Как регулировать обороты асинхронного электродвигателя 220в
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем.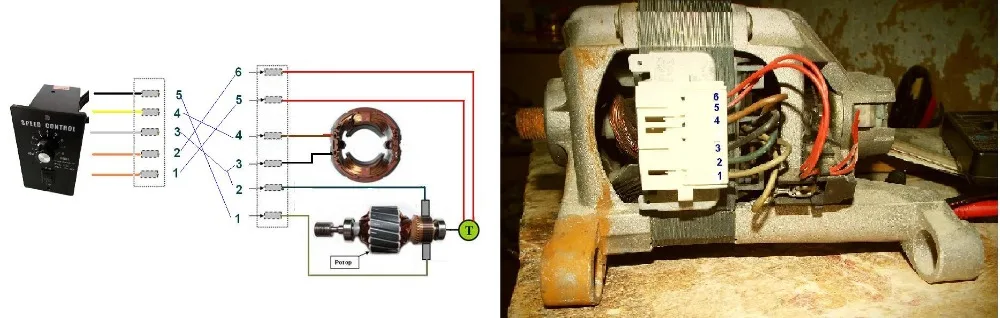 Также не затронем способ изменения количества полюсов обмоток.
Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.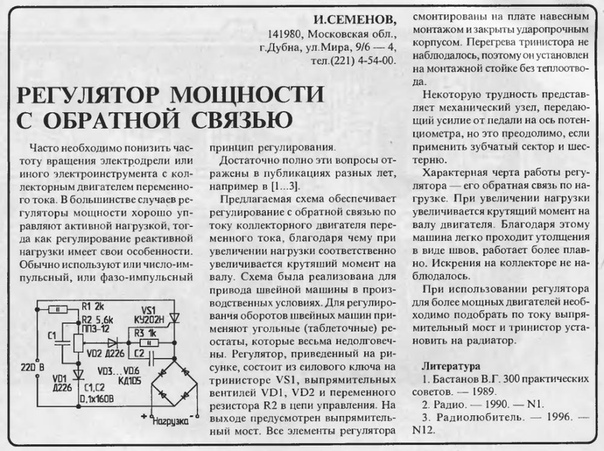
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого.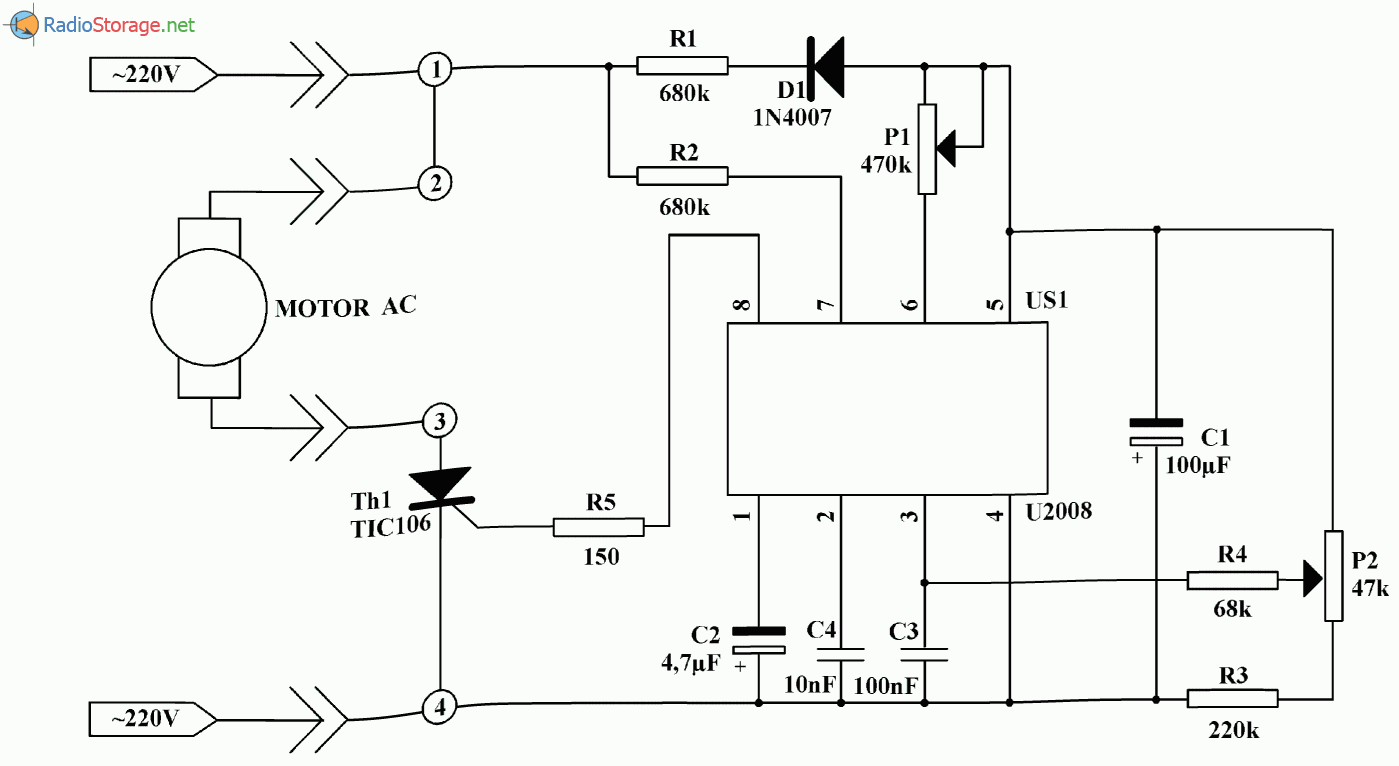 Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Регулирование однофазного асинхронного двигателя с помощью частотного преобразователя
- 0 commentsПрименение Октябрь 27, 2016
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90 о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством./F036M_(6-90V-15A)-02.JPG?1513880782167385)
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу).
 При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен.
 Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса. - Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.

- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Как сделать регулятор оборотов электродвигателя 12в, 220в, 24в
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателяСамый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств. В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
- Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т. д.
д.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото — схема регулятора для коллекторного двигателяВ зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото — схема регулятора оборотов своими рукамиВ описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Описание регулятора оборотов электродвигателя без потери мощности
Каждый из нас дома имеет какой-то электроприбор, который работает в доме не один год. Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.
