 Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Асинхронный двигатель представляет собой мотор переменного тока, скорость вращения которого не равна частоте напряжения в обмотках статора. Эти электродвигатели получили широкое распространение, потому что являются достаточно выносливыми. Асинхронный однофазный, трехфазный моторы могут работать при значительной нагрузке продолжительное время, не перегреваясь, держать свой крутящий момент. Работа асинхронного двигателя проста, но при этом его характеристики напрямую зависят от параметров обмоток и технологии их укладки.
Область применения
Асинхронный двигатель получил широкое распространение в качестве тягового, второстепенного и прочих видов силовых компонентов. Учитывая особенности его конструкции, отсутствие скользящих контактов, эксплуатация такого мотора намного проще. Также, схема подключения не требует сложных устройств управления, если говорить о простом режиме работы с постоянной частотой. Плюс ко всему и срок службы до сервисного обслуживания намного дольше, так как внутреннее пространство и обмотки не загрязняются графитом.
Применяется асинхронный электродвигатель во многих сферах:
 Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.
Системы вентиляции – благодаря выносливости и неприхотливости при эксплуатации моторы с короткозамкнутыми роторами достаточно часто используются в качестве вентиляторов. Они хорошо переживают продолжительную работу на максимальных оборотах, обеспечивая пользователей или технологическое оборудование интенсивным воздушным потоком.- Конвейеры – благодаря высокому моменту, способности его поддерживать при нагрузках моторы асинхронного типа стали идеальным вариантом для реализации управления подвижными производственными линиями.
- Следящие системы и приводные устройства – особо часто применяют асинхронные двигатели в приводных системах на технологическом оборудовании. Но для организации управления таким типом двигателя потребуется особая схема подключения и частотный блок управления, а ротор асинхронного двигателя оснащается неодимовыми магнитами. Такие моторы рассчитаны на работы с частотой до 400 Гц.
- Бытовая сфера. Из такого мотора можно сделать различные рабочие агрегаты бытового назначения или для небольшой мастерской: вентилятор, управляемые заслонки, циркулярная пила, фуганок, прочее оборудование.
Разновидности моторов
От типа питающей сети асинхронные электродвигатели подразделяются на:

- Однофазный асинхронный двигатель. Применяется в быту и промышленности: старые стиральные машины, бытовые вентиляторы, холодильное и прочие виды оборудования. Имеют меньший КПД, мощность, по сравнению с трехфазными, что объясняется потерями в статоре из-за отсутствия дополнительной фазы.
Устройство асинхронного двигателя
Устройство асинхронного двигателя является достаточно простым:
- Статор – является неподвижной частью электрического двигателя, который снабжен обмотками возбуждения.
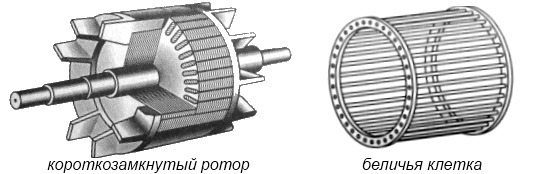
- Ротор – вращающийся элемент мотора, который крутится под действием магнитного поля, создаваемым обмотками возбуждения, расположенными на статоре. Различают 2 типа двигателя от конструкции ротора: короткозамкнутые и фазные.
- Фланцы – статическая часть электрического двигателя, в которой находятся опорные подшипники, удерживающие ротор и являющиеся своего рода крепежом для статора. Он зажимается между двумя фланцами-крышками стяжными болтами. Либо они прикручены к корпусу статора.
- Клеммная коробка – часть статической конструкции двигателя, в которую выводятся концы обмоток со статора. Посредством его осуществляется подключение двигателя к схеме управления.
- Крыльчатка и защитный кожух – используется для обеспечения принудительной вентиляции, а кожух предохранит обслуживающий персонал от травматизма.
- Дополнительные сервисные обмотки – при необходимости совместно с обмоткой возбуждения на статоре может быть дополнительная, предназначенная для контроля и измерения рабочих параметров мотора во время его работы.
- Термодатчики – промышленные асинхронные двигателя, кроме обмоток, также имеются датчики температуры, контролирующие перегрев на случай резкого возрастания тока потребления.
Также двигателя могут быть оборудованными планарными редукторами и изготовленными в едином корпусе. Это преимущественно промышленные типы агрегатов, применяемые на станках, конвейерах и прочих видах оборудования.
Особенности устройства каждого из элементов
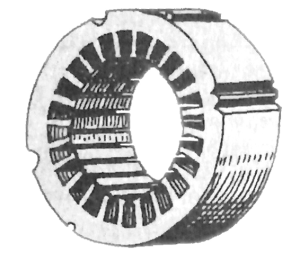
 Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор асинхронного электродвигателя представляет собой цилиндр, изготовленный из листов специальной электротехнической стали толщиной до 0.5 мм, покрытых лаком. Этот цилиндр является сердечником, с внутренней стороны имеются пазы, куда укладываются обмотки. В трехфазных, соответственно, сдвинутые на 120 градусов, в однофазных – на 90. Обмотки могут быть уложены несколькими способами в зависимости от схемы их подключения и эксплуатационных требований. Именно от этого зависит такой показатель, как момент и мощность на валу. А при наличии количества полюсов более, чем 2 пары, то он может использоваться в следящих системах управления приводными механизмами.
Статор запрессован в корпус либо же расположен между фланцами. Корпус и боковые крышки изготовлены из чугуна или сплава алюминия. На них имеются ребра для увеличения площади и повышения эффективности отведения тепла при работе. Такое устройство позволяет лучше охлаждать двигатель, обеспечивая продолжительную работу при предельных нагрузках.
Однополюсная обмотка такого электродвигателя наматывается из 3-х катушек. Каждая из них называется фазой. Для достижения требуемых параметров работы мотора обмотка укладывается в противоположных пазах сердечника. Катушки соединяются между собой специальным образом в соответствии со схемой подключения и ожидаемых характеристик, обеспечивая возбуждение магнитного поля и необходимый момент при вращении.
Все концы датчиков выводятся в клеммную коробку, что позволяет их соединять в звезду или треугольник, что зависит от схемы подключения системы управления, величины питания. 3-фазный электродвигатель является универсальным, при необходимости его можно подключать к однофазному питанию с линейным напряжением. При соединении обмоток треугольником напряжение обмоток равно линейному Uф, а при подключении по схеме звезды – √3Uф.
Ротор
 Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Ротор в асинхронном электродвигателе представляет собой вал, на котором закрепляется сердечник, набранный из листов электротехнической стали. Что трехфазный, что однофазный мотор, ротор имеет практически одинаковую конструкцию. В качестве обмотки в обычных асинхронных моторах на рабочую частоту 50Гц используются куски медного или алюминиевого провода большой толщины или стержни, соединенные между собой торцевыми замыкающими кольцами.
Для того чтобы обмотка надежно удерживалась в сердечнике, имеются специальные пазы, куда она запрессована. Торцевые кольца могут быть снабжены вентиляционными лопатками, предназначенными для улучшения интенсивности охлаждения внутреннего пространства. Вал закреплен на подшипниках, впрессованных во фланцы или плитах, закрепленных к станине в зависимости от устройства.
Между валом и статором имеется зазор, величина которого зависит от пусковых параметров мотора. Если необходимо увеличить мощность и момент, то он должен быть как можно меньше. Одновременно с ростом мощности увеличиваются и добавочные потери в верхних слоях статора и ротора.
Принцип работы
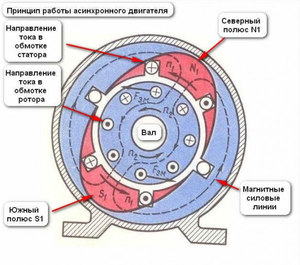
Асинхронный двигатель принцип работы имеет достаточно простой. Он основан на двух физических явлениях:
- При подаче напряжения на статорные обмотки в двигателе возникает вращающееся магнитное поле.
- Поле оказывает воздействие на ток, индуцируемый в роторе. А это создает крутящий момент, поворачивающий вал двигателя относительно полюсов.
За каждый поворот вала полюса меняются полярностью с частотой сети. Поэтому напряжение обмотки статора имеет стандартную частоту, а скорость вращения зависит от:
- нагрузки на валу;
- количества пар полюсов;
- особенностей намотки статора.
Маркировка электродвигателя
Для упрощения процесса подключения и выбора схемы асинхронного 3-фазного ЭД на каждом из них имеется соответствующая маркировка. В ней указываются такие характеристики, как:
- крутящий момент;
- мощность;
- максимальная скорость вращения;
- cosφ.
Также в зашифрованной маркировке имеется указание типа двигателя, количества полюсов. Их необходимо учитывать при выборе мотора для тех или для других нужд. А для облегчения процесса подключения все концы сводятся в клеммную коробку, где подписаны следующим образом:
Если мотор подключается к сети 380 В с линейным напряжением обмоток 220В, то его схема обмоток должна быть треугольником. Но если двигатель подключается к стандартной сети 380В, то схема включения обмоток должна быть звездой.
Скольжение
 При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
При рассмотрении принципа работы асинхронного электрического двигателя применяют такое понятие, как скольжение, и обозначается параметр буквой «s». Оно возникает из-за разницы в скоростях вращения магнитного поля статора и реальной частоты вращения ротора. При этом первый показатель на порядок больше. Следовательно, чем выше разница, тем сильнее скольжение.
Скольжение позволяет объяснить принцип работы. За счет отставания частоты вращения ротора от магнитного поля статора и обеспечивается наведение ЭДС в короткозамкнутом роторе. Но если бы поле вращалось со скоростью частоты ЭДС в роторе, то собственно вращения не происходило.
Скольжение, являясь относительной величиной, измеряется в %. И становится больше при увеличении нагрузки на валу двигателя.
Двигателя с фазным ротором
Когда речь идет о моторах с фазным ротором, то он имеет немного иное устройство. Также имеется 3 обмотки, которые соединены в звезду, а их начала выведены на подводящие кольца. Сравнивая два типа двигателя с короткозамкнутым и фазным роторами, то у второго развивается момент сразу же под высокой нагрузкой. Такие моторы получили применение в системах, где требуется сделать мощный приводной агрегат с высокой тягой. Также такие моторы являются более удобными для регулируемого управления посредством регулятора частоты.
Недостатки асинхронных электродвигателей
В стандартном исполнении без магнитов на роторе асинхронные электродвигатели являются маломощными. Они неспособны сразу обеспечить высокий крутящий момент. А также для их запуска требуется большое количество электрической мощности, которая может превышать предельно допустимые показатели системы питания. Поэтому их пуск должен выполняться без нагрузки. Кроме этого, асинхронные электродвигатели являются мощными источниками электромагнитных помех, сопровождающимися сбоями в работе различных других устройств, находящихся вблизи. Для снижения их влияния необходимо предусматривать качественное заземление и обязательное экранирование.
принцип работы и устройство :: SYL.ru
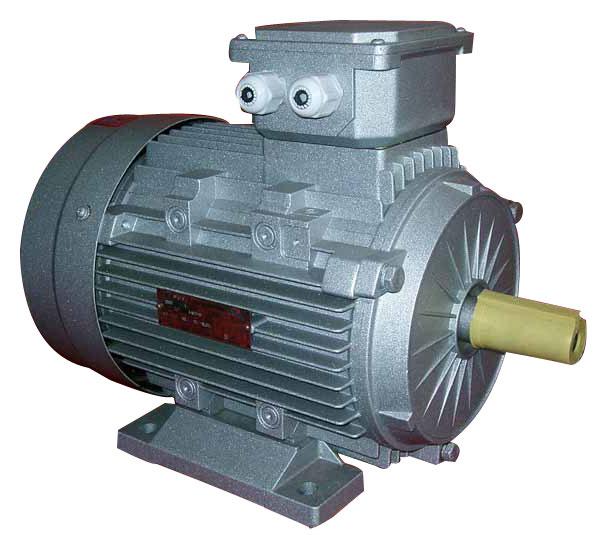
Из всего спектра выпускаемых в настоящее время электрических моторов наибольшее распространение получил двигатель асинхронный трёхфазный. Практически половина производимой в мире электроэнергии используется именно этими машинами. Они широко применяются в металлообрабатывающей и деревообрабатывающей промышленности. Асинхронный двигатель незаменим на фабриках и насосных станциях. Без таких машин не обойтись и в быту, где они используются и в другой домашней технике, и в ручном электроинструменте.
Область применения этих электрических машин расширяется с каждым днём, так как совершенствуются и сами модели, и используемые для их изготовления материалы.
Каковы же основные части этой машины
Разобрав двигатель асинхронный трехфазный, можно наблюдать два главных элемента.
1. Статор.
2. Ротор.

Одна из важнейших деталей — статор. На фото сверху эта часть двигателя расположена слева. Он состоит из следующих основных элементов:
1. Корпус. Он необходим для соединения всех деталей машины. Если двигатель небольшой, то корпус изготавливают цельнолитым. В качестве материала используют чугун. Применяются также сталь или сплавы алюминия. Иногда корпус малых двигателей совмещает функции сердечника. Если же двигатель имеет большие размеры и мощность, то корпус сваривают из отдельных частей.
2. Сердечник. Этот элемент двигателя запрессовывается в корпус. Служит он для улучшения качеств магнитной индукции. Выполняется сердечник из пластин электрической стали. Для того чтобы снизить потери, неизбежные при появлении вихревых токов, каждая пластина покрывается слоем специального лака.
3. Обмотка. Она размещается в пазах сердечника. Состоит из витков медной проволоки, которые собираются в секции. Соединённые в определённой последовательности, они образуют три катушки, которые в совокупности являются обмоткой статора. Подключается она непосредственно к сети, поэтому называется первичной.
Ротор — это подвижная часть двигателя. На фото он находится справа. Служит он для преобразования силы магнитных полей в механическую энергию. Состоит ротор асинхронного двигателя из следующих деталей:
1. Вал. На хвостовиках его закреплены подшипники. Они запрессовываются в щиты, крепящиеся болтами к торцовым стенкам коробки статора.
2. Сердечник, который собирается на валу. Состоит из пластин специальной стали, обладающей таким ценным свойством, как низкое сопротивление магнитным полям. Сердечник, обладая формой цилиндра, и является основой для укладки обмотки якоря. Роторная, или, как её ещё называют, вторичная обмотка получает энергию благодаря магнитному полю, которое появилось вокруг катушек статора при прохождении по ним электрического тока.
Двигатели по типу изготовления подвижной части
Различают двигатели:
1. Имеющие короткозамкнутую обмотку ротора. Один из вариантов исполнения этой детали показан на рисунке.

Асинхронный двигатель с короткозамкнутым ротором имеет обмотку, сделанную из алюминиевых стержней, которые располагаются в пазах сердечника. В торцевой части они замкнуты кольцами накоротко.
2. Электродвигатели, имеющие ротор, изготовленный с контактными кольцами.

У обоих типов асинхронных двигателей конструкция статора одинаковая. Различаются они только исполнением якоря.
Каков же принцип работы
Якорь трёхфазного асинхронного двигателя, исполненный подобным образом, приводится во вращение благодаря эффекту возникновения переменного магнитного поля в статорных катушках. Чтобы понять, каким образом это происходит, необходимо вспомнить физический закон самоиндукции. Он гласит, что вокруг проводника, по которому проходит поток заряженных частиц, возникает магнитное поле. Величина его будет прямо пропорциональна индуктивности провода и интенсивности протекающего в нём потока заряженных частиц. Кроме того, это магнитное поле формирует силу с определённой направленностью. Именно она нас и интересует, так как является причиной вращения ротора. Для эффективной работы двигателя необходимо иметь мощный магнитный поток. Создаётся он благодаря специальному способу монтажа первичной обмотки.
Известно, что источник питания имеет переменное напряжение. Следовательно, магнитное поле вокруг статора будет иметь такую же характеристику, напрямую зависящую от изменения тока в подающей сети. Примечательно то, что каждая фаза смещена одна относительно другой на 120˚.
Что происходит в обмотке статора
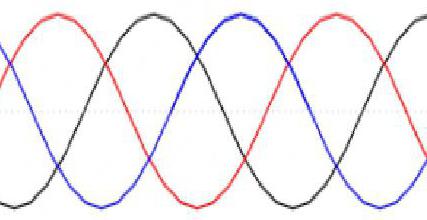
Каждая фаза сети питания подключается к соответствующей катушке статора, поэтому возникающее вокруг них магнитное поле будет смещено на 120˚. Источник питания имеет переменное напряжение, следовательно, вокруг катушек статора, которыми располагает асинхронный двигатель, будет возникать переменное магнитное поле. Схема асинхронного двигателя собирается так, чтобы магнитное поле, возникающее вокруг катушек статора, постепенно изменялось и последовательно переходило от одной обмотки к другой. Таким образом создаётся эффект вращающегося магнитного поля. Можно вычислить его частоту вращения. Измеряться она будет в оборотах за минуту. Определяется по формуле: n=60f/p, где f — это частота переменного тока в подключенной сети (Гц), p — соответствует числу пар полюсов, смонтированных на статоре.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
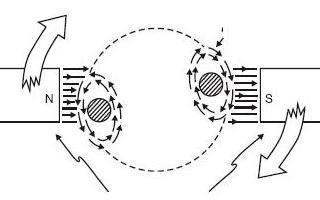
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Эффект скольжения
Ситуация, когда силовые потоки ротора как бы отталкиваются от вращающегося магнитного поля статора, получила название скольжения. Следует отметить, что частота асинхронного двигателя (n1) всегда меньше той, с которой перемещается магнитное поле статора. Объяснить это можно так. Чтобы в роторной обмотке возник ток, она должна быть пересечена магнитным потоком с определённой угловой скоростью. И поэтому справедливо утверждение, что скорость вращения вала больше либо равна нулю, но меньше интенсивности перемещения магнитного поля статора. Ротор имеет частоту вращения, зависящую от силы трения в подшипниках, а также от величины отбора мощности с вала ротора. Поэтому он как бы отстаёт от магнитного поля статора. Именно из-за этого частота называется асинхронной.
Таким образом, электроэнергия питающего источника преобразовалась в кинетическую энергию вращающегося вала. Скорость его вращения прямо пропорциональна частоте тока питающей сети и количеству пар полюсов статора. Для увеличения частоты вращения якоря можно использовать частотные преобразователи. Однако работа этих устройств должна быть согласована с количеством пар полюсов.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».

На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.

Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Как сделать реверс
При возникновении потребности осуществить пуск асинхронного двигателя, изменив направление вращения якоря, надо просто поменять местами два провода подключаемого источника трехфазного напряжения.
Однофазный асинхронных двигателей
В быту проблематично использовать трёхфазные двигатели из-за отсутствия требуемого источника напряжения. Поэтому существует однофазный асинхронный двигатель. Он также имеет статор, но с существенным конструкционным отличием. Оно заключается в количестве и способе расположения обмоток. Это определяет и схему запуска машины.
Если однофазный асинхронный двигатель имеет статор с двумя обмотками, то расположены они будут со смещением по окружности под углом в 90˚. Катушки называются пусковой и рабочей. Соединяются они параллельно, но, чтобы создать условия для появления вращающееся магнитного поля, дополнительно вводится активное сопротивление или конденсатор. Это создаёт сдвиг фаз токов обмоток, близкий к 90˚, благодаря чему создаётся условие для образования вращающегося магнитного поля.
Если статор имеет только одну катушку, то подключённый к ней однофазный источник питания будет причиной пульсирующего магнитного поля. В замкнутой накоротко обмотке ротора появится переменный ток. Он станет причиной возникновения своего магнитного потока. Результирующая двух образовавшихся сил будет равна нулю. Поэтому для запуска двигателя, имеющего такую конструкцию, требуется дополнительный толчок. Создать его можно, подключив конденсаторную схему пуска.
Подключить двигатель к однофазной цепи

Изготовленный для работы от трёхфазного источника питания электромотор может работать и от домашней однофазной сети, но при этом существенно снизятся его характеристики, такие как КПД, коэффициент мощности. Кроме того, снизятся мощность и пусковые показатели.
Если же без подключения не обойтись, то требуется из трёх обмоток статора собрать схему, где их будет только две. Одна рабочая, а другая пусковая. Например, есть три катушки с началами С1, С2, С3 и концами С4, С5, С6 соответственно. Для создания первой (рабочей) обмотки двигателя объединяем концы С5 и С6, а их начала С3 и С2 подключаем к источнику однофазного тока, например, бытовой сети 220 вольт. Роль второй, пусковой обмотки, будет выполнять оставшаяся незадействованная катушка стартера. Она подключается к источнику питания через конденсатор, соединённый с ней последовательно.
Параметры асинхронного двигателя
При подборе таких машин, а также при дальнейшей их эксплуатации необходимо учитывать характеристики асинхронного двигателя. Они бывают энергетические — это коэффициент полезного действия, коэффициент мощности. Важно учитывать и механические показатели. Основным из них считается зависимость между скоростью вращения вала и рабочим усилием, прикладываемым к нему. Существуют ещё пусковые характеристики. Они определяют пусковой, минимальный и максимальный моменты и их соотношение. Важно также знать, каков пусковой ток асинхронного двигателя. Для наиболее эффективного использования двигателя необходимо учитывать все эти параметры.
Нельзя оставить без внимания вопрос энергосбережения. В последнее время он рассматривается не только с позиции уменьшения эксплуатационных затрат. Экономичность электродвигателей снижает уровень экологических проблем, связанных с производством электроэнергии.
Перед производителями постоянно ставятся задачи разработки и выпуска энергосберегающих двигателей, повышения эксплуатационного ресурса, уменьшения шумового уровня.
Улучшить энергосберегающие показатели можно путём снижения потерь при эксплуатации. А они напрямую зависят от рабочей температуры машины. Кроме того, совершенствование этой характеристики неизбежно приведёт к увеличению срока эксплуатации двигателя.
Снизить температуру обмоток можно, применяя вентилятор наружного обдува, закреплённый на хвостовике вала ротора. Но это приводит к неизбежному повышению шума, производимого двигателем при работе. Особенно ощутим этот показатель при высокой скорости вращения ротора.
Таким образом, видно, что асинхронный двигатель имеет один существенный недостаток. Он не способен поддерживать постоянную частоту вращения вала при возрастающих нагрузках. Зато такой двигатель имеет множество преимуществ по сравнению с образцами электродвигателей других конструкций.
Во-первых, он имеет надёжную конструкцию. Работа асинхронного двигателя не вызывает никаких сложностей при его использовании.
Во-вторых, асинхронный двигатель экономичен в производстве и эксплуатации.
В-третьих, эта машина универсальна. Имеется возможность её использования в любых устройствах, которые не требуют точного поддержания частоты вращения вала якоря.
В-четвёртых, двигатель с асинхронным принципом действия востребован и в быту, получая питание только от одной фазы.
Учитывая то, что электроснабжение традиционно осуществляется путём доставки потребителям переменного тока, понятно стремление к созданию электромашин, работающих на поставляемой электроэнергии. В частности, переменный ток активно используется в асинхронных электродвигателях, нашедших широкое применение во многих областях деятельности человека. Особого внимания заслуживает асинхронный двигатель с короткозамкнутым ротором, который в силу ряда причин занял прочные позиции в применении.
Секрет такой популярности состоит, прежде всего, в простоте конструкции и дешевизне его изготовления. У электромоторов на короткозамкнутых роторах есть и другие преимущества, о которых вы узнаете из данной статьи. А для начала рассмотрим конструктивные особенности этого типа электрических двигателей.
Конструкция
В каждом электромоторе есть две важных рабочих детали: ротор и статор. Они заключены в защитный кожух. Для охлаждения проводников обмотки на валу ротора установлен вентилятор. Это общий принцип строения всех типов электродвигателей.
Конструкции статоров рассматриваемых электродвигателей ничем не отличаются от строения этих деталей в других типах электромоторов, работающих в сетях переменного тока. Сердечники статора, предназначенного для работы при трехфазном напряжении, располагаются по кругу под углом 120º. На них устанавливаются обмотки из изолированной медной проволоки определённого сечения, которые соединяются треугольником или звездой. Конструкция магнитопровода статора жёстко крепится на стенках цилиндрического корпуса.
Строение электродвигателя понятно из рисунка 1. Обратите внимание на конструкцию обмоток без сердечника в короткозамкнутом роторе.
 Рис. 1. Строение асинхронного двигателя с КЗ Ротором
Рис. 1. Строение асинхронного двигателя с КЗ РоторомНемного по-другому устроен ротор. Конструкция его обмотки очень похожа на беличью клетку. Она состоит из алюминиевых стержней, концы которых замыкают короткозамыкающие кольца. В двигателях большой мощности в качестве короткозамкнутых обмоток ротора можно увидеть применение медных стержней. У этого металла низкое удельное сопротивление, но он дороже алюминия. К тому же медь быстрее плавится, а это не желательно, так как вихревые токи могут сильно нагревать сердечник.
Конструктивно стержни расположены поверх сердечников ротора, которые состоят из трансформаторной стали. При изготовлении роторов сердечники монтируют на валу, а проводники обмотки впрессовывают (заливают) в пазы магнитопровода. При этом нет необходимости в изоляции пазов сердечника. На рисунке 2 показано фото ротора с КЗ обмотками.
 Рис. 2. Ротор асинхронного двигателя с КЗ обмотками
Рис. 2. Ротор асинхронного двигателя с КЗ обмоткамиПластины магнитопроводов таких роторов не требуют лаковой изоляции поверхностей. Они очень просты в изготовлении, что удешевляет себестоимость асинхронных электродвигателей, доля которых составляет до 90% от общего числа электромоторов.
Ротор асинхронно вращается внутри статора. Между этими деталями устанавливаются минимальные расстояния в виде воздушных зазоров. Оптимальный зазор находится в пределах от 0,5 мм до 2 мм.
В зависимости от количества используемых фаз асинхронные электродвигатели можно разделить на три типа:
Они отличаются количеством и расположением обмоток статора. Модели с трехфазными обмотками отличаются высокой стабильностью работы при номинальной нагрузке. У них лучшие пусковые характеристики. Зачастую такие электродвигатели используют простую схему пуска.
Двухфазные двигатели имеют две перпендикулярно расположенных обмотки статора, на каждую из которых поступает переменный ток. Их часто используют в однофазных сетях – одну обмотку подключают напрямую к фазе, а для питания второй применяют фазосдвигающий конденсатор. Без этой детали вращение вала асинхронного электродвигателя самостоятельно не начнётся. В связи с тем, что конденсатор является неотъемлемой частью двухфазного электромотора, такие двигатели ещё называют конденсаторными.
В конструкции однофазного электродвигателя используют только одну рабочую обмотку. Для запуска вращения ротора применяют пусковую катушку индуктивности, которую через конденсатор кратковременно подключают к сети, либо замыкают накоротко. Эти маломощные моторчики используются в качестве электрических приводов некоторых бытовых приборов.
Принцип работы
Функционирование асинхронного двигателя осуществляется на основе свойства трёхфазного тока, способного создавать в обмотках статора вращающее магнитное поле. В рассматриваемых электродвигателях синхронная частота вращения электромагнитного поля связана прямо пропорциональной зависимостью с собственной частотой переменного тока.
Существует обратно пропорциональная зависимость частоты вращения от количества пар полюсов в обмотках статора. Учитывая то, что сдвиг фаз составляет 60º, зависимость частоты вращения ротора (в об/мин.) можно выразить формулой:
n1 = (f1*60) / p, где n1 – синхронная частота, f1 – частота переменного тока, а p – количество пар полюсов.
В результате действия магнитной индукции на сердечник ротора, в нём возникнет ЭДС, которая, в свою очередь, вызывает появление электрического тока в замкнутом проводнике. Возникнет сила Ампера, под действием которой замкнутый контур начнёт вращение вдогонку за магнитным полем. В номинальном режиме работы частота вращения ротора немного отстаёт от скорости вращения создаваемого в статоре магнитного поля. При совпадении частот происходит прекращение магнитного потока, ток исчезает в обмотках ротора, вследствие чего прекращается действие силы. Как только скорость вращения вала отстанет, переменными токами магнитных полей, возобновляется действие амперовой силы.
Разницу частот вращения магнитных полей называют частотой скольжения: ns=n1–n2, а относительную величину s, характеризующую отставание, называют скольжением.
s = 100% * ( ns / n1) = 100% * (n1 — n2) / n1 , где ns – частота скольжения; n1, n2 – частоты вращений статорных и роторных магнитных полей соответственно.
С целью уменьшения гармоник ЭДС и сглаживания пульсаций момента силы, стержни короткозамкнутых витков немного скашивают. Взгляните ещё раз на рис. 2 и обратите внимание на расположение стержней, выполняющих роль обмоток ротора, относительно оси вращения.
Скольжение зависит от того, какую механическую нагрузку приложено к валу двигателя. В асинхронных электромоторах изменение параметров скольжения происходит в диапазоне от 0 до 1. Причём в режиме холостого хода набравший обороты ротор почти не испытывает активного сопротивления. S приближается к нулю.
Увеличение нагрузки способствует увеличению скольжения, которое может достигнуть единицы, в момент остановки двигателя из-за перегрузки. Такое состояние равносильно режиму короткого замыкания и может вывести устройство из строя.
Относительная величина отставания соответствующая номинальной нагрузке электрической машины называется номинальным скольжением. Для маломощных электромоторов и двигателей средней мощности этот показатель изменяется в небольших пределах – от 8% до 2%. При неподвижности ротора электродвигателя скольжение стремится к 0, а при работе на холостом ходу оно приближается к 100%.
Во время запуска электромотора его обмотки испытывают нагрузку, что приводит к резкому увеличению пусковых токов. При достижении номинальных мощностей электрические двигатели с короткозамкнутыми витками самостоятельно восстанавливают номинальную частоту ротора.
Обратите внимание на кривую крутящего момента скольжения, изображённую на рис. 3.
 Рис. 3. Кривая крутящего момента скольжения
Рис. 3. Кривая крутящего момента скольженияПри увеличении крутящего момента коэффициент s изменяется от 1 до 0 (см. отрезок «моторная область»). Возрастает также скорость вращения вала. Если скорость вращения вала превысит номинальную частоту, то крутящий момент станет отрицательным, а двигатель перейдёт в режим генерации (отрезок «генерирующая область»). В таком режиме ротор будет испытывать магнитное сопротивление, что приведёт к торможению мотора. Колебательный процесс будет повторяться, пока не стабилизируется крутящий момент, а скольжение не приблизится к номинальному значению.
Преимущества и недостатки
Повсеместное использование асинхронных двигателей с короткозамкнутыми роторами обусловлено их неоспоримыми преимуществами:
- стабильностью работы на оптимальных нагрузках;
- высокой надёжностью в эксплуатации;
- низкие эксплуатационные затраты;
- долговечностью функционирования без обслуживания;
- сравнительно высокими показателями КПД;
- невысокой стоимостью, по сравнению с моделями на основе фазных роторов и с другими типами электромоторов.
Из недостатков можно отметить:
- высокие пусковые токи;
- чувствительность к перепадам напряжений;
- низкие коэффициенты скольжений;
- необходимость в применении устройств, таких как преобразователи частоты, пусковые реостаты и др., для улучшения характеристик электромотора;
- ЭД с короткозамкнутым ротором нуждаются в дополнительных коммутационных управляющих устройствах, в случаях, когда возникает необходимость регулировать скорость.
Электродвигатели данного типа имеют приличную механическую характеристику. Несмотря на недостатки, они лидируют по показателям их применения.
Основные технические характеристики
В зависимости от класса электродвигателя, его технические характеристики меняются. В рамках данной статьи не ставится задача приведения параметров всех существующих классов двигателей. Мы остановимся на описании основных технических характеристик для электромоторов классов 56 А2 – 80 В2.
В этом небольшом промежутке на линейке моделей эелектромоторов с короткозамкнутыми роторами можно отметить следующее:
Мощность составляет от 0,18 кВт (класс 56 А2) до 2,2 кВт (класс 80 В2).
Ток при максимальном напряжении – от 0,55 А до 5А.
КПД от 66% до 83%.
Частота вращения вала для всех моделей из указанного промежутка составляет 3000 об./мин.
Технические характеристики конкретного двигателя указаны в его паспорте.
Подключение
Статорные обмотки трёхфазного АДКР можно подключать по схеме «треугольник» либо «звезда». При этом для звёздочки требуется напряжение выше, чем для треугольника.
Обратите внимание на то, что электродвигатель, подключенный разными способами к одной и той же сети, потребляет разную мощность. Поэтому нельзя подключать электромотор, рассчитанный на схему «звезда» по принципу треугольника. Но с целью уменьшения пусковых токов можно коммутировать на время пуска контакты звезды в треугольник, но тогда уменьшится и пусковой момент.
Схемы включения понятны из рисунка 4.
 Рис. 4. Схемы подключения
Рис. 4. Схемы подключенияДля подключения трёхфазного электрического двигателя к однофазному току применяют фазосдвигающие элементы: конденсаторы, резисторы. Примеры таких подключений смотрите на рисунке 5. Можно использовать как звезду, так и треугольник.
 Рис. 5. Примеры схем подключений в однофазную сеть
Рис. 5. Примеры схем подключений в однофазную сетьС целью управления работой двигателя в электрическую цепь статора подключаются дополнительные устройства.
8 марта 1889 года величайший русский учёный и инженер Михаил Осипович Доливо-Добровольский изобрёл трёхфазный асинхронный двигатель с короткозамкнутым ротором.
Современные трёхфазные асинхронные двигатели являются преобразователями электрической энергии в механическую. Благодаря своей простоте, низкой стоимости и высокой надёжности асинхронные двигатели получили широкое применение. Они присутствуют повсюду, это самый распространённый тип двигателей, их выпускается 90% от общего числа двигателей в мире. Асинхронный электродвигатель поистине совершил технический переворот во всей мировой промышленности.
Огромная популярность асинхронных двигателей связана с простотой их эксплуатации, дешивизной и надежностью.
Асинхронный двигатель — это асинхронная машина, предназначенная для преобразования электрической энергии переменного тока в механическую энергию. Само слово “асинхронный” означает не одновременный. При этом имеется ввиду, что у асинхронных двигателей частота вращения магнитного поля статора всегда больше частоты вращения ротора. Работают асинхронные двигатели, как понятно из определения, от сети переменного тока.
Устройство

