U0 / RM) = (12/10. 2) = 1,18 А
2) = 1,18 А
, а пусковой момент Md, согласно уравнению (9), равен Md = k (Id — I0) = 0,0232 (1,18 — 0,012) = 0,027 Нм.
2. Зададимся вопросом: какой скорости вращения n достигается двигатель при нагрузочном моменте 0,008 Нм и напряжении питания 9 В при температуре ротора 40 ° C?
Используя уравнение (10), мы сначала вычисляем ток, который подается на двигатель при следующих условиях:
I = (ML / k) + I0 = (0.008 / 0,0232) + 0,012 = 0,357 А
Уравнение (11) дает угловую скорость ω:
ω = (U0 — I x RM) / k = (9 — 0,357 x 10,2) / 0,0232 = 231 рад / с
и скорость вращения n: n = 60 / 2π ω = 2200 об / мин
Таким образом, двигатель достигает скорости 2200 об / мин и потребляет ток 357 мА.
3. Теперь вычислим крутящий момент M при заданной скорости вращения n 3000 об / мин (ω = 314 рад / с) и напряжении источника питания U0 15 В; уравнение (12) дает значение тока:
I = (U0 — k x ω) / RM = Id — k / RM x ω
= 1. 18 — (0,0232 / 10,2) x 314 = 0,466 А
18 — (0,0232 / 10,2) x 314 = 0,466 А
и крутящий момент нагрузки ML:
ML = k (I — I0)
= 0,0232 (0,466 — 0,012)
= 0,0105 Нм
(ML = 10,5 мНм)
4. Наконец, определим напряжение источника питания U0, необходимое для получения скорости вращения n 4000 об / мин (ω = 419 рад / с) с моментом нагрузки ML 0,008 Нм, температура ротора снова составляет 40 ° C ( RM = 10,2 Ом).
Как мы уже подсчитали, ток I необходим для крутящего момента 0.008 Нм равно 0,357 А
U0 = I x RM + k x ω
= 0,357 х 10,2 + 0,0232 х 419
= 13,4 вольт
ПРИМЕНЕНИЕ ДВИГАТЕЛЯ С ЩЕТКОЙ
МЕДИЦИНСКИЙ
- Электрохирургические инструменты
- Стоматологические ручные инструменты
- Инфузионные, волюметрические и инсулиновые насосы
- Диагностическое и сканирующее оборудование
Преимущества: анализаторы с уменьшенной занимаемой площадью, высокой эффективностью и точностью позиционирования образца
БЕЗОПАСНОСТЬ И ДОСТУП
- Камеры видеонаблюдения
- Замки
- Считыватели штрих-кода
- Системы оповещения
Преимущества: низкий уровень шума и вибрации, высокая мощность и превосходная эффективность
АЭРОКОСМИЧЕСКАЯ ИНФОРМАЦИЯ И ОБОРОНА
- Датчик в кабине
- Индикаторы
- спутников
- Оптические сканеры
Преимущества: низкая инерция, компактность и вес, высокая эффективность
РОБОТОТЕХНИКА И ЗАВОДСКАЯ АВТОМАТИЗАЦИЯ
- Конвейеры
- Автомобили с дистанционным управлением
- Промышленные роботы
Преимущества: высокая мощность и небольшой вес
РУЧНОЙ ИНСТРУМЕНТ
Ножницы Ручные инструменты для обрезки Пистолеты для гвоздей
Преимущества: высокая эффективность, компактность и вес, низкий уровень шума
ДРУГОЕ
Оргтехника Полупроводники Модельные железные дороги Обработка документов Оптика Автомобильная промышленность Транспорт Аудио видео
Преимущества: низкий уровень шума, высокая мощность, лучшее регулирование двигателя
Обзор приложений
МЕДИЦИНСКИЕ АНАЛИЗАТОРЫ Portescap решает множество задач, связанных с анализаторами, от отбора проб до быстрого сканирования и обнаружения молекулярных механизмов в жидкостях и газах с помощью щеточных двигателей постоянного тока без сердечника. Для приложений с высокой пропускной способностью — тех, где за час анализируется более 1000 анализов — подходят высокоэффективные и высокоскоростные двигатели, такие как щеточные двигатели постоянного тока без сердечника. Их низкий момент инерции ротора и короткая механическая постоянная времени делают их идеально подходящими для таких применений. Например, бесщеточный электродвигатель постоянного тока Portescap диаметром 22 мм обеспечивает скорость холостого хода 8000 об / мин и механическую постоянную времени 6,8 миллисекунды. Другая функция анализатора, которая играет жизненно важную роль в их выводе, — это сбор образцов из пробирок или анализов и их передача до систем измерения на основе фотометрии, хроматографии или других подходящих схем.И здесь бесщеточный электродвигатель постоянного тока очень применим благодаря удельной мощности, которую он упаковывает в небольшой размер корпуса. Вы можете максимизировать производительность своего приложения с помощью рабочей лошадки диаметром 16 или 22 мм от Portescap.
Для приложений с высокой пропускной способностью — тех, где за час анализируется более 1000 анализов — подходят высокоэффективные и высокоскоростные двигатели, такие как щеточные двигатели постоянного тока без сердечника. Их низкий момент инерции ротора и короткая механическая постоянная времени делают их идеально подходящими для таких применений. Например, бесщеточный электродвигатель постоянного тока Portescap диаметром 22 мм обеспечивает скорость холостого хода 8000 об / мин и механическую постоянную времени 6,8 миллисекунды. Другая функция анализатора, которая играет жизненно важную роль в их выводе, — это сбор образцов из пробирок или анализов и их передача до систем измерения на основе фотометрии, хроматографии или других подходящих схем.И здесь бесщеточный электродвигатель постоянного тока очень применим благодаря удельной мощности, которую он упаковывает в небольшой размер корпуса. Вы можете максимизировать производительность своего приложения с помощью рабочей лошадки диаметром 16 или 22 мм от Portescap.
Обзор приложений
ИНФУЗИОННЫЕ НАСОСЫ Щеточные электродвигатели постоянного тока без сердечника обладают значительными преимуществами по сравнению со своими щеточными аналогами с железным сердечником для некоторых применений насосов для интенсивной терапии, где преимущества варьируются от повышения эффективности до более высокой удельной мощности при меньшем размере корпуса.Одним из факторов, ухудшающих характеристики двигателя при длительном использовании, является нагрев двигателя с соответствующей потерей Джоулей. В терминологии двигателя это определяется коэффициентом регулирования двигателя, определяемым сопротивлением катушки R и постоянной крутящего момента k. Чем ниже коэффициент регулирования двигателя (R / k2), тем лучше двигатель будет работать в течение всего срока службы, сохраняя при этом более высокий КПД. Обладая одними из самых низких факторов регулирования двигателя, последняя инновация Portescap в области двигателей Athlonix уже приносит пользу приложениям в области инфузионных насосов, предлагая на выбор более мощный двигатель с меньшими тепловыми потерями, более высокую эффективность и удельную мощность в компактных корпусах.
Обзор приложений
ОБОРУДОВАНИЕ ДЛЯ СБОРКИ ЭЛЕКТРОНИКИ НА ПОВЕРХНОСТНОЙ МОНТАЖЕ Чем отличаются универсальные 35-миллиметровые двигатели без сердечника Portescap с коммутацией угольных щеток для сборки электроники, робототехники и автоматизированного машинного оборудования, а также они стали «рабочей лошадкой» в некоторых механизмах захвата и установки, используемых в технологии поверхностного монтажа. Наши 35-миллиметровые двигатели с низким моментом инерции могут обеспечить высокое ускорение, низкий уровень электромагнитных помех и частые пусковые остановки, которые необходимы машинам, при этом сохраняя меньшие и легкие конверты.
