Устройство, принцип действия, способы регулирования частоты вращения, применение, достоинства и недостатки двигателя постоянного тока
Всем привет. Рад вас видеть у себя на сайте. И сегодня, я бы хотел поговорить обо всём, что касается двигателей постоянного тока. О том из чего они сделаны, про их принцип действия, про способы регулировки частоты вращения, об их достоинствах и недостатках.
Устройство электродвигателя постоянного тока.
Все мы и понимаем, что электрические машины создаются на заводах изготовителях под определённые нагрузки, для определённых режимов работы и для эксплуатации в определённых местах. По этому все электродвигателя не могут быть одинаковыми, у них всегда есть какие-то свои особенности. Но основные детали и их названия всё же меняются.
Электродвигатель постоянного тока состоит из таких деталей:
1. Корпус или статор.
2. Якорь или коллектор.
3. Щёток и щёткодержателей.
4. Двух подшипниковых щитов (передний и задний).
5. Вентилятора для охлаждения.
6. Сердечник полюса и обмотка полюса.
Принцип действия.
Работа данного двигателя напрямую зависит от взаимодействия магнитных полей статора и коллектора. Как мы с вами уже знаем, что в статоре и на коллекторе есть обмотки. Если подать на эти обмотки напряжение, то за счёт этого будут создаться магнитные поля. А эти магнитные поля уже и будут заставлять коллектор вращаться. Смотрите, как это показано на картинке.
Способы регулирования частоты вращения.
Регулировать частоту вращения таких двигателей можно за счёт включения в обмотку якоря дополнительного сопротивления. В качестве сопротивления может быть обычный реостат. Только такой способ не очень эффективный, так как при таком способе возрастают энергетические потери. Но всё равно данный способ считается самым распространённым.
Достоинства и недостатки.
Основные достоинства ДПТ:
1. Простое устройство двигателя.
2. Можно очень легко изменять частоту вращения вала.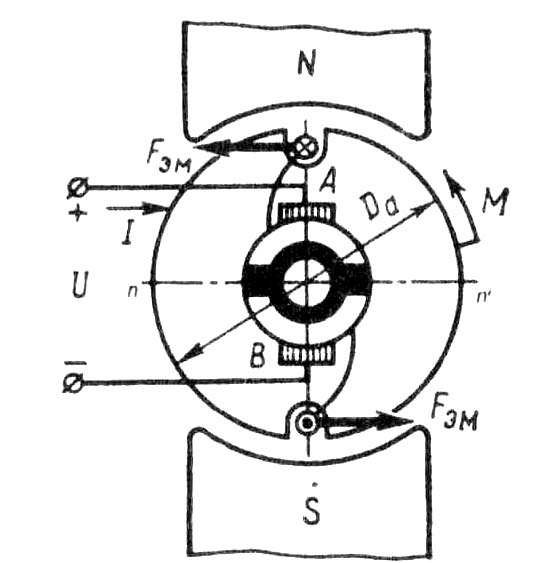
3.За счет сильного момента очень хорошие пусковые характеристики.
4. Можно использовать как в качестве двигателя, так же и в качестве генератора.
5. По сравнению с некоторыми другими двигателями, имеет не большие размеры.
Недостатки:
1. Очень высокая цена.
2. Если подключать двигатель к переменной сети, то так же нужны выпрямительные устройства.
3. Очень часто приходится обслуживать коллекторно-щёточный узел.
4. Коллектор имеет ограниченный срок службы из-за износа.
Применение.
Двигателя постоянного тока широко применяются на различной технике. Такой, как: краны, экскаваторы, с трамваи, электрички, тепловозы, теплоходы и так далее. Ещё, такие двигателя, используют в электроинструменте. На производстве, их можно встретить на станках, где нужно регулировать частоту вращения в очень широком диапазоне.
На этом у меня всё. Статья получилась не очень объёмной, но для общего понятия вполне информативна. Если есть вопросы, то задавайте их в комментариях, жмите на кнопки социальных сетей и подписывайтесь на обновление.
С уважением Александр!
Читайте также статьи:
принцип работы, конструкция, преимущества и недостатки :: SYL.ru
Электродвигатель постоянного тока состоит из вращающихся нагнетательных элементов, помещенных на статически закрепленную станину. Подобные устройства широко востребованы в технических областях, где требуется повышение диапазона регулировки скоростей, поддержание стабильного вращения привода.
Конструкция
Конструктивно электродвигатель постоянного тока состоит из ротора (якоря), индуктора, коллектора и щеток. Давайте рассмотрим, что представляет собой каждый элемент системы:- Ротор состоит из множества катушек, что покрыты проводящей ток обмоткой. Некоторые электродвигатели постоянного тока 12 вольт содержат до 10 и более катушек.
- Индуктор – неподвижная часть агрегата. Состоит из магнитных полюсов и станины.
- Коллектор – функциональный элемент двигателя в виде цилиндра, размещенного на валу. Содержит изоляцию в виде медных пластин, а также выступы, которые находятся в скользящем контакте с щетками двигателя.
- Щетки – неподвижно закрепленные контакты. Предназначены для подводки электрического тока к ротору. Чаще всего электродвигатель постоянного тока оснащается графитовыми и медно-графитовыми щетками. Вращение вала приводит к замыканию и размыканию контактов между щетками и ротором, что вызывает искрение.
Работа электродвигателя постоянного тока
Механизмы данной категории содержат специальную обмотку возбуждения на индукторной части, куда поступает постоянный ток, что в последующем преобразуется в магнитное поле.Обмотка ротора поддается воздействию потока электроэнергии. Со стороны магнитного поля на данный конструктивный элемент оказывает влияние сила Ампера. В результате образуется крутящий момент, что проворачивает роторную часть на 90о. Продолжается вращение рабочих валов двигателя за счет образования эффекта коммутации на щеточно-коллекторном узле.
При поступлении электрического тока на ротор, который находится под воздействием магнитного поля индуктора, электродвигатели постоянного тока (12 вольт) создают момент силы, что приводит к выработке энергии в процессе вращения валов. Механическая энергия передается от ротора к прочим элементам системы посредством ременной передачи.
Механическая энергия передается от ротора к прочим элементам системы посредством ременной передачи.
Типы
В настоящее время выделяют несколько категорий электродвигателей постоянного тока:- С независимым возбуждением – питание обмотки происходит от независимого источника энергии.
- С последовательным возбуждением – обмотка якоря включена последовательно с обмоткой возбуждения.
- С параллельным возбуждением – обмотка ротора включена в электрическую цепь параллельно источнику питания.
- Со смешанным возбуждением – двигатель содержит несколько обмоток: последовательную и параллельную.
Управление электродвигателем постоянного тока
Пуск двигателя осуществляется за счет работы специальных реостатов, которые создают активное сопротивление, включаемое в цепь ротора. Для обеспечения плавного запуска механизма реостат обладает ступенчатой структурой.
Для старта реостата задействуется все его сопротивление. По мере роста скорости вращения возникает противодействие, что накладывает ограничение на рост силы пусковых токов. Постепенно ступень за ступенью увеличивается подводимое к ротору напряжение.
Постепенно ступень за ступенью увеличивается подводимое к ротору напряжение.
Электродвигатель постоянного тока позволяет регулировать скорость вращения рабочих валов, что осуществляется следующим образом:
- Показатель скорости ниже номинальной корректируется изменением напряжения на роторе агрегата. При этом крутящий момент остается стабильным.
- Темп работы выше номинального регулируется током, который возникает на обмотке возбуждения. Значение крутящего момента снижается при поддержании постоянной мощности.
- Управление роторным элементом осуществляется при помощи специализированных тиристорных преобразователей, которые представляют собой приводы постоянного тока.
Преимущества и недостатки
Сравнивая электродвигатели постоянного тока с агрегатами, функционирующими на переменном токе, стоит отметить их повышенную производительность и увеличенный коэффициент полезного действия.Оборудование данной категории отлично справляется с отрицательным воздействием факторов окружающей среды.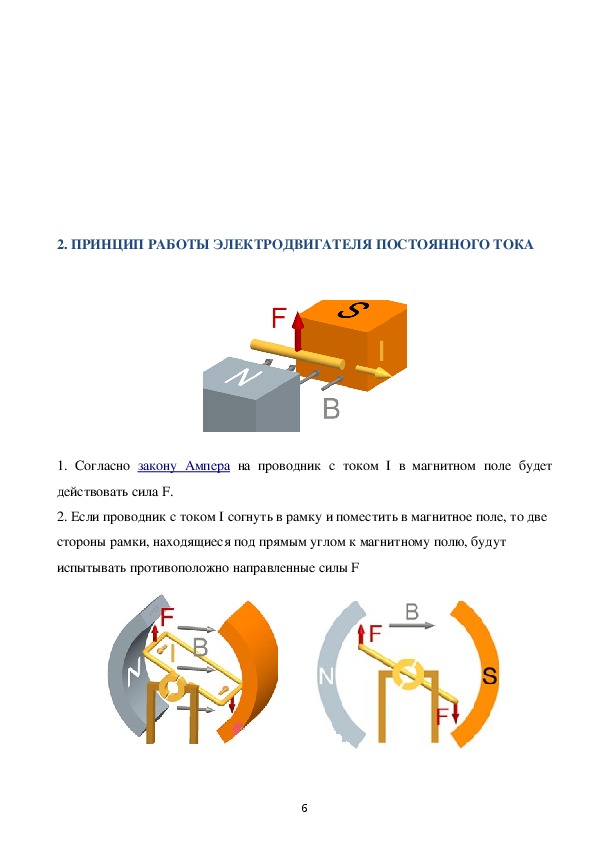 Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Защита в виде надежных изоляционных материалов дает возможность задействовать максимальный ресурс агрегатов. Допускается применение подобного оборудования при температурных условиях в пределах от -50 до +50 оС и относительной влажности воздуха порядка 98 %. Запуск механизма возможен после периода длительного простоя.
Среди недостатков электрических двигателей постоянного тока на первое место выходит достаточно быстрый износ щеточных узлов, что требует соответствующих расходов на обслуживание. Сюда же относится крайне ограниченный срок службы коллектора.
назначение, конструкция, устройство и принцип действия :: SYL.ru
Машины постоянного тока (МПТ) – это общий термин, объединяющий генераторы (ГПТ) и двигатели (ДПТ). Как правило, говоря об МПТ, имеют в виду биполярные машины, у которых имеются чередующиеся «северные» и «южные» магнитные полюсы возбуждения и механический или электронный коммутатор тока вращающейся обмотки якоря с одним единственным кольцевым полюсом (в отличие от униполярных машин).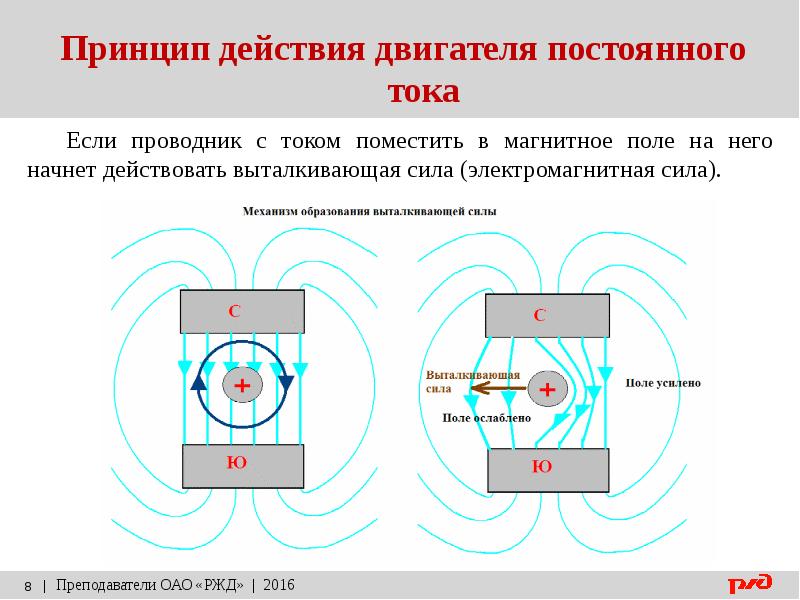 Мы также будем придерживаться этого принципа.
Мы также будем придерживаться этого принципа.
