Приборы индукционной системы — Студопедия
n Конструкция и принцип действия. Принцип действия индукционных приборов основан на взаимодействии двух или нескольких переменных магнитных потоков с токами, индуцированными в подвижном проводнике (например, диске). Типичным представителем этой системы является классический индукционный счетчик — измеритель активной энергии.
n На рис. 3.15 показана упрощенная конструкция и принцип действия индукционного однофазного счетчика активной энергии.
n Основными элементами прибора являются два магнитопровода со своими обмотками (напряжения и токовой), вращающийся диск и счетный механизм. Как и ваттметр, счетчик содержит обмотки тока и напряжения. Включается счетчик в цепь так же, как и ваттметр.
n Схема (рис. 3.16) поясняет принцип действия этого прибора.
n Рассмотрим работу счетчика на примере входных сигналов напряжения и тока синусоидальной формы с действующими значениями, равными, соответственно, U и I.
n Входное напряжение U приложенное к обмотке напряжения 2, создает в ней ток IU, имеющий по отношению к напряжению U сдвиг по фазе, близкий к 90° (из-за большого индуктивного сопротивления этой обмотки). Ток IU, рождает магнитный поток ФUв среднем сердечнике магнитопровода обмотки напряжения 1.
n Этот поток ФU делится на два потока: нерабочий поток ФU1, который замыкается внутри магнитопровода 1; и основной поток ФU2, пересекающий диск 6, закрепленный на оси 7 и вращающийся вместе с нею. Этот основной поток замыкается через противополюс 5.
n Входной ток I, текущий в обмотке тока 4, создает в магнитопроводе З магнитный поток Ф1, который дважды пересекает диск б. Поток Ф1 отстает от тока I на небольшой угол потерь αI (поскольку сопротивление токовой обмотки мало).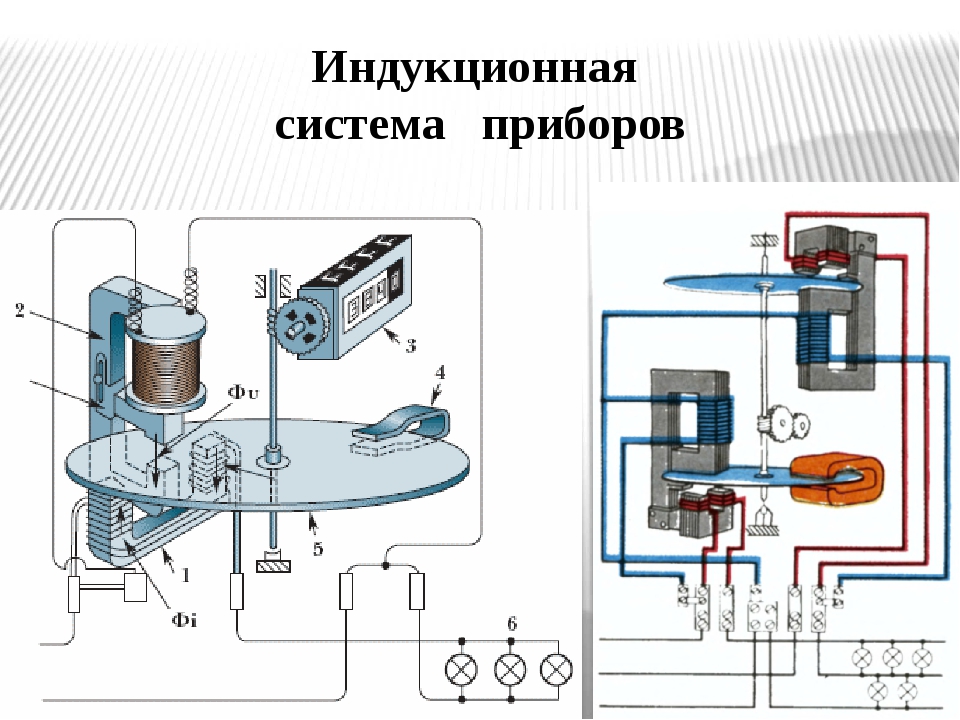
n Таким образом, диск пересекают два магнитных потока ФU2 и ФI, не совпадающих в пространстве и имеющих фазовый сдвиг ψ. При этом в диске возникает вращающий момент М:
n М = с f ФU2 ФI sinψ ,
n где с — некая константа; f— частота напряжения.
n При работе на линейном участке кривой намагничивания материалов магнитопроводов можно считать, что
n ФI= k1 I
n ФU2 = k2 IU=( k2 IU
n где k1 и k2— коэффициенты пропорциональности; ZU — полное комплексное сопротивление обмотки напряжения.
n Учитывая, что реактивная (индуктивная) составляющая сопротивления обмотки напряжения ZU гораздо больше активной, можно записать
n ZU = 2πfLU
n где LU— индуктивность обмотки напряжения.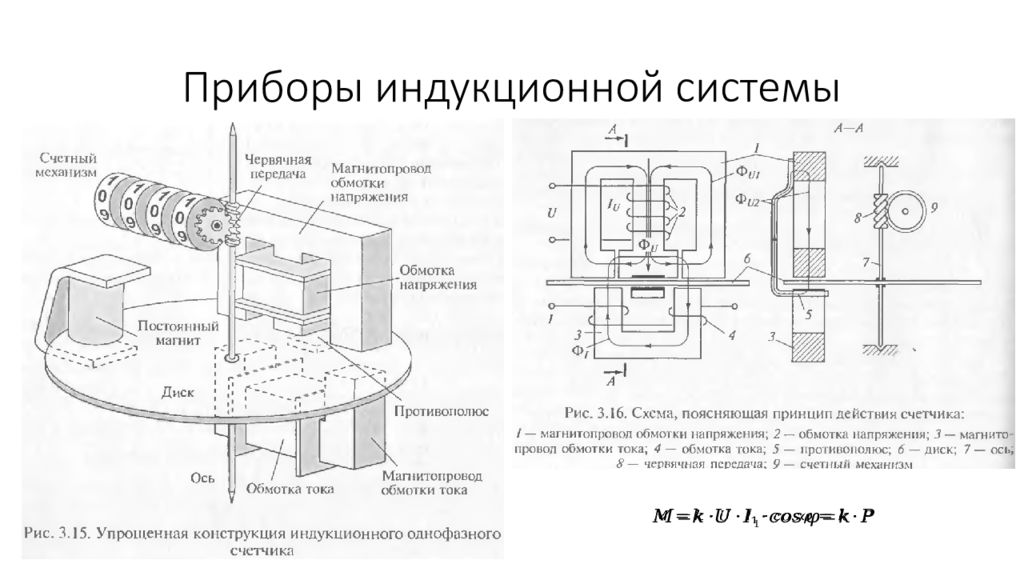
n Тогда ФU2 = (k2U / 2πfLU) =( k3U) / f ,
n где k3 = k2 / (2πLU)
n Следовательно, вращающий момент М в данной электромагнитной механической системе можно определить следующим образом:n
n М= kUI sinψ,
n где k— общий коэффициент пропорциональности.
n Для того чтобы вращающий момент был пропорционален текущей активной мощности, необходимо выполнение условия
n sinψ= соsφ.
n А это в свою очередь будет выполняться, если ψ+ φ = 90. Это равенство может быть обеспечено изменением (регулировкой) угла потерь αI,. Изменение этого угла реализуется двухступенчато: грубо — изменением числа короткозамкнутых витков, надетых на магнитопровод З, а плавно — изменением сопротивления вспомогательной цепи (эти элементы конструкции на рис. 3.15 и 3.16 не показаны)
3.15 и 3.16 не показаны)
Индукционные измерительные приборы
Эта система характеризуется применением нескольких неподвижных катушек, питаемых переменным током и создающих вращающееся или бегущее магнитное поле, которое индуктирует токи в подвижной части прибора и вызывает ее движение.
Эта система характеризуется применением нескольких неподвижных катушек, питаемых переменным током и создающих вращающееся или бегущее магнитное поле, которое индуктирует токи в подвижной части прибора и вызывает ее движение.
Индукционные приборы применяются только при переменном токе в качестве ваттметров и счетчиков электрической энергии (реже амперметров и вольтметров). Ознакомимся с теорией индукционных приборов. Следует отметить, что в настоящее время индукционные ваттметры заводами электроизмерительных приборов не выпускаются. Они заменены, ферро-динамичеокими ваттметрами, удовлетворяющими требованиям ГОСТ; показания последних меньше зависят от температуры и частоты.
Из 86 известно, что индуктированная э. д. с. отстает по фазе на 90° от магнитного потока Ф1, создающего эту э.д.с. Ток i1, возникший в алюминиевом диске, совпадает с э. д. с. по фазе и также отстает от магнитного потока Ф1 на 90°. Ток i1, взаимодействуя с магнитным потоком Ф1, может создать силу, под действием которой диск будет поворачиваться. Но в данном случае этого не произойдет (см. фиг. 334, а).
Сила взаимодействия F, пропорциональная току i1 и магнитному потоку Ф1, меняя четыре раза в течение периода свое направление, не даст возможности диску поворачиваться. Если над диском расположить рядом второй электромагнит, то его магнитный поток Ф Если добиться того, чтобы потоки Ф1 и Ф2 были сдвинуты по фазе, то и токи i1 и i2 окажутся сдвинутыми по фазе и угол между Ф1 и i2 или Ф2 и i1 уже не будет 90°. Из фиг. 334, б видно, что в этом случае сила взаимодействия будет преобладать в каком-то одном направлении, в результате чего диск будет вращаться. Если потоки Ф1 и Ф2 будут сдвинуты по фазе на 90°, то сила, действующая на диск, будет наибольшей.
Если добиться того, чтобы потоки Ф1 и Ф2 были сдвинуты по фазе, то и токи i1 и i2 окажутся сдвинутыми по фазе и угол между Ф1 и i2 или Ф2 и i1 уже не будет 90°. Из фиг. 334, б видно, что в этом случае сила взаимодействия будет преобладать в каком-то одном направлении, в результате чего диск будет вращаться. Если потоки Ф1 и Ф2 будут сдвинуты по фазе на 90°, то сила, действующая на диск, будет наибольшей.
Индукционные приборы делятся на две группы: приборы с бегущим и приборы с вращающимся магнитным полем.
Рассмотрим устройство и работу индукционного прибора с бегущим полем (фиг. 335).
На магнитопроводе 1 располагается катушка 2, состоящая из большого числа витков тонкой проволоки. Магнитный поток, создаваемый этой катушкой, большей своей частью проходит через магнитный шунт 3, а остальная часть пронизывает алюминиевый диск 4.
Успокоение диска производится подковообразным магнитом 7.
5. Какова должна быть периодичность осмотров конденсаторной установки (без отключения) на объектах без постоянно дежурного персонала.
