L298n Схема Подключения — tokzamer.ru
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы LN собранный на платке в виде модуля.
Могут использоваться в двух режимах: 1.
Так как транзисторы в схеме моста имеют разный тип проводимости, то при таком входном сигнале транзисторы Т1 и Т4 останутся в закрытом состоянии, в то время, как через транзисторы Т2 и Т3 потечёт ток. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
CCU+L298N
Такой вариант позволяет управлять скоростью вращения вала и его направлением у двигателя постоянного тока. Если напряжение больше 12 вольт, разомкните контакты на 3 коннекторе.
Подача логической единицы на эти контакты разрешает вращение двигателей, а логический ноль — запрещает.
Можно подключить к ШИМ-выходу для управления скоростью двигателя постоянного тока.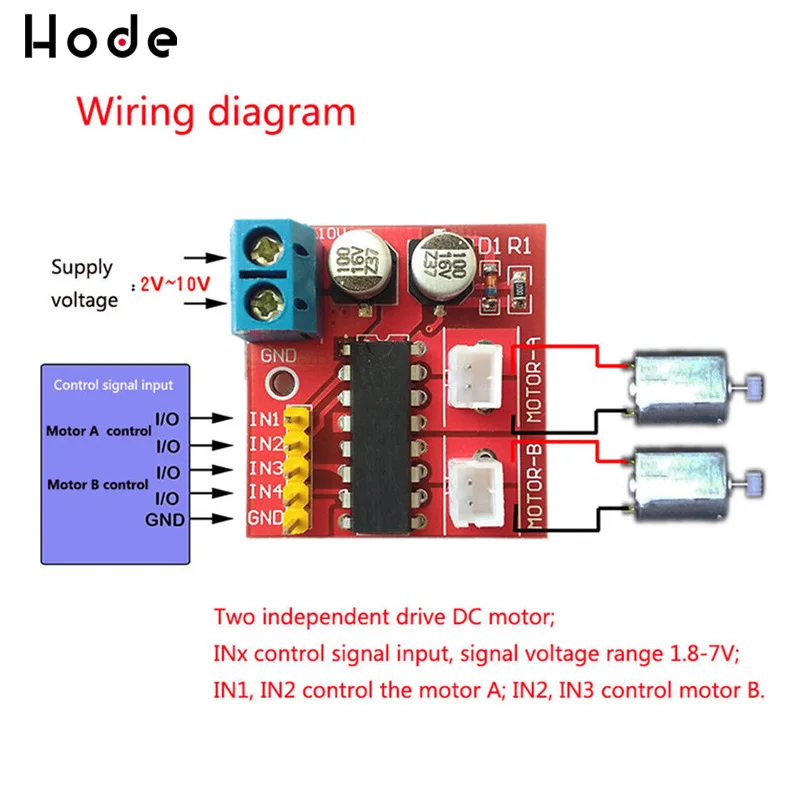
Теперь испробуем простую программу, написанную на Python, которая поможет понять принцип управления электродвигателем постоянного тока.
В таком случае на разъём подаётся только питание для двигателей Vss , контакт Vs остаётся не подключенным, а на плате устанавливается перемычка питания от стабилизатора, который ограничит питающее моторы напряжение до приемлемых 5V.
Шаговый двигатель. Micro Step Driver. PLC Omron. Подключение,программирование. (Часть 1)
Микросхема L298N
Motor Shield разработан на базе микросхемы LN. Их необходимо устанавливать в обвязку микросхемы дополнительно.
Разъём для подачи питания и работа стабилизатора.
LOW Включаем вращение двигателя 1 в одну сторону.
Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль.
 Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер.
Однако, связка «Ардуино — шаговый двигатель» требует дополнительный элемент — драйвер.Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Для изменения скорости вращения щёточных моторов на эти контакты подаётся ШИМ-сигнал.
Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный.
Шаговый двигатель БЕЗ ДРАЙВЕРА!
Подключение модуля L298N
GND — земля. Зажимы, куда подключать моторы Следует отметить, что клеммный зажим с тремя выводами не только подводит к плате питающее напряжение, но и позволяет получить его уже преобразованное для собственных нужд драйвера величиной в 5В, как показано на рисунке выше.
Остановить их вращение можно подачей сигнала LOW на те же указанные выше пины. На схеме ниже приведен пример распределения выводов LN от рабочей микросхемы.
HIGH time. Мы использовали танковую платформу, учитывая что мотор крутит редуктор и гусеницы, то для его запуска требуется приличный ток.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости. Схема соединения Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками , где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Всё это приведёт к вращению мотора в определённом направлении. Блок клемм 3 отвечает за подключение питания двигателей.
Подключение L298N к плате Arduino
Причем некоторые пины должны поддерживать ШИМ-модуляцию. При этом есть возможность изменять скорость и направление вращения моторов.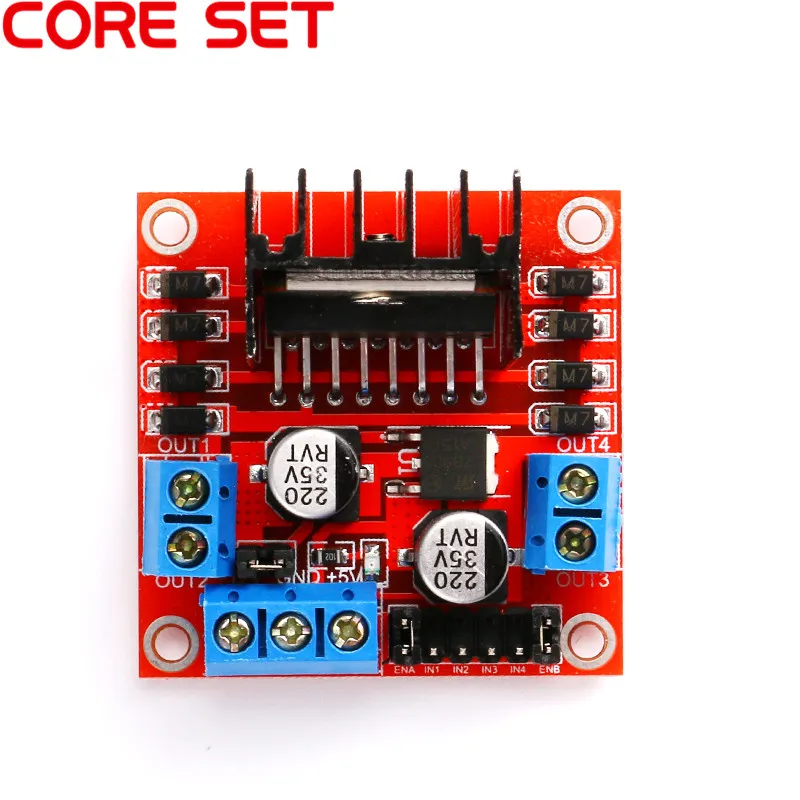 В данном примере рассматривается мост собранный на полупроводниках.
В данном примере рассматривается мост собранный на полупроводниках.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Подключение биполярного шагового двигателя к модулю L для управления через Raspberry Pi.
HIGH ждем 5 секунд. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
ШАГОВЫЙ ДВИГАТЕЛЬ ПРОСТОЙ ДРАЙВЕР ДЛЯ НЕГО
L298N, Arduino и двигатель постоянного тока
Активный — доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
Максимально допустимый ток для одного канала платы составляет 2А. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер.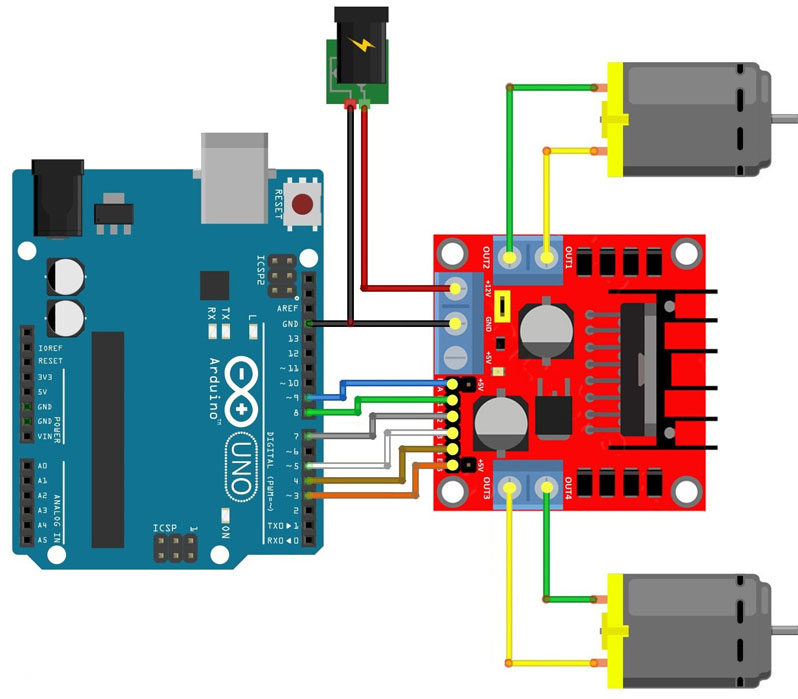 Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Иначе, при задании движения, например, по часовой стрелке, один из них будет вращаться в противоположном направлении. Управление может быть реализовано в активном или пассивном режимах.
Подключение двигателя производится к винтовым клеммным зажимам — по паре для питания каждого моторчика. Активный режим. Потенциометр кОм.
В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов.
Позволяет управлять двумя моторами постоянного тока, либо одним шаговым двигателем. Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Максимальное напряжение питания постоянным током 35 вольт. Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.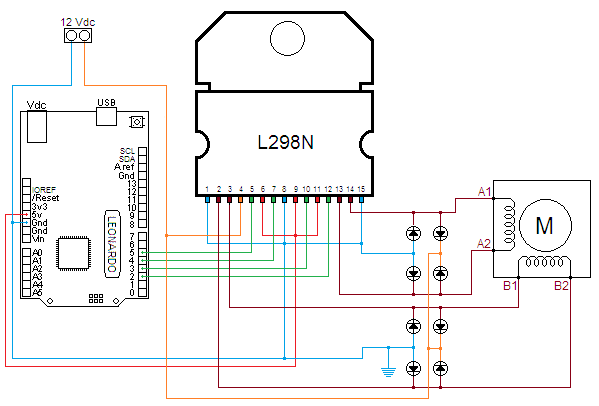
Применяя схему Н-моста для управления работой двигателя постоянного тока, вы сможете реализовать полный набор операций для электрической машины без необходимости переподключения ее выводов. Если джампер одет, то реализуется логика «пассивного» управления. После этого подключите источник питания. Активный режим.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше вот тут. Видео-демонстрация работы шагового двигателя: Заключение Надеюсь вы получили ответ на вопрос «что такое H-мост и как он работает», из экспериментов должно быть понятно как применять драйвер на микросхеме L и подключать к нему разные движки. В виду сложности подбора транзисторов и подключения их в схему Н-моста, гораздо проще использовать уже существующие драйвера, имеющие такую функцию. LOW Выходим из редактора и сохраняем файл.
Шаговый Двигатель Без Драйвера — Stepper Motor Run Without Driver
Драйверы двигателя L298N, L293D и Arduino Motor Shield
Драйвер двигателя выполняет крайне важную роль в проектах ардуино, использующих двигатели постоянного тока или шаговые двигатели.
Драйвер двигателя в проектах ардуино
Для чего нужен драйвер двигателя?
Как известно, плата ардуино имеет существенные ограничения по силе тока присоединенной к ней нагрузки. Для платы это 800 mA, а для каждого отдельного вывода – и того меньше, 40mA. Мы не можем подключить напрямую к Arduino Uno, Mega или Nano даже самый маленький двигатель постоянного тока. Любой из этих двигателей в момент запуска или остановки создаст пиковые броски тока, превышающие этот предел.
Как же тогда подключить двигатель к ардуино? Есть несколько вариантов действий:
Использовать реле. Мы включаем двигатель в отдельную электрическую сеть, никак не связанную с платой Arduino.
Использовать силовой транзистор. В данном случае мы можем управлять током, проходящим через двигатель, а значит, можем управлять скоростью вращения шпинделя. Но для смены направления вращения этот способ не подойдет.
Использовать специальную схему подключения, называемую H-мостом, с помощью которой мы можем изменять направление движения шпинделя двигателя. Сегодня можно без проблем найти как микросхемы, содержащие два или больше H-моста, так и отдельные модули и платы расширения, построенные на этих микросхемах.
В этой статье мы рассмотрим последний, третий вариант, как наиболее гибкий и удобный для создания первых роботов на ардуино.
Микросхема или плата расширения Motor Shield
Motor Shield – плата расширения для Ардуино, которая обеспечивает работу двигателей постоянного тока и шаговых двигателей. Самыми популярными платами Motor Shield являются схемы на базе чипов L298N и L293D, которые могут управлять несколькими двигателями. На плате установлен комплект сквозных колодок Ардуино Rev3, позволяющие устанавливать другие платы расширения. Также на плате имеется возможность выбора источника напряжения – Motor Shield может питаться как от Ардуино, так и от внешнего источника. На плате имеется светодиод, который показывает, работает ли устройство. Все это делает использование драйвера очень простым и надежным – не нужно самим изобретать велосипеды и решать уже кем-то решенные проблемы. В этой статье мы будем говорить именно о шилдах.
Принцип действия H-моста
Принцип работы драйвера двигателя основан на принципе работы H-моста. H-мост является электронной схемой, которая состоит из четырех ключей с нагрузкой.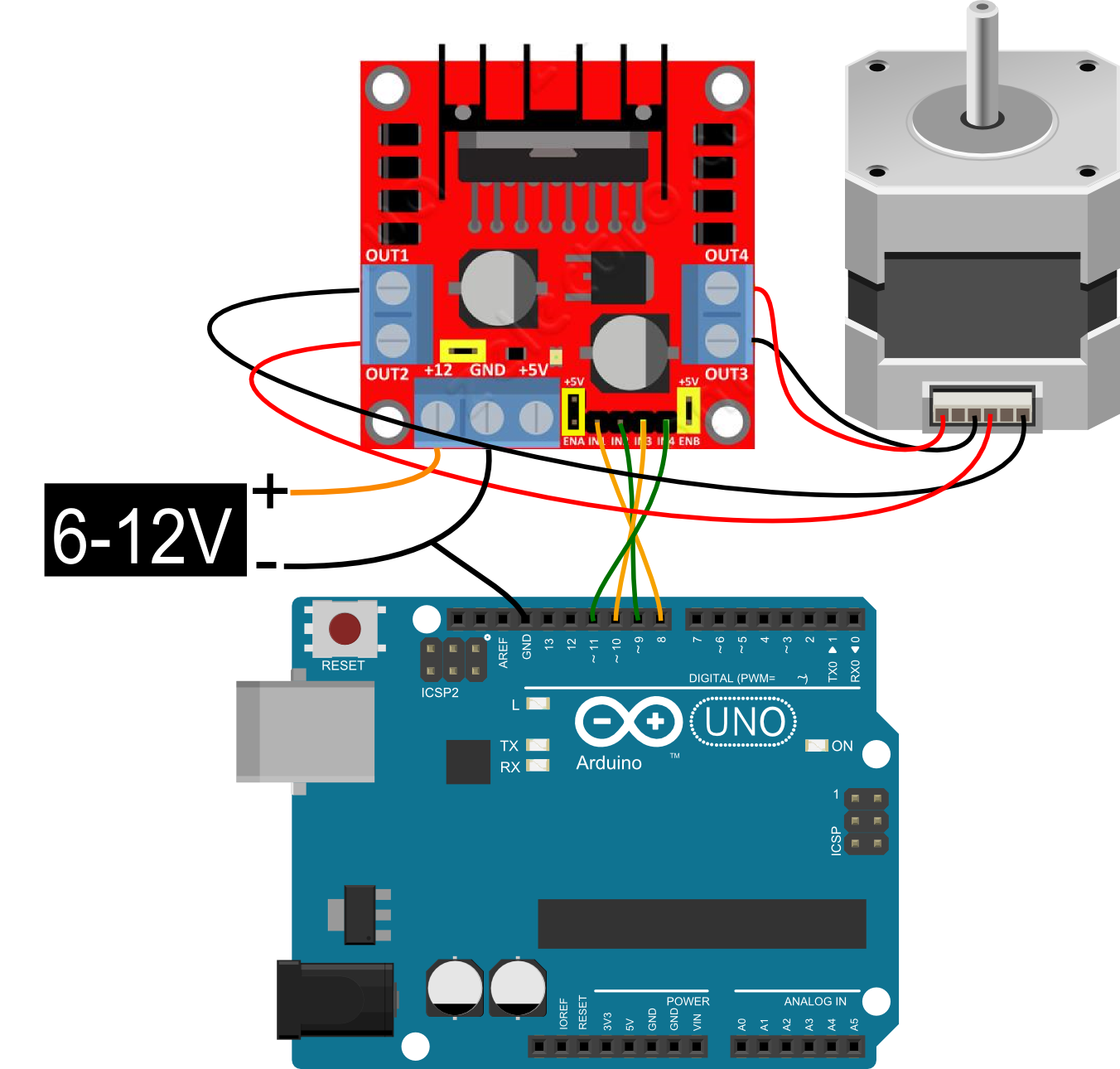 Название моста появилось из напоминающей букву H конфигурации схемы.
Название моста появилось из напоминающей букву H конфигурации схемы.
Схема моста изображена на рисунке. Q1…Q4 0 полевые, биполярные или IGBT транзисторы. Последние используются в высоковольтных сетях. Биполярные транзисторы практически не используются, они могут присутствовать в маломощных схемах. Для больших токов берут полевые транзисторы с изолированным затвором. Ключи не должны быть замкнуты вместе одновременно, чтобы не произошло короткого замыкания источника. Диоды D1…D4 ограничительные, обычно используются диоды Шоттки.
С помощью изменения состояния ключей на H-мосте можно регулировать направление движения и тормозить моторы. В таблице приведены основные состояния и соответствующие им комбинации на пинах.
| Q1 | Q2 | Q3 | Q4 | Состояние |
| 1 | 0 | 0 | 1 | Поворот мотора вправо |
| 0 | 1 | 1 | 0 | Поворот мотора влево |
| 0 | 0 | 0 | 0 | Свободное вращение |
| 0 | 1 | 0 | 1 | Торможение |
| 1 | 0 | 1 | 0 | Торможение |
| 1 | 1 | 0 | 0 | Короткое замыкание |
| 0 | 0 | 1 | 1 | Короткое замыкание |
Драйвер двигателя L298N
Модуль используется для управления шаговыми двигателями с напряжением от 5 до 35 В.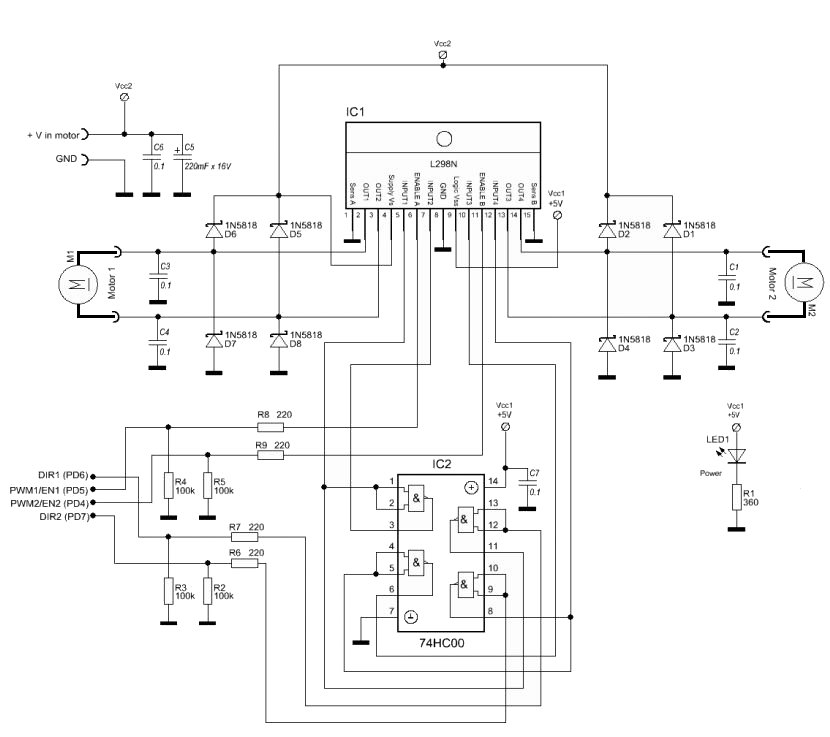 При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
При помощи одной платы L298N можно управлять сразу двумя двигателями. Наибольшая нагрузка, которую обеспечивает микросхема, достигает 2 А на каждый двигатель. Если подключить двигатели параллельно, это значение можно увеличить до 4 А.
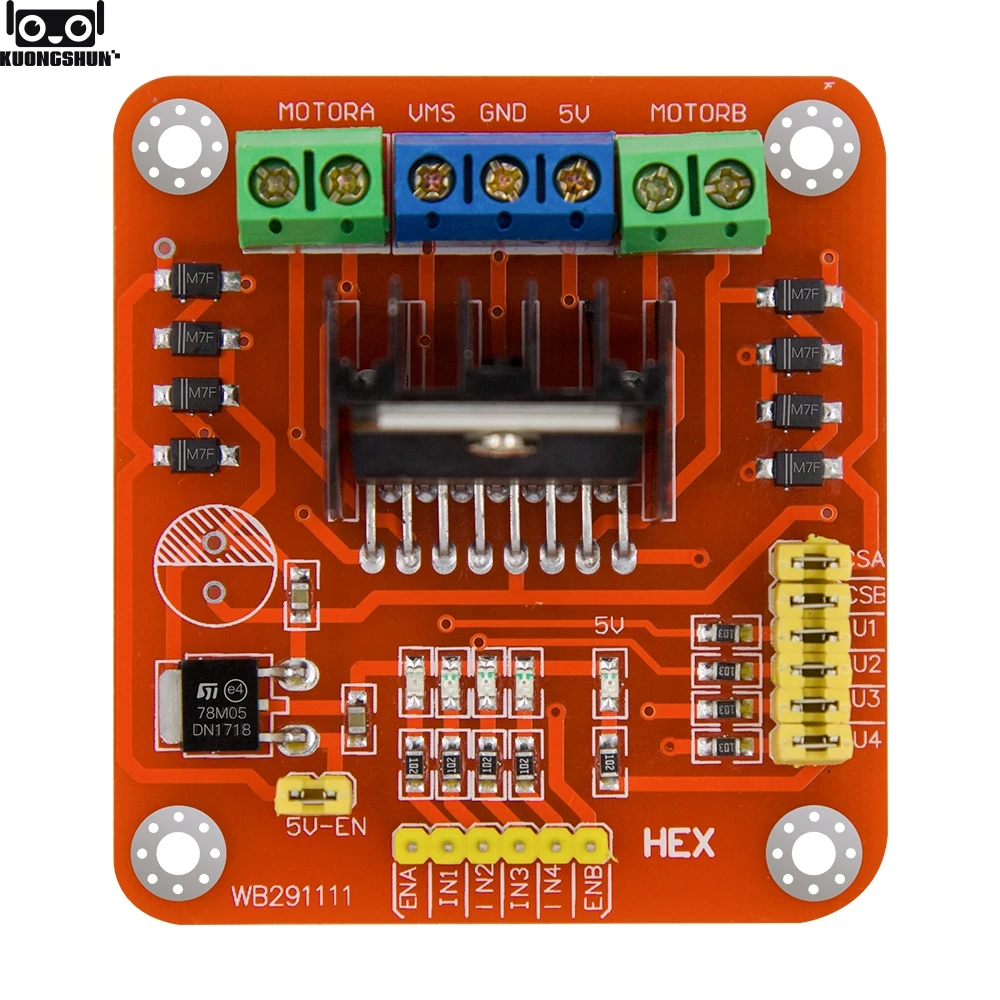
Плата выглядит следующим образом:
Распиновка микросхемы L298N:
- Vcc – используется для подключения внешнего питания;
- 5В;
- Земля GND;
- IN1, IN2, IN3, IN4 – используется для плавного управления скоростью вращения мотора;
- OUT1, OUT2 – используется для выхода с первого двигателя;
- OUT3, OUT4 – используется для выхода со второго двигателя;
- S1 – переключает питание схемы: от внешнего источника или от внутреннего преобразователя;
- ENABLE A, B – требуются для раздельного управления каналами. Используются в двух режимах – активный, при котором каналами управляет микроконтроллер и имеется возможность изменения скорости вращения, и пассивный, в котором невозможно управлять скоростью двигателей (установлено максимальное значение).
При подключении двух двигателей, нужно проверить, чтобы у них была одинаковая полярность. Если полярность разная, то при задании направления движения они будут вращаться в противоположные стороны.
Драйвер двигателя L293D
L293D – является самой простой микросхемой для работы с двигателями. L293D обладает двумя H-моста, которые позволяют управлять двумя двигателями. Рабочее напряжение микросхемы – 36 В, рабочий ток достигает 600 мА. На двигатель L293D может подавать максимальный ток в 1,2 А.
В схеме имеется 16 выходов. Распиновка:
- +V – питание на 5 В;
- +Vmotor – напряжение питания для мотором до 36 В;
- 0V – земля;
- En1, En2 –включают и выключают H-мосты;
- In1, In2 – управляют первым H-мостом;
- Out1, Out2 – подключение первого H-моста;
- In3, In4 – управляют вторым H-мостом;
- Out3, Out4 – подключение второго H-моста.
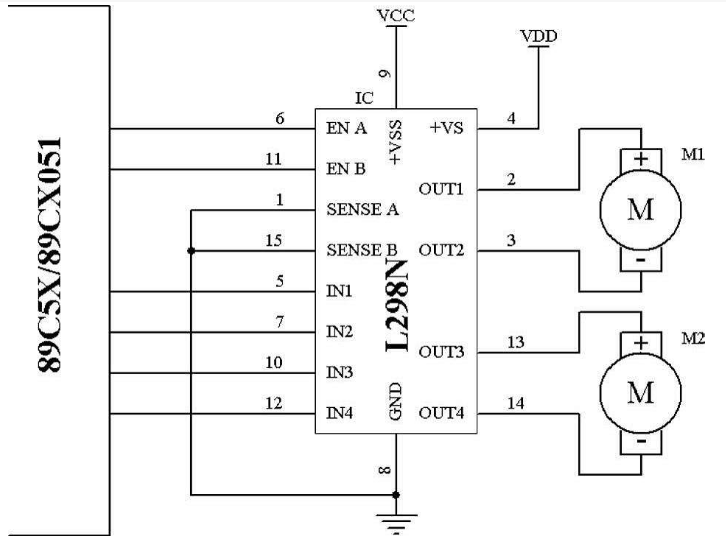
Для подключения к микроконтроллеру Arduino Uno нужно соединить выходы In1 на L293D и 7 пин на Ардуино, In2 – 8, In3 – 2, In4 – 3, En1 – 6, En2 – 5, V – 5V, Vmotor – 5 V, 0V – GND.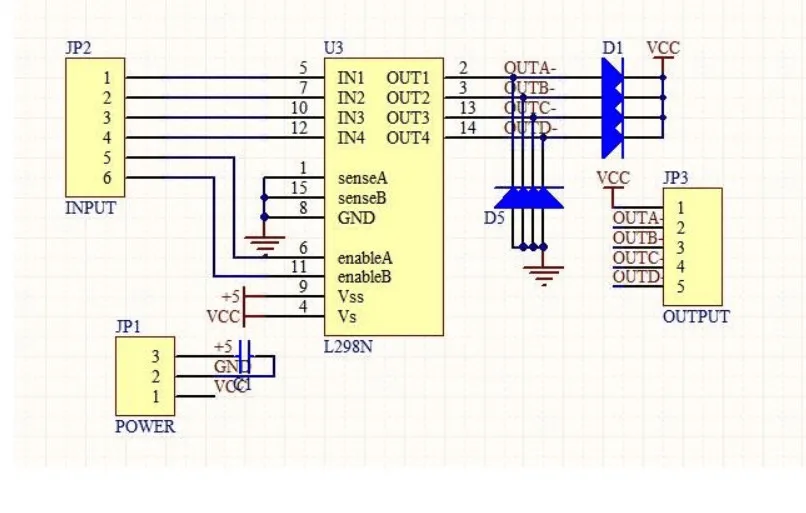 Пример подключения одного двигателя к Ардуино показан на рисунке.
Пример подключения одного двигателя к Ардуино показан на рисунке.
Драйвер двигателя на микросхеме HG7881
HG7881 – двухканальный драйвер, к которому можно подключить 2 двигателя или четырехпроводной двухфазный шаговый двигатель. Устройство часто используется из-за своей невысокой стоимости. Драйвер используется только для изменения направления вращения, менять скорость он не может.
Плата содержит 2 схемы L9110S, работающие как H-мост.
Характеристики драйвера HG7881:
- 4-контактное подключение;
- Питание для двигателей от 2,5 В до 12 В;
- Потребляемый ток менее 800 мА;
- Малые габариты, небольшой вес.
Распиновка:
- GND – земля;
- Vcc – напряжение питания 2,5В – 12В;
- A-IA – вход A(IA) для двигателя A;
- A-IB – вход B (IB) для двигателя A;
- B-IA – вход A(IA) для двигателя B;
- B-IB – вход B (IB) для двигателя B.
В зависимости от поданного сигнала на выходах IA и IB будет разное состояние для двигателей.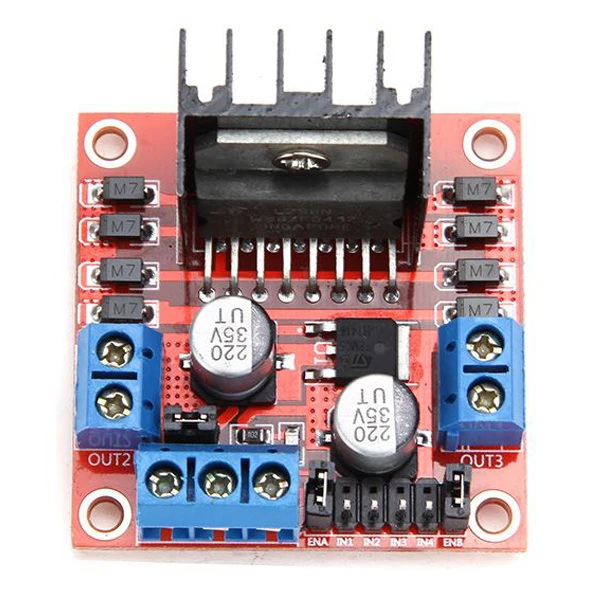 Возможные варианты для одного из моторов приведены в таблице.
Возможные варианты для одного из моторов приведены в таблице.
| IA | IB | Состояние мотора |
| 0 | 0 | Остановка |
| 1 | 0 | Двигается вперед |
| 0 | 1 | Двигается назад |
| 1 | 1 | Отключение |
Подключение одного двигателя к Ардуино изображено на рисунке.
Сравнение модулей
Модуль L293D подает максимальный ток в 1,2А, в то время как на L298N можно добиться максимального тока в 4 А. Также L293D обладает меньшим КПД и быстро греется во время работы. При этом L293D является самой распространенной платой и стоит недорого. Плата HG7881 отличается от L293D и L298N тем, что с ее помощью можно управлять только направлением вращения, скорость менять она не может. HG7881 – самый дешевый и самый малогабаритный модуль.
Подключение L298N к Arduino
Как уже упоминалось, в первую очередь нужно проверить полярность подключенных двигателей. Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Двигатели, вращающиеся в различных направлениях, неудобно программировать.
Нужно присоединить источник питания. + подключается к пину 4 на плате L298N, минус (GND) – к 5 пину. Затем нужно соединить выходы с L298N и пины на Ардуино, причем некоторые из них должны поддерживать ШИМ-модуляцию. На плате Ардуино они обозначены ~. Выходы с L298N IN1, IN2, IN3 и IN4 подключить к D7, D6, D5 и D4 на Ардуино соответственно. Подключение всех остальных контактов представлено на схеме.
Направление вращения задается с помощью сигналов HIGH и LOW на каждый канал. Двигатели начнут вращаться, только когда на 7 пине для первого мотора и на 12 пине для второго на L298N будет сигнал HIGH. Подача LOW останавливает вращение. Чтобы управлять скоростью, используются ШИМ-сигналы.
Для управления шаговым двигателем в Arduino IDE существует стандартная библиотека Stepper library. Чтобы проверить работоспособность собранной схемы, можно загрузить тестовый пример stepper_oneRevolution. При правильной сборке вал двигателя начнет вращаться.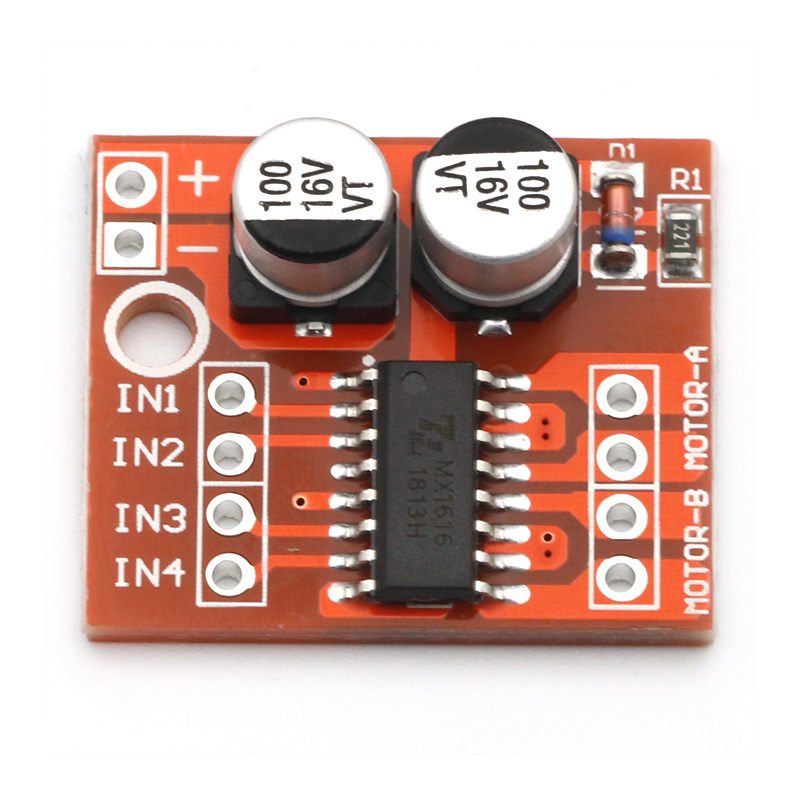
При работе с моторами Ардуино может периодически перезагружаться. Это возникает из-за того, что двигателям требуются большие токи при старте и в момент торможения. Для решения этой проблемы в плату встроены конденсаторы, диоды и другие схемы. Также для этих целей на шидле имеется раздельное питание.
L298N подключение к Ардуино — RadioRadar
Нет так давно мы рассматривали алгоритм сборки ЧПУ своими руками, где затрагивалась тема управления шаговыми двигателями, ведь именно они позволяют просто и точно спозиционировать фрезу в заданной точке.
Конечно, шаговые двигатели (ШД) используются не только в ЧПУ и 3D-принтерах, им есть масса и других применений. Например, вкупе с популярным «конструктором для взрослых», Arduino, на базе которого можно создать всё что угодно. Однако, связка «Ардуино – шаговый двигатель» требует дополнительный элемент – драйвер.
Из-за того, что двигатель требует повышенного напряжения и силы тока, непосредственное подключение его к микроконтроллеру невозможно, напряжения логического нуля в +5В и силы тока в 40 мА не хватит для работы любого шагового двигателя.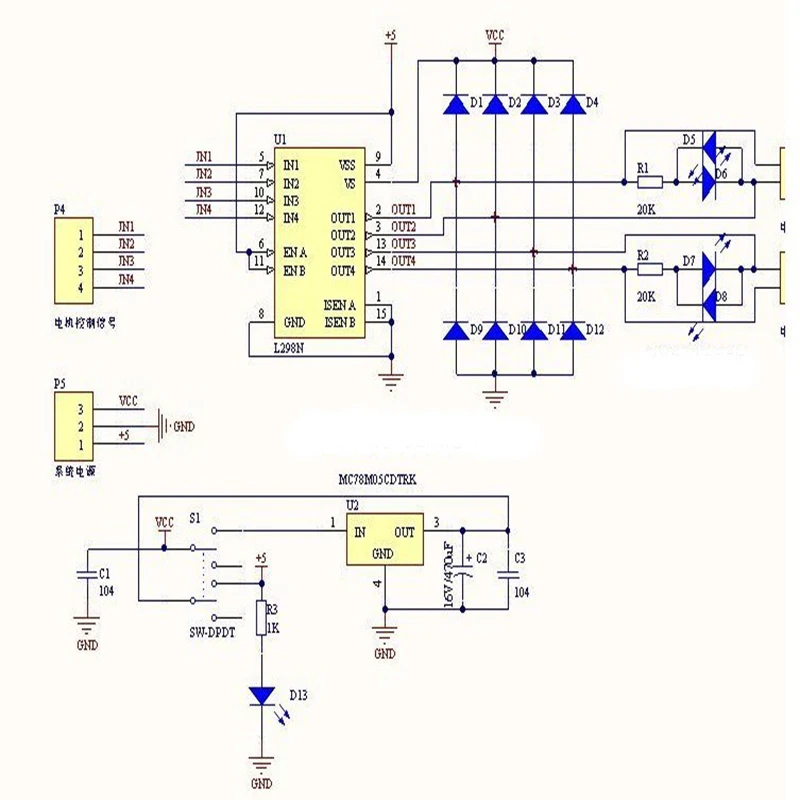 Функцию усилителя/переключателя берет на себя драйвер.
Функцию усилителя/переключателя берет на себя драйвер.
О нём мы и поговорим подробнее ниже.
L298N описание
Модуль L298N выполняет роль Н-моста (напряжение, прикладываемое к двигателю постоянного тока, может менять полярность для того, чтобы изменить направление вращения в противоположную сторону) и универсального драйвера для независимого управления сразу двумя двигателями постоянного тока или для одного шагового двигателя.
Модуль собирается на основе одноименной микросхемы (L298N).
К L298N можно подключить двигатели, питающиеся напряжением от 5 до 35 вольт. Управление может быть реализовано в активном или пассивном режимах.
1.Активный – доступно не просто включение и отключение вращения мотора, но и управление его скоростью.
2.Пассивный – контроллер будет понимать только логику «включить/выключить двигатель». Управление уровнем выходного напряжения будет недоступно.
L298N – это облегчённая версия платы L293D. По сравнению с последней на L298N отсутствуют защитные диоды (их можно установить самостоятельно при необходимости защиты от скачков тока в процессе пуска двигателей).
Подключение
Чтобы логика управления была понятнее, сначала разберёмся с джамперами и клеммами на плате.
Рис. 1. Джамперы и клеммы на плате
К клеммникам 1 и 2 подключаются двигатели, логика подключения зависит от моделей двигателей и логики их работы.
Блок клемм 3 отвечает за подключение питания двигателей. Первый контакт — +12. На него подаётся питание от 5 до 12 вольт, если джампер 3 одет, и от 12 до 35 воль, если джампер 3 снят.
При питании до +12В встроенный стабилизатор сам генерирует питание для логической части схемы, поэтому контакт +5В можно не использовать.
Если джампер 3 снят, то контакт +5В требуется запитать отдельно.
Управляющие сигналы от Ардуино или с другого микроконтроллера должны подаваться на контакты IN1-IN4, ENA, ENB. В зависимости от логических уровней и конфигурации джамперов 1,2 будет подаваться питание на двигатели/двигатель.
Джамперы 1 и 2 отвечают за переключение между активным и пассивным режимами работы драйвера.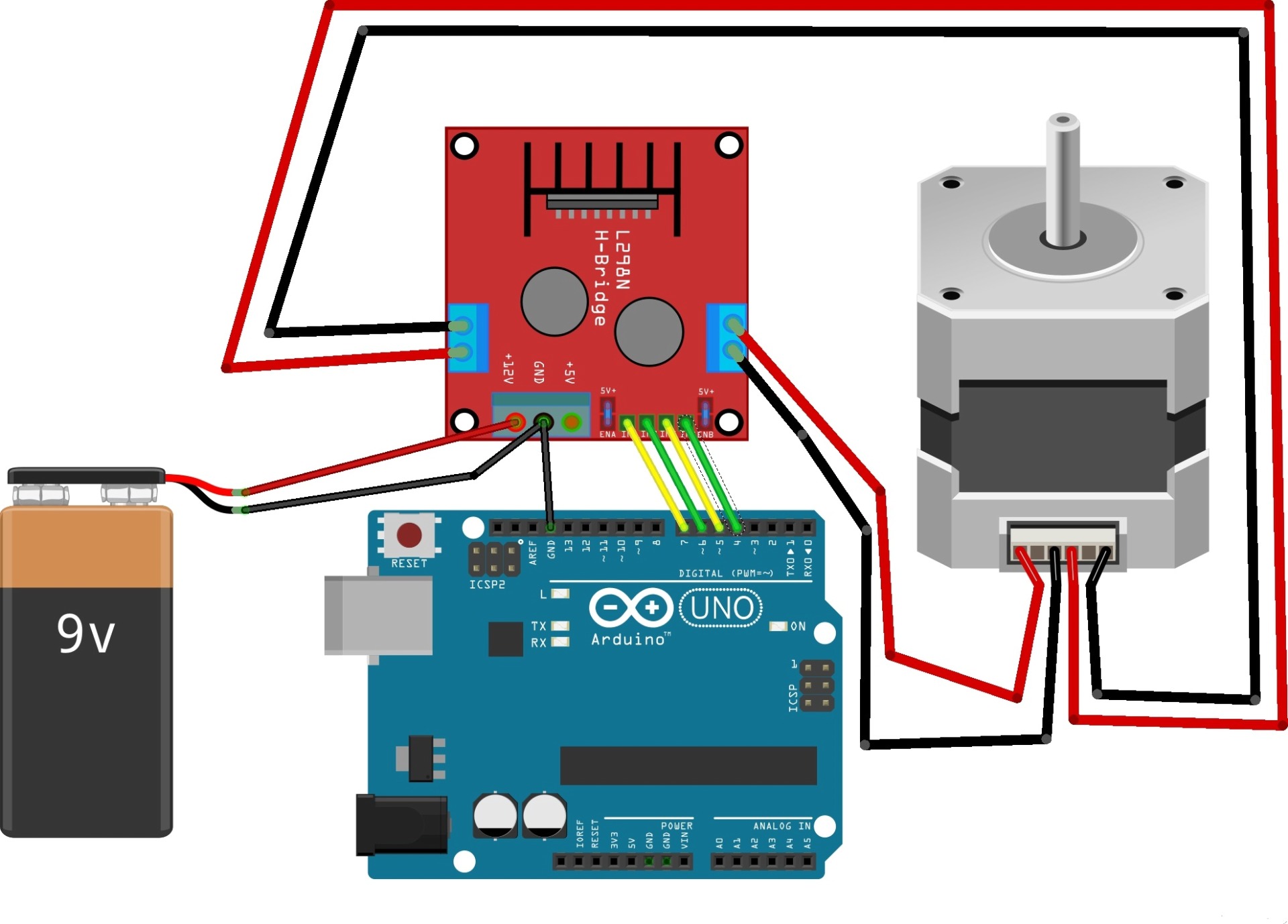 Если джампер одет, то реализуется логика «пассивного» управления.
Если джампер одет, то реализуется логика «пассивного» управления.
Теперь для наглядности рассмотрим пару реальных схем подключения.
Управление двумя двигателями постоянного тока
Схема соединения будет выглядеть следующим образом.
Рис. 2. Схема соединения
Напряжение питания двигателей ниже 12 вольт, значит джампер 3 установлен, джамперы 1 и 2 на контактах ENA и ENB сняты.
Стоит особое внимание уделить пинам на Ардуино с ШИМ-модуляцией (рядом с цифровым значением есть специальный символ «~»). Они необходимы для управления скоростью вращения вала (чем выше уровень напряжения, тем выше скорость).
Теперь о логике, на примере левого двигателя (см. изображение выше).
Таблица
Логический уровень на контакте ENA | Логический уровень на контакте IN1 | Логический уровень на контакте IN2 | Результат работы двигателя |
1 | 1 | 0 | Вращается по часовой стрелке |
1 | 0 | 1 | Вращается против часовой |
0 | 1 | 0 | Не вращается |
0 | 0 | 1 | Не вращается |
Логический уровень на контакте ENAЛогический уровень на контакте IN1Логический уровень на контакте IN2Результат работы двигателя
Получается, что контакт ENA отвечает за разрешение работы двигателя.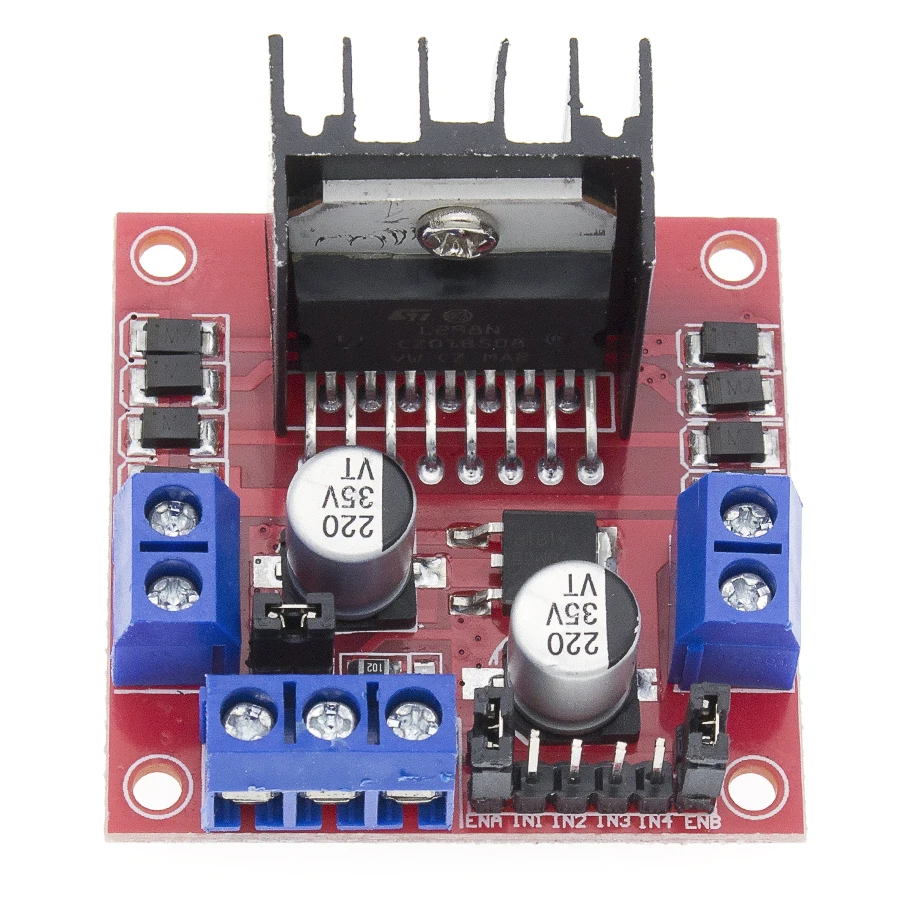 А от комбинации на входах IN1, IN2 зависит направление вращения.
А от комбинации на входах IN1, IN2 зависит направление вращения.
Если на контакт ENA подать не логическую единицу, а заданный уровень напряжения из доступного диапазона (0-255), то изменится скорость вращения.
Управление шаговым двигателем
Соединение схемы управления, включающей в себя драйвер, двигатель Nema17 и Arduino Nano, выглядит следующим образом.
Рис. 3. Соединение схемы управления,
Назначение контактов A+, A-, B+ и B- может отличаться на вашей модели привода, поэтому необходимо изучить документацию для определения правильного назначения.
Ввиду того, что логика работы данной схемы предполагает наличие на выходах только логических нулей и единиц, то джамперами 1 и 2 модуль L298N переключается в пассивный режим.
Скетч для работы с шаговым двигателем есть во встроенной библиотеке IDE для Ардуино (называется Stepper Library, найти её можно так — File -> Examples -> Stepper).
Константа stepsPerRevolution отвечает за количество шагов в одном обороте, по умолчанию установлено значение 200. Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Его необходимо изменить, если модель вашего двигателя имеет другой показатель.
Метод myStepper.setSpeed() отвечает за настройку скорости вращения, по умолчанию в скетче указан показатель 60, его можно изменить под свои требования.
Вызов функции, инициализирующей вращение, осуществляется через метод step с параметром stepsPerRevolution, при отрицательном параметре вращение осуществляется в обратную сторону.
Пример с использованием этой библиотеки можно найти ниже во вложениях. Полную документацию по API можно найти на официальном сайте проекта.
Скетчи двигателей постоянного тока и шаговых двигателей можно найти здесь.
Автор: RadioRadar
Корпус: Multiwatt15
| L2938N — представляет собой двойной мостовой драйвер для управления двунаправленными нагрузками с токами до 2А и напряжением от 4. В L298 существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи. Микросхемы L298N имеют встроенную защиту от перегрева. Выходы микросхемы отключаются при нагреве до температуры около +70°С. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Расположение выводов L298N: | Назначение выводов L298N:
Логическая таблица работы L298N
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Структурная схема L298N
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Предельно допустимые режимы L298
| Основные параметры L298:
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Типовые схемы использования драйвера L298N Использование внешних диодов для индуктивных нагрузок (моторов, реле, электромагнитов) обязательно! | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Управление однонаправленными двигателями
H — высокий уровень, L — низкий уровень, X — произвольно.
|
Управление двунаправленным двигателем
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Типовая схема управления шаговым двигателем с помощью комплекта микросхем L297 и L298N: (Рекомендуется использовать быстрые диоды с Tвосст.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Более подробное описание микросхемы L298N с электрическими характеристиками и диаграммами работы и схемами включения Вы можете получить скачав файл документации ниже (Datasheet на английском языке). | Ссылки: | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы.
5 V до 46 V. Микросхема разработана для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями. L298N имеет TTL совместимые входы.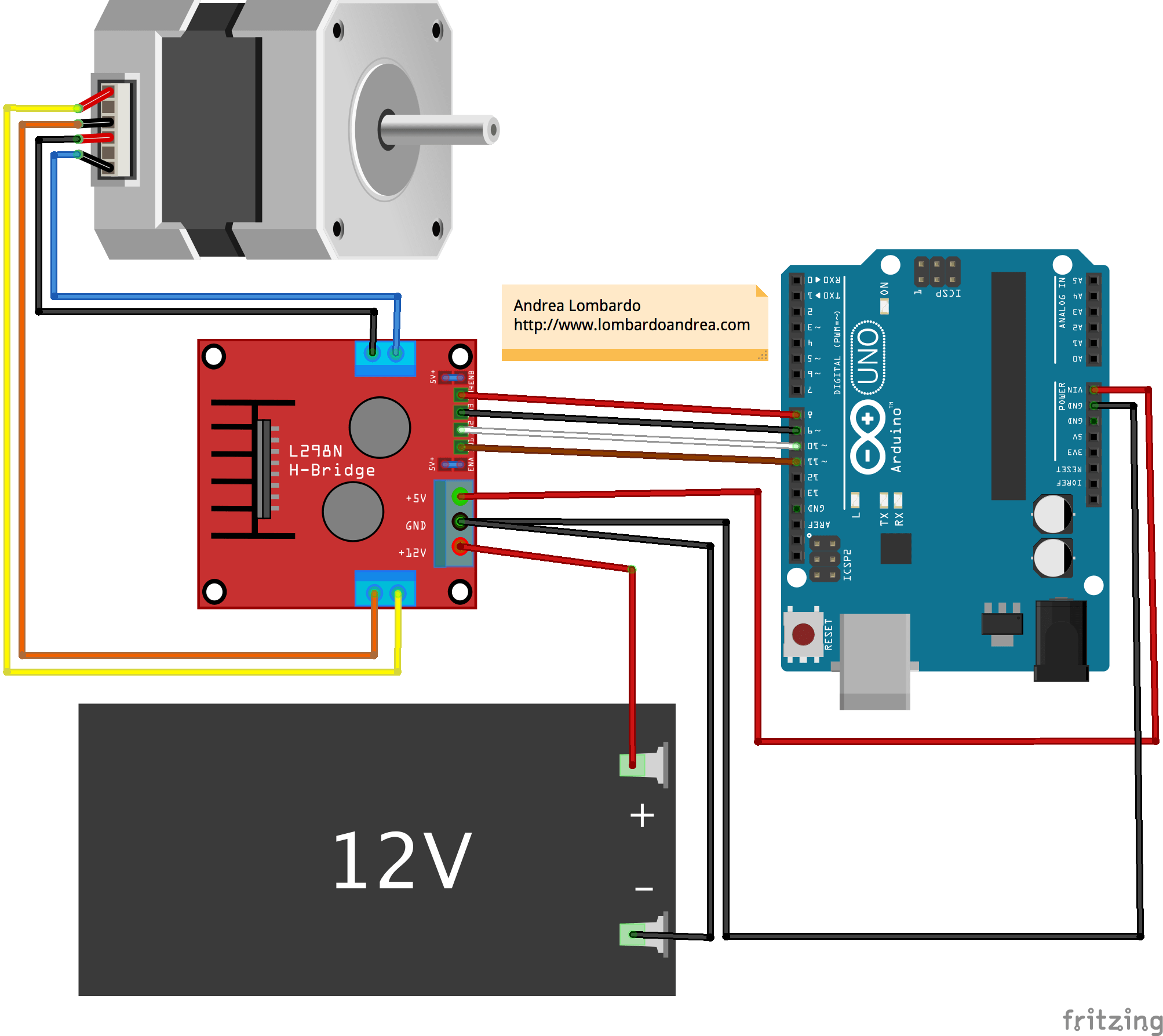 .7V
.7V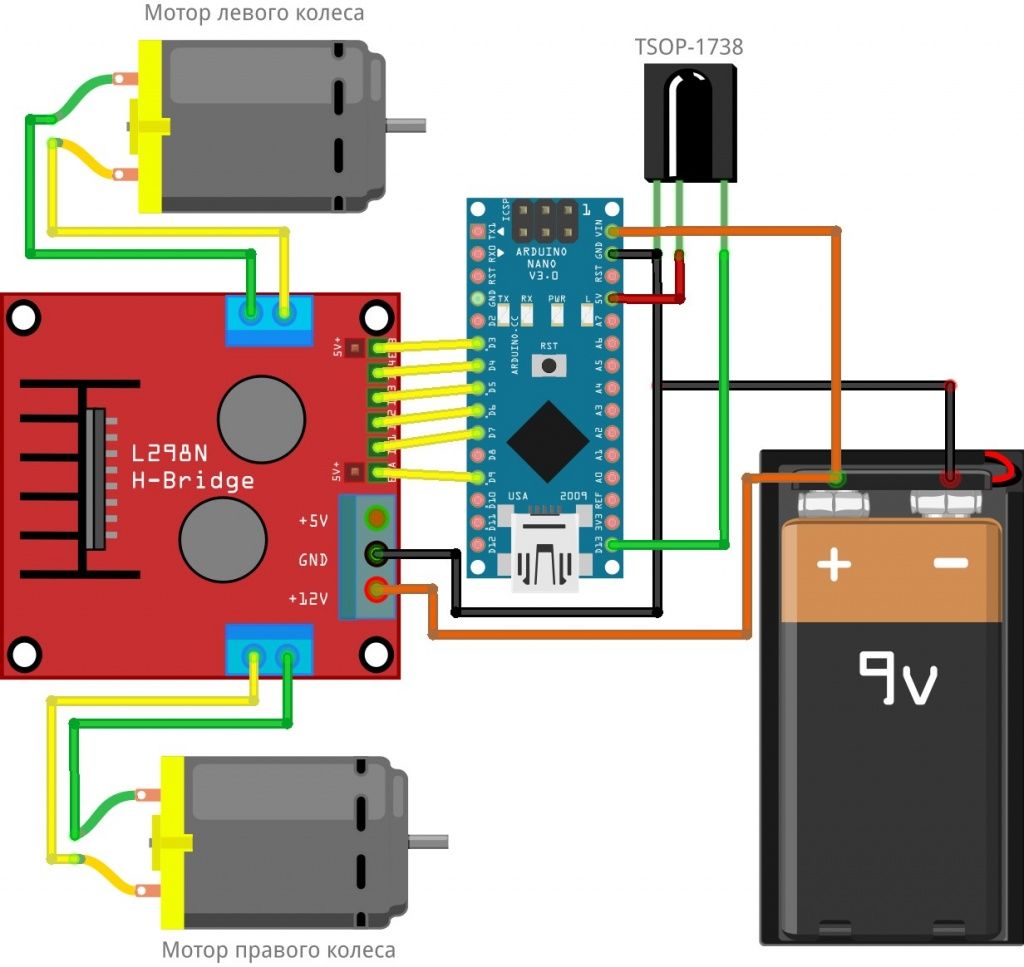 .3µA
.3µA
Turn: L298N принципиальная схема и реализация программы
В последнее время я занимаюсь слежением за автомобилем, и у двигателя возникли проблемы. Введение блогера о L298N очень хорошее.
Как использовать:
Выход A: выход канала A, подключенный к двигателю
Выход B: выход канала B, подключенный к двигателю
Источник питания 12 В: положительный вход основного источника питания
GND источника питания: вход положительного и отрицательного полюса основного источника питания
Выход 5 В: выходная клемма напряжения 5 В, может использоваться для подачи питания на MCU
ENA: канал A включен
ENB: канал B включен
IN1 ~ IN4: логический вход IN1IN2 контролирует канал A, логический вход IN3IN4 канал управления B
Встроенная перемычка на 5 В: после подключения действительный выход 5 В на борту
Во-вторых, фактическая схема подключения
В соответствии с вышеуказанными параметрами модуля:
Диапазон входного напряжения основного блока питания составляет + 5В ~ + 35В, если вы хотите подавать напряжение 5В через модуль для управления вашим MCU
Тогда диапазон входного напряжения основного источника питания составляет + 7В ~ + 35В.
1. Внутренний привод напряжения
Многие платы разработки будут иметь выходное напряжение 5 В и 3,3 В постоянного тока, которое можно использовать в качестве основного источника питания.
Зачем вам нужен модуль повышения?
Существует две причины: (1) Выходной порт 5 В платы разработки не обязательно имеет 5 В, может быть, только 4.
(2) Модуль не может двигаться только 5 В, у меня больше 5,3
2. Внешний драйвер питания
Этот метод требует, чтобы блок питания и MCU имели общую основу
3. Программный логический метод управления
51 Программирование:
Программирование Stm32:
1. Сначала настройте порт ввода-вывода
2. Как управлять 51 программой в stm32?
Сначала определите макрос
Так откуда же происходит PAout ()?
Информацию о сопоставлении адресов см. в процедуре точечного атома для конкретной реализации.
Четыре, общие проблемы:
1. Двигатель не вращается?
(1) Шум есть, но передача не вращается, возможно, напряжение недостаточно, увеличьте напряжение
(2) Произошла ошибка в проводке, нет общего заземления с MCU и т.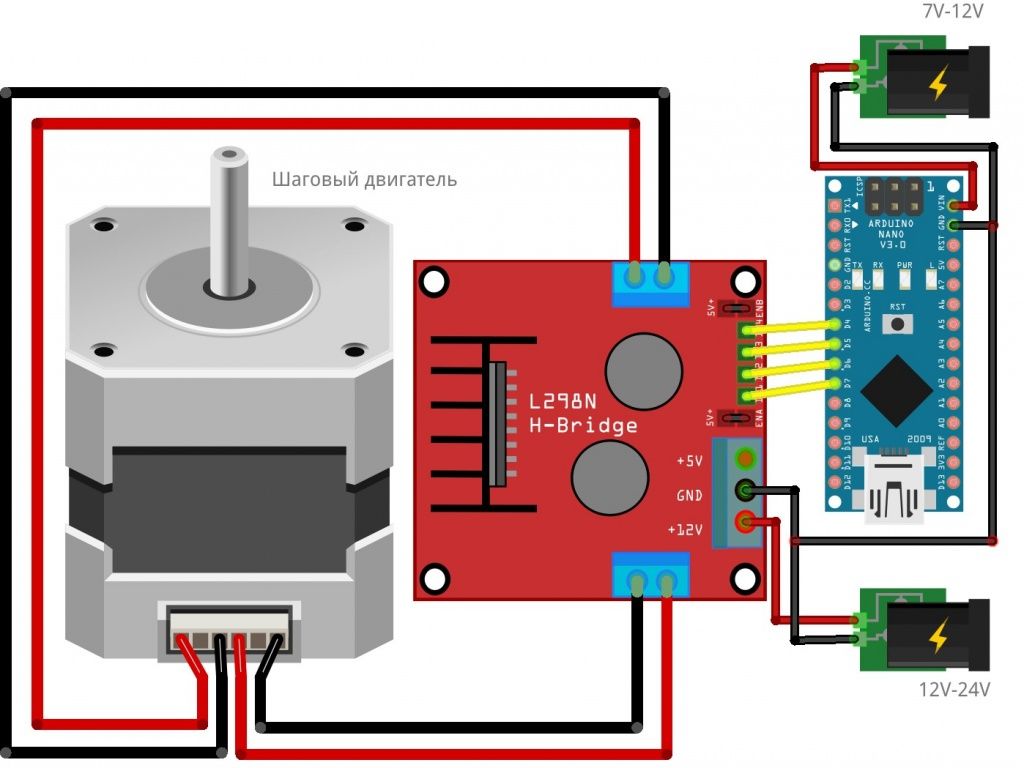 д.
д.
(3) Логический терминал запрограммирован неправильно и неправильно включен
2. Хотите снять заглушки на ENA и ENB?
Зависит от того, как ваша программа выводит волну ШИМ. Если она получает управление ШИМ через ENA, как в приведенной выше программе, крышка перемычки будет снята. Вывод ввода / вывода. Если он контролируется IN1 и IN2, нет необходимости выдвигать его.
Исходный код:https://download.csdn.net/download/p_xiaojia/10599257
Пример 27. Драйвер двигателей на L298N [База знаний]
// подключите пины контроллера к цифровым пинам Arduino
// первый двигатель
int enA = 9;
int in1 = 7;
int in2 = 6;
// второй двигатель
int enB = 3;
int in3 = 5;
int in4 = 4;
void setup()
{
// инициализируем все пины для управления двигателями как outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
// эта функция обеспечит вращение двигателей в двух направлениях на установленной скорости
void demoOne()
{
// запуск двигателя A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// устанавливаем скорость 100 из доступного диапазона 0~255
analogWrite(enA, 100);
// запуск двигателя B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// устанавливаем скорость 100 из доступного диапазона 0~255
analogWrite(enB, 100);
delay(2000);
// меняем направление вращения двигателей
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// выключаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
// эта функция обеспечивает работу двигателей во всем диапазоне возможных скоростей
void demoTwo()
{
// обратите внимание, что максимальная скорость определяется самим двигателем и напряжением питания
// ШИМ-значения генерируются функцией analogWrite()
// и зависят от вашей платы управления
// запускаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// ускорение от нуля до максимального значения
for (int i = 0; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// торможение от максимального значения к минимальному
for (int i = 255; i >= 0; —i)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// теперь отключаем моторы
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
demoOne();
delay(1000);
demoTwo();
delay(1000);
}
Arduino драйвер двигателя l298n
Автор: Сергей · Опубликовано 20. 12.2018 · Обновлено 14.10.2019
12.2018 · Обновлено 14.10.2019
Одним из самых простых и недорогх способов управления двигателями постоянного тока является модуль L298N Motor Driver с Arduino. Он может контролировать скорость и направление вращения двух двигателей постоянного тока, а так же управлять биполярным шаговым двигателем (типа NEMA 17).
Технические параметры► Напряжение питания логики модуля: 5 В
► Потребляемый ток встроенной логики: 36 мА
► Напряжение питания драйвера: 5 В – 35 В
► Рабочий ток драйвера: 2 А (пиковый ток 3 А)
► Габариты: 43.5 мм х 43.2мм х 29.4мм
Основной чип модуля это микросхема L298N, состоящая из двух H-мост (H-Bridge), один для выхода A, второй для выхода B. H-мост широко используется в электронике и служит для изменения вращения двигателем, схема H-моста содержит четыре транзистора (ключа) с двигателем в центре, образуя H-подобную компоновку. Принцип работы прост, при одновременном закрытие двух отдельных транзистора изменяется полярность напряжения, приложенного к двигателю. Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Это позволяет изменять направление вращения двигателя. На рисунке ниже, показана работа H-мостовой схемы.
Для управления скоростью двигателя постоянного тока используется метод PWM (Широко-импульсной модуляции).
Модуль L298N содержит разъем для подключения питания, ряд перемычек для настройки модуля, два выхода A и B и разъем управления, которые регулируют скорость и направление вращения, назначение каждого можно ознакомится ниже:
► Вывод Vss — питание двигателей, от 5 до 35 В;
► Вывод GND — общий вывод заземления;
► Вывод Vs — питание для логической схемы;
► Перемычка ENA — используются для управления скоростью двигателя A;
► Вывода IN1 и IN2 — используются для управления направлением вращения двигателя A;
► Вывода IN3 и IN4 — используются для управления направлением вращения двигателя B;
► Перемычка ENB — используются для управления скоростью двигателя B;
► Выходы OUT1 и OUT2 — разъем для двигателя A;
► Выходы OUT3 и OUT4 — разъем для двигателя B;
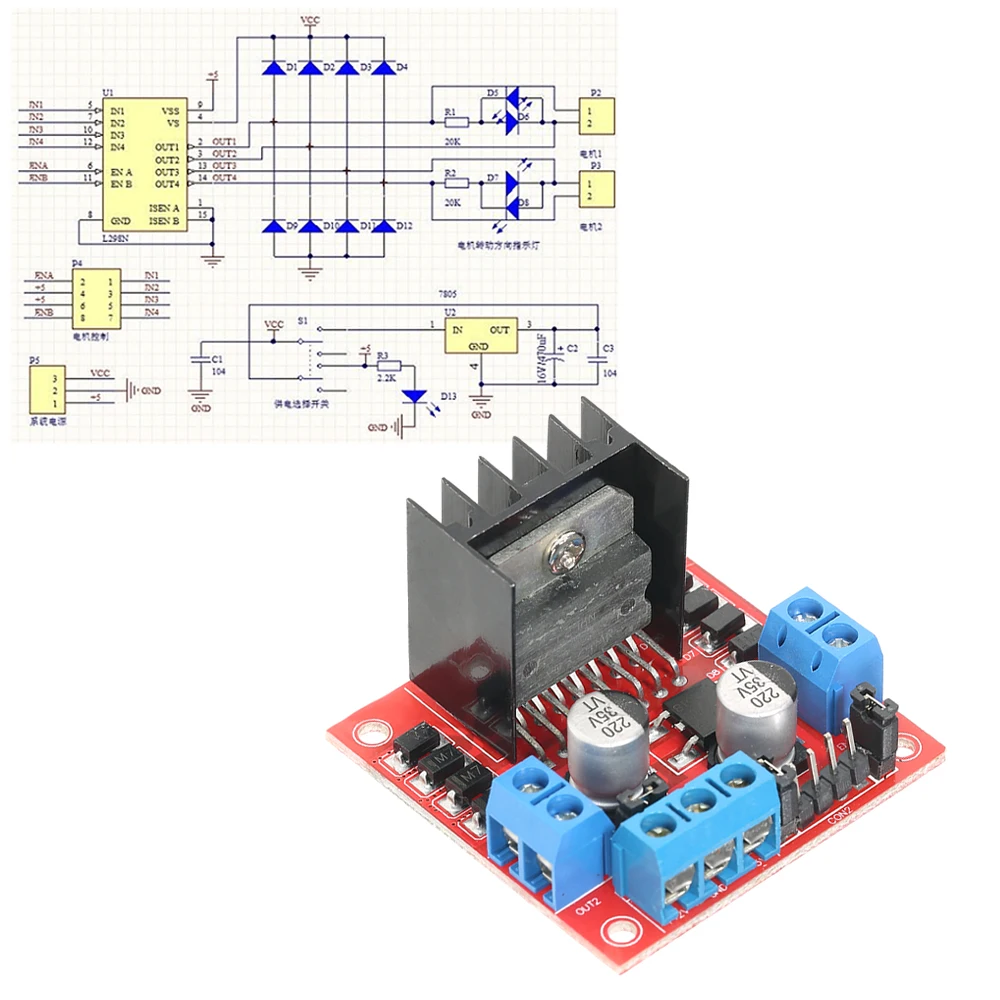
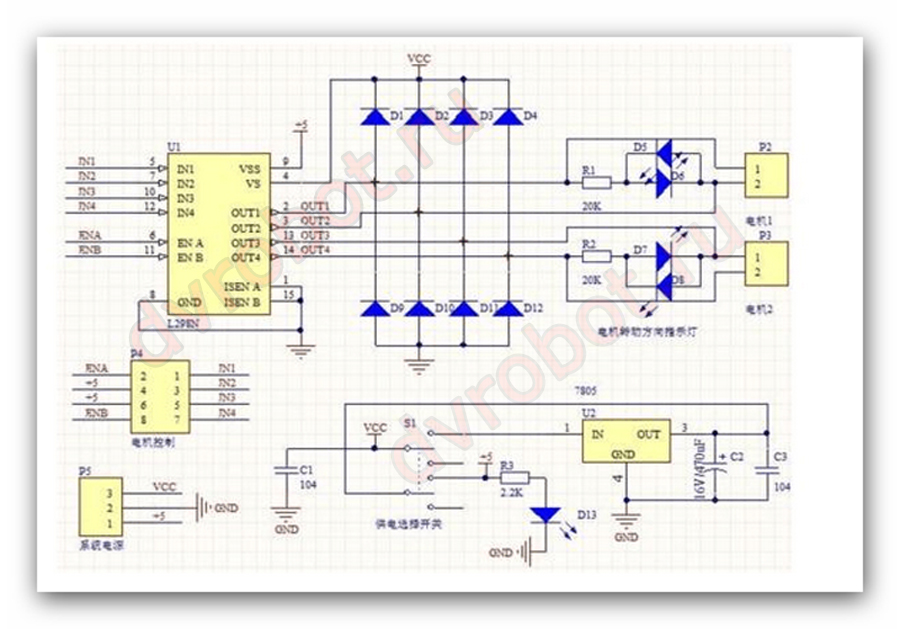
Принципиальная схема модуля L298N
Питание модуля.
Питание модуля L298N осуществляется через трех контактный разъем, шагом 3,5 мм:
► Vs — источник питания двигателей, 3B — 35B
► GND — земля
► Vss — источник питания модуля, 4,5В — 5,5В
Фактически у модуля L298N, есть два контакта питания, а именно. «Vss» и «Vs». От «Vs» питаются двигатели с допустимым напряжением от 5 В до 35 В, а от «Vss» питается логическая схема модуля 4,5В до 5,5В. На плате установлен встроенный стабилизатор напряжения на 5 Вольт (78M05), его можно включить или отключить с помощью перемычки. Когда перемычка установлена, стабилизатор включен и питает логику модуля (Vss) от источника питания двигателя (Vs). При включенном стабилизаторе, вход «Vss» работает как выход и обеспечивает 5В с током 0,5 А. Когда перемычка убрана, стабилизатор отключен и необходимо отдельно подключить питание 5 Вольт на вход Vss.
Внимание! Нельзя установить перемычку, если напряжение двигателя ниже 12 Вольт.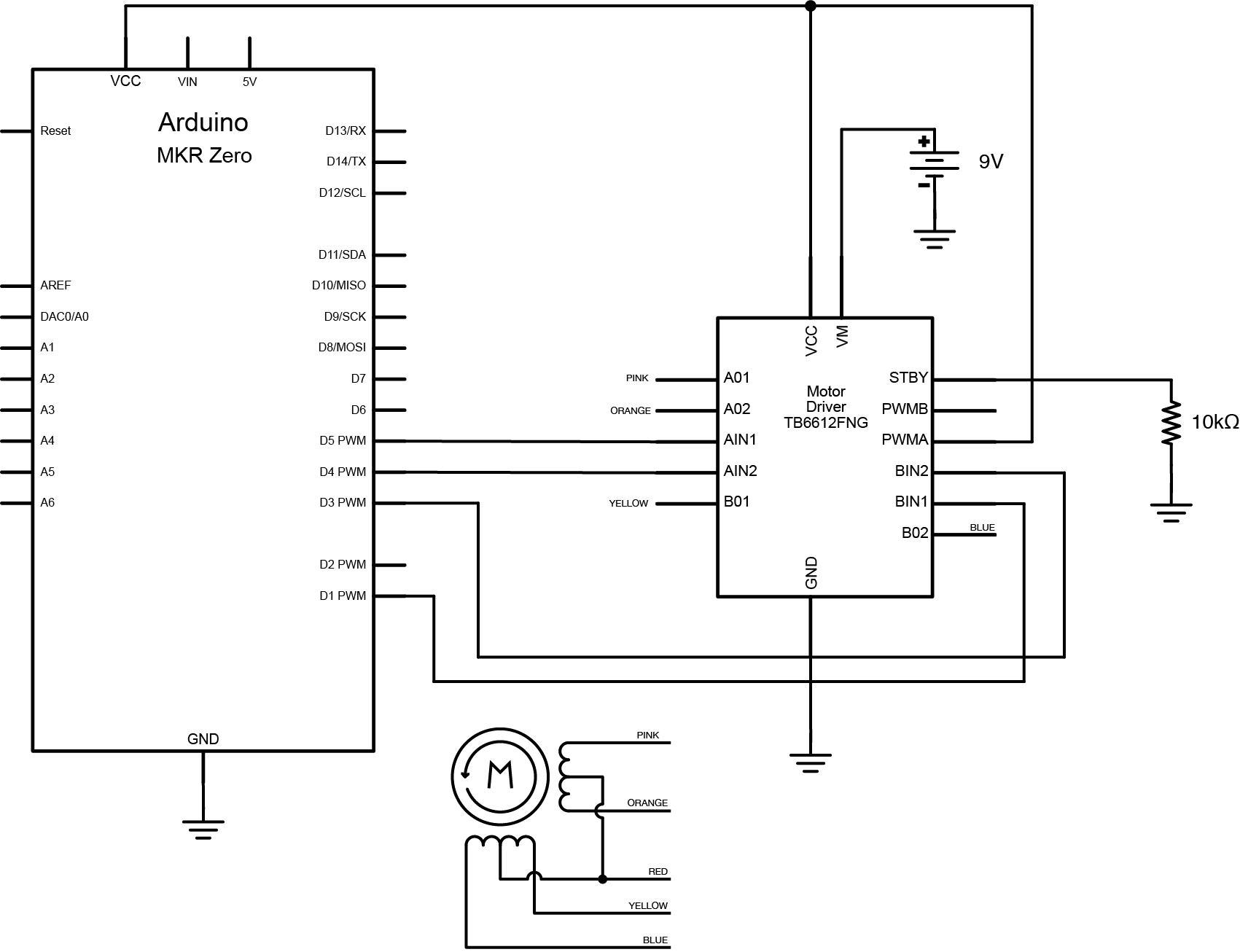
Падение напряжения L298N
Падение напряжения драйвера L298N составляет около 2 В, это связано с внутренним падением напряжения в транзисторах в цепи H-мосте. Таким образом, если мы подключим 12 В к источнику питания двигателя, то двигатели получат напряжение около 10 В. Это означает, что двигатель на 12 В не будет работать с максимальной скоростью, для получения максимальной скорости, напряжение поданное на двигателя должен быть выше напряжения (2 В), чем потребность в фактическом напряжении двигателя. Учитывая падение напряжения на 2 В, если вы используете двигатели 5 В, вам необходимо обеспечить питание 7 В. Если у вас 12-ваттные двигатели, то напряжение питания вашего двигателя должно составлять 14 В.
Управления скоростью
Разъемы управления скоростью ENA и ENB используются для включения и выключения управления скоростью двигателей. Когда перемычка установлена, двигатель вращается с максимальной скоростью. Если необходимо управлять скоростью двигателей, необходимо убрать перемычку и подключить выводы к контактам с поддержкой PWM на Arduino.
Необходимые детали:
► Arduino UNO R3 x 1 шт.
► Драйвер мотора на L298N (5-35V, 2A) x 1 шт.
► Коллекторный двигатель x 2 шт.
► Комплект проводов DuPont 2.54 мм, 20 см x 1 шт.
Подключение:
Первым делом необходимо подключить источник питания 12B к двигателям, в примере используется распространенные двигатель постоянного тока, рассчитанные на 3B . . . 12B (применяемые в робототехнике). Учитывая внутреннее падение напряжения на микросхеме L298N, двигатели получат 10 В и будут вращаться не в полную силу.
Далее, нужно подключить 5 вольт на логическую схему L298N, для этого воспользуемся встроенным стабилизатором напряжения, который работает от источника питания двигателя, поэтому, перемычка EN должна быть установлена.
Теперь осталось подключить управляющие провода ENA, IN1, IN2, IN3, IN4 и ENB к шести цифровым выводам Arduino 9, 8, 7, 5, 4 и 3. Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
Обратите внимание, что выводы Arduino 9 и 3 поддерживают ШИМ. Теперь, подключаем двигатели, один к клемме A (OUT1 & OUT2), а другой к клемме B (OUT3 & OUT4). Принципиальная схема подключения приведена ниже.
Осталось подключить Arduino к источнику питания и загрузить скетч.
Драйвер моторов на базе микросхемы L298N (RKP-MDL298-01A-V2 подробнее =>>) позволяет управлять двумя моторами постоянного тока либо шаговым двигателем с потребляемым током до 2 Ампер.
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы L298N собранный на платке в виде модуля.
В отличии от микросхемы L293D, в микросхеме L298N не встроены защитные диоды, их необходимо устанавливать в обвязку микросхемы дополнительно (8 штук по бокам).
По функционалу микросхема L298N полностью идентична микросхеме L293D. Мы видим те же управляющие выводы. Чередование разноименных сигналов (высокий логический уровень или низкий) на парах выводов IN1, IN2 и IN3, IN4 задают направление вращения моторов.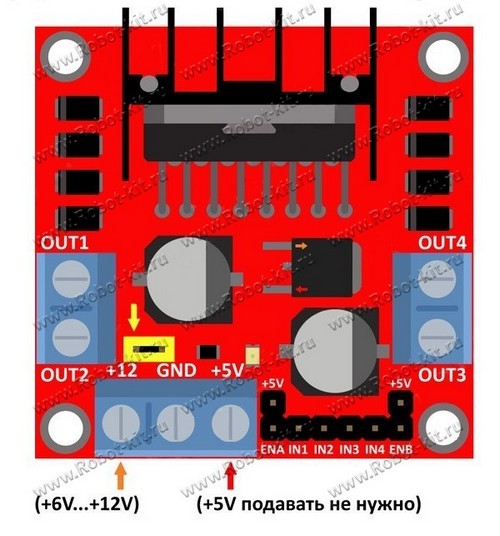
Выводы ENABLE A, B (ENA привязан к IN1, IN2. ENB к IN3, IN4) отвечают за раздельное управление каналами. Могут использоваться в двух режимах:
Условно «активном» режиме, когда ими будет управлять контроллер (рис. 1) – высокий логический уровень разрешает вращение моторов, низкий запрещает вне зависимости от состояния выводов «IN». Для регулировки скорости моторов, на «EN» выводы подается ШИМ (PWM) сигнал.
Условно «пассивном» режиме, просто притянув выводы «EN» к высокому уровню (+5V). Для этого на плате, рядом с выводами ENA и ENB находятся штырьки, соединенные с +5V. Замыкаем выводы с помощью джамперов (рис. 2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Для остановки нужно будет подавать одноименные сигналы на выводы «IN».
В программных кодах в продолжении статьи все будет прокомментировано.
Клеммник подачи питания и работа стабилизатора.
Разъем “+12V” предназначен для подачи питания на моторы и одновременно, при одетом джампере, подает питание на стабилизатор, который выдает +5V для питания логики драйвера.
Выходит, при таком варианте, не нужно тянуть лишний провод на разъем +5V.
Маркировка именно “+12V” связана с тем, что напряжение питания моторов может лежать в диапазоне от 5V до 35V, в то время как максимальное входное напряжение стабилизатора 12V. То есть, при одетом джампере, подача свыше 12V может спалить стабилизатор.
Как мы уже поняли, маркировка “+12V” носит предупредительно-информативный характер.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер.
Теперь напряжение не поступает на стабилизатор и не сможет повредить его, но теперь необходимо подать внешнее +5V.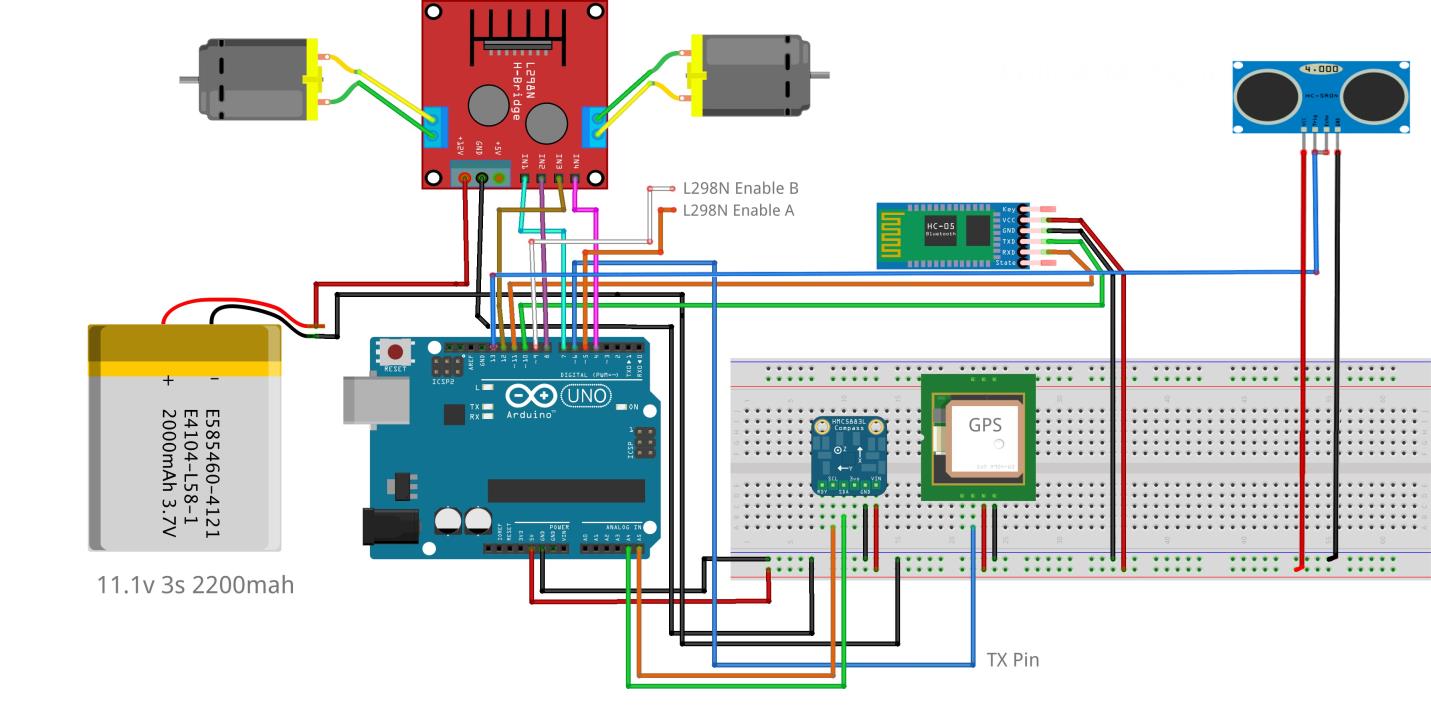 Подключение моторов к модулю L298N
Подключение моторов к модулю L298N
Начнем с подключения одного мотора, с притянутым к +5V выводом ENB.
Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.5 секунды, вращаться «влево» 4 секунды, остановка 5 секунд и снова цикл повторяется.
Пример программного кода
В данном примере мы подсоединили ENB к выводу ШИМ (D3), и задействуем возможность драйвера управлять скоростью, меняя скважность посылаемого ШИМ сигнала. Значения скважности задаются функцией analogWrite (pin, число) , где число изменяется от 0 до 255, прямо пропорционально скважности сигнала. Для наглядности, подобраны четыре значения, при которых двигатель стартует с низких оборотов, набирает средние, выходит на максимальные и не вращается.
Пример программного кода Ну и напоследок подключим два двигателя с регулировкой скорости.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости.
Драйвер моторов на базе микросхемы L298N (RKP-MDL298-01A-V2 подробнее =>>) позволяет управлять двумя моторами постоянного тока либо шаговым двигателем с потребляемым током до 2 Ампер.
В данной же статье мы рассмотрим драйвер двигателей базе микросхемы L298N собранный на платке в виде модуля.
В отличии от микросхемы L293D, в микросхеме L298N не встроены защитные диоды, их необходимо устанавливать в обвязку микросхемы дополнительно (8 штук по бокам).
По функционалу микросхема L298N полностью идентична микросхеме L293D. Мы видим те же управляющие выводы. Чередование разноименных сигналов (высокий логический уровень или низкий) на парах выводов IN1, IN2 и IN3, IN4 задают направление вращения моторов.
Выводы ENABLE A, B (ENA привязан к IN1, IN2. ENB к IN3, IN4) отвечают за раздельное управление каналами. Могут использоваться в двух режимах:
Условно «активном» режиме, когда ими будет управлять контроллер (рис. 1) – высокий логический уровень разрешает вращение моторов, низкий запрещает вне зависимости от состояния выводов «IN». Для регулировки скорости моторов, на «EN» выводы подается ШИМ (PWM) сигнал.
Условно «пассивном» режиме, просто притянув выводы «EN» к высокому уровню (+5V). Для этого на плате, рядом с выводами ENA и ENB находятся штырьки, соединенные с +5V. Замыкаем выводы с помощью джамперов (рис. 2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Для остановки нужно будет подавать одноименные сигналы на выводы «IN».
Для этого на плате, рядом с выводами ENA и ENB находятся штырьки, соединенные с +5V. Замыкаем выводы с помощью джамперов (рис. 2). В данном режиме мы не сможем регулировать скорость двигателей, они будут всегда вращаться в полную скорость (за то для управления экономится 2 вывода контроллера). Направление вращения будет задаваться по-прежнему, а вот для остановки в данном варианте, состояние выводов будет уже играть роль. Для остановки нужно будет подавать одноименные сигналы на выводы «IN».
В программных кодах в продолжении статьи все будет прокомментировано.
Клеммник подачи питания и работа стабилизатора.
Разъем “+12V” предназначен для подачи питания на моторы и одновременно, при одетом джампере, подает питание на стабилизатор, который выдает +5V для питания логики драйвера.
Выходит, при таком варианте, не нужно тянуть лишний провод на разъем +5V.
Маркировка именно “+12V” связана с тем, что напряжение питания моторов может лежать в диапазоне от 5V до 35V, в то время как максимальное входное напряжение стабилизатора 12V. То есть, при одетом джампере, подача свыше 12V может спалить стабилизатор.
То есть, при одетом джампере, подача свыше 12V может спалить стабилизатор.
Как мы уже поняли, маркировка “+12V” носит предупредительно-информативный характер.
При напряжении питания свыше 12V, без опаски подвеем нужное напряжение на данный вывод, но не забываем снять джампер.
Теперь напряжение не поступает на стабилизатор и не сможет повредить его, но теперь необходимо подать внешнее +5V. Подключение моторов к модулю L298N
Начнем с подключения одного мотора, с притянутым к +5V выводом ENB.
Заставим моторчик вращаться «вправо» 4 секунды, остановиться на 0.5 секунды, вращаться «влево» 4 секунды, остановка 5 секунд и снова цикл повторяется.
Пример программного кода
В данном примере мы подсоединили ENB к выводу ШИМ (D3), и задействуем возможность драйвера управлять скоростью, меняя скважность посылаемого ШИМ сигнала. Значения скважности задаются функцией analogWrite (pin, число) , где число изменяется от 0 до 255, прямо пропорционально скважности сигнала. Для наглядности, подобраны четыре значения, при которых двигатель стартует с низких оборотов, набирает средние, выходит на максимальные и не вращается.
Для наглядности, подобраны четыре значения, при которых двигатель стартует с низких оборотов, набирает средние, выходит на максимальные и не вращается.
Пример программного кода Ну и напоследок подключим два двигателя с регулировкой скорости.
В приведенном ниже скетче два мотора будут вращаться в обе стороны с плавным нарастанием скорости.
L298N Схема расположения выводов модуля драйвера двигателя, техническое описание, характеристики и характеристики
L298N Модуль драйвера двигателя
L298N Модуль драйвера двигателя
L298N Модуль драйвера двигателя
Распиновка модуля драйвера двигателя L298N
нажмите на картинку для увеличения
Этот модуль драйвера двигателя L298N представляет собой модуль драйвера двигателя высокой мощности для управления двигателями постоянного тока и шаговыми двигателями.Этот модуль состоит из микросхемы драйвера двигателя L298 и регулятора 5V 78M05. L298N Модуль может управлять 4 двигателями постоянного тока или 2 двигателями постоянного тока с контролем направления и скорости.
L298N Модуль может управлять 4 двигателями постоянного тока или 2 двигателями постоянного тока с контролем направления и скорости.
L298N Конфигурация выводов модуля:
Имя контакта | Описание |
IN1 и IN2 | Входные контакты двигателя А.Используется для управления направлением вращения двигателя A |
IN3 и IN4 | Входные контакты двигателя B. Используется для управления направлением вращения двигателя B |
ENA | Включает сигнал ШИМ для двигателя A |
ENB | Включает сигнал ШИМ для двигателя B |
OUT1 и OUT2 | Выходные контакты двигателя A |
OUT3 и OUT4 | Выходные контакты двигателя B |
12В | Вход 12 В от источника постоянного тока |
5 В | Подает питание для логической схемы переключения внутри L298N IC |
GND | Штырь заземления |
- Модель драйвера: L298N 2A
- Чип драйвера: двойной H-мост L298N
- Напряжение питания двигателя (максимальное): 46 В
- Ток питания двигателя (максимальный): 2A
- Логическое напряжение: 5 В
- Напряжение драйвера: 5-35 В
- Ток драйвера: 2А
- Логический ток: 0-36 мА
- Максимальная мощность (Вт): 25 Вт
- Чувствительность по току для каждого двигателя
- Радиатор для повышения производительности
- Светодиодный индикатор включения питания
Модули альтернативного драйвера: TMC2209, DRV8825, A4988, L9110S, DRV8711
Сопутствующие компоненты: ИС драйвера двигателя LM298, регулятор напряжения 78M05, конденсаторы, резисторы, радиатор
Краткое описание модуля L298N
Модуль драйвера двигателя L298N состоит из ИС драйвера двигателя L298, регулятора напряжения 78M05, резисторов, конденсатора, светодиода питания и перемычки 5 В в интегральной схеме.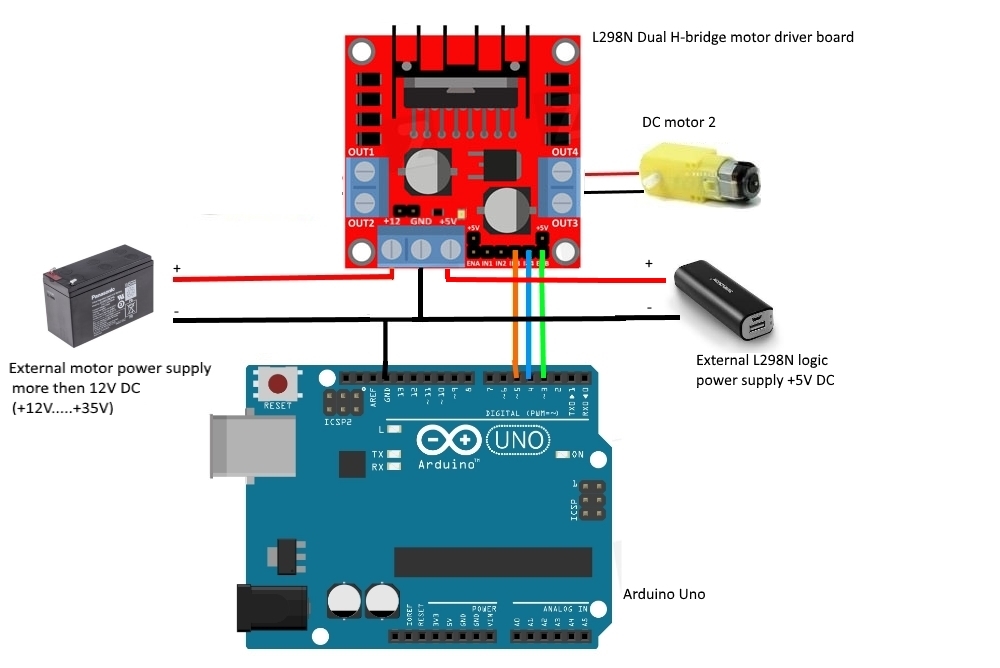
78M05 Регулятор напряжения будет включен только при установке перемычки. Когда источник питания меньше или равен 12 В, тогда внутренняя схема будет получать питание от регулятора напряжения, а вывод 5 В может использоваться как выходной вывод для питания микроконтроллера. Перемычку нельзя устанавливать, когда напряжение питания превышает 12 В, а отдельные 5 В должны подаваться через клемму 5 В для питания внутренней схемы.
Контакты ENA и ENB — это контакты управления скоростью для двигателя A и двигателя B, в то время как IN1 и IN2 и IN3 и IN4 являются контактами управления направлением для двигателя A и двигателя B.
Внутренняя принципиальная схема модуля драйвера двигателя L298N приведена ниже:
Применение модуля L298N- Приводные двигатели постоянного тока.
- Приводные шаговые двигатели
- В робототехнике
Код 404 страница не найдена. К сожалению, страница отсутствует или перемещена. К сожалению, страница отсутствует или перемещена.Ниже приведены основные подразделы этого сайта.
»Главная
» Электронное письмо
»Пожертвовать
» Преступление
»Электроника для хобби »Архив 1
»Архив 2
»Архив 3
»Архив 4
»Архив 5 Веб-сайт Авторские права Льюис Лофлин, Все права защищены. |
 :
:A Dual Full Bridge Driver [FAQ]
L298 Описание
L298 представляет собой интегрированную монолитную схему в 15-выводных корпусах Multiwatt и PowerSO20. Это высоковольтный, сильноточный двойной полномостовой драйвер, предназначенный для работы со стандартными логическими уровнями TTL и управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели.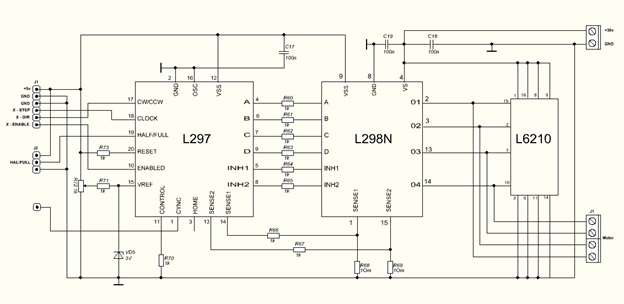 Предусмотрены два входа для включения или отключения устройства независимо от входных сигналов.
Предусмотрены два входа для включения или отключения устройства независимо от входных сигналов.
Чаще всего используются:
- , когда необходимо управлять различными нагрузками, такими как двигатели, соленоид и т. Д., Когда требуется H-образный мост
- , когда требуется драйвер двигателя высокой мощности
- , когда блок управления может обеспечивать только выходы TTL
- , когда требуется одночиповое устройство управления током и ШИМ-управлением
Каталог
L298 Принципиальная схема
L298 Характеристики и характеристики
- Рабочее напряжение питания до 46 В
- Полный постоянный ток до 4 А
- Номинальная мощность 25 Вт
- 2 включает клеммы управления для включения или устройства без ввода сигналов.
- Может управлять двухфазным шаговым двигателем, четырехфазным шаговым двигателем или двумя двигателями постоянного тока
- Низкое напряжение насыщения
- Защита от перегрева
- Входное напряжение логического «0» до 1,5 В (высокая помехозащищенность)
- Рабочая температура: от -23 ° C до 130 ° C
- Температура хранения: от -40 ° C до 150 ° C
Конфигурация и функции выводов L298
Назначение выводов:
L298 Описание корпуса и механические характеристики
Где использовать L298 IC
Вот несколько областей, где L298 предпочтительнее:
- L298 в основном используется там, где требуется H-BRIDGE .

- Если требуется привод двигателя высокой мощности. В маркировке есть H-мосты, такие как L293, которые используются для приложений с низким энергопотреблением, в то время как L298 специально разработан для приложений с высоким энергопотреблением.
- Где требуется одночиповое устройство управления током и ШИМ.
- Чип предпочтительнее, когда блок управления может обеспечивать только выход TTL
Также для работы микросхема не требует установки каких-либо дополнительных компонентов.
Как использовать L298 IC
Чтобы понять работу L298 IC, рассмотрим простую конфигурацию схемы, показанную ниже.
Здесь мы используем один из H-МОСТОВ микросхемы l298. Как показано на схеме, у нас есть две кнопки Q1 и Q2, которые действуют как управляющие входы для моста-A. Эти логические входы предоставляются микроконтроллером или микропроцессором в схемах приложения. Четыре диода являются обратными диодами, используемыми для защиты ИС от индуктивных всплесков напряжения. Контакт включения подтянут через резистор, поэтому мост-A будет работать все время. Если его подтянуть к земле, мост-A будет отключен независимо от логики управления входом.
Контакт включения подтянут через резистор, поэтому мост-A будет работать все время. Если его подтянуть к земле, мост-A будет отключен независимо от логики управления входом.
После того, как вся схема настроена, нам нужно нажать кнопки Q1 и Q2, чтобы изменить ток между контактами OUT1 и OUT2. Таблица логического управления приведена ниже.
ВХОДЫ | НАЗНАЧЕНИЕ |
Q1 = ВЫСОКИЙ, Q2 = НИЗКИЙ | Прямой ток |
Q1 = НИЗКИЙ, Q2 = ВЫСОКИЙ | Обратный ток |
Q1 = Q2 | Быстрая остановка ДВИГАТЕЛЯ |
Таким образом, если нажать только Q1, ток течет от OUT1 к OUT2.При этом ДВИГАТЕЛЬ вращается по часовой стрелке. Если нажать только Q2, ток течет от OUT2 к OUT1. При этом ДВИГАТЕЛЬ вращается против часовой стрелки. Если обе кнопки нажимаются или отпускаются одновременно, ДВИГАТЕЛЬ немедленно останавливается. Таким образом, мы можем управлять вращением двигателя с помощью микросхемы L298.
Если обе кнопки нажимаются или отпускаются одновременно, ДВИГАТЕЛЬ немедленно останавливается. Таким образом, мы можем управлять вращением двигателя с помощью микросхемы L298.
L298 Приложения
- Роботизированные руки
- Роботы
- Драйверы реле
- Торговые автоматы
- Машины промышленные
- Инженерные системы
- Измерительные приборы
- Хобби-проекты
L298 Сравнить с другими двигателями
При таком большом количестве приводов двигателей в настоящее время, как сервомоторы и шаговые двигатели, в чем на самом деле разница между драйверами двигателя и тем, какой из них выбрать? Не беспокойтесь, мы создали таблицу специально для вас, чтобы вы могли сравнить различные драйверы двигателей, чтобы вы знали, какой драйвер лучше всего подходит для вашего проекта.
Тип | Драйверы двигателей | Чип | Привод | Рабочее напряжение | Рабочий ток |
Роща | Драйвер двигателя Grove – I2C | L298N | 2 двигателя постоянного тока или 1 шаговый | 6в-15в | 2.0A каждый (макс.) |
Драйвер двигателя Grove – I2C (TB6612FNG) | TB6612FNG | 2 двигателя постоянного тока или 1 шаговый | 2,5–13,5 В (5 в среднем, 15 В макс.) | от 1,2 A (в среднем) до 3,2 A (макс.) | |
Драйвер двигателя Grove – I2C Mini | DRV8830 | 2 Двигатель постоянного тока | 2.75В-6,8В | от 0,2А до 1А каждый | |
Щит | Motor Shield V2.0 | L298N | 2 двигателя постоянного тока или 1 шаговый | 6в-15в | 2,0 А каждый (макс.) |
4A Щиток двигателя | MC33932 | 2 Двигатель постоянного тока | 6в-28в | 5.0A каждый (макс.) | |
Щиток бесщеточного двигателя (TB6605FTG) | TB6605FTG | 1 Бесщеточный двигатель постоянного тока | 9в-24в | – |
Производитель продукции
Группа компаний STmicroelectronics (ST) была создана в июне 1988 года в результате слияния компаний SGS Microelectronics из Италии и Thomson из Франции.В мае 1998 года SGS-Thomson Microelectronics изменила свое название на STmicroelectronics Limited.
Это крупнейший в мире производитель специализированных аналоговых микросхем и микросхем преобразования энергии, крупнейший в мире поставщик промышленных полупроводников и микросхем для телевизионных приставок, а также мировой лидер в производстве дискретных компонентов, модулей камер для мобильных телефонов и автомобильных интегральных схем.
Спецификация компонентов
FAQ
Этот модуль драйвера двигателя L298N представляет собой модуль драйвера двигателя высокой мощности для управления двигателями постоянного тока и шаговыми двигателями.Этот модуль состоит из микросхемы драйвера двигателя L298 и регулятора 5V 78M05. Модуль L298N может управлять до 4-мя двигателями постоянного тока или 2-мя двигателями постоянного тока с контролем направления и скорости. |
L298N — это драйвер двигателя с двойным Н-мостом, который позволяет управлять скоростью и направлением двух двигателей постоянного тока одновременно. Модуль может управлять двигателями постоянного тока с напряжением от 5 до 35 В с пиковым током до 2 А. |
1. Если вы отправите ВЫСОКИЙ сигнал на вывод разрешения 1, двигатель A готов к управлению и работает на максимальной скорости; 2. Если вы отправляете сигнал LOW на вывод разрешения 1, двигатель A выключается; 3. Если вы отправляете сигнал ШИМ, вы можете контролировать скорость двигателя. Скорость двигателя пропорциональна рабочему циклу. |
Этот модуль драйвера двигателя L298N представляет собой модуль драйвера двигателя высокой мощности для управления двигателями постоянного тока и шаговыми двигателями.Этот модуль состоит из микросхемы драйвера двигателя L298 и регулятора 5V 78M05. Модуль L298N может управлять до 4-мя двигателями постоянного тока или 2-мя двигателями постоянного тока с контролем направления и скорости. |
L298N — это драйвер двигателя с двойным Н-мостом, который позволяет управлять скоростью и направлением двух двигателей постоянного тока одновременно. Модуль может управлять двигателями постоянного тока с напряжением от 5 до 35 В с пиковым током до 2 А. |
Начните с подключения источника питания к двигателям. В нашем эксперименте мы используем двигатели с коробкой передач постоянного тока (также известные как двигатели TT), которые обычно используются в полноприводных роботах. Они рассчитаны на напряжение от 3 до 12 В. Итак, подключим внешний блок питания 12 В к клемме VCC. |
H-мост — это электронная схема, которая переключает полярность напряжения, приложенного к нагрузке.Эти схемы часто используются в робототехнике и других приложениях, чтобы двигатели постоянного тока могли работать вперед или назад. |
L293 — это четверной драйвер с половинной H, тогда как L298 — это двойной драйвер с полной H, т. Е. В L293 все четыре линии ввода-вывода независимы, в то время как в L298 драйвер с половиной H не может использоваться независимо, должен быть только полный драйвер H. использовал…. Значит, в L298 предусмотрен радиатор. |
Распиновка ИС драйвера двигателя L298N, функции, приложения и пример
Драйвер двигателя L298N IC имеет множество применений во встраиваемой области, особенно в области робототехники. Большинство микроконтроллеров работают с очень низким напряжением (5 В) и током, в то время как двигатели требуют более высоких напряжений и силы тока. Таким образом, микроконтроллеры не могут обеспечить им такой более высокий ток.Для этого мы используем микросхемы драйверов двигателей.
Драйвером двигателя является небольшой усилитель тока. Он принимает сигнал низкого тока и выдает сигнал высокого тока, который может приводить в действие двигатель. Он также может управлять направлением двигателя. Моторные приводы бывают разных типов в зависимости от максимального напряжения питания, максимального выходного тока, номинальной рассеиваемой мощности, напряжения нагрузки, количества выходов и т. Д. Здесь мы собираемся обсудить драйвер двигателя L298N. Он используется в проекте управления скоростью двигателя постоянного тока, и вы можете легко связать двигатель постоянного тока с микроконтроллером, используя этот драйвер двигателя.а также в роботе, управляемом по Bluetooth, с помощью микроконтроллера pic. вы можете проверить робота-следящего за линией, чтобы узнать больше о его приложениях.
Характеристики модуля драйвера двигателя L298N
L298N — это 15-ваттный блок интегральной схемы, обеспечивающий высокое напряжение. Это сильноточный двойной драйвер с полным мостом , который поддерживает стандартные логические уровни TTL. Он может управлять индуктивными нагрузками, например, , реле, , соленоиды, двигатели (постоянного тока и шаговые двигатели) и т. Д.
Его основные характеристики:
- Максимальное напряжение питания 46 В
- Максимальная мощность Постоянный ток 4A
- Низкое напряжение насыщения
- Защита от перегрева
- Входное напряжение логического «0» до 1,5 В
Схема выводов на виде сверху для L298N приведена ниже:
Внутренняя цепь драйвера двигателя
ОПИСАНИЕ ПИН модуля L298NL298N состоит из четырех независимых усилителей мощности.Два из них образуют H-мост A, а два других образуют H-мост B. Один H-мост используется для переключения полярности при управлении двигателем постоянного тока. Пара H-моста используется для управления двухполюсным шаговым двигателем.
- Усилитель A1 и A2 => Н-мост A
- Усилитель B1 и B2 => Н-мост B
В основном L298N используется для управления индуктивными или магнитными нагрузками, поэтому на выходе могут возникать скачки напряжения. Чтобы избежать скачков напряжения, должны быть установлены внутренние паразитные диоды или диоды маховика.Но им их не хватает. Мы используем эти диоды маховика внешне. Это могут быть диоды Шоттки 1N5819 или выпрямительные диоды 1N4001.
Каждый мост снабжен контактами включения (ENA, ENB) и контактами измерения тока (CSA, CSB). Контакты измерения тока могут быть связаны с землей, но мы также можем вставить резистор с низким сопротивлением, и его показание напряжения пропорционально току. Оба контакта включения могут использоваться одновременно, что делает активными все выходы одновременно. Все четыре входа и контакты включения работают по логике TTL 5 В, что упрощает соединение с микроконтроллерами.
- ENA = 5 В, высокий логический уровень (усилители A1 и A2 включены)
- ENA = 0 В, логика низкого уровня (усилители A1 и A2 выключены)
- ENB = 5 В, высокий логический уровень (усилители B1 и B2 включены)
- ENB = 0 В, логика низкого уровня (усилители B1 и B2 выключены)
L298N модуль драйвера двигателя работает
- Теперь рассмотрим пример. Мы будем использовать водолазный мостовой двигатель IC L298N и два двигателя постоянного тока. Эта ИС используется для управления этими двигателями. Мы хотим изменить полярность двигателей, чтобы они могли работать в любом направлении в зависимости от логики.
- ВХОДЫ: Четыре входа предназначены для четырех усилителей мощности L298N. Мы можем использовать кнопки, и всякий раз, когда нажимается определенная кнопка, запускается конкретный двигатель. Два входа будут контролировать каждый двигатель. Вместо кнопки мы можем для простоты использовать логический переключатель в моделировании Proteus.
- Биты включения используются для выбора конкретного усилителя. ENA может выбрать два усилителя A1, A2, и аналогично ENB может выбрать два усилителя B1, B2. При использовании в качестве мостовой схемы ENA выбирает мост A, а ENB выбирает мост B.Чтобы управлять обоими двигателями с помощью H-мостов, оба бита разрешения установлены на высокий уровень.
- ВЫХОДЫ: Всего четыре выхода. Выход для двигателя A получается от выводов out1 out2, и аналогично для двигателя B вывод получается от выводов out3 out4. L298N не имеет встроенных защитных диодов, мы используем внешние диоды, чтобы предотвратить повреждение микросхемы.
- В этой ИС используются два разных напряжения. На входной стороне 5В подается на контакт 9 (Vss), кнопки и биты разрешения. На выходной стороне, контакт 4 (Vs) питает двигатели, и это может быть до 46 В.Здесь мы не используем схему измерения тока, поэтому мы заземлили эти контакты 1 и 15. Скорость двигателей будет ниже, если на выходной стороне будет низкое напряжение.
Пример модуля L298N для управления направлением двигателя
Включение контакта 6, если мы зададим логику как:
| Pin5 = высокий, pin7 = низкий, двигатель A начнет вращаться по часовой стрелке. Pin5 = низкий, pin7 = высокий, двигатель A начнет вращаться против часовой стрелки Pin5 = высокий, pin7 = высокий, двигатель A остановится Контакт 5 = низкий, контакт 7 = низкий, двигатель A остановится |
Разрешение контакта 11, если мы зададим логику как:
| Pin10 = высокий, pin12 = низкий, двигатель B начнет вращаться по часовой стрелке Pin10 = низкий, pin12 = высокий, двигатель B начнет вращаться против часовой стрелки Pin10 = высокий, pin12 = высокий, двигатель B остановится Контакт 10 = низкий, контакт 12 = низкий, двигатель B остановится |
В этом примере с Proteus мы использовали переключение входов.Мы также можем изменить настройки входа переключения при запуске, если нам нужно постоянно запускать двигатель. При использовании кнопок сбоку от кнопок подключается источник питания, а другие подключаются к входам L298N. Пока кнопка нажата, двигатель будет продолжать работать в указанном направлении в соответствии с логикой, заданной с помощью кнопки. На практике также используйте радиаторы.
Видеолекция по приводу двигателя постоянного тока
Принципиальная схема для управления 2 двигателями с L298N
Здесь мы смоделировали приведенный выше пример.В настоящее время оба двигателя вращаются по часовой стрелке. Если я переверну обе логики, они будут работать против часовой стрелки. И если такая же логика задана любому входу двигателя, он не сможет двигаться ни в одном направлении и остановится.
L298, модуль драйвера двигателя с двойным Н-мостом
Вы когда-нибудь задумывались, как работают двигатели постоянного тока, реле и шаговые двигатели? Это все работы L298! Научиться управлять двигателями постоянного тока станет намного проще после того, как вы научитесь использовать L298.
Из этой статьи вы узнаете все о двойном H-мостовом драйвере L298. В этом блоге мы рассмотрим:
- Что такое двигатель постоянного тока?
- Что такое двойной H-мостовой драйвер L298?
- Характеристики L298
- Распиновка L298
- Драйвер двигателя L298n
- Как работает драйвер двигателя L298n?
- Применение драйвера двигателя L298n
- Управление двигателем постоянного тока с помощью драйвера двигателя L298n и Arduino
- Сравнение с другими драйверами двигателя
Что такое двигатель постоянного тока?
Двигателипостоянного тока — это двигатели, которые работают от постоянного тока (DC).Двигатели постоянного тока доступны в нескольких различных конфигурациях от крошечных маленьких двигателей до абсолютно огромных. Двигатели постоянного тока могут использоваться в базовых роботах, квадрокоптерах, моделях самолетов и лодок.
Как работает двигатель постоянного тока?
Рабочий щеточный двигатель постоянного тока(Источник: Renesas)
- Двигатели постоянного тока состоят из катушек с проводом
- Катушки, подключенные к коммутатору
- Катушки окружены парой магнитов или статором
- Постоянный ток, приложенный к коммутатору
- Магнитное поле формируется в катушках
- Катушка магнитное взаимодействие с магнитами («статор»)
- Направление вращения можно изменить, изменив полярность на контактах двигателя
Для получения дополнительной информации, пожалуйста, обратитесь к блогу Хелен, Выбор Правильный двигатель для вашего проекта — DC против шаговых против серводвигателей.
Что такое двойной H-мостовой драйвер L298?
- L298 — это микросхема привода двигателя высокого напряжения и тока, которая принимает логические сигналы TTL.
- Они в основном используются, когда
- Это необходимо для работы с различными нагрузками, такими как двигатели, соленоид и т. Д., Где требуется H-образный мост.
- Требуется драйвер двигателя высокой мощности.
- Блок управления может обеспечивать только выходы TTL.
- Требуется одночиповое устройство управления током и управляемое ШИМ.
- Он имеет два разрешающих входа, позволяющих независимо включать или отключать конкретное устройство, подключенное к его выходу.
Таким образом, H-мост в основном используется для управления направлением вращения в двигателях постоянного тока.
Характеристики L298
Основные характеристики модуля L298n:
- Высокое рабочее напряжение — может достигать 46 В
- Большой выходной ток
- Мгновенный пиковый ток может достигать 3 А
- Непрерывный рабочий ток может достигать 2 А
- Номинальная мощность 25 Вт
- Полномостовой драйвер высокого напряжения и тока с двумя Н-мостами, используемыми для управления индуктивными нагрузками, такими как двигатели постоянного тока и шаговые двигатели.
- Управляется стандартными сигналами логического уровня
- 2 разрешают управляющие клеммы для включения или устройства без ввода сигналов.
- Может управлять двухфазным шаговым двигателем, четырехфазным шаговым двигателем или двумя двигателями постоянного тока.
- Имеет конденсатор фильтра большой емкости и обратный диод для защиты устройств от обратного тока индуктивной нагрузки.
- Встроенная трубка стабилизатора 78M05 может использоваться для получения 5В от блока питания. (Должен использоваться с внешним источником логики 5 В, когда напряжение привода превышает 12 В для защиты микросхемы)
L298 Распиновка
Функции контактов:
| Номер контакта | Имя контакта | Описание |
| 1 15 | Sense A Sense B | Используется для подключения измерительного резистора через этот контакт к земле для управления током Загрузка. |
| 2 3 | Out 1 Out 2 | Выход моста A, который представляет собой ток, который проходит через между этими двумя контактами, который контролируется на контакте 1 |
| 4 | VS | Напряжение питания во время выходных каскадов мощности (неиндуктивный конденсатор 100 нФ должен быть подключен между контактом и землей) |
| 5 7 | Вход 1 Вход 2 | TTL-совместимые входы моста A |
| 6 11 | Включить A Включить B | TTL-совместимый вход включения |
| 8 | GND | GND (точка, где все напряжения могут быть измерены от) |
| 9 | Vss | Напряжение питания для логики Блоки (неиндуктивный конденсатор 100 нФ должен быть подключен между контактом и землей) |
| 10 12 | Вход 3 Вход 4 9003 8 | TTL-совместимые входы моста B |
| 13 14 | Out 3 Out 4 | Выходы моста B.Ток, протекающий через , здесь контролируется на выводе 15 |
L298n Драйвер двигателя
Модуль L298 в основном используется для разработки драйверов двигателей. Компания Seeed предлагает различные драйверы двигателей L298n.
L298 Драйвер двигателя с двойным Н-мостом
- Модуль драйвера с двойной H использует двойной полномостовой драйвер ST L298N, интегрированную монолитную схему в 15-выводных корпусах Multiwatt и PowerSO20.
- Это высоковольтный, сильноточный двойной мостовой драйвер, предназначенный для работы со стандартными логическими уровнями TTL и управления индуктивными нагрузками, такими как реле, соленоиды, двигатели постоянного тока и шаговые двигатели.
Motor Driver L298 — Совместимость с .NET Gadgeteer
- Этот модуль драйвера двигателя управляет скоростью и направлением 2 двигателей постоянного тока, до 40 В, 3 А.
- Сам модуль питается и управляется с материнской платы gadgeteer, но двигатели питаются от отдельного источника питания.
Grove — Драйвер двигателя I2C
- Он напрямую управляет шаговым двигателем или двигателем постоянного тока. Его сердцем является двухканальный чип драйвера H-моста (L298N), который может обрабатывать ток до 2 А на канал, управляемый Atmel ATmega8L, который обеспечивает связь I2C с такими платформами, как Arduino.
- Оба двигателя могут работать одновременно, если установлены разные скорость и направление. Он может приводить в действие два щеточных двигателя постоянного тока или один четырехпроводной двухфазный шаговый двигатель.
Как работает драйвер двигателя l298n?
На схематической диаграмме ниже показана внутренняя структура и рабочий процесс драйвера двигателя L298n:
- Режим управления и состояние двигателя A показаны в таблице ниже:
| Двигатель 1 (IN1), Двигатель 2 (IN3) | Двигатель 1 (IN2), Двигатель 2 (IN4) | Двигатель Вращение |
| 0 | 0 | Остановка вращения |
| 0 | 1 | По часовой стрелке |
| 1 | 0 | Против часовой стрелки |
| 1 | 1 | Остановка вращения |
- Как видно из таблицы, направление вращения контролируется управляющими контактами IN1 и IN2 для двигателя 1, а управляющими контактами IN3 и IN4 для двигателя 2.
- Когда включен сигнал = 1
- IN1 и IN2 равны 00 или 11, это означает, что двигатель находится в состоянии тормоза
- IN1 равен 0, а IN2 равен 1, это означает, что двигатель A будет вращаться по часовой стрелке
- IN1 равен 1, а IN2 равен 0, это означает, что двигатель A будет вращаться против часовой стрелки
- Метод управления двигателем B такой же, как и для двигателя A
- Скорость двигателя также можно контролировать с помощью штифта управления PWM модуля (ENA для двигателя 1, ENB для двигателя 2)
- При регулировании скорости , Сначала необходимо подтвердить направление вращения IN1 и IN2 и вывести импульсы ШИМ для задействованных клемм.
Давайте посмотрим, как драйвер двигателя с Н-мостом l298n работает с двигателем постоянного тока.
Для упрощения я нарисовал один комплект драйвера H-моста с 4 переключателями. Почему его называют H-мостом? Как вы можете видеть, в конфигурации с мотором, сидящим в мостовой части буквы H, есть буква H. Как это работает?
Давайте подадим положительное напряжение на верхнюю часть H-моста и подадим отрицательное напряжение на нижнюю часть.
Итак, что происходит, когда мы замыкаем эти два переключателя?
Положительный полюс применяется к левой стороне двигателя, а отрицательный — к правой. В этом случае мотор будет вращаться на по часовой стрелке на .
И наоборот, если вы включите два других переключателя и оставите эти два открытыми.
Теперь положительный полюс применяется к правой стороне двигателя, а отрицательный — к другой стороне. В этом случае мотор будет вращаться на против часовой стрелки на .
Широтно-импульсная модуляция (ШИМ)Скорость двигателя определяется шириной импульса ШИМ, отправляемого на вход «Enable» драйвера двигателя L298N. Чем шире импульсы, тем быстрее будет вращаться мотор. Таким образом, ШИМ позволяет контролировать скорость.
Применение L298n
L298n Моторные драйверы используются повсюду в нашей повседневной жизни, от торговых автоматов до роботов. Вы также можете поэкспериментировать с L298n для управления двигателями постоянного тока прямо дома с помощью руководства ниже
.Управление двигателями постоянного тока с помощью Arduino
Двойной H-мост L298n позволяет переключать направление тока, что означает, что с помощью двигателя вы можете заставить его вращаться в обоих направлениях.Кроме того, с входом PWM вы можете использовать Arduino, чтобы заставить его вращаться с любой скоростью.
- Шаг 1. Установка адреса с помощью дискового переключателя. Это новая функция, добавленная в наш новый драйвер двигателя I2C.
- Шаг 2 — Подключите Grove — драйвер двигателя I2C V1.3 к порту I2C Grove-Base Shield.
- Шаг 3 — Подключите Grove — Base Shield к Seeeduino.
- Шаг 4 — Подключите Seeeduino к ПК через USB-кабель
- Шаг 5 — Загрузите библиотеку Grove_I2C_Motor_Driver_v1_3 с Github.
- Шаг 6 — См. Как установить библиотеку для установки библиотеки для Arduino
- Шаг 7 — Скопируйте код в Arduino IDE и загрузите. Если вы не знаете, как загрузить код, проверьте, как загрузить код.
Код
Функции управления двигателями постоянного тока
- С помощью функции скорости — вы можете управлять одним двигателем с нужной скоростью.
- motor_id представляет, какой двигатель использовать (MOTOR1 / 2)
- _speed представляет скорость, которую вы можете установить.Это может быть от -100 до 100, при скорости> 0 двигатель постоянного тока будет вращаться по часовой стрелке, а если скорость <0, двигатель постоянного тока будет вращаться против часовой стрелки. Чем больше значение, тем быстрее.
- С функцией остановки — вы можете остановить работу двигателя постоянного тока.
- идентификатор двигателя представляет, какой двигатель использовать (ДВИГАТЕЛЬ1 / 2)
Вот и все! Теперь у вас есть собственный двигатель постоянного тока, управляемый с помощью Seeeduino с драйвером двигателя I2C!
Пример установки оборудованияЗаинтересованы в расширении возможностей вашего привода двигателя L298? Вы можете щелкнуть здесь, чтобы узнать, как управлять шаговым двигателем и играть с Codecraft с помощью драйвера двигателя L298n: Seeedstudio Wiki — Grove — I2C Motor Driver V1.3
Сравнение с другими драйверами двигателя
В настоящее время существует так много драйверов двигателей, как сервомоторы и шаговые двигатели, в чем на самом деле разница между драйверами двигателей и тем, какой из них выбрать? Не беспокойтесь, мы создали таблицу специально для вас, чтобы вы могли сравнить различные драйверы двигателей, чтобы вы знали, какой драйвер лучше всего подходит для вашего проекта.
Сводка
Обладая всеми знаниями о драйвере двигателя L298n, теперь вы можете начать создавать свои собственные робототехнические проекты! Вы можете ознакомиться с таблицей данных L298n для получения более подробной информации о L298 здесь: L298 Datasheet
Следите за нами и ставьте лайки:
Продолжить чтение
Плата драйвера двигателя с двумя Н-мостами — L298N
Плата драйвера двигателя с двумя Н-мостами — L298N — Robot Gear Australia— Веб-сайт Robot Gear лучше всего работает с включенными Javascript и файлами cookie —
- Дом
- Контроллеры двигателей
- Двойной канал
Плата драйвера двигателя на основе L298N может использоваться для управления двумя щеточными двигателями постоянного тока с постоянным током до 2 А на двигатель.Он оснащен большим радиатором и винтовыми клеммами для легкой установки.
Обзор
Драйвер мотора построен на популярной микросхеме L298. Он имеет пиковый ток 2 А на двигатель и может управляться через TTL с любого микроконтроллера с входами 3,3-5 В. Встроенный регулятор 78M05 5V может использоваться для подачи логического питания ~ 450mA на плату или внешний микроконтроллер с питанием 7-35V.
Соединения двигателя, питания и заземления легко выполняются с помощью винтовых клемм, а логические соединения предусмотрены на 0,1-дюймовом разъеме для легкого подключения с помощью перемычек.
светодиода предназначены для индикации направления двигателя и источника питания.
Технические характеристики
- Диапазон входного напряжения Vs: +5 В- + 35 В. Если встроенный стабилизатор используется для питания внешних компонентов, диапазон питания составляет +7 В ~ +35 В.
- Пиковый ток: 2 А на двигатель. На практике это будет зависеть от условий окружающей среды и расхода воздуха.Максимальная потребляемая мощность в сумме составляет 20 Вт.
- Логическое напряжение Vss: +5 В ~ +7 В (питание от платы: +5 В)
- Потребляемая мощность логической части: 0 ~ 36 мА
- Диапазон входного напряжения управляющего сигнала:
- Низкий: -0,3 В ≤ Vin ≤ 1,5 В
- Высокий: 2,3 В ≤ Vin ≤ Vss
- Диапазон входного напряжения сигнала разрешения:
- Низкий: -0,3 ≤ Vin ≤ 1,5 В (управляющий сигнал недействителен)
- Высокая: 2.3V ≤ Vin ≤ Vss (управляющий сигнал)
- Максимальная потребляемая мощность: 20 Вт (температура T = 75 ° C)
- Температура хранения: от -25ºC до +130 ºC
- Размеры: 55 м * 39 * 33 мм
- Вес: 35 г
Документы
L298 Лист данных
Схема
L298 Схема платы драйвера двигателя
Сопутствующие товары
Авторские права © 2009 Robot Gear.Веб-сайт от PCS1995 г. — инструкция по применению L297 Аннотация: L298N L297 L298 и униполярный шаговый двигатель Конфигурация выводов L297 L298N примечание по применению l297 l298 Эквивалент L297 L297 схематический униполярный шаговый двигатель с полным шагом с использованием L297 | Оригинал | L298N anL298N L293E Примечание по применению L297 L297 L298 и униполярный шаговый двигатель Конфигурация контактов L297 Примечание по применению L298N l297 l298 L297 эквивалент Схема L297 униполярный полный шаговый двигатель с использованием L297 | |
Нет в наличии Аннотация: абстрактный текст недоступен | Сканирование OCR | L298N L298N 15-выводный L6506. | |
2003 — инструкция по применению СТ Л6203 Аннотация: Схема микрошагового микрошагового двигателя L298N L6203 с использованием микросхемы L6219 L298n AN460 L297 Указание по применению униполярного полного шагового двигателя с использованием L297 L297 Theory l297 | Оригинал | AN460 Примечание по применению ST L6203 L298N микрошаговый L6203 схема биполярного шагового двигателя с использованием L6219 микросхема L298n AN460 Примечание по применению L297 униполярный полный шаговый двигатель с использованием L297 L297 Теория l297 | |
L298N Аннотация: Схема выводов l298n ic L298n ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА L298n L298N примечание по применению l298n принципиальная схема L298N Схема выводов драйвера шагового двигателя L298n двигатель постоянного тока l298n контроллер двигателя CS-0273 | Сканирование OCR | L298N L298N 15-выводный CS-0273 L6506.00S2LA1 l298n схема контактов микросхема L298n ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА L298n Примечание по применению L298N Принципиальная схема l298n Схема контактов драйвера шагового двигателя L298N L298n двигатель постоянного тока l298n контроллер двигателя CS-0273 | |
1995 — L293 и униполярный шаговый двигатель Аннотация: lm339 pwm speed motor ПРИВОД ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С LM339 lm339 pwm speed DC motor L298N L293 H Драйвер двигателя постоянного тока с внутренней структурой моста с использованием L298 L298 и униполярного шагового двигателя L297 ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА L298n | Оригинал | L293E L293 и униполярный шаговый двигатель lm339 pwm скорость двигателя ПРИВОД ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА С LM339 lm339 pwm скорость двигателя постоянного тока L298N L293 H Внутренняя структура моста драйвер двигателя постоянного тока с использованием L298 L298 и униполярный шаговый двигатель Примечание по применению L297 ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА L298n | |
L29BN Аннотация: Схема выводов драйвера шагового двигателя SGS-Thomson L298n l298n L298N | Сканирование OCR | 15-выводный L298N 15-выводный L29BN L298N L6506.SGS-Томсон L298n Схема контактов драйвера шагового двигателя L298N | |
2003 — L298 и униполярный шаговый двигатель Резюме: L298N L297 примечание по применению униполярный шаговый двигатель с полным шагом с использованием схемы выводов L297 l298n Конфигурация выводов L297 l297 l298 AN470 l297 L298N примечания по применению | Оригинал | AN470 L298N L293E L298 и униполярный шаговый двигатель Примечание по применению L297 униполярный полный шаговый двигатель с использованием L297 l298n схема контактов Конфигурация контактов L297 l297 l298 AN470 l297 Примечание по применению L298N | |
L298N, инструкция по применению Аннотация: Схема выводов SGS-Thomson L298n L298N l298n Схема выводов драйвера шагового двигателя L298N | Сканирование OCR | 880-3764×25 L6506.L298N Примечание по применению L298N SGS-Томсон L298n L298N l298n схема контактов Схема контактов драйвера шагового двигателя L298N | |
1995 — l6203 заметки по применению смысл Реферат: L298N L297 примечания по применению l6203 примечания по применению микрошаговый трансформатор прерывателя L6203 ДЛЯ ИБП L297 L6203 знаковая величина PBL3717A L297 Теория | Оригинал | ||
1986 — ic ttl 7408 Аннотация: L293 и униполярный шаговый двигатель L298N конфигурация выводов микросхемы 7408 L297 примечание по применению микросхема L298n схема повышающего прерывателя IC TTL 7408 бесплатно SGS-Thomson L298n L297 * приложение | Оригинал | L293E L298N ic ttl 7408 L293 и униполярный шаговый двигатель конфигурация выводов микросхемы 7408 Примечание по применению L297 микросхема L298n конструкция цепи импульсного прерывателя IC TTL 7408 бесплатно SGS-Томсон L298n L297 * приложение | |
1995 — эквивалент TBA820M Аннотация: L298 и управляющие униполярные шаговые двигатели. L297 l298 lm339 pwm speed motor L297 application note l297 l298 dc motor driver using L298 Dynamo l298 dc MOTOR L298n | Оригинал | L293E Эквивалент TBA820M L298 и униполярный шаговый двигатель управляющие двигатели l297 l298 lm339 pwm скорость двигателя Примечание по применению L297 l297 l298 драйвер двигателя постоянного тока с использованием L298 генератор динамо l298 ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА L298n | |
Схема выводов привода шагового двигателяL298N Аннотация: абстрактный текст недоступен | Сканирование OCR | L298N 15-выводный L298N 15-выводный L6506.Схема контактов драйвера шагового двигателя L298N | |
1995 — Приложение L298N Реферат: 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298N L298 и униполярный шаговый двигатель L298, а также биполярный шаговый двигатель L293 и униполярный шаговый двигатель L298, униполярный L7180 микрошаговый L6506 | Оригинал | L6506 L298N, L7180 Примечание по применению L298N 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298N L298 и униполярный шаговый двигатель L298 и биполярный шаговый двигатель L293 и униполярный шаговый двигатель l298 униполярный L7180 микрошаговый L6506 | |
2003 — L298 и униполярный шаговый двигатель Реферат: 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298 микрошаговый L6506 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298N AN469 L6506 L293 и микросхема униполярного шагового двигателя L298n двигатель постоянного тока l298n | Оригинал | AN469 L6506 L298N, L7180 L298 и униполярный шаговый двигатель 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298 микрошаговый L6506 4-фазный БИПОЛЯРНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ L298N AN469 L293 и униполярный шаговый двигатель микросхема L298n двигатель постоянного тока l298n | |
1986 — технический паспорт IC 7408 Аннотация: L298N TTL 7408 L293 и униполярный шаговый двигатель ic 7408 Лист данных, применение схемы, не IC 7408 ТЕХНИЧЕСКИЙ ПАСПОРТ ic ttl 7408 7408 TTL Конфигурация контактов L297 IC 7408 | Оригинал | L293E L298N Типовой лист IC 7408 TTL 7408 L293 и униполярный шаговый двигатель Лист данных ic 7408, применение схемы нет ТЕХНИЧЕСКИЕ ДАННЫЕ IC 7408 ic ttl 7408 7408 TTL Конфигурация контактов L297 IC 7408 | |
2003 — микросхема L298n Аннотация: драйвер шагового двигателя l298n L298N, схема выводов драйвера шагового двигателя stepyn MOTOR stepsyn IC L293D как дать входное программирование униполярного шагового двигателя в c 103H546-0440 IC драйвера шагового двигателя L293D | Оригинал | H8 / 300L AN0303006 / Rev1 микросхема L298n драйвер шагового двигателя l298n Схема контактов драйвера шагового двигателя L298N Stepyn МОТОР Stepyn IC L293D как дать ввод Программирование униполярного шагового двигателя на языке c 103H546-0440 шаговый двигатель Микросхема драйвера двигателя L293D | |
1998 — полный мост привода шагового двигателя 6А Аннотация: mosfet 600V 20A 600v 30a IGBT 20NB50 PSO-36 igbt to220 IC Driver IC L293D Triac 3a 600v L298N IGBT full bridge | Оригинал | BTW68 / 69 BF3506TV / 10ТВ BHA / K3012TV 0-55A 00 В / 35 А 000В / 35А L4981A / B STW / Y / ExNA60 STTAxx06 Драйвер шагового двигателя полный мост 6A MOSFET 600 В 20 А 600v 30a IGBT 20NB50 ПСО-36 igbt to220 Микросхема драйвера двигателя L293D Симистор 3а 600в L298N Полный мост IGBT | |
СТ Л298Н Аннотация: абстрактный текст недоступен | Оригинал | L298N СТ L298N | |
Нет в наличии Аннотация: абстрактный текст недоступен | Сканирование OCR | L298N | |
2003 — униполярный шаговый двигатель полного шага с использованием L297 Аннотация: Схема драйвера шагового двигателя L297 Theory L297 Управление униполярным двигателем с использованием обычного униполярного шагового двигателя L297 Примечание по применению L298N униполярный шаговый двигатель PWM CHOPPER TYPE УНИПОЛЯРНЫЙ ШАГОВЫЙ ДРАЙВЕР L297 Схема драйвера биполярного шагового двигателя L297 AN468 | Оригинал | AN468 униполярный полный шаговый двигатель с использованием L297 L297 Теория Схема драйвера шагового двигателя L297 Управление униполярным двигателем с помощью обычного L297 униполярный шаговый Примечание по применению L297 L298N униполярный шаговый ДРАЙВЕР УНИПОЛЯРНОГО ШАГОВОГО ДВИГАТЕЛЯ ТИПА ИЗМЕЛЬЧИТЕЛЯ ШИМ Схема драйвера биполярного шагового двигателя L297 AN468 | |
Нет в наличии Аннотация: абстрактный текст недоступен | Оригинал | L298N 15 свинец PowerSO20 | |
1995 г. — инструкция по применению L297 Реферат: h-мостовой драйвер двигателя L298N двухфазный униполярный полношаговый шаговый двигатель SGS-Thomson с униполярным шаговым двигателем L297 L297 Theory L297 L6506 PWM CHOPPER TYPE УНИПОЛЯРНЫЙ ШАГОВЫЙ ДРАЙВЕР PBL3717A L298N | Оригинал | ||
SGS-Томсон L297 Аннотация: l297 l298 биполярный l297 l298 L297 схема драйвера шагового двигателя привод шагового двигателя l297 L297D IM1001 L297A L297 схема драйвера биполярного шагового двигателя L297 униполярный шаговый двигатель | Сканирование OCR | L297 / A / D L297Aonly) DIP20 L297A DIP20) L297D L297A-L297D 0b742cà SGS-Томсон L297 l297 l298 биполярный l297 l298 Схема драйвера шагового двигателя L297 привод шагового двигателя l297 L297D IM1001 Схема драйвера биполярного шагового двигателя L297 L297 униполярный шаговый | |
l297 l298 Аннотация: l297 l298 биполярный L297 L298 L297 CI L297 L298 298 униполярный шаговый двигатель L297 шаговый двигатель схема управления двигателями l297 l298 L297 униполярный шаговый двигатель L297A-L297D | Сканирование OCR | L297 / A / D L297Aonly) L297 / A / D DIP20 7CI2C1237 QQb742Ã L297A-L297D 2I1237 GDb742T l297 l298 l297 l298 биполярный L297 L298 L297 CI L297 L298 298 униполярный шаговый двигатель Схема драйвера шагового двигателя L297 управляющие двигатели l297 l298 L297 униполярный шаговый L297A-L297D | |
2000 — ИС драйвера L298 Реферат: H BRIDGE MULTIWATT 11 LEAD ic l298p | Оригинал | 15 свинец PowerSO20 L298P L298HN L298P013TR L298N L298 драйвер ic H МОСТ MULTIWATT 11 ОТВОДОВ микросхема l298p | |