ДОПОЛНИТЕЛЬНАЯ ИНФОРМАЦИЯ
Ротор в сборе
Щеточный двигатель постоянного тока в разрезе
Основные сведения о щеточном двигателе постоянного тока
Загрузите этот технический документ в формате PDF Бесщеточные двигатели постоянного тока без железа используются в большом количестве продуктов и приложений, таких как медицина, робототехника, автоматизация производства, безопасность и доступ, гражданская авиация и аэрокосмическая промышленность.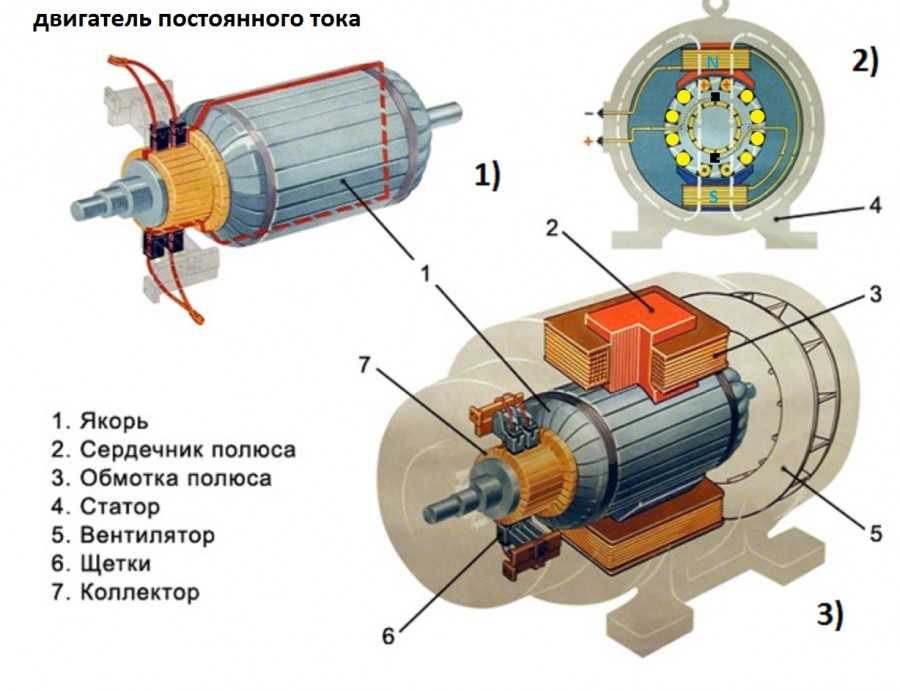
Обычный электродвигатель постоянного тока с щеточным сердечником значительно превосходит безжелезную технологию.Основными преимуществами этой уникальной концепции являются: отсутствие потерь в стали, низкое трение и хорошее рассеивание тепла, что приводит к очень эффективному двигателю, что означает идеальный выбор для оборудования с батарейным питанием. Конструкция ротора с низким моментом инерции обеспечивает очень высокое ускорение и быстрое время реакции. Наконец, линейные характеристики крутящего момента и скорости делают двигатель очень простым в управлении.
Эта статья представляет собой краткое техническое описание миниатюрных двигателей постоянного тока без железа. Оно предназначено для того, чтобы помочь инженерам лучше понять основы безжелезных электродвигателей постоянного тока и выбрать лучший электродвигатель для их применения.
1. ОСНОВНЫЕ УРАВНЕНИЯ БЕЗЖЕЛЕЗНЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА ЩЕТКИ: ДВИГАТЕЛЬ С БЕЗЖЕЛЕЗНЫМ РОТОРОМ МОЖЕТ БЫТЬ ПРЕДСТАВЛЕН СЛЕДУЮЩЕЙ УПРОЩЕННОЙ ДИАГРАММОЙ.
Напряжение, индуцируемое в роторе, пропорционально угловой скорости ротора: (см. Рисунок 1)
Ui = k * ω
k: постоянная крутящего момента ω: угловая скорость
В результате получается уравнение:
U = R * I + к * ω
(В) (Ώ) (А) (Нм / год) (показ. / С)
Особенность электродвигателя постоянного тока без железа такова, что функции скорости и крутящего момента являются линейными.Скорость пропорциональна напряжению, а крутящий момент пропорционален току:
Т = к * (I — IO)
(Нм) (Нм / А) (А) (А)
I: ток якоря IO: ток холостого хода
2. КАК ОПРЕДЕЛИТЬ МЕХАНИЧЕСКУЮ МОЩНОСТЬ, ЭЛЕКТРИЧЕСКУЮ МОЩНОСТЬ И ЭФФЕКТИВНОСТЬ?
Механическая мощность, развиваемая двигателем, равна сумме электрической мощности, подаваемой на двигатель, и рассеиваемой мощности (тепла): Pelect = Pmech + PJ (см. Рисунок 2)
КПД определяется соотношением механической и электрической мощности:
η = Пмех / Пелект
КПД бесщеточного электродвигателя постоянного тока без сердечника может достигать 90%
Помните: самый высокий КПД достигается на высоких оборотах
3. ПОНИМАЙТЕ УРАВНЕНИЯ — ЧЕТЫРЕ ЗАПОМНИТЕ:
ПОНИМАЙТЕ УРАВНЕНИЯ — ЧЕТЫРЕ ЗАПОМНИТЕ:
(см. Рисунок 3)
# 1: ток в двигателе пропорционален его крутящему моменту.
# 2: Скорость двигателя пропорциональна напряжению питания (U).
# 3: максимальная эффективность достигается на высокой скорости.
# 4: максимальная механическая мощность достигает максимума, когда момент нагрузки равен половине момента остановки.
4. КАК ОПРЕДЕЛИТЬ ТЕМПЕРАТУРУ РОТОРА И СОПРОТИВЛЕНИЕ РОТОРА ПРИ ДАННОЙ ТЕМПЕРАТУРЕ:
(Максимальная температура катушки электродвигателя постоянного тока без сердечника с щеточным покрытием обычно составляет 155 ° C.)
R22 * I2 * (Rth2 + Rth3) * (1-22 α) + Ta
Tr = –––––––––––––––––––––––––––––
1 — α * R22 * I2 * (Rth2 + Rth3)
R = R22 * (1 + α * ΔТемпература)
Tr: температура ротора (° C)
R22: сопротивление двигателя при 22 ° C (Ом) — каталожное значение
I: ток (А)
Rth2: тепловое сопротивление ротора / корпуса (° C / Вт) — значение по каталогу
Rth3: тепловое сопротивление корпус / окружающая среда (° C / Вт) — значение по каталогу
α: тепловой коэффициент сопротивления меди (0. 0039 / ° С)
0039 / ° С)
Ta: температура окружающей среды (° C)
R: сопротивление (Ом)
ΔТемп = Tr -22
5. КАК ОПРЕДЕЛИТЬ ПОСТОЯННУЮ ВРЕМЯ СИСТЕМЫ И ВРЕМЯ ЗАПУСКА БЕЗ ЖЕЛЕЗНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С ЩЕТКОЙ (НАПРЯЖЕНИЕ):
τ = τM * (1 + JL / JM) t = τ * ln (ω1 / (ω1 -ω))
τ: постоянная времени двигателя + нагрузка (мс)
τM: постоянная времени только двигателя (мс) — каталожное значение
JL: инерция нагрузки (кгм2)
JM: инерция двигателя (кгм2) — каталожная стоимость
t: время начала (мс)
ω1: угловая скорость, полученная через бесконечное время (рад / с)
ω: угловая скорость (рад / с) через время = t
6.БЕЗЖЕЛЕЗНАЯ ТЕХНОЛОГИЯ PORTESCAP BRUSHED DC В ОДНОМ ВЗГЛЯДЕ:
(см. Рисунок 4)
| Детали концепции | Характеристики двигателя | Преимущества для приложений |
|---|---|---|
| Ротор без железа | Малый момент инерции | Высокое ускорение, идеально подходит для инкрементального движения, линейная функция скорости-момента, нечувствительность к ударам |
| Отсутствие гистерезиса и потерь на вихревые токи | Высокая эффективность, низкие потери только от трения. Идеально для работы от батареи Идеально для работы от батареи | |
| Без магнитного насыщения | Высокий пиковый крутящий момент без риска размагничивания | |
| Магнит центрального статора | Высокая мощность в зависимости от размера и веса | Идеально подходит для портативного или небольшого оборудования или требует небольших размеров |
| Подшипники малого размера | Низковязкое демпфирование | Высокие пиковые скорости, очень низкие потери, зависящие от скорости |
| Низкое пусковое напряжение | ||
| Система коммутации драгоценных металлов | Низкое трение, низкий электрический шум | Низкие потери и износ, низкие электромагнитные помехи |
| RatafenteTMSeries Copper-Graphic Commutation | Возможна коммутация высоких плотностей тока | Высокий продолжительный и пиковый крутящие моменты без риска размагничивания двигателя |
| Номинальная температура двигателя до 155 ° C | Непрерывный крутящий момент исключительно высок для размера двигателя, что снижает вес, габариты и систему охлаждения | |
| Очень компактная система коммутации | Превосходная устойчивость к ударам и вибрации | |
| Высокое отношение крутящего момента к моменту инерции | Высокое ускорение, короткая механическая постоянная времени |
7. КАК ВЫБРАТЬ ПОДХОДЯЩИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ДЛЯ ЩЕТКИ? ПОСМОТРИМ НА ПРИМЕРЕ МИНИАТЮРНОГО ВОЗДУШНОГО НАСОСА.
КАК ВЫБРАТЬ ПОДХОДЯЩИЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА ДЛЯ ЩЕТКИ? ПОСМОТРИМ НА ПРИМЕРЕ МИНИАТЮРНОГО ВОЗДУШНОГО НАСОСА.
A 6 В, 0,6 Миниатюрный воздушный насос с батарейным питанием должен иметь диапазон расхода 850 — 2500 куб. См / мин, что эквивалентно:
T = 3 мНм крутящего момента при 9000 об / мин (ω = 942,5 об / с).