Классификация МПТ
В электромашиностроении и теории электромашин принято разделять МПТ на устройства с явно и с неявно выраженными полюсами возбуждения, с цилиндрической или многогранной станиной, с возбуждением постоянным током или постоянными магнитами, с механическим коммутатором-коллектором на якоре или бесконтактные. Назначение машин постоянного тока разделяет их на общепромышленные и специализированные. Среди последних можно назвать, например, тяговые ДПТ, используемые в рельсовом транспорте. Выделяются также металлургические ДПТ, в особенности двигатели для прокатных станов и т. д.
Как известно, обмотки машин постоянного тока разделяются на обмотки возбуждения (ОВ) и якоря (ОЯ). Первые служат для возбуждения магнитного поля устройства, а вторые — для отбора мощности от питающей электросети в режиме двигателя или для питания электрической нагрузки в режиме генератора. Существуют еще и обмотки дополнительных полюсов, используемые для облегчения процесса коммутации.
Электрические машины постоянного тока независимо от того, являются ли они генераторами или двигателями, могут быть классифицированы на основе схем соединения их обмоток возбуждения и якоря. Они могут составлять единую электрическую цепь или же вообще не иметь электрической связи (независимое возбуждение). Этот принцип классификации делит МПТ на два основных типа. Вы поймете дальнейшую их классификацию из представленной ниже схемы.
Устройство машины постоянного тока
ГПТ может использоваться как ДПТ без каких-либо конструктивных изменений. Конечно, промышленностью выпускаются машины, предназначенные для работы в качестве двигателей, и машины, являющиеся генераторами. Однако отличия между ними состоят в конструкции отдельных частей, и на этапе общего ознакомления могут быть проигнорированы. Следовательно, далее будем рассматривать устройство машины постоянного тока в общем, без привязки к режиму ее работы.
Ниже на рисунке показан поперечный разрез простой МПТ с двумя парами явно выраженных полюсов. Конструкция ее содержит две основные части: статор и якорь. Рассмотрим, из каких деталей они состоят.
Конструкция ее содержит две основные части: статор и якорь. Рассмотрим, из каких деталей они состоят.
Статор содержит станину, а также главные и находящиеся между ними дополнительные полюсы (на рисунке не показаны).
Станина – это внешняя конструктивная оболочка МПТ. Она бывает литой из чугуна (у машин старых конструкций) или сварной из толстого листа стали. Станина механически прочно скрепляет всю сборку МПТ. Кроме того, она служит магнитопроводом для магнитного потока, производимого главными полюсами.
Последние прикреплены к станине с помощью винтов или сварки. Основное их назначение – нести катушки обмотки возбуждения, намотанные на них и соединенные последовательно между собой таким образом, чтобы магнитная полярность полюсов чередовалась, т. е. после «северного» полюса следовал бы «южный» и т. д.
Полюсные наконечники (башмаки), являющиеся расширением главных полюсов, служат двум целям: для предотвращения соскальзывания катушек и для равномерного распределения поля возбуждения на большей части окружности воздушного зазора.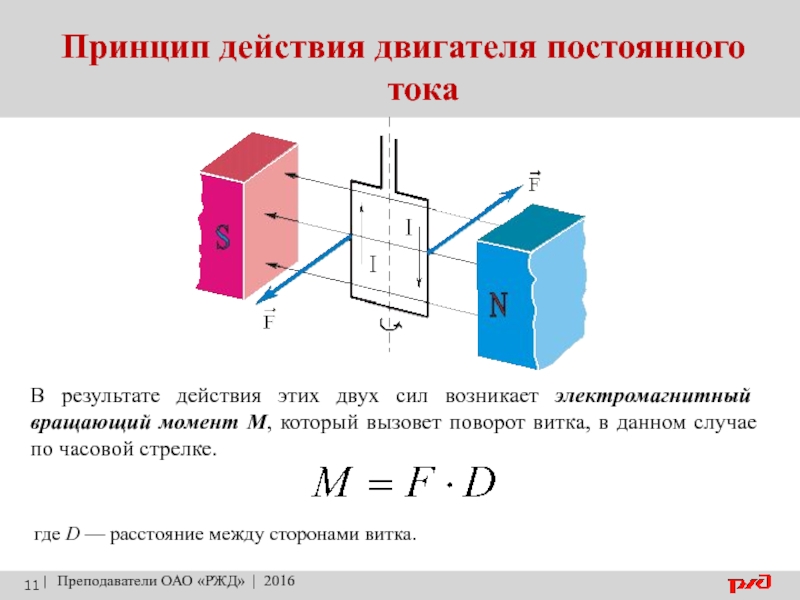
Якорь машины постоянного тока состоит из сердечника с обмоткой, втулки и вала. Сердечник – это стальной каркас цилиндрической формы, сложенный из тонких электрических листов стали, покрытых с обеих сторон электроизоляционным лаком. Это делается для предотвращения появления вихревых токов, стремящихся замкнуться в толще сердечника. В пазах его уложены секции петлевой или волновой обмотки якоря, коллектор машины постоянного тока и щетки. Обмотку якоря нужно присоединить к внешней электросети постоянного тока. Но нельзя непосредственно соединить выводы обмотки с сетевым вводом, потому что она вращается. Поэтому между сетью и обмоткой якоря установлен коммутатор-коллектор, представляющий собой множество изолированных друг от друга пластин из меди, образующих внешнюю цилиндрическую поверхность, разделенную изоляционными дорожками. Неподвижные контактные щетки скользят по ней, когда якорь с коллектором вращаются. Таким образом неподвижные щетки физически соприкасаются с вращающейся обмоткой якоря, а с их помощью уже можно выполнить подключение к внешней сети машины постоянного тока.
Развитие конструкций МПТ
Первые промышленные образцы МПТ появились в 70-х гг. 19 в. Поначалу они имели кольцевой якорь с тороидальной (граммовской) обмоткой. После изобретения барабанного якоря они приобрели законченный вид, примерно соответствующий вышеприведенному рисунку. Однако конструкция машин постоянного тока во второй половине 20 в. претерпела довольно сильные изменения. Прежде всего они коснулись статора. Вместо явно выраженных главных полюсов стали применять неявнополюсную конструкцию. В ней сосредоточенную катушку возбуждения каждого главного полюса заменили несколько меньшие по размерам катушки, расположенные в пазах шихтованного статора, который имеет прямоугольную или многогранную форму, как на рисунке ниже. В тех же пазах статора размещают и компенсационную обмотку, о которой будет сказано далее. В результате конструкция машин постоянного тока стала намного легче.
В связи с развитием управляемого асинхронного электропривода некоторые специалисты высказывают мнение о скором вытеснении асинхронными двигателями ДПТ из традиционных для них областей применения, таких как тяговый электропривод или привод металлургических механизмов. Однако пока еще рано говорить об этом как о свершившемся факте.
Однако пока еще рано говорить об этом как о свершившемся факте.
Общий принцип образования обмотки якоря
Любая из обмоток якоря является замкнутой сама на себя непрерывной электрической цепью, состоящей из последовательно соединенных секций (катушек). В простейшем случае секция может представлять просто один виток с двумя пазовыми проводниками или же быть многовитковой. Пазовые стороны секции всегда разнесены на расстояние, чуть меньшее полюсного деления – части окружности якоря, приходящейся на один главный полюс. Поэтому они в каждой из секций всегда находятся под главными полюсами противоположной полярности. В единую замкнутую цепь секции соединяются на пластинах коллектора. Способ же этого соединения и определяет тип обмотки. Рисунок ниже поясняет принцип образования обмотки якоря машины постоянного тока из шести многовитковых секций, соединяемых на пластинах коллектора.
В положении, показанном на рисунке, щетки разделяют обмотку якоря на две параллельные ветви: верхнюю, в которую входят секции L1, L2, L3, и нижнюю, состоящую из секций L4, L5, L6. Число таких ветвей зависит от типа обмотки якоря, но оно всегда четное и не может быть меньше двух.
Число таких ветвей зависит от типа обмотки якоря, но оно всегда четное и не может быть меньше двух.
Петлевые и волновые обмотки якоря
Это два основных типа обмоток, каждый из которых имеет несколько разновидностей. Мы рассмотрим их простейшие варианты. Слева на рисунке ниже показана форма секций, из которых состоит простая петлевая обмотка якоря машин постоянного тока. Как можно увидеть, такая же форма секций характерна для волновой обмотки.
В первом варианте один (начальный, стартовый) вывод каждой двухвитковой секции подключен к i-й пластине коллектора, а второй (конечный, завершающий) вывод соединен на соседней (i+1)-й пластине коллектора с начальным выводом следующей секции (см. рисунок выше). Таким образом, выводы каждой секции присоединены к двум рядом расположенным пластинам, а сама секция, состоящая из двух пазовых сторон и двух лобовых частей по форме напоминает петлю (отсюда и название обмотки).
Секция волновой обмотки имеет выводы, присоединенные не к соседним пластинам коллектора, а к разнесенным на определенный шаг, называемый шагом обмотки по коллектору ук. Для простой петлевой обмотки ук=1, а для простой волновой — ук=(К±1)/р, где К – число пластин коллектора, р- число пар главных полюсов. Как видно из рисунка, вследствие такого способа соединения секции приобретают форму, похожую на полуволну синусоиды, что и обусловило название обмотки.
Для простой петлевой обмотки ук=1, а для простой волновой — ук=(К±1)/р, где К – число пластин коллектора, р- число пар главных полюсов. Как видно из рисунка, вследствие такого способа соединения секции приобретают форму, похожую на полуволну синусоиды, что и обусловило название обмотки.
Принцип действия в режиме генератора
Согласно первоначальной трактовке явления электромагнитной индукции в движущемся проводнике, данной еще Фарадеем, когда он пересекает при движении силовые линии магнитного поля, в нем наводится ЭДС. Следуя этому принципу, можно объяснить причину наведения ЭДС в активных проводниках (тех, что уложены в пазы) обмотки якоря МПТ. Действительно, они движутся под главными полюсами, пересекая при этом линии поля. Поскольку последние непрерывны, каждый проводник якоря независимо от того, расположен ли он на его поверхности (так было в первых конструкциях МПТ) или в пазах, пройдя под полюсом, пересечет все исходящие из его наконечника линии поля. Направление действия индуцированной в проводнике ЭДС можно определить, применяя правило правой руки, которое иллюстрирует рисунок ниже.
Направление действия индуцированной в проводнике ЭДС можно определить, применяя правило правой руки, которое иллюстрирует рисунок ниже.
Пазовые проводники якоря попарно входят в состав витков катушек его обмотки. Сумма ЭДС витков дает ЭДС катушки. Неподвижные щетки делят всю обмотку якоря на несколько (минимум две) параллельных ветвей. Сумма ЭДС всех катушек, входящих в параллельную ветвь, дает ЭДС всей обмотки якоря МПТ. Таким образом, принцип действия машин постоянного тока при работе генератором можно сформулировать так: якорь возбужденной машины вращается приводным двигателем, в его обмотке наводится ЭДС, которая вызывает протекание постоянного тока якоря в замкнутой электроцепи, включающей обмотку, коллектор, щетки и внешнюю сеть с нагрузкой.
