Что такое бесколлекторный двигатель?
Типы моторов?
Двигатели/моторы в мультироторных аппаратах бывают двух типов:
- Коллекторные/Brushed (др. названия: DC)/Сoreless.
- Бесколлекторные/Brushless.
Их главное отличие в том, что у коллекторного двигателя обмотки находятся на роторе (вращающейся части), а у бесколлекторного — на статоре. Не вдаваясь в подробности скажем, что бесколлекторный двигатель предпочтительнее коллекторного поскольку наиболее удовлетворяет требованиям, ставящимся перед ним. Поэтому в этой статье речь пойдёт именно о таком типе моторов. Подробно о разнице между бесколлекторными и коллекторными двигателями можно прочесть в этой статье.
Несмотря на то, что применяться БК-моторы начали сравнительно недавно, сама идея их устройства появилась достаточно давно. Однако именно появление транзисторных ключей и мощных неодимовых магнитов сделало возможным их коммерческое использование.
Устройство БК — моторов
Конструкция бесколлекторного двигателя состоит из ротора на котором закреплены магниты и статора на котором располагаются обмотки. Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
Как раз по взаиморасположению этих компонентов БК-двигатели делятся на inrunner и outrunner.
В мультироторных системах чаще применяется схема Outrunner, поскольку она позволяет получать наибольший крутящий момент.
Плюсы и минусы БК — двигателей
Плюсы:
- Упрощённая конструкция мотора за счёт исключения из неё коллектора.
- Более высокий КПД.
- Хорошее охлаждение.
- БК-двигатели могут работать в воде! Однако не стоит забывать, что из-за воды на механических частях двигателя может образоваться ржавчина и он сломается через какое-то время. Для избежания подобных ситуаций рекомендуется обрабатывать двигатели водоотталкивающей смазкой.
- Наименьшие радиопомехи.
Минусы:
Из минусов можно отметить только невозможность применения данных двигателей без ESC (регуляторы скорости вращения). Это несколько усложняет конструкцию и делает БК-двигатели дороже коллекторных. Однако если сложность конструкции является приоритетным параметром, то существуют БК-двигатели с встроенными регуляторами скорости.
Как выбрать двигатели для коптера?
При выборе бесколлекторных двигателей в первую очередь следует обратить внимание на следующие характеристики:
- Максимальный ток — эта характеристика показывает какой максимальный ток может выдержать обмотка двигателя за небольшой промежуток времени. Если превысить это время, то неизбежен выход двигателя из строя. Так же этот параметр влияет на выбор ESC.
- Максимальное напряжение — так же как и максимальный ток, показывает какое напряжение можно подать на обмотку в течение короткого промежутка времени.
- KV — количество оборотов двигателя на один вольт. Поскольку этот показатель напрямую зависит от нагрузки на вал мотора, то его указывают для случая, когда нагрузки нет.
- Сопротивление — от сопротивления зависит КПД двигателя. Поэтому чем сопротивление меньше — тем лучше.
Бесколлекторные двигатели постоянного тока. Что это такое? — Avislab
Этой статьёй я начинаю цикл публикаций о бесколлекторных двигателях постоянного тока. Доступным языком опишу общие сведения, устройство, алгоритмы управления бесколлекторным двигателем. Будут рассмотрены разные типы двигателей, приведены примеры подбора параметров регуляторов. Опишу устройство и алгоритм работы регулятора, методику выбора силовых ключей и основных параметров регулятора. Логическим завершением публикаций будет схема регулятора.
Бесколлекторные двигатели получили широкое распространение благодаря развитию электроники и, в том числе, благодаря появлению недорогих силовых транзисторных ключей. Также немаловажную роль сыграло появление мощных неодимовых магнитов.
Однако не стоит считать бесколлекторный двигатель новинкой. Идея бесколлекторного двигателя появилась на заре электричества. Но, в силу неготовности технологий, ждала своего времени до 1962 года, когда появился первый коммерческий бесколлекторный двигатель постоянного тока. Т.е. уже более полувека существуют различные серийные реализации этого типа электропривода!
Немного терминологии
Бесколлекторные двигатели постоянного тока называют так же вентильными, в зарубежной литературе BLDCM (BrushLes Direct Current Motor) или PMSM (Permanent Magnet Synchronous Motor).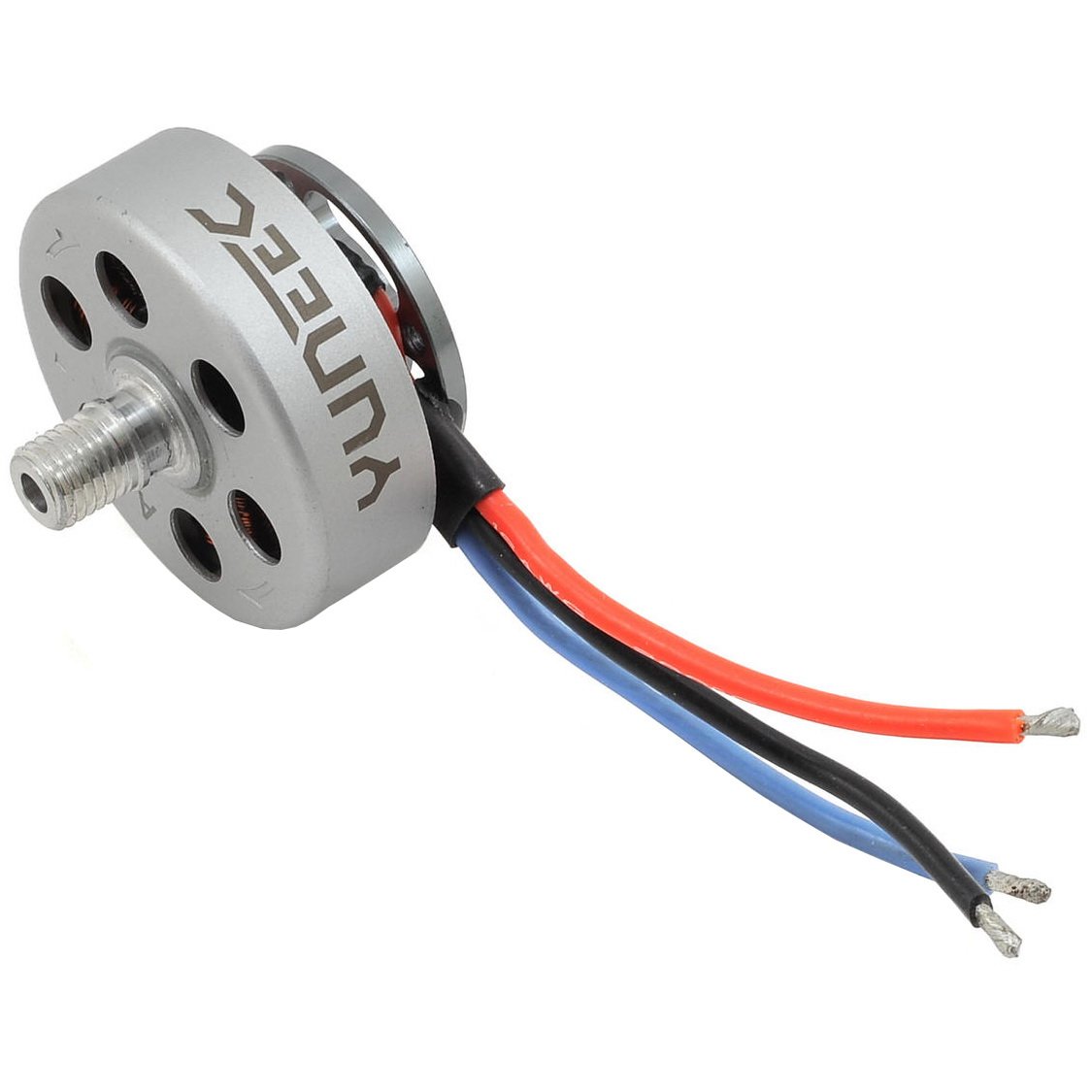
Конструктивно бесколлекторный двигатель состоит из ротора с постоянными магнитами и статора с обмотками. Обращаю Ваше внимание на то, что в коллекторном двигателе наоборот, обмотки находятся на роторе. Поэтому, далее в тексте ротор — магниты, статор — обмотки.
Для управления двигателем применяется электронный регулятор. В зарубежной литературе Speed Controller или ESC (Electronic speed control).
Что такое бесколлекторный двигатель?
Обычно люди, сталкиваясь с чем-то новым, ищут аналогии. Иногда приходится слышать фразы «ну это как синхронник», или еще хуже «он похож на шаговик». Поскольку большинство бесколлекторных двигателей трехфазные, это еще больше путает, что приводит к неправильному мнению о том, что регулятор «кормит» двигатель переменным 3-x фазным током. Все вышесказанное соответствует действительности только отчасти. Дело в том, что синхронными можно назвать все двигатели кроме асинхронных. Все двигатели постоянного тока являются синхронными с самосинхронизацией, но их принцип действия отличается от синхронных двигателей переменного тока, у которых самосинхронизация отсутствует. Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.
Как шаговый бесколлекторный двигатель тоже, наверное, сможет работать. Но тут такое дело: кирпич он тоже может летать… правда, недалеко, ибо для этого не предназначен. В качестве шагового двигателя больше подойдет вентильный реактивный двигатель.Преимущества и недостатки
Из конструкции двигателя удаляется довольно сложный, требующий обслуживания тяжелый и искрящий узел — коллектор. Конструкция двигателя существенно упрощается. Двигатель получается легче и компактнее. Значительно уменьшаются потери на коммутацию, поскольку контакты коллектора и щетки заменяются электронными ключами. В итоге получаем электродвигатель с наилучшими показателями КПД и показателем мощности на килограмм собственного веса, с наиболее широким диапазоном изменения скорости вращения.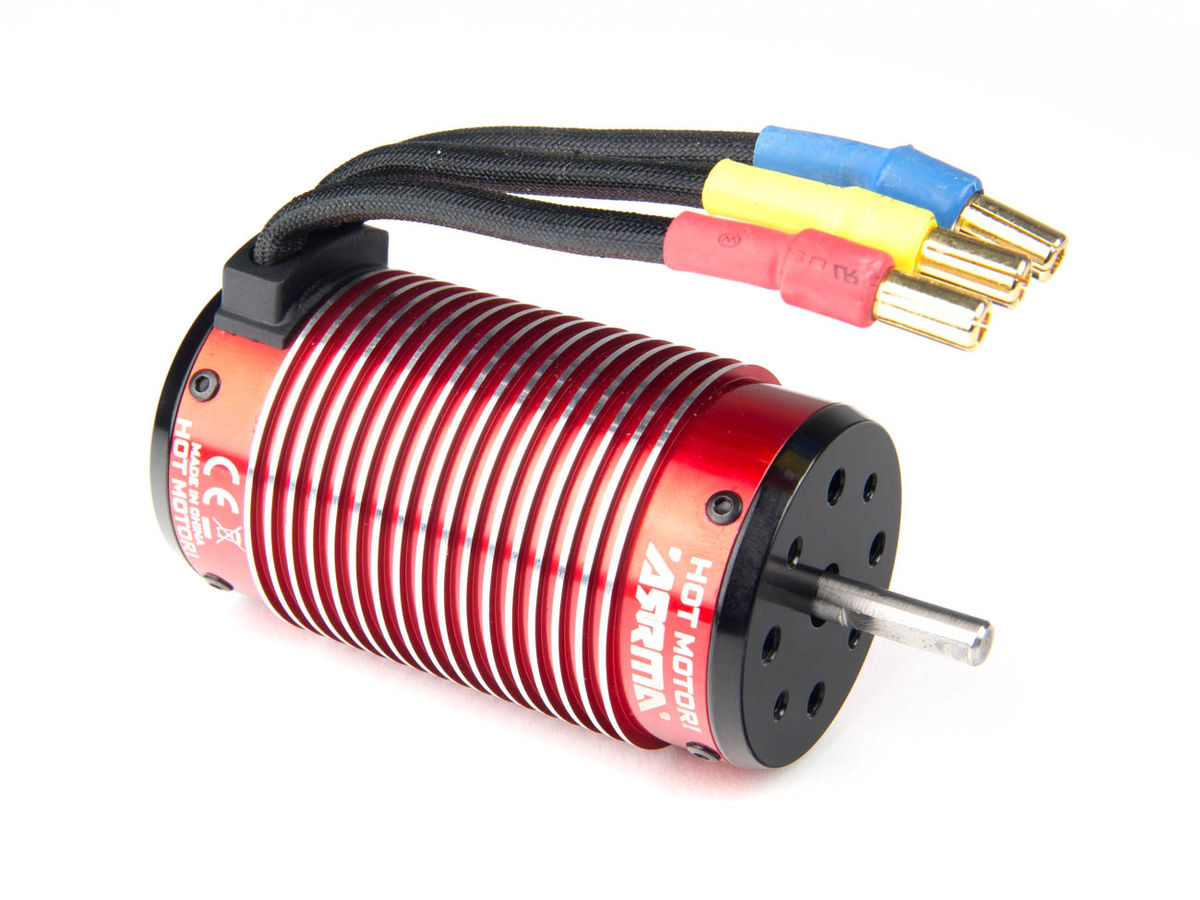 На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех. Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.
На практике бесколлекторные двигатели греются меньше, чем их коллекторные братья. Переносят большую нагрузку по моменту. Применение мощных неодимовых магнитов сделали бесколлекторные двигатели еще более компактными. Конструкция бесколекторного двигателя позволяет эксплуатировать его в воде и агресивных средах (разумеется, только двигатель, регулятор мочить будет очень дорого). Бесколлекторные двигатели практически не создают радиопомех. Единственным недостатком считают сложный дорогостоящий электронный блок управления (регулятор или ESC). Однако, если вы хотите управлять оборотами двигателя, без электроники никак не обойтись. Если вам не надо управлять оборотами бесколлекторного двигателя, без электронного блока управления все равно не обойтись. Бесколлекторный двигатель без электроники — просто железка. Нет возможности подать на него напряжение и добиться нормального вращения как у других двигателей.Что происходит в регуляторе бесколлекторного двигателя?
Для того чтобы понять, что происходит в электронике регулятора, управляющего бесколлекторным двигателем, вернемся немного назад и сначала разберемся как работает коллекторный двигатель.
То же самое делает и электроника, управляющая бесколлекторным двигателем — в нужные моменты подключает постоянное напряжение на нужные обмотки статора.
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя . Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т. д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора опреде
Бесколлекторный двигатель постоянного тока: принцип работы, устройство, виды
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
Определение
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.
Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.
Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Виды БДПТ
Теперь давайте разберемся, какими бывают бесколлекторные двигатели на постоянных магнитах. Их классифицируют по форме противо-ЭДС, конструкции, а также по наличию датчиков положения ротора. Итак, два основных типа отличающихся формой противо-ЭДС, которая наводится в обмотках при вращении ротора:
- BLDC — в них трапецеидальная противо-ЭДС;
- PMSM — противо-ЭДС синусоидальная.
В идеальном случае для них нужны разные источники питания (контроллеры), но на практике они взаимозаменяемы. Но если использовать контроллер с прямоугольными или трапецеидальным выходным напряжением с PMSM-двигателем, то будут слышны характерные звуки, похожие на стук во время вращения.
А по конструкции бесколлекторные двигатели постоянного тока бывают:
- С внутренним ротором. Это более привычное представление электродвигателя, когда статор — это корпус, а вращается вал, расположенный в нём. Часто их называют английским словом «Inrunner». Такой вариант обычно применяют для высокооборотистых электродвигателей
- С внешним ротором. Здесь вращается внешняя часть двигателя с закреплённым на ней валом, в англоязычных источниках его называют «outrunner». Эту схему устройства используют, когда нужен высокий момент.
Выбирают конструкцию в зависимости от того для чего нужен бесколлекторный двигатель в конкретном применении.
