Управление шаговым двигателем. Схема и описание
Шаговые двигатели не сильно отличаются от многих классических двигателей. Для управления шаговым двигателем необходимо подавать постоянное напряжение на обмотки в точной последовательности. Благодаря этому принципу, можно обеспечить точный угол поворота оси.
Более того, оставив напряжение питания на одной или нескольких обмотках двигателя, мы переводим двигатель в режим удержания. Шаговые двигатели получили широкое распространение в технике, к примеру, их можно найти в гибких дисководах, сканерах и принтерах. Существует несколько типов шаговых двигателей.
Типы шаговых двигателей
Существуют три основных типа шаговых двигателей:
- Двигатель с постоянным магнитом
- Двигатель с переменным магнитным сопротивлением
- Гибридный двигатель
Шаговый двигатель с постоянными магнитами
Шаговый двигатель с постоянными магнитами применяется наиболее часто в устройствах бытового назначения, нежели в промышленных устройствах.
Производство шагового двигателя с постоянными магнитами несложно и экономически оправдано, когда дело касается производства больших объемов. Однако из-за его относительной инертности, применение ограничено в устройствах, где требуется точное позиционирование по времени.
Шаговый двигатель с переменным магнитным сопротивлением
В шаговом двигателе с переменным магнитным сопротивлением нет постоянного магнита, и как результат этого — ротор вращается свободно, без остаточного крутящего момента. Этот тип двигателя часто используется в малогабаритных устройствах, например, в системах микро-позиционирования. Они не чувствительны к полярности тока и требуют систему управления отличную от других типов двигателей.
Гибридный шаговый двигатель
Гибридный двигатель, на сегодняшний день, является самым популярным двигателем в промышленной сфере. Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.
Его название происходит от того, что он сочетает в себе принципы работы двух других типов двигателя (с постоянными магнитами и переменным магнитным сопротивлением). Большинство гибридных двигателей имеют две фазы.Как работает гибридный двигатель
Работу гибридного шагового двигателя легко понять, глядя на очень простую модель, которая производит 12 шагов за один оборот.
Ротор этой машины состоит из двух частей, каждая из которых имеет три зуба. Между двумя частями находится постоянный магнит, намагниченный в направлении оси ротора, создавая, таким образом, южный полюс на одной части детали, и северного полюса на другой. Статор состоит из трубки, имеющей четыре зуба внутри нее. Обмотки статора намотаны вокруг каждого такого зуба.
Когда ток протекает через одну из обмоток, ротор занимает одно из положений, показанных на рисунках. Это связано с тем что, постоянный магнит ротора пытается минимизировать магнитное сопротивление обмотки. Крутящий момент, что стремится держать ротор в этих положениях, как правило, небольшой и называется «релаксация крутящего момента». Ниже изображена схема работы двигателя с 12 шагами.
Ниже изображена схема работы двигателя с 12 шагами.
Если ток течет по двум обмоткам статора, результирующие полюса будут притягивать зубы обратной полярности на каждом конце ротора. Есть три устойчивых позиций для ротора, столько же, сколько количество зубьев на роторе. Момент, необходимый для перемещения ротора от его стабильного положения во вращательное движение называется «удержание крутящего момента»
Изменяя ток первой до второй обмотки (В), магнитное поле статора поворачивается на 90 градусов и притягивает новую пару полюсов ротора. В результате этого ротор поворачивается на 30 градусов, что соответствует полному шагу. Возвращение к первому набору обмоток статора, но с питанием обратной полярности, изменяет магнитное поле статора еще на 90 градусов, и ротор поворачивается на 30 градусов (С).
Наконец, второй набор обмоток работает в противоположном направлении, обеспечивая третье положение ротора (еще 30 градусов). Теперь мы можем вернуться снова к первому этапу (А), и после прохождения заново всех этих четырех этапов, ротор будет перемещен еще на один зуб.
Очевидно, что если полярность питания обмоток будет противоположной описанной, то вращение двигателя так же сменится на противоположное.
Режим полшага
Подавая питание поочередно на одну обмотку, а затем на две, ротор будет совершать вращение на 15 градусов в каждом шаге и таким образом количество шагов на один оборот увеличится в два раза. Этот режим называется режимом «полшага», и большинство промышленных устройств применяют этот режим. Даже если это иногда вызывает небольшую потерю крутящего момента, режим в полшага намного плавнее на низких скоростях и вызывает меньший резонанс в конце каждого шага.
Когда шаговый двигатель находится под контролем в режиме «неполного шага», две фазы одновременно находятся под напряжением и крутящий момент обеспечивается на каждом шаге. В режиме полушага, питание чередуется между двумя фазами, и отдельной обмоткой, как показано на рисунке.
Биполярные и униполярные шаговые двигатели
От того какая у шагового двигателя форма обмоток, двигатели делятся на униполярные и биполярные. У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.
У биполярного двигателя по 1 обмотке в каждой фазе. Всего две обмотки и соответственно 4 вывода (рис. а). Для обеспечения вращения вала на эти обмотки должно подаваться напряжение с изменяемой полярностью. Поэтому для биполярного двигателя необходим полумостовой либо мостовой драйвер, снабженный двухполярным питанием.
Униполярный двигатель также как и биполярный, для каждой фазы имеет по одной обмотке, но каждая обмотка содержит отвод от середины. В связи с этим, путем переключения половинок обмотки шагового двигателя, появляется возможность менять направление магнитного поля.
В данном случае значительно упрощается структура драйвера двигателя. Он должен обладать всего лишь четырьмя силовыми ключами. Соответственно, в униполярном двигателе применяется иной метод изменения направления магнитного поля. Отводы обмоток зачастую объединяются внутри двигателя, вследствие этого данный тип двигателя может обладать пятью или шестью проводами (рис. б).
Порой униполярные двигатели снабжаются четырьмя обмотками, каждая из которых содержит собственные выводы – то есть их всего восемь (рис.
Управление шаговым двигателем
В качестве примера управления шаговым двигателем возьмем униполярный шаговый двигатель ШД-1ЕМ, имеющий характеристики: количество шагов — 200/об., ток обмотки – 0,5А, мощность — 12 Ватт.
Драйвером, управляющим обмотками шагового двигателя выберем микросхему ULN2003A. Эта уникальная микросхема, не что иное, как транзисторная сборка по схеме Дарлингтона с открытым коллектором, снабженная диодом, защищающим цепь питания нагрузки. ULN2003A имеет семь каналов управления с током нагрузки 500мА каждый.
Входы микросхемы ULN2003A можно напрямую подключать к выходам цифровых микросхем, поскольку она имеет резисторы, подключенные к базам транзисторов. Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Еще одним немаловажным моментом является то, что выходы ULN2003A снабжены диодами, которые защищают микросхему от индукционных выбросов в момент коммутации обмоток шагового двигателя.
Вывод 9 микросхемы ULN2003A подведен к источнику питания через стабилитрон, который защищает схему от ЭДС самоиндукции, появляющейся в момент выключения блока питания схемы. Управление шаговым двигателем производится с помощью компьютера через LPT порт при помощи программы:
Скачать программу управления шаговым двигателем (204,1 KiB, скачано: 2 041)
Сага о абсолютном энкодере и шаговом двигателе
- БЛОГИ
БЛОГИ
- 3D-моделирование
- 3D-печать
- RepRap
- Акции
- Бизнес
- Новости
- Обзоры
- Применение
- Разное
- Расходные материалы
- Творчество
- Техничка
- Песочница
- Личные дневники
- 3D-ОБОРУДОВАНИЕ
3D-ОБОРУДОВАНИЕ
- 3D-принтеры
- 3D-сканеры
- Производители
- Где купить
- События
- Частные объявления
- 3D-МОДЕЛИ
3D-МОДЕЛИ
- Бесплатные 3D-модели
- Магазин 3D-моделей
- Заказать 3D-модель
- Напечатать 3D-модель
- Частные объявления
- 3D-ВИКИ
3D-ВИКИ
- Энциклопедия 3D-печати
- 3D-ПЕЧАТЬ
- Новости
- Популярное
- Новое +13
- Акции
- Объявления +18
- Вопросы и Ответы +9
- Мы печатаем +1
Управление шаговым двигателем
Итак, вы определились, что для вашей системы нужен шаговый двигатель. Теперь пришло время решить, 2-фазный или 5-фазный. Кто сможет дать ответ? Благодаря тому, что японская компания ORIENTAL MOTOR производит как двухфазные (с шагом 1,8° / 0,9°), так и 5-фазные (с шагом 0,72° / 0,36°) шаговые двигатели и драйверы для них, их многосторонний опыт дает нам уникальную возможность провести сравнение функций, чтобы прояснить разницу между двухфазными и пятифазными двигателями. Мы остановимся на их сходстве и различии по таким параметрам как: разрешение, вибрация, крутящий момент, точность и синхронность.
Теперь пришло время решить, 2-фазный или 5-фазный. Кто сможет дать ответ? Благодаря тому, что японская компания ORIENTAL MOTOR производит как двухфазные (с шагом 1,8° / 0,9°), так и 5-фазные (с шагом 0,72° / 0,36°) шаговые двигатели и драйверы для них, их многосторонний опыт дает нам уникальную возможность провести сравнение функций, чтобы прояснить разницу между двухфазными и пятифазными двигателями. Мы остановимся на их сходстве и различии по таким параметрам как: разрешение, вибрация, крутящий момент, точность и синхронность.
2-фазный, 5-фазный, в чем разница?
Есть два основных различия в конструкции между 2-фазными и 5-фазными шаговыми двигателями. Первое — механическое: число полюсов статора. В 2-фазном двигателе статор состоит из 8 магнитных полюсов с маленькими зубцами, а 5-фазный двигатель — из 10 полюсов. Каждый полюс статора снабжен обмоткой и отсюда следует второе различие между 2-фазными и 5-фазными двигателями — электрическое, и оно заключается в количестве фаз.
Двухфазный двигатель имеет две фазы: фазу А и фазу В, а 5-фазный двигатель имеет пять фаз: A, B, C, D и E. А это значит, что переключения фаз в двигателях происходит в различных комбинациях, что влияет на их параметры.
Как эти различия влияют на производительность?
Существует несколько способов управления шаговым двигателем, и используемый драйвер сильно влияет на производительность двигателя. Однофазный режим, полношаговый, полушаговый и микрошаговый являются наиболее распространенными методами управления, и каждый из них обеспечивает различные значения характеристик. Однако независимо от метода управления, для 2-фазных и 5-фазных шаговых двигателей существуют различия в основных параметрах.