Но со временем мощность техники слабеет и не выполняет своих прямых предназначений. Именно тогда стоит обратить внимание на внутренности оборудования. В основном проблемы возникают с электродвигателем, который отвечает за функциональность техники. Тогда стоит обратить свое внимание на прибор, который регулирует обороты мощности двигателя без снижения их мощности.Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
Самостоятельное изготовление регулятора оборотов электродвигателя
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения.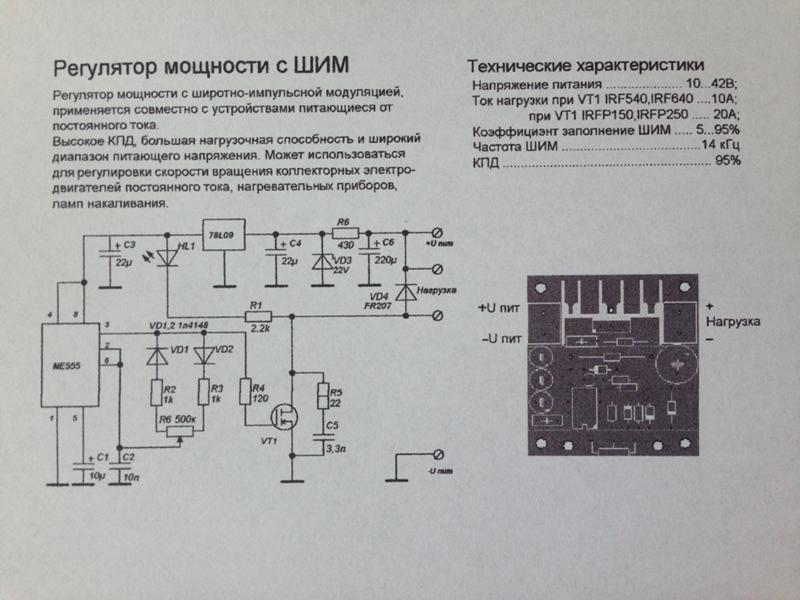 Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов.
 Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Регулятор скорости вращения асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Регулятор скорости вращения асинхронного электродвигателя.
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Вопросы, как всегда в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
Частотник для однофазного электродвигателя, принцип действия
С все более увеличивающимся ростом автоматизации в бытовой сфере появляется необходимость в современных системах и устройствах управления электродвигателями.
Управление и преобразование частоты в небольших по мощности однофазных асинхронных двигателях, запускаемых в работу с помощью конденсаторов, позволяет экономить электроэнергию и активирует режим энергосбережения на новом, прогрессивном уровне.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.
Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
Основные виды однофазных электроприводов
Кондиционеры воздуха, холодильные компрессоры, электрические вентиляторы, обдувочные агрегаты, водяные, дренажные и фекальные насосы, моечные машины используют в своей конструкции асинхронный трехфазный двигатель.
Все типы частотников преобразуют переменное сетевое напряжение в постоянное напряжение. Служат для формирования однофазного напряжения с регулируемой частотой и заданной амплитудой для управления вращения асинхронных двигателей.
Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.
Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.
Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Важно: Однофазный преобразователь частоты, питаясь от однофазной сети напряжением 220В, выдает три линейных напряжения, величина каждого из них по 220В. То есть, линейное напряжение между 2 фазами находится в прямой зависимости от величины выходного напряжения самого частотника.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Частотное регулирование однофазных асинхронных электродвигателей
Первое на что обращаем внимание при выборе частотника для своего оборудования – это соответствие сетевого напряжения и номинального значения тока нагрузки, на который рассчитан двигатель. Способ подключения выбирается относительно рабочего тока.
Главным в схеме подключения является наличие фазосдвигающего конденсатора, он служит для сдвига напряжения, поступающего на пусковую обмотку. Она служит для пускового включения двигателя, иногда после того, как двигатель заработал, пусковая обмотка вместе с конденсатором отключается, иногда остается включенной.
Схема подключения однофазного двигателя с помощью однофазного частотного преобразователя без использования конденсатора
Выходное линейное напряжение устройства на каждой фазе равно выходному напряжению частотника, то есть на выходе будет три напряжения линии, каждое по 220В. Для запуска может использоваться только пусковая обмотка.
Рис. №8. Схема присоединения однофазного асинхронного двигателя через конденсатор
Фазосдвигающий конденсатор не может обеспечить равномерный фазовый сдвиг в пределах границ частот инвертора. Частотник обеспечит равномерный сдвиг фаз. Для того, чтобы исключить из схемы конденсатор, нужно:
- Конденсатор стартера С1 удаляется.
- Вывод обмотки двигателя присоединяем к точке выхода напряжения частотника (используется прямая проводка).
- Точка А присоединяется к СА; В соединяется с СВ; W соединяется к СС, таким образом электродвигатель присоединится напрямую.
- Для включения в обратном направлении (обратная проводка) необходимо В присоединить к СА; А присоединить к СВ; W соединить с СС.
Рис. №9. Схема подключения однофазного асинхронного двигателя без использования конденсатора.
На видео — Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Watch this video on YouTube
Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик. Особенно актуально для часто запускаемых электродвигателей, использующих кратковременные режимы работы.
- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя. Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
- Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
Как видите на схеме, подаваемое на тот же асинхронный однофазный электродвигатель напряжение, проходит через переменный резистор R1 на тиристор D1 и на управляющий электрод симистора T1. Перемещая ручку тиристорного регулятора R1 изменяем и скорость вращения однофазного электродвигателя.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.
Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них. Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Распиновка регулятораЗатем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Если все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Cпособы регулирования скорости асинхронного двигателя
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Устройство для регулирования скорости вращения однофазного конденсаторного асинхронного двигателя — Меандр — занимательная электроника
В статье даётся описание простого устройства для пуска, регулирования скорости вращения, экстренного торможения и реверсирования однофазного асинхронного конденсаторного двигателя с короткозамкнутым ротором.
Предлагаемое техническое решение предназначено для управления работой конденсаторного двигателя (ОКД) с короткозамкнутым ротором, имеющих две одинаковые обмотки на статоре и рабочий фазосдвигающий конденсатор, и является усовершенствованием известного устройства, приведенного в [1].
Устройство [1] содержит цепочку, состоящую из двух элементов, включённых параллельно, — диода и переменного резистора. Один вывод цепочки присоединён к одному зажиму сети, а другой — к зажиму фазосдвигающего конденсатора, соединённому с одним из выводов первой обмотки ОКД, другой вывод которой присоединён к другому выводу сети и ко второму выводу второй обмотки ОКД, первый вывод которой соединён с другим выводом конденсатора. Режим регулирования скорости вращения ОКД обеспечивался переменным резистором путём создания неподвижного магнитного поля регулируемой величины.
Однако известное устройство не обеспечивает экстренное торможение ОКД, а также его экстренное реверсирование и, соответственно, работу в третьем квадранте механических характеристик двигателя.
Поэтому целью данной разработки является расширение функциональных возможностей известного устройства. Поставленная цель достигается тем, что устройство для управления однофазным конденсаторным асинхронным двигателем снабжено однополюсным переключателем на три положения с фиксацией ручки управления в среднем и крайних положениях.
Работа устройства
На рисунке показана принципиальная электрическая схема предлагаемого устройства для управления однофазным конденсаторным асинхронным двигателем.
Устройство содержит однополюсный переключатель SA1 на три положения, с помощью которого можно выбирать направление вращения двигателя М и отключать его от сети, а также цепочку, состоящую из двух элементов, включённых параллельно — диода VD1 и переменного резистора R1.