Требуемая механическая мощность:
Пмех = Т * ω = 0,003 * 942,5 = 2,82 Вт
Portescap 16G рассчитаны на максимальную выходную мощность 5 Вт.
Рассмотрим 16G88-220E 1 (номинальная обмотка 6 В) (см. Рисунок 5)
| Тип обмотки | -220П | -220E | -213E | -211E | -210E | -208E | |
|---|---|---|---|---|---|---|---|
| Измеренные значения | |||||||
| Измерение напряжения | В | 3 | 6 | 9 | 12 | 15 | 24 |
| Скорость холостого хода | об / мин | 10600 | 10900 | 8000 | 8700 | 9000 | 10400 |
| Тормозной момент | мНм (унция-дюйм) | 16 (2. 3) 3) | 19,9 (2,8) | 12,7 (1,80) | 12,1 (1,71) | 12,2 (1,73) | 14,3 (2,0) |
| Сред. Ток без нагрузки | мА | 45 | 17 | 8 | 6,5 | 5,5 | 3.5 |
| Типичное пусковое напряжение | В | 0,02 | 0,05 | 0,12 | 0,18 | 0,20 | 0,30 |
| Максимальные рекомендуемые значения | |||||||
| Макс. постоянный ток | A | 2.0 | 1,21 | 0,55 | 0,42 | 0,35 | 0,25 |
Макс. постоянный крутящий момент постоянный крутящий момент | мНм (унция-дюйм) | 5,2 (0,74) | 6,3 (0,89) | 5,8 (0,82) | 5,4 (0,76) | 5,4 (0,76) | 5.4 (0,76) |
| Макс. угловое ускорение | 103рад / с2 | 282 | 277 | 292 | 273 | 291 | 272 |
| Внутренние параметры | |||||||
| Постоянная обратной ЭДС | В / 1000 об / мин | 0.28 | 0,55 | 1,12 | 1,37 | 1,65 | 2,3 |
| Постоянная крутящего момента | мНм / А (унция-дюйм / А) | 2,67 (0,38) | 5,3 (0,74) | 10,7 (1,51) | 13,1 (1,85) | 15,8 (2,23) | 22 (3. 11) 11) |
| Оконечное сопротивление | Ом | 0,5 | 1,6 | 7,6 | 13 | 19,5 | 37 |
| Регулировка двигателя R / k2 | 103 / Нм | 70 | 58 | 66 | 76 | 79 | 77 |
| Индуктивность ротора | мГн | 0.01 | 0,045 | 0,15 | 0,26 | 0,40 | 0,72 |
| Инерция ротора | кгм 210-7 | 0,8 | 0,91 | 0,8 | 0,8 | 0,74 | 0,08 |
| Механическая постоянная времени | мс | 5. 6 6 | 5,3 | 5,6 | 6,1 | 5,8 | 6,7 |
Первый шаг — вычислить ток, который подается на двигатель в условиях, описанных выше.
T = k * (I — IO) —> I = T / k + IO = 0,003 / 0,0053 + 0,017 = 0,583 А
Второй шаг — определить напряжение питания для получения требуемой скорости.
9000 об / мин (942,5 об / с)
U = R * I + k * ω = 1,6 * 0,583 + 0,0053 * 942,5 = 5,93 В <6 В
Таким образом, двигатель достигнет желаемой скорости при заданном крутящем моменте в пределах ограничений батареи.
Теперь мы можем определить КПД двигателя.
Pelect = U x I = 5,93 * 0,583 = 3,45 Вт
КПД * = Pmech / Pelect = 2,82 / 3,45 = 81%
Предположим, что этому насосу необходимо достичь не менее 5000 об / мин менее чем за 15 мс.(См. Рисунок 6)
Инерция нагрузки: 1 x 10-7 кг.м2
Инерция ротора: 0,91 x 10-7 кг. м2
м2
τ = τM * (1 + JL / JM) t = τ * ln (ω1 / (ω1 -ω))
τ = 5,3 * (1 + 1 / 0,91) = 11,12 мс
t = 11,12 * ln (9000 / (9000-5000)) = 9 мс <15 мс
Скорость насосов будет 5000 об / мин через 9 мс.
Эти отличные динамические характеристики достигаются благодаря концепции ротора без железа. Низкий момент инерции ротора обеспечивает очень высокое ускорение.
* КПД двигателя выше 80%, что способствует очень долгому сроку службы батареи. Достижение такой эффективности возможно только благодаря новейшей технологии бесщеточных электродвигателей постоянного тока постоянного тока Portescap.