Разрешение
За исключением указанных отличий 5-фазный шаговый двигатель конструктивно практически не отличается от 2-фазного двигателя. Ротор в обоих моторах имеет 50 зубьев. Разница заключается в том, что, поскольку 5-фазный двигатель имеет 10 полюсов, по 2 на фазу, ротор должен двигаться только на 1/10 шага зуба, чтобы соответствовать следующей фазе. В двухфазном двигателе ротор должен двигаться на 1/4 шага зуба, чтобы соответствовать следующей фазе (8 полюсов, 4 на фазу). Это приводит к тому, что 2-фазный двигатель при каждом обороте совершает 200 шагов, по 1,8° на шаг, в то время как 5-фазный — 500 шагов, по 0,72° на шаг. Повышенная разрешающая способность 5-фазного двигателя — это следствие его конструкции. В сочетании с микрошаговым режимом управления 5-фазный двигатель может совершать шаги всего 0,00288°, однако точность и повторяемость положения ротора будут зависеть от механической точности двигателя.
В двухфазном двигателе ротор должен двигаться на 1/4 шага зуба, чтобы соответствовать следующей фазе (8 полюсов, 4 на фазу). Это приводит к тому, что 2-фазный двигатель при каждом обороте совершает 200 шагов, по 1,8° на шаг, в то время как 5-фазный — 500 шагов, по 0,72° на шаг. Повышенная разрешающая способность 5-фазного двигателя — это следствие его конструкции. В сочетании с микрошаговым режимом управления 5-фазный двигатель может совершать шаги всего 0,00288°, однако точность и повторяемость положения ротора будут зависеть от механической точности двигателя.
Механическая точность двухфазного и пятифазного двигателя составляет ± 3 угловых минуты (0,05°).
Вибрация
Из-за меньшего угла шага в 5-фазных шаговых двигателях (0,72° против 1,8° в 2-фазном двигателе) вибрация в 5-фазном двигателе значительно меньше, чем в 2-фазном. На графике показана вибрация, создаваемая 5-фазным двигателем, в сравнении с вибрацией, создаваемой 2-фазным шаговым двигателем.
Как вы можете видеть, двухфазный двигатель производит гораздо большие вибрации. Эти графики были созданы путем присоединения генератора к валу двигателя. Когда двигатель вибрировал, генератор выдавал напряжение, пропорциональное величине вибрации.
Крутящий момент
Хотя между величиной выходного крутящего момента 2-фазного шагового двигателя и 5-фазного шагового двигателя нет почти никакой разницы, моментная характеристика 5-фазного двигателя имеет более гладкую форму. Это связано прежде всего с количеством пульсаций крутящего момента, создаваемых обоими двигателями.
В полушаговом и микрошаговом режимах 5-фазный шаговый двигатель фактически увеличивает крутящий момент до 10% из-за большего количества фаз, находящихся под напряжением. 2-фазные двигатели будут терять крутящий момент до 40% при полушаговом и микрошаговом режимах, однако, современные 2-фазные драйверы компенсируют эти потери увеличением тока в соседних обмотках.
Каждая фаза двигателя вносит синусоидальную кривую изменения крутящего момента в общий выходной крутящий момент двигателя (показано ниже). Разница между пиком и впадиной суммарного значения называется пульсацией крутящего момента.
Разница между пиком и впадиной суммарного значения называется пульсацией крутящего момента.
Пульсация крутящего момента вызывает вибрацию, поэтому чем больше эта разница, тем больше вибрация. Разница между пиком и впадиной в 2-фазном двигателе может достигать 29%, тогда как 5-фазная составляет всего около 5%. Поскольку пульсация крутящего момента непосредственно влияет на вибрацию, 5-фазный двигатель работает более плавно, чем 2-фазный.
Точность / Повторяемость
На точность поворота вала влияют электрические и механические параметры. Электрическая ошибка обычно вызвана несбалансированностью фаз. Например, сопротивление обмотки двигателя имеет допустимое отклонение ± 10%, поэтому возможна ситуация, что хотя двигатель рассчитан на 10 Вт, одна фаза может выдавать 9,2 Вт, а другая — 10,6 Вт. Эта разница между фазами приведет к тому, что ротор будет больше повёрнут одной фазе, чем к другой.
Существует несколько компонентов механической ошибки, основной из которых является конфигурация зуба. Несмотря на то, что зубья на двигателе должны иметь прямоугольное сечение, неидеальность технологического процесса их нарезки может привести к закруглению некоторых зубьев или их частей. Из-за этого вместо того, чтобы магнитный поток протекал по прямым линиям от статора к ротору, он может протекать по изогнутым траекториям, изменяя при этом электромагнитную силу притяжения на этом зубе.
Несмотря на то, что зубья на двигателе должны иметь прямоугольное сечение, неидеальность технологического процесса их нарезки может привести к закруглению некоторых зубьев или их частей. Из-за этого вместо того, чтобы магнитный поток протекал по прямым линиям от статора к ротору, он может протекать по изогнутым траекториям, изменяя при этом электромагнитную силу притяжения на этом зубе.
При использовании полношагового режима 2-фазный двигатель повторяет состояния на каждом 4-м шаге, а в 5-фазном двигателе состояния повторяются на каждом 10-м шаге. Поэтому электрическая ошибка, вызванная дисбалансом в фазах, обнуляется каждый 4-й шаг в 2-фазном и каждый 10-й шаг в 5-фазном двигателе.
А совершив целый оборот, тот же зуб окажется в исходной начальной точке, что устранит и механическую ошибку. Поскольку двухфазный двигатель совершает 200 шагов за оборот, его ошибки обнуляются (для конкретного положения) каждые 200 шагов, в то время как в 5-фазных двигателях через каждые 500 шагов.
Синхронность и потеря контроля положения
Поскольку 5-фазный шаговый двигатель перемещается только на 0,72° за шаг, для 5-фазного двигателя практически невозможно пропустить шаг из-за перерегулирования / недостаточного переключения.
Двигатель теряет синхронность или пропускает шаг, если зубья на роторе не совпадают с правильными зубцами на статоре. По какой причине зубья могут не выровняться должным образом? Это может случиться, если ротор проскочил мимо правильного зубца статора, либо не переместился достаточно далеко, чтобы выровняться с правильным зубцом статора на величину более чем на 3,6°. Почему именно 3,6°? Потому что расстояние между зубцами ротора составляет 7,2° (360°/50), а правильный зубец должен находиться менее чем на половине расстояния между зубьями статора для выравнивания (7,2° между зубьями ротора, разделенное на 2, дает 3,6°). Поэтому, когда ротор отклоняется от правильного зубца статора более чем на 3,6° вперёд, либо назад, следующий либо предыдущий зуб выровняется на своем месте, что заставит двигатель сделать лишний шаг или остаться на месте.
2-фазный двигатель имеет шаг 1,8°, который сопоставим с критическим углом 3,6°, и поэтому при некоторых условиях может происходить пропуск шага (из-за большой нагрузки при старте или при высокой скорости движения) или перескок на лишний шаг (при быстром торможении движения). 5-фазный двигатель имеешт шаг 0,72°, что значительно меньше критического угла, благодаря чему вероятность пропуска шага или перескока значительно снижается. При работе 5-фазного двигателя потеря контроля положения практически исключается.
Выводы
В зависимости от конкретного применения, вас вполне может устроить и 2-фазный шаговый двигатель. Однако если вам требуется более высокое разрешение, быстрый разгон и торможение, низкая вибрация и минимальная вероятность потери шага, то вам стоит остановить свой выбор на 5-фазном шаговом двигателе. Для применений, требующих высокую точность, низкие шум и вибрацию он будет лучшим выбором.
Если вы хотите подробнее ознакомиться с 2-фазными и 5-фазными шаговыми двигателями Oriental Motor, заходите на страничку Шаговые двигатели нашего сайта. Также вы можете скачать каталог 5-фазных шаговых двигателей по этой ссылке: Скачать каталог 5-фазные ШД Oriental Motor.
Также вы можете скачать каталог 5-фазных шаговых двигателей по этой ссылке: Скачать каталог 5-фазные ШД Oriental Motor.
Информацию о ценах, наличии и технических параметрах шаговых двигателей Oriental Motor запрашивайте у специалистов компании Giden Electronics по телефону +7 (495) 225-54-52 или по почте, которую вы можете найти на главной странице сайта Giden Electronics.
Драйвер шагового двигателя (Troyka-модуль) [Амперка / Вики]
Для управления шаговым двигателем при помощи микроконтроллера нужно не только управлять большой нагрузкой, но и обеспечить необходимую последовательность управляющих импульсов. Драйвер шагового двигателя из линейки Troyka-модулей позволяет микроконтроллеру управлять биполярным и униполярным шаговым двигателем.
Элементы платы
Подключение двигателя
На контакты 1, 2 подключается первая обмотка биполярного шагового двигателя. На контакты 3, 4 — вторая обмотка. Униполярный двигатель подключается точно также, просто не используются выводы из середин обмоток.
Питание двигателя
На колодки Vin подаётся напряжение 4,5–25 В постоянного тока. Для питания двигателя рекомендуется использовать отдельный контур питания, не связанный с цепью питания управляющего контроллера.
К примеру, если вы используете Arduino, не рекомендуется использовать питание с пина 5V Arduino. Это может привести к перезагрузке управляющего контроллера, или к перегрузке регулятора напряжения Arduino. В некоторых случаях допускается использовать для питания шагового двигателя пин Vin Arduino. Например, если Arduino запитана от мощного внешнего источника питания 7–12 В, напряжение которого при включении двигателя не падает ниже 7 В.
Контакты подключения 3-проводного шлейфа
Troyka-Stepper подключается к управляющей электронике по трём 3-проводным шлейфам. Назначение контактов 3-проводных шлейфов:
Питание (V) — красный провод. На него должно подаваться напряжение 3,3–5 В, которое используется для питания логической части драйвера шагового двигателя.
Земля (G) — чёрный провод. Должен быть соединён с землёй микроконтроллера.
Сигнальный — жёлтый провод. Через него происходит управление соответствующим пином модуля.
Для управления модулем используется от одного до трёх сигнальных контакта:
Step. Каждый раз, когда напряжение на этом контакте переходит из низкого уровня напряжения в высокий, шаговый двигатель делает следующий шаг.
Direction. Направление вращения шагового двигателя зависит от схемы подключения его обмоток и от напряжения на этом пине. Если на пине direction установлен высокий уровень напряжения, двигатель вращается в одну сторону. Если низкий — в другую. Если изменять направление вращения двигателя не нужно, вы можете не подключать этот контакт к микроконтроллеру.
- Enable. Высокий уровень на этом пине включает подачу напряжения на двигатель. При остановке шагового двигателя в определённом положении, питание продолжает поступать на его управляющую обмотку.
 Это приводит к нагреву шагового двигателя и излишнему расходу электроэнергии. Чтобы отключить подачу питания на двигатель, достаточно выставить низкий уровень напряжения на этом контакте. При остановке двигателя бывает полезно подать на этот контакт ШИМ-сигнал. Это позволит оставить на двигателе небольшое усилие, необходимое для удержания вала в текущем положении. Электроэнергии в таком случае будет тратится значительно меньше. Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Это приводит к нагреву шагового двигателя и излишнему расходу электроэнергии. Чтобы отключить подачу питания на двигатель, достаточно выставить низкий уровень напряжения на этом контакте. При остановке двигателя бывает полезно подать на этот контакт ШИМ-сигнал. Это позволит оставить на двигателе небольшое усилие, необходимое для удержания вала в текущем положении. Электроэнергии в таком случае будет тратится значительно меньше. Если нет необходимости управлять включением двигателя, вы можете не подключать этот контакт к микроконтроллеру. Тогда ток через обмотки двигателя будет течь всегда, если есть напряжение питания.
Индикатор вращения двигателя
Светодиодный индикатор. Горит зелёным при шаге в одну сторону, красным — при шаге в другую сторону.
Пример использования
- troykaStepper.ino
// Troyka-Stepper подключён к следующим пинам: const byte stepPin = 7; const byte directionPin = 8; const byte enablePin = 11; // Выдержка для регулировки скорости вращения int delayTime = 20; void setup() { // Настраиваем нужные контакты на выход pinMode(stepPin, OUTPUT); pinMode(directionPin, OUTPUT); pinMode(enablePin, OUTPUT); } void loop() { // Подаём питание на двигатель digitalWrite(enablePin, HIGH); // Задаём направление вращения по часовой стрелке digitalWrite(directionPin, HIGH); // Делаем 50 шагов for (int i = 0; i < 50; ++i) { // Делаем шаг digitalWrite(stepPin, HIGH); delay(delayTime); digitalWrite(stepPin, LOW); delay(delayTime); } // Переходим в режим экономичного удержания двигателя.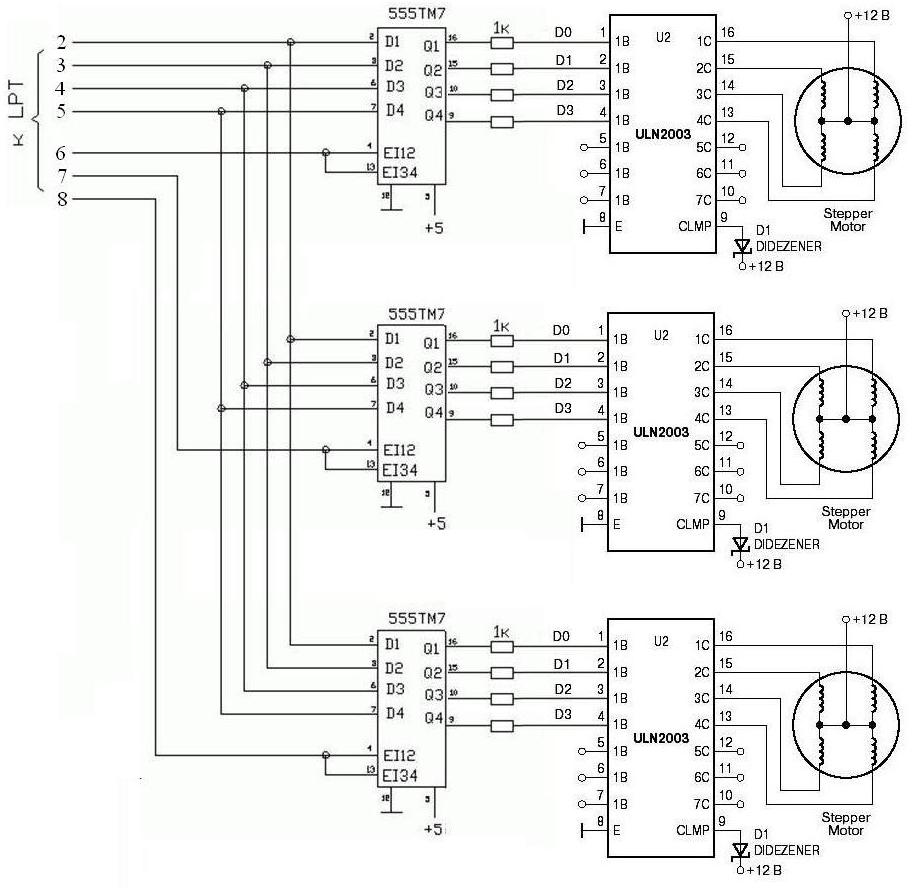 ..
analogWrite(enablePin, 100);
//... на три секунды
delay(3000);
// Меняем направление вращения
digitalWrite(directionPin, LOW);
// Включаем двигатель на полную мощность
digitalWrite(enablePin, HIGH);
// Делаем 50 шагов
for (int i = 0; i < 50; ++i) {
digitalWrite(stepPin, HIGH);
delay(delayTime);
digitalWrite(stepPin, LOW);
delay(delayTime);
}
// Ничего не делаем без отключения двигателя
delay(3000);
// Отключаем двигатель
digitalWrite(enablePin, LOW);
// Ничего не делаем до перезагрузки
while (true) {
;
}
}
..
analogWrite(enablePin, 100);
//... на три секунды
delay(3000);
// Меняем направление вращения
digitalWrite(directionPin, LOW);
// Включаем двигатель на полную мощность
digitalWrite(enablePin, HIGH);
// Делаем 50 шагов
for (int i = 0; i < 50; ++i) {
digitalWrite(stepPin, HIGH);
delay(delayTime);
digitalWrite(stepPin, LOW);
delay(delayTime);
}
// Ничего не делаем без отключения двигателя
delay(3000);
// Отключаем двигатель
digitalWrite(enablePin, LOW);
// Ничего не делаем до перезагрузки
while (true) {
;
}
}
Характеристики модуля
| Номинальное напряжение питания двигателя | 4,5–25 В |
| Пиковое напряжение на контактах Vin | 35 В |
| Напряжение питания логической части | 3,3–5 В |
| Длительно допустимый ток | до 600 мА |
| Пиковый ток | 1200 мА |
Ресурсы
Управление электродвигателем
Автор: admin6 Май
TC78H621FNG и TC78H611FNG от компании Toshiba выполнены по двухканальной H-мостовой схеме, использующей встроенные силовые DMOS-транзисторы в качестве выходных каскадов. Устройства способны управлять двумя коллекторными электродвигателями постоянного тока или одним биполярным шаговым двигателем.
Устройства способны управлять двумя коллекторными электродвигателями постоянного тока или одним биполярным шаговым двигателем.
TC78H621FNG управляется посредством сигналов разрешения (ENABLE) для каждого канала и поддерживает общие для обоих драйверов функции вращения по часовой / против часовой стрелки и останова, в то время как TC78H611FNG управляется установкой соответствующих логических уровней на входах IN1/IN2 и реализует дополнительную функцию торможения двигателя (Short Brake).
Читать далее »
25 Фев
Компания Toshiba приступила к выпуску новых контроллеров шаговых двигателей с напряжением питания 40 В и выходным током 3 А, поддерживающих работу без использования внешнего резистивного датчика тока. Интегрированная в устройство расширенная система детектирования тока (ACDS) исключает ошибки, связанные с допусками сопротивления резисторов, повышая точность и равномерность управления двигателем.
TB67S508FTG выпускается в корпусе размером 5 мм x 5 мм и, в отличие от типовых решений, имеющих размеры 7 мм x 7 мм и использующих внешние резисторы, позволяет экономить на стоимости комплектующих и уменьшить занимаемую площадь печатной платы на 34%. Встроенный силовой выходной каскад, выполненный на новейших DMOS-транзисторах, обеспечивает более высокий КПД решения, сокращает его размеры и упрощает систему охлаждения за счет меньшого выделения тепла. Эти транзисторы обладают очень низким сопротивлением открытого канала: суммарное сопротивление верхнего и нижнего плеча моста составляет 0.45 Ом.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
25 Фев
Недорогие, сверхвысоковольтные (UHV) микроконтроллеры предлагают однокристальное решение для простых систем управления электроприводом с рабочим напряжением 4. 5…18 В, позволяя снизить стоимость элементной базы за счет высокой степени интеграции.
5…18 В, позволяя снизить стоимость элементной базы за счет высокой степени интеграции.
Построенные на базе ядра HS08, микроконтроллеры серии MC9S08SUx обеспечивают высокий уровень производительности и низкую стоимость решения за счет применения усовершенствованного ЦПУ S08L, 3-фазной схемы управления силовыми ключами, поддерживающей три P-канальных MOSFET-транзистора верхнего плеча и три N-канальных MOSFET-транзистора нижнего плеча, операционных усилителей для измерения токов фазы и схем защиты от перегрузок по току и перенапряжения.
Читать далее »
- Комментарии отключены
- Рубрика: Freescale, NXP
10 Янв
Линейка высоковольтных интеллектуальных силовых устройств (HV-IPD) компании Toshiba позволяют повысить эффективность и сократить число внешних компонентов схемы управления бесколлекторными двигателями постоянного тока (BLDC).
TPD4206F представляет собой многокристальную микросхему, интегрирующую шесть силовых MOSFET-транзисторов с рабочим напряжением 500 В и выходным током 2.5 А, формирующую сигналы управления двигателем синусоидальной и трапецеидальной формы. Устройство идеально подходит для маломощных, малошумящих приложений управления электродвигателями мощностью до 80 Вт, включая промышленные вентиляторы и насосы, бытовые приборы и т.д. Высокий КПД прибора достигается за счет чрезвычайно низкого сопротивления открытого канала силовых транзисторов (RDS(ON) = 1.7 Ом) и малого теплового сопротивления корпуса.
Читать далее »
- Комментарии отключены
- Рубрика: Toshiba
10 Янв
Драйвер интегрирует два моста, каждый с независимым ШИМ-контроллером тока с постоянным временем открытого состояния силового ключа.
STSPIN240 оптимизирован для работы в системах с аккумуляторным питанием и может быть принудительно переведен в состояние с нулевым энергопотреблением, что позволяет значительно увеличить время работы от батареи. Устройство снабжено полным набором функций защиты: от перегрузок по току, перегрева и короткого замыкания.
Устройство снабжено полным набором функций защиты: от перегрузок по току, перегрева и короткого замыкания.
