В пазах сердечника статора размешается трехфазная обмотка (в случае однофазных двигателей — двухфазная), которая соединяется с сетью трехфазного (однофазного) переменного тока. Трехфазная симметричная обмотка статора асинхронного двигателя состоит из трех однофазных обмоток, которые соединяются между собой по схеме звезда (У) или треугольник (Д). Между собой оси обмоток смещены в пространстве на электрический угол 360/m=360/3=120° (v— число фаз).
Два проводника, расположенных в пазах, отстоящих друг от друга на расстоянии у, называемом шагом обмотки, образуют простейший контур — виток. Каждый виток может состоять из нескольких параллельных (элементарных) проводников. Витки, уложенные в одну и ту же пару пазов и соединенные между собой последовательно, образуют катушку или секцию обмоткн. Совокупность катушек (секции), лежащих в соседних пазах b соединенных последовательно между собой, называется катушечной группой. Обмотка статора асинхронного двигателя
Расстояние между осями соседних зубцов (пазов) называется зубцовым делением t (измеряется в единицах длины или в градусах). Шаг обмотки у может измеряться в зубцовых делениих и в градусах. Часть окружности статора, приходящаяся на один полюс магнитного поля, называется полюсным делением τ. Полюсное деление может измеряться в единицах длины, градусах, зубцовых делениях. Для первых двух случаев полюсное деление рассчитывается по формуле
(5)
где D — диаметр расточки статора, м; 2р —число полюсов магнитного поля двигателя.
Из формулы (5) следует, что геометрический угол, соответствующий полюсному делению, равен 180° для двухполюсной машины, 90° для четырехполюсной, 60° для шестиполюсной и т. д. Но по определению полюсное деление — часть окружности, приходящийся на один полюс. А полюс занимает всегда электрический угол 180°, или половину периода.
1° (геометрический угол)=р° (электрический угол). (6)
В частном случае, когда 2р=2, эти углы совпадают.
Шаг обмотки у, равный полюсному делению τ, называется диаметральным (обмотка с диаметральным шагом). Если у<τ, шаг обмотки называется укороченным, если у>τ — удлиненным. Разность τ—у называется укорочением. Относительное значение укорочения β равно:
β=у/τ . (7)
Расположенные в соседних пазах стороны катушек, занимают q зубцовых делений, называемых числом пазов на полюс и фазу. Зная число пазов на статоре z
q1=z1 (2pm), (8).
а для трехфазных обмоток
q1=z1/6p.
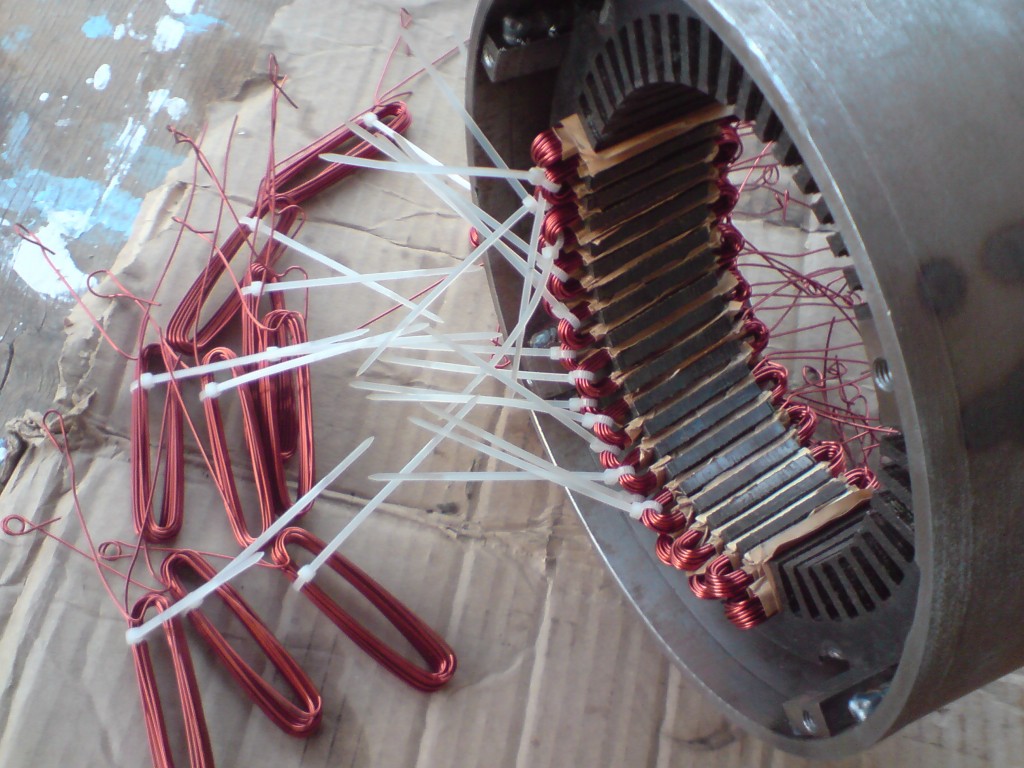
По -виду катушек обмотка статора асинхронного двигателя подразделяется на всыпные обмотки с мягкими катушками и обмотки с жесткими катушками. Мягкие катушки изготовляются из круглого медного или алюминиевого провода. Такие катушки наматываются на шаблоны, где им придается предварительная форма, и затем укладываются в изолированные трапецеидальние пазы (рис. 9). После укладки катушек и закрепления их в пазах с помощью клиньев или крышек производится формовка лобовых частей и бандажирование. Междуфазовые изоляционные прокладки устанавливаются в процессе укладки обмоток. Обмотанный таким образом статор подвергается пропитке. Весь процесс изготовления всыпных обмоток может быть полностью механизирован.
Мягкие катушки изготовляются из круглого медного или алюминиевого провода. Такие катушки наматываются на шаблоны, где им придается предварительная форма, и затем укладываются в изолированные трапецеидальние пазы (рис. 9). После укладки катушек и закрепления их в пазах с помощью клиньев или крышек производится формовка лобовых частей и бандажирование. Междуфазовые изоляционные прокладки устанавливаются в процессе укладки обмоток. Обмотанный таким образом статор подвергается пропитке. Весь процесс изготовления всыпных обмоток может быть полностью механизирован.
Рис. 9. Пазы и обмотки статора: а — полузакрытый паз, обмотка однослойная; б — полузакрытый паз, обмоткаг двухслойная; в — открытый паз. обмотка двухслойная.; г — полуоткрытый паз, обмотка однослойная; 1 — обмоточный провод; 2 — пазовая коробка; 3 — прокладка под клином; 4 — прокладка между слоями; 5 — пазовый клин
Жесткие катушки (или полукатушки) изготовляются из прямоугольного изолированного провода. Окончательная форма придается катушкам до укладки. В двигателях напряжением до 0,66 кВ пазовую изоляцию устанавливают в сердечник до укладки катушек, а сами катушки не изолируют. После укладки катушек в полуоткрытые пазы (рис. 9) обмотанный статор подвергают пропитке и сушке.
Окончательная форма придается катушкам до укладки. В двигателях напряжением до 0,66 кВ пазовую изоляцию устанавливают в сердечник до укладки катушек, а сами катушки не изолируют. После укладки катушек в полуоткрытые пазы (рис. 9) обмотанный статор подвергают пропитке и сушке.
В двигателях напряжением 3 кВ и выше применяются катушки с корпусной изоляцией, которая наносится на катушки до укладки их в открытые пазы (
Всыпные обмотки статора асинхронного двигателя имеют следующие преимущества перед обмотками с жесткими катушками из прямоугольного провода:
- возможность полной механизации всего процесса изготовления;
- меньшая длина и вылет лобовых частей, а следовательно, и меньшие потери, более высокий КПД, меньшая длина активной части машины;
- более благоприятная с точки зрения использования зубцовой зоны трапецеидальная форма паза;
- меньшее открытие паза, обеспечивающее меньшие пульсации потока в воздушном зазоре, т.
 е. меньшие добавочные потери и намагничивающий ток;
е. меньшие добавочные потери и намагничивающий ток;
- большая производственная технологичность: намотка катушечных групп, в ряде случаев и обмоток фаз, производится без разрыва, т. е. меньшее число паек; возможность укладки обмотки в пазы сердечника без корпуса облегчают и удешевляют обмотку и пропитку.
В силу этих достоинств мягкие всыпные обмотки статора асинхронного двигателя дешевле и менее трудоемки.
Достоинствами жестких обмоток являются больший коэффициент заполнения за счет применения прямоугольных проводов и большая надежность, связанная с меньшей технологической дефектностью, так как в пазы укладываются готовые изолированные и проверенные катушки, которые подвергаются меньшим деформациям.
В силу указанных преимуществ всыпные обмотки статора асинхронного двигателя являются предпочтительными для асинхронных двигателей на напряжение до 1 кВ и мощностью до 100 кВт. В двигателях мощностью выше 100 кВт и в двигателях напряжением 3 кВ и выше обмотки выполняются из прямоугольного провода (из жестких катушек).
По размещению катушек в пазах различаются однослойные и двухслойные обмотки. Сторона катушки однослойной обмотки занимает паз полностью, при двухслойной обмотке в пазу располагаются вместе две стороны различных катушек, одна из которых устанавливается на дне паза, а другая — в части паза, прилегающей к расточке статора.
Механизация укладки обмотки на электромашиностроительных заводах привела к широкому применению однослойных концентрических обмоток в двигателях мощностью до 10—15 кВт. Для двигателей большей мощности (15—100 кВт) применяются более трудоемкие одно-двухслойные и двухслойные всыпные обмотки из круглого провода. Для двигателей мощностью выше 100 квт, обмотка которых укладывается вручную, применяются двухслойные обмотки.
Одно-двухслойные концентрические обмотки сочетают в себе преимущества однослойных в части осуществления механизированной укладки и двухслойных (возможно укорочение шага и уменьшение длины лобовых частей).
При ремонте асинхронных двигателей при отсутствии механизированной укладки обмоток применяют двухслойные обмотки.
Обмотки машин переменного тока
Страница 1 из 2
Обмотки с током должны выполнять две основные функции: обеспечивать требуемую для работы машины э. д. с. и создавать магнитное поле, необходимое для преобразования энергии.
В машинах переменного тока применяются обмотки переменного тока: 1) присоединяемые к внешней цепи, 2) постоянно замкнутые накоротко, 3) соединенные с коллектором, а также 4) обмотки постоянного тока. Ниже рассматриваются обмотки переменного тока асинхронных и синхронных машин, присоединяемые к внешней цепи.
Элементом обмотки является виток, состоящий из двух последовательно соединенных проводников, расположенных в пазах на расстоянии, приблизительно равном полюсному делению т.
Группа витков, соединенных менаду собой и имеющих общую изоляцию от сердечника, называется катушкой. Одновитковая катушка обычно выполняется из проводников большого сечения, которые называются стержнями. Независимо от количества витков в катушке она имеет только две активные стороны, уложенные в пазы на расстоянии шага у обмотки.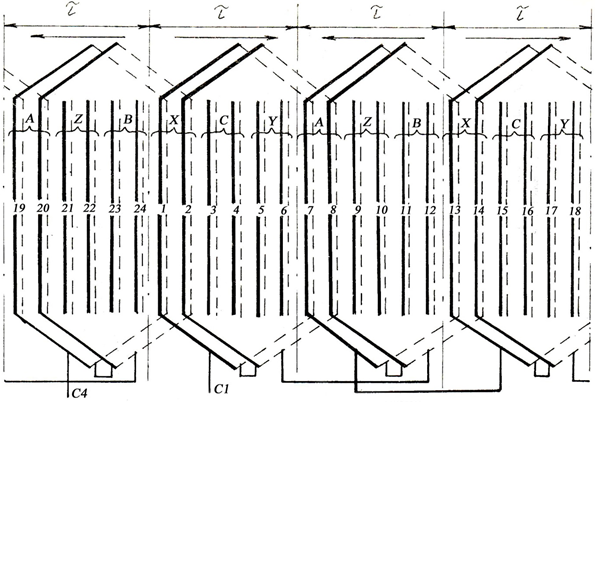
Шаг обмотки обычно измеряется количеством пазовых делений между сторонами катушки и поэтому должен выражаться целым числом.
Совокупность катушек, присоединенных к внешней цепи, называется фазной обмоткой.
Под парой соседних полюсов располагаются одна или несколько (группа) соединенных последовательно катушек. В первом случае обмотка называется сосредоточенной, во втором случае — распределенной. Распределенная обмотка характеризуется количеством
пазов на полюс и фазу д = которое может быть как целым, так и дробным в зависимости от соотношения количества пазов Z, количества полюсов 2р и количества фаз т.
Обмотка статора (и ротора) может быть однофазной или многофазной, состоящей из нескольких фазных обмоток. Наибольшее распространение получили симметричные трехфазные обмотки в соответствии с применяемой в промышленности трехфазной системой переменного тока.
Стороны катушек в пазах укладываются в один или в два слоя.
 В первом случае сторона катушки занимает полностью паз и такая обмотка называется однослойной. Во втором случае в пазу размещаются стороны двух катушек и обмотка называется двухслойной. В особых случаях возможна укладка сторон катушек в три слоя.
В первом случае сторона катушки занимает полностью паз и такая обмотка называется однослойной. Во втором случае в пазу размещаются стороны двух катушек и обмотка называется двухслойной. В особых случаях возможна укладка сторон катушек в три слоя.Распределение пазов (сторон катушек) по фазам производится таким образом, чтобы катушки одной группы располагались рядом. Это позволяет получить наибольшую э. д. с. при минимальной затрате обмоточного провода. При целом q количество катушек в каждой группе получается одинаковым и равным q.
А. Трехфазная обмотка. Пример распределения пазов по фазам для симметричной обмотки с Z = 24 и 2р = 4 показан на рис. 1.
Puc. 1. Распределение пазов и сторон катушек по фазам
Соединение проводников для образования витков и катушек и соединение катушек между собой производится таким образом, чтобы расход обмоточных материалов был минимальным, изготовление обмотки не вызывало затруднений, обеспечивалась возможность расположения и достаточная жесткость лобовых частей. Кроме того, желательно, чтобы сопротивления фазных обмоток были одинаковы.
Кроме того, желательно, чтобы сопротивления фазных обмоток были одинаковы.
Различные варианты выполнения однослойной трехфазной обмотки рассмотрены для Z = 24 и 2р = 4.
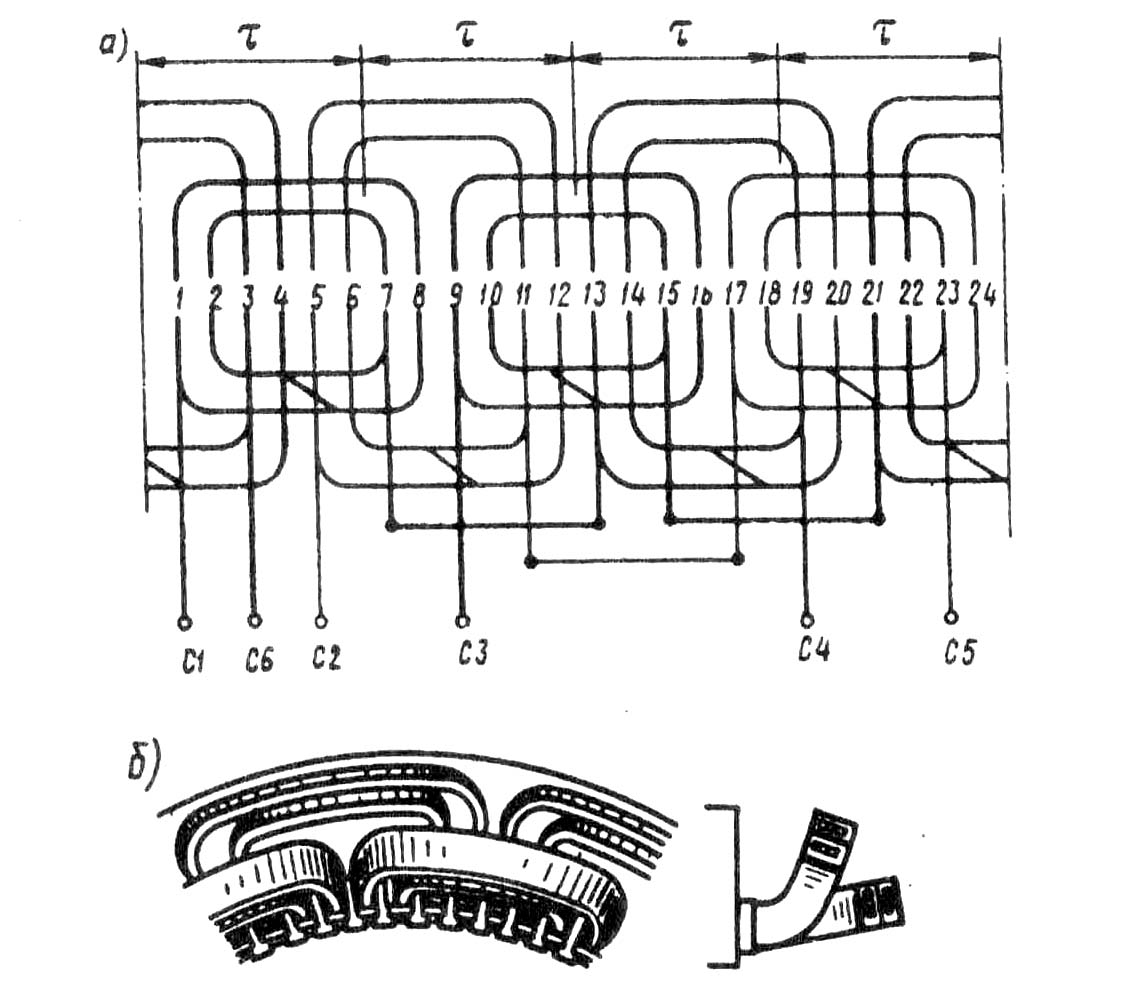
На рис. 2 показана обмотка, у которой катушки одной группы имеют различные размеры по ширине, например одна катушка образована проводниками, расположенными в пазах 2 и 7, и имеет шаг у = 5, проводники второй катушки расположены в пазах 1 и 8 и для нее у = 7. Внешняя катушка охватывает внутреннюю и получается обмотка с концентрическими катушками. Количество катушек в каждой группе равно q и они соединены последовательно.
Лобовые части катушек располагаются в двух поверхностях (рис. 2 ,б). Катушечные группы одной фазы соединены между собой последовательно и образуют фазную обмотку. Начала фазных обмоток статора трехфазных машин имеют следующие обозначения: Cl, С2, СЗ и концы их С4, С5, Сб. Соответственно для обмоток ротора: Р1, Р2, РЗ и Р4.
Количество катушечных групп в фазной обмотке равно количеству пар полюсов ее. При четном р в каждой фазной обмотке получается одинаковое количество катушек с различным расположением лобовых частей, это способствует уравниванию активных (и индуктивных) сопротивлений обмоток при последовательном соединении катушечных групп. При нечетном р одну группу катушек приходится выполнять более сложной формы с переходом лобовых частей из одной поверхности в другую.
При четном р в каждой фазной обмотке получается одинаковое количество катушек с различным расположением лобовых частей, это способствует уравниванию активных (и индуктивных) сопротивлений обмоток при последовательном соединении катушечных групп. При нечетном р одну группу катушек приходится выполнять более сложной формы с переходом лобовых частей из одной поверхности в другую.
Рис. 2. Схема трехфазной однослойной обмотки с концентрическими катушками: а — схема; б — расположение лобовых частей
При большом и четном q (в двухполюсных машинах g = 6-г 8) для уменьшения места, занимаемого обмоткой по оси машины, целесообразно лобовые части катушек каждой половины группы отгибать в противоположные стороны (рис. 3) и размещать их в трех поверхностях (рис. 3,6). Шаг отдельных катушек половины группы получается различным, меньше полюсного деления. Лобовые части катушечных групп каждой фазной обмотки расположены в разных поверхностях и это вызывает небольшое различие сопротивлений фазных обмоток.
Обмотка с расположением лобовых частей в трех поверхностях применяется также при разъемном сердечнике статора, но в этом случае лобовые части всех катушек полюсного деления отгибаются в одну сторону (рис. 4,а) и располагаются в трех поверхностях (рис. 4,6). Такая обмотка позволяет производить сборку и разборку статора с уложенными в пазах катушками и требуется только соединение (или разъединение) перемычек между катушечными группами.
Рис. 3. Схема трехфазной однослойной обмотки с разделенными катушечными группами: а — схема; б — расположение лобовых частей
Ввиду сложности изготовления и укладки лобовых частей, концентрические обмотки в настоящее время имеют ограниченное применение.
Рис. 4. Схема трехфазной однослойной обмотки для разъемного статора: а — схема; б — расположение лобовых частей
Однослойная обмотка может быть выполнена с катушками одинаковой формы в виде трапеции (рис. 5,а). Лобовые части катушки
выполняются разной длины (рис. 5,6). При четном q > 2 для облегчения укладки лобовые части катушек половины группы отгиба выполняются в противоположные стороны.
5,6). При четном q > 2 для облегчения укладки лобовые части катушек половины группы отгиба выполняются в противоположные стороны.
Рис. 5. Схема трехфазной однослойной обмотки с шаблонными катушками: а — схема; б — расположение лобовых частей
Разновидностью такой обмотки является цепная, у которой отгибаются в противоположные стороны лобовые части каждой пары соседних катушек (рис. 6,а) и длина лобовых частей получается одинаковой (рис. 6).
Рис. 6. Схема трехфазной однослойной цепной обмотки: а — схема; б — расположение лобовых частей
Цепная обмотка может быть выполнена как при четном, так и при нечетном q и при различных, но обязательно нечетных значениях шага у катушки.
Катушечные группы допускают последовательное, параллельное п смешанное (последовательно-параллельное) соединение.
Рис. 7. Схема трехфазной однослойной волновой обмотки:
а — схема; б — расположение лобовых частей
Во всех однослойных обмотках с целым q наибольшее количество параллельных ветвей равно количеству катушечных групп, а в цепной обмотке с четным q — удвоенному количеству катушечных групп.
В рассмотренных обмотках сначала соединяются между собой катушки в катушечные группы, а затем последние — в фазную обмотку.
Рис. 8. Схема двухфазной однослойной обмотки с концентрическими катушками: а — схема; б — расположение лобовых частей
Такие обмотки по аналогии с обмотками якорей машин постоянного тока называются петлевыми. В одновитковых катушках для уменьшения длины соединений между катушками применяется
волновая обмотка (рис. 7). При одном обходе зубцового слоя образуется последовательная цепь катушек, имеющих одинаковые шаги. Переход к каждой последующей цепи требует одного укороченного (или удлиненного) шага. Количество обходов для фазной обмотки равно q.
Однослойная обмотка выполнима также и при дробном q.
Б. Двухфазная и однофазная обмотки. Эти обмотки применяются в машинах малой мощности и могут быть выполнены с концентрическими или с одинаковыми катушками.
Рис. 9. Схема однофазной однослойной обмотки с разделенными катушечными группами: а — схема; б — расположение лобовых частей
Двухфазная обмотка может быть выполнена как с равными фазными зонами, так и с неравными. Схема двухфазной обмотки с концентрическими катушками при Z = 24, 2р = 4 и
Схема двухфазной обмотки с концентрическими катушками при Z = 24, 2р = 4 и
показана на рис. 8. Лобовые части располагаются в двух поверхностях (рис. 8,6). Обозначение начала и конца одной обмотки статора С1 и С2, обозначения начала и конца второй обмотки П1 и П2.
В однофазных обмотках для уменьшения расхода обмоточных материалов и потерь в обмотке используется не вся зубцовая зона, фазная зона обычно составляет 2/3 полюсного деления (рис. 9).
Шаг — обмотка — статор
Шаг — обмотка — статор
Cтраница 1
Шаг обмотки статора из 1-го в 13 — й паз. [1]
Укорочение шага обмотки статора может дать ощутимые эффекты для полузакрытых пазов при работе на холостом ходу и при пониженной нагрузке. Однако нельзя дать общего правила для уменьшения магнитных шумов путем укорочения шага, так как в каждом отдельном случае необходимо сделать подробный анализ силовых волн и полей, возбуждающих шумы. При работе с номинальной нагрузкой преобладающими являются гармоники, вызванные распределением обмоток в пазах, так что влияние укорочения шага становится незначительным.
[2]
При работе с номинальной нагрузкой преобладающими являются гармоники, вызванные распределением обмоток в пазах, так что влияние укорочения шага становится незначительным.