При замкнутых контактах 1-2 переключателя SA1 обмотка Г1 выполняет функцию главной, а обмотка Г2, включённая через конденсатор С1, выполняет функцию вспомогательной, что обеспечивает одно направление вращения двигателя М. При замкнутых контактах 1-3 переключателя SA1 обмотка Г2 выполняет функцию главной, а обмотка Г1, включённая через конденсатор С1, выполняет функцию вспомогательной, что обеспечивает другое направление вращения двигателя М. Цепочка, состоящая из параллельно соединённых диода VD1 и переменного резистора R1, представляет собой управляющее звено, которое обеспечивает регулирование скорости вращения ОКД путём изменения величины резистора R1.
В исходном предпусковом положении ОКД подвижной контакт 1 переключателя SA1 находится в среднем нейтральном положении и обмотка двигателя М током не обтекается, и двигатель неподвижен. При этом резистор R1 должен быть выведен (R1=0). Для включения ОКД, например, с левым направлением вращения переключатель 8А1 переводят в положение, при котором замкнуты его контакты 1-2. В этом случае обмотка Г1 ОКД обтекается переменным током сети по цепи: вывод ХР1 сети, выведенный резистор R1, замкнутые контакты 1-2 переключателя SA1, главная обмотка Г1 двигателя, вывод ХР2 сети. Одновременно по этой же цепи через конденсатор С1 получает питание вспомогательная обмотка Г2 двигателя. Двигатель М запускается и работает с левым направлением вращения на естественной жёсткой механической характеристике.
Для регулирования скорости вращения ОКД вводят резистор R1, в результате, помимо вращающегося магнитного поля, создаётся ещё дополнительное неподвижное магнитное поле (благодаря наличию диода VD1), что приводит к снижению скорости вращения ОКД, т.е. он переходит на искусственную более мягкую механическую характеристику. Изменяя величину резистора R1, можно получать искусственные характеристики разной жёсткости и, соответственно, разные скорости вращения ОКД. Вместо резистора R1 можно использовать тиристор или транзистор.
Для осуществления режима экстренного торможения ОКД с целью его остановки или экстренного реверсирования при левом направлении вращения переключатель SA1 переводят в положение, при котором будут замкнуты его контакты 1-3. В этом случае напрямую к сети через управляющее звено присоединяется обмотка Г2 двигателя ОКД, т.е. она выполняет функцию главной обмотки, а обмотка П двигателя присоединяется к сети через конденсатор С1, т.е. она выполняет функцию вспомогательной обмотки. В результате магнитное поле ОКД изменяет своё вращение на противоположное при прежнем направлении вращения ротора, т.е. осуществляется экстренное торможение противовключением, что приводит к быстрой остановке ОКД. После остановки двигателя переключатель SA1 переводят в среднее нейтральное положение, отключая, тем самым, двигатель от питающей сети 220 В/50 Гц, в противном случае произойдёт его реверсирование, т.е. ОКД перейдёт из тормозного в основной двигательный режим с противоположным направлением вращения ротора, работая в третьем квадранте механических характеристик.
Таким образом, введение дополнительного элемента в устройство [1], изменение взаимосвязей между элементами устройства, обеспечивает работу ОКД не только в первом квадранте, но и во втором, и в третьем, т.е. в режимах экстренного торможения и остановки двигателя, а также быстрого его реверсирования, что существенно расширяет функциональные возможности известного устройства.
Детали
Переключатель SA1 любой однополюсный на три положения с нейтральным положением (фиксацией) подвижного контакта в среднем и крайних положениях, подходящий по току и напряжению, для конкретного электродвигателя, например, типов ВТ3, ТП1-2, П2Т-13 на напряжение коммутации ~220 В для электродвигателей мощностью до 600 Вт включительно.
Переменный резистор R1 проволочный типа РСП-1, РСП-2 выбирают по току двигателя, сопротивление которого определяется необходимым диапазоном регулирования скорости вращения ОКД. Его номинал подбирают при наладке.
Силовой диод У01 должен быть рассчитан на ток двигателя, так, например, для двигателей мощностью до 0,6 кВт в качестве диодов можно использовать диоды типов КД202К, М, Р на 3 А и напряжения 400…600 В соответственно, или КД227Ж на 5 А/800 В, или 2Д203Г, Д на 10 А/700 В, а также диоды типа B10-10-В10-14 на ток 10 А и напряжение от 700 В и выше.
Номинал рабочего конденсатор С1 (в мкФ) подбирают из расчёта 66Рном (мкФ), где Рном ~ номинальная мощность электродвигателя в кВт (примерно 7 мкФ на 100 Вт мощности), типа К73-17, МБГО-2, КБГ-МП, БГТ или МБГЧ на напряжение не ниже 400 В.
Литература
- Патент Швейцарии № 462932, кл. 21с, 57/30 (Н 02р, 7/40), опубл. 1 5.11.68 — Управление однофазным асинхронным двигателем.
Автор: Константин Коломойцев, г. Ивано-Франковск
Привод асинхронного двигателя с прямым управлением крутящим моментом и магнитным потоком (DTC) модель
Привод асинхронного двигателя с прямым управлением крутящим моментом и магнитным потоком (DTC) model
Library
Simscape / Electrical / Specialized Power Systems / Electric Drives / AC Drives
Описание
Блок DTC Induction Motor Drive (AC4) представляет собой улучшенный скаляр Управляющий привод для асинхронных двигателей с прямым регулированием крутящего момента и магнитного потока.Этот привод имеет регулирование скорости с обратной связью с использованием гистерезисных регуляторов крутящего момента и магнитного потока. Контроль скорости контур выводит эталонный электромагнитный крутящий момент и поток статора машины. Крутящий момент и эталоны потока сравниваются с их оценочными значениями, соответственно, и ошибки подаются. к регуляторам диапазона гистерезиса. Затем выходы контроллеров диапазона гистерезиса используются для получить необходимые стробирующие сигналы для инвертора с помощью оптимальной таблицы переключения.
Основным преимуществом этого привода по сравнению с другими приводами со скалярным управлением является его улучшенная динамический ответ. Этот привод может уменьшить влияние изменения крутящего момента на магнитный поток и наоборот, через оптимальную таблицу переключения. Следовательно, этот привод менее чувствителен к присущий механизму эффект связи (между крутящим моментом и магнитным потоком). Однако это Привод требует такой же обработки сигналов, как и приводы с векторным управлением, что делает его сложность реализации по сравнению с приводами с обратной связью вольт / герц.
Примечание
В Simscape ™
Программное обеспечение Electrical ™ Specialized Power Systems, привод с асинхронным двигателем DTC
блок обычно называют моторным приводом AC4 .
Блок DTC Induction Motor Drive использует эти блоки из Electric Библиотека приводов / основных приводных блоков:
Регулятор скорости (переменного тока)
Прямой регулятор крутящего момента
Шина постоянного тока
Инвертор (трехфазный)
Примечания
Модель — дискретная .Хорошие результаты моделирования были получены с 2 µ с временным шагом. Чтобы смоделировать устройство цифрового контроллера, Система имеет два разных времени выборки:
Время выборки регулятора скорости должно быть кратно D.T.C. время выборки. В последнее время выборки должно быть кратным временному шагу моделирования.
