Для чего нужна компенсация реактивной мощности
Для чего нужна компенсация реактивной мощности
1. Реактивная мощность и энергия ухудшают показатели работы энергосистемы, то есть загрузка реактивными токами генераторов электростанций увеличивает расход топлива; увеличиваются потери в подводящих сетях и приемниках; увеличивается падение напряжения в сетях.
2. Реактивный ток дополнительно нагружает линии электропередачи, что приводит к увеличению сечений проводов и кабелей и соответственно к увеличению капитальных затрат на внешние и внутриплощадочные сети.
3. Компенсация реактивной мощности, в настоящее время, является немаловажным фактором позволяющим решить вопрос энергосбережения практически на любом предприятии.
По оценкам отечественных и ведущих зарубежных специалистов, доля энергоресурсов, и в частности электроэнергии занимает величину порядка 30-40% в стоимости продукции. Это достаточно веский аргумент, чтобы руководителю со всей серьезностью подойти к анализу и аудиту энергопотребления и выработке методики компенсации реактивной мощности.
Основные потребители реактивной мощности:
— Асинхронные электродвигатели, которые потребляют 40 % всей мощности совместно с бытовыми и собственными нуждами; электрические печи 8 %; преобразователи 10 %; трансформаторы всех ступеней трансформации 35 %; линии электропередач 7 %.
В электрических машинах переменный магнитный поток связан с обмотками. Вследствие этого в обмотках при протекании переменного тока индуктируются реактивные э.д.с. обуславливающие сдвиг по фазе (fi) между напряжением и током. Этот сдвиг по фазе обычно увеличивается, а косинус фи уменьшается при малой нагрузке. Например, если косинус фи двигателей переменного тока при полной нагрузке составляет 0,75-0,80, то при малой нагрузке он уменьшится до 0,20-0,40.
— Малонагруженные трансформаторы также имеют низкий коэффициент мощности (косинус фи). Поэтому, применять компенсацию реактивной мощности, то результирующий косинус фи энергетической системы будет низок и ток нагрузки электрической, без компенсации реактивной мощности, будет увеличиваться при одной и той же потребляемой из сети активной мощности. Соответственно при компенсации реактивной мощности (применении автоматических конденсаторных установок КРМ) ток потребляемый из сети снижается, в зависимости от косинус фи на 30-50%, соответственно уменьшается нагрев проводящих проводов и старение изоляции.
Соответственно при компенсации реактивной мощности (применении автоматических конденсаторных установок КРМ) ток потребляемый из сети снижается, в зависимости от косинус фи на 30-50%, соответственно уменьшается нагрев проводящих проводов и старение изоляции.Кроме этого, реактивная мощность наряду с активной мощностью учитывается поставщиком электроэнергии, а следовательно, подлежит оплате по действующим тарифам, поэтому составляет значительную часть счета за электроэнергию.
Наиболее действенным и эффективным способом снижения потребляемой из сети реактивной мощности является применение установок компенсации реактивной мощности (конденсаторных установок).
Использование конденсаторных установок для компенсации реактивной мощности позволяет:
- разгрузить питающие линии электропередачи, трансформаторы и распределительные устройства;
- снизить расходы на оплату электроэнергии
- при использовании определенного типа установок снизить уровень высших гармоник;
- подавить сетевые помехи, снизить несимметрию фаз;
- сделать распределительные сети более надежными и экономичными.

Средства компенсации реактивной мощности | Русэлт
В условиях экономического кризиса актуальной проблемой является рациональное использование электроэнергии. Производители предлагают специальное оборудование, которое служит средством для повышения параметров электроэнергии и уменьшает нагрузки на кабельные трассы.
Компенсация реактивной мощности продлевает функционирование электронного оборудования, снижает технические потери активной энергии на распределительных устройствах систем питания и уменьшает перепады напряжения в элементах электросети.
Дефицит реактивной мощности
При недостатке РМ на предприятии наблюдается перегрузка коммутационной аппаратуры и трансформаторов, потеря напряжения и перегрев кабеля. Чтобы решить эти проблемы, используют такое оборудование:
- батареи синхронных конденсаторов (БК) — ёмкостные устройства, которые состоят из ряда конденсаторов и дополнительного оборудования. Они бывают двух видов: БК низковольтные и высоковольтные.
 К преимуществам использования относят лёгкость монтажа, мобильность и небольшие собственные удельные потери мощности.
К преимуществам использования относят лёгкость монтажа, мобильность и небольшие собственные удельные потери мощности. - синхронные компенсаторы — устройство большой мощности, предназначенное для потребления или выработки РМ, с номинальным входным напряжением около 6-10 кВ. Они работают без механической нагрузки и имеют положительный регулирующий эффект. Агрегат совмещает возможность конденсатора и реактора.
- синхронные электродвигатели. Используются для привода мощных агрегатов без возможности регулировки частоты вращения. Устройство несёт механические нагрузки.
- компенсационные преобразователи. Устройство генерирует дополнительное напряжение. Генерация компенсирующей мощности происходит за счёт того, что ток поступает раньше на следующую фазу.
Средства компенсации при избытке РМ
Если реактивная мощность превышена, то используют такое оборудование:
- шунтирующие реакторы. Они бывают управляемые и неуправляемые. Принцип неуправляемых ШР состоит в подключении к воздушным линиям и снижение перегрузки коммутационной аппаратуры при включенных линиях электропередач, управляемых — поддержка напряжения без использования высоковольтных выключателей и повышения предела статической устойчивости.

- синхронные компенсаторы. Это машина, которая работает при меняющемся токе возбуждения и поддерживает оптимальный уровень напряжения сети. Они устанавливаются на крупных промышленных предприятиях.
Компенсация реактивной мощности обеспечивает качество электроэнергии, необходимый запас устойчивости в узле электрической сети.
Установки компенсации реактивной мощности (УКРМ)
Реактивная мощность — часть полной мощности, затрачиваемая на электромагнитные процессы в нагрузке имеющей емкостную и индуктивную составляющие. Не выполняет полезной работы, вызывает дополнительный нагрев проводников и требует применения источника энергии повышенной мощности. Компенсация реактивной мощности, в настоящее время, является немаловажным фактором позволяющим решить вопрос энергосбережения и снижения нагрузок на электросеть. По оценкам отечественных и ведущих зарубежных специалистов, доля энергоресурсов, и в частности электроэнергии занимает значительную величину в себестоимости продукции.
Применение установок компенсации реактивной мощности
Применение конденсаторных установок компенсации реактивной мощности позволяет не только снизить расходы на оплату электроэнергии, но и предоставляет возможности для решения целого ряда сопутствующих вопросов, которые могут возникать на производстве в ходе реализации программы, направленной на обеспечение энергосбережения.
Используя конденсаторные установки, значительно снижается установленная мощность силовых трансформаторов, обеспечивается электропитание нагрузки по линиям кабеля, которые имеют меньшее сечение, в результате чего при уменьшении значения тока происходит и уменьшение потерь в кабельных линиях. Подключение дополнительной активной нагрузки, предотвращение разнообразных немалых потерь напряжения, которое происходит в линиях питания, максимальное использование автономных дизельных генераторов – все это возможно при установке автоматической конденсаторной установки.
Преимущества использования конденсаторных установок
- снижение расходов на электроэнергию
- уменьшение тепловых потерь
- снижение загрузки трансформаторов, линий электропередач, распределительных устройств
- снижение влияния высших гармоник
- повышение электромагнитной совместимости, снижение ассиметрии фаз
- снижение расходов на проведение ремонта и обновление электрооборудования уже существующих сетей
- возможность подключения дополнительных нагрузок
Наша компания готова произвести расчет требуемой компенсации и изготовить установки компенсации реактивной мощности до 750 кВАр на напряжение 0,4 кВ регулируемого и нерегулируемого типа, навесного и напольного исполнения, в случае необходимости встроенные в РУНН.
В качестве комплектующих мы используем
- контроллеры ABB, EPCOS, LOVATO
- защитное и пускорегулирующее оборудование ABB, EPCOS, Schneider Electric, APATOR
- конденсаторы ABB, EPCOS и др.
 производителей по согласованию с заказчиком
производителей по согласованию с заказчиком - отечественные или импортные корпуса навесного или напольного исполнения
Все выпускаемые изделия имеют сертификаты РСТ, гарантию 2 года, обеспечиваются полным комплектом документации необходимой для сдачи в эксплуатацию.
Зачем нужна компенсация реактивной мощности?
Компенсация реактивной мощности на предприятии позволяет существенно сократить расход электроэнергии, снизить нагрузку на кабельные сети и трансформаторы, продлив тем самым их ресурс.
Где необходимы конденсаторные установки?
Как известно Основные потребители электроэнергии на промышленных предприятиях являются такие индуктивные приемники, как асинхронные электродвигатели, трансформаторы, индукционные установки и т. д. Работа этих приемников связана с потреблением реактивной энергии для создания электромагнитных полей.
Реактивная энергия («паразитная» энергия) не производит полезной работы, а, циркулируя между приемником и источником тока, приводит к дополнительной загрузке линий электропередачи и генераторов и, следовательно, снижает коэффициент мощности сети.
Наличие реактивной мощности является неблагоприятным фактором для сети в целом
- Возникают дополнительные потери в проводниках вследствие увеличения тока
- Снижается пропускная способность распределительной сети
- Отклоняется напряжение сети от номинала (падение напряжения из-за увеличения реактивной составляющей тока питающей сети).
Показателем потребления реактивной мощности является коэффициент мощности (КМ), численно равный косинус угла (ɸ) между током и напряжением. КМ потребителя определяется как отношение потребляемой активной мощности к полной, действительно взятой из сети, т.е.: COS(ɸ)=Р/S. Этим коэффициентом принято характеризовать уровень реактивной мощности двигателей, генераторов и сети предприятия в целом. Чем ближе значение COS(ɸ) к единице, тем меньше доля взятой из сети реактивной мощности.
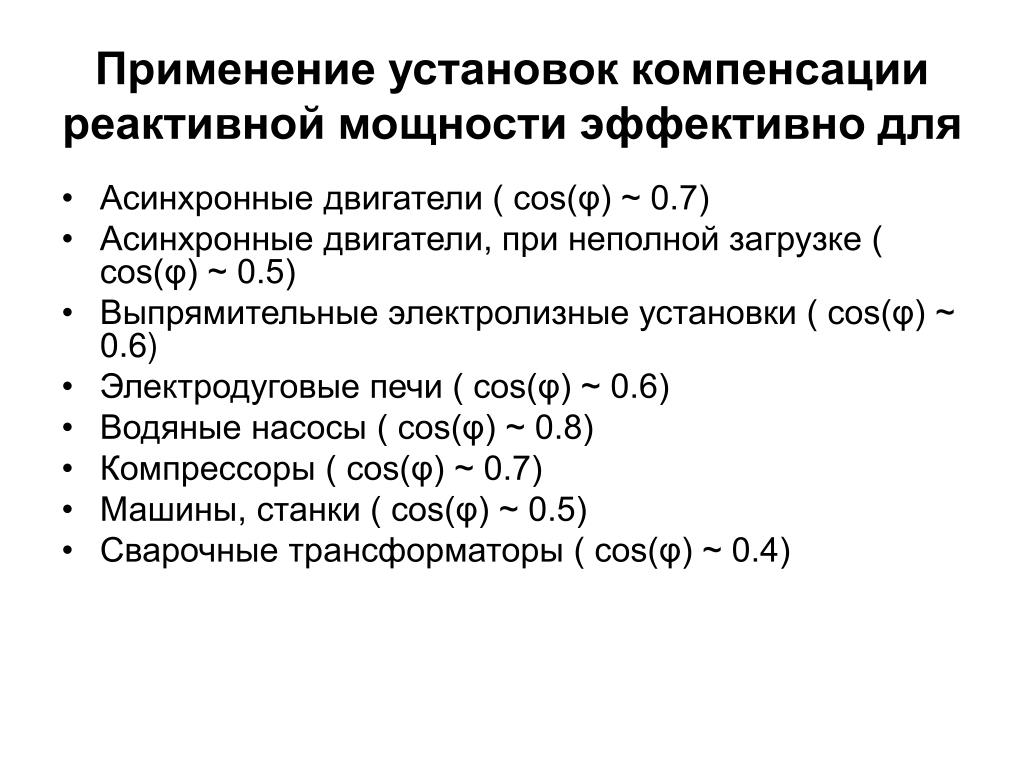
Таким образом, применение Конденсаторных установок остро необходимо на предприятиях, использующих:
- Асинхронные двигатели (cos(ɸ) ~0.
 7)
7) - Асинхронные двигатели, при неполной загрузке (cos(ɸ) ~0.5)
- Выпрямительные электролизные установки (cos(ɸ) ~0.6)
- Электродуговые печи(cos(ɸ) ~0.6)
- Индукционные печи(cos(ɸ) ~0,2-0.6)
- Водяные насосы(cos(ɸ) ~0.8)
- Компрессоры(cos(ɸ) ~0.7)
- Машины, станки(cos(ɸ) ~0.5)
- Сварочные трансформаторы(cos(ɸ) ~0.4)
- Лампы дневного света(cos(ɸ) ~0,5-0.6)
Для повышения коэффициента мощности применяют силовые конденсаторы и конденсаторные установки, являющиеся наиболее выгодными источниками получения реактивной мощности.
Плюсы от внедрения Установок компенсации реактивной мощности:
- Снижение потребления электроэнергии (от 10-20%, а при cos φ (0,5 и менее) потребность в электроэнергии может сократиться более чем на 30%)и как следствие уменьшение платежей (за счет «исключения» реактивной энергии из сети)
- Уменьшение нагрузки (до 30%) элементов распределительной сети (подводящих линий, трансформаторов и распределительных устройств), тем самым продлевается их срок службы
- Увеличение пропускной способности системы электроснабжения потребителя (от 30-40%), что позволит подключить дополнительные мощности без увеличения стоимости сетей.
Увеличение КМ решается подключением к сети конденсаторных батарей, производящих реактивную энергию в количестве, достаточном для компенсации реактивной мощности, возникающей в нагрузке.
Способы компенсации
Наиболее выгодный способ компенсации определяется конкретными условиями данного предприятия, и его выбор производится на основании технико-экономических расчетов и рекомендаций наших специалистов. Как правило, компенсация должна производиться в той же сети (на том же напряжении), к которой подключен потребитель, что обеспечивает минимальные потери.
Какие решения мы предлагаем
Наша Компания предлагает полный спектр услуг:
- Проведение выездных замеров параметров качества электроэнергии.
- Подготовка проекта, подбор необходимого оборудования с экономическим обоснованием его внедрения (с конкретными сроками окупаемости установок и денежной экономии).
- Изготовления оборудования, как серийного исполнения, так и нестандартного (учитывающую специфику конкретного предприятия).
- Проведение шеф монтажных работ, а также гарантийное и после гарантийное обслуживание.
Мы можем предложить как типовые решения, так и спроектировать, изготовить и внедрить на предприятии Заказчика уникальную систему компенсации реактивной мощности, учитывающую специфику конкретного предприятия.
В зависимости от потребности Заказчика установки могут изготавливаться как для внутренней, так и для уличной установки. Кроме этого возможен монтаж установок внутри утепленного блок-контейнера.
Для предприятий с резкопеременной нагрузкой (предприятия с большим количеством подъемно-транспортного оборудования, мощного сварочного оборудования и т.д.) мы предлагаем тиристорные конденсаторные установки, которые обеспечивают переключение ступеней конденсаторов с задержкой не более 20 мс.
| Преимущества использования УКРМ | Сферы применения |
|
|
Компенсация реактивной мощности ёмкостного характера
Capacitive reactive power compensation.
Реактивная мощность ёмкостного характера образуется при подключении конденсаторов, протяжённых кабельных линий, при работе перевозбуждённых синхронных машин и др.
Реактивной мощности ёмкостного характера соответствует реактивный ток, который геометрически складывается с активной составляющей тока и повышает полный ток в электроустановке. Дополнительный ток вызывает дополнительные потери, загружает источники и линии электропередачи и др.
Реактивная мощность ёмкостного характера может представлять большую опасность в системах автономного электроснабжения. Это связано с тем, что генератор автономного источника способен обеспечивать вполне определенную ёмкостную нагрузку. Обычно это 12–15 % от величины полной мощности. Превышение этого предела вызывает срабатывание защиты и отключение генератора.
Реактивная мощность ёмкостного характера на присоединениях вдольтрассовых кабельных линий трубопровода перекачки углеводородов.
Для страховки от подобных ситуаций на электростанции приходится запускать дополнительные источники (дизель-генераторы, ГПА и др. ). Это приводит к перерасходу топлива, расходных материалов, ресурса первичных двигателей и др.
). Это приводит к перерасходу топлива, расходных материалов, ресурса первичных двигателей и др.
Другой пример генерации реактивной мощности ёмкостного характера – работа пассивных фильтров ЭМС (Tuned filters).
| Пассивный фильтр ЭМС (справа) | Конденсаторы пассивного фильтра ЭМС |
При работе преобразователей частоты на долевых нагрузках конденсаторы пассивных фильтров ЭМС генерируют в сеть значительную реактивную мощность ёмкостного характера.