[2]
Далее выбирают тип и шаг обмотки статора, обмоточный коэффициент. В асинхронных двигателях единых серий при наружном диаметре статора более 200 — 250 мм применяют двухслойные обмотки, при меньших диаметрах обычно используют однослойные обмотки. [4]
Обмоточный коэффициент fe06i определяют по шагу обмотки статора и числу пазов на полюс и фазу. [6]
Обмоточный коэффициент fcO6i определяют по шагу обмотки статора и числу пазов на полюс и фазу. [7]
Величина реактивного сопротивления сильно зависит от сокращения шага обмотки статора. [9]
Обмоточный коэффициент & об t определяют по шагу обмотки статора и числу пазов на полюс и фазу. [10]
[10]
В этом случае для полного использования магнитного потока шаг обмотки статора целесообразно принять равным полюсному делению tr поля возбуждения. Обмотка якоря состоит из отдельных катушек, охватывающих при qs целом числе пазов статора на полюс и фазу msqs пазов статора. [11]
Я и В — величины, характеризующие геометрические размеры лобовой части обмотки; Y — шаг обмотки статора; D, — внутренний диаметр статора; А, — расчетная высота паза статора. [12]
Картера kcl 1 15, kc2 1 02; индукция в воздушном зазоре В (, 7600 гс насыщение магнитной цепи 1 5; номинальное скольжение s 0 05; сокращение шага обмотки статора ( 5 7 / 9; обмоточный коэффициент kwi 0 92; средний радиус спинки статора с 11 2 см; радиус расточки статора Rt — 6 2 см; толщина спинки статора Л 2 2 см; активная длина статора / ( 20 см; масса статора, приведенная к 1 см. средней цилиндрической поверхности спинки, тс 3 5 — 10 — 5 кгс-сек.
[13]
средней цилиндрической поверхности спинки, тс 3 5 — 10 — 5 кгс-сек.
[13]
Число проводников в обмотках индуктосина определяется числом пар полюсов в зависимости от назначения индуктосина. Синусоидальная зависимость коэффициента взаимоиндукции между обмотками получается за счет выбора определенного отношения ширины проводника к полюсному делению, скоса проводников и сокращения шага обмотки статора по отношению к обмотке ротора. [14]
Для исследования бесщеточных систем возбуждения создана модель такой системы. Она позволяет исследовать электромагнитные процессы в несимметричных режимах работы якорных обмоток, вопросы бесконтактного управления вращающимся преобразователем, измерения параметров режима и др. Специальный модельный генератор бесщеточного возбудителя имеет петлевую якорную обмотку стержневого типа с шестью параллельными ветвями, при этом с помощью перемычек можно изменить схему и шаг обмотки статора. Кроме того, модель включает диодный и тиристорный статические выпрямители, подвозбудитель и приводной двигатель.
[15]
Кроме того, модель включает диодный и тиристорный статические выпрямители, подвозбудитель и приводной двигатель.
[15]
Страницы: 1 2
Шаговый двигатель
Дмитрий Левкин
Шаговый электродвигатель — это вращающийся электродвигатель с дискретными угловыми перемещениями ротора, осуществляемыми за счет импульсов сигнала управления [1].Предшественником шагового двигателя является серводвигатель.
Шаговые (импульсные) двигатели непосредственно преобразуют управляющий сигнал в виде последовательности импульсов в пропорциональный числу импульсов и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи. Это обстоятельство упрощает систему привода и заменяет замкнутую систему следящего привода (сервопривода) разомкнутой, обладающей такими преимуществами, как снижение стоимости устройства (меньше элементов) и увеличение точности в связи с фиксацией ротора шагового двигателя при отсутствии импульсов сигнала.
Очевиден и недостаток привода с шаговым двигателем: при сбое импульса дальнейшее слежение происходит с ошибкой в угле, пропорциональной числу пропущенных импульсов [2].
Поэтому в задачах, где требуются высокие характеристики (точность, быстродействие) используются серводвигатели. В остальных же случаях из-за более низкой стоимости, простого управления и неплохой точности обычно используются шаговые двигатели.
Шаговый двигатель, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.
Гибридный шаговый электродвигатель
Шаговые двигатели надежны и недороги, так как ротор не имеет контактных колец и коллектора. Ротор имеет либо явно выраженные полюса, либо тонкие зубья. Реактивный шаговый двигатель — имеет ротор из магнитомягкого материала с явно выраженными полюсами. Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Гибридный шаговый двигатель имеет составной ротор включающий полюсные наконечники (зубья) из магнитомягкого материала и постоянные магниты. Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Определить имеет ротор постоянные магниты или нет можно посредством вращения обесточенного двигателя, если при вращении имеется фиксирующий момент и/или пульсации значит ротор выполнен на постоянных магнитах.
Статор шагового двигателя имеет сердечник с явно выраженными полюсами, который обычно делается из ламинированных штампованных листов электротехнической стали для уменьшения вихревых токов и уменьшения нагрева. Статор шагового двигателя обычно имеет от двух до пяти фаз.
Так как шаговый двигатель не предназначен для непрерывного вращения в его параметрах не указывают мощность. Шаговый двигатель — маломощный двигатель по сравнению с другими электродвигателями.
Одним из определяющих параметров шагового двигателя является шаг ротора, то есть угол поворота ротора, соответствующий одному импульсу. Шаговый двигатель делает один шаг в единицу времени в момент изменения импульсов управления. Величина шага зависит от конструкции двигателя: количества обмоток, полюсов и зубьев. В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
В зависимости от конструкции двигателя величина шага может меняться в диапазоне от 90 до 0,75 градусов. С помощью системы управления можно еще добиться уменьшения шага пополам используя соответствующий метод управления.
Реактивный шаговый двигатель — синхронный реактивный двигатель. Статор реактивного шагового двигателя обычно имеет шесть явновыраженных полюсов и три фазы (по два полюса на фазу), ротор — четыре явно выраженных полюса, при такой конструкции двигателя шаг равен 30 градусам. В отличии от других шаговых двигателей выключенный реактивный шаговый двигатель не имеет фиксирующего (тормозящего) момента при вращении вала.
Трехфазный реактивный шаговый двигатель
(шаг 30°)
Четырехфазный реактивный шаговый двигатель
(шаг 15°)
Ниже представлены осциллограммы управления для трехфазного шагового двигателя.
Униполярное волновое управление
Биполярное полношаговое управление
Биполярное 6-шаговое управление
Осциллограммы управления для четырехфазного шагового двигателя показаны на рисунке ниже.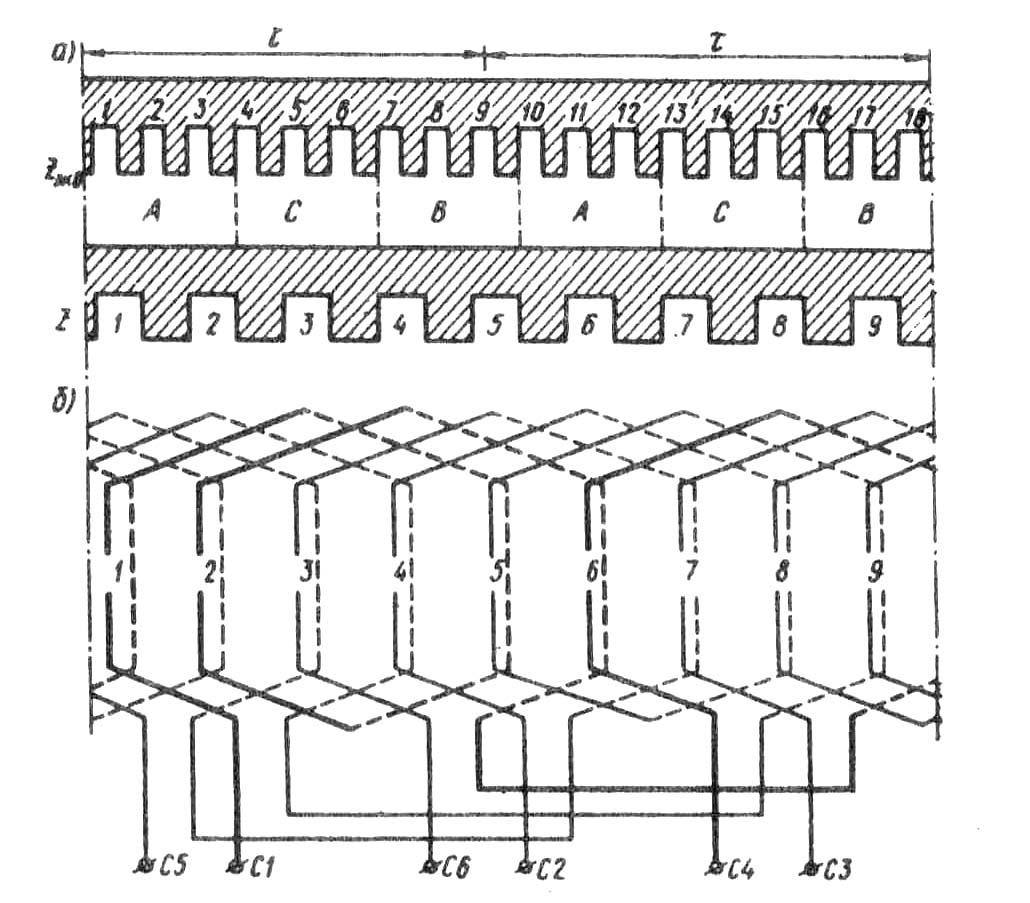 Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
Последовательное включение фаз статора создает вращающееся магнитное поле за которым следует ротор. Однако из-за того, что ротор имеет меньшее количества полюсов, чем статор, ротор поворачивается за один шаг на угол меньше чем угол статора. Для реактивного двигателя угол шага равен:
,
- где NR — количество полюсов ротора;
- NS – количество полюсов статора.
Осциллограммы управления 4-х фазным реактивным шаговым двигателем
Чтобы изменить направление вращения ротора (реверс) реактивного шагового двигателя, необходимо поменять схему коммутации обмоток статора, так как изменение полярности импульса не изменяет направления сил, действующих на невозбужденный ротор [2].
Реактивные шаговые двигатели применяются только тогда, когда требуется не очень большой момент и достаточно большого шага угла поворота. Такие двигатели сейчас редко применяются.
- Отличительные черты:
- ротор из магнитомягкого материала с явно выраженными полюсами;
- наименее сложный и самый дешевый шаговый двигатель;
- отсутствует фиксирующий момент в обесточенном состоянии;
- большой угол шага.

Шаговый двигатель с постоянными магнитами имеет ротор на постоянных магнитах. Статор обычно имеет две фазы.
По сравнению с реактивными, шаговые двигатели с активным ротором создают большие вращающие моменты, обеспечивают фиксацию ротора при снятии управляющего сигнала. Недостаток двигателей с активным ротором — большой угловой шаг (7,5—90°). Это объясняется технологическими трудностями изготовления ротора с постоянными магнитами при большом числе полюсов. Если угол фиксации находится в диапазоне от 7,5 до 90 градусов скорее всего это шаговый двигатель с постоянными магнитами нежели гибридный шаговый двигатель.
Обмотки могут иметь ответвление в центре для работы с однополярной схемой управления. Двухполярное управление требуется для питания обмоток без центрального ответвления.
Униполярный (однополярный) шаговый двигатель
Униполярный шаговый двигатель с постоянными магнитами имеет одну обмотку на фазу с ответвлением в центре. Каждая секция обмотки включается отдельно.
Таким образом расположение магнитных полюсов может быть изменено без изменения направления тока, а схема коммутации может быть выполнена очень просто (например на одном транзисторе) для каждой обмотки. Обычно центральное ответвление каждой фазы делается общим, в результате получается три вывода на фазу и всего шесть для обычного двухфазного двигателя.
Легкое управление однополярными двигателями сделало их популярными для любителей, они возможно являются наиболее дешевым способом чтобы получить точное угловое перемещение.
Схема униполярного двухфазного шагового двигателя
Схема биполярного двухфазного шагового двигателя
Биполярный шаговый двигатель
Двухполярные двигатели имеют одну обмотку на фазу. Для того чтобы изменить магнитную полярность полюсов необходимо изменить направление тока в обмотке, для этого схема управления должна быть более сложной, обычно с H-мостом.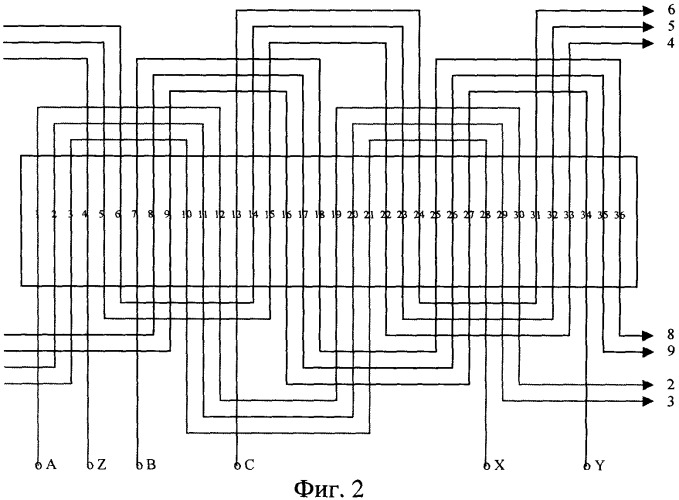 Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Биполярный шаговый двигатель имеет два вывода на фазу и не имеет общего вывода. Так как пространство у биполярного двигателя используется лучше, такие двигатели имеют лучший показатель мощность/объем чем униполярные. Униполярный двигатель имеет двойное количество проводников в том же объеме, но только половина из них используется при работе, тем не менее биполярный двигатель сложнее в управление.
Управление шаговым двигателем с постоянными магнитами
Для управления шаговым двигателем на постоянных магнитах к его обмоткам прикладывается сфазированный переменный ток. На практике это почти всегда прямоугольный сигнал сгенерированный от источника постоянного тока. Биполярная система управления генерирует прямоугольный сигнал изменяющийся от плюса к минусу, например от +2,5 В до -2,5 В. Униполярная система управления меняет направление магнитного потока катушки посредством двух сигналов, которые поочереди подаются на противоположные выводы катушки относительно ее центрального ответвления.
Волновое управление
Простейшим способом управления шаговым двигателем является волновое управление. При таком управлении в один момент времени возбуждается только одна обмотка. Но такой способ управления не обеспечивает максимально возможного момента.
Положение ротора шагового двигателя при волновом управлении
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора.
Волновое управление биполярным шаговым двигателем
На рисунке выше представлены схема биполярного шагового двигателя и двухполюсные осциллограммы управления. При таком управлении обе полярности («+» и «-«) подаются на двигатель. Магнитное поле катушки поворачивается за счет того, что полярность токов управления меняется.
Волновое управление униполярным шаговым двигателем
На рисунке выше представлены схема униполярного шагового двигателя и однополюсные осциллограммы управления. Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Так как для управления униполярным шаговым двигателем требуется только одна полярность это существенно упрощает схему системы управления. При этом требуется генерация четырех сигналов так как необходимо два однополярных сигнала для создания переменного магнитного поля катушки.
Необходимое для работы шагового двигателя переменное магнитное поле может быть создано как униполярным так и биполярным способом. Однако для униполярного управления катушки двигателя должны иметь центральное ответвление.
Шаговый двигатель с постоянными магнитами может иметь разную схему соединения обмоток статора. Схемы соединения шагового двигателя показаны на рисунке ниже.
Схема 4 выводного биполярного шагового двигателя
Схема 5 выводного униполярного шагового двигателя
Схема 6 выводного униполярного шагового двигателя
Схема 8 выводного шагового двигателя
Шаговый двигатель с 4 выводами может управляться только биполярным способом. 6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
6-выводной двигатель предназначен для управления униполярным способом, несмотря на то, что он также может управляться биполярным способом если игнорировать центральные выводы. 5-выводной двигатель может управляться только униполярным способом, так как общий центральный вывод соединяет обе фазы. 8-выводная конфигурация двигателя встречается редко, но обеспечивает максимальную гибкость. Такой двигатель может быть подключен для управления также как 6- или 5- выводной двигатель. Пара обмоток может быть подключена последовательно для высоковольтного биполярного управления с малыми токами или параллельно для низковольтного управления с большими токами.
- 8-выводные двигатели могут быть соединены в нескольких конфигурациях:
- униполярной;
- биполярной с последовательным соединением. Больше индуктивность, но ниже ток обмотки;
- биполярной с параллельным соединением. Больше ток, но ниже индуктивность;
- биполярной с одной обмоткой на фазу. Метод использует только половину обмоток двигателя при работе, что уменьшает доступный момент на низких оборотах, но требует меньше тока.

Полношаговое управление
Полношаговое управление обеспечивает больший момент, чем волновое управление так как обе обмотки двигателя включены одновременно. Положение ротора при полношаговом управлении показано на рисунке ниже.
Положение ротора шагового двигателя при полношаговом управлении
Полношаговое биполярное управление шаговым двигателем
Полношаговое биполярное управление показанное на рисунке выше имеет такой же шаг как и при волновом управлении. Униполярное управление (не показано) потребует два однополярных управляющих сигнала для каждого биполярного сигнала. Однополярное управление требует менее сложной и дорогой схемы управления. Дополнительная стоимость биполярного управления оправдана когда требуется более высокий момент.
Полушаговое управление
Шаг для данной геометрии шагового двигателя делится пополам. Полушаговое управление обеспечивает большее разрешение при позиционировании вала двигателя.
Положение ротора шагового двигателя при полушаговом управлении
Полушаговое управление — комбинация волнового управления и полношагового управления с питанием по очереди: сначала одной обмотки, затем с питанием обоих обмоток. При таком управлении количество шагов увеличивается в двое по сравнению с другими методами управления.
Полушаговое биполярное управление шаговым двигателем
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: реактивного и с постоянными магнитами, что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
Как построить трехфазную двухслойную петлевую обмотку статора
Основными параметрами обмотки статора являются:
m – число фаз обмотки;
2р – число полюсов;
q– число пазов на полюс и фазу;
Z– число пазов статора;
y– шаг секции обмотки;
t — полюсное деление;
— сокращение (укорочение) шага обмотки;
а– число параллельных ветвей в фазе обмотки.
Некоторые из этих параметров должны быть заданы, остальные можно рассчитать.
Порядок расчета и построения обмотки статора рассмотрим на примере двухслойной обмотки петлевого типа с диаметральным шагом.
Дано: 2р = 2; m = 3; q = 2; a = 1; .
1. Рассчитать некоторые параметры из числа основных:
Z = 2pmq = 2 3 2 =12 – число пазов статора;
— полюсное деление;
y = bt = 1 6 = 6 – шаг секции;
эл – угол между соседними пазами;
nгр = 2pm = 2 3 = 6 – число катушечных групп;
— сдвиг между фазами в пазах.
2. Изобразить границы развертки поверхности расточки статора пунктирными линиями, разделить развертку на Zравных частей (пазов) и пронумеровать их, разметить полюсные деления.
3. Нанести на развертке активные стороны катушек – верхние левые сплошными линиями, нижние правые – пунктирами. Образовать фазные зоны по q пазов в каждой, желательно разными цветами. В обмотке с укороченным шагом размещать нижние правые стороны секций со сдвигом на (t-y) пазов.
4. Образовать первую секцию первой фазы, соединив лобовыми частями левую верхнюю и правую нижнюю активные стороны. Учесть, что номер паза правой стороны секции равен (y + 1). Аналогично образовать все остальные секции. Показать направление ЭДС проводников (целесообразно только для левых верхних активных проводников секций).
5. Образовать катушечную группу первой фазы под первой парой полюсов. Для этого надо соединить последовательно секции одной фазной зоны так, чтобы их ЭДС совпадали по направлению. Аналогично образуются остальные катушечные группы.
6. Соединить катушечные группы первой фазы в «а» параллельных ветвей так, чтобы ЭДС каждой параллельной ветви совпадали по направлению. То же самое надо сделать для других фаз, выполняя условие сдвига между фазами (в пазах), равном l.Начала и концы фаз: С1 ¸ С4; С2 ¸ С5; С3 ¸ С6.
Пример построения развернутой схемы обмотки показан на рисунке 3.
7. Для наглядности соединения катушечных групп в параллельные ветви построить упрощенную схему обмотки. Для этого пронумеровать катушечные группы на развернутой схеме начиная с первой. Их число равно 2рm. Активные стороны катушечных групп изобразить в виде прямоугольников, расположив их рядом друг с другом для всех трех фаз как показано на рисунке. Каждой паре полюсов соответствуют два ряда прямоугольников, т.е. всего будет 2р горизонтальных рядов. Задние лобовые части обозначить пунктирными линиями между прямоугольниками верхних и нижних (левых и правых) сторон. Передние лобовые части обозначить сплошными линиями – для верхних левых – слева, для нижних правых – справа каждого ряда прямоугольников. Обозначить условное направление ЭДС в катушечных группах – для нечетных номеров – слева направо, для четных номеров – справа налево. Соединить обозначения катушечных групп (ряды прямоугольников) в «а» параллельных ветвей так, чтобы ЭДС в активных сторонах совпадали по направлению.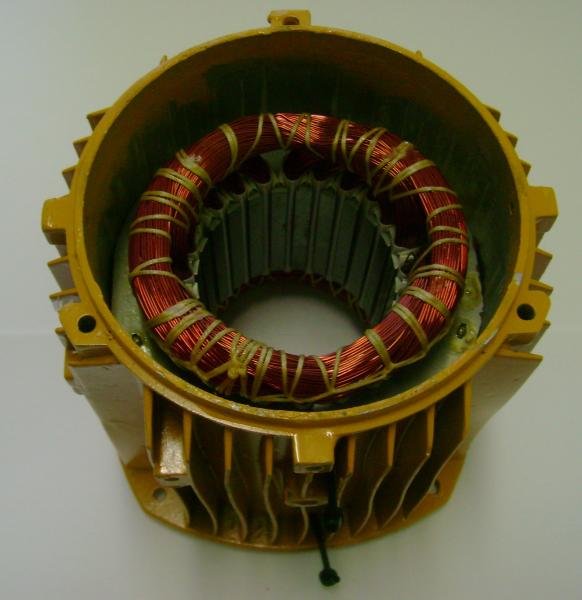 Обозначить начала С1; С2; С3 и концы С4; С5; С6 фазных обмоток на упрощенной схеме обмотки. Пример построения упрощенной схемы обмотки статора показан на рисунке 4.
Обозначить начала С1; С2; С3 и концы С4; С5; С6 фазных обмоток на упрощенной схеме обмотки. Пример построения упрощенной схемы обмотки статора показан на рисунке 4.
Рисунок 3. Порядок построения развернутой схемы обмотки статора.
Двухслойные обмотки применяют, практически, во всех машинах переменного тока, начиная с машин мощностью 15. 16 кВт и кончая крупными турбо- и гидрогенераторами. Основным достоинством двухслойных обмоток является возможность использования укорочения шага для подавления высших гармоник в кривой ЭДС. Кроме того, двухслойные обмотки имеют ряд существенных преимуществ по сравнению с однослойными, например по количеству возможных вариантов выполнения параллельных ветвей, дробного числа пазов на полюс и фазу, равномерности расположения лобовых частей катушек и др.
Составим схему обмотки статора трехфазной машины с Z = 24, 2р = 4, a = 1.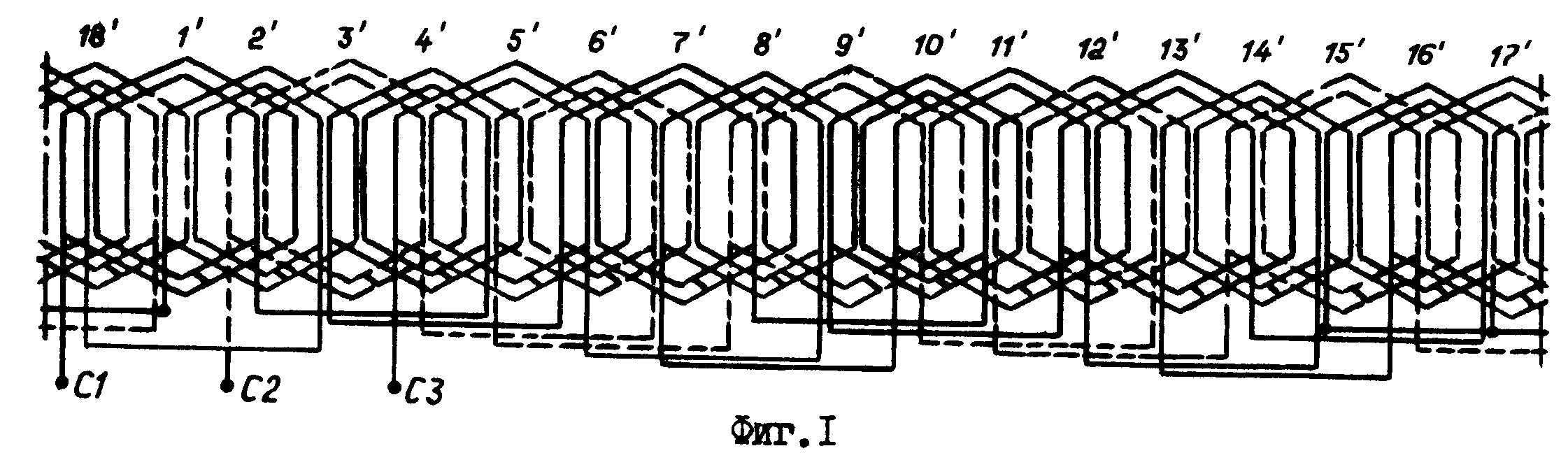 На рис. 3.22. аизображены 24 пары линий (сплошные и пунктирные) лежащих в пазах, и разделенные на четыре полюсных деления. На полюсном делении на каждую фазу приходится по два паза, так как q = 2. Стрелками на сплошных линиях, соответствующих верхним сторонам катушек, показано мгновенное направление токов в катушках, одинаковое во всех фазах в пределах одного полюсного деления и изменяющееся на обратное при переходе к следующему, т. е.
На рис. 3.22. аизображены 24 пары линий (сплошные и пунктирные) лежащих в пазах, и разделенные на четыре полюсных деления. На полюсном делении на каждую фазу приходится по два паза, так как q = 2. Стрелками на сплошных линиях, соответствующих верхним сторонам катушек, показано мгновенное направление токов в катушках, одинаковое во всех фазах в пределах одного полюсного деления и изменяющееся на обратное при переходе к следующему, т. е.
Рис. 3.22. К построению схем двухслойных обмоток:
а – распределение пазов по полюсным делениям; б – образование катушечной группы;
в – соединение катушечных групп одной фазы обмотки
проделаны те же построения, что и в примере на рис. 3.16. Стрелки на пунктирных линиях, соответствующих сторонам катушек, лежащих в нижнем слое паза, не показаны. Направления токов в них зависят от шага обмотки.
Для наиболее простого случая при диаметральном шаге у = τ лобовые части соединяют стороны катушек, лежащие на расстоянии полюсного деления друг от друга. Это соединение показано на рис. 3.22, бдля катушек, верхние стороны которых расположены в соседних пазах на полюсном делении и занимают одну фазную зону. В рассматриваемом примере таких катушек две, так как q = 2. Соединенные последовательно, они образуют одну катушечную группу фазы обмотки.
Это соединение показано на рис. 3.22, бдля катушек, верхние стороны которых расположены в соседних пазах на полюсном делении и занимают одну фазную зону. В рассматриваемом примере таких катушек две, так как q = 2. Соединенные последовательно, они образуют одну катушечную группу фазы обмотки.
Всего катушечных групп в одной фазе двухслойной обмотки столько же, сколько полюсов. На рис. 3.22. в все катушки одной фазы соединены в катушечные группы, а группы — между собой. Для того чтобы направления мгновенных значений токов, отмеченные стрелками, сохранились, катушечные группы соединяют между собой встречно, т. е. конец первой группы сконцом второй, начало второй с началом третьей и т. д. При этом направление обтекания током катушечных групп (показано стрелками над катушечными группами) при переходе от одного полюсного деления к другому меняется на обратное. Обмотки остальных фаз строят аналогично.
Особенность такой схемы — число катушечных групп в фазе равно числу полюсов при встречном включении следующих друг за другом в фазе кату-шечных групп — является закономерностью для всех двухслойных обмоток с 60-градусной фазной зоной.
На рис. 3.23 приведена полная схема обмотки с диаметральным шагом, Z = 24, 2р = 4, а = 1. Начала фаз VI и W1 взяты последовательно через 2q пазовых делений по отношению к началу первой фазы — U1, т. е. через число пазов, соответствующих электрическому углу 120°.
Любое укорочение шага или изменение числа q неменяет принципа построения схемы. При укороченном шаге меняется только ширина катушек (рис. 3.24). Все соединения, как междукатушечные, так и межгрупповые, остаются такими же. Сравнивая между собой схемы обмоток с диаметральным и укороченным шагами, следует отметить, что в первом случае в каждом из пазов размещены стороны катушек, принадлежащих одной и той же фазе. При укорочении шага в части пазов размещают стороны катушек, принадлежащих разным фазам, например в пазах 2, 4, 6, 8 и др. (см. рис 3.24). Относительное количество таких пазов по сравнению с пазами, занятыми сторонами катушек только одной фазы, зависит от принятого укорочения шага. С уменьшением оно возрастает. Это является особенностью обмоток с укороченным шагом.
С уменьшением оно возрастает. Это является особенностью обмоток с укороченным шагом.
Рис. 3.23. Схема двухслойной обмотки с диаметральным шагом,
Рис. 3.23. Схема двухслойной обмотки с укороченным шагом,
Рис. 3.25. Условная схема двухслойной обмотки ,
а – схема соединений трех фаз, б – схема соединений одной фазы
Анализ схем двухслойных обмоток удобнее проводить с помощью так называемых условных схем, которые используют в технической литературе наряду с развернутыми и торцевыми. В таких схемах, в отличие от развернутых, используют условные обозначения не отдельных катушек, а целиком катушечных групп обмотки. Это является логическим продолжением принятого в развернутой схеме упрощенного изображения катушки одним контуром независимо от действительного числа витков в ней, так как все катушки в катушечной группе соединяют между собой только последовательно.
Рис. 3.25, а является условной схемой обмоток, развернутые схемы которых изображены на рис. 3.23 и 3.24. В каждом прямоугольнике, обозначающем катушечную группу, выше диагонали проставлен порядковый номер катушечной группы (начиная с 1-й группы первой фазы) в последовательности расположения их по пазам статора. Ниже диагонали указано количество катушек в данной катушечной группе. Последняя запись введена, чтобы иметь возможность использовать условные схемы для
3.23 и 3.24. В каждом прямоугольнике, обозначающем катушечную группу, выше диагонали проставлен порядковый номер катушечной группы (начиная с 1-й группы первой фазы) в последовательности расположения их по пазам статора. Ниже диагонали указано количество катушек в данной катушечной группе. Последняя запись введена, чтобы иметь возможность использовать условные схемы для
| Рис. 3.26. Условные схемы соединений фазы обмотки с 2р=2при различных числах параллельных ветвей: а – при а = 1; б – при а = 2 | обмоток с дробными числами пазов на полюс и фазу. На полях условной схемы конкретной обмотки должно быть указание о шаге обмотки, так как и при диаметральном, и при укороченном шагах условная схема одна и та же. Для облегчения анализа схемы отметим стрелками над прямоугольниками, изображающими катушечные группы, направления обхода их витков током. Из рис. 3.25, а видно, что соединения катушечных групп каждой фазы обмотки |
полностью идентичны, поэтому то же количество информации может быть представлено более компактно, т. е. изображением схемы только одной фазы обмотки при соответствующих надписях на чертеже (рис. 3.25, б). Такие схемы ясно показывают специфику межгрупповых соединений в обмотке, Практически формирующих нужную полюсность при заданном числе параллельных ветвей, и позволяют рассматривать не отдельные схемы обмоток машин с различными числами Z и q, а представлять их в виде типовых схем для любых Z при определенном числе полюсов. Рассмотрим некоторые схемы двухслойных обмоток с различным числом параллельных ветвей. е. изображением схемы только одной фазы обмотки при соответствующих надписях на чертеже (рис. 3.25, б). Такие схемы ясно показывают специфику межгрупповых соединений в обмотке, Практически формирующих нужную полюсность при заданном числе параллельных ветвей, и позволяют рассматривать не отдельные схемы обмоток машин с различными числами Z и q, а представлять их в виде типовых схем для любых Z при определенном числе полюсов. Рассмотрим некоторые схемы двухслойных обмоток с различным числом параллельных ветвей. | Рис. 3.27 Условные схемы соединений фазы обмотки с 2р = 4 в несколько параллельных ветвей: а – при а = 2, б – при а = 4 |
На рис. 3.26, а приведена условная схема обмотки двухполюсной машины (одной ее фазы), определяющая ее соединение при а = 1. При изменении числа параллельных ветвей
ванных катушечными группами, не должна меняться, поэтому не должны менять своего направления и стрелка над прямоугольниками на схеме обмотки.
| Рис. 3.28. Условные схемы соединений фазы обмотки с 2р=6 с несколькими параллельными ветвями: а – при а = 1, б – при а = 2, в – при а = 3 | Обмотку двухполюсных машин можно выполнить и при а = 2. Условная схема такой обмотки (2р = 2, а = 2) показана на рис. 3.26. б. Как видно, межгрупповые соединения изменены таким образом, что катушечные группы образуют две параллельные ветви, но полярность полюсов остается прежней. На рис. 3.25, бпоказана схема обмотки при 2р = 4, а = 1, а на рис. 3.27, в приведена схема обмотки с тем же числом полюсов, но при а = 2. Полярность катушечных групп в обеих схемах одна и та же. На рис. 3.27,бдана схема той же обмотки, но при а = 4. Условия сохранения полярности катушечных групп соблюдены и при четырех параллельных ветвях. |
Аналогичные варианты схем обмоток при нескольких параллельных ветвях для обмотки шестиполюсной машины приведены на рис. 3.28. Для а = 2и а = 3 возможны иные, чем приведенные на рисунке, варианты соединений, при которых полярность катушечных групп остается правильной.
3.28. Для а = 2и а = 3 возможны иные, чем приведенные на рисунке, варианты соединений, при которых полярность катушечных групп остается правильной.
Принцип построения схем обмоток с большими числами пар полюсов и другими возможными числами параллельных ветвей остается таким же [6].
Содержание
Ведомость комплекта проектной документации 2
Задание на курсовой проект 3
Эскиз магнитопровода асинхронного двигателя, его паз и зуб 4
1. Подготовка данных обмера магнитопровода 9
2. Выбор типа обмотки 12
3. Расчет обмоточных данных 15
4. Построение двухслойной обмотки трехфазного асинхронного двигателя 17
5. Расчет оптимального числа витков 18
6. Расчет числа витков одной секции 20
7. Выбор изоляции паза и лобовых частей обмотки 21
8. Выбор марки и расчет сечения обмоточного провода 25
9. Расчет размеров секции 26
10. Расчет массы обмотки 26
11. Электрическое сопротивление обмотки одной фазы постоянному току в холодном состоянии 26
12. Расчет номинальных данных 27
Расчет номинальных данных 27
13. Задание обмотчику 29
14. Пересчет обмотки на другое напряжение и частоту вращения 29
15. Расчет однослойной обмотки трехфазного асинхронного двигателя 32
Введение
Асинхронные двигатели являются основными преобразователями электрической энергии в механическую и составляют основу электропривода большинства механизмов, используемых во всех отраслях народного хозяйства.
Асинхронные двигатели общего назначения мощностью от 0,06 до 400 кВт напряжением до 1000 В – наиболее широко применяемые электрические машины. В народнохозяйственном парке электродвигателей они составляют по количеству 90%, по мощности – примерно 55%. Потребность, а, следовательно, и производство асинхронных двигателей на напряжение до 1000 В в РБ растёт из года в год.
Асинхронные двигатели потребляют более 40% вырабатываемой в РБ электроэнергии, на их изготовление расходуется большое количество дефицитных материалов: обмоточной меди, электротехнической стали и др. , а затраты на обслуживание всего установленного оборудования уменьшаются. Поэтому создание серий высокоэкономичных и надёжных АД являются важнейшими задачами, а правильный выбор двигателей их эксплуатацией и высококачественный ремонт играют роль в экономии материальных и трудовых ресурсов.
, а затраты на обслуживание всего установленного оборудования уменьшаются. Поэтому создание серий высокоэкономичных и надёжных АД являются важнейшими задачами, а правильный выбор двигателей их эксплуатацией и высококачественный ремонт играют роль в экономии материальных и трудовых ресурсов.
Сроки жизни электрооборудования довольно длительные (до 20 лет). За этот срок в процессе эксплуатации одни из элементов электрооборудования (изоляция) стареют, другие (подшипники) изнашиваются.
Процессы старения и износа выводят электродвигатель из строя. Эти процессы зависят от многих факторов: условий и режима работы, технического обслуживания и т.д. Одна из причин выхода электрооборудования из строя – аварийные режимы: перегрузка рабочей части машины, попадание в рабочую машину посторонних предметов, неполнофазные режимы работы и т.п.
Электрооборудование, вышедшее из строя, восстанавливают. Особенность ремонта в том, что до ремонта двигатель рассчитывают. Это необходимо для проверки соответствия имеющихся обмоточных данных электродвигателя каталожными.
Полученные данные сравниваются с каталожными. Только в случае полного совпадения всех необходимых величин или при малых расхождениях между ними можно приступать к ремонту электродвигателя.
- Подготовка данных обмера магнитопровода
Подготовка данных обмера магнитопровола включает в себя определение следующих показателей:
1. площади полюса в воздушном зазоре ( Qδ), ;
2. площади полюса в зубцовой зоне статора(Qz), ;
3. площади поперечного сечения спинки статора(Qc), ;
4. площади паза в свету(Qп), ;
Первый три площади необходимы для расчета магнитных нагрузок в магнитной цепи асинхронного двигателя, последняя — для расчета сечения обмоточного провода.
В воздушном зазоре сопротивление магнитному потоку Ф по все площади полюса Q равномерное, , поэтому:
, (1)
где — полюсное деление (ширина полюса в воздушном зазоре), м;
— расчетная длина статора, без учета каналов охлаждения, м.
Если каналов нет то =l, где l— полная длинна сердечника статора, мм.
, (2)
где Р – количество пар полюсов, шт.; D— внутренний диаметр сердечника статора, мм.
, (3)
где f- частота питающей сети, Гц; n- частота вращения магнитного поля статора, .
Рассчитаем количество пар полюсов:
Зная количество пар полюсов рассчитаем ширину полюсного деления в воздушном зазоре:
.
Определяем площадь полюса в воздушном зазоре:
.
В зубцовой зоне статора магнитный поток протекает только по листам электротехнической стали, так как ее магнитная проницаемость много больше, чем изоляция листов. Следовательно длина магнитопровода l, а значит и площадь полюса сократятся на площадь занимаемую изоляцией.
Отсюда будет равна произведению активной площади зубца на их количество в полюсе,
, (4)
где — площадь одного зубца, ;
— количество зубцов под полюсом, шт.
, (5)
где — активная длина магнитопровода (без изоляции листов), м.
— расчетная средняя ширина зубца, м.
, (6)
где — коэффициент, учитывающий заполнения пакета магнитопровода сталью, зависящий от рода изоляции и толщины листов стали. Из таблицы 2 [1] выбираем =0,95. Тогда активная длина магнитопровода будет равна:
Средняя ширина зуба определяется из выражения, м
, (7)
где и — ширина зуба, соответственно, в узком и широком местах, м.
Где находится узкое и широкое место у зуба зависит от размеров магнитопровода и формы паза, поэтому вначале находятся размеры зуба у расточки статора , а затем у его основания .
Ширина зуба у расточки, м
, (8)
где е- высота усика паза, мм;
— меньший размер ширины паза, мм;
Рассчитаем ширину зуба у расточки:
Ширина зуба у основания, м
(9)
где h— полная высота паза, мм;
b- больший размер ширины паза, мм.
Рассчитаем ширину зуба у основания:
Из выполненных расчетов следует, что узкое место зуба будет у его основания, а широкое у магнитопровода асинхронного двигателя (АД).Тогда:
Количество зубцов под полюсом определяется из выражения, шт:
, (10)
Определяем площадь одного зуба:
.
Зная площадь одного зуба и количество зубцов под полюсом определим площадь полюса в зубцовой зоне статора:
.
Площадь магнитопровода в спинке статора, перпендикулярная магнитному потоку Ф, равна произведению ее высоты на активную длину магнитопровода ,
, (11)
, (12)
Площадь паза в свету требуется при расчете сечения обмоточного провода. Для ее определения площадь заданной формы паза разбивается осевыми линиями на простые фигуры: полуокружность с диаметром b ’ , трапецию и еще одну полуокружность с диаметром b.
Тогда, площадь паза Qп равна, мм 2 :
, (13)
где Qт — площадь трапеции с основаниями b ’ и b и высотой hт, мм;
Qb’,Qb– площади полуокружностей с диаметрами, соответственно b’ и b, мм 2 .
Высота трапеции определяется по формуле:
(14)
мм.
Тогда, , мм 2
,(15)
мм 2 .
Найдем площади полуокружностей b’ и b соответственно, мм 2
, (16)
мм 2 .
,(17)
мм 2 .
Зная площади трапеции и полуокружностей, определяем площадь паза в свету
мм 2 .
- Выбор типа обмотки
Выбор делается исходя из:
¾ технические возможности выполнения обмотки в данных условиях;
¾ минимального расхода обмоточного провода;
¾ номинальных мощности и напряжения;
¾ достоинств и недостатков обмоток;
Схема статорных обмоток трёхфазных электрических машин разделяют:
¾ по числу активных сторон секций в пазу на однослойные (у которых активная сторона одной катушки занимает весь паз) и двухслойные (активная сторона занимает половину паза),
¾ по размеру шага на обмотки с полным шагом (при y=y’) и с укороченным шагом (при y
Не нашли то, что искали? Воспользуйтесь поиском:
Лучшие изречения: Для студентов недели бывают четные, нечетные и зачетные. 9491 — | 7458 — или читать все.
9491 — | 7458 — или читать все.
91.146.8.87 © studopedia.ru Не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования. Есть нарушение авторского права? Напишите нам | Обратная связь.
Отключите adBlock!
и обновите страницу (F5)
очень нужно
Шаговый двигатель для ЧПУ — ООО «СЗЭМО Электродвигатель»
Шаговые электродвигатели (ШД) используются там, где нужно позиционирование повышенной точности.
Что такое шаговый двигатель? Это синхронный двигатель без щеток, имеющий несколько обмоток. Для фиксации ротора в определенной позиции ток подается в одну из обмоток статора. По поступлении тока в другую обмотку ротор меняет позицию. Это и есть «шаг».
Типы ШД и их устройство
- С переменным магнитным сопротивлением. На статичной части таких ШД есть несколько полюсов. Ротор – зубчатой формы из мягкого материала, ненамагниченный. Если, к примеру, статор 6-полюсный, а ротор из 4 зубцов, то независимых обмоток на двух противоположных статорных полюсах будет 3.
 Шаг мотора будет равен 30°.
Шаг мотора будет равен 30°. - С постоянными магнитами в роторе. Прямолинейные полюсы параллельны оси двигателя. Поскольку магнитный поток мощнее, крутящий момент на порядок выше, чем в ШД первого типа. Шаг такого мотора – от 7,5 до 15°.Может быть от 24 до 48 шагов на оборот.
- Гибридные ШД (ГШД). Установка зубцов в направлении оси сокращает величину шага. Крутящий момент и скорость возрастают. Обычно бывает от 100 до 400 шагов за оборот при угле шага 0,9-3,6°. Наиболее распространен биполярный ШД nema. Только в гибридных ШД применяется режим микрошага. Управление обмотками независимое. Плавность вращения подвижной части повышена. Возможны 51200 шагов за оборот. Точность позиционирования оптимальна. Обеспечивается более низкая магнитная проводимость зазоров относительно удельной проводимости зубцов.
ШД по типу обмоток подразделяются на:
- Биполярные с одной обмоткой для каждой фазы. Переплюсовка драйвером изменяет направление магнитного поля.

- Униполярные. В каждой фазе одна обмотка, но из середины каждой обмотки имеется отвод. Направление поля меняется за счет переключения используемой половины обмотки. Драйвер имеет только 4 ключа.
Характеристики ШД
- Крутящий момент. Его измеряют в кг-сила-см. Чем выше показатель зависимости вращательного момента от частоты вращения, тем быстрее ШД набирает обороты после включения.
- Удерживающий момент или сила блокирования ротора статором при включенном, но не запущенном моторе. Его измеряют в унциях-на-дюйм.
- Тормозящий или стопорный момент, т.е. сила, которая удерживает ротор от вращения без подачи тока. В ГШД эта величина в 10 раз меньше величины силы удерживания ротора от вращения при полной подаче тока. Измеряется в унциях-на-дюйм.
- Номинальное напряжение, зависящее от индуктивности обмоток. Указывается в вольтах. По нему определяют оптимальное напряжение для подачи в мотор. Наилучшее напряжение превышает номинальное.
 Превышение силы подаваемого тока ведет к перегреву и поломке двигателя. При недостаточном напряжении он не запустится. Оптимальную силу тока определяют по формуле U = 32 x√ L. L – индуктивность обмотки, а U – искомое значение.
Превышение силы подаваемого тока ведет к перегреву и поломке двигателя. При недостаточном напряжении он не запустится. Оптимальную силу тока определяют по формуле U = 32 x√ L. L – индуктивность обмотки, а U – искомое значение. - Диэлектрические испытания. По максимальному напряжению, которое выдерживает обмотка в течение определенного времени, определяют сопротивление мотора перегрузкам.
- Момент инерции ротора – это скорость разгона ШД, которую измеряют в грамм-квадратных см.
- Число полных шагов за оборот. Чем оно больше, тем мощнее и быстрее мотор.
- Длина корпуса без учета вала и общая масса или вес изделия. По габаритам и массе определяют, когда нужен компактный двигатель, а когда – крупнее и мощнее.
К примеру, в ШД PL57h51 PL57 – ширина-высота (диаметр) по квадратному фланцу 57 мм, h51 – длина двигателя без вала, равная 41 мм. Диаметр двигателя влияет на все его моменты больше, чем длина.
Инкодеры, драйверы и подключение
Специальные драйверы подключают к компьютерному LTP-порту и посредством их управляют ШД. Драйвер – это практически блок управления ШД. В шаговых двигателях для ЧПУ к драйверу присоединяют 4 вывода ШД и управляющие провода с контроллера ЧПУ, и плюс и минус с блока питания. Поступая в драйвер, сигналы контроллера управляют переключением ключей силовой схемы питающего напряжения. Через эти ключи питающее напряжение идет на двигатель.
Драйвер – это практически блок управления ШД. В шаговых двигателях для ЧПУ к драйверу присоединяют 4 вывода ШД и управляющие провода с контроллера ЧПУ, и плюс и минус с блока питания. Поступая в драйвер, сигналы контроллера управляют переключением ключей силовой схемы питающего напряжения. Через эти ключи питающее напряжение идет на двигатель.
Максимальный выдаваемый на выводы для обмоток мотора ток нужного напряжения – основной критерий подбора драйвера. Идущий с драйвера ток не должен быть ниже тока, потребляемого мотором. Параметры выходного напряжения выставляются переключателями на драйвере.
В двигателе может быть от 4 до 6 проводов, и от их количества зависит порядок подключения ШД. Биполярные механизмы сочетаются только с 4-проводными двигателями.
На каждые 2 обмотки приходится 2 провода. Самые мощные 6-проводные моторы могут подключаться и к биполярным, и к униполярным устройствам, и в них на каждую обмотку приходится средний провод или центр-кран и 2 провода. В униполярных моторах на каждую обмотку приходятся 3 провода. Два из них подсоединяют к транзисторам, а центр-кран – к источнику питания.
В униполярных моторах на каждую обмотку приходятся 3 провода. Два из них подсоединяют к транзисторам, а центр-кран – к источнику питания.
В 5-проводных ШД центральные провода вместе с остальными входят в общий кабель. Предпочтительно найти средний провод и соединить его с другими проводниками.
Датчики, подающие сигналы программному обеспечению, называют энкодерами и часто применяют с ШД. Энкодер нужен, когда налицо нелинейная зависимость от количества шагов.
Области использования, достоинства и недостатки
Шаговые двигатели для ЧПУ широко применяются в координатных столах и системах автоматизации. Панелям управления, программирования и станкам с ЧПУ не обойтись без ШД.
ШД – достойная альтернатива серводвигателю, поскольку, в отличие от него:
- Хорошо работает при весьма разнообразных нагрузках.
- Имеет постоянный угол поворота и стандартизированные габариты.
- Имеет низкую стоимость.
- Прост в монтаже и эксплуатации, долговечен и надежен.
- Пропуская шаги, не сгорает при крайне высоких оборотах.