На рисунке: 1 — вал, 2,6 — подшипники, 3,8 — подшипниковые щиты, 4 — лапы, 5 — кожух вентилятора, 7 — крыльчатка вентилятора, 9 — короткозамкнутый ротор, 10 — статор, 11 — коробка выводов.
Основными частями асинхронного двигателя являются статор (10) и ротор (9).
Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой.
Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор.
Короткозамкнутый ротор представляет собой сердечник, набранный из листов стали. В пазы этого сердечника заливается расплавленный алюминий, в результате чего образуются стержни, которые замыкаются накоротко торцевыми кольцами. Эта конструкция называется «беличьей клеткой». В двигателях большой мощности вместо алюминия может применяться медь. Беличья клетка представляет собой короткозамкнутую обмотку ротора, откуда собственно название.
Фазный ротор имеет трёхфазную обмотку, которая практически не отличается от обмотки статора. В большинстве случаев концы обмоток фазного ротора соединяются в звезду, а свободные концы подводятся к контактным кольцам. С помощью щёток, которые подключены к кольцам, в цепь обмотки ротора можно вводить добавочный резистор. Это нужно для того, чтобы можно было изменять активное сопротивление в цепи ротора, потому что это способствует уменьшению больших пусковых токов. Подробнее о фазном роторе можно прочитать в статье -асинхронный двигатель с фазным ротором.

Принцип работы
При подаче к обмотке статора напряжения, в каждой фазе создаётся магнитный поток, который изменяется с частотой подаваемого напряжения. Эти магнитные потоки сдвинуты относительно друг друга на 120°, как во времени, так и в пространстве. Результирующий магнитный поток оказывается при этом вращающимся.
Результирующий магнитный поток статора вращается и тем самым создаёт в проводниках ротора ЭДС. Так как обмотка ротора, имеет замкнутую электрическую цепь, в ней возникает ток, который в свою очередь взаимодействуя с магнитным потоком статора, создаёт пусковой момент двигателя, стремящийся повернуть ротор в направлении вращения магнитного поля статора. Когда он достигает значения, тормозного момента ротора, а затем превышает его, ротор начинает вращаться. При этом возникает так называемое скольжение.
Скольжение s — это величина, которая показывает, насколько синхронная частотаn1магнитного поля статора больше, чем частота вращения ротораn2, в процентном соотношении. 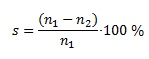
Скольжение это крайне важная величина. В начальный момент времени она равна единице, но по мере возрастания частоты вращения n2 ротора относительная разность частот n1-n2 становится меньше, вследствие чего уменьшаются ЭДС и ток в проводниках ротора, что влечёт за собой уменьшение вращающего момента. В режиме холостого хода, когда двигатель работает без нагрузки на валу, скольжение минимально, но с увеличением статического момента, оно возрастает до величины sкр—критического скольжения. Если двигатель превысит это значение, то может произойти так называемое опрокидывание двигателя, и привести в последствии к его нестабильной работе. Значения скольжения лежит в диапазоне от 0 до 1, для асинхронных двигателей общего назначения оно составляет в номинальном режиме — 1 — 8 %.
Как только наступит равновесие между электромагнитным моментом, вызывающим вращение ротора и тормозным моментом создаваемым нагрузкой на валу двигателя процессы изменения величин прекратятся.
Выходит, что принцип работы асинхронного двигателя заключается во взаимодействии вращающегося магнитного поля статора и токов, которые наводятся этим магнитным полем в роторе. Причём вращающий момент может возникнуть только в том случае, если существует разность частот вращения магнитных полей.
Однофазный асинхронный электродвигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель — это асинхронный электродвигатель, который работает от электрической сети однофазного переменного тока без использования частотного преобразователя и который в основном режиме работы (после пуска) использует только одну обмотку (фазу) статора.Конструкция однофазного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор — вращающаяся часть электродвигателя, статор — неподвижная часть электродвигателя, с помощью которого создается магнитное поле для вращения ротора.
Основные части однофазного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90° относительно друг друга. Основная обмотка называется главной (рабочей) и обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически является двухфазным, но так как рабочей является только одна обмотка, электродвигатель называют однофазным.
Ротор обычно представляет из себя короткозамкнутую обмотку, также из-за схожести называемой «беличьей клеткой». Медные или алюминиевые стержни которого с торцов замкнуты кольцами, а пространство между стержнями чаще всего заливается сплавом алюминия. Так же ротор однофазного двигателя может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.

Однофазный двигатель с вспомогательной обмоткой имеет 2 обмотки расположенные перпендикулярно относительно друг друга
Принцип работы однофазного асинхронного двигателя
Для того чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотки.

Проанализируем случай с двумя обмотками имеющими по оному витку
Рассмотрим случай когда в вспомогательной обмотки не течет ток. При включении главной обмотки статора в сеть, переменный ток, проходя по обмотке, создает пульсирующее магнитное поле, неподвижное в пространстве, но изменяющееся от +Фmах до -Фmах.
Запустить

Остановить

Пульсирующее магнитное поле
Если поместить ротор, имеющий начальное вращение, в пульсирующее магнитное поле, то он будет продолжать вращаться в том же направлении.
Чтобы понять принцип действия однофазного асинхронного двигателя разложим пульсирующее магнитное поле на два одинаковых круговых поля, имеющих амплитуду равную Фmах/2 и вращающихся в противоположные стороны с одинаковой частотой:
 ,
,
- где nпр – частота вращения магнитного поля в прямом направлении, об/мин,
- nобр – частота вращения магнитного поля в обратном направлении, об/мин,
- f1 – частота тока статора, Гц,
- p – количество пар полюсов,
- n1 – скорость вращения магнитного потока, об/мин
Запустить

Остановить

Разложение пульсирующего магнитного потока на два вращающихся
Действие пульсирующего поля на вращающийся ротор
Рассмотрим случай когда ротор, находящийся в пульсирующем магнитном потоке, имеет начальное вращение. Например, мы вручную раскрутили вал однофазного двигателя, одна обмотка которого подключена к сети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать вращающий момент, так как скольжение его ротора относительно прямого и обратного магнитного потока будет неодинаковым.
Будем считать, что прямой магнитный поток Фпр, вращается в направлении вращения ротора, а обратный магнитный поток Фобр — в противоположном направлении. Так как, частота вращения ротора n2 меньше частоты вращения магнитного потока n1, скольжение ротора относительно потока Фпр будет:
 ,
,
- где sпр – скольжение ротора относительно прямого магнитного потока,
- n2 – частота вращения ротора, об/мин,
- s – скольжение асинхронного двигателя

Прямой и обратный вращающиеся магнитные потоки вместо пульсирующего магнитного потока
Магнитный поток Фобр вращается встречно ротору, частота вращения ротора n2 относительно этого потока отрицательна, а скольжение ротора относительно Фобр
 ,
,
- где sобр – скольжение ротора относительно обратного магнитного потока
Запустить

Остановить

Вращающееся магнитное поле пронизывающее ротор

Ток индуцируемый в роторе переменным магнитным полем
Согласно закону электромагнитной индукции прямой Фпр и обратный Фобр магнитные потоки, создаваемые обмоткой статора, наводят в обмотке ротора ЭДС, которые соответственно создают в короткозамкнутом роторе токи I2пр и I2обр. При этом частота тока в роторе пропорциональна скольжению, следовательно:
 ,
,
- где f2пр – частота тока I2пр наводимого прямым магнитным потоком, Гц
 ,
,
- где f2обр – частота тока I2обр наводимого обратным магнитным потоком, Гц
Таким образом, при вращающемся роторе, электрический ток I2обр, наводимый обратным магнитным полем в обмотке ротора, имеет частоту f2обр, намного превышающую частоту f2пр тока ротора I2пр, наведенного прямым полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f1 = 50 Гц при n1 = 1500 и n2 = 1440 об/мин,скольжение ротора относительно прямого магнитного потока sпр = 0,04;
частота тока наводимого прямым магнитным потоком f2пр = 2 Гц;
скольжение ротора относительно обратного магнитного потока sобр = 1,96;
частота тока наводимого обратным магнитным потоком f2обр = 98 Гц

Согласно закону Ампера, в результате взаимодействия электрического тока I2пр с магнитным полем Фпр возникает вращающий момент
 ,
,
- где Mпр – магнитный момент создаваемый прямым магнитным потоком, Н∙м,
- сM — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I2обр, взаимодействуя с магнитным полем Фобр, создает тормозящий момент Мобр, направленный против вращения ротора, то есть встречно моменту Мпр:
 ,
,
- где Mобр – магнитный момент создаваемый обратным магнитным потоком, Н∙м
Результирующий вращающий момент, действующий на ротор однофазного асинхронного двигателя,
 ,
,
Справка: В следствие того, что во вращающемся роторе прямым и обратным магнитным полем будет наводиться ток разной частоты, моменты сил действующие на ротор в разных направлениях будут не равны. Поэтому ротор будет продолжать вращаться в пульсирующем магнитном поле в том направлении в котором он имел начальное вращение.
Тормозящее действие обратного поля
При работе однофазного двигателя в пределах номинальной нагрузки, то есть при небольших значениях скольжения s = sпр, крутящий момент создается в основном за счет момента Мпр. Тормозящее действие момента обратного поля Мобр — незначительно. Это связано с тем, что частота f2обр много больше частоты f2пр, следовательно, индуктивное сопротивление рассеяния обмотки ротора х2обр = x2sобр току I2обр намного больше его активного сопротивления. Поэтому ток I2обр, имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Фобр, значительно ослабляя его.
 ,
,
- где r2 — активное сопротивление стержней ротора, Ом,
- x2обр — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности невелик, то станет, ясно, почему Мобр в режиме нагрузки двигателя не оказывает значительного тормозящего действия на ротор однофазного двигателя.