Читать далее »
10 Янв
TLE987x и TLE986x являются частью линейки встраиваемых силовых микросхем компании Infineon. Драйверы представляют собой однокристальные схемы управления 3- и 2-фазными электродвигателями, соответственно, интегрирующие промышленно стандартный микроконтроллер на базе ядра ARM® Cortex®-M3. Встроенный микроконтроллера позволяет реализовать расширенные алгоритмы управления двигателем, например, функцию управления по ориентации магнитного поля.
TLE986x интегрируют четыре, а TLE987x шесть драйверов управления затворами внешних силовых ключей на основе NFET-транзисторов, реализуя 2- или 3-фазную схему управления двигателем, а также схему накачки заряда, обеспечивающую работу прибора при низких напряжениях и возможность установки выходного тока драйвера, наряду с функцией управления длительностью фронта импульса, которая оптимизирует уровень электромагнитного излучения.
Читать далее »
- Комментарии отключены
- Рубрика: Infineon
с сопряжением с микроконтроллером AVR Atmega16
Шаговые двигатели — это бесщеточные двигатели постоянного тока, которые могут вращаться от 0 0 до 360 0 с шагом. Шаговый двигатель использует электронные сигналы для пошагового вращения двигателя, и каждый сигнал вращает вал с фиксированным шагом (один шаг). Угол поворота регулируется подачей определенной последовательности сигналов. В отличие от серводвигателя, шаговые двигатели могут приводиться в действие с помощью выводов GPIO микроконтроллера, а не выводов ШИМ, и могут вращаться в (+360 0 ) и (-360 0 ).Порядок сигналов определяет направление шагового двигателя по часовой стрелке и против часовой стрелки. Чтобы контролировать скорость двигателя, нам просто нужно изменить скорость подаваемых управляющих сигналов. Шаговые двигатели вращаются ступенчато. Существует несколько режимов работы шагового двигателя, таких как полный шаг, полушаг и микрошаг. Чтобы узнать больше об основах, теории и принципе работы шагового двигателя, перейдите по ссылке.
Существует несколько режимов работы шагового двигателя, таких как полный шаг, полушаг и микрошаг. Чтобы узнать больше об основах, теории и принципе работы шагового двигателя, перейдите по ссылке.
Мы ранее сопоставляли шаговый двигатель со многими микроконтроллерами:
В этом руководстве мы будем сопоставлять шаговый двигатель 28BYJ-48 с микроконтроллером AVR Atmega16 с помощью Atmel Studio 7.0. Шаговый двигатель рассчитан на работу при напряжении 5 В. Мы будем сопрягать шаговый двигатель с обоими драйверами двигателей, то есть ULN2003 и L293 . Оба будут питаться от источника питания 5 В. Чтобы упростить интерфейс, мы используем готовый модуль обоих драйверов двигателей. Вы также можете использовать автономные ИС ULN2003 и L293D. Количество проводов и перемычек может быть больше, поэтому будьте осторожны при подключении всех соединений.
Необходимые компоненты
- Шаговый двигатель (28BYJ-48)
- Модуль ULN2003 / Драйвер двигателя L293D
- Atmega16 Микроконтроллер IC
- Кварцевый генератор 16 МГц
- Два конденсатора по 100 нФ
- Два конденсатора 22 пФ
- Кнопка
- Провода перемычки
- Макет
- USBASP v2.
 0
0 - Светодиод (любой цвет)
Описание контактов шагового двигателя
Принципиальная схема управления шаговым двигателем с использованием модуля ULN2003
Подключите все компоненты, как показано на схеме ниже, при использовании ULN2003 . Точно так же мы будем взаимодействовать с ним с помощью L293D на следующем шаге. Мы используем ПОРТУ Atmega16 для сопряжения шагового двигателя с обоими драйверами двигателя. Нет необходимости подключать вывод 5V шагового двигателя.Для движения шагового двигателя требуются только штифты катушки. Порядок вывода очень важен для привода шагового двигателя, так как катушки должны быть запитаны для достижения ступенек. В этом проекте используются четыре входа ULN2003 и четыре выхода ULN2003. Входы будут подключены к контактам PORTA, а выходы будут подключены к контактам сигнала шагового двигателя. Кроме того, подключите одну кнопку к контакту сброса для сброса Atmega16, когда это необходимо. Подключите Atmega16 к правильной схеме кварцевого генератора.Вся система будет питаться от источника питания 5 В.
Подключите Atmega16 к правильной схеме кварцевого генератора.Вся система будет питаться от источника питания 5 В.
Ниже приведено фактическое изображение модуля драйвера двигателя ULN2003 :
Ниже мы показали соединения контактов Atmega16 с ULN2003 и L293D для вращения шагового двигателя. Взаимодействие шагового двигателя с модулем L293D объясняется в следующем разделе, помните, что для управления шаговым двигателем требуется только один модуль ULN2003 или L293D.
Контакты для ВХОДА следующие:
Атмега16 | ULN2003 | L293D |
A0 | IN1 (PIN1) | IN1 (PIN2) |
A1 | IN2 (PIN2) | IN2 (PIN7) |
A2 | IN3 (PIN3) | IN3 (PIN10) |
A3 | IN4 (PIN4) | IN4 (PIN15) |
Контакты для ВЫХОДА следующие:
Шаговый двигатель | ULN2003 | L293D |
Оранжевый | OUT1 (PIN16) | OUT1 (PIN3) |
Желтый | ВЫХ2 (PIN15) | OUT2 (PIN6) |
розовый | OUT3 (PIN14) | OUT3 (PIN11) |
Синий | OUT4 (PIN13) | OUT4 (PIN14) |
Принципиальная схема управления шаговым двигателем с помощью модуля L293D:
Управление шаговым двигателем с помощью AVR ATmega16
Как уже говорилось, в отличие от серводвигателя, шаговым двигателям требуются внешние драйверы.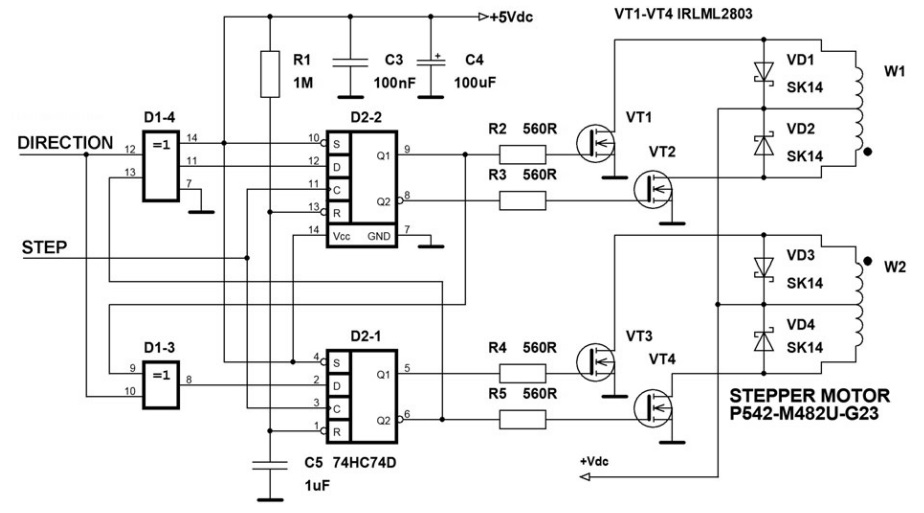 E.г. Драйвер двигателя ULN2003 или L293D. Поэтому просто подключите схему, как указано выше, и загрузите программу main.c, указанную в конце .
E.г. Драйвер двигателя ULN2003 или L293D. Поэтому просто подключите схему, как указано выше, и загрузите программу main.c, указанную в конце .
На рисунке показан шаговый двигатель, вращающийся в обе стороны, то есть по часовой стрелке и против часовой стрелки. Если вы хотите повернуть шаговый двигатель в одном направлении, просто закомментируйте строки кода другого направления в эскизе.
Полный код АРН для управления шаговым двигателем приведен ниже. Код прост и понятен. Ниже приведены два кода: один для вращающегося шагового двигателя с ULN2003, а второй с модулем L293D .
Подключите USBASP v2.0 и следуйте инструкциям по этой ссылке, чтобы запрограммировать микроконтроллер Atmega16 AVR с помощью USBASP и Atmel Studio 7.0 . Просто создайте эскиз и загрузите его, используя внешний набор инструментов.
Полный код с демонстрационным видео приведен ниже.
Шаговый двигатель, соединенный с микроконтроллером 8051 (AT89S52)
Шаговый двигатель — это бесщеточный двигатель постоянного тока, который можно вращать на небольшие углы, эти углы называются ступенями. Обычно шаговый двигатель использует 200 шагов для полного вращения на 360 градусов, что означает его вращение на 1,8 градуса за шаг. Шаговый двигатель используется во многих устройствах, которым требуется точное вращательное движение, таких как роботы, антенны, жесткие диски и т. Д. Мы можем повернуть шаговый двигатель на любой конкретный угол, дав ему соответствующие инструкции.
Обычно шаговый двигатель использует 200 шагов для полного вращения на 360 градусов, что означает его вращение на 1,8 градуса за шаг. Шаговый двигатель используется во многих устройствах, которым требуется точное вращательное движение, таких как роботы, антенны, жесткие диски и т. Д. Мы можем повернуть шаговый двигатель на любой конкретный угол, дав ему соответствующие инструкции.
Шаговые двигатели в основном бывают двух типов: униполярные и биполярные. Униполярный шаговый двигатель обычно имеет пять или шесть проводов, в которых четыре провода являются одним концом четырех катушек статора, а другой конец всех четырех катушек связан вместе, что представляет собой пятый провод, это называется общим проводом (общая точка).Обычно есть два общих провода, образованных путем соединения одного конца двух-двух катушек, как показано на рисунке ниже. Униполярный шаговый двигатель очень распространен и популярен из-за простоты использования.
В биполярном шаговом двигателе всего четыре провода выходят из двух наборов катушек, что означает отсутствие общего провода.
Шаговый двигатель состоит из статора и вращателя. Статор представляет собой четыре катушки электромагнита, которые остаются неподвижными вокруг ротатора, а ротатор представляет собой постоянный магнит, который вращается.Всякий раз, когда катушки возбуждаются путем подачи тока, создается электромагнитное поле, в результате чего вращается ротатор (постоянный магнит). Катушки должны быть запитаны в определенной последовательности, чтобы вращатель вращался. На основе этой «последовательности» мы можем разделить метод работы униполярного шагового двигателя на три режима: режим волнового привода, режим полного шага и режим полушагового привода.
Режим волнового возбуждения : в этом режиме одна катушка запитывается за раз, все четыре катушки запитываются одна за другой. Он производит меньший крутящий момент по сравнению с режимом полного шага, но потребляет меньше энергии. Ниже приведена таблица для создания этого режима с использованием микроконтроллера. Это означает, что нам нужно последовательно передать логику 1 на катушки.