Активный фильтр решает задачи компенсации реактивной мощности ёмкостного и индуктивного характера сходным образом.
При работе в режиме динамической компенсации реактивной мощности требуется указать величину «целевого» коэффициента мощности. Высокое быстродействие активного фильтра позволяет устранить влияние источника реактивной мощности ёмкостного характера на коэффициент мощности всей электроустановки. В момент подачи питающего напряжения на конденсаторную батарею/кабельную линию/другой источник ёмкостной реактивной мощности активный фильтр мгновенно начинает генерировать реактивную мощность индуктивного характера для обеспечения постоянства коэффициента мощности в сети.
В момент подачи питающего напряжения на конденсаторную батарею/кабельную линию/другой источник ёмкостной реактивной мощности активный фильтр мгновенно начинает генерировать реактивную мощность индуктивного характера для обеспечения постоянства коэффициента мощности в сети.
Предложения Инженерного центра «АРТ».
Полный комплекс работ по созданию систем динамической компенсации реактивной мощности до 9000 квар на базе активных фильтров.
Отправить запрос.
Расчет компенсации реактивной мощности 0,4 кВ КРМ, УКРМ, АУКРМ, УКМ 58, КРМ-0,4
Контакты отдела продаж по конденсаторным установкам: (499) 653-69-37 (доб. 101), [email protected]
Калькулятор для расчета мощности конденсаторных установок 0,4 кВ
Для расчета необходимой мощности установки КРМ-0,4 заполните пожалуйста поля, приведенные ниже и нажмите кнопку «Рассчитать».
Формула расчета реактивной мощности КРМ
Q = Pa · ( tgφ1-tgφ2)- реактивная мощность установки КРМ (кВАр)
Q = Pa · K
Pa -активная мощность (кВт)
K- коэффициент из таблицы
Pa = S· cosφ
S -полная мощность(кВА)
cos φ — коэффициент мощности
tg(φ1+φ2) согласуются со значениями cos φ в таблице.
Таблица определения реактивной мощности конденсаторной установки — КРМ (кВАр), необходимой для достижения заданного cos(φ).
| Текущий (действующий) | Требуемый (достижимый) cos (φ) | ||||||||||
| tan (φ) | cos (φ) | 0.80 | 0.82 | 0.85 | 0.88 | 0.90 | 0.92 | 0.94 | 0.96 | 0.98 | 1.00 |
| Коэффициент K | |||||||||||
| 3.18 | 0.30 | 2.43 | 2.48 | 2.56 | 2.64 | 2.70 | 2.75 | 2.82 | 2.89 | 2.98 | 3.18 |
| 2.96 | 0.32 | 2.21 | 2.26 | 2.34 | 2.42 | 2. 48 48 | 2.53 | 2.60 | 2.67 | 2.76 | 2.96 |
| 2.77 | 0.34 | 2.02 | 2.07 | 2.15 | 2.23 | 2.28 | 2.34 | 2.41 | 2.48 | 2.56 | 2.77 |
| 2.59 | 0.36 | 1.84 | 1.89 | 1.97 | 2.05 | 2.10 | 2.17 | 2.23 | 2.30 | 2.39 | 2.59 |
| 2.43 | 0.38 | 1.68 | 1.73 | 1.81 | 1.89 | 1.95 | 2.01 | 2.07 | 2.14 | 2.23 | 2.43 |
| 2.29 | 0.40 | 1.54 | 1.59 | 1.67 | 1.75 | 1.81 | 1.87 | 1.93 | 2.00 | 2.09 | 2.29 |
| 2.16 | 0.42 | 1.41 | 1. 46 46 | 1.54 | 1.62 | 1.68 | 1.73 | 1.80 | 1.87 | 1.96 | 2.16 |
| 2.04 | 0.44 | 1.29 | 1.34 | 1.42 | 1.50 | 1.56 | 1.61 | 1.68 | 1.75 | 1.84 | 2.04 |
| 1.93 | 0.46 | 1.18 | 1.23 | 1.31 | 1.39 | 1.45 | 1.50 | 1.57 | 1.64 | 1.73 | 1.93 |
| 1.83 | 0.48 | 1.08 | 1.13 | 1.21 | 1.29 | 1.34 | 1.40 | 1.47 | 1.54 | 1.62 | 1.83 |
| 1.73 | 0.50 | 0.98 | 1.03 | 1.11 | 1.19 | 1.25 | 1.31 | 1.37 | 1.45 | 1.63 | 1.73 |
1. 64 64 | 0.52 | 0.89 | 0.94 | 1.02 | 1.10 | 1.16 | 1.22 | 1.28 | 1.35 | 1.44 | 1.64 |
| 1.56 | 0.54 | 0.81 | 0.86 | 0.94 | 1.02 | 1.07 | 1.13 | 1.20 | 1.27 | 1.36 | 1.56 |
| 1.48 | 0.56 | 0.73 | 0.78 | 0.86 | 0.94 | 1.00 | 1.05 | 1.12 | 1.19 | 1.28 | 1.48 |
| 1.40 | 0.58 | 0.65 | 0.70 | 0.78 | 0.86 | 0.92 | 0.98 | 1.04 | 1.11 | 1.20 | 1.40 |
| 1.33 | 0.60 | 0.58 | 0.63 | 0.71 | 0.79 | 0.85 | 0.91 | 0.97 | 1. 04 04 | 1.13 | 1.33 |
| 1.30 | 0.61 | 0.55 | 0.60 | 0.68 | 0.76 | 0.81 | 0.87 | 0.94 | 1.01 | 1.10 | 1.30 |
| 1.27 | 0.62 | 0.52 | 0.57 | 0.65 | 0.73 | 0.78 | 0.84 | 0.91 | 0.99 | 1.06 | 1.27 |
| 1.23 | 0.63 | 0.48 | 0.53 | 0.61 | 0.69 | 0.75 | 0.81 | 0.87 | 0.94 | 1.03 | 1.23 |
| 1.20 | 0.64 | 0.45 | 0.50 | 0.58 | 0.66 | 0.72 | 0.77 | 0.84 | 0.91 | 1.00 | 1.20 |
| 1.17 | 0.65 | 0.42 | 0.47 | 0.55 | 0.63 | 0. 68 68 | 0.74 | 0.81 | 0.88 | 0.97 | 1.17 |
| 1.14 | 0.66 | 0.39 | 0.44 | 0.52 | 0.60 | 0.65 | 0.71 | 0.78 | 0.85 | 0.94 | 1.14 |
| 1.11 | 0.67 | 0.36 | 0.41 | 0.49 | 0.57 | 0.63 | 0.68 | 0.75 | 0.82 | 0.90 | 1.11 |
| 1.08 | 0.68 | 0.33 | 0.38 | 0.46 | 0.54 | 0.59 | 0.65 | 0.72 | 0.79 | 0.88 | 1.08 |
| 1.05 | 0.69 | 0.30 | 0.35 | 0.43 | 0.51 | 0.56 | 0.62 | 0.69 | 0.76 | 0.85 | 1.05 |
| 1.02 | 0.70 | 0.27 | 0. 32 32 | 0.40 | 0.48 | 0.54 | 0.59 | 0.66 | 0.73 | 0.82 | 1.02 |
| 0.99 | 0.71 | 0.24 | 0.29 | 0.37 | 0.45 | 0.51 | 0.57 | 0.63 | 0.70 | 0.79 | 0.99 |
| 0.96 | 0.72 | 0.21 | 0.26 | 0.34 | 0.42 | 0.48 | 0.54 | 0.60 | 0.67 | 0.76 | 0.96 |
| 0.94 | 0.73 | 0.19 | 0.24 | 0.32 | 0.40 | 0.45 | 0.51 | 0.58 | 0.65 | 0.73 | 0.94 |
| 0.91 | 0.74 | 0.16 | 0.21 | 0.29 | 0.37 | 0.42 | 0.48 | 0.55 | 0.62 | 0.71 | 0.91 |
0. 88 88 | 0.75 | 0.13 | 0.18 | 0.26 | 0.34 | 0.40 | 0.46 | 0.52 | 0.59 | 0.68 | 0.88 |
| 0.86 | 0.76 | 0.11 | 0.16 | 0.24 | 0.32 | 0.37 | 0.43 | 0.50 | 0.57 | 0.65 | 0.86 |