2.2.39. Осмотр РУ без отключения должен проводиться:
на объектах с постоянным дежурством персонала — не реже 1 раза в 1 сутки; в темное время суток для выявления разрядов, коронирования — не реже 1 раза в месяц;
на объектах без постоянного дежурства персонала — не реже 1 раза в месяц, а в трансформаторных и распределительных пунктах — не реже 1 раза в 6 месяцев.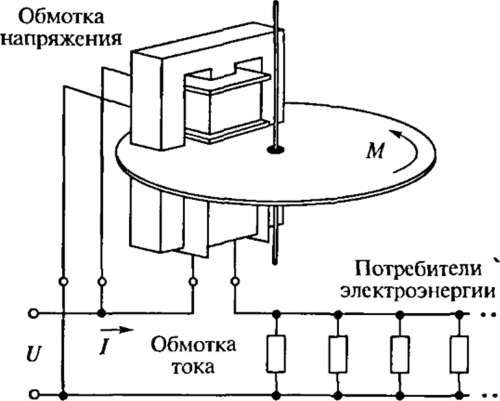
При неблагоприятной погоде (сильный туман, мокрый снег, гололед и т.п.) или сильном загрязнении на ОРУ должны быть организованы дополнительные осмотры.
Обо всех замеченных неисправностях должны быть произведены записи в журнал дефектов и неполадок на оборудовании и, кроме того, информация о них должна быть сообщена ответственному за электрохозяйство.
Замеченные неисправности должны устраняться в кратчайший срок.
Билет №5.
1. Работа без снятия напряжения на токоведущих частях или вблизи их.
Относится работа, выполняемая с прикосновением к токоведущим частям, находящимся под напряжением (рабочим или наведенным), или на расстоянии от этих токоведущих частей менее допустимых.
Вопрос 40.Какие работы относятся к работам со снятием напряжения?
Ответ. Относятся работы, когда с токоведущих частей электроустановки, на которой будут проводиться работы, отключением коммутационных аппаратов, отсоединением шин, кабелей, проводов снято напряжение и приняты меры, препятствующие подаче напряжения на токоведущие части к месту работы.
Читайте также:
Приборы индукционной системы
требляемой нагрузкой. Устройство счетчика электрической энергии схематически представлено на рис. 32. Подвижной частью этого прибора является диск из электропроводящего материала (обычно это алюминий, как обладающий наименьшим весом). Диск вращается на оси, закрепленной в подпятниках, которые должны быть износоустойчивыми и создавать минимальный и неизменный во времени момент трения. Вращающий момент создается двумя электромагнитами, расположенными по разные стороны от диска. Их расположение таково, что вихревые токи, создаваемые ими в диске, взаимодействуют с полями этих электромагнитов, и при этом взаимодействии возникает момент, пропорциональный произведению токов:
.
Если в одном из электромагнитов протекает ток нагрузки (назовем эту цепь по аналогии с подобной цепью ЭД ваттметра последовательной, см. п. 4.3), а в другом электромагните протекает ток, пропорциональный напряжению на нагрузке, то есть (назовем эту цепь параллельной , как соответствующую цепь ЭД ваттметра, см. п. 4.3), где R — добавочное сопротивление параллельной цепи, то средний вращающий момент, как и в случае ЭД ваттметра, будет пропорционален активной мощности:
,
где j — угол сдвига фазы между током и напряжением в нагрузке.
Собственное сопротивление последовательной обмотки (тока) делают как можно меньше (десятые доли Ом), а сопротивление параллельной обмотки (напряжения) — как можно больше (единицы и десятки кОм).
Внимание!
Если вам нужна помощь в написании работы, то рекомендуем обратиться к
профессионалам. Более 70 000 авторов готовы помочь вам прямо сейчас. Бесплатные
корректировки и доработки. Узнайте стоимость своей работы.
Бесплатные
корректировки и доработки. Узнайте стоимость своей работы.
Если бы противодействующий момент создавался пружинкой, то угол поворота диска был бы пропорционален мощности. Однако, отсутствие противодействующей пружинки позволяет диску вращаться, то есть выполнять операцию интегрирования угловой скорости его вращения. Если угловая скорость вращения диска пропорциональна мощности, то угол поворота диска (который индицируется индикатором с округлением до целого числа оборотов) пропорционален интегралу от мощности, то есть энергии. Для обеспечения этой пропорциональности противодействующий момент создается стабилизированным постоянным магнитом. Тормозной противодействующий момент возникает за счет того, что при движении диска в поле магнита в диске возникает ток, пропорциональный скорости его вращения, и этот ток взаимодействует с полем магнита, тормозя вращение, как это происходит при рекуперативном торможении электрического двигателя постоянного тока.
Равномерное вращение имеет место тогда, когда равны моменты: вращающий и противодействующий, то есть, когда . Поскольку вращающий момент пропорционален мощности P, а противодействующий пропорционален угловой скорости вращения w,
,
где — коэффициенты пропорциональности, — момент трения в подпятниках.
Отсюда, пренебрегая моментом трения, получаем:
, ,
где a(t) — угол поворота диска счетчика за время t, A(t) — электрическая энергия, потребленная за время t, — коэффициент пропорциональности.
Таким образом, количество оборотов диска счетчика, пропорционально энергии. Вращение диска через червячное зацепление передается на счетчик числа оборотов, которое индицируется на цифровом индикаторе.
Бытовые и промышленные счетчики предназначены для измерения количества электрической энергии, выделяемой переменным током частотой 50 Гц.
Метрологические свойства счетчиков электрической энергии:
— бытовые счетчики предназначены для измерения электрической энергии при напряжении 220 В и токах 5. 0, 10.0, предел допускаемой основной относительной погрешности (то есть приведенной к текущему показанию) 2.5%,
0, 10.0, предел допускаемой основной относительной погрешности (то есть приведенной к текущему показанию) 2.5%,
— промышленные счетчики предназначены для измерения перетоков большой электрической энергии при напряжении 3000 В и токах до 1000 А, предел допускаемой основной относительной погрешности (то есть приведенной к текущему показанию) от 0.5%.
Нормированием и международной унификацией свойств счетчиков электрической энергии занимается специальный комитет международной электротехнической комиссии (МЭК), поскольку результаты измерений перетоков электрической энергии через государственные границы являются основой для соответствующих расчетов и экономических санкций.
Схема включения счетчика электрической энергии точно такая, как схема включения ваттметра (сравнить рис. 28 в и схему рис. 32). Так же, как у ваттметра, генераторные зажимы счетчика обозначены звездочкой. После присоединения счетчика к электрической цепи корпус счетчика и все присоединительные зажимы пломбируются во избежание экономических злоупотреблений.
Поможем написать любую работу на аналогичную тему
Получить выполненную работу или консультацию специалиста по вашему учебному проекту
Узнать стоимостьИндукционный каротаж — PetroWiki
Индукционный каротаж [1] был первоначально разработан для измерения удельного сопротивления пласта в скважинах, содержащих буровые растворы на нефтяной основе, и в скважинах, пробуренных воздухом, поскольку электродные устройства не могли работать в этих непроводящих скважинах. Однако, поскольку инструменты были просты в эксплуатации и требовали гораздо меньше поправок на диаграмму, чем горизонтальные или нормальные, индукционные инструменты использовались в широком диапазоне солености скважины вскоре после их внедрения.
Принципы
Промышленные индукционные инструменты состоят из множества катушек, предназначенных для оптимизации разрешения по вертикали и глубины исследования.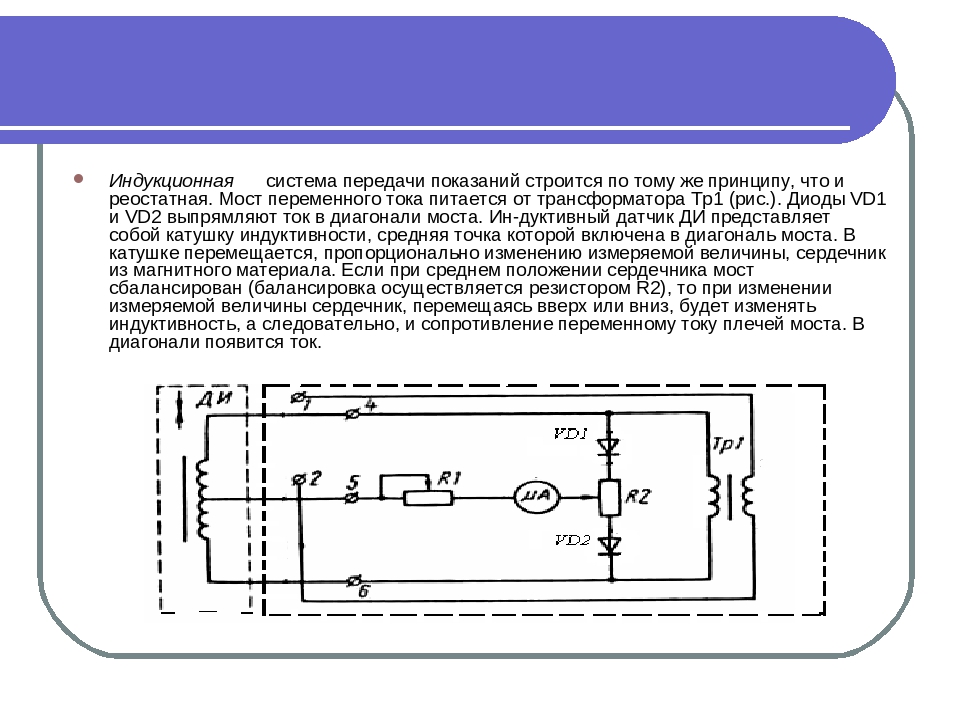 Однако, чтобы проиллюстрировать основы индукционного прибора, полезно сначала изучить базовый строительный блок массивов с несколькими катушками, двухкатушечный зонд.
Однако, чтобы проиллюстрировать основы индукционного прибора, полезно сначала изучить базовый строительный блок массивов с несколькими катушками, двухкатушечный зонд.
На рис. 1 показано, что двухкатушечный зонд состоит из передатчика и приемника, коаксиально установленных на оправке. Обычно расстояние между змеевиками составляет от 1 до 10 футов.На практике каждая катушка может содержать от нескольких до 100 и более витков, причем точное количество витков определяется инженерными соображениями. Рабочая частота промышленных индукционных приборов составляет от десятков до сотен килогерц, причем до 1990 года наиболее часто использовалась частота 20 кГц.
Рис. 1 — Схематическое изображение двухкатушечной индукционной решетки, показывающее распределение токов, индуцируемых в пласте катушкой передатчика.
Катушка индукционного передатчика приводится в действие переменным током, который создает первичное магнитное поле вокруг катушки передатчика. Первичное магнитное поле заставляет вихревые токи течь в непрерывном круговом распределении (часто ошибочно называемом «контурами заземления») с центром вокруг оси скважины. Цветовые контуры на рис. рис. 1 показывают текущее распределение. Эти вихревые токи пропорциональны проводимости пласта и, в свою очередь, создают вторичное магнитное поле, которое индуцирует переменное напряжение в приемной катушке.Это напряжение приемника в первом порядке пропорционально проводимости пласта. [2]
Первичное магнитное поле заставляет вихревые токи течь в непрерывном круговом распределении (часто ошибочно называемом «контурами заземления») с центром вокруг оси скважины. Цветовые контуры на рис. рис. 1 показывают текущее распределение. Эти вихревые токи пропорциональны проводимости пласта и, в свою очередь, создают вторичное магнитное поле, которое индуцирует переменное напряжение в приемной катушке.Это напряжение приемника в первом порядке пропорционально проводимости пласта. [2]
Поскольку ток передатчика является переменным, существует фазовый сдвиг между током передатчика и плотностью тока в пласте. Этот фазовый сдвиг неодинаков во всех частях формации — он увеличивается с увеличением расстояния до формации ( Рис. 1 ). Точно так же фаза в приемнике еще больше смещается. При очень низкой проводимости общий фазовый сдвиг составляет примерно 180 ° и увеличивается с увеличением проводимости пласта.Индукционные инструменты всегда измеряли ту часть напряжения, которая сдвинута по фазе точно на 180 ° относительно тока передатчика (называемая R-сигналом). По мере увеличения проводимости и сдвига фазы напряжение было немного меньше, чем ожидалось при линейной зависимости. Эта разница называется скин-эффектом. Современные индукционные приборы выполняют дополнительное измерение при сдвиге фазы на 270 ° от тока передатчика (называемом Х-сигналом). Эти два измерения, выполненные в квадратуре, позволяют точно измерить фазу и амплитуду напряжения приемника.
По мере увеличения проводимости и сдвига фазы напряжение было немного меньше, чем ожидалось при линейной зависимости. Эта разница называется скин-эффектом. Современные индукционные приборы выполняют дополнительное измерение при сдвиге фазы на 270 ° от тока передатчика (называемом Х-сигналом). Эти два измерения, выполненные в квадратуре, позволяют точно измерить фазу и амплитуду напряжения приемника.
Индукционная реакция
Чтобы обеспечить адекватную чувствительность к непроходимой зоне, индукционные инструменты обязательно включают сигналы от большого объема пласта. Задача состоит в том, чтобы точно определить, откуда происходит измерение в пласте. Долл определил геометрический фактор как двумерную функцию g ( ρ , z ), которая определяет часть полного сигнала, который исходит из бесконечно тонкой петли вокруг ствола скважины. Это определение действительно только при очень низкой проводимости.Моран определил модификацию геометрического фактора, которая действительна для низкоконтрастных образований при любой проводимости.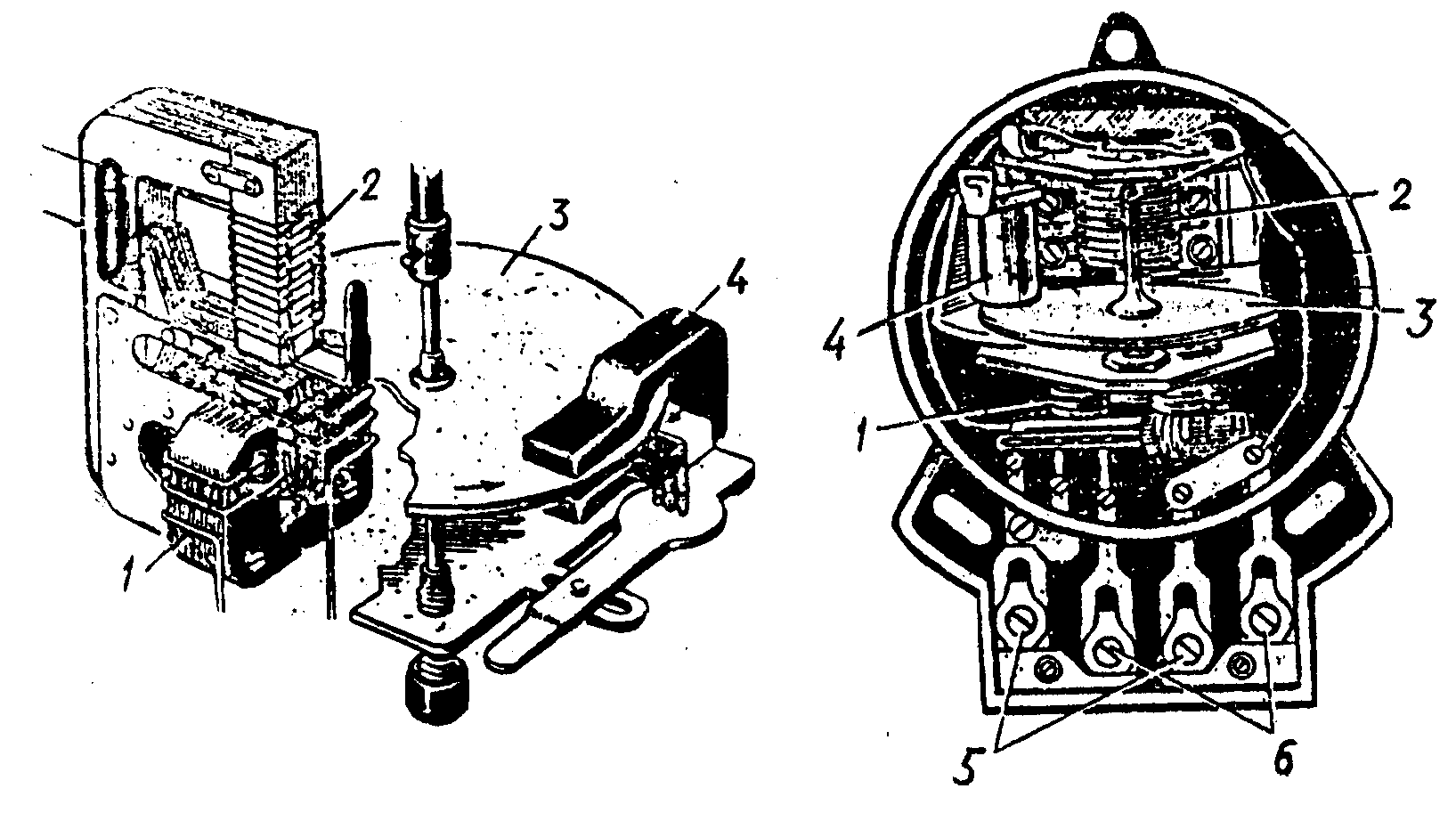 Этот ответ известен как ответ Борна. [3]
Этот ответ известен как ответ Борна. [3]
Отклик на слои пласта задается функцией вертикального отклика g V ( z ), которая определяется как интеграл функции отклика 2D g ( ρ , z ) по радиусу ρ . Отклик на радиальные изменения в толстом слое определяется функцией радиального отклика g R ( ρ ), которая определяется как интеграл от g ( ρ , z ) по z .Реакция массива на проникновение в толстый слой характеризуется интегральным радиальным откликом G R , который представляет собой совокупный интеграл g R ( ρ ) по радиусу.
Массивы с несколькими катушками
Поскольку прямая взаимная связь передатчика и приемника двухкатушечной решетки может создавать напряжение в несколько тысяч раз больше, чем от пласта, двухкатушечная решетка нецелесообразна. Самая простая на практике матрица — это матрица из трех катушек с передатчиком и двумя приемниками.Второй приемник помещается между передатчиком и основным приемником и намотан в противоположных направлениях, так что напряжения в двух приемниках точно нейтрализуются, когда массив находится в свободном пространстве. Отклик — это сумма откликов пары катушек.
Одной из самых успешных индукционных решеток была матрица 6FF40, представленная в 1960 году. [4] Она имела три передатчика и три приемника с симметричным откликом Борна g . Рис. 2 и 3 показывают его вертикальный и радиальный отклики.Группа была разработана для обеспечения глубокого исследования, разумного вертикального разрешения и низкого влияния ствола скважины. Однако большие пики в 2D-отклике вдоль инструмента привели к чувствительности к промыванию скважины, что называется эффектом пещеры.
Рис. 2 — Функция вертикального отклика G (R) для массива 6FF40 при различных значениях проводимости пласта.
Рис. 3 — Интегрированная функция радиального отклика G (R) для 6FF40 при различных значениях проводимости.
Инструменты с двойной индукцией
Одна из задач измерения удельного сопротивления формации — отделить удельное сопротивление зоны проникновения от сопротивления девственной зоны. Самой ранней концепцией для успешного решения проблемы (по крайней мере, в толстых пластах с несложными профилями проникновения) был инструмент с двойной индукцией. Этот инструмент объединил массив 6FF40 для измерения глубокой индукции (ID или ILD) с набором приемников, которые работали с передатчиками 6FF40, чтобы производить более мелкие измерения.Это получило название индукции средней глубины (IM или ILm). [5] [6]
Поскольку в простейшей модели вторжения ступенчатого профиля есть три параметра, для определения этих параметров требуется не менее трех измерений. Неглубоким измерением был неглубокий латеролог (LL8 или SFL), расположенный вместе с индукционными матрицами. Функция радиального отклика включает в себя очень сложную математику, и решением, предложенным пользователям двойных индукционных журналов, был графический решатель, называемый диаграммой торнадо.
Журналы ILD-ILM-SFL разделяются, когда есть вторжение, и это разделение позволяет интерпретировать параметры вторжения. На рис. 4 показан смоделированный отклик двойного индукционно-SFL прибора (DIT) в типичной продуктивной зоне Мексиканского залива с переходом над водной зоной.
Рис. 4 — Смоделированные каротажные диаграммы DIL в типичной формации Мексиканского залива в продуктивной зоне, переходной зоне и водной зоне.
Измерения ILm и ILd не зависят линейно от проводимости пласта.Эта нелинейность тесно связана с изменением формы отклика и глубины исследования с увеличением проводимости. Этот нелинейный отклик индукционной матрицы называется скин-эффектом, потому что он связан с эффектом «скин-эффекта» переменного тока, протекающего в проводниках.
Для коррекции этой нелинейности к напряжениям инструмента должна быть применена какая-то функция. Обработка, примененная к Schlumberger DIT [7] , состояла из функции скин-эффекта («усиления»), применяемой к измеренным R-сигналам от индукционных решеток.Это было основано на расчетах отклика в бесконечной однородной среде. ILd был дополнительно обработан с использованием трехуровневого фильтра деконволюции для небольшого увеличения резкости перехода между слоем и границей и корректировки плечевого эффекта в ограниченном диапазоне удельного сопротивления (от 1 до 10 Ом • м). В других диапазонах удельного сопротивления формации отклик приводил либо к рупорным, либо к большим плечевым эффектам. Рис. 5 показывает каротажные диаграммы DIT в наборе слоев пласта с такими же контрастами плечевого ложа, но с центрами 1, 10 и 100 Ом • м.
Рис. 5 — Смоделированные каротажные диаграммы DIT в наборе слоев пласта с теми же ограничениями плечевого ложа, но с центрами на 1, 10 и 100 Ом • м.
Поправка по стволу скважины также была вручную применена к индукционным каротажам и каротажам SFL. Таблица поправок на ствол скважины была получена на основе измерений, выполненных с помощью DIT в пластиковых трубах, заполненных соленой водой. Инструмент с двойным индукционно-мелким электродом на основе 6FF40 предлагался большинством сервисных компаний.
Индукционный фазор
Инструмент DIT стал стандартным инструментом измерения удельного сопротивления и оставался практически неизменным более 20 лет.Однако по мере того, как его применение перешло от первоначальной формации Мексиканского залива к пластам с более высоким удельным сопротивлением, проблема плечевого эффекта стала намного хуже. Хотя диаграммы коррекции плеча были предоставлены для высокого удельного сопротивления, они в основном указывали на то, что проблема была серьезной, а не служили полезным механизмом коррекции.
Основная проблема при интерпретации индукционного каротажа состоит в том, чтобы изолировать реакцию тонкого пласта и девственной зоны от уступов и зоны проникновения после того, как процесс измерения их тщательно смешал.Индукционный инструмент Phasor был представлен в середине 1980-х годов и стал первым инструментом для автоматизации внесения поправок на окружающую среду. Он использует функцию линейной деконволюции для коррекции эффекта плеча и использует измерение X-сигнала для коррекции скин-эффекта. Этот алгоритм лег в основу Phasor Processing. [8] Можно показать, что фильтр, установленный для низкой проводимости, хорошо работает при низкой проводимости, но дает большие ошибки при высокой проводимости. Однако ошибка — это медленно меняющаяся функция, тесно связанная с X-сигналом.Алгоритм, применяемый к X-сигналу для согласования его с ошибкой скин-эффекта, позволяет одному FIR-фильтру корректировать эффект плеча в широком диапазоне проводимостей.
Рис. 6 показывает результаты обработки фазора в моделях пласта Рис. 5 . Индукционные журналы полностью скорректированы на эффект плеча на всех уровнях проводимости. Диаграммы фазора в модели в Мексиканском заливе Рис. 4 не сильно отличаются от журналов DIT. Отчасти это связано с тем, что именно в этой формации журналы DIT были разработаны для хорошей работы.Хотя диаграммы торнадо были опубликованы для индукционных каротажных диаграмм Phasor, параметры вторжения вычисляются в реальном времени на буровой площадке. Поправки по стволу скважины основаны на компьютерных моделях эксцентричного инструмента в широком диапазоне солености ствола скважины и проводимости пласта. [9] Поправки на скважину применяются в реальном времени на буровой площадке. Индукционный прибор Phasor был первым индукционным прибором, который мог обеспечить полную коррекцию условий окружающей среды и определение параметров проникновения на буровой площадке.В 1987 году изменения в фильтрах деконволюции позволили вести индукционные каротажные диаграммы с вертикальным разрешением 2 фута (по сравнению с 5 футами для ILm и 8 футов для ILd).
Рис. 6 — Фазорные журналы в случаях, показанных на Рис. 5.
Инструменты с двойной индукцией, которые измеряли сигналы R и X и применяли автоматическую коррекцию плечевого эффекта, были представлены Atlas (инструмент двухфазной индукции или DPIL) и Gearhart (инструмент индукции высокого разрешения или инструмент HRI).Инструмент HRI также достиг вертикального разрешения 2 фута. Это был также первый инструмент с двойной индукцией, основанный на массиве, отличном от 6FF40. Его глубокая матрица имела среднюю глубину исследования примерно 90 дюймов. После распада Gearhart компания Halliburton приобрела инструмент HRI и ввела его в коммерческий оборот.
Однако все эти инструменты основаны на двух индукционных решетках — неглубокой и глубокой. Производительность в сложных профилях вторжения ограничена небольшим количеством измерений. На рис. 7 показаны диаграммы Phasor при моделировании, взятые из полевой диаграммы в газовом пласте. Здесь образовалось кольцевое пространство, и глубина каротажа намного меньше R t . В этой скважине трехпараметрическая модель вторжения не вернет правильное значение R t .
Рис. 7 — Диаграммы фазора при моделировании газоносного пласта, в котором образовалось кольцевое пространство.
В случае бурового раствора на масляной основе (OBM) SFL не используется.Разделение между средними и глубокими бревнами является лишь качественным признаком инвазии и не поддается количественной интерпретации.
Индукционные инструменты для массивов
С инструментом Phasor Induction концепция двойной индукции достигла своих пределов. В частности, потребовались улучшения в более точных оценках R т при наличии глубоких вторжений или сложных переходных зон. По мере того, как более грубые искажения окружающей среды были исправлены с помощью Phasor Processing или аналогичной обработки, профили кольцевого пространства и другие переходы встречались чаще.
Эти проблемы с откликом в сочетании с все более широким использованием OBM привели к концепции использования нескольких индукционных решеток с разной глубиной исследования. Когда проблемы применения линейных фильтров деконволюции были решены, подход Долла с использованием простого массива был применим. Schlumberger AIT был разработан с восемью простыми решетками из трех катушек длиной от 6 дюймов до 6 футов [10]
Принципы индукционной решетки
Первым шагом в формировании каротажных диаграмм в семействе инструментов AIT является корректировка всех необработанных сигналов массива с учетом влияния скважины.Этот процесс основан на прямой модели массивов в круглом стволе скважины и включает в себя точное описание инструмента в модели. [11]
Сигнал, измеренный индукционным зондом, эксцентрично установленным в стволе скважины, может быть математически описан как функция четырех параметров. Это радиус ствола r , проводимость бурового раствора σ м , проводимость пласта σ f и положение инструмента x относительно стенки ствола скважины (обычно как «противостояние»).
Алгоритм коррекции разработан для решения некоторых из этих параметров путем минимизации разницы между смоделированными и фактическими каротажами из четырех самых коротких массивов. Информационного содержания этих измерений недостаточно для решения всех параметров скважины одновременно. На практике этим методом можно надежно определить два из четырех параметров. Два других параметра необходимо либо измерить, либо зафиксировать. Эквивалентная проводимость однородного пласта σ f всегда должна быть решена, потому что никакие измерения не связаны с ней достаточно тесно.Остается определить один из других параметров, а оставшиеся два параметра необходимо ввести как измерения. Это приводит к трем методам коррекции ствола скважины для вычисления удельного сопротивления бурового раствора, диаметра ствола и зазора. Все AIT, кроме оригинального AIT-B, имеют встроенные датчики удельного сопротивления бурового раствора, [12] и метод «вычислить зазор» является методом коррекции скважины по умолчанию в буровом растворе на водной основе (WBM).
Был разработан метод [13] для объединения этих измерений массива, чтобы сфокусировать полученный каротаж на желаемую глубину исследования, в то же время делая это с высоким разрешением по вертикали и минимизируя эффект пещеры.Процесс формирования бревна описывается уравнением
……………….. (1)
В этом уравнении σ log — это записанный журнал AIT, σ a ( n ) — это измеренный каротаж из n -го канала, а N — общий количество каналов измерения. Этот процесс создает журнал, отличный от журнала, создаваемого любым из отдельных массивов. Он по-прежнему характеризуется функцией отклика.Эта функция отклика представляет собой взвешенную сумму функций отклика каждого из отдельных каналов n . Скин-эффект обрабатывается аналогично инструменту Phasor.
Результатом этого уравнения является комбинация журналов из восьми массивов, которая «перегоняет» радиальную информацию из восьми массивов в пять независимых журналов с глубиной исследования 10, 20, 30, 60 и 90 дюймов. из этих пяти журналов доступны с разрешением 1, 2 и 4 фута. Радиальный профиль идентичен для всех разрешений, а вертикальное разрешение одинаково для всех радиальных глубин.Набор весов w в Eq. 1 определяет, какое бревно будет произведено.
Если буровой раствор очень соленый или если ствол скважины очень большой, сигнал в массивах AIT от ствола скважины будет очень большим. В случае соленого бурового раствора даже нормальные колебания поверхности ствола скважины в результате операции бурения могут вызвать «покачивания» данных короткого массива. Несколько лет практики показали, что они могут повлиять на окончательные бревна, особенно бревна длиной 1 фут. Этот опыт показал, что в 8-дюйм.скважина с диаметром ствола 1 1/2 дюйма. стойки, 1-футовые бревна обычно используются при R т / R м контрастность до 100; 2-футовые бревна можно использовать до контрастности 450, а 4-футовые бревна можно использовать до контрастности 1000. Алгоритмы, основанные на использовании диаграммы в реальном времени и анализе «дорожного шума» 6-ти метровых бревен. в. массив позволяет в реальном времени выбирать соответствующее разрешение на основе фактических условий регистрации.
Журналы AIT разделяются в зонах вторжения и дают хорошую визуальную индикацию вторжения даже при использовании OBM. Рис. 8 показывает каротажные данные AIT в том же пласте, что и Рис. 4 (слева). В случае кольцевого пространства, Рис. 8 (справа), журналы AIT «вышли из строя», что ясно указывает на непшаговый характер профиля вторжения.
Рис. 8 — Фазорные журналы для случаев на Рис. 5.
С помощью дополнительных кривых параметры профиля проникновения могут быть решены с использованием обратных методов. Для обработки вторжений AIT можно выбрать три модели:
Все доступно в вычислительном центре, а профиль рампы используется для журналов в реальном времени.
Интерпретация каротажных диаграмм в наклонно-направленных скважинах или там, где кажущееся падение является значительным, значительно усложняется. Во-первых, нужно признать, что бревна находятся на большом видимом падении. На рис. 8 показаны каротажные диаграммы AIT в пласте с кажущимся падением в 85 °. Хотя это высокий показатель, характеристики, которые здесь появляются — рога и странный порядок бревен, — появляются в бревнах с уклоном до 40 °. На многих месторождениях разломы и оползания молодых отложений могут вызывать высокие видимые падения, которые нельзя обнаружить на сейсмических профилях.Обработка Merlin была разработана для получения бревен с полной поправкой на эффект падения. [14] Недавно стала доступна обработка под большим углом в реальном времени. [15] Эта обработка позволяет получить каротажные данные, не зависящие от угла падения. Однако получающиеся бревна тоже неглубокие. На рис. 9 справа показана обработка, инвариантная к падению (Grimaldi).
Рис. 9 — Дип-инвариантные логи AIT.
Фиг.10 — Сравнение журналов AIT и Phasor в газовой зоне в Канаде.
Пользователи индукционных каротажных диаграмм должны быть очень осторожны при проведении количественного анализа в наклонно-направленных скважинах или при опускании пласта. Если контраст плечевого ложа составляет 20 или меньше, то минимальный угол, при котором требуется коррекция падения, составляет примерно 30 °. При контрасте плечевого ложа более 100, бревна потребуют коррекции при падении до 10 °.
Примеры полевого журнала
Несколько примеров полевых журналов проиллюстрируют богатство информации, доступной в журналах индукции массива.Первый пример, Рис. 10 , представляет собой сравнение журналов индукции AIT и Phasor в газовой зоне из Канады. AIT показывает немонотонный порядок кривой, указывающий на профиль кольца. Если данные из этой зоны инвертировать в профиль кольцевого пространства с использованием ограничений по материальному балансу для определения толщины кольцевого пространства, то можно восстановить полные параметры кольцевого пространства ( Рис. 11, ).