Современная промышленность выпускает бесколлекторные двигатели как с датчиками положения ротора, так и без них. Дело в том, что существует множество способов управления БДПТ, для некоторых из них нужны датчики положения, другие определяют положения по ЭДС в обмотках, третьи и вовсе просто подают питание на нужные фазы и электродвигатель самостоятельно синхронизируется с таким питанием и входит в рабочий режим.
Основные характеристики бесколлекторных двигателей постоянного тока:
- Режим работы — длительный или кратковременный.
- Максимальное рабочее напряжение.
- Максимальный рабочий ток.
- Максимальная мощность.
- Максимальные обороты, часто указывают не обороты, а KV — об/в, то есть количество оборотов на 1 вольт приложенного напряжения (без нагрузки на валу). Чтобы получить максимальные обороты — умножьте это число на максимальное напряжение.
- Сопротивление обмотки (чем оно меньше, тем выше КПД), обычно составляет сотые и тысячные доли Ома.
- Угол опережения фазы (timing) — время, через которое ток в обмотке достигнет своего максимума, это связано с её индуктивностью и законами коммутации (ток в индуктивности не может измениться мгновенно.
Схема подключения
Как было сказано выше, для работы бесколлекторного двигателя нужен специальный контроллер. На алиэкспресс можно найти как комплекты из двигателя и контроллера, так и по отдельности. Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Контроллер также называют ESC Motor или Electric Speed Controller. Выбирают их по силе тока, отдаваемого в нагрузку.
Обычно подключение электродвигателя к контроллеру не вызывает затруднений и понятно даже для чайников. Главное, что нужно знать — для смены направления вращения нужно изменить подключение любых двух фаз, собственно также, как и в трёхфазных асинхронных или синхронных электродвигателях.
В сети есть и ряд технических решений и схем как сложных, так и для чайников, которые вы можете увидеть ниже.
В этом видеоролике автор рассказывает, как подружить БК моторчик с «ардуиной».
А в этом ролике вы узнаете о различных способах подключения к разным регуляторам и как его можно сделать своими руками. Автор демонстрирует это на примере моторчика от HDD, и пары мощных экземпляров — inrunner и outrunner.
Кстати схему из видео для повторения также прикладываем:
Где применяются бесколлекторные двигатели
Сфера применения таких электродвигателей досрочно широка. Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Они используются как для привода мелких механизмов: в дисководах CD, DVD-приводах, жёстких дисках, так и в мощных устройствах: аккумуляторе и сетевом электроинструменте (с питанием порядка 12В), радиоуправляемых моделях (например, квадрокоптерах), станках ЧПУ для привода рабочего органа (обычно моторчики с номинальным напряжением 24В или 48В).
Широкое применение БДПТ нашли в электротранспорте, почти все современные мотор-колеса электросамокатов, велосипедов, мотоциклов и автомобилей — это бесколлекторные двигатели. К слову, номинальное напряжение электродвигателей для транспорта лежит в широком пределе, например, мотор-колесо для велосипеда зачастую работает от 36В или от 48В, за редким исключением и больше, а в автомобилях, например, на Toyota Prius порядка 120В, а на Nissan Leaf – доходит до 400, при том что заряжается от сети 220В (это реализуется с помощью встроенного преобразователя).
На самом деле область применения бесколлекторных электродвигателей очень обширна, отсутствие коллекторного узла позволяет его применять опасных местах, а также в местах с повышенной влажностью, без опасений замыканий, искрения или возгорания из-за дефектов в щеточном узле. Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Благодаря высокому КПД и хорошим массогабаритным показателям они нашли применение и в космической промышленности.
Преимущества и недостатки
Бесколлекторным двигателям постоянного тока, как и другим видам электромашин, присущи определенные достоинства и недостатки.
Преимущества у БДПТ заключаются в следующем:
- Благодаря возбуждению мощными постоянными магнитами (неодимовыми, например) превосходят по моменту и мощности и имеют меньшие габариты, чем асинхронные двигатели. Чем пользуется большинство производителей электротранспорта — от самокатов до автомобилей.
- Нет искрящего щеточно-коллекторного узла, который требует регулярного обслуживания.
- При использовании качественного контроллера в отличие от того же КД не выдают помехи в питающую сеть, что особенно важно в радиоуправляемых устройствах и транспорте с развитым электронным оборудованием в бортовой сети.
- КПД более 80, чаще и 90%.
- Высокая скорость вращения, в отдельных случаях до 100000 об/мин.

Но есть и существенный минус: бесколлекторный двигатель без контроллера — просто кусок железа с медной обмоткой. Он никак не сможет работать. Контроллеры стоят недешево и чаще всего их приходится заказывать в интернет-магазинах или с алиэкспресс. Из-за этого использовать БК-моторы в моделях и устройствах домашнего производства не всегда возможно.
Теперь вы знаете, что такое бесколлекторный двигатель постоянного тока, как он работает и где применяется. Надеемся, наша статья помогла вам разобраться во всех вопросах!
Материалы по теме:
В чём разница между коллекторными и бесколлекторными двигателями
Большое количество людей увлекаются созданием электромоделей, где одним из основных элементов выступает электродвигатель. При этом сборка и эксплуатация таких устройств часто вызывает споры относительно того, какие именно моторы лучше использовать.
Ведь на выбор предлагаются коллекторные и бесколлекторные двигатели, у каждого из которых есть свои поклонники и противники. Чтобы попытаться определить лучший вариант, нужно изучить особенности, принцип работы, их сильные и слабые стороны. Это во многом поможет принять окончательное решение.
Чтобы попытаться определить лучший вариант, нужно изучить особенности, принцип работы, их сильные и слабые стороны. Это во многом поможет принять окончательное решение.
Электромоторчики входят в состав разного автомобильного оборудования, включая стеклоомыватели, стеклоподъёмники, вентиляторы охлаждения и отопления, дворники и пр. Но также широко применяются в других сферах и отраслях.
Двигатель коллекторного типа
Под понятие коллекторных двигателей попадают различные электромашины, где переключатель тока и роторный датчик по сути являются одним устройством. С его помощью обеспечивается качественное соединение цепей в неподвижном отсеке двигателя с рабочим ротором.
Внешний вид коллекторного двигателяКонструкция включает в себя мощные щётки и непосредственно сам коллектор. Интересно и то, что коллекторный тип мотора обладает преимуществом в виде простоты ухода и эксплуатации, легко ремонтируется и долго служит. Но есть и недостаток, проявляющийся в малом весе при большом КПД. Изначально это может показаться преимуществом. Быстроходность вместе с малым весом вынуждают использовать дополнительно хороший редуктор, иначе нормально эксплуатировать моторчик не получится.
Изначально это может показаться преимуществом. Быстроходность вместе с малым весом вынуждают использовать дополнительно хороший редуктор, иначе нормально эксплуатировать моторчик не получится.
Если же машины подстроить под меньшие значения скорости, то моментально упадёт коэффициент полезного действия. Это, в свою очередь, негативно отразится на эффективности охлаждения.
Многих интересует, что же значит коллекторный двигатель. Фактически это электромашина переменного тока, способная с лёгкостью преобразовывать постоянный ток в механическую полезную энергию. При этом минимум одна обмотка соединяется с основным коллектором.
В зависимости от комплектации и входящих в состав моторчика компонентов, коллекторные двигатели (КД) могут применяться в игрушках, радиоуправляемых моделях и в автомобильных, выступая в качестве составляющего элемента системы охлаждения, вентиляции, стеклоочистителей, насосов омывателя ветрового стекла и пр.
Ведущим производителям удалось создать универсальные моторы коллекторного типа, которые способны функционировать на всех видах тока, то есть на переменном и постоянном. Они нашли широкое применение при создании электрических инструментов, бытовой техники, на ЖД транспорте. Их преимущество в небольшом весе и компактных размерах при достаточно адекватной цене.
Они нашли широкое применение при создании электрических инструментов, бытовой техники, на ЖД транспорте. Их преимущество в небольшом весе и компактных размерах при достаточно адекватной цене.
Независимо от того, какая полярность у двигателя, этот электромотор будет всегда осуществлять вращения только в одном направлении, то есть в одну неизменную сторону. Это объясняется последовательным соединением роторным и статорных обмоток, что провоцирует одновременную смену полюсов. Потому момент всегда направлен в одну и ту же сторону.