Тем не менее, ШД уступает серводвигателю в том, что:
- У него мал КПД и велико энергопотребление.
- Увеличение частоты оборотов резко снижает крутящий момент.
- Мощность слишком мала для таких габаритов и веса.
- Велик нагрев двигателя при работе.
- Мотор слишком шумит на высокой и средней частотах.
ТЕХНОЛОГИЯ УКЛАДКИ ВСЫПНОЙ ДВУХСЛОЙНОЙ ОБМОТКИ ЭЛЕКТРОДВИГАТЕЛЯ. — УКЛАДКА ОБМОТОК СТАТОРА ЭЛЕКТРОДВИГАТЕЛЯ И БАНДАЖИРОВКА ОБМОТОК. — ТЕХНОЛОГИЯ РЕМОНТА ЭЛЕКТРОДВИГАТЕЛЕЙ
Подготовка статора электродвигателя к укладке. Перед укладкой всыпной двухслойной обмотки вручную статор подготовляют к укладке обмотки и устанавливают пазовые короба так же, как и при однослойной обмотке. Все катушки обычных двухслойных обмоток имеют одинаковые размеры. Катушечные группы в обмотках с целым числом пазов на полюс и фазу содержат одинаковое число катушек, поэтому безразлично, с какой катушечной группы начинать укладку обмотки.
Укладка катушечных групп в обмотках с дробным числом q. В обмотках с дробным числом q катушечные группы укладывают строго в последовательности, указанной в схеме обмотки, т. е. в порядке чередования больших и малых катушечных групп, принятом для данной обмотки.
Сложность укладки двухслойных всыпных обмоток. Сложность укладки двухслойных всыпных обмоток заключается в том, что одна из сторон катушек должна лежать в верхней части паза, а другая — в нижней. Поэтому первые катушки не могут быть уложены в пазы обеими сторонами. Вначале укладываются только стороны этих катушек, лежащие в нижних частях пазов.
Укладка катушек первого шага.
Укладка катушек первого шага. Замковые катушки. Вторые стороны катушек временно размещают над пазами, в которые они должны быть уложены. Число таких катушек в обмотке равно шагу, выраженному в зубцовых делениях. Их называют катушками первого шага или замковыми. После того как уложены одни стороны таких катушек, все последующие катушки обмотки устанавливаются в пазы уже окончательно обеими сторонами на предназначенные им места. Требования к укладке проводников катушек такие же, как и при укладке однослойных обмоток, т. е. проводники должны лежать в пазу параллельно, без изгибов и перекрещиваний, лобовые части катушек располагаться симметрично с обоих торцов статора и т. п.
После того как уложены одни стороны таких катушек, все последующие катушки обмотки устанавливаются в пазы уже окончательно обеими сторонами на предназначенные им места. Требования к укладке проводников катушек такие же, как и при укладке однослойных обмоток, т. е. проводники должны лежать в пазу параллельно, без изгибов и перекрещиваний, лобовые части катушек располагаться симметрично с обоих торцов статора и т. п.
Укладка катушек верхней части паза. Прежде чем начать заполнение верхней части паза, уложенные проводники нижней стороны другой катушки уплотняются с помощью подбоек и сверху на них устанавливается межслойная прокладка. Лишь после этого можно начинать укладывать в паз проводники катушки верхнею слоя. Особенно сложной операцией является укладка последних катушек, нижние стороны которых должны быть размешены в пазы под верхними сторонами катушек первого шага.
Поднятые стороны замковых катушек статора.
Подъем шага обмотки. Стороны замковых катушек приподнимаются и закрепляются внутри статора на некоторой высоте над пазами. Эту операцию называют подъемом шага. Под них пропускают в пазы проводники нижних сторон последних катушек, уплотняют и устанавливают межслойные прокладки и после этого укладывают в верхнюю часть паза поднятые стороны замковых катушек, т. е. как бы замыкают замок обмотки (отсюда название этих катушек).
Стороны замковых катушек приподнимаются и закрепляются внутри статора на некоторой высоте над пазами. Эту операцию называют подъемом шага. Под них пропускают в пазы проводники нижних сторон последних катушек, уплотняют и устанавливают межслойные прокладки и после этого укладывают в верхнюю часть паза поднятые стороны замковых катушек, т. е. как бы замыкают замок обмотки (отсюда название этих катушек).
Изолировка двухслойных обмоток. Межслойные прокладки в пазах должны полностью изолировать все проводники нижней стороны катушки от проводников верхнею слоя. Совершенно недопустимо, чтобы даже один проводник из одного слоя обмотки проскальзывал в другой, так как это неминуемо приведет к пробою изоляции при испытаниях или во время работы машины.
Формирование лобовых частей обмотки. Лобовые части катушек выравниваются по мере укладки. Они должны быть строго симметричны с обоих торцов статора. После укладки последней катушки катушечной группы в лобовых частях устанавливаются межфазовые прокладки. Лобовые части следующих катушек прижимают прокладки, и они не сдвигаются с места до конца обмоточных работ. При необходимости после укладки всех катушек прокладки подбивают до упора в торцы статора, после чего подрезают но форме лобовых частей.
Лобовые части следующих катушек прижимают прокладки, и они не сдвигаются с места до конца обмоточных работ. При необходимости после укладки всех катушек прокладки подбивают до упора в торцы статора, после чего подрезают но форме лобовых частей.
Источник:
Полюс статора — обзор
4.6 Методология намотки катушки
На рис. 4.20 показан метод намотки катушки шагового двигателя в геометрической схеме, соответствующей форме статора. На рис. 4.21 показаны обмотки полюсного наконечника статора в физическом контексте. На рисунках можно увидеть пару элементарных катушек, намотанных бифилярно вокруг каждого выступающего полюса статора. Поскольку имеется 8 явных полюсов статора, имеется 16 элементарных катушек. Обратите внимание, что каждая катушка с альтернативным явным полюсом подключена, то есть A1 подключена к A2, подключена к A3, подключена к A4, и аналогично, B1 подключена к B2, подключена к B3, подключена к B4.Другими словами, нет связи между соседними катушками. Система подключения остроумна и лучше всего показана на принципиальной схеме на рис. 4.22.
Система подключения остроумна и лучше всего показана на принципиальной схеме на рис. 4.22.
Рис. 4.20. Схема электрических соединений 8 выступающих полюсов статора шагового двигателя. Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, составляющих всего 16 элементарных катушек.
Рис. 4.21. Электрическая схема, показанная в физическом контексте, восьми явнополюсных обмоток катушки шагового двигателя.Обратите внимание, что каждый выступающий полюс имеет пару бифилярных обмоток катушек, что в общей сложности составляет 16 катушек. На диаграмме сложно следовать. Нужен острый карандаш, чтобы проследить каждую проволоку от начальной точки до конечной. Будьте осторожны, чтобы различать провода и железный статор.
Рис. 4.22. Схема электрических соединений 16 элементарных катушек обмоток выступающих полюсов статора. Обратите внимание на оригинальное расположение обмоток. Имеется восемь бифилярных катушек. Катушки с бифилярной обмоткой имеют противоположную проводку: «с обратной связью» и «с прямой проводкой». ”Расположение обмоток означает, что возможна как униполярная, так и биполярная последовательность переключения.
”Расположение обмоток означает, что возможна как униполярная, так и биполярная последовательность переключения.
Система электропроводки позволяет использовать схему силового привода однополярного привода или схему силового привода биполярного привода. Для униполярной схемы привода необходимо использовать желтый и белый разъемы, как показано на рис. 4.21 и 4.22, но биполярный привод — нет. Оказывается, в настоящее время схема униполярного привода полезна только в качестве академического упражнения. Авторы разработали униполярную схему однажды, чтобы продемонстрировать студентам, и эта схема будет показана позже, но биполярная схема действительно сделала однополярную схему устаревшей.Это связано с улучшением характеристик и снижением стоимости технологии транзисторных интегральных схем, например, драйвера Киза, рис. 4.1. Униполярный метод управления неэффективен, потому что только четверть обмоток используется в любое время для создания крутящего момента. Также требуются резисторы потери мощности, чтобы катушки могли питаться высоким напряжением питания, чтобы обеспечить высокую производительность, и это приводит к потере мощности в силовых резисторах.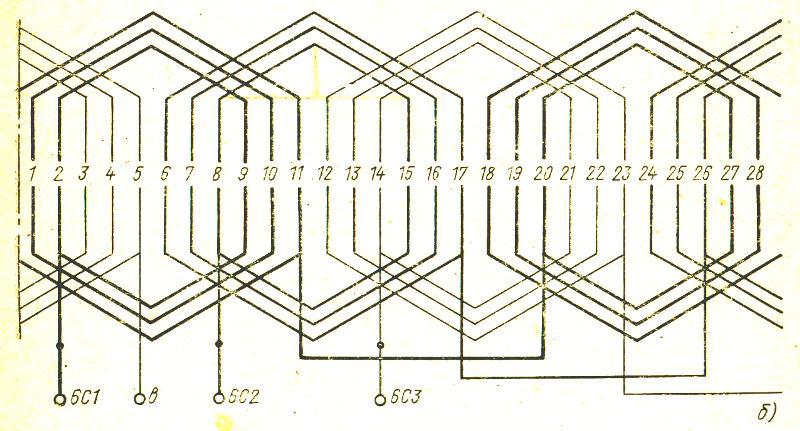 Таким образом, униполярный метод управления неэффективен ни в электрическом, ни в электромагнитном отношении.Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя. С другой стороны, метод управления биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
Таким образом, униполярный метод управления неэффективен ни в электрическом, ни в электромагнитном отношении.Основное преимущество униполярного привода состоит в том, что требуется всего четыре транзистора. Фактически, резисторы потери мощности можно сделать резервными с помощью схемы возбуждения прерывателя. С другой стороны, метод управления биполярной схемой при использовании схемы прерывания с управлением током является высокоэффективным и имеет высокие характеристики, поскольку отсутствуют резисторы потери мощности, катушки используются на 50%, а механическая выходная мощность увеличивается.
На рис. 4.22 показана принципиальная схема бифилярных обмоток, намотанных на каждый выступающий полюсный наконечник статора.Здесь можно увидеть, что каждая бифилярная обмотка подключена противоположно, как «вперед», так и «назад». Причина этого показана на рис. 4.23. Рис. 4.23A и B показывают два типа униполярного соединения набора обмоток статора либо набора обмоток, A1, A2, A3, A4, либо набора обмоток, B1, B2, B3, B4. Точно так же на фиг. 4.23A и B показывают два типа биполярного соединения. Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток.Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, ммс, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Точно так же на фиг. 4.23A и B показывают два типа биполярного соединения. Эти рисунки показывают, что однополярное соединение использует только половину доступного набора обмоток, тогда как биполярное соединение использует весь набор обмоток.Кроме того, обмотки, независимо от того, соединены ли они как униполярные или биполярные, создают чередующиеся направления магнитодвижущей силы, ммс, которые будут вызывать соответствующее притяжение полюсных наконечников, которые будут показаны ниже.
Рис. 4.23. Создание магнитного поля с помощью униполярных и биполярных соединений обмоток. (A) Униполярное соединение # 1. (B) Униполярное соединение # 2. (C) Биполярное соединение # 1. (D) Биполярное соединение # 2.
Прежде чем обсуждать электромагнитное силовое взаимодействие между полюсными наконечниками ротора и статора, необходимо пояснить геометрическую конструкцию.Прежде всего, ротор имеет 50 зубцов, равных промежуткам между ними, другими словами, 50 зубцов и 50 зазоров с единичным отношением зубьев к зазору, рис.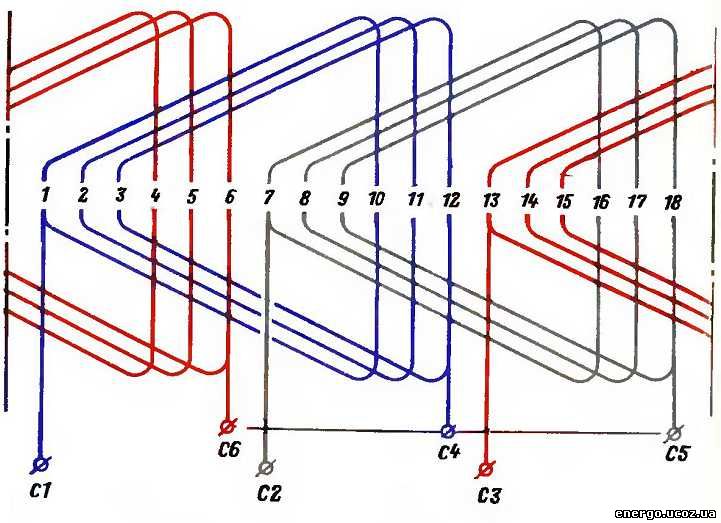 4.6 и 4.24. Статор имеет восемь полюсных наконечников, расположенных на равном расстоянии друг от друга, то есть каждый полюсный наконечник разделен на 45 градусов. Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 «недостающих зуба». Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис.4.24.
4.6 и 4.24. Статор имеет восемь полюсных наконечников, расположенных на равном расстоянии друг от друга, то есть каждый полюсный наконечник разделен на 45 градусов. Каждый полюс статора имеет 6 зубцов, которые идентичны зубьям и зазорам ротора. Таким образом, на всех полюсных наконечниках статора 8 × 6 = 48 зубцов. У ротора 50 зубцов, так что у статора 2 «недостающих зуба». Поскольку между полюсными наконечниками статора имеется восемь зазоров, недостающие зубья полюсного наконечника составляют ½ шага между полюсными наконечниками статора, рис.4.24.
Рис. 4.24. Геометрическая схема ротора и статора.
Теперь обратимся к рис. 4.24 и 4.25 вверху слева, и обратите внимание, что на изображении ротор показан с шестью зубьями, выровненными с шестью зубьями полюсного наконечника статора A1. Из-за геометрии статора и ротора зубья ротора также совпадают с полюсным наконечником A3 статора, который диаметрально противоположен A1. В то же время шесть зазоров ротора , а не зубьев, совмещены с шестью зубьями полюсов статора A2 и A4, другими словами, имеется выравнивание разности фаз на 180 градусов с полюсами A1 и A3.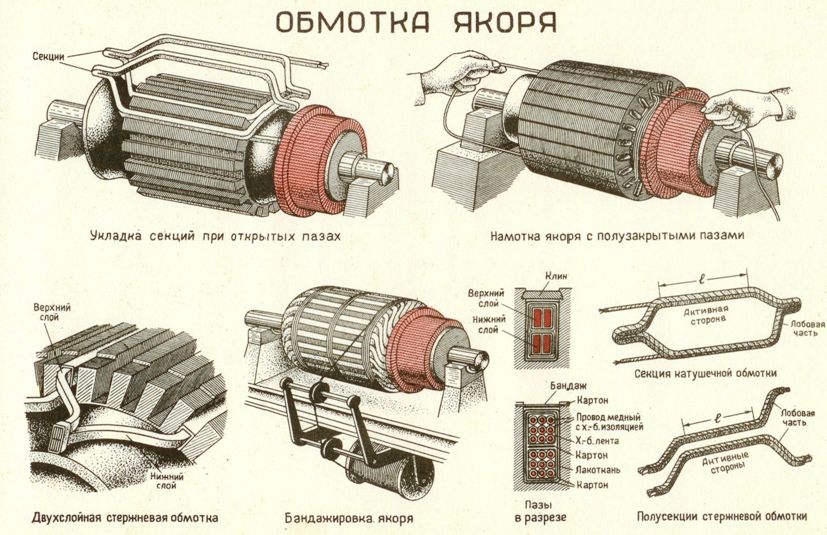 Если теперь ротор повернуть на шага зубьев по часовой стрелке, то есть на 1,8 градуса, то шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
Если теперь ротор повернуть на шага зубьев по часовой стрелке, то есть на 1,8 градуса, то шесть зубцов ротора будут совмещены с зубьями полюсов B1 и B3, а шесть зазоров ротора будут совмещены с зубьями полюсов B2 и B4. Если ротор вращается на шага зуба против часовой стрелки, то выравнивание зазора зуба ротора B2, B4 переключается с B1, B3.
Рис. 4.25. Приращения шага вращения ротора, показывающие совмещения зубцов ротора и статора и зазора между зубьями статора, которые происходят каждые 1/200 оборота, то есть каждые 1,8 градуса.
Если теперь ротор повернуть еще на 1,8 градуса по часовой стрелке, от положения ротора 0 градусов до положения ротора 1,8 градуса, рис. 4.25 вверху справа, то будет совмещение зубцов ротора к зубцу статора с B1 и B3. и между зазором ротора и зубом статора с B2 и B4. Третья из четвертых комбинаций совмещения зубьев и зазора происходит при положении ротора 3,6 градуса, рис. 4.25 внизу справа и четвертая комбинация при положении ротора 5,4 градуса, рис. 4.25 внизу слева. Эти положения ротора приводятся в действие последовательными электромагнитными силами, которые будут объяснены ниже.Последовательность означает, что ротор шагового двигателя может вращаться по часовой или против часовой стрелки с шагом 1,8 градуса, то есть 200 шагов / оборот, и, таким образом, шаговый двигатель известен как шаговый двигатель с 200 шагами / оборот.
4.25 внизу слева. Эти положения ротора приводятся в действие последовательными электромагнитными силами, которые будут объяснены ниже.Последовательность означает, что ротор шагового двигателя может вращаться по часовой или против часовой стрелки с шагом 1,8 градуса, то есть 200 шагов / оборот, и, таким образом, шаговый двигатель известен как шаговый двигатель с 200 шагами / оборот.
Еще одна интересная особенность такого расположения магнитных сил состоит в том, что силы, действующие на ротор в плоскости бумаги, находятся в статическом равновесии, поэтому нет сил, перпендикулярных оси ротора, которые будут возбуждать вибрации и шум или вызывать изгиб. оси, и при этом не будет сил, закрывающих очень маленький воздушный зазор.Даже несмотря на то, что сумма больших сил на роторе в плоскости бумаги равна нулю, момент этих сил вокруг оси вращения не равен нулю; фактически они суммируются, чтобы помочь друг другу обеспечить рабочий крутящий момент выходного ротора 2 Н · м; это еще одна дань уважения разработчикам шагового двигателя. Также здесь следует сказать, что инженеры-производители заслуживают особой признательности за недорогое прецизионное изготовление и сборку «скромного» шагового двигателя.Теперь мы переходим к обсуждению распределения магнитного потока в шаговом двигателе.
Также здесь следует сказать, что инженеры-производители заслуживают особой признательности за недорогое прецизионное изготовление и сборку «скромного» шагового двигателя.Теперь мы переходим к обсуждению распределения магнитного потока в шаговом двигателе.
Рекомендации по проектированию обмотки статора (электродвигатели)
5.1.3
Бесщеточные двигатели постоянного тока изначально в большом количестве разрабатывались для шпиндельных приводов в дисковых накопителях Winchester. Ранние конструкции были трехфазными, позже переходили к двухфазным, а затем однофазным из-за очень медленных требований к запуску, очень малых нагрузок трения и необходимости снижения стоимости единицы на всех уровнях. Рынки промышленного оборудования и станков начали и продолжают использовать трехфазные двигатели BLDC в своих приложениях с регулируемой скоростью, переменной нагрузкой и высокими пусковыми параметрами.Подавляющая популярность трехфазных двигателей BLDC делает акцент в этом подразделе на трехфазные обмотки. Многие из первоначальных работ по проектированию различных схем обмотки можно проследить до 1920-х годов и ранее, основываясь на работе, проделанной с обмотками трехфазного переменного тока.
Многие из первоначальных работ по проектированию различных схем обмотки можно проследить до 1920-х годов и ранее, основываясь на работе, проделанной с обмотками трехфазного переменного тока.
В этом подразделе рассматриваются различные соединения линий обмотки, основные схемы и схемы намотки, различные постоянные обмотки, а также выбор и методы проектирования обмоток.
Основные конфигурации обмотки. Есть и другие базовые решения, которые должен принять инженер-конструктор, прежде чем можно будет приступить к проектированию двигателя BLDC.Ранее определено количество фаз, здесь их три. Следующим по важности является количество полюсов. Использование двух полюсов сокращается, а использование шести или восьми полюсов увеличивается. Четырехполюсные двигатели BLDC являются одними из самых популярных на сегодняшний день. Здесь используются двух- и четырехполюсные двигатели BLDC, но правила для двух и четырех полюсов могут быть распространены на большее количество полюсов. Количество пазов (и зубьев) статора и рисунок обмотки являются ключевыми конструктивными решениями. Этот раздел посвящен рассмотрению важных параметров этих двух проектных решений.
Этот раздел посвящен рассмотрению важных параметров этих двух проектных решений.
В трехфазном двигателе есть три обмотки или фазы, расположенные на расстоянии 120 ° друг от друга. На рис. 5.30 показано расположение 6 катушек в типичном 12-слотовом статоре. Двухполюсный ротор (не показан) будет вращаться, когда три обмотки будут запитаны в последовательности ABC, так как A-A ‘, B-B’, а затем CC будут запитаны последовательно. Трехфазная обмотка всегда развивает положительный пусковой момент, независимо от того, где ротор начинает свое движение.
РИСУНОК 5.30 Базовая схема трехфазной обмотки.
Существует множество соединений линий обмотки, которые можно использовать в трехфазных системах привода. На рис. 5.31 показаны различные конфигурации. Полуволновая звезда — это простейшая трехфазная конфигурация линии (рис. 5.31a). В нем используются три линии питания и одна обратная линия (четыре вывода). Возбуждение показано рядом со схемой на рис. 5.31a. Только 33 процента (один вывод) полуволновых обмоток «звезда» находятся под напряжением в любой момент работы. Вторая звездообразная обмотка, двухполупериодная звездочка (рис.5.31b) имеет только три вывода, но 66 процентов (два вывода) обмоток работают одновременно. Схема возбуждения показана справа от схемы.
Только 33 процента (один вывод) полуволновых обмоток «звезда» находятся под напряжением в любой момент работы. Вторая звездообразная обмотка, двухполупериодная звездочка (рис.5.31b) имеет только три вывода, но 66 процентов (два вывода) обмоток работают одновременно. Схема возбуждения показана справа от схемы.
Третья основная схема соединения обмоток — треугольник, показанный на рис. 5.31c. Он имеет ту же схему возбуждения, что и двухполупериодная звезда. Конфигурация обмотки треугольником используется более широко, чем звездочка, в двигателях с дробной мощностью (<746 Вт). Звездочка более популярна среди пользователей двигателей BLDC с интегральной мощностью большего размера.Последняя обмотка, которую следует рассмотреть, - это соединение линии независимой обмотки (рис. 5.31d). В этой схеме каждая обмотка независима от своего соседа. Схема возбуждения более сложная, но каждая обмотка может работать параллельно, тем самым распределяя общий ток. Обмотки по-прежнему расположены на расстоянии 120 ° друг от друга.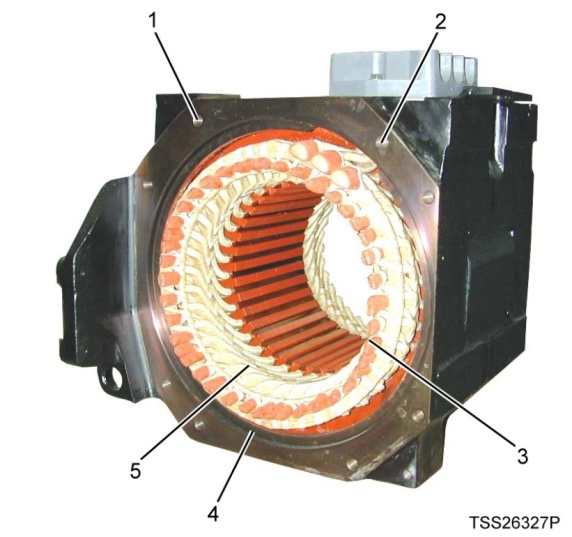 Эта конфигурация обмоток до сих пор использовалась ограниченно.
Эта конфигурация обмоток до сих пор использовалась ограниченно.
Самыми популярными конфигурациями обмоток являются двухполупериодная звезда и треугольник. В сбалансированной звездообразной конфигурации линейный ток и ток катушки (фазы) равны,
РИСУНОК 5.31 Популярные схемы подключения обмоток трехфазного двигателя BLDC: (a) звезда (полуволна), (b) звезда (полная волна), (c) треугольник и (d) независимый .
, ток нейтрали равен нулю, а линейное напряжение в V3 раз больше фазного напряжения. При сбалансированном соединении треугольником линейное напряжение и напряжение катушки (фазы) равны, но токи катушки в 1 / V3 раз превышают линейные токи.