Рис. 11 — Радиальная инверсия журналов AIT на Рис.10 для параметров вторжения с использованием модели кольцевого пространства.
Следующий пример взят из южного Техаса в скважине, пробуренной с буровым раствором на нефтяной основе. На рис. 12 показаны диаграммы AIT в сравнении с диаграммами Phasor в этой скважине. Из-за OBM доступны только журналы индукции из DIT. В нижней зоне каротажные данные AIT показывают профиль проникновения проводимости, что свидетельствует о том, что РУО сломалось при проникновении в пласт. [16] Профиль вторжения намного яснее с журналами AIT.
Рис. 12 — Каротажные диаграммы AIT и Phasor в скважине на юге Техаса, пробуренной с помощью РУО. Обратите внимание на проводящий профиль проникновения, несмотря на OBM.
Последний пример взят из наклонно-направленной скважины в Канаде диаметром 4 3/4 дюйма. скважина пробурена с РУО ( Рис. 13 ). Скважина была пробурена и повернута горизонтально. Эта часть была с отклонением примерно на 60 ° — «за поворотом». Полевые бревна длиной 2 фута на левом пути имеют закодированный порядок кривой — неглубокие бревна находятся выше, чем глубина в резистивных пластах, а затем перевернуты в проводящих пластах.Это признак сильного падения. Каротажные данные, инвариантные к падению, в центральной дорожке не демонстрируют скремблирования кривой. Журналы Merlin также показывают отсутствие скремблирования и высокое разрешение.
Рис. 13 — Журналы AIT с ограниченным доступом из скважины в Канаде. Относительное падение примерно 60 °. Показаны поля обработки, инвариантной обработки и журналы Мерлина.
Другой набор индукционных инструментов
Компания Baker Atlas представила свой индукционный инструмент с массивом High-Definition Induction Log (HDIL) в 1996 году. [17] Это инструмент из семи массивов, который работает на восьми частотах. Эта информация может обрабатываться разными способами в зависимости от среды. Несколько частот используются для коррекции скин-эффекта. Этот алгоритм разработан путем вычисления сигнала R, измеренного заданным массивом на каждой частоте в широком диапазоне удельной проводимости пласта. Данные на каждой частоте соответствуют истинной проводимости пласта. Полученная функция используется для коррекции скин-эффекта.
Затем проводимости с поправкой на скин-эффект деконволюционируют с помощью фильтров для формирования шести каротажных диаграмм на глубинах 10, 20, 30, 60, 90 и 120 дюймов и с тремя согласованными разрешениями 1, 2 и 4 фута. Дополнительным представлением является набор журналов «истинного разрешения». У этого есть те же шесть глубин, но разрешение каждого зависит от глубины исследования. Это представляет содержание информации о разрешении, которое фактически исходит из области формации около средней точки интегрированной функции радиального отклика.Коррекция провала осуществляется в вычислительном центре. Рис. 14 показывает пример. Рис. 15 показывает двумерную инверсию, доступную в вычислительном центре.
Рис. 14 — Каротажные диаграммы HDIL в пласте с относительным падением 45 ° до и после коррекции падения.
Рис. 15 — Журналы HDIL с двухмерной инверсией параметров инвазии.
Компания Halliburton представила свой инструмент для индукционной матрицы высокого разрешения (HRAI) в 2000 году. [18] Это инструмент с шестью массивами, основанный на структуре массивов HRI. Стандартные журналы инструментов HRAI представляют значения удельного сопротивления с вертикальным разрешением 4, 2 и 1 фут, каждый с шестью глубинами исследования (10, 20, 30, 60, 90 и 120 дюймов). Каротажные сопротивления инвертируются для получения истинных сопротивлений пласта в девственной зоне R t , а в зоне проникновения R xo , вблизи ствола скважины. Также представлены диаметры проникновения ( D i ), соответствующие R t и R xo .Продукты ответа инструмента HRAI доступны в режиме реального времени во время регистрации.
Вариант на основе принципа индукции массива был представлен Weatherlord (ранее Reeves Wireline). [19] Индукционная матрица (AIS) объединяет четыре простых индукционных матрицы с мелкой решеткой сфокусированных электродов. Данные индукции были представлены двумя способами. Первоначально четыре массива были объединены программно, чтобы соответствовать отклику массивов ILd и ILm. Позже была введена обработка Vectar для получения журнала с более высоким разрешением. [20] Данные из каждого массива корректируются на основе скин-эффекта, а затем согласовываются по разрешению с самым коротким массивом. Из четырех массивов представлено до шести кривых.
Индукционные и латерологические измерения
Laterolog и инструменты индукционного каротажа обладают уникальными характеристиками, которые позволяют использовать их в конкретных ситуациях и приложениях.
Индукционный каротаж обычно рекомендуется для скважин, пробуренных только с умеренно проводящими буровыми растворами или непроводящими растворами (например.g., буровой раствор на масляной основе (OBM)) и для пустых или пробуренных воздухом скважин. Латеролог обычно рекомендуется для скважин, пробуренных с использованием буровых растворов с высокой проводимостью (т. Е. Солевых растворов).
Индукционные инструменты — это чувствительные к проводимости устройства, которые наиболее точны в пластах с низким и средним удельным сопротивлением. Приборы Laterolog — это устройства измерения удельного сопротивления, которые наиболее точны в пластах со средним и высоким сопротивлением. На практике как современные инструменты латерологического, так и индукционного каротажа подходят для большинства условий каротажа, и уже нецелесообразно давать конкретные рекомендации для одного типа в пользу другого, за исключением экстремальных условий.
Устройства Laterolog видят более резистивные зоны, а индукционные приборы видят более проводящие зоны. Следовательно, когда R xo больше, чем R t , индукционный инструмент предпочтительнее для определения R t , поскольку на инструменты lateolog в основном влияет R хо . И наоборот, инструмент Laterolog предпочтительнее, когда R xo меньше R t .Электропроводность в стволе скважины оказывает сильное влияние на измерение индукции, но мало влияет на измерение латеролога.
Начиная с прибора Phasor Induction, на буровой были доступны каротажные диаграммы для индукционных приборов с поправкой на скважину. Штангенциркуль и оценка удельного сопротивления бурового раствора важны для коррекции индукционной скважины, вручную или автоматически.
Индукционные тепловизоры (AIT) имеют только автоматическую коррекцию ствола скважины — диаграмм не существует.Аналитическая форвардная модель использовалась для расчета тысяч случаев для AIT, охватывающих диапазон каждого из этих параметров. На буровой площадке штангенциркуль и точное измерение R м используются в качестве входных данных, а два других параметра рассчитываются методом наименьших квадратов с помощью вычисленной таблицы. Этот метод необходим для получения точной 10-дюймовой. каротаж в широком диапазоне размеров стволов скважин и удельного сопротивления бурового раствора.
Ниже приведены инструкции по запуску индукционных журналов, особенно для индукционных инструментов:
- Требуется штангенциркуль в том же комплекте инструментов , что и индукционный инструмент.
- R м должны быть адекватно измерены, предпочтительно в забое, с использованием точного датчика. Могут быть большие ошибки в значениях удельного сопротивления бурового раствора на основе измерений на поверхности.
- Адекватное противостояние очень важно. Никогда не бегайте гладко.
Если следовать этим рекомендациям, современные AIT могут дать точные оценки R т , даже если значение R xo / R t составляет всего 0.2.
Инструмент массива латерологов высокого разрешения (HRLA) с его инверсией пяти журналов массивов расширил возможности использования инструментов латерологов дальше в область R xo > R t . AIT, снова с инверсией бревен, расширили диапазон индукции в области R xo < R t . Рис. 16 показывает диапазон применимости инструментов AIT и HRLA.В широком перекрытии рег
AN887. Основы асинхронного двигателя переменного тока ВВЕДЕНИЕ ОСНОВНЫЕ КОНСТРУКЦИИ И ПРИНЦИП ДЕЙСТВИЯ. Статор
1 Основы асинхронного двигателя переменного тока AN887 Автор: ВВЕДЕНИЕ Ракеш Парех Microchip Technology Inc.Асинхронные двигатели переменного тока — наиболее распространенные двигатели, используемые в промышленных системах управления движением, а также в бытовых приборах с питанием от сети. Простая и прочная конструкция, низкая стоимость, низкие эксплуатационные расходы и прямое подключение к источнику питания переменного тока — основные преимущества асинхронных двигателей переменного тока. На рынке доступны различные типы асинхронных двигателей переменного тока. Для разных применений подходят разные двигатели. Хотя асинхронные двигатели переменного тока легче спроектировать, чем двигатели постоянного тока, управление скоростью и крутящим моментом в различных типах асинхронных двигателей переменного тока требует более глубокого понимания конструкции и характеристик этих двигателей.В этой заметке по применению рассматриваются основы асинхронного двигателя переменного тока; различные типы, их характеристики, критерии выбора для разных приложений и основные методы управления. ОСНОВНАЯ КОНСТРУКЦИЯ И ПРИНЦИП РАБОТЫ Как и большинство двигателей, асинхронный двигатель переменного тока имеет фиксированную внешнюю часть, называемую статором, и ротор, который вращается внутри, с тщательно спроектированным воздушным зазором между ними. Практически все электродвигатели используют вращение магнитного поля для вращения своих роторов. Трехфазный асинхронный двигатель переменного тока — единственный тип, в котором вращающееся магнитное поле создается естественным образом в статоре из-за характера питания.Двигатели постоянного тока зависят от механической или электронной коммутации для создания вращающихся магнитных полей. Однофазный асинхронный двигатель переменного тока зависит от дополнительных электрических компонентов, создающих это вращающееся магнитное поле. Внутри любого двигателя сформированы два набора электромагнитов. В асинхронном двигателе переменного тока один набор электромагнитов формируется в статоре из-за источника переменного тока, подключенного к обмоткам статора. Переменный характер напряжения питания индуцирует электромагнитную силу (ЭДС) в роторе (точно так же, как напряжение индуцируется во вторичной обмотке трансформатора) в соответствии с законом Ленца, создавая таким образом еще один набор электромагнитов; отсюда и название асинхронный двигатель.Взаимодействие между магнитным полем этих электромагнитов создает крутящую силу или крутящий момент. В результате двигатель вращается в направлении результирующего крутящего момента. Статор Статор состоит из нескольких тонких пластин алюминия или чугуна. Их перфорируют и зажимают вместе, образуя полый цилиндр (сердечник статора) с прорезями, как показано на рисунке 1. Катушки с изолированными проводами вставляются в эти прорези. Каждая группа катушек вместе с окружающим их сердечником образует электромагнит (пару полюсов) при подаче переменного тока.Число полюсов асинхронного двигателя переменного тока зависит от внутреннего соединения обмоток статора. Обмотки статора подключаются непосредственно к источнику питания. Внутри они соединены таким образом, что при подаче переменного тока создается вращающееся магнитное поле. РИСУНОК 1: ТИПИЧНЫЙ СТАТОР DS00887A-page 1