Базовыми составляющими компонентами КД являются:
- Двухполюсный статор, имеющий в своей основе постоянные магниты. В конструкции используются изогнутые магниты соответствующей формы;
- Ротор трёхполюсного типа. Здесь также применяются специфические подшипники, обладающие эффектом скольжения;
- Пластины из меди. Они применяются в роли щёток для двигателя коллекторного типа.
Набор действительно минимальный, потому встречается в основном в наиболее бюджетных и простых версиях коллекторных электромоторов. В их числе моторчики детских игрушек, которые не нуждаются в повышенной мощности.
В их числе моторчики детских игрушек, которые не нуждаются в повышенной мощности.
Если вы хотите получить более качественный КД, тогда в его состав добавляют:
- многополюсные роторы с подшипниками качения;
- графитовые щётки;
- четырёхполюсный статор на основе постоянных магнитов.
Чтобы добиться высокой эффективности, в состав КД включили несколько основных компонентов. А именно:
- Коллектор. Фактически основообразующий элемент двигателя, вступающий в контакт с рабочими щётками. В итоге эти два компонента начинают распределять электроток по катушкам якорной обмотки;
- Статор. Выступает в качестве неподвижной составляющей двигателя;
- Якорь. Обязательный элемент коллекторных электромоторов. Внутри него индуцирует электродвижущая сила и проходит ток. Важно добавить, что якорем может выступать ротор и статор;
- Индуктор. Особая система возбуждения, входящая в состав электромотора коллекторного типа. Служит для создания магнитного потока для того, чтобы вовремя создавать крутящий момент.
 На индукторе обязательно присутствует возбуждающая обмотка или постоянные машины;
На индукторе обязательно присутствует возбуждающая обмотка или постоянные машины; - Щёточки. Щётки входят в состав цепи, по которой следует электрическая энергия от поставщика к якорю. Щётки изготавливаются из высокопрочного графита. В зависимости от конкретного КД, моторчик оснащается 1 парой щёточек и более.
Вне зависимости от компоновки и входящих в состав элементов на основе тех или иных материалов, принцип работы у всех коллекторных типов двигателей остаётся одинаковым.
Принцип работы
Вам будет не сложно представить 2 магнита, у которых есть разные плюса. Попробуйте приставить их друг к другу одноимённым полюсом и посмотрите, что из этого получится. Вам не удастся соединить их, как бы ни старались. Но стоит соединить магниты разными полюсами, как создастся высокопрочное соединение. Именно этот эффект входит в основу работы и устройства коллекторных двигателей.
Схема электродвигателя коллекторного типаВы узнали про устройство КД. Теперь в процессе эксплуатации наверняка захочется узнать, как можно самостоятельно проверить коллекторный двигатель.
- электрический ток поступает на якорные обмотки;
- в зависимости от того, сколько обмоток используется на моторе, ток поочерёдно поступает на каждую из них;
- тем самым создаётся электромагнитное поле;
- с одной стороны южный полюс, а с другой — северный;
- магнитное поле, появляющееся в обмотках, вступает во взаимодействие с полюсами магнитов статора моторчика;
- это позволяет привести в движение, то есть заставить вращаться якорь;
- ток, проходя через коллектор и щёточки, приходит на следующую обмотку;
- так происходит последовательно, в зависимости от числа якорных обмоток;
- переходя с обмотки на обмотку, вал мотора вместе с якорем начинают вращаться;
- вращение происходит до тех пор, пока есть источник напряжения.
В стандартных моторах коллекторного типа предусматривается использование трёхполюсного якоря. То есть он имеет 3 обмотки. Это позволяет двигателю не залипать в одном из положений.
То есть он имеет 3 обмотки. Это позволяет двигателю не залипать в одном из положений.
Преимущества и недостатки
Нельзя отрицать тот факт, что коллекторные движки или же коллекторные электрические двигатели активно применяются в различных сферах и отраслях. В том числе они часто используются в автомобильном производстве.
Но для объективности нужно добавить, что КД используется не всегда и не везде, поскольку в конкретных ситуациях более эффективным и рациональным решением станет бесколлекторный электромотор.
Большой опыт в использовании КД позволяет выделить ряд сильных и слабых качеств эксплуатации такого типа электродвигателя.
Внутреннее строение коллекторного асинхронного двигателяК основным достоинствам можно отнести следующие моменты:
- Сравнительно небольшой показатель параметров пускового тока. Это заметно проявляется в ситуациях, когда коллекторные моторы устанавливаются в различную бытовую технику;
- Такие электромоторы можно подключать напрямую к энергоносителю, то есть к сети.
 При этом исключается необходимость в использовании разного рода дополнительных и вспомогательных приспособлений;
При этом исключается необходимость в использовании разного рода дополнительных и вспомогательных приспособлений; - Высокие показатели быстроходности;
- Независимости от параметров сетевой частоты;
- При наличии схемы управления устройство становится проще.
Но не стоит делать поспешные выводы. Сначала нужно взглянуть на имеющиеся минусы коллекторного двигателя. А именно:
- Общие показатели коэффициента полезного действия снижены. Это обусловлено наличием индуктивности, а также потерь, необходимых для перемагничивания статора;
- Максимальные показатели крутящего момента далеки от совершенства;
- Сравнительно низкий уровень надёжности;
- Относительно небольшой срок службы.
Специалисты выделяют один ключевой недостаток, характеризующий коллекторные типы электромоторов. Никто не спорит, что в коллекторниках очень удобно регулировать обороты. Но если они высокие, сразу же проявляют себя щётки. Причём не с самой лучшей стороны. Щётки всё время находятся в состоянии плотного прилегания к самому коллектору электромотора. При высокой скорости работы начинает их быстрый износ. С течением времени происходит засорение, результатом чего становится появление искр.
Щётки всё время находятся в состоянии плотного прилегания к самому коллектору электромотора. При высокой скорости работы начинает их быстрый износ. С течением времени происходит засорение, результатом чего становится появление искр.
Постепенный износ щёток двигателя и всего узла коллектора с щётками способствует снижению общих показателей эффективности работы КД. То есть коллекторно-щёточный узел смело можно считать главным недостатком конструкции. Потому производители всё чаще отказываются от коллекторников, выбирая вместо них бесщёточные аналоги.
Главным конкурентом коллекторного типа электродвигателя выступает бесколлекторный аналог. Он имеет отличный от КД принцип работы, а также характеризуется своими сильными и слабыми сторонами.
Бесколлекторный мотор
Теперь можно поговорить о том, чем же коллекторный двигатель в действительности отличается от рассматриваемого бесколлекторного аналога.
Внешний вид двигателя бесколлекторного типаОчевидная разница просматривается при изучении принципа работы бесколлекторного двигателя (БКД). Хотя часто бесколлекторный и коллекторный двигатель сопоставляют друг с другом, воспринимая их как конкурентов, по сути это два разных мотора. Потому и отличия между ними обязательно присутствуют.
Хотя часто бесколлекторный и коллекторный двигатель сопоставляют друг с другом, воспринимая их как конкурентов, по сути это два разных мотора. Потому и отличия между ними обязательно присутствуют.
Фактически БКД работает наоборот.
- В конструкции не предусмотрено наличие щёток и самого коллектора, что становится очевидным уже исходя из самого названия;
- Если говорить о магнитах, то в случае с бесколлекторником они размещаются обязательно вокруг вала. При этом магниты выполняют роль или функции ротора;
- Обмотки с несколькими магнитными полюсами располагаются вокруг установленного ротора;
- На роторе присутствует датчик. Он же сенсор. Его задача заключается в контроле положения ротора и передаче полученной информации на процессор;
- Этот процессор работает параллельно с регулятором скорости, который отвечает за скорости вращения. Суммарно за 1 секунду обмен информацией происходит около 100 раз минимум.
Подобное устройство и принцип работы позволяет получить более плавный режим работы двигателя при его максимальной отдаче.
В случае с бесколлекторными электродвигателями они могут оснащаться датчиками или сенсорами, а также эксплуатироваться без них. Если датчика нет, это в определённой, но незначительной степени снизит эффективность работы всего электродвигателя.