Он производит меньший крутящий момент по сравнению с режимом полного шага, но потребляет меньше энергии. Ниже приведена таблица для создания этого режима с использованием микроконтроллера. Это означает, что нам нужно последовательно передать логику 1 на катушки.
Ступени | А | В | К | Д |
1 | 1 | 0 | 0 | 0 |
2 | 0 | 1 | 0 | 0 |
3 | 0 | 0 | 1 | 0 |
4 | 0 | 0 | 0 | 1 |
Режим полного привода: В этом режиме одновременно возбуждаются две катушки, создавая высокий крутящий момент. Потребляемая мощность выше. Нам нужно передать Logic 1 двум катушкам одновременно, затем следующим двум катушкам и так далее.
Потребляемая мощность выше. Нам нужно передать Logic 1 двум катушкам одновременно, затем следующим двум катушкам и так далее.
Ступени | А | В | К | Д |
1 | 1 | 1 | 0 | 0 |
2 | 0 | 1 | 1 | 0 |
3 | 0 | 0 | 1 | 1 |
4 | 1 | 0 | 0 | 1 |
Режим половинного привода: В этом режиме поочередно запитываются одна и две катушки, это означает, что сначала подается питание на одну катушку, затем на две катушки, затем снова на одну катушку, затем снова на две и так далее. Это комбинация режима полного и волнового привода, используемого для увеличения углового вращения двигателя.
Ступени | А | В | К | Д |
1 | 1 | 0 | 0 | 0 |
2 | 1 | 1 | 0 | 0 |
3 | 0 | 1 | 0 | 0 |
4 | 0 | 1 | 1 | 0 |
5 | 0 | 0 | 1 | 0 |
6 | 0 | 0 | 1 | 1 |
7 | 0 | 0 | 0 | 1 |
8 | 1 | 0 | 0 | 1 |
Подключение шагового двигателя к микроконтроллеру 8051
Связь с 8051 очень проста, нам просто нужно дать 0 и 1 четырем проводам шагового двигателя в соответствии с приведенными выше таблицами, в зависимости от того, в каком режиме мы хотим запустить шаговый двигатель. А остальные два провода должны быть подключены к правильному источнику питания 12 В (в зависимости от шагового двигателя). Здесь мы использовали униполярный шаговый двигатель. Мы подключили четыре конца катушек к первым четырем контактам порта 2 8051 через ULN2003A.
А остальные два провода должны быть подключены к правильному источнику питания 12 В (в зависимости от шагового двигателя). Здесь мы использовали униполярный шаговый двигатель. Мы подключили четыре конца катушек к первым четырем контактам порта 2 8051 через ULN2003A.
8051 не обеспечивает достаточный ток для управления катушками, поэтому нам нужно использовать ИС драйвера тока , которая называется ULN2003A . ULN2003A — это массив из семи пар транзисторов Дарлингтона NPN. Пара Дарлингтона построена путем соединения двух биполярных транзисторов для достижения высокого усиления тока.В ULN2003A 7 контактов являются входными контактами, 7 контактов — выходными контактами, два контакта предназначены для Vcc (источник питания) и заземления. Здесь мы используем четыре входных и четыре выходных контакта. Мы также можем использовать L293D IC вместо ULN2003A для усиления тока.
Вам нужно очень внимательно найти четыре провода катушки и два общих провода, иначе двигатель не будет вращаться. Узнать это можно, измерив сопротивление мультиметром, мультиметр не покажет никаких показаний между проводами двух фаз.Общий провод и два других провода в одной фазе должны иметь одинаковое сопротивление, а две конечные точки двух катушек в одной фазе будут иметь двойное сопротивление по сравнению с сопротивлением между общей точкой и одной конечной точкой.
Узнать это можно, измерив сопротивление мультиметром, мультиметр не покажет никаких показаний между проводами двух фаз.Общий провод и два других провода в одной фазе должны иметь одинаковое сопротивление, а две конечные точки двух катушек в одной фазе будут иметь двойное сопротивление по сравнению с сопротивлением между общей точкой и одной конечной точкой.
Устранение неисправностей
Если ваш двигатель не вращается ИЛИ не вибрирует, но не вращается, то вы должны проверить следующий контрольный список:
- Сначала проверьте соединения цепи и код.
- Если схема и код в порядке, убедитесь, что шаговый двигатель получает надлежащее напряжение питания (обычно 12 В), в противном случае он просто вибрирует, но не вращается.
- Если питание в норме, проверьте четыре конечные точки катушки, которые подключены к ULN2003A. Сначала найдите две общие конечные точки и подключите их к 12 В, затем подключите оставшиеся четыре провода к ULN2003A и пробуйте все возможные комбинации, пока двигатель не запустится.
 Если вы не подключите их в правильном порядке, двигатель просто будет вибрировать, а не вращаться.
Если вы не подключите их в правильном порядке, двигатель просто будет вибрировать, а не вращаться.
Вот код для ступенчатого режима волны и ступенчатого режима полной волны, вы можете легко вычислить значение для PORT P2 для полуволнового режима.
Шаговый двигатель, взаимодействующий с микроконтроллером 8051
Шаговый двигатель — это бесщеточный синхронный двигатель, который делит полное вращение на количество шагов. Каждый шаговый двигатель имеет фиксированный угол шага, и двигатель вращается под этим углом. В этой статье я покажу вам, как соединить шаговый двигатель с 8051, используя два разных драйвера: L293D и ULN 2003. Кроме того, здесь объясняется управление шаговым двигателем с помощью микроконтроллера 8051.
Управление шаговым двигателем с использованием принципа микроконтроллера 8051
Главный принцип этих схем — пошаговое вращение шагового двигателя на определенный угол шага.Микросхема ULN2003 и драйвер двигателя L293D используются для управления шаговым двигателем, поскольку контроллер не может обеспечить ток, необходимый для двигателя.
Также прочтите соответствующий пост — Управление скоростью двигателя постоянного тока на основе ШИМ с использованием микроконтроллера
Цепь 1: Управление шаговым двигателем с использованием микроконтроллера 8051 и L293D
Первая схема в этом проекте реализована с использованием микросхемы драйвера двигателя L293D. Поскольку драйвер двигателя L293D имеет возможность использовать четыре выходных контакта, с его помощью можно управлять только биполярным шаговым двигателем.
Принципиальная схемаПринципиальная схема взаимодействия биполярного шагового двигателя с микроконтроллером 8051 и драйвером двигателя L293D показана на изображении ниже.
Необходимые компоненты
- AT89C51 (микроконтроллер 8051)
- L293D Драйвер двигателя
- Биполярный шаговый двигатель 5 В
- 16X2 ЖК-дисплей Diaplay
- 11,0592 МГц Кварцевый кристалл
- Резисторы 10 кОм X 2
- 10 кОм POT
- Комплект резисторов 8x 1 кОм
- Керамические конденсаторы 33 пФ X 2
- Конденсатор 10 мкФ / 16 В
- Кнопки X 4
- Резистор 330 Ом
- Источник питания 5 В
Схема проектирования
Во-первых, выводы данных ЖК-дисплея подключаются к выводам PORT0 8051. Поскольку у PORT0 нет внутреннего подтягивания, для подтягивания PORT0 вверх используется блок резисторов. Контакты RS и E ЖК-дисплея подключены к P2.0 и P2.1 8051.
Поскольку у PORT0 нет внутреннего подтягивания, для подтягивания PORT0 вверх используется блок резисторов. Контакты RS и E ЖК-дисплея подключены к P2.0 и P2.1 8051.
Вывод RST опускается с помощью резистора 10 кОм. Комбинация кнопки и конденсатора 10 мкФ будет использоваться для сброса микроконтроллера. Кроме того, вывод EA подтягивается с помощью резистора 10 кОм.
Далее осциллятор. Он состоит из двух конденсаторов 33 пФ и кристалла 11,0592 МГц, подключенных между выводами XTAL1 и XTAL2 на 8051.
Что касается драйвера двигателя, то два контакта включения и два контакта питания подключены к источнику питания +5 В. Четыре входа подключены к контактам PORT1 8051, то есть P1.0, P1.1, P1.2 и P1.3. Четыре контакта биполярного шагового двигателя подключены к четырем выходным контактам L293D.
Для управления направлением шагового двигателя три кнопки подключены к контактам PORT3, то есть P3.0, P3.1 и P3.2.
КОД
рабочий
Работа этой схемы очень проста. В программе реализован метод, называемый Half-Stepping, для вращения шагового двигателя. При нажатии кнопки «Вперед» шаговый двигатель вращается по часовой стрелке.
В программе реализован метод, называемый Half-Stepping, для вращения шагового двигателя. При нажатии кнопки «Вперед» шаговый двигатель вращается по часовой стрелке.
Точно так же, когда кнопка «назад» нажата, она начинает вращаться против часовой стрелки. Чтобы полностью остановить вращение, вы можете нажать кнопку остановки.
Цепь 2: Управление шаговым двигателем с использованием микроконтроллера 8051 и ULN2003
Вторая схема в проекте предназначена для реализации управления шаговым двигателем с использованием микроконтроллера 8051 и ULN2003.Поскольку массив транзисторов ULN2003 состоит из 7 выходов, вы можете управлять как униполярными, так и биполярными шаговыми двигателями.
В этом проекте я покажу вам, как управлять 5-проводным униполярным шаговым двигателем с помощью микроконтроллера 8051 и транзисторной матрицы ULN2003.
Принципиальная схема На следующем изображении показана принципиальная схема взаимодействия шагового двигателя с микроконтроллером 8051 и ULN2003.
Принципиальная схема управления шаговым двигателем с использованием микроконтроллера AT89C51
Компоненты цепи
- AT89C51 Микроконтроллер
- ULN2003A
- Шаговый двигатель
- Кристалл
- Резистор
- Конденсатор
Схема проектирования
Схема состоит из микроконтроллера AT89C51, ULN2003A, Motor.AT89c51 — это маломощный, высокопроизводительный, 8-битный CMOS микроконтроллер семейства 8051. Он имеет 32 программируемых линии ввода / вывода. Он имеет 4 Кбайт программируемой и стираемой флэш-памяти. Внешний кварцевый генератор подключен к контактам 18 и 19 микроконтроллера. Двигатель подключен к порту 2 микроконтроллера через микросхему драйвера.
ULN2003A — это микросхема текущего драйвера. Он используется для управления током шагового двигателя, поскольку он требует тока более 60 мА. Это массив пар Дарлингтона.Он состоит из семи пар массивов Дарлингтона с общим эмиттером. ИС состоит из 16 контактов, из которых 7 являются входными контактами, 7 — выходными контактами, а остальные — VCC и заземлением. Первые четыре входных контакта подключены к микроконтроллеру. Таким же образом четыре выходных контакта подключаются к шаговому двигателю.