Параметры
Общие
- Режим выходной шины
Выберите способ организации выходных переменных.Если вы выберете
Multiple выходные шины(по умолчанию), блок имеет три отдельные выходные шины для двигателя, преобразователь и переменные контроллера. Если вы выберетеSingle output шина, все переменные выводятся на одну шину.- Механический вход
Выберите между крутящим моментом нагрузки, скоростью двигателя и механическим портом вращения, как механический ввод. По умолчанию:
Torque Tm.Если вы выбираете и применяете крутящий момент нагрузки, выходом будет скорость двигателя в соответствии с следующее дифференциальное уравнение, описывающее динамику механической системы:
Эта механическая система включена в модель двигателя.
Если вы выберете скорость двигателя в качестве механического входа, вы получите электромагнитный крутящий момент как выходной, что позволяет вам представить динамику механической системы извне. В внутренняя механическая система не используется с этим выбором механического входа и инерцией и параметры вязкого трения не отображаются.
Для механического вращающегося порта порт подключения S считается механическим. ввод и вывод. Это позволяет напрямую подключаться к среде Simscape.Механическая система двигателя также включена в привод. и основан на том же дифференциальном уравнении.
См. Механическое соединение двух моторных приводов.
- Использовать имена сигналов в качестве меток
При установке этого флажка
Motor,Conv, иCtrlизмерительные выходы используют имена сигналов для идентификации шины этикетки. Выберите этот вариант для приложений, в которых на этикетках сигналов шины должны быть только буквенно-цифровые символы.Когда этот флажок снят (по умолчанию), выход измерения использует сигнал определение для идентификации меток шины. Этикетки содержат не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink ® .
Вкладка «Асинхронная машина»
На вкладке « Асинхронная машина » отображаются параметры Блок Asynchronous Machine библиотеки Fundamental Blocks (powerlib).
Преобразователи и вкладка шины постоянного тока
Секция выпрямителяСекция выпрямителя преобразователей и постоянного тока На вкладке Bus отображаются параметры блока Rectifier Библиотека фундаментальных блоков (powerlib).Для получения дополнительной информации о параметрах выпрямителя см. на справочную страницу Universal Bridge.
Секция шины постоянного тока- Емкость
Емкость шины постоянного тока (F). По умолчанию
2000e-6.
- Сопротивление
Сопротивление тормозного прерывателя, используемое для предотвращения перенапряжения шины во время двигателя замедление или когда момент нагрузки стремится ускорить двигатель (Ω).По умолчанию
8.- Частота прерывателя
Частота тормозного прерывателя (Гц). По умолчанию
4000.- Напряжение включения
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела полоса гистерезиса. На следующем рисунке показана логика гистерезиса тормозного прерывателя. По умолчанию
320.- Напряжение отключения
Динамическое торможение отключается, когда напряжение на шине достигает нижнего предела полоса гистерезиса.По умолчанию —
310. Показана логика гистерезиса чоппера. ниже:
Секция инвертора Секция преобразователей и постоянного тока На вкладке Bus отображаются параметры блока Inverter Библиотека фундаментальных блоков (powerlib). Для получения дополнительной информации о параметрах инвертора см. на справочную страницу Universal Bridge.
Вкладка «Контроллер»
- Тип регулирования
Этот параметр позволяет выбирать между регулировкой скорости и крутящего момента.По умолчанию
Регулировка скорости.- Тип модуляции
Выберите гистерезисную или пространственную векторную модуляцию. Тип модуляции по умолчанию —
Гистерезис.- Схема
Когда вы нажимаете эту кнопку, появляется диаграмма, показывающая регуляторы скорости и тока схемы появляется.
- Изменения скорости — ускорение
Максимальное изменение скорости, допустимое во время разгона двигателя (об / мин / с).Чрезмерно Большое положительное значение может вызвать пониженное напряжение в шине постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию
1800.- Изменения скорости — замедление
Максимальное изменение скорости, допустимое во время замедления двигателя (об / мин / с). Чрезмерно большое отрицательное значение может вызвать перенапряжение шины постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию
-1800.- Частота отсечки скорости
Частота отсечки фильтра нижних частот первого порядка измерения скорости (Гц).Этот параметр используется только в режиме регулирования скорости. По умолчанию
100.- Время выборки регулятора скорости
Время выборки регулятора скорости (с). Время выборки должно быть кратным шаг по времени моделирования. По умолчанию
100e-6.- ПИ-регулятор — Пропорциональное усиление
Пропорциональное усиление регулятора скорости. Этот параметр используется при регулировании скорости. только режим.По умолчанию
5.- ПИ-регулятор — интегральное усиление
Интегральное усиление регулятора скорости. Этот параметр используется в режиме регулирования скорости. только. По умолчанию
10.- Пределы выходного крутящего момента — отрицательные
Максимальный отрицательный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Нм). По умолчанию
-17,8.- Пределы выходного момента — положительный
Максимальный положительный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Н.м). По умолчанию
17,8.
- Полоса пропускания гистерезиса — крутящий момент
Полоса пропускания гистерезиса крутящего момента. Это значение представляет собой общую распределенную полосу пропускания. симметрично относительно уставки крутящего момента (Н-м). По умолчанию
0,5. В На следующем рисунке показан случай, когда уставка крутящего момента Te * , а полоса гистерезиса крутящего момента установлена на dTe.- Ширина полосы гистерезиса — поток
Ширина полосы гистерезиса потока статора.Это значение представляет собой общую распределенную полосу пропускания. симметрично относительно уставки потока (Wb). По умолчанию
0,01. В на следующем рисунке показан случай, когда уставка потока ψ * , а полоса гистерезиса крутящего момента установлена на dψ.Примечание
Эта полоса пропускания может быть превышена, поскольку используется моделирование с фиксированным шагом. Ставка переходной блок необходим для передачи данных между разными частотами дискретизации.Этот блок вызывает задержку сигналов затвора, поэтому ток может превышать полосу гистерезиса.
- Начальный поток машины
Требуемый начальный поток статора, установленный до того, как модуль привода DTC начнет производят электромагнитный момент. Этот поток создается путем приложения постоянного напряжения вектор на клеммах двигателя (Wb). По умолчанию
0,3.- Время выборки DTC
Время выборки контроллера DTC (с).Время выборки должно быть кратным шаг по времени моделирования. По умолчанию:
20e-6.- Максимальная частота коммутации
Максимальная частота коммутации инвертора (Гц). По умолчанию
20000.- Показать / скрыть элемент управления автонастройкой
Щелкните, чтобы показать или скрыть параметры инструмента управления автонастройкой.