Распознать БКД с сенсором и без него достаточно просто. Если у обычного двигателя присутствует 3 провода питания, то в моделях с датчиком дополнительно имеется шлейф, состоящий из тонких проводов. Он идёт от самого моторчика к регулятору скорости.
Преимущества и недостатки
Главный и неоспоримый плюс бесщёточных электромоторов заключается в практически полном отсутствии деталей, способных изнашиваться. Говорить о полном их отсутствии нельзя, поскольку роторный вал устанавливается на подшипники. Именно они всё же могут с течением времени износиться. Хотя даже у подшипников ресурс огромный. Плюс всегда можно быстро и без особого труда заменить подшипник в случае его износа.
Именно они всё же могут с течением времени износиться. Хотя даже у подшипников ресурс огромный. Плюс всегда можно быстро и без особого труда заменить подшипник в случае его износа.
Такие особенности конструкции породили преимущества в виде надёжности, высокой эффективности и длительного срока службы. За счёт наличия датчика положения ротора улучшается его производительность и точность в процессе работы.
Вспомните недостаток коллекторных аналогов, где щётки искрятся и быстро изнашиваются, параллельно провоцируя помехи в процессе работы узла, механизма или машины, в которой установлен КД. В случае с бесколлекторными или бесщёточными моторами от такой проблемы удалось избавиться. Никаких искрений здесь не наблюдается.
Бесколлекторники не трутся, не перегреваются, что также справедливо относится к весомым достоинствам механизма. Дополнительное обслуживание в процессе даже очень активной эксплуатации тут не требуется.
Если же говорить про недостатки, то из существенного и всё равно условного можно выделить только один минус. Это более высокая стоимость. Минус условный по причине того, что при своей цене исключается необходимость в замене пружин, якоря, коллектора или щёток. Потому стоимость целиком и полностью себя оправдывает.
Это более высокая стоимость. Минус условный по причине того, что при своей цене исключается необходимость в замене пружин, якоря, коллектора или щёток. Потому стоимость целиком и полностью себя оправдывает.
Далее уже можно сделать собственные субъективные выводы, отталкиваясь от приведённой выше информации.
Как работает бесколлекторный двигатель постоянного тока
Добавлено 16 июля 2019 в 22:15
Сохранить или поделиться
Узнайте обо всех достоинствах бесколлекторных двигателей, а также о преимуществах и недостатках выбора этого типа двигателей для вашего проекта.
Если вы работаете над проектом, в котором есть движущаяся часть, вы, вероятно, будете искать двигатель, чтобы сделать это движение возможным. В этой серии статей мы рассмотрим наиболее популярные типы двигателей, которые используют разработчики. Сначала мы рассмотрели коллекторные двигатели постоянного тока. Теперь давайте посмотрим на их ближайший аналог: бесколлекторный двигатель постоянного тока.
Чтобы узнать, для каких проектов лучше всего подходят бесколлекторные двигатели постоянного тока, ознакомьтесь с обзором:
Обзор бесколлекторных двигателей постоянного тока
Бесколлекторные двигатели – это новая технология двигателей, быстро внедряемая в высокотехнологичных приборах и электромобилях (например, Tesla Model S) в качестве замены коллекторных двигателей постоянного тока. Они также чрезвычайно распространены в любительских летательных аппаратах, включая многомоторные. Поскольку бесколлекторные двигатели постоянного тока не имеют коллектора и щеток (что очевидно), они работают без многих ограничений коллекторных двигателей постоянного тока.
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективностиКак они работают?
Бесколлекторные двигатели постоянного тока обычно используются в многомоторных летательных аппаратах из-за их высокой скорости и эффективности.
Оценка характеристик бесколлекторных двигателейКак и коллекторные двигатели постоянного тока, бесколлекторные двигатели работают путем изменения полярности обмоток внутри двигателя. Магнитные поля, создаваемые при возбуждении обмоток, оказывают толкающее воздействие на постоянные магниты, расположенные вокруг внешнего корпуса.
Магнитные поля, создаваемые при возбуждении обмоток, оказывают толкающее воздействие на постоянные магниты, расположенные вокруг внешнего корпуса.
На бесколлекторном двигателе постоянного тока вращается не вал двигателя, а внешний корпус. Поскольку центральный вал, к которому прикреплены обмотки, является неподвижным, питание может подаваться непосредственно на обмотки, что устраняет необходимость в щетках и коллекторе.
Без щеток бесколлекторные двигатели изнашиваются намного менее быстро, чем коллекторные двигатели постоянного тока. Они работают с гораздо меньшим звуковым и электрическим шумом и способны работать на гораздо более высоких скоростях.
Из чего состоит бесколлекторный двигатель постоянного токаБесколлекторные двигатели постоянного тока только недавно начали использоваться в потребительских товарах и любительских проектах, потому что их сложно контролировать.
В то время как коллекторные двигатели постоянного тока для изменения полярности обмоток используют просто вращение самого двигателя, бесколлекторные двигатели постоянного тока управляются активно и требуют сложной схемы управления обмоткой, которая также должна масштабироваться при увеличении скорости.
Только благодаря тому, что микроконтроллеры стали дешевле и доступнее, стало возможным, чтобы недорогие системы могли удерживать правильную частоту вращения, необходимую для работы двигателя.
Достоинства бесколлекторных двигателей постоянного тока
Низкий износ
Единственным физическим интерфейсом между вращающейся внешней стороной корпуса двигателя и стационарными обмотками внутри являются шарикоподшипники, что означает, что бесколлекторные двигатели постоянного тока изнашиваются очень медленно.
Высокая скорость
Бесколлекторные двигатели имеют намного меньшее трение, чем коллекторные двигатели постоянного тока, поэтому они могут работать на более высоких скоростях.
Высокая эффективность
По сравнению с другими типами двигателей бесколлекторные двигатели обладают очень высокой эффективностью работы, что означает более низкое энергопотребление при той же выходной мощности по сравнению с коллекторными двигателями постоянного тока.
Недостатки бесколлекторных двигателей постоянного тока
Очень высокая сложность управления
Бесколлекторные двигатели постоянного тока для правильной работы требуют специализированных контроллеров и сложных алгоритмов управления.
Высокая цена
Стоимость самих двигателей не слишком высока, но когда добавляется стоимость контроллера, общая стоимость использования бесколлекторного двигателя постоянного тока в проекте становится относительно высокой.
Необходимость специализированных передач
В таких приложениях, как вакуумные пылесосы Dyson, бесколлекторные двигатели постоянного тока должны быть снабжены передачей для преобразования высоких скоростей до нужной скорости.
Оригинал статьи:
Теги
Бесколлекторный двигательДвигательЭлектродвигательСохранить или поделиться
Бесколлекторный электродвигатель — это… Что такое Бесколлекторный электродвигатель?
Принцип работы трёхфазного вентильного двигателяВентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
Описание ВД
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор
Статор бесколлекторного электродвигателяСтатор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции.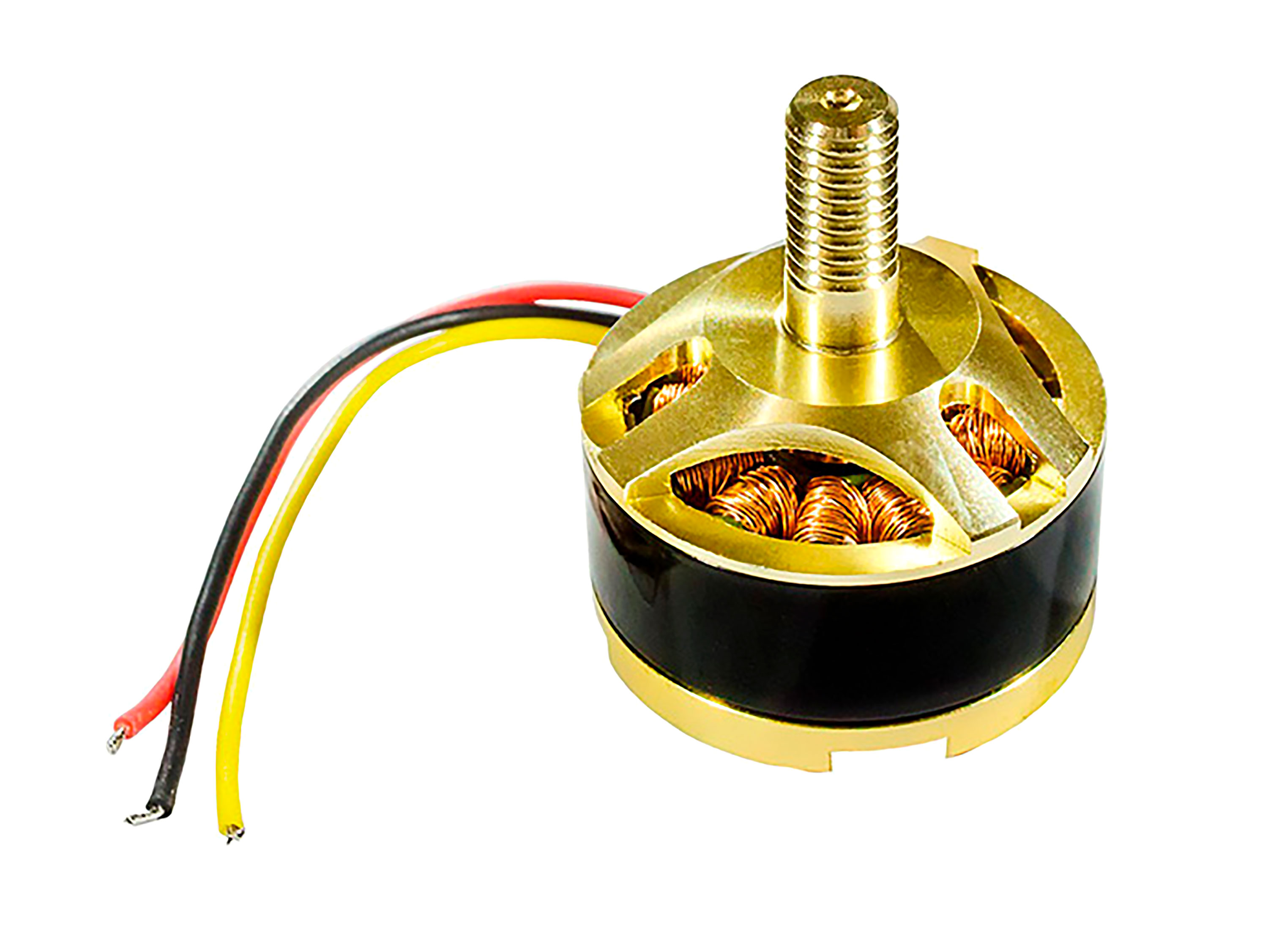 Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Сейчас получают популярность магниты из сплавов редкоземельных элементов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.
Система управления ВД
Система управления содержит силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера, в связи с большим количество вычислительных операций по управлению двигателем.
Принцип работы ВД
Принцип работы ВД основан на том, что контроллер ВД коммутирует обмотки статора так, чтобы вектор магнитного поля статора всегда был ортогонален вектору магнитного поля ротора. С помощью широтно-импульсной модуляции (ШИМ) контроллер управляет током, протекающим через обмотки ВД, т.е. вектором магнитного поля статора, и таким образом регулируется момент, действующий на ротор ВД. Знак у угла между векторами определяет направление момента действующего на ротор.
Коммутация производится так, что поток возбуждения ротора — Ф0 поддерживается постоянным относительно потока якоря. В результате взаимодействия потока якоря и возбуждения создаётся вращающий момент M, который стремится развернуть ротор так, чтобы потоки якоря и возбуждения совпали, но при повороте ротора под действием ДПР происходит переключение обмоток и поток якоря поворачивается на следующий шаг.
В этом случае и результирующий вектор тока будет сдвинут и неподвижен относительно потока ротора, что и создаёт момент на валу двигателя.
В двигательном режиме работы МДС статора опережает МДС ротора на угол 90°, который поддерживается с помощью ДПР. В тормозном режиме МДС статора отстаёт от МДС ротора, угол 90° так же поддерживается с помощью ДПР.
Управление двигателем
Контроллер ВД регулирует момент, действующий на ротор, меняя величину ШИМ.
В отличие от щёточного электродвигателя постоянного тока, коммутация в ВД осуществляется и контролируется с помощью электроники.
Распространены системы управления, реализующие алгоритмы широтно-импульсного регулирования и широтно-импульсной модуляции при управлении ВД.
Система, обеспечивающая самый широкий диапазон регулирования скорости — у двигателей с векторным управлением. С помощью преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования электропривода с векторным управлением — контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.
Достоинства и недостатки ВД
В последнее время, этот тип двигателей быстро приобретает популярность, проникая во многие отрасли промышленности. Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
Находит применение в различных сферах использования: от бытовых приборов до рельсового транспорта.
ВД с электронными системами управления часто объединяют в себе лучшие качества бесконтактных двигателей и двигателей постоянного тока.
Достоинства:
- Широкий диапазон изменения частоты вращения
- Бесконтактность и отсутствие узлов, требующих техобслуживания — бесколлекторная машина
- Возможность использования во взрывоопасной и агрессивной среде
- Большая перегрузочная способность по моменту
- Высокие энергетические показатели (КПД более 90 %)
| Проверить информацию. Необходимо проверить точность фактов и достоверность сведений, изложенных в этой статье. |
- Большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов
Недостатки:
- Относительно сложная система управления двигателем
- Высокая стоимость двигателя, обусловленная использованием дорогостоящих постоянных магнитов в конструкции ротора
- Во многих случаях более рациональным оказывается применение асинхронного двигателя с преобразователем частоты.
Для применений, комбинирующих максимально достижимый КПД с предельно простыми и надёжными блоками управления (ключевой коммутатор, не использующий ШИМ), можно также выделить следующую особенность: Несмотря на то, что обороты могут широко варьироваться управляющим блоком, приемлемый КПД можно получить лишь в относительно узком интервале угловых скоростей. Это определяется индуктивностью обмоток. Если скорость будет ниже оптимальной, продолжающаяся подача тока в данную фазу, после достижения предела магнитного потока, будет приводить лишь к ненужному нагреву. На скоростях выше оптимальной, магнитный поток в полюсе не достигнет максимума из-за ограниченного индуктивностью времени нарастания тока. Примерами таких двигателей являются модельные бесколлекторные комплекты. Они должны быть эффективными, лёгкими и надёжными, а для того чтобы обеспечить оптимальную угловую скорость при заданной нагрузочной характеристике, производители выпускают модельные ряды с различными индуктивностями (числом витков) обмоток. При этом, меньшее число витков соответствует более быстроходному двигателю.
При этом, меньшее число витков соответствует более быстроходному двигателю.
См. также
Ссылки
Бесщеточные двигатели
Lumenier ZIP 2207 2750кв POPO Pro Motor
Представляем двигатель ZIP от Lumeneir. Этот двигатель был разработан и построен для обеспечения невероятной производительности и мощности. Этот двигатель мощностью 2750 кВ идеально подходит для мощных 4-х дюймовых (5-дюймовых) мультикоптеров с возможностью легкого поворота до 7-дюймовых винтов.
Новая серия ZIP от Lumenier является кульминацией многолетнего опыта производства двигателей для гоночных дронов. Двигатели ZIP оснащены лучшими компонентами и мощными изогнутыми магнитами N52SH (высокотемпературные) для максимальной мощности.Это дает вам лучший двигатель для гоночного или фристайл-дрона. Lumenier всегда была известна своими гладкими и шелковистыми двигателями, и двигатели ZIP не исключение. Каждый двигатель динамически сбалансирован и испытан на заводе, чтобы гарантировать плавную и безупречную работу двигателя прямо из коробки, в результате чего получаются четкие кадры полета без желе.
В новом валу POPO® Pro используются новейшие технологии, позволяющие управлять гребными винтами, совместимыми с POPO®, без необходимости использования контргаек! Просто нажмите на штифт, установите опору на место и летите.Это так просто!