ИС состоит из 16 контактов, из которых 7 являются входными контактами, 7 — выходными контактами, а остальные — VCC и заземлением. Первые четыре входных контакта подключены к микроконтроллеру. Таким же образом четыре выходных контакта подключаются к шаговому двигателю.
Шаговый двигатель имеет 6 контактов. В этих шести контактах 2 контакта подключены к источнику питания 12 В, а остальные подключены к выходу шагового двигателя. Шаговый двигатель вращается на заданный угол шага.Каждый шаг вращения — это часть полного цикла. Это зависит от механических частей и способа вождения.
Как и все двигатели, шаговые двигатели будут иметь статор и ротор. Ротор имеет постоянный магнит, а статор имеет катушку. Базовый шаговый двигатель имеет 4 катушки с шагом поворота 90 градусов. Эти четыре катушки активируются в циклическом порядке. На рисунке ниже показано направление вращения вала. Есть разные методы управления шаговым двигателем. Некоторые из них описаны ниже.
Привод полного шага: В этом методе одновременно возбуждаются две катушки. Таким образом, здесь одновременно возбуждаются две противоположные катушки.
Half Step Drive: В этом методе катушки запитываются поочередно. Таким образом, он вращается с полушагом. В этом методе одновременно могут быть запитаны две катушки или одна катушка. Таким образом увеличивается количество оборотов за цикл. Это показано на рисунке ниже.
Видео моделирования цепиЗнаете ли вы, как вентилятор постоянного тока с регулируемой температурой работает с микроконтроллером AVR?
для взаимодействия шагового двигателя с 8051 и ULN2003
Как управлять этой схемой драйвера шагового двигателя?
- Сначала включите цепь.
- Микроконтроллер запускает шаговый двигатель.
- Наблюдается вращение шагового двигателя
- У шагового двигателя четыре провода. Они желтые, синие, красные и белые. Они запитываются альтернативно, как указано ниже.
- При движении с полным шагом используйте следующую последовательность
- Для вращения двигателя с полушагом используйте следующую последовательность:
- Он потребляет меньше энергии.
- Требуется низкое рабочее напряжение
Управление шаговым двигателем Приложения
- Эта схема может использоваться в роботизированных приложениях.
- Это также можно использовать в приложениях механтроники.
- Шаговые двигатели могут использоваться в дисководах, матричных принтерах и т. Д.
Управление двигателем | FOC | PMSM | BLDC | ACIM | Шаговый | BDC | Microchip Technology
Электродвигатели повсюду, делая нашу жизнь проще с каждым днем.Их можно найти в стиральной машине, сушилке, холодильнике, автомобиле, вентиляторе, насосах, кондиционере и огромном количестве других продуктов, где они должны работать с максимальной эффективностью, чтобы потреблять меньше энергии. От простейшей до наиболее продвинутой реализации, каждое приложение для управления двигателем имеет определенную комбинацию требований, включая производительность, надежность, эффективность и точность, а также размер, стоимость и время выхода на рынок. Если вы работаете над проектом, который включает двигатель, узнайте, как наш обширный набор продуктов и решений может помочь вам реализовать правильный тип управления для вашего приложения.
- Гибкие решения для надежного, высокоэффективного и точного управления двигателями, которые можно настроить в соответствии с вашими требованиями
- Портфель масштабируемой продукции включает микроконтроллеры (MCU) PIC ® , AVR ® , PIC32MK и SAM, DSPIC ® Контроллеры цифровых сигналов (DSC) и FPGA со специализированной периферией для управления двигателями различных типов
- motorBench ® Development Suite для автоматической настройки программного обеспечения Field-Oriented Control (FOC) и генерации кода для сокращения времени разработки
- As дополнительные устройства к нашим контроллерам, наши драйверы затворов MOSFET и однокристальные решения для управления двигателями и приводами двигателей обеспечивают полное системное решение
- Разнообразные ресурсы для обеспечения соответствия функциональной безопасности в ваших автомобильных, промышленных и потребительских приложениях
- Поддержка быстрого прототипирования с использованием инструмента моделирования MATLAB ® или Scilab ® s, сгенерируйте код управления двигателем непосредственно из вашей имитационной модели.
Мы также предлагаем множество масштабируемых инструментов разработки, включая опции для управления двумя двигателями, для быстрого прототипирования систем низкого и высокого напряжения.Наше бесплатное программное обеспечение для управления двигателем, примечания по применению и руководства по настройке также ускорят вашу разработку, снизив при этом риски. Если вам нужна помощь в дизайне, мы предоставляем техническую поддержку и различные учебные ресурсы, которые помогут вам, или вы можете связаться с одним из наших авторизованных партнеров по дизайну, чтобы воспользоваться их техническим опытом.
Блоки управления шаговым двигателем, использующие микроконтроллер Atmega AVR
Электрическая машина, преобразующая электрическую энергию в механическую, называется электродвигателем.В первую очередь электродвигатель — это простое электростатическое устройство, созданное шотландским монахом Эндрю Гордоном в 1740-х годах. Но в 1821 году Майкл Фарадей продемонстрировал преобразование электрической энергии в механическую.
Электродвигатели в основном подразделяются на две категории: двигатели переменного тока и двигатели постоянного тока. Опять же, каждая категория подразделяется на множество типов. Многие нагрузки, такие как миксер, кофемолка, вентиляторы и т. Д., Являются наиболее часто используемыми бытовыми приборами, в которых мы можем найти различные типы двигателей, и они могут работать на разных скоростях с возможностью регулирования скорости двигателей.В этой статье мы собираемся обсудить один из основных типов двигателей постоянного тока, а именно шаговый двигатель и его управление с помощью микроконтроллера.
Шаговый двигатель
Синхронный бесщеточный двигатель постоянного тока, который преобразует электрические импульсы в механические движения и, таким образом, вращается ступенчато с определенным углом между каждым шагом для завершения полного вращения, называется шаговым двигателем. Угол между ступенями вращения шагового двигателя называется углом шагового двигателя.
Шаговый двигательШаговые двигатели подразделяются на два типа в зависимости от их обмотки: униполярные шаговые двигатели и биполярные шаговые двигатели. Униполярный шаговый двигатель часто используется во многих приложениях из-за его простоты в эксплуатации по сравнению с биполярным шаговым двигателем. Но существуют разные типы шаговых двигателей, такие как шаговый двигатель с постоянным магнитом, шаговый двигатель с переменным сопротивлением и гибридный шаговый двигатель.
Управление шаговым двигателем
Шаговым двигателем можно управлять с помощью различных методов, но здесь мы обсуждаем управление шаговым двигателем с помощью микроконтроллера Atmega.89C51 — это микроконтроллер из семейства микроконтроллеров 8051.
Блок-схема управления шаговым двигателемБлок-схема управления шаговым двигателем с использованием микроконтроллера 8051 показана на рисунке с блоком питания, микроконтроллера, шагового двигателя и блоков управления.
2 метода конструирования схемы управления шаговым двигателем
Контроллер шагового двигателя разработан с использованием микроконтроллеров 8051 и схемы переключения для управления скоростью шагового двигателя.Схема управляющего переключателя может быть разработана с использованием транзисторных переключателей или с помощью IC контроллера шагового двигателя, такого как ULN2003, вместо транзисторов.
1. Схема управления с использованием контроллера шагового двигателя IC
Униполярный шаговый двигатель может вращаться путем последовательного включения катушек статора. Последовательности этих сигналов напряжения, приложенных к катушкам или проводам двигателя, достаточно для управления двигателем и, следовательно, не требуется никакой схемы управления для управления направлением тока в катушках статора.
Управление шаговым двигателем с использованием ICДвухфазный шаговый двигатель состоит из четырех концевых проводов, соединенных с катушками, и двух общих проводов, соединенных с двумя концевыми выводами, чтобы образовать две фазы. Общие точки и конечные точки двух фаз соединены с землей или выводами Vcc и микроконтроллера соответственно. Для вращения двигателя конечные точки двух фаз должны быть под напряжением. В первую очередь напряжение прикладывается к первой конечной точке фазы 1, а дополнительное напряжение прикладывается к первой конечной точке фазы 2 и так далее.
Шаговый двигатель может работать в различных режимах, таких как пошаговый режим волнового привода, шаговый режим полного привода и шаговый режим половинного привода.
Тактовый режим волнового привода
Повторяя указанную выше последовательность, двигатель можно вращать в пошаговом режиме волнового привода либо по часовой стрелке, либо против часовой стрелки в зависимости от выбора конечных точек. В таблице ниже показана последовательность фаз сигнала для волнового пошагового режима.
Wave Drive Stepping ModeFull Drive Stepping Mode
При одновременном включении двух конечных точек различных фаз достигается пошаговый режим с полным приводом.В таблице показана последовательность фаз сигнала для пошагового режима полного привода.
Тактовый режим с полным приводомШаговый режим с половинным приводом
Комбинация шагов волнового и полного шагового режимов позволяет получить пошаговый режим с половинным приводом. Таким образом, в этом режиме шаговый угол делится пополам. В таблице показана последовательность фаз сигнала в пошаговом режиме с половинным приводом.
Шаговый режим половинного приводаВ общем, угол шага зависит от разрешения шагового двигателя.Размер шагов и направление вращения прямо пропорциональны количеству и порядку входной последовательности. Скорость вращения вала зависит от частоты входной последовательности. Крутящий момент и количество одновременно намагничиваемых магнитов пропорциональны.
Шаговый двигатель требует тока 60 мА, но максимальный номинальный ток микроконтроллера Atmega AT89C51 составляет 50 мА. Итак, контроллер шагового двигателя IC используется для сопряжения шагового двигателя с микроконтроллером для передачи сигналов.
2. Схема переключателя управления с использованием транзисторов
Электропитание схемы может быть обеспечено путем понижения напряжения с 230 В до 7,5 В с помощью понижающего трансформатора, а затем выпрямления с помощью мостового выпрямителя с диодами. Этот выпрямленный выходной сигнал подается на конденсатор фильтра, а затем проходит через регулятор напряжения. Стабилизированный выход 5 В получается от регулятора напряжения. Вывод сброса 9 подключен между конденсатором и резистором.
Схема управления шаговым двигателем с использованием транзистораОбычно шаговый двигатель состоит из четырех катушек, как показано на рисунке.Итак, для управления двигателем требуются четыре схемы управления двигателем. Вместо использования микросхемы контроллера шагового двигателя для управления двигателем, четыре транзистора подключены в качестве схем управления к 21, 22, 23 и 24 контактам микроконтроллера соответственно.