С помощью одной фазы нельзя запустить ротор

Ротор имеющий начальное вращение будет продолжать вращаться в поле создаваемом однофазным статором
Действие пульсирующего поля на неподвижный ротор
При неподвижном роторе (n2 = 0) скольжение sпр = sобр = 1 и Мпр = Мобр, поэтому начальный пусковой момент однофазного асинхронного двигателя Мп = 0. Для создания пускового момента необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, нарушается равенство моментов Мпр и Мобр и результирующий электромагнитный момент приобретает некоторое значение  .
.
Пуск однофазного двигателя. Как создать начальное вращение?
Одним из способов создания пускового момента в однофазном асинхронном двигателе, является расположение вспомогательной (пусковой) обмотки B, смещенной в пространстве относительно главной (рабочей) обмотки A на угол 90 электрических градусов. Чтобы обмотки статора создавали вращающееся магнитное поле токи IA и IB в обмотках должны быть сдвинуты по фазе относительно друг друга. Для получения фазового сдвига между токами IA и IB в цепь вспомогательной (пусковой) обмотки В включают фазосмещающий элемент, в качестве которого используют активное сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор) [1].
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, пусковую обмотку В отключают. Отключение вспомогательной обмотки происходит либо автоматически с помощью центробежного выключателя, реле времени, токового или дифференциального реле, или же вручную с помощью кнопки.
Таким образом, во время пуска двигатель работает как двухфазный, а по окончании пуска — как однофазный.
Подключение однофазного двигателя
С пусковым сопротивлением
Двигатель с расщепленной фазой — однофазный асинхронный двигатель, имеющий на статоре вспомогательную первичную обмотку, смещенную относительно основной, и короткозамкнутый ротор [2].
Однофазный асинхронный двигатель с пусковым сопротивлением — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки отличается повышенным активным сопротивлением.

Омический сдвиг фаз, биффилярный способ намотки пусковой обмотки

Разное сопротивление и индуктивность обмоток
Для запуска однофазного двигателя можно использовать пусковой резистор, который последовательно подключается к пусковой обмотки. В этом случае можно добиться сдвига фаз в 30° между токами главной и вспомогательной обмотки, которого вполне достаточно для пуска двигателя. В двигателе с пусковым сопротивлением разность фаз объясняется разным комплексным сопротивлением цепей.
Также сдвиг фаз можно создать за счет использования пусковой обмотки с меньшей индуктивностью и более высоким сопротивлением. Для этого пусковая обмотка делается с меньшим количеством витков и с использованием более тонкого провода чем в главной обмотке.
Отечественной промышленностью изготавливается серия однофазных асинхронных электродвигателей с активным сопротивлением в качестве фазосдвигающего элемента серии АОЛБ мощностью от 18 до 600 Вт при синхронной частоте вращения 3000 и 1500 об/мин, предназначенных для включения в сеть напряжением 127, 220 или 380 В, частотой 50 Гц.
С конденсаторным пуском
Двигатель с конденсаторным пуском — двигатель с расщепленной фазой, у которого цепь вспомогательной обмотки с конденсатором включается только на время пуска.

Ёмкостной сдвиг фаз с пусковым конденсатором
Чтобы достичь максимального пускового момента требуется создать круговое вращающееся магнитное поле, для этого требуется чтобы токи в главной и вспомогательной обмотках были сдвинуты друг относительно друга на 90°. Использование в качестве фазосдвигающего элемента резистора или дросселя не позволяет обеспечить требуемый сдвиг фаз. Лишь включение конденсатора определенной емкости позволяет обеспечить фазовый сдвиг 90°.
Среди фазосдвигающих элементов, только конденсатор позволяет добиться наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели в цепь которых постоянно включен конденсатор используют для работы две фазы и называются — конденсаторными. Принцип действия этих двигателей основан на использовании вращающегося магнитного поля.
Двигатель с экранированными полюсами — двигатель с расщепленной фазой, у которого вспомогательная обмотка короткозамкнута.
Статор однофазного асинхронного двигателя с экранированными полюсами обычно имеет явно выраженные полюса. На явно выраженных полюсах статора намотаны катушки однофазной обмотки возбуждения. Каждый полюс статора разделен на две неравные части аксиальным пазом. Меньшую часть полюса охватывает короткозамкнутый виток. Ротор однофазного двигателя с экранированными полюсами — короткозамкнутый в виде «беличьей» клетки.
При включении однофазной обмотки статора в сеть в магнитопроводе двигателя создается пульсирующий магнитный поток. Одна часть которого проходит по неэкранированной Ф’, а другая Ф» — по экранированной части полюса. Поток Ф» наводит в короткозамкнутом витке ЭДС Ek, в результате чего возникает ток Ik отстающий от Ek по фазе из-за индуктивности витка. Ток Ik создает магнитный поток Фk, направленный встречно Ф», создавая результирующий поток в экранированной части полюса Фэ=Ф»+Фk. Таким образом, в двигателе потоки экранированной и неэкранированной частей полюса сдвинуты во времени на некоторый угол.
Пространственный и временной углы сдвига между потоками Фэ и Ф’ создают условия для возникновения в двигателе вращающегося эллиптического магнитного поля, так как Фэ ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя невысоки. КПД намного ниже, чем у конденсаторных двигателей такой же мощности, что связано со значительными электрическими потерями в короткозамкнутом витке.

Статор такого однофазного двигателя выполняется с ярко выраженными полюсами на не симметричном шихтованном сердечнике. Ротор — короткозамкнутый типа «беличья клетка».
Данный электродвигатель для работы не требует использования фазосдвигающих элементов. Недостатком данного двигателя является низкий КПД.
7.1.5 . Элементы конструкции асинхронного двигателя
Асинхронный двигатель конструктивно состоит из статора — неподвижная часть и ротор — вращающаяся часть.
Статор. Сердечник статора представляет из себя цилиндр, собранный из пластин электротехнической стали с пазами на внутренней стороне. В эти пазы уложены трехфазные обмотки, соединенные с сетью (Рис.7.9.).
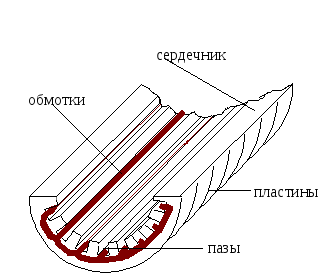
Рис.7.9.
Существует два типа ротора:
Беличья клетка (короткозамкнутый ротор). На рис. 7.10. и 7.11. представлены: сердечник ротора и короткозамкнутая обмотка.
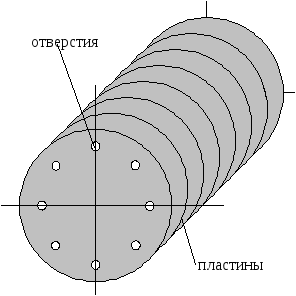
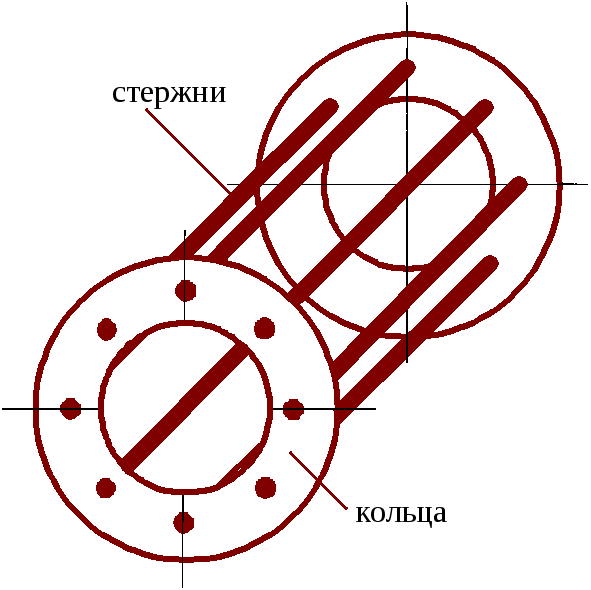
Рис.7.10. Рис.7.11.
На практике обмотка ротора отливается из алюминия в отверстия в пластинах сердечника, одновременно с этим отливаются элементы охлаждения двигателя (крылья).
Фазный ротор. Если вместо отверстий в пластинах сердечника сделать пазы, то в них может быть уложена трехфазная обмотка ротора, которая с помощью щеток и колец соединяется с внешней цепью. Как правило, это соединение «звезда» вместе с трехфазным реостатом.
7.1.6. Электродвижущие силы ротора и статора
Если вращающееся магнитное поле создает синусоидальный магнитный поток Фmp, то (аналогично трансформатору) имеем выражения для ЭДС статора E1 = 4,44 f1 N1 K1 Фmp, и ротора E2s = 4,44 f2 N2 K2 Фmp где: K1 ,K2 — обмоточные коэффициенты; N1 ,N2 — число витков обмоток; f1 — частота сети; f2 — частота роторных токов, зависящая от скольжения и частоты сети f2 = sf1.
В момент пуска двигателя, когда n = 0 и s = 1 ЭДС ротора будет
E2 = 4,44 f2 N2 K2 Фmp или E2s = s E2.
То есть ЭДС ротора зависит от скольжения.
Исходя из ранее сказанного, можно записать выражения для реактивных сопротивлений статора и ротора: X1 = 2 f1 L1 и X2s = 2 f2 L2.
Зная, что f2 = s f1 имеем X2s = s 2 f1 L2 и тогда для пуска двигателя получим X2 = 2 f1 L2. Итак реактивное сопротивление ротора также зависит от скольжения X2s=sX2.
7.1.7. Основные уравнения асинхронного двигателя
Аналогично трансформатору можно представить эквивалентные схемы ротора и статора (Рис.7.12. и 7.13.):
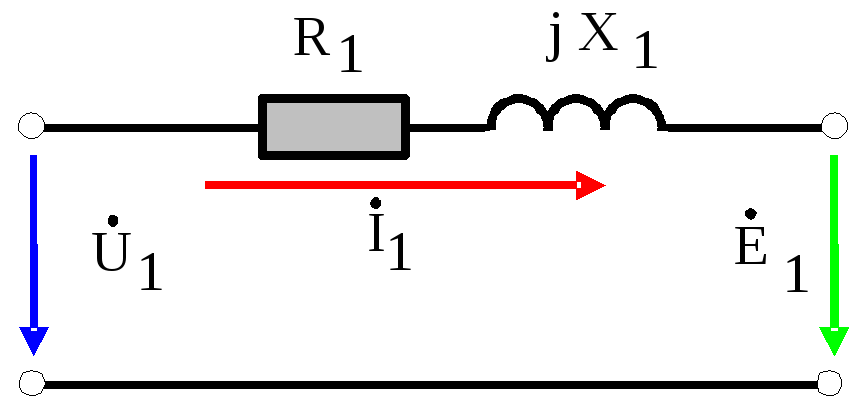
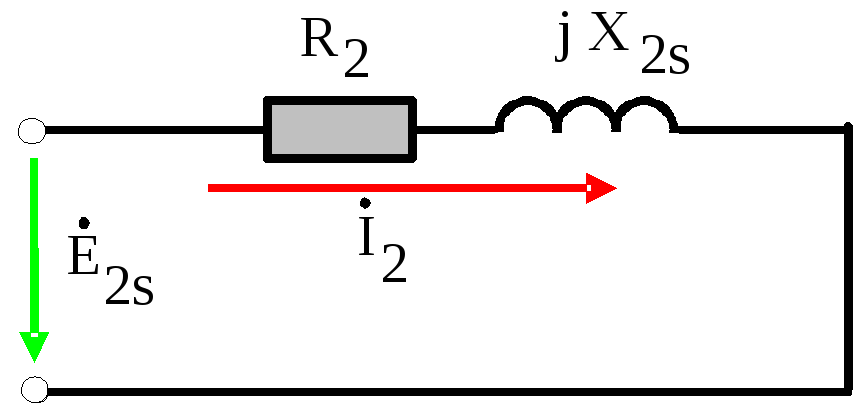
Рис.7.12. Рис.7.13.
Согласно II закону
Кирхгофа запишем уравнения соответствующие
данным схемам: 
где: U1 — напряжение сети; X1, R1 — реактивное и активное сопротивления статора; X2s, R2 — реактивное и активное сопротивления ротора; E1 ,E2s — ЭДС статора и ротора.
Для пуска двигателя
(s = 1) имеем: 
Когда ротор
вращается (0<s<1), первое уравнение
остается неизменным, а второе
трансформируется в:  откуда
откуда .
.
Подставляя в
уравнение следующее выражение  ,
получим
,
получим ,
где:
,
где: — эквивалентная нагрузка двигателя.
— эквивалентная нагрузка двигателя.
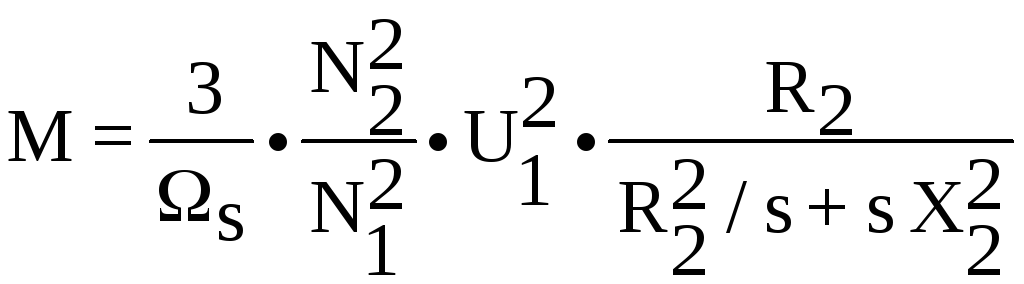
7.1.8. Вращающий момент
Активная электрическая
мощность трехфазного асинхронного
двигателя известна  ,.
,.
где два первых члена уравнения соответствуют электрическим потерям в статоре и роторе, а третий определяет электрическую мощность, которая преобразуется в механическую.
Согласно классической формуле механики имеем Pмех=M =Ms(1 — s),
где: M — механический момент [Н м]; — угловая скорость [рад/сек].
Приравнивая
электрическую и механическую мощности,
получим  =
Ms (1 — s), откуда формула момента будет
=
Ms (1 — s), откуда формула момента будет  .
.
Считая, что  аналогично трансформатору, выделим из
основных уравнений асинхронного
двигателя ток ротораI2 , исключая
при этом ЭДС E2 :
аналогично трансформатору, выделим из
основных уравнений асинхронного
двигателя ток ротораI2 , исключая
при этом ЭДС E2 : 
Пренебрегая
падениями напряжения I1R1 и I1X1 по сравнению с U1,
получим:  .
И тогда окончательно в действующих
значениях будем иметь:
.
И тогда окончательно в действующих
значениях будем иметь:
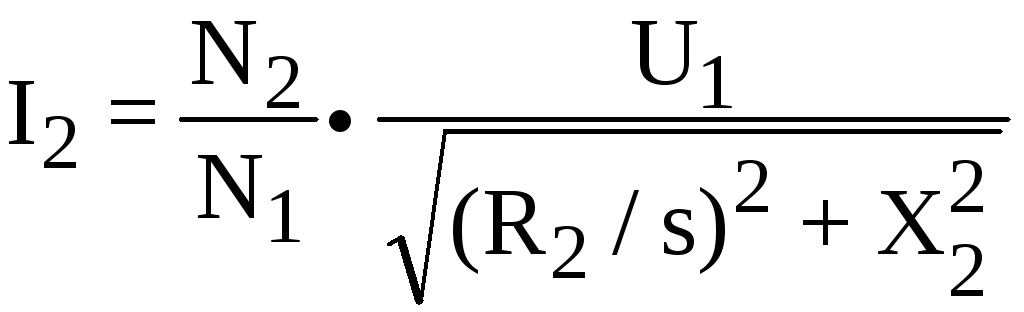
В результате выражение для вращающего момента будет иметь вид:
Устройство асинхронной машины — Студопедия
Конструктивные формы исполнения электрических машин.
Основные сведения о серийных асинхронных двигателях.
Режимы работы асинхронной машины.
Принцип действия асинхронной машины.
Устройство асинхронной машины.
СОДЕРЖАНИЕ
Лекция № 2
Навигационных комплексов
Иркутский филиал МГТУ ГА
Иркутск, 2007 г.
Асинхронные электрические машины
Электрические машины
ЛЕКЦИЯ № 9
И ПИЛОТАЖНО-НАВИГАЦИОННЫХ КОМПЛЕКСОВ
КАФЕДРА АВИАЦИОННЫХ ЭЛЕКТРОСИСТЕМ
ИРКУТСКИЙ ФИЛИАЛ
ГРАЖДАНСКОЙ АВИАЦИИ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
по дисциплине
для студентов специальности 160903
ТЕМА № 2
Кафедра Авиационных электросистем и пилотажно-
УТВЕРЖДАЮ
Заведующий кафедрой АЭС и ПНК
к.т.н., доцент Мишин С.В.
«14» марта 2008 г.
По дисциплине: Электрические машины
Тема лекции: Асинхронные электрические машины (2 часа)
ЛИТЕРАТУРА
1. Копылов Б.В. Электрические машины. М., 1988 г.
НАГЛЯДНЫЕ ПОСОБИЯ, ПРИЛОЖЕНИЯ, ТСО
1. Мультимедийная установка
Обсуждено на заседании кафедры
«14» марта 2008 г., протокол №8/07
Асинхронная машина состоит из двух основных частей, разделенных воздушным зазором: неподвижного статора и вращающегося ротора. Каждая из этих частей имеет сердечник и обмотку. При этом обмотка статора включается в сеть и является как бы первичной, а обмотка ротора — вторичной, так как энергия в нее поступает из обмотки статора за счет магнитной связи между этими обмотками.
По своей конструкции асинхронные двигатели разделяются на два вида: двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Рассмотрим устройство трехфазного асинхронного двигателя с короткозамкнутым ротором (рис.1). Двигатели этого вида имеют наиболее широкое применение.
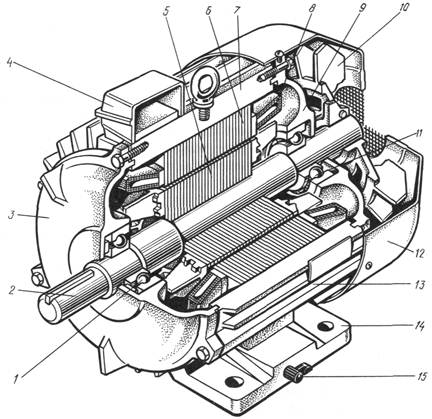
Рис.1. Устройство трехфазного асинхронного двигателя с короткозамкнутым ротором:
1, 11 — подшипники; 2 — вал; 3, 9 — подшипниковые щиты; 4 — коробка выводов; 5 — сердечник ротора с короткозамкнутой обмоткой; 6 — сердечник статора с обмоткой; 7 — корпус; 8 — обмотка статора; 10 — вентилятор; 12 — кожух вентилятора; 13 – наружная оребренная поверхность корпуса; 14 – лапы; 15 – болт заземления
Неподвижная часть двигателя — статор — состоит из корпуса 7 и сердечника 6 с трехфазной обмоткой 8. Корпус двигателя отливают из алюминиевого сплава или из чугуна либо делают сварным. Рассматриваемый двигатель имеет закрытое обдуваемое исполнение. Поэтому поверхность его корпуса имеет ряд продольных ребер, назначение которых состоит в том, чтобы увеличить поверхность охлаждения двигателя.
В корпусе расположен сердечник статора 6, имеющий шихтованную конструкцию: отштампованные листы из тонколистовой электротехнической стали толщиной обычно 0,5 мм покрыты слоем изоляционного лака, собраны в пакет и скреплены специальными скобами или продольными сварными швами по наружной поверхности пакета. Такая конструкция сердечника способствует значительному уменьшению вихревых токов, возникающих в процессе перемагничивания сердечника вращающимся магнитным полем. На внутренней поверхности сердечника статора имеются продольные пазы, в которых расположены пазовые части обмотки статора, соединенные в определенном порядке лобовыми частями, находящимися за пределами сердечника по его торцовым сторонам.
В расточке статора расположена вращающаяся часть двигателя — ротор, состоящий из вала 2 и сердечника 5 с короткозамкнутой обмоткой. Такая обмотка, называемая «беличье колесо», представляет собой ряд металлических (алюминиевых или медных) стержней, расположенных в пазах сердечника ротора, замкнутых с двух сторон короткозамыкающими кольцами (рис.2, а). Сердечник ротора также имеет шихтованную конструкцию, но листы ротора не покрыты изоляционным лаком, а имеют на своей поверхности тонкую пленку окисла. Это является достаточной изоляцией, ограничивающей вихревые токи, так как величина их невелика из-за малой частоты перемагничивания сердечника ротора. Например, при частоте сети 50 Гц и номинальном скольжении 6% частота перемагничивания сердечника ротора составляет 3 Гц.
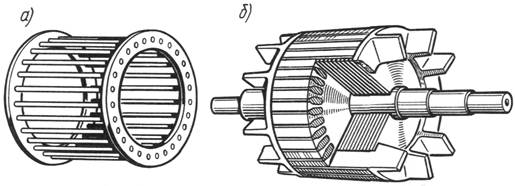
Рис.2. Короткозамкнутый ротор:
а – обмотка «беличья клетка»; б – ротор с обмоткой, выполненной литьем под давлением;
Короткозамкнутая обмотка ротора в большинстве двигателей выполняется заливкой собранного сердечника ротора расплавленным алюминиевым сплавом. При этом одновременно со стержнями обмотки отливаются короткозамыкающие кольца и вентиляционные лопатки (рис.2, б).
Вал ротора вращается в подшипниках качения 1 и 11, расположенных в подшипниковых щитах 3 и 9.
Охлаждение двигателя осуществляется методом обдува наружной оребренной поверхности корпуса 13. Поток воздуха создается центробежным вентилятором 10 прикрытым кожухом 12. На торцовой поверхности этого кожуха имеются отверстия для забора воздуха. Двигатели мощностью 15 кВт и более помимо закрытого делают еще и защищенного исполнения с внутренней самовентиляцией. В подшипниковых щитах этих двигателей имеются отверстия (жалюзи), через которые воздух посредством вентилятора прогоняется через внутреннюю полость двигателя. При этом воздух «омывает» нагретые части (обмотки, сердечники) двигателя и охлаждение получается более эффективным, чем при наружном обдуве.
Концы обмоток фаз выводят на зажимы коробки выводов 4. Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в  раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних (рис.3). В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних (рис.3). В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
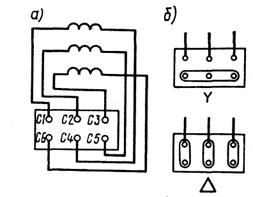
Рис.3. Расположение выводов обмотки статора (а) и положение перемычек
при соединении обмотки статора звездой и треугольником (б)
Монтаж двигателя в месте его установки осуществляется либо посредством лап 14 (см. рис.1), либо посредством фланца. В последнем случае на подшипниковом щите (обычно со стороны выступающего конца вала) делают фланец с отверстиями для крепления двигателя на рабочей машине. Для предохранения обслуживающего персонала от возможного поражения электрическим током двигатели снабжаются болтами заземления 15 (не менее двух). Принципиальная схема включения в трехфазную сеть асинхронного двигателя с короткозамкнутым ротором показана на рис.4, а.
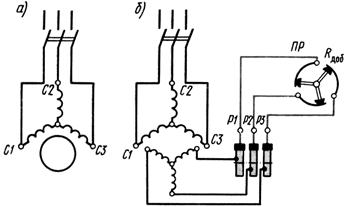
Рис.4. Принципиальные схемы включения трехфазных асинхронных двигателей с короткозамкнутым (а) и фазным (б) ротором
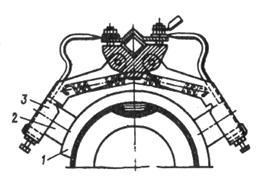
Другая разновидность трехфазных асинхронных двигателей — двигатели с фазным ротором — конструктивно отличается от рассмотренного двигателя главным образом устройством ротора (рис.5). Статор этого двигателя также состоит из корпуса 3 и сердечника 4 с трехфазной обмоткой. У него имеются подшипниковые щиты 2 и 6 с подшипниками качения 1 и 7. К корпусу 3 прикреплены лапы 10 и коробка выводов 9. Однако ротор имеет более сложную конструкцию. На валу 8 закреплен шихтованный сердечник 5с трехфазной обмоткой, выполненной аналогично обмотке статора. Эту обмотку соединяют звездой, а ее концы присоединяют к трем контактным кольцам 11, расположенным на валу и изолированным друг от друга и от вала. Для осуществления электрического контакта с обмоткой вращающегося ротора на каждое контактное кольцо 1 (рис.6) накладывают обычно две щетки 2, располагаемые в щеткодержателях 3. Каждый щеткодержатель снабжен пружинами, обеспечивающими прижатие щеток к контактному кольцу с определенным усилием.
Асинхронные двигатели с фазным ротором имеют более сложную конструкцию и менее надежны, но они обладают лучшими регулировочными и пусковыми свойствами, чем двигатели с короткозамкнутым ротором. Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рис.4, б. Обмотка ротора этого двигателя соединена с пусковым реостатом ПР, создающим в цепи ротора добавочное сопротивление Rдоб.
На корпусе асинхронного двигателя прикреплена табличка, на которой указаны тип двигателя, завод-изготовитель, год выпуска и номинальные данные (полезная мощность, напряжение, ток, коэффициент мощности, частота вращения и КПД).
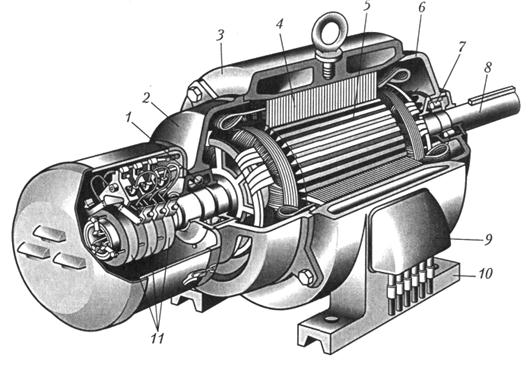
Рис.5. Устройство трехфазного асинхронного двигателя с фазным ротором:
1, 7 — подшипники; 2, 6 – подшипниковые щиты; 3 — корпус; 4 – сердечник статора с обмоткой; 5 – сердечник ротора; 8 — вал; 9 – коробка выводов; 10 — лапы; 11 – контактные кольца
Однофазный асинхронный двигатель
Дмитрий Левкин
Однофазный асинхронный электродвигатель представляет собой асинхронный электродвигатель, который работает от однофазной сети переменного тока без использования преобразователя частоты и который в базовом режиме работы (после запуска) использует только одну обмотку (фазу). статора.Сплитфазный двигатель — это однофазный асинхронный двигатель, имеющий вспомогательную (пусковую) обмотку на статоре, смещенную от основной, и короткозамкнутый ротор [2].
Конструкция однофазного асинхронного двигателя с вспомогательной или пусковой обмоткой
Основными компонентами любого электродвигателя являются ротор и статор. Ротор является вращающейся частью электродвигателя, статор является неподвижной частью электродвигателя, с помощью которого создается магнитное поле для вращения ротора.Основные части однофазного асинхронного двигателя: ротор и статор
Статор имеет две обмотки, расположенные под углом 90 ° относительно друг друга.Основная (рабочая) обмотка обычно занимает 2/3 пазов сердечника статора, другая обмотка называется вспомогательной (пусковой) и обычно занимает 1/3 пазов статора.
Двигатель фактически двухфазный, но поскольку после запуска работает только одна обмотка, электродвигатель называется однофазным.
Ротор обычно представляет собой короткозамкнутую обмотку, также называемую «короткозамкнутой клеткой» из-за сходства. Чьи медные или алюминиевые стержни закрыты кольцами на концах, а пространство между стержнями часто заполнено алюминиевым сплавом.Ротор однофазного двигателя также может быть выполнен в виде полого немагнитного или полого ферромагнитного цилиндра.
Однофазный асинхронный двигатель со вспомогательной обмоткой имеет две обмотки, расположенные перпендикулярно друг другу