В этой версии POPO® «Pro» отсутствует область вала с резьбой, что позволяет еще больше утопить вал и штифт. Это повышает долговечность и снижает вес. Для нажатия булавки можно использовать любой простой инструмент (3 мм или более узкий), даже скрепку!
Двигатель имеет минимально легкое основание и полый стальной вал диаметром 4 мм с резьбовым соединением для упрощения обслуживания. Моторы ZIP 2207 имеют вес 32 г, продолжая традицию Lumenier по созданию одних из самых легких моторов для гонок и фристайла на рынке.
Тщательно собранные и динамически сбалансированные в соответствии с высочайшими стандартами в помещениях с контролируемым климатом Lumenier, двигатели Lumenier ZIP используют новейшую клеевую технологию, роботов для равномерного распределения клея и передовые процедуры отверждения, чтобы магниты не соскользнули даже при колоссальные требования, предъявляемые к ним во время гонок на дронах и соревнований по фристайлу.
РУКОВОДСТВО ПО ПРИМЕНЕНИЮ БЕСЩЕТКОГО ДВИГАТЕЛЯ ДЛЯ RC
Мощность электродвигателя указана в ваттах.750 Вт = 1 лошадиная сила.
Самый простой способ оценить потребляемую мощность для радиоуправляемых приложений — это использовать 100 ватт на фунт для спортивного полета, 150 для агрессивного высшего пилотажа, 200 ватт на фунт для трехмерного полета.
В таблице ниже также перечислены примерно сопоставимые системы тлеющего и бензинового питания для справки.
Обратите внимание, что в инвентаре Хакера НАМНОГО больше двигателей, чем указано ниже. Другие двигатели могут иметь другой гребной винт, аккумулятор или рабочие характеристики.
| УРОВЕНЬ МОЩНОСТИ | СВЕТ | ВЕС МОДЕЛИ | ДВИГАТЕЛЬ ХАКЕРА | ЯЧЕЙКИ | РАЗМЕР ПРОФИЛЯ | AMPS | ЦЕНА |
. 10 10 | 2-3 фунта | A30-28S | 3S 2100 | 10 × 5 | 25 |  99″ data-order=»$63.99″> $ 63.99 99″ data-order=»$63.99″> $ 63.99 | |
| 400 Вт | .10 / .15 | 3-4 фунта | A30 16M | 3S 2100 |  5″ data-order=»11×5.5″> 11 × 5,5 5″ data-order=»11×5.5″> 11 × 5,5 | 28 | $ 69,49 |
| 500 Вт | 0,15 | 3-4,5 фунта |  com/shop/hacker-brushless-motors/outrunners/a30-10-l-v3/">A30 10L</a>»> A30 10L com/shop/hacker-brushless-motors/outrunners/a30-10-l-v3/">A30 10L</a>»> A30 10L | 3S 2500 | 11 × 5,5 | 36 | $ 81,49 |
| 650 Вт |  25″>,25 25″>,25 | 4-5 фунтов | A30 10XL | 3S 2500 | 14 × 7 | 42 |  99″ data-order=»$86.99″> 86 долларов.99 99″ data-order=»$86.99″> 86 долларов.99 |
| 650 Вт | .32 | 3,5-6 фунтов | A30 12XL | 4S 2500 | 14 × 7 | 45 | 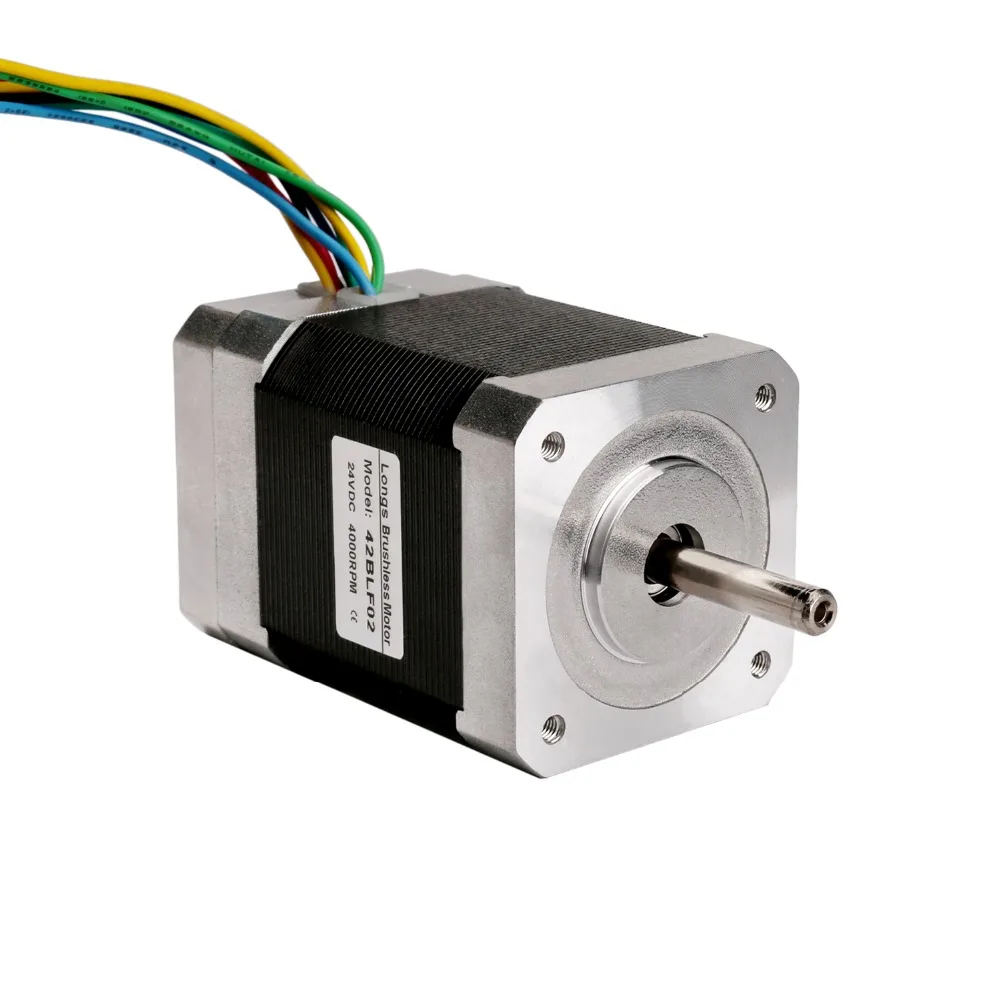 99″ data-order=»$86.99″> $ 86,99 99″ data-order=»$86.99″> $ 86,99 |
| 900 Вт | .46 | 4- 7 фунтов | A40 10S | 4S 3000 | 14 × 7 | 50 |  49″ data-order=»$110.49″> $ 110,49 49″ data-order=»$110.49″> $ 110,49 |
| 1000 Вт | ,60 | 5-8 фунтов | A40 12L | 6S 4000 | 16 × 8 | 50 |  49″ data-order=»$118.49″> 118 $.49 49″ data-order=»$118.49″> 118 $.49 |
| 1200 Вт | .60 | 10 фунтов | A50 16S | 6S 4000 | 16 × 10 | 55 |  49″ data-order=»$139.49″> $ 139,49 49″ data-order=»$139.49″> $ 139,49 |
| 1900 Вт | .90 | фунтов8 | A60 7XS | 8S 4500 | 19 × 10 | 85 | |
| 2000 Вт | 1,10 | 10-15 фунтов | A60 5S | 6S 4500 | 1048212 |  99″ data-order=»$233.99″> 233 доллара.99 99″ data-order=»$233.99″> 233 доллара.99 | |
| 3000 Вт | 1,60 | 12-20 фунтов | A60 14L | 10S 4500 | 21 × 13 | 90 |  99″ data-order=»$269.99″> $ 269,99 99″ data-order=»$269.99″> $ 269,99 |
| 3000 Вт | ИЗОБРАЖЕНИЕ | фунтов | Q80 13XS | 10S 5000 | 20 × 13 | 76 |  99″ data-order=»$459.99″> $ 459,99 99″ data-order=»$459.99″> $ 459,99 |
| УРОВЕНЬ МОЩНОСТИ | ГАЗ | ВЕС МОДЕЛИ | ДВИГАТЕЛЬ HACKER | ЯЧЕЙКИ | ПРОПОРТ | AMPS | ЦЕНА |
| 20-30 фунтов |  com/shop/hacker-brushless-motors/outrunners/hacker-q80-brushless-motor/q80-7m-v2-5500-watt-brushless-motor-10s/" target="_self">Q80 7M</a>» data-order=»<a href="https://hackermotorusa.com/shop/hacker-brushless-motors/outrunners/hacker-q80-brushless-motor/q80-7m-v2-5500-watt-brushless-motor-10s/" target="_self">Q80 7M</a>»> Q80 7M com/shop/hacker-brushless-motors/outrunners/hacker-q80-brushless-motor/q80-7m-v2-5500-watt-brushless-motor-10s/" target="_self">Q80 7M</a>» data-order=»<a href="https://hackermotorusa.com/shop/hacker-brushless-motors/outrunners/hacker-q80-brushless-motor/q80-7m-v2-5500-watt-brushless-motor-10s/" target="_self">Q80 7M</a>»> Q80 7M | 10S 5000 1P | 23×8 | 110 |  99″ data-order=»$619.99″> $ 619.99 99″ data-order=»$619.99″> $ 619.99 | ||
| 5000 Вт | 85cc | 25-40 фунтов | Q80 8M | 12S 5000 1P | 26×10 | 110 |  99″ data-order=»$619.99″> $ 619,99 99″ data-order=»$619.99″> $ 619,99 |
| 5000 Вт | 100cc | Q80 7L | 12S 5000 2P | 27×12 | 110 |  99″ data-order=»$699.99″> 699,99 $ 99″ data-order=»$699.99″> 699,99 $ | |
| 7,500 Вт | 120cc | 40 фунтов + | Q100 7M | 12S 5000 2P | 30 179 | ||
| 8,900 Вт | 150 куб. 4M 4M | 12S 8000 2P | 34×16 | 210 | $ 1899,99 |
Услуги по проектированию и производству бесщеточных электродвигателей на заказ
Высококачественные бесщеточные двигатели, разработанные специально для вашего проекта.