| 0.83 | 0.77 | 0.08 | 0.13 | 0.21 | 0.29 | 0.34 | 0.40 | 0.47 | 0.54 | 0.63 | 0.83 |
| 0.80 | 0.78 | 0.05 | 0.10 | 0.18 | 0.26 | 0.32 | 0.38 | 0.44 | 0.51 | 0.60 | 0.80 |
| 0.78 | 0.79 | 0.03 | 0.08 | 0.16 | 0.24 | 0.29 | 0.35 | 0.42 | 0. 49 49 | 0.57 | 0.78 |
| 0.75 | 0.80 | 0.05 | 0.13 | 0.21 | 0.27 | 0.32 | 0.39 | 0.46 | 0.55 | 0.75 | |
| 0.72 | 0.81 | 0.10 | 0.18 | 0.24 | 0.30 | 0.36 | 0.43 | 0.52 | 0.72 | ||
| 0.70 | 0.82 | 0.08 | 0.16 | 0.21 | 0.27 | 0.34 | 0.41 | 0.49 | 0.70 | ||
| 0.67 | 0.83 | 0.05 | 0.13 | 0.19 | 0.25 | 0.31 | 0.38 | 0.47 | 0.67 | ||
| 0.65 | 0.84 | 0.03 | 0.11 | 0.16 | 0.22 | 0. 29 29 | 0.36 | 0.44 | 0.65 | ||
| 0.62 | 0.85 | 0.08 | 0.14 | 0.19 | 0.26 | 0.33 | 0.42 | 0.62 | |||
| 0.59 | 0.86 | 0.05 | 0.11 | 0.17 | 0.23 | 0.30 | 0.39 | 0.59 | |||
| 0.57 | 0.87 | 0.08 | 0.14 | 0.21 | 0.28 | 0.36 | 0.57 | ||||
| 0.54 | 0.88 | 0.06 | 0.11 | 0.18 | 0.25 | 0.34 | 0.54 | ||||
| 0.51 | 0.89 | 0.03 | 0.09 | 0. 15 15 | 0.22 | 0.31 | 0.51 | ||||
| 0.48 | 0.90 | 0.06 | 0.12 | 0.19 | 0.28 | 0.48 | |||||
| 0.46 | 0.91 | 0.03 | 0.10 | 0.17 | 0.25 | 0.46 | |||||
| 0.43 | 0.92 | 0.07 | 0.14 | 0.22 | 0.43 | ||||||
| 0.40 | 0.93 | 0.04 | 0.11 | 0.19 | 0.40 | ||||||
| 0.36 | 0.94 | 0.07 | 0. 16 16 | 0.36 | |||||||
| 0.33 | 0.95 | 0.13 | 0.33 | ||||||||
Пример:
Активная мощность двигателя : P=200 кВт
Действующий cos φ = 0,61
Требуемый cos φ = 0,96
Коэффициент K из таблицы = 1,01
Необходимая реактивная мощность КРМ (кВАр): Q = 200 х 1,01=202 кВАр
Установки компенсации реактивной мощности серии УКРМ-МЭТЗ-10
Установки компенсации реактивной мощности (УКРМ) серии УКРМ-МЭТЗ-10 предназначены для повышения значения коэффициента мощности в электрических распределительных сетях трехфазного переменного тока частотой 50 Гц на номинальное напряжение 6(10) кВ.
Установки компенсации реактивной мощности серии УКРМ-МЭТЗ-10 обладают следующими преимуществами:
- Высокая надежность;
- Длительный срок службы
- Относительно малые размеры и масса;
- Стойкость к воздействиям окружающей среды.

УКРМ-МЭТЗ-10 состоит из отдельных шкафов с коммутационными аппаратами и другой высоковольтной комплектующей аппаратурой, с приборами измерения, устройствами автоматики и защиты, а также аппаратурой управления, сигнализации и другими вспомогательными устройствами.
Шкаф УКРМ-МЭТЗ-10 представляет собой металлоконструкцию, изготовленную из высококачественной оцинкованной стали, детали которой изготовлены на высокоточном оборудовании методом холодной штамповки. Соединения выполнены на усиленных стальных вытяжных заклепках и резьбовых соединениях. Наружные элементы конструкции – двери фасада, боковые панели крайних в ряду шкафов и т.д. окрашены методом порошкового напыления (цвет RAL 9016).
Установка компенсации реактивной мощности УКРМ-МЭТЗ-10 состоит из шкафа ввода и шкафов фиксированной и регулируемой ступени, количество которых зависит от мощности установки.
Цепи напряжения и тока для устройства управления компенсацией могут использоваться как с РУ 6 … 10кВ, так и от измерительных трансформаторов высокой стороны, например, 35 и 110 кВ.
Шкаф ввода УКРМ-МЭТЗ может быть выполнен с глухим присоединением кабеля, с разъединителем, с вакуумным выключателем, либо по индивидуальным требованиям заказчика. При выполнении ячейки с глухим присоединением или разъединителем все команды на отключение УКРМ-МЭТЗ-10 воздействуют на питающую ячейку в РУ 6 … 10кВ.
В части воздействия факторов внешней среды шкафы УКРМ-МЭТЗ-10 соответствуют климатическому исполнению У3 по ГОСТ 15150-69 и по ГОСТ 15543.1-89, при этом рабочий диапазон температуры окружающего воздуха от минус 25 °С до плюс 40 °С. УКРМ-МЭТЗ климатического исполнения У1 поставляется в блочно-модульном здании.
Степень защиты по ГОСТ 14254-96 – IP31, IP54*.
Номинальные значения климатических факторов:
- Высота над уровнем моря не более 1000 м.
- При температуре -25°С и ниже необходимо осуществлять подогрев помещения, в котором находится установка компенсации реактивной мощности. Для обеспечения нормальной работы аппаратуры в релейном шкафу может быть предусмотрен обогрев.

- Окружающая среда невзрывоопасная; не содержащая газов, насыщенных токопроводящей пылью; паров и химических отложений, вредных для изоляции токоведущих частей, которые бы ухудшали параметры шкафов УКРМ в недопустимых пределах (атмосфера II по ГОСТ 15150-69).
- В части воздействия механических факторов внешней среды шкафы УКРМ соответствуют группе М39 по ГОСТ 17516.1-90.
- Шкафы УКРМ сейсмостойки для видов климатического исполнения У3 ГОСТ 15150-69, при воздействии землетрясений интенсивностью 7 баллов по MSK-64 при уровне установки над нулевой отметкой до 29 м и соответствуют требованиям НП-031-01 «Нормы проектирования сейсмостойких атомных станций» для категории сейсмостойкости II.
- Уровень изоляции УКРМ соответствует требованиям ГОСТ 1516.3-96.