Если транзисторы начинают проводить ток, вокруг катушки создается магнитное поле, вызывающее вращение двигателя. Скорость шагового двигателя прямо пропорциональна частоте входных импульсов. К контактам 18 и 19 подключен кварцевый генератор, обеспечивающий тактовую частоту микроконтроллера около 11.019 МГц.
Время выполнения любой инструкции можно рассчитать по следующей формуле
Time = ((C * 12)) / f
Где C = номер цикла
и F = частота кристалла
Один из Схема на основе приложения, в которой используется шаговый двигатель для вращения солнечной панели, описана ниже.
Управление шаговым двигателем с использованием программного микроконтроллера 8051
Проект солнечной панели с отслеживанием солнца предназначен для выработки максимального количества энергии путем автоматической регулировки солнечной панели.В этом проекте шаговый двигатель, управляемый программируемым микроконтроллером семейства 8051, подключен к солнечной панели, чтобы поверхность солнечных панелей всегда была перпендикулярна солнцу.
Управление шаговым двигателем с использованием микроконтроллера от Edgefxkits.comЗапрограммированный микроконтроллер генерирует ступенчатые электрические импульсы через равные промежутки времени для шагового двигателя для вращения солнечной панели. ИС драйвера используется для управления шаговым двигателем, поскольку контроллер не может обеспечить требуемую мощность двигателя.
Пожалуйста, оставляйте свои предложения, отзывы и вопросы, оставляя комментарии в разделе комментариев ниже. Мы сделаем все возможное, чтобы помочь вам технически в отношении этой статьи и разработки проектов электротехники и электроники с использованием шагового двигателя.
Шаговый двигатель: основы, типы, режимы, подключение, вопросы
Шаговый двигатель — это цифровое устройство. Цифровая информация обрабатывается шаговым двигателем для достижения конечного результата, в данном случае управляемого движения. Можно предположить, что шаговый двигатель будет надежно следовать цифровым инструкциям, как ожидается от компьютера.Это отличительная черта шагового двигателя.
Шаговый двигатель — это электродвигатель, который приводится в действие цифровыми импульсами, а не постоянным напряжением. Неотъемлемой частью этой концепции является управление без обратной связи, при котором последовательность импульсов преобразуется в такое количество оборотов вала, при этом каждый оборот требует заданного количества импульсов.
Каждый импульс равен одному вращательному приращению или шагу (отсюда и название шаговый, шаговый или шаговый двигатель), который является лишь частью одного полного вращения.
Следовательно, в шаговом двигателе могут применяться счетные импульсы для достижения желаемой величины вращения вала. Подсчет автоматически показывает, сколько движения было достигнуто, без необходимости обратной связи, как это было бы в сервосистемах и других технологиях.
Хотя это и не требуется, большинство шаговых двигателей при желании могут иметь энкодер.
Примечание. В данном описании шаговый двигатель, шаговый двигатель и двигатели используются как взаимозаменяемые.
Приложения для шагового двигателя
Хотя в прошлом шаговые двигатели уступали место сервосистемам для управления движением, они стали предпочтительной технологией во все большем количестве областей.
Основным фактором в этой тенденции к шаговым двигателям является преобладание цифрового управления, появление микропроцессоров, улучшенная конструкция, то есть модели с высоким крутящим моментом, и более низкая стоимость.
Сегодня шаговые двигатели используются повсюду: они используются в принтерах (подача бумаги, печатное колесо), дисковых накопителях, часах и часах, а также используются в промышленной автоматизации и машиностроении.
Применение серводвигателявключает промышленные компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, требования к этикетированию или защите от несанкционированного вскрытия, приложения для резки по длине, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку и проектирование. эффекты, медицинская диагностика, слежение за камерой, устройства контроля и безопасности, средства управления самолетом, управление потоком насосов, изготовление металла (станки с ЧПУ) и модернизация оборудования.
Шаговый двигатель чаще всего встречается в системах управления движением, требующих управления положением.
Также читайте: Шаговые двигатели: объективные вопросы и ответы
Типы шаговых двигателей
Существует три основных типа шаговых двигателей. Эти типы шаговых двигателей различаются по конструкции и принципам работы. Каждый тип шагового двигателя предлагает свое решение для приложения. Три основных типа шаговых двигателей включают переменное сопротивление, постоянный магнит и гибридный двигатель.
1. Шаговый двигатель с переменным сопротивлением (VR)
Шаговый двигатель с регулируемым сопротивлением известен своей многороторной конструкцией из мягкого железа и конструкцией статора с обмоткой.
Шаговый двигатель с регулируемым сопротивлением обычно работает с углами шага от 5 до 15 градусов при относительно высокой скорости шага. У них также нет фиксирующего момента.
2. Шаговый двигатель с постоянным магнитом (PM)
Шаговый двигатель с постоянным магнитом отличается от шагового двигателя с регулируемым сопротивлением тем, что у него отсутствуют роторы с постоянными магнитами.Эти роторы намагничены перпендикулярно оси. При последовательном включении четырех фаз ротор вращается, притягиваясь к магнитным полюсам.
Шаговый двигатель с постоянным магнитом обычно имеет углы шага от 45 до 90 градусов и имеет тенденцию к шагу с относительно низкой скоростью, но обеспечивает высокий крутящий момент и отличные характеристики демпфирования.
3. Гибридный шаговый двигатель
Гибридный шаговый двигатель сочетает в себе качества шаговых двигателей с постоянным магнитом и переменного магнитного сопротивления.Гибридный шаговый двигатель обладает некоторыми достоинствами каждого из них. Шаговые двигатели этого типа обладают высоким фиксирующим моментом, отличным удерживающим и динамическим крутящим моментом, а также могут работать с высокими шаговыми скоростями.
Углы шага от 0,9 до 5,0 градусов обычно наблюдаются в гибридных шаговых двигателях. На этот шаговый двигатель обычно подаются бифилярные обмотки, так что один источник питания может использоваться для питания шагового двигателя.
Ротор будет вращаться с шагом 1,8 градуса, если фазы запитаны по очереди в указанном порядке a.Этот шаговый двигатель может работать в двух фазах одновременно для увеличения крутящего момента. Гибридный шаговый двигатель также может приводиться в действие одной, затем двумя, а затем одной фазой для получения полушагов с шагом 0,9 градуса.
Режимы шагового двигателя
Существует три режима возбуждения, которые обычно используются с шаговым двигателем. Эти режимы шагового двигателя представляют собой полушаговый, полушаговый и микрошаговый режимы.
1. Шаговый двигатель — полный шаг
В режиме полного шага шаговый двигатель проходит через нормальный угол шага, т.е.г. Двигатели с шагом 200 / оборот делают 1,8 шага, а в полушаговом режиме — 0,9 шага. Есть два вида полношаговых режимов.
Однофазное полноступенчатое возбуждение — это когда шаговый двигатель работает только с одной фазой, находящейся под напряжением одновременно. Этот режим следует использовать только в приложениях, где характеристики крутящего момента и скорости не важны, где двигатель работает с фиксированной скоростью и условия нагрузки четко определены.
Обычно шаговые двигатели используются в полношаговом режиме в качестве замены в существующих системах движения и не используются в новых разработках.Проблемы с резонансом могут препятствовать работе на некоторых скоростях. Этот тип режима требует наименьшего количества энергии от источника питания привода из любого из режимов возбуждения.
Двухфазное полноступенчатое возбуждение — это когда шаговый двигатель работает с двумя фазами, запитанными одновременно. Этот режим обеспечивает хорошие характеристики крутящего момента и скорости с минимумом проблем с резонансом.
Примечание: Двойное возбуждение, обеспечивает на 30-40 процентов больше крутящего момента, чем одинарное возбуждение, но требует вдвое большей мощности от источника питания привода.Многие микрошаговые драйверы при необходимости могут быть установлены в полношаговый режим.
2. Шаговый двигатель — полушаг
Полушаговое возбуждение шагового двигателя — это попеременная одно- и двухфазная работа, приводящая к шагам, равным половине нормального размера шага.
Следовательно, этот режим обеспечивает вдвое большее разрешение. Хотя выходной крутящий момент двигателя меняется на чередующихся ступенях, это более чем компенсируется необходимостью пройти только половину угла. Этот режим предлагает почти полную свободу от проблем с резонансом.
Шаговый двигатель может работать в широком диапазоне скоростей и использоваться для привода практически любой обычно встречающейся нагрузки. Хотя полушаговые драйверы по-прежнему остаются популярным и доступным выбором, многие новые микрошаговые драйверы являются экономичной альтернативой.
3. Шаговый двигатель — Microstep
В режиме микрошага шагового двигателя естественный угол шага шагового двигателя можно разделить на гораздо меньшие углы.
Например, стандартный двигатель 1,8 градуса имеет 200 шагов / оборот.Если в двигателе микрошаг с «делением на 10», то каждый микрошаг перемещает двигатель на 0,18 градуса, что составляет 2000 шагов / оборот.
Микрошаги получаются путем пропорционального распределения тока в двух обмотках в соответствии с функциями синуса и косинуса. Этот режим используется только там, где требуется более плавное движение или большее разрешение.
Как правило, режимы микрошага варьируются от деления на 10 до деления на 256 (51 200 шагов / оборот для двигателя 1,8 градуса).
Некоторые микрошаговые драйверы имеют фиксированный делитель, тогда как более дорогие микрошаговые драйверы предусматривают возможность выбора делителей.
Примечание: В целом, чем больше предусмотрен делитель микрошага, тем дороже драйвер шагового двигателя.
Обратная связь шагового двигателя
Шаговый двигатель обычно управляется драйвером и индексатором / контроллером. Количество, скорость и направление вращения шагового двигателя определяется конкретной конфигурацией цифровых устройств управления.
Основными типами устройств управления шаговыми двигателями являются: драйверы шаговых двигателей и контроллеры шаговых двигателей, которые включают индексаторы и генераторы импульсов.
Драйвер шагового двигателя принимает тактовые импульсы и сигналы направления и преобразует эти сигналы в соответствующие фазовые токи для шагового двигателя.
Индексатор шагового двигателя создает тактовые импульсы и сигналы направления для шагового двигателя. Компьютер или ПЛК (программируемый логический контроллер) отправляет команды индексатору или контроллеру.
Требования к окружающей среде шагового двигателя
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы шагового двигателя.
Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании шагового двигателя, драйвера и контроллера. Обратите внимание, что даже хорошо построенный шаговый двигатель, работающий и неправильно установленный, может быть опасен в определенных случаях.
Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. Конечный пользователь несет полную ответственность за правильный выбор, установку и работу системы шагового двигателя.