Бесщеточные двигатели постоянного тока (двигатели BLDC) обеспечивают более высокий диапазон скоростей, лучшие тепловые характеристики и более высокую удельную мощность по сравнению с щеточными двигателями постоянного тока. Поскольку нет угольных щеток или медного коллектора, единственными элементами износа в двигателе являются подшипники, что делает двигатель BLDC намного лучше, когда требуется длительный срок службы. Если ваше приложение требует высокого рабочего цикла и бесшумной работы, бесщеточный двигатель (BLDC) может быть идеальным решением.
Поскольку нет угольных щеток или медного коллектора, единственными элементами износа в двигателе являются подшипники, что делает двигатель BLDC намного лучше, когда требуется длительный срок службы. Если ваше приложение требует высокого рабочего цикла и бесшумной работы, бесщеточный двигатель (BLDC) может быть идеальным решением.
с питанием от постоянного тока не только обеспечивают превосходный срок службы и удельную мощность, но также более эффективны и предлагают более точное управление движением, чем их щеточные аналоги постоянного тока.Мы предлагаем широкий спектр двигателей с BLDC для небольшого промышленного и коммерческого оборудования.
Бесщеточные двигатели с питанием от постоянного тока более эффективны и долговечны, чем их щеточные аналоги. Они тише, легче и обеспечивают более точное управление движением. Мы предлагаем широкий ассортимент бесщеточных электродвигателей постоянного тока для небольших промышленных и бытовых применений.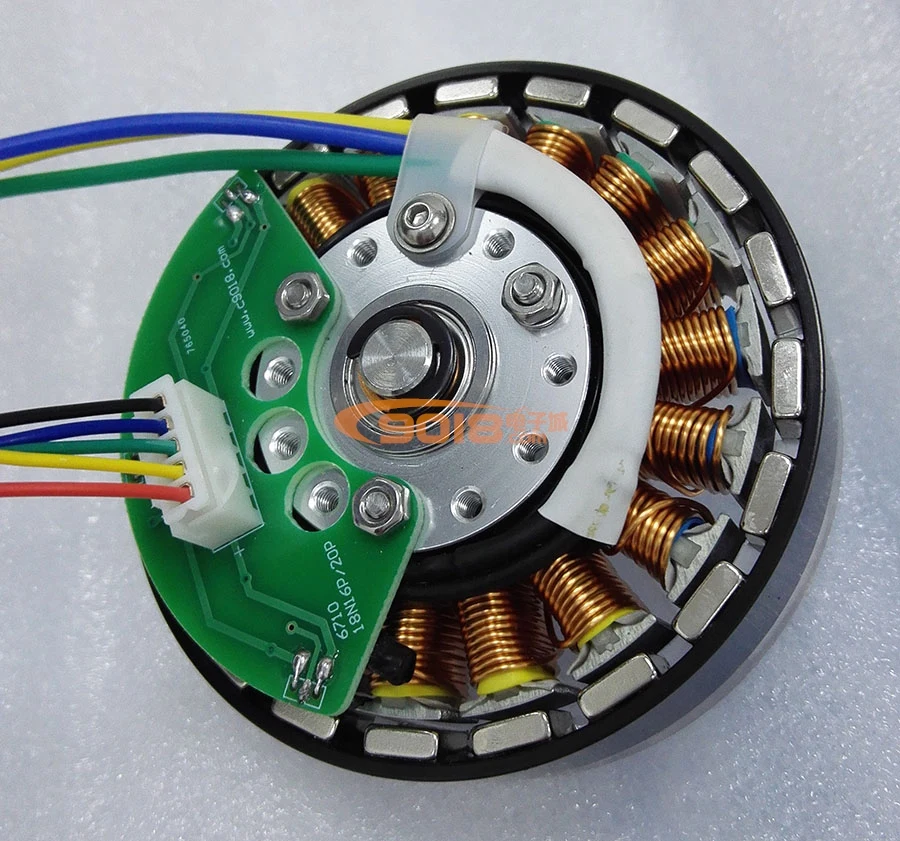
Как работают бесщеточные двигатели постоянного тока?
Бесщеточные двигателипостоянного тока аналогичны асинхронным двигателям переменного тока.Электрический ток создает магнитное поле, которое поочередно притягивает и отталкивает другой набор магнитов, что приводит к вращению.
В щеточном двигателе постоянного тока используются угольные щетки на коммутаторе для изменения полярности, вызывающей вращение. Бесщеточные двигатели заменяют этот аппарат электронным контроллером, который заставляет ротор вращаться. Удаление угольных щеток повышает эффективность при меньшем износе. Это также обеспечивает более компактную конструкцию и более тихую работу.
Два типа бесщеточных двигателей постоянного тока
Есть два типа бесщеточных двигателей постоянного тока: с внутренним и внешним ротором. По сути, все они работают одинаково, но имеют разные преимущества и ограничения.
Двигатели с внутренним ротором
Двигатели с внутренним ротором имеют ротор (вращающийся элемент), вращающийся внутри статора (неподвижный элемент). Это более типичные двигатели с валом, вращающимся в центре. Преимущества внутренних двигателей:
Это более типичные двигатели с валом, вращающимся в центре. Преимущества внутренних двигателей:
- Меньший размер
- Хорошо работает в условиях динамической нагрузки
- Непрерывная работа в течение длительного времени
- Более высокая удельная мощность
- Эффективный
Двигатели с внешним ротором
Двигатели с внешним ротором имеют противоположную конструкцию.Ротор находится снаружи и вращается вокруг неподвижного статора, расположенного в центре. Преимущества двигателя внешнего исполнения:
- короче
- Экономнее
- Лучше для приложений с постоянной скоростью
- Повышенная стабильность
Двигатели постоянного тока с внешним ротором, как правило, более популярны. Мы предлагаем бесщеточные двигатели с внутренним и внешним ротором от 6 мм до 200 мм со встроенными или настраиваемыми элементами управления. Мы будем рады обсудить ваши варианты более подробно, чтобы понять, какой двигатель лучше всего подходит для ваших нужд.