2 Ротор Ротор состоит из нескольких тонких стальных пластин с равномерно расположенными стержнями из алюминия или меди по периферии.В наиболее популярном типе ротора (ротор с короткозамкнутым ротором) эти стержни соединяются на концах механически и электрически с помощью колец. Почти 90% асинхронных двигателей имеют ротор с короткозамкнутым ротором. Это связано с тем, что ротор с короткозамкнутым ротором имеет простую и прочную конструкцию. Ротор состоит из многослойного цилиндрического сердечника с расположенными в осевом направлении параллельными пазами для проводов. Каждый слот имеет стержень из меди, алюминия или сплава. Эти стержни ротора постоянно замкнуты накоротко на обоих концах с помощью концевых колец, как показано на рисунке 2.Эта полная сборка напоминает беличью клетку, что и дало ротору название. Пазы ротора не совсем параллельны валу. Вместо этого они получают перекос по двум основным причинам. Первая причина состоит в том, чтобы двигатель работал тихо за счет уменьшения магнитного шума и уменьшения гармоник в пазах. Вторая причина — снизить тенденцию к блокировке ротора. Зубья ротора имеют тенденцию оставаться заблокированными под зубьями статора из-за прямого магнитного притяжения между ними. Это происходит, когда количество зубцов статора равно количеству зубцов ротора.Ротор установлен на валу с помощью подшипников на каждом конце; один конец вала обычно держится дольше, чем другой, для перемещения нагрузки. Некоторые двигатели могут иметь вспомогательный вал на неприводном конце для установки устройств измерения скорости или положения. Между статором и ротором существует воздушный зазор, через который за счет индукции энергия передается от статора к ротору. Создаваемый крутящий момент заставляет вращаться ротор, а затем и груз. Независимо от типа используемого ротора принцип вращения остается неизменным.Скорость асинхронного двигателя Магнитное поле, создаваемое в статоре, вращается с синхронной скоростью (Н · С). УРАВНЕНИЕ 1: f Ns = P, где: NS = синхронная скорость магнитного поля статора в оборотах в минуту P = количество полюсов статора f = частота питания в герцах Магнитное поле, создаваемое в роторе из-за индуцированного напряжения, равно переменный характер. Чтобы уменьшить относительную скорость по отношению к статору, ротор начинает вращаться в том же направлении, что и поток статора, и пытается догнать вращающийся поток.Однако на практике ротору никогда не удается догнать поле статора. Ротор работает медленнее, чем скорость поля статора. Эта скорость называется базовой скоростью (N b). Разница между N S и N b называется скольжением. Скольжение зависит от нагрузки. Увеличение нагрузки приведет к замедлению ротора или увеличению скольжения. Уменьшение нагрузки приведет к ускорению ротора или уменьшению скольжения. Проскальзывание выражается в процентах и может быть определено по следующей формуле: УРАВНЕНИЕ 2:% скольжения = Ns x100 Nb Ns, где: NS = синхронная скорость в об / мин N b = базовая скорость в об / мин РИСУНОК 2: ТИПИЧНЫЙ БЛОК Ротор Концевое кольцо Проводники Концевое кольцо Вал подшипник Подшипник с перекосом DS00887A-стр. 2
3 ВИДА ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА Как правило, асинхронные двигатели классифицируются в зависимости от количества обмоток статора.Это: Однофазный асинхронный двигатель Трехфазный асинхронный двигатель Однофазный асинхронный двигатель Вероятно, сегодня используется больше однофазных асинхронных двигателей переменного тока, чем все остальные типы вместе взятые. Логично, что чаще всего следует использовать наименее дорогой двигатель с минимальным обслуживанием. Однофазный асинхронный двигатель переменного тока лучше всего подходит под это описание. Как следует из названия, этот тип двигателя имеет только одну обмотку статора (главную обмотку) и работает от однофазного источника питания.Во всех однофазных асинхронных двигателях используется ротор с короткозамкнутым ротором. Однофазный асинхронный двигатель не запускается автоматически. Когда двигатель подключен к однофазному источнику питания, основная обмотка проходит переменный ток. Этот ток создает пульсирующее магнитное поле. Из-за индукции ротор находится под напряжением. Поскольку основное магнитное поле пульсирует, крутящий момент, необходимый для вращения двигателя, не создается. Это вызовет вибрацию ротора, но не вращение. Следовательно, однофазный асинхронный двигатель должен иметь пусковой механизм, который может обеспечить пусковой толчок для вращения двигателя.Пусковой механизм однофазного асинхронного двигателя в основном представляет собой дополнительную обмотку статора (пусковая / вспомогательная обмотка), как показано на Рисунке 3. Пусковая обмотка может иметь последовательный конденсатор и / или центробежный переключатель. При подаче напряжения питания ток в основной обмотке отстает от напряжения питания из-за полного сопротивления основной обмотки. В то же время ток в пусковой обмотке опережает / отстает от напряжения питания в зависимости от импеданса пускового механизма. Взаимодействие между магнитными полями, создаваемыми основной обмоткой и пусковым механизмом, создает результирующее магнитное поле, вращающееся в одном направлении.Двигатель начинает вращаться в направлении возникающего магнитного поля. Как только двигатель достигает 75% своей номинальной скорости, центробежный выключатель отключает пусковую обмотку. С этого момента однофазный двигатель может поддерживать достаточный крутящий момент для автономной работы. За исключением специальных конденсаторных пусковых / конденсаторных типов, все однофазные двигатели обычно используются только для приложений мощностью до 3/4 л.с. В зависимости от различных методов запуска однофазные асинхронные двигатели переменного тока классифицируются, как описано в следующих разделах.РИСУНОК 3: ОДНОФАЗНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА С МЕХАНИЗМОМ ПУСКА И БЕЗ ЗАПУСКА Конденсатор Центробежный переключатель Ротор Входная мощность Входная мощность основной обмотки Основная обмотка Однофазный асинхронный двигатель переменного тока без пускового механизма Пусковая обмотка Однофазный асинхронный двигатель переменного тока с пусковым механизмом DS00887A- стр.3
4 Асинхронный электродвигатель переменного тока с расщепленной фазой Электродвигатель с расщепленной фазой также известен как электродвигатель с индукционным пуском / асинхронным ходом.У него две обмотки: пусковая и основная. Пусковая обмотка сделана из провода меньшего диаметра и с меньшим количеством витков по сравнению с основной обмоткой, чтобы создать большее сопротивление, таким образом, поле пусковой обмотки находится под другим углом, чем у основной обмотки, что приводит к началу вращения двигателя. Основная обмотка из более толстого провода обеспечивает работу двигателя в остальное время. РИСУНОК 4: Входная мощность ТИПИЧНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА РАЗДЕЛЕННОЙ ФАЗЫ Основная обмотка Центробежный переключатель Пусковая обмотка ротора Пусковой крутящий момент низкий, обычно от 100% до 175% номинального крутящего момента.Двигатель потребляет высокий пусковой ток, примерно от 700% до 1000% номинального тока. Максимальный создаваемый крутящий момент составляет от 250% до 350% от номинального крутящего момента (график зависимости крутящего момента от скорости см. На Рисунке 9). Хорошие применения для двигателей с разделенной фазой включают небольшие измельчители, небольшие вентиляторы и воздуходувки, а также другие приложения с низким пусковым моментом и потребляемой мощностью от 1/20 до 1/3 л.с. Избегайте использования этого типа двигателя в любых приложениях, требующих высокой частоты циклов включения / выключения или высокого крутящего момента. Асинхронный двигатель переменного тока с конденсаторным пуском Это модифицированный двигатель с расщепленной фазой, в котором конденсатор включен последовательно с пусковой обмоткой для обеспечения ускоренного пуска.Как и двигатель с расщепленной фазой, конденсаторный пусковой двигатель также имеет центробежный переключатель, который отключает пусковую обмотку и конденсатор, когда двигатель достигает примерно 75% номинальной скорости. Поскольку конденсатор включен последовательно с цепью запуска, он создает больший пусковой крутящий момент, обычно от 200% до 400% от номинального крутящего момента. И пусковой ток, обычно от 450% до 575% от номинального тока, намного ниже, чем при расщепленной фазе, из-за большего провода в пусковой цепи. См. Рисунок 9 для кривой крутящего момента-скорости.Модифицированный вариант конденсаторного пускового двигателя — двигатель с резистивным пуском. В этом типе двигателя пусковой конденсатор заменен резистором. Двигатель с резистивным пуском используется в приложениях, где требуемый пусковой момент меньше, чем требуется от конденсаторного пускового двигателя. Помимо стоимости, этот двигатель не имеет каких-либо серьезных преимуществ перед двигателем с конденсаторным пуском. РИСУНОК 5: Входная мощность ТИПИЧНЫЙ КОНДЕНСАТОР ПУСКОВОЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ Они используются в широком диапазоне приложений с ременным приводом, таких как небольшие конвейеры, большие нагнетатели и насосы, а также во многих приложениях с прямым приводом или редуктором.Асинхронный двигатель переменного тока с постоянным разделенным конденсатором (конденсаторная работа) Двигатель с постоянным разделенным конденсатором (PSC) имеет конденсатор рабочего типа, постоянно подключенный последовательно с пусковой обмоткой. Это делает пусковую обмотку вспомогательной обмоткой, когда двигатель достигает рабочей скорости. Поскольку рабочий конденсатор должен быть рассчитан на непрерывное использование, он не может обеспечить пусковой импульс пускового конденсатора. Типичный пусковой момент двигателя PSC низкий, от 30% до 150% номинального момента. Двигатели PSC имеют низкий пусковой ток, обычно менее 200% от номинального, что делает их идеальными для приложений с высокой частотой включения / выключения.См. Рисунок 9 для кривой крутящего момента-скорости. Двигатели PSC имеют несколько преимуществ. Конструкцию двигателя можно легко изменить для использования с регуляторами скорости. Они также могут быть разработаны для обеспечения оптимального КПД и высокого коэффициента мощности (PF) при номинальной нагрузке. Они считаются самыми надежными из однофазных двигателей, главным образом потому, что не требуется центробежный пусковой выключатель. РИСУНОК 6: Входная мощность Конденсатор главной обмотки Ротор ТИПИЧНЫЙ ДВИГАТЕЛЬ PSC Пусковая обмотка Конденсатор Центробежный переключатель Пусковая обмотка ротора Двигатели с постоянными разделенными конденсаторами имеют широкий спектр применения в зависимости от конструкции.К ним относятся вентиляторы, воздуходувки с низким начальным крутящим моментом и периодическое использование циклов, например регулирующие механизмы, приводы ворот и устройства открывания гаражных ворот. DS00887A-стр. 4
5 Конденсаторный пуск / конденсаторный асинхронный двигатель переменного тока Этот двигатель имеет конденсатор пускового типа, соединенный последовательно со вспомогательной обмоткой, такой как конденсаторный пусковой двигатель, для высокого пускового момента. Как и двигатель PSC, он также имеет конденсатор рабочего типа, который включен последовательно со вспомогательной обмоткой после того, как пусковой конденсатор отключен от цепи.Это допускает высокий момент перегрузки. РИСУНОК 7: ТИПИЧНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ ПУСКА / РАБОТЫ КОНДЕНСАТОРА Пусковая крышка Рабочая крышка Центробежный переключатель Асинхронный двигатель переменного тока с расщепленными полюсами Двигатели с расщепленными полюсами имеют только одну главную обмотку и не имеют пусковой обмотки. Запуск осуществляется с помощью конструкции, в которой непрерывная медная петля охватывает небольшую часть каждого полюса двигателя. Это затемняет эту часть полюса, заставляя магнитное поле в заштрихованной области отставать от поля в незатененной области. Реакция двух полей заставляет вал вращаться.Поскольку электродвигатель с экранированными полюсами не имеет пусковой обмотки, пускового переключателя или конденсатора, он электрически прост и недорог. Кроме того, скорость можно регулировать простым изменением напряжения или с помощью многоотводной обмотки. Механически конструкция двигателя с расщепленными полюсами позволяет производить большие объемы. Фактически, они обычно считаются одноразовыми двигателями, а это означает, что их гораздо дешевле заменить, чем ремонтировать. Ротор РИСУНОК 8: ТИПИЧНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ С ЗАТЕННЫМ ПОЛЮСОМ Входная мощность Основная обмотка Медное кольцо Заштрихованная часть полюсной пусковой обмотки Этот тип двигателя может быть разработан для более низких токов полной нагрузки и более высокого КПД (кривую скорости вращения см. На Рисунке 9).Этот двигатель дорогостоящий из-за пусковых и рабочих конденсаторов и центробежного переключателя. Он может работать с приложениями, слишком требовательными для любого другого типа однофазного двигателя. К ним относятся деревообрабатывающее оборудование, воздушные компрессоры, водяные насосы высокого давления, вакуумные насосы и другие устройства с высоким крутящим моментом, требующие от 1 до 10 л.с. Незакрашенная часть полюса линии питания Электродвигатель с расщепленными полюсами имеет много положительных характеристик, но также имеет несколько недостатков. Его низкий пусковой крутящий момент обычно составляет от 25% до 75% номинального крутящего момента.Это двигатель с высоким скольжением и скоростью вращения на 7-10% ниже синхронной. Как правило, КПД этого типа двигателя очень низкий (ниже 20%). Низкая начальная стоимость подходит для двигателей с экранированными полюсами для работы в маломощных или легких условиях. Возможно, наиболее часто они используются в многоскоростных вентиляторах для домашнего использования. Но низкий крутящий момент, низкая эффективность и менее надежные механические характеристики делают двигатели с экранированными полюсами непрактичными для большинства промышленных или коммерческих применений, где нормой является более высокая частота цикла или непрерывная работа.На рисунке 9 показаны кривые крутящий момент-скорость для различных типов однофазных асинхронных двигателей переменного тока. DS00887A-стр. 5
6 РИСУНОК 9: КРИВЫЕ СКОРОСТИ МОМЕНТА РАЗЛИЧНЫХ ТИПОВ ОДНОФАЗНЫХ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ Пусковой и рабочий крутящий момент конденсатора (% от крутящего момента полной нагрузки) Пуск конденсатора Двухфазный PSC Переключение скорости центробежного переключателя с экранированными полюсами (%) Три- ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА Трехфазные асинхронные двигатели переменного тока широко используются в промышленных и коммерческих целях.Они классифицируются как двигатели с короткозамкнутым ротором или с фазным ротором. Эти двигатели самозапускаются и не используют конденсатор, пусковую обмотку, центробежный переключатель или другое пусковое устройство. Они создают пусковой крутящий момент от среднего до высокого. Мощность и КПД этих двигателей варьируются от средних до высоких по сравнению с их однофазными аналогами. Популярные области применения включают шлифовальные станки, токарные станки, сверлильные станки, насосы, компрессоры, конвейеры, а также печатное оборудование, сельскохозяйственное оборудование, электронное охлаждение и другие механические приложения.Двигатели с короткозамкнутым ротором Почти 90% трехфазных асинхронных двигателей переменного тока относятся к этому типу. Здесь используется ротор типа «беличья клетка», и он работает, как объяснялось ранее. Номинальная мощность трехфазных двигателей составляет от одной трети до нескольких сотен лошадиных сил. Двигатели этого типа мощностью одну или больше лошадиных сил стоят меньше и могут запускать более тяжелые нагрузки, чем их однофазные аналоги. Двигатель с фазным ротором Двигатель с фазным ротором или электродвигатель с фазным ротором представляет собой разновидность асинхронного двигателя с короткозамкнутым ротором.Хотя статор такой же, как у двигателя с короткозамкнутым ротором, он имеет набор обмоток на роторе, которые не замкнуты накоротко, а соединены с набором контактных колец. Это полезно при добавлении внешних резисторов и контакторов. Скольжение, необходимое для создания максимального крутящего момента (момент отрыва), прямо пропорционально сопротивлению ротора. В электродвигателе с контактным кольцом эффективное сопротивление ротора увеличивается за счет добавления внешнего сопротивления через контактные кольца. Таким образом, можно получить более высокое скольжение и, следовательно, тяговый момент на более низкой скорости.Особенно высокое сопротивление может привести к возникновению крутящего момента отрыва почти при нулевой скорости, обеспечивая очень высокий крутящий момент отрыва при низком пусковом токе. По мере ускорения двигателя значение сопротивления может уменьшаться, изменяя характеристики двигателя в соответствии с требованиями нагрузки. Когда двигатель достигает базовой скорости, внешние резисторы снимаются с ротора. Это означает, что теперь двигатель работает как стандартный асинхронный двигатель. Этот тип двигателя идеально подходит для очень высоких инерционных нагрузок, когда требуется создать крутящий момент отрыва при почти нулевой скорости и разогнаться до полной скорости за минимальное время с минимальным потреблением тока.DS00887A-стр. 6
7 РИСУНОК 10: Щетка для обмотки ротора ТИПИЧНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ НАЗНАВАНИЯ РОТОРА Контактное кольцо Внешнее сопротивление ротора Обратной стороной электродвигателя с контактным кольцом является то, что контактные кольца и узлы щеток нуждаются в регулярном обслуживании, что не относится к стандартным двигателям с сепаратором. Если обмотки ротора закорочены и предпринята попытка запуска (т. Е. Двигатель преобразован в стандартный асинхронный двигатель), он будет демонстрировать чрезвычайно высокий ток заблокированного ротора, обычно до 1400%, и очень низкий крутящий момент заблокированного ротора, возможно, до ниже 60%.В большинстве приложений это не вариант. Изменяя кривую крутящего момента путем изменения резисторов ротора, можно изменить скорость, с которой двигатель будет приводить в действие конкретную нагрузку. При полной нагрузке вы можете эффективно снизить скорость примерно до 50% от синхронной скорости двигателя, особенно при управлении нагрузками с переменным крутящим моментом / переменной скоростью, такими как печатные машины или компрессоры. Снижение скорости ниже 50% приводит к очень низкому КПД из-за более высокого рассеяния мощности на сопротивлениях ротора.Этот тип двигателя используется в приложениях для привода нагрузок с переменным крутящим моментом / переменной скоростью, например, в печатных машинах, компрессорах, конвейерных лентах, подъемниках и лифтах. УРАВНЕНИЕ МОМЕНТА, УПРАВЛЯЮЩЕЕ РАБОТОЙ ДВИГАТЕЛЯ Система нагрузки двигателя может быть описана основным уравнением крутящего момента. УРАВНЕНИЕ 3: TT l J dω m dj = ω dt m dt где: T = мгновенное значение развиваемого крутящего момента двигателя (Нм или фунт-дюйм) T l = мгновенное значение крутящего момента нагрузки (Нм или фунт-дюйм) ω m = мгновенная угловая скорость вала двигателя (рад / сек) J = момент инерции системы нагрузки двигателя (кг-м 2 или фунт-дюйм 2) Для приводов с постоянной инерцией (dj / dt) = 0.Следовательно, уравнение будет выглядеть следующим образом: УРАВНЕНИЕ 4: T = T l + J dω m dt Это показывает, что крутящий момент, развиваемый двигателем, уравновешивается крутящим моментом нагрузки, T l, и динамическим крутящим моментом, J (dω m / dt). . Составляющая крутящего момента J (dω / dt) называется динамическим крутящим моментом, потому что она присутствует только во время переходных процессов. Привод ускоряется или замедляется в зависимости от того, больше или меньше T l. Во время разгона двигатель должен выдавать не только крутящий момент нагрузки, но и дополнительную составляющую крутящего момента J (dω m / dt), чтобы преодолевать инерцию привода.В приводах с большой инерцией, таких как электропоезда, крутящий момент двигателя должен намного превышать момент нагрузки, чтобы получить адекватное ускорение. В приводах, требующих быстрой переходной реакции, крутящий момент двигателя должен поддерживаться на самом высоком уровне, а система нагрузки двигателя должна быть спроектирована с минимально возможным моментом инерции. Энергия, связанная с динамическим крутящим моментом, Дж (dω m / dt), сохраняется в виде кинетической энергии (KE), определяемой выражением, Дж (ω 2 м / 2). Во время замедления динамический крутящий момент J (dω m / dt) имеет отрицательный знак.Следовательно, он помогает двигателю развивать крутящий момент T и поддерживает движение привода, извлекая энергию из накопленной кинетической энергии. Подводя итог, чтобы получить устойчивое вращение двигателя, крутящий момент, развиваемый двигателем (T), всегда должен быть равен требуемому крутящему моменту нагрузки (T l). График зависимости крутящего момента от скорости типичного трехфазного асинхронного двигателя показан на рисунке 11. DS00887A-page 7
