Принцип работы асинхронного электродвигателя | Русэлт
Асинхронные электродвигатели – это устройства, главным назначением которых является преобразование энергии переменного электротока в механическую. Своим названием двигатель обязан асинхронному типу вращения ротора относительно частоты вращения магнитного поля, индуцирующего электроток в обмотке статора.
Принцип работы на примере асинхронного электродвигателя трехфазного тока
Этот тип электрического двигателя наиболее часто применяется в различных сферах промышленности. Двигатель имеет 3-и обмотки на статоре, со смещением на 120 градусов. Обмотки запитаны переменным током и объединены по схеме «звезда» или «треугольник». При подаче напряжения на обмотку статора во всех трёх фазах появится магнитный поток.
Вместе с изменением частоты напряжения на обмотке статора, изменяется и магнитный поток. Фазы и магнитные потоки смещены относительно друг друга на сто двадцать градусов. Суммарный магнитный поток и будет вращающимся магнитным потоком, создающим электродвижущую силу (ЭДС).
Преимущества и недостатки асинхронных электродвигателей
Простота эксплуатации и хорошая ремонтопригодность – главные достоинства асинхронного двигателя, сделавшие его наиболее востребованным в очень разных сферах машиностроения и приборостроения. Привлекает и:
- Сравнительно невысокая цена;
- Надёжность
- Несложность подсоединения в общую электроцепь устройств.
Асинхронные электродвигатели имеют и ряд недостатков:
- Трудности с точным регулированием скорости;
- Большой пусковой ток;
- Относительно невысокий коэффициент мощности.
По типу обмотки ротора, короткозамкнутой или фазной, асинхронные двигатели, подразделяются на 2 типа:
- Электродвигатели с короткозамкнутым ротором имеют обмотку, замыкающуюся на сам ротор;
- Электродвигатели с фазным ротором – обмотку с концами, выведенными на щеточно-коллекторный узел.
Преимущество двигателя с фазным ротором в том, что скорость вращения можно регулировать путем подключения дополнительных сопротивлений (реостатного регулирования).
|
Понять принцип действия асинхронного двигателя не сложно, если не пользоваться учебниками для вузов и школ. Зачастую академическая литература лишь препятствует пытливому уму разобраться в работе электромоторов и часто навсегда отбивает охоту заниматься изысканиями, связанными с электротехникой и электромеханикой. В последнее время у многих людей, не связанных напрямую с наладкой и проектированием машин, появился интерес к сборке самодельных станков, механизмов, летательных аппаратов и самодвижущихся машин. Поэтому в этой статье мы попытались доступно объяснить принцип действия асинхронного электродвигателя без сложных понятий и формул. Работа любого асинхронного двигателя построена на принципе вращающегося магнитного поля. Объяснить это явление можно тем, что магнит при вращении возбуждает в структуре диска индукционные токи или токи Фуко. Они всегда движутся по замкнутому кругу — нигде не начинаясь и нигде не заканчиваясь, и являются, по сути, токами короткого замыкания, которые разогревают металл и от которых обычно пытаются избавиться. Но в нашем случае они полезны, т.к. порождают во вращаемом диске магнитное поле, которое дальше взаимодействует с полем постоянного магнита. В асинхронных электродвигателях всё происходит по тому же принципу, только чтобы получить вращающееся поле, используют не постоянный магнит, а обмотки статора, в которых создаётся поле вращения. Первый трёхфазный асинхронный двигатель был сделан русским учёным Доливо-Добровольским. Схема его работы показана на рисунке. Статор состоял из трёх обмоток (полюсов), отдалённых друг от друга на 120°. Вверху показан график синусоидального тока всех трёх полюсов, наложенных на один рисунок. В момент, когда ток одной из фаз равен нулю (отмечено пунктиром), две другие имеют значения близкие к максимальным и отличаются по направлению тока. Так между двумя работающими обмотками создаются магнитное поле. В следующий момент ситуация меняется – один из работающих полюсов отключается, оставшийся в работе меняет полярность (т.к. в обмотке меняется направление тока), а полюс только что включившийся в работу, поддерживает сместившееся магнитное поле. Основной принцип работы асинхронного двигателя, созданного в позапрошлом веке, остаётся актуальным и для современных электродвигателей. Только вместо дисковых и цилиндровых роторов стали использовать короткозамкнутые роторы по типу «беличья клетка» и фазные роторы. Также изменилась форма обмоток статора – вместо катушек с полюсными наконечниками теперь делают радиальные обмотки, уложенные в пазы. Асинхронные двигатели хороши тем, что они не имеют скользящих контактов (ток в роторе индуцируется бесконтактно), а направление вращения легко поменять, изменив направление тока в одной из обмоток (поменяв фазы на клеммах мотора). Выше была рассмотрена работа статора с одной парой рабочих полюсов (двухполюсного с тремя обмотками). Количество оборотов в минуту такого электромотора равно частоте тока, т. Подведём итоги. Принцип действия асинхронного двигателя основывается на создании в обмотках статора вращающегося магнитного поля, которое пересекает контур ротора и индуцирует в нём электродвижущую силу. Поскольку он замкнут на коротко, то в нём возникает переменный ток. Магнитное поле этого тока вместе с вращающимся магнитным полем статора создают крутящий момент. Ротор начинает крутиться и пытается сравнять свою скорость со скоростью убегающего поля статора. Но как только частота вращения ротора совпадёт с частотой вращения магнитного поля статора, в роторе затухнут все электромагнитные процессы и крутящий момент станет равным нулю. Ротор начинает отставать и магнитное поле статора снова начинает возбуждать контур ротора. Этот процесс будет повторяться всё снова и снова. Таким образом, частота вращения ротора стремится догнать частоту вращения магнитного поля статора, но всё время отстаёт, т. В станкостроении асинхронные двигатели не заменимы. Ни какой другой тип электромоторов не имеет такой высокой износоустойчивости и универсальности. Поэтому такое оборудование как станок для сетки рабицы, правильно-отрезной и просечно-вытяжной станки, выпускаемые на нашем предприятии, оснащены именно асинхронными электроприводами. На видео хорошо объясняется принцип работы асинхронного электродвигателя, его устройство и отличительные особенности • Скачать принцип работы трёхфазного асинхронного двигателя Свежие записи: |
 Как его можно создать? Например, можно взять постоянный магнит и начать вращать его вокруг своей оси – получится вращающееся магнитное поле. А если крутить магнит возле медного диска, то он станет вращаться вслед за магнитом, пытаясь его догнать. Со стороны наблюдателя кажется, что между магнитом и диском есть невидимая вязкая связь. Их движение не синхронно, диск крутится с некоторым отставанием.
Как его можно создать? Например, можно взять постоянный магнит и начать вращать его вокруг своей оси – получится вращающееся магнитное поле. А если крутить магнит возле медного диска, то он станет вращаться вслед за магнитом, пытаясь его догнать. Со стороны наблюдателя кажется, что между магнитом и диском есть невидимая вязкая связь. Их движение не синхронно, диск крутится с некоторым отставанием. Условия для вращения можно создать только в многофазных системах, где ток сдвинут по фазе на определённый градус. В быту используются двухфазные электродвигатели, где вторая фаза создаётся искусственно с помощью сдвигающего конденсатора, катушки или сопротивления. В промышленности применяют трёхфазные системы.
Условия для вращения можно создать только в многофазных системах, где ток сдвинут по фазе на определённый градус. В быту используются двухфазные электродвигатели, где вторая фаза создаётся искусственно с помощью сдвигающего конденсатора, катушки или сопротивления. В промышленности применяют трёхфазные системы.
Однофазный асинхронный двигатель: принцип работы
Особенности устройства и работы
Двигатель имеет простое устройство. Статор укомплектован двумя обмотками: первая обмотка — основная, т.е. рабочая, вторая обмотка — пусковая, которая работает только во время запуска мотора.
Статор укомплектован двумя обмотками: первая обмотка — основная, т.е. рабочая, вторая обмотка — пусковая, которая работает только во время запуска мотора.
Если сравнивать с другими двигателями, у однофазного асинхронного мотора нет момента впуска. Если присмотреться, ротор внешне напоминает клетку для грызунов. Ток одной фазы создает магнитное поле, которое состоит из двух полей. При включении двигателя ротор остается без движения.
Расчет результирующего момента при неподвижном роторе находится в основе магнитных полей, которые образуют два вращающих момента.
Расчет:
Mn = М1 — М2
М — противоположные моменты;
n — частота вращения.
Асинхронный однофазный двигатель: принцип работы
При задействовании неподвижной части наступает вращающий момент. Поскольку он возникает только после запуска, мотор укомплектован отдельным пусковым устройством.
У однофазного асинхронного мотора есть немало отличий от, к примеру, трехфазных. Если говорить об основных, стоит отметить особенности статора.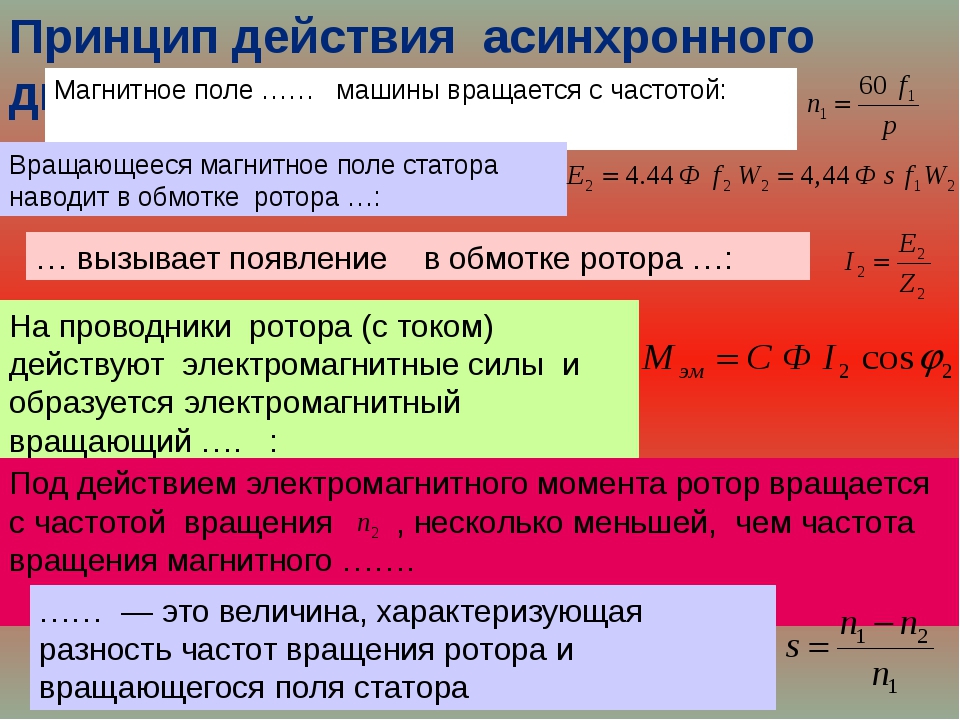 На пазах предусмотрена двухфазная обмотка: основная, т.е. рабочая, и пусковая.
На пазах предусмотрена двухфазная обмотка: основная, т.е. рабочая, и пусковая.
Магнитные оси расположены друг к другу перпендикулярно. При работе основная фаза не вызывает вращение ротора, ось магнитного поля остается неподвижной.
Для расчета обмоток статора разработаны специальные программы.
Какие бывают типы однофазных двигателей
На сегодня существуют следующие типы однофазных асинхронных моторов: с конденсаторным и бифилярным механизмом. У каждого из механизмов свои особенности, достоинства и недостатки.
Бифилярный пуск
Бифилярная обмотка в постоянном режиме не используется, поскольку при таком использовании падает значение КПД. С увеличением оборотов, она обрывается. Обмотка пуска включается на пару секунд, расчет работы по 3 сек до 30 раз в час. Если будет превышен запуск, витки перегреются.
Конденсаторный пуск
Фаза расщепленная, цепь вспомогательной обмотки начинает работать при запуске. Для того, чтобы был достигнут пусковой момент, необходимо создать круговое магнитное поле. Для наилучшего пускового момента используется конденсатор. Моторы с включенными конденсаторами в цепи называются конденсаторными и работают на основе вращения поля магнитов. У конденсаторного мотора предусмотрено две катушки, которые находятся под постоянным напряжением.
Для наилучшего пускового момента используется конденсатор. Моторы с включенными конденсаторами в цепи называются конденсаторными и работают на основе вращения поля магнитов. У конденсаторного мотора предусмотрено две катушки, которые находятся под постоянным напряжением.
Основные принципы работы
В основе принципа работы находится короткозамкнутый ротор. Магнитное поле имеет вид двух кругов с противоположными последовательностями, они двигаются в разные стороны с одинаковой скоростью. Достаточно разогнать ротор в нужную сторону, чтобы он продолжил движение в ту же сторону.
Именно поэтому для запуска однофазного асинхронного двигателя используют кнопку пуска. С ее нажимом статор начинает работу. Токи заставляют вращаться магнитное поле, в воздушном зазоре появляется магнитная индукция. Всего спустя несколько секунд разгон ротора равняется номинальной скорости.
Если кнопку пуска отпустить, электродвигатель переходит с режима двух фаз на одну фазу. Однофазный режим поддерживается за счет переменного поля магнитов, которое из-за скольжения вращается быстрее ротора.
Схема центробежного выключателя
Для эффективной работы однофазного асинхронного двигателя принято встраивать центробежный выключатель, а также реле с замыкающими контактами. Выключатель прерывает пуск статорной обмотки при достижении номинальной скорости ротора. Тепловое реле отключает двухфазную обмотку при перегреве. Это оптимальная комплектация мотора, которая обеспечит безопасную и надежную работу оборудования на долгие годы.
Изменение направления роторного вращения происходит при перемене направления тока в любой из фаз обмотки при запуске. Для этого достаточно нажать пусковую кнопку и переустановить одну или две металлические пластины. Для образования фазового сдвига необходимо добавить в цепь конденсатор или дроссель, резистор.
При запуске двигателя работает две фазы, потом — только одна. Как видите, асинхронный однофазный двигатель принцип работы имеет достаточно простой и понятный. В отличие от других моторов, с ним просто и легко работать.
В чем достоинства однофазного асинхронного двигателя:
- доступная цена;
- простая конструкция;
- небольшой вес, компактность;
- большая двигательная способность из-за отсутствия коллектора;
- питание от синусоидальной сети.

В чем недостатки однофазного асинхронного двигателя:
- небольшой диапазон регулировки частоты вращения;
- отсутствие или небольшой пусковой момент, низкий КПД.
Асинхронный двигатель. Устройство и принцип действия однофазного и трехфазного асинхронного электродвигателя.
Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии, преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Асинхронные двигатели — это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели. Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках. Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.
Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели. Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых участках. Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть. Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.Устройство и принцип действия асинхронных электродвигателей
1. Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра — намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник (рис. 2).
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник
Более подробные сведения о схемах соединения и условных обозначениях начал и концов обмоток представлены ниже. Ротор двигателя состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в которых располагается обмотка ротора. Различают два вида обмоток ротора: фазную и короткозамкнутую. Фазная обмотка аналогична обмотке статора, соединенной в звезду. Концы обмотки ротора соединяют вместе и изолируют, а начала присоединяют к контактным кольцам, располагающимся на валу двигателя. На контактные кольца, изолированные друг от друга и от вала двигателя и вращающиеся вместе с ротором, накладываются неподвижные щетки, к которым присоединяют внешние цепи. Это позволяет, изменяя сопротивление ротора, регулировать скорость вращения двигателя и ограничивать пусковые токи. Наибольшее применение получила короткозамкнутая обмотка типа «беличьей клетки». Обмотка ротора крупных двигателей включает латунные или медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают или приваривают стержни. Для серийных АД малой и средней мощности обмотку ротора изготавливают путем литья под давлением алюминиевого сплава. При этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения условий охлаждения двигателя, затем пакет напрессовывается на вал 3. (рис. 3). На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.
Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения — это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
2. Принцип действия трехфазных асинхронных двигателей
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости вращения магнита.
Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом — вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
Алиев И.И.
Принцип работы асинхронного двигателя | Эксплуатация электрических машин и аппаратуры | Архивы
Страница 9 из 74
Работа асинхронного двигателя основана на явлении взаимодействия индуктированного тока ротора с магнитным полем статора (рис. 26).
При включении трехфазного двигателя в сеть по его фазам протекают токи, образующие вращающееся магнитное поле, скорость вращения которого равна:
Вращающийся магнитный поток пересекает обмотку ротора и в ней индуктируется э. д. с., направление которой определяется по правилу правой руки. Направления индуктированных э д. с. ротора (рис. 26) отмечены знаком плюс и точкой. В замкнутой обмотке ротора под действием э. д. с. возникают токи такого же направления.
На каждый проводник с током в магнитном поле действует сила, направление которой определяется по правилу левой руки. Под действием сил Fпр (рис. 26) возникает момент М двигателя, ротор разворачивается в направлении вращения магнитного поля со скоростью п, меньшей скорости поля п1. Скорость ротора асинхронного двигателя в принципе не может достичь синхронной скорости. Если допустить, что скорость ротора и магнитного поля равны, то в таком случае обмотка ротора не будет пересекаться магнитным полем, поэтому не возникнет э. д. с., ток ротора и момент двигателя будут равны нулю Ротор уменьшит свою скорость, его обмотка будет пересекаться магнитным полем и вновь возникнет момент двигателя.
Рис. 26. Модель асинхронного двигателя.
Скорость ротора асинхронной машины называют асинхронной скоростью, то есть скорость, неравная синхронной скорости поля, Если скорость ротора п, то роторная обмотка пересекается магнитным полем со скоростью (п1 — п). Отношение скорости пересечения ротора магнитным полем к синхронной скорости называется скольжением машины:
или в процентах
В зависимости от величины и знака скольжения различают три режима работы асинхронной машины: двигательный, генераторный и режим электромагнитного тормоза.
В двигательном режиме направления скорости вращения ротора и магнитного поля совпадают, но скорость ротора меньше поля. Поэтому скольжение положительное и меньше единицы. Двигательный режим асинхронной машины схватывает диапазон скольжения от 1 до 0. В первый момент включения двигателя в сеть ротор неподвижен (п = 0), чему будет соответствовать скольжение S=1. При скорости ротора, равной синхронной (что соответствует синхронному ходу асинхронной машины), скольжение равно нулю. Номинальное скольжение для разных асинхронных двигателей различно, порядок поминального скольжения равен 0,01—0,07 (1—7%).
Скорость вращения ротора двигателя через скольжение выразим формулой:
где скольжение 5 в долях, а не в процентах.
По номинальной скорости двигателя пп, указанной на его щитке, можно определить синхронную скорость п1, число полюсов 2р
и номинальное скольжение S. Допустим, на щитке асинхронного двигателя, включаемого в сеть с частотой f = 50 гЦ, указана номинальная скорость п — 940 об/мин. Помня, что скорость двигателя лишь на несколько процентов меньше синхронной а ряд синхронных скоростей при 50 гЦ представляет числа 3000; 1500; 1000; 750 и т. д. об/мин, то скорость поля для данного двигателя будет равна пх — 1000 об/мин. Число полюсов машины подсчитывают по формуле:
Номинальное скольжение двигателя равно;
Ротор и магнитное поле вращаются в одном направлении. Для изменения направления вращения (реверсирования) нужно изменить направление вращения магнитного поля. Для этого необходимо поменять два любых провода, соединяющих двигатель с сетью.
В генераторном режиме ротор машины, вращаясь в направлении магнитного поля, имеет скорость выше синхронной, чему будет соответствовать отрицательное скольжение.
При генераторном режиме асинхронной машины создается скольжение от нуля до отрицательной бесконечности. Для перевода асинхронного двигателя в режим генератора необходим дополнительный двигатель, который мог бы вращать ротор со скоростью больше синхронной.
В режиме электромагнитного тормоза ротор машины вращается в противоположную сторону по отношению к направлению вращения магнитного поля. Такой режим асинхронной машины будет, если ротор при включенном статоре в сеть принудительно вращать каким-либо другим двигателем против поля и если при вращающемся роторе быстро произвести реверсирование двигателя. В режиме электромагнитного тормоза скорость ротора отрицательна, скольжение больше единицы. Электромагнитному тормозу асинхронной машины соответствуют скольжения от единицы до бесконечности.
Особенности работы асинхронных двигателей / Статьи и обзоры / Элек.ру
Традиционно для кранового электропривода применяются специально разработанные серии электродвигателей переменного и постоянного тока. По геометрии магнитопровода, степени использования электротехнических материалов, электромеханическим характеристикам и конструктивному исполнению такие электродвигатели существенно отличаются от двигателей общепромышленного исполнения.
Режим работы электродвигателей в крановом электроприводе характеризуется широким изменением нагрузок, частыми пусками и торможениями, широким диапазоном изменения скорости ниже и выше номинальной (в электроприводах постоянного тока и частотно- регулируемых электроприводах).
Крановые двигатели рассчитаны для работы в повторно-кратковременном режиме, который характеризуется продолжительностью включения (ПВ) 15, 25, 40 и 60% при продолжительности цикла не более 10 мин. Основным номинальным режимом крановых двигателей переменного тока является ПВ=40%.
Из-за высоких требований к динамике двигателей в переходных процессах пуска и торможения и для снижения расхода энергии при этом двигатели конструируются таким образом, чтобы момент инерции ротора был, по возможности, минимальным. Снижение момента инерции достигается путем уменьшения высоты оси вращения при заданной мощности двигателя.
Электродвигатели имеют повышенный (по сравнению с электродвигателями общепромышленного исполнения) запас прочности механических узлов и деталей. Крепление пакета ротора на валу всегда производится при помощи шпонки.
Традиционно, основное применение в крановых электроприводах находят асинхронные двигатели с фазным ротором. Регулирование скорости и момента в электроприводах с такими двигателями производится включением в цепь ротора пускорегулирующих резисторов. Для получения пониженных (посадочных) скоростей опускания груза применяется режим противовключения или различные специальные схемы включения (например – динамического торможения самовозбуждением).
Существуют также модификации крановых асинхронных двигателей с короткозамкнутым ротором (при мощности до 30 кВт) для применения в электроприводах, имеющих, как правило, низкие номинальные скорости и не требующие их регулирования. Кроме того, существуют модификации крановых электродвигателей в двух и трехскоростном исполнении.
Все эти двигатели рассчитаны на питание от промышленной сети стандартного напряжения 220/ 380 В при частоте 50 Гц. Хотя это не означает, что они не могут работать в составе частотно- регулируемых электроприводов, тем не менее, в последнее время разрабатываются специальные серии асинхронных двигателей, в том числе и крановых, оптимизированные для работы в системах частотного регулирования.
Таким образом, крановые асинхронные двигатели в настоящее время условно можно разделить на электродвигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети, и короткозамкнутые электродвигатели для частотно- регулируемых электроприводов.
Крановые асинхронные двигатели с фазным и короткозамкнутым ротором, предназначенные для питания от промышленной сети
Отечественной промышленностью выпускаются асинхронные крановые электродвигатели с фазным и короткозамкнутым ротором, одно- и двухскоростные. Для применения на кранах общего назначения выпускаются электродвигатели с классом нагревостойкости изоляции F, для кранов и агрегатов металлургического производства — класса H.
Основные серии двигателей: фазные — MTF, MTH, 4MTF, 4MTH, 4MTM и короткозамкнутые – MTKF, MTKH, 4MTKF, 4MTKH. Короткозамкнутые электродвигатели выпускаются мощностью до 30 кВт. Кроме того, для малых мощностей выпускаются двигатели DMTF, DMTKH, AMTF, AMTKH.
Двухскоростные двигатели выпускаются сериями MTKH, 4MTKH и 5АТ.
Двигатели представлены в шести-, восьми- и десятиполюсном исполнениях. Быстроходные обмотки двухскоростных двигателей выпускаются также в четырехполюсном исполнении.
Основное конструктивное исполнение двигателей — горизонтальное на лапах с одним концом вала. Двигатели серии 4МТ отличаются от двигателей серии МТ установочно- присоединительными размерами, двигатели 4МТ выпускаются в соответствии с нормами МЭК.
Электродвигатели всех габаритов изготавливаются в закрытом обдуваемом исполнении, двигатели мощностью свыше 45 кВт, кроме того, в защищенном исполнении с независимой вентиляцией от внешнего вентилятора с электроприводом.
Следуют отметить, что крановые электродвигатели большинство времени работают на номинальных скоростях, где эффективность самовентиляции велика. Поэтому независимая вентиляции в крановых двигателях применяется в электроприводах интенсивного режима работы, где велика доля пусковых и тормозных потерь, и где ее применение позволяет избежать увеличения статической мощности.
Представляет интерес возможность использования крановых асинхронных двигателей с фазным и короткозамкнутым ротором предназначенных для питания от промышленной сети в составе частотно-регулируемого электропривода. В настоящее время имеется положительный опыт эксплуатации асинхронных двигателей мощностью до 55 кВт с закороченным фазным ротором при питании от преобразователей частоты. Такое техническое решение принималось при модернизации кранов, оборудованных традиционными системами кранового электропривода на базе асинхронного двигателя с фазным ротором. Для снижения стоимости такой модернизации сохранялись электродвигатели и, в ряде случаев, пускорегулирующие резисторы, которые применялись в качестве тормозных.
Электродвигатель с фазным ротором, выбранный для работы в традиционной системе кранового электропривода с реостатным регулированием при переводе его на питание от преобразователя частоты (если режим работы механизма не превышается), всегда имеет меньший уровень пусковых потерь. При векторном управлении, как правило, снижаются потери и в установившемся режиме, так как при частичной нагрузке в электроприводе производится оптимизация энергопотребления.
Короткозамкнутые крановые электродвигатели серий МТ и 4МТ мощностью до 30 кВт достаточно широко применяются при создании крановых электроприводов механизмов горизонтального перемещения (например, на башенных кранах), а в ряде случаев и в электроприводах механизмов подъема.
Частотно-регулируемые крановые электродвигатели
Работа асинхронных двигателей в системах частотного регулирования имеет свои особенности. Прежде всего, при частотном управлении значительно снижаются потери энергии в двигателях в пуско-тормозных режимах. Это позволяет переходить на более высокооборотные электроприводы, и при проектировании двигателей основное внимание уделять снижению потерь в обмотках двигателя в номинальном режиме. При проектировании двигателей для системы частотного регулирования учитывается следующее:
- Основные соотношения между геометрическими размерами, принятые для крановых асинхронных двигателей, сохраняются, поскольку определяющим здесь является режим работы, а не система регулирования.
- В современных частотно-регулируемых электроприводах с векторным управлением механические характеристики формируется системой управления преобразователя. Поэтому при проектировании электродвигателей, предназначенных для работы только с преобразователями частоты, можно не предпринимать специальные меры для повышения перегрузочной способности и пускового момента.
- Оптимальные частоты вращения двигателей в системах частного регулирования, как уже было сказано, выше, чем в обычных системах, и составляют 1900-1800 об/мин для легкого и среднего режимов работы и до 1000 — 800 об/мин — для тяжелого режима. Однако при проектировании следует согласовывать максимальную частоту вращения разрабатываемого электропривода и максимальную допустимую частоту вращения редуктора.
- Двигатели должны быть работоспособны при повышении частоты выходного напряжения преобразователя в 1,5-2 раза по отношению к номинальной частоте.
- С целью снижения потерь обмотка ротора двигателя заливается чистым алюминием или выполняется медной, скольжение при этом — минимальное. Регулирование выходного напряжения и частоты двигателя позволяет оптимизировать использование его активных частей и обеспечить работу двигателя в режиме минимальных потерь.
- Возможно исполнение двигателей на нестандартное напряжение, соответствующее выходному напряжению преобразователя частоты.
Все эти мероприятия, а также оптимальное разграничение зон регулирования, позволяют при одинаковой нагрузке снизить в 1,5-1,8 раза мощность двигателя в частотно-регулируемом приводе.
Специальная серия крановых двигателей для частотно-регулируемых электроприводов выпускается отечественной промышленностью. Эта серия включает в себя двигатели типа АД2КД мощностью от 4 до 11 кВт в шести- и четырехполюсном исполнениях с пристроенными дисковыми тормозами и двигатели 4МТКД мощностью от 22 до 110 кВт в шести- и восьмиполюсном исполнениях. Двигатели 4МТКД выполнены с использованием основных узлов традиционных двигателей серии 4МТН и изготавливаются в закрытом обдуваемом исполнении, а также с вентиляцией, не зависимой от внешнего вентилятора с электроприводом.
Асинхронный двигатель в высокодинамичном режиме работы
Асинхронный двигатель на сегодняшний день является наиболее используемым в промышленности, вследствие своей простоты, дешевизны и удобства в эксплуатации. При использовании современных микропроцессорных средств управления и преобразователей частоты возможно их применение в тех отраслях производства, где ранее использовались кривошипно-шатунные механизмы, а также другие сложные механические узлы вращательного и поступательного движения. К таким задачам относится поперечное колебание проволоки в процессе наплавки при сварке. Режим работы двигателя является повторно-кратковременным, причем рабочий цикл не превышает одной секунды.
При использовании преобразователей частоты LENZE 8200 Vector в режиме векторного управления эта задача успешно решается с применением асинхронного двигателя, что было подтверждено проведенным экспериментом.
Тип используемого преобразователя: E82EV251K2C. Мощность преобразователя 250Вт.
Тип асинхронного двигателя: MS7114. Мощность двигателя 250Вт.
Задание направления вращения поступало на преобразователь частоты в виде логического сигнала с контроллера.
Тип используемого контроллера: VIPA112-4BH02
Для эксперимента была реализована схема:
При замыкании контакта К2 подается разрешение на работу преобразователя частоты.
При замыкании контакта К1 на аналоговый вход 1U подается максимальный сигнал задания, выставленный в параметре «С11» — максимальная выходная частота. Во время проведения эксперимента это значение было выставлено равным 70Гц.
При подаче логической единицы на клемму Е4 осуществляется реверс преобразователя при установленном параметре «С0007» равным нулю.
Время ускорения и время замедления в параметрах «С0012«, «С0013» выставлено равным нулю. При этом контроль тока осуществляется за счет правильной настройки параметра «С0022» в соответствии с используемым двигателем.
При этом на экране преобразователя частоты ток двигателя не превышал 50% от номинального для преобразователя. Следует отметить, вал двигателя был отключен от нагрузки, то есть работал на холостом ходу. При этом ток двигателя в статическом режиме не превышал 10% номинального значения для двигателя.
Очевидно, что при увеличении нагрузки на валу двигателя, возрастет как статическая, так и динамическая составляющая тока нагрузки, то есть увеличение нагрузки на двигателе возможно в незначительной степени. Тем не менее, проведенный эксперимент доказал возможность работы асинхронного двигателя совместно с преобразователем частоты в высокодинамичном режиме.
Полезные ссылки
Принцип работы и типы асинхронного двигателя
Асинхронные двигатели — наиболее часто используемые двигатели во многих областях. Их также называют асинхронными двигателями , потому что асинхронный двигатель всегда работает со скоростью ниже синхронной. Синхронная скорость означает скорость вращающегося магнитного поля в статоре.В основном существует 2 типов асинхронных двигателей в зависимости от типа входного питания — (i) однофазный асинхронный двигатель и (ii) трехфазный асинхронный двигатель.
Или они могут быть разделены по типу ротора — (i) двигатель с короткозамкнутым ротором и (ii) двигатель с контактным кольцом или намотанный тип
Основной принцип работы асинхронного двигателя
В двигателе постоянного тока необходимо подавать питание как на обмотку статора, так и на обмотку ротора. Но в асинхронном двигателе только обмотка статора питается переменным током.- Из-за источника переменного тока вокруг обмотки статора образуется переменный магнитный поток. Этот переменный поток вращается с синхронной скоростью.Вращающийся поток называется «вращающимся магнитным полем» (RMF).
- Относительная скорость между RMF статора и проводниками ротора вызывает индуцированную ЭДС в проводниках ротора согласно закону электромагнитной индукции Фарадея. Проводники ротора закорочены, и, следовательно, ток ротора возникает из-за наведенной ЭДС. Поэтому такие двигатели называются асинхронными двигателями . (Это действие аналогично тому, что происходит в трансформаторах, поэтому асинхронные двигатели можно называть вращающимися трансформаторами .)
- Теперь индуцированный ток в роторе также будет создавать вокруг него переменный поток. Этот поток ротора отстает от потока статора. Направление индуцированного тока ротора, согласно закону Ленца, таково, что он будет иметь тенденцию противодействовать причине его возникновения.
- Поскольку причиной возникновения тока ротора является относительная скорость между потоком вращающегося статора и ротором, ротор будет пытаться догнать RMF статора. Таким образом, ротор вращается в том же направлении, что и поток статора, чтобы минимизировать относительную скорость.Однако ротору никогда не удается догнать синхронную скорость. Это основной принцип работы асинхронного двигателя любого типа, однофазный или трехфазный.
Синхронная скорость:
где, f = частота подачи
P = количество полюсов
Скольжение:
Ротор пытается догнать синхронную скорость поля статора, и, следовательно, он вращается. Но на практике ротор никогда не догоняет.Если ротор достигает скорости статора, не будет относительной скорости между потоком статора и ротором, следовательно, не будет индуцированного тока ротора и создания крутящего момента для поддержания вращения. Однако это не остановит двигатель, ротор замедлится из-за потери крутящего момента, крутящий момент снова будет действовать из-за относительной скорости. Вот почему ротор вращается со скоростью, которая всегда меньше синхронной скорости.
Разница между синхронной скоростью (N s ) и фактической скоростью (N) ротора называется скольжением.Каков принцип работы асинхронного двигателя | by Starlight Generator
Асинхронный двигатель
Асинхронный двигатель, также известный как «асинхронный двигатель», представляет собой устройство, которое помещает ротор во вращающееся магнитное поле и получает вращающий момент под действием вращающегося магнитного поля. поле, тем самым вращая ротор.
Статор — это не вращающаяся часть двигателя. Основная задача — создать вращающееся магнитное поле.Вращающееся магнитное поле не достигается механически. Вместо этого он соединен с парой электромагнитов переменным током, так что его свойства магнитного полюса меняются циклически, поэтому он эквивалентен вращающемуся магнитному полю.
Принцип работы
Вращающееся магнитное поле, создаваемое статором (скорость вращения — это синхронная скорость вращения n1), и относительное движение обмотки ротора, линия магнитной индукции, отсекающая обмотку ротора, создает наведенную электродвижущую силу, тем самым генерирование индуцированного тока в обмотке ротора.Индуцированный ток в обмотке ротора взаимодействует с магнитным полем, создавая электромагнитный момент, который заставляет ротор вращаться. Поскольку индуцированный ток постепенно уменьшается по мере того, как скорость ротора постепенно приближается к синхронной скорости, генерируемый электромагнитный крутящий момент также соответственно уменьшается. Когда асинхронный двигатель работает в режиме двигателя, скорость ротора меньше синхронной скорости.
Разница между синхронным двигателем и асинхронным двигателем
Синхронный двигатель и асинхронный двигатель являются наиболее широко используемыми типами двигателей переменного тока.Разница между этими двумя типами заключается в том, что синхронный двигатель вращается со скоростью, привязанной к частоте сети, поскольку он не полагается на индукцию тока для создания магнитного поля ротора. Напротив, асинхронный двигатель требует скольжения: ротор должен вращаться немного медленнее, чем переменный ток, чтобы вызвать ток в обмотке ротора.
Маленькие синхронные двигатели используются в устройствах хронометража, таких как синхронные часы, таймеры в приборах, магнитофонах и прецизионных сервомеханизмах, в которых двигатель должен работать с точной скоростью; Точность скорости — это точность частоты линии электропередачи, которая тщательно контролируется в крупных взаимосвязанных сетевых системах.
Синхронные двигатели доступны от самовозбуждающихся субфракционных размеров в лошадиных силах до мощных промышленных размеров.
Starlight Power обеспечивает синхронный генератор мощностью от 20 до 2500 кВт различных производителей, таких как Stamford, Siemens, Marathon, Engga, Leroy-Somer и генератор переменного тока Starlight. Свяжитесь с нами по электронной почте: [email protected]
В диапазоне дробных лошадиных сил большинство синхронных двигателей используются там, где требуется точная постоянная скорость. Эти машины обычно используются в аналоговых электрических часах, таймерах и других устройствах, где требуется точное время.В промышленных масштабах большой мощности синхронный двигатель выполняет две важные функции. Во-первых, это высокоэффективное средство преобразования энергии переменного тока в работу. Во-вторых, он может работать с опережающим или единичным коэффициентом мощности и тем самым обеспечивать коррекцию коэффициента мощности.
Эксплуатация судовых асинхронных двигателей
Когда трехфазный переменный ток напряжения питания подключаются к трем фазным обмоткам статора, результирующие фазные токи создают многополюсный магнитный поток.
Этот поток физически вращается вокруг сердечника статора посредством переключаемой последовательности токов R-Y-B со скоростью, называемой синхронной скоростью.
Значение синхронной скорости зависит от того, сколько пар магнитных полюсов (p) зафиксировано устройством обмотки статора, и от частоты (f) источника напряжения , подключенного к обмотке статора.
Синхронная частота вращения 6-полюсного двигателя с питанием от 60 Гц составляет 20 об / с или 1200 об / мин
Вращающийся магнитный поток статора прорезает проводники ротора, индуцируя в них переменную ЭДС .
Поскольку проводники ротора соединены вместе на концах, наведенная ЭДС создает токи ротора.
Токи ротора также создают магнитный поток, который взаимодействует с потоком вращения статора, который создает крутящий момент (T) на токопроводящих стержнях ротора.
Реактивное сопротивление ротора зависит от скорости потока резания, которая зависит от скорости ротора.
Направление крутящего момента ротора заставляет ротор вращаться в том же направлении, что и вращающееся магнитное поле.
Направление ротора меняется на противоположное, просто поменяв местами любые два соединения линии питания в клеммной коробке статора.
Меняет направление вращающегося магнитного поля.
Асинхронный двигатель не может нормально работать с синхронной скоростью.
Это связано с тем, что в этом случае проводники ротора будут неподвижны по отношению к вращающемуся магнитному полю.
В роторе не будет индуцироваться ЭДС, не будет тока ротора и крутящего момента.
Даже когда двигатель работает без нагрузки, скорость ротора должна быть немного меньше синхронной скорости, чтобы ток мог индуцироваться в проводниках ротора для создания крутящего момента для преодоления механических вращательных потерь на трение и сопротивление воздуха.
Скорость скольжения — это разница между синхронной скоростью вращающегося магнитного потока и фактической скоростью ротора.
Скольжение обычно выражается в процентах от синхронной скорости .
Если 6-полюсный двигатель работает с частотой 60 Гц и работает со скольжением 5%, то фактическая скорость ротора составляет:
Синхронная скорость составляет 1200 об / мин, а ротор проскальзывает на 5% от 1200 на 60 об / мин, поэтому ротор работает со скоростью 1140 об / мин.
Если момент нагрузки на валу двигателя увеличивается, ротор будет замедляться ( увеличивает скольжение ), что позволяет проводникам ротора сокращать магнитный поток с повышенной скоростью.
Это вызывает больший ток, протекающий в роторе, который соответствует большему току питания статора для удовлетворения повышенного требования к крутящему моменту вала.
Теперь двигатель будет работать на этой новой, немного сниженной скорости. Падение скорости двигателя между холостым ходом и полной нагрузкой очень мало (от 1% до 5%), поэтому асинхронные двигатели считаются машинами с почти постоянной скоростью.
При запуске двигатель развивает больший крутящий момент, чем необходимо для поворота нагрузки, поэтому двигатель и нагрузка ускоряются.
Скорость увеличивается до тех пор, пока на пересечении двух характеристик крутящий момент, развиваемый двигателем, не станет таким же, как крутящий момент, необходимый для нагрузки при этой скорости. Затем двигатель и нагрузка будут работать на этой постоянной скорости, поскольку передаваемый крутящий момент точно соответствует потребляемой мощности.
Профессиональный инструмент для
Электротехнического специалиста (ETO)Лучшая цена на аксессуары FLUKE
1-3-3. Двигатель переменного тока | Корпорация Nidec
Термин «двигатель переменного тока» часто кратко описывается как «двигатель переменного тока».Поэтому в этой книге мы будем следовать этому соглашению.
Двигатели переменного токаусловно подразделяются на коллекторные, синхронные и асинхронные.
Синхронный и асинхронный двигатели являются двигателями переменного тока, скорость вращения которых определяется вращающимся магнитным полем.
В данном случае вращающееся магнитное поле относится к явлению, когда магнитное поле, которое создается при подаче трехфазного, двухфазного или другого многофазного переменного тока к обмотке статора, вращается со скоростью, определяемой частотой кратного -фазный переменный ток (= синхронная скорость).Вращающееся магнитное поле притягивает ротор, заставляя его вращаться. Двигатели переменного тока классифицируются по разнице в способе вращения.
Двигатели переменного тока с вращающимся магнитным полем (общий термин для синхронных и асинхронных двигателей) грубо подразделяются на двигатели, которые работают от 100 В переменного тока (мощность, подаваемая в дом через двухпроводные линии обслуживания), и двигатели, которые используют мощность 200 В переменного тока (распределяется между фабрики и др. по трехпроводным линиям).
Первый называется однофазным двигателем, а второй — трехфазным.
В последнее время трехфазные двигатели все чаще приводятся в действие схемой силового инвертора, использующей полупроводниковое устройство, называемое инвертором. Задача этой конфигурации драйвера состоит в том, чтобы управлять двигателем с частотой вращения и крутящим моментом, предназначенными для данного приложения, путем управления напряжением и частотой с помощью инвертора.
[3] — (1) Коммутаторный двигатель
Коллекторный двигатель — это общее описание двигателей, в которых используется коллекторный ротор, как показано на рис. 1.12.Тип, который в настоящее время все еще используется в большом количестве, — это так называемый универсальный двигатель (также называемый двигателем серии переменного тока или электродвигателем с последовательной обмоткой переменного тока).
Основное применение этого двигателя — пылесосы, электроинструменты и соковыжималки. Другими словами, он используется в областях, где требуется, чтобы двигатель вращался с высокой скоростью за счет использования однофазного источника питания переменного тока.
Слово «универсальный» здесь означает, что двигатель вращается от источника переменного или постоянного тока (то есть от двигателя переменного / постоянного тока).
В принципе, он имеет ту же конструкцию, что и двигатели серии постоянного тока, но при использовании переменного тока необходимо учитывать следующие моменты:
Наклонный тип / тип с прямой канавкойРис. 1.12 Ротор коммутатора
Он имеет обмотку и коммутатор, состоящий из нескольких медных пластин
.
<1> В случае постоянного тока поток статора постоянный, но в случае переменного тока он изменяется. Следовательно, необходимо уменьшить любой вихревой ток, генерируемый изменяющимся потоком, с помощью изолированного сердечника.
<2> Падения напряжения были вызваны только сопротивлением в случае постоянного тока, но с переменным током, помимо падений напряжения, вызванных сопротивлением, выходная мощность также снижается из-за ухудшенного коэффициента мощности из-за фазового сдвига в результате электромагнитной индукции .
[3] — (2) Синхронный двигатель
Под синхронным двигателем понимаются двигатели, скорость вращения которых равна синхронной скорости. К ним относятся следующие три типа:
[3] — (2) —
<1> Реактивный двигательВ реактивном электродвигателе используется статор с распределенной обмоткой (рис.1.13 слева) и явнополюсный ротор с короткозамкнутым ротором (рис. 1.14 справа).
Вначале он вращается как асинхронный двигатель, а затем вращается синхронно с частотой источника питания во время работы. Скорость его вращения различается в диапазоне от 50 Гц до 60 Гц. Этот двигатель обладает сравнительно большим пусковым моментом. Его еще называют реактивным двигателем.
Рис. 1.13 Статор распределенной обмотки (слева) и статор с шестикатушкой сосредоточенной обмотки(справа) Инжир.1.14 (Слева) Ротор с короткозамкнутым ротором (для асинхронного двигателя с короткозамкнутым ротором)
(Справа) Ротор с короткозамкнутым ротором (для реактивного двигателя)
В качестве проводников используются медь, латунь и алюминий.
[3] — (2) —
<2> Гистерезисный двигатель Рис. 1.15 Ротор из полутвердой сталиСталь со слабым постоянным магнитом, не вызывающая намагничивания
В гистерезисном двигателе используется статор с распределенной обмоткой (рис.1.13 Слева) и ротор из полутвердой стали (рис. 1.15).
Поскольку этот двигатель вращается с использованием гистерезисных характеристик, он имеет небольшие неравномерности вращения или вибрации. Кроме того, поскольку нет разницы между пусковым и остановочным моментами, в идеале он должен работать в условиях постоянной нагрузки. Этот мотор могут выпускать только производители, у которых есть специальное кольцо гистерезиса.
[3] — (2) —
<3> Электродвигатель индукционного типаПринцип работы синхронных двигателей индукторного типа заключается в синхронизации движения ротора с частотой тока, подаваемого на катушку статора (электромагнита), и преобразование входной мощности во вращательное движение посредством повторяющегося притяжения и отталкивания.
Другими словами, скорость вращения ротора будет обратной целому числу скорости вращения (синхронной скорости), однозначно определяемой частотой тока. Двигатели можно разделить на два типа в зависимости от конструкции ротора.
- ・ Электродвигатели с кулачковыми полюсами
- ・ Гибридные шаговые двигатели (медленно-синхронные двигатели).
Электродвигатели с кулачковыми полюсами различной номинальной скорости доступны за счет комбинации конструкции двигателя и головки редуктора.
Электродвигатели с кулачковыми полюсами используются в различных приложениях, включая игровые автоматы (автоматы для игры в пинбол), копировальные машины, драйверы камер видеонаблюдения, счетчики записи, автоматические шторы и устройства открытия / закрытия клапанов. Гибридные шаговые двигатели в основном используются в производственном оборудовании.
[3] — (3) Асинхронный двигатель
Обычно его называют асинхронным двигателем, но иногда его называют асинхронным двигателем.
Это общее название двигателей, скорость вращения которых немного ниже синхронной скорости.Существуют следующие три типа. В любом случае используется статор с распределенной обмоткой (рис. 1.13 слева).
[3] — (3) —
<1> Асинхронный двигатель с короткозамкнутым ротором Рис. 1.16 Когда железо растворяется в азотной кислоте, остается только алюминиевая клетка.Слева находится ротор асинхронного двигателя с короткозамкнутым ротором типа
, а справа — ротор реактивного двигателя
.
Ротор с короткозамкнутым ротором (рис.1.14 слева) используется для асинхронного двигателя с короткозамкнутым ротором.
К этому типу относятся силовые двигатели общего назначения для промышленного использования. Когда ротор с короткозамкнутым ротором погружают в азотную кислоту для растворения железа, остается только алюминиевая «клетка», как показано на рис. 1.16. Можно аккуратно отрегулировать характеристическую кривую, отрегулировав форму и материал клеточного проводника ротора.
[3] — (3) —
<2> Вихретоковый двигатель Инжир.1.17 Ротор из мягкой сталиОсновным материалом является цилиндрическая масса из железа.
Для вихретоковых двигателей.
Ротор из мягкой стали (рис. 1.17) используется для роторов вихретоковых двигателей. Он создает большой крутящий момент в начале работы, который падает с увеличением скорости.
[3] — (3) —
<3> Асинхронный двигатель с фазным ротором Рис. 1.18 Обмотка ротораОснащена тремя контактными кольцами для возбуждения ротора
с помощью щетки.
Роторы с обмотками (рис. 1.18) используются в асинхронных двигателях с фазным ротором. Характеристики двигателя можно изменить с помощью переменного резистора, подключенного через контактные кольца. Этот ротор специально используется в больших двигателях.
[3] — (3) —
<4> Однофазный асинхронный двигательМы описали многофазные (трехфазные) асинхронные двигатели в пунктах с <1> по <3> выше.
В нашей повседневной жизни источником питания, с которым большинство людей знакомо, является однофазный источник питания переменного тока.Следовательно, удобны практические двигатели, работающие на однофазном переменном токе. Однофазный асинхронный двигатель соответствует этому требованию. Небольшие двигатели этого типа с диапазоном мощности от нескольких ватт до нескольких сотен ватт широко используются в быту, небольших промышленных и сельскохозяйственных приложениях. Конденсаторные двигатели и однофазные асинхронные двигатели с экранированными полюсами являются типичными однофазными асинхронными двигателями.
[3] — (3) —
<4> -a) Конденсаторный двигатель Инжир.1.19 Соотношение фаз конденсаторного двигателяРис. 1.20 Конденсаторный двигатель промышленного назначения
Как показано на рис. 1.19, конденсаторные двигатели конфигурируются путем включения конденсатора в фазу A, так что VA становится ведущей фазой для VM.
Конденсаторные двигатели подразделяются на двигатели с конденсаторным пуском, в которых конденсатор C вставляется только при запуске, двигатели с конденсаторным управлением, в которых постоянный конденсатор C остается вставленным с момента запуска и далее, и двигатели с двоичными конденсаторами, которые уменьшают емкость путем переключения конденсатора, когда двигатель переходит в устойчивое рабочее состояние.
Помимо того, что конденсаторный двигатель предпочтительно используется в бытовых приборах со сравнительно меньшими пусковыми моментами, в промышленности, конденсаторный двигатель используется в небольших приводах ленточных конвейеров и машинах FA (автоматизация производства) из-за простоты использования и высокой экономической эффективности.
[3] — (3) —
<4> -b) Однофазный асинхронный двигатель с расщепленными полюсамиОднофазный асинхронный двигатель с экранированными полюсами представляет собой асинхронный двигатель с короткозамкнутой вспомогательной обмоткой, расположенной в положении, смещенном от основной обмотки на электрический угол менее 90 °.
Вспомогательная обмотка индуцирует напряжение, используя эффект трансформатора основной обмотки для подачи тока короткого замыкания, и создает вращающееся магнитное поле, используя магнитодвижущую силу вспомогательной и основной обмоток.
Будучи менее эффективным из-за потерь, возникающих в затемненной катушке, этот двигатель используется в вентиляторах и других устройствах малой мощности из-за своей простой конструкции.
Чем работа асинхронного двигателя похожа на работу сцепления?
Почему асинхронные машины обычно используются в качестве двигателей?
Асинхронные двигателииспользуются в промышленности и бытовых приборах, потому что они имеют прочную конструкцию, не требующую особого обслуживания, что они сравнительно дешевы и требуют питания только на статоре.
Двигатель переменного тока и асинхронный двигатель одинаковы?
Двумя основными типами двигателей переменного тока являются асинхронные двигатели и синхронные двигатели. Асинхронный двигатель (или асинхронный двигатель) всегда полагается на небольшую разницу в скорости между вращающимся магнитным полем статора и скоростью вала ротора, называемую скольжением, для индукции тока ротора в обмотке переменного тока ротора.
Какие два основных типа асинхронных двигателей?
Существует два основных типа асинхронных двигателей. Типы асинхронных двигателей зависят от входного источника питания.Есть однофазные асинхронные двигатели и трехфазные асинхронные двигатели. Однофазные асинхронные двигатели не являются самозапускающимися двигателями, а трехфазные асинхронные двигатели — это самозапускающиеся двигатели.
Что такое скольжение при работе асинхронного двигателя?
Определение: скольжение в асинхронном двигателе — это разница между скоростью основного потока и скоростью их ротора. Символ S обозначает скольжение. Выражается в процентах от синхронной скорости.
Что такое трехфазный асинхронный двигатель?
Трехфазный асинхронный двигатель переменного тока представляет собой вращающуюся электрическую машину, предназначенную для работы от трехфазного источника питания.Этот трехфазный двигатель также называют асинхронным двигателем. Эти двигатели переменного тока бывают двух типов: асинхронные двигатели с короткозамкнутым ротором и с контактным кольцом.
Какие бывают типы трехфазных асинхронных двигателей?
В зависимости от типа используемого ротора трехфазный асинхронный двигатель классифицируется как: Асинхронный двигатель с короткозамкнутым ротором. Асинхронный двигатель с контактным кольцом или асинхронный двигатель с обмоткой ротора или асинхронный двигатель с фазовой обмоткой.
Как запускается асинхронный двигатель?
Когда источник питания подключен к статору трехфазного асинхронного двигателя, создается вращающееся магнитное поле, ротор начинает вращаться, и запускается асинхронный двигатель.Во время пуска скольжение двигателя равно единице, а пусковой ток очень велик.
В чем разница между асинхронным двигателем и обычным двигателем?
Обмотка статора асинхронного двигателя запитана от источника переменного тока. Синхронный двигатель всегда работает с синхронной скоростью, и скорость двигателя не зависит от нагрузки, но асинхронный двигатель всегда работает с меньшей синхронной скоростью. Если нагрузка увеличилась, скорость асинхронного двигателя уменьшается.
Почему мы используем синхронные двигатели?
обычно синхронные двигатели используются в приложениях, где требуется точная и постоянная скорость.Эти двигатели с низким энергопотреблением включают в себя позиционирующие машины. Они также применяются в приводах роботов. В шаровых мельницах, часах, проигрывателях пластинок также используются синхронные двигатели.
Какой двигатель используется в лифте?
Для лифтов предпочтительны контактные кольца переменного токаили комбинированные двигатели постоянного тока. Коллекторные двигатели шунтового типа предпочтительны в случае однофазной установки. В последних конструкциях лифтов используются трехфазные асинхронные двигатели с электронным управлением частотно-регулируемого привода.
Кто изобрел двигатель постоянного тока?
Какие части асинхронного двигателя?
Детали статора асинхронных двигателей.Статор — это неподвижная часть двигателя, создающая вращающееся магнитное поле для взаимодействия с ротором. Ротор. Ротор является центральным элементом двигателя и прикреплен к валу. Вал. Вал двигателя закреплен внутри ротора и вращается вместе с ним. Подшипники. Корпус.
Что такое нормальное скольжение асинхронного двигателя?
Скольжение обычно выражается в процентах. Скольжение силового асинхронного двигателя составляет от 2 до 3%, когда двигатель работает при номинальной нагрузке. Вышеуказанное значение становится несколько больше для небольших однофазных двигателей.
Что такое зазубрины в асинхронном двигателе?
27 октября, 2020 24 февраля, 2012 по Electrical4U. Важными характеристиками, которые обычно демонстрируют асинхронные двигатели с короткозамкнутым ротором, являются ползание и зубчатое движение. Эти характеристики являются результатом неправильного функционирования двигателя, что означает, что либо двигатель работает с очень низкой скоростью, либо не принимает на себя нагрузку.
Какое значение имеет скольжение в трехфазном асинхронном двигателе?
Первоначальный ответ: Какое значение имеет скольжение в трехфазном асинхронном двигателе? Скольжение создает относительную скорость между RMF и ротором.Это поддерживает крутящий момент, постоянно действующий на него, когда двигатель работает.
Анализ вибрации электрических асинхронных двигателей
Электродвигатель — это электромеханическая машина, преобразующая электрическую энергию в механическую. Электродвигатели делятся на две большие группы: двигатели постоянного тока (DC) и двигатели переменного тока (AC); Двигатели переменного тока делятся на однофазные и многофазные. Многофазные двигатели могут быть асинхронными или синхронными. Тогда асинхронные двигатели могут быть с фазным ротором или короткозамкнутым ротором.Двигатели с короткозамкнутым ротором являются наиболее широко используемыми двигателями в современной промышленности. Асинхронные двигатели с короткозамкнутым ротором — это относительно простые, очень надежные и неприхотливые в обслуживании машины.
Асинхронные двигатели работают по принципу электромагнитной индукции и также известны как асинхронные двигатели, поскольку их скорость вращения (об / мин) не достигает синхронной частоты электродвижущего поля. Асинхронные двигатели производятся для различных применений и требований, рабочая скорость, мощность и КПД, среди других параметров, рассматриваются при проектировании, существуют двигатели малой, средней и большой мощности, они также изготавливаются для работы на различных скоростях; количество полюсов двигателя определяет его рабочую скорость.
| Количество полюсов | Синхронная скорость (об / мин) в зависимости от частоты входной мощности | |
|---|---|---|
| 50 Гц | 60 Гц | |
| 2 | 3000 | 3600 |
| 4 | 1500 | 1800 |
| 6 | 1000 | 1200 |
| 8 | 750 | 900 |
| 10 | 600 | 720 |
| 12 | 500 | 600 |
| 16 | 375 | 450 |
Основные компоненты электродвигателя
Основные компоненты асинхронного электродвигателя с короткозамкнутым ротором:
- Статор
- Ротор
- Рама двигателя
- Торцевой щиток
- Подшипники
- Клеммная коробка
- Опорная база
- Вентилятор охлаждения
Точки измерения вибрации
Как мы уже обсуждали в общих чертах в нашей статье «Где разместить датчик вибрации», в электродвигателе точки измерения вибрации должны соответствовать средней линии вала на корпусе подшипника.Обеспечьте стабильную установку на твердую деталь. По возможности производите измерения в горизонтальном (H), вертикальном (V) и осевом (A) направлениях каждого подшипника.
В крайнем неприводном положении датчик не всегда удастся разместить на средней линии, поскольку его закрывает защитная крышка вентилятора, однако рекомендуется подойти как можно ближе к подшипнику. Точки мониторинга должны быть отмечены, и данные всегда берутся с одних и тех же мест. Некоторые кожухи двигателя изготовлены из алюминия; следовательно, магнит не прилипает; в этих случаях его можно удерживать рукой, сильно надавив на него.Избегайте использования удлинителей, поскольку они подавляют высокочастотные колебания. В некоторых приложениях устанавливаются аксессуары для измерения вибрации; это устройства, которые крепятся с помощью клея или болтов, создавая фиксированный и прочный акселерометр.
Безопасность является приоритетом при выборе точек мониторинга вибрации; мы должны гарантировать, что мы не соприкасаемся с вращающимися или горячими частями, безопасность при сборе данных заботится об инструментах и нашем здоровье.
Типичные отказы электродвигателей, обнаруживаемые с помощью анализа вибрации
Дисбаланс
В электродвигателях дисбаланс обычно вызывается одной из следующих причин:
- Неправильная процедура балансировки в мастерской.
- Неправильный выбор класса качества балансировки.
- Использование шпоночной канавки вне спецификации.
- Не учитывать шпоночный паз при балансировке в мастерской.
- Деформация ротора из-за перегрева.
- Износ или поломка охлаждающего вентилятора.
- Износ или поломка муфты.
- Поломка или неправильная установка охлаждающего вентилятора.
При обнаружении дисбаланса в электродвигателе могут быть рекомендованы следующие действия:
- Просмотрите историю эксплуатации и технического обслуживания, чтобы определить, когда возникла проблема: в процессе эксплуатации, после технического обслуживания, при новом двигателе и т. Д.Это поможет в анализе первопричин.
- Проверьте процедуры и уровень качества балансировки для приложения.
- Осмотрите муфту и вентилятор охлаждения, проверьте ее целостность и состояние.
- Выполните проверку биения , чтобы обнаружить деформации в роторе.
- Проверить калибровку балансировочного станка.
- Выполните точную балансировку в соответствии с применением, критичностью и характеристиками двигателя.
- Проверить вентилятор охлаждения.
Несоосность
В электродвигателях несоосность обычно вызывается одной из следующих причин:
- Неправильная процедура центровки.
- Неправильный расчет стандартов или допусков центровки.
- Тепловое расширение.
- Слабость или несоответствующая опорная база.
- Мягкая опора или обернутая основа мотора.
- Поломки в муфте, чрезмерное биение или износ.
При обнаружении несоосности в электродвигателе можно порекомендовать следующее:
- Оценить процедуры и обучение персонала.
- Выполняйте точную центровку, применяя соответствующие стандарты.
- Измерьте и исправьте мягкую стопу.
- Оцените состояние основания и муфты.
- Оцените влияние теплового расширения и учтите это при процедуре центровки.
Проблемы с подшипником
В электродвигателях проблемы с подшипниками обычно возникают по одной из следующих причин:
- Плохая сборка, чрезмерный предварительный натяг или износ корпуса подшипника.
- Сбои в процедуре смазки, избыток или недостаток смазочного материала.
- Смазка некачественная или несовместимая с областью применения.
- Загрязненная смазка.
- Чрезмерная вибрация во время работы.
- Неисправности заземляющей проводки.
При обнаружении проблем с подшипником в электродвигателе могут быть рекомендованы следующие действия:
- Проанализировать характеристики повреждений: коррозия, эрозия, износ…
- Оцените процедуру сборки подшипника.
- Проверить балансировку и центровку.
- Проверить правильный выбор подшипника.
- Проверить размеры и допуски монтажа в корпусе и роторе.
- Оптимизируйте процесс смазки.
- Проверить заземляющий провод.
Эксцентриситет
В электродвигателях эксцентриситет обычно вызывается одной из следующих причин:
- Чрезмерный износ подшипника или корпуса подшипника.
- Износ ротора или подшипника.
- Несоосность корпусов.
- Деформация ротора.
- Эксцентриситет отверстий муфты или шкивов.
При обнаружении эксцентриситета в электродвигателе могут быть рекомендованы следующие действия:
- Проверьте соосность между корпусом подшипника или торцевыми щитками двигателя.
- Проверить износ корпусов подшипников.
- Измерьте биение в муфте, шкивах и роторе.
Ослабление вращения
В электродвигателях люфт или люфты при вращении обычно вызваны одной из следующих причин:
- Износ подшипников или корпуса.
- Износ подшипников баббита .
- Неправильная регулировка деталей.
При обнаружении зазоров в электродвигателе могут быть рекомендованы следующие действия:
- Проверка размеров корпуса подшипника, подшипников и ротора.
Структурные вопросы
В электродвигателях структурные проблемы обычно возникают по одной из следующих причин:
- Слабые или поврежденные основания из-за коррозии.
- Анкерные болты или болты неисправны.
- Ослабленные винты или анкерные болты.
При обнаружении структурных проблем в электродвигателе могут быть рекомендованы следующие действия:
- Оцените состояние оснований станка и фундамента.
- Оценить состояние анкерных болтов.
- Отрегулируйте болты с правильным моментом затяжки.
Проблемы с электрикой
В электродвигателе проблемы с электричеством обычно возникают по одной из следующих причин:
- Неравномерный воздушный зазор между ротором и статором.
- Ослабленная или сломанная штанга ротора.
- Низкое качество электроэнергии: несимметрия напряжения, гармоники …
- Отказы от преобразователей частоты.
- Избыточная нагрузка.
- Превышение числа пусков и остановок двигателя.
- Проблемы с изоляцией.
При обнаружении электрических проблем в электродвигателе в зависимости от симптомов могут быть рекомендованы следующие действия:
- Выполните анализ качества электроэнергии.
- Изучите воздушный зазор и оцените его происхождение (ротор / статор).
- Выполните электрические испытания двигателя (качество изоляции).
- Оценить целостность соединений в стержнях ротора.
- Проанализируйте количество последовательных запусков.
Резонанс
В электродвигателях резонанс обычно вызывается одной из следующих причин:
- Работайте со скоростью, близкой к критической или собственной частоте системы.
- Изменения жесткости конструкции.
- Изменения скорости, которые приближают двигатель к критической скорости (двигатели с регулируемой скоростью).
При обнаружении резонанса в электродвигателе могут быть рекомендованы следующие действия:
- Выполните тест для расчета критических скоростей.
- Проведите испытание на удар, чтобы проверить, не возбуждается ли какая-либо собственная частота.
- Оцените, изменилась ли жесткость системы.
Другие технологии прогнозирования
Осмотр электродвигателей должен быть комплексным, включая динамические, термические и эксплуатационные испытания.Следующие технологии также применимы к электродвигателям:
| Технология прогнозирования | Обнаруживаемые отказы | |
|---|---|---|
| Термография в двигателе и в силовой цепи | Отсутствие отвода тепла (охлаждения), перегрузка, неисправное соединение, трение, несимметрия нагрузки или напряжения. | |
| Визуальный осмотр | Грязь, необычный шум, недостатки безопасности, структурные проблемы, целостность заземления, плохое охлаждение, влажность, утечки, ослабленные болты, неплотное соединение, недостающие детали, износ. | |
| УЗИ | Проблемы с подшипниками, проблемы с электрикой, проблемы со смазкой. | |
| Анализ масла или трибология | Плохое состояние смазочного материала, загрязненный смазочный материал: вода, гликоль, топливо, твердые частицы; Недостаточное количество смазки, качество и применимость смазки, плохая процедура смазки. | |
| Анализ качества электроэнергии | Неуравновешенность нагрузки, напряжение, частота, сила тока, состояние изоляции, состояние стержней ротора, электрические гармоники, КПД. | |
Нормы и стандарты
Допустимые пределы вибрации для электродвигателей можно найти в стандарте ISO 10816-3. Стандарты NEMA и IEC также устанавливают некоторые критерии приемлемости.
Паспортная табличка двигателя
Паспортная табличка является важным источником полезной информации, и понимание ее является решающим фактором; Данные на табличке — это параметры, которые всегда следует учитывать для обеспечения надежной и эффективной работы, эффективного осмотра и надлежащего обслуживания.Эксплуатация двигателя за пределами его проектных ограничений резко сокращает его срок службы и эффективность. Операторы, инспекторы и специалисты по техническому обслуживанию должны понимать все эти параметры и соотносить их с рабочим и функциональным состоянием машины.
Найдите паспортную табличку двигателей, защитите ее и поддерживайте в хорошем состоянии. Солнечное излучение, загрязнение окружающей среды и влажность влияют на состояние и читаемость таблички.
Show & Tell: асинхронные двигатели переменного тока
Двигатели переменного тока просты в управлении, надежны и экономичны для общего применения.По этим причинам они являются наиболее популярным типом электродвигателей в различных отраслях промышленности. В этом посте мы кратко представим асинхронные двигатели и продемонстрируем, как ими управлять.
Немного истории
Термин «индукция» в асинхронных двигателях (также известных как асинхронные двигатели) относится к электромагнитной индукции, которая является основной теорией работы асинхронных двигателей. Я объясню это в следующем разделе. Согласно Википедии, с изобретением асинхронного двигателя переменного тока связано несколько имен.В 1824 году французский физик Франсуа Араго открыл вращающиеся магнитные поля и ввел термин «Вращения Араго» (или «Диск Араго»). В 1831 году Майкл Фарадей смог объяснить эффекты, представив теорию электромагнитной индукции. В 1879 году Уолтер Бейли продемонстрировал первый примитивный асинхронный двигатель, включив и выключив его вручную. Первые трехфазные асинхронные двигатели переменного тока без коммутатора были независимо изобретены Галилео Феррарисом в 1885 году и Николой Тесла в 1887 году.Оба опубликовали в 1888 году статьи, объясняющие эти технологии. Тесла подал заявку на патенты в США в 1887 году и получил некоторые из этих патентов в 1888 году. Джордж Вестингауз, который в то время разрабатывал систему переменного тока, получил лицензию на патенты Теслы в 1888 году и приобрел опцион на патент США на концепцию асинхронного двигателя Феррариса. развивать технологию дальше. General Electric (GE) начала разработку трехфазных асинхронных двигателей в 1891 году. К 1896 году General Electric и Westinghouse подписали соглашение о взаимном лицензировании на конструкцию ротора со стержневой обмоткой, позже названного ротором с короткозамкнутым ротором.Та же концепция используется и сегодня.
| Асинхронные двигатели идеальны для приложений, требующих непрерывной работы в одном направлении , таких как конвейеры, смесители и вращающиеся знаки. Они рассчитаны на длительный режим работы и обычно служат долгое время из-за своей простой конструкции. |
Конструкция и теория эксплуатации
| На этом изображении показана структура асинхронного двигателя переменного тока, который является основным типом двигателей переменного тока с постоянными разделенными конденсаторами.Вращающийся элемент, ротор, поддерживается в корпусе двигателя двумя шарикоподшипниками для длительного срока службы. Статор расположен вокруг ротора с тонким воздушным зазором. Выходной вал соединен с ротором. Подводящие провода подключаются к обмоткам статора. Фланцевый кронштейн запрессован в корпус двигателя для обеспечения качества. |
Поскольку переменный ток подается на медные обмотки статора, вокруг ротора создается вращающееся магнитное поле со скоростью колебаний переменного тока.Согласно правилу левой руки Флеминга, движущееся магнитное поле индуцирует ток на алюминиевых стержнях (проводнике) в стальном роторе, который генерирует свои собственные противоположные магнитные поля (закон Ленца). Магнитные поля от ротора затем взаимодействуют с вращающимся магнитным полем от статора, и ротор начинает вращаться.
Теория работы асинхронного двигателя переменного тока может быть объяснена с помощью диска Араго , который представляет собой наблюдаемое явление, включающее правило правой руки Флеминга и правило левой руки Флеминга. Хотите узнать больше о теории работы двигателей переменного тока? |
Однофазные асинхронные двигатели
Однофазные асинхронные двигатели предлагаются с различным напряжением и частотой для разных регионов мира. Для США однофазные двигатели обычно предлагаются на 110/115 вольт или 220/230 вольт, которые легко доступны. 60 Гц — типичная частота источника питания.
Вот действующие схемы подключения этих стандартных 3-проводных двигателей. FYI направление вращения двигателя указано, если смотреть со стороны выходного вала двигателя.
Хотя принцип работы должен быть одинаковым для всех однофазных двигателей переменного тока с постоянным разделенным конденсатором, представленных на рынке, цвета выводных проводов могут быть разными для разных производителей.
Для стандартного 3-проводного двигателя цвета проводов обычно белый, красный и черный. Черный всегда связан с нейтралью (N). И белый, и черный подключены к 2 клеммам специального конденсатора.Когда ток (L) подключен к черному или красному через клемму конденсатора, двигатель начнет вращаться в заданном направлении. Для двигателей с клеммной коробкой принцип работы такой же. Однако клеммы обозначены Z2, U2 и U1.
Подключение конденсатора
Для однофазных двигателей конденсатор важен для запуска. Без пускового момента, обеспечиваемого конденсатором, вам пришлось бы помогать запускать двигатель, вручную вращая вал.Это как старые пропеллеры старинного самолета. Убедитесь, что вы не забыли правильно подключить конденсатор. Это был очень распространенный случай устранения неполадок, когда я работал инженером службы поддержки.
Вот пример подключения 4-контактного конденсатора и однофазного двигателя.
| Количество выводов на конденсаторе вас не смущает. На схеме внутренней проводки ниже показано, что две ближайшие клеммы имеют внутреннее соединение. В электрическом отношении это то же самое, что и у традиционных конденсаторов с двумя выводами, которые имеют только по одному выводу с каждой стороны. |
Мы также сняли видео, чтобы продемонстрировать правильный способ подключения этих двигателей, включая автоматические выключатели, переключатели и конденсатор.
Трехфазные асинхронные двигатели
Трехфазные асинхронные двигатели обычно предлагаются в США на 220/230 В и 50/60 Гц. В некоторых случаях предлагается 460 вольт. Трехфазные двигатели могут работать либо с постоянной скоростью, либо с инвертором / частотно-регулируемым приводом для приложений с регулируемой скоростью.
Вот действующие схемы подключения этих стандартных 3-проводных двигателей. FYI направление вращения двигателя указано, если смотреть со стороны выходного вала двигателя.
Для трехпроводного трехфазного двигателя у нас такие же цвета проводов. Три фазы от источника питания обозначены L1 (R), L2 (S) и L3 (T). Подключите красный к L1 (R), белый к L2 (S) и черный к L3 (T). Для двигателей с клеммной коробкой клеммы имеют маркировку U, V и W.Теория работы такая же. Чтобы переключить направление вращения, переключите любое из 2 соединений между R, S и T.
При перегрузке или блокировке вала рекомендуется использовать либо электромагнитный переключатель, либо электронную тепловую функцию инвертора, чтобы предотвратить перегорание двигателя.
Вы наверное обратили внимание, что на схеме подключения нет конденсатора . Для однофазных двигателей требуется конденсатор для создания многофазного источника питания. Для трехфазных двигателей конденсатор не требуется.Мы также сняли видео, чтобы продемонстрировать правильную проводку.
| И последнее, но не менее важное. Не забудьте электрически заземлить двигатели с помощью специальной клеммы защитного заземления (PE), чтобы избежать удара или травм со стороны персонала. |
Это все, что нужно для подключения однофазных и трехфазных асинхронных двигателей. Следите за новостями в следующем посте, где я расскажу о подключении других типов двигателей переменного тока, таких как реверсивные и электромагнитные двигатели с тормозом.
Не забудьте подписаться!