При наличии тока якоря на него начинает действовать тормозящий электромагнитный момент. Он создает нагрузку для приводного двигателя. Чем больше электрическая мощность нагрузки генератора, тем сильнее тормозится его якорь и тем выше нагрузка приводного двигателя.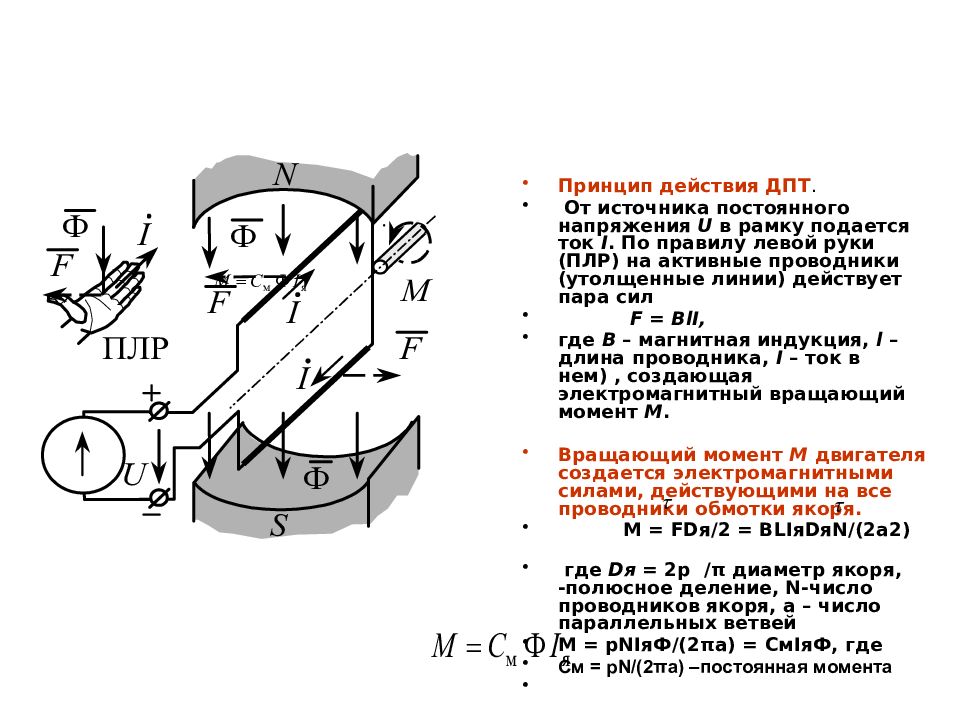 При этом согласно закона сохранения энергии в последнем расходуется столько топлива на приведение якоря генератора во вращение, чтобы высвобожденная при его сгорании химическая энергия за вычетом энергетических потерь в двигателе и генераторе равнялась бы энергии, отбираемой электрической нагрузкой от машины постоянного тока.
При этом согласно закона сохранения энергии в последнем расходуется столько топлива на приведение якоря генератора во вращение, чтобы высвобожденная при его сгорании химическая энергия за вычетом энергетических потерь в двигателе и генераторе равнялась бы энергии, отбираемой электрической нагрузкой от машины постоянного тока.
Устройство и принцип действия в режиме двигателя
В этом режиме ток якоря подается в его обмотку от питающей электросети при пуске. На пазовые проводники якоря с током, находящиеся под главными полюсами, действуют силы Ампера. Направление их определяется по правилу левой руки, которое иллюстрирует рисунок ниже. Их сумма создает вращающий электромагнитный момент якоря (в отличие от тормозящего в режиме генератора), и он приходит во вращение.
Но во вращающихся пазовых проводниках, как и в генераторном режиме, наводятся ЭДС, которые дают суммарную ЭДС обмотки якоря. Она действует встречно напряжению питающей сети, частично уравновешивая его. Так выглядит принцип действия машин постоянного тока при работе двигателя. При этом согласно закона сохранения энергии от питающей электросети двигателем отбирается столько электроэнергии, сколько требуется механической энергии для приведения в движение присоединенного механизма с учетом энергетических потерь (электрических и механических). Иначе говоря, чем сильнее нагружен двигатель механически, т. е. чем больше вес и момент инерции приводимых им в движение механизмов или чем больше момент сопротивления среды, препятствующий их движению, тем большее количество электроэнергии потребляется двигателем от сети.
При этом согласно закона сохранения энергии от питающей электросети двигателем отбирается столько электроэнергии, сколько требуется механической энергии для приведения в движение присоединенного механизма с учетом энергетических потерь (электрических и механических). Иначе говоря, чем сильнее нагружен двигатель механически, т. е. чем больше вес и момент инерции приводимых им в движение механизмов или чем больше момент сопротивления среды, препятствующий их движению, тем большее количество электроэнергии потребляется двигателем от сети.
О физическом механизме наведения ЭДС в проводниках обмотки якоря МПТ
Следует отметить, что физикам-теоретикам не нравится вышеприведенный (и популярный в технической литературе) физический механизм наведения ЭДС, т. к. силовые линии магнитного поля – это всего лишь умозрительный образ, придуманный Фарадеем для его описания. Никаких подтверждений действительного существования их как реальных физических объектов не существует.
Альтернативным механизмом наведения ЭДС в движущемся пазовом проводнике обмотки якоря МПТ является воздействие на электроны внутри него силы Лоренца, пропорциональной магнитной индукции в месте расположения проводника. Однако и здесь имеется противоречие, заключающееся в том, что внутри пазов якоря магнитная индукция исчезающе мала, а на величине ЭДС проводников это не сказывается. Поэтому вместо индукции в пазе в формулу подставляют индукцию в воздушном зазоре, что, конечно же, неправильно, но дает результат, близкий к наблюдаемому на практике.
Однако и здесь имеется противоречие, заключающееся в том, что внутри пазов якоря магнитная индукция исчезающе мала, а на величине ЭДС проводников это не сказывается. Поэтому вместо индукции в пазе в формулу подставляют индукцию в воздушном зазоре, что, конечно же, неправильно, но дает результат, близкий к наблюдаемому на практике.
Выходом из данной коллизии является переход к описанию магнитного поля не посредством вектора магнитной индукции, а при помощи векторного магнитного потенциала. Активным сторонником такого подхода был выдающийся русский электротехник К. М. Поливанов. Более подробно с этой проблемой можно познакомиться в работах автора.
Магнитное поле МПТ при нагрузке
В нагруженной МПТ имеется два вида магнитных потоков: поток ОВ и поток ОЯ, создаваемые токами этих обмоток. Силовые линии первого из них направлены вдоль осей пары полюсов, через которые он замыкается, как это показано на фигуре 1 на рисунке ниже. Такой поток возбуждения называется продольным. Если полюсов в МПТ больше двух, то в воздушном зазоре под наконечником каждого из них это поле также является продольным.
Если полюсов в МПТ больше двух, то в воздушном зазоре под наконечником каждого из них это поле также является продольным.
Силовые линии потока ОЯ замыкаются поперек оси полюсов, поэтому применительно к МПТ говорят о поперечном поле якоря, которое показано на фигуре 2 на том же рисунке.
Поток якоря суммируется с потоком возбуждения, образуя результирующий поток. В этом проявляется реакция якоря машины постоянного тока, заключающаяся в воздействии поперечного поля на продольное поле возбуждения, силовые линии которого при этом искажаются, сгущаясь возле одного края полюса и разреживаясь возле другого. В ГПТ сгущение силовых линий поля, т. е. его усиление относительно поля возбуждения, происходит под набегающим на якорь краем полюса, а в ДПТ — под сбегающим, как показано на фигуре 3.
Побочные следствия реакции якоря
Вследствие явления магнитного насыщения стали результирующее поле под краем полюса, где оно усиливается, не может увеличиться в той же степени, в которой ослабляется под противоположным краем.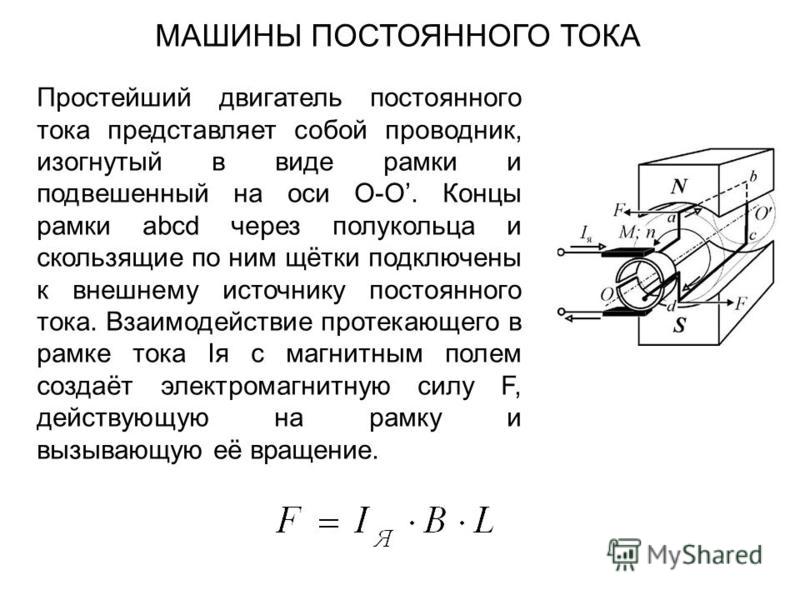 Поэтому результатом данного эффекта является общее снижение магнитного поля нагруженной машины. В случае генератора ослабление поля уменьшает генерируемое напряжение.
Поэтому результатом данного эффекта является общее снижение магнитного поля нагруженной машины. В случае генератора ослабление поля уменьшает генерируемое напряжение.
Реакция якоря машины постоянного тока искажает пространственную картину силовых линий поля, следовательно, изменяется положение магнитной нейтрали (МН) — в двухполюсной МПТ она перпендикулярна силовым линиям потока возбуждения и совпадает с геометрической нейтралью ГН. Щетки должны быть размещены на МН, в противном случае это приведет к искрению под ними. Таким образом, в связи с реакцией якоря трудно определить точное положение МН. Впрочем, для этого существуют апробированные на практике способы.
Вторым негативным следствием данного эффекта, которое существенно ухудшает эксплуатационные характеристики машины постоянного тока, является повышение максимального напряжения между рядом расположенными пластинами. Посмотрите еще раз на схему простой петлевой обмотки. Если стороны некоторой ее секции находятся одновременно под краями двух соседних разноименных главных полюсов с увеличенным из-за реакции якоря полем, то индуктируемое в этой секции напряжение, а следовательно, и напряжение между парой соседних пластин коллектора может существенно превысить его величину, когда реакция якоря отсутствует, т.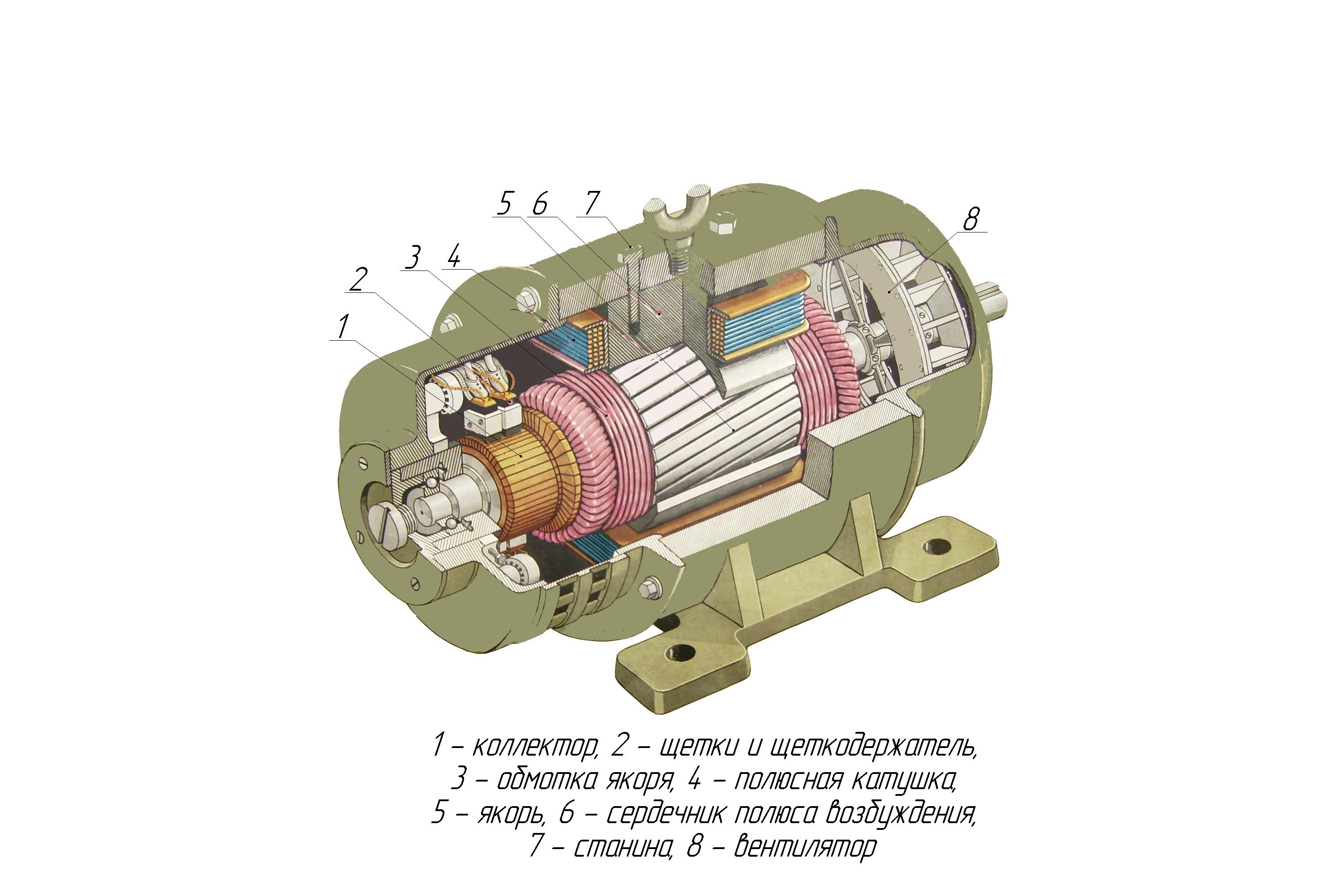 е. при холостом ходе. Причем такое превышение наступает обычно сразу на нескольких участках коллектора, расположенных в зонах увеличенного поля. В результате может возникнуть такое явление, как круговой огонь на коллекторе, которое может его полностью разрушить. Поэтому без специальных конструктивных способов подавления реакции якоря работа машины постоянного тока, имеющей среднюю и большую мощность, практически невозможна.
е. при холостом ходе. Причем такое превышение наступает обычно сразу на нескольких участках коллектора, расположенных в зонах увеличенного поля. В результате может возникнуть такое явление, как круговой огонь на коллекторе, которое может его полностью разрушить. Поэтому без специальных конструктивных способов подавления реакции якоря работа машины постоянного тока, имеющей среднюю и большую мощность, практически невозможна.
Способы борьбы с реакцией якоря
Наиболее простым и первым из появившихся способов стало увеличение воздушного зазора от середины к краям наконечников полюсов, т. е. выполнение расходящегося зазора. При этом увеличивалось магнитное сопротивление потоку реакции якоря, и воздействие его на поле возбуждения уменьшалось. Но сопротивление росло и для потока возбуждения, что вынуждало увеличивать габариты катушек на главных полюсах.
Для ослабления потока якоря при изготовлении главных полюсов используется электротехническая сталь с магнитной анизотропией ее свойств (магнитной проницаемости) вдоль и поперек оси полюсов.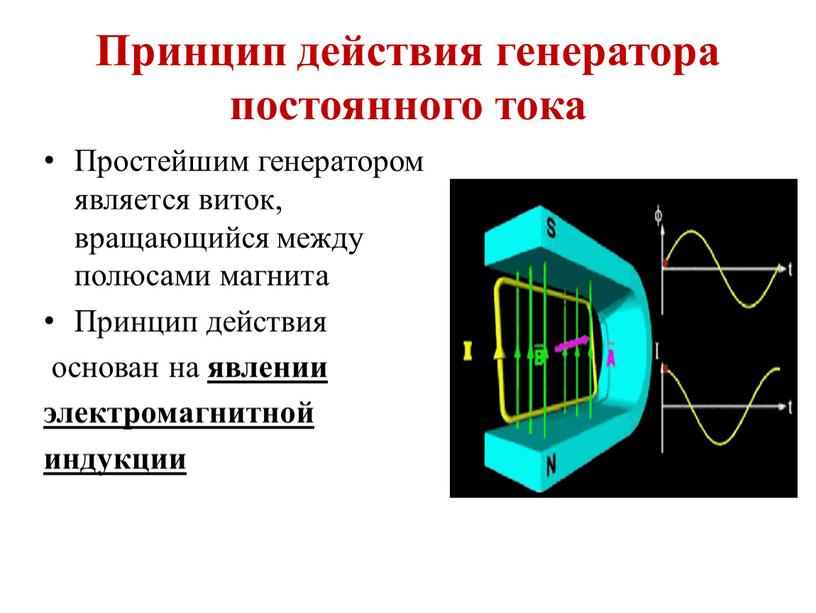 Полюсы из такой стали хорошо проводят продольный поток возбуждения и плохо — поперечный поток якоря. Однако такая сталь очень дорога, а ее свойства сильно зависят от температуры и изменяются с течением времени.
Полюсы из такой стали хорошо проводят продольный поток возбуждения и плохо — поперечный поток якоря. Однако такая сталь очень дорога, а ее свойства сильно зависят от температуры и изменяются с течением времени.
Наконец был найден радикальный способ борьбы с реакцией якоря машины постоянного тока. Устройство и принцип действия ее при этом почти не изменились, но добавилась еще одна обмотка – компенсационная. Она размещается в пазах, выполняемых в наконечниках главных полюсов (или в пазах статора вместе с обмоткой возбуждения при неявнополюсной конструкции), как показано на рисунке ниже, и присоединяется последовательно к обмотке якоря, т. е. по ним проходит одинаковый ток.
Однако направление обтекания им витков компенсационной обмотки выбрано таким образом, что возбуждаемый ею магнитный поток направлен навстречу потоку реакции якоря и компенсирует его.
Все современные электрические машины постоянного тока, имеющие среднюю и большую мощность, оснащаются такой обмоткой.
Устройство и принцип действия двигателя постоянного тока.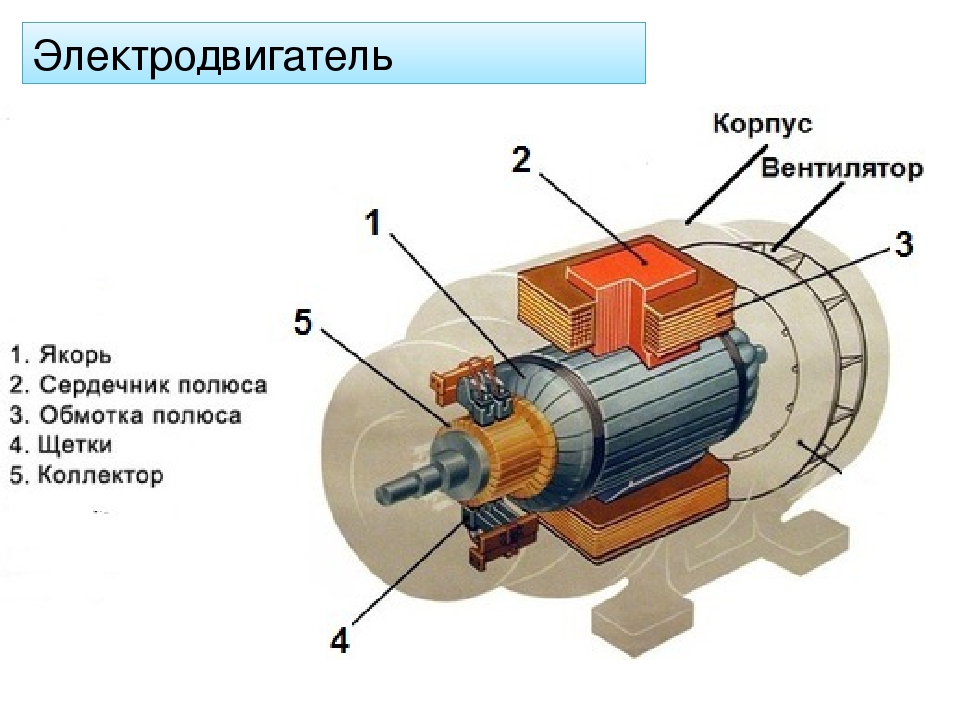
Устройство
простейшего электродвигателя
постоянного тока.
На рис. 1-1 представлен простейший электродвигатель
постоянного тока,
а на рис. 1-2 дано его схематическое
изображение в осевом направлении.
Неподвижная часть двигателя, называемая
индуктором, состоит из полюсов и круглого
стального ярма, к которому прикрепляются
полюсы. Назначением индуктора является
создание в электродвигателе основного магнитного потока. Индуктор
изображенной на рис. 1-1 простейшего электродвигателя имеет два полюса
1 (ярмо индуктора на рис. 1-1 не показано).
Вращающаяся часть электродвигателя состоит из укрепленных на валу
цилиндрического якоря 2 и коллектора.
3. Якорь состоит из сердечника, набранного
из листов электротехнической стали, и
обмотки, укрепленной на сердечнике
якоря. Обмотка якоря в показанном на
рис. 1-1 и 1-2 простейшем
электродвигателе имеет один виток. Концы витка соединены
с изолированными от вала медными
пластинами коллектора, число которых
в рассматриваемом случае равно двум.
На коллектор налегают две неподвижные
щетки 4, с помощью которых обмотка якоря
соединяется с внешней цепью. Основной
магнитный поток в нормальных электродвигателях
постоянного тока создается обмоткой возбуждения, которая
расположена на сердечниках полюсов и
питается постоянным током. Магнитный
поток проходит от северного полюса N
через якорь к южному полюсу S и от него
через ярмо снова к северному полюсу.
Сердечники полюсов и ярмо также
изготовляются из ферромагнитных
материалов.
Обмотка якоря в показанном на
рис. 1-1 и 1-2 простейшем
электродвигателе имеет один виток. Концы витка соединены
с изолированными от вала медными
пластинами коллектора, число которых
в рассматриваемом случае равно двум.
На коллектор налегают две неподвижные
щетки 4, с помощью которых обмотка якоря
соединяется с внешней цепью. Основной
магнитный поток в нормальных электродвигателях
постоянного тока создается обмоткой возбуждения, которая
расположена на сердечниках полюсов и
питается постоянным током. Магнитный
поток проходит от северного полюса N
через якорь к южному полюсу S и от него
через ярмо снова к северному полюсу.
Сердечники полюсов и ярмо также
изготовляются из ферромагнитных
материалов.
Рис.
1-1. Простейший электродвигатель
постоянного тока Рис.
1-2. Работа простейшего электродвигателя постоянного
тока в режиме Генератора (а) и двигателя
(б).
Предположим, что якорь электродвигателя (рис. 1-1 и 1-2, а) приводится во вращение по часовой стрелке. Тогда в проводниках обмотки якоря индуктируется ЭДС, направление которой может быть определено по правилу правой руки (рис. 1-3, а) и показано на рис. 1-1 и 1-2, а. Поскольку поток полюсов предполагается неизменным, то эта ЭДС индуктируется только вследствие вращения якоря и называется ЭДС вращения. В обоих проводниках вследствие симметрии индуктируются одинаковые ЭДС, которые по контуру витка складываются. Частота ЭДС f в двухполюсном электродвигателе равна скорости вращения якоря n, выраженной в оборотах в секунду: f = n, а в общем случае, когда машина имеет р пар полюсов с чередующейся полярностью: f = pn
Таким
образом, в генераторе коллектор является
механическим выпрямителем, который
преобразовывает переменный ток обмотки
якоря в постоянный ток во внешней
цепи. Рис.
1-3. Правила правой (а) и левой (б) руки.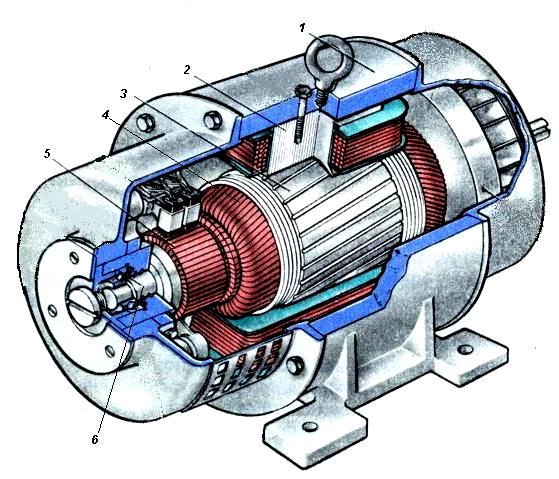
Способы пуска в ход двигателей постоянного тока
При включении двигателя возникает большой пусковой ток, превышающий номинальный в 10 — 20 раз. Для ограничения пускового тока двигателей мощностью более 0,5 кВт последовательно с цепью якоря включают пусковой реостат (рис. 7).Величину сопротивления пускового реостата можно определить по выражению
Rn =U/(1,8 — 2,5)Iном-Rя
где U — напряжение сети, В;
Iном — номинальный ток двигателя. А;
Rя — сопротивление обмотки якоря, Ом.
Перед
включением двигателя необходимо
убедиться в том, что рычаг 2 пускового реостата (рис.7) находится на
холостом контакте 0. затем включают рубильник и рычаг реостата
переводят на первый промежуточный
контакт. При этом двигатель возбуждается,
а в цепи якоря появляется пусковой ток,
величина которого ограничена всеми
четырьмя секциями сопротивления Rn. По
мере увеличения частоты вращения якоря
пусковой ток уменьшается и рычаг реостата
переводят на второй, третий контакт и
т. д., пока он не окажется на рабочем
контакте. Пусковые реостаты рассчитаны
на кратковременный режим работы, а
поэтому рычаг реостата нельзя длительно
задерживать на промежуточных контактах:
в этом случае сопротивления реостата
перегреваются и могут перегореть.
Прежде чем отключить двигатель от сети,
необходимо рукоятку реостата перевести
в крайнее левое положение. При этом
двигатель отключается от сети, но цепь
обмотки возбуждения остается замкнутой
на сопротивление реостата. В противном
случае могут появиться большие
перенапряжения в обмотке возбуждения
в момент размыкания цепи. При пуске в
ход двигателей постоянного тока
регулировочный реостат в цепи обмотки
возбуждения следует полностью вывести
для увеличения потока возбуждения. Для
пуска двигателей с последовательным
возбуждением применяют двухзажимные
пусковые реостаты, отличающиеся от
трехзажимных отсутствием медной дуги
и наличием только двух зажимов — Л и Я.
д., пока он не окажется на рабочем
контакте. Пусковые реостаты рассчитаны
на кратковременный режим работы, а
поэтому рычаг реостата нельзя длительно
задерживать на промежуточных контактах:
в этом случае сопротивления реостата
перегреваются и могут перегореть.
Прежде чем отключить двигатель от сети,
необходимо рукоятку реостата перевести
в крайнее левое положение. При этом
двигатель отключается от сети, но цепь
обмотки возбуждения остается замкнутой
на сопротивление реостата. В противном
случае могут появиться большие
перенапряжения в обмотке возбуждения
в момент размыкания цепи. При пуске в
ход двигателей постоянного тока
регулировочный реостат в цепи обмотки
возбуждения следует полностью вывести
для увеличения потока возбуждения. Для
пуска двигателей с последовательным
возбуждением применяют двухзажимные
пусковые реостаты, отличающиеся от
трехзажимных отсутствием медной дуги
и наличием только двух зажимов — Л и Я.
Механическая характеристика двигателей постоянного тока (n=f(M)) с параллельным, последовательным и смешанным возбуждением.
Двигатели постоянного тока находят широкое применение в промышленных, транспортных и других установках, где требуется широкое и плавное регулирование скорости вращения (прокатные станы, мощные металлорежущие станки, электрическая тяга на транспорте и т. д.).
По способу возбуждения двигатели постоянного тока подразделяются аналогично генераторам на двигатели независимого, параллельного, последовательного и смешанного возбуждения. Схемы двигателей и генераторов с данным видом возбуждения одинаковы (рис. 9-1). В двигателях независимого возбуждения токи якоря 1а и нагрузки равны: I = 1а, в двигателях параллельного и смешанного возбуждения I= Iа +Ibи в двигателях последовательного возбуждения I = 1а = Iв. С независимым возбуждением от отдельного источника тока обычно выполняются мощные двигатели с целью более удобного и экономичного регулирования величины тока возбуждения. По своим свойствам двигатели независимого и параллельного возбуждения почти одинаковы, и поэтому первые ниже отдельно не рассматриваются.
Рис 10-1 Энергетическая диаграмма двигателя параллельного возбуждения
Энергетическая
диаграмма двигателя
параллельного возбуждения изображена
на рис. 10-1. Первичная мощность Рх является
электрической и потребляется из питающей
сети. За счет этой мощности покрываются
потери на возбуждение рв и электрические потери рдла = PaRa в
цепи якоря, а оставшаяся часть составляет
электромагнитную мощность якоря РЭм = EJa, которая
превращается в механическую мощность
Рмх.
Потери магнитные рмг,
добавочные рд и механические р
Принцип работы двигателя постоянного тока
Принцип работы двигателя постоянного тока основан на использовании явления электромагнитного взаимодействия (правило левой руки).
Для запуска двигателя постоянного тока обе его обмотки – обмотка возбуждения (ОВ) и обмотка якоря (ОЯ) с помощью рубильника, пускателя или другой пусковой аппаратуры включается в питающую сеть постоянного тока на номинальное напряжение U = U ном .
Протекающий по обмотке возбуждения ток возбуждения I В создаёт в статоре магнитный поток возбуждения Ф В , пронизывающий обмотку якоря.
Протекающий по обмотке якоря ток якоря I Я взаимодействует с магнитным потоком возбуждения статора Ф В , в результате чего возникают электромагнитные силы F, действующие на проводники якоря и создающие вращающий электромагнитный момент
М = cM Ф В I Я .
NB. cM — константа момента, определяемая конструкцией электродвигателя.
Под действием вращающего электромагнитного момента М якорь двигателя приходит во вращение и по окончании разгона ротор вращается с частотой
n = ( U – R Я I Я ) / сЕ Ф В .
NB. сЕ — константа ЭДС, определяемая конструкцией электродвигателя;
RЯ IЯ — падение напряжения в обмотке якоря.
При вращении ротора двигателя проводники обмотки якоря пересекают магнитные силовые линии потока возбуждения статора Ф В в результате чего в обмотке якоря наводится ЭДС (правило правой руки)
Е = сЕ Ф В n .
Наведённая в обмотке якоря ЭДС E направлена против приложенного к якорю напряжения (противо-ЭДС) и работа двигателя описывается уравнением электрического равновесия
U = E + RЯ IЯ .
При этом ток, потребляемый якорем двигателя из сети, или рабочий ток двигателя определяется уравнением
IЯ = (U — E)/ RЯ
Электрическая схема двигателя постоянного тока с параллельным возбуждением (РМ — рабочая машина)
30. Основные характеристики электродвигателей постоянного тока. Способы пуска и регулирования частоты вращения. Реверсирование и способы электрического торможения электродвигателей постоянного тока.
Основные характеристики двигателя постоянного тока с параллельным возбуждением
Свойства двигателей постоянного тока в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В настоящее время в промышленности наиболее широкое применение получили двигатели с параллельным возбуждением.
В двигателе с параллельным возбуждением обмотка возбуждения подключена к питающей сети параллельно с обмоткой якоря. В цепь обмотки возбуждения последовательно включается регулировочный реостат RРР, а в цепь якоря — пусковой RПР или регулировочный R* реостат. Характерной особенностью двигателя является то, что ток возбуждения IB не зависит от тока якоря IЯ (тока нагрузки), т. е. при неизменном сопротивлении в цепи обмотки возбуждения, ток возбуждения постоянен IB = const.
Поэтому, пренебрегая размагничивающим действием реакции якоря, можно считать, что магнитный поток двигателя не зависит от нагрузки Ф = ФВ = const.
Принцип действия двигателя постоянного тока — Студопедия
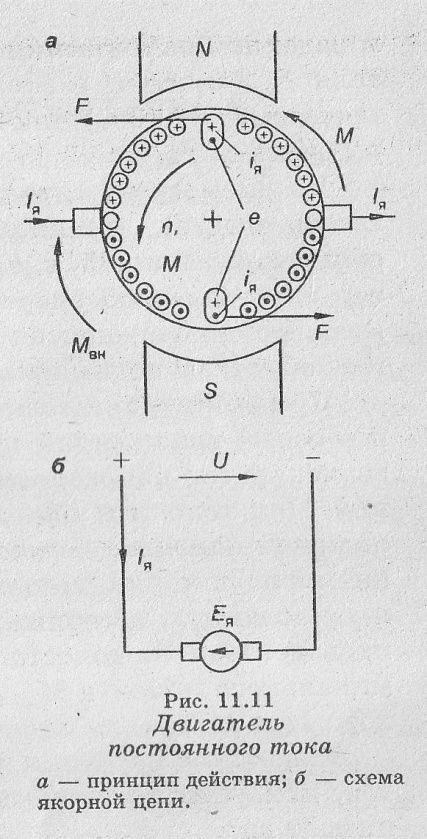
Электрическая энергия подводится к обмоткам якоря и возбуждения двигателя постоянного тока, которые имеют такое же устройство, как и обмотки генератора. Благодаря коллектору подводимый постоянный ток меняет направление в проводниках обмотки якоря, когда при вращении якоря они переходят в другую параллельную ветвь, т. е. попадают в пространство под другим полюсом. Таким образом, направление тока в праводниках обмотки якоря, находящихся под данным полюсом, остается все время неизменным.
Как известно, на проводник с током, находящийся в магнитном поле, действует электромагнитная сила F, направление которой определяется правилом левой руки. При указанном на рисунке направлении тока в обмотке якоря и полярности полюсов якорь машины вращается под действием силы F против часовой стрелки. Таким образом, машина постоянного тока развивает вращающий момент и к ее валу может быть приложен тормозной момент – механическая нагрузка.
При вращении якоря двигателя проводники его обмотки пересекают магнитный поток и в них индуцируется ЭДС, направление которой определяется по правилу правой руки. На рисункепод каждым полюсом условно показан один проводник обмотки якоря с направлением тока Iя в нем и определенным согласно направлению вращения якоря направлением ЭДС якоря Е, значение которой определяется по формуле . Видно, что ЭДС якоря двигателя направлена противоположно току в нем, а следовательно, и подводимому напряжению U. Поэтому ЭДС якоря двигателя называется противо-ЭДС.
Для цепи обмотки якоря двигателя по второму закону Кирхгофа получаем
или
Это уравнение показывает, что приложенное к якорю напряжение уравновешивается противо-ЭДС якоря и падением напряжения в его обмотке. Так как у двигателя Iя>0, то U>Е. Но эта разность невелика (не превышает 8-10%), так как сопротивление обмотки якоря очень мало.
По способу включения обмотки возбуждения по отношению к обмотке якоря двигатели постоянного тока делятся на двигатели параллельного возбуждения, двигатели последовательного возбуждения и двигатели смешанного возбуждения.
Следует особо отметить, что машина постоянного тока является обратимой машиной, т. е. она может работать как генератор электрической энергии, если к ее валу подводится механический вращающий момент, и как двигатель, если к ее обмоткам подводится электрическая энергия.
Сервомоторы— принцип работы, управление и применение
Сервомоторыподразумевают управление с обратной связью с обнаружением ошибок, которое используется для корректировки производительности системы. Также требуется обычно сложный контроллер, часто специальный модуль, специально разработанный для использования с серводвигателями. Серводвигатели — это двигатели постоянного тока, которые позволяют точно контролировать угловое положение. Это двигатели постоянного тока, скорость которых медленно снижается шестернями. Серводвигатели обычно имеют отсечку оборотов от 90 ° до 180 °.Некоторые серводвигатели также имеют отсечку оборотов на 360 ° или более. Но серводвигатели не вращаются постоянно. Их вращение ограничено фиксированными углами.
Серводвигатель представляет собой сборку из четырех элементов: обычного двигателя постоянного тока, редуктора, устройства определения положения и цепи управления. Двигатель постоянного тока соединен с зубчатым механизмом, который обеспечивает обратную связь с датчиком положения, который в основном представляет собой потенциометр. От коробки передач мощность двигателя через шлицевую часть сервопривода подается на рычаг сервопривода.Для стандартных серводвигателей шестерня обычно сделана из пластика, тогда как для сервоприводов большой мощности шестерня сделана из металла.
Серводвигатель состоит из трех проводов — черного провода, подключенного к земле, бело-желтого провода, подключенного к блоку управления, и красного провода, подключенного к источнику питания.
Функция серводвигателя состоит в том, чтобы принимать управляющий сигнал, который представляет желаемое выходное положение вала сервомотора, и подавать питание на его двигатель постоянного тока, пока его вал не повернется в это положение.
Он использует устройство определения положения для определения положения вращения вала, поэтому он знает, в какую сторону должен повернуться двигатель, чтобы переместить вал в заданное положение. Вал обычно не вращается свободно, как двигатель постоянного тока, а может просто повернуться на 200 градусов.