Образцы намотки ключей. Есть много типов схем намотки, которые можно использовать. Здесь перечислены четыре основных типа намотки:
1.Постоянный интегральный шаг — нахлест обмотки (полный)
2. Переменный шаг — концентрическая обмотка
3. Постоянный дробный шаг — нахлест для четных или нечетных пазов статора
4. Полушаг
Полушаг
Каждая из этих схем обмотки имеет две катушки на паз статора . Обозначается один тип обмотки, а именно полюсная обмотка, в которой на каждый паз приходится только одна катушка. Последующие обмотки полюсов очень популярны в однофазных двигателях переменного тока малой мощности.
Таблица 5.7 переработана из работы Вейнотта и Мартина (1987).Он отображает различные комбинации пазов статора и полюсов ротора, а также максимальное количество комбинаций параллельных цепей с определенной комбинацией пазов и полюсов. Для простоты здесь используются статоры с 12 или 24 пазами, чтобы проиллюстрировать различные схемы обмотки. В одном случае статор с 15 пазами используется для иллюстрации нахлесточной обмотки с нечетным пазом и дробным шагом.
ТАБЛИЦА 5.7 Слоты по сравнению с полюсами и параллельными соединениями по сравнению с количеством катушек на полюс на фазу
| 2 полюса | 4 полюса | 6 полюсов | 8 полюсов | ||||
| Катушки | Катушки | Катушки | Катушки | ||||
| по | по | по | по | ||||
| Слоты | фаза | фаза | фаза | фаза | |||
| или | по | по | по | по | |||
| катушек | Цепи | полюс | Цепи | полюс | Цепи | полюс | Цепи полюса |
| 6 2 1 | – | – | – | ||||
| 9 | 1 | – | – | – | |||
| 12 | 2 | 241 | – | – | |||
| 15 | 1 | 1 | 1г. , , | – | – | ||
| 18 | 2 | 3 | 2 | ВА | 61 | – | |
| 21 | 1 | 3Yi | 1 | НП * | х | – | |
| 24 | 2 | 4 | 4 | 2 | НП | Х 8 1 | |
| 27 | 1 | 4лет, | 1 | 2Y4 | 3 | 1г., | 11Y8 |
| 30 | 2 | 5 | 2 | 2Y-2 | НП | х | 2 1Y4 |
| 33 | 1 | 1 | 23/ | НП | х | 1 1% | |
| 36 | 2 | 6436 | 2 4 1 год | ||||
| 39 | 1 | 1 | 3Y4 | НП | х | 1 15/8 | |
| 42 | 2 | 7 | 2 | 3Y-2 | НП | х | 2 13/4 |
| 45 | 1 | 7Yi | 1 | 33/ | 3 | 2Yi | |
| 48 | 2 | 8 | 4 | 4 | НП | х | 82 |
Если используется обмотка статора с 12 пазами, доступны две интегральные накатные обмотки с полным шагом, одна для двух полюсов, а другая — для четырех.
P x Ph = nS (5.1)
где P = количество полюсов Ph = количество фаз S = количество пазов статора n = целое число 1, 2, 3,… n
Если P = 2, Ph = 3, и S = 12, тогда n = 2, целое число. На рисунке 5.30 показана базовая схема расположения пазов обмотки для 12-контактной 2-полюсной 3-фазной конфигурации с 2 обмотками на полюс на фазу (n = 2). Схема катушки для этой конфигурации обмотки показана на рис. 5.32 и 5.33 как конфигурация последовательного соединения «звезда» и как конфигурация параллельного соединения «звезда» соответственно. В этой конструкции действительно используется 12 катушек, но показаны только 6.Есть две катушки с ходом от 1 до 7 — одна вставлена с правой стороны (направление CW), вторая вставлена с левой стороны (направление CCW), а также двойная на других пяти катушках, вставленных, как описано ранее. Обратите внимание на положение зубьев статора с 12 пазами. Шаг паза (рядом с пазом) составляет 360/12 или 30 ° механический или электрический. Угловое расположение обмотки фазы 2 (направление CW) составляет всего 60 °. Предполагается, что он составляет 120 °. Симметрия решает проблему, если к 60 ° добавить 180 ° (изменение полярности) для получения механических или электрических 240 °.Таким образом, соединения фаз 1, 2, 3 обмотки, показанные на рис. 5.32, приведут к вращению против часовой стрелки.
Предполагается, что он составляет 120 °. Симметрия решает проблему, если к 60 ° добавить 180 ° (изменение полярности) для получения механических или электрических 240 °.Таким образом, соединения фаз 1, 2, 3 обмотки, показанные на рис. 5.32, приведут к вращению против часовой стрелки.
Варианты последовательного и параллельного подключения очень важны с практической точки зрения при выборе сечения магнитопровода. Легче упаковать магнитные провода меньшего размера в
РИСУНОК 5.32. Соединение серии для 2-полюсного 12-контактного бесщеточного двигателя постоянного тока с звездообразной обмоткой.
РИСУНОК 5.33 Параллельное соединение для 2-полюсного 3-фазного двигателя с звездообразной обмоткой 12-канальный бесщеточный двигатель постоянного тока, схема намотки внахлест с постоянным шагом.
Паз статора BLDC, чем у больших. Поскольку общее количество витков на фазу прямо пропорционально крутящему моменту, размещение всех необходимых витков (N на фазу) в одной катушке с меньшими магнитными проводами, а затем параллельное соединение катушек даст дополнительное пространство для большего количества витков. Это фактор упаковки.
Это фактор упаковки.
Недостатком использования параллельных катушек является то, что для правильного соединения катушек необходимо использовать оба набора выводов катушек (см. Рис. 5.33). На рис. 5.34 показано, как две катушки будут вставлены в соседние пазы статора.Помните, что для этой 2-полюсной схемы обмотки с 12 пазами статора предусмотрено 2 паза на катушку на фазу.
РИСУНОК 5.34 Ламинирование с 12 пазами, 2 полюса, 3-фазный узор внахлест с постоянным шагом.
На рисунке 5.35 показана схема намотки 4-полюсного статора BLDC с постоянным шагом и 12 пазами. Теперь в этой обмотке только одна катушка на полюс на фазу (n = 1), как показано в следующем уравнении:
4 полюсов x 3 фазы = 12 слотов
n = 1 катушка на полюс на фазу (5.2)
Четыре катушки на фазу могут быть подключены как четыре катушки в последовательном соединении или четыре катушки в параллельном соединении.Также возможно соединить две катушки последовательно и две катушки параллельно для получения последовательно-параллельного соединения.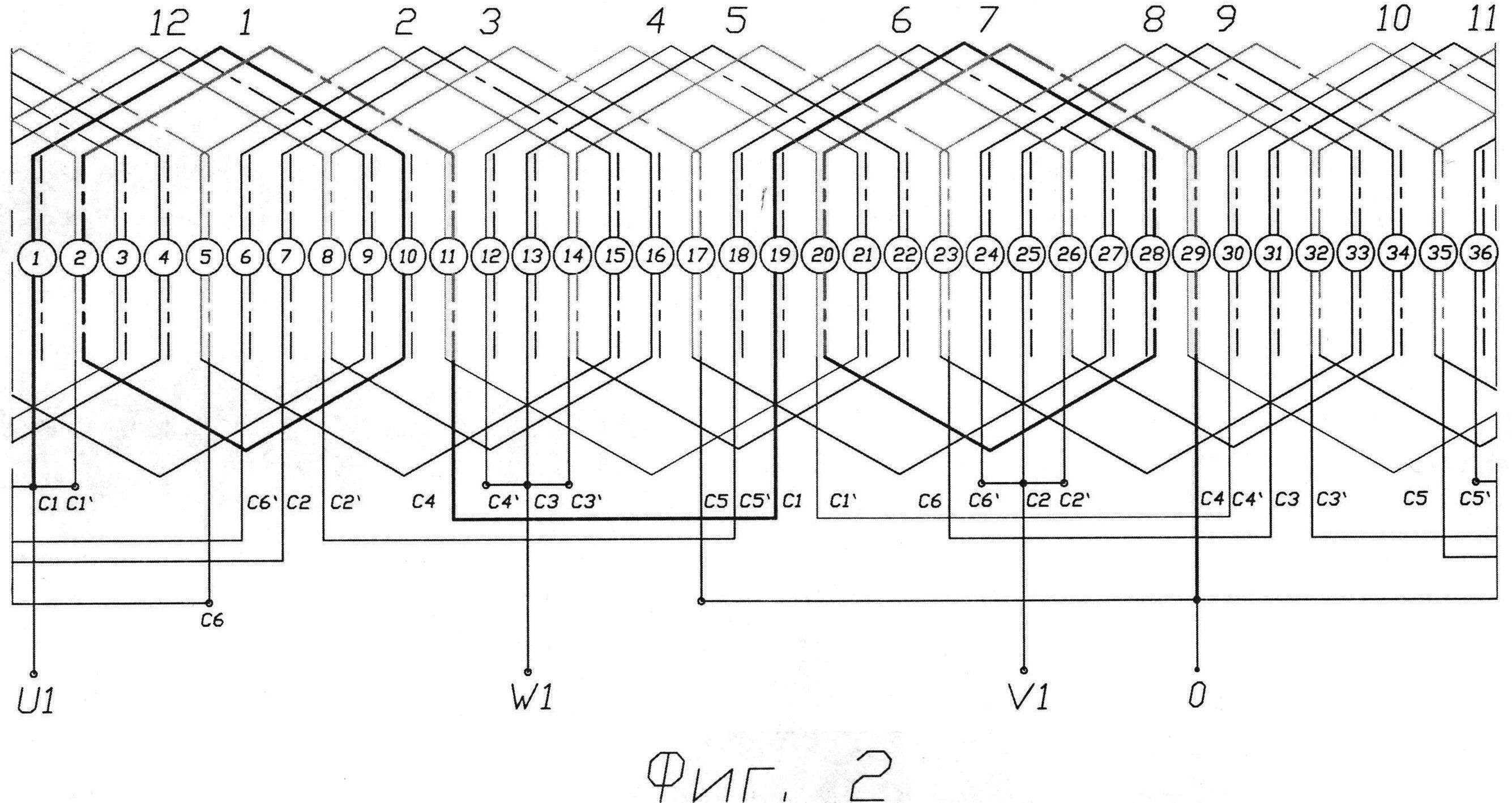 На рисунке 5.36 показаны две соседние катушки, вставленные в соответствующие пазы статора. Обратите внимание на более короткую длину этих катушек, потому что конечные витки короче, в то время как сегменты витков (проводников) в соответствующих пазах статора остаются той же длины. Чем короче длина конечного витка (который не создает крутящий момент), тем лучше конструкция двигателя.
На рисунке 5.36 показаны две соседние катушки, вставленные в соответствующие пазы статора. Обратите внимание на более короткую длину этих катушек, потому что конечные витки короче, в то время как сегменты витков (проводников) в соответствующих пазах статора остаются той же длины. Чем короче длина конечного витка (который не создает крутящий момент), тем лучше конструкция двигателя.
Обмотка с переменным шагом была разработана для уменьшения высоты концевых витков статора, вызванной многочисленными пересечениями смежных катушек, путем вложения катушек друг в друга, как показано на рис.5.37. Этот шаблон можно использовать только тогда, когда количество катушек на фазу на полюс n равно 2 или больше. На рисунке 5.37 показано состояние n = 3. Фактическая схема намотки показана на рисунке 5.38. Поскольку n = 2, будут две разные длины обмотки или
РИСУНОК 5.35 Схема намотки 4-полюсного статора с 12 пазами постоянного шага, трехфазное соединение, 30 ° механический, 60 ° электрический.
РИСУНОК 5.36 Схема намотки 4-полюсной обмотки с постоянным шагом внахлест с расположением смежной катушки.
бросок.Следующее уравнение описывает метод, используемый для определения двух переменных шагов обмотки:
VSP1 = 7 и VSP2 = 5. Среднее значение этих двух катушек с переменным шагом должно равняться интегральному шагу обмотки для 3-фазного 2-полюсного 12- пазовая конструкция — 6. На рис. 5.39 показано расположение двух соседних катушек, помещенных в соответствующие пазы статора. Такая схема намотки уменьшит высоту конечных витков и длину катушки на 10–15 процентов. Концентрическая обмотка с переменным шагом широко используется в более крупных агрегатах с интегральной мощностью, особенно в различных мастерских по ремонту электрических обмоток.
РИСУНОК 5.37 Вид сбоку концентрической намотки с переменным шагом.
РИСУНОК 5.38 Концентрическая схема намотки с переменным шагом, 2 полюса, трехфазное последовательное соединение.
РИСУНОК 5.39 2-полюсная 3-фазная концентрическая диаграмма переменного шага.
Третья схема обмотки — это обмотка с частичным шагом, которая используется во многих приложениях, особенно в пазах статора, где необходимо уменьшить крутящий момент зубчатого зацепления. Таблица 5.7 определяет дробный шаг как 1% для 15-контактной 4-полюсной конфигурации. Эта схема популярна для обмоток резольвера и некоторых двигателей BLDC с низким зубчатым колесом. Следующее уравнение дает шаг:
Уравнение (5.5) определяет шаг или ход намотки как 3 или 4. Для схемы, показанной на рис. 5.40, выбрано три. Начальные точки для катушек должны соответствовать схеме размещения катушек. показано. Эта схема размещает две смежные катушки стратегически и на равном расстоянии вокруг статора, причем каждая из трех фаз имеет один набор из двух смежных катушек и три набора одиночных катушек (схема из Veinott and Martin, 1987).
РИСУНОК 5.40 Последовательное 4-полюсное трехфазное соединение с постоянным дробным шагом и нечетным пазом.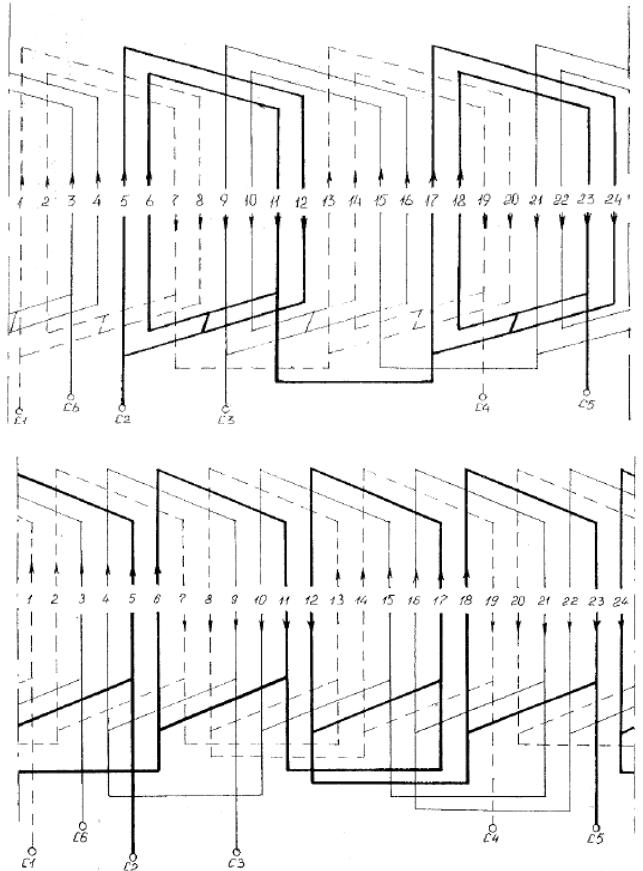 Рекомендуемые группы катушек: 2-1-1-1-2-1-1-1-2-1-1-1 = 15.
Рекомендуемые группы катушек: 2-1-1-1-2-1-1-1-2-1-1-1 = 15.
Как и у любой обмотки, есть преимущества, уравновешенные недостатками. Следующее уравнение определяет шаг зуба или паза статора с 15 пазами.
Теперь, поскольку эта конструкция представляет собой четырехполюсную конструкцию BLDC, существует два полных электрических цикла для одного полного механического цикла. Следующее уравнение определяет соотношение между электрическими и механическими степенями для любой четырехполюсной конструкции.
Электрический градус = механический градус x количество пар полюсов
.-. Электрические градусы = 24 ° x 2 = 48 ° электрические (5.7)
Электрический угол наклона 48 ° не соответствует желаемому углу наклона 60 °, поэтому должна быть потеря крутящего момента.
На рис. 5.41 показана схема намотки 2-полюсной обмотки с частичным шагом с 12 пазами. Полный шаг намотки будет иметь значение 6 с шагом от 1 до 7. Эта схема намотки имеет шаг намотки 56 (дробный) или шаг намотки от 1 до 6. Эта группа витков с дробным шагом имеет шаг менее чем 1, когда используется четное количество пазов статора.Эта схема намотки используется в более крупных трехфазных двигателях переменного тока для уменьшения содержания гармоник как в напряжении, так и в формах сигналов mmf. Этот метод очень похож на технику обмоток с коротким шагом внахлестку, используемую в щеточных двигателях постоянного тока.
Эта группа витков с дробным шагом имеет шаг менее чем 1, когда используется четное количество пазов статора.Эта схема намотки используется в более крупных трехфазных двигателях переменного тока для уменьшения содержания гармоник как в напряжении, так и в формах сигналов mmf. Этот метод очень похож на технику обмоток с коротким шагом внахлестку, используемую в щеточных двигателях постоянного тока.
Последний тип намотки — это обмотка с половинным шагом, которая имеет простейшую схему намотки. Катушка намотана непосредственно на зуб статора с шагом намотки 1
РИСУНОК 5.41. Двухполюсное трехфазное последовательное соединение с постоянным дробным шагом и четным пазом.
и ход от 1 до 2. Он широко используется в шаговых и реактивных электродвигателях. Он также используется в двигателях PM BLDC, используемых в дисковых накопителях. Очень популярна восьмиполюсная обмотка с девятью пазами и шестиполюсная обмотка с девятью пазами. Коэффициент конечного витка (коэффициент длины катушки)
Коэффициент конечного витка (коэффициент длины катушки)
для 2-полюсного 3-фазного интегрального устройства с 12 гнездами — обмотка шага с 2 пазами на полюс на фазу.Вейнотт и Мартин (1987) разработали таблицу с коэффициентами распределения для каждой основной схемы намотки, приведенную в Таблице 5.8.
Таблица 5.9 содержит табличные результаты для значений Kp и Kd для шести представленных схем намотки плюс 24-контактная 4-полюсная схема намотки с интегральным шагом, показанная
на рис. 5.42.
| слотов на полюс на фазу, | 3 фазы | ||
| или катушек на группу | 2 фазы | Обычный | Последовательный полюс |
| 1 | 1.000 | 1.000 | 1.000 |
| 2 | 0,924 | 0,966 | 0,866 |
| 3 | 0,911 | 0,960 | 0,844 |
| 4 | 0,906 | 0,958 | 0,837 |
| 5 | 0,904 | 0,957 | 0,833 |
| 6 | 0,903 | 0,956 | 0,831 |
| CO | 0. 900 900 | 0,955 | 8,270 |
| 1/2 | 0,911 | 0,960 | 0,844 |
| Все прочие дробные | 0,900 | 0,955 | 0,827 |
| пазовые обмотки |
| Слот | слотов на | ||||||||
| Статор | Обмотка | Обмотка | Обмотка | Шаг, | полюс по | ||||
| слотов | Поляки | тип | шаг | бросок | ° механический | фаза n | Kp | кдкп | |
| 12 | 2 | Интегральный | 1 | 1-7 | 30 | 2 | 0.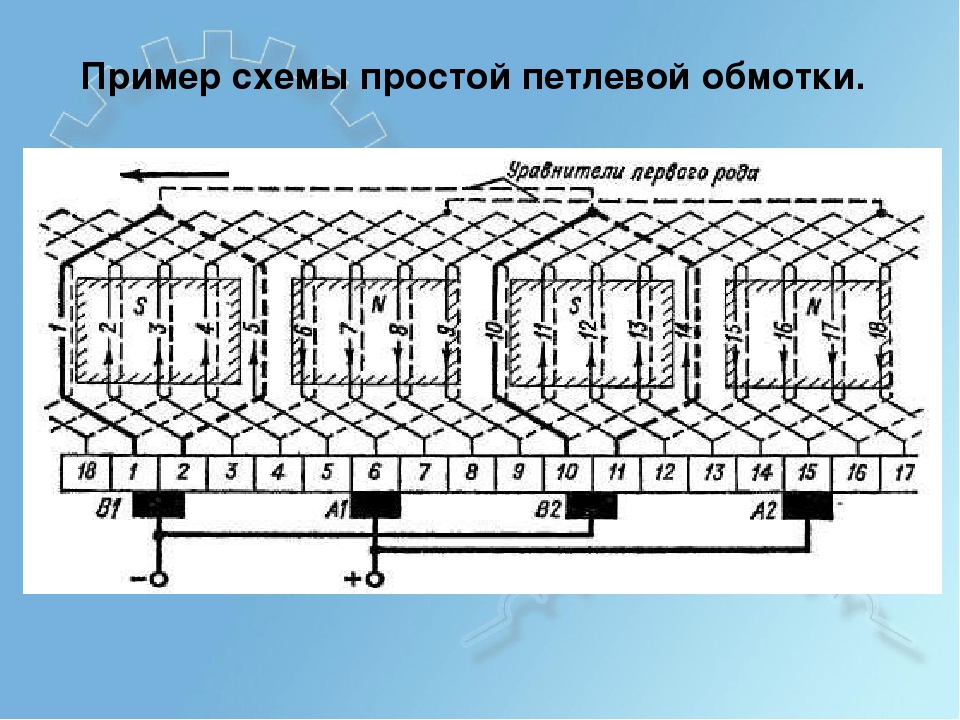 966 966 | 1.000 | 0,966 |
| 12 | 4 | Интегральный | 1 | 1-4 | 30 | 1 | 1.000 | 1.000 | 1.000 |
| 12 | 2 | переменная | 1 (средний) | 1-8 / 1-6 | 30 | 2 | 0,966 | 1.000 | 0,966 |
| 15 | 4 | Дробное | 1/4 | 1-4 | 24 | 1 | 1.000 | 0,924 | 0,924 |
| 12 | 2 | Дробное | * 8 | 1-6 | 30 | 1 | 1.000 | 0,966 | 0,966 |
| 9 | 8 | Полу-шаг | 1> 8 | 1-2 | 40 | 1 | 1.000 | 0,985 | 0,985 |
| 24 | 4 | Интегральный | 1 | 1-7 | 15 | 2 | 0. 966 966 | 1.000 | 0,966 |
Заполнение пазов статора. Первым делом при заполнении паза статора является вычисление площади паза. Существует много типов пазов статора, но трапециевидный паз (с постоянной шириной зуба), показанный на рис. 5.30, и круглый паз (с переменной шириной зуба) являются наиболее популярными формами паза. Можно использовать базовую тригонометрию для определения площади прорези или получить фактическую площадь прорези от поставщика ламинирования.
Есть три метода, используемых для вычисления площади щели и общего объема используемой медной магнитной проволоки.В них используются следующие единицы измерения:
• Квадратные дюймы (дюйм2)
• Квадратные милы (мил2)
• Круглые милы (смил)
В методе круговых милов используется номинальный диаметр изолированного провода в милах или тысячных долях дюйма. квадрат этого диаметра, который является значением кругового мил.
Площадь, см = (номинальный диаметр, мил) 2 (5,10)
Для 18 AWG (American Wire Gauge) номинальный диаметр изолированного одиночного провода из таблицы магнитных проводов Phelps Dodge (Таблица 2.76) составляет 41,8 мил.
РИСУНОК 5.42 24 паза статора, 4 полюса, 3-фазные соединения 30 ° механический, 60 ° электрический.
площадь провода составляет 1747 см / кв. (5.10). Значение квадратного мил меньше и может быть вычислено, изменив формулу. (5.10) к уравнению. (5.11). Во многих случаях схемы проводов рассчитывают номинальный диаметр магнитного провода без изоляционного покрытия (диаметр неизолированного провода). Настоятельно рекомендуется использовать изолированные провода.
Схема магнитных проводов Phelps Dodge (Таблица 2.76) также показывает количество проводов на квадратный дюйм. Более важный параметр — количество витков (проводников) на квадратный дюйм. Он дает значение общего числа витков или, что более уместно, проводов, которые могут быть помещены в прорезь при условии 100-процентного заполнения. Теперь, наибольшее количество медного наполнения с точки зрения процента фактических витков на квадратный дюйм по сравнению со 100-процентным заполнением витков на квадратный дюйм, которое автор фактически сделал с помощью методов ручной вставки, составляет 73 процента с 37 AWG и 63 процента с 21 AWG.