: Практическое руководство
Предисловие и благодарности xiii
1 Основы реактивной мощности 1
1.1 Обзор главы 1
1. 2 Фазоры и векторные диаграммы 1
2 Фазоры и векторные диаграммы 1
1.3 Определение различных типов мощности 4
1.4 Определение мощности для несинусоидальных токов и напряжения 6
1.5 Эквивалентная механическая модель для индуктивности 9
1.6 Эквивалентная механическая модель для емкости 11
1.7 Омический и реактивный ток 12
1.8 Обзор 13
Ссылки 13
2 Потребители реактивной мощности 15
2.1 Обзор главы 15
2.2 Потребление реактивной энергии 15
2.3 Упрощенная модель: последовательный потребитель реактивной мощности 16
2.4 Реалистичная модель: смешанная параллельная и последовательная реактивная мощность 16
2.5 Потребительская реактивная мощность 17
2.5.1 Асинхронные двигатели 17
2.5.2 Трансформаторы 18
2.5.3 ПРА (балласт) для газоразрядных ламп 18
2.6 Резюме 21
3 Влияние реактивной мощности на производство, передачу и распределение электроэнергии 23
3. 1 Обзор главы 23
1 Обзор главы 23
3.2 Нагрузка генераторов и оборудования 23
3.3 Потери в энергосистеме 24
3.4 Генераторы 27
3.5 Падение напряжения 28
3.5.1 Общие положения 28
3.5.2 Передаваемая мощность линий и падение напряжения 29
3.5.3 Падение напряжения на трансформаторе 32
3.6 Доступная мощность трансформаторов 34
3.7 Резюме 35
4 Реактивная мощность в стандартных энергетических контрактах 37
4.1 Обзор главы 37
4.2 Введение 37
4.3 Реактивная энергия, которую следует учитывать в Стандартизированные контракты поставщиков 38
4.3.1 Ценообразование в зависимости от потребляемой реактивной энергии (кварч) 38
4.3.2 Ценообразование в зависимости от потребляемой полной энергии (кВАч) 40
4.4 Важность реактивной мощности при определении затрат на подключение 42
4.5 Резюме 42
Ссылка 42
5 Методы определения реактивной мощности и коэффициента мощности 43
5. 1 Обзор главы 43
1 Обзор главы 43
5.2 Методы 43
5.2.1 Определение коэффициента мощности в однофазных сетях 43
5.2.2 Прямая индикация коэффициента мощности с помощью устройства Брюгера 44
5.2.3 Определение коэффициента мощности в трехфазной системе 44
5.2.4 Определение коэффициента мощности с помощью портативного измерительного оборудования 46
5.2.5 Определение мощности (коэффициента) по записанным данным 48
5.2.6 Определение коэффициента мощности с помощью счетчика активной энергии 48
5.2.7 Определение мощности Коэффициент с помощью счетчика активной и реактивной энергии 49
5.2.8 Определение коэффициента мощности по счету за электроэнергию 50
5.3 Резюме 51
6 Улучшение коэффициента мощности 53
6.1 Обзор главы 53
6.2 Основы компенсации реактивной мощности 53
6.3 Ограничение реактивной мощности без фазового сдвига 55
6.4 Компенсация реактивной мощности вращающимися фазосдвигающими машинами 55
6. 5 Компенсация реактивной мощности с помощью конденсаторов 56
5 Компенсация реактивной мощности с помощью конденсаторов 56
6.6 Резюме 58
7 Конструкция, расположение и мощность конденсаторов 61
7.1 Обзор главы 61
7.2 Основные сведения о конденсаторах 61
7.3 Реактивная мощность конденсаторов 64
7.4 Различные технологии производства конденсаторов 65
7.4.1 Конденсаторы с бумажной изоляцией 65
7.4.2 Конденсаторы с металлизированной бумагой (конденсатор MP) 65
7.4.3 Конденсаторы с металлизированной пластиковой пленкой 66
7.5 Расположение и реактивная мощность конденсаторов 66
7.5.1 Конденсаторы, подключенные параллельно 67
7.5.2 Конденсаторы, подключенные последовательно 67
7.5.3 Соединение силовых конденсаторов звездой и треугольником 68
7.6 Конструкция конденсаторов среднего напряжения 69
7.7 Долговременная стабильность и старение конденсаторных установок 69
7.7.1 Общие положения 69
7.7.2 Влияние рабочего напряжения 70
7. 7.3 Старение в случае расстроенных конденсаторов 72
7.3 Старение в случае расстроенных конденсаторов 72
7.7.4 Старение из-за операций переключения 73
7.8 Резюме 73
Ссылки 73
8 Определение требуемой мощности конденсаторов 75
8.1 Обзор главы 75
8.2 Основы расчета 75
8.3 Определение компенсации на новых проектируемых предприятиях 79
8.4 Резюме 85
Ссылка 85
9 Типы компенсации реактивной мощности 87
9.1 Обзор главы 87
9.2 Одинарная компенсация 87
9.2.1 Однотипная компенсация в асинхронных двигателях 88
9.2.2 Однотипная компенсация трансформаторов 97
9.2.3 Однотипная компенсация реактивной мощности для сварочных трансформаторов 99
9.2.4 Компенсация одинарного типа люминесцентных ламп 103
9.3 Компенсация объемного типа 108
9.4 Компенсация центрального типа 111
9,5 Смешанная компенсация 112
9.6 Преимущества и недостатки различных типов компенсации 113
9,7 Резюме 115
Ссылка 115
10 Компенсация существующим установкам 117
10. 1 Обзор главы 117
10.2 Методы определения реактивной мощности для внутренней линии 117
10.3 Расчет блока расширения посредством счетов-фактур за энергию 118
10.4 Сводка 121
11 Управление реактивной мощностью 123
11.1 Обзор главы 123
11.2 Общие 123
11.2.1 Блоки компенсации реактивной мощности 124
11.3 Управление реактивной мощностью с помощью автоматических регуляторов реактивной мощности 124
11.3.1 Общие положения 124
11.3.2 Количество ступеней и реактивная мощность ступеней конденсатора 125
11.3.3 Пороговое значение C / k 131
11.3.4 Схема обратного управления (линия cos ϕd) 133
11.3.5 Автоматическое регулирование реактивной мощности 135
11.3.6 Функция отключения без напряжения 137
11.4 Как подключить Реле коэффициента мощности 137
11.5 Управление реактивной мощностью с помощью «смешанного измерения» 138
11.6 Управление реактивной мощностью с несколькими вводами 140
11. 6.1 Измерение с помощью суммирующего трансформатора тока 140
6.1 Измерение с помощью суммирующего трансформатора тока 140
11.6.2 параллельных работы компенсационных банков для каждой входящей поставки 142
11.7 Характеристики автоматических компенсационных банков 144
11.8 Сводка 146
12 разрядных устройств для силовых конденсаторов 147
12.1 Обзор главы 147
12.2 Основы приложений LV
12.2.1 Быстрая разрядка с включенными дополнительными сопротивлениями 150
12.2.2 Разрядка конденсаторов с помощью реакторов 150
12.3 Разрядные устройства в конденсаторах среднего напряжения 152
12.3.1 Конденсаторы среднего напряжения, разряжаемые через сопротивления 152
12.3.2 Конденсаторы среднего напряжения, разряжаемые реакторами 154
12.4 Расчет электрического заряда, сохраняемого на конденсаторе среднего напряжения 154
12.5 Сводка 156
13 Защита конденсаторов и компенсации 157
13.1 Обзор главы 157
13.2 Защита от перегрузки по току и короткого замыкания 157
13. 3 Защита от перенапряжения 158
3 Защита от перенапряжения 158
13.4 Защита от перегрева 158
13.5 Защита от внутренних неисправностей 158
13.5.1 Защита от пробоя напряжения 159
13.5.2 Технология самовосстановления 159
13.5.3 Защита от перегрева и внутреннего избыточного давления 159
13.6 Защита с помощью наблюдения за балансом на однофазных конденсаторах среднего напряжения 162
13.7 Резюме 163
Ссылка 163
14 Переключение конденсаторов 165
14.1 Обзор главы 165
14.2 Общие сведения 165
14.3 Выбор распределительного устройства 167
14.3.1 Воздушные контакторы 168
14.3.2 Автоматические выключатели 169
14.3.3 Выключатели предохранителей и магнитные расцепители 169
14.4 Переключение полупроводников ( Тиристорные модули) 169
14.4.1 Общие сведения 169
14.4.2 Статические контакторы для коммутации конденсаторов до 415 В 171
14.4.3 Статические контакторы для коммутации конденсаторов на номинальное напряжение выше 500 В 173
14. 4.4 Реле коэффициента мощности для статических контакторов 173
4.4 Реле коэффициента мощности для статических контакторов 173
14.4.5 Динамическая компенсация реактивной мощности (готово к установке) 174
14.5 Сводка 175
Ссылка 175
15 Установка, неисправности и обслуживание 177
15.1 Обзор главы 177
15.2 Установка автоматически управляемых компенсационных банков 177
15.3 Автоматические компенсационные банки: ввод в эксплуатацию 178
15.3.1 Выбор трансформатора тока (ТТ) и определение кабеля ТТ 178
15.3.2 Предустановленное время задержки переключения на ступень конденсатора 183
15.4 Неисправности и способы их устранения 184
15.5 Эксплуатация и техническое обслуживание 185
15,6 Резюме 187
Справочная информация 187
16 Компенсация реактивной мощности в электрических установках с генераторами 9000 189
16.1 Обзор главы 189
16.2 Общие сведения 189
16.3 Автоматический контроль реактивной мощности в четырех квадрантах 190
16. 3.1 Технические аспекты 190
3.1 Технические аспекты 190
16.3.2 Вопросы переговоров 192
16.4 Резюме 193
Ссылки 194
17 Влияние возмущений, особенно влияние гармоник на конденсаторы коррекции коэффициента мощности 195
17.1 Обзор главы 195
17.2 Нарушения качества электроэнергии для бизнеса и повышение качества электроэнергии 196
17.3 Измерение и анализ 198
17.4 Резюме 203
Ссылки 204
18 Резонансы в электроэнергетических системах 205
18.1 Обзор главы 205
18.2 Параллельная резонансная цепь 205
18.3 Последовательная резонансная цепь 208
18.4 Типичные резонансы в энергосистемах 208
18.4.1 Резонанс из-за компенсации реактивной мощности в системе 6 кВ 208
18.4.2 Параллельный резонанс в промышленной системе 30 кВ 210
18.4.3 Импеданс в городской системе 10 кВ 212
18,5 Сводка 212
Ссылка 212
19 Конденсаторы с реакторной защитой и схемы фильтров 213
19. 1 Обзор главы 213
1 Обзор главы 213
19.2 Влияние систем с реакторной защитой и конфигурации системы 214
19.2.1 Влияние систем с реакторной защитой 214
19.2.2 Конфигурация системы конденсаторных батарей с реакторной защитой 217
19.3 Примечания к выбору реакторов 220
19,4 Влияние скорости реактора на срок службы конденсатора 222
19,5 Эффект фильтра с расстроенными фильтрами 223
19,6 Цепи фильтров 225
19.6.1 Общие 225
19.6.2 Активные фильтры 227
19.6.3 Пассивные фильтры 229
19.6.4 Сравнение активных и пассивных фильтров 233
19.7 Фильтрация гармоник нейтральной линии 233
19.7.1 Общие 233
19.7. 2 Особенности третьей гармоники 234
19.7.3 Разгрузка сети с помощью фильтра гармоник нейтральной линии 235
19.8 Резюме 238
Ссылки 239
20 Системы динамической компенсации реактивной мощности 241
20.1 Обзор главы 241
20.1.1 Повышение качества электроэнергии с помощью систем динамической компенсации реактивной мощности 242
20. 2 Компенсация запуска двигателя 245
2 Компенсация запуска двигателя 245
20.3 Компенсация мерцания 245
20.4 Оценка решений по коррекции коэффициента мощности с точки зрения оператора системы распределения ( Электроснабжение) 251
20,5 Сводка 252
Ссылки 252
21 Эффекты компенсации на выпрямителях 253
21.1 Обзор главы 253
21.1.1 Общие положения 253
21.2 Компенсационный банк на шестипульсном выпрямителе 254
21.2.1 Временные графики напряжения и тока на трехфазном мостовом выпрямителе 256
21.2.2 Как Компенсационные банки влияют на трехфазные выпрямители с мостовым подключением 257
21.3 Характеристика поведения контроллеров реактивной мощности на выпрямителях 260
21.4 Резюме 261
Ссылки 261
22 Защита окружающей среды и климата с помощью конденсаторов 263
.1 Обзор главы 263
22.2 Конденсаторы с печатной платой 263
22.3 Изменение климата и энергоэффективность за счет коррекции коэффициента мощности 264
22. 4 Резюме 267
4 Резюме 267
Ссылки 267
Символы и сокращения 269
Индекс компенсации 273
Системы распределения посредством интеграции DSTATCOM на основе домена графа облигаций
Салгадо-Эррера, Нью-Мексико; Кампос-Гаона, Д .; Анайа-Лара, О .; Медина-Риос, А.; Tapia-Sánchez, R .; Родригес-Родригес, Дж. Р.: Снижение THD в ветроэнергетической системе с использованием ветряной турбины типа 4 / PMSG с применением активного входного преобразователя в параллельном режиме. Энергия 11 , 2458 (2018)
Статья Google ученый
Ян, Р .; Marais, B .; Кумар-Саха, Т .: Влияние колебаний фотоэлектрической мощности в жилых домах на работу устройства РПН и решение с использованием DSTATCOM. Электр. Power Syst. Res. 111 , 185–193 (2014)
Статья Google ученый
 org/ScholarlyArticle»> 3.
org/ScholarlyArticle»> 3.Badoud, A.E .; Хемличе, М .; Ould Bouamama, B .; и др .: Алгоритмы графа Бонда для обнаружения и изоляции неисправностей при преобразовании энергии ветра. Arab J Sci Eng 39 (5), 4057–4076 (2014)
Статья Google ученый
Emiroglu, S .; Уяроглу, Ю .; Оздемир, Г .: Распределенное управление реактивной мощностью на основе снижения напряжения сохранения в активных распределительных системах.Adv. Электр. Comput. Англ. 17 (4), 99–106 (2017)
Статья Google ученый
da Cunha, J.C .; Hock, R.T .; Garcia Oliveira, S.V .; Michels, L .; Мезароба, М .: Новая схема управления для снижения реактивной мощности, обрабатываемой многофункциональным регулятором качества напряжения. Электр. Power Syst. Res. Часть А 163 , 348–355 (2018)
Электр. Power Syst. Res. Часть А 163 , 348–355 (2018)
Статья Google ученый
Singh, B .; Соланки, Дж .: Сравнение алгоритмов управления для DSTATCOM. IEEE Trans. Ind. Electron. 56 (7), 2738–2745 (2009)
Статья Google ученый
Li, S .; Xu, L .; Хаскью, Т.А.: Управление STATCOM на основе VSC с использованием традиционных стратегий векторного управления и постоянного тока. Электр. Power Energy Syst. 45 , 175–186 (2013)
Статья Google ученый
Safari, A .; Ахмадиан, А .; Голкар М.А.: Разработка контроллера STATCOM для улучшения стабильности энергосистемы с использованием оптимизации спаривания медоносных пчел. J. Appl. Res. Технол 11 , 144–155 (2013)
J. Appl. Res. Технол 11 , 144–155 (2013)
Артикул Google ученый
Yildiz, İ .; Ömürlü, V.E .; Sağirli, A .: Моделирование и экспериментальная проверка обобщенной платформы Стюарта методом графа связей. Араб. J. Sci. Англ. 38 (10), 2875–2890 (2013)
Артикул Google ученый
Бен-Али, С .: Моделирование испарителя с двойным эффектом: подход графа связей. Chem. Англ. Res. Des. 138 , 554–567 (2018)
Статья Google ученый
Gawthrop, P.J .: Графическое моделирование хемиосмотической биомолекулярной передачи энергии. IEEE Trans. Nano Biosci. 16 (3), 177–188 (2017)
IEEE Trans. Nano Biosci. 16 (3), 177–188 (2017)
Статья Google ученый
Мешрам, Р.V .; Khade, S.V .; Wagh, S.R .; Singh, N.M .; Станкович, A.M .: Подход графа Бонда для гамильтонова моделирования с портом для SST. Электр. Power Syst. Res. 158 , 105–114 (2018)
Статья Google ученый
Olivier, P .; Bourasseau, C .; Боуамама, Б.: Динамическое и мультифизическое моделирование системы электролиза PEM: подход графа связей. Int. J. Hydrog. Энергетика 42 (22), 14872–14904 (2017)
Статья Google ученый

Benchouia, N.E .; Elias, H.A .; Хочемане, Л .; Махма, Б .: Разработка подхода к моделированию графа Бонда для систем PEMFC топливных элементов. Int. J. Hydrog. Энергетика 39 (27), 15224–15231 (2014)
Статья Google ученый
Junco, S .; Diéguez, G .; Рамирес, Ф .: Моделирование коммутации в графах облигаций. Simul. Сер. 39 (1), 12 (2007)
Google ученый
Sanchez, R .; Dauphin-Tanguy, G .; Гийо, X .; Колас, Ф .: Управление трехфазным VSC с LC-фильтром на основе графа Бонда — подключение к пассивным и активным нагрузкам. Simul. Модель. Практик. Теория 18 (9), 1185–1198 (2010)
Статья Google ученый
 org/ScholarlyArticle»> 17.
org/ScholarlyArticle»> 17.Salgado-Herrera, N.M .; Медина-Риос, А .; Тапиа-Санчес, Р .: Компенсация реактивной мощности в ветроэнергетических системах с помощью резонансного корректора в распределенном статическом компенсаторе.Электр. Power Compon. Syst. 45 (17), 1859–1869 (2017)
Статья Google ученый
Янмаз, К .; Altas, I.H .; Менги, О.О .: Пятиуровневый каскадный H-мост D-STATCOM с использованием новой модели нечетких и PI-контроллеров для ветроэнергетических систем. Adv. Электр. Comput. Англ. 17 (4), 49–58 (2017)
Статья Google ученый
Salgado-Herrera, N.М .; Medina-Ríos, J.A .; Tapia-Sánchez, R .; Анайа-Лара, О .; Родригес-Родригес, Дж. Р.: 27-уровневый многоуровневый метод DSPWM, основанный на FPGA, для работы с каскадным преобразователем мощности постоянного / переменного тока. Int. Пер. Электр. Energy Syst. 28 , e2479 (2018)
Int. Пер. Электр. Energy Syst. 28 , e2479 (2018)
Статья Google ученый
Chhabra, R .; Эмами, М.Р .: Моделирование целостных систем в мехатронике. Мехатроника 21 (1), 166–175 (2011)
Артикул Google ученый
Gawthrop, P .: График двухкаузальных облигаций. Proc. Int. Конф. Модель графа Бонда. Simul. ICBGM’95 27 , 83–88 (1995)
Google ученый
Benmansour, S; Бенабдельхафид, А .: Вычислительные возможности, связанные с графической моделью транспортной системы. Mediterr. J. Meas. Контроль. 7 (2011)
 org/ScholarlyArticle»> 23.
org/ScholarlyArticle»> 23.Chen, W.L .; Цзян Б.Я .: Подавление гармоник и повышение производительности для небольшой ветряной турбины, подключенной к сети, с использованием пропорционально-резонансных контроллеров.Электр. Power Compon. Syst. 43 (8–10), 970–981 (2015). https://doi.org/10.1080/15325008.2014.978051
Артикул Google ученый
Lai, Y .; Ю.М .: Онлайн-методика автонастройки частоты переключения резонансного преобразователя с учетом допусков и вариаций резонансных компонентов. IEEE J. Emerg. Sel. Темы Power Electron. 6 (4), 2315–2324 (2018)
Статья Google ученый
Goel, N .; Patel, R.N .; Чако, С.Т .: Генетически настроенный СТАТКОМ для управления напряжением и компенсации реактивной мощности. Int. J. Comput. Теория англ. 2 (3), 345–351 (2010)
Int. J. Comput. Теория англ. 2 (3), 345–351 (2010)
Статья Google ученый
Сим. www.20sim.com. По состоянию на 8 сентября (2018 г.).
Opal Rt. www.opal-rt.com. По состоянию на 13 мая (2018 г.).
Компенсация реактивной мощности — Etigroup
Коррекция коэффициента мощности — одно из лучших вложений для снижения затрат на электроэнергию с быстрой окупаемостью.Во многих случаях работа по проектированию и определению размеров осложнялась тем фактом, что во внутренних низковольтных установках компании, а также в сетях среднего напряжения, питающих их, увеличилась доля сетевых гармоник. все больше за последние несколько лет.
Преобразователи энергии, приводы с электронным управлением, статические преобразователи частоты, телевизоры и компьютеры подают гармонические токи в сеть питания. Эти гармоники могут усиливаться импедансом сети и установленными конденсаторами.Отсутствие гармоник также сводит к минимуму помехи для других устройств, питающихся от того же источника.
Эти гармоники могут усиливаться импедансом сети и установленными конденсаторами.Отсутствие гармоник также сводит к минимуму помехи для других устройств, питающихся от того же источника.
Низковольтная продукция для лучшего качества электроэнергии и повышения эффективности сети.
Новинка !!!Информативный расчет экономии при использовании банков автоматической коррекции коэффициента мощности. Щелкните здесь | |||
Оборудование компенсации мощности ETI Prostik (корпуса) помогает клиентам повысить производительность за счет экономии энергии и лучшего качества электроэнергии.Благодаря нашим продуктам и решениям клиенты экономят деньги и снижают воздействие своей деятельности на окружающую среду.
Мы предлагаем широкий спектр оборудования для компенсации мощности для низких уровней напряжения. Мы анализируем ваши потребности и разрабатываем правильные решения для оптимальной эффективности и экономии.
Ключевые преимущества:
- „„ Уменьшение гармоник
- „„ Компактные решения
- „„ Низкие потери
- „„ Повышенное качество электроэнергии
- „„ Экономия денег
Коэффициент мощности
Коэффициент мощности способ описания того, насколько эффективно потребляется электроэнергия.
Коррекция коэффициента мощности формирует входной ток автономных источников питания для максимизации реальной мощности, доступной от сети. В идеале, электрический прибор должен представлять нагрузку, имитирующую чистый резистор, и в этом случае реактивная мощность, потребляемая устройством, равна нулю. Этому сценарию присуще отсутствие гармоник входного тока — ток является точной копией входного напряжения (обычно синусоидальной волны) и точно совпадает с ним по фазе. В этом случае ток, потребляемый от сети, является минимальным для реальной мощности, необходимой для выполнения необходимой работы, и это сводит к минимуму потери и затраты, связанные не только с распределением мощности, но также с выработкой электроэнергии и капитальное оборудование, задействованное в процессе.
Коррекция коэффициента мощности определяется просто как отношение активной мощности к полной, или:
PF = активная мощность (выраженная в ваттах) / полная мощность (выраженная в ВА),
, где действительная мощность является средней, в течение цикла мгновенного произведения тока и напряжения, а полная мощность — это произведение действующего значения тока на действующее значение напряжения. Если и ток, и напряжение синусоидальны и синфазны, коэффициент мощности равен 1,0. Если оба имеют синусоидальную форму, но не совпадают по фазе, коэффициент мощности представляет собой косинус фазового угла.На начальных курсах по электричеству это иногда преподается как определение коэффициента мощности, но оно применяется только в особых случаях, когда и ток, и напряжение являются чистыми синусоидальными волнами. Это происходит, когда нагрузка состоит из резистивных, емкостных и индуктивных элементов, и все они линейны (инвариантны по току и напряжению).
 o.o.
o.o.  Эти индуктивные нагрузки обычно представляют собой электромагнитные цепи электродвигателей, электрические трансформаторы, индуктивность передающих и распределительных сетей, индукционные печи, люминесцентные лампы и т. Д.Эта реактивная мощность должна быть должным образом скомпенсирована, в противном случае отношение фактической мощности, потребляемой нагрузкой, к общей мощности, то есть векторной суммы активной и реактивной мощности, системы станет значительно меньше.
Эти индуктивные нагрузки обычно представляют собой электромагнитные цепи электродвигателей, электрические трансформаторы, индуктивность передающих и распределительных сетей, индукционные печи, люминесцентные лампы и т. Д.Эта реактивная мощность должна быть должным образом скомпенсирована, в противном случае отношение фактической мощности, потребляемой нагрузкой, к общей мощности, то есть векторной суммы активной и реактивной мощности, системы станет значительно меньше. Следовательно, если этот коэффициент мощности имеет меньше клапана, соответствующий ток (I) увеличивается при той же активной мощности P.
Следовательно, если этот коэффициент мощности имеет меньше клапана, соответствующий ток (I) увеличивается при той же активной мощности P. Благодаря этому преимуществу регулирования синхронные конденсаторы очень подходят для корректировки коэффициента мощности системы, но это оборудование довольно дорогое по сравнению со статическими конденсаторами. Вот почему синхронные конденсаторы оправдано использовать только для регулирования напряжения в системе передачи очень высокого напряжения.
Благодаря этому преимуществу регулирования синхронные конденсаторы очень подходят для корректировки коэффициента мощности системы, но это оборудование довольно дорогое по сравнению со статическими конденсаторами. Вот почему синхронные конденсаторы оправдано использовать только для регулирования напряжения в системе передачи очень высокого напряжения. Это практически и экономически возможно только при использовании конденсаторов малой емкости с индивидуальной нагрузкой, а не при использовании синхронных конденсаторов.
Это практически и экономически возможно только при использовании конденсаторов малой емкости с индивидуальной нагрузкой, а не при использовании синхронных конденсаторов.

 После полного высыхания бумаги и удаления всех газов из изоляции емкость конденсатора заполняется пропиткой, дегазированной при том же вакууме.
После полного высыхания бумаги и удаления всех газов из изоляции емкость конденсатора заполняется пропиткой, дегазированной при том же вакууме. Для высоковольтных приложений несколько конденсаторных блоков подключаются последовательно и параллельно, чтобы сформировать конденсаторную батарею для требуемого напряжения и номинальных значений киловар. Например, когда конденсаторная батарея 5,1 мегавар должна быть введена в эксплуатацию в системе 11 кВ, каждая единица батареи сделана на номинальное напряжение 11 кВ. В этой установке требования к фазе Mega VAR составляют 5,1 / 3 = 1,7.
Для высоковольтных приложений несколько конденсаторных блоков подключаются последовательно и параллельно, чтобы сформировать конденсаторную батарею для требуемого напряжения и номинальных значений киловар. Например, когда конденсаторная батарея 5,1 мегавар должна быть введена в эксплуатацию в системе 11 кВ, каждая единица батареи сделана на номинальное напряжение 11 кВ. В этой установке требования к фазе Mega VAR составляют 5,1 / 3 = 1,7. Такие же конденсаторные блоки можно использовать и для систем на 132 кВ. Для этой серии и параллельных комбинаций основных конденсаторных блоков будут собраны в соответствии с требованиями мегавар.
Такие же конденсаторные блоки можно использовать и для систем на 132 кВ. Для этой серии и параллельных комбинаций основных конденсаторных блоков будут собраны в соответствии с требованиями мегавар. Методы компенсации последовательных и шунтирующих конденсаторов
Методы компенсации последовательных и шунтирующих конденсаторов
 Другими словами, реактивная мощность
Другими словами, реактивная мощность Компенсация шунта.
Компенсация шунта. Изучение поведения сети и изучение методов управления в новых сценариях, таких как производство возобновляемой энергии, необходимо для обновления сети, чтобы справиться с новыми проблемами, вызванными внедрением современных технологий, улучшающих наши энергосистемы.
Изучение поведения сети и изучение методов управления в новых сценариях, таких как производство возобновляемой энергии, необходимо для обновления сети, чтобы справиться с новыми проблемами, вызванными внедрением современных технологий, улучшающих наши энергосистемы. Используя простые в реализации шаги, он позволяет снизить потери и затраты, повышая эффективность сети. Обоснованность подхода проверяется на той же ранее исследованной сети, что подтверждает ее функционирование и эффективное сокращение потерь в цепях более чем на 5%.
Используя простые в реализации шаги, он позволяет снизить потери и затраты, повышая эффективность сети. Обоснованность подхода проверяется на той же ранее исследованной сети, что подтверждает ее функционирование и эффективное сокращение потерь в цепях более чем на 5%. Основная новизна заключается в том, что компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для реактивного тока, а также исследуется новая неизвестная оценка динамики системы (USDE) для решения проблемы неизвестной динамики системы. Фаза моделирования, основанная на базовой структуре однофазного STATCOM и принципе STATCOM, сначала выполняется для описания его поведения. Для решения проблемы неизвестной динамики и внешних возмущений затем разрабатывается новый USDE, так что неопределенности моделирования и внешние возмущения могут быть учтены без использования аппроксиматора функций, что устраняет требовательные вычислительные затраты и утомительную настройку параметров в других схемах управления.Наконец, на основе предложенного оценщика мы проектируем составное управление с пропорционально-интегральным (ПИ) контроллером обратной связи и предлагаемым оценщиком для достижения точного отслеживания тока. Также дан анализ сходимости как ошибки оценки, так и ошибки управления.
Основная новизна заключается в том, что компенсация реактивной мощности STATCOM переформулирована как эквивалентное отслеживающее управление для реактивного тока, а также исследуется новая неизвестная оценка динамики системы (USDE) для решения проблемы неизвестной динамики системы. Фаза моделирования, основанная на базовой структуре однофазного STATCOM и принципе STATCOM, сначала выполняется для описания его поведения. Для решения проблемы неизвестной динамики и внешних возмущений затем разрабатывается новый USDE, так что неопределенности моделирования и внешние возмущения могут быть учтены без использования аппроксиматора функций, что устраняет требовательные вычислительные затраты и утомительную настройку параметров в других схемах управления.Наконец, на основе предложенного оценщика мы проектируем составное управление с пропорционально-интегральным (ПИ) контроллером обратной связи и предлагаемым оценщиком для достижения точного отслеживания тока. Также дан анализ сходимости как ошибки оценки, так и ошибки управления. Результаты моделирования с использованием реалистичного симулятора представлены, чтобы показать эффективность предложенной стратегии.
Результаты моделирования с использованием реалистичного симулятора представлены, чтобы показать эффективность предложенной стратегии. По сравнению с традиционными компенсирующими устройствами, STATCOM обладает преимуществами широкого рабочего диапазона, быстрой скорости отклика, небольшой емкости элементов накопления энергии и гибкости управления, а также может компенсировать реактивную мощность в двух направлениях [6]. Таким образом, это стало современной технологией компенсации реактивной мощности, которая вызывает большой интерес исследователей.СТАТКОМ обычно подключается параллельно с энергосистемой 10 кВ, поэтому многоуровневая технология становится ключевой схемой этих типов устройств, применяемых в высоковольтной энергосистеме [7]. В многоуровневой технологии [8] цепная топология стала основной структурой из-за ее высокой степени модульности, высокой эквивалентной частоты переключения, работы с резервированием и других преимуществ [9–13]. Баланс напряжения на стороне постоянного тока (DC) является предпосылкой безопасной и надежной работы цепи STATCOM.В противном случае перенапряжение шины постоянного тока, вызванное дисбалансом, приведет к повреждению конденсатора, возгоранию биполярного транзистора с изолированным затвором и другим серьезным неисправностям, которые приведут к отключению устройства и серьезно повлияют на безопасность и стабильность работы устройства.
По сравнению с традиционными компенсирующими устройствами, STATCOM обладает преимуществами широкого рабочего диапазона, быстрой скорости отклика, небольшой емкости элементов накопления энергии и гибкости управления, а также может компенсировать реактивную мощность в двух направлениях [6]. Таким образом, это стало современной технологией компенсации реактивной мощности, которая вызывает большой интерес исследователей.СТАТКОМ обычно подключается параллельно с энергосистемой 10 кВ, поэтому многоуровневая технология становится ключевой схемой этих типов устройств, применяемых в высоковольтной энергосистеме [7]. В многоуровневой технологии [8] цепная топология стала основной структурой из-за ее высокой степени модульности, высокой эквивалентной частоты переключения, работы с резервированием и других преимуществ [9–13]. Баланс напряжения на стороне постоянного тока (DC) является предпосылкой безопасной и надежной работы цепи STATCOM.В противном случае перенапряжение шины постоянного тока, вызванное дисбалансом, приведет к повреждению конденсатора, возгоранию биполярного транзистора с изолированным затвором и другим серьезным неисправностям, которые приведут к отключению устройства и серьезно повлияют на безопасность и стабильность работы устройства. параллельная сетка. Поэтому многие исследователи [14–17] предложили стратегии управления балансом напряжения на стороне постоянного тока для STATCOM с цепной структурой, инвертором, подключенным к фотоэлектрической сети, силовым электронным трансформатором и другими устройствами.
параллельная сетка. Поэтому многие исследователи [14–17] предложили стратегии управления балансом напряжения на стороне постоянного тока для STATCOM с цепной структурой, инвертором, подключенным к фотоэлектрической сети, силовым электронным трансформатором и другими устройствами. В литературе требования к динамике системы могут быть ослаблены с точки зрения некоторых методов оценки и подавления помех, например.например, наблюдатели с высоким коэффициентом усиления [27, 28] и наблюдатели скользящего режима [29, 30]. Другим эффективным методом работы с неизвестной динамикой системы является наблюдатель возмущений (DOB), о котором первоначально сообщалось в [31]. Однако ранее разработанный DOB в основном подходит только для линейных систем. В последующих исследованиях были разработаны различные усовершенствованные ДОБ, такие как наблюдатель нелинейных возмущений (NDO) [32], наблюдатель расширенного состояния (ESO) [33] и наблюдатель неизвестного входа (UIO) [34]. Однако вышеупомянутые наблюдатели требуют разработки наблюдателя и требуют настройки множества параметров, что может оказаться непростой задачей для практиков.В этом отношении стоит продолжить изучение нового блока оценки с меньшим количеством параметров настройки и гарантированной сходимостью для решения неизвестных системных нелинейностей для систем управления STATCOM.
В литературе требования к динамике системы могут быть ослаблены с точки зрения некоторых методов оценки и подавления помех, например.например, наблюдатели с высоким коэффициентом усиления [27, 28] и наблюдатели скользящего режима [29, 30]. Другим эффективным методом работы с неизвестной динамикой системы является наблюдатель возмущений (DOB), о котором первоначально сообщалось в [31]. Однако ранее разработанный DOB в основном подходит только для линейных систем. В последующих исследованиях были разработаны различные усовершенствованные ДОБ, такие как наблюдатель нелинейных возмущений (NDO) [32], наблюдатель расширенного состояния (ESO) [33] и наблюдатель неизвестного входа (UIO) [34]. Однако вышеупомянутые наблюдатели требуют разработки наблюдателя и требуют настройки множества параметров, что может оказаться непростой задачей для практиков.В этом отношении стоит продолжить изучение нового блока оценки с меньшим количеством параметров настройки и гарантированной сходимостью для решения неизвестных системных нелинейностей для систем управления STATCOM.

 Результаты моделирования приведены в разделе 4, а некоторые выводы сделаны в разделе 5.
Результаты моделирования приведены в разделе 4, а некоторые выводы сделаны в разделе 5. Основное назначение VSC — создание переменного напряжения из постоянного.Поэтому его обычно называют преобразователем постоянного тока в переменный.
Основное назначение VSC — создание переменного напряжения из постоянного.Поэтому его обычно называют преобразователем постоянного тока в переменный.
 Используя сумму трехфазного тока как 0, мы можем получить ток нагрузки b-фазы как
Используя сумму трехфазного тока как 0, мы можем получить ток нагрузки b-фазы как