- Желаемое демпфирование [дзета]
Укажите коэффициент демпфирования, используемый для расчета коэффициентов усиления Kp и Ki регулятор скорости.По умолчанию
0,707.- Желаемое время отклика при 5% [Trd (sec)]
Укажите желаемое время установления регулятора скорости. Это время, необходимое для реакция контроллера на достижение и сохранение в пределах 5% целевого значения. По умолчанию
0,01.- Соотношение полосы пропускания (InnerLoop / SpeedLoop)
Укажите соотношение между полосой пропускания и собственной частотой.По умолчанию
30.- Рассчитать усиление ПИ-регулятора
Вычислить Пропорциональное усиление и Интегральное усиление параметров блока Speed Controller (AC). В расчет основан на Желаемое демпфирование [zeta] , Желаемое время отклика при 5% соотношении пропускной способности и (InnerLoop / SpeedLoop) параметров. Вычисленные значения отображаются в маске. блока Drive.Нажмите Применить или ОК , чтобы подтвердить их.
Блок входов и выходов
-
SP Уставка скорости или крутящего момента. Заданное значение скорости может быть ступенчатой функцией, но скорость скорость изменения будет соответствовать рампе ускорения / замедления. Если момент нагрузки и скорости имеют противоположные знаки, ускоряющий момент будет суммой электромагнитного и моменты нагрузки.
-
TmилиWm Механический вход: момент нагрузки (Tm) или скорость двигателя (Wm).Для механического ротационный порт (S), этот ввод удаляется.
-
A, B, C Трехфазные клеммы моторного привода.
-
Wm,TeилиS Механическая мощность: скорость двигателя (Wm), электромагнитный момент (Te) или механический ротационный порт (S).
Когда для параметра Режим выходной шины установлено значение Несколько выходные шины , блок имеет следующие три выходные шины:
-
Motor Вектор измерения двигателя.Этот вектор позволяет вам наблюдать переменные двигателя. с помощью блока Bus Selector.
-
Conv Вектор измерения трехфазных преобразователей. Этот вектор содержит:
Обратите внимание, что все значения тока и напряжения мостов можно визуализировать с помощью блока Multimeter.
-
Ctrl Вектор измерения контроллера. Этот вектор содержит:
Когда для параметра Режим выходной шины установлено значение Одиночный выходная шина , блок группирует выходы Motor, Conv и Ctrl в одну шину вывод.
Технические характеристики моделиБиблиотека содержит набор параметров привода мощностью 3 и 200 л.с. Характеристики эти два диска показаны в следующей таблице.
Технические характеристики привода
Привод 3 л. С. | 200 л.с.привод | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
905 Амплитуда | 220 В | 460 В | |||||||||
Частота | 60 Гц | 60 Гц | 60 Гц | Значения | |||||||
Мощность | 3 л.с. | 200 л.с. | |||||||||
Частота вращения | об / мин | Напряжение | 220 В | 460 В | |||||||
Примеры
Пример ac4_example иллюстрирует моделирование AC4
моторный привод со стандартным режимом нагрузки.
Ссылки
[1] Bose, B. K. Modern Power Electronics and AC Диски . Река Аппер Сэдл, Нью-Джерси: Прентис-Холл, 2002.
[2] Грелет, Г. и Г. Клерк. Actionneurs électriques . Paris: Éditions Eyrolles, 1997.
[3] Krause, P.C. Анализ электрического Машины . Нью-Йорк: McGraw-Hill, 1986.
Представлен в R2006a
Привод асинхронного двигателя с полевым управлением (FOC), модель
Реализация модели привода асинхронного двигателя с полевым управлением (FOC)
Библиотека
Simscape / Электрооборудование / Специализированные системы питания / Электроприводы / Приводы переменного тока
Описание
Блок привода индукционного двигателя с полевым управлением представляет стандарт векторный или роторный управляемый привод для асинхронных двигателей.Этот привод имеет регулирование скорости с обратной связью на основе косвенного или прямого векторного управления. Скорость контур управления выдает эталонный электромагнитный момент и поток ротора машины. В опорные прямые и квадратурные (dq) составляющие тока статора, соответствующие управляемые поток и крутящий момент ротора выводятся на основе стратегии косвенного векторного управления. В затем используются опорные компоненты dq тока статора для получения требуемых стробирующих сигналов. для инвертора через гистерезисный или ШИМ-регулятор тока.
Основным преимуществом этого привода по сравнению с приводами со скалярным управлением является его быстрая динамика. ответ. Внутренний эффект связи между крутящим моментом и магнитным потоком в машине регулируется. за счет развязки (ориентации потока ротора) управления, что позволяет моменту и потоку быть контролируется независимо. Однако из-за сложности вычислений реализация этого Привод требует быстрых вычислительных процессоров или DSP.
Примечание
В Simscape ™
Программное обеспечение Electrical ™ Specialized Power Systems, индукционное управление с ориентацией на поле
Блок моторного привода обычно называют моторным приводом AC3 .
Блок привода индукционного электродвигателя с полевым управлением использует эти блоки из библиотеки Electric Drives / Fundamental Drive Blocks:
Remarks
Модель дискретная. Хорошие результаты моделирования были получены с 2 µ с временным шагом. Для моделирования устройства цифрового контроллера система управления имеет два разных времени выборки:
Время выборки регулятора скорости должно быть кратно времени выборки FOC. В последнее время выборки должно быть кратным временному шагу моделирования.Среднее значение инвертор позволяет использовать большие временные шаги моделирования, поскольку он не генерирует малое время постоянные (из-за демпферов RC), присущие детальному преобразователю. Для времени выборки ВОК 60 мкс, хорошие результаты моделирования были получены для временного шага моделирования 60 мкс. Этот временной шаг не может быть больше, чем временной шаг FOC.
Параметры
Общие
- Режим выходной шины
Выберите способ организации выходных переменных.Если вы выберете
Multiple выходные шины(по умолчанию), блок имеет три отдельные выходные шины для двигателя, преобразователь и переменные контроллера. Если вы выберетеSingle output шина, все переменные выводятся на одну шину.- Уровень детализации модели
Выберите между детальным инвертором и инвертором среднего значения. По умолчанию
Детальный.- Механический вход
Выберите между крутящим моментом нагрузки, скоростью двигателя и механическим портом вращения, как механический ввод.По умолчанию:
Torque Tm.Если вы выбираете и применяете крутящий момент нагрузки, выходом будет скорость двигателя в соответствии с следующее дифференциальное уравнение, описывающее динамику механической системы:
Эта механическая система включена в модель двигателя.
Если вы выберете скорость двигателя в качестве механического входа, вы получите электромагнитный крутящий момент как выходной, что позволяет вам представить динамику механической системы извне. В внутренняя механическая система не используется с этим выбором механического входа и инерцией и параметры вязкого трения не отображаются.
Для механического вращающегося порта порт подключения S считается механическим. ввод и вывод. Это позволяет напрямую подключаться к среде Simscape. Механическая система двигателя также включена в привод. и основан на том же дифференциальном уравнении.
См. Механическое соединение двух моторных приводов.