8 РИСУНОК 11: ТИПИЧНАЯ КРИВАЯ СКОРОСТИ 3-ФАЗНОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА Момент отрыва (% от тока полной нагрузки двигателя) 7 x FLC LRC 6 x FLC 5 x FLC 4 x FLC LRT 3 x FLC 2 x FLC 1 x FLC Ток статора при полном напряжении Пусковой момент при полном напряжении Момент затяжки Образец кривой крутящего момента нагрузки 2 x FLT 1 x FLT Крутящий момент (% крутящего момента двигателя при полной нагрузке) 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% Скорость ротора (% от полной скорости) ПУСКОВАЯ ХАРАКТЕРИСТИКА Асинхронные двигатели в состоянии покоя выглядят так же, как короткозамкнутый трансформатор, и при подключении к полному напряжению питания потребляют очень высокий ток, известный как ток заторможенного ротора.Они также создают крутящий момент, который известен как крутящий момент заторможенного ротора. Момент заторможенного ротора (LRT) и ток заторможенного ротора (LRC) являются функцией напряжения на клеммах двигателя и конструкции двигателя. По мере ускорения двигателя и крутящий момент, и ток будут меняться в зависимости от скорости ротора, если напряжение поддерживается постоянным. Пусковой ток двигателя с фиксированным напряжением будет падать очень медленно по мере ускорения двигателя и начнет значительно падать только тогда, когда двигатель достигнет не менее 80% от полной скорости.Фактические кривые для асинхронных двигателей могут значительно различаться в зависимости от конструкции, но общая тенденция — большой ток, пока двигатель почти не достигнет полной скорости. LRC двигателя может варьироваться от 500% от тока полной нагрузки (FLC) до 1400% от FLC. Обычно хорошие двигатели имеют диапазон от 550% до 750% FLC. Пусковой крутящий момент асинхронного двигателя, запускаемого с фиксированным напряжением, немного упадет до минимального крутящего момента, известного как крутящий момент, когда двигатель ускоряется, а затем увеличивается до максимального крутящего момента, известного как крутящий момент пробоя или отрыва. , почти на полной скорости, а затем упадет до нуля на синхронной скорости.График зависимости пускового момента от скорости ротора зависит от напряжения на клеммах и конструкции ротора. LRT асинхронного двигателя может варьироваться от 60% FLT до 350% FLT. Крутящий момент может составлять всего 40% от FLT, а крутящий момент пробоя может достигать 350% от FLT. Как правило, LRT для средних и больших двигателей составляют от 120% до 280% от FLT. Коэффициент мощности двигателя при пуске обычно увеличивается до максимума при ускорении двигателя и затем снова падает, когда двигатель приближается к полной скорости.РАБОЧИЕ ХАРАКТЕРИСТИКИ Когда двигатель набирает нужную скорость, он работает с малым скольжением на скорости, определяемой количеством полюсов статора. Обычно скольжение при полной нагрузке асинхронного двигателя с короткозамкнутым ротором составляет менее 5%. Фактическое скольжение при полной нагрузке конкретного двигателя зависит от конструкции двигателя. Типичная базовая скорость четырехполюсного асинхронного двигателя колеблется от 1420 до 1480 об / мин при 50 Гц, а синхронная скорость составляет 1500 об / мин при 50 Гц. Ток, потребляемый асинхронным двигателем, состоит из двух компонентов: реактивной составляющей (ток намагничивания) и активной составляющей (рабочего тока).Ток намагничивания не зависит от нагрузки, но зависит от конструкции статора и напряжения статора. Фактический ток намагничивания асинхронного двигателя может варьироваться от 20% FLC для большой двухполюсной машины до 60% для маленькой восьмиполюсной машины. Рабочий ток двигателя прямо пропорционален нагрузке. DS00887A-стр. 8
9 Тенденция для больших машин и высокоскоростных машин состоит в том, чтобы показывать низкий ток намагничивания, в то время как для низкоскоростных машин и малых машин тенденция состоит в том, чтобы показывать высокий ток намагничивания.Типичная четырехполюсная машина среднего размера имеет ток намагничивания около 33% от FLC. Низкий ток намагничивания указывает на низкие потери в стали, в то время как высокий ток намагничивания указывает на увеличение потерь в стали и, как следствие, снижение эффективности работы. Как правило, эффективность работы асинхронного двигателя максимальна при 3/4 нагрузки и варьируется от менее 60% для небольших низкоскоростных двигателей до более 92% для больших высокоскоростных двигателей. Рабочий коэффициент мощности и КПД обычно указаны в технических паспортах двигателя.ХАРАКТЕРИСТИКА НАГРУЗКИ В реальных приложениях существуют различные виды нагрузок с разными кривыми крутящего момента-скорости. Например, постоянный крутящий момент, нагрузка с переменной скоростью (винтовые компрессоры, конвейеры, питатели), переменный крутящий момент, нагрузка с переменной скоростью (вентилятор, насос), нагрузка с постоянной мощностью (тяговые приводы), постоянная мощность, нагрузка с постоянным крутящим моментом (привод моталки) и высокая Пусковой момент / момент отрыва с последующей постоянной крутящей нагрузкой (экструдеры, винтовые насосы). Система нагрузки двигателя считается стабильной, когда развиваемый крутящий момент двигателя равен требуемому крутящему моменту нагрузки.Двигатель будет работать в установившемся режиме с фиксированной скоростью. Реакция двигателя на любое возмущение дает нам представление о стабильности системы нагрузки двигателя. Эта концепция помогает нам быстро оценить выбор двигателя для привода определенной нагрузки. В большинстве приводов электрическая постоянная времени двигателя незначительна по сравнению с его механической постоянной времени. Следовательно, во время переходного режима можно предположить, что двигатель находится в электрическом равновесии, подразумевая, что кривая установившегося режима крутящий момент-скорость также применима к переходному режиму.В качестве примера на рисунке 12 показаны кривые крутящего момента двигателя с двумя разными нагрузками. Систему можно назвать стабильной, когда работа будет восстановлена после небольшого отклонения от нее из-за нарушения работы двигателя или нагрузки. Например, возмущение вызывает снижение скорости ω m. В первом случае на новой скорости крутящий момент двигателя (T) больше момента нагрузки (T l). Следовательно, двигатель будет ускоряться, и работа будет восстановлена до X. Аналогичным образом, увеличение скорости ω m, вызванное возмущением, сделает момент нагрузки (T l) больше, чем крутящий момент двигателя (T), в результате при замедлении и восстановлении точки срабатывания до X.Следовательно, в точке X система устойчива. Во втором случае уменьшение скорости приводит к тому, что крутящий момент нагрузки (T l) становится больше крутящего момента двигателя (T), привод замедляется, и рабочая точка перемещается от Y. Точно так же увеличение скорости приведет к крутящий момент двигателя (T) больше момента нагрузки (T l), что приведет к смещению рабочей точки дальше от Y. Таким образом, в точке Y система нестабильна. Это показывает, что в первом случае выбор двигателя для привода данной нагрузки правильный; во втором случае выбранный двигатель не является правильным выбором и требует изменения для движения данной нагрузки.Типичные существующие нагрузки с их кривыми крутящего момента-скорости описаны в следующих разделах. РИСУНОК 12: КРИВАЯ МОМЕНТА СКОРОСТИ ОДИН ДВИГАТЕЛЬ С ДВУМЯ РАЗЛИЧНЫМИ НАГРУЗКАМИ ω m T T l ω m T X Y T l 0 Крутящий момент 0 Крутящий момент DS00887A-страница 9
10 Постоянный крутящий момент, нагрузки с переменной скоростью Крутящий момент, необходимый для этого типа нагрузки, является постоянным независимо от скорости. Напротив, мощность линейно пропорциональна скорости.Такое оборудование имеет такие характеристики, как винтовые компрессоры, конвейеры и питатели. РИСУНОК 13: ПОСТОЯННЫЙ МОМЕНТ, ПЕРЕМЕННАЯ СКОРОСТЬ НАГРУЗКИ РИСУНОК 15: ПОСТОЯННАЯ МОЩНОСТЬ НАГРУЗКИ Крутящий момент Мощность Скорость Момент Мощность Скорость Постоянная мощность, постоянные крутящие нагрузки Это обычное явление в бумажной промышленности. В этом типе нагрузки по мере увеличения скорости крутящий момент остается постоянным, а мощность линейно увеличивается. Когда крутящий момент начинает уменьшаться, мощность остается постоянной. Нагрузки с переменным крутящим моментом и переменной скоростью Это наиболее часто встречается в промышленности и иногда называется нагрузкой с квадратичным крутящим моментом.Крутящий момент — это квадрат скорости, а мощность — куб скорости. Это типичная характеристика крутящего момента вентилятора или насоса. РИСУНОК 16: ПОСТОЯННАЯ МОЩНОСТЬ, ПОСТОЯННАЯ МОМЕНТНАЯ НАГРУЗКА Мощность крутящего момента РИСУНОК 14: ПЕРЕМЕННЫЙ МОМЕНТ, ПЕРЕМЕННАЯ СКОРОСТЬ НАГРУЗКИ Скорость крутящего момента Мощность Скорость Высокий пусковой момент / момент срыва с последующим постоянным крутящим моментом Этот тип нагрузки характеризуется очень высоким крутящим моментом при относительно низких частотах. Типичные области применения включают экструдеры и винтовые насосы. Постоянные силовые нагрузки Этот тип нагрузки встречается редко, но иногда встречается в промышленности.Мощность остается постоянной, а крутящий момент меняется. Крутящий момент обратно пропорционален скорости, что теоретически означает бесконечный крутящий момент при нулевой скорости и нулевой крутящий момент при бесконечной скорости. На практике всегда существует конечное значение требуемого момента отрыва. Этот тип нагрузки характерен для тяговых приводов, которым для начального ускорения требуется высокий крутящий момент на низких скоростях, а затем значительно сниженный крутящий момент на рабочей скорости. РИСУНОК 17: ВЫСОКИЙ МОМЕНТ ПУСКА / ОТКЛЮЧЕНИЯ, СЛЕДУЮЩИЙ ПОСТОЯННЫМ МОМЕНТОМ Скорость крутящего момента DS00887A-стр. 10
11 СТАНДАРТЫ НА ДВИГАТЕЛИ Во всем мире существуют различные стандарты, которые определяют различные рабочие и конструктивные параметры двигателя.Два наиболее широко используемых параметра — это Национальная ассоциация производителей электрооборудования (NEMA) и Международная электротехническая комиссия (IEC). NEMA NEMA устанавливает стандарты для широкого спектра электротехнической продукции, включая двигатели. NEMA в первую очередь ассоциируется с двигателями, используемыми в Северной Америке. Разработанные стандарты отражают общепринятые отраслевые практики и поддерживаются производителями электрического оборудования. Эти стандарты можно найти в публикации стандарта NEMA № MG 1. Некоторые большие двигатели переменного тока могут не подпадать под стандарты NEMA.Они созданы для удовлетворения требований конкретного приложения. Они называются двигателями NEMA выше. IEC IEC — это европейская организация, которая среди прочего издает и продвигает во всем мире механические и электрические стандарты для двигателей. Проще говоря, можно сказать, что IEC является международным аналогом NEMA. Стандарты МЭК связаны с двигателями, используемыми во многих странах. Эти стандарты можно найти в IEC. Двигатели, которые соответствуют этим стандартам или превосходят их, называются двигателями IEC.Стандарт NEMA
Возможные принципы работы устройства (отредактированное название)
Уведомление о конфиденциальности для «Бесплатная энергия | поиск бесплатной энергии и обсуждение бесплатной энергии»
В соответствии с законодательством Европейского Союза мы обязаны информировать пользователей, заходящих на сайт www.overunity.com изнутри ЕС о файлах cookie, которые использует этот сайт, и информации, которую они содержат, а также о предоставлении им средств для «согласия» — другими словами, разрешить сайту устанавливать файлы cookie.Файлы cookie — это небольшие файлы, которые хранятся в вашем браузере, и у всех браузеров есть опция, с помощью которой вы можете проверять содержимое этих файлов и при желании удалите их.
В следующей таблице подробно указано имя каждого файла cookie, его источник и то, что мы знаем об информации. этот файл cookie хранит: