Частотный преобразователь (электропривод) — Википедия
Частотный преобразователь — электронное устройство для изменения частоты электрического тока (напряжения)[1][2].
Частотный асинхронный преобразователь частоты служит для преобразования сетевого трёхфазного или однофазного переменного тока частотой 50 (60) Гц в трёхфазный или однофазный ток, частотой от 1 Гц до 800 Гц.
Промышленностью выпускаются частотные преобразователи электроиндукционного типа, представляющего собой по конструкции асинхронный двигатель с фазным ротором, работающий в режиме генератора-преобразователя, и преобразователи электронного типа.
Частотные преобразователи электронного типа часто применяют для плавного регулирования скорости асинхронного электродвигателя или синхронного двигателя за счет создания на выходе преобразователя электрического напряжения заданной частоты. В простейших случаях регулирование частоты и напряжения происходит в соответствии с заданной характеристикой V/f, в наиболее совершенных преобразователях реализовано так называемое векторное управление.
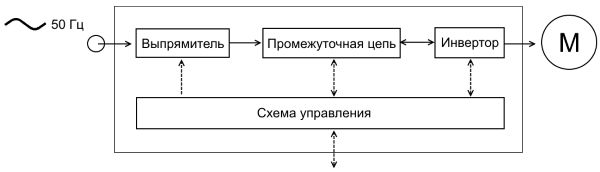
Частотный преобразователь электронного типа — это устройство, состоящее из выпрямителя (моста постоянного тока), преобразующего переменный ток промышленной частоты в постоянный, и инвертора (преобразователя) (иногда с ШИМ), преобразующего постоянный ток в переменный требуемой частоты и амплитуды. Выходные тиристоры (GTO) или транзисторы (IGBT) обеспечивают необходимый ток для питания электродвигателя.
Для улучшения формы выходного напряжения между преобразователем и двигателем иногда ставят дроссель, а для уменьшения электромагнитных помех — EMC-фильтр.
ПЧ — преобразователь частоты;ИТ — преобразователь частоты источник тока;
ИН — преобразователь частоты источник напряжения;
АИМ — преобразователь частоты с амплитудно-импульсной модуляцией;
ШИМ — преобразователь частоты с широтно-импульсной модуляцией Функциональная схема преобразователя частоты, выполненного по схеме источника напряжения Функциональная схема преобразователя частоты, выполненного по схеме источника тока Электронный преобразователь частоты состоит из схем, в состав которых входит тиристор или транзистор, которые работают в режиме электронных ключей. В основе управляющей части находится микропроцессор, который обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
В зависимости от структуры и принципа работы электрического привода выделяют два класса преобразователей частоты:
- С непосредственной связью.
- С явно выраженным промежуточным звеном постоянного тока.
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
В преобразователях с непосредственной связью электрический модуль представляет собой управляемый выпрямитель. Система управления поочередно отпирает группы тиристоров и подключает обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. Частота выходного напряжения у таких преобразователей не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 50 Гц, и как следствие — малый диапазон управления частотой вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование незапираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя с непосредственной связью является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению КПД системы в целом.
Наиболее широкое применение в современных частотно регулируемых модулях находят преобразователи с явно выраженным промежуточным звеном постоянного тока. В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе, фильтруется фильтром, сглаживается, а затем вновь преобразуется инвертором в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению КПД и к некоторому ухудшению массо-габаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используют автономный инвертор, который формирует электрическое напряжение заданной формы на обмотках электродвигателя (как правило, методом широтно-импульсной модуляции). В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия. Они имеют более высокий КПД (до 88 %) по отношению к преобразователям на IGBT-транзисторах[источник не указан 405 дней].
Преобразователи частоты являются нелинейной нагрузкой, создающей токи высших гармоник в питающей сети, что приводит к ухудшению качества электроэнергии.
- ВРД 39-1.10-052-2001 Методические указания по выбору и применению асинхронного частотно-регулируемого электропривода мощностью до 500 кВТ
Частотный преобразователь
27.05.2019Частотный преобразователь напряжения
— это электрический прибор, служащий для преобразования напряжения и частоты переменного тока в напряжение с заданной амплитудой и частотой. Он также способен преобразовывать постоянное напряжение в переменное с заданными характеристиками.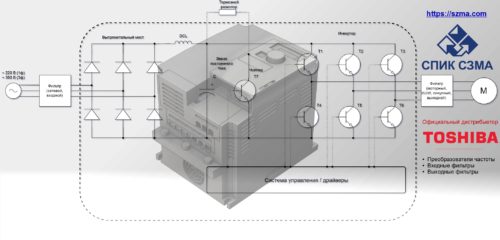 Частотные преобразователь Toshiba
Частотные преобразователь ToshibaДля чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
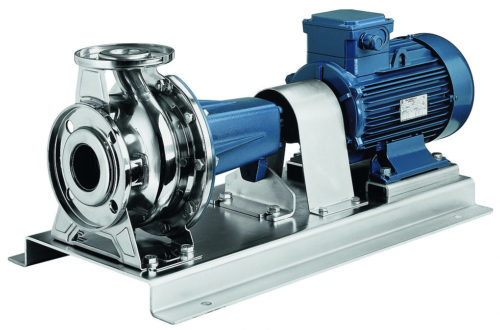 Насос водяной
Насос водяной  Канальный вентилятор
Канальный вентиляторРассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
 Асинхронный электрический двигатель
Асинхронный электрический двигательТрехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая – в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 – s)
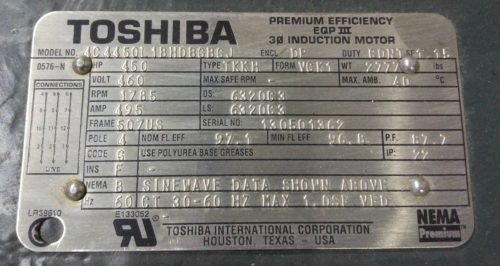
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
Принцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь, иначе говоря ЧРП (частотно-регулируемый привод). Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 – 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 – 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 – 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V – напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
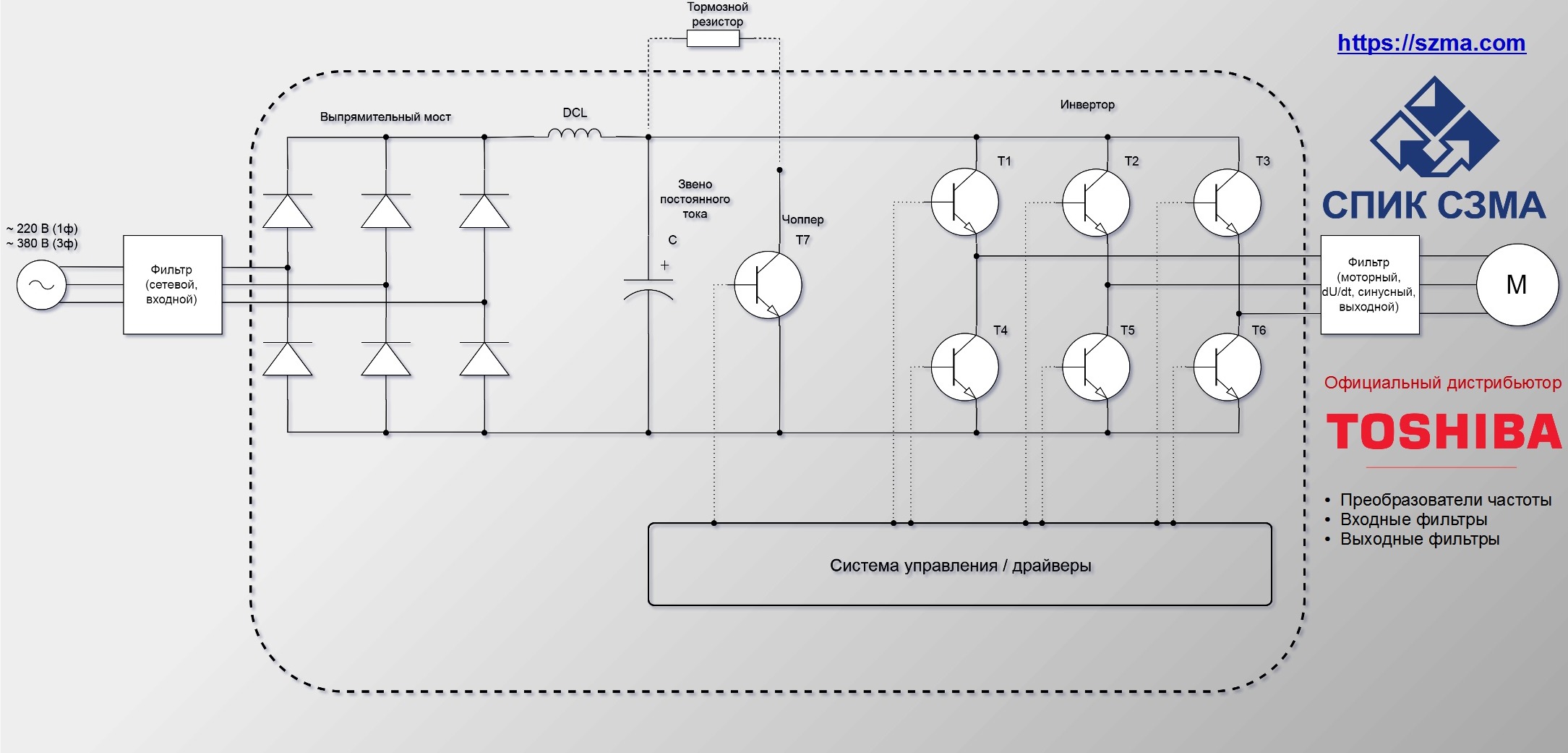 Схема преобразователя частоты
Схема преобразователя частотыНапряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене постоянного тока позволяет дополнительно сгладить пульсации напряжения после диодного моста и выполняет функции снижения гармоник выпрямителя, инжек
схема и инструкция. Регулятор постоянного тока
На сегодняшний день многие приборы производятся с возможностью регулировки тока. Таким образом пользователь имеет возможность контролировать мощность устройства. Работать указанные приборы способны в сети с переменным, а также постоянным током. По своей конструкции регуляторы довольно сильно отличаются. Основной деталью устройства можно назвать тиристоры.
Также неотъемлемыми элементами регуляторов являются резисторы и конденсаторы. Магнитные усилители используются только в высоковольтных приборах. Плавность регулировки в устройстве обеспечивается за счет модулятора. Чаще всего можно встретить именно поворотные их модификации. Дополнительно в системе имеются фильтры, которые помогают сглаживать помехи в цепи. За счет этого ток на выходе получается более стабильным, чем на входе.

Схема простого регулятора
Схема регулятора тока обычного типа тиристоры предполагает использовать диодные. На сегодняшний день они отличаются повышенной стабильностью и прослужить способны много лет. В свою очередь, триодные аналоги могут похвастаться своей экономичностью, однако, потенциал у них небольшой. Для хорошей проводимости тока транзисторы применяются полевого типа. Платы в системе могут использоваться самые разнообразные.
Для того чтобы сделать регулятор тока на 15 В, можно смело выбирать модель с маркировкой КУ202. Подача запирающего напряжения происходит за счет конденсаторов, которые устанавливаются в начале цепи. Модуляторы в регуляторах, как правило, применяются поворотного типа. По своей конструкции они довольно просты и позволяют очень плавно изменять уровень тока. Для того чтобы стабилизировать напряжение в конце цепи, применяются специальные фильтры. Высокочастотные их аналоги могут устанавливаться только в регуляторах свыше 50 В. С электромагнитными помехами они справляются довольно хорошо и большой нагрузки на тиристоры не дают.
Устройства постоянного тока
Схема регулятора постоянного тока характеризуется высокой проводимостью. При этом тепловые потери в устройстве являются минимальными. Чтобы сделать регулятор постоянного тока, тиристор требуется диодного типа. Подача импульса в данном случае будет высокой за счет быстрого процесса преобразования напряжения. Резисторы в цепи должны быть способны выдерживать максимальное сопротивление 8 Ом. В данном случае это позволит привести к минимуму тепловые потери. В конечном счете модулятор не будет быстро перегреваться.
Современные аналоги рассчитаны примерно на предельную температуру в 40 градусов, и это следует учитывать. Полевые транзисторы ток способны пропускать в цепи только в одном направлении. Учитывая это, располагаться в устройстве они обязаны за тиристором. В результате уровень отрицательного сопротивления не будет превышать 8 Ом. Высокочастотные фильтры на регулятор постоянного тока устанавливаются довольно редко.
Модели переменного тока
Регулятор переменного тока отличается тем, что тиристоры в нем применяются только триодного типа. В свою очередь, транзисторы стандартно используются полевого вида. Конденсаторы в цепи применяются только для стабилизации. Встретить высокочастотные фильтры в устройствах данного типа можно, но редко. Проблемы с высокой температурой в моделях решаются за счет импульсного преобразователя. Устанавливается он в системе за модулятором. Низкочастотные фильтры используются в регуляторах с мощностью до 5 В. Управление по катоду в устройстве осуществляется за счет подавления входного напряжения.
Стабилизация тока в сети происходит плавно. Для того чтобы справляться с высокими нагрузками, в некоторых случаях применяются стабилитроны обратного направления. Соединяются они транзисторами при помощи дросселя. В данном случае регулятор тока должен быть способным выдерживать максимум нагрузкуи в 7 А. При этом уровень предельного сопротивления в системе обязан не превышать 9 Ом. В этом случае можно надеяться на быстрый процесс преобразования.

Как сделать регулятор для паяльника?
Сделать регулятор тока своими руками для паяльника можно, используя тиристор триодного типа. Дополнительно потребуются биполярные транзисторы и низкочастотный фильтр. Конденсаторы в устройстве применяются в количестве не более двух единиц. Снижение тока анода в данном случае должно происходить быстро. Чтобы решить проблему с отрицательной полярностью, устанавливаются импульсные преобразователи.
Для синусоидального напряжения они подходят идеально. Непосредственно контролировать ток можно за счет регулятора поворотного типа. Однако кнопочные аналоги также встречаются в наше время. Чтобы обезопасить устройство, корпус используется термостойкий. Резонансные преобразователи в моделях также можно встретить. Отличаются они, по сравнению с обычными аналогами, своей дешевизной. На рынке их часто можно встретить с маркировкой РР200. Проводимость тока в данном случае будет невысокой, однако управляющий электрод со своими обязанностями справляться должен.
Приборы для зарядного устройства
Чтобы сделать регулятор тока для зарядного устройства, тиристоры необходимы только триодного типа. Запирающий механизм в данном случае будет контролировать управляющий электрод в цепи. Полевые транзисторы в устройствах используются довольно часто. Максимальной нагрузкой для них является 9 А. Низкочастотные фильтры для таких регуляторов не подходят однозначно. Связано это с тем, что амплитуда электромагнитных помех довольно высокая. Решить эту проблему можно просто, используя резонансные фильтры. В данном случае проводимости сигнала они препятствовать не будут. Тепловые потери в регуляторах также должны быть незначительными.
Применение симисторных регуляторов
Симисторные регуляторы, как правило, применятся в устройствах, мощность которых не превышает 15 В. В данном случае они предельное напряжение способны выдерживать на уровне 14 А. Если говорить про приборы освещения, то они использоваться могут не все. Для высоковольтных трансформаторов они также не подходят. Однако различная радиотехника с ними способна работать стабильно и без каких-либо проблем.
Регуляторы для активной нагрузки
Схема регулятора тока для активной нагрузки тиристоры предполагает использовать триодного типа. Сигнал они способны пропускать в обоих направлениях. Снижение тока анода в цепи происходит за счет понижения предельной частоты устройства. В среднем данный параметр колеблется в районе 5 Гц. Напряжение максимум на выходе должно составлять 5 В. С этой целью резисторы применяются только полевого типа. Дополнительно используются обычные конденсаторы, которые в среднем способны выдерживать сопротивление 9 Ом.
Импульсные стабилитроны в таких регуляторах не редкость. Связано это с тем, что амплитуда электромагнитных колебаний довольно большая и бороться с ней нужно. В противном случае температура транзисторов быстро возрастает, и они приходят в негодность. Чтобы решить проблему с понижающимся импульсом, преобразователи используются самые разнообразные. В данном случае специалистами также могут применяться коммутаторы. Устанавливаются они в регуляторах за полевыми транзисторами. При этом с конденсаторами они соприкасаться не должны.
Как сделать фазовую модель регулятора?
Сделать фазовый регулятор тока своими руками можно при помощи тиристора с маркировкой КУ202. В этом случае подача запирающего напряжения будет проходить беспрепятственно. Дополнительно следует позаботиться о наличии конденсаторов с предельным сопротивлением свыше 8 Ом. Плата для этого дела может быть взята РР12. Управляющий электрод в этом случае обеспечит хорошую проводимость. Импульсные преобразователи в регуляторах данного типа встречаются довольно редко. Связано это с тем, что средний уровень частоты в системе превышает 4 Гц.
В результате на тиристор оказывается сильное напряжение, которое провоцирует возрастание отрицательного сопротивления. Чтобы решить эту задачу, некоторые предлагают использовать двухтактные преобразователи. Принцип их работы построен на инвертировании напряжения. Изготовить самостоятельно регулятор тока данного типа в домашних условиях довольно сложно. Как правило, все упирается в поиски необходимого преобразователя.

Устройство импульсного регулятора
Чтобы сделать импульсный регулятор тока, тиристор потребуется триодного типа. Подача управляющего напряжения осуществляется им с большой скоростью. Проблемы с обратной проводимостью в устройстве решаются за счет транзисторов биполярного типа. Конденсаторы в системе устанавливаются только в парном порядке. Снижение тока анода в цепи происходит за счет смены положения тиристора.
Запирающий механизм в регуляторах данного типа устанавливается за резисторами. Для стабилизации предельной частоты фильтры могут применяться самые разнообразные. Впоследствии отрицательное сопротивление в регуляторе не должно превышать 9 Ом. В данном случае это позволит выдерживать большую токовую нагрузку.
Модели с плавным пуском
Для того чтобы сконструировать тиристорный регулятор тока с плавным пуском, нужно позаботиться о модуляторе. Наиболее популярными на сегодняшний день принято считать поворотные аналоги. Однако они между собой довольно сильно отличаются. В данном случае многое зависит от платы, которая применяется в устройстве.
Если говорить про модификации серии КУ, то они работают на самых простых регуляторах. Особой надежностью они не выделяются и определенные сбои все же дают. Иначе обстоят дела с регуляторами для трансформаторов. Там, как правило, применяются цифровые модификации. В результате уровень искажений сигнала значительно сокращается.
принцип работы, способы регулирования частоты вращения асинхронного двигателя, видео
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.

Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
Принцип регулирования
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.
ω=2πf/p, где
- ω – угловая скорость вращения статора;
- f – частота входного напряжения;
- p – количество полюсных пар.

То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Структура частотного регулятора
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Принцип работы
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.
 Принцип работы
Принцип работыИтак, пройдемся по рисунку, где
- «В» – это неуправляемый силовой выпрямитель диодного типа.
- «АИН» – автономный инвертор.
- «СУИ ШИМ» – система широтно-импульсного управления.
- «САР» – система автоматического регулирования.
- «Св» – конденсатор фильтра.
- «Lв» – дроссель.
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.

Заключение по теме
Как видите, данный способ регулирования частоты вращения асинхронного двигателя достаточно прост. Но и не только. Он позволяет уйти от ненадежных двигателей постоянного тока, перейти на более надежные виды электрического оборудования. К тому же структура прибора, основанная на современных методах преобразования электрического тока, сделала его дешевым и доступным. Плюс ко всему простота устройства дает возможность собрать частотники своими руками.
Частотные преобразователи | Регуляторы частоты
Частотный преобразователь используется для плавного регулирования момента и скорости вращения вала электродвигателя. Также частотник снижает пусковые токи, уменьшает потребление электроэнергии (до 60%), обеспечивает плавный пуск и торможение привода, его защиту от перегрузок и перегрева.
Принцип работы
Общий принцип работы частотного преобразователя основан на формировании выходного напряжения с заданными характеристиками. Преобразователь частоты с промежуточным звеном устроен следующим образом. На первом этапе преобразования происходит выпрямление переменного напряжения электросети, уменьшение его пульсации и фильтрация гармоник (гармонических искажений тока). Из выпрямителя постоянный ток поступает в цепи инвертора, где преобразуется в переменное напряжение с изменяемой частотой и амплитудой. В качестве силовых элементов используются IGBT-транзисторы, выполняющие функцию электронных ключей. Управление частотой позволяет регулировать скорость вращения ротора электродвигателя.
По способу управления различают скалярные и векторные преобразователи частоты. Скалярные частотники используют широтно-импульсную модуляцию (ШИМ) — распространенный метод управления, суть которого заключается в формировании и подаче выходных импульсов тока заданной частоты и скважности на статорную обмотку электродвигателя. Особенностью скалярного способа является возможность одновременного управления несколькими электродвигателями.

Векторный преобразователь частоты управляет магнитными полями как статора, так и ротора за счет изменения значений напряжения и выходного тока (силы, частоты и фазы). Выпускаются два класса подобных устройств: с обратной связью (с датчиком на валу двигателя) и бездатчиковые. Частотный преобразователь с обратной связью быстро реагирует на изменение нагрузки, сохраняя заданную скорость вращения двигателя. Это наиболее современный тип оборудования. В целом преобразователи частоты с векторным управлением имеют более высокую точность, но, как правило, сложнее в настройке.
Применение
Инверторы частоты используются для управления электроприводами различного оборудования:
- насосы систем водоснабжения (скважинные, глубинные)
- станочное оборудование (токарные, шлифовальные, ленточнопильные станки)
- лифтовое оборудование
- вентиляторы
- компрессоры
- конвейеры, транспортеры, рольганги
- подъемное оборудование (краны, электротельферы)
Как выбрать частотный преобразователь
Существует несколько основных параметров, которыми руководствуются при выборе частотника.
1. Мощность преобразователя частоты должна соответствовать номинальной мощности электродвигателя. Этот принцип верен в случае с обычным асинхронным приводом. Если используется специальный двигатель (синхронный, с тормозом и т. д.), то правильнее ориентироваться на значение номинального тока — у частотника оно должно быть выше, чем у двигателя.
2. Параметры электросети. Большинство современных частотных инверторов рассчитаны на работу в трехфазной сети с напряжением 380В. Также выпускаются однофазные инверторы малой мощности, рассчитанные на напряжение 220-240В. К сожалению, качество электросети не всегда стабильно. Падение напряжения может привести к отключению частотника, резкое повышение выведет его из строя. Чтобы избежать подобных проблем, рекомендуется выбирать ПЧ с широким диапазоном напряжений.
Обратите внимание. Однофазный частотник можно подключить к трехфазному двигателю по схеме «треугольник» (при подключении по схеме «звезда» происходит потеря мощности). Трехфазный частотный преобразователь также может работать в однофазной сети, но в этом случае его выходной ток не должен быть выше 50% от номинального значения.
3. Перегрузочная способность. Важный параметр, от которого зависит срок службы инвертора. Подбирайте ПЧ в соответствии с продолжительностью, периодичностью и величиной перегрузок двигателя. Обычно эти данные указываются в руководстве к приводу. Иногда рекомендуют приобретать преобразователь с запасом по мощности и пиковому току до 15%.
4. Диапазон регулирования частот. Практически любой преобразователь частоты обеспечит стабильную работу двигателя, если скорость его вращения не опускается ниже 10% от номинальной. При работе привода на низких оборотах необходимо позаботиться о дополнительном охлаждении, чтобы избежать перегрева. Верхний предел диапазона указывает на то, сможет ли инвертор управлять электродвигателем с высокими номинальными частотами. Наиболее широкий диапазон предлагают векторные частотные преобразователи.
5. Дополнительные опции. Нередко производители стремятся удешевить свою продукцию и предлагают частотники в базовой комплектации. При покупке преобразователя следует заранее позаботиться о защитном оборудовании: сетевом и моторном дросселях, тормозном резисторе и проч.
К прочим характеристикам инверторов, определяющих выбор той или иной модели, относятся: количество цифровых и аналоговых входов/выходов, класс защиты IP, информативность и удобство отображения рабочих параметров (количество строк на дисплее, тип экрана и проч.), уровень защиты двигателя (защита от скачков напряжения в сети, от перегрева, от короткого замыкания и т. д.), климатическое исполнение.
Также рекомендуем ознакомиться с каталогом мотор-редукторов. В ассортименте представлены приводы с червячной, зубчатой, планетарной и волновой передачами.
Дополнительная информация:
Выбор частотного преобразователя
Подключение и настройка преобразователя
Автоматическое регулирование частоты и активной мощности
Основные требования.
Постоянство частоты тока — основное условие нормальной работы потребителей электроэнергии.
Снижение частоты тока приводит к уменьшению частоты вращения электродвигателей электромеханизмов и к значительному понижению их производительности. Понижение частоты приводит к уменьшению к. п. д. первичных двигателей.
Повышение частоты тока сверх номинальной приводит к возрастанию мощности электродвигателей и к увеличению потребления электроэнергии судовыми механизмами; возрастает также температура нагрева, перегрев электро-двигателей.
Регулирование частоты тесно связано с распределением активной мощности между агрегатами судовой электростанции, так как восстановление частоты в электроэнергетической системе достигается путем изменения активной мощности этих агрегатов.
Устройства автоматического регулирования должны поддерживать постоянство частоты в электроэнергетической системе при экономически наивыгоднейшем распределении нагрузки между агрегатами и обеспечивать высокую надежность работы системы как в нормальных, так и в аварийных режимах.
Структурная схема регулирования.
Причиной изменения частоты вращения является нарушение баланса между суммарной мощностью, вырабатываемой генераторами, и суммарной мощностью, потребляемой приемниками.
Регулирование частоты тока осуществляется регуляторами частоты вращения первичных двигателей и регуляторами частоты тока. Первые непосредственно реагируют на изменение частоты вращения первичного двигателя, а вторые — на изменение тока генератора и его частоты.
Структурная схема системы автоматического регулирования частоты тока и распределения активной мощности (рис. 21.6) включает следующие элементы: измерительный элемент регулятора частоты вращения ИЭРЧВ, реагирующий на отклонение частоты вращения от заданного значения; исполнительный орган регулятора частоты вращения ИОРЧВ; измерительный орган частоты тока (датчик частоты) ДЧ; измерительный орган активного тока (датчик активного тока) ДАТ; усилитель У; серводвигатель СД- исполнительный орган устройства регулирования частоты тока и распределения активной мощности;. первичный двигатель ПД; генератор Г.
При нарушении установившегося режима в системе приходят в действие регуляторы частоты вращения и частоты тока.
В процессе регулирования устанавливается новое значение частоты тока, определяемое статизмом характеристик регулирования.
Регулирование частоты тока и активной мощности генераторов осуществляется воздействием на исполнительный орган регулятора частоты вращения первичного двигателя.
Для регулирования частоты вращения и частоты тока применяются регуляторы с астатической 1 и статической 2 характеристиками (рис. 21.7), выражающими зависимость угловой скорости ω и частоты f от значения активной мощности Р.
При регулировании по астатической характеристике частота в системе остается постоянной независимо от величины нагрузки. Регулирование по статической характеристике дает возможность получить заданное распределение активной нагрузки между генераторами, но при этом с увеличением нагрузки частота уменьшается.
Коэффициент статизма характеристики регулирования определяется по формулам:
где ωx.x, fx.x— угловая скорость и частота при холостом ходе;
ωном , fном — угловая скорость и частота при номинальной активной нагрузке генератора.
Регуляторы частоты вращения характеризуются также степенью неравномерности
где nх.х — частота вращения при холостом ходе;
nном— частота вращения при номинальной нагрузке;
nср — частота вращения при половинной нагрузке.
Основной способ регулирования частоты вращения — по мгновенному отклонению регулируемого параметра. На этом принципе основаны центробежные регуляторы частоты вращения, широко используемые в судовых электроэнергетических системах.
Устройство регулирования частоты и автоматического распределения активных нагрузок типа УРЧН.
На каждой из генераторных секций ГЭРЩ (рис. 21.8) установлены: датчик активного тока ДАТ и усилитель У; кроме того, на секции генератора Г1 установлен прибор регулирования частоты ПРЧ.
Каждый из датчиков активного тока ДАТ измеряет активную составляющую нагрузки своего генератора. Датчики активного тока через блокирующие контакты генераторных выключателей соединены по дифференциальной схеме. Разностный ток их выходов протекает по обмоткам управления всех магнитных усилителей устройства. Выбор балластного агрегата (т. е. агрегата, регулировочная характеристика которого в процессе распределения остается фиксированной) осуществляется путем выключения питания усилителя выбранного агрегата. Выход каждого усилителя включен на обмотку управления двигателя регулятора частям вращения агрегата.
Устройство типа УРЧН, включенное в систему, работает следующим образом. При равенстве значений активных нагрузок генераторов выходные токи датчиков активного тока равны, ток в цепи дифференциальной связи между датчиками отсутствует, напряжения на выходах усилителей равны нулю и двигатели регуляторов частоты вращения не работают.
При рассогласовании значений активных нагрузок агрегатов в цепи дифференциальной связи протекает ток, определяемый значением разности выходных токов датчиков ДАТ; на выходах усилителей появляется напряжение, полярность которого определяется направлением тока в обмотке управления усилителя У. Включенные к выходам усилителей серводвигатели СД в зависимости от полярности сигналов воздействуют на настройки регуляторов частоты вращения РЧВ, которые соответственно перемещают регулировочные характеристики регуляторов частоты вращения агрегатов в сторону уменьшения величины рассогласования активных нагрузок, чем достигается пропорциональное распределение активной мощности между генераторами.
Схемы уравнительных связей при параллельной работе синхронных генераторов.
Уравнительные связи применяются для равномерного распределения реактивных нагрузок между параллельно работающими синхронными генераторами, имеющими автоматическую систему регулирования напряжения.
Уравнительные связи осуществляют на постоянном и на переменном токе.
Принцип осуществления уравнительных связей на постоянном токе является единым для всех систем регулирования. В этом случае силовые выпрямители параллельно работающих генераторов по существу в свою очередь работают параллельно на общие шины, от которых при одинаковом напряжении питаются обмотки возбуждения генераторов. Если генераторы разной мощности, то в обмотку возбуждения генератора меньшей мощности включается соответствующий уравнительный резистор.
Схемы уравнительных связей на переменном токе для различных систем регулирования имеют специфические особенности.
Литература
Судовой механик: Справочник. Том 3 — Фока А.А. (2016)
Похожие статьи
Правда о пяти мифах частотно регулируемого привода.
Знание принципов работы частотно регулируемого привода (ЧРП) может упростить процесс выбора преобразователя частоты.
Автор: Пол Эйвери, Yaskawa America Inc.
Независимо от того, насколько давно и каким образом, уже обыденные частотные преобразователи пришли в Вашу жизнь, где-то есть тот, кто впервые стукнулся с ЧРП или только рассматривает возможность их применения. Вспомните, когда вы впервые задумались о применении одного из современных частотных преобразователей с широтно-импульсной модуляцией для двигателя переменного тока. Скорее всего, у вас, на тот момент, было не совсем верное представление об их возможностях и назначении. В этой статье мы рассмотрим и постараемся развеять пять распространенных мифов о частотно регулируемом приводе.

Рис. 1. Частотный преобразователь
Миф № 1: Выходной сигнал частотного преобразователя является синусоидальным
Людям, так или иначе связанные с эксплуатацией электродвигателей в, как правило, знакома работа асинхронных двигателей переменного тока с использованием пускателей. При пуске электродвигателя, пускатель замыкает контакты обмоток электродвигателя с фазами 3-х фазной питающей сети. Напряжение каждой фаза представляет собой синусоидальную волну. Приложенное напряжение создает на клеммах электродвигателя тоже синусоидальной формы с той же частотой (можно убедится проверкой напряжения на клеммах электродвигателя). Пока вроде всё просто и понятно.
А вот что происходит на выходе преобразователя частоты, это совсем другая история. Частотный преобразователь обычно выпрямляет входное трехфазное переменное в постоянное напряжение, которое фильтруется и аккумулируется при помощи больших конденсаторов звена постоянного тока. Напряжение звена постоянного тока затем инвертируется, для получения переменного напряжения, переменной частоты на выходе. Процесс инверсии осуществляется посредством трех изолированных биполярных транзисторов (IGBT) с двумя изолированными затворами — по одной паре на выходную фазу (см. Рис 2). Поскольку выпрямленное напряжение инвертируется в переменное, выходное звено называют «инвертором». Включение, выключение, а также длительность нахождения IGBT-транзисторов в положении ВКЛ или ВЫКЛ может управляться, что и определяет значение частоты выходного напряжения. Отношение выходного среднеквадратического напряжения к выходной частоте определяет магнитный поток, развиваемый в электродвигателе переменного тока. Когда выходная частота увеличивается, выходное напряжение также должно увеличиваться с той же скоростью, чтобы поддерживать постоянство отношения и, следовательно, постоянную скорость вращения двигателя. Обычно соотношение между напряжением и частотой поддерживается по линейному закону, что обеспечивает возможность поддержания постоянного крутящего момента.

Рис. 2. Схема инвертора с IGBT транзисторами.
Результирующий сигнал напряжения, прикладываемый к обмотке двигателя, не является синусоидальным (см. Рис. 3). Обратите внимание, что иногда отношение напряжения по частоте (V / f) может быть отличным от линейного, что характерно для вентиляторов, насосов или центробежных нагрузок, которые не требуют постоянного крутящего момента, но обеспечивают тем самым возможность экономии электроэнергии.

Рис. 3. Форма сигнала ШИМ напряжения на выходе частотного преобразователя
Как же отразится пилообразная форма питающего напряжения на работе электродвигателя. Асинхронный двигатель является по своей сути большой катушкой индуктивности. А характерной особенностью индукции является ее устойчивость к изменениям тока. Увеличивается или уменьшается сита ток, индукция будет выступать против этого изменения. Какое же это имеет отношение к форме сигнала напряжения ШИМ на рисунке 3? Вместо того, чтобы позволить импульсу тока увеличиваться в том же порядке, что и приложенный импульс напряжения, ток начнет медленно возрастать. Когда импульс напряжения закончился, ток плавно уменьшается, а не исчезает мгновенно. В общих чертах это происходит следующим образом: до момента, когда ток снизился до нуля, поступает следующий импульс напряжения, и ток начинает плавно увеличиваться. Если последующий импульс становятся шире, ток плавно достигает большего значения, чем раньше. В конце концов, текущий сигнал становится синусоидальным, хотя и с некоторыми зубчатыми переходами (см. Рис. 4).

Рис. 4. Форма сигнала тока на выходе частотного преобразователя
Однако не думайте, что вы можете подключить свой соленоид к фазам выходного напряжения ЧРП. Это всё же не совсем переменное напряжение.
Миф № 2: все частотные преобразователи одинаковы
В общем виде частотно-регулируемый привод сегодня является довольно зрелым продуктом. Большинство коммерчески доступных приводов содержат одни и те же базовые компоненты: мостовой выпрямитель, блок питания, конденсаторный блок постоянного тока и плата выходного инвертора. Разумеется, существуют различия в алгоритмах управления переключением транзисторов IGBT инвертора, надежности компонентов и эффективности схемы теплового рассеивания. Но основные компоненты остаются прежними.
Есть также исключения. Например, в некоторых ЧРП инвертер имеет три вывода. Такая схема позволяет выходным импульсам варьироваться от половинного до полного импульса сигнала напряжения (см. Рис. 5).

Рис. 5. Трехуровневый выходной сигнал напряжения
Для достижения трехуровневого выходного сигнала звено инвертора должно иметь в два раза больше выходных переключателей, а также запирающих диодов (см. Рис. 6). Преимущества трехуровневой схемы заключается в уменьшении перенапряжения на двигателе из-за гармонических волн, снижении синфазных помех, а также снижении паразитных токов на валах и подшипниках.

Рис. 6. Схема трехуровневого инвертора
Матричный инвертор является еще более нетипичным типом ЧРП. Частотные преобразователи с матричными инверторами не имеют шины постоянного тока или мостового выпрямителя. Вместо этого они используют двунаправленные переключатели, которые могут подключать любое из входящих фазных напряжений к любой из трех выходных фаз (см. Рис. 7). Преимущество этой схемы заключается в том, что мощность может свободно протекать от сети к двигателю или от двигателя к сети для рекуперативного привода постоянного тока. Недостатком является то, что на входе необходима установка фильтра, для обеспечения дополнительной индуктивности и фильтрации формы ШИМ, чтобы исключить негативное влияние на питающую сеть.

Рис. 7. Схема матричного ЧРП
Кроме частотных преобразователей с трехуровневыми выходами и инверторами матричного типа существуют также и другие типы частотно-регулируемых приводов. Таким образом миф о том, что все частотные преобразователи одинаковые развеян.
Миф № 3: Частотный преобразователь компенсирует коэффициентом мощности.
Нередко можно увидеть, что производители частотных преобразователей заявляют значение коэффициента мощности, например, равным 0,98 или почти 1. Действительно коэффициент мощности несколько улучшается после установки ЧРП перед асинхронным двигателем. ЧРП компенсирует реактивную мощность за счет конденсаторного звена. Однако полностью компенсировать фазовый сдвиг преобразователь частоты не может.
Полный коэффициент мощности должен включать реактивную мощность, вызываемую гармониками, создаваемыми в звене постоянного тока. Причиной является работа диодного моста. Важно помнить, что диод работает только тогда, когда напряжение на стороне анода выше, чем напряжение на стороне катода (прямое смещение). Это означает, что диоды открыты только на пике каждой временной фазы как положительной, так и отрицательной частей синусоидальной волны. Это приводит к волнообразной форме волны. Это также приводит к искажению входного тока и прерыванию (см. Рис. 8).

Рис. 7. Форма сигналов после выпрямителя
Чтобы вычислить истинный полный коэффициент мощности (PF), необходимо учесть эффекты гармоник. Следующее уравнение показывает, как гармоники влияют на полный коэффициент мощности:

где THD = суммарное гармоническое искажение
Для прерывистого сигнала входного тока в уравнении THD будет находиться в районе 100% или более. Подставляя это в уравнение, получаем истинный коэффициент мощности PF ближе к 0,71, по сравнению с заявленным 0,98, который не учитывает гармоники.
Но не всё так плохо. В настоящее время существует множество способов гармонические искажения, создаваемые в звене постоянного тока. Они используют как пассивные, так и активные методы подавления искажений входного сигнала. Так, например, вышеупомянутый матричный преобразователь частоты является примером активного метода подавления гармонических искажений.
Миф № 4: С частотным преобразователем Вы можете эксплуатировать двигатель на любой скорости.
Особенность применения частотных преобразователей заключается, что они могут изменять как напряжение, так и частоту выходного сигнала. Благодаря возможности обеспечения требуемой скорости вращения электродвигателя ЧРП нашли широкое применение во всех сферах экономики и всех отраслях промышленности ЧРП может легко выдавать сигнал любой частоту в пределах предусмотренного изготовителем диапазона регулирования. Однако необходимо учитывать, что частотный преобразователь работает в составе электродвигателя в реальных условиях. Технологические требования, такие как необходимый крутящий момент, охлаждение, требуемая мощность так или иначе ограничивают фактический диапазон регулирования преобразователя частоты.
Ограничение № 1. С точки зрения охлаждения электродвигателя, низкая скорость вращения — это не очень хорошая идея. В частности, полностью закрытые вентиляторные (TEFC) двигатели имеют охлаждаются только за счет внутреннего вентилятора, который вращается вместе с валом двигателя. Чем медленнее скорость вращения двигатель, тем меньше поток воздуха и тем хуже охлаждение. Закрытые двигатели обычно не рекомендуются эксплуатировать с частотой ниже 15 Гц (диапазон скоростей 4:1).
Ограничение № 2: Электродвигатели имеют определенные ограничения диапазона скоростей, связанные с механическими и динамическими ограничениями нагрузок вращающихся частей. Обычно эта скорость называется максимальной безопасной частотой вращения. Данная характеристика не всегда указывается на шильдике мотора.
Ограничение № 3: При достижении максимальной частоты вращения крутящий момент двигателя может снижаться. Это ограничение скорости связано с ограничением мощности, которое включает в себя скорость вращения и крутящий момент. Если быть еще точнее, что будет снижаться напряжения ЧРП. Обратите внимание, что вращение двигателя также генерирует собственное напряжение, называемое обратной электродвижущей силой (ЭДС), которое увеличивается со скоростью. Обратная ЭДС создается двигателем, чтобы противостоять приложенному напряжению от ПЧ. На более высоких скоростях ПЧ должен подавать еще большее напряжения, чтобы преодолеть обратную ЭДС, и ток мог протекать по обмоткам двигателя, создавая крутящий момент. После определенного максимального значения преобразователь частоты не может преодолеть обратную ЭДС электродвигателя, и, следовательно, крутящий момент двигателя уменьшается, что, в свою очередь, снижает скорость. Снижение скорости опять приводит к более низкой обратной ЭДС, которая, в свою очередь, позволяет протекать току в двигатель снова. Существует точка равновесия, в которой двигатель достигает максимальной скорости при максимальном крутящем моменте.
Как упоминалось выше ЧРП может создавать крутящий момент на двигателе, сохраняя постоянство отношения V/f (см. Рис. 9).

Рис. 9. График зависимости напряжения от частоты.
Когда частота выходного сигнала увеличивается, напряжение увеличивается линейно. Проблема возникает, когда частота превышает номинальную частоту двигателя. Помимо номинальной частоты, не может увеличиваться выходное напряжение, что соответственно приводит к уменьшению отношения V / f. Отношение V / f является мерой напряженности магнитного поля в двигателе и влияет на его крутящий момент. Следовательно, способность мотора создавать номинальный крутящий момент при частоте выше номинальной должна уменьшаться со скоростью 1 / частота, при этом произведение крутящего момента и частоты, равное мощности, является постоянным. Область работы над номинальной частотой называется постоянным диапазоном мощности, а работа на скоростях ниже номинальной — диапазоном постоянного крутящего момента (см. Рис. 10).

Рис. 10. Графики зависимости мощности и крутящего момента электродвигателя от частоты.
Миф № 5: Входной ток преобразователя частоты выше выходного тока
Возможно, это не миф, а недоразумение. Некоторые пользователи ПЧ измеряют значение выходного и входного тока с помощью измерительного инструмента или с помощью мониторов ПЧ и обнаруживают, что входной ток намного ниже выходного. Это похоже не согласуется с идеей о том, что частотный преобразователь должен иметь некоторые потери и поэтому вход всегда должен быть немного выше, чем выход. Концепция правильная, но она учитывает мощность, а не ток, который следует учитывать:

Входное напряжение всегда находится под напряжением переменного тока. Выходное напряжение изменяется со скоростью по образцу V / f. На самом деле компоненты уравнения немного сложнее. Но ключом к пониманию данного процесса является знание того, что асинхронный двигатель имеет два токовых компонента: один отвечает за создание магнитного поля в двигателе, которое необходимо для вращения двигателя; а второй — ток, создающий крутящий момент, который, как следует из названия, отвечает за создание крутящего момента.
Привод потребляет входной ток, пропорциональный активному крутящему моменту двигателя. Ток, необходимый для создания магнитного поля, обычно не изменяется со скоростью и обеспечивается основными конденсаторами звена постоянного тока, которые заряжаются при включении питания ПЧ. При малых значения крутящего момента выходной ток может быть намного выше, чем входной, поскольку входной ток отражает только составляющую, создающую крутящий момент плюс некоторые гармоники, но не включает ток намагничивания. Ток намагничивания циркулирует между конденсаторами шины постоянного тока и двигателем. Даже при полной нагрузке входной ток обычно будет ниже, чем ток двигателя, поскольку на входе по-прежнему нет составляющей тока намагничивания.
Помните, что в уравнении мы сравниваем входную и выходную мощности. Например, рассмотрим полностью нагруженный двигатель, вращающийся на низких оборотах. Входное напряжение номинальное, а выходное напряжение будет низким из-за низкой скорости вращения. Выходной ток в данном случае будет высокий из-за полной нагрузки на двигатель. А чтобы сбалансировать уравнение мощности, входной ток должен быть ниже выходного тока.
Узнать подробную информацию о частотных преобразователях, ознакомиться с производственной линейкой YASKAWA Вы можете у нашего партнера — ООО «КоСПа»
Или в соответствующем разделе преобразователя YASKAWA
Оригинал статьи: https://www.yaskawa.com/about-us/media-center/industry-articles-display?articleId=2167778
27.07.2017