- Использовать шину в качестве меток
Когда вы установите этот флажок,
Motor,Conv, иCtrlизмерительные выходы используют имена сигналов для идентификации шины этикетки.Выберите этот вариант для приложений, в которых на этикетках сигналов шины должны быть только буквенно-цифровые символы.Когда этот флажок снят (по умолчанию), выход измерения использует сигнал определение для идентификации меток шины. Этикетки содержат не буквенно-цифровые символы, которые несовместимы с некоторыми приложениями Simulink ® .
- Установить без датчика
Когда вы установите этот флажок, скорость двигателя оценивается на основе напряжений на клеммах и токи, основанные на методе адаптивной системы привязки к модели (MRAS).В Вкладка Sensorless содержит параметры контроллера оценки.
Когда этот флажок снят, скорость двигателя измеряется внутренней скоростью. sensor, а вкладка Sensorless не отображается на маске блока.
Вкладка «Асинхронная машина»
На вкладке « Асинхронная машина » отображаются параметры Блок Asynchronous Machine библиотеки Fundamental Blocks (powerlib).
Преобразователи и вкладка шины постоянного тока
Секция выпрямителяСекция выпрямителя преобразователей и постоянного тока На вкладке Bus отображаются параметры блока Universal Bridge библиотека Fundamental Blocks (powerlib).Подробнее об универсальном мосту параметры, см. справку по универсальному мосту страница.
Секция шины постоянного тока- Емкость
Емкость шины постоянного тока (F). По умолчанию
2000e-6.
- Сопротивление
Сопротивление тормозного прерывателя, используемое для предотвращения перенапряжения шины во время двигателя замедления или когда момент нагрузки стремится ускорить двигатель (Ом).По умолчанию
8.- Частота прерывателя
Частота тормозного прерывателя (Гц). По умолчанию
4000.- Напряжение включения
Динамическое торможение активируется, когда напряжение на шине достигает верхнего предела полоса гистерезиса (V). На следующем рисунке показана логика гистерезиса тормозного прерывателя. По умолчанию
320.- Напряжение отключения
Динамическое торможение отключается, когда напряжение на шине достигает нижнего предела полоса гистерезиса (V).Логика гистерезиса чоппера показана на следующем рисунке. По умолчанию
310.
Секция инвертора Секция преобразователей и постоянного тока На вкладке Bus отображаются параметры блока Universal Bridge библиотека Fundamental Blocks (powerlib). Подробнее об универсальном мосту параметры, см. справку по универсальному мосту страница.
Преобразователь среднего значения использует следующие параметры.
- Частота источника
Частота источника трехфазного напряжения (Гц). По умолчанию
60.- Сопротивление в открытом состоянии
Сопротивление в открытом состоянии переключателей инвертора (Ом). По умолчанию
1д-3.
Вкладка «Контроллер»
- Тип регулирования
Это всплывающее меню позволяет выбирать между регулировкой скорости и крутящего момента.По умолчанию
Регулировка скорости.- Тип модуляции
Выберите гистерезисную или пространственную векторную модуляцию. Тип модуляции по умолчанию —
Гистерезис.- Схема
Когда вы нажимаете эту кнопку, появляется диаграмма, показывающая регуляторы скорости и тока схемы появляется.
- Рампы скорости — ускорение
Максимальное изменение скорости, допустимое во время разгона двигателя (об / мин / с).Чрезмерно Большое положительное значение может вызвать пониженное напряжение в шине постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию —
900.- Рампы скорости — замедление
Максимальное изменение скорости, допустимое во время замедления двигателя (об / мин / с). Чрезмерно большое отрицательное значение может вызвать перенапряжение шины постоянного тока. Этот параметр используется в скорости только режим регулирования. По умолчанию
-900.- Частота отсечки скорости
Частота отсечки фильтра нижних частот первого порядка измерения скорости (Гц).Этот параметр используется только в режиме регулирования скорости. По умолчанию
1000.- Время выборки регулятора скорости
Время выборки регулятора скорости (с). Время выборки должно быть кратным шаг по времени моделирования. По умолчанию
100e-6.- ПИ-регулятор — Пропорциональное усиление
Пропорциональное усиление регулятора скорости. Этот параметр используется при регулировании скорости. только режим.По умолчанию
300.- ПИ-регулятор — интегральное усиление
Интегральное усиление регулятора скорости. Этот параметр используется в режиме регулирования скорости. только. По умолчанию
2000.- Пределы выходного крутящего момента — отрицательные
Максимальный отрицательный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Нм). По умолчанию
-1200.- Пределы выходного момента — положительный
Максимальный положительный требуемый крутящий момент, прикладываемый к двигателю регулятором тока (Н.м). По умолчанию
1200.
- Регулятор потока — пропорциональное усиление
Пропорциональное усиление регулятора потока. По умолчанию
100.- Регулятор потока — интегральное усиление
Интегральное усиление регулятора потока. По умолчанию
30.- Пределы выходного потока — отрицательный
Максимальный отрицательный выход регулятора потока (Wb).По умолчанию
-2.- Пределы выходного потока — положительный
Максимальный положительный выход регулятора потока (Wb). По умолчанию
2.- Частота среза фильтра нижних частот
Частота среза фильтра первого порядка оценки потока (Гц). По умолчанию
16.- Время выборки
Время выборки контроллера FOC (с).Время выборки должно быть кратным шаг по времени моделирования. По умолчанию:
20e-6.- Диапазон гистерезиса регулятора тока
Текущая полоса гистерезиса. Это значение представляет собой общую распределенную полосу пропускания. симметрично относительно текущей уставки (A) . По умолчанию
10. На следующем рисунке показан случай, когда текущая уставка равен Is * , а текущая полоса пропускания гистерезиса установлена на dx.Этот параметр не используется при использовании инвертора среднего значения.
- Максимальная частота коммутации
Максимальная частота коммутации инвертора (Гц). Этот параметр не используется при использовании инвертор среднего значения. По умолчанию
20000.- Показать / скрыть автонастройку Control
Выберите, чтобы показать или скрыть параметры инструмента Autotuning Control.
- Желаемое демпфирование [дзета]
Укажите коэффициент демпфирования, используемый для расчета коэффициентов усиления Kp и Ki Блок регулятора скорости (AC). По умолчанию
0,9.- Желаемое время отклика при 5% [Trd (sec)]
Укажите желаемое время установления блока регулятора скорости (AC). Это время, необходимое для того, чтобы реакция контроллера достигла и оставалась в пределах 5%. диапазон целевого значения.По умолчанию
0,1.- Соотношение полосы пропускания (InnerLoop / SpeedLoop)
Укажите соотношение между полосой пропускания и собственной частотой регулятора. По умолчанию
30.- Рассчитать усиление ПИ-регулятора
Вычислить Пропорциональное усиление и Интегральное получить параметров регулятора скорости (AC) и Блоки полевого контроллера.Расчет основан на Желаемое демпфирование [zeta] , Желаемое время отклика @ 5% и Соотношение пропускной способности (InnerLoop / SpeedLoop) параметров. Вычисленные значения отображаются в маске блока Drive. Нажмите Примените или OK , чтобы подтвердить их.
