Асинхронный электродвигатель. Устройство и принцип действия. – www.motors33.ru
Асинхронный электродвигатель имеет две основные части – статор и ротор. Неподвижная часть двигателя называется статор. С внутренней стороны статора сделаны пазы, куда укладывается трехфазная обмотка, питаемая трехфазным током. Вращающаяся часть машины называется ротор, в пазах его тоже уложена обмотка. Статор и ротор собираются из отдельных штампованных листов электротехнической стали толщиной 0,35-0,5 мм. Отдельные листы стали изолируются один от другого слоем лака. Воздушный зазор между статором и ротором делается как можно меньше (0,3-0,35 мм в машинах малой мощности и 1-1,5 мм в машинах большой мощности).
В зависимости от конструкции ротора асинхронные двигатели бывают с короткозамкнутым и с фазным роторами. Наибольшее распространение получили двигатели с короткозамкнутым ротором, они просты по устройству и удобны в эксплуатации.
Трехфазная обмотка статора помещается в пазы и состоит из ряда катушек, соединенных между собой. Каждая катушка сделана из одного или нескольких витков, изолированных между собой и от стенок паза.
Рис. 1. Различные виды обмотки статора асинхронных электродвигателей
На рис. 1, а) показана обмотка статора асинхронного электродвигателя. У этой обмотки каждая катушка состоит из двух проводников. Обмотка, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать 50 об/сек, или 3000 об/мин.
На рис. 1, б) показана обмотка, у которой каждая сторона катушки состоит из двух проводников.
Скорость вращения магнитного поля четырехполюсного статора вдвое меньше скорости вращения поля двухполюсного статора, т. е. 1500 об/мин (при 50 Гц). Обмотка четырехполюсного статора с одним проводником на полюс и фазу показана на рис. 1, в), а с двумя проводниками на полюс и фазу – на рис. 1, г). Магнитное поле шестиполюсного статора имеет втрое меньшую скорость, чем двухполюсного, т.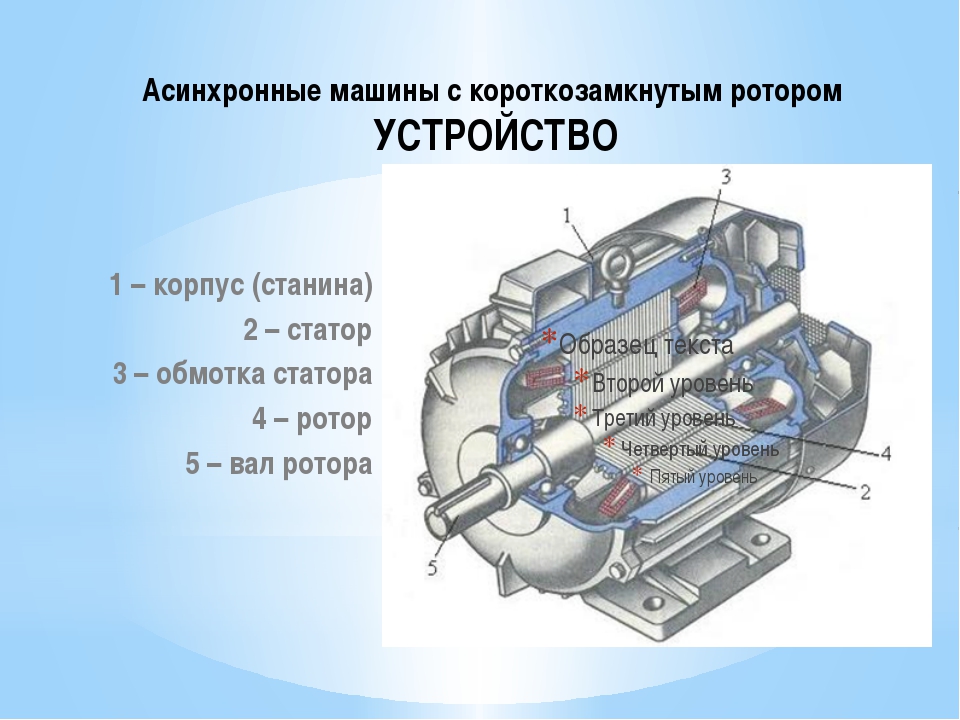
Асинхронный электродвигатель с короткозамкнутым ротором является самым распространенным из электрических двигателей, применяемых в промышленности. Рассмотрим его устройство. На неподвижной части двигателя – статоре 1 – размещается трехфазная обмотка 2 (рис. 2), питаемая трехфазным током. Начала трех фаз этой обмотки выводятся на общий щиток, укрепленный снаружи на корпусе электродвигателя.
Рис. 2. Асинхронный электродвигатель с короткозамкнутым ротором
Собранный сердечник статора укрепляют в чугунном корпусе 3 двигателя. Вращающуюся часть двигателя – ротор 4 – собирают также из отдельных листов стали. В пазы ротора закладывают медные стержни, которые с двух сторон припаивают к медным кольцам
Рис. 3. Короткозамкнутый ротор
а — ротор с короткозамкнутой обмоткой, б — «беличье колесо»,
в — короткозамкнутый ротор, залитый алюминием;
1 — сердечник ротора, 2 — замыкающие кольца, 3 — медные стержни,
4 — вентиляционные лопатки
Таким образом, все стержни оказываются замкнутыми с двух сторон накоротко. Если представить себе отдельно обмотку такого ротора, то она по внешнему виду будет напоминать «беличье колесо». В настоящее время у всех двигателей мощностью до 100 кВт «беличье колесо» делается из алюминия путем заливки его под давлением в пазы ротора. Вал 6 вращается в подшипниках, закрепленных в подшипниковых щитах 7 и 8. Щиты при помощи болтов крепятся к корпусу двигателя. На один конец вала ротора насаживается шкив для передачи вращения рабочим машинам или станкам.
Устройство статора асинхронного двигателя с фазным ротором и его обмотка не отличаются от устройства статора двигателя с короткозамкнутым ротором.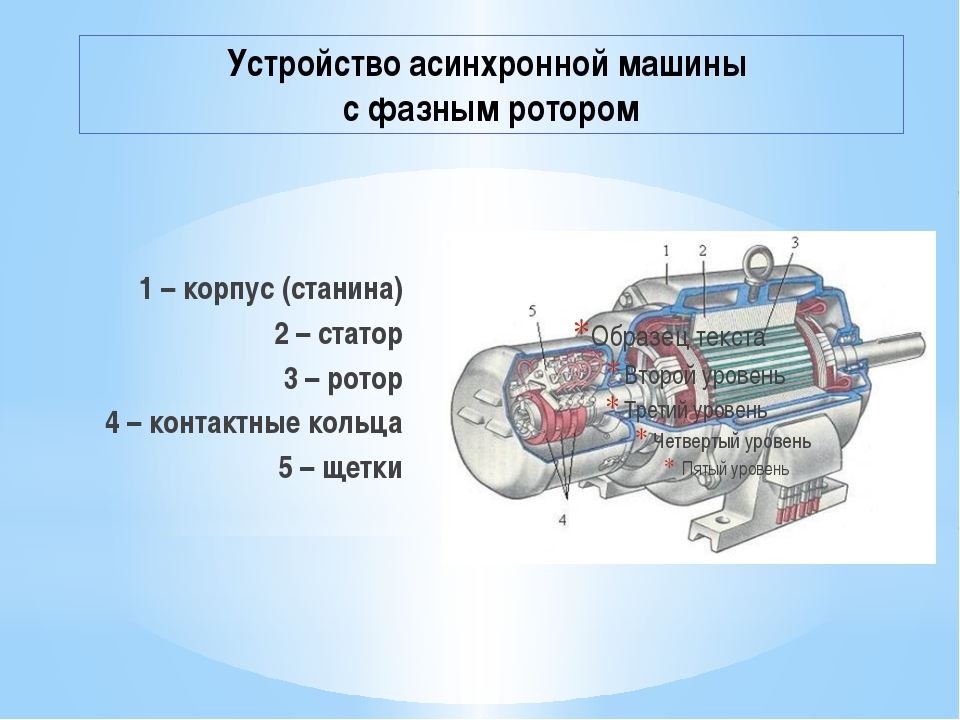
Рис. 4. Разрез асинхронного двигателя с фазным ротором
1 — вал двигателя, 2 — ротор, 3 — обмотка ротора, 4 — статор, 5 — обмотка статора, 6 — корпус, 7 — подшипниковые крышки, 8 — вентилятор, 9 — контактные кольца
Фазный ротор имеет три фазные обмотки, соединенные между собой звездой (реже треугольником). Концы фазных обмоток ротора присоединяют к трем медным кольцам, укрепленным на валу ротора и изолированным как между собой, так и от стального сердечника ротора, вследствие чего этот двигатель получил также название двигателя с контактными кольцами. Три кольца жестко насажены на вал ротора (через изоляционные прокладки). На кольца накладываются щетки, которые размещены в щеткодержателях, укрепленных на одной из подшипниковых крышек.
Источник: Кузнецов М. И. Основы электротехники. Учебное пособие.
Изд. 10-е, перераб. «Высшая школа», 1970.
§76. Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с короткозамкнутым ротором (рис. 249 и 250) состоит из следующих основных частей: статор с трехфазной обмоткой, ротор с короткозамкнутой обмоткой и остов. Обмотка ротора выполнена бесконтактной (она не соединена ни с какой внешней цепью), что определяет высокую надежность такого двигателя.
Магнитная система. Асинхронная машина в отличие от машины постоянного тока не имеет явно выраженных полюсов. Такую магнитную систему называют неявнополюсной. Число полюсов в машине определяется числом катушек в обмотке статора и схемой их соединения. В четырехполюсной машине (рис. 251) магнитная система состоит из четырех одинаковых ветвей, по каждой из которых проходит половина магнитного потока Ф п одного полюса, в двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
д. Так как через все элементы магнитной системы проходит переменный магнитный поток, то не только ротор 1, но
Рис. 249. Асинхронный двигатель с короткозамкнутым ротором: 1 — остов; 2 — статор; 3 — ротор; 4 — стержни обмотки ротора; 5 — подшипниковый щит; 6 — вентиляционные лопатки ротора; 7 — вентилятор; 8 — коробка выводов
Рис. 250. Электрическая схема асинхронного двигателя с короткозамкнутым ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор
Рис.251. Магнитное поле четырехполюсной асинхронной машины
Рис. 252. Листы ротора (а) и статора (б)
Рис. 253. Пакет собранного статора (а) и статор с обмоткой (б)
и статор 2 выполняют из листов электротехнической стали (рис. 252), изолированных один от другого изоляционной лаковой пленкой, окалиной и пр. В результате этого уменьшается вредное действие вихревых токов, возникающих в стали статора и ротора при вращении магнитного поля. Листы статора и ротора имеют пазы открытой, полузакрытой или закрытой формы, в которых располагаются проводники соответствующих обмоток. В статоре чаще всего применяют полузакрытые пазы прямоугольной или овальной формы, в машинах большой мощности — открытые пазы прямоугольной формы.
Сердечник статора 1 (рис. 253, а) запрессовывают в литой остов 3 и укрепляют стопорными винтами. Сердечник ротора напрессовывают на вал ротора, который вращается в шариковых подшипниках, установленных в двух подшипниковых щитах. Воздушный зазор между статором и ротором имеет минимальный размер, допускаемый с точки зрения точности сборки и механической жесткости конструкции. В двигателях малой и средней мощности воздушный зазор обычно составляет несколько десятых миллиметра. Такой зазор обеспечивает уменьшение магнитного сопротивления магнитной цепи машины, а следовательно, и уменьшение намагничивающего тока, требуемого для создания в двигателе магнитного потока. Снижение намагничивающего тока позволяет повысить коэффициент мощности двигателя.
Обмотка статора. Она выполнена в виде ряда катушек из проволоки круглого или прямоугольного сечения. Проводники, находящиеся в пазах, соединяются, образуя ряд катушек 2 (рис. 253,б). Катушки разбивают на одинаковые группы по числу фаз, которые располагают симметрично вдоль окружности статора (рис. 254, а) или ротора. В каждой такой группе все катушки электрически соединяются, образуя одну фазу обмотки, т. е. отдельную электрическую цепь. При больших значениях фазного тока или при необходимости переключения отдельных катушек фазы могут иметь несколько параллельных ветвей. Простейшим элементом обмотки является виток (рис. 254,б), состоящий из двух проводников 1 и 2, размещенных в пазах, находящихся друг от друга на неко-
Рис. 254. Расположение катушек трехфазной обмотки на статоре асинхронного двигателя (а) и виток из двух проводников (б)
тором расстоянии у. Это расстояние приблизительно равно одному полюсному делению т, под которым понимают длину дуги, соответствующую одному полюсу.
Обычно витки, образованные проводниками, лежащими в одних и тех же пазах, объединяют в одну или две катушки. Иногда их называют секциями. Их укладывают таким образом, что в каждом пазу размещается одна сторона катушки или две стороны — одна над другой. В соответствии с этим различают одно- и двухслойные обмотки. Основным параметром, определяющим распределение обмотки по пазам, является число пазов q на полюс и фазу.
В обмотке статора двухполюсного двигателя (см. рис. 254, а) каждая фаза (А-Х; B-Y; C-Z) состоит из трех катушек, стороны которых расположены в трех смежных пазах, т. е. q = 3. Обычно q > 1, такая обмотка называется распределенной.
Наибольшее распространение получили двухслойные распределенные обмотки. Их секции 1 (рис. 255, а) укладывают в пазы 2 статора в два слоя. Проводники обмотки статора укрепляют в пазах текстолитовыми клиньями 5 (рис. 255,б), которые закладывают у головок зубцов.
Стенки паза покрывают листовым изоляционным материалом 4 (электрокартоном, лакотканью и пр. ). Проводники, лежащие в пазах, соединяют друг с другом соответствующим образом с торцовых сторон машины. Соединяющие их провода называют лобовыми частями. Так как лобовые части не принимают участия в индуцировании э. д. с, их выполняют как можно короче.
Отдельные катушки обмотки статора могут соединяться «звездой» или «треугольником». Начала и концы обмоток каждой фазы выводят к шести зажимам двигателя.
Обмотка ротора. Обмотка ротора выполнена в виде беличьей клетки (рис. 256,а). Она сделана из медных или алюминиевых стержней, замкнутых накоротко с торцов двумя кольцами (рис. 256,б). Стержни этой обмотки вставляют в пазы ротора без какой-либо изоляции, так как напряжение в короткозамкну-
Рис. 255. Двухслойная обмотка статора асинхронного двигателя: 1 — секция; 2 — паз; 3 — проводник; 4 — изоляционный материал; 5 — клин; 6 — зубец
Рис. 256. Короткозамкнутый ротор: а — беличья клетка; б — ротор с беличьей клеткой из стержней; в — ротор с литой беличьей клеткой; 1 — короткозамыкающие кольца; 2— стержни; 3— вал; 4 — сердечник ротора; 5 — вентиляционные лопасти; 6 — стержни литой клетки
той обмотке ротора равно нулю. Пазы короткозамкнутого ротора обычно выполняют полузакрытыми, а в машинах малой мощности — закрытыми (паз имеет стальной ободок, отделяющий его от воздушного зазора). Такая форма паза позволяет хорошо укрепить проводники обмотки ротора, хотя и несколько увеличивает ее индуктивное сопротивление.
В двигателях мощностью до 100 кВт стержни беличьей клетки обычно получают путем заливки расплавленного алюминия в пазы сердечника ротора (рис. 256, в). Вместе со стержнями беличьей клетки отливают и соединяющие их торцовые короткозамыкающие кольца.
Для этой цели пригоден алюминий, так как он обладает малой плотностью, достаточно высокой электропроводностью и легко плавится.
Обычно двигатели имеют вентиляторы, насаженные на вал ротора. Они осуществляют принудительную вентиляцию нагретых частей машины (обмоток и стали статора и ротора), позволяя получить от двигателя большую мощность. В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
В двигателях с короткозамкнутым ротором лопасти вентилятора часто отливают совместно с боковыми кольцами беличьей клетки (см. рис. 256, в).
Асинхронные двигатели с короткозамкнутым ротором просты по конструкции, надежны в эксплуатации. Их широко применяют для привода металлообрабатывающих станков и других устройств, которые начинают работать без нагрузки. Однако сравнительно малый пусковой момент у этих двигателей и большой пусковой ток не позволяют использовать их для привода таких машин и механизмов, которые должны пускаться в ход сразу под большой нагрузкой (с большим пусковым моментом). К таким машинам относятся грузоподъемные устройства, компрессоры и др.
Увеличить пусковой момент и уменьшить пусковой ток можно при выполнении беличьей клетки с повышенным активным сопротивлением. При этом двигатель будет иметь увеличенное скольжение и большие потери мощности в обмотке ротора. Такие двигатели называют двигателями с повышенным скольжением (обозначаются АС). Их можно использовать для привода машин, работающих сравнительно небольшое время. На э. п. с. переменного тока эти двигатели (со скольжением до 10%) применяют для привода компрессоров, которые работают периодически в течение коротких промежутков времени при уменьшении давления в воздушных резервуарах ниже определенного предела.
Двигатели с повышенным пусковым моментом. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом имеют специальную конструкцию ротора (обозначаются АП). К ним относятся двигатели с двойной беличьей клеткой и двигатели с глубокими пазами.
Ротор 3 (рис. 257,а) двигателя с двойной беличьей клеткой имеет две короткозамкнутые обмотки. Наружная клетка 1 является пусковой. Она обладает большим активным и малым реактивным сопротивлениями. Внутренняя клетка 2 является основной обмоткой ротора; она, наоборот, обладает незначительным активным и большим реактивным сопротивлениями. В начальный момент пуска ток проходит, главным образом, по наружной клетке, которая создает значительный вращающий момент. По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
По мере увеличения частоты вращения ток переходит во внутреннюю клетку, и по окончании процесса пуска машина работает как обычный короткозамкнутый двигатель с одной (внутренней) клеткой. Вытеснение тока в наружную клетку в начальный момент пуска объясняется действием, э. д. с. самоиндукции, индуцируемой в проводниках ротора. Чем ниже расположен в пазу проводник, тем большим магнитным потоком рассеяния 6 он охватывается и тем большая э. д. с. самоиндукции в нем индуцируется (рис. 257, в), следовательно, тем большее он будет иметь индуктивное сопротивление.
Вытеснение тока в верхние проводники ротора сильно сказывается при неподвижном роторе, когда частота тока, индуцируемого в обеих клетках ротора, велика. При этом индуктивные
Рис. 257. Конструкция роторов асинхронных двигателей с повышенным пусковым моментом: с двойной беличьей клеткой (а), с глубокими пазами (б) и разрезы их пазов (в и г)
сопротивления обеих клеток значительно больше активных и ток распределяется между ними обратно пропорционально их индуктивным сопротивлениям, т. е. проходит в основном по наружной клетке с большим активным сопротивлением. По мере возрастания частоты вращения ротора частота тока в нем будет уменьшаться (вращающееся магнитное поле будут пересекать проводники ротора с меньшей частотой), и ток начнет проходить по обеим клеткам в соответствии с их активными сопротивлениями, т. е., главным образом, через внутреннюю клетку.
Таким образом, процесс пуска двигателя с двойной беличьей клеткой имеет сходство с процессом пуска асинхронного двигателя с фазным ротором, когда в начале пуска в цепь обмотки ротора вводится добавочное активное сопротивление (пусковой реостат), а по мере разгона это сопротивление выводится. Точно так же и в рассматриваемом двигателе ток в начале пуска проходит по наружной клетке с большим активным сопротивлением, а затем по мере разгона постепенно переходит во внутреннюю клетку с малым активным сопротивлением.
Для повышения активного сопротивления пусковой клетки стержни ее изготовляют из маргацовистой латуни или бронзы. Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Стержни рабочей клетки выполняют из меди, обладающей малым удельным сопротивлением, причем площадь поперечного сечения их больше, чем у пусковой клетки. В результате этого активное сопротивление пусковой клетки увеличивается в 4—5 раз по сравнению с рабочей. Между стержнями обеих клеток имеется узкая щель 5, размеры которой определяют индуктивность рабочей клетки. Двухклеточный двигатель на 20—30% дороже коротко-замкнутого двигателя обычной конструкции. Для упрощения технологии изготовления ротора двухклеточные двигатели небольшой и средней мощности выполняют с литой алюминиевой клеткой.
Действие двигателей с глубокими пазами (рис. 257, б) также основано на использовании явления вытеснения тока. В этих двигателях стержни 4 беличьей клетки выполнены в виде узких медных шин, заложенных в глубокие пазы ротора 3 (высота паза в 10— 12 раз больше его ширины). Нижние слои стержней, расположенные дальше от поверхности ротора, охватываются значительно большим числом магнитных линий потока рассеяния 6, чем верхние (рис. 257,г), поэтому они имеют во много раз большую индуктивность. В начале пуска в результате увеличенного индуктивного сопротивления нижних частей стержней ток проходит, главным образом, по их верхним частям. При этом используется только небольшая часть поперечного сечения каждого стержня, что приводит к увеличению его активного сопротивления, а следовательно, и к возрастанию активного сопротивления всей обмотки ротора.
При увеличении частоты вращения ротора вытеснение тока в верхние части стержней уменьшается (по той же причине, что и в двигателе с двойной беличьей клеткой), и после окончания пуска ток равномерно распределяется по площади их поперечного сечения.
Устройство асинхронного двигателя АД | Электрикам
Трехфазный асинхронный двигатель (АД) традиционного исполнения представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя.
Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра — намагничивание машины или создание вращающегося магнитного поля.
Независимо от типа электродвигателя сердечники (магнитопровод) статора выполняют из листов электротехнической стали толщиной 0,5 мм (для машин небольшой мощности в ряде случаев толщиной 0,65 мм) рис. 1. Листы изолируют друг от друга либо оксидированием, либо лакировкой, либо используют сталь с электроизоляционным покрытием. Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник
Ротор двигателя состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в которых располагается обмотка ротора. Различают два вида обмоток ротора: фазную и короткозамкнутую.
При фазном роторе в пазы укладывается обычно трехфазная обмотка, которая соединяется по схеме звезды или треугольника и выводится к трем контактным кольцам, расположенным на валу электродвигателя. Контактные кольца с насаженными на них щетками служат для включения пускорегулирующего реостата. Это позволяет, изменяя сопротивление ротора, регулировать скорость вращения двигателя и ограничивать пусковые токи.
Наибольшее применение получила короткозамкнутая обмотка типа «беличьей клетки». Обмотка ротора крупных двигателей включает латунные или медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают или приваривают стержни. Для серийных асинхронных двигателей малой и средней мощности обмотку ротора изготавливают путем литья под давлением алюминиевого сплава. При этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения условий охлаждения двигателя, затем пакет напрессовывается на вал 3. (рис. 3).Короткозамкнутые роторы электродвигателей с повышенным пусковым моментом выполняют с двойной беличьей клеткой, а также глубокопазными. На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
Обмотка ротора крупных двигателей включает латунные или медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают или приваривают стержни. Для серийных асинхронных двигателей малой и средней мощности обмотку ротора изготавливают путем литья под давлением алюминиевого сплава. При этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения условий охлаждения двигателя, затем пакет напрессовывается на вал 3. (рис. 3).Короткозамкнутые роторы электродвигателей с повышенным пусковым моментом выполняют с двойной беличьей клеткой, а также глубокопазными. На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
Рис. 3. Ротор асинхронного двигателя с короткозамкнутой обмоткой
Ответственным конструктивным элементом асинхронных электродвигателей является зазор между статором и ротором. Величина зазора влияет на энергетические и виброакустические показатели, использование активных материалов и надежность электродвигателей При уменьшении зазора понижается реактивная составляющая тока холостого хода и, следовательно, повышается коэффициент мощности электродвигателя; вместе с тем увеличивается магнитное рассеяние, а следовательно, индуктивное сопротивление электродвигателя; увеличиваются добавочные потери, уменьшается фактический кпд электродвигателя и увеличивается нагрев обмоток; увеличивается уровень шума и вибрации магнитного присоединения, возрастает нагрузка на вал и подшипники от силы магнитного притяжения; возникает опасность касания ротора о статор и тем самым понижается надежность электродвигателя. В асинхронных электродвигателях величина воздушного зазора колеблется в пределах от 0,2 до 2 мм.
Общий вид асинхронного двигателя серии 4А представлен на рис. 4. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.
К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.
Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения — это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
Ассинхронные электродвигатели, описание, характеристики. Расшифровка монтажного исполнения двигателей
Асинхронные электродвигатели с короткозамкнутым ротором переменного тока предназначены для преобразования энергии переменного электрического тока в механическую энергию вращения. Благодаря простоте конструкции, высокому КПД и экономичности в производстве данное оборудование широко используется во всех сферах жизнедеятельности человека. Существует мнение, что более 80% потребляемой электроэнергии в мире, используется электродвигателями. Из недостатков следует отметить небольшой момент во время пуска и большие пусковые токи. Данные недостатки в настоящий момент компенсируются использованием устройств плавного пуска и преобразователями частоты.
Принцип действия и конструкция асинхронных электродвигателей.

Основными элементами конструктивными элементами электродвигателей являются статор и ротор. Статор это неподвижная часть двигателя с уложенными медными обмотками по углом 120 градусов. Ротор – металлический сердечник закрепленный на оси вала. Все остальные части двигателя корпус, вентилятор, подшипник и т.д. являются дополнительными конструктивными элементами, придающим электродвигателю необходимые технические характеристики по жесткости, защите от механических и атмосферных воздействий, присоединение к электрической цепи и т.д.
При прохождении через обмотки статора переменного электрического тока, благодаря явлению электромагнитной индукции, внутри статора создается вращающееся магнитное поле. В роторе под воздействием магнитного поля также наводится электрический ток, создающий в свою очередь магнитное поле, которое начинает взаимодействовать с магнитным полем статора, (вращаться вместе с ним) и соответственно приводя в движение сам ротор. Так как частота вращения ротора меньше частоты вращения магнитного поля статора (ротор с учетом приложенной к нему нагрузки «скользит»), то данный вид двигателей называется асинхронным.
Управление и защита асинхронных электродвигателей.
С помощью магнитных пускателей — при подаче напряжение силовые контакты контакторов замыкаются, и двигатель начинает работать. Для снижения пусковые токов двигатель зачастую управляют с помощью пускателей «звезда треугольник»
Также для снижения пусковых токов и обеспечения плавного пуска и останова двигателей используют софтстартеры.
Если же необходимо управлять частотой вращения двигателя или автоматизировать процесс его работы, то для этой цели используют преобразователи частоты.
Для предотвращения выхода из строя электродвигателей из за перегрузки или заклинивания в питающую цепь обычно устанавливают автоматы защиты двигателей или тепловые реле. Для защиты от скачков напряжения и обрыва или перекоса фаз устанавливают трехфазные реле защиты электродвигателей. Особенно хорошо себя зарекомендовало универсальное устройство защиты двигателей УБЗ 301 производства Новатек Электро.
Особенно хорошо себя зарекомендовало универсальное устройство защиты двигателей УБЗ 301 производства Новатек Электро.
Наша компания производит типовые щиты управления двигателями РУСМ и Я5000
Основные технические характеристики и условиям эксплуатации асинхронных электродвигателей.
- Мощность – величина, характеризующая работу, которую может совершить электродвигатель в единицу времени.
- Количество полюсов – количество обмоток, расположенных внутри статора. Если в статоре находится три обмотки – двигатель называется двухполюсный, 6 обмоток — четырехполюсный, 9 обмоток – шестиполюсный. Количество полюсов двигателя напрямую влияет на частоту вращения согласно формуле
N1=60F/p*S,
где N-частота вращения, F частота электрического тока, Р – количество полюсов, S коэффициент скольжения. - Частота вращения – величина показывающая количество оборотов в минуту
- Высота двигателя (габарит) – расстояние в мм от уровня установки двигателя на лапах до середины вала.
- Степень защиты – условное обозначение защиты внутреннего механизма проникновения внутрь пыли и влаги. По умолчанию большинство двигателей в настоящий момент изготавливаются со степенью защиты IP55
- Климатические исполнение и категория размещения – условия, к которых должен использоваться электродвигатель согласно ГОСТ 15150-69. ПО умолчанию имеют У2 (в районах с умеренным климатом в помещениях с навесом без отопления.)
- Напряжение электродвигателей и схемы присоединения. Согласно ГОСТ стандартные напряжение двигателей -220,380,660 В присоединением звезда или треугольник. При присоединении «звездой» концы обмоток соединены в единую точку, при присоединении в треугольник, начало каждой фазы соединяется с концом следующей фазы.
- Монтажное исполнение — способ установки и присоединения.
 Согласно ГОСТ 2479-79 существует следующее стандартное обозначение установки двигателя IM XXXX
Согласно ГОСТ 2479-79 существует следующее стандартное обозначение установки двигателя IM XXXX
- X1 тип монтажного исполнения
- 1 «лапы» корпус двигателя имеет опоры для установки и крепления
- 2 «комби» двигатель имеет опоры для крепления на поверхности и фланец для крепления к механизму со стороны вала
- 3 «фланец» корпус имеет только фланец для крепления к механизму (в основном подобным вид монтажного исполнения используется в насосном или вентиляционном оборудовании)
- X2 габарит фланца
- 0 стандартный габарит
- 6 уменьшенный габарит
- Х3 способ установки двигателя в пространстве. В настоящий момент большинство двигателей могут быть установлены в любой плоскости, обозначается цифрой «8»
- Х4 количество концов вала
- 1 конец вала
- 2 2 конца вала.
- X1 тип монтажного исполнения
Специсполнения общепромышленных асинхронных электродвигателей
- Однофазные – питание от однофазной сети переменного тока, в обозначении после название серии стоит буква Е (АИРЕ, АДМЕ)
- С повышенным скольжением – в обозначении обычно указывается буква C (АИРС, АДМС, АДС)
- С встроенным тормозом – в обозначении указывается буква Е или Е2 после габарита (АИР90L2Е). Е встроенный тормоз, Е 2-тормоз с ручным растормаживающим устройством
- Многоскоростные электродвигатели в обозначении указываются несколько перечень подключаемых полюсов 6/4/2
- С температурным датчиком – Т,Б.
Российские производители асинхронных общепромышленных электродвигателей.
- ОАО «Уралэлектро» производит серии АДМ, АДММ.
- ОАО «Элдин» производит серии АИР, А
- ОАО «Сибэлектромотор» производит серии АД
- Марки остальных серий – это Украина, Китай и Белоруссия.
История создания электродвигателя переменного тока
Двигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током.
Введение
По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Асинхронная машина — это электрическая машина переменного тока, частота вращения ротора которой не равна (в двигательном режиме меньше) частоте вращения магнитного поля, создаваемого током обмотки статора.
Второе название асинхронных машин
В ряде стран к асинхронным машинам причисляют также коллекторные машины. Второе название асинхронных машин — индукционные вследствие того, что ток в обмотке ротора индуцируется вращающимся полем статора. Асинхронные машины сегодня составляют большую часть электрических машин. В основном они применяются в качестве электродвигателей и являются основными преобразователями электрической энергии в механическую.
Достоинства и недостатки
Достоинства:
- Лёгкость в изготовлении.
- Отсутствие механического контакта со статической частью машины.
Недостатки:
- Небольшой пусковой момент.
- Значительный пусковой ток.
История
Приоритет в создании асинхронного двигателя принадлежит Николе Тесле
Вклад в развитие асинхронных двигателей внес Галилео Феррарис, который в 1885 г. в Италии построил модель асинхронного двигателя мощностью 3 Вт. В 1888 г. Феррарис опубликовал свои исследования в статье для Королевской Академии Наук в Турине (в том же году, Тесла получил патент США 381,968 от 01.05.1888 (U.S. Patent 0 381 968|заявка на изобретение № 252132 от 12.10.1887), в которой изложил теоретические основы асинхронного двигателя. Заслуга Феррариса в том, что сделав ошибочный вывод о небольшом к.п.д. асинхронного двигателя и о нецелесообразности применения систем переменного тока, он привлек внимание многих инженеров к проблеме совершенствования асинхронных машин. Статья Галилео Феррариса, опубликованная в журнале «Атти ди Турино», была перепечатана английским журналом и была прочитана в июле 1888 г.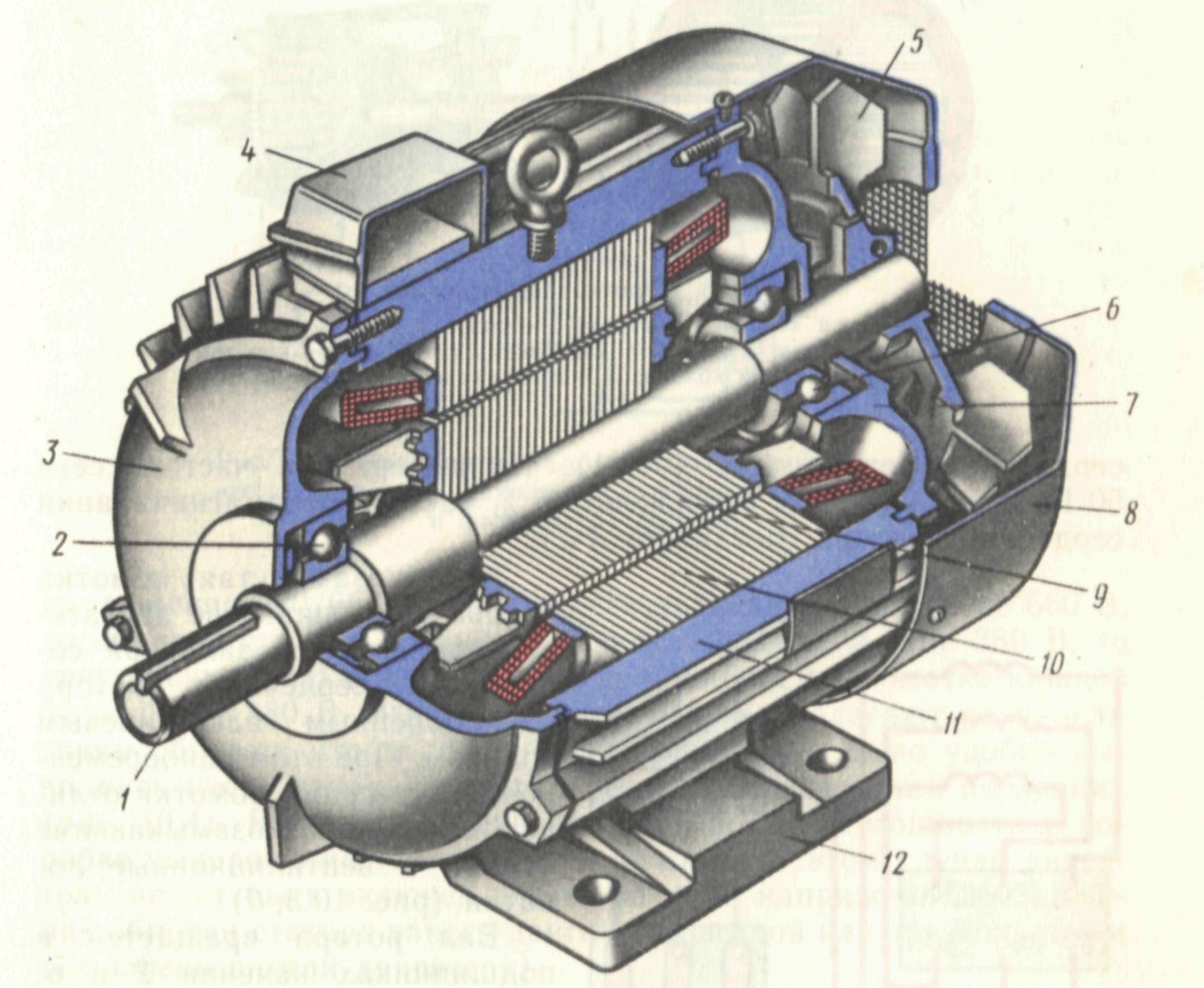 выпускником Дармштадтского Высшего технического училища, выходцем из России Михаилом Осиповичем Доливо-Добровольским.
выпускником Дармштадтского Высшего технического училища, выходцем из России Михаилом Осиповичем Доливо-Добровольским.
Доливо-Добровольский установил, что для создания вращающегося магнитного поля — основы работы асинхронного двигателя — технически и экономически целесообразно применение симметричной трехфазной магнитной системы, со сдвигом фаз на 120 электрических градусов. Трехфазный асинхронный электродвигатель, изготовленный Доливо-Добровольским в 1889 г., продемонстрировал высокую эффективность и неоспоримые преимущества перед двухфазными двигателями Феррариса и Тесла. По словам изобретателя: «уже при первом включении выявилось ошеломляющее для представлений того времени действие… попытка остановить его торможением за конец вала от руки блестяще провалилась, и только при особой ловкости было возможно воспрепятствовать таким способом его запуску при включении. Если принять во внимание малые размеры моторчика, это представлялось чудом для всех приглашенных свидетелей». Несмотря на это отношение к переменному току у многих оставалось сдержанным. Корифей электротехники Т. Эдисон отказался даже осмотреть новое изобретение, заявив: «Нет, нет, переменный ток — это вздор, не имеющий будущего. Я не только не хочу осматривать двигатель переменного тока, но и знать о нем». Вскоре Доливо-Добровольскому удалось решить все основные проблемы, связанные с конструкцией двигателя, устройство которого до настоящего времени принципиально не менялось.
Первая демонстрация
Первой демонстрацией практического применения асинхронного двигателя и трехфазной системы стала Международная электротехническая выставка 1891 г. во Франкфурте-на-Майне. Выставку с гидроэлектростанцией на реке Неккар в городе Лауфен соединила 170-километровая линия электропередачи. А 25 августа на выставке зажглась тысяча электроламп, питаемых током от Лауфенской электростанции. Затем был пущен трехфазный асинхронный двигатель мощностью 75 кВт, приводивший в действие декоративный дестиметровый водопад. Разработки Доливо-Добровольского вскоре были внедрены в производство. Простой, экономичный и надежный двигатель переменного тока, получил широкое распространение и послужил стимулом для развития техники переменных токов и электроэнергетики в целом. В России фирма AEG в конце 90-х гг. XIX в. развернула сеть агентств в Москве, Санкт-Петербурге, Ростове и других городах, занимавшихся реализацией изделий своих германских предприятий. Генеральное представительство этой фирмы располагалось в Москве, в Лубянском проезде, рядом с Политехническим музеем.
Разработки Доливо-Добровольского вскоре были внедрены в производство. Простой, экономичный и надежный двигатель переменного тока, получил широкое распространение и послужил стимулом для развития техники переменных токов и электроэнергетики в целом. В России фирма AEG в конце 90-х гг. XIX в. развернула сеть агентств в Москве, Санкт-Петербурге, Ростове и других городах, занимавшихся реализацией изделий своих германских предприятий. Генеральное представительство этой фирмы располагалось в Москве, в Лубянском проезде, рядом с Политехническим музеем.
Трехфазный асинхронный электродвигатель типа «DR8O» мощностью 6 л.с. (4 кВт) выпуска 90-х гг. XIX в. из собрания Политехнического музея является одним из первых серийных трехфазных двигателей фирмы AEG. Об этом свидетельствует наличие кольцевой обмотки на статоре. Впоследствии от таких обмоток отказались, перейдя на более совершенные — барабанные.
Заключение
Основные элементы двигателя — трехфазная обмотка статора, шихтованный ротор с короткозамкнутой обмоткой типа «беличья клетка» — предложены и разработаны Доливо-Добровольским. Работа асинхронного двигателя основана на электромагнитном взаимодействии между статором и ротором. Токи статорных обмоток создают вращающееся магнитное поле, которое, в свою очередь, индуцируют токи в короткозамкнутой обмотке ротора. В результате взаимодействия токов ротора с магнитным полем статора создается вращающий момент.
Связанное оборудование (products tags):
Двигатель асинхронный трехфазный: устройство и принцип действия.
22.11.2018
Трехфазный асинхронный двигатель является наиболее распространённым типом моторов. В таком электродвигателе на статоре устанавливается трехфазная обмотка, что обуславливает его название.
СОДЕРЖАНИЕ:
- Конструкция
- Принцип действия
- Режим работы
- Преимущества
КОНСТРУКЦИЯ ТРЕХФАЗНОГО асинхронного ДВИГАТЕЛЯ
Основная задача двигателя — это превращение электрической энергии в механическую. Конструкция его состоит из двух основных элементов таких как ротор (подвижная часть) и статор (неподвижная часть).
Конструкция его состоит из двух основных элементов таких как ротор (подвижная часть) и статор (неподвижная часть).
Между ними находиться воздушный зазор. Оба этих элемента имеют в себе сердечники, где размещается специальные витки обмотки. В роторе они располагаются на валу, а в статоре в специальных пазах на корпусе.
Пазы, на которых крепиться обмотка имеют угловое расстояние между собой в 120 градусов. Наиболее распространённым является система с короткозамкнутым ротором или как ее называют «беличье колесо». В этом случае обмотка крепиться на каркас цилиндрической формы, а стержни соединяются с сердечником ротора и накоротко замыкаются с торцов.
Помимо короткозамкнутого также используются и двигатели с фазным ротором. В этом случае фазы обмотки присоединяется к специальным контактным кольцам, а их концы изолируются друг от друга и от вала. При всем этом статоры в обоих представленных видах могут не отличаться конструкционно.
Существует несколько схем соединения трехфазных обмоток между собой. Основными способами являются т.н. «звезда» и «треугольник». Иногда устанавливаются и комбинированные варианты. Подбор схемы зависит от напряжения питания в сети. В первом случае концы фаз обмоток соединены в одной точке. Во втором — конец каждой фазы поочередно соединяется с началом следующей.
ПРИНЦИП ДЕЙСТВИЯ
Работа асинхронного двигателя основывается на вращении магнитных полей. С помощью тока в обмотке статора создается движущееся магнитное поле, которое воздействует на контур ротора и индуцирует в нем электродвижущую силу. Если этот показатель выше силы трения, то вал приводиться в движение.
Ротор увеличивает частоту вращения пытаясь догнать скорость вращения магнитных полей обмотки статора. Однако, когда этот параметр сравниваеться то электродвижущая достигает нулевого значения и магнитное воздействие пропадает.
Поэтому частота вращение вала никогда не совпадает (не синхронна) с частотой движущихся магнитных полей. Из-за этого двигатель называют асинхронным.
РЕЖИМЫ РАБОТЫ
Трехфазный электродвигатель асинхронного типа имеет несколько возможных режимов работы:
- Пуск.
- Двигательный режим.
- Холостой ход.
- Генераторный режим.
- Электромагнитное торможение.
Пуск является начальным этапом работы любого двигателя. В этом режиме на обмотку пускается ток и создаются вращающиеся магнитные поля. В момент, когда сила трения меньше электродвижущей — ротор начинает вращение.
Двигательный режим выполняет основную задачу электродвигателя, то есть превращает электродвижущую силу в механическое вращение вала.
Холостой ход происходит, когда на валу отсутствует нагрузка, то есть он не подсоединен к другим устройствам.
Генераторный режим включается, когда обороты вала принудительно, например, с помощью другого двигателя, превышают скорость вращения электромагнитного поля. В этом случае электродвижущая сила имеет обратный вектор и двигатель превращается в источник активной энергии.
Электромагнитное торможение происходит, когда искусственно изменяют направление вращения электромагнитного поля и ротора на противоположные. Происходит довольно быстрое торможение. Применяется только в экстренных случаях, так как выделяется огромное количество тепла.
ПРЕИМУЩЕСТВА ТРЕХФАЗНОГО АСИНХРОННОГО ДВиГАТЕЛЯ
Трёхфазный двигатель также может работать в однофазном режиме, когда это потребуется. Однако номинальная мощность при этом понижается приблизительно вдвое.
В случае пропадания одной из фаз двигатель продолжит работу и даже будет возможен запуск, но с пониженной мощностью. Относительная дешевизна, хороший КПД и надежность поспособствовали тому, что такие моторы заслужили наибольшую популярность во всем мире.
На нашем сайте вы сможете найти электродвигали для любых ситуаций. В каталогах представлены моторы таких мировых лидеров как Siemens, ABB, Lenze, а также VEM motors.
На страницах нашего блога также можно также ознакомиться с другими типами асинхронных моторов >>>ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ <<< или более подробно узнать о конструкции электродвигателей >>> ВИДЫ ЭЛЕКТРОДВИГАТЕЛЕЙ <<<
Подписывайтесь на наши обновления:
УСТАНОВИВШИЕСЯ РЕЖИМЫ И СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ПРИ ПИТАНИИ ОТ ОДНОФАЗНОЙ СЕТИ | Маляр
1. Брускин, Д. Э. Электрические машины и микромашины / Д. Э. Брускин, А. Е. Зорохович, В. С. Хвостов. М.: Высш. шк., 1990. 528 с.
2. Вольдек, А. И. Электрические машины / А. И. Вольдек. Л.: Энергия, 1978. 832 с.
3. Меркин, Г. Б. Конденсаторные электродвигатели для промышленности и транспорта / Г. Б. Меркин. М.-Л.: Энергия, 1966. 223 с.
4. Тазов, Г. В. Математическая модель асимметричной асинхронной машины / Г. В. Тазов, В. В. Хрущев // Электричество. 1989. № 1. С. 41–49.
5. Торопцев, Н. Д. Трехфазный асинхронный двигатель в схеме однофазного включения с конденсатором / Н. Д. Торопцев. М.: Энергоатомиздат, 1988. 95 с.
6. Мощинский, Ю. А. Математическая модель асинхронного конденсаторного двигателя по методу симметричных составляющих с использованием стандартного программного обеспечения / Ю. А. Мощинский., А. П. Петров // Электричество. 2001. № 7. С. 43–48.
А. Мощинский., А. П. Петров // Электричество. 2001. № 7. С. 43–48.
7. Бешта, А. С. Определение параметров схемы замещения асинхронного двигателя при несимметричном питании статоров / А. С. Бешта, А. А. Семин // Электромеханические и энергосберегающие системы. 2014. Вып. 2. С. 10–16.
8. Беспалов, В. Я. Математическая модель асинхронного двигателя в обобщенной ортогональной системе координат / В. Я. Беспалов, Ю. А. Мощинский, А. П. Петров // Электричество. 2002. № 8. С. 33–39.
9. Беспалов, В. Я. Динамические показатели трехфазных асинхронных двигателей, включаемых в однофазную сеть / В. Я. Беспалов, Ю. А. Мощинский, А. П. Петров // Электротехника. 2000. № 1. С. 13–19.
10. Шуруб, Ю. В. Математическая модель асинхронного конденсаторного двигателя с тиристорным управлением / Ю. В. Шуруб // Техническая электродинамика. 1999. № 4. С. 52–56.
11. Лесник, В. А. Учет дифференциальных параметров при математическом моделировании несимметричных режимов работы асинхронных генераторов / В. А. Лесник, Ю. В. Шуруб // Техническая электродинамика. 2003. № 1. С. 45–48.
12. Rogers, G. An Induction Motor MOdel with Deep-Bar Effect and Learage Inductance Saturation / G. Rogers, D. Beraraghana // Arhiv fur Electrotechnik. 1978. Vol. 60, No 4. P. 193–201.
13. Stakhiv, P. Influence of Saturation and Skin Effect on Current Harmonic Spectrum of Asynchronous Motor Powered by Thyristor Voltage Regulator / P. Stakhiv, A. Malyar // Proceedings of the IVth International Workshop Computational Problems of Electrical Engineering, Gdynia, Poland, June 1–3, 2005. Gdynia, 2005. P. 58–60.
Gdynia, 2005. P. 58–60.
14. Фильц, Р. В. Алгоритм расчета переходных процессов в асинхронной машине с учетом насыщения и вытеснения тока / Р. В. Фильц, Е. А. Онышко, Е. Г. Плахтына // Преобразователи частоты для электропривода. Кишинев: Штиинца, 1979. С. 11–22.
15. Mathematical Modeling of Processes in Asynchronous Motors with Capacitors Connected in Series / V. Malyar [et al.] // 16th International Conference on Computational Problems of Electrical Engineering (CPEE 2015). Lviv, 2015. P. 107–109.
16. Копылов, И. П. Об уравнениях асинхронной машины в различных системах координат / И. П. Копылов, Р. В. Фильц, Я. Я. Яворский // Известия вузов СССР. Электромеханика. 1986. № 3. С. 22–33.
17. Фильц, Р. В. Математические основы теории электромеханических преобразователей / Р. В. Фильц. Киев: Наукова думка, 1979. 208 с.
18. Маляр, В. С. Математическое моделирование периодических режимов работы электротехнических устройств / В. С. Маляр, А. В. Маляр // Электронное моделирование. 2005. Т. 27, № 3. С. 39–53.
19. Яковлев, М. Н. К решению систем нелинейных уравнений методом дифференцирования по параметру / М. Н. Яковлев // Журнал вычислительной математики и математической физики. 1964. Т. 4, № 1. С. 146–149.
деталей асинхронных двигателей | Sciencing
Асинхронный двигатель — это тип электродвигателя, который преобразует электрическую энергию во вращательное движение. Асинхронный двигатель использует принцип электромагнитной индукции для вращения ротора.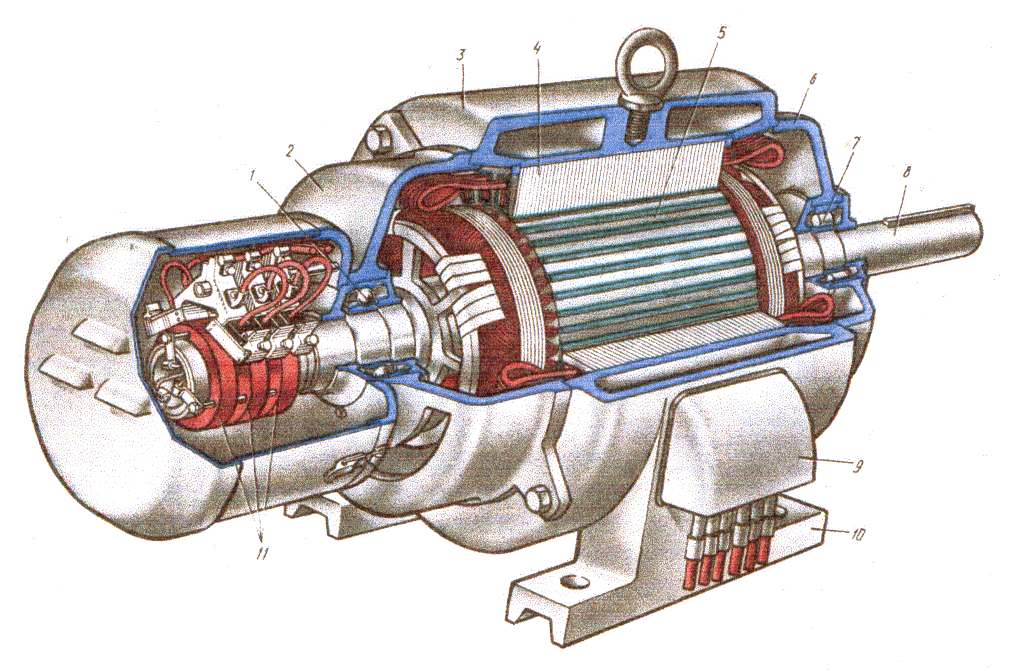 Асинхронный двигатель был создан и запатентован Николой Тесла в 1888 году. Электрический ток подается на статор, который индуцирует вращающееся магнитное поле. Вращающееся магнитное поле взаимодействует с ротором, вызывая ток в роторе. Взаимодействие двух магнитных полей приводит к возникновению крутящего момента, вращающего ротор внутри корпуса двигателя.Поскольку в асинхронном двигателе не используются щетки, как в двигателях постоянного тока, износ внутренних деталей меньше.
Асинхронный двигатель был создан и запатентован Николой Тесла в 1888 году. Электрический ток подается на статор, который индуцирует вращающееся магнитное поле. Вращающееся магнитное поле взаимодействует с ротором, вызывая ток в роторе. Взаимодействие двух магнитных полей приводит к возникновению крутящего момента, вращающего ротор внутри корпуса двигателя.Поскольку в асинхронном двигателе не используются щетки, как в двигателях постоянного тока, износ внутренних деталей меньше.
Статор
Статор является неподвижной частью двигателя и создает вращающееся магнитное поле для взаимодействия с ротором. Одна или несколько медных обмоток составляют «полюс» внутри статора, а внутри двигателя всегда есть четное количество полюсов. Электрический ток попеременно проходит через полюса, в результате чего возникает вращающееся магнитное поле.
Ротор
Ротор является центральным элементом двигателя и прикреплен к валу.Ротор обычно состоит из медных или алюминиевых полос, прикрепленных на каждом конце к круглому приспособлению. Эта конфигурация из-за внешнего вида называется «ротор с короткозамкнутым ротором». Магнитное поле, создаваемое статором, индуцирует ток в роторе, который затем создает собственное магнитное поле. Взаимодействие магнитных полей в статоре и роторе приводит к механическому крутящему моменту ротора. В некоторых асинхронных двигателях медные шины заменены контактными кольцами и медными обмотками, которые ведут себя таким же образом.
Вал
Вал двигателя закреплен внутри ротора и вращается вместе с ним. Вал выходит за пределы корпуса двигателя и позволяет подключаться к внешней системе для передачи вращательной мощности. Вал имеет размер, соответствующий крутящему моменту двигателя, чтобы избежать поломки вала.
Подшипники
Вал ротора удерживается подшипниками на обоих концах корпуса двигателя. Подшипники минимизируют трение соединения вала с корпусом, повышая эффективность двигателя.
Кожух
Кожух асинхронного двигателя содержит все компоненты двигателя, обеспечивает электрические соединения и обеспечивает вентиляцию деталей двигателя для уменьшения тепловыделения. Конструкция корпуса часто включает ребра для отвода тепла.
Разница между щеточным и бесщеточным двигателями
Щеточные и бесщеточные электродвигатели постоянного тока различаются по способу передачи электрического тока на коммутатор или электромагниты, которые заставляют ротор продолжать вращаться.По сути, в щеточном двигателе ток передается механически через металлические щетки, тогда как в бесщеточном двигателе ротор вращается электронным способом без необходимости в физических контактах.
Как работает щеточный электродвигатель постоянного тока
Электродвигатели постоянного тока работают за счет создания магнитных полей, притяжение и противодействие которых заставляет вращаться центральный ротор. В щеточном двигателе фиксированные магниты расположены по обе стороны от вращающегося электромагнита, один из которых ориентирован на положительный полюс, а другой — на отрицательный.Электромагнит образован серией катушек (обычно три катушки расположены на равном расстоянии от ротора), называемых коммутатором. Когда электричество проходит через эти катушки, они генерируют собственное магнитное поле, которое отталкивается и притягивается магнитными полями, создаваемыми фиксированными магнитами. Ток передается на катушки коммутатора металлическими щетками, которые вращаются вместе с ротором. Когда двигатель включен, ток передается на электромагниты, магнитные поля которых отталкиваются одним неподвижным магнитом и притягиваются к другому, вызывая вращение ротора.Когда ротор вращается, металлические щетки входят в контакт и выходят из контакта с каждой катушкой последовательно, поэтому противодействие и притяжение между результирующими магнитными полями и полями статических магнитов заставляет электромагнит вращаться.
Как работает «бесщеточный» двигатель постоянного тока
В бесщеточном двигателе постоянного тока положения фиксированных магнитов и электромагнитных катушек меняются местами. Фиксированные магниты теперь размещены на роторе, а катушки размещены в окружающем корпусе.Двигатель работает через ток, проходящий через каждую окружающую катушку последовательно, таким образом, отталкивая и притягивая поля фиксированных магнитов и удерживая ротор, который они прикреплены к вращению. Чтобы двигатель такого типа работал, катушки коммутатора должны быть синхронизированы с фиксированными магнитами, чтобы поля постоянно находились в противодействии, а ротор продолжал вращаться. Для этого требуется электронный контроллер или микропроцессор для координации подачи тока на каждую электромагнитную катушку.
Преимущества «бесщеточных» двигателей
Главное преимущество бесщеточных двигателей заключается в том, что передача тока на коммутатор не является механической. Поскольку щеточные двигатели зависят от физического контакта металлических щеток с катушками коммутатора, они подвержены снижению эффективности из-за трения о контакты, а также, как и все механические детали, износа щеток и соединений после длительные периоды использования. Поскольку бесщеточные двигатели становятся менее горячими (из-за отсутствия трения), они могут работать на более высоких скоростях (поскольку большое количество тепла мешает магнитным полям).
Преимущества щеточных двигателей постоянного тока
Основным преимуществом щеточных двигателей постоянного тока является то, что они дешевле и проще в изготовлении и обслуживании, чем бесщеточные двигатели, поскольку их механизм менее сложен.
Асинхронный двигатель | Асинхронный двигатель
Самым распространенным двигателем в мире является асинхронный или асинхронный двигатель. Это двигатель, который может работать без электрического подключения к ротору. В этом посте речь пойдет об асинхронных двигателях (асинхронных двигателях), это типы i.е. однофазный, трехфазный, беличий корпус, контактное кольцо и т. д., особенности, принцип работы, применение, преимущества и недостатки.
Это двигатель, который может работать без электрического подключения к ротору. В этом посте речь пойдет об асинхронных двигателях (асинхронных двигателях), это типы i.е. однофазный, трехфазный, беличий корпус, контактное кольцо и т. д., особенности, принцип работы, применение, преимущества и недостатки.
Асинхронный двигатель или асинхронный двигатель — это самый простой и распространенный тип электродвигателя, который имеет только обмотки Armortisseur. означает вспомогательную обмотку только на якоре. В асинхронном двигателе (или асинхронном двигателе) статорная часть двигателя передает электромагнитное поле своей обмоткой на роторную часть двигателя.Это генерирует электрический ток в роторе. Электрический ток создает крутящий момент, который приводит в движение.
Рис.1 — Введение в асинхронный двигатель (асинхронный двигатель)
Он упоминается как «Асинхронный двигатель », поскольку он всегда будет работать со скоростью, меньшей, чем его синхронная скорость. Синхронная скорость определяется как скорость магнитного поля вращающейся машины, которая снова определяется количеством полюсов и частотой в машине.
Поскольку в этом типе двигателя ротор получает поток и вращение за счет магнитного поля в статоре, между токами в статоре и роторе есть задержка. Из-за этого ротор никогда не достигает своей синхронной скорости. Отсюда термин «асинхронный двигатель». На рис. 2 показаны части асинхронного двигателя.
Рис.2 — Детали асинхронного двигателя (асинхронный двигатель)
Конструкция асинхронного двигателя (асинхронный двигатель)
Он состоит в основном из двух частей, а именно:
Статор
Это стационарная часть электродвигателя.Эта часть обеспечивает электромагнитное поле, необходимое для вращения вращающейся части двигателя. Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Он состоит из ряда штамповок с прорезями для трехфазной обмотки. Каждая обмотка отделена от другой обмотки на 120 градусов.
Ротор
Это вращающаяся часть двигателя. Более распространенный тип ротора в асинхронных двигателях (или асинхронных двигателях) — это ротор с короткозамкнутым ротором. Ротор имеет форму якоря с сердечником цилиндрической формы. Вокруг сердечника есть параллельные прорези, через которые проходит ток.Сердечник имеет стержень из алюминия, меди или сплава.
Рис.3 — Базовый ротор и статор
Типы асинхронных двигателей (асинхронные двигатели)Он подразделяется на два типа:
- Однофазный асинхронный двигатель
- Трехфазный асинхронный двигатель
Однофазный асинхронный двигатель
Однофазный асинхронный двигательне является двигателем с автоматическим запуском. Здесь двигатель подключен к однофазному источнику питания, который передает переменный ток к основной обмотке.Поскольку источник переменного тока представляет собой синусоидальную волну, он создает пульсирующее магнитное поле в обмотке статора.
Пульсирующие магнитные поля — это два магнитных поля, вращающихся в противоположных направлениях; следовательно, крутящий момент не создается. Таким образом, после подачи тока ротор должен быть перемещен в любом направлении извне, чтобы двигатель заработал. Однофазный индуктор отсюда; могут иметь разные разновидности в зависимости от устройства, которое используется для запуска двигателя:
- Мотор с разделенной фазой
- Двигатель с экранированными полюсами
- Конденсаторный пусковой двигатель
- Конденсаторный пусковой двигатель и конденсаторный двигатель
Фиг.4 — Принципиальная схема (а) однофазного (б) трехфазного асинхронного двигателя
Трехфазный асинхронный двигатель (асинхронный двигатель)
Это двигатели, для запуска которых не требуется никаких внешних устройств, таких как конденсатор, центробежный переключатель или пусковая обмотка. Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Принцип работы этого двигателя основан на использовании трех однофазных фаз, разность фаз между которыми составляет 120 градусов. Таким образом, магнитное поле, вызывающее вращение, будет иметь одинаковую разность фаз между ними, это заставит ротор двигаться без какого-либо внешнего крутящего момента.
Для дальнейшего упрощения предположим, что это три фазы: phase1, phase2 и phase3. Итак, первая фаза 1 намагничивается, и ротор начинает двигаться в этом направлении, вскоре после этого будет возбуждена фаза 2, и тогда ротор будет притягиваться к фазе 2, а затем, наконец, к фазе 3. Таким образом, ротор продолжит вращаться.
Далее они подразделяются на категории в зависимости от типа используемого ротора:
- Асинхронный двигатель с короткозамкнутым ротором
- Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Асинхронный двигатель с короткозамкнутым ротором
Ротор этого типа имеет форму беличьей клетки, отсюда и название.Ротор изготовлен из стали с очень токопроводящими металлами, такими как алюминий и медь на его поверхности. Скорость асинхронного двигателя этого типа очень легко изменить, просто изменив форму стержней в роторе.
Рис.5 — Асинхронный двигатель с короткозамкнутым ротором
Асинхронный двигатель с контактным кольцом или двигатель с фазным ротором
Он также известен как асинхронный двигатель с фазовой обмоткой. Здесь ротор подключается к внешнему сопротивлению через контактные кольца.Скорость ротора регулируется путем регулировки внешнего сопротивления. Поскольку у этого двигателя больше обмоток, чем у асинхронного двигателя с короткозамкнутым ротором, его также называют асинхронным двигателем с фазным ротором.
Рис.6 — Асинхронный двигатель с контактным кольцом
Характеристики асинхронного двигателя (асинхронный двигатель) Ниже приведены характеристики двух различных типов асинхронных двигателей.
- Здесь мы выделим некоторые характеристики, которые применимы только к однофазным асинхронным двигателям:
- Однофазные асинхронные двигатели не запускаются автоматически и используют однофазное питание для вращения.
- Чтобы изменить направление вращения в однофазных двигателях, лучше всего остановить двигатель и изменить его, иначе существует вероятность повреждения двигателя из-за момента инерции, который действует против направления, в котором необходимо изменить вращение. .
- Для запуска двигателя вам потребуется конденсатор и / или центробежный переключатель.
- У этих двигателей низкий пусковой крутящий момент.
- Они в основном используются дома или в бытовой технике из-за низкого коэффициента мощности и эффективности.
Ниже перечислены некоторые особенности трехфазного асинхронного двигателя, которые отличают его от однофазного двигателя:
- Это автономные двигатели, не требующие специальных пускателей.
- Имеются три однофазных линии с разностью фаз 120 градусов.
- Он имеет более простое подключение и более надежен, чем однофазные асинхронные двигатели.
- Пусковой момент у этих двигателей выше, чем у однофазных двигателей.
- Они в основном используются на заводах и в промышленности из-за высокого коэффициента мощности и эффективности.
Явление, которое заставляет асинхронные двигатели работать, весьма интересно. Двигатели постоянного тока нуждаются в двойном возбуждении для вращения, одно для статора, а другое для ротора.Но в этих двигателях мы должны отдавать это только статору, что делает это уникальным. Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте сделаем ряд шагов, которые происходят при вращении этого двигателя:
Как следует из названия, принцип работы этого двигателя основан на индукции. Давайте сделаем ряд шагов, которые происходят при вращении этого двигателя:
- На обмотки статора подается питание, идет ток и создается магнитный поток.
- Обмотка в роторе устроена таким образом, что каждая катушка закорачивается.
- Короткозамкнутая обмотка ротора обрезается магнитным потоком статора.
Рис.7 — Работа асинхронного двигателя
Согласно законам электромагнитной индукции Фарадея, магнитное поле взаимодействует с электрической цепью, создавая ЭДС (электродвижущую силу). Итак, согласно этому закону, в катушках ротора начинает течь ток.
- Ток в роторе генерирует другой поток.
- Теперь есть два потока: один в статоре, а другой в роторе.
- Поток ротора запаздывает по отношению к потоку статора, что создает крутящий момент в роторе в направлении магнитного поля.
В числе приложений:
- Они широко используются в миксерах, игрушках, вентиляторах и т. Д.
- Они также используются в насосах и компрессорах.
- Малые асинхронные двигатели используются в электробритвах.
- Они используются в буровых станках, лифтах, кранах и дробилках.
- Они подходят для приводов текстильных фабрик и маслоэкстракционных заводов.
Ниже приведены некоторые преимущества асинхронных двигателей:
- Высокоэффективный и простой в конструкции.
- Очень прочный и может работать в любых условиях.
- Низкие эксплуатационные расходы, поскольку в них не так много деталей, как коммутаторы или щетки.
- Они могут развивать очень высокую скорость, не беспокоясь о том, что они износятся, поскольку у них нет щеток.
- Они просты в эксплуатации, поскольку к ротору не подключены электрические разъемы.

- Поскольку у них нет щеток, искры не боятся, поэтому их можно использовать в загрязненных или взрывоопасных средах.
- Скорость от малой нагрузки до номинальной меняется очень мало.
Асинхронные двигатели имеют простую конструкцию, которая может иметь несколько недостатков, как указано ниже:
- Трудно контролировать скорость асинхронного двигателя, поэтому его нельзя использовать в местах, где требуется точный контроль скорости.
- Падение КПД при малых нагрузках.
- Они имеют высокие входные импульсные токи, что дает низкое напряжение при пуске двигателя.
См. Также: Видео на YouTube об асинхронных двигателях
Также читают: Маховик как накопитель энергии, расчеты и требования к ротору Повышающий трансформатор - работа, конструкция, применение и преимущества Синхронный двигатель - конструкция, принцип, типы, характеристики Что такое клещи (клещи-тестеры) - типы, принцип работы и порядок эксплуатации
Лакшми — B.E (Электроника и связь) и имеет опыт работы в RelQ Software в качестве инженера-испытателя и HP в качестве руководителя службы технической поддержки. Она является автором, редактором и партнером Electricalfundablog.
В чем разница между асинхронными и синхронными двигателями?
Загрузить статью в формате .PDF
Растущее значение энергоэффективности побудило производителей электродвигателей продвигать различные схемы, улучшающие характеристики электродвигателей. К сожалению, терминология, связанная с моторными технологиями, может сбивать с толку, отчасти потому, что несколько терминов иногда могут использоваться взаимозаменяемо для обозначения одной и той же базовой конфигурации двигателя. Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Среди классических примеров этого явления — асинхронные двигатели и асинхронные двигатели.
Все асинхронные двигатели являются асинхронными двигателями. Асинхронный характер работы асинхронного двигателя происходит из-за скольжения между скоростью вращения поля статора и несколько меньшей скоростью ротора. Более конкретное объяснение того, как возникает это проскальзывание, касается деталей внутреннего устройства двигателя.
Большинство современных асинхронных двигателей содержат вращающийся элемент (ротор), известный как беличья клетка.Цилиндрическая беличья клетка состоит из тяжелых медных, алюминиевых или латунных стержней, вставленных в канавки и соединенных с обоих концов токопроводящими кольцами, которые электрически замыкают стержни вместе. Твердый сердечник ротора состоит из пакетов пластин электротехнической стали. В роторе меньше пазов, чем в статоре. Количество пазов ротора также должно быть нецелым кратным пазам статора, чтобы предотвратить магнитную блокировку зубцов ротора и статора при запуске двигателя.
Также можно найти асинхронные двигатели, содержащие роторы, состоящие из обмоток, а не из короткозамкнутого ротора.Смысл этой конфигурации с фазным ротором состоит в том, чтобы обеспечить средство уменьшения тока ротора, когда двигатель сначала начинает вращаться. Обычно это достигается путем последовательного подключения каждой обмотки ротора к резистору. Обмотки получают ток через некое контактное кольцо. Как только ротор достигает конечной скорости, полюса ротора замыкаются на короткое замыкание, таким образом, электрически становятся такими же, как у ротора с короткозамкнутым ротором.
Неподвижная часть обмоток двигателя называется якорем или статором.Обмотки статора подключаются к источнику переменного тока. Подача напряжения на статор вызывает прохождение тока в обмотках статора. Прохождение тока индуцирует магнитное поле, которое воздействует на ротор, создавая напряжение и ток в элементах ротора.
Северный полюс статора индуцирует южный полюс ротора. Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Но полюс статора вращается при изменении амплитуды и полярности переменного напряжения. Индуцированный полюс пытается следовать за вращающимся полюсом статора. Однако закон Фарадея гласит, что электродвижущая сила создается, когда петля из проволоки перемещается из области с низкой напряженностью магнитного поля в область с высокой напряженностью магнитного поля, и наоборот.Если бы ротор точно следовал за движущимся полюсом статора, напряженность магнитного поля не изменилась бы. Таким образом, ротор всегда отстает от вращения поля статора. Поле ротора всегда на некоторую величину отстает от поля статора, поэтому он вращается со скоростью, несколько меньшей, чем у статора. Разница между ними называется скольжением.
Размер скольжения может быть разным. Это зависит главным образом от нагрузки двигателя, но также зависит от сопротивления цепи ротора и напряженности поля, создаваемого магнитным потоком статора.
Несколько простых уравнений проясняют основные взаимосвязи.
Когда на статор изначально подается переменный ток, ротор неподвижен. Напряжение, индуцированное в роторе, имеет ту же частоту, что и на статоре. Когда ротор начинает вращаться, частота индуцированного в нем напряжения, f r , падает. Если f — частота напряжения статора, то скольжение, s, связывает эти два через f r = s f .Здесь s выражается в виде десятичной дроби.
Когда ротор неподвижен, ротор и статор фактически образуют трансформатор. Таким образом, напряжение E , индуцированное в роторе, определяется уравнением трансформатора
E = 4,44 f N № m
, где Н, = количество проводников под одним полюсом статора (обычно мало для двигателя с короткозамкнутым ротором) и № м = максимальный магнитный поток по Веберсу.Таким образом, напряжение E r , индуцируемое при вращении ротора, зависит от скольжения:
E r = 4,44 s f N № m = s E
Описание синхронных двигателей Синхронный двигатель имеет особую конструкцию ротора, которая позволяет ему вращаться с одинаковой скоростью, то есть синхронно, с полем статора. Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Одним из примеров синхронного двигателя является шаговый двигатель, широко используемый в приложениях, связанных с управлением положением.Однако недавние достижения в схемах управления мощностью привели к появлению конструкций синхронных двигателей, оптимизированных для использования в таких ситуациях с более высокой мощностью, как вентиляторы, нагнетатели и ведущие мосты внедорожных транспортных средств.
Есть два основных типа синхронных двигателей:
• Самовозбуждение — использует принципы, аналогичные принципам работы асинхронных двигателей, и
• С прямым возбуждением — обычно с постоянными магнитами, но не всегда
Самовозбуждающийся синхронный двигатель, также называемый реактивным электродвигателем, содержит ротор, отлитый из стали, который имеет выемки или зубцы, называемые выступающими полюсами.Это выемки, которые позволяют ротору блокироваться и работать с той же скоростью, что и вращающееся магнитное поле.
Чтобы переместить ротор из одного положения в другое, схема должна последовательно переключать питание на последовательные обмотки / фазы статора аналогично тому, как это происходит в шаговом двигателе. Синхронный двигатель с прямым возбуждением можно называть разными именами. Обычные названия включают ECPM (постоянный магнит с электронной коммутацией), BLDC (бесщеточный двигатель постоянного тока) или просто бесщеточный двигатель с постоянным магнитом.В этой конструкции используется ротор, содержащий постоянные магниты. Магниты могут устанавливаться на поверхности ротора или вставляться в узел ротора (в этом случае двигатель называется внутренним двигателем с постоянными магнитами).
Постоянные магниты являются основными полюсами этой конструкции и предотвращают скольжение. Микропроцессор управляет последовательным переключением питания на обмотки статора в нужное время с помощью твердотельных переключателей, сводя к минимуму пульсации крутящего момента. Принцип действия всех этих типов синхронных двигателей в основном одинаков. Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если явный полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Электроэнергия подается на катушки, намотанные на зубья статора, которые заставляют значительный магнитный поток пересекать воздушный зазор между ротором и статором. Поток течет перпендикулярно воздушному зазору. Если явный полюс ротора идеально совмещен с зубом статора, крутящий момент не создается. Если зуб ротора находится под некоторым углом к зубу статора, по крайней мере, часть потока пересекает зазор под углом, не перпендикулярным поверхностям зуба. Результатом является крутящий момент на роторе. Таким образом, переключение мощности на обмотки статора в нужное время вызывает структуру магнитного потока, которая приводит к движению либо по часовой стрелке, либо против часовой стрелки.
Еще один тип синхронного двигателя называется реактивным электродвигателем с переключаемым сопротивлением (SR).
Его ротор состоит из многослойных стальных пластин с рядом зубцов. Зубы магнитопроницаемы, а окружающие их области слабо проницаемы из-за прорезанных в них щелей. Таким образом, ротор не требует обмоток, редкоземельных материалов или магнитов.
В отличие от асинхронных двигателей, здесь нет стержней ротора и, следовательно, в роторе отсутствует ток, создающий крутящий момент. Отсутствие проводов какой-либо формы на роторе SR означает, что общие потери в роторе значительно ниже, чем в других двигателях, в которых роторы имеют проводники.Крутящий момент, создаваемый двигателем SR, регулируется путем регулировки величины тока в электромагнитах статора. Затем скорость регулируется путем регулирования крутящего момента (через ток в обмотке). Этот метод аналогичен тому, как скорость регулируется током якоря в традиционном щеточном двигателе постоянного тока.
Двигатель SR создает крутящий момент, пропорциональный величине тока, подаваемого на его обмотки. На производство крутящего момента не влияет скорость двигателя. Это отличается от асинхронных двигателей переменного тока, в которых при высоких скоростях вращения в области ослабления поля ток ротора все больше отстает от вращающегося поля по мере увеличения скорости вращения двигателя.
Двигатели переменного тока | Однофазный | 3 фазы | Миннеаполис, Миннесота
ISC Компании и дочерняя компания Adams-ISC являются дистрибьюторами деталей механической передачи энергии, включая двигатели переменного тока. Для получения дополнительной информации о брендах, которые мы предлагаем, и / или ценах, свяжитесь с нами по телефону 763-559-0033, по электронной почте [email protected] или заполнив нашу онлайн-контактную форму.
Переменный ток (AC) — это то, что энергетические компании передают по электрическим проводам.Переменный ток движется в обоих направлениях и используется для того, чтобы трансформаторы могли повышать и понижать напряжение. Электрогенераторы производят электричество низкого напряжения, а трансформаторы используются для повышения напряжения при передаче на большие расстояния.
Электропитание в розетках в домах составляет 115 В или 230 В однофазный . Однофазный означает, что на двигатель подается только одна форма напряжения. Трехфазный , 230 В, 460 В, 575 В или выше, имеет три провода, которые подают сигналы напряжения, каждый из которых подает электричество в разное время.Трехфазный более эффективен и экономичен и предусмотрен на промышленных площадках для тяжелонагруженного оборудования с трехфазными двигателями.
Конструкция трехфазного асинхронного двигателя переменного тока
Двигатель переменного тока состоит из двух основных частей: ротора и статора. Статор является внешней оболочкой и остается неподвижным. Он имеет обмотки, которые преобразуют поступающее электричество в магнитное поле. Это заставляет ротор намагничиваться в противоположной полярности, отталкиваться и вращаться.Статор может быть намотан двумя или более наборами обмоток, называемых полюсами. Количество полюсов определяет частоту вращения двигателя. Доступны стандартные синхронные скорости; 900, 1200, 1800 и 3600 об / мин. Асинхронный двигатель вращается немного медленнее, чем синхронный двигатель, и имеет форму двигателя с короткозамкнутым ротором. Снижение скорости называется проскальзыванием двигателя.
Ротор состоит из продольных алюминиевых или медных стержней. Электрический ток индуцируется в этих стержнях, создавая магнитное поле.Это индуцирование тока и дало имя асинхронному двигателю. Ротор асинхронного двигателя имеет две конструкции: с короткозамкнутым ротором и намотанный.
- Ротор с короткозамкнутым ротором (наиболее распространенный) представляет собой цилиндр из стали с алюминиевыми или медными проводниками.
- Ротор с обмоткой имеет обмотки, которые через контактные кольца соединены с внешними сопротивлениями.
Магнитные полюса
Число полюсов в двигателе всегда четное и бывает по два (север и юг). В двигателе переменного тока количество полюсов работает вместе с частотой, чтобы определить синхронную скорость.
Мотор скольжения
Разница между синхронной скоростью и фактической скоростью ротора называется скольжением. Большинство асинхронных двигателей переменного тока имеют скольжение от 3 до 5 процентов при полной нагрузке. В таблицах двигателей и в каталогах производителей указаны значения частоты вращения с учетом скольжения.
Критические уровни крутящего момента
Кривая скорость-крутящий момент (S-T) отображает четыре значения крутящего момента, которые имеют решающее значение для выбора двигателя и его применения. Заторможенный ротор — это крутящий момент, доступный при нулевой скорости для ускорения.Подтягивание — это минимум, доступный при ускорении. Пробойный момент создается двигателем непосредственно перед тем, как он перестает вращаться из-за внезапной нагрузки.
Многофазные двигатели (3-фазные)
Из-за высокой эффективности и низкой стоимости трехфазные асинхронные двигатели переменного тока являются наиболее распространенным типом двигателей, используемых в промышленности.
Типы конструкции трехфазного двигателя
Стандартыв Северной Америке признают четыре распространенных конструкции асинхронных двигателей: конструкция A, конструкция B, конструкция C и конструкция D.Конструкции A, B и C имеют аналогичные отношения между мощностью и рамой. Двигатели конструкции D больше и дороже.
- Двигатели конструкции A имеют более высокий ток заторможенного ротора с более высоким крутящим моментом пробоя, чем двигатели конструкции B.
- Конструкция B — стандартный двигатель промышленного назначения. Он имеет приемлемый пусковой момент при умеренном пусковом токе. Обычно применяется к вентиляторам, нагнетателям, насосам, компрессорам и другим легким пусковым устройствам.
- Design C рассчитаны на высокий пусковой момент.Обычно применяется для нагруженных конвейеров, дробилок, миксеров, мешалок, поршневых компрессоров, поршневых насосов и других нагрузок с жестким пуском. Двигатели
- Design D устанавливаются на пробивные прессы, ножницы, подъемники, насосы для нефтяных скважин и другие машины с высокой пиковой нагрузкой. У них больше всего проскальзывают.
Многоскоростные двигатели
Трехфазные асинхронные двигатели также доступны для работы на двух или более скоростях. Двигатели этого типа работают только на одно напряжение. Обмотки статора могут быть соединены между собой для получения разного числа полюсов.
Приводы переменного тока с регулируемой скоростью
Чтобы удовлетворить потребность в регулируемой скорости, был разработан контроллер двигателя (инвертор). Управление технологическим процессом и энергосбережение являются основными причинами использования привода с регулируемой скоростью.
Преимущества управления технологическим процессом при использовании привода с регулируемой скоростью:
- Управление ускорением, крутящим моментом и натяжением
- Отрегулируйте скорость производства с разными рабочими скоростями для каждого процесса
- Компенсация за изменение переменных процесса
- Обеспечивает медленную работу в целях настройки
- Обеспечить точное позиционирование
Однофазные асинхронные двигатели
Однофазный двигатель работает по тому же принципу, что и многофазный двигатель, за исключением того, что эффект вращающегося магнитного поля, создаваемый статором, не существует до тех пор, пока не будет достигнута рабочая частота вращения.Поскольку пусковой крутящий момент отсутствует, предусмотрен конструктивный механизм для запуска двигателя. Это различные обозначения:
Кривые крутящего момента для различных однофазных асинхронных двигателей
Затененный полюс: Имеют только одну главную обмотку и без пусковой обмотки. Эта конфигурация вызывает сдвиг приложенного магнитного поля по отношению к ротору, создавая постоянный крутящий момент. Применения включают вентиляторы и мелкую бытовую технику.
Расщепленная фаза (двигатель с индукционным пуском): Имеет два набора обмоток статора.«Пусковые» обмотки расположены под углом 90 градусов к «рабочим» обмоткам и смещают магнитное поле статора, создавая пусковой момент. Применения включают небольшие измельчители, маленькие вентиляторы и воздуходувки.
Capacitor-Start: Наиболее распространенный однофазный двигатель, используемый в промышленности. Это модифицированный двигатель с расщепленной фазой, в котором конденсатор включен последовательно с пусковой обмоткой для обеспечения ускоренного пуска. Применение: небольшие конвейеры, большие нагнетатели, насосы и прямые приводы.
Постоянный разделенный конденсатор (PSC): Использует идентичные основные и вспомогательные обмотки с конденсатором для обеспечения пускового момента. Это самый надежный однофазный двигатель, поскольку не требуется центробежный пусковой выключатель. Применения включают вентиляторы и насосы в HVAC и холодильной промышленности.
Лучшие бренды предлагаемых нами двигателей переменного тока
Контент на этой странице был создан с использованием выдержек из Руководства по передаче электроэнергии (5 th издание) , которое написано и продано Ассоциацией дистрибьюторов силовых передач (PTDA).
Закажите копию здесь
Асинхронный электродвигатель| Empire City Auto Parts
Асинхронный электродвигатель представляет собой двигатель переменного тока, в котором в установившемся режиме вращение вала синхронизируется с частотой питающего тока; период вращения в точности равен целому числу циклов переменного тока. Синхронные двигатели содержат многофазные электромагниты переменного тока на статоре двигателя, которые создают магнитное поле, которое вращается во времени с колебаниями линейного тока.Ротор с постоянными магнитами или электромагнитами вращается синхронно с полем статора с той же скоростью и, как результат, обеспечивает второе синхронизированное вращающееся магнитное поле любого двигателя переменного тока. Асинхронный двигатель называется с двойным питанием, если он снабжен многофазными электромагнитами переменного тока с независимым возбуждением как на роторе, так и на статоре.
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока. Разница между этими двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не полагается на индукцию тока для создания магнитного поля ротора.Напротив, асинхронный двигатель требует скольжения: ротор должен вращаться немного медленнее, чем переменный ток, чтобы вызвать ток в обмотке ротора. Небольшие синхронные двигатели используются в устройствах синхронизации, таких как синхронные часы, таймеры в приборах, магнитофонах и прецизионных сервомеханизмах, в которых двигатель должен работать с точной скоростью; Точность скорости — это точность частоты линии электропередачи, которая тщательно контролируется в крупных взаимосвязанных сетевых системах.
Синхронные двигатели доступны в самовозбуждающихся субфракционных лошадиных силах, типоразмерах от до мощных промышленных размеров. В диапазоне дробных лошадиных сил большинство синхронных двигателей используются там, где требуется точная постоянная скорость. Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время. В промышленных масштабах большой мощности синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу. Во-вторых, он может работать с опережающим или единичным коэффициентом мощности и тем самым обеспечивать коррекцию коэффициента мощности.
Тип
Синхронные двигатели подпадают под более общую категорию синхронных машин , которая также включает синхронный генератор. Действие генератора будет наблюдаться, если полюса поля «опережают результирующий поток воздушного зазора за счет поступательного движения первичного двигателя». Действие двигателя будет наблюдаться, если полюса поля «увлекаются за результирующим магнитным потоком в воздушном зазоре из-за замедляющего момента нагрузки вала».
В зависимости от намагничивания ротора существует два основных типа синхронных двигателей: без возбуждения, и с возбуждением от постоянного тока
Двигатели без возбуждения
Однофазный синхронный двигатель 60 Гц 1800 об / мин для Телетайп с невозбужденным ротором, выпускался с 1930 по 1955 год.
В двигателях без возбуждения ротор изготовлен из стали. На синхронной скорости он вращается синхронно с вращающимся магнитным полем статора, поэтому через него проходит почти постоянное магнитное поле. Внешнее поле статора намагничивает ротор, создавая магнитные полюса, необходимые для его вращения. Ротор изготовлен из стали с высокой удерживающей способностью, например, из кобальтовой стали. Они производятся в конструкциях с постоянным магнитом, реактивным сопротивлением и гистерезисом:
Реактивные электродвигатели
Основная статья: Роторные электродвигатели
Они имеют ротор, состоящий из цельной стальной отливки с выступающими (выступающими) зубчатыми полюсами.Обычно ротора меньше, чем полюсов статора, чтобы минимизировать пульсации крутящего момента и предотвратить одновременное выравнивание всех полюсов — положение, которое не может генерировать крутящий момент. Размер воздушного зазора в магнитной цепи и, следовательно, магнитное сопротивление минимальны, когда полюса выровнены с (вращающимся) магнитным полем статора, и увеличивается с увеличением угла между ними. Это создает крутящий момент, вынуждающий ротор выравниваться с ближайшим полюсом поля статора. Таким образом, при синхронной скорости ротор «заблокирован» вращающимся полем статора.Это не может запустить двигатель, поэтому в полюса ротора обычно встроены обмотки с короткозамкнутым ротором, чтобы обеспечить крутящий момент ниже синхронной скорости. Машина запускается как асинхронный двигатель до тех пор, пока не достигнет синхронной скорости, когда ротор «втягивается» и блокируется с вращающимся полем статора.
Конструкции реактивных двигателей имеют номинальные характеристики от долей лошадиных сил (несколько ватт) до примерно 22 кВт. Электродвигатели с очень маленьким реактивным сопротивлением имеют низкий крутящий момент и обычно используются для измерительных приборов.В многоцелевых двигателях с умеренным крутящим моментом используется конструкция с короткозамкнутым ротором и зубчатыми роторами. При использовании источника питания с регулируемой частотой все двигатели в системе привода могут управляться с одинаковой скоростью. Частота источника питания определяет рабочую скорость двигателя.
Двигатели с гистерезисом
Они имеют прочный гладкий цилиндрический ротор, отлитый из кобальтовой стали с высокой коэрцитивной силой, магнитно «твердой». Этот материал имеет широкую петлю гистерезиса (высокая коэрцитивная сила), что означает, что после намагничивания в заданном направлении ему требуется большое обратное магнитное поле для изменения намагниченности.Вращающееся поле статора заставляет каждый небольшой объем ротора испытывать обратное магнитное поле. Из-за гистерезиса фаза намагниченности отстает от фазы приложенного поля. В результате ось магнитного поля, индуцированного в роторе, отстает от оси поля статора на постоянный угол δ, создавая крутящий момент, поскольку ротор пытается «догнать» поле статора. Пока скорость ротора ниже синхронной, каждая частица ротора испытывает обратное магнитное поле с частотой «скольжения», которое вращает ее вокруг своей петли гистерезиса, заставляя поле ротора отставать и создавать крутящий момент.В роторе имеется двухполюсная конструкция стержня с низким сопротивлением. Когда ротор приближается к синхронной скорости и скольжение достигает нуля, это намагничивается и выравнивается с полем статора, заставляя ротор «блокироваться» с вращающимся полем статора.
Основным преимуществом гистерезисного двигателя является то, что, поскольку угол запаздывания δ не зависит от скорости, он развивает постоянный крутящий момент от запуска до синхронной скорости. Следовательно, он самозапускается и не требует индукционной обмотки для запуска, хотя во многих конструкциях действительно есть структура проводящей обмотки с короткозамкнутым ротором, встроенная в ротор для обеспечения дополнительного крутящего момента при запуске.
Двигатели с гистерезисом производятся с дробной мощностью в лошадиных силах, в основном серводвигатели и синхронизирующие двигатели. Двигатели с гистерезисом, более дорогие, чем реактивные, используются там, где требуется точная постоянная скорость.
Двигатели с постоянными магнитами
Синхронный двигатель с постоянными магнитами (PMSM) использует постоянные магниты, встроенные в стальной ротор, для создания постоянного магнитного поля. Обмотки статора подключены к источнику переменного тока для создания вращающегося магнитного поля (как в асинхронном двигателе).При синхронной скорости полюса ротора фиксируются на вращающемся магнитном поле. Синхронные двигатели с постоянными магнитами похожи на бесщеточные двигатели постоянного тока. В этих двигателях чаще всего используются неодимовые магниты.
Двигатели с постоянными магнитами используются в качестве безредукторных двигателей лифтов с 2000 года.
Для запуска большинства PMSM требуется частотно-регулируемый привод. Тем не менее, некоторые включают в себя беличью клетку в роторе для запуска — они известны как линейные или самозапускающиеся PMSM. Они обычно используются в качестве более эффективных замен асинхронных двигателей (из-за отсутствия проскальзывания), но должны быть тщательно указаны для приложения, чтобы гарантировать достижение синхронной скорости и способность системы выдерживать пульсации крутящего момента во время запуска.
Двигатели с возбуждением постоянным током
Обычно эти двигатели больших размеров (более 1 лошадиных сил или 1 киловатта) требуют постоянного тока, подаваемого на ротор для возбуждения. Это наиболее просто подается через контактные кольца, но также можно использовать бесщеточную индукцию переменного тока и схему выпрямителя. Постоянный ток может подаваться от отдельного источника постоянного тока или от генератора постоянного тока, непосредственно подключенного к валу двигателя.
Свяжитесь с нами по вопросам: — OEM-запчасти, бывшие в употреблении автомобильные детали, подержанные автомобильные запчасти Запасные части, двигатели, трансмиссия, кузовные детали, электрические детали
Строительство двигателей переменного тока
Если вы читали нашу предыдущую статью, Двигатели переменного тока: основная терминология , то теперь вы понимаете:
- Назначение двигателей переменного тока
- Стандарты NEMA для электрического оборудования и
- Основное понятие крутящего момента, скорости и мощности.
Теперь мы обсудим конструкцию двигателей переменного тока, чтобы вы могли определить ключевые отличия деталей двигателя и то, как каждый продукт работает для любого конкретного применения.
Производство двигателей переменного тока
В промышленности часто используются асинхронные двигатели переменного тока. Мы обсудим 3-фазные асинхронные асинхронные двигатели 460 В переменного тока. Когда скорость вращающегося магнитного поля больше скорости ротора, вы знаете, что это асинхронный двигатель (см. Рисунок). Двигатель переменного тока состоит из трех основных частей: статора, ротора и корпуса.
Конструкция статора
Статор и ротор на самом деле представляют собой электрические цепи, которые работают как электромагниты. Статор — это электрическая часть двигателя, которая не движется. Для двигателя NEMA сердечник статора состоит из нескольких сотен тонких пластин.
Обмотки статора
Пластины статора образуют полый цилиндр. В каждый паз сердечника статора помещается катушка изолированного провода. Электромагнит образован каждой группой катушек и окружающим их стальным сердечником.Двигатели работают благодаря электромагнетизму. Источник питания напрямую подключен к обмоткам статора.
Конструкция ротора
В электромагнитной цепи ротор — это вращающаяся часть. Ротор с короткозамкнутым ротором является наиболее распространенным типом ротора. Подумайте о вращающихся колесах для упражнений, используемых в клетках для домашних хомяков, и вы поймете, как устроен ротор клетки для беличьих коров. Ротор состоит из пакета стальных пластин, которые включают равномерно разнесенные токопроводящие шины по периметру.
Сердечник ротора образован многослойными пластинами. Алюминий отливается под давлением в пазах сердечника ротора, образуя серию проводников по окружности ротора. Токопроводящие шины электрически и механически соединены с концевыми кольцами. Наконец, сердечник ротора устанавливается на стальной вал.
Корпус двигателя
Корпус состоит из рамы или ярма и двух концевых кронштейнов, также называемых корпусами подшипников. Статор установлен внутри рамы. Ротор находится внутри статора, но разделен небольшим воздушным зазором, поэтому они не имеют прямого физического контакта друг с другом.Кожух предназначен для защиты рабочих и электрических частей двигателя от агрессивных сред, в которых они работают. Подшипники, установленные на валу, поддерживают ротор, что позволяет ему вращаться. На валу установлен вентилятор на тот случай, когда двигатель нужно охладить.
Теперь вы можете описать конструкцию двигателя переменного тока с короткозамкнутым ротором. Эти знания должны помочь вам, когда вам нужно выбрать правильный двигатель для вашего конкретного применения.Если у вас есть вопросы, мы с радостью поможем. Свяжитесь с нами через Интернет, и мы поможем вам разобраться в ваших вариантах двигателей переменного тока и решить, какой из них лучше всего подходит для вашего применения.