Конструкция асинхронного двигателя — Всё о электрике
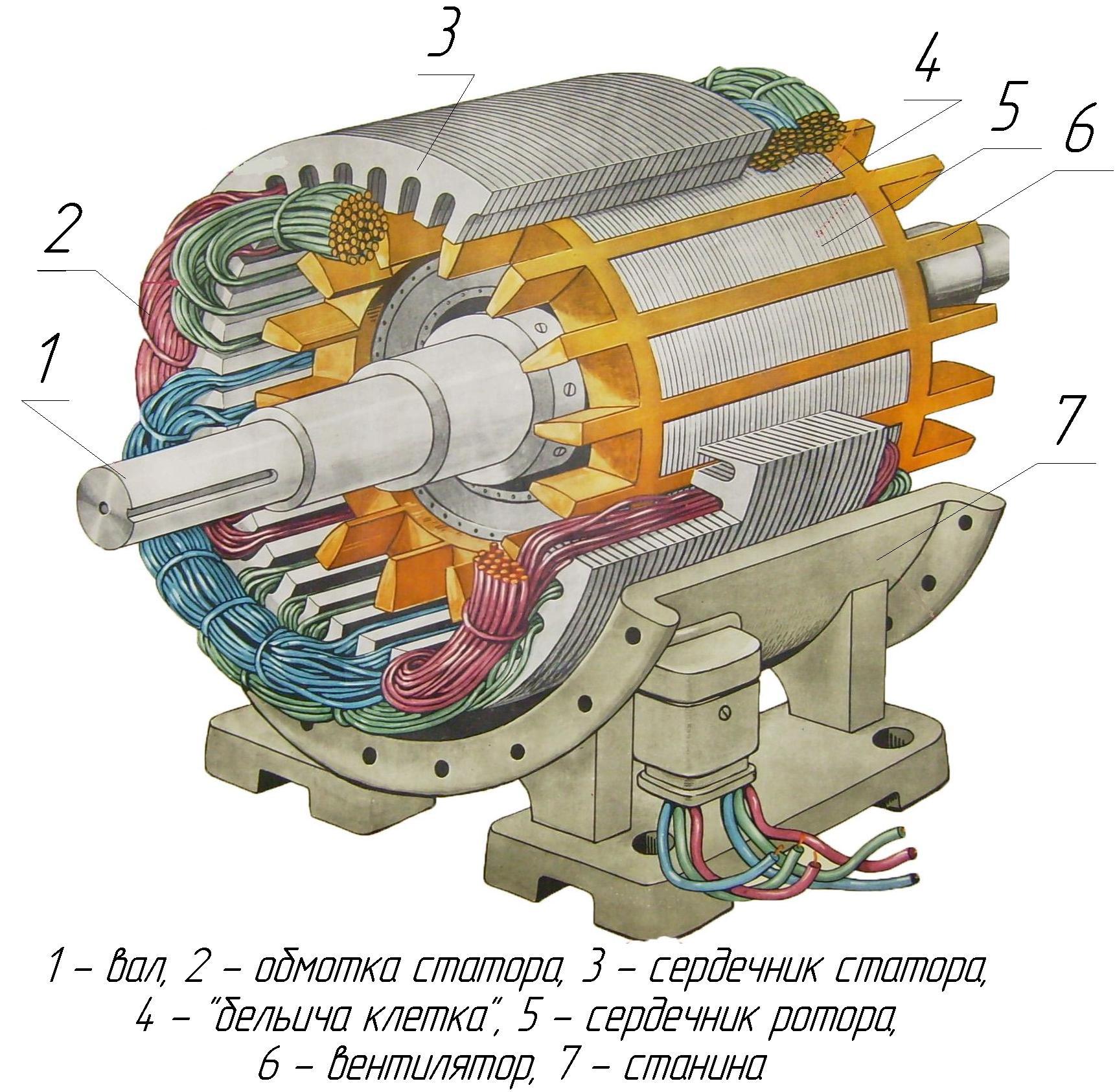
5.2. Устройство асинхронного двигателя
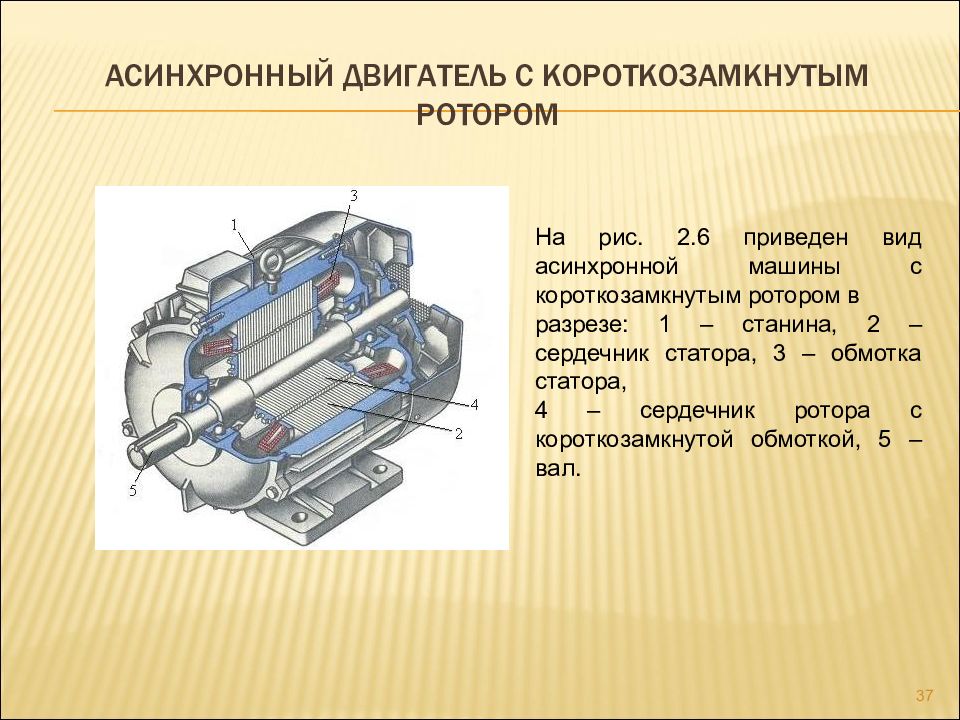
Асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.5.2). Двигатели этого вида имеют наиболее широкое применение.
Рис.5.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов;
5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкну-
той обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
Неподвижная часть двигателя — статор — состоит из корпуса // и сердечника 10 с трехфазной обмоткой. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция Сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Рис.5.3. Конструкция короткозамкнутого ротора: а — беличья клетка; б — ротор с медной стержневой обмоткой; в — ротор с алюминиевой литой обмоткой;
1 — сердечник ротора; 2 — стержни; 3 — замыкающие кольца;
4 — лопасти вентилятора
Обмотка статора асинхронного электродвигателя может быть соединена звездой или треугольником. Схемы соединения представлены на рис.5.4
Рис.5.4. Схемы соединения выводов трехфазных обмоток электродвигателя:
а — звезда; б — треугольник
5.3. Принцип образования вращающегося магнитного поля
 5.5, б.
5.5, б.В момент времени tток в фазе А равен 0, в фазе В ток имеет отрицательное, а в фазе С — положительное направления. Эти направления тока отмечаем на рис.5.5, б в сечениях обмоток статора для данного момента времени. При этом следует помнить, что за положительное направление тока
Рис.5.5. Получение вращающегося магнитного поля: а — трехфазная обмотка статора;
б — вращение МДС; в — модель магнитного поля статора;
1-4 — обмотка фазы А; 3-6 — обмотка фазы В;
5—2 — обмотка фазы С (первая цифра — начало обмотки)
в фазной обмотке принимается направление тока от начала обмотки к ее концу и обозначается х, а, следовательно, отрицательное направление тока в обмотке соответствует направлению тока от конца к началу и обозначается •. Затем в соответствии с указанными на рис. 5, б направлениями токов определяем (по правилу буравчика) направление вектора МДС трехфазной обмотки статора (вектор Fmнаправлен вниз).
В момент времени t1т.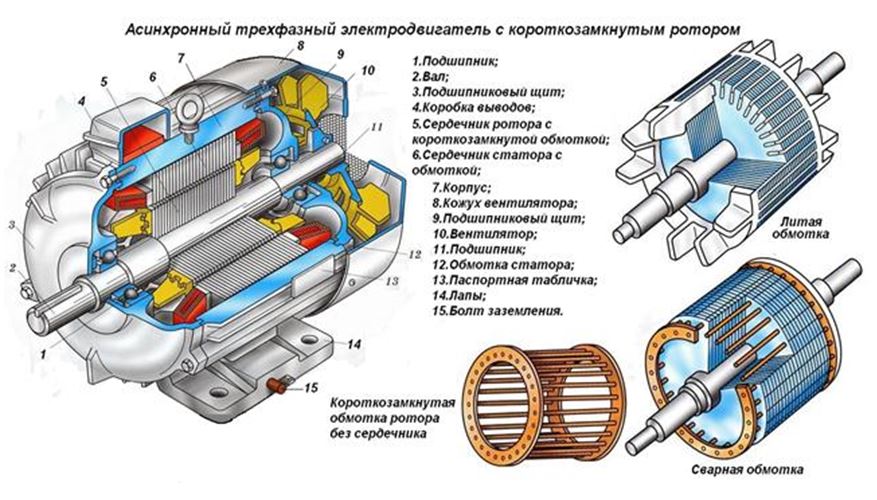 е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t, заметим, что вектор МДС обмотки статора F
е. через (1/3) Т, ток в фазе В равен нулю, в фазе А имеет положительное, а в фазе С — отрицательное направление. Сделав построения, аналогичные моменту времени t, заметим, что вектор МДС обмотки статора F
Проведя аналогичные построения вектора МДС обмотки статора для момента t2и t3, видим, что каждый раз при переходе от одного момента времени к другому вектор Fmповорачивается на 120°, а за один период изменения токов в обмотках (с tдо t3) делает полный оборот (360°) и будет, таким образом, вращающимся. Вращающаяся МДС создает вращающееся магнитное поле, эквивалентное полю магнита N — S с индукцией Во (рис.5, в). Это поле вращается с синхронной частотойnкоторая пропорциональна частоте переменного токаfи обратно пропорциональна числу пар полюсов обмоток статора р, т.е.
,
Зависимость n от р и f представлена в табл. 5.2.
5.2.
Общие сведения, конструкция асинхронного двигателя
Основными частями любого электродвигателя переменного тока являются: неподвижная часть, называемая статором, вращающаяся часть, называемая ротором. Статор и ротор разделены воздушным зазором, величина которого колеблется от 0,1 мм до 1,5 мм в зависимости о т мощности двигателя. В статоре расположены обмотки, к которым подводится электрическая энергия переменного тока от внешнего источника. Обмотки создают в статоре магнитное поле вращающееся с частотой кратной частоте источника. Магнитное поле статора заставляет вращаться ротор двигателя. Если частота вращения ротора в установившемся номинальном режиме точно равна частоте вращения магнитного поля статора, то двигатель называется синхронным, в противном случае – асинхронным.
Асинхронные электродвигатели в настоящее время являются самыми распространенными в мире электродвигателями. На их долю приходится не менее 80% из общего числа выпускаемых промышленность электродвигателей.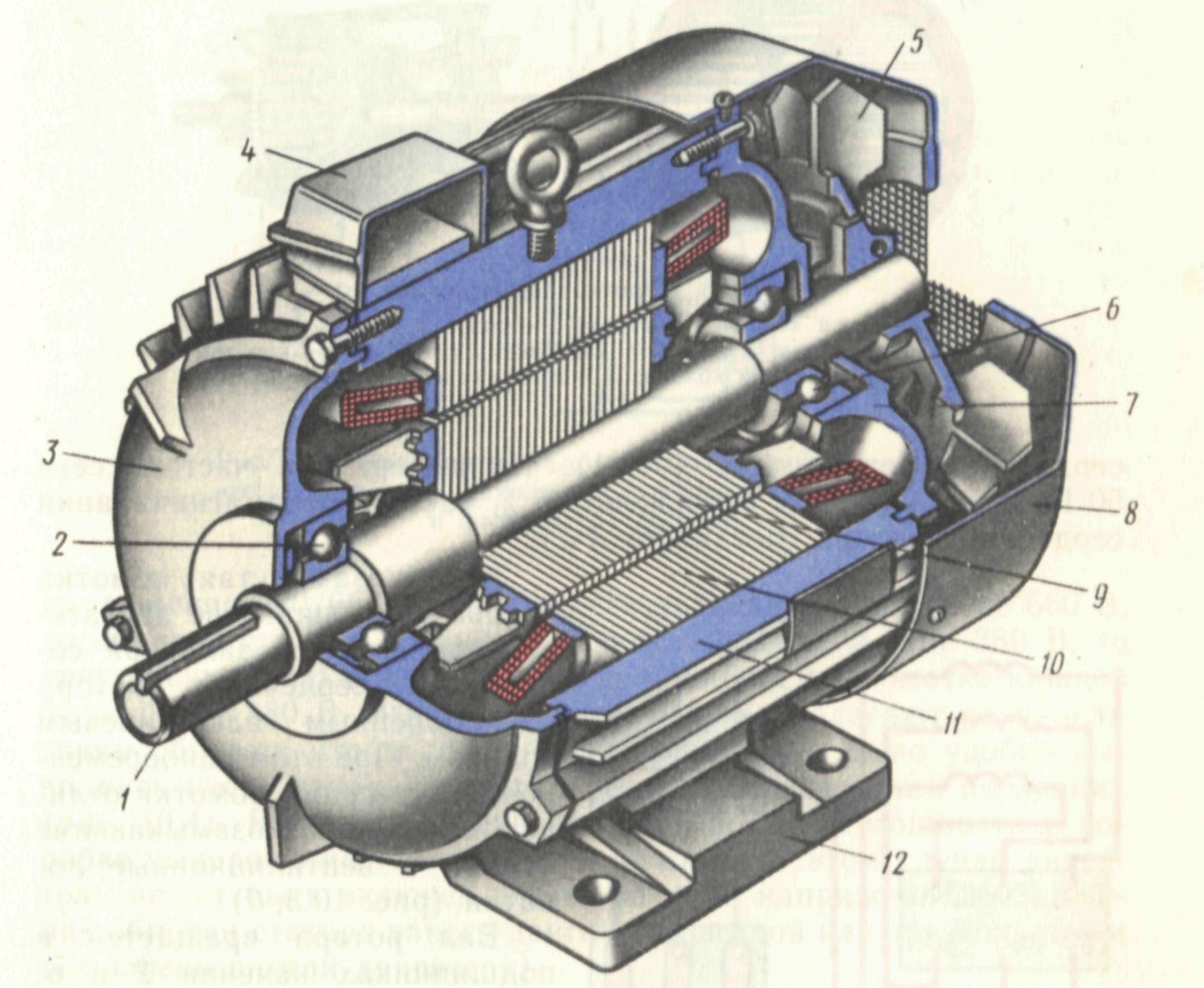
Существуют две схемы исполнения асинхронных двигателе: прямая и обратная. В двигателях, выполненных по прямой схеме (рис. 3.1), ротор 1 жестко связан с валом двигателя и вращается вместе с ним. Статор 2 кольцом охватывает ротор и закрепляется на корпусе двигателя 3, который имеет вид трубы, выполненной из алюминия или стали. В двигателях, выполненных по обратной схеме (рис. 3.2) статор 2 жестко закрепляется на неподвижном валу двигателя, а ротор 1 вращается относительно вала на подшипниках и кольцом охватывает статор. Двигатели обратной схемы используются сравнительно редко, в основном, в качестве гиромоторов [], поэтому далее будем рассматривать только двигатели прямого исполнения.
Рис. 3.1. Конструкция трехфазного асинхронного двигателя серии АОЛ
Рис. 3.2. Конструкция гиромотора
а – закрытый несимметричный гиромотор, б – закрытый симметричный гиромотор, в – открытый симметричный гиромотор
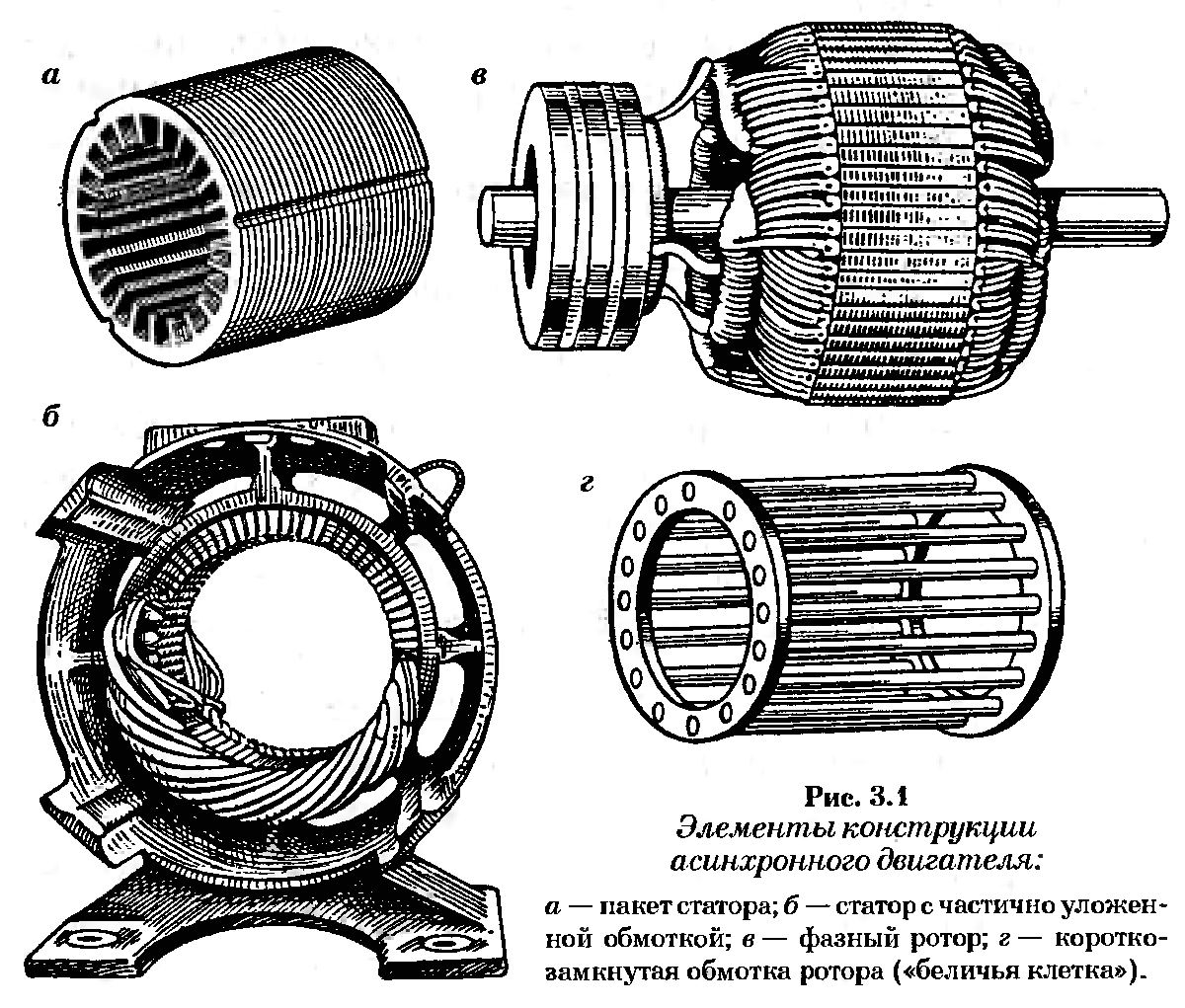
Для уменьшения потерь на вихревые токи сердечник статора набирают из штампованных листов электротехнической стали толщиной 0,35÷0,5 мм. Листы штампуются в виде колец 1 (рис. 3.3). На внутренней стороне колец 2 имеются углубления – пазы, в которые укладываются провода обмотки статора. Листы перед сборкой изолируют, покрывая слоем лака.
Листы штампуются в виде колец 1 (рис. 3.3). На внутренней стороне колец 2 имеются углубления – пазы, в которые укладываются провода обмотки статора. Листы перед сборкой изолируют, покрывая слоем лака.
Рис. 3.3. Листы стали статора и ротора
Пазы статора могут быть полузакрытыми или полуоткрытыми. В машинах переменного тока малой и средней мощности применяют полузакрытые пазы (рис. 3.4). Каждый паз изолируют 1, а затем заполняют проводниками обмотки 2. Обмотку статора закрепляют в пазах с помощью деревянных или пластиковых клиньев 3. В трехфазныз двигателях обмотка трехфазная; фазы сдвинуты в пространстве относительно друг друга на 120 эл. град.
Рис. 3.4. Полузакрытый паз статора
Концы фаз выводят на зажимы коробки выводов. Трехфазную обмотку статора можно собирать в треугольник или звезду в зависимости от напряжения сети.
Ротор 1 (рис. 3.1) асинхронного двигателя обычно представляет собой набранный из штампованных листов электротехнической стали сердечник с пазами, насаженный на вал.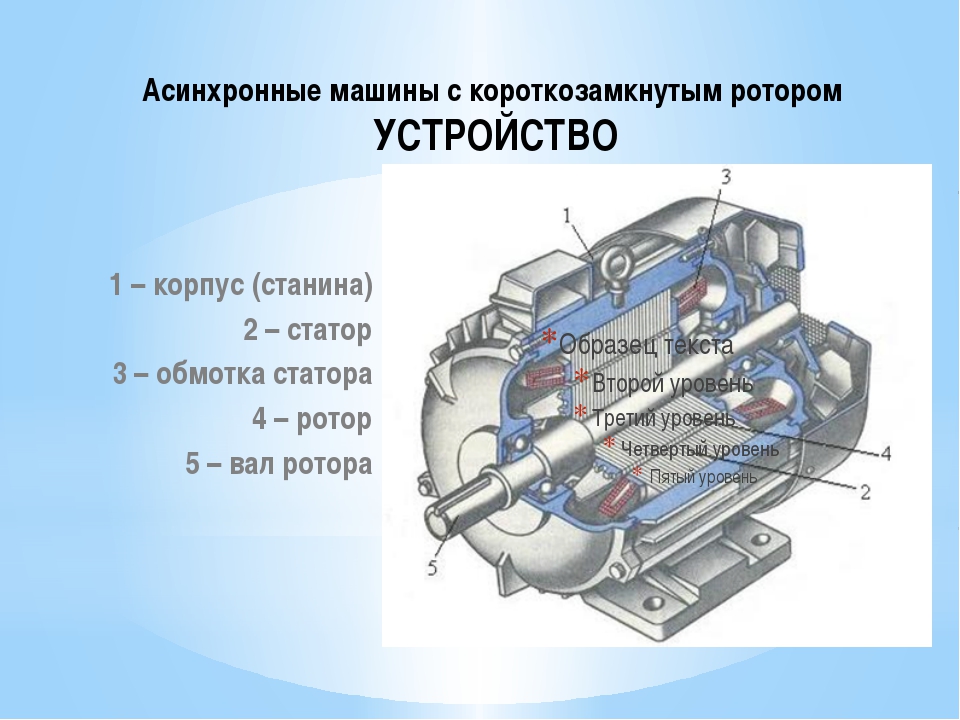 Сердечник ротора имеет форму цилиндра, на поверхности которого имеются пазы для обмотки. Листы сердечника ротора 2 (рис. 3.3) специально не изолируют, так как в большинстве случаев вполне достаточной изоляцией оказывается пленка окалины, имеющаяся на поверхности листов.
Сердечник ротора имеет форму цилиндра, на поверхности которого имеются пазы для обмотки. Листы сердечника ротора 2 (рис. 3.3) специально не изолируют, так как в большинстве случаев вполне достаточной изоляцией оказывается пленка окалины, имеющаяся на поверхности листов.
В зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные.
В машинах малой и средней мощности чаще всего применяются короткозамкнутые роторы. В пазах таких роторов располагаются медные или алюминиевые стержни, соединяющиеся с торцов короткозамыкающими кольцами. Таким образом, обмотка короткозамкнутого ротора имеет вид беличьей клетки (рис. 3.5, а). Чаще всего корткозамкнутая обмотка получается в результате заливки пакета стали алюминием. В этом случае короткозамыкающие кольца снабжают выступами – вентиляционными лопастями, которые при вращении ротора перемешивают воздух и способствуют лучшему охлаждению машины (рис. 3.5, б).
Рис. 3.5. Короткозамкнутая клетка и ротор с обмоткой из алюминия
В асинхронных машинах большой мощности и в некоторых специальных машинах малой мощности для получения большого пускового момента и широкого диапазона регулирования частоты вращения применяются фазные роторы. В пазах такого ротора укладывают не стержни, а изолированные проводники катушек (секций) трехфазной обмотки, выполненной аналогично обмотки статора и соединенной в звезду. Концы фаз обмотки ротора присоединяют к изолированным друг от друга и вала двигателя контактным кольцам, по которым при вращении ротора скользят укрепленные в щеткодержателях щетки. С помощью контактных колец и щеток обмотка ротора соединяется с пусковыми (ПР) или регулировочными реостатами (рис. 3.6).
В пазах такого ротора укладывают не стержни, а изолированные проводники катушек (секций) трехфазной обмотки, выполненной аналогично обмотки статора и соединенной в звезду. Концы фаз обмотки ротора присоединяют к изолированным друг от друга и вала двигателя контактным кольцам, по которым при вращении ротора скользят укрепленные в щеткодержателях щетки. С помощью контактных колец и щеток обмотка ротора соединяется с пусковыми (ПР) или регулировочными реостатами (рис. 3.6).
Вал двигателя вращается в подшипниках, укрепленных в подшипниковых щитах – крышках (рис. 3.1), которые выполнены из того же материала, что и корпус машины.
Рис. 3.6. Принципиальные схемы асинхронных двигателей
Не нашли то, что искали? Воспользуйтесь поиском:
Устройство, виды и принцип действия асинхронных электродвигателей
Наука в области электричества в XIX и XX веках стремительно развивалась, что привело к созданию электрических асинхронных двигателей. С помощью таких устройств развитие промышленной индустрии шагнуло далеко вперед и теперь невозможно представить заводы и фабрики без силовых машин с использованием асинхронных электродвигателей.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
Устройство и принцип действия асинхронного двигателя
Главными компонентами асинхронного электродвигателя являются статор и ротор, которые отделены друг от друга воздушным зазором. Активную работу в двигателе выполняют обмотки и сердечник ротора.
Активную работу в двигателе выполняют обмотки и сердечник ротора.
Под асинхронностью двигателя понимают отличие частоты вращения ротора от частоты вращения электромагнитного поля.
Статор – это неподвижная часть двигателя, сердечник которой выполняется из электротехнической стали и монтируется в станину. Станина выполняется литым способом из материала, который не магнитится (чугун, алюминий). Обмотки статора являются трехфазной системой, в которой провода уложены в пазы с углом отклонения 120 градусов. Фазы обмоток стандартно подключают к сети по схемам «звезда» или «треугольник».
Ротор – это подвижная часть двигателя. Роторы асинхронных электродвигателей бывают двух видов: с короткозамкнутым и фазным роторами. Данные виды отличаются между собой конструкциями обмотки ротора.
Асинхронный двигатель с короткозамкнутым ротором
Такой тип электрической машины был впервые запатентован М.О. Доливо-Добровольским и в народе называется «беличье колесо» из-за внешнего вида конструкции. Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Короткозамкнутая обмотка ротора состоит из накоротко замкнутых с помощью колец стержней из меди (алюминия, латуни) и вставленные в пазы обмотки сердечника ротора. Такой тип ротора не имеет подвижных контактов, поэтому такие двигатели очень надежны и долговечны при эксплуатации.
Асинхронный двигатель с фазным ротором
Такое устройство позволяет регулировать скорость работы в широком диапазоне. Фазный ротор представляет собой трехфазную обмотку, которая соединяется по схемам «звезда» или треугольник. В таких электродвигателях в конструкции имеются специальные щетки, с помощью которых можно регулировать скорость движения ротора. Если в механизм такого двигателя добавить специальный реостат, то при пуске двигателя уменьшится активное сопротивление и тем самым уменьшатся пусковые токи, которые пагубно влияют на электрическую сеть и само устройство.
Принцип действия
При подаче электрического тока на обмотки статора возникает магнитный поток. Так как фазы смещены относительно друг друга на 120 градусов, то из-за этого поток в обмотках вращается. Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Если ротор короткозамкнутый, то при таком вращении в роторе появляется ток, который создает электромагнитное поле. Взаимодействуя друг с другом, магнитные поля ротора и статора заставляют ротор электродвигателя вращаться. В случае, если ротор фазный, то напряжение подается на статор и ротор одновременно, в каждом механизме появляется магнитное поле, они взаимодействуют друг с другом и вращают ротор.
Достоинства асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Простое устройство и схема запуска | 1. Небольшой пусковой ток |
| 2. Низкая цена изготовления | 2. Возможность регулировать скорость вращения |
| 3. С увеличением нагрузки скорость вала не меняется | 3. Работа с небольшими перегрузками без изменения частоты вращения |
| 4. Способен переносить перегрузки краткие по времени | 4. Можно применять автоматический пуск |
5. Надежен и долговечен в эксплуатации Надежен и долговечен в эксплуатации | 5. Имеет большой вращающий момент |
| 6. Подходит для любых условий работы | |
| 7. Имеет высокий коэффициент полезного действия |
Недостатки асинхронных электродвигателей
| С короткозамкнутым ротором | С фазным ротором |
|---|---|
| 1. Не регулируется скорость вращения ротора | 1. Большие габариты |
| 2. Маленький пусковой момент | 2. Коэффициент полезного действия ниже |
| 3. Высокий пусковой ток | 3. Частое обслуживание из-за износа щеток |
| 4. Некоторая сложность конструкции и наличие движущихся контактов |
Асинхронные электродвигатели являются очень эффективными устройствами с отличными механическими характеристиками, и благодаря этому они являются лидерами по частоте применения.
Режимы работы
Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.

Продолжительный режим – основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
Регулирование частоты вращения асинхронных двигателей
Для регулирования частоты вращения асинхронных электродвигателей и управления режимами их работы существуют следующие способы:
- Частотный – при изменении частоты тока в электрической сети изменяется частота вращения электрического двигателя. Для такого способа применяют устройство, которое называется частотный преобразователь;
- Реостатный – при изменении сопротивления реостата в роторе, изменяется частота вращения. Такой способ увеличивает пусковой момент и критическое скольжение;
- Импульсный – способ управления, при котором на двигатель подается напряжение специального вида.

- Переключение обмоток по время работы электрического двигателя со схемы «звезда» на схему «треугольник», что снижает пусковые токи;
- Управление с изменения пар полюсов для короткозамкнутых роторов;
- Подключение индуктивного сопротивления для двигателей с фазным ротором.
С развитием электронных систем, управление различными электродвигателями асинхронного типа становится все более эффективным и точным. Такие двигатели используются в мире повсеместно, разнообразие задач, выполняемых такими механизмами, с каждым днем растет, и потребность в них не уменьшается.
{SOURCE}
Трехфазный асинхронный двигатель с короткозамкнутым ротором
- Главная
- Cостав
- Жд путь
- Механизмы
- СЦБ
- Электро
- Статьи
- Новости
- Инфо
- Back
- Организации
Устройство и принцип работы трехфазных асинхронных двигателей | RuAut
Устройство трехфазных асинхронных двигателей (статор и ротор асинхронных двигателей)Трехфазный асинхронный двигатель состоит из неподвижного статора и ротора. Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Три обмотки размещены в пазах на внутренней стороне сердечника статора асинхронного двигателя. Обмотка же ротора асинхронного двигателя не имеет электрического соединения с сетью и с обмоткой статора. Начало и концы фаз обмоток статора присоединяют к зажимам в коробке выводов по схеме звезда или треугольник.
Асинхронные двигатели в основном различаются устройством ротора, который бывает двух типов: фазный или короткозамкнутый. Обмотка короткозамкнутого ротора асинхронного двигателя выполняется на цилиндре из медных стержней и называется «беличьей клеткой». Торцевые концы стержней замыкают металлическими кольцами. Пакет ротора набирают из электротехнической стали. В двигателях меньшей мощности стержни заливают алюминием. Фазный ротор и статор имеют трехфазную обмотку. Фазы обмотки соединяют звездой или треугольником и ее свободные концы выводят на изолированные контактные кольца.
Получение вращающегося магнитного поляОбмотка статора асинхронного двигателя в виде трех катушек уложена в пазы расположенные под углом в 120 градусов. Начало и конца катушек обозначаются соответственно буквами A, B, C и X,Y,Z. При подаче на катушки трехфазного напряжения в них установятся токи Ia, Ib, Ic и катушки создадут собственное переменное магнитное поле. Ток в любой катушке положительный, когда он направлен от начала к ее концу и отрицательный при обратном направлении. Векторы намагничивающей силы совпадают с осями катушек, а их величина определяется значениями токов, направление результирующего вектора совпадает с осью катушки. Вектор результирующей намагничивающей силы поворачивается на 120 градусов сохраняя величину совпадает с осью соответствующей катушки. Таким образом за период, результирующее магнитное поле статора совершает оборот с неизменной скоростью. Работа трехфазного асинхронного двигателя основана на взаимодействии вращающегося магнитного поля с токами наводимыми в проводниках ротора.
Совокупность моментов созданных отдельными проводниками образует результирующий вращающий момент двигателя, возникает электромагнитная пара сил, которая стремится повернуть ротор в направлении движения электромагнитного поля статора. Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
Ротор приходит во вращение приобретает определенную скорость, магнитное поле и ротор вращаются с разными скоростями или асинхронно. Применительно к асинхронным двигателям, скорость вращения ротора всегда меньше скорости вращения магнитного поля статора.
В асинхронных двигателях с большим моментом инерции необходимо увеличение вращающего момента с одновременным ограничением пусковых токов — для этих целей применяют двигатели с фазным ротором. Для увеличения начального пускового момента в схему ротора включают трехфазный реостат. В начале пуска он введен полностью, пусковой ток при этом уменьшается. При работе реостат полностью выведен. Для пуска асинхронных двигателей с короткозамкнутым ротором применяют три схемы: с реактивной катушкой, с автотрансформатором и с переключением со звезды на треугольник. Рубильник последовательно соединяет реактивную катушку и статор двигателя. Когда скорость ротора приблизится к номинальной, замыкается рубильник, он закорачивает катушка и статор переключаются на полное напряжение сети. При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
При автотрансформаторном пуске по мере разгона двигателя, автотрансформатор переводится в рабочее положение, в котором на статор подается полное напряжение сети. Пуск асинхронного двигателя с предварительным включением обмотки статора звездой и последующим переключением ее на треугольник дает трехкратное уменьшение тока.
Параллельные обмотки двух фаз образуют одну пару полюсов сдвинутые в пространстве на 120 градусов. Последовательное соединение обмоток образует две пары полюсов, что дает возможность уменьшить скорость вращения в два раза. Для регулирования скорости вращения ротора изменением частоты тока используют отдельный источник тока или преобразователь энергии с регулируемой частотой выполненный на тиристорах.
Способы торможения двигателейПри торможении противовключением меняются два провода соединяющих трехфазную сеть с обмотками статора, изменяя при этом направление движения магнитного поля машины.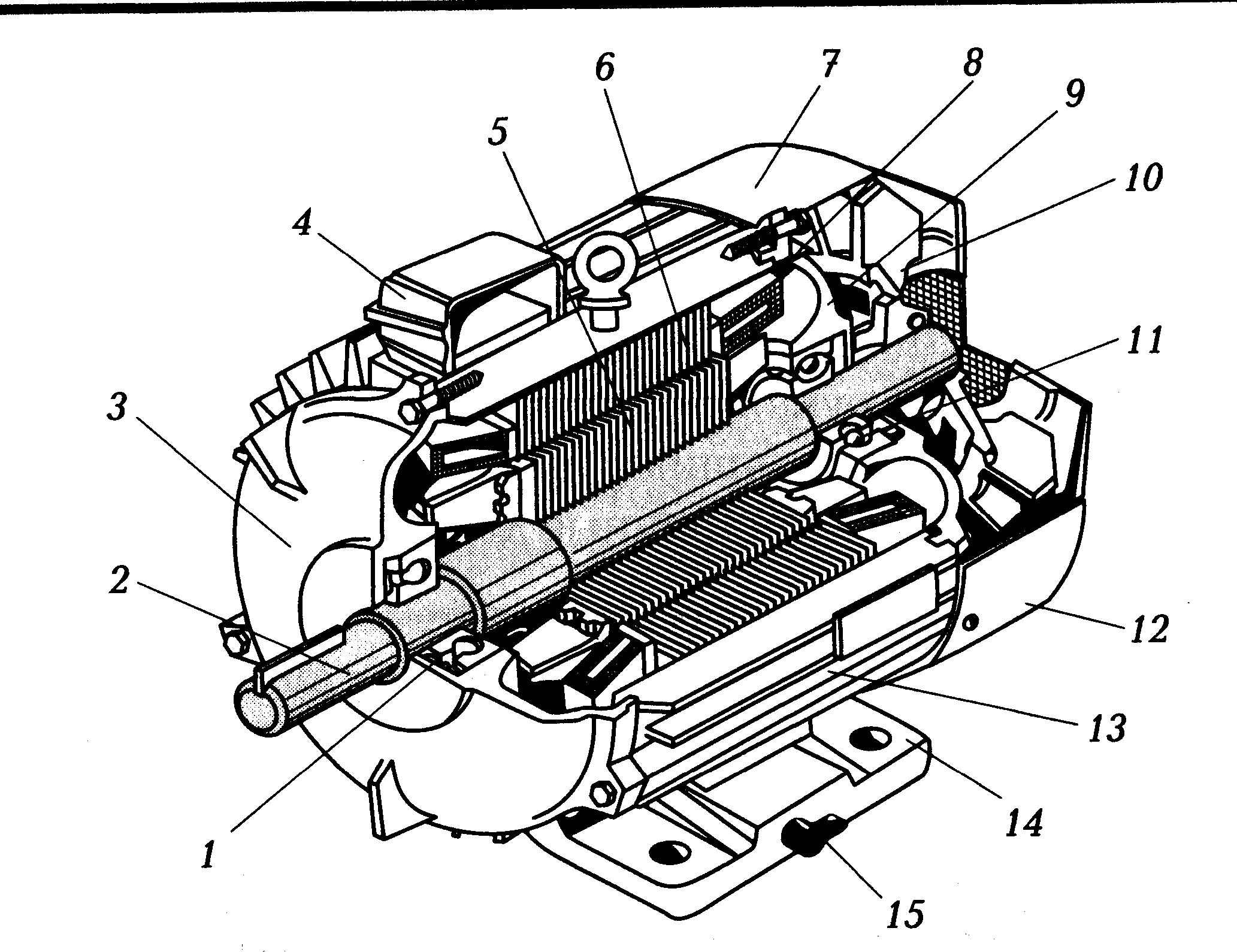 При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
При этом наступает режим электромагнитного тормоза. Для динамического торможения обмотка статора отключается от трехфазной сети и включается в сеть постоянного тока. Неподвижное поле статора заставляет ротор быстро останавливаться. Асинхронные двигатели нашли широкое применение в промышленности. В строительных механизмах, на металлообрабатывающих станках, в кузнечно-прессовом оборудовании, в силовых приводах прокатных станов, в радиолокационных станциях и многих других отраслях.
Устройство асинхронных двигателей
Как уже отмечалось (см. § 6.2), асинхронный двигатель состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели сфазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором(рис. 10.2). Двигатели этого вида имеют наиболее широкое применение.
Неподвижная часть двигателя — статор — состоит из корпуса 11 и сердечника 10с трехфазной обмоткой (см. гл. 8). Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 10, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней
Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней
поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора (см. рис. 8.1), соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
Рис. 10.2. Устройство трехфазного асинхронного двигателя
с короткозамкнутым ротором:
1 — вал; 2, 6 — подшипники; 3, 7 — подшипниковые щиты; 4 — коробка выводов; 5 — вентилятор; 8 — кожух вентилятора; 9 — сердечник ротора с короткозамкнутой обмоткой; 10 — сердечник статора с обмоткой; 11 — корпус; 12 — лапы
В расточке статора расположена вращающаяся часть двигателя ротор, состоящий из вала 1 и сердечника 9 с короткозамкнутой обмоткой.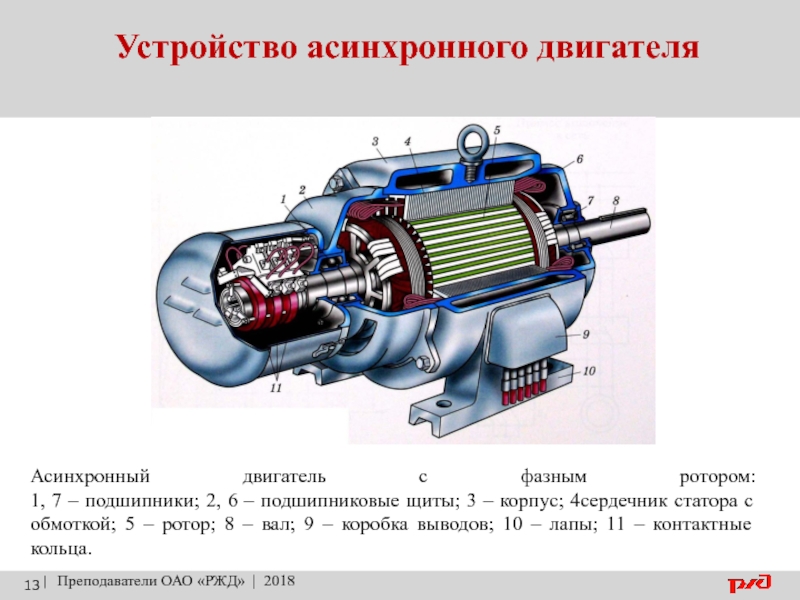 Такая обмотка, называемая «беличье колесо», представляет собой ряд металлических (алюминиевых или медных стержней, расположенных в пазах сердечника ротора, замкнутых с двух сторон короткозамыкающими кольцами (рис. 10.3, а). Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла. Это является достаточной изоляцией, ограничивающей вихревые токи, так ка
Такая обмотка, называемая «беличье колесо», представляет собой ряд металлических (алюминиевых или медных стержней, расположенных в пазах сердечника ротора, замкнутых с двух сторон короткозамыкающими кольцами (рис. 10.3, а). Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла. Это является достаточной изоляцией, ограничивающей вихревые токи, так ка
Трехфазный асинхронный двигатель с короткозамкнутым ротором
ЗАДАЧИ
• описание конструкции трехфазного двигателя с короткозамкнутым ротором, перечисление основные компоненты этого типа мотора.
• определите следующие элементы и объясните их важность для работы
трехфазного асинхронного двигателя с короткозамкнутым ротором: поле вращающегося статора,
синхронная скорость, индуцированные напряжения ротора, регулирование скорости, скольжение в процентах,
крутящий момент, пусковой ток, коэффициент мощности без нагрузки, коэффициент мощности при полной нагрузке,
обратное вращение и контроль скорости.
• рассчитать скорость двигателя и процент скольжения.
• реверсирование двигателя с короткозамкнутым ротором.
• опишите, почему двигатель потребляет больше тока при нагрузке.
• нарисуйте схемы, показывающие соединения с двойным напряжением для 230/460 вольт моторный режим.
• объясните информацию на паспортной табличке двигателя.
РАБОЧИЕ ХАРАКТЕРИСТИКИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором относительно мал в физический размер для данного рейтинга мощности по сравнению с другими типами моторов.Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошую регулировку скорости. при различных условиях нагрузки. Благодаря прочной конструкции и надежности работы, трехфазный асинхронный двигатель с короткозамкнутым ротором широко используется для многих промышленных приложений (рис. 1).
КОНСТРУКТИВНЫЕ ДЕТАЛИ
Трехфазный асинхронный двигатель с короткозамкнутым ротором обычно состоит из
статор, ротор и два торцевых щита, в которых размещены подшипники, поддерживающие
вал ротора.
Для этого типа двигателя требуется минимум обслуживания, поскольку
• обмотки ротора закорочены, образуя беличью клетку.
• нет коммутатора или контактных колец для обслуживания (по сравнению с DC мотор).
• нет щеток для замены.
Корпус двигателя обычно изготавливается из литой стали. Сердечник статора запрессован прямо в кадр. Два торцевых щита, в которых размещены подшипники, закреплены болтами. к стальной литой раме.Подшипники, поддерживающие вал ротора, подшипники скольжения или шарикоподшипники. Ill 2 — это вид в разрезе собранного мотора. На рисунке 3 показаны основные части трехфазного, асинхронный двигатель с короткозамкнутым ротором.
ил. 1 Трехфазные двигатели, используемые для насосов
ил. 2 Внешний вид конструкции и особенности типового трехфазного
взрывозащищенный двигатель: ПОЛЕВЫЕ ОБМОТКИ СТАТОРА; СМАЗОЧНАЯ ПРОБКА; ПОДЪЕМНЫЙ ГЛАЗ
ил. 3 Основные компоненты асинхронного двигателя с короткозамкнутым ротором: —РОТОР С
ХОЛОДИЛЬНИКИ; КОРОБКА ПРОВОДОВ
3 Основные компоненты асинхронного двигателя с короткозамкнутым ротором: —РОТОР С
ХОЛОДИЛЬНИКИ; КОРОБКА ПРОВОДОВ
ил. 4 Частично намотанный статор трехфазного двигателя
Статор
Типичный статор содержит трехфазную обмотку, установленную в пазах ламинированный стальной сердечник (илл. 4). Сама обмотка состоит из формованных катушки провода соединены таким образом, что есть три однофазные обмотки, разнесенные 120 электрических градусов друг от друга.Три отдельные однофазные обмотки затем соединяются, обычно внутри, по схеме звезды или треугольника. Три или девять выводов от трехфазных обмоток статора выведены на клемму коробка, установленная на раме двигателя, для подключения одно- или двух напряжений.
Ротор
Вращающаяся часть двигателя состоит из стальных перфораций или пластин.
расположены в цилиндрическом сердечнике (от 5 до 7). Медь или алюминий
штанги монтируются у поверхности ротора. Прутки паяные или
приварен к двум медным концевым кольцам. В некоторых небольших асинхронных двигателях с короткозамкнутым ротором
стержни и концевые кольца отлиты из алюминия как одно целое.
Прутки паяные или
приварен к двум медным концевым кольцам. В некоторых небольших асинхронных двигателях с короткозамкнутым ротором
стержни и концевые кольца отлиты из алюминия как одно целое.
ил 5 показывает такой ротор. Обратите внимание, что ребра залиты в ротор. для циркуляции воздуха и охлаждения двигателя во время его работы. Отметим также, что стержни ротора между кольцами перекошены под углом к граням кольца. Благодаря такой конструкции работающий двигатель будет работать тише и плавнее.На левом конце вала виден шпоночный паз. С помощью этого шпоночного паза можно закрепить шкив или муфту вала нагрузки.
ил. 5 Ротор с короткозамкнутым ротором для асинхронного двигателя; больной. 6 Вид в разрезе
обоймы ротора; больной. 7 Беличья клетка для асинхронного двигателя
ил. 8: Торцевой щиток подшипника скольжения для открытого многофазного двигателя: SLINGER
КОЛЬЦО, МАСЛЯНЫЙ СБОРНИК; больной. 9: Торцевой щиток подшипника скольжения для многофазного
Индукционный двигатель.
9: Торцевой щиток подшипника скольжения для многофазного
Индукционный двигатель.
Подшипники вала
Типовые подшипники скольжения показаны на 8 и 9.Внутри стенки подшипников скольжения выполнены из металла баббита, что обеспечивает гладкая, полированная и длинная изнашиваемая поверхность вала ротора. Большой маслоотражательное кольцо увеличенного размера свободно облегает вал ротора и выдвигается вниз в масляный резервуар. Это кольцо собирает и стягивает масло по вращающемуся вал и опорные поверхности. Два масляных кольца показаны на рисунке 10. Это пленка смазочного масла сводит к минимуму потери на трение. Маслосмотровая чашка на сторона каждого торцевого щита позволяет обслуживающему персоналу проверять уровень масла в подшипнике скольжения.
илл. С 14-11 по 14-14 иллюстрируют шарикоподшипниковые узлы. В некоторых двигателях
вместо подшипников скольжения используются шариковые подшипники.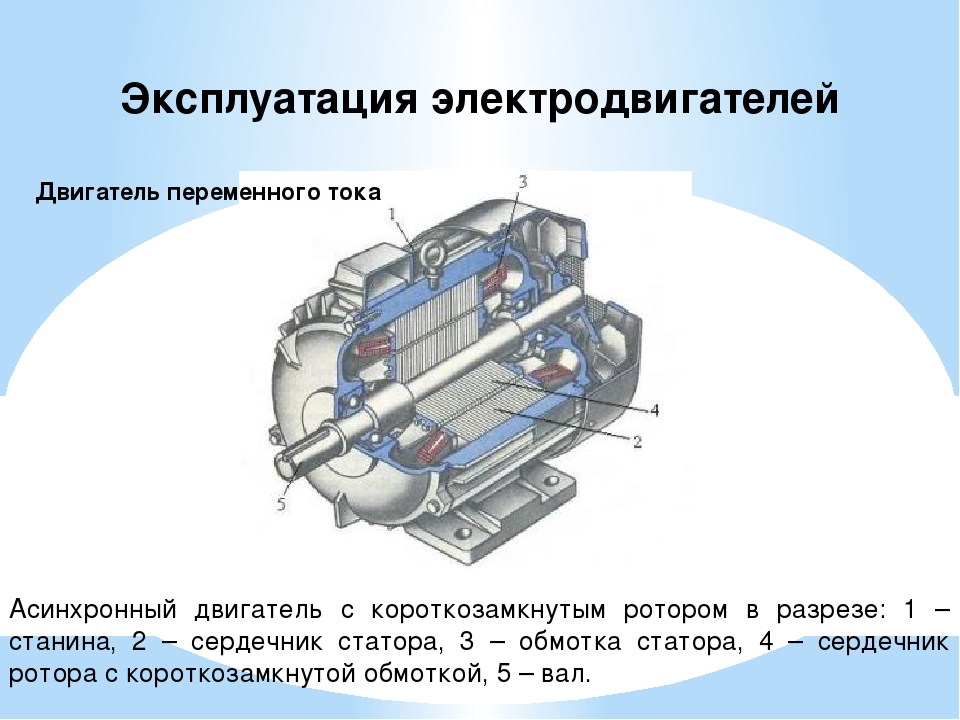 Смазка, а не масло
используется для смазки шариковых подшипников. Этот тип подшипника обычно составляет две трети
полный смазки на момент сборки двигателя. Специальная фурнитура есть
на концевых раструбах, так что шприц для смазки может использоваться для нанесения дополнительных
смазывать шарикоподшипниковые узлы через определенные промежутки времени.
Смазка, а не масло
используется для смазки шариковых подшипников. Этот тип подшипника обычно составляет две трети
полный смазки на момент сборки двигателя. Специальная фурнитура есть
на концевых раструбах, так что шприц для смазки может использоваться для нанесения дополнительных
смазывать шарикоподшипниковые узлы через определенные промежутки времени.
При смазке роликовых подшипников снимите нижнюю заглушку, чтобы старая смазка вытесняется.Технические характеристики двигателя должны Проконсультируйтесь по поводу рекомендованного сорта смазочного материала, процедуры смазки и нагрузок на подшипники.
ил. 10 Частично собранный подшипник скольжения для полностью закрытого,
1250-сильный мотор
ил. 11 Торцевой щиток шарикового подшипника для открытого многофазного двигателя
ил. 12 Врезка однорядного шарикового подшипника:
ил. 13 Одиночный шарикоподшипник закрытого типа.
ил. 14 Подшипник шариковый двухрядный.
ПРИНЦИП РАБОТЫ ДВИГАТЕЛЯ БЛОЧКОМ
Как указано в предыдущем абзаце конструкции статора, пазы сердечника статора содержат три отдельные однофазные обмотки. Когда три токи, разнесенные на 120 электрических градусов, проходят через эти обмотки, вращающийся результаты магнитного поля. Это поле движется по внутренней части статора. ядро. Скорость вращающегося магнитного поля зависит от количества полюса статора и частота источника питания.Эта скорость называется синхронная скорость и определяется по формуле:
Синхронная скорость об / мин = 120 x частота в герцах / количество полюсов
S = 120xf / p
S = синхронная скорость
f = Герцы (частота)
p = Количество полюсов на фазу
Пример 1 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором имеет
шесть полюсов на обмотке статора и подключен к трехфазному, 60 герц
источника, то синхронная скорость вращающегося поля составляет 1200 об / мин-оборотов
В минуту.
S = 120xf / p = 120×60 / 6 = 1,200 об / мин
Поскольку это магнитное поле вращается с синхронной скоростью, оно режет медь стержни ротора и индуцирует напряжения в стержнях беличьей клетки обмотка. Эти наведенные напряжения создают токи в стержнях ротора, которые в свою очередь создают поле в сердечнике ротора. Это поле ротора реагирует с поле статора вызывает скручивающий эффект или крутящий момент, который вращает ротор. Ротор всегда вращается со скоростью немного меньше синхронной скорости. поля статора.Это означает, что поле статора всегда будет сокращать штанги ротора. Если ротор вращается с той же скоростью, что и поле статора, поле статора не режет стержни ротора и не будет индуцированного напряжения или крутящий момент.
Регулировка скорости и проскальзывание
Асинхронный двигатель с короткозамкнутым ротором имеет очень хорошие характеристики регулирования скорости.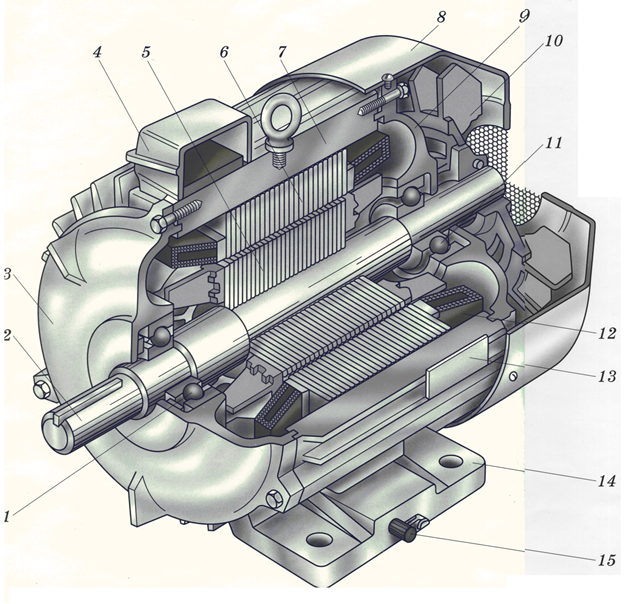 (отношение разницы в скорости от холостого хода до полной нагрузки). Скорость работы
измеряется в процентах скольжения.Синхронная скорость вращения
поле статора используется как ориентир. Напомним, что синхронный
скорость зависит от количества полюсов статора и рабочей частоты.
Поскольку эти две величины остаются постоянными, синхронная скорость также
остается постоянным. Если скорость ротора при полной нагрузке вычитается из
синхронная скорость поля статора, разница в количестве
оборотов в минуту, когда ротор скользит за вращающимся полем
статора.
(отношение разницы в скорости от холостого хода до полной нагрузки). Скорость работы
измеряется в процентах скольжения.Синхронная скорость вращения
поле статора используется как ориентир. Напомним, что синхронный
скорость зависит от количества полюсов статора и рабочей частоты.
Поскольку эти две величины остаются постоянными, синхронная скорость также
остается постоянным. Если скорость ротора при полной нагрузке вычитается из
синхронная скорость поля статора, разница в количестве
оборотов в минуту, когда ротор скользит за вращающимся полем
статора.
Проскальзывание = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Пример 2 . Если трехфазный асинхронный двигатель с короткозамкнутым ротором использованный в примере 1, имеет синхронную скорость 1200 об / мин и полную нагрузку. скорость 1140 об / мин, найти процент скольжения.
Синхронная скорость (Пример 1) = 1200 об / мин
Частота вращения ротора при полной нагрузке = 1140 об / мин
Процент скольжения = [(синхронная скорость — скорость ротора) / синхронная скорость] х 100
Процентное скольжение = [(1200–1140) / 1200] x 100
Процентное скольжение = 60/1200 x 100 = 0. 05 х 100
05 х 100
Процентное скольжение = 5%
Для асинхронного двигателя с короткозамкнутым ротором, поскольку значение процентного скольжения уменьшается в сторону 0% улучшаются скоростные характеристики двигателя. Среднее Диапазон процентного скольжения для асинхронных двигателей с короткозамкнутым ротором составляет от 2% до 6 процентов.
ил. 15: Кривая скорости и кривая скольжения в процентах.
ill 15 показывает кривую скорости и процент проскальзывания для беличьей клетки.
асинхронный двигатель, работающий от холостого хода до полной нагрузки.Скорость ротора
на холостом ходу проскальзывает за синхронной скоростью вращающегося поля статора
ровно достаточно, чтобы создать крутящий момент, необходимый для преодоления трения и ветра
потери без нагрузки. Поскольку на вал двигателя действует механическая нагрузка,
ротор имеет тенденцию замедляться. Это означает, что поле статора (вращающееся
при фиксированной скорости) режет стержни ротора большее количество раз за данную
период. Индуцированные напряжения в стержнях ротора увеличиваются, что приводит к увеличению
ток в стержнях ротора и более сильное поле ротора.Есть большая
магнитная реакция между полями статора и ротора, которая вызывает более сильную
скручивающий эффект или крутящий момент. Это также увеличивает ток статора, снимаемый с
линия. Мотор способен выдерживать повышенную механическую нагрузку с
очень небольшое снижение скорости вращения ротора.
Индуцированные напряжения в стержнях ротора увеличиваются, что приводит к увеличению
ток в стержнях ротора и более сильное поле ротора.Есть большая
магнитная реакция между полями статора и ротора, которая вызывает более сильную
скручивающий эффект или крутящий момент. Это также увеличивает ток статора, снимаемый с
линия. Мотор способен выдерживать повышенную механическую нагрузку с
очень небольшое снижение скорости вращения ротора.
Показаны типичные кривые момента скольжения для асинхронного двигателя с короткозамкнутым ротором.
на рисунке 16. Выходной крутящий момент двигателя в фунт-футах (фунт-фут) увеличивается.
как прямая линия с увеличением значения процентного скольжения как
механическая нагрузка увеличена до точки полной нагрузки.За пределами полной нагрузки,
кривая крутящего момента изгибается и, наконец, достигает максимальной точки, называемой поломкой
крутящий момент. Если двигатель нагружен сверх этой точки, будет соответствующий
уменьшайте крутящий момент до тех пор, пока не будет достигнута точка остановки двигателя.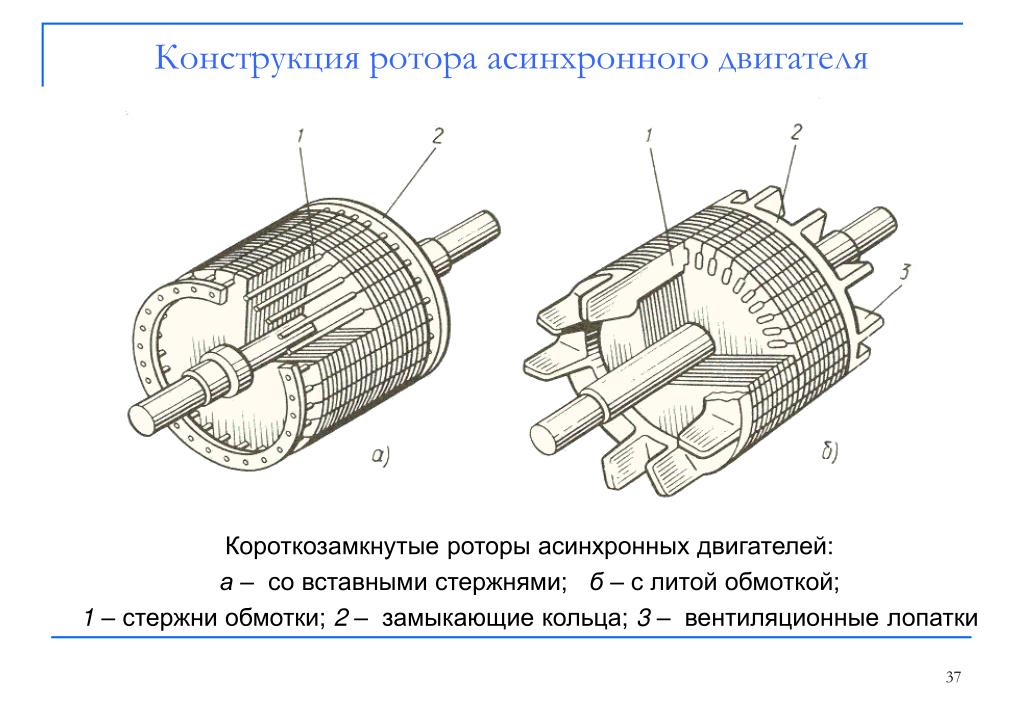 Тем не мение,
все асинхронные двигатели имеют некоторое скольжение для нормальной работы. Пусковой момент
не показан, но составляет примерно 300% рабочего момента.
Тем не мение,
все асинхронные двигатели имеют некоторое скольжение для нормальной работы. Пусковой момент
не показан, но составляет примерно 300% рабочего момента.
Пусковой ток
Когда трехфазный асинхронный двигатель с короткозамкнутым ротором подключен через
полное линейное напряжение, пусковой импульс тока мгновенно достигает
от 400% до 600% или более номинального тока полной нагрузки.В момент запуска двигателя ротор остановлен. В этот момент
следовательно, поле статора режет стержни ротора с большей скоростью, чем когда
ротор вращается. Это означает, что будет относительно высокая индуцированная
напряжение в роторе, которое вызовет сильный ток ротора. Результирующий
входной ток обмоток статора в момент пуска будет высоким.
Из-за этого высокого пускового тока пусковая защита имеет высокий
как 300% от номинального тока полной нагрузки для предохранителей без задержки настройки
Предусмотрено для асинхронных двигателей с короткозамкнутым ротором.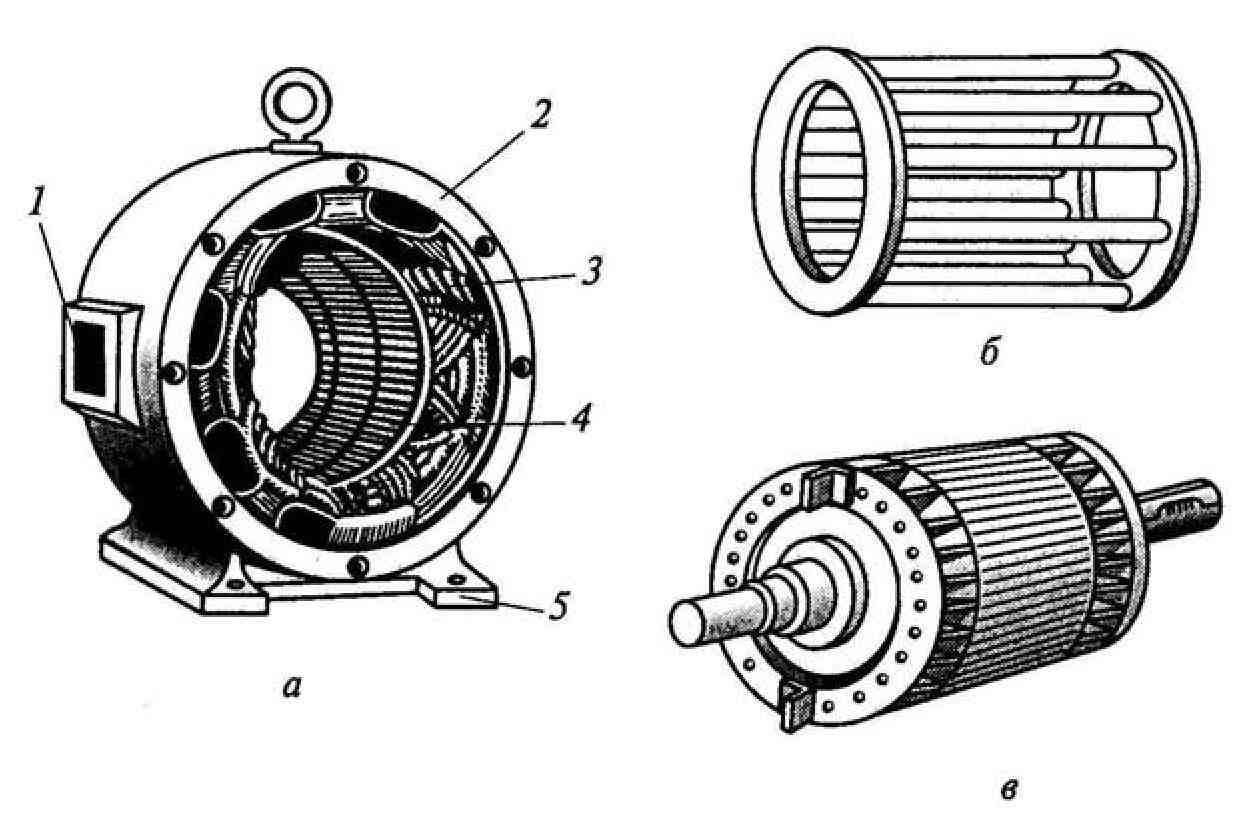
Большинство асинхронных двигателей с короткозамкнутым ротором запускаются при полном напряжении. Если там есть вопросы по запуску крупногабаритных двигателей на полную напряжения, следует проконсультироваться с электроэнергетической компанией. В случае что фидеры и защитные устройства электросети не могут для работы с большими пусковыми токами, пусковыми цепями пониженного напряжения должен использоваться с двигателем.
ил. 16 Кривые момента скольжения для работающего двигателя с короткозамкнутым ротором: ПОЛНАЯ НАГРУЗКА
МОМЕНТ, ПРОСМОТР, МОМЕНТ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ, МОМЕНТ ПРОБИРАТЕЛЬНОГО МОМЕНТА
Коэффициент мощности
Низкий коэффициент мощности асинхронного двигателя с короткозамкнутым ротором на холостом ходу и при низкой нагрузке.Без нагрузки коэффициент мощности может составлять всего
Отставание на 15 процентов. Однако, когда к двигателю приложена нагрузка, мощность
фактор увеличивается. При номинальной нагрузке коэффициент мощности может достигать
Отставание от 85 до 90 процентов.
При номинальной нагрузке коэффициент мощности может достигать
Отставание от 85 до 90 процентов.
Коэффициент мощности на холостом ходу низкий, поскольку намагничивающая составляющая входной ток составляет большую часть от общего входного тока двигателя. Когда нагрузка на двигатель увеличивается, подающий синфазный ток к двигателю увеличивается, но намагничивающая составляющая тока остается практически то же самое.Это означает, что результирующий линейный ток больше почти в фазе с напряжением, и коэффициент мощности улучшается, когда двигатель нагружен, по сравнению с ненагруженным двигателем, имеющим намагничивание ток как основной компонент входного тока.
ил 17 показывает увеличение коэффициента мощности в состоянии холостого хода.
до полной загрузки. На диаграмме холостого хода синфазный ток (Iw) невелик.
по сравнению с током намагничивания (Im), таким образом, коэффициент мощности равен
плохой без нагрузки. На диаграмме полной нагрузки синфазный ток увеличился
при этом ток намагничивания остается прежним. В результате угол
задержки линейного тока уменьшается, а коэффициент мощности увеличивается.
На диаграмме полной нагрузки синфазный ток увеличился
при этом ток намагничивания остается прежним. В результате угол
задержки линейного тока уменьшается, а коэффициент мощности увеличивается.
ил. 17 Коэффициент мощности без нагрузки и при полной нагрузке. БОЛЬШОЙ УГОЛ ОТСТАВКИ —
НИЗКИЙ КОЭФФИЦИЕНТ МОЩНОСТИ, БЕЗ НАГРУЗКИ, ПОЛНАЯ НАГРУЗКА
Реверс вращения
Направление вращения трехфазного асинхронного двигателя можно реверсировать охотно.Двигатель будет вращаться в противоположном направлении, если любые два из три линейных провода перевернуты (рис. 18). Отведения перевернуты у мотора.
ил. 18: Обратное вращение асинхронного двигателя: ВРАЩЕНИЕ ДО / ПОСЛЕ
ПОДКЛЮЧЕНИЯ ИЗМЕНЕНЫ
Контроль скорости
Асинхронный двигатель с короткозамкнутым ротором почти не изменяет скорость без
внешний контроль. Напомним, что скорость двигателя зависит от частоты
трехфазного источника и числа полюсов обмотки статора.
Частота питающей сети обычно 60 герц, поддерживается по этой стоимости местной энергокомпанией. Поскольку количество полюсов в двигателе также есть фиксированное значение, синхронная скорость двигателя остается постоянным. В результате невозможно получить диапазон скорость без изменения применяемой частоты. Его можно контролировать с помощью система электронного привода переменного тока с регулируемой частотой или путем изменения количества опор с помощью внешних контроллеров.
ИНДУКЦИОННЫЕ ДВИГАТЕЛИ С ДВОЙНЫМ НАПРЯЖЕНИЕМ
Многие трехфазные асинхронные двигатели с короткозамкнутым ротором предназначены для работы при двух разных номинальных напряжениях. Например, типичное двойное напряжение для трехфазного двигателя 230/460 вольт.
ил 19 показывает типичную обмотку статора, соединенную звездой, которая может быть
используется либо для 230 вольт, трехфазный, либо для 460 вольт, трехфазный.![]() Каждый
из трех однофазных обмоток состоят из двух обмоток катушки.Там
это девять выводов, выведенных наружу из обмотки статора этого типа.
Эти выводы, обозначенные как выводы с 1 по 9, заканчиваются в клеммной коробке
мотор. Чтобы отметить выводы, начните с верхнего левого вывода T1 и продолжайте движение по часовой стрелке по спирали к центру, отмечая
каждый вывод, как показано на рисунке.
Каждый
из трех однофазных обмоток состоят из двух обмоток катушки.Там
это девять выводов, выведенных наружу из обмотки статора этого типа.
Эти выводы, обозначенные как выводы с 1 по 9, заканчиваются в клеммной коробке
мотор. Чтобы отметить выводы, начните с верхнего левого вывода T1 и продолжайте движение по часовой стрелке по спирали к центру, отмечая
каждый вывод, как показано на рисунке.
ил. 19: Метод определения маркировки клемм.
ил. 20: соединение звездой на 460 В. Катушки соединены последовательно.
ил 20 показывает соединения, необходимые для управления двигателем от 460-вольтовый, трехфазный источник. Две катушки каждой однофазной обмотки соединены последовательно, илл. 14-21 показаны соединения, позволяющие работать от трехфазного источника на 230 В.
ил. 21: соединение звездой 230 В. Катушки подключены параллельно.
Двигатели с соединением звездой
Если идентификация отведения 9-проводная (двойное напряжение), 3-фазная, звезда подключена
двигатель был разрушен, электрик должен повторно идентифицировать их перед
подключение двигателя к линии. Можно использовать следующий метод. Первый,
определить внутренне подключенную точку звезды, проверив целостность цепи
между тремя выводами, как на рисунке 22 A.
Можно использовать следующий метод. Первый,
определить внутренне подключенную точку звезды, проверив целостность цепи
между тремя выводами, как на рисунке 22 A.
Затем идентифицируйте три других набора катушек по непрерывности между двумя ведет за один раз (илл. 22 B). Назначьте T7, T8 и T9 любому из трех выводы постоянных катушек, соединенных звездой (а). Применить более низкий рейтинг линейное напряжение двигателя к T7, T8 и T9 и работайте, чтобы проверить направление вращения.Отключите сетевое напряжение и подключите один из неопределенных катушки к T Подключите питание, оставив линии на T7, T8 и T9. Если катушка правильно подключена и является правильной катушкой, напряжение должно быть примерно в 1,5 раза выше линейного напряжения между свободным концом и другим две строки. Остерегайтесь сетевого напряжения.
Если выбрана правильная катушка, но установлено обратное, напряжение между
свободный конец и два других вывода будут составлять около 58% сетевого напряжения.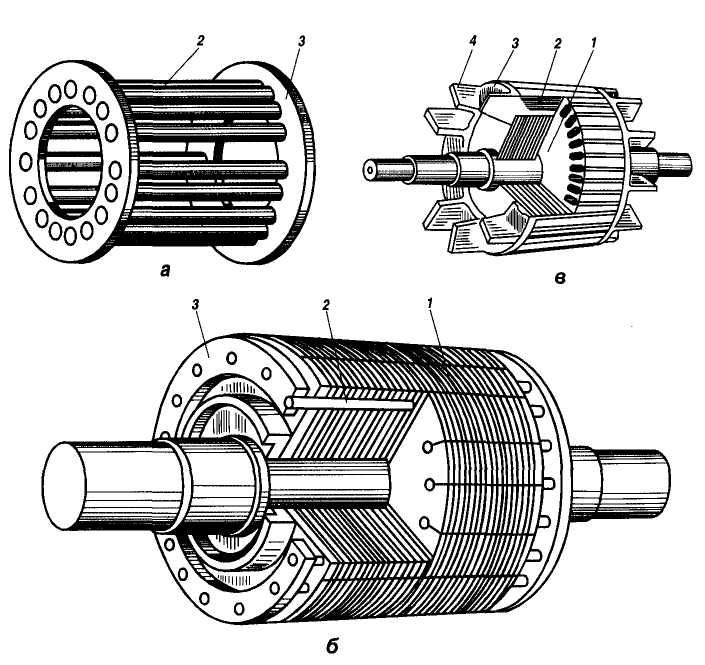 Если выбрана неправильная катушка, разница напряжений между свободными
конец и два других провода будут неровными (см. рис. 22 C).
Если выбрана неправильная катушка, разница напряжений между свободными
конец и два других провода будут неровными (см. рис. 22 C).
Когда показания равны и примерно в 1,5 раза больше напряжения сети, пометьте провод, подключенный к T7, как T4, а другой конец катушки как T1.
Выполните те же испытания с другой катушкой, подключенной к T. Отметьте эти провода. T и T Выполните тот же тест с последней катушкой, подключенной к 19, чтобы определить 13 и 16 отведения.
Подключите L1 к T1, L2 к T2, L3 к T3 и T4 к T7, T5 к T8, T6 к T9 и включите двигатель. Двигатель должен работать в том же направлении, что и раньше и работать спокойно.
ил. 22: Двигатель, подключенный звездой или звездой; A) Внутренняя маркировка выводов звезды;
B) Маркировка выводов группы катушек C) Проверка правильности маркировки выводов катушек на
Двигатель с двойным напряжением, соединенный звездой
Двигатели, соединенные треугольником
Другой способ подключения трехфазных двигателей — соединение треугольником. мотор.Он назван так потому, что получившийся схематический узор выглядит как
греческая буква Дельта (символ дельты).
мотор.Он назван так потому, что получившийся схематический узор выглядит как
греческая буква Дельта (символ дельты).
Метод идентификации и подключения этих выводов необходим, поскольку он отличается от двигателя, подключенного звездой или звездой.
Правильное подключение выводов треугольник подключен, трехфазный, Двигатель с двойным напряжением представляет проблему, если маркировка выводов повреждена.
ил. 23: Девять выводов треугольника, трехфазного, двойного напряжения
двигатель
Сначала электрик должен определить, подключен ли двигатель треугольником. или звезда подключена.Оба двигателя имеют девять выводов, если они двухвольтные. моторы. Однако двигатель, подключенный по схеме треугольника, имеет три комплекта по три провода. которые имеют непрерывность, а двигатель, подключенный звездой, имеет только один комплект из трех.
Для продолжения необходим чувствительный омметр, чтобы найти середину каждого
группа из трех отведений. Значения сопротивления низкие при использовании постоянного тока
омметр, поэтому будьте осторожны при определении центра каждой группы катушек.
Обозначьте центр каждой группы T1, T2 и T3 соответственно.Использование маскировки
ленты, временно обозначьте другие отведения группы T1 как T4 и T9.
больной 23 А.
Значения сопротивления низкие при использовании постоянного тока
омметр, поэтому будьте осторожны при определении центра каждой группы катушек.
Обозначьте центр каждой группы T1, T2 и T3 соответственно.Использование маскировки
ленты, временно обозначьте другие отведения группы T1 как T4 и T9.
больной 23 А.
Временно отметьте концы группы T2 как T5 и T7 и отметьте концы группы Т3 как Т6 и Т8.
Подключите двигатель с более низким номинальным напряжением, используя линии 1, 2 и 3, к T1, Т4 и Т9. Остальные катушки будут иметь наведенное напряжение, поэтому будьте осторожны, прикоснуться к другим свободным проводам друг к другу или к вам!
Отключите питание и подсоедините провод с маркировкой T4 к T7.Подключите
мощность, как и раньше, и считайте напряжение между T1 и T2. Если маркировка
правильные, напряжение должно быть примерно в два раза выше приложенного линейного напряжения
Если он показывает примерно в 1,5 раза больше напряжения в сети, снова подключите T4 к проводу. отмечен T5. Если напряжение T1 — T2 затем упадет до 220, повторно подключите T9 к T7.
тем самым меняя обе катушки. Когда напряжение от T1 до T2 равно удвоенному значению
приложенного сетевого напряжения, пометьте соединенные вместе провода как T4 от
Группа T1 подключена к T7 группы T2.
отмечен T5. Если напряжение T1 — T2 затем упадет до 220, повторно подключите T9 к T7.
тем самым меняя обе катушки. Когда напряжение от T1 до T2 равно удвоенному значению
приложенного сетевого напряжения, пометьте соединенные вместе провода как T4 от
Группа T1 подключена к T7 группы T2.
Теперь используйте третью группу катушек. Оставьте нижнюю линию напряжения подключенной к первая группа по-прежнему. Проверьте и подключите провода так, чтобы при включении T9 подключенный к проводу третьей группы, напряжение T1-to-T2 в два раза больше приложенное линейное напряжение. Пометьте провод, подключенный к T9, как T6, а другой конец группы катушек как T8.
Чтобы дважды проверить, отсоедините провод линии от T9 и снова подключите к T7.
отсоедините сетевой провод от T1 и снова подсоедините его к T2, отсоедините
провод от T9 и снова подключите его к T5 Двигатель должен работать в том же
направление как раньше. Если этого не произошло, еще раз проверьте маркировку проводов.
Если этого не произошло, еще раз проверьте маркировку проводов.
Для дальнейшей проверки переместите провода от T7 к T8, от T2 к T6 и от T5 к T3. Запустить мотор. Поворот должен быть таким же, как и в предыдущем шаги. Будьте осторожны! На другие обмотки наведено напряжение. (см. илл 24).
ил. 24 Иллюстрация испытаний напряжением, используемых для определения правильного вывода
маркировка на моторе Delta
ТАБЛИЧКА ДВИГАТЕЛЯ
Таблички с паспортными данными двигателясодержат информацию, важную для правильного выбора и установки двигателя.Наиболее полезные данные, указанные на заводской табличке, относятся к к электрическим характеристикам двигателя. Зная эту информацию и используя Национальный электротехнический кодекс, электрик может определить размеры кабелепровода, провода и пусковой и работающей защиты. (NEC дает минимальные требования.)
Данные о конструкции и производительности, указанные на паспортной табличке, полезны для технического обслуживания. персонал. Информация жизненно важна для быстрой и правильной замены
двигателя, если необходимо.Для лучшего понимания мотора типичный
Информация на паспортных табличках двигателя описывается следующим образом (рис. 25).
персонал. Информация жизненно важна для быстрой и правильной замены
двигателя, если необходимо.Для лучшего понимания мотора типичный
Информация на паспортных табличках двигателя описывается следующим образом (рис. 25).
• Название производителя
• Тип определяет тип корпуса. Это производитель система кодовой идентификации.
• Серийный номер — это конкретный идентификатор двигателя. Это человек номер, присвоенный двигателю, похожий на номер социального страхования для человек. Он хранится у производителя.
• Номер модели является дополнительной идентификацией производителя, обычно используется для заказа.
• Размер корпуса определяет размеры двигателя.
• Коэффициент обслуживания (или SF) — коэффициент обслуживания 1,0 означает, что нельзя ожидать, что двигатель будет обеспечивать мощность, превышающую номинальную. Мотор будет
безопасно работать, если номинальная мощность в лошадиных силах умножена на коэффициент обслуживания,
максимум.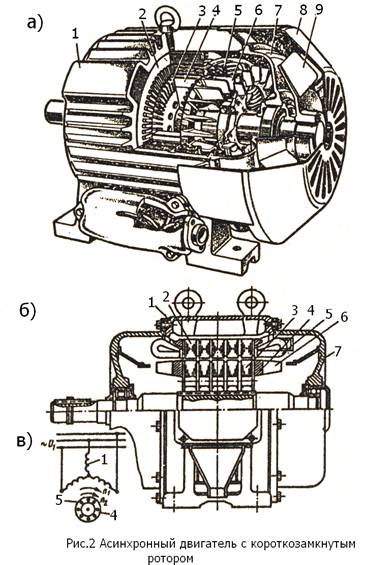 Общие сервисные коэффициенты от 1,0 до 1.15. Рекомендуется, чтобы
двигатель не может работать непрерывно в диапазоне эксплуатационного коэффициента. Это может
сократить срок службы изоляционной системы.
Общие сервисные коэффициенты от 1,0 до 1.15. Рекомендуется, чтобы
двигатель не может работать непрерывно в диапазоне эксплуатационного коэффициента. Это может
сократить срок службы изоляционной системы.
Ампер означает ток, потребляемый из линии, когда двигатель работает. при номинальном напряжении и частоте при полной номинальной мощности, указанной на паспортной табличке.
• Вольт должно быть значением, измеренным на клеммах двигателя, и должно быть значением, на которое рассчитан двигатель.
• Класс изоляции относится к изоляционному материалу, используемому в обмотке. статор двигателя.Например, в системе класса B максимальная рабочая температура 130 ° С; для класса F это 155 ° C; а для класса H это 180 ° С.
• Об / мин (или об / мин) означает скорость в оборотах в минуту, когда все остальные соблюдены условия паспортной таблички.
• Герцы — это частота энергосистемы, для которой предназначен двигатель.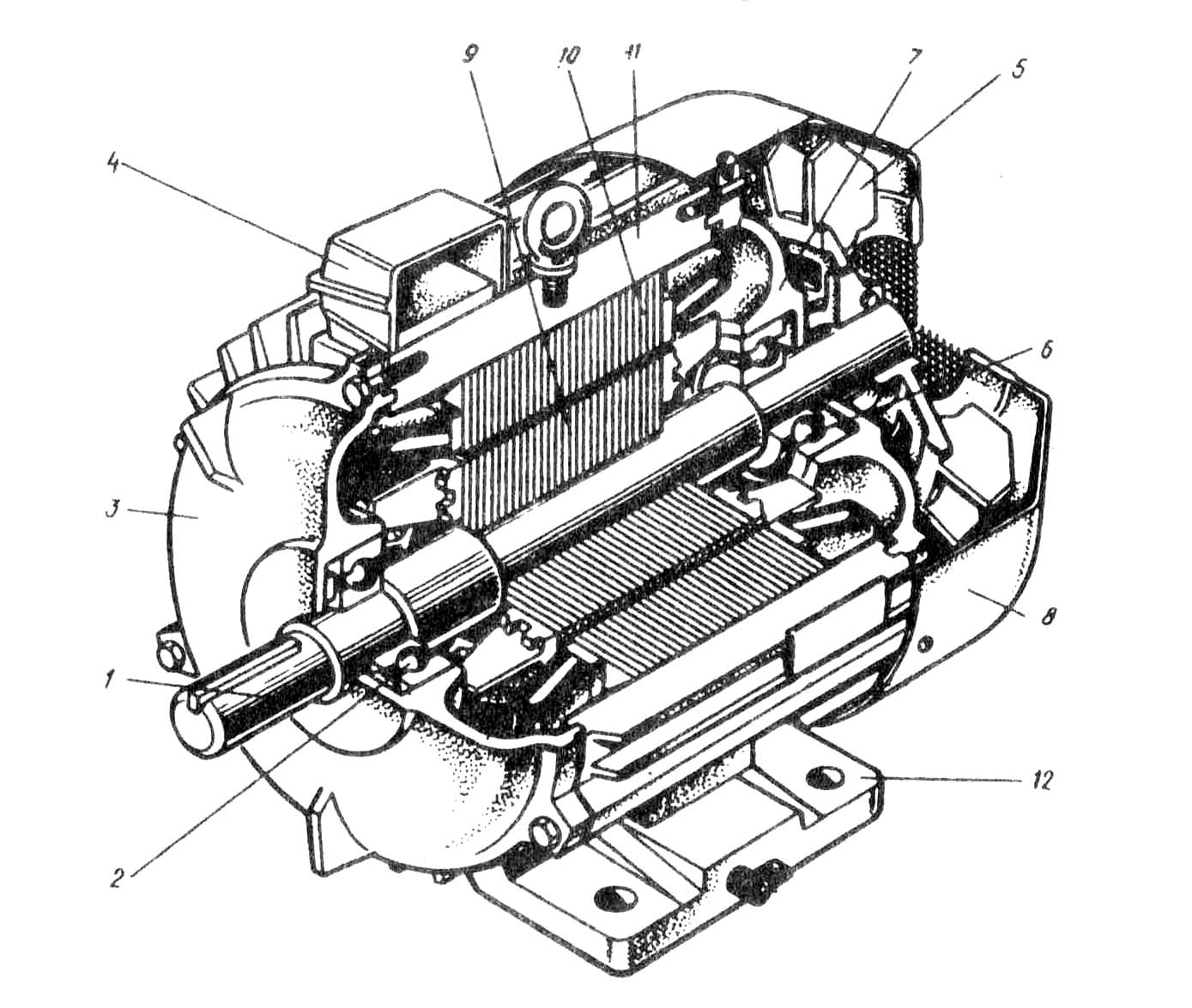 Производительность будет изменена, если он будет работать на других частотах.
Производительность будет изменена, если он будет работать на других частотах.
• Режим работы — это рабочий цикл, при котором двигатель может безопасно работать.«Непрерывный» означает, что двигатель может работать с полной нагрузкой 24 часа в сутки. Если «средний» отображается временной интервал. Это означает, что двигатель может работать при полной загрузке за указанный период. Затем следует остановить двигатель и дать ему остыть перед повторным запуском.
• Температура окружающей среды указывает максимальную температуру окружающего воздуха. при которой двигатель может работать для обеспечения номинальной мощности.
• Ввод фазы указывает количество фаз напряжения, при которых двигатель предназначен для работы.
• кВА — буквенный код, обозначающий заблокированный ротор, кВА на
Лошадиные силы. Это используется для определения пускового оборудования и защиты.
для мотора. Таблицу кодовых букв можно найти в Национальном Электротехническом
Код.
• КПД выражается в процентах. Это значение находится в стандартном двигатели, а также двигатели с «премиальной эффективностью».
• Шум — некоторые двигатели имеют низкий уровень шума. Уровень шума Данные на паспортной табличке измеряются в единицах звука «дБА».
• Примечания производителя — список конкретных характеристик двигателей, таких как «Термозащищенные» и / или «подшипники со шкалой».
ВЫСОТА
Гарантии производителя для стандартных двигателей обычно основаны на
при работе на любой высоте до 3300 футов. Двигатели пригодны к эксплуатации
на высоте более 3300 футов над уровнем моря имеют особую конструкцию и / или другой класс изоляции. Например, стандартные двигатели
с коэффициентом обслуживания 1.15 может эксплуатироваться на высоте до 9900
футов, используя коэффициент обслуживания. На высоте 9900 футов
коэффициент обслуживания будет 1,00. Может потребоваться снизить мощность двигателя. или используйте рамку большего размера.
или используйте рамку большего размера.
РЕЗЮМЕ
Трехфазные асинхронные двигатели используют в роторе короткозамкнутую обмотку. К ротору нет электрических соединений, но возникает ток. в обмотки ротора за счет электромагнитной индукции.Беличья клетка обмотка создает магнитное поле, которое толкает и тянет статор магнитное поле.
Ротор поддерживается стальным валом, который должен вращаться. Вал допускается вращение с применением различных типов подшипников и различных смазок. Синхронная скорость, регулировка скорости и процент скольжения все расчеты используются для определения скорости ротора. Мотор электрические характеристики, такие как коэффициент мощности и пусковой ток связанных с электрической схемой двигателя.
Если маркировка выводов двигателя разрушена, выводы можно пометить заново.
в соответствии с процедурами, описанными в данном разделе. Данные паспортной таблички двигателя
является важной информацией, которую следует использовать при заказе двигателей на замену. Несколько
информация на паспортной табличке важна для правильной замены рабочего
характеристики и другие данные используются для расчета параметров электропитания и защиты двигателя.
Несколько
информация на паспортной табличке важна для правильной замены рабочего
характеристики и другие данные используются для расчета параметров электропитания и защиты двигателя.
ВИКТОРИНА
A. Ответьте на следующие утверждения и вопросы.
1. Перечислите основные части асинхронного двигателя с короткозамкнутым ротором. ___________
2. Назовите два преимущества использования асинхронного двигателя с короткозамкнутым ротором. _______
3. Назовите два недостатка асинхронного двигателя с короткозамкнутым ротором. ________
4. Перечислите два фактора, которые определяют синхронную скорость индукции. мотор.
5. Объясните, как изменить направление вращения трехфазного, асинхронный двигатель с короткозамкнутым ротором.