Бездатчиковая вкладка
- Пропорциональное усиление
Укажите значение пропорционального усиления ПИ-регулятора, которое используется для настройки скорость двигателя.
По умолчанию
5000.- Интегральное усиление
Укажите значение интегрального усиления ПИ-регулятора, которое используется для настройки скорость двигателя.
По умолчанию
50.- Верхний — Верхний предел выхода
Укажите верхний предел выхода ПИ-регулятора.
По умолчанию
500.- Нижний — нижний предел выхода
Укажите нижний предел выхода ПИ-регулятора.
По умолчанию
-500.- Время выборки контроллера
Время выборки контроллера, в с. Время выборки должно быть кратно времени моделирования. шаг. По умолчанию —
2e-06.
Блок входов и выходов
-
SP Уставка скорости или крутящего момента. Заданное значение скорости может быть ступенчатой функцией, но скорость скорость изменения будет соответствовать рампе ускорения / замедления.Если момент нагрузки и скорости имеют противоположные знаки, ускоряющий момент будет суммой электромагнитного и моменты нагрузки.
-
TmилиWm Механический вход: момент нагрузки (Tm) или скорость двигателя (Wm). Для механического ротационный порт (S), этот ввод удаляется.
-
A, B, C Трехфазные клеммы моторного привода.
-
Wm,TeилиS Механическая мощность: скорость двигателя (Wm), электромагнитный момент (Te) или механический ротационный порт (S).
Когда для параметра Режим выходной шины установлено значение Несколько выходные шины , блок имеет следующие три выходные шины:
-
Motor Вектор измерения двигателя. Этот вектор позволяет вам наблюдать переменные двигателя. с помощью блока Bus Selector.
-
Conv Вектор измерения трехфазных преобразователей. Этот вектор содержит:
Обратите внимание, что все значения тока и напряжения мостов можно визуализировать с помощью блока Multimeter.
-
Ctrl Вектор измерения контроллера. Этот вектор содержит:
Когда для параметра Режим выходной шины установлено значение Одиночный выходная шина , блок группирует выходы Motor, Conv и Ctrl в одну шину вывод.
Технические характеристики моделиБиблиотека содержит набор параметров привода мощностью 3 и 200 л.с. Характеристики эти два диска показаны в следующей таблице.
Технические характеристики привода 3 л.с. и 200 л.с.
Привод 3 л.с. | Привод 200 л.с. | ||||
|---|---|---|---|---|---|
Амплитуда | 220 В | 460 В | |||
Частота | 60 Гц | 60197 905
Значения ||||
Мощность | 3 л.с. | 200 л.с. | |||
Скорость | об / мин | Напряжение | 220 В | 460 В |
Примеры
Пример ac3_example иллюстрирует моделирование привода двигателя AC3
со стандартными условиями нагружения для детальных и средних моделей.
Ссылки
[1] Bose, B. K. Modern Power Electronics and AC Диски . Река Аппер Сэдл, Нью-Джерси: Прентис-Холл, 2002.
[2] Грелет, Г., и Г. Клерк. Actionneurs électriques . Paris: Éditions Eyrolles, 1997.
[3] Krause, P.C. Анализ электрического Машины . Нью-Йорк: McGraw-Hill, 1986.
Представлен в R2006a
«регулирование скорости асинхронного двигателя במחיר המשתלם ביותר — מבצעים נהדרים לקניית регулирование скорости асинхронного двигателя מחנויות של регулирование скорости асинхронного двигателя ב- AliExpress»
מבצעים חמים ב- регулирование скорости асинхронного двигателя: העסקאות והנחות המקוונות הטובות ביותר עם ביקורות של לקוחות אמיתיים.
ות טובות! תה במקום הנכון עבור управление скоростью асинхронного двигателя. עכשיו אתה כבר יודע את זה, מה שאתה מחפש, אתה בטוח למצוא את זה aliexpress. אנחנו ממש יש אלפי מוצרים מעולים בכל קטגוריות המוצרים. ין אם אתה מחפש high-end תוויות ו זול, כ רכישות בכמות גדולה, אנו מבטיחים כי זה כאן aliexpress. תוכלו למצוא חנויות רשמיות עבור שמות מותגים לצד מוכרים הנחה עצמאית קטנה, כולם מציעים משלוח מהיר ואמיר.
ולם לא יוכה על בחירה, איכות ומחיר. כל יום תוכלו למצוא הצעות חדשות, מקוונות בלבד, הנחות בחנויות והזדמנות לשמור עוד יותר על ידי איסוף קופונים. י ייתכן שיהיה עליך לפעול מהר כמו זה העליון управление скоростью асинхронного двигателя מוגדר להיות אחד המבוקשים ביותר המבוקשים ביותר בתוך זמן קצר. תחשוב כמה י אתה חברים יהיה כאשר אתה אומר להם שיש לך управление скоростью асинхронного двигателя על aliexpress.עם ירים הנמוכים ביותר באינטרנט, מחירי משלוח זול ואפשרויות אוסף מקומי, תה יכול לעשות חיסכון גדול עוד יותר.
תה עדיין נמצא בשני מוחות לגבי регулировка скорости асинхронного двигателя וחושבים על ירת מוצר דומה, ‘אלכס’ הוא מקום מצוין להשוות מחירים ומוכרים. ו נעזור לך להבין אם זה שווה תוספת עבור גירסת high-end או אם אתה מקבל רק עסקה טובה על ידי מקבל ת הפריט זול יותר.Номер и, אם אתה רק רוצה לטפל בעצמך ו להתיז על הגרסה היקרה ביותר, תמיד יהיה תמיד לוודא שאתה יכול לקבל את המחיר הטוב ביותר עבור הכסף שלך, אפילו לתת לך לדעת מתי אתה תהיה טוב יותר מחכה קידום להתחיל, ואת החיסכון שאתה יכול לצפות לעשות.
Aliexpress. כל ות ומוכר מדורגות עבור שירות לקוחות, יר ואיכות על ידי לקוחות אמיתיים.וסף אתה יכול למצוא את החנות או דירוגי המוכר הפרט, כמו גם להשוות מחירים, הנחוח והנחות מציעה על ותו וצר על יי רוי רות וצר על יאי רוי רי ר כל רכישה מדורגת בכוכבים ולעתים קרובות יש הערות שנותרו על ידי לקוחות קודמים המתארים את חוויית העסקה שלהם, כך ת י וי. בקיצור, אתה לא צריך לקחת את המילה שלנו על זה — רק להקשיב למיליוני לקוחות מאושרים שלנו.
וגם, תה חדש aliexpressי aliexpress, ו מאפשרים לך על סוד.רק לפני שתלחץ על ‘קנה עכשיו’ בתהליך העסקה, הקדש רגע כדי לבדוק את הקופונים — ותחסוך עוד יותר. תה יכול למצוא קופונים החנות, ופונים aliexpress או שאתה יכול לאסוף קופונים כל יום על ידי משחק ים על יקציה aliexpress. וכפי שרוב המפיצים שלנו מציעים משלוח חינם — אנחנו חושבים שתסכים לכך שאתה מקבל את זה регулировка скорости асинхронного двигателя באחד המחירים הטובים ביותר באינטרנט.
תמיד יש לנו את הטכנולוגיה העדכנית ביותר, את המגמות החדשות ביותר, ואת התוויות המדוברות ביותר.על aliexpress, איכות מעולה, יר ושירות מגיע כסטנדרט — בכל פעם. התחל את חוויית הקנייה הטובה ביותר שתהיה לך אי פעם, ממש כאן.
Определение: Асинхронный двигатель — Справка разработчика
Переключить навигацию
- Инструменты разработки
- Какие инструменты мне нужны?
- Программные инструменты
- Начни здесь
- MPLAB® X IDE
- Начни здесь
- Установка
- Введение в среду разработки MPLAB X
- Переход на MPLAB X IDE
- Переход с MPLAB IDE v8
- Переход с Atmel Studio
- Конфигурация
- Плагины
- Пользовательский интерфейс
- Проектов
- файлов
- Редактор
- Редактор
- Интерфейс и ярлыки
- Основные задачи
- Внешний вид
- Динамическая обратная связь
- Навигация
- Поиск, замена и рефакторинг
- Инструменты повышения производительности
- Инструменты повышения производительности
- Автоматическое форматирование кода
- Список задач
- Сравнение файлов (разница)
- Создать документацию
- Управление окнами
- Сочетания клавиш
- Отладка
- Контроль версий
- Автоматизация
- Язык управления стимулами (SCL)
- Отладчик командной строки (MDB)
- Создание сценариев IDE с помощью Groovy
- Поиск и устранение неисправностей
- Работа вне MPLAB X IDE
- Другие ресурсы
- Улучшенная версия MPLAB Xpress
- MPLAB Xpress
- MPLAB IPE
- Программирование на C
- Компиляторы MPLAB® XC
- Начни здесь
- Компилятор MPLAB® XC8
- Компилятор MPLAB XC16
- Компилятор MPLAB XC32
- Компилятор MPLAB XC32 ++
- Кодовое покрытие MPLAB
- Сборщики
- Компилятор IAR C / C ++
- Конфигуратор кода MPLAB (MCC)
- MPLAB Harmony версии 2
- MPLAB Harmony версии 3
- среда разработки Atmel® Studio
- Atmel СТАРТ (ASF4)
- Advanced Software Framework v3 (ASF3)
- Начни здесь
- ASF3 Учебники
- ASF Audio Sine Tone Учебное пособие
- Интерфейс LCD с SAM L22 MCU Учебное пособие
- Блоки устройств MPLAB® для Simulink®
- Утилиты
- Инструменты проектирования FPGA
- Аналоговый симулятор MPLAB® Mindi ™
- Аппаратные средства
- Начни здесь
- Сравнение аппаратных средств
- Средства отладки и память устройства
- Исполнительный отладчик
- Демо-платы и стартовые наборы
- Внутрисхемный эмулятор MPLAB® REAL ICE ™
- Эмулятор SAM-ICE JTAG Внутрисхемный эмулятор
- Atmel® ICE
- Power Debugger
- Внутрисхемный отладчик MPLAB® ICD 3
- Внутрисхемный отладчик MPLAB® ICD 4 Внутрисхемный отладчик
- PICkit ™ 3
- Внутрисхемный отладчик MPLAB® PICkit ™ 4
- MPLAB® Snap
- MPLAB PM3 Универсальный программатор устройств
- Принадлежности
- Заголовки эмуляции и пакеты расширения эмуляции
- Пакеты расширения процессора и отладочные заголовки
- Начни здесь Обзор
- PEP и отладочных заголовков
- Требуемый список заголовков отладки
- Таблица обязательных отладочных заголовков
- AC162050, AC162058
- AC162052, AC162055, AC162056, AC162057
- AC162053, AC162054
- AC162059, AC162070, AC162096
- AC162060
- AC162061
- AC162066
- AC162083
- AC244023, AC244024
- AC244028
- AC244045
- AC244051, AC244052, AC244061
- AC244062
- Дополнительный список заголовков отладки
- Список необязательных отладочных заголовков — устройства PIC12 / 16
- Дополнительный список заголовков отладки — устройства PIC18
- Дополнительный список заголовков отладки — устройства PIC24
- Целевые следы заголовка отладки
- Подключения заголовка отладки
- SEGGER J-Link
- Сетевые инструменты K2L
- Рекомендации по проектированию средств разработки
- Ограничения отладки — микроконтроллеры PIC
- Инженерно-технические примечания (ETN) [[li]] Встраиваемые платформы chipKIT ™
- Функции
- Интеграция встроенного программного обеспечения
- Начни здесь
- Программирование на C
- Программирование на языке ассемблера MPASM ™
- MPLAB® Harmony v3
- Начни здесь
- Библиотеки гармонии MPLAB®
- MPLAB® Harmony Configurator (MHC)
- Проекты и учебные пособия MPLAB Harmony
- Периферийные библиотеки на SAM L10
- Начало работы с Периферийными библиотеками Harmony v3
- Периферийные библиотеки с низким энергопотреблением на SAM L10
- Периферийные библиотеки на SAM C2x
- Начало работы с периферийными библиотеками Harmony v3
- Приложение с низким энергопотреблением с периферийными библиотеками Harmony v3
- Периферийные библиотеки на SAM D21
- Периферийные библиотеки на SAM D5x / E5x
- Начало работы с периферийными библиотеками Harmony v3
- Приложение с низким энергопотреблением с периферийными библиотеками Harmony v3
- Периферийные библиотеки на SAM E70
- Периферийные библиотеки на SAM L2x
- Приложение с низким энергопотреблением с Harmony v3 с использованием периферийных библиотек
- Периферийные библиотеки на PIC32 MZ EF
- Периферийные библиотеки на PIC32 MX470
- Периферийные библиотеки на PIC32 MK GP
- Драйверы и системные службы для SAM E70 / S70 / V70 / V71
- Драйверы и FreeRTOS на SAM E70 / S70 / V70 / V71
- Драйверы, промежуточное ПО и FreeRTOS на PIC32 MZ EF
- SD Card Audio Player / Reader Учебник на PIC32 MZ EF
- Управление двигателем на SAM E54
- Приложение Arm® TrustZone® для начинающих на микроконтроллерах SAM L11
- Миграция ASF на SAM C21 в MPLAB Harmony на PIC32CM MC
- Периферийные библиотеки на SAM L10
- MPLAB® Harmony v2
- Начни здесь
- Что такое MPLAB Harmony Framework?
- Конфигуратор гармонии MPLAB (MHC) Обзор
- MPLAB Harmony Framework
- Библиотеки гармонии MPLAB
- Интеграция встроенного программного обеспечения