Контроллеры бесколлекторных двигателей Сервосила
Контроллеры бесколлекторных двигателей
Контроллеры СЕРВОСИЛА — это встраиваемые блоки управления для сервоприводов и тяговых электроприводов. Контроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод.
Контроллеры предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ или к бортовым системам управления контроллеры предоставляют интерфейсы управления CAN и USB 2.0
Компания Сервосила изначально разработала данные контроллеры для применения в своих собственных продуктах — руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях.
Контроллеры бесколлекторных двигателей поставляются в двух исполнениях — плата прямоугольной формы (модель SC-25R) и плата круглой формы (модель SC-25C). Данные модели совершенно идентичны по интерфейсам и возможностям и отличаются только формой плат. Максимальный ток фазы двигателя — 25А.
Основными областями применения данных контроллеров бесколлекторных двигателей являются:
- сервомеханизмы, сервоприводы,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.

- Бесколлекторные (PMSM и BLDC), в том числе Maxon, Dunker и других.
- Бездатчиковые и с датчиками Холла (Sensorless и Sensored).
- Со встроенными энкодерами и с внешними энкодерами.
- Коллекторные (до 2шт одновременно) и соленоиды.
- Квадратурный интерфейс с индекс-сигналом,
- BISS-C интерфейс (в том числе к магнитным датчикам фирмы RLS),
- SSI интерфейс,
- ШИМ интерфейс,
- SPI интерфейс.
Датчики абсолютного положения вала («энкодеры») применяются в различных режимах сервоуправления, а также для поддержания плавного движения вала на низких скоростях вращения.
Если энкодер в приводе присутствует, то контроллеры используют его, когда это имеет смысл. Если энкодер не подключен, то контроллеры могут работать и без него, но, возможно, в упрощенном режиме работы.
Подключение двигателей, датчиков положения вала, датчиков Холла и управляющих шин CANbus и USB 2.0 производится:- либо через штатные разъемы на платах контроллеров,
- либо посредством припайки кабелей в специально предусмотренные отверстия на платах, чем обеспечивается виброустойчивость соединений.
Конструктивно разъемы для подключения кабелей расположены только с одной из сторон плат; тыльная сторона плат не имеет разъемов и предназначена для подключения теплоотводного радиатора или для монтажа платы напрямую на корпус электропривода, использующегося для отвода тепла от платы.
Контроллеры не имеют разъемов, выходящих «в сторону»; все разъемы имеют только ориентацию «вверх». Это сделано для облегчения интеграции контроллеров внутрь корпусов устройств, таких как сервоприводы цилиндрической формы, или в отсеки электрооборудования небольших габаритов.
Предусмотрен механизм для обновления прошивки плат через порт RS232.
Режимы управления
В контроллерах реализованы следующие режимы управления бесколлекторными двигателями:- Стабилизация выходного момента на валу (ETC: Electronic Torque Control). Применяется для точного управления силой, с которой электропривод воздействует на нагрузку, например, в испытательных стендах, АСУ ТП или в шагающих роботах.
- Стабилизация скорости вращения вала (ESC: Electronic Speed Control). Применяется для поддержания заданной скорости вращения двигателя, вне зависимости от меняющейся внешней нагрузки, например, в тяговых электроприводах конвейеров, насосов или в шасси мобильных роботов.
 Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной.
Контроллер автоматически увеличивает или уменьшает момент на валу для того, чтоб поддерживать скорость вращения вала постоянной. - Direct Drive — точное управление положением вала посредством прямого позиционирования магнитного поля статора электродвигателя, в том числе при отсутствии редуктора в электроприводе. Применяется в системах компьютерного зрения, станках с ЧПУ, линейных двигателях, — везде где требуется максимальная точность управления положением без редукторов.
 В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности.
В этом режиме электропривод на бесколлекторном двигателе может заменить шаговые двигатели при значительном улучшении точности. - Тормоз вала («блокировка вращения»), — блокировка вращения вала вне зависимости от воздействия внешних нагрузок, например, для фиксации остановленного конвейера или для торможения колес мобильного шасси, стоящего «на горке». Блокировка происходит только работой бесколлекторного двигателя без применения каких-либо дополнительных тормозных устройств. Для блокировки вала применяется метод, минимизируещий потребление электрической энергии.
- Рекуперация энергии в батарею. Если контроллер питается от батареи, то он способен «пропускать» ток обратно в батарею тогда, когда электродвигатель работает в режиме электрогенератора, например, при торможении мобильного шасси. При этом возможно программное управление силой тока, идущего в батарею. Этот режим также применяется в системах «стартер-генератор» в сочетании с двигателями внутреннего сгорания (ДВС), в которых после запуска ДВС электродвигатель переходит в режим электрогенератора.

- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.
Возможность управлять коллекторными двигателями и соленоидами посредством силовой ШИМ — это вспомогательная функция данных контроллеров, спроектированых прежде всего для управления бесколлекторными двигателями.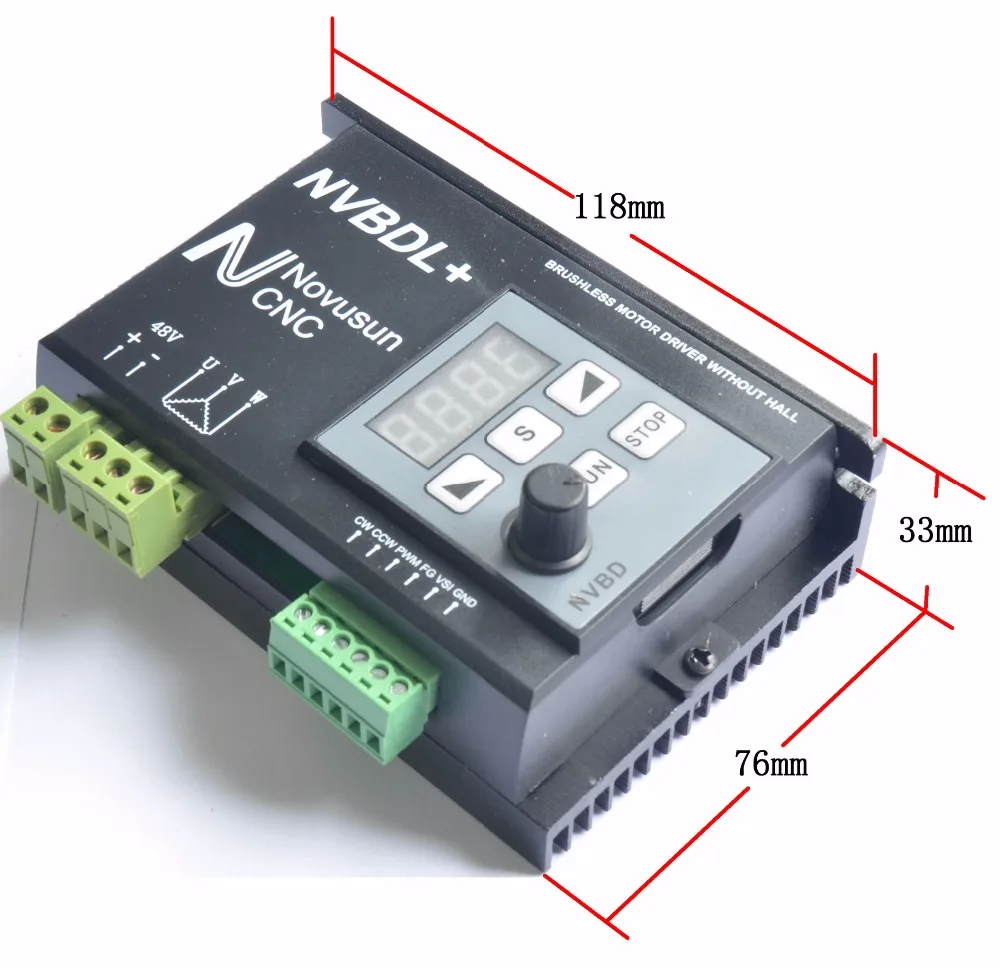 Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Для коллекторных двигателей (в отличие от бесколлекторных) реализовано только управление без обратной связи (open loop). При этом при желании можно управлять двумя коллекторными двигателями одновременно (и даже тремя коллекторными двигателями при определенных ограничениях). Также с помощью данных контроллеров можно управлять соленоидами.
Автонастройка
Интерфейсы программного управления
Предусмотрены следующие интерфейсы для интеграции с управляющими компьютерами или бортовыми системами управления:- Шина CAN с протоколом верхнего уровня CANopen.
 Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы.
Контроллеры имеют два порта CANbus для облегчения построения «гирлянды» из контроллеров. До 126 контроллеров СЕРВОСИЛА могут быть подключены к единой шине CANbus. Это применяется для построения АСУ, управляющих множеством электроприводов одновременно, или в робототехнических системах с большим числом степеней свободы. - Порт USB 2.0, который автоматически инициализируется, как виртуальный COM-порт в Windows 10, 8 и в Linux. Установка специальных драйверов не требуется ни в Windows, ни в Linux. Порт USB 2.0 у контроллеров СЕРВОСИЛА удобен тем, что позволяет управлять электродвигателями с помощью обычных персональных компьютеров или их промышленных вариантов, например, на испытательных стендах или автоматизированных системах контроля качества. Контроллеры СЕРВОСИЛА способны выполнять функцию USB-в-CAN шлюза («переходника USB2CAN») для обеспечения доступа управляющих компьютеров к сети CAN. Этот «переходник» работает как в Windows 10, 8, так и в Linux.
К Windows 10/8/7 контроллеры СЕРВОСИЛА подключаются через интерфейс USB 2.0, который автоматически определяется, как виртуальный COM-порт. Управляющие пользовательские программы, работающие под Windows, могут посылать текстовые команды в контроллер СЕРВОСИЛА через этот виртуальный COM-порт, а также получать обратно телеметрию в текстовом виде. Обмен данными происходит через стандартный текстовый протокол SLCAN.
Подключенный по USB 2.0 контроллер также выполняет роль USB-to-CAN шлюза и позволяет обеспечить доступ управляющих компьютеров с ОС Windows или ОС Linux ко всей сети CANbus. Таким образом, через единый интерфейс USB 2.0 к компьютеру с ОС Windows или Linux можно подключить «гирлянду» контроллеров СЕРВОСИЛА для управления целым комплексом электроприводов, например, в составе испытательного стенда, АСУ ТП или мобильного робота, а также любые другие устройства, поддерживающие шину CANbus, например, инерциальные датчики или GPS приемник.
К ОС Linux контроллеры СЕРВОСИЛА подключаются либо по интерфейсу CAN, либо по интерфейсу USB 2.0. В случае подключения по CANbus управляющие пользовательские программы могут использовать стандартный Linux SocketCAN API для посылки команд в контроллеры СЕРВОСИЛА и для получения телеметрии в обратном направлении. В сети Интернет можно найти примеры исходного кода множества программ, работающих через SocketCAN API.
Если же контроллер СЕРВОСИЛА подключен к Linux через интерфейс USB 2.0 (а не через CANbus), то контроллер идентифицируется в Linux, как виртуальный COM-порт, также, как и в ОС Windows. В этом случае управляющие пользовательские программы могут использовать либо стандартный Linux SocketCAN API через встроенный в Linux драйвер SLCANd, либо же работать с виртуальным COM-портом напрямую с использованием стандартного текстового протокола команд SLCAN.
При подключении через USB 2. 0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
0 к ОС Linux контроллер также может выполнять функцию USB-to-CAN шлюза и обеспечить доступ ОС Linux ко всей сети CANbus. Эта функция полезна в случае, если управляющая компьютерная система с ОС Linux не имеет своего собственного физического CANbus порта. В этом случае контроллеры СЕРВОСИЛА могут играть вспомогательную роль интерфейсного адаптера USB-в-CANbus.
Для разработки программ, управляющих контроллерами СЕРВОСИЛА через CAN или USB 2.0, в общем случае не требуются какие-либо специализированные библиотеки, SDK или средства разработки кроме тех, которые уже имеются в стандартных ОС Linux и Windows. Разрабатывать программы можно на языках C/C++, Java, Python, MATLAB, или любых других, которые могут работать с виртуальными COM-портами, со стандартным SocketCAN API в Linux, или же программных пакетов или ПЛК, которые уже имеют встроенную поддержку CANopen, например, LabView.
Программное обеспечение «Сервоскоп»
В комплект поставки входит программное обеспечение «Сервоскоп», которое автоматизирует процесс настройки контроллеров под конкретный электродвигатель и позволяет строить графики и получать отладочную телеметрию с электроприводов по сети CANbus или USB 2. 0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
0. Данное графическое программное обеспечение работает как под ОС Windows 10/8, так и под ОС Linux, в том числе, на популярных дистрибутивах Debian и Ubuntu. Установка драйверов не требуется.
Симулятор электроприводов
Для упрощения отладки пользовательского управляющего программного обеспечения в комплект поставки входит программный симулятор контроллера СЕРВОСИЛА. Программный симулятор распространяется бесплатно в составе программного обеспечения «Сервоскоп». Этот симулятор полностью воспроизводит управляющий интерфейс CANbus/CANopen контроллеров СЕРВОСИЛА и позволяет отлаживать пользовательское программное обеспечение управления электроприводом без риска повредить реальный электродвигатель или редуктор электропривода.
Технические характеристики
| Параметр | Значение |
|---|---|
| Поддерживаемые типы двигателей | Бесколлекторые (brushless): PMSM, BLDC.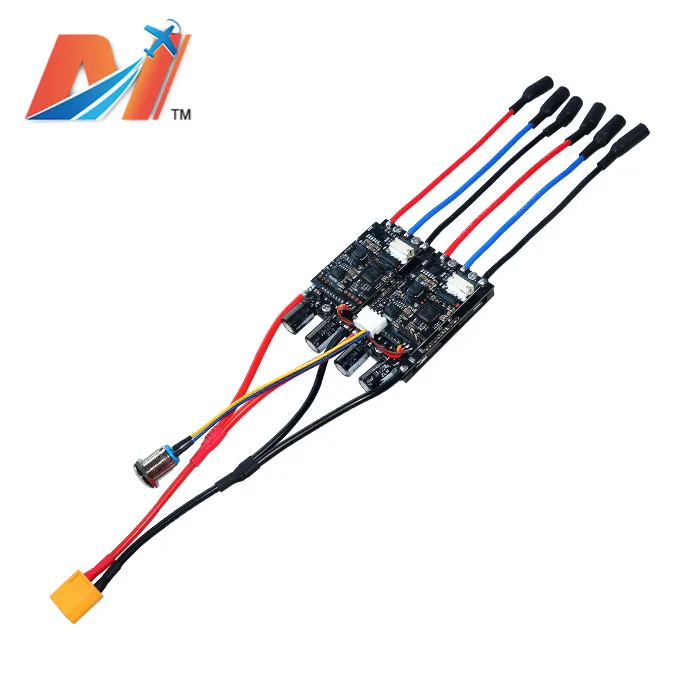 Коллекторные (brushed): только open loop режим. Соленоиды: только open loop режим. |
| Максимальный ток через фазу двигателя | 25 А (желательно с радиатором) |
| Номинальный (рекомендуемый) ток через фазу двигателя | 15 А (желательно с радиатором, но обычно не требуется) 12 А (без радиатора) |
| Входное напряжение питания | 7-60 V DC |
| Режимы управления бесколлекторными двигателями | Стабилизация момента на валу. Стабилизация скорости (ESC). Сервоуправление. Прямое управление (Direct Drive). Тормоз вала. Рекуперация (электрогенератор). Системная идентификция (автонастройка). |
| Встроенные алгоритмы управления бесколлекторными двигателями | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, D-Q axis Coupling Compensation, Field Weakening, Защиты, Управление динамикой разгона-торможения.  |
| Функция автонастройки под электродвигатель | Есть |
| Интерфейсы к датчикам положения вала (энкодерам) | Квадратурный с индексным сигналом, BISS/C, SSI, ШИМ, SPI |
| Максимальное разрешение датчика положения вала | 20 бит |
| Встроенный шлюз сетей управления | USB-to-CANbus шлюз Поддерживаются 11-битные и 29-битные идентификаторы шины CANbus. |
| Управляющие интерфейсы | Шина CAN: протокол CANopen с 11-битными идентификаторами. USB 2.0: виртуальный COM-порт с текстовым протоколом SLCAN. |
| Количество последовательно подключенных контроллеров («гирлянда») в единой цепочке управления и питания: | До 127 шт через шину CANbus. До 16 шт через встроенный USB-to-CANbus шлюз. |
| Терминальное сопротивление 120 Ом для шины CANbus | Есть. Включается-выключается посредством джампера. Включается-выключается посредством джампера. |
| Возможные варианты скорости передачи данных по шине CAN | 1 мбит/сек 500 кбит/сек 250 кбит/сек 125 кбит/сек 100 кбит/сек 50 кбит/сек |
| Количество CANbus портов | 2 шт (параллельные) |
| Количество USB 2.0 портов | 1 шт |
| Поддерживаемые операционные системы | Windows 10, 8 (драйвер не требуется) Linux (драйвер не требуется): Debian, Ubuntu, Astra Linux, Raspberry PI OS и другие. |
| Интерфейсы и API для программного управления | Linux SocketCAN API, CANopen, Текстовый протокол SLCAN через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux. |
| Программный симулятор программного интерфейса CANbus контроллера для отладки управляющего программного обеспечения без двигателя | Есть |
| Габариты модели SC-25R (прямоугольной формы) | 68мм x 40мм x 16мм |
| Габариты модели SC-25С (круглой формы) | Диаметр 62 мм, высота 16 мм |
| Масса | ~50 гр (без радиатора) |
| Энергопотребление в режиме ожидания при неработающем двигателе | 120-180 мА |
Регуляторы хода для бесколлекторных моторов
Автор — Сергей Потупчик (serj)Вступление
Данная статья посвящена практическим аспектам применения регуляторов хода (далее — контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации.
Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса — с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода.
Большинство применяемых в моделизме бесколлекторных моторов построены по принципу «вывернутого наизнанку» коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три.
Среди бесколлекторных моторов для моделизма можно выделить две основные группы — с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора — они могут «напрямую» крутить винты большого диаметра.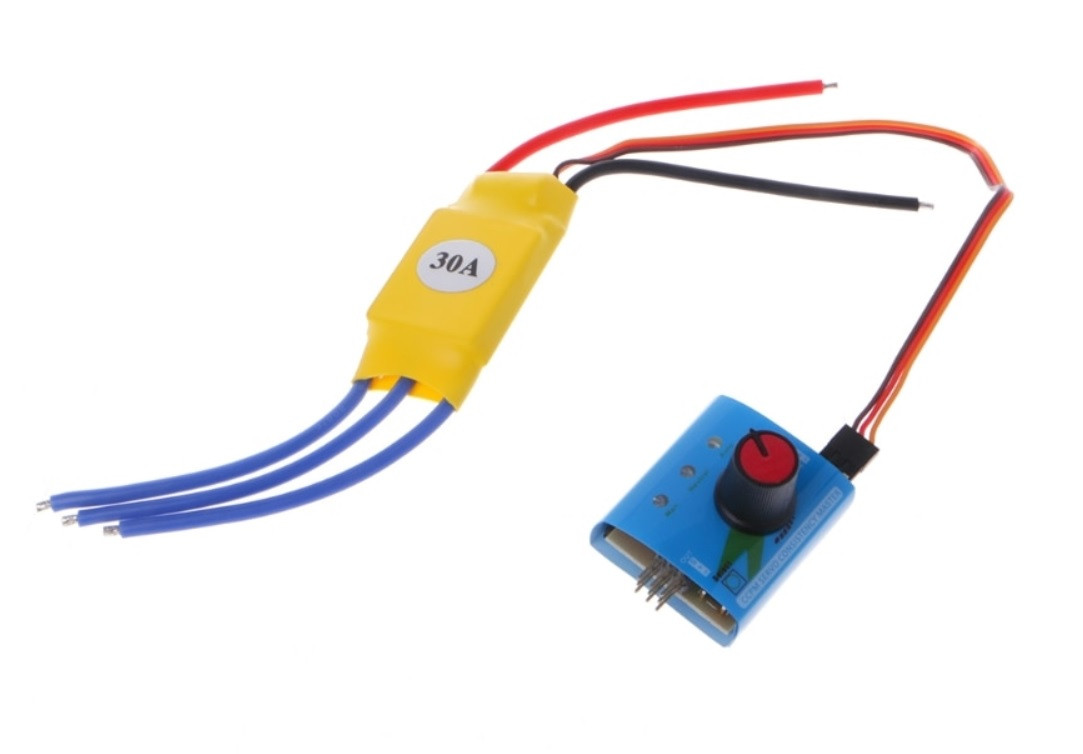
Основные характеристики контроллеров
Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину «кратковременного» тока, допустимого в течении нескольких секунд.
«Кратковременный» ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии.
Максимальное рабочее напряжение — указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС — при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера.
Максимальные обороты (maximum rpm) — программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много… Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока — мотор начинает резко дергаться.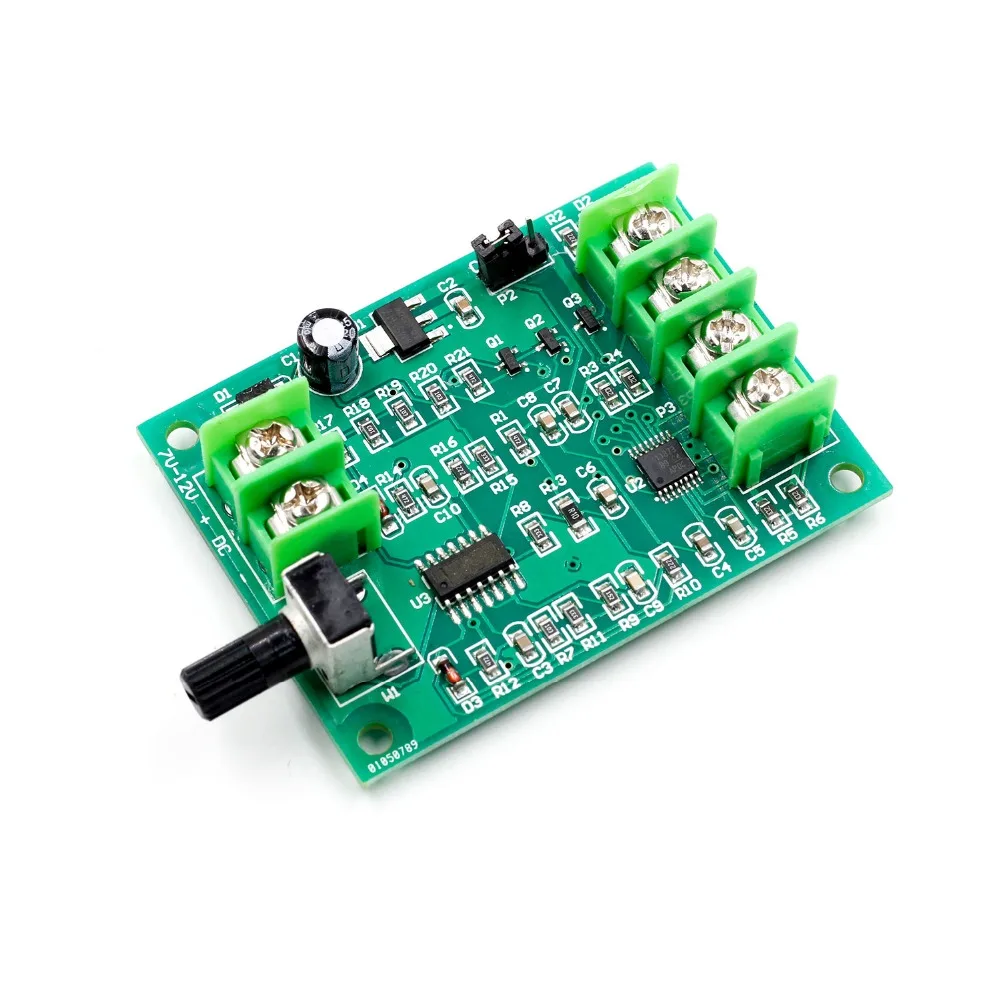 Этот эффект не является признаком неисправности мотора ли контроллера.
Этот эффект не является признаком неисправности мотора ли контроллера.
Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода.
Частота импульсов контроллера (PWM Frequency) — как правило, составляет 7-8 Кгц. У «продвинутых» контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения.
Особенности подключения
Провода — не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов.
Есть несколько важных аспектов.
Самое главное — нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные.
При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и «повисает» процессор контроллера). Известно несколько случаев полного «выгорания в дым» контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см.
Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора — контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки.
Настройки
Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют.
Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически.
Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения — плавный (soft cut-off) и жесткий (hard cut-off).
При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего.
При жестком — мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора.
Тормоз (brake) – торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии «Advanced» тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот… Намудрили чехи, однако.
Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% — это важно для соревнований, где счет идет именно на эти проценты.
Для многополюсных моторов с внешним ротором ситуация иная — для них оптимальным по КПД и мощности является опережение 25-30°.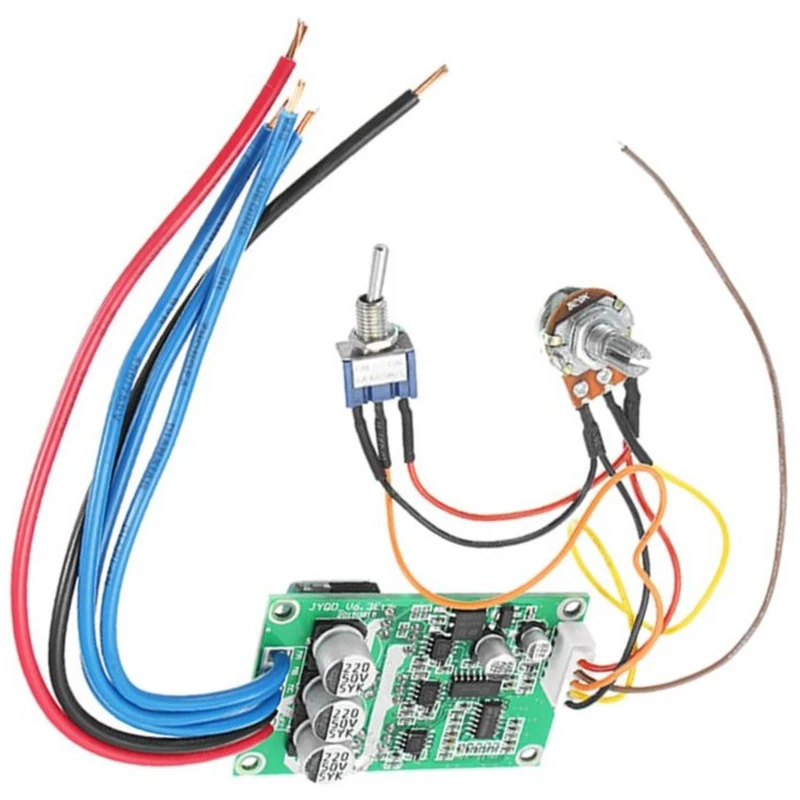 При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик — около 3%. Как говорится — в полете не заметно, но осознавать приятно…
Режим старта (start mode) — не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается.
Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа.
Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами.
Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) — когда характеристика задана производителем.
Также в некоторых контроллерах присутствует режим «гувернер» (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель.
Реверс (reverse) — смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно.
В некоторых контроллерах, например в Kontronik серии «Beat», нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом!
Программирование
Тут совет один — читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника — просто и гораздо удобней, чем считать вспышки светодиода или писки мотора. ..
..
Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца — все параметры записываются в конце цикла программирования, а у других — например Castle Creations — программирование можно закончить в любой момент.
Возможные проблемы
Как показывает практика — 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается — большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче.
Далее — попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима — опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет…
Старые «золотые» Jeti серия Jes 18, отличаются, например одной особенностью — у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало — мотор остановился…
Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом «одумывается», и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации — опять же использование плавного старта.
О выключателях
Наличие выключателя в контроллере — это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight.
Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight.
Про «выключатель» у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен.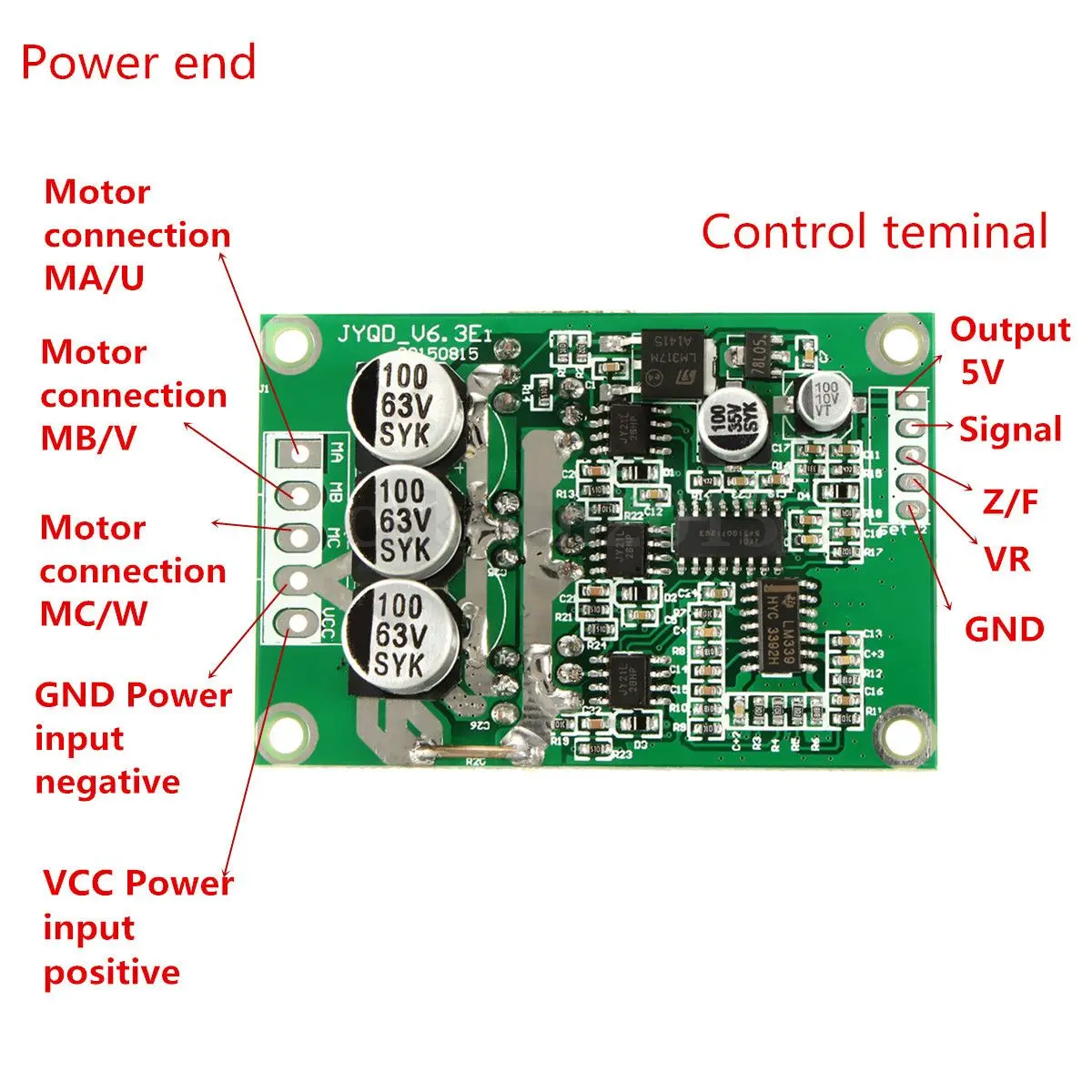 И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
И не подает никаких сигналов об этом постепенно разряжая «в ноль» батарею, что для литиевых аккумуляторов заканчивается фатально.
Производители контроллеров
Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры.
Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж.
Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik.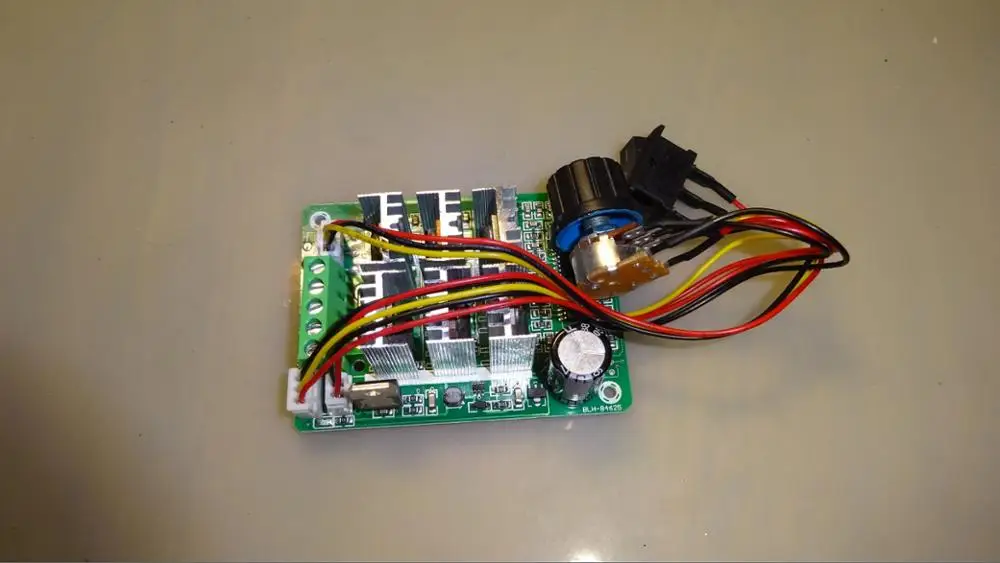
Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби.
Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично…
При выборе контроллера главный совет — внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы — контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше.
Заключение
Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления… Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня…
Обсудить на форумеКонтроллер бесколлекторного двигателя BLD-20DIN.
Контроллер BLD‑20DIN – это обновленный блок управления трехфазными бесколлекторными двигателями с
датчиками Холла.
Номинальный ток двигателя, поддерживаемый блоком – 20А, максимальный до 80А. Это позволяет использовать
контроллер с
большинством современных и распространенных в промышленности двигателей.
Это позволяет использовать
контроллер с
большинством современных и распространенных в промышленности двигателей.
В новом контроллере предусмотрено задание ограничения потребляемой мощности, что обеспечивает защиту оборудования от поломки.
В конструкцию блока включен встроенный тормозной резистор 10 Вт 11 Ом для гашения рекуперативной энергии при длительном торможении и работе с высокоинерционными нагрузками.
Для регулирования скорости бесколлекторного двигателя предусмотрены встроенный потенциометр и контакты
для подключения
внешнего потенциометра или аналогового сигнала 0..5 В. Также имеется потенциометр для регулирования
времени разгона и
торможения двигателя.![]()
Дополнительные сигналы для старта и остановки, смены направления и экстренной остановки (чистый контакт) позволяют подключать внешние кнопки и датчики для управления контролером.
Особенности устройства:
- Плавное ускорение и торможение двигателя задается пользователем при помощи подстроечного резистора.
- Аналоговое регулирование скорости осуществляется встроенным или внешним потенциометром, либо аналоговым сигналом 0..5В.
- Для запуска и остановки двигателя предусмотрена кнопка START/STOP и дублирующий вход для подключения внешнего сигнала.
- Для изменения направления вращения двигателя предназначена кнопка DIR и дублирующий вход для
подключения внешнего
сигнала.

- Предусмотрен вход для подключения внешнего сигнала аварийной остановки.
- Ограничение потребляемой мощности задается пользователем при помощи подстроечного резистора.
- Обработка внешних сигналов START/STOP и DIR может выполняться по уровню или по фронту сигнала. Логика работы выбирается и настраивается пользователем самостоятельно.
- Блок имеет встроенный тормозной резистор (10 Вт, 11 Ом) для поглощения генерируемой двигателем энергии (выбег, принудительное вращение).
Условия эксплуатации блока:
- температура окружающего воздуха – (-25…+50)ºС
- относительная влажность воздуха до 90%
- атмосферное давление (650…800)мм. рт. ст.
Управление скоростью:
- внешний потенциометр
- встроенный потенциометр
- аналоговый сигнал 0.
 .5В
.5В
Управление направлением:
- внешний сигнал DIR
- кнопка реверса
| |||||
| |||||
| |||||
| |||||
| |||||
Компания «Сервосила» начала выпуск новой линейки контроллеров для бесколлекторных двигателей
Компания СЕРВОСИЛА обновила линейку своих миниатюрных встраиваемых контроллеров бесколлекторных двигателей.
Компания Сервосила изначально разработала данные сервоконтроллеры для применения в своих собственных продуктах — мобильных роботах, руках-манипуляторах и сервоприводах. Технология этих контроллеров прошла несколько итераций разработки и совершенствования и включила в себя значительный опыт, накопленный компанией в процессе эксплуатации своих роботов в различных, зачастую экстремальных, условиях. С тех пор контроллеры СЕРВОСИЛА нашли широкое применение в самых различных отраслях промышленности и науки, — везде, где требуется компьютерное управление бесколлекторными двигателями.
Данные сервоконтроллеры превращают любой бесколлекторный электродвигатель в сервопривод или в интеллектуальный тяговый электропривод. Основными областями применения контроллеров бесколлекторных двигателей Сервосила являются:
- сервомеханизмы, сервоприводы, в том числе для траекторного управления,
- тяговые электроприводы,
- АСУ ТП, промышленные линии, конвейеры, насосы,
- робототехнические устройства,
- интеллектуальное торговое оборудование,
- автоматизированное складское оборудование,
- испытательные стенды с компьютерным управлением,
- системы измерения и автоматической диагностики,
- тяговые электроприводы различных мобильных шасси,
- станки с ЧПУ,
- системы компьютерного зрения.
Контроллеры (англ. brushless motor controllers) предназначены для управления бесколлекторными двигателями (PMSM, BLDC) любых производителей в сочетании с различными энкодерами абсолютного положения вала (BISS-C, SSI, SPI, ШИМ, квадратурный) или без них. Для подключения к управляющим компьютерам АСУ, PLC или к бортовым системам управления контроллеры предоставляют интерфейсы управления CANbus/CANopen и USB 2.0.
Сопутствующее программное обеспечение работает с любыми операционными системами, поддерживающими интерфейсы CANbus или USB такими, как Windows, Linux, включая отечественную Astra Linux, и Raspberry PI OS.
Для облегчения настройки контроллера под выбранный электродвигатель предусмотрен режим автонастройки, в котором автоматически определяются основные характеристики бесколлекторного электродвигателя и вычисляются оптимальные настройки законов управления. Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам.
Эта функция значительно упрощает интеграцию контроллера с новыми бесколлекторными двигателями, если даже характеристики двигателя точно не известны по каким-либо причинам.
В модулях управления бесколлекторными двигателями СЕРВОСИЛА реализованы современные алгоритмы управления:
- Field Oriented Control (FOC),
- с Back-EMF Observer и Hall Sensors Observer,
- с функцией Q-D axis coupling compensation для гладкости хода,
- с опциональным field weakening для достижения максимальных скоростей вращения,
- с интеллектуальными алгоритмами защиты
- и управления динамикой электродвигателя,
- и автоматическим определением характеристик двигателя и привода.
Реализованный набор алгоритмов обеспечивает динамическую устойчивость и малошумность работы электродвигателя, а также достижение максимального момента или максимальной скорости вращения вала (в зависимости от задачи) при оптимизации энергопотребления и обеспечении защиты электродвигателя от перегрева, а редуктора от поломки.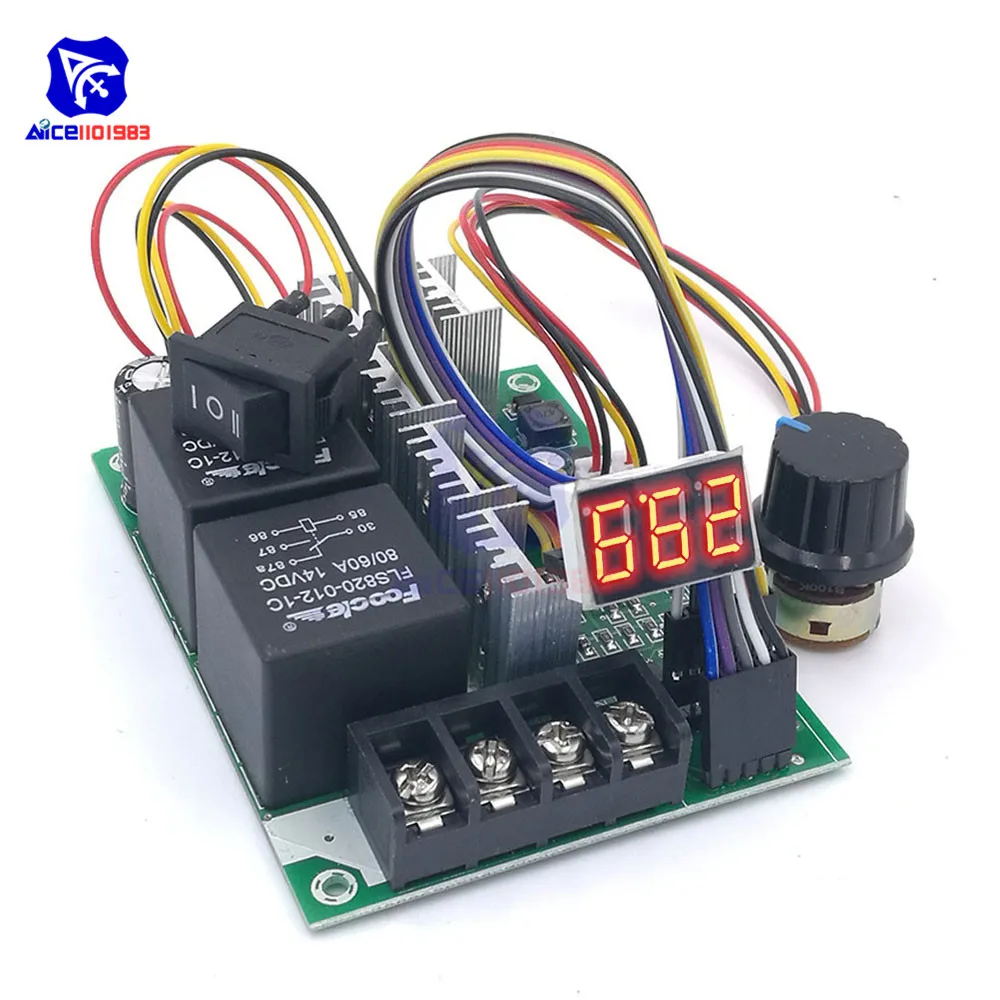
Контроллеры бесколлекторных двигателей Сервосила производятся в России.
Данный материал является частной записью члена сообщества Club.CNews.
Редакция CNews не несет ответственности за его содержание.
Часть 2. Элементы квадрокоптера | CUSTOMELECTRONICS.RU
В этой части цикла мы постараемся максимально подробно описать, как выбрать детали для постройки будущей винтокрылой машины.
1. Полетный контроллер
Полетный контроллер самая важная часть. Если вы новичок в строительстве коптеров, то очень желательно купить хороший полетный контроллер. Стабильность полета и управляемость на девяносто процентов зависит от способностей полетного контроллера.
Не менее важно то, как настраивается полетный контроллер.
Широко распространены полетные контроллеры семейства MultiWii. Они достаточно дешевые и дают приемлемое качество работы, но настраивать их крайне неудобно.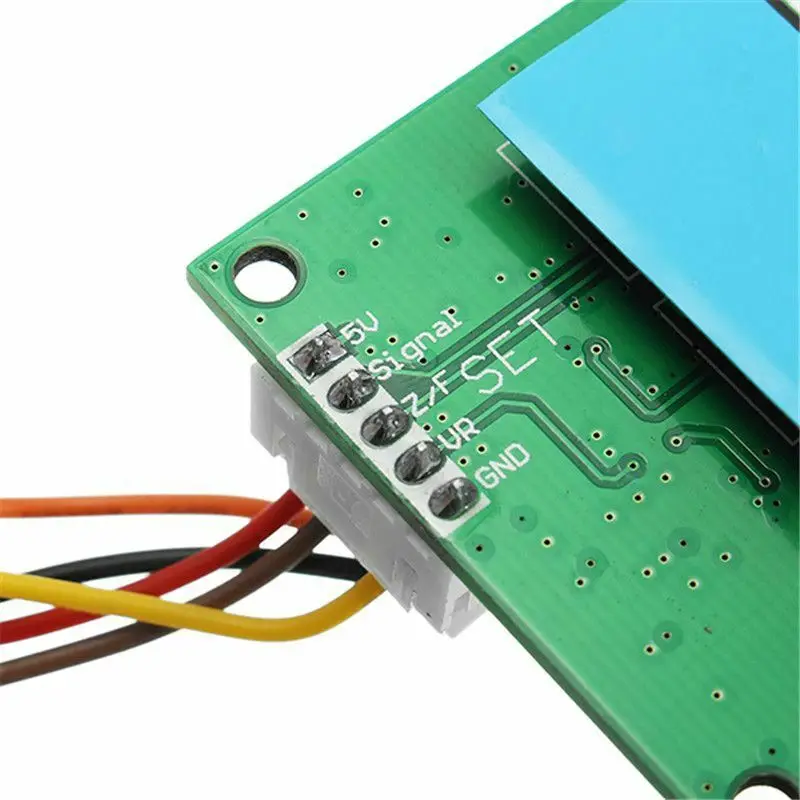 Они совместимы с Arduino и для того, чтобы установить свои настройки вам необходимо будет скачать готовый проект, поправить в нем константы, раскомментировать или закомментировать определенные части кода и залить прошивку на плату. Во время всех этим манипуляций очень велик шанс ошибиться, но если вы не готовы тратится, то вполне можно использовать полетный контроллер MultiWii.
Они совместимы с Arduino и для того, чтобы установить свои настройки вам необходимо будет скачать готовый проект, поправить в нем константы, раскомментировать или закомментировать определенные части кода и залить прошивку на плату. Во время всех этим манипуляций очень велик шанс ошибиться, но если вы не готовы тратится, то вполне можно использовать полетный контроллер MultiWii.
Для нашего коптера мы используем полетный контроллер DJI NAZA. Для работы с ним есть специальная утилита в которой можно очень тонко менять многие настройки. А также он дает хорошую стабилизацию полета. Стоит он при этом около 230$.
Полетный контроллер DJI NAZA
2. Аппаратура радиоуправления
Представляет собой передатчик с пультом и приемник. Отличаются друг от друга количеством каналов и частотой. Частота может быть 433МГц, либо 2,4ГГц. В первом случае придется повозиться с длиннющими антеннами, поэтому лучше покупать передатчик на 2,4ГГц. Аппаратура радиоуправления штука очень полезная и на ней лучше не экономить, так как она вполне может пригодиться в других проектах.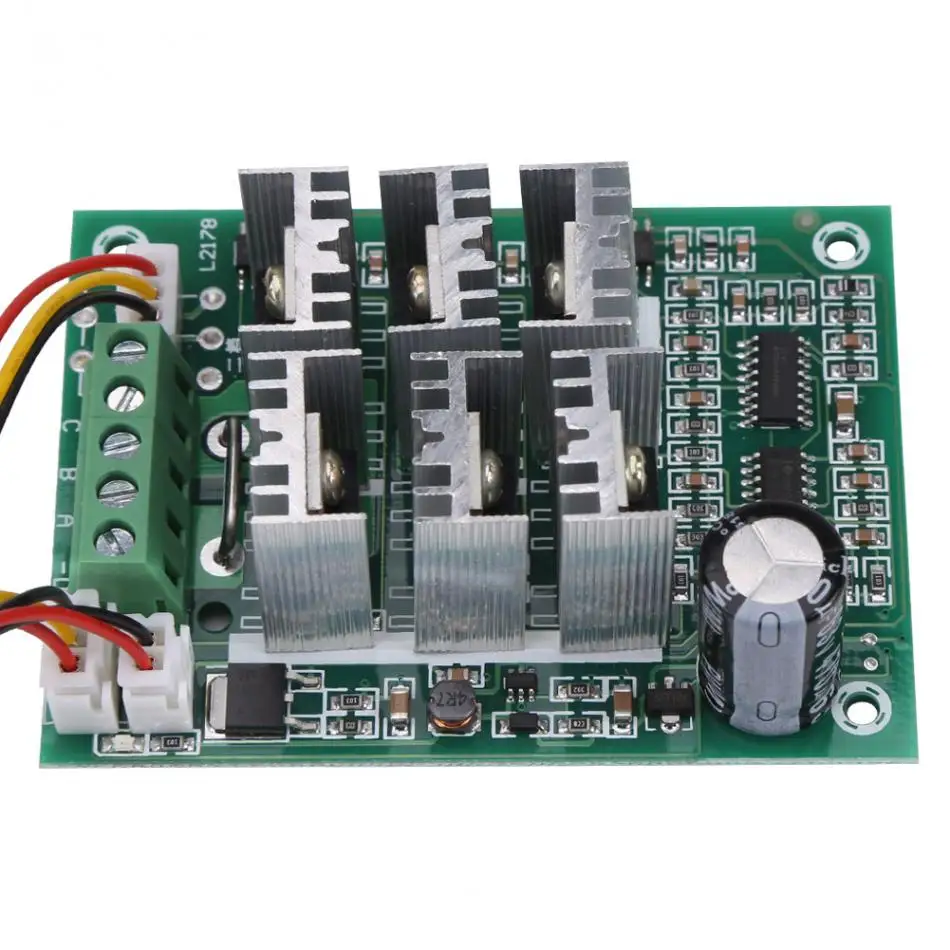 Для своих задач мы приобрели самый оправданный и распространенный вариант — Turnigy 9x. Стоимость такого пульта 54$. К пульту желательно сразу купить специальные аккумуляторы, но можно воспользоваться и простыми батарейками типоразмера AA, которых потребуется 8 штук.
Для своих задач мы приобрели самый оправданный и распространенный вариант — Turnigy 9x. Стоимость такого пульта 54$. К пульту желательно сразу купить специальные аккумуляторы, но можно воспользоваться и простыми батарейками типоразмера AA, которых потребуется 8 штук.
Пульт радиоуправления Turnigy 9x
3. Двигатели и регуляторы скорости
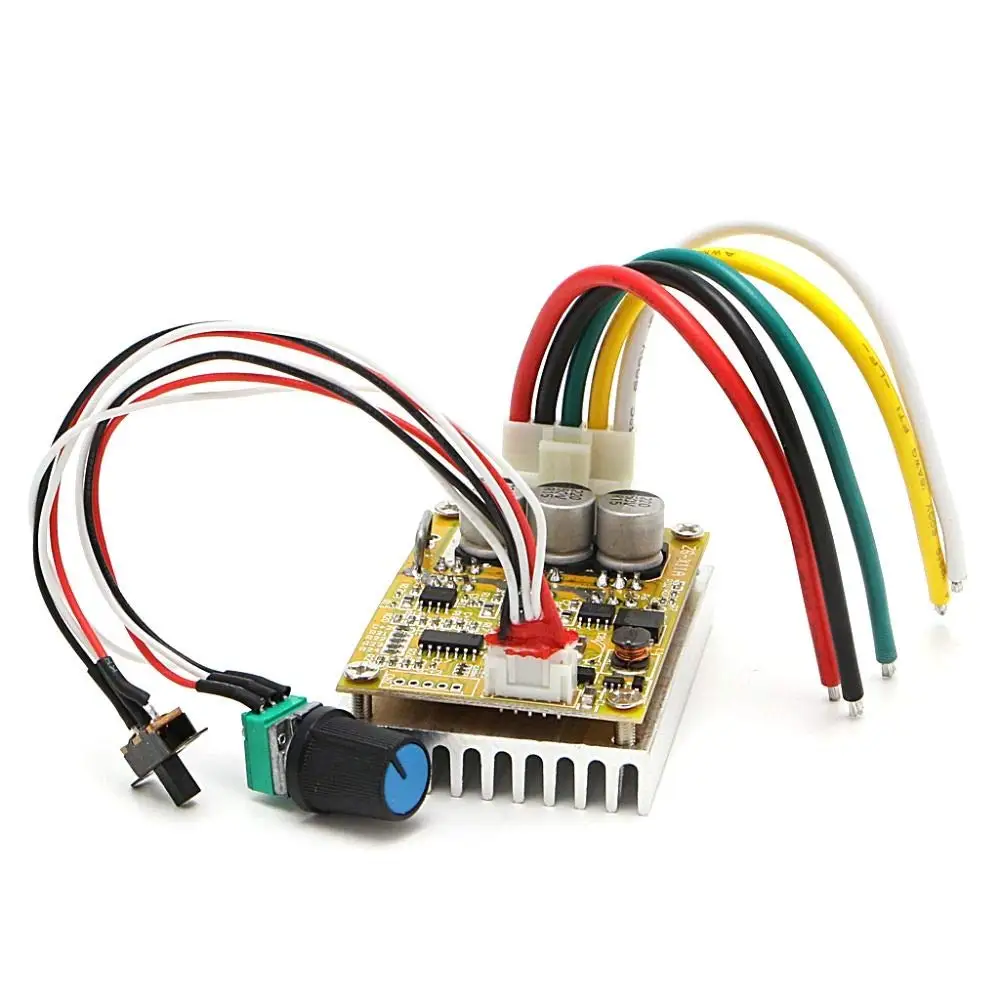
В коптерах используют бесколлекторные двигатели наружного вращения (Brushless Outrunner Motor). Выбор двигателей определяется размерами будущего аппарата. Мы оценивали массу нашего коптера около 2кг, поэтому необходимо было выбрать двигатель с тягой не менее одного килограмма. Вероятность поломки двигателя очень высока, поэтому их стоит брать с запасом. Мы купили шесть вот таких моторов на 20А:
Бесколлекторный двигатель наружного вращения
Стоили они около 13$. Ссылку привести возможности нет — они сняты с производства. Это еще одна причина, по которой стоит приобрести запасные двигатели.
Для управления двигателем служат электронные регуляторы скорости (Electronic Speed Controller, ESC). Их рабочий ток должен быть больше максимального тока двигателей. Их тоже стоит купить больше чем нужно. Мы купили пять регуляторов на 25А по 12$, которые, к сожалению, тоже сняли с производства.
Их рабочий ток должен быть больше максимального тока двигателей. Их тоже стоит купить больше чем нужно. Мы купили пять регуляторов на 25А по 12$, которые, к сожалению, тоже сняли с производства.
Регулятор скорости
При выборе как двигателей, так и регуляторов, необходимо учитывать то, с какими аккумуляторами они могут работать, а точнее, с каким напряжением.
4. Винты
Винтов покупать стоит с большим запасом. У нас большинство первых полетов заканчивались не потому что сели аккумуляторы или надоело, а потому что надо менять очередной сломанный винт. Благо, стоит они недорого. При покупке необходимо учитывать размер и направление вращения. Лучше брать комплекты стандартного и обратного вращения. Мы приобрели три комплекта по 3$ вот таких пропеллеров:
Винты
5. Аккумуляторы
Для питания в полете применяют специальные литий-полимерные (LiPoly) аккумуляторы. При выборе аккумуляторов следует учитывать их емкость, количество ячеек и максимальный разрядный ток. Емкость (в амперах) напрямую влияет на продолжительность полета, но не стоит увлекаться — чем больше емкость, тем больше масса! Для нашего коптера мы покупали аккумуляторы на 3А. Количество банок определяет выходное напряжение. Каждая банка может быть заряжена до 3-4 В. Необходимо понимать, что 3х баночный аккумулятор на 3А запасает в три раза больше энергии, чем однобаночный, но и тяжелее в три раза. Максимальный разрядный ток — это максимальный ток, который может выдавать аккумулятор в течении 10с. Мы купили аккумуляторы с разрядным током 40С. Это значит, что он сможет выдавать до 120А тока в пике. Это больше чем могут потреблять двигатели (четыре по 20А). Аккумуляторов тоже стоит купить парочку, чтобы менять по мере использования. Мы купили два по 22$.
Емкость (в амперах) напрямую влияет на продолжительность полета, но не стоит увлекаться — чем больше емкость, тем больше масса! Для нашего коптера мы покупали аккумуляторы на 3А. Количество банок определяет выходное напряжение. Каждая банка может быть заряжена до 3-4 В. Необходимо понимать, что 3х баночный аккумулятор на 3А запасает в три раза больше энергии, чем однобаночный, но и тяжелее в три раза. Максимальный разрядный ток — это максимальный ток, который может выдавать аккумулятор в течении 10с. Мы купили аккумуляторы с разрядным током 40С. Это значит, что он сможет выдавать до 120А тока в пике. Это больше чем могут потреблять двигатели (четыре по 20А). Аккумуляторов тоже стоит купить парочку, чтобы менять по мере использования. Мы купили два по 22$.
Литий-полимерный аккумулятор
Дополнительно нам пришлось докупить коннекторов по 3$. Мы сделали это из-за того, что наши аккумуляторы продавались с нестандартными разъемами. Но даже если у вас используются эти разъемы, лучше докупить, чтобы установить на раме коптера или использовать их в других проектах.
6. Прочее
Выше перечислены те элементы, которые непосредственно необходимы для постройки коптера. Кроме этого понадобятся некоторые аксессуары, например, зарядное устройство для аккумуляторов за 23$. LiPoly-аккумуляторы нуждаются в специализированных зарядниках. Это связано с тем, что все ячейки аккумулятора должны быть заряжены равномерно и имеют дополнительный разъем для балансировки. Зарядники эти универсальны, то есть их можно использовать также для зарядки свинцовых автомобильных аккумуляторов, или других. Еще одна приятная особенность — они умеют разряжать аккумуляторы и проверять их емкость. Одна беда — питаются эти зарядные устройства, обычно от 12В. То есть необходим еще и сетевой блок питания. Мы купили обычный блок питания от MeanWell примерно за 20$ и соединили их раз и навсегда:
Зарядное устройство
Также совершенно необходимо купить тестер для батареи (около 4$). Он поможет быстро проверить остаток заряда и состояние ячеек. Можно закрепить его на раме коптера — при разряде он будет издавать громкий звуковой сигнал.
Для удобства балансировки винтов можно обзавестись специальным инструментом — балансиром. Он поможет проверить равенство плеч.
Балансир и тестер
Итоги
Полетный контроллер — 230$
Пульт радиоуправления — 54$
Двигатели — 6х13$ = 78$
Регуляторы скорости — 5х12$ = 60$
Винты — 3х3$ = 9$
Аккумуляторы — 2х22$ = 44$
Зарядное устройство — 23$
Блок питания — 20$
Тестер — 3$
Таким образом нам коптер обошелся в 521$. Доставка такого набора стоила около 40$. Обратите внимание, что аккумулятор, зарядник и аппаратуру радиоуправления вполне можно использовать и в других проектах. Двигатели и регуляторы оборотов также стандартные и могут быть использованы для строительства других летающих моделей.
Ссылки на остальные части цикла статей о квадрокоптерах:
Часть 1. Что такое квадрокоптер
Часть 3. Все об аккумуляторах для квадрокоптеров
Часть 4. Рама квадрокоптера
Часть 5. Подсветка коптера
Часть 6. Подключение элементов квадрокоптера
Часть 7. Настройка пульта Turnigy9x для коптера
Настройка пульта Turnigy9x для коптера
Часть 8. Настройка регуляторов оборотов бесколлекторного двигателя
Часть 9. Настройка полетного контроллера DJI NAZA
Часть 10. Гиростабилизированный подвес для камеры SJ4000
Мы будем очень рады, если вы поддержите наш ресурс и посетите магазин наших товаров shop.customelectronics.ru.
Бесколлекторный электродвигатель с датчиком Холла
Бесколлекторные электродвигатели обычно более надёжны и долговечны по сравнению с коллекторными. Также бесколлекторные электродвигатели, как правило, менее шумные. По этому они всё чаще используются там где раньше использовали коллекторные двигатели и по этим причинам они почти всегда (если не совсем всегда) используются в вентиляторах (или как их еще называют «кулерах») для охлаждения электроники (напр. процессоров компьютеров) т.к. иначе их пришлось бы менять гораздо чаще и постоянно слышать более громкий шум. Бесколлекторные двигатели могут обладать большим КПД по сравнению с коллекторными при использовании быстрых электронных ключей с низким активным сопротивлением в открытом состоянии.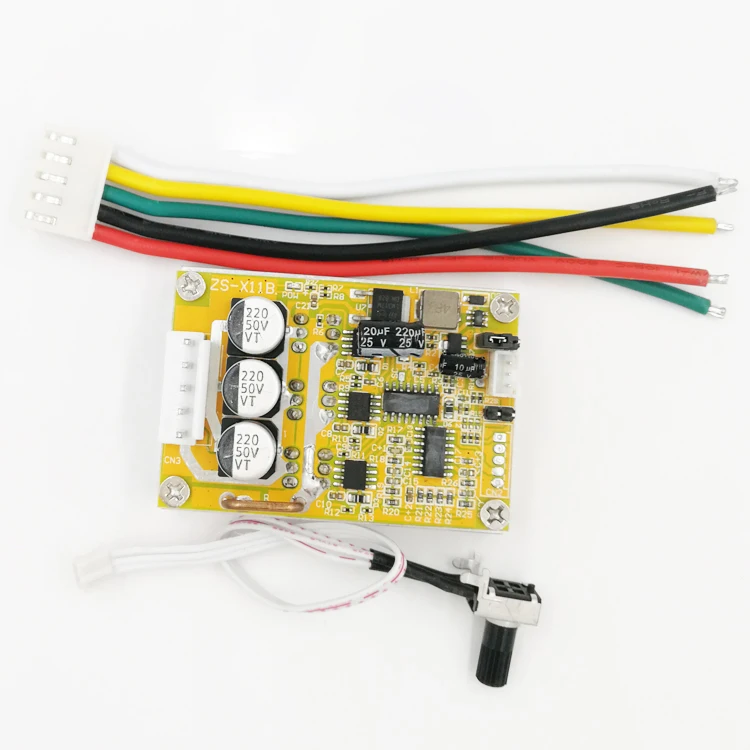 Вполне возможно что так и есть в большинстве случаев. Недостатком бесколлекторных электродвигателей является то что для их работы требуется электроника которая в большей степени подвержена воздействию электромагнитных помех чем щёточно коллекторный узел коллекторных электродвигателей. К тому же это усложняет изготовление в «кустарных» условиях. Но, на самом деле, изготовить бесколлекторный электродвигатель в «кустарных» условиях совсем не трудно. Далее мы рассмотрим принцип работы бесколлекторного электродвигателя с датчиком Холла и попробуем изготовить такой в домашних условиях из почти подручных материалов. Статья о бесколлекторном электродвигателе уже имеется в данном блоге http://electe.blogspot.com/2017/03/blog-post.html там описан принцип работы простейшего шагового двигателя и режимы управления им. В шаговых двигателях, как правило, отсутствует обратная связь с датчиком положения ротора. Датчиком положения ротора может быть например датчик Холла. Датчик Холла — это такой датчик который реагирует на величину магнитного поля проходящего через этот датчик, в этом датчике проявляется эффект Холла который и вызывает эту реакцию.
Вполне возможно что так и есть в большинстве случаев. Недостатком бесколлекторных электродвигателей является то что для их работы требуется электроника которая в большей степени подвержена воздействию электромагнитных помех чем щёточно коллекторный узел коллекторных электродвигателей. К тому же это усложняет изготовление в «кустарных» условиях. Но, на самом деле, изготовить бесколлекторный электродвигатель в «кустарных» условиях совсем не трудно. Далее мы рассмотрим принцип работы бесколлекторного электродвигателя с датчиком Холла и попробуем изготовить такой в домашних условиях из почти подручных материалов. Статья о бесколлекторном электродвигателе уже имеется в данном блоге http://electe.blogspot.com/2017/03/blog-post.html там описан принцип работы простейшего шагового двигателя и режимы управления им. В шаговых двигателях, как правило, отсутствует обратная связь с датчиком положения ротора. Датчиком положения ротора может быть например датчик Холла. Датчик Холла — это такой датчик который реагирует на величину магнитного поля проходящего через этот датчик, в этом датчике проявляется эффект Холла который и вызывает эту реакцию. Для большей простоты использования, производители датчиков Холла встраивают в них дополнительные устройства напр. усилители, триггеры и т.д. Напр. в большинстве современных вентиляторов для охлаждения электроники стоят цифровые датчики Холла т.е. такие которые выдают на выходе цифровые сигналы зависящие от направления магнитной индукции через датчик. Использование таких датчиков значительно упрощает разработку бесколлекторного электродвигателя т.к. отпадает необходимость в дополнительных внешних устройствах усиления и оцифровки сигнала.
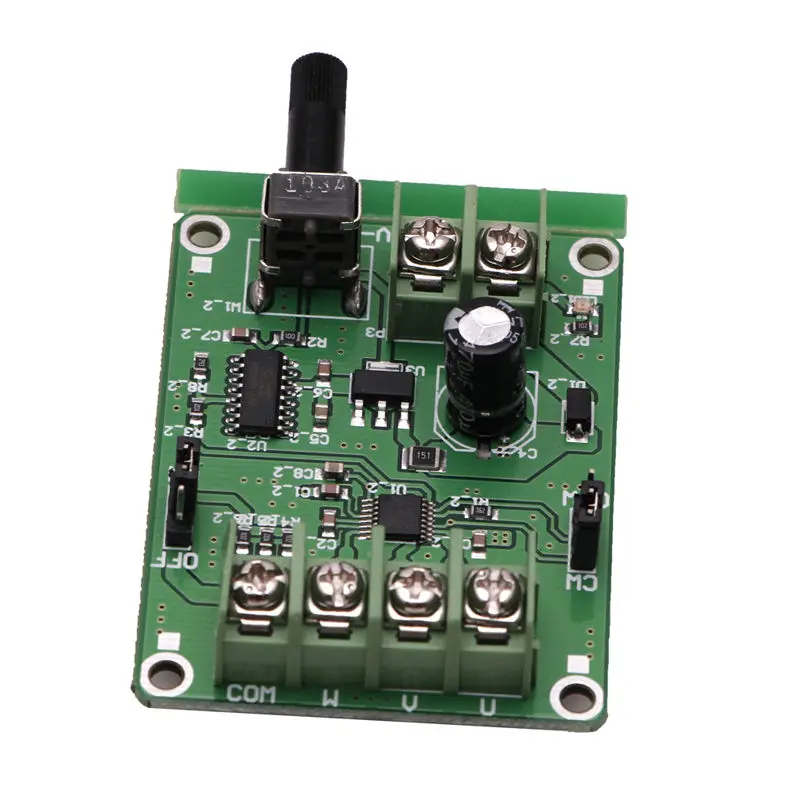
Для большей простоты использования, производители датчиков Холла встраивают в них дополнительные устройства напр. усилители, триггеры и т.д. Напр. в большинстве современных вентиляторов для охлаждения электроники стоят цифровые датчики Холла т.е. такие которые выдают на выходе цифровые сигналы зависящие от направления магнитной индукции через датчик. Использование таких датчиков значительно упрощает разработку бесколлекторного электродвигателя т.к. отпадает необходимость в дополнительных внешних устройствах усиления и оцифровки сигнала.Конструкций бесколлекторных электродвигателей очень много. Двигатели маленьких вентиляторов могут быть устроены так:
Одна катушка с магнитопроводом образующим две пары полюсов:
Меняя направление тока в катушке мы меняем направления магнитной индукции в полюсах:
Датчик Холла расположен в промежутке между полюсами:
Снаружи расположен кольцевой постоянный магнит с двумя парами полюсов:
Этот магнит является частью ротора и вращается вместе с ним.

Микросхема получает информацию от датчика Холла и подаёт ток в катушку в нужном направлении:
Давайте теперь посмотрим как это может работать:
Допустим магнит повёрнут к датчику Холла северным полюсом и магнитное поле входит в этот датчик, датчик подает сигнал микросхеме и она подает ток на катушку, ротор начинает поворачиваться к устойчивому положению. В момент достижения этого положени, его вращение не прекращается т.к. ротор набрал скорость то он продолжает вращаться по инерции,
повернувшись немного дальше устойчивого положения, магнит ротора меняет направление магнитной индукции через датчик Холла. Датчик подаёт сигнал микросхеме которая меняет направление тока в катушке, ротор продолжает вращаться в том же направлении,
после перехода следующего устойчивого положения, направление тока снова меняется и так продолжается до тех пор пока не будет отключено питание.
Однако если ротор изначально находиться в устойчивом положении то двигатель не запуститься при подаче питания.
 Если разобрать и посмотреть реальные двигатели вентиляторов то можно увидеть что в них непростая магнитная система и датчик Холла расположен не посередине между полюсами. Возможно эти меры и избавляют двигатели от данного недостатка и двигатели запускаются всегда.
Если разобрать и посмотреть реальные двигатели вентиляторов то можно увидеть что в них непростая магнитная система и датчик Холла расположен не посередине между полюсами. Возможно эти меры и избавляют двигатели от данного недостатка и двигатели запускаются всегда.Пытаться изготовить подобную конструкцию в «кустарных» условиях будет не просто т.к. нужен магнит специальной формы, правильно искривлённой формы магнитная система и множество других хитростей. Для того чтобы упростить себе жизнь, надо:
во первых отказаться от магнитопровода в катушках статора вообще т.к. он приведет к возникновению эффекта «залипания» (об этом эффекте см. предыдущую статью про бесколлекторный электродвигатель http://electe.blogspot.com/2017/03/blog-post.html). Также можно использовать магнитную систему с меньшим числом пар полюсов т.е. с одним т.к. один меньше двух а с числом пар полюсов меньшим единицы ничего работать не будет т.к. в таком случае полюсов не будет вообще. Сделать можно примерно так:
Взять два стальных диска достаточной толщины. Поставим их друг напротив друга.
Разместим внутри четыре неодимовых магнита так чтобы с одной стороны магнитное поле было направлено в одну сторону и с другой в противоположную:
Диски с магнитами будут соединены друг с другом и будут являться частью ротора
На статоре будут две катушки, соединенные так чтобы при подаче тока на два провода эти катушки создавали магнитные поля в противоположных направлениях:
Ещё один магнитик расположим снаружи и прикрепим к ротору. Датчик Холла разместим рядом с этим магнитом но так чтобы этот датчик был неподвижен:
Теперь давайте разберёмся с электроникой бесколлекторного электродвигателя.
Нам понадобиться цифровой датчик Холла для бесколлекторных электродвигателей.
Обычно такие датчики имеют выход с открытым коллектором поэтому понадобиться ещё и резистор на 10кОм
Также понадобиться микросхема CD4049 с элементами не
И мостовой драйвер двигателей L293D
теперь не трудно догадаться как всё это соединить
смотрите схему:
Для того чтобы двигатель заработал возможно придется немного поэксперементировать с расположением датчика Холла и других элементов конструкции. По данной теме можно посмотреть видео:
Конструкция простая и легко повторимая
Двигатель работает и его даже можно реверсировать повернув датчик Холла.
неодимовые магниты http://got.by/2nmklw
драйвер двигателя l293d http://got.by/2d05t8
микросхема 4049 с элементами НЕ внутри http://got.by/2nmlrp
Резистор можно откуда нибудь выпаять.
Датчик Холла надо подобрать правильный цифровой (не аналоговый), к сожалению не нашёл таких же как у меня
http://got.by/2nmlfg
КАРТА БЛОГА (содержание)
Различные типы контроллеров бесщеточного двигателя
Бесщеточный ESC —
Контроллер бесщеточного двигателя —
Там, где бесщеточный ESC обычно преобразует входящее напряжение в правильную схему привода для бесщеточного двигателя, контроллер бесщеточного двигателя может быть намного лучше оптимизирован для обеспечения ряда преимуществ в производительности, включая управление с обратной связью с использованием обратной ЭДС для обеспечения постоянной скорости при переменной нагрузке.Важно отметить, что контроллер бесщеточного двигателя может быть разработан специально для бесщеточного двигателя постоянного тока с датчиком (в отличие от бесщеточного двигателя без датчика). Всегда помните, что контроллер бесщеточного двигателя без датчика может управлять бесщеточным двигателем с датчиком или без датчика, но контроллер двигателя без датчика может управлять только бесщеточным двигателем с датчиком.
S Контроллер бесщеточного двигателя без датчика –
Драйвер двигателя BLDC —
SPARK MAX Контроллер бесщеточного и щеточного двигателя постоянного тока
SPARK MAX — это бесщеточная версия семейства контроллеров двигателя SPARK. Основываясь на прочном фундаменте оригинала, SPARK MAX включает усовершенствованное щеточное и бесщеточное управление двигателем постоянного тока в небольшом и простом в использовании корпусе с возможностью подключения ШИМ, CAN и USB.Никогда прежде контроллер мотора FRC не имел встроенного интерфейса USB для настройки и управления. Пользователи могут тестировать прототипы и настраивать параметры без необходимости в полной системе управления.SPARK MAX — это настоящий универсальный контроллер, который расширяет границы возможностей команд.
Характеристики :
- Щеточный и сенсорно-бесщеточный Управление двигателем: Управляйте бесщеточными и щеточными двигателями!
- Интерфейсы:
- PWM, CAN, USB: Управляйте контроллером с помощью PWM или CAN и настройте контроллер с вашего компьютера.
- Конфигурация и управление USB
- Разъем USB типа C
- Быстрая конфигурация с ПК
- Сохранение / загрузка конфигураций
- Реалистичное прототипирование с использованием фактических параметров управления
- Интеллектуальные режимы управления
- Управление по замкнутому контуру
- Режим ведомого
- Порт данных (кабель порта данных am-2617 в комплект не входит)
- Аналоговый вход
- Вход концевого выключателя
- Вход квадратурного энкодера с индексом
- Разъем бесщеточного датчика постоянного тока
- Трехфазные датчики Холла
- Датчик температуры двигателя
- Совместим со следующими двигателями:
- NEO Бесщеточный двигатель
- NEO 550 Бесщеточный двигатель
- CIM Motors
- Redline Motors
Компоненты в комплекте с SPARK MAX :
- 1 — Кабель JST-PWM для ШИМ-управления
- 1 — Кабель JST-CAN для CAN Control
- 1 — Кабель USB Type C — USB A для конфигурации контроллера
- 1 — Крышка порта данных для защиты от мусора и пыли, когда он не используется
Дополнительные компоненты, входящие в комплект с SPARK MAX с дополнительным комплектом разъемов :
- Бесщеточный комплект Powerpole (am-4268)
- 18 — Контакты PP45
- 8 — Красный Корпуса
- 8 — Черные корпуса
- 2 — Белые корпуса
Поддержка по электронной почте @ revrobotics.com и укажите свой номер заказа AndyMark.
Файлы, размещенные на REV Robotics :
Контроллер бесщеточного двигателя постоянного тока — SBL2360T с низким энергопотреблением, 30 А, двухканальный от SDP / SI
Номер детали: NR4-SBL2360T
- Описание:
- Бесщеточный контроллер двигателя постоянного тока
- Двухканальный
- 2 х 30А
- 60 В
- USB
- CANbus
- Трапециевидный / синусоидальный
- FOC
- 14 Dig / Ана IO
- Пластина охлаждения
- СТО ПЛЭ
- Cat3
- SIL3
Тип двигателя:
Бесщеточный DCМощность:
Максимальное напряжение: 60
Количество каналов: 2
Максимальный ток на канал: 30
Непрерывный ток на канал: 20
Разъемы питания: Винтовые клеммы
Полевое управление (FOC): Да
Коммутация
Трапецеидальная: ДаСинусоидальная: Нет
Связь
RS232: ДаRS485: Да
USB: Да
CANbus: Да
Ethernet: Нет
Датчик ротора
Энкодер: ДаХолл: Да
Sin / Cos: Да
SSI: Да
SPI: №
Резольвер: №
Входы / Выходы
Максимальное количество аналоговых входов: 8Максимальное количество цифровых входов: 10
Максимальное количество цифровых выходов: 4
Максимальное количество импульсных входов: 8
Функциональная безопасность
Safe Torque Off (STO): НетМеханический
Охлаждение: Проводящая пластинаРазмеры: 123 мм x 83 мм x 25 мм
Вес: 215 г
Контроллер бесщеточного двигателя постоянного тока для электромобиля
Существующие обзоры контроллера бесщеточного двигателя постоянного тока для электромобиля
Хорошее обслуживание и высокое качество продукции
Несколько дней назад я купил двигатель BLDC мощностью 750 Вт и этот контроллер.Сначала я не знал, как подключить его к мотору, после просмотра видео, рекомендованного инженерами ATO, я обнаружил, что он очень прост в использовании. Спасибо за хороший сервис и качественную продукцию.
Из: Навиафан | Дата: 22.01.2019
Был ли этот обзор полезным? да Нет (1/1)
Значение выходного напряжения
Здравствуйте,Я хотел бы узнать значения выходного напряжения контроллера:
A: выход U / 1 / фаза A,
B: выход V / 2 / B фаза,
C: выход W / 3 / Фаза C,
Спасибо.
Из: Закарии | Дата: 07.01.2019
Был ли этот обзор полезным? да Нет (0/0)
Фазный выход контроллера A / B / C представляет собой переменное напряжение, значение напряжения изменяется с изменением скорости двигателя, а не фиксированное значение.
Техническая проблема контроллера двигателя BLDC серии ATOTH-G
Для контроллера двигателя BLDC серии ATOTH-G нужно ли настраивать контроллер с использованием соединения RS232 перед его использованием?
Из: Мэттью Рамирес | Дата: 22.07.2019
Был ли этот обзор полезным? да Нет (0/0)
Не нужно ничего настраивать через соединение RS232.
Как только вы получите контроллер, вы можете подключить терминалы и работать в соответствии с видео, которое мы вам отправили.
Подключение контроллера двигателя BLDC серии ATOTH-G
Нужно ли нам подавать какое-либо другое напряжение, кроме 24 В постоянного тока, на контроллер двигателя BLDC серии ATOTH-G B?
Из: Аркаправа | Дата: 08.06.2019
Был ли этот обзор полезным? да Нет (0/0)
Подключение контроллера двигателя BLDC серии ATOTH-G
Для контроллера мотора BLDC серии ATOTH-G нужно ли нам подавать какой-либо другой источник питания, кроме контроллера B?
Из: Аркаправа | Дата: 08.06.2019
Был ли этот обзор полезным? да Нет (0/0)
Нет, вам не нужен другой блок питания.
Подключение контроллера двигателя BLDC серии ATOTH-G
Обязательно ли для контроллера двигателя BLDC серии ATOTH-G добавлять контактор и резистор предварительной зарядки на положительной стороне входа батареи?
В данном видео контакторы и резисторы предварительной зарядки не подключены, но в контроллере мотора они добавлены для управления пусковым током.
Подскажите, пожалуйста, включены ли в конструкцию контроллера этот контактор и резистор предварительного заряда?
Из: Аркаправа | Дата: 30.10.2019
Был ли этот обзор полезным? да Нет (0/0)
Нет необходимости добавлять контактор и резистор предварительной зарядки на положительной стороне входа аккумулятора, просто подключите к источнику питания напрямую.
Что нужно сделать перед покупкой
В руководстве пользователя для вашего контроллера двигателя BLDC серии ATOTH-G описывается режим конфигурации через последовательное соединение.Но что можно настроить в контроллере? параметры ПИ-корректора?
Из: Пол Витасек | Дата: 27.04.2020
Был ли этот обзор полезным? да Нет (1/0)
1.Вы можете просматривать общие параметры двигателя, подключенного к контроллеру, через программное обеспечение, можете устанавливать пиковый ток, параметры торможения и т. Д. Это программное обеспечение имеет несколько практических применений.
2. Контроллер имеет только интерфейс RS232.
Изолирована ли цепь скорости 0-5 В для контроллера мотора BLDC?
Изолирована ли цепь скорости 0-5 В для вашего контроллера мотора BLDC? Другими словами, моя схема управления требует, чтобы мое задание скорости 0–5 В поступало не от контроллера 5 В, а от моего собственного источника питания.Я подключу 0 В моей батареи к COM на контроллере. Мое опорное напряжение будет подключено к опорному входу на контроллере. Я НЕ буду использовать источник напряжения 5 В на контроллере.
Из: Джоэл Форкер | Дата: 05.10.2020
Был ли этот обзор полезным? да Нет (0/0)
Да, вы можете использовать напряжение батареи для обеспечения 0-5 В без использования + 5 В контроллера, подключить 0 В питания батареи к COM на контроллере и подключить положительный полюс батареи к SV контроллера.
У меня есть сомнения по поводу двигателя BLDC
В спецификации вашего контроллера мотора ATOTH-G BLDC на веб-сайте указана частота 16,6 кГц. Один из наших инженеров-электриков хотел знать, какая часть этого отразится на шине постоянного тока?
Из: Агнус | Дата: 27.10.2021
Был ли этот обзор полезным? да Нет (0/0)
Частота будет падать, когда она будет возвращена в шину постоянного тока, но это в основном в форме тока и не влияет на напряжение.Более того, если вам нужно повысить качество шины постоянного тока, вы можете просто добавить фильтр нижних частот постоянного тока на стороне питания привода.
Контроллеры бесщеточных двигателей — Сервосила
Контроллеры бесщеточных двигателей Servosila
Контроллеры бесщеточных двигателей SERVOSILA SC-25 — это миниатюрные электронные блоки, обеспечивающие высокоточное управление широким спектром механизмов, приводимых в действие бесщеточными электродвигателями (PMSM, BLDC) любого производителя.Контроллеры превращают бесщеточные двигатели в управляемые компьютером тяговые приводы, высокоточные прямые приводы или сервоприводы, когда (опционально) соединены с датчиками абсолютного положения (BISS-C, SSI, SPI, PWM или Quadrature) любого производителя.
Обеспечивается до 25 А междуфазного тока и до 20 бит угловой точности. Электронные блоки оснащены микропроцессорным чипом, набором интерфейсов абсолютного энкодера для измерения положения вала, встроенной реализацией усовершенствованных алгоритмов управления движением, которые работают в режиме замкнутого контура, а также CANbus / CANopen и USB 2.0 для приема команд от управляющего компьютера / ПЛК и отправки телеметрии обратно.
Контроллеры бесщеточных двигателей широко используются в различных продуктах Servosila, включая линейки роботизированных манипуляторов и сервоприводов. В конструкции контроллеров учтены многочисленные уроки, извлеченные «Сервосилой» при эксплуатации своих роботов в различных средах.Контроллеры SERVOSILA SC-25 бывают двух различных форм: прямоугольной (SC-25R) и круглой (SC-25C).Обе модели идентичны по возможностям, функциям, прошивке и внешним электрическим разъемам. Промышленные дизайнеры могут предпочесть одну модель другой в зависимости от того, над какими приводными механизмами они работают. В то же время инженеры-электрики и программисты уверены, что какая бы модель ни была выбрана для конкретной конструкции, полная электрическая и программная совместимость сохранится.
Типичные области применения контроллеров SERVOSILA SC-25:
- сервоприводы, сервомеханизмы,
- тяговые электроприводы, тяговые приводы,
- промышленные машины, насосы, конвейерные ленты,
- роботов,
- складов робототехники, магазинов робототехники,
- испытательное оборудование, стенды,
- автоматизированная измерительная и диагностическая аппаратура,
- станки с ЧПУ,
- сработали системы компьютерного зрения.
- Двигатели постоянного тока бесщеточные (ПМСМ, BLDC) любых производителей,
- … с датчиком или без датчика,
- … с абсолютным датчиком положения вала или без него,
- … с коробкой передач или без нее,
- … с синусоидальным или трапециевидным управлением,
- , а также щеточные двигатели постоянного тока (до 2 щеточных двигателей могут быть подключены к одному контроллеру одновременно) и соленоиды.
- Интерфейс энкодера BISS-C (включая популярные магнитные энкодеры RLS),
- Интерфейс энкодера SSI,
- Интерфейс энкодера SPI,
- Интерфейс энкодера PWM,
- Квадратурный интерфейс
Внешние датчики абсолютного положения (опция) обеспечивают такие функции, как сервоуправление, надежное управление скоростью на низких скоростях, функцию торможения и различные функции безопасности.Если у электропривода нет энкодера, контроллеры могут работать с датчиками Холла или в режиме управления положением разомкнутого контура, аналогичном шаговым двигателям.
Бессенсорный режим управления доступен для управления бесщеточными двигателями, не имеющими встроенных датчиков Холла или подключенных энкодеров.
Контроллеры спроектированы так, что, если присутствует кодировщик, система будет пытаться использовать его, когда это имеет смысл. Если кодировщика нет, система по-прежнему будет работать правильно, но может работать не так хорошо, как с кодировщиком.
Контроллеры поставляются с припаянными разъемами (Molex и TE Connectivity) для подключения фазных линий, линий питания, датчиков, энкодеров и информационных шин. Помимо разъемов, электронные блоки имеют отверстия под пайку для каждой сигнальной или силовой линии; отверстия позволяют припаять кабели непосредственно к платам для образования виброустойчивых соединений.
Разъемы намеренно размещены только на лицевой стороне плат.На тыльной стороне плат разъемов нет. Задняя сторона предназначена для установки радиатора или для крепления плат непосредственно к корпусу, который выполняет роль радиатора.
Все разъемы направлены вверх перпендикулярно платам. Ни один из разъемов не обращен вбок. Такое расположение упрощает прокладку кабелей в ограниченном пространстве, например в цилиндрических корпусах сервоприводов или мобильных шасси.
Контроллеры SERVOSILA имеют два порта CANbus (параллельные).Это упрощает подключение нескольких контроллеров в цепочку, например, внутри манипулятора-манипулятора или шасси робота, и упрощает процесс ремонта или замены в полевых условиях.
Все контроллеры имеют встроенный клеммный резистор на 120 Ом, предписанный стандартом CANbus. Резистор можно включить или выключить с помощью перемычки. Только один контроллер в цепи должен иметь включенный оконечный резистор.
Существует способ обновить микропрограмму контроллеров через порт RS232, включая обновление микропрограммы на месте сервоприводов или мобильных транспортных средств.
Режимы работы и возможности
Контроллеры бесщеточных двигателей SERVOSILA SC-25 могут управлять двигателями несколькими способами, называемыми «режимами». Контроллеры переключаются из одного режима в другой при получении команд, отправленных через CANbus или USB 2.0 управляющим компьютером / ПЛК.
- «Контроль крутящего момента». В этом режиме система строго контролирует заданный крутящий момент, с которым бесщеточный двигатель приводит в действие свою полезную нагрузку.Этот режим обычно используется всякий раз, когда важен крутящий момент, а не скорость двигателя, например, в тестовом / диагностическом оборудовании или в высокодинамичном шагающем роботе.
- «Электронный регулятор скорости (ESC)». В этом режиме контроллеры SERVOSILA поддерживают постоянную заданную скорость вращения валов двигателей под воздействием различных внешних сил. Контроллеры автоматически увеличивают или уменьшают крутящий момент в ответ на возмущения внешних нагрузок, таким образом поддерживая постоянную скорость привода.Этот режим часто используется при приведении в действие насосов, конвейерных лент, тяговых приводов, мобильных шасси и во многих других приложениях.
- «Сервоуправление». В этом режиме контроллер превращает бесщеточный двигатель в серводвигатель, способный удерживать заданное положение (с коробкой передач или без нее). После получения сервокоманды контроллер сначала перемещает выходной вал привода в определенное заданное положение (угол), а затем удерживает это положение под воздействием внешних сил, которые пытаются нарушить баланс.В этом режиме требуется энкодер для измерения абсолютного положения выходного вала привода. Энкодер может быть подключен к контроллеру через один из доступных интерфейсов энкодера (BISS-C, SSI, SPI, PWM, Quadrature). Поддерживается угловая точность до 20 бит. Режим сервоуправления широко используется в различных приложениях, от сервоприводов манипуляторов-манипуляторов до станков с ЧПУ и роботизированных складских систем.
- «Прямой привод». В этом режиме контроллер непосредственно позиционирует магнитные поля внутри бесщеточного двигателя и обеспечивает максимально возможную точность позиционирования.Этот режим часто используется с электроприводами, не имеющими коробки передач (отсюда и название). Типичные приложения включают системы компьютерного зрения, станки с ЧПУ, приводы с линейными двигателями — все те приложения, в которых избегается использование редуктора, чтобы минимизировать проблемы, связанные с люфтом, которые влияют на точность позиционирования. Бесщеточный двигатель, работающий в режиме прямого привода, намного лучше, чем более традиционный шаговый двигатель.
- «Тормоз». В контроллерах реализован энергоэффективный механизм «стояночного тормоза», который блокирует движение двигателя.Это достигается без необходимости во внешнем тормозном механизме. В этом режиме контроллер контролирует положение ротора бесщеточного двигателя с помощью датчиков Холла или энкодера и выполняет энергоэффективные регулировки магнитного поля внутри двигателя таким образом, что вращение выходного вала блокируется. Встроенный тормозной механизм удобен в приложениях, где может потребоваться остановить движение, а затем поставить на тормоз, например, на конвейерной ленте или в мобильном шасси. Представьте себе мобильного робота, который должен остановиться, поднимаясь по лестнице, а затем использовать полезную нагрузку, оставаясь в наклонном положении в течение длительного периода времени.Режим «стояночного тормоза» эффективно удерживает колеса такого робота на тормозе, не тратя на это слишком много энергии.
- «Рекуперация энергии». Контроллеры способны контролировать (регулировать) поток электрического тока обратно в батарею всякий раз, когда бесщеточный двигатель становится электрическим генератором из-за внешней силы, вызывающей вращение ротора двигателя. Эта функция позволяет использовать контроллеры в стартер-генераторах, когда они соединены с двигателями внутреннего сгорания, или может помочь увеличить дальность действия или долговечность мобильного транспортного средства за счет рекуперации его энергии торможения.Батареи могут нуждаться в дополнительной электронике, чтобы они могли безопасно принимать обратный электрический ток.
- Field-Oriented Control (FOC),
- … с наблюдателем противо-ЭДС и наблюдателем по датчикам Холла,
- … с компенсацией муфты D-Q для плавной работы,
- … с программно управляемым ослаблением поля для достижения скоростей, превышающих номинальную скорость двигателя,
- … с функциями безопасности, основанными на извлеченных уроках,
- … с интеллектуальным управлением динамическими характеристиками привода,
- … и автоматическая системная идентификация параметров двигателя.
Алгоритмы обеспечивают бесшумную работу бесщеточных двигателей, увеличивая доступный крутящий момент, минимизируя потребление энергии и снижая риски перегрева двигателя, поломки коробки передач или причинения травм.
Контроллеры SERVOSILA обеспечивают ограниченное управление щеточными двигателями (по сравнению с бесщеточными) и соленоидами. Щеточные двигатели могут управляться только в режиме разомкнутого контура. Одновременно можно управлять двумя щеточными двигателями или соленоидами (vs.одиночный бесщеточный двигатель).
Идентификация системы
Контроллеры бесщеточных двигателей имеют возможность автоматической идентификации системы, что значительно упрощает ввод в эксплуатацию новых двигателей. Контроллеры способны автоматически определять межфазные сопротивления и индуктивности двигателей, а также другие ключевые характеристики электроприводов. Затем измеренные параметры используются для автоматической настройки различных законов управления и регуляторов в программном обеспечении.Эта функция ускоряет ввод в эксплуатацию новых двигателей и улучшает качество управления двигателем, даже если паспорт двигателя утерян по какой-либо причине.Интерфейсы управления: CAN и USB
Контроллеры бесщеточных двигателей Servosila предоставляют открытый интерфейс управления CANopen и открытый интерфейс USB 2.0, виртуальный COM-порт для приема команд от управляющего компьютера / ПЛК, а также для отправки телеметрии обратно.
Для подключения контроллеров SERVOSILA к компьютеру с Linux или Windows 10/8 не требуются проприетарные драйверы или SDK.И Windows 10/8, и Linux поставляются с предварительно упакованными драйверами и программными API, достаточными для взаимодействия с контроллерами SERVOSILA; это включает популярные дистрибутивы Linux Debian и Ubuntu.
Контроллеры имеют встроенную функцию маршрутизации USB-to-CAN , «встроенный адаптер / ключ USB2CAN», который позволяет ПК / ПЛК получать доступ ко всей сети CANbus через подключение к одному контроллеру SERVOSILA через его USB порт.Другими словами, подключаясь к USB-порту одного контроллера SERVOSILA, управляющий компьютер / ПЛК получает доступ ко всей сети CANbus, к которой подключен контроллер SERVOSILA. До 16 контроллеров, подключенных через свои порты CANbus, могут управляться одним и тем же ПК / ПЛК с помощью встроенной функции маршрутизации USB-to-CANbus. Ограничение в основном связано с пропускной способностью USB-порта контроллера SERVOSILA, который действует как ключ USB2CAN в дополнение к управлению двигателем; в противном случае все устройства в сети CANbus одинаково доступны для управляющего компьютера / ПЛК через соединение с одним контроллером SERVOSILA.Сюда входят устройства, не принадлежащие Servosila, такие как приемники GPS или IMU.
К одному экземпляру CANbus можно подключить до 126 контроллеров SERVOSILA, если управляющий компьютер / ПЛК имеет аппаратный интерфейс CANbus. Linux SocketCAN API можно использовать для разработки программного обеспечения, которое отправляет команды контроллерам SERVOSILA или получает телеметрию обратно от контроллеров.
Многие стандартные программные продукты, такие как LabView, поддерживают SocketCAN API из коробки и поставляются со встроенным стеком CANopen.Если выбран путь к разработке управляющего программного обеспечения с нуля, в Интернете можно найти множество примеров программ с открытым исходным кодом, использующих Linux SocketCAN API.
Каждый раз, когда интерфейс USB 2.0 (вместо интерфейса CANbus) используется для подключения контроллеров SERVOSILA к компьютеру под управлением Linux или Windows 10/8, контроллеры отображаются как виртуальные COM-порты для обеих операционных систем. Затем полустандартный текстовый протокол, называемый SLCAN, используется для отправки команд контроллерам через виртуальный COM-порт, а также для получения обратно телеметрии.
Кроме того, большинство дистрибутивов Linux поставляются со специальным демоном SLCANd, который заставляет контроллеры SERVOSILA, подключенные через виртуальные COM-порты USB, отображаться как устройства CANbus или как ключи USB2CAN. Этот демон позволяет использовать один и тот же Linux SocketCAN API всякий раз, когда контроллеры SERVOSILA подключены к Linux через USB 2.0 или интерфейс CANbus (неважно, какой из них, API по-прежнему является SocketCAN API).
Поскольку системы Windows 10/8 не имеют такого унифицированного API CANbus, способы взаимодействия программного обеспечения системы управления, работающего в Windows, с контроллерами SERVOSILA, включают:- либо через виртуальный COM-порт (USB 2.0) путем записи и чтения из порта с использованием стандартного текстового протокола, называемого SLCAN, который основан на обмене текстовыми строками, отформатированными в соответствии с довольно простой открытой спецификацией,
- или с использованием стороннего адаптера / ключа USB2CAN и любого программного API, предоставляемого адаптером / ключом для Windows.
Как правило, пользовательское программное обеспечение для управляющего компьютера / ПЛК может быть разработано на любом языке, который поддерживает либо Linux SocketCAN API, либо операции чтения / записи для виртуальных COM-портов в Windows 10/8 или Linux.Сюда входят C / C ++, Qt, Java, Python, MATLAB, LabView и многие другие языки и пакеты.
Сервоскоп, графический программный инструмент
Контроллеры SERVOSILA поставляются с графическим программным инструментом Servoscope. Инструмент предоставляет средства для настройки контроллеров, отображения телеметрии в реальном времени, поступающей через CANbus или USB, и отправки команд контроллерам.
Инструмент позволяет визуализировать данные телеметрии в виде графических диаграмм.Это полезно при отслеживании переходных проблем с электроприводами.
Приложение работает в Windows 10/8 или Linux, включая популярные дистрибутивы Debian и Linux. Для запуска инструмента не требуется устанавливать драйверы ни на одной из платформ. Инструмент подключается к контроллерам SERVOSILA через интерфейсы CANbus или USB.
Симулятор электропривода
Приложение Servoscope поставляется со встроенным программным симулятором электроприводов.В реальном времени симулятор численно решает дифференциальные уравнения, которые определяют динамику бесщеточных двигателей, и предоставляет имитированный интерфейс CANbus / CANopen через Linux SocketCAN API для подключения тестируемого программного обеспечения пользователя. Интерфейс программного симулятора точно соответствует интерфейсу реального контроллера SERVOSILA, соединенного с настоящим электроприводом.
Симулятор позволяет отладить программное обеспечение пользователя по протоколу CANbus / CANopen до приобретения реального оборудования.Даже если оборудование доступно, все же разумно сначала протестировать свой код на симуляторе, чтобы избежать риска сжечь двигатель, сломать коробку передач или нанести травму.
Симулятор позволяет моделировать поведение бесщеточных двигателей или систем управления в различных условиях, включая опасные или критические. Симулятор — это один из программных инструментов, входящих в состав приложения Servoscope.
Технические характеристики
| Параметр | Значение | |
|---|---|---|
| Поддерживаемые типы электродвигателей | Бесщеточные двигатели постоянного тока (PMSM, BLDC): с датчиком или без датчика. Матовые двигатели и соленоиды (только разомкнутый контур) | |
| Количество одновременно подключаемых двигателей: | 1 бесщеточный двигатель или до 2 щеточных двигателей или соленоидов | |
| Макс. междуфазный ток | 25 А (рекомендуется радиатор) | |
| Номинальный междуфазный ток | 15 A (рекомендуется использовать радиатор, но обычно не требуется), 12 A (без радиатора) | |
| Входное напряжение | 7-60 В постоянного тока | |
| Режимы работы | Электронное управление крутящим моментом (ETC), Электронное управление скоростью (ESC), Сервоуправление, Управление прямым приводом. Тормоз, Рекуперация энергии, Идентификация системы | |
| Поддерживаемые алгоритмы управления бесщеточным двигателем | Field-Oriented Control (FOC), EMF Observer, Hall Sensors Observer, Компенсация сцепления оси D-Q, Ослабление поля, Управление сбоями, Управление динамикой двигателя | |
| Функция автоматической настройки (идентификация системы) | Есть | |
| Интерфейсы для датчиков абсолютного положения | BISS-C, SSI, SPI, PWM, Квадратурная с индексным сигналом | |
| Макс.разрешение энкодера | 20 бит | |
| Встроенный сетевой маршрутизатор | Маршрутизатор USB-to-CANbus («ключ USB2CAN») Поддерживаются 11-битные и 29-битные идентификаторы | |
| Интерфейсы управления | CANbus с прикладным протоколом CANopen; USB 2.0, виртуальный COM-порт, с протоколом приложения SLCAN | |
| Оконечный резистор CAN-шины 120 Ом | Да (управление перемычкой) | |
| Поддерживаемые скорости передачи данных CANbus | 1 мбит / с 500 кбит / с 250 кбит / с 125 кбит / с 100 кбит / с 50 кбит / с | |
| Порты шины CAN | 2 (параллельно) | |
| USB 2.0 портов | 1 | |
| Поддерживаемые операционные системы | Windows 10, 8 (драйвер не требуется) Linux (драйвер не требуется), включая Debian, Ubuntu, Raspberry PI OS | |
| API программирования | Linux SocketCAN API, CANopen, SLCAN протокол через виртуальный COM-порт (USB2.0) для Windows 10, 8 и Linux. | |
| Программное обеспечение для моделирования электропривода | Есть | |
| Потребляемая мощность на холостом ходу | 120-180 мА | |
| Размеры | Модель SC-25R: 68 мм x 40 мм x 16 мм Модель SC-25C: диаметр 62 мм, высота 16 мм | |
| Масса | ~ 50 г без радиатора |
MC100D Контроллер бесщеточного двигателя
Эта серия цифровых, военизированных, низковольтных, 2-осевых, бесщеточных контроллеров двигателей предназначена для обеспечения замыкания контура крутящего момента, скорости и положения.Контроллер принимает командные сигналы от любой системы управления огнем в цифровом или аналоговом формате и взаимодействует с ручкой управления. Усовершенствованные алгоритмы пространственного вектора обеспечивают оптимальную производительность для новых или существующих двигателей, обеспечивая выдающуюся удельную мощность.
Существует широкий спектр программируемых функций конечного пользователя:
Программно-программируемые функции:
- Расширенный встроенный тест
- Зоны, запрещенные для огня
- Зоны избегания препятствий
- Пределы демпфирования в конце
- Пределы ускорения
- Комплексная настройка петли
- Генератор внутренних функций
- Ослабление поля
- Функция формирования джойстика
- Аналоговые и цифровые входы / выходы
- История статуса и неисправностей
- Возможность регистрации данных
| Технические характеристики | |
|---|---|
| Блок питания | 18 В — 32 В постоянного тока номинальное |
| Температура (опорная плита) | -40oC + 65oC |
| Условия окружающей среды | Соответствует MIL-STD-810F |
| Команда крутящего момента / скорости / положения | через CAN-BUS |
| Спецификация ЭМС | Соответствует MIL-STD-461E |
| Неисправность / обратная связь о состоянии | через CAN-BUS |
| Масса | 7 кг (15.4 фунта) |
| Интерфейс датчика положения | SSI или последовательный интерфейс EnDat |
| Конверт | 312 x 210 x 102 мм (12,3 x 8,3 x 4,0 дюйма) |
| Самозащита | Перегрев / перегрузка по току |
| Выходной ток (для каждой оси) | 50 А пиковый, 25 А непрерывный |
| Опция: комплект стабилизации | 2-осевой гироскопический интерфейс |
% PDF-1.3 % 2014 0 объект > эндобдж xref 2014 год 132 0000000016 00000 н. 0000003015 00000 н. 0000003200 00000 н. 0000003341 00000 п. 0000003374 00000 н. 0000003433 00000 н. 0000004293 00000 н. 0000004562 00000 н. 0000004632 00000 н. 0000004777 00000 н. 0000004875 00000 н. 0000004984 00000 н. 0000005046 00000 н. 0000005180 00000 н. 0000005242 00000 н. 0000005373 00000 п. 0000005545 00000 н. 0000005737 00000 н. 0000005866 00000 н. 0000005991 00000 н. 0000006185 00000 п. 0000006297 00000 н. 0000006437 00000 н. 0000006589 00000 н. 0000006741 00000 н. 0000006887 00000 н. 0000007054 00000 н. 0000007211 00000 н. 0000007346 00000 н. 0000007484 00000 н. 0000007618 00000 н. 0000007804 00000 н. 0000007918 00000 п. 0000008065 00000 н. 0000008197 00000 н. 0000008374 00000 п. 0000008556 00000 н. 0000008681 00000 п. 0000008816 00000 н. 0000008961 00000 н. 0000009075 00000 н. 0000009189 00000 н. 0000009321 00000 п. 0000009456 00000 п. 0000009594 00000 н. 0000009778 00000 п. 0000009921 00000 н. 0000010035 00000 п. 0000010146 00000 п. 0000010285 00000 п. 0000010425 00000 п. 0000010582 00000 п. 0000010735 00000 п. 0000010871 00000 п. 0000011012 00000 п. 0000011201 00000 п. 0000011294 00000 п. 0000011384 00000 п. 0000011505 00000 п. 0000011605 00000 п. 0000011706 00000 п. 0000011803 00000 п. 0000011901 00000 п. 0000011999 00000 н. 0000012097 00000 п. 0000012195 00000 п. 0000012293 00000 п. 0000012391 00000 п. 0000012489 00000 п. 0000012587 00000 п. 0000012685 00000 п. 0000012783 00000 п. 0000012881 00000 п. 0000012979 00000 п. 0000013077 00000 п. 0000013175 00000 п. 0000013273 00000 п. 0000013372 00000 п. 0000013471 00000 п. 0000013570 00000 п. 0000013669 00000 п. 0000013768 00000 п. 0000013867 00000 п. 0000013966 00000 п. 0000014065 00000 п. 0000014164 00000 п. 0000014263 00000 п. 0000014362 00000 п. 0000014461 00000 п. 0000014560 00000 п. 0000014659 00000 п. 0000014758 00000 п. 0000014857 00000 п. 0000014956 00000 п. 0000015055 00000 п. 0000015154 00000 п. 0000015253 00000 п. 0000015352 00000 п. 0000015451 00000 п. 0000015550 00000 п. 0000015649 00000 п. 0000015748 00000 п. 0000015847 00000 п. 0000015946 00000 п. 0000016045 00000 п. 0000016144 00000 п. 0000016244 00000 п. 0000016405 00000 п. 0000017803 00000 п. 0000017912 00000 п.