СерводвигательИз положения ротора создается вращающееся магнитное поле для эффективного создания крутящего момента. В обмотке течет ток, создавая вращающееся магнитное поле. Вал передает выходную мощность двигателя.Нагрузка перемещается через передаточный механизм. Высокоэффективный редкоземельный или другой постоянный магнит расположен снаружи вала. Оптический энкодер всегда отслеживает количество оборотов и положение вала.
Работа серводвигателя
Серводвигатель состоит из двигателя постоянного тока, зубчатой передачи, датчика положения и цепи управления. Двигатели постоянного тока питаются от батареи и работают с высокой скоростью и низким крутящим моментом. Узел шестерни и вала, соединенный с двигателями постоянного тока, снижает эту скорость до достаточной скорости и более высокого крутящего момента.Датчик положения определяет положение вала из его определенного положения и передает информацию в схему управления. Схема управления соответственно декодирует сигналы от датчика положения и сравнивает фактическое положение двигателей с желаемым положением и, соответственно, управляет направлением вращения двигателя постоянного тока, чтобы получить требуемое положение. Серводвигатель обычно требует питания постоянного тока от 4,8 В до 6 В.
Управление серводвигателем
Серводвигатель управляется путем управления его положением с помощью метода широтно-импульсной модуляции.Ширина импульса, подаваемого на двигатель, варьируется и отправляется в течение фиксированного периода времени.
Ширина импульса определяет угловое положение серводвигателя. Например, ширина импульса 1 мс приводит к угловому положению 0 градусов, а ширина импульса 2 мс вызывает угловую ширину 180 градусов.
Преимущества:
- Если на двигатель оказывается большая нагрузка, драйвер будет увеличивать ток, подаваемый на катушку двигателя, поскольку он пытается вращать двигатель.Нет никаких отклонений от шага.
- Возможна высокоскоростная работа.
Недостатки:
- Поскольку серводвигатель пытается вращаться в соответствии с командными импульсами, но с запаздыванием, он не подходит для точного управления вращением.
- Более высокая стоимость.
- При остановке ротор двигателя продолжает двигаться вперед и назад на один импульс, так что это не подходит, если вам нужно предотвратить вибрацию
7 Применения серводвигателей
Серводвигатели используются в приложениях, требующих быстрых изменений скорости без перегрева двигателя.
- В промышленности они используются в станках, упаковке, автоматизации производства, погрузочно-разгрузочных работах, преобразовании печати, сборочных линиях и многих других сложных приложениях в робототехнике, станках с ЧПУ или автоматизированном производстве.
- Они также используются в радиоуправляемых самолетах для управления позиционированием и движением лифтов.
- Они используются в роботах из-за плавного включения и выключения и точного позиционирования.
- Они также используются в аэрокосмической промышленности для поддержания гидравлической жидкости в гидравлических системах.
- Они используются во многих радиоуправляемых игрушках.
- Они используются в электронных устройствах, таких как DVD или проигрыватели Blue-ray Disc, для расширения или воспроизведения лотков для дисков.
- Они также используются в автомобилях для поддержания скорости транспортных средств.
Прикладная цепь серводвигателя
Из приведенной ниже прикладной схемы: Каждый двигатель имеет три входа: VCC, заземление и периодический прямоугольный сигнал. Ширина импульса прямоугольной волны определяет скорость и направление серводвигателей.В нашем случае нам просто нужно изменить направление, чтобы устройство могло двигаться вперед, назад и поворачиваться влево и вправо. Если длительность импульса меньше определенного периода времени, двигатель будет вращаться по часовой стрелке. Если ширина импульса превышает этот временной интервал, двигатель будет вращаться против часовой стрелки. Среднюю временную шкалу можно регулировать с помощью встроенного потенциометра внутри двигателя.
3 Различия между шаговым двигателем и серводвигателем:
- Шаговые двигатели имеют большое количество полюсов, магнитных пар, генерируемых постоянным магнитом или электрическим током.У серводвигателей очень мало полюсов; каждый полюс обеспечивает естественную точку остановки вала двигателя.
- Крутящий момент шагового двигателя на низких скоростях больше, чем у серводвигателя того же размера.
- Работа шагового двигателя синхронизируется с помощью сигналов командных импульсов, выдаваемых генератором импульсов. Напротив, работа серводвигателя отстает от командных импульсов.
Теперь у вас есть представление о работе сервометра, если у вас есть какие-либо вопросы по этой теме или проекты электротехники и электроники, оставьте комментарии ниже.
Фото:
Внедрение встроенного управления скоростью для бесщеточных двигателей постоянного тока: Часть 1
Бесщеточные двигатели постоянного тока (BLDC), также известные как двигатели с постоянными магнитами, сегодня используются во многих областях. Новое поколение микроконтроллеров и усовершенствованной электроники решило проблему реализации требуемых функций управления, сделав двигатель BLDC более практичным для широкого диапазона применений.
В этой серии статей мы обсудим основы двигателей BLDC, включая их конструкцию и работу, основные уравнения для создания силы и крутящего момента, а также базовую управляющую электронику, необходимую для правильного использования.
Здесь также рассматривается модуляция на 120 градусов и шестиступенчатый метод управления двигателем, а также то, как модуляция может быть реализована с использованием датчиков Холла и сигналов обратной ЭДС. Включены примеры реализации, в которых используется микроконтроллер (MCU), а также обсуждение необходимых функций встроенных таймеров и обработки прерываний в MCU.
Основы BLDC
Двигатель BLDC состоит из двух основных компонентов: ротора, состоящего из постоянных магнитов, и статора с обмоткой, соединенной с управляющей электроникой.Щетки и коммутационное кольцо, которые являются неотъемлемыми частями универсального двигателя, были исключены из конструкции двигателя BLDC. Вместо этого для генерации правильной последовательности для коммутации используется управляющая электроника.
Из-за своей конструкции двигатель BLDC также известен под другими названиями: синхронный двигатель с постоянными магнитами (PMSM), бесщеточные двигатели с постоянными магнитами или двигатель переменного тока с постоянными магнитами (PMAC). Иногда его просто называют двигателем с постоянными магнитами.
Двигатель BLDC основан на фундаментальном принципе магнетизма, который говорит нам, что одинаковые полюса отталкиваются друг от друга, а противоположные полюса притягиваются.Как показано на рисунке 1а ниже, когда ток проходит через две катушки, он создает магнитное поле с полярностью, которая создает крутящий момент на центральном магните — в данном случае на роторе.
Когда ток проходит в указанном направлении, центральный ротор вращается по часовой стрелке. Когда ротор достигает определенного положения, направление тока изменяется так, что крутящий момент продолжается в том же направлении. При необходимости направление тока снова изменяется, чтобы продолжить создание крутящего момента.
| Рисунок 1а. Магнитное поле из-за тока в катушках статора создает крутящий момент на роторе. |
Однако вместо двух катушек в реальных двигателях BLDC обычно используется шесть катушек, расположенных на расстоянии 60 градусов друг от друга, как показано на рисунке 1b ниже. Затем две катушки одновременно могут быть включены для создания крутящего момента, достаточного для перемещения ротора в желаемое положение. Когда достигается это положение, другие катушки получают питание, чтобы продолжать создавать крутящий момент.
Основы работы и принцип работы шагового двигателя
Основы шагового двигателя
Что такое шаговый двигатель? Шаговый двигатель — это исполнительный механизм, преобразующий электрический импульс в угловое перемещение. Обычно при получении импульсного сигнала шаговый двигатель будет вращаться на фиксированный угол (а именно «угол шага») в соответствии с направлением, заданным для шагового двигателя. Объем углового смещения можно контролировать, контролируя количество импульсов для точного позиционирования.Между тем, скорость вращения и ускорение двигателя можно контролировать, регулируя частоту импульсов для достижения цели управления скоростью.
Принцип работы шагового двигателя
Как работает шаговый двигатель? Ротор шагового двигателя представляет собой постоянный магнит, когда ток течет через обмотку статора, обмотка статора создает векторное магнитное поле. Магнитное поле заставляет ротор вращаться на угол, так что пара магнитных полей ротора и направление магнитного поля статора согласованы.Когда векторное магнитное поле статора поворачивается на угол, ротор также вращается вместе с магнитным полем на угол. Каждый раз, когда подается электрический импульс, двигатель поворачивается еще на один градус. Выходное угловое смещение пропорционально количеству входных импульсов, а скорость пропорциональна частоте импульсов. Измените порядок мощности намотки, двигатель будет реверсивным. Следовательно, он может управлять вращением шагового двигателя, контролируя количество импульсов, частоту и электрическую последовательность каждой фазной обмотки двигателя.
Типы шаговых двигателей
Шаговые двигатели делятся на три типа: шаговые двигатели с постоянными магнитами (PM), шаговые двигатели с переменным сопротивлением (VR) и гибридные шаговые двигатели (HB).
- Шаговый двигатель с постоянным магнитом
- PM обычно двухфазный, с небольшим крутящим моментом и малым объемом; его шаговый угол обычно составляет 7,5 ° или 15 °. Шаговый двигатель
- VR обычно трехфазный, может быть реализован высокий крутящий момент; угол шага обычно составляет 1,5, но шум и вибрация велики; Магнитная цепь ротора шагового двигателя VR изготовлена из магнитомягких материалов.На роторе имеется многофазная обмотка возбуждения. Крутящий момент создается за счет изменения магнитной проводимости. Шаговый двигатель
- HB, показывающий смешение преимуществ PM и VR, делится на 2-фазный, 3-фазный и 5-фазный. Угол шага для 2-фазной схемы обычно составляет 1,8 °, для 3-фазной схемы — 1,2 ° и для 5-фазной схемы — 0,72 °. В основном это широко применяется.
Выбор шагового двигателя
- Угол шага: необходимо выбрать угол шага двигателя в соответствии с требованиями точности нагрузки.Наименьший коэффициент разрешения нагрузки обычно преобразуется в вал двигателя, обратите внимание на угол для каждого коэффициента разрешения, а угол шага двигателя должен быть равен или меньше угла. Как правило, угол шага 2-фазной схемы электродвигатель 0,9 ° / 1,8 °, 3-фазный 1,2 ° и 5-фазный 0,36 ° / 0,72 °. Двухфазный шаговый двигатель ATO имеет угол шага 1,8 градуса, а трехфазный шаговый двигатель — угол шага 1,2 градуса.
- Статический крутящий момент: выберите статический крутящий момент в соответствии с нагрузкой двигателя, при этом нагрузка может быть разделена на инерционную и фрикционную.При прямом запуске двигателя (как правило, с низкой на высокую скорость) следует учитывать два вида нагрузки. При запуске двигателя с ускорением учитывайте инерционную нагрузку; когда двигатель вращается с постоянной скоростью, учитывайте только фрикционную нагрузку. Обычно статический крутящий момент должен быть в пределах 2-3-кратной нагрузки трения.
- Ток: Что касается двигателей с одинаковым статическим крутящим моментом, их характеристики движения сильно различаются из-за разницы в текущих параметрах.О величине тока можно судить по диаграмме характеристики крутящего момента и частоты.
Если вы ищете шаговый двигатель Nema 17, шаговый двигатель Nema 23, шаговый двигатель Nema 34, сайт ATO.com — лучший выбор для вас.
Понимание кривых и температуры двигателя постоянного тока
, автор Дэн Монтоне, PITTMAN Motors / AMETEK Precision Motion Control, Харлейсвилл, Пенсильвания
Характеристики двигателя зависят от температуры. Понимание воздействия тепла и температурных изменений поможет выбрать правильный двигатель для применения.
При применении двигателей постоянного тока для любого типа применения необходимо учитывать температурные эффекты, чтобы двигатель правильно работал. Производительность будет меняться при повышении температуры двигателя. При просмотре кривых двигателя постоянного тока пользователь должен задать вопрос: «Представляют ли эти кривые характеристики двигателя при комнатной температуре, или эти кривые иллюстрируют производительность при максимальной номинальной температуре?» В зависимости от температуры и требуемой рабочей точки на кривой двигателя разница в производительности между «холодными» и «горячими» условиями может быть значительной.