Принцип работы однофазного асинхронного двигателя
Чтобы лучше понять работу однофазного асинхронного двигателя, давайте рассмотрим его только с одним витком в главной и вспомогательной обмотках.
Анализ корпуса с двумя обмотками, имеющими один оборот
Рассмотрим случай, когда ток не течет во вспомогательной обмотке.При включении основной обмотки статора переменный ток, проходящий через обмотку, создает пульсирующее магнитное поле, стационарное в пространстве, но колеблющееся от + Ф макс. до -Ф макс. .
Старт
Стоп
Колеблющееся магнитное поле
Если вы поместите короткозамкнутый ротор с начальным вращением в флуктуирующее магнитное поле, он продолжит вращаться в том же направлении.
Чтобы понять принцип работы однофазного асинхронного двигателя, мы разделяем флуктуирующее магнитное поле на два одинаковых вращающихся поля, имеющих амплитуду, равную Ф макс. /2 и вращающихся в противоположных направлениях с той же частотой:
,
- , где n f — скорость вращения магнитного поля в прямом направлении, об / мин,
- n r — скорость вращения магнитного поля в обратном направлении, об / мин,
- f 1 — частота тока статора, Гц,
- — число пар полюсов,
- n 1 — скорость вращения магнитного потока, об / мин
Старт
Стоп
Разложение флуктуирующего магнитного потока на два вращающихся
Действие флуктуирующего поля на вращающийся ротор
Рассмотрим случай, когда ротор в флуктуирующем магнитном потоке имеет начальное вращение.Например, мы вручную вращали вал однофазного двигателя, одна обмотка которого подключена к электросети переменного тока. В этом случае при определенных условиях двигатель будет продолжать развивать крутящий момент, поскольку скольжение ротора относительно прямого и обратного магнитного потока будет неравным.
Предположим, что прямой магнитный поток Ф f вращается в направлении вращения ротора, а обратный магнитный поток Ф r в противоположном направлении. Поскольку скорость вращения ротора n 2 меньше скорости вращения магнитного потока n 1 , то скольжение ротора относительно потока Ф f будет:
,
- , где s f — скольжение ротора относительно прямого магнитного потока,
- n 2 — частота вращения ротора,
- с асинхронным двигателем скольжения
Прямой и обратный вращающийся магнитный поток вместо флуктуирующего магнитного потока
Магнитный поток Ф r вращается против вращения ротора, скорость вращения ротора n 2 относительно этого потока отрицательна, а скольжение ротора относительно Ф r
,
- , где s r — скольжение ротора относительно обратного магнитного потока
Старт
Стоп
Вращающееся магнитное поле, пронизывающее ротор
Ток, индуцированный в роторе переменным магнитным полем
Согласно закону электромагнитной индукции, магнитные потоки прямого Ф f и обратного Ф r , генерируемые обмоткой статора, индуцируют ЭДС в обмотке ротора, которая, соответственно, в короткозамкнутом роторе генерирует токи I 2f. а я 2р .Частота тока в роторе пропорциональна скольжению, поэтому:
,
- , где f 2f — частота тока I 2f , индуцированного прямым магнитным потоком, Гц
,
- , где f 2r — частота тока I 2r , индуцированного обратным магнитным потоком, Гц
Таким образом, когда ротор вращается, электрический ток I 2r , индуцированный обратным магнитным полем в обмотке ротора, имеет частоту f 2r , значительно превышающую частоту f 2f индуцированного тока ротора I 2f передним полем.
Пример: для однофазного асинхронного двигателя, работающего от сети с частотой f 1 = 50 Гц при n 1 = 1500 и n 2 = 1440 об / мин, скольжение ротора относительно прямой магнитный поток s f = 0,04;
частота тока, индуцированного прямым магнитным потоком f 2f = 2 Гц;
проскальзывание ротора относительно обратного магнитного потока а с р = 1,96;
частота тока, индуцированного обратным магнитным потоком f 2r = 98 Гц
Согласно закону Ампера, крутящий момент возникает в результате взаимодействия электрического тока I 2f с магнитным полем F f
,
- , где M f — магнитный момент, создаваемый прямым магнитным потоком, Н ∙ м,
- с М — постоянный коэффициент, определяемый конструкцией двигателя
Электрический ток I 2r , взаимодействуя с магнитным полем Ф r , создает тормозной момент M r , направленный против вращения ротора, то есть в противоположность моменту M f :
,
- , где M r — магнитный крутящий момент, создаваемый обратным магнитным потоком, Н 900 м
Результирующий крутящий момент, действующий на ротор однофазного асинхронного двигателя,
,
Примечание: В связи с тем, что во вращающемся роторе прямое и обратное магнитное поле будет индуцировать ток различной частоты, крутящие моменты, действующие на ротор в разных направлениях, не будут одинаковыми.Следовательно, ротор будет продолжать вращаться в колеблющемся магнитном поле в направлении, в котором он имел начальное вращение.
Эффект торможения обратного поля
Когда однофазный двигатель работает в пределах номинальной нагрузки, то есть при малых значениях скольжения s = s f , крутящий момент создается в основном за счет крутящего момента M f . Эффект торможения от крутящего момента обратного поля M r незначительный. Это связано с тем, что частота f 2r намного выше частоты f 2f , поэтому индуктивное сопротивление обмотки ротора а х 2r = x 2 с r к току У меня 2р намного больше, чем у него активное сопротивление.Следовательно, ток I 2r , имеющий большую индуктивную составляющую, оказывает сильное размагничивающее действие на обратный магнитный поток Ф r , значительно ослабляя его.
,
- , где r 2 — сопротивление стержней ротора, Ом,
- x 2r — реактивное сопротивление стержней ротора, Ом.
Если учесть, что коэффициент мощности мал, то станет понятно, почему M r под нагрузкой двигателя не оказывает существенного тормозного воздействия на ротор однофазного двигателя.
При одной фазе ротор не может быть запущен.
Ротор, имеющий начальное вращение, будет продолжать вращаться в поле, создаваемом однофазным статором
Действие флуктуирующего поля на неподвижный ротор
При неподвижном роторе (n 2 = 0) скольжение s f = s r = 1 и M f = M r , поэтому начальный пусковой момент однофазного асинхронного двигателя M f = 0.Чтобы создать пусковой момент, необходимо привести ротор во вращение в ту или иную сторону. Тогда s ≠ 1, равенство моментов М f и М r нарушается, и результирующий электромагнитный момент приобретает некоторое значение M = M f — M r ≠ 0.
Запуск однофазного асинхронного двигателя. Как создать начальный поворот?
Одним из способов создания пускового крутящего момента в однофазном асинхронном двигателе является расположение вспомогательной (пусковой) обмотки B, которая смещена в пространстве относительно главной (рабочей) обмотки A под углом 90 электрических градусов.Для того чтобы обмотки статора создавали вращающееся магнитное поле, токи I A и I B в обмотках должны быть не в фазе относительно друг друга. Для получения фазового сдвига между токами I A и I B вспомогательная (пусковая) обмотка B соединена с фазосдвигающим элементом, который представляет собой сопротивление (резистор), индуктивность (дроссель) или емкость (конденсатор). [1].
После того, как ротор двигателя ускоряется до скорости вращения, близкой к постоянной, пусковая обмотка B отключается.Вспомогательная обмотка отключается либо автоматически с помощью центробежного переключателя, реле задержки времени, тока или дифференциального реле, либо вручную с помощью кнопки.
Таким образом, во время запуска однофазный асинхронный двигатель работает как двухфазный, а после запуска — как однофазный.
Подключение однофазного асинхронного двигателя
Сопротивление пуска асинхронного двигателя
Сопротивление пуска Асинхронный двигатель представляет собой двухфазный двигатель, в котором цепь вспомогательной обмотки отличается повышенным сопротивлением.
Омический фазовый сдвиг, бифилярная пусковая обмотка
Различное сопротивление и индуктивность обмоток
Для запуска однофазного асинхронного двигателя вы можете использовать пусковой резистор, который последовательно подключен к пусковой обмотке. В этом случае можно добиться сдвига фаз на 30 ° между токами главной и вспомогательной обмоток, чего вполне достаточно для запуска двигателя.В двигателе с пусковым сопротивлением разность фаз объясняется различным комплексным сопротивлением цепей.
Кроме того, фазовый сдвиг можно создать с помощью пусковой обмотки с меньшей индуктивностью и большим сопротивлением. Для этого пусковая обмотка выполняется с меньшим числом витков и с использованием более тонкой проволоки, чем в основной обмотке.
Пусковой конденсаторный асинхронный двигатель
Запуск конденсатора Асинхронный двигатель представляет собой двухфазный двигатель, в котором цепь вспомогательной обмотки с конденсатором включается только на время пуска.
Емкостный фазовый сдвиг с пусковым конденсатором
Для достижения максимального пускового крутящего момента требуется создать круговое вращающееся магнитное поле, для этого необходимо, чтобы токи в основной и вспомогательной обмотках были смещены относительно друг друга на 90 °. Использование резистора или дросселя в качестве элемента, сдвигающего фазу, не обеспечивает требуемого сдвига фаз. Только включение конденсатора определенной емкости позволяет сдвиг фазы на 90 °.
Среди фазосдвигающих элементов только конденсатор позволяет достичь наилучших пусковых свойств однофазного асинхронного электродвигателя.
Двигатели, в цепи которых постоянно включенный конденсатор, используют две фазы для работы и называются конденсаторными. Принцип работы этих двигателей основан на использовании вращающегося магнитного поля.
Асинхронный двигатель с заштрихованными полюсами представляет собой двухфазный двигатель, в котором вспомогательная обмотка замкнута накоротко.
Статор однофазного асинхронного двигателя с заштрихованными полюсами обычно имеет выступающие полюса. Каждый полюс статора разделен на две неравные секции осевой канавкой. Меньшая часть полюса имеет короткозамкнутый виток. Ротор однофазного двигателя с заштрихованными полюсами закорочен в виде короткозамкнутого сепаратора.
Когда однофазная обмотка статора включена в электрическую сеть, в магнитной цепи двигателя создается флуктуирующий магнитный поток.Одна часть которого проходит через незатененную Ф ‘, а другая Ф «вдоль затененного участка полюса. Поток Ф» вызывает короткое замыкание ЭДС E k , в результате чего ток I k отстает от E к в фазе из-за индуктивности катушки. Ток I к создает магнитный поток Ф к , направленный противоположно Ф «, создавая результирующий поток в затененном участке полюса Ф с = Ф» + Ф к . Таким образом, в двигателе потоки затененных и незатененных участков полюса смещаются во времени на определенный угол.
Пространственные и временные углы сдвига между потоками Ф с и Ф ‘создают условия для появления вращающегося эллиптического магнитного поля в двигателе, начиная с Ф с ≠ Ф’.
Пусковые и рабочие свойства рассматриваемого двигателя низкие. КПД намного ниже, чем у асинхронных двигателей с пусковым конденсатором той же мощности, что связано со значительными электрическими потерями в короткозамкнутой катушке.
Статор такого однофазного двигателя выполнен с выступающими полюсами на несимметричном многослойном сердечнике.Ротор имеет короткозамкнутую обмотку.
Этот двигатель для работы не требует использования фазосдвигающих элементов. Недостатком этого мотора является низкий КПД.
Также прочитайте
.Метод конечных элементов Магнит: InductionMotorExample
Дэвид Микер
20 августа 2004 г.
Введение
Часто задаваемый вопрос о FEMM: «Как вы проанализировать асинхронный двигатель? » В общем-то, хотелось бы использовать программу для моделирования производительности индукции машина на скорости и под нагрузкой. Однако в настоящее время все анализы в FEMM являются механически статичными. конфигурации.Вместо того, чтобы моделировать поведение машины напрямую, нужно определить производительность на скорости и нагрузке через серию симуляций статических конфигураций.
Индукционная машина с подвижным ротором, которая может быть смоделирована используя относительно простую модель схемы. Цель статического анализа FEMM состоит в том, чтобы идентифицировать параметры в модели схемы. это Тогда модель схемы может использоваться в самых разных условиях (например, , например, ). даже переходные симуляции). Хотя Параметры схемы часто могут быть аппроксимированы выражениями в замкнутой форме в явные термины геометрии двигателя, точка определения этих параметров с помощью анализа методом конечных элементов, чтобы проверить аппроксимации и упрощения, которые неизбежно должны быть сделаны при выводе аналитические расчетные формулы.
Цель этого примера — продемонстрировать в относительно шаг за шагом, как идти о создании и идентификации модель индукционной машины с использованием FEMM. В этом примере будет рассмотрен двигатель 220 В, 50 Гц, 2 л.с.
Файлы, упомянутые в этой статье, доступны здесь.
Асинхронный двигатель Модель
Подходящая модель асинхронного двигателя должна сначала определенные до того, как параметры в этой модели могут быть выведены.Разумный Предполагаемая модель может быть той, что изображена на рисунке 1. Эта модель предназначена для представления одной фазы индукционной машины, работающей в устойчивом состоянии (т.е. , то есть при постоянном электрическая частота и постоянная механическая скорость). В этой модели все утечки сосредоточены на сторона статора цепи в индуктивности L l . Муфта к ротор и токи на роторе представлены параллельными путями через индуктор М , представляющий индуктивность магнитного цепь, соединяющая ротор и статор и через резистор R R , представляющих работу, рассеиваемую в виде тепла в роторе и доставляемую нагрузке в виде механическая сила.В этой схеме уравнение, V представляет фазное напряжение , действующее среднеквадратичное напряжение на каждой фазе машины, и I представляет фазовый ток , среднеквадратичное значение тока через каждую фазу машины. Это важно различия, потому что в зависимости от того, как двигатель подключен (т. е. , т. е. или треугольник), линейное напряжение может или не может быть равным фазному напряжению, и ток в линии может или не может быть равен фазному току.Чтобы устранить любую двусмысленность, эта записка будет иметь дело с моделью, представленной исключительно с точки зрения фазного тока и фазы напряжение.
Рисунок 1: Простая стационарная индукция фазы модель двигателя.
Символ ω представляет приложенную электрическую частоту (в радиан / сек). Символ ω с представляет собой разницу между механическая частота ротора и его электрическая частота. Если статор построен с р пары полюсов, мы можем определить частоту скольжения ω с в терминах электрической частоты и механической частоты вращения ротора ω r как:
Теперь, когда у нас есть модель двигателя, мы можем использовать эту модель получить некоторые полезные отношения между фазным током, фазным напряжением и крутящий момент.
Моторное сопротивление
Сопротивление двигателя может быть добавлены вместе так же, как резисторы, используя те же правила для параллельные и последовательные конфигурации. В В этом случае полное сопротивление двигателя может быть представлено Z , где:
, где τ — постоянная времени ротора, M / R r .
Напряжение связано с током через:
фазовая связь потока
результат, который будет полезно позже в примечании является связь потока любого конкретного фаза.Можно отметить, что второй Член в импедансе умножается на j ω , что означает, что это вклад напряжения, который имеет отношение к изменению потока при частота ω . Тогда мы можем подразумевать, что поток Φ , связывание любой фазы:
Делив на ток, мы можем получить квитанцию частотно-зависимая индуктивность. это Результат может быть разделен на реальные и сложные компоненты как:
(1)
Зависимость этой индуктивности от частоты скольжения обеспечивает нам с механизмом, который мы позже будем использовать для определения параметров двигателя.Поскольку связь потока легко рассчитать и может быть получен с высокой точностью в реализации FEMM, затем можно использовать расчеты связи потока на разных частотах скольжения для сравнения с (1) по идентифицируют M , L l и R r параметры мотора.
Крутящий моменткак функция тока
Так как пример — двигатель, в конечном счете, с генерацией крутящего момента. Крутящий момент может быть подразумевается непосредственно от модели схемы.Рассмотрим, ссылаясь на рисунок 1, мощность, которая рассеивается в кажущееся «сопротивление» ротора:
Умножение на три, потому что это трехфазный машина, и мы заинтересованы в общей мощности ротора в машине. Предполагается также, что и р является среднеквадратичным током. Ротор может разложить на две отдельные потери: резистивные потери в роторе и поставленная механическая мощность:
, где первый член представляет механическую силу, а второй представляет потери ротора.Если мы переписать числитель механической силы с точки зрения механической скорости (используя предыдущее определение частоты скольжения), получаем:
Наконец, отметив, что механическая сила является продуктом крутящий момент и механическую скорость, мы просто делим на ω r , чтобы получить крутящий момент Т :
Хотя это совершенно правильное выражение для крутящего момента, оно в терминах тока ротора, а не тока фазы.С помощью еще нескольких шагов результат крутящего момента может быть записано в терминах фазного тока. Уравнение петли напряжения вокруг ротора:
Решив
по току ротора, получим:
, если мы заметим, что общий ток является суммой токи намагничивания и ротора:
мы можем решить, чтобы получить:
Принимая величины и р и Подстановка в выражение крутящего момента дает:
Если ток поддерживается постоянным и частота скольжения изменяется, кривая, показанная на рисунке 2 получена.Пиковый крутящий момент возникает при τω с = 1.
Рисунок 2: Кривая постоянного тока скольжения.
Теперь, когда параметры двигателя определены, мы может вывести силу на машину из этих параметров и операционной условия (ток и частота скольжения).
Идентификация параметров модели с помощью анализа методом конечных элементов
Формулы, разработанные выше, могут быть использованы в качестве основы для конечно-элементная идентификация параметров двигателя.Используя FEMM, ротор не двигается; Однако это не представляет Особая проблема, касающаяся идентификации параметров. В случае нулевой скорости частота скольжения просто вырождается до ω с = & omega.
Подход к анализу
На основании вышеизложенного есть как минимум две альтернативы подходы, которым можно следовать. Возможно, самый очевидный метод — это идентификация базовых параметров результаты крутящего момента анализируются с использованием постоянного тока статора в диапазоне частоты.
В качестве альтернативы можно попытаться приспособиться к индуктивности полученные результаты. Внутренне, программа получает связь потока, выполняя объемный интеграл, который тесно связан с вычисленная запасенная энергия, величина, которую FEMM вычисляет с высоким точность. Поэтому ожидается, что результаты этого расчета будут более точнее, чем расчеты крутящего момента. Для По этой причине подгонка к индуктивности будет рассмотрена в этой статье.
Подход тогда:
- К сформулировать конечно-элементную модель интересующего двигателя
- Применить 3-фазные токи для модели обмоток статора в диапазоне частот.(Не нужно беспокоиться о значениях токов ротора — программа вычисляет их сам, потому что токи ротора индуцированы вихревыми токами)
- для В каждом анализе оцените связь потока одной фазы, чтобы получить информация, которая требуется для соответствия параметрам в модели схемы.
- Выполнить регрессионный анализ для получения значений параметров.
Каждый из этих этапов теперь будет подробно описан с использованием конкретная геометрия двигателя в качестве примера.
Формула модели конечного элемента
Особый интересный двигатель рассчитан на 2 л.с. двигатель работает от сети 220 В среднеквадратичное значение , трехфазное питание 50 Гц. Этот двигатель представляет собой 4-полюсную машину (, то есть , р = 2), что подразумевает, что он будет работать на скорости чуть менее 1500 об / мин. Конфигурация обмотки для одного полюса машины изображена ниже на рисунке 3. Есть в общей сложности 36 пазов на статоре и 28 пазов на роторе.В каждом слоте находится 44 витка (, то есть , так что фазный ток в 1 А будет помещать всего 44 Ампер * Обороты в слот). Диаметр ротора составляет 80 мм, а Зазор между ротором и статором составляет 0,375 мм. Длина машины в направлении страницы составляет 100 мм. Подробные размеры по другим аспектам машины можно почерпнуть из Файл CAD, 2horse.dxf.
Рисунок 3: Пример обмотки асинхронного двигателя конфигурации.
Этот двигатель предназначен для подключения фаз в дельта-конфигурация.В дельте конфигурации, амплитуда фазового напряжения равна напряжению между линиями амплитуда, но амплитуда тока фазы равна 1 / sqrt (3) линии амплитуда тока (, то есть фазовая амплитуда тока составляет примерно 60% амплитуда тока в линии).
Модель этой геометрии содержится во входном файле 2horse.fem. Есть ряд Важные вопросы, касающиеся этой геометрии:
- В связи с Из соображений симметрии моделируется только ¼ машины.Чтобы сделать действительную ¼ модель, анти-периодическая граничные условия используются, чтобы связать край в с краем в = 90 o . Каждое антипериодическое граничное условие может использоваться только для соединения одной пары сегментов. Поскольку существует четыре пары сегментов, которые должны быть связаны, четыре антипериодические граничные условия должны быть определены.
- Только
- В модели используются линейные материалы. Приведенный выше подход предполагает, что импеданс не является функцией амплитуды тока, г.е. при условии линейных материалов. Следует отметить, что хотя Предположение о линейных материалах подходит для многих асинхронных двигателей модели, линейные материалы не могут быть использованы для моделирования машин с закрытыми геометрия ротора, потому что эти машины полагаются на насыщенность секция между пазами для ограничения потока утечки до допустимых уровней. Если это насыщение не моделируется, нефизические результаты получены для геометрии с прорезями. Хотя FEMM может моделировать нелинейно проблемы гармоник времени и подходит для анализа замкнутого интервала машины, подход анализа немного отличается от описанного в эта заметка.
- для В настоящих целях идентификации предполагается, что утюг статора имеет нулевая электропроводность (т. е. т. е. . вихревые токи в утюге пренебрегли.)
- стержни ротора смоделированы как марка алюминия с проводимостью 34,45 Масс-спектр / м. Это соответствует 1100 алюминий при комнатной температуре. Позже это сопротивление может быть скорректировано для фактической работы температура, предполагая, что сопротивление масштабируется пропорционально сопротивление алюминия.
Скрипт Lua, 2horse.lua, Теперь можно запустить, чтобы оценить индуктивность одной из фаз в двигателе по сравнению с частотой скольжения. Индуктивность довольно просто оценить. Mo_getcircuitproperties Команда возвращает связь потока указанной фазы. Индуктивность может быть получена путем деления потока связь по фазе тока.
Частота, Гц | Real Индуктивность | Воображаемый Индуктивность |
0.25 | 0,3113897 | -0,078562 |
0,5 | 0,2644535 | -0,130207 |
0,75 | 0,2126343 | -0,15379 |
1 | 0,1683203 | -0.158362 |
1,25 | 0,1342043 | -0,15323 |
1,5 | 0.1088912 | -0,144139 |
1,75 | 0,07 | -0,13398 |
2 | 0.076302 | -0.124052 |
2,25 | 0,0657982 | -0.114864 |
2,5 | 0,057736 | -0,106568 |
2,75 | 0,0514475 | -0.099154 |
3 | 0,0464669 | -0,092553 |
Таблица 1: Результаты индуктивности из сценария Луа.
Регрессия параметров двигателя по результатам индуктивности
Регрессия параметров из результатов индуктивности может быть поставленной как линейная задача подбора параметров. Во-первых, можно рассмотреть мнимую часть индуктивности результаты:
Если мы определим:
мы можем переустроить, чтобы получить:
Это уравнение является линейным по параметрам c 1 и с 2 .На каждом ряду в таблице, & омега с и L и указаны, образуя в общей сложности 12 уравнений (потому что мы оценили результаты на 12 частотах) для двух неизвестных. Подход наименьших квадратов затем используется для выбора Значения коэффициентов, которые наилучшим образом удовлетворяют всем 12 уравнениям.
Для подгонки наименьших квадратов построите матрицу м и вектор б :
, где ω с, k и L i, k представляют k th точек данных для частоты скольжения и мнимой компонент индуктивности.Также обратите внимание, что частота скольжения должна быть переведена в радианы в секунду, чтобы выйдите правильно (, то есть умножьте частоту в Гц на 2π). Решаемая проблема может быть представлены матричными уравнениями:
Решение наименьших квадратов к этому переопределено проблема:
Обратите внимание, что поскольку матрица, подлежащая инверсии, является только 2 на 2 матрица, для решения этой проблемы не требуется «тяжелый подъем».
Например, результаты: c 1 = 0,0522906 и с 2 = 0,0271847. Из определений c 1 и c 2 тогда мы можем подразумевать, что:
М = 0,317148 Н
τ = 0,164878 сек
График подгонки мнимой части индуктивности показано на рисунке 4. Подгонка очень хорошо, подразумевая, что простая модель, которую мы приняли для индукции Машина в порядке для настоящих целей.
Рисунок 4: Подгонка воображаемой кривой индуктивности к конечной элемент «точки данных».
Индуктивность рассеяния можно определить с помощью аналогичного Метод с использованием действительной части индуктивности. Действительная часть индуктивности:
Однако теперь у нас есть значения τ и M как ω с и L r . Мы можем сделать то же самое сортировка методом наименьших квадратов для определения индуктивности рассеяния L l .Однако на этот раз лучше всего подойдет л, л, — это просто среднее значение л л , которое подразумевается каждым данные указывают через:
В этом случае результат равен л л = 0,0158 H.
В качестве альтернативы можно выполнить нелинейную оптимизацию для напрямую минимизирует ошибку во всех уравнениях одновременно. Если это сделано, получаются результаты, которые похожи на вышеупомянутый двухэтапный подход.
М = 0,316428 Н
<τ = 0,165258 с
L l = 0,0162968 H
Оба подхода к регрессии параметров показаны в Блокнот Mathematica, fit.nb
Сравнение крутящего момента от тензора напряжения и модели цепи
Выше мы получили выражение для крутящего момента:
, где и — среднеквадратичное значение тока фазы. Если наша модель хороша, мы должны быть возможность сравнивать предсказания крутящего момента с «измерениями» крутящего момента на роторе вычисляется с помощью весового интегрального тензора блока.Чтобы сделать это сравнение, крутящий момент был оценивается через тензор напряжений для тока 1 А рк при ряде разные частоты скольжения. Крутящий момент Затем был рассчитан с использованием параметров двигателя, полученных с помощью метода нелинейной подгонки.
Сравнение крутящего момента, предсказанного по цепи Модель и результаты тензора напряжений показаны ниже на рисунке 6. Согласие в этом случае очень хорошее.
Рисунок 6: Сравнение между тензором напряжений и цепью Модель силы прогнозов.
Определение рабочей точки
В предыдущем разделе мы определили некоторые параметры, которые может использоваться в уравнении цепи на рисунке 1. Однако нельзя просто сбросить числа, которые были идентифицируется из 2D модели конечных элементов в уравнение и ожидать их обеспечить хорошее соответствие экспериментальным измерениям реального двигателя. Несколько факторов в игре:
- Увеличение в сопротивлении ротора из-за повышения температуры .Как правило, резистивные потери будут нагревать ротор до температуры, которая значительно выше комнатной температура. Увеличение Удельное сопротивление алюминия составляет около 40% на каждые 100 ° С. Номинальная рабочая температура может быть, например, 80C, что означает увеличение сопротивления на 24%. Как правило, можно просто масштабировать сопротивление ротора, определенное из анализа методом конечных элементов с использованием помещения температурные свойства с удельным сопротивлением. Однако определение фактической рабочей температуры может подразумевать решение тепловой проблемы (которая связана с электрической конструкции проблема).Следует отметить, что это имеет потенциал быть сложным — для наших целей мы просто предположим, температура как разумная рабочая точка.
- Увеличение в сопротивлении ротора из-за концевых стержней . Электрические цепи на роторе должны быть завершены в стержнях и концы ротора. это часть пути электрической цепи может существенно увеличить сопротивление, особенно в машинах с коротким в осевом направлении. Если геометрия этих концевых стержней известна, обычно можно рассчитать ток, который должен быть перенесен в любой данный сечение конца баров.Из подразумеваемые потери, можно отрегулировать сопротивление ротора с учетом эта дополнительная длина в цепи пути.
- Flux утечка из ротора заканчивается. Концевые стержни также вызывают некоторые дополнительные утечка флюса с торцов машины. Это может быть довольно сложно рассчитать — иногда люди будут делать специализированный 2D анализ конечных элементов концов в попытке получить оценка этих потерь. это утечка проблематична, потому что она влияет на отношения между ток и сила, которые будут выведены из 2D конечного элемента анализ.Когда каждый переделывает проблема в виде схемы на рисунке 1 (в котором все утечка сосредоточена на стороне статора), утечка ротора делает взаимное индуктивность М представляется меньшей, а утечка статора л л кажется, больше.
- Flux утечка с торцевых оборотов статора. Существует аналогичный эффект с концевыми витками обмоток статора. Некоторые дополнительные результаты утечки флюса от потока, который связывает конечные повороты через пути потока, которые не являются включены в 2D-модель.это утечка не влияет на отношения между током и силой, которые будет подразумеваться 2D-моделью конечных элементов. Тем не менее, эта утечка подразумевает, что больше напряжения будет требуется для получения заданного тока на заданной частоте.
- Core Потери . Значительное количество энергии рассеивается как потери в сердечнике из-за вихревых токов и гистерезиса в железе. Если бы мы были более полными, достойная модель этих потери могут быть включены путем размещения дополнительного резистора параллельно с взаимная индуктивность М для представления потерь на вихревые токи.Потери гистерезиса могут быть представлены через комплексный М . Гистерезисные потери затем относятся к сложной части М :
Правильный вихретоковый резистор и мнимая часть для М может быть определена расширенной версией Подход импеданса, который был представлен.
- Windage и потери на трение. Это механические потери, которые также проявляются как дополнительная мощность, которая должна в конечном итоге выйти из терминалов.
Часто один имеет указанное напряжение на клеммах, и один нравится определять механическую скорость, ток статора, КПД и т. д., что связаны с поддержкой определенного механического выхода. Чтобы получить реалистичную оценку этих количества, вышеупомянутые неидеальности должны быть приняты во внимание.
Рабочий лист Mathcad 7 для компоновки operatingpoint.mcd предназначен для того, чтобы показать, как можно некоторые из этих вопросов, чтобы определить и операционную точку, в сочетание с результатами, полученными из параметра конечного элемента идентификация.
Выводы
В общем, в проектирование и моделирование асинхронных машин. Этот настоящий документ только царапает поверхность моделирования асинхронного двигателя. Среди вопросов, которые были проигнорированы в текущем анализе являются:
- А конструктивная особенность, которая является общей в конструкции асинхронного двигателя, но не рассматривается в настоящий анализ является перекосом ротора. Причина этого перекоса заключается в том, что роторные стержни видят флюсовую связь это имеет менее гармоничное содержание.
- Гармоник Эффекты игнорируются в неподвижном анализе. Высшие гармоники могут создавать силы (и потери), которые не предвидится простой моделью, представленной здесь.
- «Глубокий барные роторы. Поправляться поведение пускового момента, многие асинхронные двигатели разработаны с сложные (, например, двухслойные) роторные стержневые топологии. Они не очень хорошо смоделированы схема, которая была представлена здесь. Сеть дополнительных индукторов и резисторов на ветви ротора схемы требуется для моделирования этих стержней.Подобный подход подбора импедансов может быть использован для определить значения для импедансов в такой модели сети.
- Нелинейный материалы. Как правило, индукция Двигатели предназначены для работы почти до насыщения. Некоторые конструкции асинхронных двигателей имеют закрытые пазы ротора (для уменьшить гармоническое содержание потока в зазоре), который должен насыщать так, чтобы Поток утечки не чрезмерен.
Идентификация параметров модели индукции из конечных элементный анализ не был забыт в литературе.Хороший пример:
Д. Долинар и др., «Расчет двухосной индукции Параметры модели двигателя с использованием конечных элементов », IEEE Сделки по энергии Преобразование, 12 (2): 133-142, июнь 1997.
Полный текст этого документа доступен через Интернет по адресу:
https://web.archive.org/web/20130810051118/http://www.esat.kuleuven.be:80/electa/publications/fulltexts/pub_131.pdf
Бумага Dolinar также содержит отличную библиографию работа других авторов в области идентификации параметров модели из анализа методом конечных элементов.
для версии этого примера, сопоставленной с другим программным обеспечением.
Запуск асинхронного двигателя и расчет потерь
Запуск асинхронного двигателя
Основные цели при запуске асинхронного двигателя:
- Для обработки пускового тока
- Для достижения высокого пускового момента.
Как мы знаем, сопротивление ротора определяет пусковой момент. Обычно это сопротивление ротора мало, что дает небольшой пусковой момент, но хорошие условия работы. Таким образом, короткозамкнутый двигатель может работать только при низких пусковых нагрузках.
 Расчет запуска и потерь асинхронного двигателя
Расчет запуска и потерь асинхронного двигателяЕсли сопротивление ротора каким-либо образом увеличено, то скольжение и скорость, при которых возникает максимальный крутящий момент, могут быть смещены. Для этой цели в цепь ротора может быть введено внешнее сопротивление, что происходит в случае двигателей с контактным кольцом или с намотанным ротором.
При подаче питания на неподвижный ротор излишний ток начнет течь .
Это происходит из-за того, что между обмоткой статора и обмоткой ротора действует трансформатор, а проводники ротора замкнуты накоротко.Это вызывает сильный ток, протекающий через ротор. Если для уменьшения этого сильного пускового тока приложенное пусковое напряжение уменьшается, то это также влияет на пусковой крутящий момент.
Методы запуска двигателя
Чтобы получить все, обычно используется следующий метод запуска:
- DOL начиная с
- Авто трансформатор пусковой
- Звездно-дельта старт.
Расчет потерь
Ниже приведены потери в асинхронном двигателе:
- Потери в сердечнике статора и ротора
- Статор и ротор медные потери
- Потеря трения и ветра.
Потери в сердечнике происходят из-за основного потока и потоков утечки. Поскольку напряжение предполагается постоянным, потери в сердечнике также могут быть аппроксимированы как постоянные. DC может измерить сопротивление статора. Гистерезис и потеря вихревых токов в проводниках увеличивают сопротивление, а эффективное сопротивление берется в 1,2 раза больше сопротивления постоянного тока.
Потери меди в роторе рассчитываются путем вычитания потерь в меди статора из общей измеренной потери или потерь в роторе I 2 R.Потери на трение и обмотку можно считать постоянными, независимо от нагрузки.
- КПД = Выход ротора / вход статора
- Выход = Вход — потери
Пример с расчетами
Рассмотрим трехфазный шестиполюсный асинхронный двигатель 440 В, 50 Гц. Мотор потребляет 50 кВт при 960 об / мин для определенной нагрузки. Предположим, что потери в статоре составляют 1 кВт, а потери на трение и обмотку — 1,5 кВт.
Чтобы определить процентное скольжение, потери в меди ротора, мощность ротора и КПД двигателя, выполните следующую функцию:
Процентная квитанция //
Синхронная скорость двигателя = (50 × 120) / 6 = 6000/6 = 1000 об / мин
Скольжение = (Синхронная скорость — Фактическая скорость) = 1000 — 960 = 40 об / мин
% скольжение = [(40/1000) × 100] = 4% = 0.04
Роторная медная потеря //
Вход ротора = 50 1 = 49 кВт
Потеря меди ротора = Вход ротора × скольжение = 49 × 0,04 = 1,96 кВт
Выход ротора //
Выход ротора = Вход ротора — Потеря меди ротора — Потери на трение и ветрозащиту
= 49 — 1,96 + 1,5
= 49 — 3,46
= 45,54 кВт
КПД двигателя //
КПД двигателя = Выход ротора / Вход двигателя
= 45.54/50 = 0,9108
= 91,08%
Century Electric Отталкивающий пусковой асинхронный двигатель (ВИДЕО)
Ресурс: Практическое устранение неисправностей электрооборудования и цепей управления — Марк Браун, Джавахар Равтани и Динеш Патил (Получить от Amazon)
,Трехфазные асинхронные двигатели переменного тока
Для промышленных и горнодобывающих применений асинхронные двигатели переменного тока являются основными двигателями для подавляющего большинства машин. Этими двигателями можно управлять либо непосредственно от сети, либо от преобразователей частоты.
В современных промышленно развитых странах более половины всей электрической энергии, используемой в этих странах, преобразуется в механическую энергию с помощью асинхронных двигателей переменного тока.
 Базовая конструкция трехфазных асинхронных двигателей переменного тока, о которых вы должны знать (фото любезно предоставлено: capolight.wordpress.com)
Базовая конструкция трехфазных асинхронных двигателей переменного тока, о которых вы должны знать (фото любезно предоставлено: capolight.wordpress.com)Применение этих двигателей охватывает практически все стадии производства и обработки.
Приложениятакже распространяются на коммерческие здания и бытовые условия. Они используются для привода насосов, вентиляторов, компрессоров, смесителей, мешалок, мельниц, конвейеров, дробилок, станков, кранов и т. Д. И т. Д.
Не удивительно, что этот тип электродвигателя настолько популярен, если учесть его простоту, надежность и низкую стоимость.В последнее десятилетие все более распространенной практикой стало использование трехфазных асинхронных двигателей переменного тока с короткозамкнутым ротором с преобразователями переменного напряжения (VVVF) для применений с частотно-регулируемым приводом (VSD).
Чтобы четко понять, как работает система VSD, необходимо понять принципы работы этого типа двигателя.
Несмотря на то, что базовая конструкция асинхронных двигателей не претерпела существенных изменений за последние 50 лет, современные изоляционные материалы, компьютерные методы оптимизации конструкции и автоматизированные методы производства привели к получению двигателей меньшего физического размера и более низкой стоимости за кВт .
Международная стандартизация физических размеров и размеров рамы означает, что двигатели большинства производителей физически взаимозаменяемы и имеют сходные рабочие характеристики.
Надежность асинхронных двигателей переменного тока с короткозамкнутым ротором по сравнению с двигателями постоянного тока составляет и . Единственные части мотора короткозамкнутого ротора, которые могут износиться, — это подшипники. Скользящие пружины и щетки не требуются для этого типа конструкции. Усовершенствования в современной конструкции подшипников с предварительной смазкой продлили срок службы этих двигателей.
Несмотря на то, что однофазные асинхронные двигатели переменного тока довольно популярны и распространены для применений с малой мощностью до примерно 2,2 кВт, они редко используются в промышленных и горнодобывающих отраслях. Однофазные двигатели чаще используются в быту.
Информация в этой статье в основном относится к 3-фазным асинхронным двигателям переменного тока с короткозамкнутым ротором, который наиболее часто используется с преобразователями VVVF.
Базовая конструкция
Асинхронный двигатель переменного тока состоит из 2 электромагнитных частей:
- Стационарная часть называется статором
- Вращающаяся часть, называемая ротором, поддерживаемая на каждом конце на подшипниках
Статор и ротор каждый состоит из:
- Электрическая цепь, обычно сделанная из изолированной меди или алюминия, для передачи тока
- Магнитная цепь, обычно изготовленная из ламинированной стали, для переноса магнитного потока
Статор
Статор является внешней стационарной частью двигателя, которая состоит из:
- Внешняя цилиндрическая рама двигателя , которая изготовлена из сварной листовой стали, чугуна или литого алюминиевого сплава.Это может включать ножки или фланец для монтажа.
- Магнитный путь , который содержит набор стальных пластин с прорезями, вдавленных в цилиндрическое пространство внутри внешней рамы. Магнитный путь ламинирован, чтобы уменьшить вихревые токи, снизить потери и уменьшить нагрев.
- Набор изолированных электрических обмоток , которые размещены внутри прорезей многослойного магнитного пути. Площадь поперечного сечения этих обмоток должна быть достаточно большой для номинальной мощности двигателя.Для 3-фазного двигателя требуется 3 комплекта обмоток, по одной для каждой фазы.
 Рисунок 1: Расслоения статора и ротора
Рисунок 1: Расслоения статора и ротораротор
Это вращающаяся часть двигателя. Как и в случае статора, описанного выше, ротор состоит из набора стальных пластин с прорезями, спрессованных вместе в форме цилиндрического магнитного пути и электрической цепи. Электрическая цепь ротора может быть любой:
- Намоточный ротор типа , который состоит из 3 комплектов изолированных обмоток с соединениями, выведенными на 3 накладки, установленные на валу.Внешние соединения с вращающейся деталью выполнены через щетки на скользящих пружинах. Следовательно, этот тип двигателя часто называют двигателем скольжения.
- Ротор с короткозамкнутым ротором типа , который содержит набор медных или алюминиевых стержней, установленных в пазы, которые соединены с торцевым кольцом на каждом конце ротора. Конструкция этих обмоток ротора напоминает «беличную клетку». Алюминиевые стержни ротора обычно отливаются под давлением в пазы ротора, что приводит к очень прочной конструкции.Даже если алюминиевые роторные стержни находятся в непосредственном контакте со стальными пластинами, практически весь ток ротора протекает через алюминиевые бруски, а не через пластинки.
Другие части
Другие детали, необходимые для завершения асинхронного двигателя:
- Два концевых фланца для поддержки двух подшипников, один со стороны привода (DE), а другой со стороны без привода (NDE)
- Два подшипника для поддержки вращающегося вала, в DE и NDE
- Стальной вал для передачи крутящего момента на нагрузку
- Охлаждающий вентилятор, расположенный в NDE для принудительного охлаждения статора и ротора
- Клеммная коробка сверху или сбоку для подключения внешних электрических соединений
 Рисунок 2. Детали сборки типичного асинхронного двигателя переменного тока
Рисунок 2. Детали сборки типичного асинхронного двигателя переменного токаКак работают асинхронные двигатели (ВИДЕО)
Справочник // Практические приводы с регулируемой скоростью и силовая электроника Малколма Барнса
,