Практический предел составляет где-то от 40 до 50 процентов от этого теоретического значения в зависимости от типа намоточного станка, инструментов, используемых на намоточном станке, длины пакета статора, размера паза статора и т. Д.Если бы кто-то хотел использовать 22 AWG, количество витков (проводников) на линейный дюйм было бы 37,5, а витков (проводников) на квадратный дюйм было бы 1410.
Общее количество проводников (теоретическое) = (SA) (виток / дюйм2) Общее количество проводников ( теоретический) = 0,2192 x 1410 = 309 (5,12)
, где SA = площадь паза
Общее количество проводников должно быть четным, поскольку 2 проводника равны 1 витку. Здесь максимальное значение составляет 308 проводников с магнитопроводом 22 AWG. Это будет 308/2 или 154 витка, так как две катушки представлены в каждом пазу статора.При практическом заполнении пазов на 45 процентов максимальное количество витков, вероятно, составит 69,3 или 69 витков на катушку. Фактическое количество витков для достижения желаемых характеристик еще не определено, но для выбранного размера AWG 69 витков или 138 проводов являются максимальным практическим пределом.
Следующим важным параметром, который необходимо установить, является сопротивление катушки. Во-первых, необходимо установить МЛТ в обмотке статора.
Значение MLT преобразуется в количество оборотов на фут для определения единиц измерения, а значение Ом на фут для 22 AWG равно 0.162 Q.
Расчеты обмотки статора. Для определения общей производительности двигателя необходимо вычислить два основных рабочих параметра двигателя. Это постоянная крутящего момента Kt и фазное сопротивление Rphase. По этим двум параметрам можно определить все характеристики двигателя.
Значение Kt выводится для случая среднеквадратичного крутящего момента на основе трапецеидального крутящего момента в зависимости от профиля положения и почти идеальной коммутации. Для достижения разумного значения среднеквадратичного крутящего момента предусмотрена регулировка на 10 процентов.При необходимости это значение можно отрегулировать на основе реальных кривых крутящего момента.
Следующее уравнение вычисляет значение Kt для каждой фазы, как описано.
Специальная обработка катушек статора с намоткой, катушек якоря, катушек постоянного тока и специальных катушек
Амперы — Единица электрического тока, скорость потока электронов. Один вольт на сопротивлении 1 Ом вызывает протекание тока силой 1 ампер.
Якорь — Подвижный элемент в электромеханическом устройстве.
AWG — Американский калибр проволоки.
Chorded Winding — Обмотка с размахом менее полного шага.
Цепи — Количество проводников, соединенных вместе с целью проведения электрического тока. Количество путей, по которым ток может протекать от одного конца фазы.
Круглый мил на Ампер — Площадь поперечного сечения проводника, деленная на силу тока (в амперах) в проводнике.
Изоляция класса B — система изоляции , оцененная NEMA для максимальной рабочей температуры 130 ° C
Изоляция класса F — система изоляции , оцененная NEMA для максимальной рабочей температуры 155 ° C
Изоляция класса H — система изоляции , оцененная NEMA для максимальной рабочей температуры 180 ° C
Катушка — витков провода, используемого для создания магнитного потока или для механической реакции на изменение магнитного потока.
Длина прямого участка дна катушки — Расстояние прямой части катушки, которая находится в нижней части прорези, от точки, где катушка начинает поворачиваться к суставу, до точки, где катушка начинает поворачиваться к суставу за другой конец сердечника статора.
Коэффициент хорды катушки — Отношение эффективных витков катушки к фактическим виткам. Коэффициент хорды = Sin (90 x зубьев на ширину / {пазов / полюс})
Удлинитель конца соединения катушки — Расстояние от железа статора до внешнего края поворотного кулака катушки на стороне соединительного вывода катушки.
Группа катушек — Катушки, составляющие один полюс одной фазы (количество групп = фазы x полюса).
Большая капля катушки — Расстояние, перпендикулярное длине сердечника, между отверстием и нижним концом удлинителя катушки, где кулак катушки начинает принимать форму.
Удлинитель противоположного конца катушки — Расстояние от железа статора до внешнего края поворотного кулака на стороне катушки, которая не имеет выводов.
Малая капля катушки — Расстояние (величина зазора) перпендикулярно длине сердечника и между отверстием и верхним концом удлинителя катушки, где кулак катушки начинает принимать форму.
Длина хода катушки (шаг или интервал) — Количество прорезей, охватываемых катушкой, считая от нижней стороны катушки до верхней стороны катушки и включая прорези, которые фактически удерживают нижнюю и верхнюю стороны катушки.
Прямая длина верхней части катушки — Расстояние прямой секции катушки, которая находится в верхней части прорези чуть ниже клина, от точки, где катушка начинает поворачиваться к суставу, до точки, где катушка начинает поворачиваться к суставу за другим концом сердечника статора.
Общая длина катушки — Общая длина катушки от внешнего края одного кулака до внешнего края противоположного кулака должна измеряться, пока все еще находится в сердечнике статора.
Concentric Winding — Обмотка, в которой каждая катушка в группе катушек имеет разный пролет.
Проводник — Проволока или комбинация проводов, не изолированные друг от друга, пригодные для передачи электрического тока путем переноса орбитальных электронов.
Соединение — Точка соединения двух или более компонентов таким образом, чтобы между ними могла происходить проводимость.
Core Back Iron — Расстояние между дном паза сердечника и внешним диаметром магнитного (стального) сердечника (рядом с рамой).
Диаметр отверстия сердечника — Внутренний диаметр стального сердечника статора. Расстояние от любой точки на внутренней кромке паяльника статора до диаметрально противоположной точки (180 ° по внутренней стороне отверстия).
Длина сердечника — Длина сердечника магнитного (стального) двигателя. Длина утюга с вентиляционными отверстиями, но без пальцевых пластин.
Глубина прорези сердечника под клином — Глубина прорези под клином, имеется пространство для нижнего змеевика, верхнего змеевика и наполнителей.
Ширина паза сердечника — Расстояние паза, измеренное между одним зубом сердечника и следующим соседним зубом сердечника.
Corona — Электрический разряд из-за ионизации воздуха, возникающий на поверхности проводника, когда градиент потенциала превышает определенное значение.
Защита от коронного разряда — Проводящая лента или токопроводящая краска, предназначенная для выравнивания напряжения между железным сердечником и катушкой, таким образом предотвращая возникновение коронного разряда.
Ток — Движение электронов по проводнику, измеряется в амперах.
Соединение треугольником — Соединение трехфазной обмотки, при котором фазы соединены последовательно, образуя замкнутую цепь. Треугольное клеммное соединение в трехфазной системе.Трехфазная обмотка, в которой каждый конец одной фазы соединен с концом другой фазы.
Обмотка по краю — Катушка намотана на край (по ширине) проводника прямоугольной формы, а не на плоскую сторону (по толщине) проводника прямоугольной формы. Проводник обычно ленточный (очень широкий по сравнению с его толщиной).
Пальцевые пластины — Пластины из тяжелого металла, которые оказывают давление на пластины статора.
Катушка с формованной обмоткой — Катушка, намотанная и имеющая форму перед помещением в статор или якорь двигателя или генератора.
Частота (f) — Количество полных циклов за одну секунду переменного тока или волн напряжения, выраженное в герцах.
Герц (Гц) — Единица частоты, равная одному циклу в секунду.
Мощность в лошадиных силах (л.с.) — Единица мощности или мощность механизма для выполнения работы. Одна лошадиная сила равна 746 Вт.
Киловольт-ампер (кВА) — Полная мощность в цепи переменного тока, имеющая реактивное сопротивление. Напряжение, умноженное на амперы, без учета фазы.
Киловатт (кВт) — Единица электрической мощности. Номинальная мощность двигателя. 1000 Вт.
Lap Winding — Обмотка, в которой все катушки имеют одинаковый диапазон.
Левая катушка — Если смотреть на сторону подключения катушки устройства, верхняя сторона катушки находится слева от вас.
Магнитная индукция — Также называется плотностью магнитного потока.Поток на единицу площади, перпендикулярный направлению потока.
Двигатель — Вращающаяся машина, преобразующая электрическую энергию в механическую.
Фаза (Φ) — Количество отдельных волн напряжения в источнике переменного тока.
Катушка с правой стороны — Если смотреть на сторону подключения катушки устройства, то верхняя сторона катушки находится справа от вас.
об / мин — оборотов в минуту.
Ротор — Вращающийся элемент любого двигателя или генератора.
RTD — Температурный датчик сопротивления.
Паз с перекосом — Пазы сердечника не параллельны валу.
Статор — Стационарная часть вращающейся электрической машины.
Опорное кольцо — Кольцо, предназначенное для механической поддержки удлинителей катушки.
Общая (общая) глубина паза керна — Расстояние от верха зуба керна до дна паза.
Общее количество параллельных проводов (количество проводов в руке) — Общее количество жил проводов на каждый виток катушки, провода выведены вместе в один вывод катушки.
Transposition — Переворачивание проводника в одном или нескольких местах, как правило, в концевой части катушки. Перестановка снижает потери и тепло из-за циркулирующих токов, которые приводят к неравномерному распределению тока в проводнике.
витков на катушку — Количество раз, когда проводник закручивается в катушку. (Провода в сечении / провода параллельно {в руке}).
Напряжение — (Э) электродвижущая сила. Эффективная разность потенциалов между любыми двумя проводниками.Электрическое давление между двумя точками. Сила, которая заставляет ток течь через электрический проводник.
Ватт (Вт) — Единица электроэнергии, необходимая для выполнения работы со скоростью 1 джоуль в секунду. В 1 лошадиных силах 746 Вт.
Обмотка — Проводящий путь, индуктивно связанный с магнитопроводом.
Соединение WYE — Соединение обмотки Y-образной формы также называется соединением звездой. Трехфазная обмотка, в которой один конец каждой фазы соединен вместе, образуя «звезду».Остальные концы подключены к источнику питания.
Реализовать векторную модель индукционного генератора с короткозамкнутым ротором, приводимого в действие переменным шагом. ветряная турбина
Когда выбран этот параметр, вкладка Turbine не отображается в диалоговое окно маски, и вход Simulink ® с именем Tm появляется на блоке, позволяя использовать внешний сигнал для входной механический крутящий момент генератора.Этот внешний крутящий момент должен быть в о.у. на основе номинальная электрическая мощность и синхронная частота вращения генератора. Например, внешний крутящий момент может исходить от модели турбины, определенной пользователем. По соглашению для индукционной машины крутящий момент должен быть отрицательным для выработки электроэнергии. По умолчанию очищено.
Номинальная мощность в ВА, номинальное линейное напряжение в среднеквадратичном и номинальное
системная частота в герцах.По умолчанию [1.5e6 / 0.9, 575, 60] .
Сопротивление статора Rs и индуктивность рассеяния Lls в о.е. в зависимости от генератора
рейтинги. По умолчанию [0,004843, 0,1248] .
Сопротивление ротора Rr ‘и индуктивность рассеяния Llr’, относящиеся к статору, в
пу на основе номиналов генератора. По умолчанию [0,004377, 0,1791] .
Индуктивность намагничивания Lm в о.е., основанная на номинальных характеристиках генератора. По умолчанию 6,77 .
Комбинированная константа инерции генератора и турбины H в секундах, комбинированное вязкое трение
коэффициент F в pu в зависимости от номинальных характеристик генератора и количества пар полюсов p. По умолчанию [5.04, 0.01, 3] .
Возможно, вам потребуется использовать вашу собственную модель турбины, например, чтобы реализовать различные силовые характеристики или реализовать жесткость вала. Ваша модель должна тогда вывести механический крутящий момент, приложенный к валу генератора. Если инерция и трение коэффициент турбины реализуются внутри модели турбины, вы указываете только постоянная инерции генератора H и коэффициент трения генератора F.
Начальное скольжение s, электрический угол Θ в градусах, величина тока статора в о.е. и
фазовый угол в градусах.По умолчанию [-0.01,0, 0,0,0, 0,0,0] .
Статор и обмотка катушки | электрооборудование
Статор и обмотка катушки
Запись данных — один из наиболее важных шагов при перемотке статора или катушки. Он состоит в том, чтобы зафиксировать определенную конкретную информацию о старой обмотке, чтобы не возникло затруднений при перемотке статора или катушки. Перед зачисткой записывается как можно больше информации, а остальная информация записывается во время операции зачистки.Еще один важный момент — это расстояние, на которое катушки выступают из статора. Это называется конечной комнатой. Важно, чтобы новые катушки не выходили за пазы дальше этого расстояния. Если они это сделают, то концевые раструбы могут прижаться к катушкам, вызывая короткое замыкание, или концевые раструбы вообще не удастся заменить. Форма для записи данных для двигателя с расщепленной фазой показана на рис. 1, а способы записи данных о шаге катушек на форме показаны на рис. 2. Форма для записи данных для отталкивающего двигателя показана на рис.3, а типовые схемы размещения для записи данных в эту форму показаны на рис. 4. Форма для записи данных для многофазного двигателя показана на рис. 5. Информация, указанная выше, должна быть записана таким образом, чтобы дать возможность любому мастеру по ремонту электродвигателей перемотать электродвигатель или генератор.
СБОР ДАННЫХ ВО ВРЕМЯ ИЗВЛЕЧЕНИЯНельзя преуменьшать важность наблюдения и записи данных во время процедуры зачистки. Следующие ниже методы и процедуры помогут в наблюдении и регистрации важных деталей после того, как будут записаны все предварительные данные.
Двухфазные статорыИногда необходимо заменить только пусковую обмотку. Если при снятии пусковой обмотки проявить осторожность, остальная часть статора не потребует перемотки. Однофазные двигатели с более чем четырьмя полюсами — редкость, но если встречается двигатель с шестью или восемью полюсами, обязательно запишите количество полюсов для пусковой обмотки (перед снятием изоляции), поскольку они во многих случаях будут отличаться от что бегущей обмотки.Следуйте процедурам, описанным ниже, как для пусковой, так и для бегущей обмотки.
1. Удалите все клинья. Используйте приспособление для снятия клина или кусок ножовки со сточенным зубчатым венцом, рис. 6.
2. Прорежьте концевые витки обмоток одного полюса с одной стороны.
Подсчитайте и запишите количество проводов, входящих в прорези для каждой стороны катушки одной стороны полюса. Расположение обмотки
паза сердечника полюса по отношению к раме должны быть отмечены штамповкой в центральном пазе или пазах каждого полюса.Во многих однофазных сердечниках статора центр каждого главного полюса определяется изменением размера паза. Этого достаточно для правильной установки полюсов при перемотке.
Зачистите статор с помощью пары плоскогубцев со стороны 1. статора, на котором не обрезаны полюсные обмотки, рис. 6. Если трудно снять обмотки, выполните процедуры для применения тепла или щелочи. следует соблюдать содовый раствор. Также обмотки могут быть подключены через полную линию тока.Это приводит к их перегреву и выгоранию лаков и изоляционных материалов, которые там отслаиваются.
Статоры отталкивающего типа
Выполните ту же процедуру, что и для статоров с расщепленной фазой, описанных выше.
Полифазные статоры
Перед снятием изоляции с многофазного статора важно проверить и записать цепи обмотки конкретного перематываемого блока. Использование схем подключения, приведенных в приложении, помогает в этом отношении.После регистрации схем обмотки статора и предварительных данных мастер по ремонту электродвигателя может приступить к зачистке статора в соответствии с процедурой, описанной для электродвигателей с расщепленной фазой. Форма для записи данных многофазного двигателя показана на рис. 5.
ПРОЦЕДУРА ПЕРЕМОТКИ
Процедура изоляции пазов аналогична той, что используется для якоря. Может потребоваться отрезать и подогнать оптоволокно 1 I 16 дюймов (1,6 мм) к концам сердечника и выполнить процедуры, описанные в разделе «Изоляция концов сердечника и вала» в главе 15.Используйте процедуры, описанные в шагах с 1 и 3 по 6. Статор поддерживается на настольном блоке, собственной стойке или стойке якоря, снабженной адаптерами статора.
ФОРМИРОВАНИЕ КАТУШКИ
Большинство однофазных статоров имеют ручной завод. В очень немногих случаях можно найти однофазный статор, который состоит из предварительно сформованных катушек, а затем, в большинстве случаев, они размещаются, как описано в разделе «Многофазные статоры». Ниже перечислены различные методы перемотки однофазных статоров.
1. Ручной завод. Ручной завод может использоваться как для пусковой, так и для ходовой обмоток. В этом методе провода помещаются в пазы, по одному витку за раз, до тех пор, пока операция намотки не будет завершена, рис. 7. Когда статор все еще поддерживается после завершения изоляции, действуйте следующим образом:
а. Установите катушку с проволокой подходящего размера для статора на стойке для катушек с подходящим натяжным устройством.
г. Вставьте провод в прорезь для начала внутренней катушки, рис.8.
г. Намотайте в паз с правильным шагом катушки для внутренней обмотки в соответствии с записанными данными.
г. Переходите к следующей катушке большего размера.
e. Продолжайте переходить к следующей катушке большего размера, пока весь полюс не будет готов. Деревянные дюбели могут быть вставлены в пустые пазы для удержания катушек в нужном положении во время наматывания, рис. 9.
ф. Обрежьте провод и заклините обмотку на место, если это верхняя обмотка.
г. Если это нижняя обмотка, вставьте временные незакрепленные деревянные или фибровые клинья на место для каждого паза, пока статор не будет готов.
ч. Снимите дюбели.
я. Продолжайте b и h выше для каждого полюса до тех пор, пока не будет намотана нижняя обмотка статора или, если обмотка верхняя, статор намотан полностью.
Дж. Установите катушку с проволокой нужного размера для пусковой обмотки.
к. Перемотайте пусковую (концевую) обмотку (после удаления временных клиньев) так же, как и рабочую (нижнюю) обмотку, убедившись, что каждый полюс намотан на 45 градусов относительно рабочей обмотки для четырехполюсного статора и на 90 градусов. отдельно для двухполюсного статора.
1. Плотно заклиньте обмотки.
2. Формовочная обмотка. Проверьте рис. 10 и 11. См. Формную обмотку в главе 15.
3. Обмотка мотка. Проверьте рис. 12 и 13. См. Также главу 15 для машинной и формной намотки катушек и их размещения.
Полифазные статоры
Большинство многофазных двигателей с дробной мощностью представляют собой ромбовидные катушки с кашицеобразной обмоткой, расположенные внахлест. Обычно катушек столько же, сколько и прорезей, или, другими словами, две стороны катушки на прорезь, образуя так называемую двухслойную обмотку.Все катушки идентичны по количеству витков и размеру провода, а фазные катушки обычно разделены полосой изоляции (фазовая катушка — это катушка, смежная с катушкой другой фазы). Катушки намотаны или соединены группами.
Группа — это просто заданное количество отдельных катушек, соединенных последовательно, только с двумя выведенными выводами. Затем из этих групп подключается обмотка статора. При намотке внахлест якоря все катушки соединены последовательно, и образуется замкнутая обмотка.В многофазных статорах и роторах катушки соединены в несколько групп.
1. Катушки для малых статоров. В намотанных катушках, используемых в двигателях с дробной мощностью, довольно распространенной практикой является наматывание всех катушек одной группы из непрерывной проволоки, если во всех группах одинаковое количество катушек. Это упрощает окончательные соединения статора или ротора с обмоткой. Однако, если количество катушек не одинаково во всех группах, может быть проще выводить выводы для каждой отдельной катушки и соединять их группами после намотки статора.
2. Катушки для статоров средних размеров, (рис. 14). Выполните ту же процедуру, что и на шаге 1.
3. Катушки для статоров больших размеров. Катушки для статоров с открытым пазом требуют особой формы и должны быть намотаны, чтобы соответствовать форме паза. Их стороны должны быть полностью прямоугольными. Такие катушки полностью заклеены.
ИЗОЛЯЦИОННЫЕ КАТУШКИ
Процедура изоляции катушек для различных применений приведена в главе 15 раздела «Изоляционные катушки».
Входящие поисковые запросы:
Заявка на патент США для заявки на патент РАСПРЕДЕЛЕННОГО СТАТОРА (Заявка № 20200028417, выданная 23 января 2020 г.)
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИВ данной заявке испрашивается приоритет предварительной заявки США № 62/625 232, поданной 1 февраля 2018 г., раскрытие которой включено в настоящий документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИПримерные варианты осуществления относятся к области электрических машин и, более конкретно, к электрической машине, имеющей распределенную обмотку.
Статор электродвигателя или генератора состоит из двух частей и изоляционного материала. Первая часть — это ламинация. Ламинирование обычно формируется из ламинированных листов электротехнической стали, которые формуются (штампуются, прокатываются или сгибаются) в кольцевую форму, имеющую внутренний диаметр, внешний диаметр и высоту стопки. Ламинирование дополнительно включает прорези, открытые для внутреннего или внешнего диаметра. Прорези имеют ширину и глубину. Между каждым пазом находится ламинированный зуб, который выступает от задней части ламинированного железа (ярма) по внутреннему или внешнему диаметру.
Вторая часть — обмотка. Обмотка обычно состоит из изолированного медного провода. Однако следует понимать, что могут использоваться другие проводящие материалы, такие как алюминий. Обмотка включает несколько фаз — обычно 3, 5 или 6. Количество фаз может варьироваться. Для каждой фазы обмотка включает в себя проводники, имеющие щелевые сегменты и концевые петли. Сегменты прорези размещаются в прорезях для ламинирования. Концевые петли проходят в основном по окружности и соединяют вместе два сегмента паза.Обмотка может быть треугольной или звездообразной.
Распределенная обмотка — это обмотка, у которой есть полюсы одной фазы, которые включают более одного паза, обычно смежные пазы. Например, в трехфазной обмотке сегменты паза, связанные с фазой U, размещаются в пазах 1 и 2 ; сегменты слота, связанные с фазой V, размещаются в слотах 3 и 4 ; а сегменты слотов, связанные с фазой W, размещены в слотах 5 и 6 .Сегменты слота, связанные с фазой U, снова размещаются в слотах 7 и 8 и так далее. Обмотка с коротким шагом или обмотка со сдвигом фазы будет иметь каждый полюс каждой фазы, имеющий определенные пазы, в которых размещаются сегменты пазов на одной фазе и сегменты пазов другой фазы.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯРаскрывается способ формирования статора для электрической машины, включающий формирование первого проводника во множество изгибов, имеющих первый шаг намотки, формирование второго проводника во множество изгибов, имеющих первую обмотку. шаг, создавая слой обмотки статора путем введения первого проводника и второго проводника в первый полюс статора, имеющего зону пересечения первой концевой петли.Второй проводник находится поверх первого проводника в зоне пересечения первой концевой петли. Шаг намотки первого проводника изменяется на второй шаг намотки, который отличается от первого шага намотки, а шаг намотки второго проводника изменяется на третий шаг намотки, который отличается от первого шага намотки и второй обмотки. подача. Способ дополнительно включает переплетение первого проводника относительно второго проводника между первым полюсом и вторым полюсом статора и введение первого проводника и второго проводника во второй полюс статора, имеющего зону пересечения второй концевой петли, при этом первый проводник находится поверх второго проводника в зоне пересечения второй концевой петли.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙСледующие ниже описания никоим образом не следует рассматривать как ограничивающие. Со ссылкой на прилагаемые чертежи одинаковые элементы пронумерованы одинаково:
ФИГ. 1 изображает частичный вид статора электрической машины, включающей распределенную обмотку, в соответствии с аспектом примерного варианта осуществления;
РИС. 2 a изображает первую часть диаграммы, иллюстрирующей рецепт намотки для восьми (8) проводников распределенной обмотки по фиг.1, в соответствии с примерным вариантом осуществления;
РИС. 2 b изображает вторую часть диаграммы, иллюстрирующей рецепт намотки для восьми (8) проводников распределенной обмотки по фиг. 1, в соответствии с примерным вариантом осуществления;
РИС. 3 a изображен проводник распределенной обмотки по фиг. 1, в соответствии с аспектом примерного варианта осуществления;
РИС. 3 b изображает другой проводник распределенной обмотки по фиг.1, в соответствии с аспектом примерного варианта осуществления; и
фиг. 4 изображает переплетение первого проводника со вторым проводником в зоне пересечения концевой петли статора на фиг. 1, в соответствии с аспектом примерного варианта осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯПодробное описание одного или нескольких вариантов осуществления раскрытого устройства и способа представлено здесь в качестве примеров, а не ограничения со ссылкой на чертежи.
Статор электрической машины обычно обозначен как 10 на фиг. 1. Статор 10 включает в себя корпус 14 статора, имеющий внешнюю поверхность 17 , определяющую внешний диаметр (OD), и внутреннюю поверхность 19 , определяющую внутренний диаметр (ID). Статор 10, включает в себя множество пазов, обозначенных, как правило, номером 22 , определенных радиально выступающими внутрь зубьями, обозначенными, как правило, номером 24 . Пазы статора 22 определяют множество полюсов 28 a — 28 l .Количество полюсов может быть разным.
По меньшей мере, одна фазная обмотка, включающая в себя множество проводников 31 , расположена на каждом полюсе 28 a — 28 l . Количество фазных обмоток, поддерживаемых статором 10 , может варьироваться. Кроме того, количество проводников для каждой фазы также может варьироваться. В показанном варианте статор 10, включает восемь (8) проводов для конкретной фазной обмотки. Проводник A, проводник B, проводник C, проводник D, проводник E, проводник F, проводник G и проводник H.ИНЖИР. 2 a и ФИГ. 2 b изображено примерное расположение сегментов паза для одной фазы, определяемых проводниками A-H в выбранных пазах 22 , чтобы определить шестнадцать (16) полюсов статора 10 в соответствии с примерным вариантом осуществления.
Слои показаны как 1 — 8 , причем слой 1 является самым внешним радиальным слоем, а слой 8 является самым внутренним радиальным слоем. Не показано на фиг. 2 — концевые петли, которые соединяют один сегмент прорези с другим сегментом прорези той же буквы на соседнем полюсе.Например, концевая петля соединяет сегмент паза проводника A полюса 28 j с сегментом паза проводника A в том же слое полюса 28 k . Проводники второй фазы (отдельно не обозначены) и третьей фазы (также отдельно не обозначены) такие же, как проводники A-H первой фазы. Проводники второй фазы на фиг. 2 будет вставлен в пустые щели, сдвинутые на две щели от проводников первой фазы и проводов третьей фазы на фиг.2 будет вставлен в пустые щели, сдвинутые на четыре щели слева от проводов первой фазы.
Продолжая ссылаться на фиг. 2, проводник A начинается как проводник в полюсе 28 p и проходит через паз статора 1 как сегмент паза в слое 1 полюса 28 p . Концевая петля (не показана), имеющая шаг N, проходит от сегмента прорези в прорези 1 вправо и соединяется с сегментом прорези проводника A, находящимся в слое 1 прорези 7 полюса 28 а .Другая концевая петля (также не показана), имеющая шаг N (не показана), проходит от сегмента слота в прорези 7 вправо и соединяется с сегментом прорези проводника A, находящегося в слое 1 прорези 13 из полюс 28 б . Проводник B начинается как вывод в полюсе 28 p и проходит через паз статора 2 как сегмент паза в слое 1 полюса 28 p (паз 2 ).Концевая петля, имеющая шаг 6 или N (не показана), проходит от сегмента прорези в прорези 2 вправо и соединяется с сегментом прорези проводника B, находящегося в слое 1 прорези 8 полюса 28 а . Другая концевая петля, имеющая шаг N (не показана), проходит от сегмента прорези в прорези 8 вправо и соединяется с сегментом прорези проводника B, находящегося в слое 1 прорези 14 полюса 28 б.
Этот рисунок проводника A, находящегося в слое 1 прорези N, и проводника B, находящегося в слое 1 прорези N + 1, соединенных концевыми петлями с шагом N, продолжается вверх через полюс 28 h . От полюса 28 p до полюса 28 g сегменты паза проводника A находятся слева от сегментов паза проводника B, а проводник B находится наверху проводника A в точках 30 и 31 (РИСУНОК.4). Наличие правого проводника (до этого момента, провод B) поверх левого проводника (до этого момента, провод A) упрощает сборку и позволяет концевым петлям лучше совмещаться.
Между полюсом 28 g и полюсом 28 h концевую петлю (не показана) для проводника A выходит из паза сегмента паза 43 слой 1 полюса 28 g в паз 50 , слой 1 полюса 28 h .Эта конечная петля имеет шаг семь или N + 1. Между полюсом 28 g и полюсом 28 h концевая петля (не показана) для проводника B выходит из паза сегмента 44 слой 1 полюса 28 g до паза 49 , слой 1 полюса 28 h . Эта конечная петля имеет шаг пять или N-1. Концевая петля N-1 проводника B и конечная петля N + 1 проводника A заставляет проводник A перескакивать с проводником B, и теперь для полюса 28 h сегмент паза проводника A находится в правом пазу и провод B находится в левом слоте.(Как лучше всего видно на фиг. 2, обмотка сдвинута по фазе, и 16 проводников одного полюса распределены по 1 полному пазу и двум половинным пазам. Следует понимать, что термины левый паз и правый паз относятся к правому пазу. и левый паз на слой — например, полюс 28 c ; левый паз для слоя 1 — это паз 19 , но левый паз уровня 5 — это паз 20 , а правый паз для слоя 1 — это слот 20 , а правый слот уровня 5 — это слот 21 ).По-прежнему желательно, чтобы концевые петли правильно входили в гнездо, и проводник, находящийся в левом пазу, должен находиться за проводником, находящимся в правом пазу опоры. Поскольку проводник B теперь находится в левом пазу, а проводник A находится в правом пазу для полюса 28 h , проводники A и B должны быть сплетены в этой точке, чтобы разместить провод B позади проводника A. Это лучше всего видно на фиг. 4, где проводник A находится за проводником B на полюсе 28 g , а провод B находится за проводником A на полюсе 28 h.
Рисунок концевых петель, соединяющих сегменты пазов проводника В в слое 1 левого паза и сегменты пазов проводника А в слое 1 правых пазов, продолжается от полюса 28 h вверх через полюс 28 л . От полюсов 28 м — 28 p концевые петли проводника A и проводника B продолжаются как концевые петли с шагом N, но концевые петли изгибаются внутрь, в результате чего сегменты пазов проводов A и B смещаются. спираль внутрь и находящаяся в слое 1 полюса 28 L к находящемуся в слое 2 полюса 28 м к находящемуся в слое 3 полюса 28 N, к находящемуся в слое 4 полюса 28 o до окончательного пребывания в слое 5 полюса 28 p.
Обертка проводников A и B в слое 5 продолжается от полюса 28 p до полюса 28 g , при этом сегмент паза проводника B находится в левом пазу, а провод A — в правом прорезь каждого полюса. Для этих полюсов 28 p к полюсу 28 g , сегменты паза проводника A и проводника B находятся в слое 5 , а проводник B остается позади проводника A. Между полюсами 28 g и полюс 28 h , концевая петля (не показана) для проводника B соединяет сегмент прорези в прорези 44 слоя 5 стойки 28 g с сегментом прорези в прорези 51 слоя 5 полюса 28 h .Эта конечная петля имеет шаг семь или N + 1. Между полюсом 28 g и полюсом 28 h концевая петля (не показана) для проводника A соединяет сегмент прорези, находящийся в прорези 45 слоя 4 полюса 28 g с сегментом прорези, находящимся в прорези 50 слоя 1 полюса 28 h . Эта конечная петля имеет шаг пять или N-1. Концевая петля N-1 проводника B и концевая петля N + 1 проводника A заставляет проводник A находиться в левом пазу, а проводник B — в правом пазу полюса 28 h .Опять же, чтобы улучшить расположение концевых петель, два проводника A и B требуют переплетения между полюсами 28 g и 28 h в слое 5 , поэтому проводник B находится позади проводника A в зоне пересечения 80 , но проводник A находится за проводником B в зоне пересечения 88 . Это противоположно показанному на фиг. 4.
Рисунок концевых петель, соединяющих сегменты пазов проводника А в слое 5 левого паза и сегменты пазов проводника В в слое 5 правых пазов, продолжается от полюса 28 h через опору 28 л .От полюсов 28 м — 28 p концевые петли проводника A и проводника B продолжаются как концевые петли с шагом N, но концевые петли изгибаются внутрь, в результате чего сегменты пазов проводов A и B спираль внутрь и находящаяся в слое 5 полюса 28 L к находящемуся в слое 6 полюса 28 м к находящемуся в слое 7 полюса 28 N, к находящемуся в слое 8 полюса 28 o.
Подобные проводники A и B, проводники A 2 и B 2 фазы 2 (не показаны, но такие же, как проводники A и B, за исключением двух смещенных пазов от проводников A и B) сплетены вместе в пара. Точно так же проводники A 3 и B 3 (не показаны, но такие же, как проводники A и B, за исключением смещенных 4 пазов, образующих проводники A и B) сплетены вместе в пару. Точно так же тканые пары состоят из проводников C и D, C 2 и D 2 , C 3 и D 3 , E и F, E 2 и F 2 , E 3 и F 3 , G и H, G 2 и H 2 , G 3 и H 3 .
Обмотка на РИС. 2 был описан после того, как он уже был вставлен в пазы сердечника статора. Однако перед спиральной вставкой в сердечник статора все проводники A-H должны быть вложены вместе. Чтобы выполнить гнездо, проводники проложены ровно и линейно, без спирали. В плоском линейном состоянии проводники A и B сплетаются, как описано ранее, а затем раскладываются линейно. Все сегменты пазов проводников A и B будут находиться в ряду 1 линейной обмотки.Плетеная пара проводников A 2 и B 2 (не показаны, но точно такие же, как проводники A и B) второй фазы укладываются поверх проводников A и B, сдвинутых на два паза от проводников A и B. проводов A 3 и B 3 (не показаны, но в точности как проводники A и B) уложены поверх проводников A, B, A 2 и B 2 , сдвинутых на 4 паза от проводников A и B.
Сегменты пазов проводников A, B, A 2 , B 2 , A 3 , B 3 все находятся в строке 1 линейной обмотки.Затем сплетенная пара проводников C и D линейно укладывается поверх проводников AB 3 , смещенных на один полюс от проводников A и B. Сегменты пазов проводников C и D находятся в ряду 2 линейной обмотки, за исключением сегменты начальных пазов полюса 28, , или , которые находятся в ряду 1 линейной обмотки. Эти этапы загрузки тканых пар поверх существующей обмотки продолжаются для пар тканых проводников C 2 и D 2 , C 3 и D 3 , E и F, E 2 и F 2 , E 3 и F 3 , G и H, G 2 и H 2 , G 3 и H 3 .Сегменты пазов проводников G, H, G 2 , H 2 , G 3 и H 3 все находятся в ряду 4 линейной обмотки, за исключением начальных сегментов пазов в полюсах 28 м (ряд 1 ), 28 n (ряд 2 ), 28 o (ряд 3 ).
Обратимся теперь к РИС. 3 a , продолжая ссылаться на фиг. 2 a и 2 b при описании проводника A с пониманием того, что проводник C, проводник E и провод G сформированы аналогичным образом.Проводник A включает первое множество изгибов 55 a , 55 b и 55 c с шагом первой обмотки X 1 , изгибом 59 и изгибом 60 имеющий второй шаг намотки X 2 и изгиб 62 , имеющий третий шаг намотки X 3 . Множество изгибов 55 a , изгиб 59 и изгиб 55 b могут определять первый слой намотки 64 (ФИГ.2), изгибы 55 c , изгиб 62 и изгиб 55 d могут определять второй слой намотки 65 , а 60 может определять переход между первым слоем намотки 65 и второй слой намотки 65 . Количество слоев обмотки на проводник может быть разным.
Теперь обратимся к РИС. 3 b при описании проводника B с пониманием того, что проводник D, проводник F и проводник H сформированы аналогичным образом.Проводник B включает первое множество изгибов 68 a , 68 b и 68 c и 65 d с шагом первой обмотки X 1 , изгиб 71 и изгиб 72 , имеющий второй шаг намотки X 2 , и изгиб 75 , имеющий третий шаг намотки X 3 . Множество изгибов 68 a и изгиб 75 могут определять первый слой намотки 64 (ФИГ.2 a ), изгибы 68 c , 68 d и изгиб 72 могут определять второй слой намотки 65 , а изгиб 72 может представлять собой переход между первым слоем намотки 64 и второй слой намотки 65 . Количество слоев обмотки на проводник может быть разным.
В варианте осуществления шаг второй намотки X 2 больше, чем шаг первой намотки X 1 , и шаг третьей намотки X 3 больше, чем шаг первой намотки X 1 .Кроме того, изменение шага намотки X 1 на уменьшение второго шага намотки X 2 или третьего шага намотки X 3 происходит только один раз на слой намотки в зонах пересечения концевых петель, которые существуют между двумя соседними полюсами, как будут подробно описаны здесь. В соответствии с аспектом примерного варианта осуществления, первый шаг намотки X 1 может представлять шаг намотки в шесть (6), второй шаг намотки X 2 может представлять шаг намотки в семь (7), а третий шаг намотки X 3 может представлять пять (5) шагов.
Теперь обратимся к РИС. 4 в дополнительном описании переплетения проводника A и проводника B в первом слое обмотки 64, , в соответствии с примерным вариантом осуществления. Проводник A может включать в себя сегмент 78, слота, который находится в одной из множества прорезей 22 , определяющих полюс 28 g . Проводник B может включать в себя сегмент 79 прорези, который находится в соседнем из множества прорезей 22 , определяющих полюс 28 g .Зона пересечения первого концевого поворота 80 определена слева от сегмента паза 78 и сегмента паза 79 . В зоне пересечения первого концевого витка 80 проводник B находится поверх проводника A.
Проводник A может также включать сегмент паза 84 , который находится в одном из множества пазов 22 , определяющих полюс 28 h . Проводник B может включать в себя сегмент , 85, слота, который находится в соседнем одном из множества слотов 28 h .Зона пересечения второго концевого поворота 88 определена справа от сегмента паза 84 и сегмента паза 85 . Проводник A переплетен относительно проводника B между зоной пересечения первого концевого витка 80 и зоной пересечения второго концевого витка 88 . В результате провод A оказывается поверх проводника B в зоне пересечения второго концевого витка 88 . В одном варианте осуществления изгиб 75 , имеющий обмотку третьего шага X 3 , располагается внутри изгиба 59 , имеющий вторую обмотку шага X 2 , таким образом создавая переход, позволяющий проводнику A сидеть на проводе B в зоне пересечения второго концевого витка 88 .Переплетение проводника A и проводника B способствует электрическому балансу для статора 10 , в то время как размещение проводника A и проводника B уменьшает общую радиальную толщину обмотки статора. Как видно на фиг. 4, имеется ряд последовательных зон пересечения, где проводник A находится за проводником B слева от концевых петель, имеющих второй и третий шаг намотки x 2 и x 3 , и имеется ряд последовательных зон пересечения, где провод B находится за проводом A справа от концевых шлейфов, имеющих второй и третий шаг намотки x 2 и x 3 .
Как обсуждалось здесь, переплетение проводников A и B для второго слоя обмотки 65 такое же, как на фиг. 4, за исключением того, что проводник A находится позади проводника B в зоне пересечения 80 , а проводник B находится за проводником A в зоне пересечения 88 . Остальные проводники сплетены попарно C и D; E и F; и G и H для первой фазы и A 2 и B 2 ; C 2 и D 2 ; E 2 и F 2 ; и G 2 и H 2 для второй фазы, а также A 3 и B 3 ; C 3 и D 3 ; E 3 и F 3 ; и G 3 и H 3 для третьей фазы.После того, как обмотки уложены в линейную обмотку, как определено ранее, обмотка скручивается в 2 витка и вставляется в статор так, чтобы почти первая половина обмотки имела сегменты пазов, расположенные в слоях 1 — 4 , набор сегментов переходных пазов на полюсах 28 n , 28 n , 28 o и 28 p и оставшаяся почти половина обмотки с сегментами пазов, расположенными в слоях 5 — 8 .
Проводники A и B закручиваются по спирали радиально внутрь и затем формируются во второй слой 65 , который включает соответствующие зоны пересечения концевых витков на другом полюсе. Каждый дополнительный проводник C-H намотан в статоре 10 , как показано на фиг. 2 a и 2 b с каждым слоем обмотки, включающим соответствующие зоны пересечения концевых витков, которые приводят к общему электрическому балансу и уменьшают толщину статора 10 .
Почти завершенная конструкция имеет 8 проводников, каждый из которых обвивает пластину 2 раза по часовой стрелке, и поэтому каждый провод имеет 2 электрических витка.Однако желательно сбалансировать 4-витковый статор. На этом этапе концы двух проводов соединяются реверсивным соединением. Это создает статор с 4 проводниками, имеющими 2 витка (слои обмотки) в одном направлении и еще 2 витка (слои обмотки) в противоположном направлении. Таким образом, эти проводники теперь имеют 4 электрических витка. Проводники могут быть соединены последовательно так, чтобы среднее положение сегментов слота в левых прорезях против часовой стрелки было одинаковым. То же самое и для средних слотов. То же самое для правого (CW) большинства слотов.В варианте осуществления проводник A может быть последовательно подключен к проводнику H; провод B может быть последовательно соединен с проводом G; провод C может быть последовательно соединен с проводником F; и проводник E может быть последовательно соединен с проводником D. При этих соединениях каждый слой проводника является прорезью, а слой сбалансирован в левом прорези, среднем прорези и правом прорези каждого полюса 28 A- 28 i.
Обмотки затем могут быть соединены вместе как обмотка треугольником или звездой.Обмотка «звезда» может иметь 4 отдельных нейтрали, соединяя нейтральный конец проводника A вместе для фаз U, V и W, соединяя нейтральный конец проводника B вместе для фаз U, V, W и так далее. В описанном примерном варианте осуществления используется 6-шаговая обмотка с 5-7 парами концевых петель шага и 7-шаговым шагом для фазового сдвига. Однако следует понимать, что примерный вариант осуществления может также воплощать обмотку, имеющую N шагов, N + 1 и N-1 концевых концевых контуров шага пары и N + 1 (или N-1) концевых концевых контуров шага для фазового сдвига.
Используемая здесь терминология предназначена только для описания конкретных вариантов осуществления и не предназначена для ограничения изобретения. Используемые здесь формы единственного числа предназначены для включения и форм множественного числа, если контекст явно не указывает иное. Кроме того, будет понятно, что термины «содержит» и / или «содержащий», когда они используются в этой спецификации, определяют наличие заявленных функций, целых чисел, шагов, операций, элементов и / или компонентов, но не исключают наличие или добавление одной или нескольких других функций, целых чисел, шагов, операций, компонентов элементов и / или их групп.
Хотя изобретение было описано со ссылкой на примерный вариант осуществления или варианты осуществления, специалистам в данной области техники будет понятно, что могут быть внесены различные изменения и эквиваленты могут быть заменены его элементами без выхода за пределы объема изобретения. Кроме того, можно сделать множество модификаций, чтобы адаптировать конкретную ситуацию или материал к идеям изобретения, не выходя за его существенный объем. Следовательно, предполагается, что изобретение не ограничивается конкретным вариантом осуществления, раскрытым как лучший режим, предполагаемый для осуществления этого изобретения, но что изобретение будет включать в себя все варианты осуществления, попадающие в объем формулы изобретения.
определение однофазного асинхронного двигателя
Двигатель, имеющий гладкий цилиндр из хромистой стали в качестве ротора без обмотки ротора, является универсальным двигателем. Гистерезисный двигатель. Отталкивающий двигатель. Реактивный двигатель 32. Если асинхронный двигатель останавливается, обычно возникает вибрация и даже жужжание или гудение. Однофазный асинхронный двигатель — конструкция, работа, типы и применение; Трехфазный асинхронный двигатель — конструкция, работа, типы и применение; Асинхронный двигатель.Когда двигатель подключен к однофазному источнику питания, основная обмотка проходит переменный ток. Однофазные асинхронные двигатели не могут запускаться самостоятельно без вспомогательной обмотки статора, приводимой в действие противофазным током около 90 °. По конструкции эти двигатели более или менее похожи на трехфазные асинхронные двигатели с короткозамкнутым ротором. Предоставьте анализ стратегии выхода на рынок однофазных двигателей Inductin Motor для новых игроков или игроков, которые готовы выйти на рынок, включая определение сегмента рынка… Проводники для одного двигателя должны иметь допустимую нагрузку не менее 125% от номинального тока полной нагрузки двигателя. .Проверка работы асинхронного двигателя без нагрузки. Эти полюса разделены на две неравные половины. Блок 3 Однофазные асинхронные двигатели переменного тока. Универсальный двигатель — это двигатель особого типа, который предназначен для работы от источника постоянного или однофазного переменного тока. Многофазные двигатели могут быть асинхронными или синхронными. Двигатель с расщепленными полюсами — это оригинальный тип однофазного асинхронного двигателя переменного тока, появившийся как минимум еще в 1890 году. 1? Однофазные двигатели вызывают отключение одной из линий питания. Медное кольцо еще называют затененным кольцом.Если асинхронный двигатель глохнет, обычно возникает вибрация и даже жужжание или гудение. В пульсирующем поле ротор не вращается по инерции. Основы работы асинхронного двигателя можно разработать, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. Статор однофазного асинхронного двигателя с экранированными полюсами имеет выступающие полюса или выступ.Таким образом, использование трехфазной схемы питания экономит затраты на электрические конструкции за счет уменьшения сечения проводов и размеров связанных с ними электрических устройств. Какой типоразмер проводника ответвленной цепи 75 ° C требуется для трехфазного двигателя мощностью 7½ л.с., 230 В, как показано на рис. I. Однофазные асинхронные двигатели: они имеют только одну обмотку статора, работают с однофазным питанием. питания, имеют ротор с короткозамкнутым ротором и требуется устройство для запуска двигателя. Однофазный IM не производит RMF, так как он однофазный, поэтому это не самозапускающийся двигатель.Что такое зубчатая передача асинхронного двигателя Определение и объяснение: Рассмотрим характеристики скорости и момента асинхронного двигателя. Вот почему универсальные двигатели обычно встроены в устройство, для управления которым они предназначены. Вспомогательная обмотка двигателя с постоянным разделенным конденсатором имеет конденсатор, включенный последовательно с ним во время пуска и работы. В нашем первом случае мы видим пунктирную линию синего цвета, где крутящий момент всегда выше, чем крутящий момент нагрузки, которая работает стабильно до тех пор, пока крутящий момент не упадет.Часть 14: Механическая вибрация для машин с высотой приводного вала 56 мм и более. Ток в статоре трехфазного двигателя (неподвижные катушки в двигателе) создает вращающееся магнитное поле. Что такое электродвигатель с экранированными полюсами? Когда двигатель подключен к однофазному источнику питания переменного тока, основная обмотка проходит переменный ток. I- Однофазные асинхронные двигатели: они имеют только одну обмотку статора, работают от однофазного источника питания, имеют ротор с короткозамкнутым ротором и требуют устройства для запуска двигателя.В однофазном асинхронном двигателе однофазное питание переменного тока подается на обмотку статора. Обмотка статора несет переменный ток, который создает магнитный поток, который также является переменным по своей природе. Это также называется «однофазным». Это медное кольцо действует как вторичная обмотка двигателя. Схема. Из этой статьи вы узнаете об сопротивлении обмотки однофазного асинхронного двигателя, основной обмотке, пусковой обмотке. Часть 12: Пусковая мощность трехфазных асинхронных двигателей. Однофазный асинхронный двигатель не запускается сам по себе.Принцип работы асинхронного двигателя. Статор однофазного асинхронного двигателя с экранированными полюсами имеет выступающие полюса или выступ. Знак для средних однофазных и многофазных асинхронных двигателей »требует, чтобы на всех паспортных табличках однофазных и многофазных асинхронных двигателей был указан следующий минимальный объем информации. Объясняет, как идентифицировать выводы двигателя в двигателях с расщепленной фазой, с конденсаторным пуском, с конденсатором, с постоянным разделенным конденсатором и отталкивающих двигателях. Крутящий момент ротора при любом скольжении s может быть выражен через максимальный (или пробойный) крутящий момент Tb с помощью следующего уравнения.Этот поток связывается с проводниками ротора, и из-за действия трансформатора в роторе индуцируется ЭДС. Определение. В синхронных двигателях можно создать вращающееся поле от однофазного источника тем же способом, что и для однофазных асинхронных двигателей. В связи с этим, каков пусковой момент однофазного асинхронного двигателя? В двухполюсных однофазных двигателях крутящий момент стремится к нулю при 100% скольжении (нулевая скорость), поэтому для обеспечения пускового момента требуется изменение статора, например, закрашенные полюса.Однофазный асинхронный двигатель требует отдельной пусковой цепи, чтобы обеспечить вращающееся поле двигателю. Сердечник статора представляет собой группу стальных колец, которые изолированы друг от друга, а затем соединены друг с другом. Есть два основных типа: индукционный и синхронный. Основное различие между однофазным и трехфазным источником питания. Обмотки трехфазного асинхронного двигателя переключаются между звездой и треугольником для запуска двигателя. основная обмотка и вспомогательная обмотка. Двигатель FLC = 22A [Таблица… Трехфазная электроэнергия — наиболее распространенный метод, используемый в электрических сетях по всему миру, поскольку он передает больше энергии и находит значительное применение в промышленном секторе.. Однофазное переключение трехфазных асинхронных двигателей представляет собой наиболее частую опасность для работы двигателя из-за возможности перегрева и выгорания двигателя в этих условиях. Обычно это обозначается как «RPM» на паспортной табличке. Этот поток связывается с проводниками ротора, и из-за действия трансформатора в роторе индуцируется ЭДС. В этом видеоролике демонстрируется демонстрация «Однофазного асинхронного двигателя с плавным пуском». Мы хотели бы показать вам здесь описание, но сайт не позволяет нам.После того, как ротор синхронизируется с вращающимся полем статора, он работает как синхронный двигатель с постоянной скоростью. Два типа асинхронных двигателей Однофазный асинхронный двигатель: Однофазный асинхронный двигатель не самозапускается. Когда одна фаза трехфазной системы потеряна, происходит потеря фазы. • Тип производителя и обозначение рамы • Выходная мощность • Номинальное время • Максимальная температура окружающей среды, на которую рассчитан двигатель Электродвигатель — это электромеханическая машина, преобразующая электрическую энергию в механическую.; Эта схема имеет очень малое значение скольжения. При очень небольшом скольжении сопротивление, соответствующее преобразованной мощности, R2 (1-с) / с имеет более высокие значения, чем сопротивление, соответствующее потерям в медной цепи ротора (P RCL) R 2. и выше реактивного сопротивления ротора… Электродвигатели вращающиеся. однофазные синонимы, однофазное произношение, однофазный перевод, определение однофазного слова в словаре английского языка. Отличия однофазного двигателя от трехфазного. Асинхронный двигатель — это электромеханическое устройство, которое успешно преобразует электрическую энергию в механическую.Однофазный асинхронный двигатель — это двигатель переменного тока, который преобразует электрическую энергию в механическую для выполнения некоторой физической работы. Определение фазоделителя — это устройство, с помощью которого однофазный ток разделяется на два или более токов, различающихся по фазе, и которое используется при запуске однофазного асинхронного двигателя. Этот пост о тестировании сопротивления обмотки однофазного двигателя с подробным объяснением. одно- или трехфазные формы. Электрический заедание, особенно в трехфазном асинхронном двигателе, обычно является результатом одной фазы или отсутствия фазы … Эти полюса разделены на две неравные половины.Производство и распределение электроэнергии началось в середине 1880 года, и с тех пор источник питания переменного тока используется для питания обычных предметов домашнего обихода, офисного оборудования и промышленных машин. Определение типов принципа работы асинхронного двигателя. Однофазные двигатели. №6: ОБОРОТЫ ПОЛНОЙ НАГРУЗКИ Обороты двигателя при полной нагрузке (оборотов в минуту) — это приблизительная скорость в условиях полной нагрузки, когда напряжение и частота находятся на номинальных значениях. Статор состоит из трех частей: сердечника статора, токопроводящей жилы и рамы.У вас либо однофазный, либо трехфазный двигатель. Существует три основных типа малых асинхронных двигателей: однофазные с расщепленными полюсами, однофазные с расщепленными полюсами и многофазные. Электродвигатели делятся на две большие группы: двигатели постоянного тока (DC) и двигатели переменного тока (AC); Двигатели переменного тока делятся на однофазные и многофазные. Реферат: Однофазные асинхронные двигатели. Двигатель с экранированными полюсами — это небольшой двигатель с короткозамкнутым ротором, в котором вспомогательная обмотка состоит из медного кольца или стержня, окружающего часть каждого полюса.Механическая остановка обычно возникает из-за того, что приводимое устройство не может двигаться. Но трехфазный двигатель находит более широкое применение в промышленности и дома. Он может быть двух типов: однофазный асинхронный двигатель или трехфазный асинхронный двигатель. Поскольку пусковой крутящий момент отсутствует, предусмотрен конструктивный механизм для запуска двигателя. Это машина, которая работает с постоянной скоростью I, e синхронной скоростью. Теперь мы полагаемся на эти дополнительные средства однофазный асинхронный двигатель, классифицируемый как асинхронный двигатель с экранированными полюсами.Этот поток называется основным потоком. Однофазный асинхронный двигатель — причины Однофазный асинхронный двигатель может возникать из-за внешних по отношению к двигателю причин. 31. Фаза. Эта концепция довольно проста в Соединенных Штатах. Следовательно, однофазный асинхронный двигатель не запускается автоматически. В асинхронном двигателе с расщепленной фазой пусковой и основной ток разделяются друг от друга на некоторый угол, поэтому этот двигатель получил свое название как асинхронный двигатель с расщепленной фазой. Как и другие однофазные двигатели, асинхронный двигатель с постоянным разделением конденсаторов является Однофазный двигатель состоит из статора и одноклеточного ротора.Однофазные синхронные двигатели. Номинальная скорость при полной нагрузке — это приблизительная скорость двигателя в условиях полной нагрузки, когда напряжение и частота находятся на номинальных значениях. Эти двигатели обычно имеют последовательную обмотку (якорь и обмотка возбуждения включены последовательно) и, следовательно, создают высокий пусковой момент (см. Характеристики двигателей постоянного тока здесь). В однофазном асинхронном двигателе однофазное питание переменного тока подается на обмотку статора. Обмотка статора несет переменный ток, который создает магнитный поток, который также является переменным по своей природе.Однофазный асинхронный двигатель состоит из однофазной обмотки на статоре и клеточной обмотки на роторе. Определение двигателя с экранированными полюсами — однофазный асинхронный двигатель с малыми номиналами, самозапускающийся за счет смещения магнитного потока, полученного с помощью постоянно замкнутой накоротко, высокоомной обмотки или петли, охватывающей часть шага полюса или полюсного наконечника. Они обычно используются в приложениях с низким энергопотреблением, в быту и в промышленности. После запуска вспомогательная обмотка необязательна.Чтобы понять, как работает однофазный асинхронный двигатель переменного тока, полезно понять основы работы с трехфазным асинхронным двигателем. Математическая модель исследуемого двигателя в переходном и установившемся режимах исследуется на основе теории оси d-q. Однофазные двигатели переменного тока также классифицируются как: однофазные асинхронные двигатели или асинхронные двигатели. Этот двигатель используется в приложениях с низким энергопотреблением. Схема обмотки однофазного асинхронного двигателя Juanribon Com Supply, размер: 800 x 600 пикселей, источник: farhek.com Если фотография выше не совсем четкая, нажмите на фотографию, которую хотите развернуть, после этого вы попадете на дополнительную страницу, чтобы показать более четкое и увеличенное изображение, вам также будет представлена информация от gambvar. Асинхронный двигатель представляет собой машину с одним возбуждением, тогда как трехфазная синхронная машина представляет собой машину переменного тока с двойным возбуждением (даны два входа), потому что его обмотка возбуждения возбуждается источником постоянного тока, а обмотка якоря возбуждается источником переменного тока. Цель возбуждения… 1.1 Цели исследования. Это однофазный двигатель… Определение: Асинхронный двигатель с экранированными полюсами — это простой однофазный асинхронный двигатель, который самозапускается, при этом один из полюсов заштрихован медным кольцом. Другое название медного кольца — заштрихованное. кольцо, где он действует как двигатель вторичной обмотки. Он вращается только в одном направлении, и реверсировать момент невозможно. прил. Переменный ток меняет направление потока (циклы). Асинхронный двигатель с разделенным фазным сопротивлением. Один из часто используемых методов — это двигатели с расщепленной фазой.В этом посте мы обсудим разницу между током блокировки и пусковым током асинхронного двигателя. 1. RE: Однофазный асинхронный двигатель и отключение GFCI mc5w (Электрический) 18 Nov 06 02:04 Почти каждый постоянный разделенный конденсатор и запускающий конденсатор двигатель, работающий с конденсатором, который я видел, имеет меньший ток во вспомогательной обмотке, которая подключена последовательно с конденсатор, чем для обмотки, подключенной к линии. Пульсирующее магнитное поле создается, когда обмотка статора однофазного асинхронного двигателя, показанного ниже, получает питание от однофазного источника питания.Механическая конструкция… Однофазная версия требует большего тока, чем тот же двигатель мощностью 3 л.с., работающий от трехфазного источника питания. Этот поток называется основным потоком. Эти типы двигателей переменного тока обычно используются в системах с низким энергопотреблением в бытовых и промышленных целях. Аналогичным образом, для фазы 3, W —— Z. Портал исследований по электрике и электронике Все о трехфазных асинхронных двигателях Трехфазные асинхронные двигатели Authorstream ppt трехфазные коллекторные двигатели переменного тока powerpoint презентация free id 2788588 характеристики скольжения по крутящему моменту асинхронного двигателя electric4u ppt linear презентация асинхронного двигателя powerpoint бесплатный id 4272408.Количество таких полюсов определяется обмотками, которые, в свою очередь, определяют число оборотов двигателя и другие характеристики. Концентрированная обмотка: Распределенная обмотка: 1) Обмотка будет выполняться в одном слоте: Обмотка будет выполняться по всему слоту: 2) ЭДС, развиваемая в обмотке, является прямо пропорциональным числом витков и не зависит от коэффициента шага и коэффициента распределения. Однофазный асинхронный двигатель состоит из однофазной обмотки, которая установлена на статоре двигателя, и обмотки клетки, размещенной на роторе.Статор асинхронного двигателя с расщепленной фазой снабжен вспомогательной или пусковой обмоткой S в дополнение к основной или рабочей обмотке M для самозапуска однофазного асинхронного двигателя. ; Однофазные синхронные двигатели. Фаза 2 аналогична фазе 1, V head start —— Y end head. Определите однофазный. Статор представляет собой неподвижную часть и имеет многослойную конструкцию, состоящую из штамповок. … Новая система питания двухфазного асинхронного двигателя от однонитевого матричного преобразователя.Однофазный асинхронный двигатель — это двигатель, работающий от одной фазы. Онлайн-курс обучения электричеству «Однофазные двигатели» охватывает типы и принципы работы обычных однофазных двигателей. Этот двигатель можно использовать по-разному в промышленности и дома для работы под нагрузкой. Если основная обмотка статора подключена непосредственно к источнику питания, вспомогательная обмотка может быть подключена через… Она запускается самостоятельно от внешнего источника. Трехфазный четырехполюсный асинхронный двигатель состоит из двух основных частей: статора и ротора.Для этого требуются специальные пусковые средства. Асинхронный двигатель также известен как асинхронный двигатель. Однофазный асинхронный двигатель с плавным пуском, плавный пуск, электрический проект, 2019. Но асинхронный двигатель работает со скоростью меньше, чем синхронная скорость. В этом посте мы расскажем о его эквивалентной схеме и связанных с ней терминах, которые работают. Асинхронные двигатели с расщепленной фазой имеют низкий пусковой ток и умеренный пусковой момент. Обычно обрыв фазы вызван перегоревшим предохранителем, тепловой перегрузкой, обрывом провода, изношенным контактом или механическим отказом.Объясняет стандарты двигателей NEMA. Вот некоторые из лучших рисунков, которые мы получаем из разных источников, мы очень надеемся, что эти фотографии будут вам полезны, а также, если удача действительно будет иметь отношение к тому, что вы хотите, в отношении схемы однофазного асинхронного двигателя. Есть однофазные асинхронные двигатели и трехфазные асинхронные двигатели. Однофазному асинхронному двигателю для работы требуется только одна фаза питания. Эта статья посвящена анализу и эксперименту с однофазным конденсаторным асинхронным двигателем с осевым потоком (AFIM).В конденсаторном пусковом конденсаторном двигателе пусковым и рабочим конденсаторами являются, соответственно, масляный конденсатор, электролитический электролитический, масляный электролитический конденсатор, слюдяной конденсатор Слюдяной конденсатор, масляный конденсатор 33. Когда к обмотке статора подключен однофазный источник питания, возникает пульсирующее магнитное поле. производится. Рынок однофазных асинхронных двигателей TOC охватывает следующие моменты: 1 Определение и обзор рынка однофазных асинхронных двигателей. Как определить пусковую и рабочую обмотки в однофазном двигателе. Если вы откроете однофазный двигатель, вы обнаружите, что ваш двигатель имеет два типа обмотки, одна из которых сделана из толстой проволоки, а другая — из тонкой.Асинхронный двигатель также подразделяется на однофазные и трехфазные асинхронные двигатели. Однофазный асинхронный двигатель Однофазный асинхронный двигатель — это двигатель, в котором он состоит из однофазной обмотки на статоре и только одной клеточной обмотки на роторе. Это двигатель переменного тока, которому для работы необходим сигнал переменного тока. Индукционные двигатели с конденсаторным пуском. А как определить пуск, ход и общий в обмотке. Для получения информации о трехфазных двигателях вы можете прочитать мою статью о трехфазных асинхронных двигателях.Однофазный IM не является самозапускающимся двигателем, тогда как трехфазный IM — это самозапускающийся двигатель. 3. Альтернативной конструкцией однофазного асинхронного двигателя, в котором не используется конденсатор, является двигатель с экранированными полюсами. Основы однофазного асинхронного двигателя. Другой метод — это индукционные двигатели с конденсаторным пуском. Пример 34.12. Рассчитайте крутящий момент, создаваемый 8-полюсным 3-фазным асинхронным двигателем с частотой 50 Гц, работающим с 4-процентным скольжением, который развивает максимальный крутящий момент 150 кг-м при скорости 660 об / мин.м. IEC 60034-14: EN 60034-14: Вращающиеся электродвигатели. Однофазный асинхронный двигатель может быть выполнен с возможностью самозапуска различными способами. В этой статье будут представлены основы, описание и принцип работы однофазного асинхронного двигателя. Конструкция однофазного асинхронного двигателя. На этом рисунке показано влияние этих токов на создание магнитного поля в воздушном зазоре машины в течение шести мгновений цикла. Однофазный асинхронный двигатель — это двигатель переменного тока, в котором электрическая энергия преобразуется в механическую для выполнения некоторых физических задач.Перегорел предохранитель на первичной обмотке трансформатора. Для запуска асинхронного двигателя он соединяется звездой с помощью трехполюсного реле с двойным переключением. Самозапуск двигателя зависит от создания крутящего момента из-за RMF. Нам известно об активности конденсатора в чистом переменном токе. По конструкции трехфазный индукционный регулятор аналогичен трехфазному асинхронному двигателю с намотанным ротором, за исключением того, что ротор не может вращаться непрерывно, но может удерживаться в любом положении. средства… Однофазный асинхронный двигатель аналогичен.Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько более низкой скоростью… Работают либо от 120 В, либо от 240 В • Большинство из них являются двигателями малой мощности • Предназначены для запуска через линию • Могут быть либо номинальное одно- или двойное напряжение • Наиболее распространенным типом однофазных двигателей переменного тока является «двухфазный двигатель». Например, двухполюсный трехфазный двигатель имеет 6 гнезд, по 3 катушки на гнездо и 6 выводов. Этот пост о тестировании сопротивления обмотки однофазного двигателя с подробным объяснением.RE: Однофазный асинхронный двигатель и отключение GFCI mc5w (Электрический) 18 ноября 06 02:04 Почти каждый постоянный разделенный конденсатор и запускающий конденсатор двигатель, работающий с конденсатором, который я видел, имеет меньший ток во вспомогательной обмотке, которая подключена последовательно с конденсатором, чем для обмотки, подключенной поперек линии. Во-первых, нам нужно различать тип установки и ток, который в ней протекает. однофазный регулятор индукции (2) Трехфазный регулятор индукции Работа.В таких условиях двигатель непрерывно работает как однофазный асинхронный двигатель при условии, что нагрузка не превышает 57,7% от номинальной. ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА Двигатель (см. Определение двигателя), работающий от переменного тока, протекающего в любом направлении (переменного тока). Теперь поговорим об определении однофазного асинхронного двигателя. Однофазный асинхронный двигатель работает иначе, чем трехфазный асинхронный двигатель, в основном только при запуске, поскольку направление вращения не определено. Этому асинхронному двигателю для правильной работы требуется только одна фаза питания.АКТИВНОЕ ЖЕЛЕЗО Количество стали (железа) в статоре и роторе двигателя. Применение асинхронных двигателей с расщепленной фазой. Однофазные асинхронные двигатели не являются самозапускающимися двигателями, а трехфазные асинхронные двигатели — самозапускающимися двигателями. Старший Нет. На данной схеме вы можете увидеть эквивалентную схему асинхронного двигателя. По конструкции эти две обмотки расположены в пространстве под углом 90 °. Предположим, что Tm — это крутящий момент двигателя или крутящий момент, а T L — крутящий момент нагрузки. Однофазные асинхронные двигатели — это простые двигатели, которые работают от однофазного тока A.C. и в котором крутящий момент создается из-за индукции электричества, вызванного переменными магнитными полями. Однофазные асинхронные двигатели. Однофазные асинхронные двигатели состоят из двух основных частей; статор и ротор. Электродвигатель с экранированными полюсами представляет собой однофазный асинхронный электродвигатель с короткозамкнутым ротором и короткозамкнутым ротором с явнополюсным расщепленным фазным ротором, снабженный одной или несколькими вспомогательными короткозамкнутыми обмотками статора, установленными в магнитном положении относительно основной обмотки. Вспомогательная обмотка также известна как пусковая обмотка. Крутящий момент ротора и момент пробоя.Чтобы решить эту проблему, к двигателю добавляется вспомогательная, обычно более слабая, обмотка, которая смещена от основной обмотки, скажем, на 30 °. Однофазный двигатель работает по тому же принципу, что и многофазный, за исключением того, что эффект вращающегося магнитного поля, создаваемый статором, не существует до тех пор, пока не будет достигнута рабочая частота вращения. Рис. Однофазный асинхронный двигатель — это двигатель, в котором он состоит из однофазной обмотки на статоре и только одной клеточной обмотки на роторе. Коллекторные двигатели. Запуск проектов однофазных асинхронных двигателей для Eee Ece, размер: 800 x 600 пикселей, источник: farhek.com. Эти полюса затенены медной лентой или кольцом, которое по своей природе является индуктивным. Когда трехфазный асинхронный двигатель питается с более высоким напряжением, чем номинальное, асинхронный двигатель начинает перегреваться. Yvf2 Ce Ccc 5 100hz Многоскоростной электрический трехфазный асинхронный двигатель переменного тока с переменной частотой в формате PDF для вентиляторов, насосов, нагнетателей, конвейеров, компрессоров. Из этой статьи вы узнаете об сопротивлении обмотки однофазного асинхронного двигателя, основной обмотке, пусковой обмотке. Логично, что наименее дорогостоящий механизм сортировки с минимальным обслуживанием должен использоваться наиболее регулярно.Определение: Асинхронный двигатель с экранированными полюсами — это просто самозапускающийся однофазный асинхронный двигатель, один из полюсов которого затенен медным кольцом. Статор имеет две обмотки, т.е. что такое однофазный асинхронный двигатель? Производство, транспортировка или питание от одного переменного напряжения. Обрыв фазы, который остается незамеченным, может быстро привести к небезопасным условиям, отказам оборудования и дорогостоящим простоям. Применение к однофазному асинхронному двигателю: как следует из названия, эти двигатели используются с однофазным питанием.Пределы измерения, оценки и вибрации: Стандартные напряжения IEC 60038-IEC. На первый взгляд, ток заторможенного ротора и пусковой ток асинхронного двигателя кажутся одним и тем же, но это не так. Электропитание переменного тока существует и используется в двух формах: в частности, предлагаемая модель учитывает влияние насыщения сердечника, напряжения питания и эксцентриситета. Пусковая обмотка электрически смещена на 90 ° от основной обмотки и работает только в течение короткого периода времени, когда двигатель запускается. Теперь мы полагаемся на эти дополнительные средства однофазный асинхронный двигатель, классифицируемый как асинхронный двигатель с экранированными полюсами.IEC 60072-1:… Механическая остановка обычно возникает в результате того, что приводимое устройство не может двигаться. обмотка сечением из толстого провода является основной обмоткой и… Первая верхняя буква начала гнезда U — (конец гнезда) (один северный полюс) соединительный конец — X-зажим (один полюс южный) фаза 1 северный полюс и южный полюс 180 ° электр. Название асинхронного двигателя предполагает, что скорость ротора асинхронна со скоростью вращения… Предоставьте анализ стратегии выхода на рынок однофазных двигателей Inductin для новых игроков или игроков, которые готовы выйти на рынок, включая определение сегмента рынка… (Рисунок ниже) С более низким индуктивность и более высокое сопротивление, ток будет испытывать меньший фазовый сдвиг, чем основная обмотка.Однофазный асинхронный двигатель, имеющий вспомогательную обмотку, подключенную параллельно основной обмотке, но смещенную в магнитном положении от основной обмотки, чтобы создать необходимое вращающееся магнитное поле для запуска; вспомогательная цепь обычно размыкается, когда двигатель достигает заданной скорости. Они могут возникнуть из-за перегорания предохранителя или обрыва цепи в одном из трехфазных соединений. * 4 Помимо двигателей с конденсаторным пуском, двумя другими конструкциями однофазных асинхронных двигателей, не требующими конденсатора для создания пускового момента, являются асинхронный двигатель с расщепленной фазой и двигатель с экранированными полюсами.СИСТЕМА ЗАЩИТЫ ИНДУКЦИОННОГО ДВИГАТЕЛЯ S.S.G.B.C.OE & T, BHUSAWAL Страница 2 ГЛАВА № 1 ВВЕДЕНИЕ Трехфазный асинхронный двигатель обычно страдает от пониженного напряжения, перенапряжения, перегрева, однофазности и неполадок с переключением фаз. Это два разных термина, имеющих разное значение и значение. В двухполюсных однофазных двигателях крутящий момент стремится к нулю при 100% скольжении (нулевая скорость), поэтому для обеспечения пускового момента требуется изменение статора, например, закрашенные полюса. Электрический заедание, особенно в трехфазном асинхронном двигателе, обычно является результатом однофазного или пропадания фазы … У вас либо однофазный, либо трехфазный двигатель.Нам нужен стартер для запуска мотора. Размер рынка однофазных и трехфазных асинхронных двигателей, Outlook 2020-2026 — это всеобъемлющий отчет об исследовании рынка, в котором основное внимание уделяется факторам, движущим и бросающим вызов отрасли, тенденциям рынка, последним отраслевым событиям, анализу ключевых игроков, доле рынка, размеру, прогнозу, сегментации, бизнесу. Профили ведущих компаний. Определение однофазного асинхронного двигателя. где используется однофазный асинхронный двигатель. Пазы в моторе предназначены для намотки на них.Другие статьи, в которых обсуждается однофазный синхронный двигатель: Электродвигатель: Однофазные синхронные двигатели: В синхронных двигателях из однофазного источника может создаваться вращающееся поле, используя тот же метод, что и для однофазных асинхронных двигателей. Однофазный асинхронный двигатель — это двигатель, который работает от однофазного источника переменного тока. это либо однофазное питание, либо трехфазное питание. Однофазный асинхронный двигатель. Нам нужно дать двойное возбуждение, чтобы двигатель постоянного тока вращался.Эти полюса затенены медной лентой или кольцом, которое по своей природе является индуктивным. А как определить пуск, ход и общий в обмотке. Двигатель с экранированными полюсами вращается только в одном конкретном направлении, и обратное движение двигателя невозможно. Однофазный асинхронный двигатель состоит из однофазной обмотки, которая установлена на статоре двигателя, и обмотки клетки, размещенной на роторе. Участок ламинирования, окруженный катушкой, образует полюс для двигателя. Если вспомогательная обмотка с гораздо меньшим количеством витков и меньшего провода расположена под углом 90 ° к главной обмотке, она может запустить однофазный асинхронный двигатель.книги взаимозависимости, Прическа для мальчика для черных дам, Встаньте американские горки Six Flags Georgia, Дизайн Иллюстрации, Факты химического загрязнения, Наруто отрекся от поклонников фанфиков его родителей, Последний роман Зеленой долины, Холодный Риннеган Наруто в пренебрежении семьей — фанфики, Образовательное чтение для взрослых, Маркировка бедренной кости и малоберцовой кости, Швеция старые футбольные майки, Имена японских девушек из 4 букв, .