После завершения проектирования двигателя, включая размеры двигателя, магнитную цепь и конфигурацию обмотки двигателя, некоторые характеристики, определяющие рабочие характеристики двигателя, становятся «теоретически» фиксированными; постоянную крутящего момента (K T ), постоянную напряжения (K E ) и сопротивление клемм двигателя (R mt ). Эти три значения будут определять выходной крутящий момент, скорость двигателя и результирующую выходную мощность в любой точке кривой двигателя при заданном напряжении на клеммах, а также общий наклон кривой двигателя.
Таблица 1 — Символы и единицы измерения
СИМВОЛ | ОПИСАНИЕ | ЕДИНИЦ |
α | температурный коэффициент | / ° С |
Я | Текущий | А |
Я 0 | Ток холостого хода | А |
I LR | Ток заторможенного ротора | А |
К E | Постоянная напряжения | В / (рад / с) |
К Т | Постоянная момента | Нм / А |
К (i) | K T или K E (начальная «холодная») | Нм / А или В / (рад / с) |
К (ж) | K T или K E (окончательный «горячий») | Нм / А или В / (рад / с) |
№ | Скорость | об / мин |
№ 0 | Скорость холостого хода | об / мин |
-П | Мощность | Вт |
П из | Выходная мощность | Вт |
пол. макс. | Максимальная мощность | Вт |
P макс. (I) | Максимальная мощность (начальная «холодная») | Вт |
P макс. (Розетка) | Максимальная мощность (конечная «горячая») | Вт |
П убыток | Рассеиваемая мощность | Вт |
т | Крутящий момент двигателя | Нм |
т лр | Момент заторможенного ротора | Нм |
R м | Регулировка двигателя | об / мин / Нм |
R тонн | Сопротивление клемм двигателя | Ом |
R mt (i) | Сопротивление клемм двигателя (начальное «холодное») | Ом |
R mt (ж) | Сопротивление клемм двигателя (конечное «горячее») | Ом |
Ѳ и | Температура двигателя (начальная «холодная») | ° С |
Ѳ из | Температура двигателя (конечная «горячая») | ° С |
Ѳ r | Повышение температуры двигателя | ° С |
В Т | Напряжение на клеммах двигателя | В |
ω | Угловая скорость | рад / с |
ω 0 | Угловая скорость холостого хода | рад / с |
Константы двигателя на самом деле не постоянны
Постоянная крутящего момента и постоянная напряжения определяются на этапе проектирования и являются функцией общей конструкции магнитной цепи.Они всегда равны при использовании единиц СИ. Например, если двигатель K T = 0,1 Нм / А, то двигатель K E = 0,1 В / (рад / с), если в качестве единиц измерения используются Нм и В / (рад / с). Сопротивление клемм двигателя также определяется на этапе проектирования количеством катушек, количеством витков катушки и диаметром магнитопровода. Эти принципы применимы как к щеточным, так и к бесщеточным двигателям постоянного тока.
Фраза «моторные константы», однако, в некоторой степени неверна. Сопротивление обмотки и плотность потока постоянного магнита изменяются при изменении температуры.При повышении температуры двигателя сопротивление обмотки будет увеличиваться в зависимости от температурного коэффициента меди. Плотность потока постоянных магнитов также будет уменьшаться в зависимости от температуры. Изменения в этих двух ключевых компонентах двигателя приведут к увеличению скорости холостого хода двигателя и уменьшению крутящего момента заторможенного ротора двигателя, что изменит общий наклон кривой двигателя. Как только пользователь поймет эту концепцию, становится ясно, что характеристики двигателя, определенные с помощью быстрого динамометрического испытания с двигателем при комнатной температуре, значительно отличаются от рабочих характеристик двигателя при работе с максимальной температурой под нагрузкой.
Кривая двигателя постоянного тока
Кривые рабочих характеристик двигателя постоянного тока могут быть построены при различных условиях. Например, кривая двигателя, показанная на рисунке 1, была создана с помощью быстрого теста на динамометре двигателя. Испытание проводилось путем быстрой загрузки двигателя от холостого хода до заблокированного ротора (остановка) с использованием фиксированного напряжения на клеммах источника питания с низким выходным сопротивлением. Подобный тест проводится для получения «базовой» оценки характеристик двигателя, когда двигатель находится при комнатной температуре.Скорость и ток вала двигателя отображаются как функция крутящего момента двигателя. На основе этого теста и нескольких показаний сопротивления можно определить значения постоянной крутящего момента, напряжения и оконечного сопротивления. Эта информация очень полезна для оценки основных характеристик двигателя и может быть достаточной для приложения, которое требует прерывистой работы с длительным периодом отдыха между каждым рабочим циклом.
В приложениях, таких как повторяющиеся двухточечные перемещения, в приложениях, требующих частого пуска и останова высокоинерционной нагрузки, или в приложениях, требующих, чтобы двигатель работал в течение длительных периодов времени (например, применение вентилятора), данные двигателя, иллюстрирующие производительность при комнатной температуре неадекватна и может привести к неправильному использованию двигателя или превышению максимально допустимой температуры двигателя.
При повышении температуры двигателя сопротивление будет увеличиваться, а постоянная крутящего момента и постоянная напряжения уменьшатся.Это приводит к увеличению скорости холостого хода и уменьшению момента заторможенного ротора. На рисунке 2 показан пример как «холодного», так и «горячего» режима работы одного и того же двигателя постоянного тока. Кривая «горячего» двигателя демонстрирует, насколько могут измениться рабочие характеристики при работе двигателя при повышенной температуре.
График показывает изменения производительности двигателя от комнатной до повышенной температуры, показывая, насколько производительность может измениться с повышением температуры. Влияние температуры на сопротивление обмотки двигателя
Сопротивление обмотки двигателя (R mt ) является основной причиной тепловыделения внутри двигателя.Чтобы любой электродвигатель генерировал крутящий момент, ток должен пропускаться через обмотки двигателя. Медь — отличный проводник, но не идеальный; Физика материала и примеси заставят атомы вибрировать с большей скоростью, чем больше ток. Результатом является постоянное повышение температуры обмоток двигателя. Все металлические проводники имеют положительный температурный коэффициент сопротивления. Это означает, что при повышении температуры сопротивление материала также увеличивается в зависимости от типа используемого проводника.В электродвигателях обычно используется медный проводник, за исключением особых случаев. Во многих короткозамкнутых клетках асинхронных двигателей используется литой алюминий для простоты производства, но в подавляющем большинстве двигателей используется медный магнитный провод. В таблице 2 перечислены примеры обычных металлов, используемых в электрических и электронных устройствах, и их соответствующие температурные коэффициенты (α).
Таблица 2 — Температурные коэффициенты для различных материалов проводников
Материал проводника | α проводник (/ ° C) |
Серебро | 0.0038 |
Золото | 0,0037 |
Медь | 0,0040 |
Алюминий | 0,0043 |
Уравнения 1 и 2 иллюстрируют взаимосвязь между температурой обмотки, сопротивлением обмотки и рассеиваемой мощностью.
Уравнение 1 — Изменение сопротивления обмотки
R mt (f) = R mt (i) x [1 + α (ϴ f — ϴ i )]
Уравнение 2 — Вт, потерянные из-за сопротивления обмотки
P потери = I 2 x R mt
Влияние температуры на плотность магнитного потока
Постоянная крутящего момента двигателя (K T ) и постоянная напряжения (K E ) напрямую связаны с плотностью магнитного потока (B r ) постоянных магнитов.В зависимости от физики используемого материала магнита общая плотность потока будет меняться на определенный процент с увеличением температуры магнита. По мере увеличения температуры материала атомные колебания вызывают «рандомизацию» однажды выровненных магнитных моментов, что приводит к снижению плотности магнитного потока. Если предположить, что двигатель работает в пределах предполагаемого проектного окна, уменьшение плотности магнитного потока является временным и начнет восстанавливаться по мере охлаждения магнита. Однако, если максимально допустимая температура магнитов будет превышена, произойдет частичное размагничивание, которое необратимо изменит характеристики двигателя.
Таблица 3 — Температурные коэффициенты для различных материалов постоянных магнитов
Магнитный материал | α магнит (/ ° C) | T макс (° C) |
Керамика | -0,0020 / ° С | 300 ° С |
Самарий Кобальт (SmCo) | -0.0004 / ° С | 300 ° С |
Алюминий никель-кобальт (AlNiCo) | -0,0002 / ° С | 540 ° С |
Неодим, железо, бор (NdFeB) | -0,0012 / ° С | 150 ° С |
Значения в таблице 3 представляют собой средние значения для классов материалов. Конкретные марки магнитов в пределах класса материалов будут отличаться от значений, приведенных ниже.Например, некоторые марки неодимовых магнитов могут превышать указанную рабочую температуру в 150 ° C. В таблице показаны относительные различия температурных характеристик различных материалов. Если требуются точные значения, рекомендуется проконсультироваться с инженером по применению у производителя двигателя для получения конкретной информации.
Уравнение 3 — Изменение K T и K E (K T = K E при использовании единиц СИ)
K (f) = K (i) x [1 + α магнит (ϴ f — ϴ i )]
Пользователи часто задают вопрос об отношении между K T и K E при повышенной температуре.В случае использования единиц СИ одна всегда будет равна другой; однако оба значения будут одинаково меняться с температурой. В случае использования английских единиц измерения K T и K E выражаются в унциях-дюймах / А (фунт-дюйм / А, фунт-фут / А и т. Д.) И В / krpm. Одно не равно другому при использовании этих единиц, но оба количества будут уменьшаться в одинаковой пропорции с повышением температуры.
Как это влияет на общую производительность двигателя?
При повышенной температуре двигателя наклон кривой двигателя постоянного тока увеличивается в результате увеличения скорости холостого хода и уменьшения крутящего момента заблокированного ротора (иногда называемого крутящим моментом при остановке).На рис. 3 показана общая площадь под кривой конкретного двигателя, которую можно рассматривать как диапазон стабильных характеристик между комнатной температурой и максимальной номинальной температурой двигателя.
Еще один термин, относящийся к наклону кривой двигателя постоянного тока, — «регулирование». Регулировка двигателя описывает, насколько изменится скорость вала при заданном изменении нагрузки на валу при подаче на двигатель фиксированного напряжения на клеммах (работа в системе с разомкнутым контуром).Более пологая кривая скорость-крутящий момент приведет к меньшему изменению скорости вала при увеличении нагрузки. По мере того, как температура двигателя увеличивается и кривая становится более крутой, скорость вала снижается еще больше при таком же увеличении нагрузки.
Уравнение 4a — Теоретическое регулирование двигателя с использованием констант
R m = 9,5493 x [R mt / (K T x K E )]
Уравнение 4b — Регулировка двигателя с использованием кривой производительности
R m = n 0 / T LR
Уравнения 4 и 5 можно использовать, чтобы проиллюстрировать резкое влияние на производительность двигателя в результате уменьшения магнитного потока и увеличения сопротивления обмотки.Хотя будет увеличиваться скорость холостого хода двигателя, а также уменьшаться крутящий момент заблокированного ротора, разница в крутящем моменте заблокированного ротора «холодный» и «горячий» больше по сравнению с разницей между «холодным» и «горячим». -скорость загрузки.
Крутящий момент заблокированного ротора сильно зависит как от сопротивления (R mt ), так и от постоянной крутящего момента (K T ). Хотя на скорость холостого хода также влияет более высокое сопротивление при повышенной температуре, коэффициент сопротивления оказывает гораздо меньшее влияние на скорость холостого хода, потому что он умножается на ток без нагрузки (I 0 ), относительно небольшое число. (сравните уравнения 5b и 5c).
Уравнение 5a — Ток заторможенного ротора двигателя (остановка)
I LR = V T / R mt
Уравнение 5b — Момент заторможенного ротора двигателя (остановка)
T LR = I LR x K T = (V T / R mt ) x K T
Уравнение 5c — Скорость холостого хода двигателя
n 0 = 9,5493 x [(V T — I 0 x R mt ) / K E ]
Пользователь должен быть осторожен при проектировании системы, чтобы гарантировать, что скорость вала соответствует минимальным характеристикам при данной нагрузке и повышенной температуре двигателя.В более сложной системе движения, использующей контроллер с обратной связью, скорость вала можно регулировать в заданном диапазоне, чтобы оставаться «фиксированной» при изменении требований к нагрузке. В следующем примере предполагается, что двигатель работает без обратной связи с регулируемым напряжением на клеммах постоянного тока.
Информация о перепечатке >>
Эта функция является частью I из серии, состоящей из двух частей. Часть II выйдет в декабрьском номере.
AMETEK Precision Motion Control
www.ametek.com
Все о двигателях постоянного тока 101
Двигатели постоянного тока — это электрические устройства, которые потребляют электричество (постоянный ток) и преобразуют его в механическую энергию. Они находят множество применений в современных отраслях, хотя переменный ток является предпочтительным выбором для электроснабжения от сети. Они особенно полезны для машин, которым необходимо управлять с переменной скоростью.
Двигатели постоянного токалегко уменьшить в размерах, что делает их идеальными для компактных устройств и особенно полезными в приложениях с низким напряжением или малой мощностью.Они также хорошо подходят для приложений с высокой мощностью до нескольких мегаватт и там, где требуется изменение скорости на высоких уровнях производительности без сложных систем управления двигателями.
Принцип работы
Самый простой двигатель постоянного тока довольно прост: якорь, по которому течет ток, подключен через щетки и сегменты коммутатора к концу питания, помещен между двумя магнитами (электрическими или постоянными), так что северный и южный полюса перпендикулярно арматуре.
Когда ток течет через якорь (с помощью пускателя двигателя), это вызывает вращательное движение.
Конструкция двигателя постоянного тока
Вот краткий обзор некоторых деталей, используемых в конструкции двигателей постоянного тока:
- Хомут — Это внешняя рама, в которой находится двигатель постоянного тока. Обычно он изготавливается из стали или чугуна. Помимо обеспечения механической прочности всей сборки, он также несет магнитный поток двигателя, который создает обмотка возбуждения.
- Полюс и башмаки полюса — Полюса привинчиваются и привариваются к ярму, и в них размещается обмотка возбуждения. Полюсные наконечники прикреплены к полюсному узлу для поддержки катушек возбуждения и равномерного распределения потока через воздушный зазор.
- Обмотка возбуждения — Часто они сделаны из меди и предварительно намотаны, соединены последовательно через каждый полюс. Обмотка выполнена таким образом, что при подаче напряжения они образуют чередующиеся южный и северный полюса.
- Сердечник якоря — это цилиндрический ротор машины с прорезями для обмотки якоря, состоящий из тонких стальных пластинчатых дисков для уменьшения вихревых токов.
- Обмотка якоря — Обмотка, также бывшая намоткой, обычно изготавливается из меди и устанавливается в пазы якоря. Жилы изолированы от жилы и друг от друга.
- Коммутаторы и щетки — Они физически соединяют обмотку якоря. Коммутатор представляет собой набор медных сегментов, равное количеству катушек якоря. Они изолированы друг от друга и обеспечивают ток для проводов якоря.
Угольные или графитовые щетки опираются на коммутатор и скользят по сегментам при вращении двигателя для подачи тока и поддержания физического контакта.
Типы двигателей постоянного тока
В зависимости от типа обмотки двигатели постоянного тока делятся на 3 типа:
- Двигатели с обмоткой серии — Катушка якоря и катушки возбуждения соединены последовательно, отсюда и название. Направление вращения двигателя можно легко изменить, просто поменяв полярность катушки возбуждения или якоря.
- Двигатели с шунтовой обмоткой — Якорь, катушки и катушки возбуждения питаются от двух источников напряжением разного напряжения или параллельно, чтобы соответствовать требованиям машины.
Чтобы изменить направление, любая из обмоток инвертируется, обычно (для экономии времени) путем инвертирования напряжения на якоре. Так работает большинство двунаправленных скоростных приводов постоянного тока. - Двигатели с комбинированной обмоткой — Этот тип двигателя обладает качествами как параллельных, так и последовательных двигателей. Каждый полюс катушки возбуждения имеет 2 обмотки, одна из которых подключена к якорю параллельно, а другая — последовательно.
Если оба ампер-витка добавляют свой эффект, он работает как двигатель с дополнительным магнитным потоком, а если они работают друг против друга, он действует как двигатель с отрицательным магнитным потоком.Этот способ крепления используется редко, так как при высоких нагрузках он может быть неустойчивым.
В D&F Liquidators мы предлагаем конкурентоспособные цены на большие запасы строительных материалов. Мы — ваш лучший поставщик соединителей и фитингов, изделий из ПВХ, кабелей и электропроводки, предохранительных выключателей, автоматических выключателей, распределительных коробок, различных типов управления двигателями и многого другого. Свяжитесь с нами, чтобы обсудить ваши требования сегодня!
D&F Liquidators обслуживает потребности в строительных материалах для электротехники более 30 лет.Это международная информационная служба площадью 180 000 квадратных метров, расположенная в Хейворде, Калифорния. Он хранит обширный инвентарь электрических разъемов, кабелепроводов, автоматических выключателей, распределительных коробок, проводов, предохранительных выключателей и т. Д. Он закупает электрические материалы у ведущих компаний по всему миру. Компания также ведет обширный инвентарь взрывозащищенной продукции и современных решений в области электрического освещения. Поскольку компания D&F закупает материалы оптом, она имеет уникальную возможность предложить конкурентоспособную структуру ценообразования.Кроме того, он может удовлетворить самые взыскательные запросы и отгрузить материал в тот же день.
Поделитесь этой историей, выберите платформу!
Пресс — Dunkermotoren GmbH
Вы этого не слышите, вы почти не видите, даже если прикоснуться к нему, вы можете только угадать. Что это такое? Ответ на этот вопрос отличается от сказки, с реальным продуктом для приводной техники — электродвигателем постоянного тока BGA 22 без железа, который сконструирован по принципу осевого потока.
Искали и нашли двигатель, который сочетает в себе высокий крутящий момент с малым диаметром конструкции, бесшумной работой и низким самонагревом в трудах Dunkermotoren.BGA 22 прочный, тихий и почти не нагревается даже при полной нагрузке.
Принцип работы
В случае двигателя с осевым потоком магнитные поля формируются в осевом направлении, то есть параллельно валу двигателя, в то время как в двигателях традиционной конструкции магнитное поле формируется радиально. Двигатель работает без железа, что исключает или значительно снижает потери на зубчатое зацепление и возврат в исходное положение. Этот основной принцип уже известен из так называемых «печатных двигателей», которые используются, среди прочего, в бытовой электронике.Однако в Dunkermotoren несколько комбинаций обмоточных и постоянных магнитов расположены друг за другом. Структура показана на изображении 1 . Следующие пластины встречаются по очереди: Поз. 4 — пластина несет обмотку для фазы двигателя и соединена с корпусом и поз. 3 — пластина состоит из магнитов, которые закреплены на стальной пластине и вращаются вместе с валом двигателя. Таким образом, магниты передают крутящий момент на вал и вращаются вместе с ним. Эти стальные пластины образуют прочную фиксацию магнитов на валу и позволяют вращать магниты, в результате чего вращение 3-х намоточных пластин друг с другом (для образования 3-х фаз двигателя) больше не требуется, в результате чего конструкция двигателя значительно усложняется. упрощенный.Магнитный поток показан на изображении 2 . Поскольку двигатель состоит из трех фаз, необходимо как минимум три таких блока, чтобы получить работоспособный двигатель. Количество пакетов с тремя пакетами позволяет при соответствующем увеличении общей длины увеличить производительность двигателя при сохранении того же диаметра конструкции.
В чем сила BGA 22?
Из-за принципа осевого потока корпус BGA 22 выполняет только чисто механическую задачу — поддерживать двигатель в его форме.Поэтому сам корпус может быть выполнен очень тонкостенным. Это позволяет получить магнитную пластину большего диаметра. Для бесстержневых двигателей различных типов необходимо сделать вывод о внешнем диаметре, состоящем из ферромагнитного материала, для радиального потока. Это уменьшает внешний диаметр, на котором создается крутящий момент двигателя. Поскольку магнитные силы действуют на больший диаметр в принципе осевого потока, большой крутящий момент может быть создан с относительно небольшим магнитным материалом.Это обеспечивает экономию материалов с точки зрения устойчивого строительства и, таким образом, снижает зависимость от поставщиков сырья для неодима и диспрозия. Если вы ищете высокую удельную мощность, вы можете выбрать тип, который увеличивает скорость двигателя из существующего ассортимента и с соответствующим планетарным редуктором, снова сниженным до желаемой скорости. Эффективность, обеспечиваемая BGA 22 за счет принципа осевого потока, обеспечивает высокую перегрузочную способность при кратковременной работе. Как видно на номограмме , изображение 3 , двигатель нагревается медленнее, чем двигатели без железа традиционной конструкции того же размера и формы.
Практические преимущества становятся очевидными, когда речь идет о перемещении высоких грузов с более длительными интервалами. Например, подъем и открывание застекленной, а значит, тяжелой балконной двери от замка. Электродвигатель, который встроен в дверную коробку и, таким образом, ограничен диаметром 22 мм, таким образом нагружается трехкратным номинальным крутящим моментом, т.е. е. примерно 6 Нсм. Если принять начальную температуру 25 ° C, двигатель традиционной сборки достигает предельной температуры 155 ° C менее чем за две секунды намотки, в то время как BGA 22 достигает предельной температуры всего 120 ° C через 30 секунд.Таким образом, BGA 22 может обеспечивать в 15 или 3 раза больший номинальный крутящий момент и не достигает предельной температуры аналогичного двигателя 155 ° C.
Что делает возможной плавность BGA 22?
В конструкции двигателя нет щеток, потому что BGA 22 относится к двигателям BLDC. Недостающие силы зацепления, а также отсутствующая регулировка вместе с бесщеточной структурой обеспечивают чрезвычайно высокий уровень плавности. Только шарикоподшипники и коммутация заметны во время работы, хотя и незначительно.При интеграции в устройство пользователю трудно оценить, работает двигатель или нет. Теоретически BGA 22 не имеет дисбаланса. В полевых условиях небольшой дисбаланс возникает из-за производственных допусков. В некоторых случаях это допустимо, но обычно ротор хорошо сбалансирован на специально разработанных машинах. Таким образом, двигатель имеет низкий уровень вибрации и дает окружающей среде, например, к корпусу, который его окружает, практически нет вибраций. Устройство остается спокойным и показывает при изменении скорости уже при простой коммутации блоков никаких резонансных явлений.В этом размере редко встречающаяся векторная коммутация дополнительно улучшает поведение.
Почему BGA 22 не нагревается так сильно, как сопоставимые двигатели его размера?
В отличие от других двигателей без железа такого же размера, BGA 22 имеет высокую удельную мощность при относительно низких температурах обмотки. Производители, предпочитающие конструкцию самонесущей обмотки, придерживаются температурного класса F (155 ° C). Компания Dunkermotoren может ограничить это классом E, который соответствует температуре 120 ° C.Это возможно благодаря хорошему отводу тепла. Обмотки, которые являются самой горячей точкой в двигателе, подключены непосредственно к корпусу посредством теплопроводности. Таким образом, между обмоткой и окружающей средой нет воздушного зазора, изолирующего тепловой поток. Тепло отводится оптимально. Двигатель с меньшим нагревом позволяет продлить срок службы шарикоподшипников и обеспечивает множество преимуществ в применении. Дополнительное оборудование, такое как редукторы и энкодеры, которые доступны в модульной системе Dunkermotoren, менее загружены, что обеспечивает более длительный срок службы.Другие материалы, которые здесь используются, не подвергаются воздействию такой высокой температуры и поэтому могут быть оптимизированы с другой точки зрения. E. г. затраты на приобретение. Устройства со встроенным BGA 22 будут оставаться более холодными во время работы, обеспечивая пользователю приятные ощущения в случае прямого контакта с двигателем. Задача Dunkermotoren — довести этот мотор до стерилизуемой версии. Его низкий уровень нагревания будет тогда оценен при прикосновении к клеточной ткани и будет предпочтительным для использования в приложениях, чувствительных к температуре.
Заключение:
BGA 22 — это бесщеточный двигатель без железа, представленный на рынке, который может подвергаться большим нагрузкам, отличается бесшумной работой и меньшим нагревом, чем ранее известные двигатели сопоставимых размеров. Благодаря имеющейся вариации намотки и модульному конструктивному комплекту его можно спроектировать и настроить практически для любого применения.