6. Четырехполюсный трехфазный асинхронный двигатель с короткозамкнутым ротором с частотой 60 Гц имеет
скорость полной нагрузки 1725 об / мин.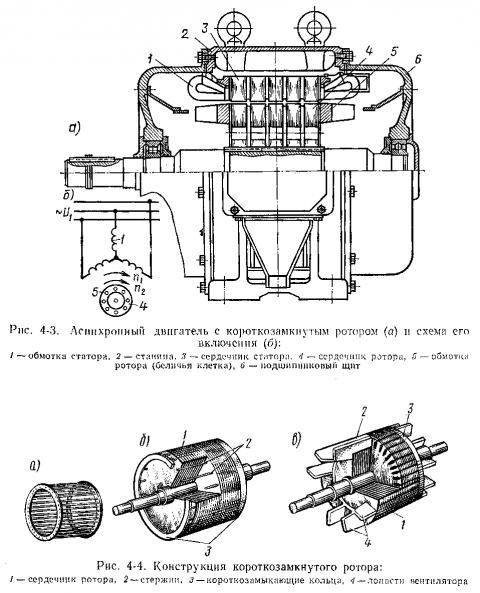 Определите синхронную скорость этого
мотор.
Определите синхронную скорость этого
мотор.
7. Какой процент пробуксовки двигателя указан в вопросе 6? ______________
8. Почему термин «беличья клетка» применяется к этому типу трехфазной индукции? мотор?
B. Выберите правильный ответ для каждого из следующих заявления.
9.Кто или что определяет, можно ли запускать большие асинхронные двигатели при полное напряжение на линии?
а. максимальный размер двигателя
г. номинальное напряжение
г. Энергетическая компания
г. отдел строительства и безопасности
10. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего разгружен __
а. так же, как и при полной загрузке.
г. очень бедный.
г. очень хорошо.
г. в среднем.
11. Коэффициент мощности трехфазного асинхронного двигателя с короткозамкнутым ротором, работающего с полной нагрузкой _____
а. улучшается без нагрузки.
улучшается без нагрузки.
г. уменьшается от холостого хода.
г. остается таким же, как и без нагрузки.
г. становится 100 процентов.
12. Асинхронный двигатель с короткозамкнутым ротором популярен благодаря своим характеристикам. из:
а. высокий процент скольжения.
г.низкий процент скольжения.
г. простая, прочная конструкция.
г. хорошая регулировка скорости.
13. Скорость асинхронного двигателя с короткозамкнутым ротором зависит от:
а. приложенное напряжение.
г. частота и количество полюсов.
г. Напряженность поля.
г. сила тока.
14. Скорость рассчитывается по формуле:
а. p = (120xf) / об / мм
г. Обороты = 120xp / f
г.Обороты = (p x f) / 120
г. Об / мин = 120xf) / p
C. Нарисуйте следующие схемы подключения.
15. Покажите схему подключения девяти оконечных выводов соединенного звездой
трехфазный двигатель на 230/460 вольт для работы при 460 вольт, три
фаза.
Покажите схему подключения девяти оконечных выводов соединенного звездой
трехфазный двигатель на 230/460 вольт для работы при 460 вольт, три
фаза.
16. Покажите схему подключения девяти клеммных проводов соединенного звездой. трехфазный двигатель на 230/460 вольт для работы при 230 вольт, трехфазный.
Асинхронный двигатель с короткозамкнутым ротором
Ротор асинхронного двигателя может быть либо с фазным ротором, либо с короткозамкнутым ротором. В большинстве коммерческих и промышленных применений обычно используются трехфазные асинхронные двигатели с короткозамкнутым ротором. Показан типичный асинхронный двигатель с короткозамкнутым ротором. Ротор сконструирован с использованием ряда одиночных стержней, замкнутых накоротко концевыми кольцами и расположенных в конфигурации «хомячок» или «беличья клетка». При подаче напряжения на обмотку статора создается вращающееся магнитное поле.Это вращающееся магнитное поле вызывает индуцирование напряжения в роторе, которое, поскольку стержни ротора представляют собой по существу одновитковые катушки, заставляет токи течь в стержнях ротора. Эти токи ротора создают собственное магнитное поле, которое взаимодействует с магнитным полем статора, создавая крутящий момент. Возникающий в результате крутящий момент вращает ротор в том же направлении, что и вращение магнитного поля, создаваемого статором. В современных асинхронных двигателях самый распространенный тип ротора имеет литые алюминиевые проводники и замыкающие концевые кольца.
Эти токи ротора создают собственное магнитное поле, которое взаимодействует с магнитным полем статора, создавая крутящий момент. Возникающий в результате крутящий момент вращает ротор в том же направлении, что и вращение магнитного поля, создаваемого статором. В современных асинхронных двигателях самый распространенный тип ротора имеет литые алюминиевые проводники и замыкающие концевые кольца.Сопротивление короткозамкнутого ротора оказывает важное влияние на работу двигателя. Ротор с высоким сопротивлением развивает высокий пусковой крутящий момент при низком пусковом токе. Ротор с низким сопротивлением обеспечивает низкое скольжение и высокий КПД при полной нагрузке. На рисунке 36 показано, как крутящий момент двигателя изменяется в зависимости от скорости ротора для трех асинхронных двигателей с короткозамкнутым ротором типа NEMA:
NEMA Design B — считается стандартным типом с нормальным пусковым моментом, низким пусковым током и низким скольжением при полной нагрузке.Подходит для широкого спектра применений, таких как вентиляторы и нагнетатели, для которых требуется нормальный пусковой момент.
NEMA Design C — Этот тип имеет более высокое сопротивление ротора, чем стандартное, что улучшает коэффициент мощности ротора при запуске, обеспечивая больший пусковой крутящий момент. Однако при нагрузке это дополнительное сопротивление вызывает большее скольжение. Используется для оборудования, такого как насос, для которого требуется высокий пусковой момент.
NEMA Design D — Еще более высокое сопротивление ротора этого типа обеспечивает максимальный пусковой момент.Этот тип подходит для оборудования с очень высокой инерцией пуска, такого как краны и подъемники.
Рабочие характеристики двигателя с короткозамкнутым ротором следующие:
- Двигатель обычно работает практически с постоянной скоростью, близкой к синхронной.
- Большие пусковые токи, требуемые для этого двигателя, могут привести к колебаниям напряжения в сети.
- При замене любых двух из трех основных линий электропередачи на двигатель направление вращения меняется на обратное.
- После запуска двигатель будет продолжать работать с обрывом фазы как однофазный двигатель. Ток, потребляемый от оставшихся двух линий, почти удвоится, и двигатель будет перегреваться.Двигатель не запустится с места, если он потерял фазу.
Если бы ротор вращался с той же скоростью, с которой вращается поле, не было бы относительного движения между ротором и полем и индуцированного напряжения. Поскольку ротор скользит относительно вращающегося магнитного поля статора, в роторе индуцируются напряжение и ток.
Разница между скоростью вращающегося магнитного поля и ротора в асинхронном двигателе называется скольжением и выражается в процентах от синхронной скорости следующим образом:
Процентное скольжение = [Синхронная скорость — Фактическая скорость / Синхронная скорость ] × 100
Скольжение увеличивается с нагрузкой и необходимо для создания полезного крутящего момента.Обычная величина скольжения в трехфазном двигателе с частотой 60 Гц составляет 2 или 3%.
===
Проблема: определить процент скольжения асинхронного двигателя, имеющего синхронную скорость 1800 об / мин и номинальную фактическую скорость 1750 об / мин.
Решение: Проскальзывание = Синхронная скорость — Фактическая скорость / Синхронная скорость × 100 = 1800 — 1750/1800 × 100 = 2,78%
===
Нагрузка асинхронного двигателя аналогична нагрузке на трансформатор в том, что работа обоих включает изменение магнитных потоков относительно первичной (статорной) обмотки и вторичной (роторной) обмотки.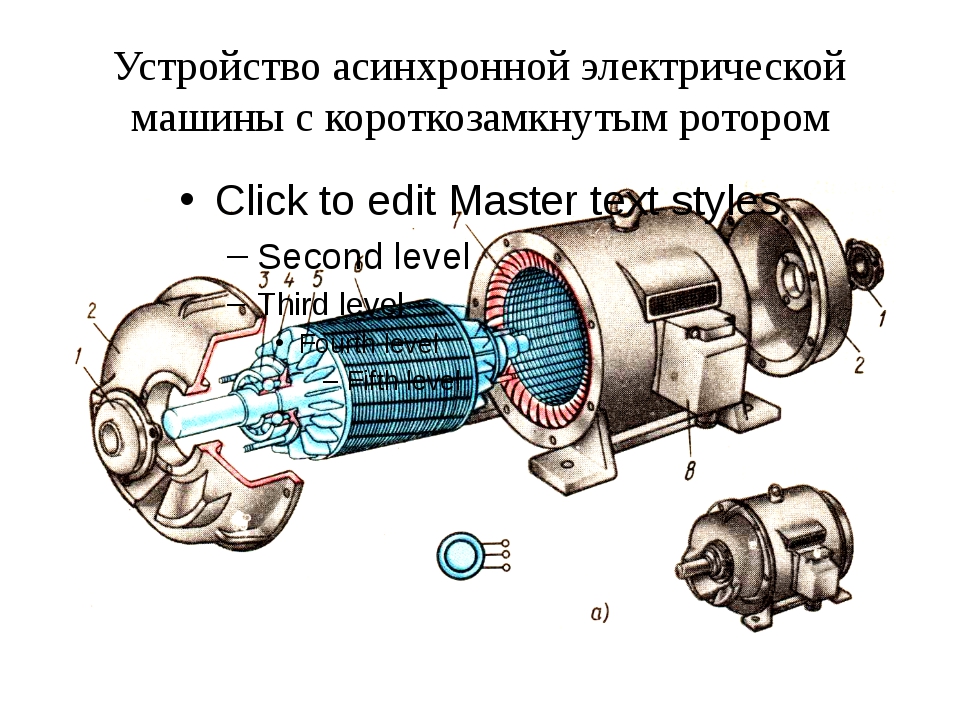 Ток холостого хода невелик и похож на ток возбуждения в трансформаторе.
Ток холостого хода невелик и похож на ток возбуждения в трансформаторе.
Таким образом, он состоит из намагничивающего компонента, который создает вращающийся поток, и небольшого активного компонента, который обеспечивает потери на сопротивление воздуха и трение в роторе, а также потери в стали в статоре. Когда асинхронный двигатель находится под нагрузкой, ток ротора создает встречный магнитный поток, который, следовательно, ослабляет поток статора. Это позволяет протекать большему току в обмотках статора, так же как увеличение тока во вторичной обмотке трансформатора приводит к соответствующему увеличению первичного тока.
Вы можете вспомнить, что коэффициент мощности (PF) определяется как отношение фактической (или истинной) мощности (ватт) к полной мощности (вольт-амперы) и является мерой того, насколько эффективно потребляется ток, потребляемый двигателем. превращается в полезную работу. Ток возбуждения двигателя и реактивная мощность под нагрузкой остаются примерно такими же, как и без нагрузки.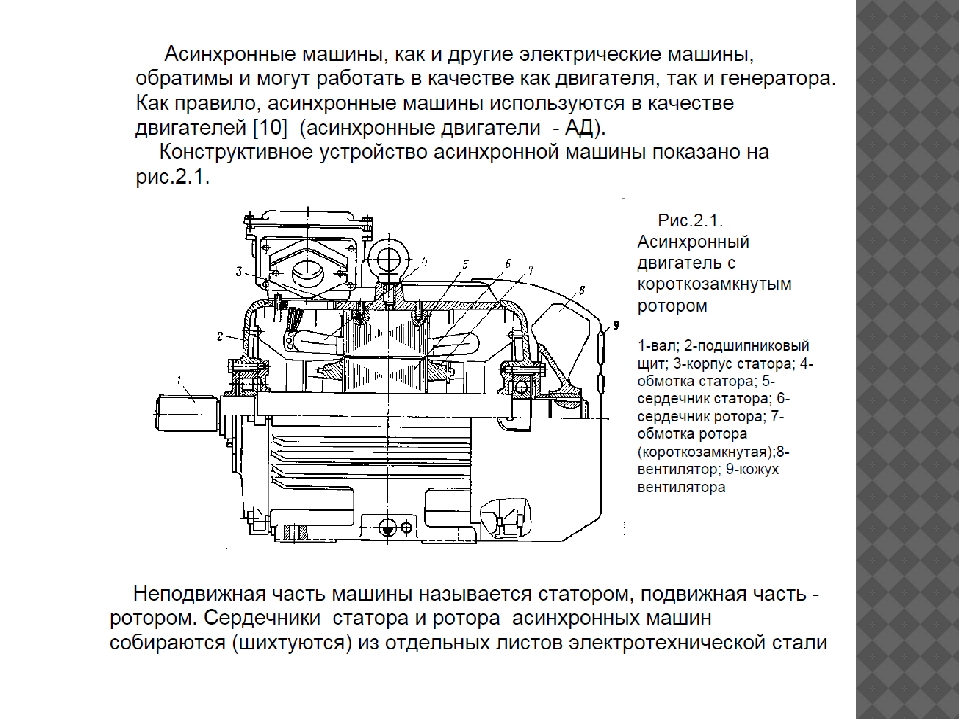 По этой причине, когда двигатель работает без нагрузки, коэффициент мощности очень низкий по сравнению с тем, когда он работает с полной нагрузкой. При полной нагрузке коэффициент мощности колеблется от 70% для небольших двигателей до 90% для более крупных двигателей.
По этой причине, когда двигатель работает без нагрузки, коэффициент мощности очень низкий по сравнению с тем, когда он работает с полной нагрузкой. При полной нагрузке коэффициент мощности колеблется от 70% для небольших двигателей до 90% для более крупных двигателей.
Асинхронные двигатели работают с максимальной эффективностью, если их размер соответствует нагрузке, которую они будут приводить. Двигатели большого размера не только работают неэффективно, но и требуют более высоких первоначальных затрат, чем двигатели правильного размера.
В момент запуска двигателя во время периода ускорения двигатель потребляет высокий пусковой ток. Этот пусковой ток также называется током заторможенного ротора. Обычные асинхронные двигатели, запускаемые при номинальном напряжении, имеют пусковые токи с заторможенным ротором, которые в 6 раз превышают ток полной нагрузки, указанный на паспортной табличке.Ток при заблокированном роторе в значительной степени зависит от типа конструкции стержня ротора и может быть определен по буквенным обозначениям конструкции NEMA, указанным на паспортной табличке.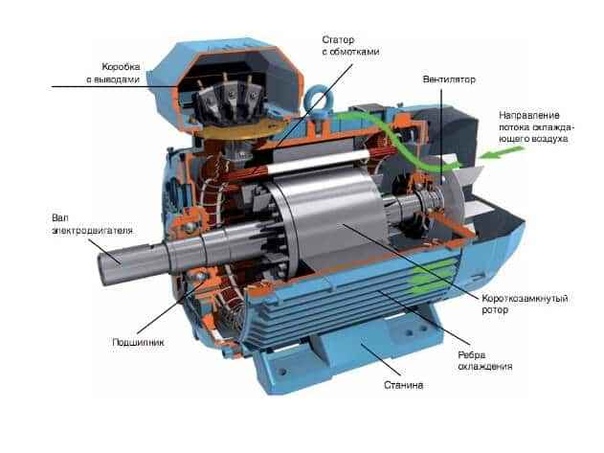
Высокий ток двигателя с заторможенным ротором может вызвать провалы или провалы напряжения в линиях электропередач, что может вызвать нежелательное мерцание света и проблемы с другим работающим оборудованием. Кроме того, двигатель, который потребляет чрезмерный ток в условиях заторможенного ротора, с большей вероятностью вызовет ложное срабатывание защитных устройств во время запуска двигателя.
Односкоростной двигатель имеет одну номинальную скорость, на которой он работает, если напряжение и частота указаны на паспортной табличке. Многоскоростной двигатель будет работать с более чем одной скоростью, в зависимости от того, как обмотки соединены для образования разного числа магнитных полюсов. Двухскоростные однообмоточные двигатели называются последовательными полюсными двигателями. Низкая скорость однообмоточного двигателя с последовательным полюсом всегда составляет половину более высокой скорости. Если требования диктуют скорость с любым другим передаточным числом, необходимо использовать двухобмоточный двигатель. В двигателях с раздельной обмоткой в двигатель устанавливается отдельная обмотка для каждой желаемой скорости.
В двигателях с раздельной обмоткой в двигатель устанавливается отдельная обмотка для каждой желаемой скорости.
В однообмоточных двигателях с последовательными полюсами обмотки статора расположены таким образом, что число полюсов можно изменять путем реверсирования некоторых токов катушки.
Посредством специальных подключений к этим выводам обмотки можно соединять последовательно треугольником или звездой.
Последовательное соединение треугольником приводит к низкой скорости, а параллельное соединение звездой — к высокой. Номинальный крутящий момент будет одинаковым на обеих скоростях.Если обмотка такова, что последовательное соединение треугольником дает высокую скорость, а параллельное соединение звездой — низкую скорость, номинальная мощность в лошадиных силах одинакова на обеих скоростях.
Односкоростные асинхронные двигатели переменного тока часто поставляются с несколькими внешними выводами для различных номинальных напряжений в приложениях с фиксированной частотой. Несколько выводов могут быть спроектированы так, чтобы обеспечивать повторное соединение последовательно или параллельно, повторное соединение звезда-треугольник или их комбинации.
Несколько выводов могут быть спроектированы так, чтобы обеспечивать повторное соединение последовательно или параллельно, повторное соединение звезда-треугольник или их комбинации.
Типовые соединения для последовательного и параллельного переподключений с двойным напряжением звезда, треугольник и треугольник.Эти типы переподключений не следует путать с переподключением многоскоростных многофазных асинхронных двигателей. В случае многоскоростных двигателей повторное включение приводит к двигателю с другим числом магнитных полюсов и, следовательно, с другой синхронной скоростью на заданной частоте.
Конструкция и работа трехфазного асинхронного двигателя на судне
Популярность трехфазных асинхронных двигателей на борту судов объясняется их простой, прочной конструкцией и высокой надежностью в морской среде.Асинхронный двигатель может использоваться в различных приложениях с различными требованиями к скорости и нагрузке.
Трехфазный источник питания переменного тока судового генератора может быть подключен к асинхронному двигателю переменного тока через стартер или любое другое устройство, например автотрансформатор, для улучшения характеристик крутящего момента и тока.
Дополнительная литература: Почему на кораблях номинальные значения трансформаторов и генераторов указаны в кВА?
Асинхронные двигателииспользуются почти во всех системах машинного оборудования судна, таких как двигатель крана, гребной двигатель, двигатель вентилятора, двигатель насоса забортной воды и даже небольшой синхронный двигатель.
Что такое асинхронный двигатель?
Асинхронный двигатель или асинхронный двигатель — это двигатель переменного тока, в котором электрический ток в роторе, необходимый для создания крутящего момента, получается за счет электромагнитной индукции из магнитного поля обмотки статора.
Существует два основных типа асинхронных двигателей:
.1 . Однофазный асинхронный двигатель :
Однофазный асинхронный двигатель: Как следует из названия, этот тип двигателя поставляется с однофазным источником питания.Переменный ток проходит по основной обмотке двигателя. Тип используемого однофазного асинхронного двигателя зависит от схемы запуска, которую они используют в качестве вспомогательной, поскольку они не запускаются самостоятельно.
Тип используемого однофазного асинхронного двигателя зависит от схемы запуска, которую они используют в качестве вспомогательной, поскольку они не запускаются самостоятельно.
Однофазные асинхронные двигатели в основном используются в системах с низким энергопотреблением, некоторые из них упомянуты ниже:
2 . Трехфазный асинхронный двигатель:
Эти трехфазные двигатели снабжены трехфазным питанием переменного тока и широко используются на судах для более тяжелых нагрузок.Трехфазные асинхронные двигатели бывают двух типов: двигатели с короткозамкнутым ротором и с контактным кольцом.
Двигателис короткозамкнутым ротором широко используются на судах из-за своей прочной конструкции и простой конструкции, например, некоторые из них. их заявок:
- Подъемники
- Краны
- Вытяжные вентиляторы большой мощности
- Двигатель Вспомогательные насосы
- Двигатель вентилятора вентилятора двигателя
- Насосы для тяжелых нагрузок в машинном отделении — балласт, пожарная, пресная, морская вода и т.
 Д.
Д. - Двигатель лебедки
- Двигатель брашпиля
Дополнительная литература: Общий обзор центральной системы охлаждения на кораблях
Конструкция трехфазного асинхронного двигателя
Основной корпус асинхронного двигателя состоит из двух основных частей:
Статор
Статор состоит из ряда штамповок, в которых прорезаны различные пазы для размещения трехфазной цепи обмотки, подключенной к трехфазному источнику переменного тока.
Трехфазные обмотки расположены в пазах таким образом, что они создают вращающееся магнитное поле после подачи на них переменного тока.
Ссылки по теме: Как ремонтировать двигатели на кораблях?
Обычно обмотки держат на разных участках делительной окружности с 30% перекрытием друг друга.
Обмотки намотаны на определенное количество полюсов в зависимости от требуемой скорости, поскольку скорость обратно пропорциональна количеству полюсов, определяемому формулой:
Н с = 120f / p
Где N с = синхронная скорость
f = частота
р = нет. полюсов
полюсов
Ротор
Ротор состоит из многослойного цилиндрического сердечника с параллельными прорезями, на которых установлены токопроводящие шины.
Проводники представляют собой тяжелые медные или алюминиевые шины, которые подходят к каждому гнезду. Эти жилы припаиваются к замыкающим концевым кольцам.
Ротор трехфазного асинхронного двигателя
Прорези не совсем параллельны оси вала, а немного перекошены по следующим причинам:
- Они уменьшают магнитный гул или шум
- Они предотвращают остановку двигателя
Принцип работы трехфазного асинхронного двигателя
Когда на двигатель подается трехфазное питание, результирующий ток создает магнитный поток «Ø».
Благодаря последовательности переключения трехфазного тока в R, Y и B, генерируемый магнитный поток вращается вокруг проводника ротора.
Согласно закону Фарадея, который гласит, что «ЭДС, индуцированная в любой замкнутой цепи, обусловлена скоростью изменения магнитного потока в цепи», ЭДС индуцируется в медном стержне, и благодаря этому ток течет в роторе. .
Направление ротора может быть задано законом Ленца, который гласит: «Направление индуцированного тока будет противоположным движению, вызывающему его.”
Здесь относительная скорость между вращающимся потоком и неподвижным проводником ротора является причиной генерации тока; следовательно, ротор будет вращаться в том же направлении, чтобы уменьшить причину, то есть относительную скорость, таким образом вращая ротор асинхронного двигателя.
Преимущества асинхронного двигателя
Конструкция двигателя и способ подачи электроэнергии дают асинхронному двигателю несколько преимуществ, таких как:
— Они прочные и простые по конструкции с очень небольшим количеством движущихся частей
— Они могут эффективно работать в суровых и суровых условиях, например, на морских судах
— Стоимость обслуживания трехфазного асинхронного двигателя меньше, и в отличие от двигателя постоянного тока или синхронного двигателя, они не имеют таких деталей, как щетки, контактные кольца и т. Д.
— Асинхронный двигатель может работать во внутренней среде, поскольку у него нет щеток, которые могут вызвать искру и могут быть опасны для такой атмосферы
Ссылки по теме: 20 опасностей нефтяных танкеров, которые должен знать каждый моряк
— 3-фазный асинхронный двигатель не нуждается в каком-либо дополнительном пусковом механизме или устройстве, поскольку они могут генерировать самозапускающийся момент, когда к ним подается трехфазный переменный ток, в отличие от синхронных двигателей. Однако однофазный асинхронный двигатель нуждается в некотором вспомогательном устройстве для пускового момента
.— Конечная мощность трехфазного двигателя почти равна 1.В 5 раз больше, чем у однофазного двигателя того же размера.
Недостатки трехфазного асинхронного двигателя:
— Во время запуска он потребляет высокий начальный пусковой ток при подключении к тяжелой нагрузке. Это вызывает падение напряжения во время запуска машины. Чтобы избежать этой проблемы, к трехфазному электродвигателю подключены методы плавного пуска.
Дополнительная литература: Панель пускателя двигателя на корабле: техническое обслуживание и процедуры
— Асинхронный двигатель работает с запаздывающим коэффициентом мощности, что приводит к увеличению потерь I2R и снижению эффективности, особенно при низкой нагрузке.Для корректировки и улучшения коэффициента мощности с этим типом двигателя переменного тока можно использовать батареи статических конденсаторов.
— Регулирование скорости трехфазного асинхронного двигателя затруднено по сравнению с двигателями постоянного тока. Частотно-регулируемый привод может быть интегрирован с асинхронным двигателем для регулирования скорости.
Проблемы в трехфазном асинхронном двигателе:
Как и любое другое оборудование, трехфазный асинхронный двигатель может сталкиваться с различными типами проблем, которые можно в целом классифицировать как:
A) Неисправности, связанные с окружающей средой: Суровые морские условия могут сказаться на оборудовании судна на ранней стадии, если оно не обслуживается должным образом.Температура окружающей среды и содержание влаги в воздухе в море влияют на рабочие характеристики асинхронного двигателя.
Двигатели устанавливаются на другое крупное оборудование (главный двигатель), имеющее собственную частоту вибрации, которая влияет на детали двигателя.
Неправильная установка или неплотное основание двигателя или нагрузки, к которой он подключен, также может привести к снижению КПД двигателя и, при более длительной работе, к выходу двигателя из строя.
B) Неисправности, связанные с электричеством: Проблема возникает в двигателе из-за неисправностей электропитания, таких как несбалансированная подача тока или линейного напряжения, замыкание на землю в системе, проблема однофазности, короткое замыкание и т. Д.Различные типы электрических неисправностей:
Неисправность обмотки: Обмотка статора может выйти из строя из-за проблемы с изоляцией, вызвавшей короткое замыкание.
Дополнительная литература: Важность сопротивления изоляции в морских электрических системах
Однофазный отказ: Когда одна или более чем одна фаза трехфазного источника питания потеряна, работающий трехфазный двигатель будет продолжать работать, но с повышенными параметрами температуры и потерь.Это состояние известно как однофазное.
Медленное движение: Это сочетание электрической и механической неисправности, при которой асинхронный двигатель работает на более низкой скорости (почти 1/7 своей синхронной скорости) даже при полной нагрузке. Это результат аномальной магнитодвижущей силы или высокого содержания гармоник в источнике питания двигателя.
C) Неисправности, связанные с механикой: Двигатель состоит из нескольких механических частей, и их совмещение друг с другом и с нагрузкой играет важную роль в эффективности двигателя.Вот некоторые из наиболее заметных механических неисправностей двигателя:
- Дисбаланс Ротор: Ротор — единственная движущаяся часть в трехфазном асинхронном двигателе. Если существует дисбаланс между осью вращения вала и осью распределения веса ротора, это вызовет вибрацию, дополнительное тепло и потерю эффективности в системе.
Дисбаланс может быть вызван дефектом ротора, внутренним перекосом, изгибом вала, неравномерной нагрузкой и проблемами в двигателе и силовой муфте.
Дополнительная литература: 10 вещей, которые следует учитывать при сборке судового оборудования после технического обслуживания
- Усталостный отказ: Если график технического обслуживания не соответствует требованиям или детали, используемые в двигателе, имеют низкое качество, ослабление материала может привести к усталостному разрушению, которое обычно вызывается многократно применяемыми нагрузками.
- Неисправность подшипника: Двигатель оснащен двумя подшипниками на каждом конце ротора для поддержки и свободного вращения вала.Подшипник может выйти из строя, если не проводить своевременное техническое обслуживание или из-за перегрузки, неправильной установки, загрязненного смазочного масла и работы при чрезмерной температуре.
Дополнительная литература: Как проверить смазочное масло на борту судов?
- Коррозия: Двигатель, установленный на судне, находится в очень агрессивной среде. Поскольку двигатель состоит из нескольких механических частей, таких как ротор, подшипник и т. Д., Влага, присутствующая в атмосфере, или вода, содержащаяся в смазке (консистентной смазке), разъедают подшипники, вал двигателя и роторы.Изоляция также может подвергнуться коррозии и привести к короткому замыканию между обмотками
- Проблема со смазкой: Отсутствие смазки или загрязнение смазочного материала может привести к увеличению трения между деталями, а подшипники могут быстро изнашиваться.
Дополнительная литература: 8 способов оптимизации использования смазочного масла на судах
Защита для трехфазного асинхронного двигателя
Однофазная защита: Для решения этой проблемы используются защитные устройства для трехфазного асинхронного двигателя.Все двигатели мощностью более 500 кВт должны быть оснащены защитными устройствами или оборудованием для предотвращения любого повреждения из-за однофазного включения. Подробности об этих устройствах можно найти здесь.
Перегрев: Обмотка двигателя может нагреваться из-за таких проблем, как перегрузка или однофазность. Предохранители, реле и т. Д. Используются для защиты двигателя от перегрева
Дополнительная литература: Техническое обслуживание электрического реле в судовой электрической системе
Плавный запуск: Как описано выше, одним из недостатков трехфазного асинхронного двигателя является большой ток, который он потребляет во время периода пуска.Чтобы защитить его от этой проблемы, используются различные методы пуска, объединяющие двигатель с устройством плавного пуска, DOL, пускателем со звезды на треугольник, автотрансформатором и т. Д.
Дополнительная литература: 10 способов достижения энергоэффективности в судовой электрической системе
За счет использования устройства плавного пуска для асинхронного двигателя механические и электрические нагрузки снижаются, обеспечивая защиту двигателя во время пуска.
Возможно, вы также прочитаете:
Отказ от ответственности: Вышеупомянутые взгляды принадлежат только автору.Данные и диаграммы, если они используются, в статье были получены из доступной информации и не были подтверждены каким-либо установленным законом органом. Автор и компания «Марин Инсайт» не утверждают, что они точны, и не принимают на себя никакой ответственности за них. Взгляды представляют собой только мнения и не представляют собой каких-либо руководящих принципов или рекомендаций относительно какого-либо курса действий, которым должен следовать читатель.
Статья или изображения не могут быть воспроизведены, скопированы, переданы или использованы в любой форме без разрешения автора и Marine Insight.
li {float: left; width: 48%; min-width: 200px; list-style: none; margin: 0 3% 3% 0 ;; padding: 0; overflow: hidden;} # marin-grid-81401> li .last {margin-right: 0;} # marin-grid-81401> li.