Атмосфера, в которой используется шаговый двигатель, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием. Не эксплуатируйте шаговый двигатель в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги.
При использовании на открытом воздухе шаговый двигатель, драйвер и контроллер должны быть защищены от элементов соответствующим кожухом, обеспечивая при этом достаточный воздушный поток и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы.
Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если ваше приложение требует определенных IP-адресов. Разумно устанавливать шаговый двигатель, драйвер и контроллер в среде, свободной от конденсата, пыли, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой шагового двигателя / драйвера / контроллера в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением.
Никакие работы не должны выполняться при включенном питании. Не подключайте и не отключайте разъемы при включенном питании. Подождите не менее 5 минут перед проведением проверок системы шагового двигателя после выключения питания, потому что даже после выключения питания в конденсаторах внутренней цепи драйвера шагового двигателя все еще остается некоторая электрическая энергия.
Спланируйте установку шагового двигателя, драйвера и / или контроллера в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с цепью .Если не предотвратить попадание мусора в систему шагового двигателя, это может привести к повреждению и / или удару.
Электропроводка шагового двигателя
Следующая информация предназначена в качестве общего руководства по подключению шаговых двигателей.
Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может быть внесен в сигналы шагового двигателя и энкодера, входы / выходы и другие чувствительные малые сигналы напряжения.Это может вызвать сбои системы и ошибки связи.
ПРЕДУПРЕЖДЕНИЕ — В системе шагового двигателя может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации.
Не допускайте чрезмерных корректировок или изменений параметров системы шагового двигателя, поскольку это может вызвать механическую вибрацию и привести к поломке и / или потере. После подключения шагового двигателя не запускайте драйвер шагового двигателя путем непосредственного включения / выключения источника питания.
Частое включение / выключение питания вызывает быстрое старение внутренних компонентов, что сокращает срок службы системы шагового двигателя.
Строго соблюдайте следующие правила:
- Следуйте электрической схеме для каждого шагового двигателя
- Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
- Отделите входную силовую проводку и силовые кабели шагового двигателя от проводки управления и кабелей обратной связи двигателя, когда они выходят из привода шагового двигателя.Сохраняйте это разделение на всем протяжении провода.
- Используйте экранированный кабель для силовой проводки и обеспечьте заземленное зажимное соединение на 360 градусов к стене корпуса. Оставьте на субпанели место для изгибов проводов.
- Сделайте все кабельные трассы как можно короче.
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших шаговых двигателях и системах драйверов. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех.
Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы шагового двигателя и пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы шагового двигателя и системы привода перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Рис: Анимация шагового двигателя
Крепление шагового двигателя
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы шагового двигателя.
ПРЕДУПРЕЖДЕНИЕ — В системе шагового двигателя может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и установке очень важно учитывать подключение шагового двигателя и драйвера.
Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы шаговых двигателей, должны иметь плоскую жесткую поверхность, не подверженную ударам, вибрации, влаге, маслу, парам или пыли.
Помните, что шаговый двигатель и драйвер выделяют тепло во время работы; поэтому при проектировании компоновки системы следует учитывать рассеивание тепла.Размер шкафа должен быть таким, чтобы не превышать максимально допустимую температуру окружающей среды.
Рекомендуется устанавливать драйвер и контроллер шагового двигателя в положение, обеспечивающее достаточный воздушный поток. Шаговый двигатель должен быть установлен устойчиво и надежно закреплен, чтобы минимизировать вибрацию.
ПРИМЕЧАНИЕ: Между приводом шагового двигателя и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 3 дюймов. Если вы используете реле в вашей системе управления движением, позаботьтесь о защите реле, шагового драйвера и контроллера и всегда прокладывайте эти провода отдельно.При использовании реле постоянного тока установите диод на катушку, а при использовании реле переменного тока обязательно используйте MOV.
ПРИМЕЧАНИЕ: Чтобы соответствовать требованиям UL и CE, система шагового двигателя должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 6052 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора. или неквалифицированный человек.
Как и любая движущаяся часть системы, шаговый двигатель следует держать вне досягаемости оператора.Корпус NEMA 4X превосходит эти требования, обеспечивая защиту IP66. Чтобы улучшить соединение между шиной питания и вспомогательной панелью, сконструируйте вспомогательную панель из оцинкованной (не содержащей краски) стали.
Кроме того, настоятельно рекомендуется защитить драйвер и / или контроллер шагового двигателя от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Также читайте: Разница между шаговым двигателем и серводвигателем
Распространенные причины отказа шагового двигателя и / или шагового драйвера
Примечание: Всегда читайте спецификации / руководство пользователя, прилагаемые к каждому устройству.
Проблема: Непостоянная или неустойчивая работа шагового двигателя или шагового привода.
Решение: Это наиболее частая причина отказа и одна из самых трудных для обнаружения. Начните с проверки, чтобы убедиться, что все соединения между шаговым двигателем и драйвером шагового двигателя и контроллерами плотно затянуты.
Обесцвечивание клемм / соединений может указывать на неплотное соединение. При замене шагового двигателя, шагового драйвера, пакета драйверов или контроллера в системе управления движением обязательно проверьте все клеммные колодки и разъемы.
Проверить правильность проводки / разводки. Нагрузите проводку и соединения шагового двигателя на худшие условия и проверьте с помощью омметра. По возможности используйте экранированные кабели для подключения шагового двигателя.
Проблема: Провода шагового двигателя были отсоединены при включении драйвера.
Решение: Избегайте обслуживания шагового двигателя, драйвера или контроллера при включенном питании, особенно в том, что касается соединений двигателя. Эта мера предосторожности является обязательной как для водителя, так и для техника / установщика.
Проблема: Низкая производительность системы.
Решение: Проверьте, не слишком ли длинные провода / кабели. Длина провода / кабеля шагового двигателя не должна превышать 25 футов. Для приложений, где длина проводки от шагового двигателя к шаговому приводу превышает 25 футов, пожалуйста, свяжитесь с заводом-изготовителем для получения инструкций, так как вполне вероятно, что потребуются устройства защиты от переходных напряжений.
Другая возможность заключается в том, что провода шагового двигателя слишком малы.Не совмещайте провода кабеля с калибром проводов шагового двигателя. Это частая ошибка, поэтому мы предлагаем использовать для такой разводки экранированный кабель.
Кроме того, проверьте возраст вашего шагового двигателя, так как со временем и использованием шаговые двигатели теряют часть своего магнетизма, что влияет на производительность.
Обычно можно ожидать 10 000 часов работы для шаговых двигателей (примерно 4,8 года при одной восьмичасовой смене в рабочий день).
Также убедитесь, что комбинация шагового двигателя и драйвера подходит для вашего приложения.Свяжитесь с заводом, если у вас возникнут какие-либо вопросы.
Проблема: У шагового двигателя короткое замыкание обмотки или замыкание на корпус двигателя.
Решение: Вероятно, у вас неисправен шаговый двигатель. Не пытайтесь ремонтировать моторы. Открытие корпуса шагового двигателя может привести к размагничиванию двигателя и снижению его производительности.
Открытие корпуса шагового двигателя также аннулирует вашу гарантию. Обмотки двигателя можно проверить омметром.
Проблема: Драйвер шагового двигателя или пакет драйверов перегревается.
Решение: Помещения для вентиляции и охлаждения необходимы — отсутствие достаточного воздушного потока повлияет на работу драйвера шагового двигателя и сократит срок его службы. Поддерживайте температуру драйвера ниже 60 градусов Цельсия.
Для поддержания хорошего воздушного потока используйте вентиляторы, теплоотвод и опорные пластины, чтобы не превышать максимально допустимую температуру шаговых двигателей, драйверов или контроллеров. Помните о температуре внутри шкафов и корпусов, где могут быть установлены шаговые драйверы.
Примечание: Окрашенные поверхности не делают , а не хорошим теплоотводящим материалом для драйверов и контроллеров шаговых двигателей. Также убедитесь, что в окружающей среде нет пыли и мусора, которые могут засорить систему с вентиляторным охлаждением.
Проблема: Факторы окружающей среды не идеальны.
Решение: Факторы окружающей среды, такие как сварка, химические пары, влажность, влажность, пыль, металлический мусор и т. Д., Могут повредить как электронику, так и шаговый двигатель.
Защищайте драйверы, контроллеры и шаговые двигатели от агрессивных сред, содержащих скачки напряжения или препятствующих хорошей вентиляции.
По вопросам промывки или взрывозащищенных двигателей обращайтесь напрямую на завод. Для линий переменного тока, содержащих скачки напряжения, скорее всего, потребуется линейный стабилизатор (фильтр).
Примечание: Если ваше приложение требует сварки или если сварка выполняется в той же рабочей среде, обратитесь на завод за советом о том, как защитить драйвер и контроллер шагового двигателя.
Проблема: Частота импульсов (тактовая частота или шаг) для драйвера слишком высока.
Решение: Типичный драйвер полушага может управлять шаговым двигателем с максимальной частотой 20 000 импульсов в секунду. Частота импульсов более 60 000 импульсов в секунду может повредить драйвер.
См. Отдельные листы спецификаций комбинации двигателя и привода для достижения наилучших характеристик.
Проблема: Шаговый двигатель останавливается.
Решение: В некоторых случаях остановка шагового двигателя вызывает большой скачок напряжения, который часто повреждает фазовые транзисторы в драйвере.
Некоторые драйверы предназначены для защиты от подобных ситуаций. Если нет, устройства подавления переходных процессов могут быть добавлены извне. Проконсультируйтесь с заводом-изготовителем для получения дополнительной информации.
Проблема: Шаговый двигатель вращает шаговый драйвер назад.
Решение: Шаговый двигатель, который вращается нагрузкой, создает напряжение обратной ЭДС на драйвере. Чем выше скорость, тем выше уровень напряжения.
Если частота вращения становится очень высокой, это напряжение может вызвать повреждение драйвера.Это особенно опасно, когда двигатель работает в обратном направлении, а водитель все еще включен. Установите механический упор или тормоз в приложениях, которые могут быть подвержены этим явлениям.
Общие правила техники безопасности при использовании шаговых двигателей
Следующие меры безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта. Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании шагового двигателя, драйвера и контроллера.
Пользователь должен соблюдать меры безопасности в отношении нагрузки и условий эксплуатации.
Вкратце:
- Соблюдайте осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации
- Обслуживание не должно выполняться при включенном питании
- Открытые цепи должны быть надлежащим образом ограждены или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением
- Все блоки должны быть надежно закреплены и заземлены.
- Обеспечьте соответствующий воздушный поток и отвод тепла
- Не работать в присутствии легковоспламеняющихся газов, паров, жидкостей или пыли
Статья Источник: Anaheim Automation
.