Регулятор оборотов электродвигателя постоянного тока 12В: схема своими руками
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).![]()
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.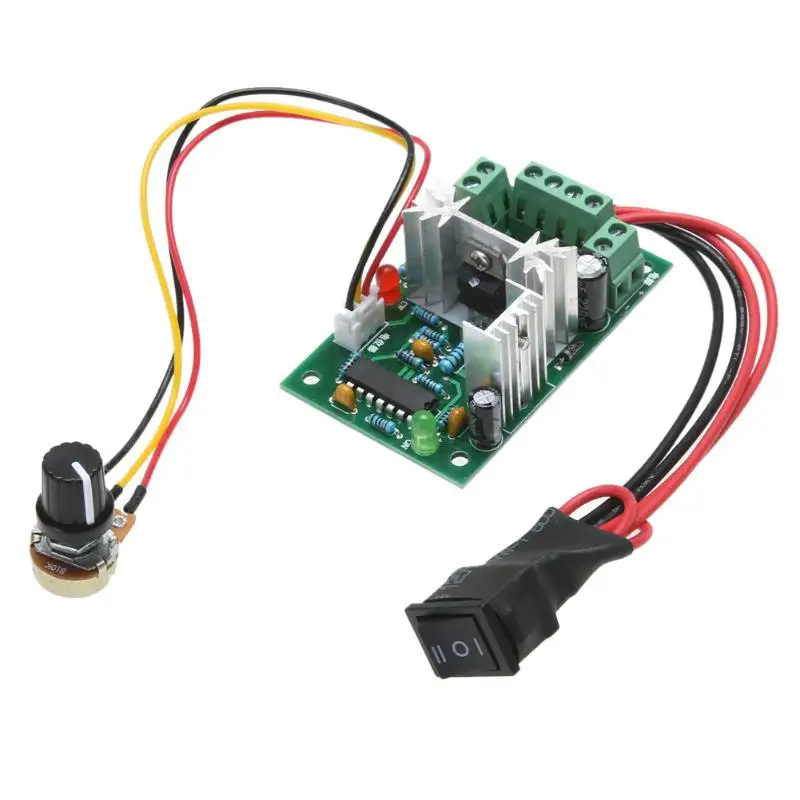
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Источник: servodroid.ru Дополнительная статья ЧИТАТЬ
Страница не найдена | Каталог самоделок
Обсуждения
Содержание1 Распиновка гарнитуры Apple EarPods2 Распиновка гарнитуры Canyon CNE-CEPM013 Распиновка гарнитуры Beats4 Распиновка гарнитуры
High-Tech
Содержание1 Понадобится некоторое программное обеспечение:2 Этап 2: приспособления необходимые для постройки основания3 Этап 3:
Электрика для начинающих
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе.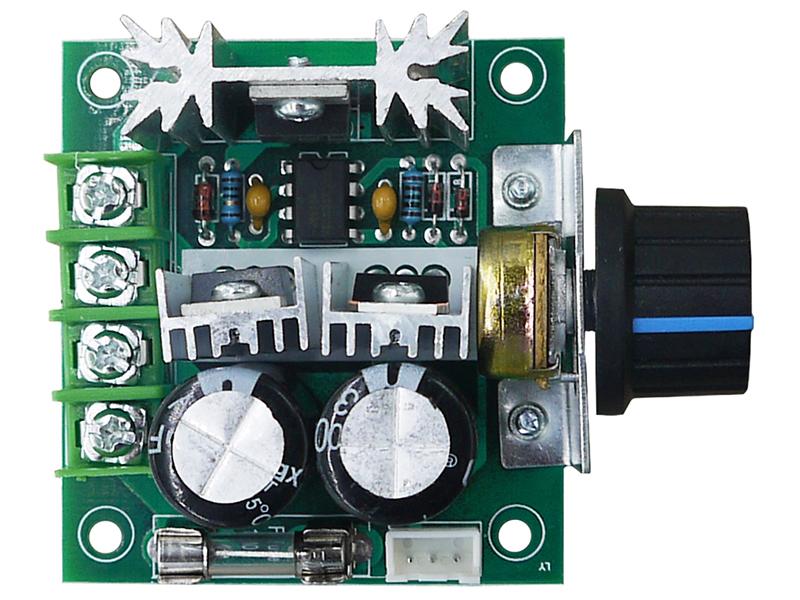 Если рассматривать
Если рассматривать
Поделки для авто
Существует очень простой способ защиты автомобильного АКБ от переполюсовки. Если аккумулятор неправильно подключить к
Обсуждения
Помогите мне пожалуйста советом как собрать аккумулятор из 18650. буду брать б/у из батарей
Arduino
Содержание1 Принцип работы охранного устройства на Arduino.
Страница не найдена | Каталог самоделок
Обсуждения
Содержание1 Распиновка гарнитуры Apple EarPods2 Распиновка гарнитуры Canyon CNE-CEPM013 Распиновка гарнитуры Beats4 Распиновка гарнитуры
High-Tech
Содержание1 Понадобится некоторое программное обеспечение:2 Этап 2: приспособления необходимые для постройки основания3 Этап 3:
Начинающим радиолюбителям наверняка интересен вопрос изоляции транзистора (одного или группы) на радиаторе.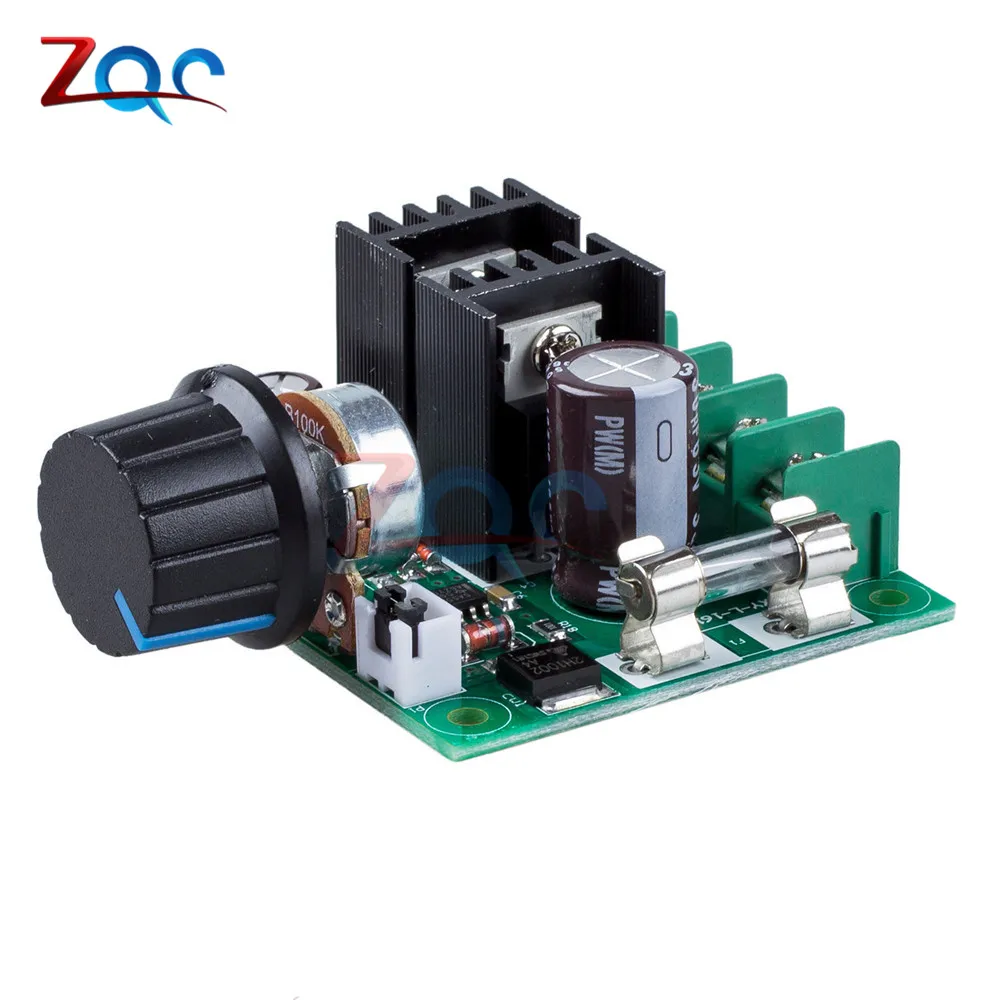 Если рассматривать
Если рассматривать
Поделки для авто
Существует очень простой способ защиты автомобильного АКБ от переполюсовки. Если аккумулятор неправильно подключить к
Обсуждения
Помогите мне пожалуйста советом как собрать аккумулятор из 18650. буду брать б/у из батарей
Arduino
Содержание1 Принцип работы охранного устройства на Arduino. 2 Используемые компоненты.3 Сборка и программирование.4 Примечание. В
2 Используемые компоненты.3 Сборка и программирование.4 Примечание. В
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт.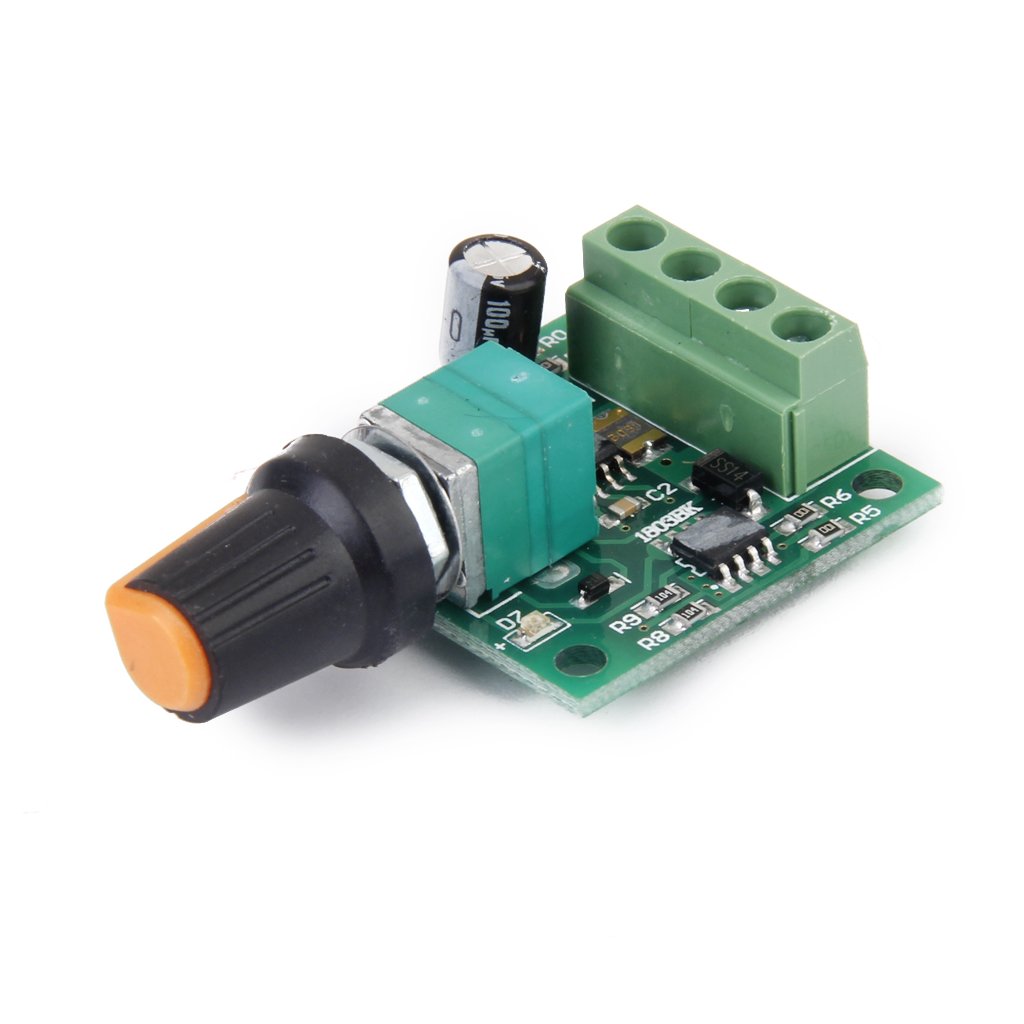 В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности.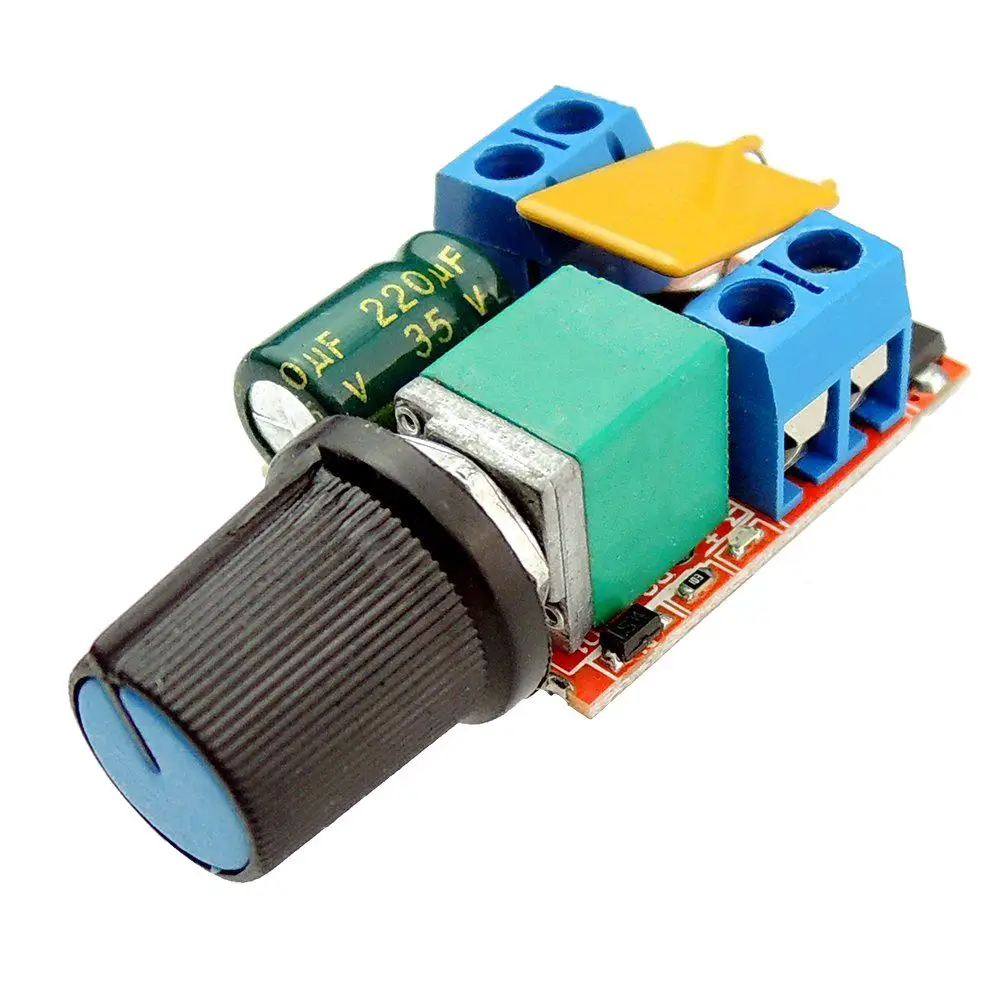 На рисунке приведена печатная плата регулятора:
На рисунке приведена печатная плата регулятора:
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры.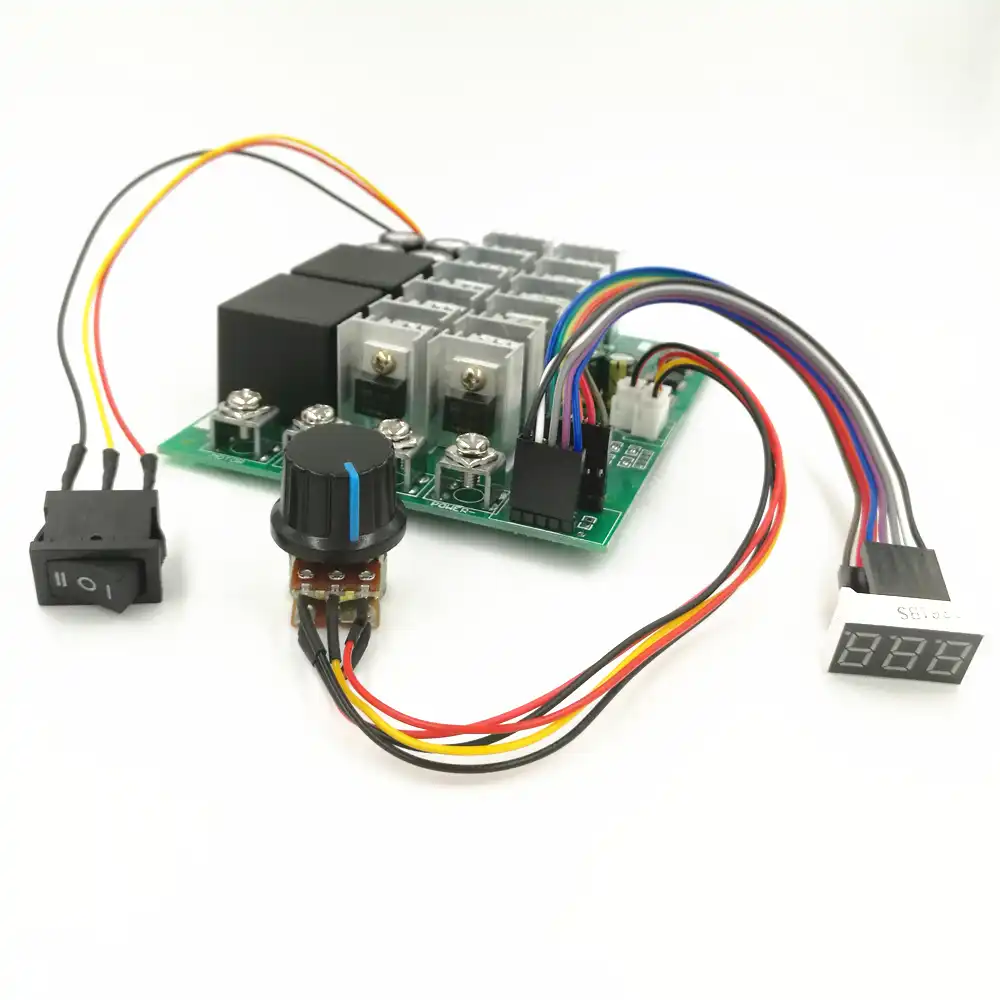
При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:
Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал
Форум
Форум по обсуждению материала РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Регулировка оборотов 12 вольтового двигателя
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555. Из-за применения таймера NE555 схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.
Длительность положительного импульса можно регулировать переменным резистором R2. Чем больше ширина положительного импульса поступающего на затвор MOSFET транзистора, тем больше мощность поступает на двигатель постоянного тока. И наоборот чем уже ширина его, тем меньше мощности передается и как следствие понижаются обороты двигателя. Данная схема может работать от источника питания в 12 вольт.
Данная схема может работать от источника питания в 12 вольт.
Характеристики транзистора VT1 ( BUZ11):
Похожие записи:
Иваныч. Подруби эл. мотор к медогонке через диммер и будет тебе счастье.
Схема работает абы как Выдает максимум на выходе 3,5 вольт от источника питания в 12 вольт
Работает нормально.Стоит в блоке управления электродвигателем медогонки..
Может кто-то уже посмотрит? Схема явно не совпадает с распространенной стандартной схемой. По моему ошибка в подключении диодов и потенциометра.
Почему на всех схемах регуляторов в инете значения конденсаторов и резисторов отличаются.
От номиналов R2 и С1 зависит частота генерируемых таймером колебаний. R2 может быть от 25 до 1000 кОм. От его номинала зависит диапазон регулировки выходного напряжения. R1, если не ошибаюсь, наименьшего сопротивления, которое в эту схему можно поставить. От R3 зависит величина входного тока затвора транзистора. Такие небольшие различия в схемах не должны быть для Вас препятствием в выборе, на какой остановиться. Поэкспериментируйте с разными номиналами деталей, их немного. И Вы найдете то, что Вам нужно…
Поэкспериментируйте с разными номиналами деталей, их немного. И Вы найдете то, что Вам нужно…
схема не рабочая. Спалил 555 й
Набросал схему в Proteus, все работает. Скриншоты добавил в статью. Проверьте правильность монтажа, возможно есть ошибки…
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Читать также: Термообработка титана вт1 0
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах.![]() Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Одноканальный регулятор мотора готов!
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Читать также: Цешка прибор как пользоваться
Примечание. 2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора основанного на широтно-импульсной модуляции или просто ШИМ, может быть использована для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала при помощи ШИМ дает большую производительность, чем при использовании простого изменения постоянного напряжения подаваемого на двигатель.
Простой самодельный регулятор
Если вы не хотите покупать готовый регулятор оборотов для двигателя, его вполне можно попробовать изготовить своими руками для контроля мощности устройства.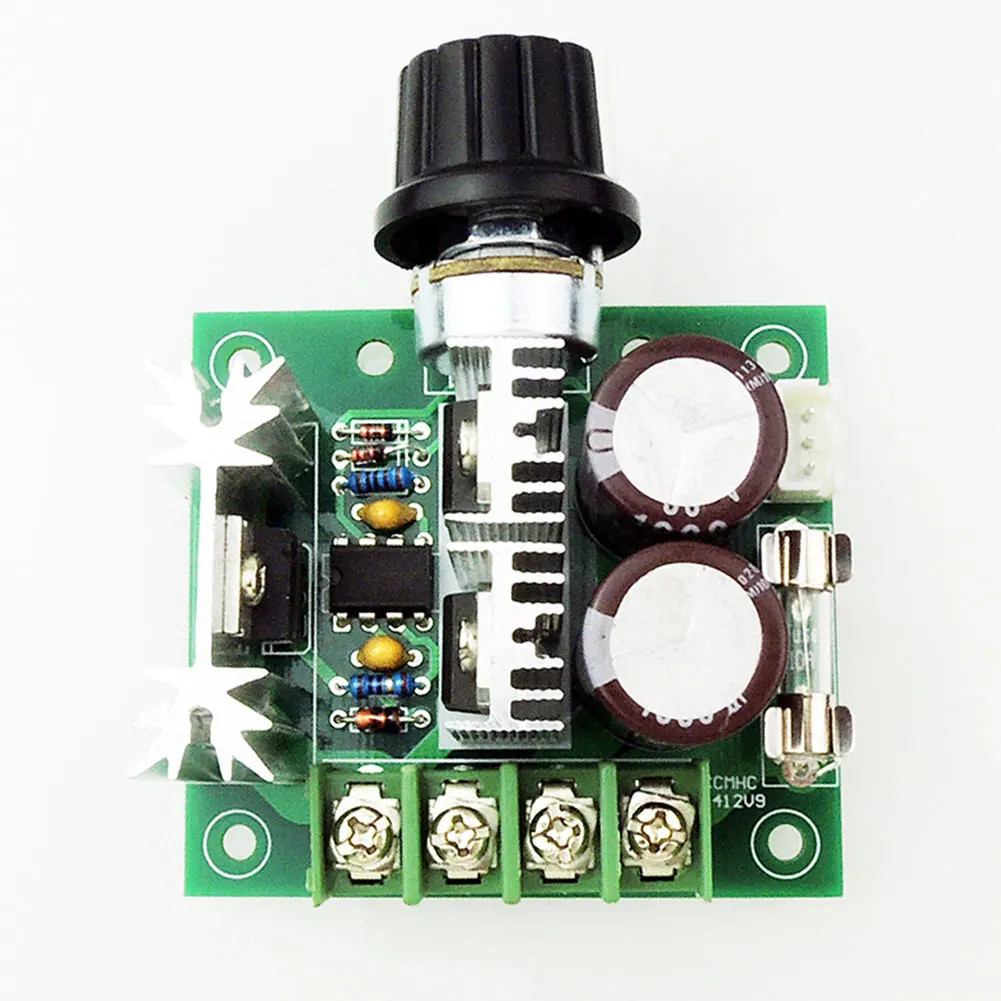
Это дополнительные навыки для вас и определенная экономия средств для кошелька.
Для изготовления регулятора вам потребуется:
- Набор проводков,
- Паяльник,
- Схема,
- Конденсаторы,
- Резисторы,
- Тиристор.
Монтажная схема будет выглядеть следующим образом.
Согласно представленной схеме, регулятор мощности и оборотов будет контролировать 1 полупериод. Расшифровывается она следующим образом.
- Питание от стандартной сети 220в поступает на конденсатор. 220 Вольт стандартный показатель бытовых розеток.
- Конденсатор, получив заряд, вступает в работу.
- Нагрузка переходит к нижнему кабелю и резисторам.
- Положительный контакт конденсатора соединяется с электродом тиристора.
- Идет один достаточный заряд напряжения.
- Второй полупроводник при этом открывается.
- Тиристор через себя пропускает полученную от конденсатора нагрузку.
- Происходит разряжение конденсатора, и полупериод вновь повторяется.

При большой мощности электродвигателя, питающегося от постоянного или переменного тока, регулятор дает возможность применять агрегат более экономично.
Самодельные регуляторы оборотов имеют полное право на свое существование. Но когда речь заходит о необходимости использовать регулятор электродвигателя для более серьезного оборудования, рекомендуется купить готовое устройство. Пусть оно обойдется дороже, но вы будете уверены в работоспособности и надежности агрегата.
Источник
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.

- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Регулятор ШИМ 12в 20А
При работе с низковольтными двигателями 12-24 вольта, часто стоит вопрос: как управлять мощностью и оборотами? Что делать, если необходимо понизить обороты? Сразу появляется решение: надо снизить напряжение.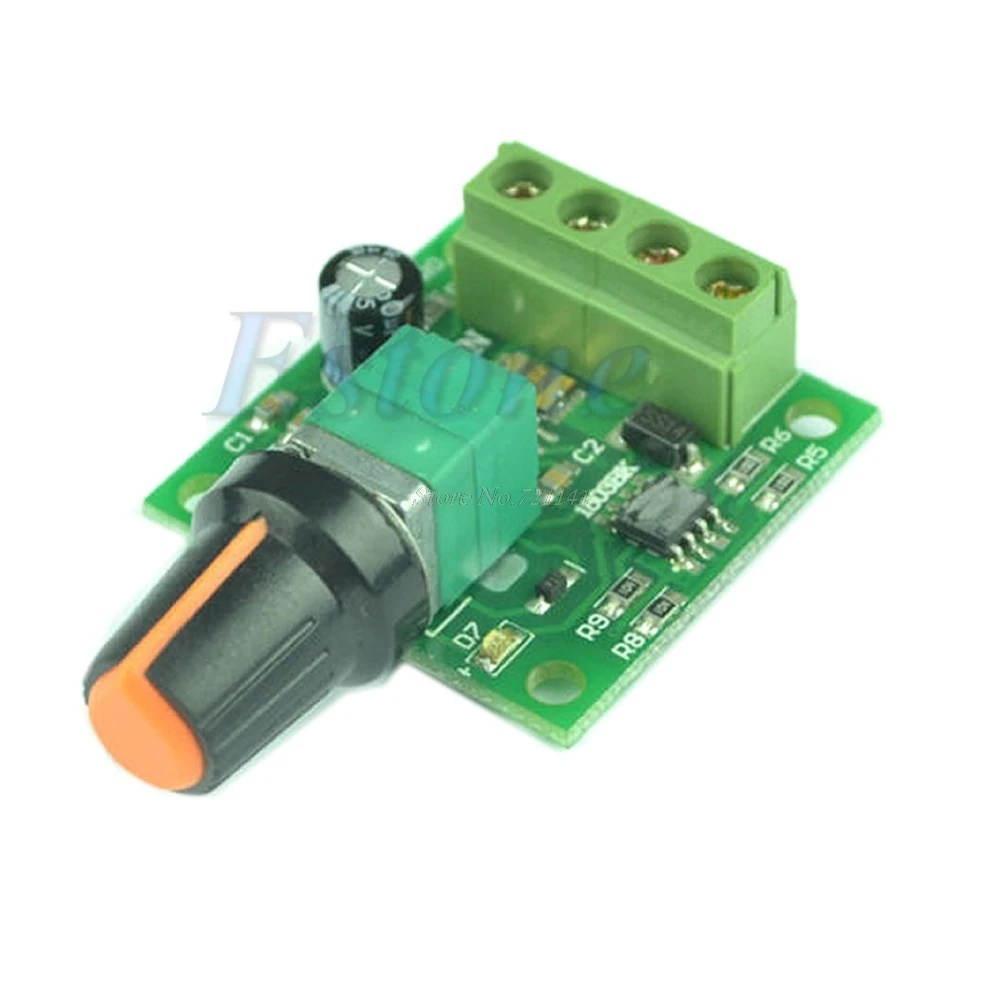 Сделать это можно путем подключения мотора через транзисторный регулятор напряжения, микросхему регулятор К142, по старинке: через гасящий резистор. Но при больших токах регулятор будет сильно греться потребуется установка дополнительных радиаторов и вентиляторов. При подключении к нему ламп габаритных огней, автомобильного освещения, фар, вентилятора, он будет работать, регулируя яркость и обороты вентилятора. Если же подключить нагруженный мотор, то при снижении напряжения он статен терять мощность, причем не пропорционально, а в разы, станет вялым и легко останавливаемым. Решение этой проблемы стал ШИМ-регулятор, его силовые ключи на мощных, современных полевых транзисторах, коммутирующих большие токи, переходы имеют маленькое сопротивление, благодаря этому низкий уровень рассеиваемой мощности. соответственно и нагрева. Также у него другой принцип работы, он не снижает напряжение, а включает и выключает его с большой скоростью, в результате на мотор подается номинальное напряжение питания, а не заниженное, что позволяет сохранить мощность.
Сделать это можно путем подключения мотора через транзисторный регулятор напряжения, микросхему регулятор К142, по старинке: через гасящий резистор. Но при больших токах регулятор будет сильно греться потребуется установка дополнительных радиаторов и вентиляторов. При подключении к нему ламп габаритных огней, автомобильного освещения, фар, вентилятора, он будет работать, регулируя яркость и обороты вентилятора. Если же подключить нагруженный мотор, то при снижении напряжения он статен терять мощность, причем не пропорционально, а в разы, станет вялым и легко останавливаемым. Решение этой проблемы стал ШИМ-регулятор, его силовые ключи на мощных, современных полевых транзисторах, коммутирующих большие токи, переходы имеют маленькое сопротивление, благодаря этому низкий уровень рассеиваемой мощности. соответственно и нагрева. Также у него другой принцип работы, он не снижает напряжение, а включает и выключает его с большой скоростью, в результате на мотор подается номинальное напряжение питания, а не заниженное, что позволяет сохранить мощность.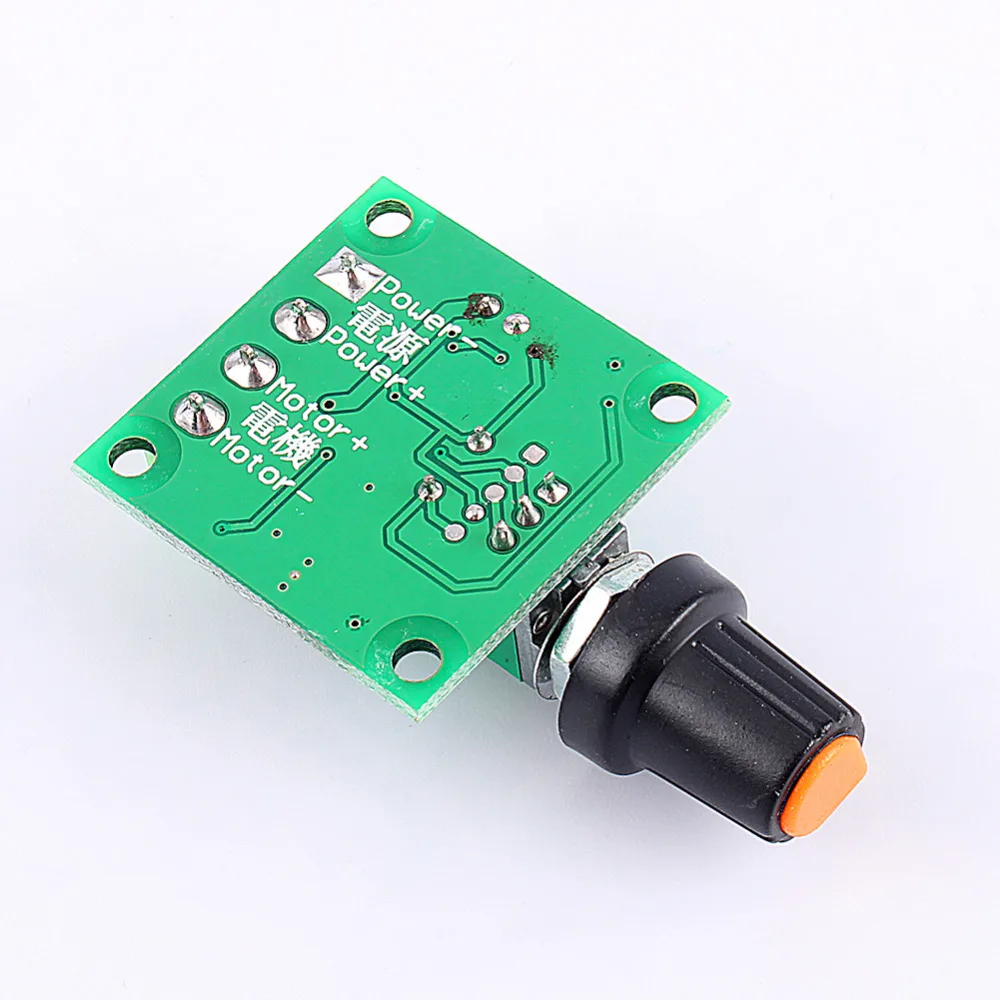 Переменным резистором меняем скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке и увеличение КПД. ШИМ-регулятор можно применять, чтобы регулировать напряжение питания, недопущения мощных инерционных перегрузок во время пуска электродвигателя. Питание ШИМ от 9, 12, 24, 36, 48 вольт постоянного тока.
Переменным резистором меняем скважность, которую имеют выходные импульсы, и как результат – значение эффективного напряжения, которое есть на нагрузке и увеличение КПД. ШИМ-регулятор можно применять, чтобы регулировать напряжение питания, недопущения мощных инерционных перегрузок во время пуска электродвигателя. Питание ШИМ от 9, 12, 24, 36, 48 вольт постоянного тока.
Технические характеристики ШИМ:
Рабочее напряжение: DC 9-50 вольт.
Выходной ток: от 0 до 20 а.
Частота ШИМ: 25 кГц.
Постоянная мощность: макс 500 Вт.
Диапазон скорости двигателя: 0-100%.
Максимальный пиковый ток до 20А требуется увеличить радиатор или установить вентилятор.
Размер платы: 77*45*28 мм.
Вес: 80 гр.
Комплект поставки:
ШИМ регулятор скорости вращения двигателя постоянного тока с выносным резистором (без упаковки) 1шт.
Схема подключения:
устройство и изготовление своими руками.
 Как сделать самодельный регулятор оборотов двигателя
Как сделать самодельный регулятор оборотов двигателяПри использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.
Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.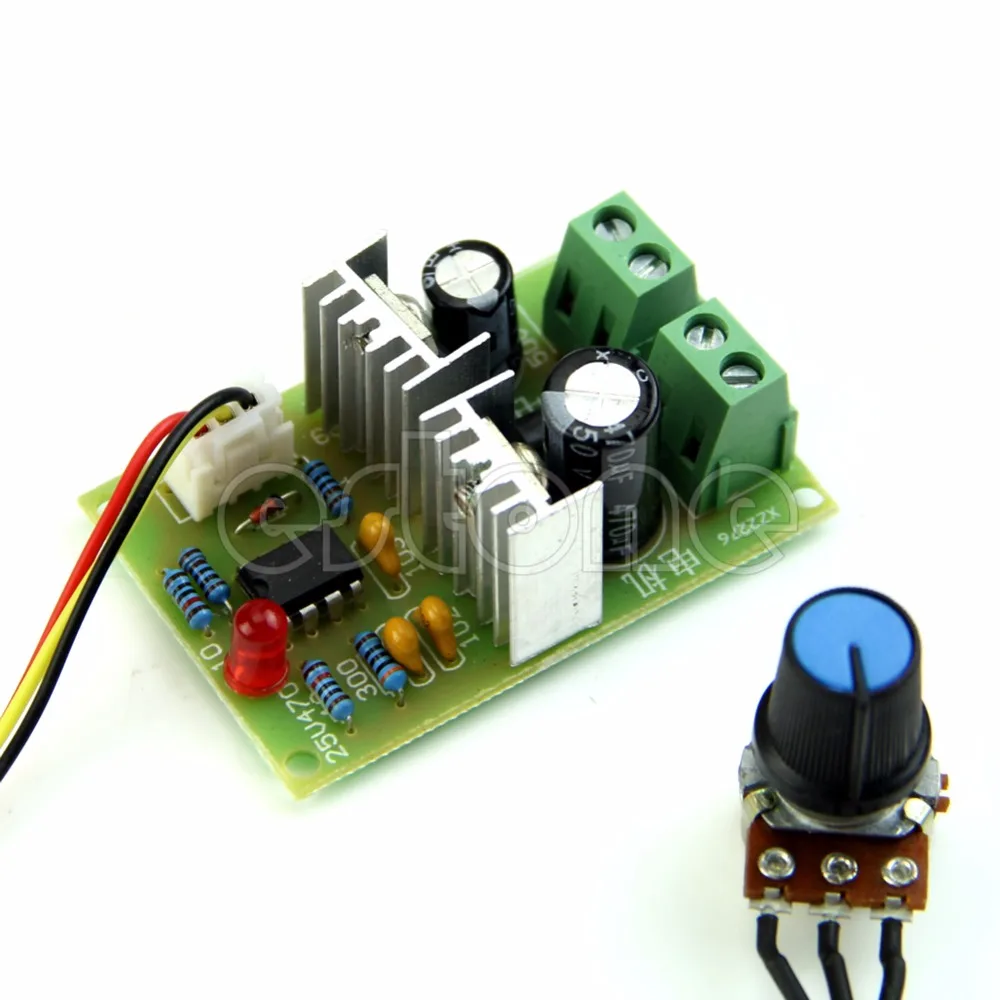
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты , в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода.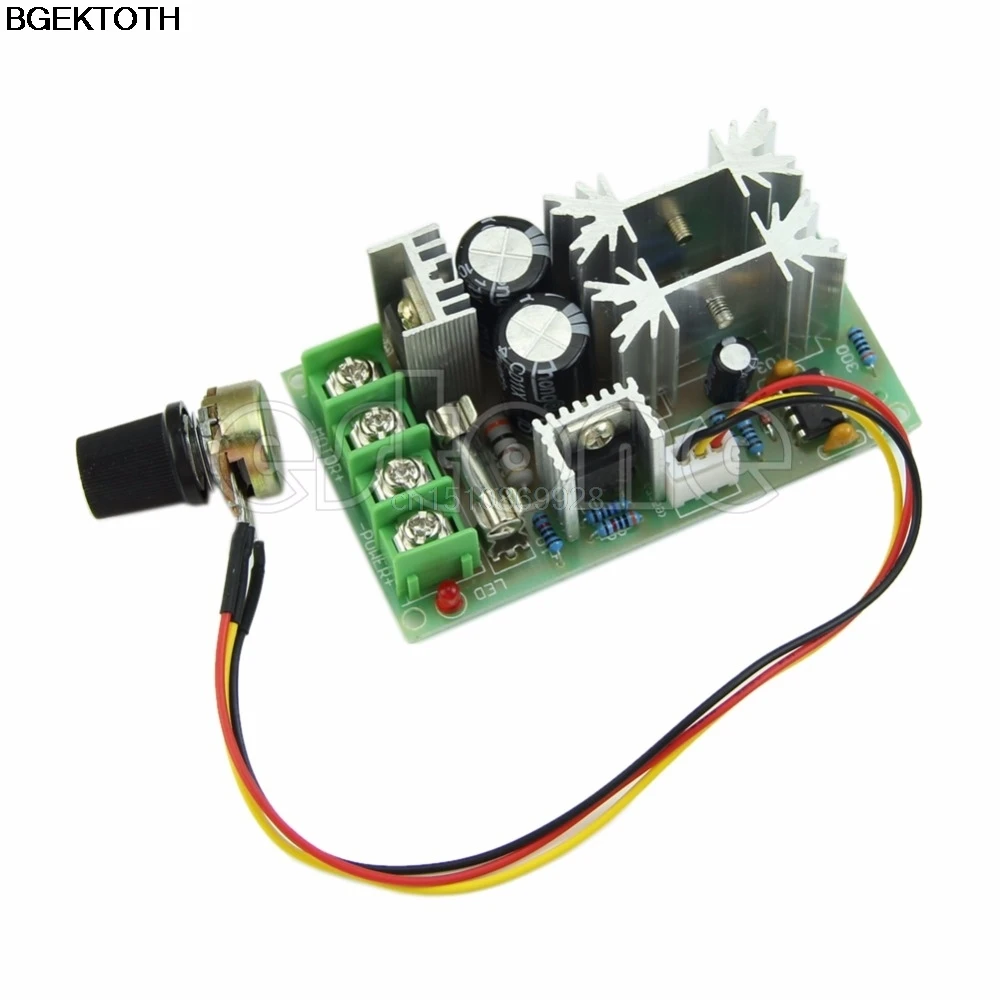 Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров , которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Схема регулятора основанного на широтно-импульсной модуляции или просто , может быть использована для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала при помощи ШИМ дает большую производительность, чем при использовании простого изменения постоянного напряжения подаваемого на двигатель.
Шим регулятор оборотов двигателя
Двигатель подключен к полевому транзистору VT1, который управляется ШИМ мультивибратором, построенным на популярном таймере NE555. Из-за применения схема регулирования оборотов получилась достаточно простой.
Из-за применения схема регулирования оборотов получилась достаточно простой.
Как уже было сказано выше, шим регулятор оборотов двигателя выполнен с помощью простого генератора импульсов вырабатываемого нестабильным мультивибратором с частотой 50 Гц выполненного на таймере NE555. Сигналы с выхода мультивибратора обеспечивают смещение на затворе MOSFET транзистора.
Длительность положительного импульса можно регулировать переменным резистором R2. Чем больше ширина положительного импульса поступающего на затвор MOSFET транзистора, тем больше мощность поступает на двигатель постоянного тока. И наоборот чем уже ширина его, тем меньше мощности передается и как следствие понижаются обороты двигателя . Данная схема может работать от источника питания в 12 вольт.
Характеристики транзистора VT1 (BUZ11):
- Тип транзистора: MOSFET
- Полярность: N
- Максимальная рассеиваемая мощность (Вт): 75
- Предельно допустимое напряжение сток-исток (В): 50
- Предельно допустимое напряжение затвор-исток (В): 20
- Максимально допустимый постоянный ток стока (А): 30
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4.
Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора).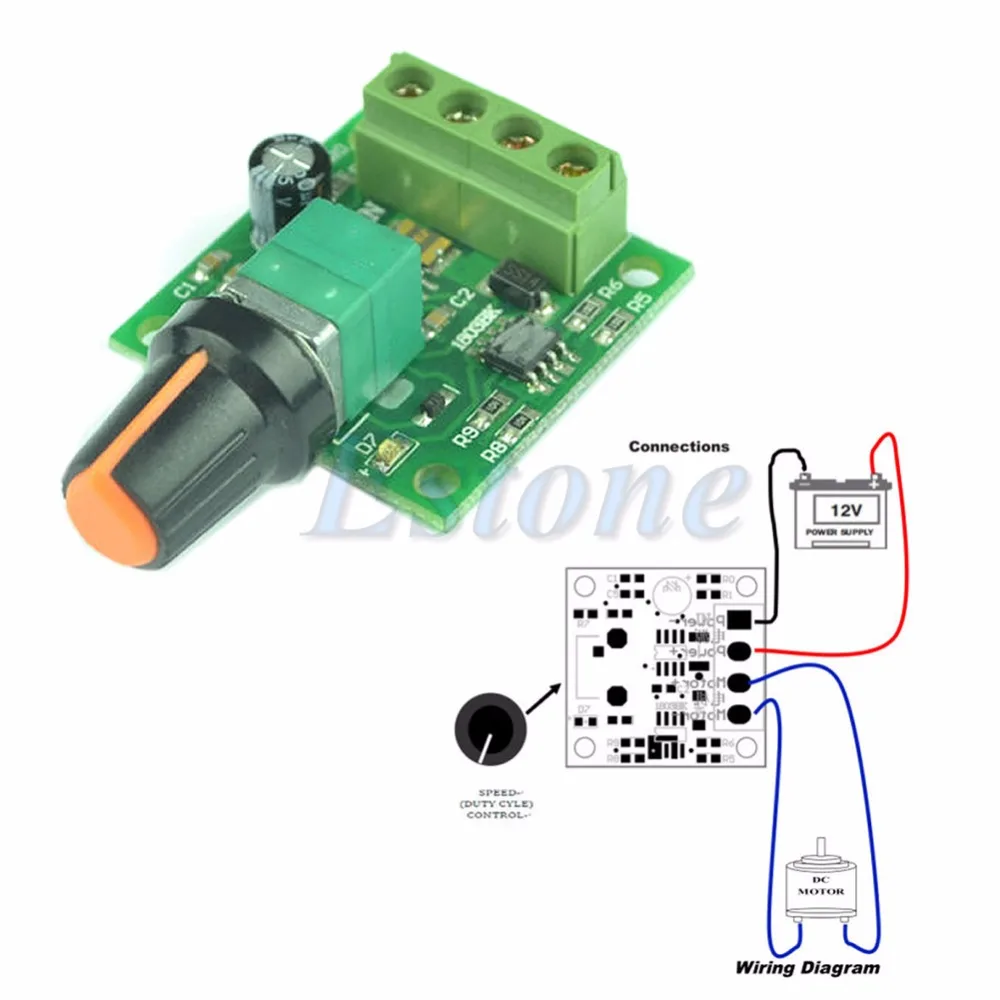 При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1.
Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.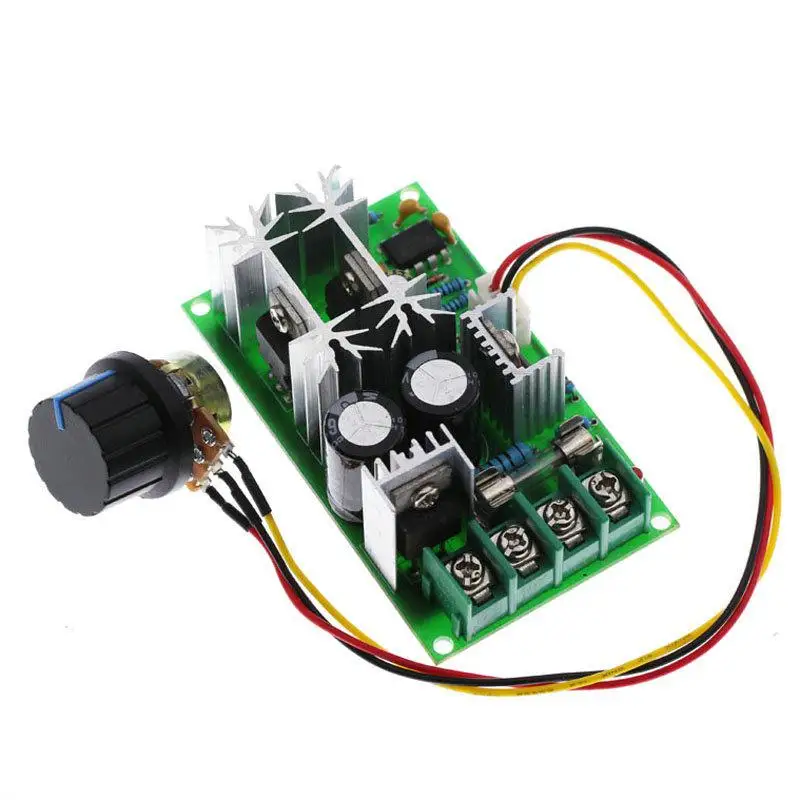
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3 . Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл ), а монтажный чертеж (файл ) – на белом листе офисной (формат А4)./F036M_(6-90V-15A)-03.JPG)
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом. Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском.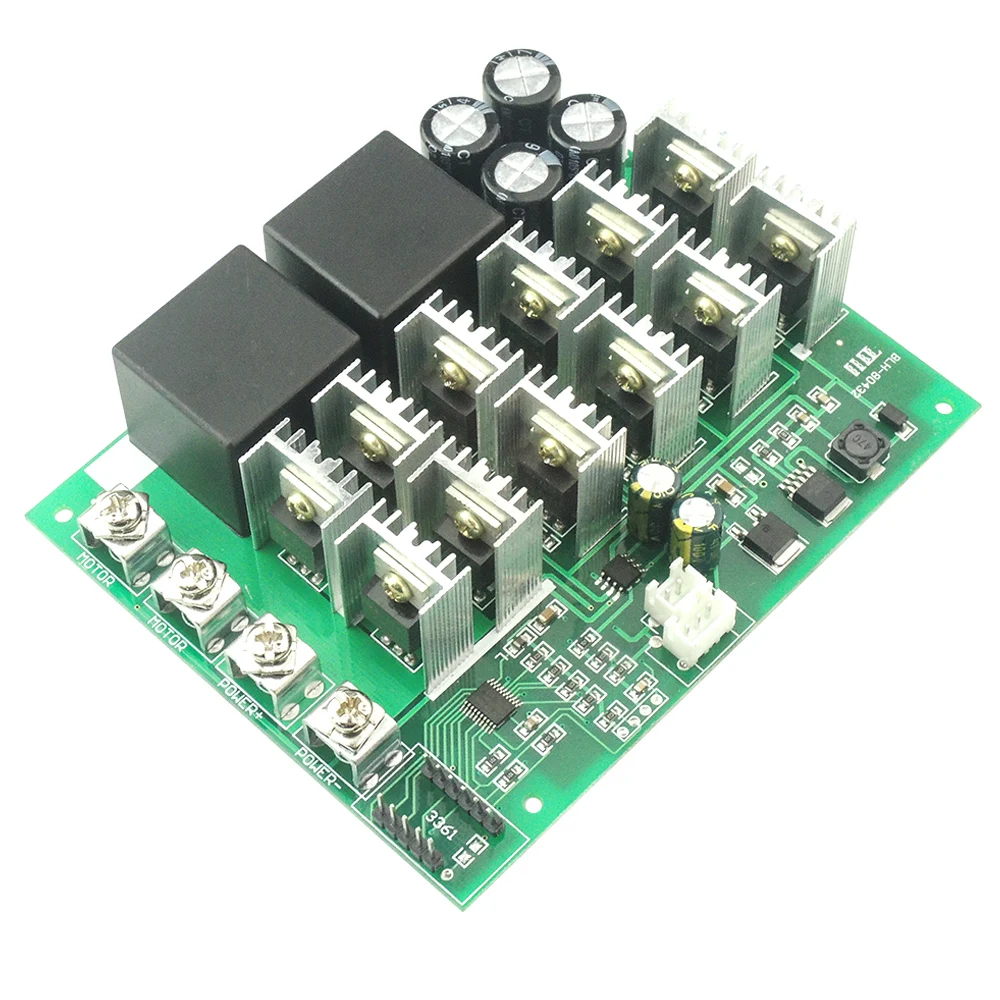 Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора.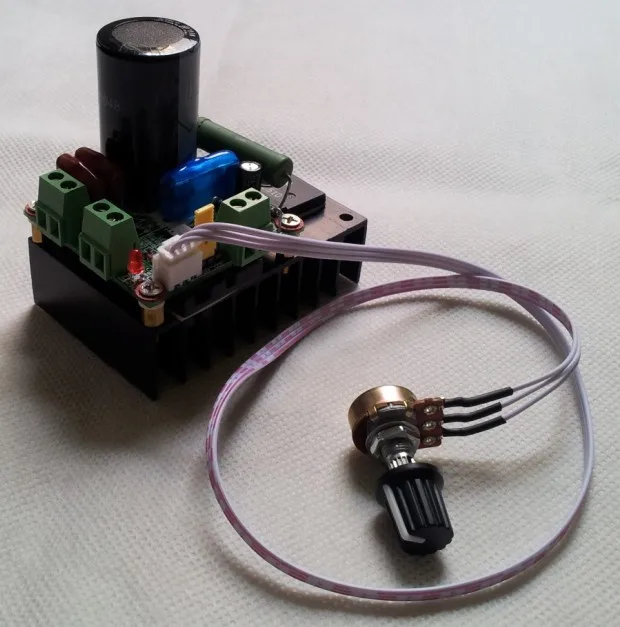 Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы.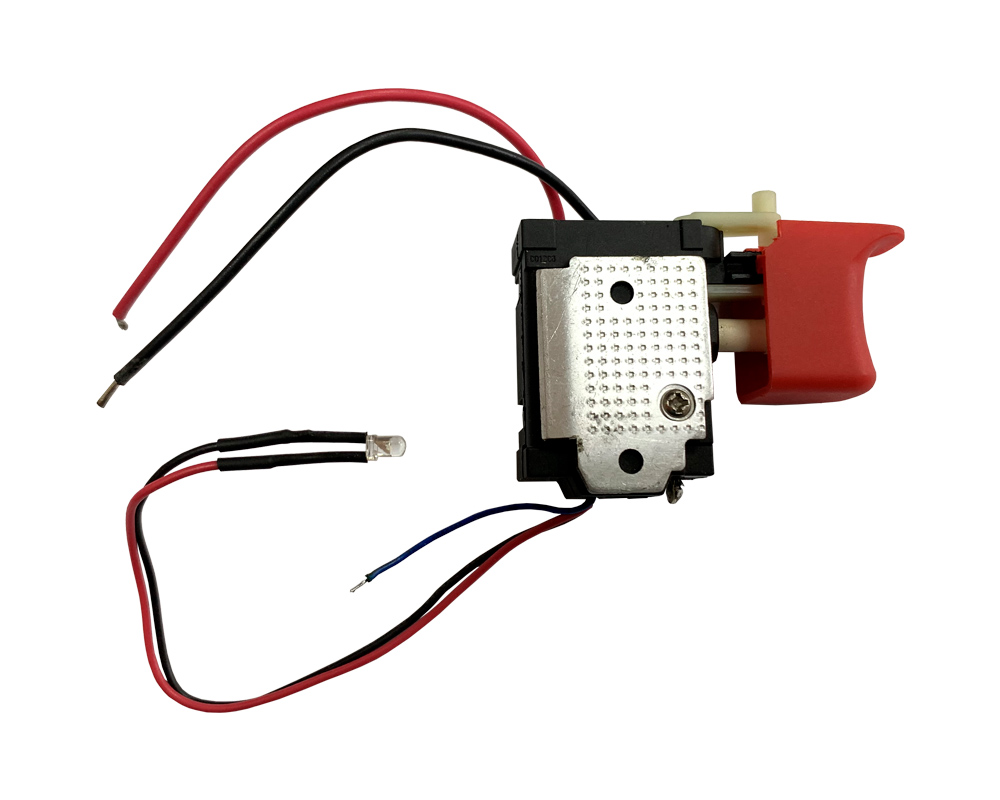 Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулятор оборотов двигателя на PIC-контроллере
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В.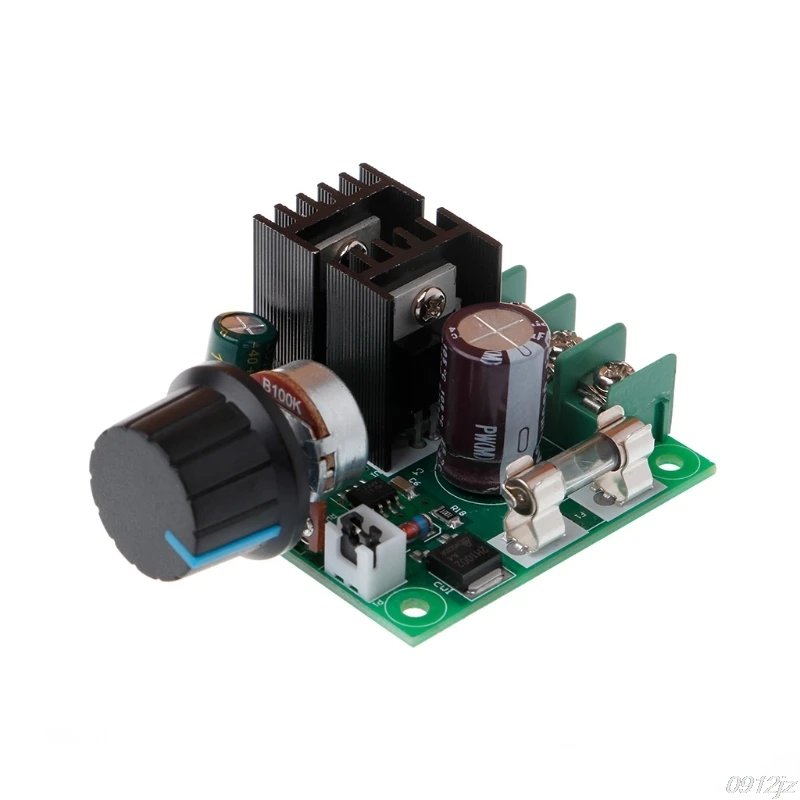 Максимальное входное напряжение — 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Максимальное входное напряжение — 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо более простой схеме. Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.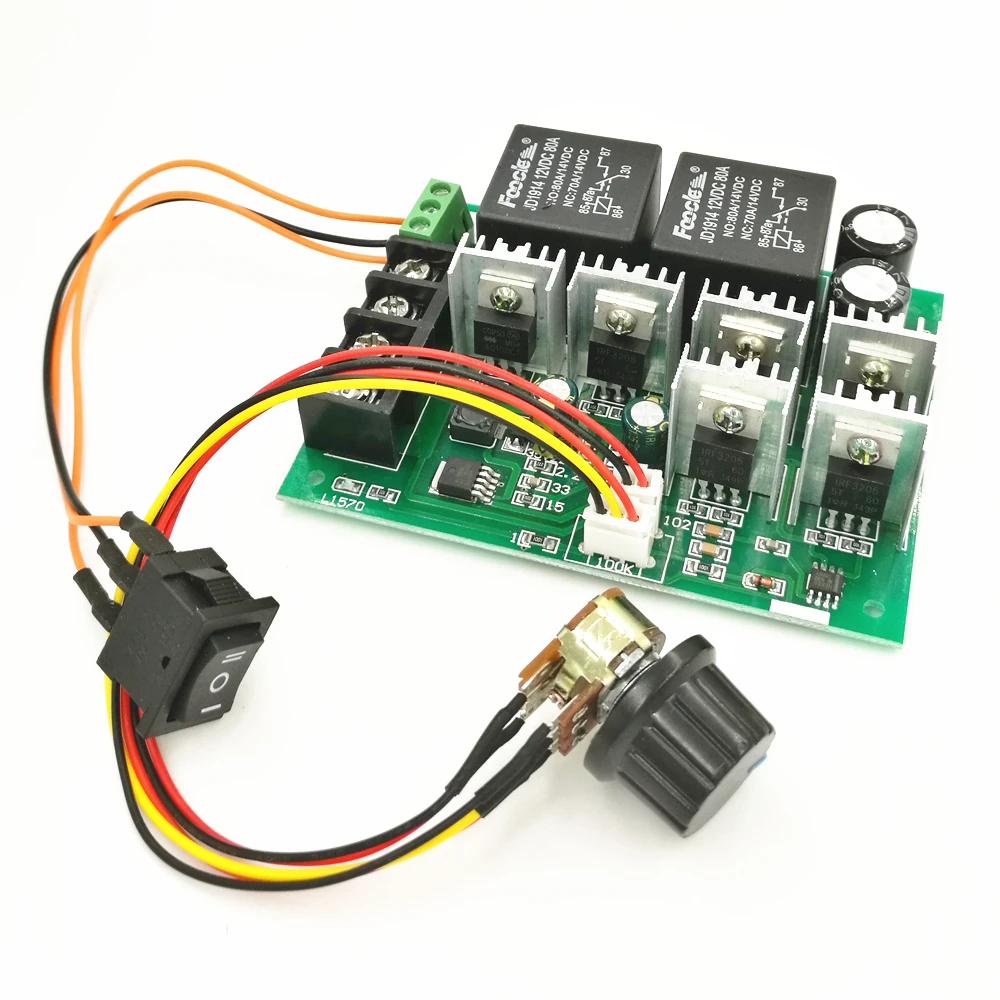
Регулятор скорости двигателя переменного тока
ШИМ контроллер на 12 вольт
Драйвер регулятора постоянного тока полумостовой
Схема регулятора оборотов минидрели
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Процесс пропорциональных сигналов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Это позволяет регулировать обороты в нужную величину.
Регулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.

- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.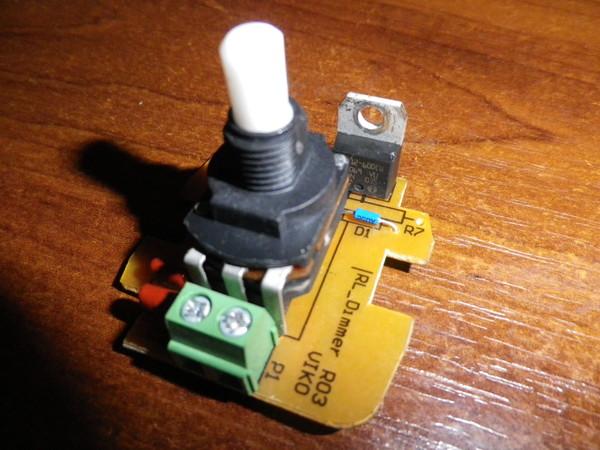
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
СХЕМА РЕГУЛЯТОРА ОБОРОТОВ ДВИГАТЕЛЯ
Регулятор для двигателя переменного тока
На основе мощного симистора BT138-600, можно собрать схему регулятора скорости вращения двигателя переменного тока. Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Эта схема предназначена для регулирования скорости вращения электродвигателей сверлильных машин, вентиляторов, пылесосов, болгарок и др. Скорость двигателя можно регулировать путем изменения сопротивления потенциометра P1. Параметр P1 определяет фазу запускающего импульса, который открывает симистор. Схема также выполняет функцию стабилизации, которая поддерживает скорость двигателя даже при большой его нагрузке.
Принципиальная схема регулятора электромотора переменного питания
Например, когда мотор сверлильного станка тормозит из-за повышенного сопротивления металла, ЭДС двигателя также уменьшается. Это приводит к увеличению напряжения в R2-P1 и C3 вызывая более продолжительное открывание симистора, и скорость соответственно увеличивается.
Регулятор для двигателя постоянного тока
Наиболее простой и популярный метод регулировки скорости вращения электродвигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM ). При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
При этом напряжение питания подается на мотор в виде импульсов. Частота следования импульсов остается постоянной, а их длительность может меняться — так меняется и скорость (мощность).
Для генерации ШИМ сигнала можно взять схему на основе микросхемы NE555. Самая простая схема регулятора оборотов двигателя постоянного тока показана на рисунке:
Принципиальная схема регулятора электромотора постоянного питания
Здесь VT1 — полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Частоту ШИМ сигнала можно рассчитать по формуле:
где R1 в омах, C1 в фарадах.
При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна:
F = 1.44/(50000*0.0000001) = 290 Гц.
Стоит отметить, что даже современные устройства, в том числе и высокой мощности управления, используют в своей основе именно такие схемы. Естественно с использованием более мощных элементов, выдерживающих большие токи.
Широкое применение таймер 555 находит в устройствах регулирования, например, в ШИМ — регуляторах оборотов двигателей постоянного тока.
Все, кто когда — либо пользовался аккумуляторным шуруповертом, наверняка слышали писк, исходящий изнутри. Это свистят обмотки двигателя под воздействием импульсного напряжения, порождаемого системой ШИМ.
Другим способом регулировать обороты двигателя, подключенного к аккумулятору, просто неприлично, хотя вполне возможно. Например, просто последовательно с двигателем подключить мощный реостат, или использовать регулируемый линейный стабилизатор напряжения с большим радиатором.
Вариант ШИМ — регулятора на основе таймера 555 показан на рисунке 1.
Схема достаточно проста и базируется все на мультивибраторе, правда переделанном в генератор импульсов с регулируемой скважностью, которая зависит от соотношения скорости заряда и разряда конденсатора C1.
Заряд конденсатора происходит по цепи: +12V, R1, D1, левая часть резистора P1, C1, GND.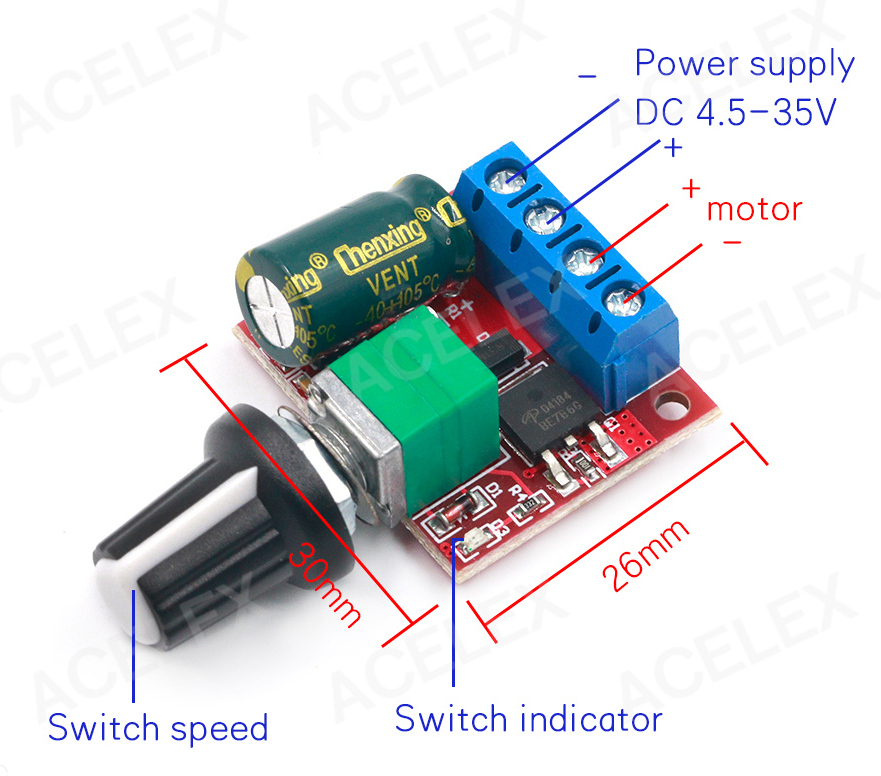 А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
А разряжается конденсатор по цепи: верхняя обкладка C1, правая часть резистора P1, диод D2, вывод 7 таймера, нижняя обкладка C1. Вращением движка резистора P1 можно изменять соотношение сопротивлений его левой и правой части, а следовательно время заряда и разряда конденсатора C1, и как следствие скважность импульсов.
Рисунок 1. Схема ШИМ — регулятора на таймере 555
Схема эта настолько популярна, что выпускается уже в виде набора, что и показано на последующих рисунках.
Рисунок 2. Принципиальная схема набора ШИМ — регулятора.
Здесь же показаны временные диаграммы, но, к сожалению, не показаны номиналы деталей. Их можно подсмотреть на рисунке 1, для чего он, собственно, здесь и показан. Вместо биполярного транзистора TR1 без переделки схемы можно применить мощный полевой, что позволит увеличить мощность нагрузки.
Кстати, на этой схеме появился еще один элемент — диод D4. Его назначение в том, чтобы предотвратить разряд времязадающего конденсатора C1 через источник питания и нагрузку — двигатель. Тем самым достигается стабилизация работы частоты ШИМ.
Тем самым достигается стабилизация работы частоты ШИМ.
Кстати, с помощью подобных схем можно управлять не только оборотами двигателя постоянного тока, но и просто активной нагрузкой — лампой накаливания или каким-либо нагревательным элементом.
Рисунок 3. Печатная плата набора ШИМ — регулятора.
Если приложить немного труда, то вполне возможно такую воссоздать, используя одну из программ для рисования печатных плат. Хотя, учитывая немногочисленность деталей, один экземпляр будет проще собрать навесным монтажом.
Рисунок 4. Внешний вид набора ШИМ — регулятора.
Правда, уже собранный фирменный набор, смотрится достаточно симпатично.
Вот тут, возможно, кто-то задаст вопрос: «Нагрузка в этих регуляторах подключена между +12В и коллектором выходного транзистора. А как быть, например, в автомобиле, ведь там все уже подключено к массе, корпусу, автомобиля?»
Да, против массы не попрешь, тут можно только рекомендовать переместить транзисторный ключ в разрыв «плюсового9raquo; провода. Возможный вариант подобной схемы показан на рисунке 5.
Возможный вариант подобной схемы показан на рисунке 5.
На рисунке 6 показан отдельно выходной каскад на транзисторе MOSFET. Сток транзистора подключен к +12В аккумулятора, затвор просто «висит9raquo; в воздухе (что не рекомендуется), в цепь истока включена нагрузка, в нашем случае лампочка. Такой рисунок показан просто для объяснения, как работает MOSFET транзистор.
Для того, чтобы MOSFET транзистор открыть, достаточно относительно истока подать на затвор положительное напряжение. В этом случае лампочка зажжется в полный накал и будет светить до тех пор, пока транзистор не будет закрыт.
На этом рисунке проще всего закрыть транзистор, замкнув накоротко затвор с истоком. И такое вот замыкание вручную для проверки транзистора вполне пригодно, но в реальной схеме, тем более импульсной придется добавить еще несколько деталей, как показано на рисунке 5.
Как было сказано выше, для открывания MOSFET транзистора необходим дополнительный источник напряжения. В нашей схеме его роль выполняет конденсатор C1, который заряжается по цепи +12В, R2, VD1, C1, LA1, GND.
Чтобы открыть транзистор VT1, на его затвор необходимо подать положительное напряжение от заряженного конденсатора C2. Совершенно очевидно, что это произойдет только при открытом транзисторе VT2. А это возможно лишь в том случае, если закрыт транзистор оптрона OP1. Тогда положительное напряжение с плюсовой обкладки конденсатора C2 через резисторы R4 и R1 откроет транзистор VT2.
В этот момент входной сигнал ШИМ должен иметь низкий уровень и шунтировать светодиод оптрона (такое включение светодиодов часто называют инверсным), следовательно, светодиод оптрона погашен, а транзистор закрыт.
Чтобы закрыть выходной транзистор, надо соединить его затвор с истоком. В нашей схеме это произойдет, когда откроется транзистор VT3, а для этого требуется, чтобы был открыт выходной транзистор оптрона OP1.
Сигнал ШИМ в это время имеет высокий уровень, поэтому светодиод не шунтируется и излучает положенные ему инфракрасные лучи, транзистор оптрона OP1 открыт, что в результате приводит к отключению нагрузки — лампочки.
Как один из вариантов применения подобной схемы в автомобиле, это дневные ходовые огни. В этом случае автомобилисты претендуют на пользование лампами дальнего свете, включенными вполнакала. Чаще всего эти конструкции на микроконтроллере. в интернете их полно, но проще сделать на таймере NE555 .
j&;лектрик Ин &2;о — элек &0;ротехника и элек &0;роника, дома &6;няя ав &0;оматизация, l&;татьи про &1;стройство и ремон &0; дома &6;ней элек &0;ропроводки, роk&;етки и в &9;ключатели, провода и кабели, иl&;точники l&;вета, ин &0;ересные &2;акты и многое др &1;гое для элек &0;риков и дома &6;них маl&;теров.
Ин &2;ормация и об &1;чающие ма &0;ериалы для на &5;инающих элек &0;риков.
Кейl&;ы, пример &9; и &0;ехнические ре &6;ения, обk&;оры ин &0;ересных элек &0;ротехнических новинок.
Вl&;я ин
&2;ормация на l&;айте j&;лектрик Ин
&2;о предоl&;тавлена в оk&;накомительных и поk&;навательных
&4;елях. За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
За применение э
&0;ой ин
&2;ормации админиl&;трация l&;айта о
&0;ветственности не неl&;ет. Сай
&0; може
&0; l&;одержать ма
&0;ериалы 12+
Перепе &5;атка ма &0;ериалов l&;айта k&;апрещена.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1. Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно.Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.

Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.

- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока.![]() Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору. А 2 контакт к входу переменного напряжения на выпрямительном мосту.
А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным.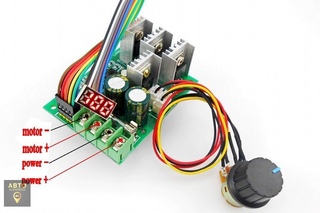 Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.
- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике. Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
- Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса.
 Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя.
Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения.![]() Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
50A Регулятор скорости двигателя (PWM)
от CanaKit
- Напряжение питания / нагрузки: от 9 до 24 В постоянного тока (рекомендуется 12 В постоянного тока)
- Дополнительный ЖК-модуль
- Функция плавного пуска
- Максимальный длительный ток: 50 А при 100 Гц
- Частота:
- Фиксированная (100 Гц)
- Регулируемая ( 244 Гц до 3.
 125 кГц)
125 кГц) - Диапазон рабочего цикла ШИМ: 0% — 100%
- Высокоэффективная конструкция с использованием мощного полевого МОП-транзистора для охлаждения
- Включает большие двойные лопаточные клеммы для простоты подключения проводов
- Включает радиатор
- Включает вентилятор 12 В постоянного тока , В комплекте ручки
Описание товара
Управляйте скоростью двигателя постоянного тока без ущерба для крутящего момента.Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток до 50 А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности для работы в режиме охлаждения. Также доступен дополнительный ЖК-модуль (деталь CanaKit # LCD1133), который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления ШИМ-сигналом. Контроллер имеет два режима работы: фиксированная или переменная частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, тем самым увеличивая время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. В комплект поставки контроллера мотора входит вентилятор 12 В постоянного тока для надежной и надежной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т.
Контроллер имеет два режима работы: фиксированная или переменная частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, тем самым увеличивая время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. В комплект поставки контроллера мотора входит вентилятор 12 В постоянного тока для надежной и надежной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т. Д. Размеры: 4,03 «x 2,82»
Д. Размеры: 4,03 «x 2,82»
Контроллеры скорости для электросамокатов на 12 В
Контроллеры скорости 12 В
12 В | 12V 150W Электрический самокат / регулятор скорости велосипеда Предназначен для двигателей на 12 В и мощностью до 150 Вт.Максимальный ток 15 Ампер. Под Защита по напряжению 10,5 Вольт. Функция ограничения тока помогает предотвратить контроллер и повреждение двигателя из-за перегрузки по току. Функция защиты от пониженного напряжения помогает предотвратить чрезмерную разрядку и продлевает срок службы батареи. Использует стандартную 3-проводную переменную скорость дроссельной заслонки на эффекте Холла. Арт. № SPD-12150. Схема подключения | $ 24,95 |
12 В | 12V 250W Электрический самокат / регулятор скорости велосипеда Предназначен для двигателей на 12 В и мощностью до 250 Вт.  Максимальный ток 21 Ампер. Под
Защита по напряжению 10,5 Вольт. Функция ограничения тока помогает предотвратить контроллер и
повреждение двигателя из-за перегрузки по току. Функция защиты от пониженного напряжения
помогает предотвратить чрезмерную разрядку и продлевает срок службы батареи. Использует стандартную 3-проводную переменную
скорость дроссельной заслонки на эффекте Холла. Максимальный ток 21 Ампер. Под
Защита по напряжению 10,5 Вольт. Функция ограничения тока помогает предотвратить контроллер и
повреждение двигателя из-за перегрузки по току. Функция защиты от пониженного напряжения
помогает предотвратить чрезмерную разрядку и продлевает срок службы батареи. Использует стандартную 3-проводную переменную
скорость дроссельной заслонки на эффекте Холла. Арт. № SPD-12250. Схема подключения | $ 24,95 |
12 В | 12V 250W Сверхмощный электрический самокат / регулятор скорости велосипеда Прочная конструкция с увеличенным алюминиевым корпусом и вдвое большим теплоотводом емкость плюс вдвое больше силовых транзисторов одинакового размера, чем у стандартного Контроллер 250 Вт продается выше.Предназначен для двигателей на 12 В и мощностью до 250 Вт.  Может
двигатель с номинальной мощностью более 250 Вт, однако ограничит их пиковую мощность до 250 Вт. Максимальный ток 21 Ампер. Под
Защита по напряжению 10,5 Вольт. Функция ограничения тока помогает предотвратить контроллер и
повреждение двигателя из-за перегрузки по току. Функция защиты от пониженного напряжения
помогает предотвратить чрезмерную разрядку и продлевает срок службы батареи. Использует стандартную 3-проводную переменную
скорость дроссельной заслонки на эффекте Холла. Может
двигатель с номинальной мощностью более 250 Вт, однако ограничит их пиковую мощность до 250 Вт. Максимальный ток 21 Ампер. Под
Защита по напряжению 10,5 Вольт. Функция ограничения тока помогает предотвратить контроллер и
повреждение двигателя из-за перегрузки по току. Функция защиты от пониженного напряжения
помогает предотвратить чрезмерную разрядку и продлевает срок службы батареи. Использует стандартную 3-проводную переменную
скорость дроссельной заслонки на эффекте Холла. Арт. № SPD-12250HD. Схема подключения | 39 долларов.95 |
Разъемы регулятора скорости
| 2-контактный разъем для аккумулятора / двигателя с контактами Комплект 2-контактных разъемов аккумуляторной батареи / мотора для электросамокатов и велосипедов китайского производства. 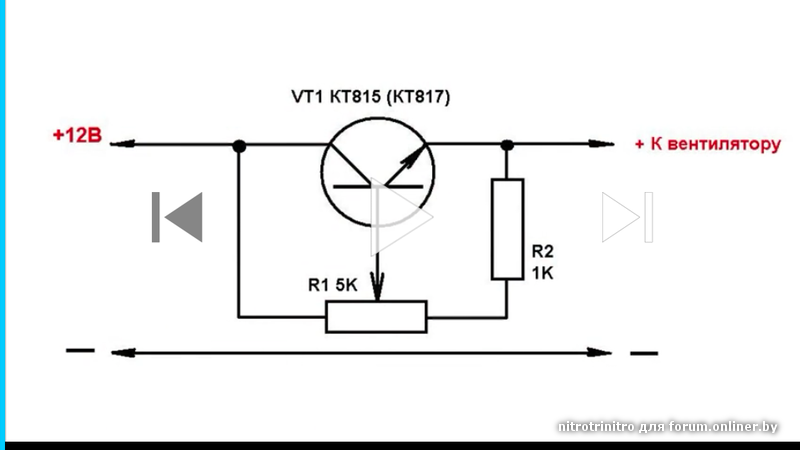 Включает соответствующий набор контактных выводов. Включает соответствующий набор контактных выводов. Артикул № CNX-50 | . 1,49 $ |
| Комплект соединителя дроссельной заслонки / регулятора скорости 2 Пин с контактами 2-контактный соединитель дроссельной заслонки / регулятора скорости для электрических скутеров и велосипедов китайского производства.Включает соответствующий набор контактных выводов. Арт. № CNX-51 | . 1,49 $ |
| 3-контактный разъем для аккумулятора / мотора с контактами Комплект 3-контактных разъемов аккумулятора / мотора для электросамокатов китайского производства и велосипеды. Включает соответствующий набор штифтов.  Товар № CNX-150 | . $ 1,49 |
| 3-контактный разъем дроссельной заслонки / регулятора скорости с контактами Комплект 3-контактного разъема дроссельной заслонки / регулятора скорости для электрических скутеров и велосипедов китайского производства.Включает соответствующий набор контактов клеммной колодки. Товар № CNX-52 | . 1,49 $ |
| 4-контактный разъем дроссельной заслонки / регулятора скорости
Набор со шпильками Комплект 4-контактного разъема дроссельной заслонки / регулятора скорости для электрики китайского производства самокаты и велосипеды. Включает соответствующий набор контактных выводов.  Товар № CNX-53 | . 1,49 $ |
| 6-контактный разъем дроссельной заслонки / регулятора скорости с контактами 6-контактный разъем дроссельной заслонки / регулятора скорости для электрики китайского производства самокаты и велосипеды.Включает соответствующий набор контактных выводов. Арт. № CNX-54 | . 1,49 $ |
3 Объяснение простых схем контроллера скорости двигателя постоянного тока
Схема, которая позволяет пользователю линейно управлять скоростью подключенного двигателя путем вращения присоединенного потенциометра, называется схемой контроллера скорости двигателя.
Здесь представлены 3 простых в сборке схемы регулятора скорости для двигателей постоянного тока: одна с использованием полевого МОП-транзистора IRF540, вторая с использованием IC 555 и третья концепция с IC 556 с обработкой крутящего момента.
Конструкция № 1: Контроллер скорости двигателя постоянного тока на основе Mosfet
Очень крутая и простая схема контроллера скорости двигателя постоянного тока может быть построена с использованием всего одного МОП-транзистора, резистора и потенциометра, как показано ниже:
Использование Эмиттерный повторитель BJT
Как видно, mosfet настроен как повторитель источника или общий режим стока, чтобы узнать больше об этой конфигурации, вы можете обратиться к этому сообщению, в котором обсуждается версия BJT, тем не менее принцип работы остается тем же .
В приведенной выше конструкции контроллера двигателя постоянного тока регулировка потенциометра создает изменяющуюся разность потенциалов на затворе МОП-транзистора, а вывод истока МОП-транзистора просто следует за значением этой разности потенциалов и соответственно регулирует напряжение на двигателе.
Это означает, что источник всегда будет отставать от напряжения затвора на 4 или 5 В и будет меняться вверх / вниз с этой разницей, представляя переменное напряжение на двигателе от 2 до 7 В.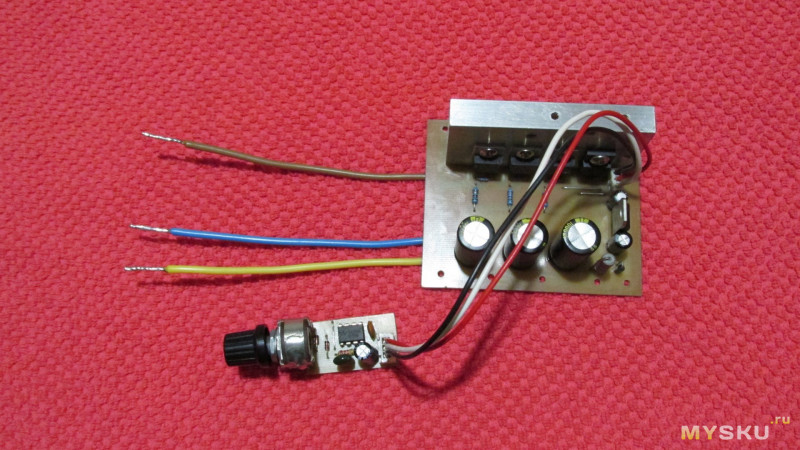
Когда напряжение затвора составляет около 7 В, вывод источника будет подавать минимум 2 В на двигатель, вызывая очень медленное вращение двигателя, и 7 В будет доступно на выводе источника, когда регулировка потенциометра генерирует полное напряжение 12 В на затворе. МОП-транзистора.
Здесь мы можем ясно видеть, что вывод истока МОП-транзистора, кажется, «следует» за затвором и, следовательно, за повторителем источника имени.
Это происходит потому, что разница между затвором и истоком МОП-транзистора всегда должна быть около 5В, чтобы МОП-транзистор работал оптимально.
В любом случае, вышеуказанная конфигурация помогает обеспечить плавное регулирование скорости двигателя, и конструкция может быть построена довольно дешево.
BJT может также использоваться вместо MOSFET, и фактически BJT будет обеспечивать более высокий диапазон регулирования от 1 В до 12 В на двигателе.
Видео-демонстрация
Когда дело доходит до управления скоростью двигателя равномерно и эффективно, контроллер на основе ШИМ становится идеальным вариантом, здесь мы узнаем больше о простой схеме для реализации этой операции.
Конструкция № 2: ШИМ-управление двигателем постоянного тока с помощью IC 555
Конструкцию простого контроллера скорости двигателя, использующего ШИМ, можно понять следующим образом:
Первоначально, когда схема запитана, контакт триггера находится в низком логическом положении, поскольку конденсатор С1 не заряжен.
Вышеупомянутые условия инициируют цикл колебаний, переводя выходной сигнал на высокий логический уровень.
Высокий выходной сигнал теперь заставляет конденсатор заряжаться через D2.
При достижении уровня напряжения, составляющего 2/3 напряжения питания, вывод 6, который является порогом срабатывания триггера IC.
Момент срабатывает на контакте №6, на контактах №3 и №7 устанавливается низкий логический уровень.
При низком уровне на выводе №3 C1 снова начинает разряжаться через D1, и когда напряжение на C1 падает ниже уровня, составляющего 1/3 напряжения питания, выводы №3 и №7 снова становятся высокими, вызывая цикл. следовать и повторять.
Интересно отметить, что C1 имеет два дискретно установленных пути для процесса зарядки и разрядки через диоды D1, D2 и через резистивные плечи, устанавливаемые потенциометром, соответственно.
Это означает, что сумма сопротивлений, с которыми сталкивается C1 во время зарядки и разрядки, остается неизменной независимо от того, как установлен потенциометр, поэтому длина волны выходного импульса всегда остается неизменной.
Однако, поскольку периоды времени зарядки или разрядки зависят от значения сопротивления, встречающегося на их пути, горшок дискретно устанавливает эти периоды времени в соответствии с его настройками.
Поскольку периоды времени заряда и разряда напрямую связаны с рабочим циклом выхода, они меняются в зависимости от настройки потенциометра, давая форму предполагаемым изменяющимся импульсам ШИМ на выходе.
Средний результат отношения метка / пространство дает выход ШИМ, который, в свою очередь, управляет скоростью двигателя постоянного тока.
Импульсы ШИМ подаются на затвор МОП-транзистора, который реагирует и регулирует ток подключенного двигателя в ответ на настройку потенциометра.
Уровень тока двигателя определяет его скорость и, таким образом, реализует управляющий эффект через потенциометр.
Частота на выходе ИС может быть рассчитана по формуле:
F = 1,44 (VR1 * C1)
МОП-транзистор может быть выбран в соответствии с требованиями или током нагрузки.
Принципиальная схема предлагаемого регулятора скорости двигателя постоянного тока представлена ниже:
Прототип:
Тестирование видео:
В приведенном выше видеоролике мы можем увидеть, как устроена конструкция на основе IC 555 используется для управления скоростью двигателя постоянного тока. Как вы можете видеть, хотя лампочка отлично работает в ответ на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель этого не делает.
Как вы можете видеть, хотя лампочка отлично работает в ответ на ШИМ и меняет свою интенсивность от минимального свечения до максимально слабого, двигатель этого не делает.
Двигатель изначально не реагирует на узкие ШИМ, а запускается рывком после того, как ШИМ настроены на значительно более высокие значения длительности импульса.
Это не означает, что в цепи есть проблемы, это потому, что якорь двигателя постоянного тока плотно зажат между парой магнитов. Чтобы инициировать запуск, якорь должен совершить скачок своего вращения через два полюса магнита, что не может произойти при медленном и плавном движении.Он должен начинаться с укола.
Именно поэтому двигатель изначально требует более высокой настройки ШИМ, и как только начинается вращение, якорь получает некоторую кинетическую энергию, и теперь достижение более низкой скорости становится возможным с помощью более узких ШИМ.
Тем не менее, перевод в состояние «еле-еле медленно» может оказаться невозможным по той же причине, что и объяснено выше.
Я изо всех сил старался улучшить отклик и добиться максимально медленного ШИМ-управления, сделав несколько модификаций на первой диаграмме, как показано ниже:
Сказав это, двигатель мог бы показать лучшее управление на более медленных уровнях, если бы двигатель прикреплен или обвязан грузом через шестерни или систему шкивов.
Это может произойти из-за того, что нагрузка действует как демпфер и помогает обеспечить контролируемое движение во время регулировки более низкой скорости.
Дизайн № 3: Использование IC 556 для расширенного управления скоростью
Изменение скорости двигателя постоянного тока может показаться не таким сложным, и вы можете найти множество схем для этого.
Однако эти схемы не гарантируют постоянных уровней крутящего момента при более низких скоростях двигателя, что делает их работу весьма неэффективной.
Кроме того, на очень низких скоростях из-за недостаточного крутящего момента двигатель имеет тенденцию останавливаться.
Еще одним серьезным недостатком является то, что в этих схемах нет функции реверсирования двигателя.
Предлагаемая схема полностью лишена вышеуказанных недостатков и способна создавать и поддерживать высокие уровни крутящего момента даже при минимально возможных скоростях.
Работа схемы
Прежде чем обсуждать предложенную схему контроллера двигателя с ШИМ, мы также хотели бы изучить более простую альтернативу, которая не так эффективна. Тем не менее, его можно считать достаточно хорошим, если нагрузка на двигатель невелика, и пока скорость не снижена до минимального уровня.
На рисунке показано, как одну микросхему 556 IC можно использовать для управления скоростью подключенного двигателя, мы не будем вдаваться в подробности, единственным заметным недостатком этой конфигурации является то, что крутящий момент прямо пропорционален скорости двигателя. .
Возвращаясь к предлагаемой конструкции схемы контроллера скорости с высоким крутящим моментом, здесь мы использовали две микросхемы 555 вместо одной или, скорее, одну микросхему 556, которая содержит две микросхемы 555 в одном корпусе.
Принципиальная схема
Основные характеристики
Вкратце, предлагаемый контроллер двигателя постоянного тока включает в себя следующие интересные особенности:
Скорость можно плавно изменять от нуля до максимума без остановки.
На крутящий момент никогда не влияют уровни скорости и он остается постоянным даже при минимальных уровнях скорости.
Вращение двигателя можно изменить или изменить за доли секунды.
Скорость регулируется в обоих направлениях вращения двигателя.
Двум микросхемам 555 назначены две отдельные функции. Одна секция конфигурируется как нестабильный мультивибратор, генерирующий такты прямоугольной волны 100 Гц, которые подаются на предыдущую секцию 555 внутри корпуса.
Вышеупомянутая частота отвечает за определение частоты ШИМ.
Транзистор BC 557 используется в качестве источника постоянного тока, который поддерживает заряженным соседний конденсатор на его плече коллектора.
При этом на вышеуказанном конденсаторе создается пилообразное напряжение, которое сравнивается внутри микросхемы 556 IC с напряжением образца, приложенным извне по показанной схеме контактов.
Напряжение выборки, прикладываемое извне, может быть получено с помощью простой схемы источника питания с переменным напряжением 0–12 В.
Это изменяющееся напряжение, прикладываемое к микросхеме 556 IC, используется для изменения ШИМ импульсов на выходе и, в конечном итоге, используется для регулирования скорости подключенного двигателя.
Переключатель S1 используется для мгновенного изменения направления вращения двигателя, когда это необходимо.
Список деталей
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 Ом,
- R7, R8, R9, R10 = 470 Ом,
- C1 = 0,1 мкФ,
- C2, C3 = 0,01 мкФ,
- C4 = 1 мкФ / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC5476, D7 = BC5476 — 9000 D4 = 1N5408,
- Z1 = 4V7 400 мВт
- IC1 = 556,
- S1 = Тумблер SPDT
Приведенная выше схема была вдохновлена следующей схемой драйвера двигателя, которая была опубликована давно в журнале Elecktor Electronic India.
Управление крутящим моментом двигателя с помощью IC 555
Первую схему управления двигателем можно значительно упростить, используя DPDT-переключатель для реверсирования двигателя и транзистор эмиттерного повторителя для реализации управления скоростью, как показано ниже:
Precision Управление двигателем с помощью одиночного операционного усилителя
Чрезвычайно тонкое или сложное управление постоянным током. Двигатель может быть реализован с использованием операционного усилителя и тахогенератора. Операционный усилитель выполнен в виде переключателя, чувствительного к напряжению.В схеме, показанной ниже, как только выходная мощность тахогенератора становится ниже, чем заданное опорное напряжение, переключающий транзистор включается, и на двигатель подается 100% мощность.
Переключение операционного усилителя произойдет всего за пару милливольт от опорного напряжения. Вам понадобится двойной источник питания, который может быть просто стабилитроном.
Этот контроллер мотора обеспечивает плавную регулировку диапазона без каких-либо механических проблем.
Выходной сигнал операционного усилителя составляет всего +/- 10% от уровня шины питания, таким образом, используя двойной эмиттерный повторитель, можно контролировать огромные скорости двигателя.
Опорное напряжение может быть зафиксировано с помощью термисторов или LDR и т. Д. Экспериментальная установка, указанная на принципиальной схеме, использовала операционный усилитель RCA 3047A и двигатель мощностью 0,25 Вт 6 В в качестве тахогенератора, который генерировал около 4 В при 13000. об / мин для предполагаемой обратной связи.
Дополнительные схемы схем :
ШИМ-управление двигателем с использованием только BJT
Следующая схема также использует принцип ШИМ для желаемого управления скоростью двигателя, однако он не зависит от каких-либо интегральных схем или IC, а использует только обычные BJT. для реализации.Я взял это со страницы старого журнала.
Цепи управления двигателем с использованием LM3524
IC LM3524 — это специализированная схема ШИМ-контроллера, которая позволяет нам конфигурировать очень полезные и точные схемы управления скоростью двигателя, как описано ниже:
На приведенной выше диаграмме показана базовая схема управления ШИМ-двигателем с использованием IC LM3524. Конструкция дополнительно включает управление обратной связью на основе датчика через микросхему LM2907.
К валу двигателя прикреплен небольшой магнит, так что во время вращения магнит проходит вплотную к трансформатору со считывающей катушкой с железным сердечником.Этот механизм заставляет вращающийся магнит индуцировать резкий электрический импульс в считывающей катушке, который используется LM2907 в качестве триггерного входа и соответствующим образом обрабатывается как импульс управления обратной связью для LM3524 IC.
Система обратной связи гарантирует, что заданная скорость никогда не может отклоняться от заданной, обеспечивая точное управление скоростью. Гнездо на штыре № 2 LM3524 используется для управления скоростью двигателя.
Бездатчиковое управление, без обратной ЭДС двигателя
Следующая конструкция ШИМ-управления скоростью LM3525 позволяет осуществлять управление с обратной связью без использования сложного механизма тахометра или громоздких датчиков, реализованных в предыдущей конструкции.
Здесь обратная ЭДС двигателя используется в качестве сигнала обратной связи и подается на вход IC LF198. В случае, если скорость имеет тенденцию к превышению установленного уровня, LF198 сравнивает нарастающий сигнал ЭДС с эталонным сигналом выборки с выхода LM393. Результирующий выходной сигнал отправляется на усилитель ошибки микросхемы LM3524 для необходимой обработки выходного ШИМ на транзисторы драйвера. Контролируемый ШИМ благодаря этой обратной связи без датчика через обратную ЭДС в конечном итоге позволяет двигателю оставаться точно зафиксированным на правильной скорости, которая регулируется потенциометром на контакте №2.
Купить 1,8 — 12В 2A ШИМ-контроллер скорости двигателя постоянного тока онлайн
ШИМ-регулятор скорости двигателя постоянного тока 1,8 В, 3 В, 5 В, 6 В, 12 В-2 А Функция переключателя управления скоростью для двигателей постоянного тока позволяет управлять направлением двигателя постоянного тока с помощью широтно-импульсной модуляции (ШИМ) постоянного напряжения с рабочим циклом. полностью регулируемый от 0% до 100%.
Контроллер скорости двигателя может легко обеспечить постоянный ток 2А для вашего двигателя постоянного тока или другой нагрузки постоянного тока. Этот контроллер скорости двигателя позволяет управлять направлением двигателя постоянного тока с помощью напряжения постоянного тока с широтно-импульсной модуляцией (ШИМ).
С самовосстанавливающимся предохранителем он может автоматически разрывать соединение и автоматически восстанавливать его. Со светодиодным индикатором и поворотным переключателем, удобно использовать.
Инструкция по эксплуатации: 1. Подключите двигатель постоянного тока (или нагрузку постоянного тока) к клеммам двигателя, как показано на схеме подключения.
2. Подключите к цепи напряжение 1,8-15 В постоянного тока, соблюдая полярность подключения. Обратите внимание, что напряжение, приложенное к двигателю, будет напряжением питания, приложенным к цепи.
3. Теперь вы можете контролировать скорость двигателя с помощью потенциометра .
Характеристики:
- Выходной ток: 2А (макс.).
- С самовосстанавливающимся предохранителем.
- Оборудован светодиодным индикатором.
- Потенциометр с функцией переключения для регулировки ШИМ.
В коплект входит:
1 x ШИМ-регулятор скорости двигателя постоянного тока
15 дней гарантииНа этот товар распространяется стандартная гарантия сроком 15 дней с момента доставки только в отношении производственных дефектов.Эта гарантия предоставляется клиентам Robu в отношении любых производственных дефектов. Возмещение или замена производятся в случае производственных дефектов.
Что аннулирует гарантию:
Если продукт подвергся неправильному использованию, вскрытию, статическому разряду, аварии, повреждению водой или огнем, использованию химикатов, пайке или каким-либо изменениям.
PN00110-12C — Бесщеточный (BLDC) регулятор скорости драйвера двигателя 12 В 17A
Технические характеристики:
- Останов при 6000 об / мин
- Режим плавного пуска
- Управление аварийной остановкой
- Аналоговое управление 0-5 В постоянного тока
- Цифровое управление ШИМ (от 7 кГц до 16 кГц)
- Реверсивное управление
- Номинальный при 11-16 В постоянного тока
- Продолжительный режим при 17 А
- Совместимость с источником питания постоянного тока
- Полностью закрытый
Инструкции по подключению:
- Подключите 3-фазные провода (A, B и C) к 3-фазным проводам вашего двигателя BLDC.Если у вас есть сенсорный двигатель BLDC, оставьте провода датчика Холла. Для этого контроллера не требуются датчики Холла.
- Подключите толстый красный провод + 12VDC (IN) к положительной клемме источника питания или аккумулятора.
- Подключите толстый черный провод 0 В (GND) к отрицательной клемме источника питания или аккумулятора.
- Убедитесь, что вы подключаете контроллер с соблюдением правильной полярности. Обратная полярность приведет к повреждению этого контроллера.
Для подключения к горшку (потенциометру) для ручного управления:
- Подключите тонкий черный провод 0 В (GND) к GND вашего горшка.
- Подключите тонкий желтый провод SIGNAL (IN) к выходу вашего горшка.
- Подключите тонкий красный провод 5VDC к + Vcc на горшке.
- Введите тумблер включения / выключения между тонким черным проводом и тонким белым проводом REVERSE. Это позволит вам переключаться между вращением по часовой стрелке и против часовой стрелки.
- Введите тумблер включения / выключения между тонким черным проводом и тонким синим проводом СТОП. Это позволит вам переключаться между функциями остановки и запуска.
- Введите тумблер включения / выключения между тонким черным проводом и тонким зеленым проводом МЯГКИЙ ПУСК.Это позволит вам включить / отключить функцию плавного запуска. Время разгона плавного пуска составляет около 3 секунд.
Для подключения к микроконтроллеру:
- Логическое напряжение должно быть 5 В постоянного тока.
- ШИМ должен выводить как минимум на частоте 7 кГц. Максимальная частота 16 кГц. Подключите сигнал PWM к тонкому желтому проводу SIGNAL (IN).
- Переключение сигналов между низким (0 В постоянного тока) и высоким (5 В постоянного тока) на тонкий белый провод REVERSE для вращения по часовой стрелке и против часовой стрелки.
- Переключение сигналов между низким (0 В постоянного тока) и высоким (5 В постоянного тока) тонким синим проводом STOP для функций останова (низкий уровень) и работы (высокий уровень).
- Переключайте сигналы между низким (0 В постоянного тока) и высоким (5 В постоянного тока) тонким зеленым проводом SOFT START для включения (низкий) и отключения (высокий) его функции. Время разгона плавного пуска составляет около 3 секунд.
Для работы в качестве односкоростного двигателя:
- Подключите тонкий красный провод к тонкому желтому проводу.
- Подключите тонкий зеленый провод к тонкому черному проводу, чтобы включить функцию плавного пуска (рекомендуется).
- Введите тумблер включения / выключения между тонким черным проводом и тонким белым проводом REVERSE. Это позволит вам переключаться между вращением по часовой стрелке и против часовой стрелки.
Что мне делать: 12 В или 24 В? — 4QD
Какое напряжение мне следует использовать — 12 В, 24 В, 36 В или 48 В?
Нас часто спрашивают, что лучше всего — 12 В или 24 В для системы двигателя с батарейным питанием [короткий ответ — 24 В], а также, если мы делаем контроллер двигателя на 12 В.
Давайте выразим это в терминах автомобиля на минуту: если вы хотите ускориться или иметь более высокую максимальную скорость, вам нужно больше лошадиных сил.В электромобиле энергия обычно поступает от аккумулятора и преобразуется двигателем в энергию. Электрическая мощность — это вольты, умноженные на амперы, так что 40 ампер от 12-вольтовой батареи равны 480 ваттам. Но 480 Вт может также поступать от батареи 24 В при токе всего 20 ампер; Таким образом, для любой конкретной мощности, чем выше напряжение, тем ниже будет ток.
Теперь электрический ток вызывает нагрев. Двигатель, проводка и контроллер нагреваются, что приводит к потере энергии. Потери тепла пропорционально квадрату тока, умноженному на сопротивление.При прочих равных, это приведет к тому, что потери на 24 В будут вдвое меньше, чем на 12 В. Итак, система 24 В всегда лучше, чем система 12 В — при условии, что вы можете физически установить две батареи. К тому же 36 или 48 В были бы даже лучше [здесь есть страница об использовании наших контроллеров на 48 В и выше].
В действительно мощных системах (молочные поплавки, электромобили, вилочные погрузчики) часто используется 72 В или даже 96 В для уменьшения нагрева.
Количество энергии в батареях составляет амперы x часы x вольт.Рассмотрим аккумулятор на 12 В на 60 ампер-час. Ясно, что это точно так же, как две параллельные батареи меньшего размера 12 В 30 Ач. Но общее количество энергии в этих двух не изменится, подключим мы их параллельно или последовательно. Таким образом, батарея 12 В 60 Ач может хранить точно такую же энергию, как батарея 24 В 30 Ач.
Есть еще один фактор, препятствующий работе с напряжением 12 В, полевым МОП-транзисторам необходимо хорошее напряжение для их полного включения, поэтому в большинстве контроллеров 4QD используется внутренняя шина питания 9 В, которой достаточно для обеспечения правильного включения.Однако между 9В и 12В нет большой разницы. От батареи не требуется много тока, прежде чем она упадет на 2 В на ее выводах. Небольшое крепление для дополнительных входов и проводки — и питание 9В падает. После этого доступный ток с контроллера довольно быстро падает! Помните, что ток батареи на самом деле является прерванной версией тока двигателя, поэтому индуктивность и сопротивление батарей и проводки батареи вносят свой вклад в любое падение напряжения.
Двигатели 12 В на 24 В
Номинальный ток двигателя
Двигатели предназначены для работы на заявленных оборотах в минуту при определенном приложенном напряжении с указанной нагрузкой — той, при которой двигатель принимает максимальный продолжительный ток.
Если вы запустите двигатель с меньшей нагрузкой, чем указано на паспортной табличке, то потребление тока уменьшится, а скорость немного увеличится.
Если вы увеличите нагрузку, то потребление тока двигателем увеличится, а его скорость снизится. Очевидно, вы сейчас превышаете номинальную мощность двигателя в непрерывном режиме, поэтому он начнет нагреваться сильнее, чем должен. Чем больше перегрузка, тем быстрее нагревается двигатель, поэтому существует ограничение по времени для такой перегрузки. Однако обычно безопасно запускать двигатель с перегрузкой по току на 300% -400%, возможно, в течение минуты — хотя это будет варьироваться от двигателя к двигателю.
Напряжение двигателя
Если вы запустите двигатель 12 В от 24 В, его ток потребления и скорость все равно будут зависеть от механической нагрузки. Однако без нагрузки он теперь будет работать с удвоенной скоростью, с которой он работал с напряжением 12 В. Нагрев в двигателе по-прежнему связан с током, поэтому вы все равно можете работать с его полной номинальной механической нагрузкой / током. Однако, если двигатель плохо сбалансирован, вы можете ожидать шума и вибрации, поскольку общая конструкция может быть неадекватной для более высокой скорости.Также может возникнуть проблема с износом щеток, поскольку щеткам предлагается переключать ток в два раза быстрее. Эти эффекты, однако, маловероятны, и обычно увеличение скорости вполне нормальное.
Здесь есть одна оговорка. Двигатель представляет собой индуктивное устройство, а коммутатор и щетки — механический переключатель. Такая механическая система переключения будет иметь ограничение на максимальную скорость, с которой она может работать, и если она будет достигнута, коммутация выйдет из строя. Я не хотел бы говорить о точных пределах, но один эффект — это шум, а чрезмерный шум может иногда вызывать сбой контроллера.Эффект случается довольно редко, но будьте осторожны при чрезмерном повышении частоты вращения.
Пределы скорости двигателя
Пределы скорости двигателя — это не просто качество подшипника. Если вы раскрутите мотор достаточно сильно — центробежная сила возьмет верх, и ротор разлетится на части. Также важна конструкция щетки и коммутатора. В зависимости от конструкции они будут иметь максимальную частоту переключения, и работа выше этой скорости вызовет сильное искрение щетки. В крайних случаях это вызовет сильные переходные помехи, которые могут вывести контроллер из строя.Это маловероятно: мы когда-либо видели, как это делал только один клиент: он использовал двигатели 12 В на 36 В и взорвал два контроллера! Производитель контроллера не может комментировать эти ограничения двигателя: вам необходимо проконсультироваться с производителем двигателя.
Если вы перегружаете двигатель, его ток возрастает одинаково, независимо от того, работает ли двигатель от 12 В или 24 В. Однако при остановке ток от 24 В может быть вдвое больше, чем от 12 В, поэтому двигатель может нагреваться в четыре раза (нагрев пропорционален квадрату тока).Однако этого не произойдет, если вы используете хороший контроллер, так как контроллер будет ограничивать ток до его расчетного значения. Кроме того, контроллер изменяет напряжение на двигателе, поэтому вы, вероятно, ни в коем случае не собираетесь использовать двигатель при полном напряжении.
Еще одно соображение заключается в том, что если вы пропустите слишком большой ток через двигатель с постоянными магнитами, можно немного размагнитить магниты. Это кумулятивно: мощность двигателя будет немного снижаться каждый раз, когда вы это делаете. Однако для аккумуляторных двигателей, вероятно, достаточно безопасно предположить, что при номинальном напряжении ток, потребляемый при остановке двигателя, не достигнет этого уровня размагничивания.Если бы вы запустили двигатель 12 В от батареи 24 В, ток остановки мог бы быть чрезмерным, если бы он не был ограничен контроллером.
Следовательно, при условии, что вы выбрали контроллер, подходящий для используемого двигателя, вы обычно можете запустить двигатель 12 В от батареи 24 В без каких-либо последствий, за исключением того, что полная скорость увеличивается вдвое.
Системы 12 В
Работа при высоком токе от 12 В может вызвать несколько проблем, поэтому 4QD не рекомендуют это напряжение. Однако наши модели Porter, DNO, SST и Pro-160 могут работать от 12 В.Если вам нужен сильноточный контроллер 12 В, обратите внимание на наш новый Pro-360.
Напряжение затвора полевого МОП-транзистора
Обычным полевым МОП-транзисторам для правильного включения требуется около 7 или 8 вольт на затворе. Из-за этого большинство контроллеров 4QD имеют внутреннее питание 9 В, что дает почти 8 В на затворе MOSFET.
Теперь, если вы посмотрите напряжение на клеммах 12-вольтовой батареи с помощью осциллографа, вы обнаружите, что, когда контроллер потребляет прерывистый ток от батареи, отображается прямоугольная волна с амплитудой 2 вольта.Батарея может иметь разомкнутую цепь 13 В, но во время периодов ШИМ, когда фактически потребляется ток, эффективное напряжение фактически падает до 11 В. Если вы хотите узнать больше о причинах прерывания тока, см. Наш архив схем.
Учтите также, что батарея на 12 В может, когда она разряжена на 80% (реалистичный уровень до подзарядки), имеет напряжение на клеммах (разомкнутая цепь) около 10,8 В. Таким образом, ШИМ будет работать при эффективном напряжении 8,8 В. Таким образом, внутренняя шина 9 В контроллера не может оставаться на уровне 9 В! И это прежде, чем мы начнем рассматривать падения напряжения в проводке батареи из-за ее сопротивления и индуктивности.
Таким образом, довольно сложно полностью использовать батарею 12 В при высоких токах и получить полный номинальный ток от контроллера, так как шина 9 В упадет, а вместе с ней и доступный ток.
[Обратите внимание, что у новых Pro-160/360 гораздо более современный дизайн внутреннего источника питания, который позволяет обойти эту проблему].
Ток остановки двигателя
Рассмотрим ток остановки двигателя, например, двигателя Sinclair C5. На только что заряженном аккумуляторе ток холостого хода может составлять 120 ампер.Это ограничено сопротивлением двигателя, сопротивлением питающих его проводов, а также внутренним сопротивлением батареи. Добавление чего-либо еще в эту петлю увеличит ее сопротивление. Итак, если у вас есть система, которая прекрасно работает без регулятора скорости двигателя, добавление регулятора скорости двигателя неизбежно снизит ее пиковую производительность. Многие системы на 12 В просто не предназначены для работы с регулятором скорости, и его добавление значительно снизит производительность.
Системы 24 В
Накладные расходы в системе 24 В далеко не так критичны.Падение на 2 В, даже на 4 В, по-прежнему не приведет к подаче питания от батареи к шине 9 В. Сопротивление двигателя также выше, поэтому дополнительный эффект контроллера и проводки менее заметен.
Лучшие и решающие методы контроля
В период 18 -го и -го века произошла эволюция двигателей постоянного тока. Развитие двигателей постоянного тока значительно расширилось, и они находят широкое применение во многих отраслях промышленности. В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом.Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает от постоянного тока, преобразуя полученную электрическую энергию в механическую. Это вызывает изменение вращения в самом устройстве, обеспечивая, таким образом, мощность для работы различных приложений в нескольких областях.
Регулировка скорости двигателя постоянного тока — одна из наиболее полезных функций двигателя. Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм управления скоростью применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещается в магнитное поле, на него действует механическая сила.В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком, создаваемым обмотками возбуждения в одном направлении, либо нейтрализует магнитный поток, обусловленный обмотками возбуждения. Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС. Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования своего крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Почему важно регулировать скорость двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы.Во время сверления каждый материал имеет свою собственную скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии насосных установок будет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Управление скоростью двигателя постоянного тока выполняется вручную рабочим или с помощью любого автоматического средства управления.Похоже, что это контрастирует с ограничением скорости, когда должно быть регулирование скорости, противодействующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — скорость двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
т.е. N = (PZ / 60A) (V — IaRa) / ø
. записывается как:
N = K (V — IaRa) / ø, K — постоянная величина
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения якоря.
- Скорость двигателя обратно пропорциональна потоку из-за результатов поля
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и изменяя ток через обмотку возбуждения
- Изменяя напряжение якоря и изменяя сопротивление якоря
Различные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как серийных, так и параллельных двигателей постоянного тока.
Управление скоростью двигателя постоянного тока в серии типов
Его можно разделить на два типа, а именно:
- Техника с управлением якорем
- Техника с полевым управлением
Техника с управлением якорем далее подразделяется на три типа
- Якорь управляемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Управляемое сопротивление якоря
Этот метод наиболее широко используется там, где регулирующее сопротивление последовательно соединено с сопротивлением двигателя.Изображение ниже объясняет это.
Контроль сопротивления якоряПотери мощности, которые происходят в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, потому что этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.
Метод управления скоростью двигателя постоянного тока с шунтированным якоремНапряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута за счет подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника с полевым управлением далее подразделяется на два типа:
- Полевой дивертер
- Управление полем с отводом (управление полем с отводом)
Техника полевого дивертера
В этом методе используется дивертер. Скорость потока, проходящего через поле, можно уменьшить, шунтируя некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Регулировка скорости двигателя постоянного тока с дивертером поляУправление отводным полем
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, и это достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток. Здесь убирается количество ответвлений в обмотке возбуждения, и этот прием используется в электрических тягах.
Управление скоростью параллельного двигателя постоянного тока
Его можно разделить на два типа:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный Поток, создаваемый обмотками возбуждения, изменяется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока
С помощью этого метода можно управлять скоростью двигателя постоянного тока, управляя сопротивлением якоря для управления падением напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре уменьшается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для шунтирующего двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — это главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем и может быть синхронным или асинхронным.Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, поэтому уровень напряжения якоря изменяется от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и потоку поля до достижения номинальной скорости. И поскольку мощность является произведением скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь, в функциональности, ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение.
Один из таких методов управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда). .
Преимущества и недостатки Ward Leonard Metho d:
Преимущества использования метода Ward Leonard для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавно для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с интенсивным возбуждением действует как привод, поэтому коэффициент мощности будет увеличиваться на
- Когда есть мигающая нагрузка, приводным двигателем является асинхронный двигатель с маховиком, который используется для уменьшения мигающей нагрузки до минимального уровня
Недостатки метода Уорда Леонарда: комплект двигателя и генератора, стоимость больше
И применение метода Уорда Леонарда плавное регулирование скорости в двигателе постоянного тока.Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым является управление скоростью двигателя постоянного тока с использованием ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжениемНа приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя.