Регулятор оборотов электродвигателя: назначение, принцип работы, подключение
В большинстве современных бытовых и промышленных приборов применяются электрические машины, совершающие какую-либо полезную работу. В качестве рабочего инструмента в них могут выступать самые разнообразные приспособления, которые необходимо вращать с различной скоростью. Для изменения этого параметра используется регулятор оборотов электродвигателя.
Назначение
Технически регулятор оборотов электродвигателя предназначен для изменения количества вращения вала за единицу времени. На этапе разгона корректировка частоты обеспечивает более плавную процедуру, меньшие токи и т.д. В некоторых технологических процессах необходимо регулятор оборотов снижает скорость движения оборудования, изменение подачи или нагнетания сырья и т.д.
Однако на практике данная опция может преследовать и другие цели:
- Экономия затрат электроэнергии – позволяет снизить потери в моменты пуска и остановки вращений мотора, переключения скоростей или регулировки тяговых характеристик.

- Контроль температурного режима, величины давления без установки обратной связи с рабочим элементом или с таковой в асинхронных электродвигателях.
- Плавный пуск – предотвращает бросок тока в момент включения, особенно актуально для асинхронных моторов с большой нагрузкой на валу. Приводит к существенному сокращению токовых нагрузок на сеть и исключает ложные срабатывания защитной аппаратуры.
- Поддержание оборотов трехфазных электродвигателей на требуемой отметке. Актуально для точных технологических операций, где из-за колебаний питающего напряжения может нарушиться качество производства или на валу возникает разное усилие.
- Регулировка скорости оборотов электродвигателя от 0 до максимума или от другой базовой скорости.
- Обеспечения достаточного момента на низких частотах вращения электрической машины.
Возможность реализации тех или иных функций у регуляторов оборотов определяет как принцип их действия, так и схематическое исполнение.
Принцип работы
Для регулировки оборотов может использоваться способ понижения или повышения напряжения, изменение силы тока и частоты, подаваемых в обмотки асинхронных и коллекторных электродвигателей. Поэтому далее рассмотрим варианты частотных преобразователей и регуляторов напряжения.
Среди используемых в промышленной и бытовой сфере следует выделить:
- Введение рабочего сопротивления – реализуется при помощи переменных резисторов, делителей и прочих преобразователей. Хорошо обеспечивает снижение в однофазных двигателях за счет контроля скольжения (разницы между магнитным полем статора и скоростью вращения асинхронных агрегатов). Для этого устанавливаются электродвигатели большей мощности, чтобы на них можно было подавать меньшее напряжение. Соотношение по скорости оборотов будет составлять до 2 раз в сторону уменьшения.
- Автотрансформаторный – выполняется путем перемещения подвижного контакта по обмотке, что снижает или увеличивает скорость вращения электродвигателя.
 Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности.
Преимущество такого принципа заключается в четкой синусоиде переменного тока и большой перегрузочной способности. - Тиристорный или симисторный – изменяет величину питающего напряжения посредством пары встречно включенных тиристоров или совместного включения с симистором. Этот способ применим не только в асинхронных двигателях, но и других бытовых приборах – диммерах, переключателях и т.д.
- Транзисторный – позволяет изменять форму подаваемого напряжения за счет преобразования числа импульсов и временной паузы между подаваемым напряжением. Благодаря чему получил название широтно-импульсной модуляции, пример такого регулятора приведена на схеме ниже.

Здесь питание однофазного асинхронного двигателя производится от линии 220В через выпрямительный блок VD1-4, далее напряжение поступает на эмиттер и коллектор транзисторов VT1 и VT2. Подавая управляющий сигнал на базы этих транзисторов, и регулируют обороты мотора.
- Частотный – преобразует частоту подаваемого напряжения на обмотки однофазного или трехфазного асинхронного электродвигателя. Это наиболее современный способ, ранее он относился к дорогостоящим, но с появлением дешевых высоковольтных полупроводников и микроконтроллеров перешел в разряд наиболее эффективных. Может реализовываться с помощью транзисторов, микросхем или микроконтроллеров, способных уменьшать или увеличивать частоту ШИМ.
- Полюсный – позволяет регулировать частоту вращения электродвигателя при переключении количества катушек в фазных обмотках, в результате чего изменяется направление и величина тока, протекающего в каждой из них.
 Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Реализуется как за счет намотки нескольких катушек для каждой из фаз, так и одновременным последовательным или параллельным соединением катушек, такой принцип приведен на рисунке ниже.
Как выбрать?
Конкретная модель регулятора оборотов должна подбираться в соответствии с типом подключаемой электрической машины – коллекторный двигатель, трехфазный или однофазный электродвигатель. В соответствии с чем и подбирается определенный преобразователь частоты вращения.
Помимо этого для регулятора оборотов необходимо выбрать:
- Тип управления – выделяют два способа: скалярный и векторный. Первый из них привязывается к нагрузке на валу и является более простым, но менее надежным. Второй отстраивается по обратной связи от величины магнитного потока и выступает полной противоположностью первого.
- Мощность – должна выбираться не менее или даже больше, чем номинал подключаемого электродвигателя на максимальных оборотах, желательно обеспечивать запас, особенно для электронных регуляторов.

- Номинальное напряжение – выбирается в соответствии с величиной разности потенциалов для обмоток асинхронного или коллекторного электродвигателя. Если вы подключаете к заводскому или самодельному регулятору одну электрическую машину, будет достаточно именно такого номинала, если их несколько, частотный регулятор должен иметь широкий диапазон по напряжению.
- Диапазон частот вращения – подбирается в соответствии с конкретным типом оборудования. К примеру, для вращения вентилятора достаточно от 500 до 1000 об/мин, а вот станку может потребоваться до 3000 об/мин.
- Габаритные размеры и вес – выбирайте таким образом, чтобы они соответствовали конструкции оборудования, не мешали работе электродвигателя. Если под регулятор оборотов будет использоваться соответствующая ниша или разъем, то размеры подбираются в соответствии с величиной свободного пространства.
Подключение
Способ подключения регулятора оборотов электродвигателя будет отличаться в зависимости от его типа и принципа действия. Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Поэтому в качестве примера мы разберем один из наиболее распространенных частотных регуляторов, которые используются в самых различных сферах.
Перед подключением обязательно ознакомьтесь с заводской схемой. Как правило, вы можете увидеть ее на самом регуляторе оборотов, либо в паспорте устройства:
Схема подключения регулятораДалее, пользуясь распиновкой, можно определить количество выводов, которые будут использоваться для подключения регулятора электродвигателя к сети. В нашем примере, рассмотрим случай, когда применяется трехпроводная система, значит, понадобится фаза, ноль и земля. На задней панели регулятора это два вывода AC и FG:
Затем необходимо проверить цветовую маркировку разъема с приведенной схемой и сопоставить ее со всеми элементами электродвигателя, которые будут подключаться в вашем случае. Если какие-то выводы окажутся лишними, их можно закоротить, как показано на рисунке выше.
Проверьте цветовую маркировкуЕсли все выводы регулятора соответствуют клеммам электродвигателя, можете подсоединять их друг к другу и к сети.
Частотный регулятор для асинхронного двигателя 220в
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.

- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.

При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно).
Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.

- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
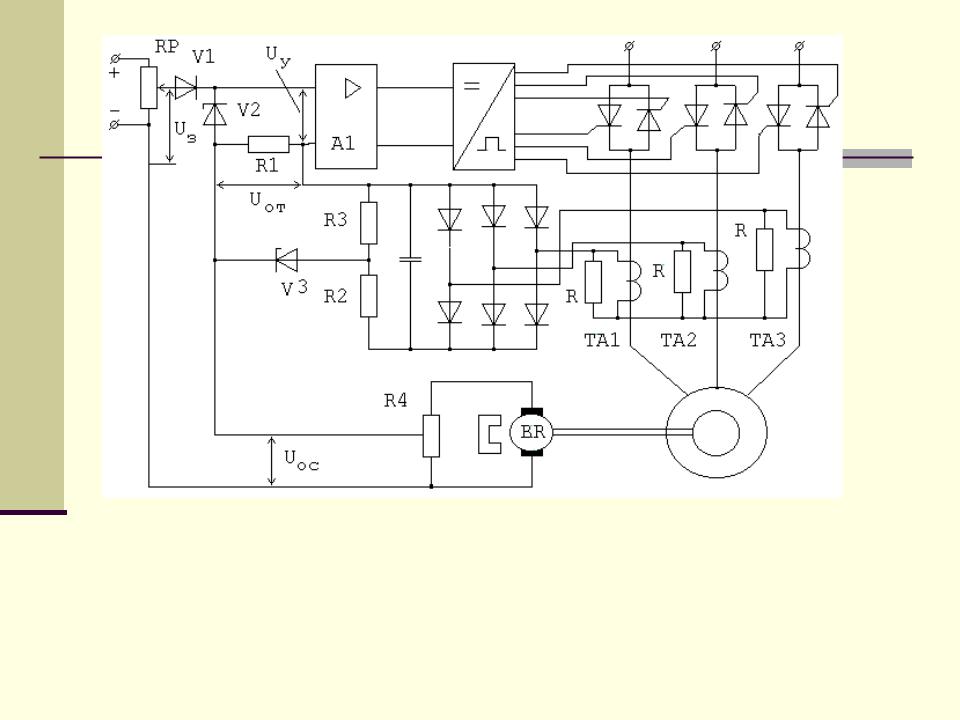
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
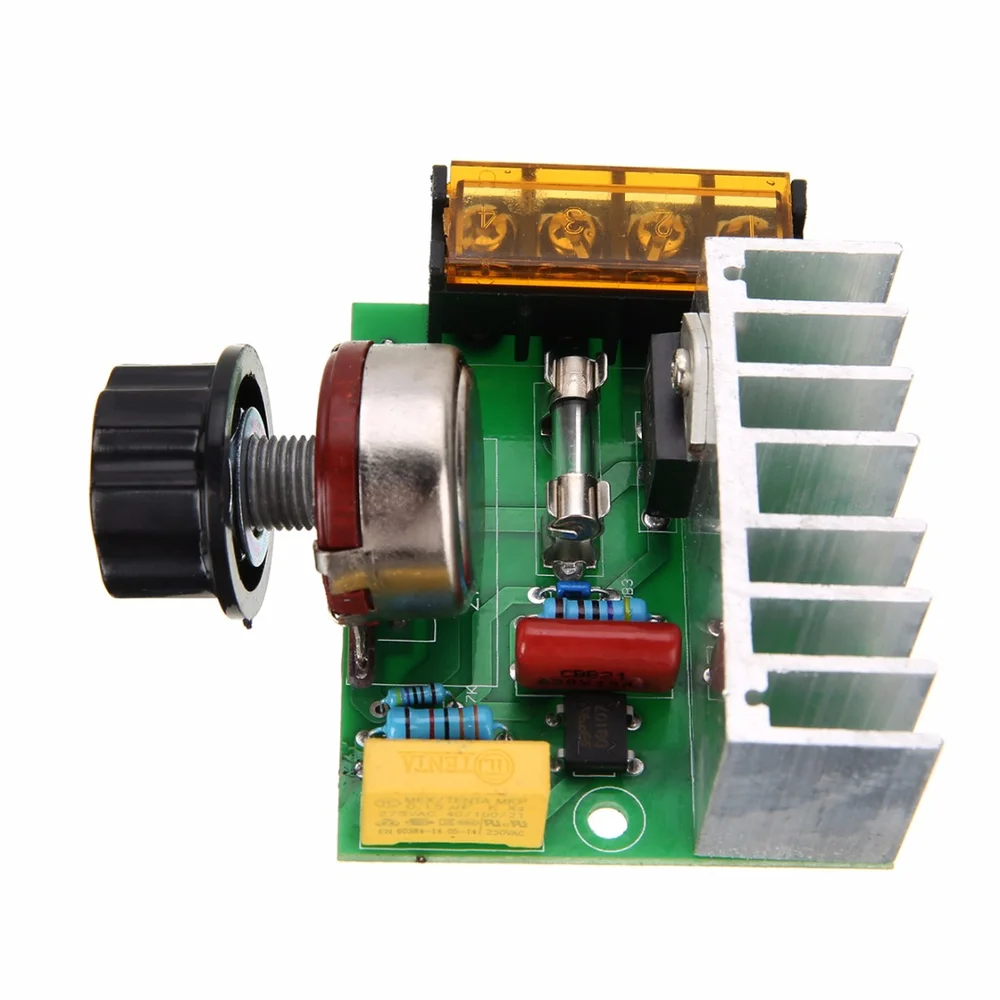
Фото – мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
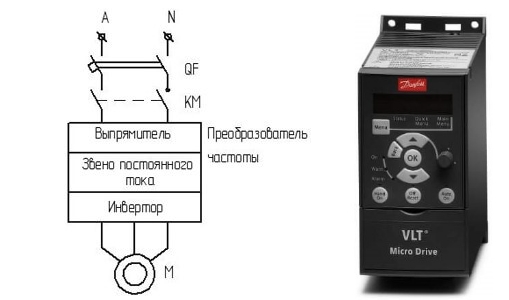
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления.
 Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).

Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
Частотное управление электроприводами активно развивается и все чаще можно услышать о новом методе управления, или улучшенном частотнике, или о внедрении частотного электропривода в какой-то сфере, где ранее никто и подумать не мог что это возможно. Но это факт!
Но это факт!
Если мы внимательно рассмотрим электродвигатели, к которым применяют частотное регулирование – то это асинхронные или синхронные трехфазные двигатели. Существует несколько разновидностей преобразователей частоты. Но ведь есть и однофазные асинхронные машины, почему прогресс не касается их? Почему частотное управление не применяют так активно к однофазным машинам? Давайте рассмотрим.
Содержание:
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Основные виды однофазных электроприводов
Как упоминалось однофазный двигатель не может развивать пусковой момент, следствием чего становится невозможность его самостоятельного запуска. Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Для этого придумали несколько способов компенсации магнитного поля противоположного по знаку основному.
Двигатели с пусковой обмоткой
В данном способе пуска кроме основной обмотки Р, имеющей фазную зону 120 0 , на статор наматывают еще и пусковую П, которая имеет фазную зону 60 0 . Также пусковая обмотка сдвигается относительно рабочей на 90 0 электрических. Для того, чтоб создать фазовый сдвиг между токами обмоток Iр и Iп последовательно в пусковую обмотку подключают элемент, приводящий к сдвигу фаз ψ (фазосдвигающее сопротивление Zп):
Где: а) схема подключения машины, б) векторные диаграммы при использовании различных сопротивлений.
Наилучшими условиями для пуска будет включения конденсатора в пусковую обмотку. Но поскольку емкость конденсатора довольно велика, соответственно и его стоимость и габариты тоже возрастают. Зачастую его применяют для получения повышенного момента для пуска. Пуск с помощью индуктивности имеет наихудшие показатели и в настоящее время не используется. Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Довольно часто могут применять запуск с помощью активного сопротивления, при этом пусковую обмотку делают с повышенным активным сопротивлением. После запуска электродвигателя пусковая обмотка отключается. Ниже показаны схемы включений и их пусковые характеристики:
Где: а,б) двигатели с пусковой обмоткой, в,г) конденсаторные
Конденсаторный двигатель
Данный тип электродвигателя имеет две рабочие обмотки, в одну из которых подключают рабочую емкость Ср. Данные обмотки сдвинуты относительно друг друга на 90 0 электрических и имеют фазные зоны тоже 90 0 . При этом мощности обеих обмоток равны, но их токи и напряжения различны, также различны количества витков. Иногда величины конденсатора рабочего не достаточно для формирования нужного пускового момента, поэтому параллельно ему могут вешать пусковой, как это показано на рисунке выше. Схема приведена ниже:
Где: а) схема конденсаторного электродвигателя, б) его векторная диаграмма
В данном типе однофазных машин коэффициент мощности cosφ даже выше чем у трехфазных. Это объясняется наличием конденсатора. КПД такого электродвигателя выше, чем однофазного электродвигателя с пусковой обмоткой.
Частотное регулирование однофазных асинхронных электродвигателей
Итак, все чаще появляются предложения частотных преобразователей, которые могут управлять однофазными асинхронными машинами. В силу того что частотники предназначены для работы с трехфазными машинами, то для регулирования оборотов однофазной машинами необходим особый вид частотного преобразователя. Это обусловлено тем, что трехфазные и однофазные машины имеют немного разный принцип работы. Давайте рассмотрим схему включения, которую предоставляет один из официальных производителей частотных преобразователей для однофазных машин:
Это схема прямого подключения. Где: Ф-фаза питающего напряжения, N-нейтральный проводник, L1, L2 – обмотки двигателя, Ср – рабочий конденсатор.
А вот схема подключения преобразователя:
Как мы можем видеть, конденсатор при включении данной схемы отключается. Обмотка L1 переключается к выходу преобразователя фазы А, а L2 к В. Общий провод подключается к выходу С. Тем самым мы фактически получили двухфазную машину. Фазовый сдвиг теперь будет реализовывать частотный преобразователь, а не конденсатор. На выходе преобразователя будет обычное трехфазное напряжение.
Данный способ частотного регулирования трудно назвать однофазным, так как при питания двигателя от сети напрямую необходимо опять восстанавливать схему с конденсатором. Более того, этот способ регулирования частоты НЕ ПОДХОДИТ для машин с пусковой обмоткой, так как сопротивление рабочей и пусковой обмотки не равны, появится асимметрия.
Можем сделать вывод, что данный вид частотного регулирования подходит не всем электродвигателям, а только конденсаторным. Более того, при такой схеме подключения необходимо провести переподключение обмоток внутри электродвигателя (в коробке выводов электродвигателя), что после переподключения не позволит работать ему от сети напрямую. Поэтому если вы собираетесь питать электродвигатель от однофазной сети через частотник, то, может быть стоит купить преобразователь, который питается от однофазной сети, а двигатель обычный, трехфазный. Это лучше с точки зрения работы самой машины, также отсутствуют переделки внутри электрической машины. Если вы собираетесь таким образом модернизировать систему, то внимательно изучите характеристики электродвигателя, преобразователя, чтоб избежать пустой траты средств или выхода из строя элементов системы.
“>
Регулирование скорости асинхронного двигателя
Вопрос, связанный с регуляцией скорости вращения электрического низковольтного двигателя , становится все более актуальным. Дело в том, что сокращение или увеличение числа оборотов, совершаемых оборудованием, важно для стабильной работы различных приборов, в частности, для механизмов, которые применяются для облегчения бытовых работ. На первый взгляд может показаться, что проще всего будет решить проблему за счет снижения напряжения, питающего двигатель. Однако, данный вариант подходит только для моделей постоянного тока. В них регуляторы напряжения отличаются лаконичностью конструкции.
Для регулирования скорости вращений существует более современный способ. Он предполагает применения частотных инвенторных преобразователей, которые в обиходе все чаще называются частотниками. Они нередко используются в различных сферах. Например, их часто применяют для оборудования станков и электрических приводов, входящих в состав промышленного оборудования.
Принцип функционирования частотника довольно прост. Его суть заключается в правиле определения вытяжной угловой скорости вращения вала. При этом важно учитывать такой немаловажный фактор, как частота сети, обеспечивающей питание. За счет изменения частоты питания появляется возможность регуляции скорости вращения ротора. Каждый частотный преобразователь снабжается специальной табличкой. На ней указываются основные характеристики.
Каждый частотный преобразователь снабжается специальной табличкой. На ней указываются основные характеристики.
Частотный регулятор скорости. Принцип действия регулятора.
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная.
Регуляторы скорости асинхронных двигателей
Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя. Для регулирования оборотов применяют приборы специального типа, частотные схемы вращения двигателя. Такие моторы применяются не только в устройствах вытяжки, но и в быту дома.
Недавно регуляторы скорости вращения электродвигателей асинхронного типа имели в своем составе реле и простые разъединители, которыми производили запуск наибольших оборотах, останавливали привод мотора.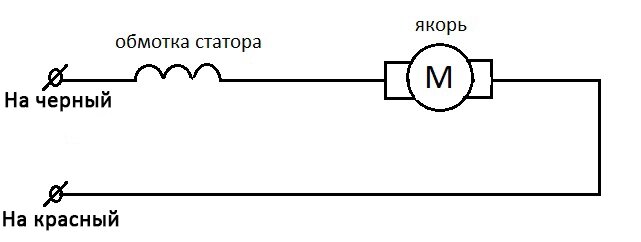
Все регуляторы скорости, как и частотные, служат для того, чтобы менять обороты двигателя. Главная опция регулятора – это изменение мощности системы вытяжки, различного оборудования. Кроме этого, частотные регуляторы имеют и другие функции:
- снижение износа механизма в работе;
- малый расход электроэнергии;
- низкая шумность на большой скорости.
Многие приборы, которые имеют свойство изменения оборотов, применяются как единичные приборы, так и дополнительными блоками для управления приборами в быту с электрическими двигателями.
Способы изменения скорости
Для многих видов двигателей применяют такие варианты регулировки скорости:
- регулирование напряжения питания;
- схемы подключения обмоток моторов с несколькими скоростями;
- частотный метод изменения токовых значений;
- применение коммутатора электронного типа.
Регулятор напряжения позволяет применять простые устройства для мягкой регулировки ступенчатого типа скорости. Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Виды и типы скоростных регуляторов
- применение тиристоров;
- схема с использованием симисторов;
- частотные инверторы;
- трансформаторные типы.
Регуляторы на тиристорах применяются для 1-фазных моторов, кроме изменения скорости, производят защиту механизмов от скачков напряжения и нагрева.
Симисторные регуляторы управляют многими моторами одновременно, если значение мощности не больше максимального. Это самый распространенный способ.
3-фазный регулятор точнее, имеет предохранитель тока, фильтр сглаживания шума на основе конденсатора.
Регулятор частотный для мотора асинхронного типа применяется при изменении напряжения входа в интервале 0-480 вольт, контроль скорости производится изменением электроэнергии. Он применяется в 3-фазных моторах, кондиционерах, вентиляторах с большой мощностью.
Для мощных двигателей применяют регулятор из трансформатора с тремя или с одной фазой. Этим устройством можно регулировать скорость мотора ступенями. Один трансформатор работает со многими моторами в одно время автоматически.
В эксплуатации электромотора кроме шума появляются помехи от электромагнитных волн, которые устраняются кабелем с экраном. Если применять 3-фазный регулятор скорости, то шума не бывает. Нужна установка фильтров сглаживания.
Для применения частотных регуляторов специалисты рекомендуют:
- контролировать соединения проводов и заземления;
- фильтр от помех;
- размещение регулятора в защищенном от солнца месте;
- вертикальное расположение регулятора для лучшего рассеивания тепла;
- не использовать частое выключение и включение для долгого времени службы.
Частотный регулятор скорости РМТ
Эти частотные регуляторы служат для регулировки скорости вращения электродвигателя вентилятора короткозамкнутого асинхронного типа, на 380 вольт. Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Принцип действия преобразователя частоты, или инвертора заключается в следующем. Напряжение питания переменного тока проходит через выпрямитель на диодах, фильтр батареи емкостей значительного размера для уменьшения пульсаций потенциала, получаемого двигателем. Далее, питающее напряжение поступает на сборку из 6-ти транзисторов (биполярных управляемых) с затвором, изолированным от прохождения тока с диодами.
Диоды защищают транзисторы от пробивания потенциала обратной полярности, которое образуется при действии с обмотками мотора. При закрывании и открывании перекрестных транзисторных пар образуются 3 смещенные на 120 градусов графика синуса управляемости обмоток мотора с частотой 25-50 герц.
Подключение регулятора производится зажимами с площадью сечения 6 мм2. Затягивать необходимо усилием 1,2 Н*м для основных контактов, 0,3 Н*м для управляющих контактов.
| Принцип действия трехфазного асинхронного двигателя |
| Пуск звезда-треугольник трехфазного электродвигателя | |||||
| |||||
 Рассмотрим эту схему подробнее.
Рассмотрим эту схему подробнее.
| РЕГУЛИРОВКА ОБОРОТОВ ЭЛЕКТРОДВИГАТЕЛЕЙ | |||||
| |||||
| Регулятор оборотов электродрели своими руками | |||||
| |||||
 Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
| Ремонт и проверка работоспособности коллекторных электродвигателей стиральных машин. | |||||
| |||||
 Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
| Как должна происходить разборка электродвигателя | |||||
| |||||
 Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
| Системы плавного пуска высоковольтных электродвигателей на основе устройств серии УППВЭ | |||||
| |||||
| Электрическая схема пуска трехфазного электродвигателя | |||||
| |||||
 На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
| Устройство асинхронного электродвигателя | |||||
| |||||
| ЭЛЕКТРОДВИГАТЕЛЬ БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ДБМ254-120-57 |
| ШИМ-регуляторы оборотов маломощных коллекторных электродвигателей | |||||
| |||||
 Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Регулировка оборотов асинхронного двигателя своими руками
Насколько я знаю, для регулировки оборотов асинхронного двигателя нужно менять частоту тока. Вот скопировал с одного сайта
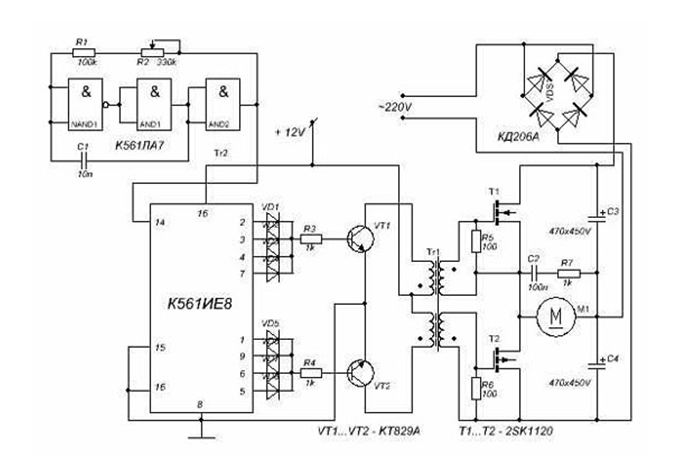
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц. Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Добавлено (26.08.2013, 19:50)
———————————————
Он там регулирует от 50гц до 200гц. Но думаю, если изменить емкость С1 можно добиться частоты пониже. Тем самым и уменьшить обороты.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Зачем нужен регулятор оборотов асинхронного электродвигателя:
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.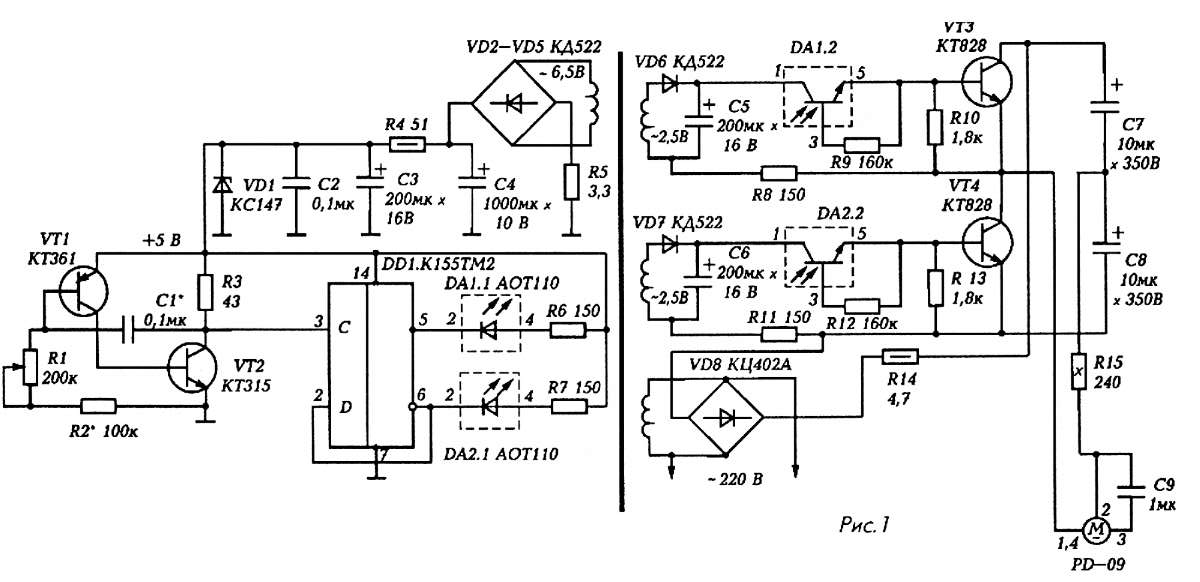
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.
Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.

- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.

Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.
Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры.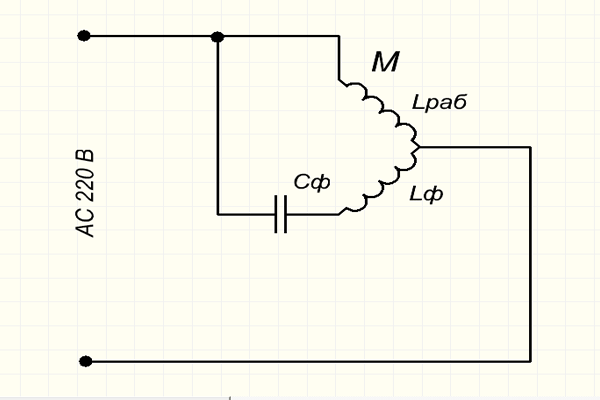 Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Самостоятельное изготовление регулятора оборотов электродвигателя
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.

- Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.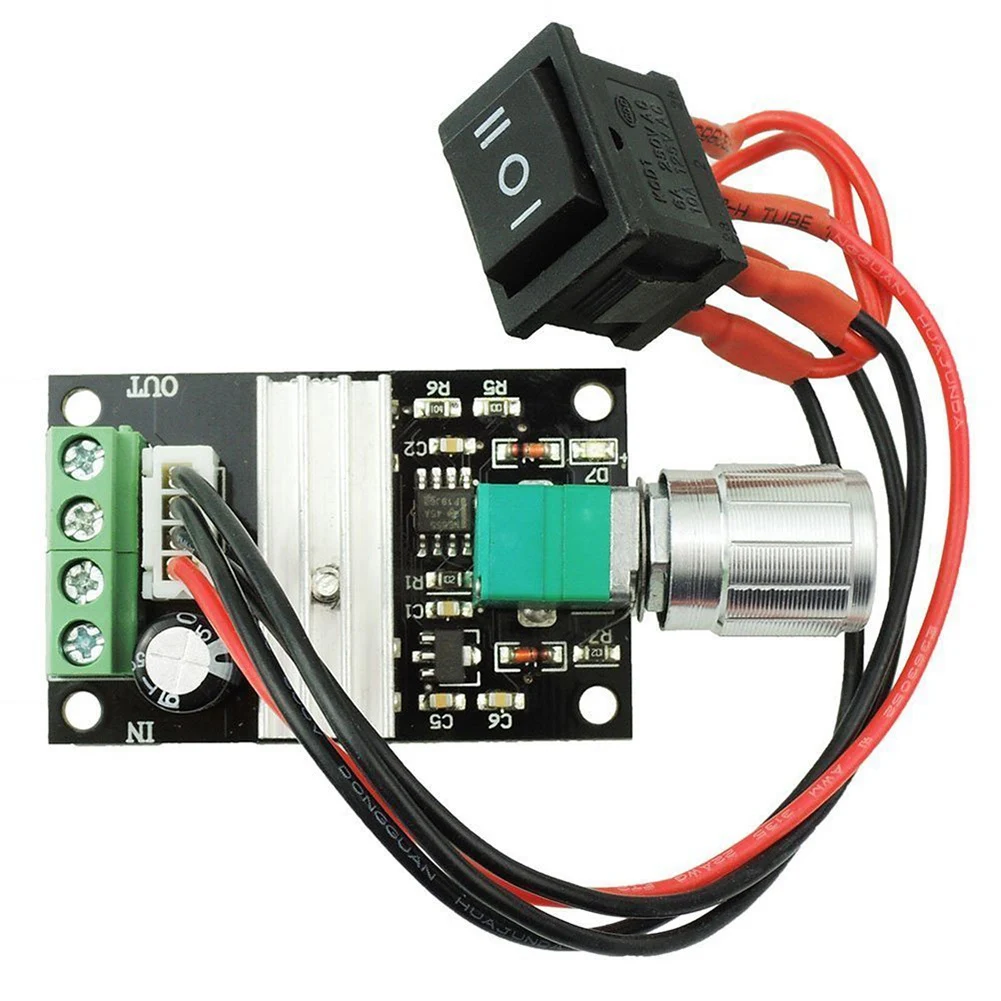
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.
Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.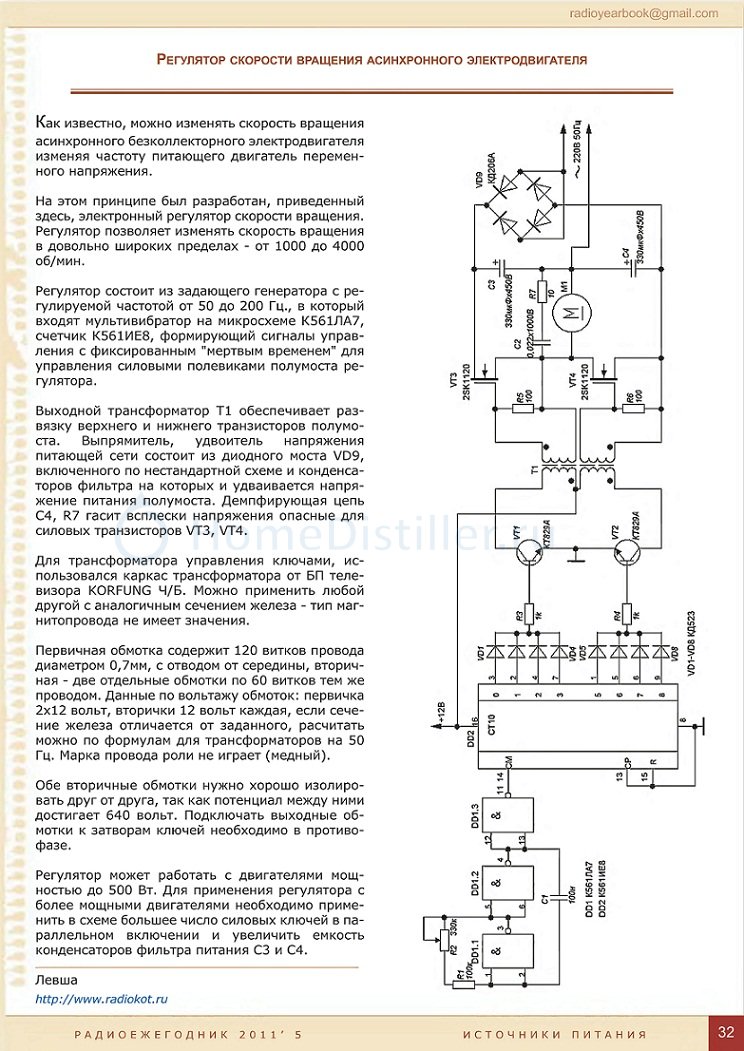
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.
 к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Как своими руками сделать регулятор оборотов электродвигателя
При использовании электродвигателя в различных устройствах и инструментах неизменно возникает необходимость регулировки скорости вращения вала.Самостоятельно сделать регулятор оборотов электродвигателя не составит труда. Нужно лишь подыскать качественную схему, устройство которой полностью бы подходило к особенностям и типу конкретного электрического двигателя.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты, в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Применение электронных регуляторов
Использование мощных асинхронных двигателей невозможно без применения соответствующих регуляторов оборотов. Такие преобразователи используются для следующих целей:
Такие преобразователи используются для следующих целей:
- Ступенчатый разгон и возможность понижения оборотов двигателя при уменьшении нагрузки позволяет уменьшить потребление электроэнергии. Использование частотных преобразователей с мощными асинхронными двигателями позволяет вдвое сократить расходы на электроэнергию.
- Защита электронных механизмов. Преобразователи частоты позволяют контролировать показатели давления, температуры и ряд других параметров. При использовании двигателя в качестве привода насоса в емкости, в которую закачивается жидкость или воздух, может быть установлен датчик давления, отвечающий за управление механизмом и предотвращающий его выход из строя.
- Обеспечение плавного запуска. При запуске электродвигателя, когда мотор сразу начинает работать на максимальных оборотах, на привод приходится повышенная нагрузка. Использование регулятора оборотов обеспечивает плавность запуска, что гарантирует максимально возможную долговечность работы привода и отсутствие его серьезных поломок.

- Сокращаются расходы на техническое обслуживание насосов и самих силовых агрегатов. Наличие регуляторов оборотов снижает риск поломок отдельных механизмов и всего привода.
Используемая частотными преобразователями схема работы аналогична у большинства бытовых приборов. Похожие устройства также используются в сварочных аппаратах, ИБП, питании ПК и ноутбуков, стабилизаторах напряжения, блоках розжига ламп, а также в мониторах и жидкокристаллических телевизорах.
Несмотря на кажущуюся сложность схемы, сделать регулятор оборотов электродвигателя 220 В будет достаточно просто.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
- Электрический двигатель.
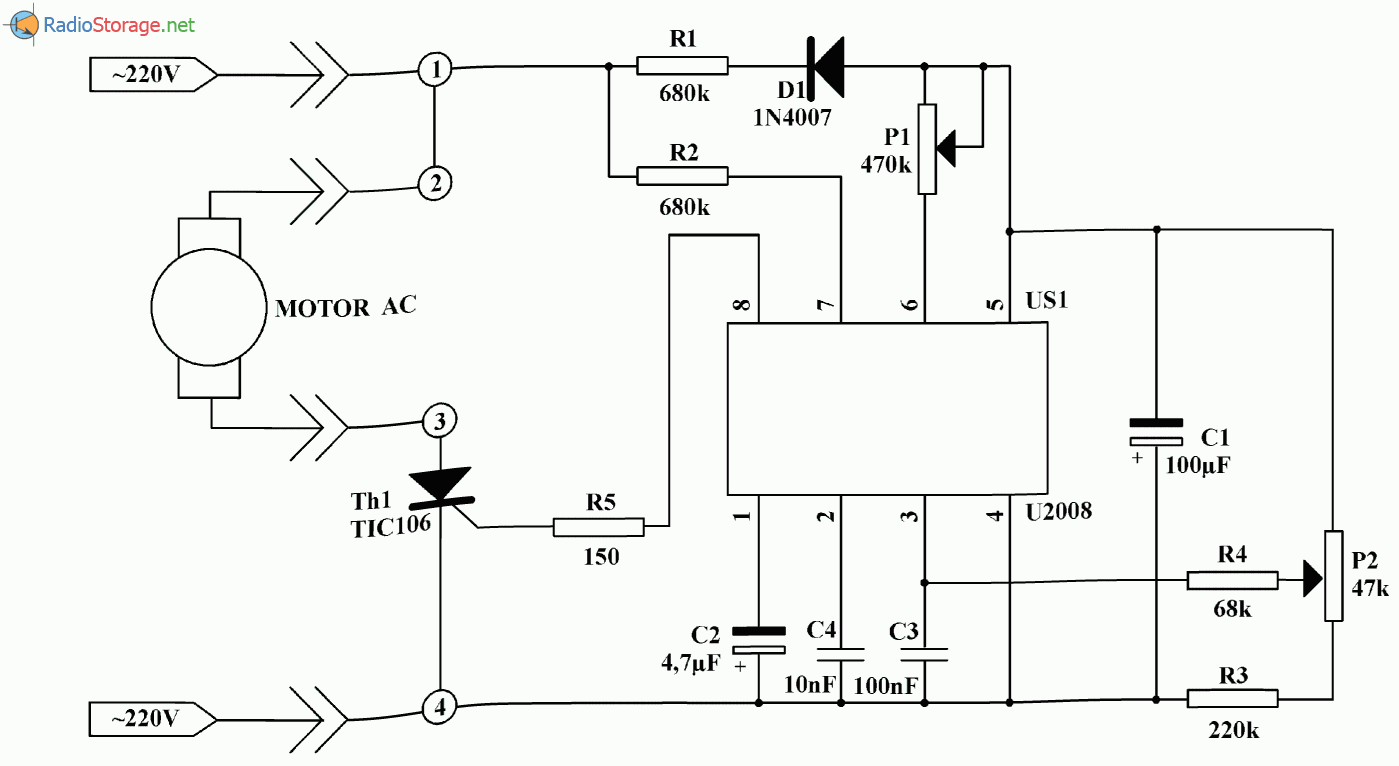
- Блок преобразователя и микроконтроллерная схема управления.
- Механизмы и приводы.
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.

- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.

Схема на ШИМ-транзисторе
Регулировать скорость вращения вала у маломощных электродвигателей можно при помощи шин-транзистора и последовательного соединения резисторов в питании. Этот вариант отличается простотой реализации, однако имеет низкий КПД и не позволяет плавно изменять скорость вращения двигателя. Изготовить своими руками регулятор оборотов коллекторного двигателя 220 В с использованием шим-транзистора не составит особой сложности.
Принцип работы регулятора на транзисторе:
- Используемые сегодня шин-транзисторы имеют генератор пилообразного напряжения частотой в 150 Герц.
- Операционные усилители используются в роли компаратора.
- Изменение скорости вращения осуществляется за счёт наличия переменного резистора, управляющего длительностью импульсов.
Транзисторы имеют ровную постоянную амплитуду импульсов, идентичную амплитуде напряжения питания. Это позволяет выполнять регулировку оборотов двигателя 220 В и поддерживать работу агрегата даже при подаче минимального напряжения на обмотку трансформатора.
Благодаря возможности подключения микроконтроллера к ШИМ-транзистору обеспечивается возможность автоматической настройки и регулировки работы электропривода. Такие схемы исполнения преобразователей могут иметь дополнительные компоненты, которые расширяют функциональные возможности привода, обеспечивая работу в полностью автоматическом режиме.
Внедрение автоматических систем управления
Наличие в регуляторах и частотных преобразователях микроконтроллерного управления позволяет улучшить параметры работы привода, а сам мотор может работать в полностью автоматическом режиме, когда используемый контроллер плавно или ступенчато изменяет показатели частоты вращения агрегата. Сегодня в качестве микроконтроллерного управления используются процессоры, которые имеют отличающееся число выходов и входов. К такому микроконтроллеру можно подключить различные электронные ключи, кнопки, всевозможные датчики потери сигнала и так далее.
В продаже можно найти различные типы микроконтроллеров, которые отличаются простотой в использовании, гарантируют качественную настройку работы преобразователя и регулятора, а наличие дополнительных входов и выходов позволяет подключать к процессору различные дополнительные датчики, по сигналу которых устройство будет уменьшать или увеличивать число оборотов или же полностью прекращать подачу напряжения на обмотки электродвигателя.
Сегодня в продаже имеются различные преобразователи и регуляторы электродвигателя. Впрочем, при наличии даже минимальных навыков работы с радиодеталями и умении читать схемы можно выполнить такое простейшее устройство, которое будет плавно или ступенчато изменять обороты двигателя. Дополнительно можно включить в цепь управляющий симисторный реостат и резистор, что позволит плавно изменять обороты, а наличие микроконтроллерного управления полностью автоматизирует использование электрических двигателей.
Оценка статьи:
Загрузка…Регулировка оборотов асинхронного двигателя своими руками Ссылка на основную публикацию wpDiscuzAdblockdetector
| Электролитические конденсаторы для этой схемы надо брать на рабочее напряжение не менее 450В. С более низким не подойдут. И еще: при любом соединении обмоток электродвигателя, кроме пусковых электролитических конденсаторов, желательно добавить рабочие фазосдвигающие конденсаторы типа МБГЧ, МБГП на рабочее напряжение 400.  ..600В, хотя бы и емкостью в 3…4 раза менее расчетной. Это значительно улучшит работу двигателя при переменных нагрузках (деревообрабатывающий станок, точило, корнерезка и т.п.). Напомним, что расчетная емкость выбирается из условия Сраб=(1,5…2)*66*Рном (читайте схему к рис.2). ..600В, хотя бы и емкостью в 3…4 раза менее расчетной. Это значительно улучшит работу двигателя при переменных нагрузках (деревообрабатывающий станок, точило, корнерезка и т.п.). Напомним, что расчетная емкость выбирается из условия Сраб=(1,5…2)*66*Рном (читайте схему к рис.2).Теперь немного практики. Предположим, у вас двигатель мощностью 300Вт и его выводы соединены «треугольником» (рис.6). Такой двигатель без нагрузки успешно запустится и от одного правильно подобранного конденсатора в 40мкФ, включенного в цепь двигателя. А вот если его заменить диодно-конденсаторной сборкой (рис.4), то понадобится уже их уже четыре, т.е. если ориентироваться по рис.4, то каждый из двух нарисованных конденсаторов должен состоять состоять из последовательно соединенных двух электролитических конденсаторов по 40мкФ. Понятно, что рабочее напряжение их желательно чтобы превышало хоть немного сетевое. Поэтому, если он у вас запускается без проблем и од одного конденсатора, то в диодной сборке нет смысла.  А вот, если его мощность превышает 1…1,5кВт, или он тяжело разгоняется, то нужно использовать диодно-конденсаторную сборку. А вот, если его мощность превышает 1…1,5кВт, или он тяжело разгоняется, то нужно использовать диодно-конденсаторную сборку.Также диодно-конденсаторную сборку целесообразно использовать при соединении обмоток двигателя по схеме «разорванная звезда» (рис.7). Эта схема дает наибольший крутящий момент при запуске двигателя даже с нагрузкой на валу. Электролитические конденсаторы в этой схеме лучше взять с напряжением не менее 450В и собрать согласно схемы рис.7. Рабочий фазосдвигающий конденсатор берется по формуле Ср=66*Рном, т.е. при 1кВт подойдет 60мкФ. Это могут быть бумажные типа МБГП на напряжение 600В. Пусковая электролитическая сборка рассчитывается как (2…3)*Ср, т.е. это в пределах 120…180мкФ. * с использованием материала статьи Ю.А.Сытник «Использование сборки конденсаторов для запуска электродвигателя» Схемы торможения 3-х фазных асинхронных двигателейДанное устройство торможения имеет авторское свидетельство СССР №1295495 кл. На рис.9 и рис.10 представлена еще одна схема торможения асинхронного 3-х фазного двигателя. Эта схема обеспечивает торможение любого двигателя до 3кВт в течение 6 секунд. Эту схему мы лично составили и испытывали на производстве со всеми асинхронными 3-х фазными двигателями до 3кВт включительно. Сама схема включения в работу двигателя и его торможения проста и представлена на рис.10. В работу двигатель включается подачей питающего напряжения через контакты контактора К1. А вот схема подключения кнопочного поста управления режимами двигателя немного посложнее. | Устройство для динамического торможения конденсаторного электродвигателя Представленная схема устройства по авторскому свидетельству №1023598, КЛ. НО2р 3/24, 15.06.83 предназначена для динамического торможения асинхронного конденсаторного электродвигателя с короткозамкнутым ротором малой мощности, которое обеспечивает его автоматическое торможение при отключении от сети путем кратковременного протекания пульсирующего тока по его обмоткам. |
 Н 02 Р3/24, 1987.
Н 02 Р3/24, 1987. Тогда через обмоки статоров обоих двигателей потечет выпрямленный однополупериодный ток. В результате двигатели тормозятся, а эффективность этого торможения зависит от величины тока через обмотки статоров, который регулируется сопротивлением R. С его помощью устанавливается максимально допустимый ток, что, разумеется, повышает долговечность работы устройства. Режим торможения прекращается при выключении и размыкании контактов КМ1. Время торможения и выключения КМ1 надо согласовать. При окончании торможения контактор КМ1 не должен быть включен.
Тогда через обмоки статоров обоих двигателей потечет выпрямленный однополупериодный ток. В результате двигатели тормозятся, а эффективность этого торможения зависит от величины тока через обмотки статоров, который регулируется сопротивлением R. С его помощью устанавливается максимально допустимый ток, что, разумеется, повышает долговечность работы устройства. Режим торможения прекращается при выключении и размыкании контактов КМ1. Время торможения и выключения КМ1 надо согласовать. При окончании торможения контактор КМ1 не должен быть включен.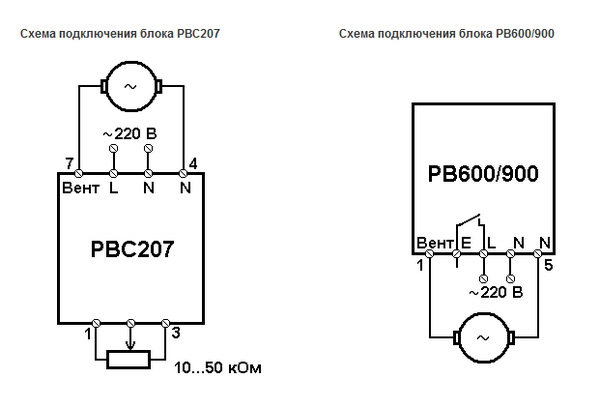 Режим торможения осуществляется подачей однополупериодного выпрямленного диодом VD1 напряжения на статор двигателя. Причем одна фаза подается на одну обмотку, а другая на оставшиеся две, которые в режиме торможения соединяются между собою контактами К2.2 и К2.3 контактора К2. Одна из фаз не используется. Сразу, оговоримся, что, если две оставшиеся обмотки не объединить между собою контактами К2.2 и К2.3, а подать вторую фазу только на одну обмотку — торможения не получится. Поэтому для 3-х фазных двигателей там, где общая точка соединения трех обмоток не доступна по конструктивным причинам их намотки, т.е. не выведена наружу, необходимо соединить в режиме торможения две обмотки. А вот на тех двигателях, где общая точка выведена наружу и доступна для монтажа, рекомендуется выпрямленное напряжение подать на две любые обмотки, а третью закоротить контактом контактора К2. Такое решение показано на рис.11.
Режим торможения осуществляется подачей однополупериодного выпрямленного диодом VD1 напряжения на статор двигателя. Причем одна фаза подается на одну обмотку, а другая на оставшиеся две, которые в режиме торможения соединяются между собою контактами К2.2 и К2.3 контактора К2. Одна из фаз не используется. Сразу, оговоримся, что, если две оставшиеся обмотки не объединить между собою контактами К2.2 и К2.3, а подать вторую фазу только на одну обмотку — торможения не получится. Поэтому для 3-х фазных двигателей там, где общая точка соединения трех обмоток не доступна по конструктивным причинам их намотки, т.е. не выведена наружу, необходимо соединить в режиме торможения две обмотки. А вот на тех двигателях, где общая точка выведена наружу и доступна для монтажа, рекомендуется выпрямленное напряжение подать на две любые обмотки, а третью закоротить контактом контактора К2. Такое решение показано на рис.11. Здесь выполнена защита от возможности включения сразу двух режимов во избежании неприятных последствий. Рассмотрим поконкретнее. Схема управления пусковой катушкой К1 почти стандартная за исключением «врезанного» в цепь ее управления нормально замкнутого контакта К2.4 от катушки торможения К2. Он защищает двигатель от включения пускового режима, пока идет процесс торможения и катушка К2 включена. Пока она будет включена, контакт К2.4 будет разомкнут вместе со стоповой кнопкой SB1. Но начнем по порядку.
Здесь выполнена защита от возможности включения сразу двух режимов во избежании неприятных последствий. Рассмотрим поконкретнее. Схема управления пусковой катушкой К1 почти стандартная за исключением «врезанного» в цепь ее управления нормально замкнутого контакта К2.4 от катушки торможения К2. Он защищает двигатель от включения пускового режима, пока идет процесс торможения и катушка К2 включена. Пока она будет включена, контакт К2.4 будет разомкнут вместе со стоповой кнопкой SB1. Но начнем по порядку.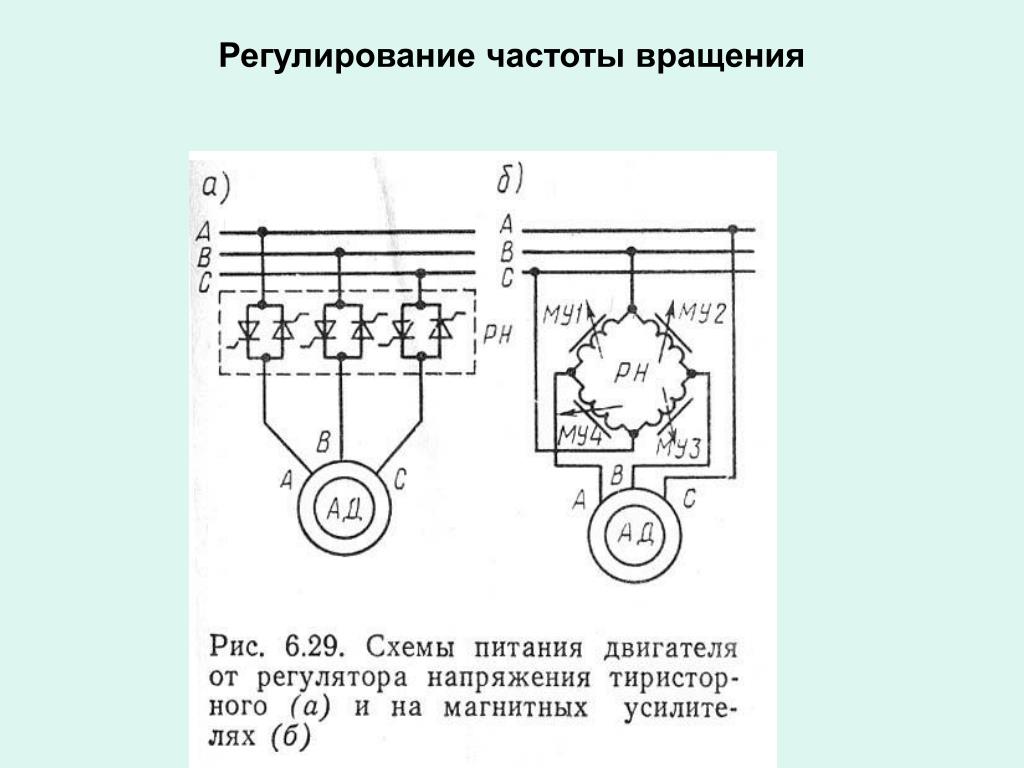 Второй конец катушки запитан, разумеется, напрямую. Как только катушка К1 встанет под ток, ее контакт К1.4 «обойдет», т.е. зашунтирует пусковую кнопку SB2 и ее отпускание уже никак не влияет на процесс — двигатель запущен и получает питание 3-х фазной сети через силовые контакты К1.1, К1.2 и К1.3 контактора К1. При этом цепь питания тормозного контактора К2 разорвана НО контактом SB1.2 кнопки «СТОП» и разомкнувшимся контактом К1.5 вставшей под ток пусковой катушки К1.
Второй конец катушки запитан, разумеется, напрямую. Как только катушка К1 встанет под ток, ее контакт К1.4 «обойдет», т.е. зашунтирует пусковую кнопку SB2 и ее отпускание уже никак не влияет на процесс — двигатель запущен и получает питание 3-х фазной сети через силовые контакты К1.1, К1.2 и К1.3 контактора К1. При этом цепь питания тормозного контактора К2 разорвана НО контактом SB1.2 кнопки «СТОП» и разомкнувшимся контактом К1.5 вставшей под ток пусковой катушки К1. 1, К1.2 и К1.3 контактора К1 (например, их залипании).
1, К1.2 и К1.3 контактора К1 (например, их залипании).  Конденсатор шунтирован резистором R через контакты 3-4 переключателя SA1, которые соединены последовательно с резистором R. Точка соединения фазосдвигающего конденсатора С1 и вспомогательной обмотки В соединена с выводом 2 переключателя SA1.
Конденсатор шунтирован резистором R через контакты 3-4 переключателя SA1, которые соединены последовательно с резистором R. Точка соединения фазосдвигающего конденсатора С1 и вспомогательной обмотки В соединена с выводом 2 переключателя SA1. По окончании заряда конденсатора С2 диод VD1 запирается им, в результате чего ток по обмотка Г и В прекращается. Повторный запуск двигателя вызывает разряд конденсатора С2 на резистор R через замкнутые контакты 3-4 переключателя SA1, и схема готова к новомй циклу торможения.
По окончании заряда конденсатора С2 диод VD1 запирается им, в результате чего ток по обмотка Г и В прекращается. Повторный запуск двигателя вызывает разряд конденсатора С2 на резистор R через замкнутые контакты 3-4 переключателя SA1, и схема готова к новомй циклу торможения. Емкость его определяют экспериментально для получения требуемого времени торможения. Разрядный резистор типа МЛТ-2 сопротивлением 150…200кОм.
Емкость его определяют экспериментально для получения требуемого времени торможения. Разрядный резистор типа МЛТ-2 сопротивлением 150…200кОм.Методы регулирования скорости асинхронного двигателя
Асинхронный двигатель практически представляет собой двигатель с постоянной скоростью, что означает, что для всего диапазона нагрузки изменение скорости двигателя довольно мало. Скорость параллельного двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и низким коэффициентом мощности. Поскольку асинхронные двигатели широко используются, регулирование их скорости может потребоваться во многих приложениях. Различные методы управления скоростью асинхронного двигателя объясняются ниже.Регулировка скорости асинхронного двигателя со стороны статора
1. Путем изменения подаваемого напряжения:
Из уравнения крутящего момента асинхронного двигателя,Сопротивление ротора R 2 постоянно, и если скольжение s мало, то (sX 2 ) 2 настолько мало, что им можно пренебречь.
 Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС, индуцированная ротором, а E 2 ∝ V
Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС, индуцированная ротором, а E 2 ∝ V . Таким образом, T ∝ sV 2 , что означает, что если подаваемое напряжение уменьшается, развиваемый крутящий момент уменьшается.Следовательно, для обеспечения того же момента нагрузки скольжение увеличивается с уменьшением напряжения, и, следовательно, скорость уменьшается. Этот метод самый простой и дешевый, но до сих пор используется редко, потому что для относительно небольшого изменения скорости требуется большое изменение напряжения питания.
2. Изменяя применяемую частоту
Синхронная скорость вращающегося магнитного поля асинхронного двигателя определяется выражением,. где f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется с изменением частоты питания.
 Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за пониженного реактивного сопротивления. А если частота превышает номинальное значение, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) . Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за пониженного реактивного сопротивления. А если частота превышает номинальное значение, максимальный развиваемый крутящий момент падает, а скорость увеличивается.3. Постоянное регулирование U / F асинхронного двигателя
Это самый популярный метод управления скоростью асинхронного двигателя. Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре стремится к насыщению. Это вызовет чрезмерный ток статора и искажение магнитной волны статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный магнитный поток в воздушном зазоре. Величина потока статора пропорциональна отношению напряжения статора к частоте.Следовательно, если отношение напряжения к частоте остается постоянным, магнитный поток остается постоянным. Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения / частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости, этот метод также предлагает возможность «плавного пуска».
Величина потока статора пропорциональна отношению напряжения статора к частоте.Следовательно, если отношение напряжения к частоте остается постоянным, магнитный поток остается постоянным. Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения / частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости, этот метод также предлагает возможность «плавного пуска». 4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости можно увидеть, что синхронная скорость (и, следовательно, скорость движения) может быть изменена путем изменения количества полюсов статора.Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается двумя или более независимыми обмотками статора, намотанными на разное количество полюсов в одинаковых пазах.
Смена полюсов статора достигается двумя или более независимыми обмотками статора, намотанными на разное количество полюсов в одинаковых пазах. Например, статор намотан с двумя 3-фазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-х полюсной обмотки, Ns = 120 * 50/4 = 1500 об / мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120 * 50/6 = 1000 об / мин
Регулировка скорости со стороны ротора:
1.Регулировка реостата ротора
Этот метод аналогичен управлению реостатом якоря параллельного двигателя постоянного тока. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно.2. Каскадный режим
В этом методе регулирования скорости используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель получает питание от наведенной ЭДС в первом двигателе через контактные кольца.Расположение показано на следующем рисунке.
Один двигатель питается от трехфазного источника питания, а другой двигатель получает питание от наведенной ЭДС в первом двигателе через контактные кольца.Расположение показано на следующем рисунке. Двигатель A называется основным двигателем, а двигатель B — вспомогательным двигателем.
Пусть, N с1 = частота двигателя A
N с2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
f = частота питания
Теперь скольжение двигателя A, S 1 = (N s1 — N) / N s1 .
частота ЭДС, индуцированная ротором в двигателе A, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС индукции ротора
, следовательно, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .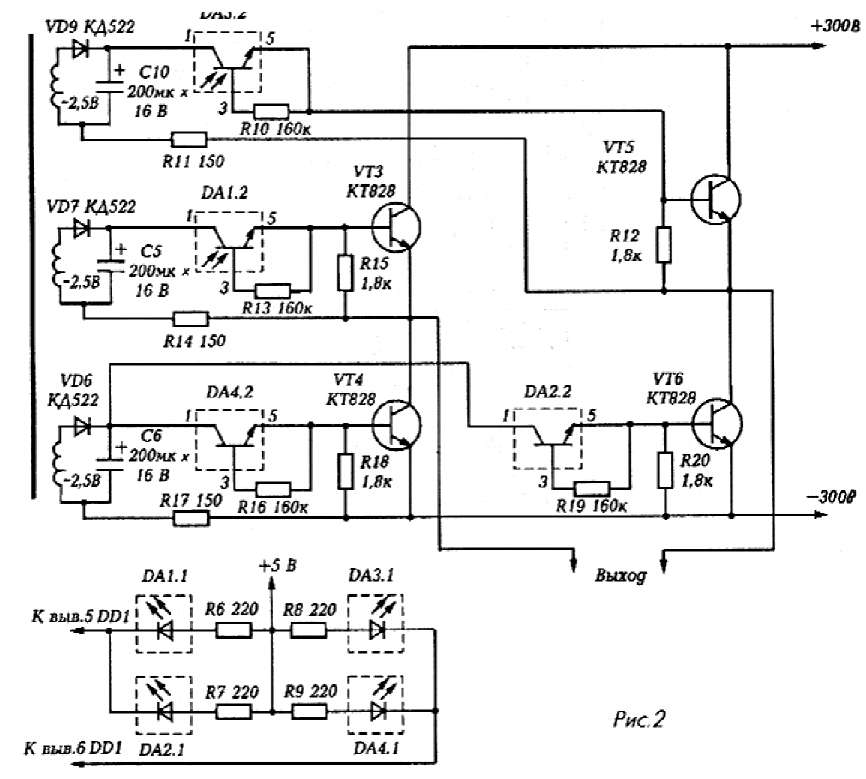
теперь ставим значение S 1 = (N s1 — N) / N s1
я.е. N = N с2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель A, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. Если выполнено коммутационное каскадирование, скорость набора = N = 120f / (P 1 + P 2 )
4. Если выполняется дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )
3.Путем подачи ЭДС в цепь ротора
В этом методе скорость асинхронного двигателя регулируется путем подачи напряжения в цепь ротора. Необходимо, чтобы подаваемое напряжение (ЭДС) имело ту же частоту, что и частота скольжения. Однако ограничений по фазе вводимой ЭДС нет. Если мы подаем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличиваться. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится.Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основным преимуществом этого метода является широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может быть введена различными методами, такими как система Крамера, система Шербиуса и т. Д.
Однако ограничений по фазе вводимой ЭДС нет. Если мы подаем ЭДС, которая находится в противофазе с ЭДС, индуцированной ротором, сопротивление ротора будет увеличиваться. Если мы введем ЭДС, которая находится в фазе с ЭДС, индуцированной ротором, сопротивление ротора уменьшится.Таким образом, изменяя фазу инжектируемой ЭДС, можно управлять скоростью. Основным преимуществом этого метода является широкий диапазон регулирования скорости (как выше нормы, так и ниже нормы). ЭДС может быть введена различными методами, такими как система Крамера, система Шербиуса и т. Д.Методы регулирования скорости для различных типов двигателей с регулировкой скорости
Казуя ШИРАХАТА
Oriental Motor Co., Ltd. предлагает широкий выбор двигателей с регулировкой скорости.Наши комплекты двигателей с регулировкой скорости включают двигатель, привод (контроллер) и потенциометр, который позволяет легко регулировать скорость.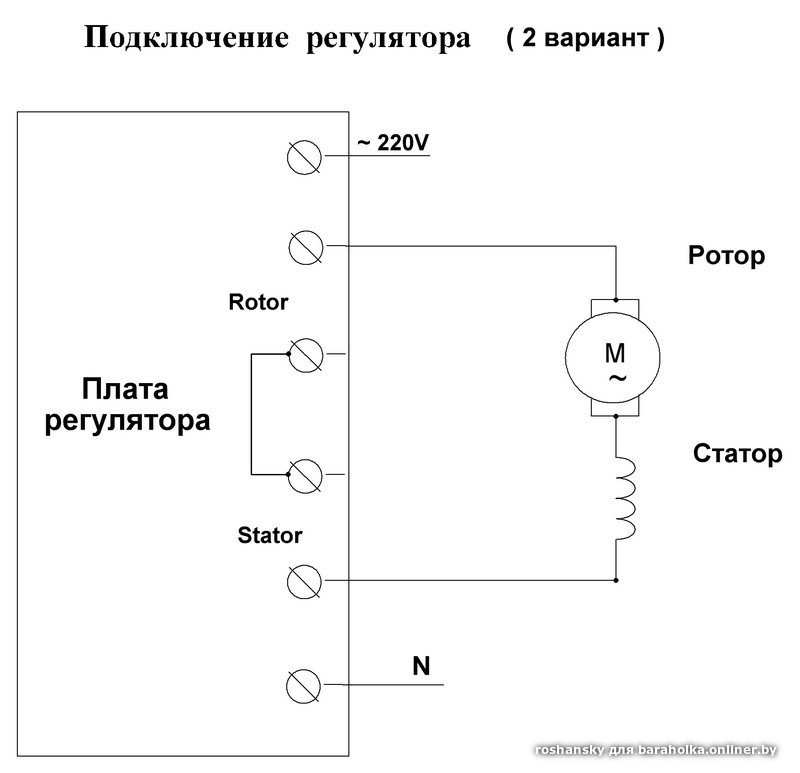 Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
Существует три группы продукции для двигателей с регулировкой скорости. «Блок управления скоростью переменного тока», в котором используется самый популярный однофазный асинхронный двигатель с конденсаторным приводом, небольшой и высокоэффективный «Бесщеточный двигатель постоянного тока» и «Инверторный блок», который объединяет трехфазный асинхронный двигатель с небольшой инвертор. В этой статье объясняется структура, принцип управления скоростью и особенности каждой группы продуктов, а также представлены наши стандартные продукты.
1. Введение
Большое количество двигателей используется для общих целей в нашем окружении, от домашнего оборудования до станков на промышленных предприятиях. Электродвигатель в настоящее время является необходимым и незаменимым источником энергии во многих отраслях промышленности. Эти двигатели имеют самые разные функции и характеристики. Если сосредоточить внимание на сегменте регулирования скорости на рынке двигателей, серводвигатели и шаговые двигатели управляют своей скоростью с помощью последовательности импульсов, в то время как асинхронный двигатель и бесщеточный двигатель постоянного тока регулируют скорость с помощью внешнего резистора и / или напряжения постоянного тока.
В этой статье объясняется структура, принцип управления скоростью и особенности следующих трех групп продуктов, которые могут относительно легко управлять скоростью с помощью аналогового входа.
- Электродвигатель и мотор-редукторы с регулятором скорости переменного тока
- Бесщеточные двигатели постоянного тока и мотор-редукторы
- Инверторный блок
2. Методы регулирования скорости различных двигателей с регулировкой скорости
Метод управления выходом схемы управления скоростью можно условно разделить на две группы: управление фазой и управление инвертором, которые составляют группы продуктов, показанные на рис.1.
Рис.1 Классификация двигателей с регулировкой скорости
2.1. Двигатели с регулировкой скорости переменного тока
2.1.1. Строительство мотора
Как показано на рис. 2, конструкция однофазного и трехфазного асинхронных двигателей включает статор, на котором намотана первичная обмотка, и цельный алюминиевый ротор в форме корзины, отлитый под давлением. Ротор недорогой, потому что конструкция проста и не использует магнит.
Ротор недорогой, потому что конструкция проста и не использует магнит.Фиг.2 Конструкция асинхронного двигателя
Когда необходимо управлять скоростью этого двигателя, для определения скорости используется тахогенератор, который присоединяется к двигателю, как показано на рис. 3. Тахогенератор состоит из магнита, подключенного непосредственно к валу двигателя. и катушка статора, которая обнаруживает магнитные полюса и генерирует переменное напряжение с частотой 12 циклов на оборот. Поскольку это напряжение и частота увеличиваются с увеличением скорости вращения, скорость вращения двигателя регулируется на основе этого сигнала.
Рис.3 Система электродвигателя с регулировкой скорости переменного тока
2.1.2. Принцип управления скоростью
Скорость вращения N асинхронного двигателя может быть выражена выражением (1). Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, изменяется скольжение и , затем изменяется частота вращения N.
Когда напряжение, прикладываемое к двигателю, увеличивается и уменьшается, изменяется скольжение и , затем изменяется частота вращения N.
N = 120 · f · (1- s ) / P · · · · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
В случае асинхронного двигателя, показанного на рис.4, на кривой «Скорость вращения — Крутящий момент» существует стабильный диапазон и нестабильный диапазон. Поскольку невозможно надежно работать в нестабильном диапазоне, простое управление напряжением (управление разомкнутым контуром) ограничивается регулированием скорости в узком диапазоне, например N1 ~ N3 на рис. 5. Чтобы обеспечить надежную работу даже в вышеупомянутый нестабильный диапазон, необходимо определить скорость вращения двигателя и использовать механизм регулирования напряжения (управление с обратной связью), который уменьшает ошибку скорости по сравнению с заданным значением.
Рис. 4 Частота вращения — крутящий момент асинхронных двигателей
Рис.5 Простое управление напряжением
Доступные методы управления напряжением включают управление трансформатором или управление фазой. На рис. 6 показано, когда напряжение регулируется с помощью трансформатора. Этот метод не так-то просто сделать с двигателем, регулирующим скорость переменного тока. В качестве альтернативы, напряжение переменного тока можно регулировать, задав время включения / выключения каждого полупериода переменного напряжения (50 или 60 Гц), подаваемого на двигатель, с помощью переключающего элемента (тиристора или симистора), который может напрямую включать и выключать переменный ток. напряжение, как показано на рис.7 и 8. Регулирование скорости достигается методом фазового регулирования путем регулирования среднеквадратичного значения. значение переменного напряжения.
Рис.6 Изменение напряжения трансформатором
Рис.7 Изменение напряжения с помощью фазового управления
Рис.8 Цепь управления симистором
Этот метод управления скоростью переменного тока может обеспечить устойчивое управление скоростью за счет регулирования фазы с обратной связью даже в нестабильном диапазоне.
На рис. 9 показана конфигурация системы управления скоростью для двигателя переменного тока в виде блок-схемы.
Рис.9 Блок-схема системы электродвигателя с регулировкой скорости переменного тока
Рис.10 Форма сигнала для каждого блока
На рис. 10 показаны формы сигналов каждого блока. Установленное значение скорости d и обнаруженное напряжение e скорости, генерируемое тахогенератором, сравниваются в блоке усилителя сравнения.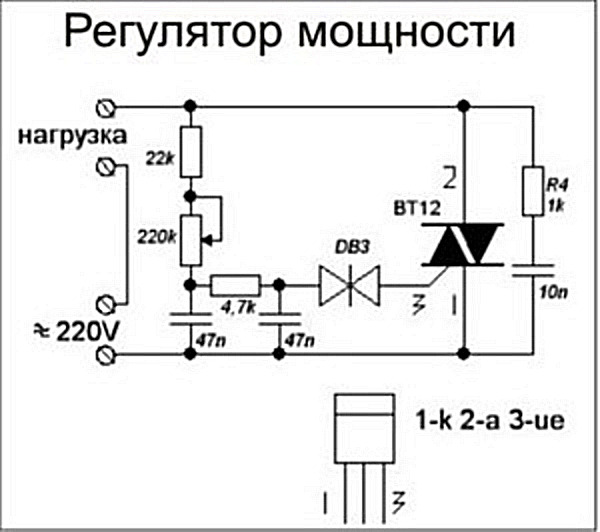 Затем определяется уровень сигнала напряжения a .
Затем определяется уровень сигнала напряжения a .
Сигнал напряжения a имеет низкий уровень, когда обнаруженное значение скорости до заданного значения скорости увеличивается, и выше, когда заданное значение скорости уменьшается. Поскольку сигнал запуска выводится в точке, где треугольная волна b пересекается с сигналом напряжения a , определяется синхронизация (фазовый угол), когда симистор включен, с уровнем сигнала напряжения a . Когда это время является медленным, напряжение, подаваемое на двигатель, становится низким, и скорость вращения двигателя уменьшается.Пониженная скорость вращения возвращается снова, и управление повторяется, так что разница между определенным значением скорости и установленным значением скорости всегда может быть постоянной.
На рис. 11 показан внешний вид упомянутого выше регулятора скорости. На рис. 11 рабочая точка двигателя образует контур Q-R-S-T-Q с центром на O, и скорость вращения поддерживается между N1 и N2.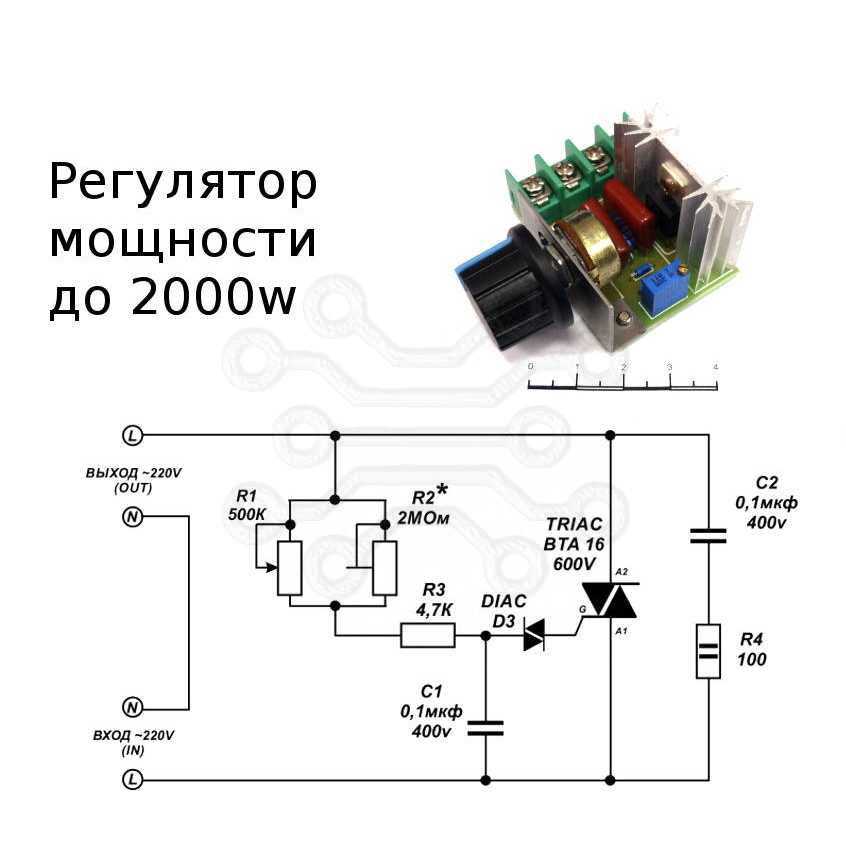 Этот цикл максимально сокращен за счет повышения точности определения скорости.
Этот цикл максимально сокращен за счет повышения точности определения скорости.
Фиг.11 Работа регулятора скорости
Двигатель с регулировкой скорости переменного тока имеет следующие особенности при использовании этого регулирования фазы с обратной связью.
1) Поскольку напряжение переменного тока регулируется напрямую, схему управления скоростью можно настроить просто потому, что в схеме сглаживания нет необходимости, что позволяет получить компактную конструкцию по низкой цене.
2) Таким же образом возможна долговечная конструкция, поскольку нет необходимости в большом алюминиевом электролитическом конденсаторе.
3) Переключение выполняется только один раз в течение каждого полупериода промышленного источника питания переменного тока, что снижает уровень генерируемого шума.
2.1.3. Характеристики
Электродвигатели переменного тока с регулировкой скорости обычно имеют характеристики «Скорость вращения — Крутящий момент», показанные на рис. 12.
12.
Рис.12 Характеристики крутящего момента и скорости вращения
«Строка безопасной эксплуатации» приведена на рис. 12. «Строка безопасной эксплуатации» представляет собой ограничение, при котором двигатель может работать в непрерывном режиме без превышения максимально допустимой температуры.
2.2. Бесщеточный блок управления скоростью постоянного тока
2.2.1. Конструкция двигателя
Что касается конструкции бесщеточного двигателя, катушка соединена звездой (Y-соединена) с тремя фазами: U, V и W и расположена в статоре, а ротор состоит из магнитов. намагничены в многополюсной конфигурации, как показано на рис. 14.
Внутри статора три ИС Холла расположены как магнитные элементы, так что разность фаз выходного сигнала от каждой ИС Холла будет составлять 120 градусов при каждом повороте ротор.
Рис.14 Конструкция бесщеточного двигателя постоянного тока
2.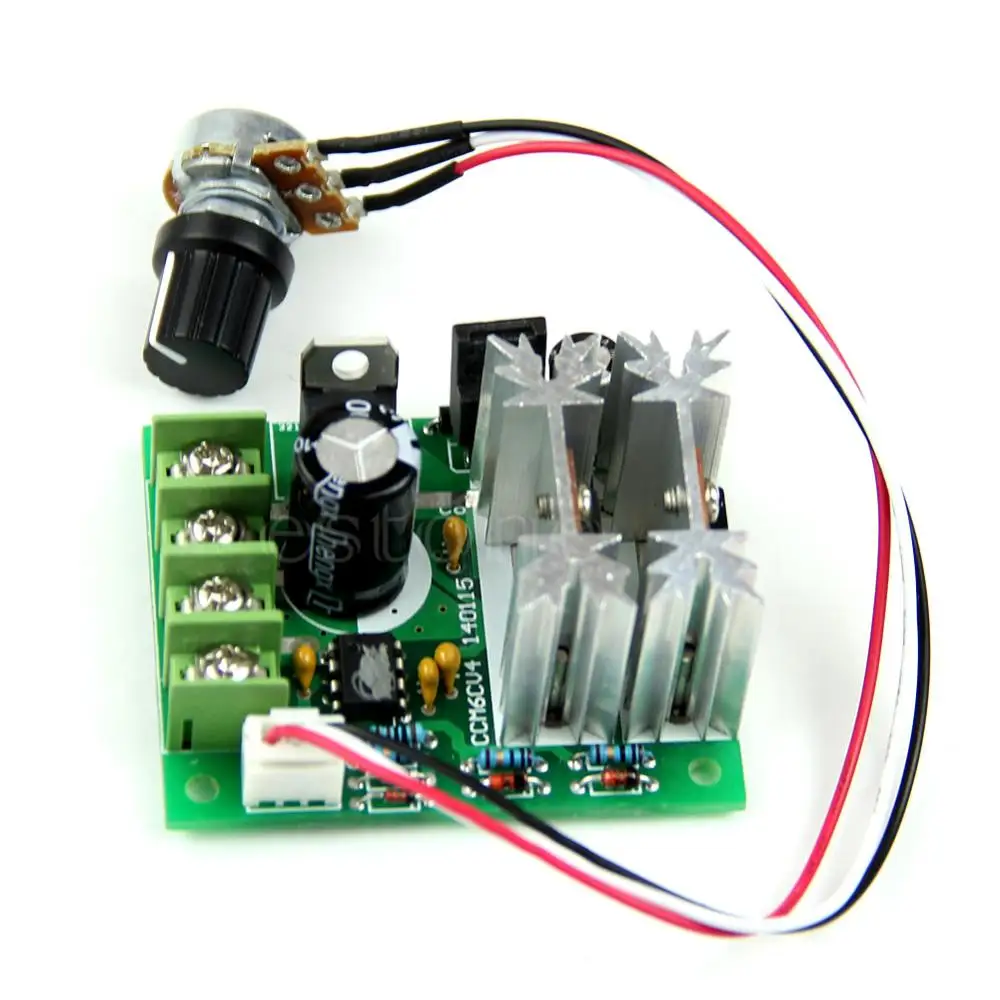 2.2. Принцип управления скоростью
2.2. Принцип управления скоростью
Как показано на рис. 15, характеристики вращательной скорости-момента бесщеточного двигателя постоянного тока показывают отрицательную наклонную характеристику, когда его скорость не контролируется, что аналогично тому, как у щеточного двигателя постоянного тока.
Рис.15 Характеристики скорости вращения бесщеточного двигателя постоянного тока
Когда нагрузка не приложена и входное напряжение установлено на V2 на рисунке 15, рабочая точка двигателя становится P, а скорость вращения равна N1.Когда прикладывается крутящий момент T1 нагрузки, рабочая точка смещается на Q, а скорость вращения снижается до N2, однако скорость вращения возвращается к N1, если напряжение повышается до V3. Следовательно, поскольку скорость вращения изменяется всякий раз, когда изменяется крутящий момент нагрузки, механизму управления скоростью нужно будет только изменять входное напряжение всякий раз, когда наблюдается изменение скорости, чтобы поддерживать постоянную скорость на линии PR.
Этот контроль напряжения реализуется инвертором в выходной части схемы управления (драйвер).Этот инвертор генерирует трехфазное переменное напряжение из постоянного тока путем включения и выключения, как в последовательности, показанной на рис. 16 (b), с использованием шести переключающих элементов (полевых транзисторов или IGBT), показанных на рис. 16 (а).
Рис. 16 (a) Выходная часть схемы управления (драйвер)
Рис.16 (b) Последовательность переключения
Переключающие элементы подключены к обмотке двигателя, как показано на рис. 16 (a), и состояние ВКЛ / ВЫКЛ переключающего элемента определяет, какая катушка статора находится под напряжением и в каком направлении будет течь ток, то есть какая катушка становится полюсом N или полюсом S.
Фактически, положение магнитного полюса ротора определяется ИС Холла, и соответствующий переключающий элемент включается или выключается, как показано на Рис. 16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1 ~ 12).
16 (b). Например, в случае шага 1 транзисторы Tr1 и Tr6 включаются, и ток течет из U-фазы в W-фазу. В это время U-фаза возбуждается как полюс N, а фаза W становится S-полюсом, и ротор поворачивается на 30 градусов, переходя к шагу 2. Один оборот ротора выполняется путем повторения этой операции 12 раз (шаг 1 ~ 12).
На рис. 17 показана конфигурация для управления скоростью бесщеточного двигателя постоянного тока в виде блок-схемы.
Рис.17 Блок-схема системы бесщеточного двигателя постоянного тока
Последовательность переключения инвертора определяется сигналом от ИС Холла в части определения положения на блок-схеме, и двигатель вращается.
Затем сигнал от ИС Холла отправляется на датчик скорости, чтобы стать сигналом скорости, и он сравнивается с сигналом установки скорости в блоке усилителя сравнения, который затем генерирует сигнал отклонения.Значение входного тока двигателя определяется блоком настройки ШИМ на основе сигнала отклонения. Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока
имеют следующие особенности.
1) Он имеет высокий КПД, поскольку используется ротор с постоянными магнитами и вторичные потери малы.
2) Инерция ротора может быть уменьшена, и достигается высокая скорость реакции.
3) Можно уменьшить размер двигателя, поскольку он очень эффективен.
4) Колебания скорости при изменении нагрузки незначительны.
Фиг.16 показана типичная последовательность переключения (метод подачи напряжения на 120 градусов). Еще более эффективная система бесщеточного двигателя постоянного тока использует метод возбуждения синусоидальной волны, получая информацию о положении ротора с высоким разрешением из программного обеспечения из сигнала IC Холла. Этот метод обеспечивает малошумный метод управления двигателем, поскольку ток, протекающий через двигатель, не изменяется быстро. (2)
Рис. 18 Сравнение напряжений, прикладываемых с помощью метода возбуждения синусоидальной волны и метода возбуждения 120 градусов
2. 2.3. Характеристики
2.3. Характеристики
Характеристики скорости вращения и крутящего момента бесщеточного двигателя постоянного тока имеют ограниченную рабочую область в дополнение к области непрерывной работы.
Ограниченная рабочая зона очень эффективна при запуске инерционной нагрузки. Однако, когда работа в ограниченном режиме работы продолжается в течение пяти секунд или более, активируется функция защиты водителя от перегрузки, и двигатель замедляется до полной остановки.
2.3. Блок управления скоростью инвертора
2.3.1. Принцип управления скоростью
Блок инвертора регулирует скорость трехфазного асинхронного двигателя, изменяя частоту f напряжения, подаваемого на двигатель. Инверторный блок изменяет частоту f, изменяя цикл включения / выключения шести переключающих элементов, а скорость вращения (N) двигателя изменяется пропорционально выражению в формуле (1).
N = 120 · f · (1- s ) / P ·· · · · · · · · · (1)
N : Скорость вращения [об / мин]
F : Частота 〔Гц〕
P : Число полюсов двигателя
S : Скольжение
Кроме того, чтобы напряжение, подаваемое на обмотку, имело синусоидальную форму, инвертор регулирует рабочий цикл ВКЛ / ВЫКЛ, как показано на рис.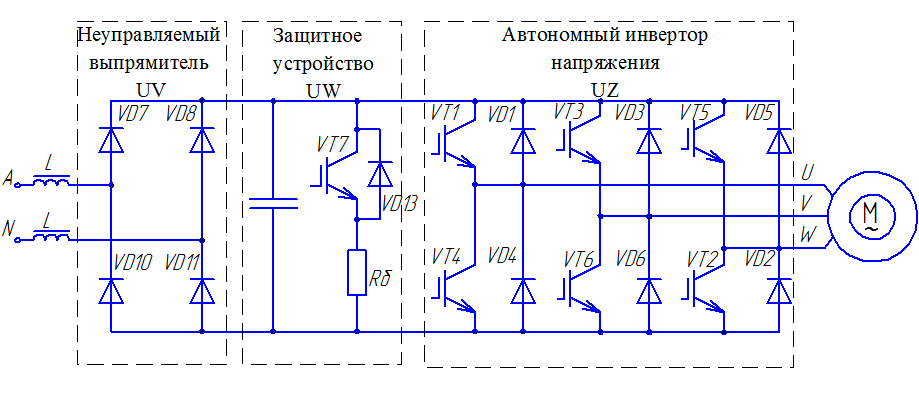 21. Время включения / выключения регулируется таким образом, что среднее напряжение, приложенное к двигателю, приобретает форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой сигнала синусоидальной формы. Этот метод называется ШИМ-управлением.
21. Время включения / выключения регулируется таким образом, что среднее напряжение, приложенное к двигателю, приобретает форму синусоиды, путем сравнения треугольной волны, называемой несущим сигналом, с формой сигнала синусоидальной формы. Этот метод называется ШИМ-управлением.
Рис.19 Дежурный контроль ВКЛ / ВЫКЛ
Метод управления скоростью наших инверторных блоков делится на два типа: управление с обратной связью, которое просто изменяет скорость, и управление с обратной связью, которое уменьшает изменение скорости при изменении нагрузки двигателя.
1) Управление без обратной связи
На рис. 22 показана конфигурация управления без обратной связи в виде блок-схемы.
Рис.20 Блок-схема управления разомкнутым контуром
Этот метод используется для изменения входного напряжения и частоты двигателя в соответствии с заданной частотой. Этот метод подходит для изменения скорости и может достигать высоких скоростей (частоту можно установить до 80 Гц. ) Просто тогда, когда регулирование скорости с изменяющимися нагрузками не представляет особой важности.
) Просто тогда, когда регулирование скорости с изменяющимися нагрузками не представляет особой важности.
Создаваемый крутящий момент T двигателя отображается формулой (2).Исходя из этого соотношения, можно сказать, что крутящий момент также будет постоянным, если сделать постоянным V / f, отношение напряжения V к частоте f.
T = K ・ I ・ V / f ・ ・ ・ (2)
T : Крутящий момент [Н · м]
V : Напряжение питания [В]
I : Ток двигателя [A]
f : Частота [Гц]
K : Постоянная
Однако чем ниже скорость, тем труднее поддерживать постоянным входное сопротивление асинхронного двигателя при изменении f.Следовательно, чтобы получить постоянный крутящий момент от низкой скорости к высокой скорости, необходимо отрегулировать отношение V / f на низкой скорости в соответствии с характеристиками двигателя, как показано на рис. 23 сплошной линией.
23 сплошной линией.
Рис.21 V / f Control
2) Управление с обратной связью
На рис. 24 показана конфигурация блок-схемы системы управления с обратной связью, используемой в нашей серии BHF.
Рис.22 Блок-схема управления по замкнутому циклу
Этот метод определяет разность фаз между напряжением выходного блока инвертора и первичным током, который вычисляет частоту возбуждения, соответствующую нагрузке, с использованием таблицы данных характеристик (рис.25), подготовленный заранее, и регулирует частоту инвертора без необходимости в датчике скорости на двигателе.
Рис.23 Характеристики Таблица данных
Используя эту таблицу характеристик и время t обнаруженной разности фаз, инвертор вычисляет выходную частоту инвертора, которая соответствует команде Nset скорости вращения, установленной потенциометром скорости, и выводит ее как выходную частоту инвертора. После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
После получения выходной частоты блок управления U / f вычисляет напряжение, приложенное к двигателю, соответствующее выходной частоте f, и выполняет управление скоростью, управляя инвертором PWM.В результате при приложении нагрузки выходная частота инвертора увеличивается, так что уменьшение скорости вращения может быть компенсировано. (3)
2.3.2. Характеристика с
Характеристики вращательной скорости-момента инверторного блока показаны на рис. 26 и 27. Как объяснено в разделе, посвященном двигателю, регулирующему скорость переменного тока, на характеристике крутящего момента нарисована «линия безопасной работы». Эта линия представляет предел для непрерывной работы, а область под этой линией называется областью непрерывной работы.
Рис.24 Характеристики скорости вращения и момента для управления без обратной связи
Рис.25 Характеристики скорости вращения и момента для замкнутого контура управления
3. Резюме
Резюме
Oriental Motor предлагает три группы продуктов (двигатели с регулировкой скорости переменного тока, бесщеточные двигатели с регулировкой скорости постоянного тока и инверторные блоки) для использования в широком диапазоне приложений регулирования скорости. Подходящий продукт для регулирования скорости можно выбрать в соответствии с функцией, производительностью, стоимостью и целью, которые требуются для вашего приложения.
Oriental Motor продолжит работу над разработкой продукции, чтобы в будущем мы могли предлагать продукцию, которая наилучшим образом отвечает различным потребностям наших клиентов.
Список литературы
(1) Исследовательская группа по технологиям двигателей переменного тока: «Книга для понимания малых двигателей переменного тока», Kogyo Chosakai Publishing (1998)
(2) Казуо Абэ: «Технология бесшумного привода бесщеточного двигателя», RENGA № 163, стр. 19-25 (2003)
(3) Кодзи Намихана, Масаёши Сато: «Новый метод управления трехфазным асинхронным двигателем», RENGA No. 159, стр 23-28 (1999)
159, стр 23-28 (1999)
| Кадзуя Сирахата Завод Цуруока, Операции ACIX Подразделение схемотехники Секция разработки схем |
VFD или Triac Phase Control для асинхронных двигателей переменного тока?
Когда напряжение подается на асинхронный двигатель переменного тока, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом.В этом сообщении в блоге представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе управления скоростью для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2 серии
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью.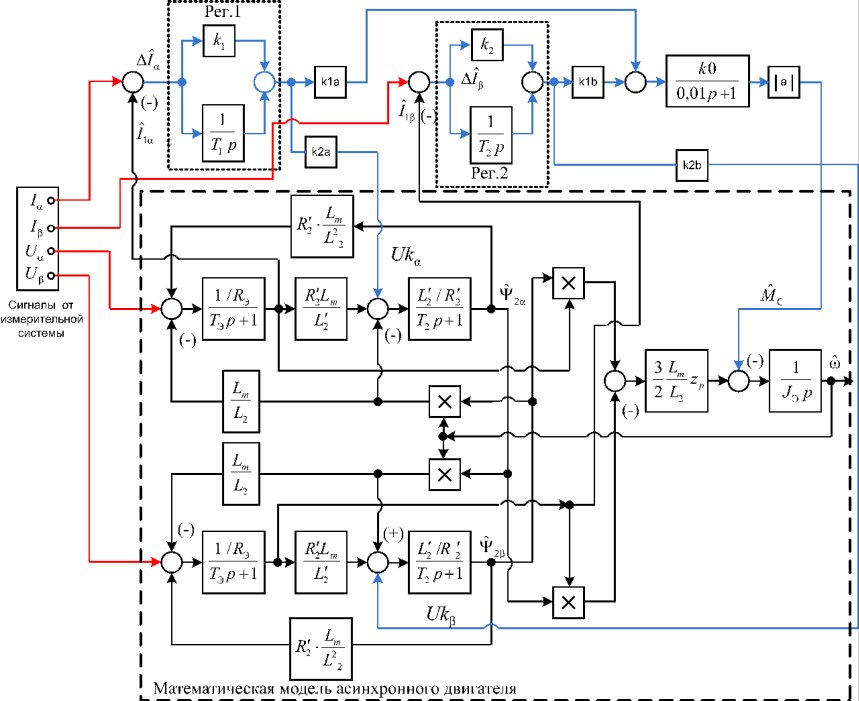 С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц).При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Преобразователь частоты управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов. Такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что для него требуется трехфазный асинхронный двигатель переменного тока с продолжительной нагрузкой. Если в двигателе имеется тормозной механизм любого типа, он обычно сокращает рабочий цикл. Я видел однофазные частотно-регулируемые приводы на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Если в двигателе имеется тормозной механизм любого типа, он обычно сокращает рабочий цикл. Я видел однофазные частотно-регулируемые приводы на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Способ управления скоростью однофазных асинхронных двигателей переменного тока
Теперь давайте посмотрим на другой метод управления скоростью. Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения.Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости. Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент. Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока.
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц. Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно падает при падении напряжения на 10 В.Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет. В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости.Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения). Oriental Motor использует тахогенераторы с нашими двигателями с регулировкой скорости переменного тока, такими как серии DSC или US2. Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией.Вы можете видеть, что мы используем TRIAC для управления напряжением. Также мы используем однополупериодный выпрямитель.
Это показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от частотно-регулируемого привода. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с приводом от частотно-регулируемого привода, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.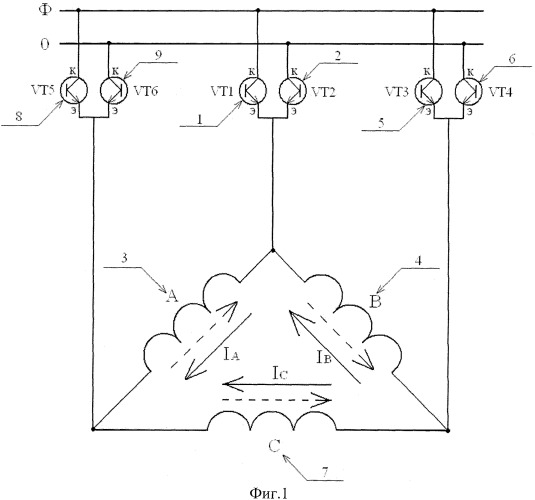
Еще одно преимущество, представленное в серии DSC, — это вертикальная работа.В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет схему управления скоростью думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость.Однако при уменьшении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении обеспечивает контролируемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулировкой скорости вращения с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента скорости двигателя помечена, чтобы показать это.Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы), пожалуйста, обратитесь к пунктирной линии, обозначенной «Допустимый крутящий момент для комбинированного типа».
Кривая крутящего момента скорости двигателя помечена, чтобы показать это.Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы), пожалуйста, обратитесь к пунктирной линии, обозначенной «Допустимый крутящий момент для комбинированного типа».
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Пожалуйста, подпишитесь в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низких температурах, более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей, идеально подходят бесщеточные двигатели. Для таких применений, как двойные ленточные конвейеры, машины для полировки / удаления заусенцев или перемешивающие машины, слишком сильные колебания скорости из-за нагрузки могут повлиять на конечный продукт.
Щелкните ниже, чтобы сравнить 3 доступные технологии регулирования скорости. |
 Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.
Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.Три способа управления однофазным асинхронным двигателем
Каждый день инженеры разрабатывают продукты, в которых используются однофазные асинхронные двигатели. Регулирование скорости однофазных асинхронных двигателей желательно в большинстве приложений управления двигателями, поскольку оно не только обеспечивает регулировку скорости, но также снижает потребление энергии и звуковой шум.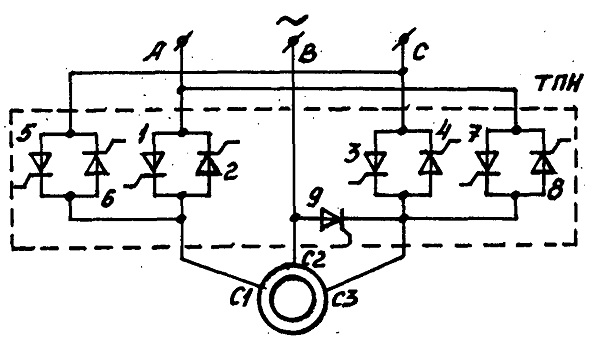
Большинство однофазных асинхронных двигателей являются однонаправленными, что означает, что они предназначены для вращения в одном направлении.Либо путем добавления дополнительных обмоток, внешних реле и переключателей, либо путем добавления зубчатых передач, направление вращения можно изменить. Используя системы управления на основе микроконтроллеров, можно добавить в систему изменение скорости. В дополнение к опции изменения скорости, направление вращения также может быть изменено в зависимости от используемых алгоритмов управления двигателем.
Двигатели с постоянным разделенным конденсатором (PSC) — самый популярный тип однофазных асинхронных двигателей. В этой статье будут рассмотрены различные методы и топологии приводов для управления скоростью двигателя PSC в одном и двух направлениях.
Интерфейс микроконтроллера
Микроконтроллер — это мозг системы. Часто контроллеры, используемые для приложений управления двигателем, имеют специализированные периферийные устройства, такие как ШИМ для управления двигателем, высокоскоростные аналого-цифровые преобразователи (АЦП) и диагностические выводы. PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
PIC18F2431 и dsPIC30F2010 от Microchip имеют эти встроенные функции.
Наличие доступа к специализированным периферийным устройствам микроконтроллера упрощает реализацию алгоритмов управления.
Каналы АЦП используются для измерения тока двигателя, температуры двигателя и температуры радиатора (подключены к выключателям питания). Третий канал АЦП используется для считывания уровней потенциометра, который затем используется для установки скорости двигателя. Дополнительные каналы АЦП могут использоваться в конечном приложении для считывания различных датчиков, таких как бесконтактный переключатель, датчики мутности, уровня воды, температуры морозильной камеры и т. Д.
Входы и выходы общего назначения (I / Os) могут использоваться для взаимодействия переключает и отображает в приложении.Например, в приложении для холодильника эти универсальные входы / выходы могут использоваться для управления ЖК-дисплеем, семисегментным светодиодным дисплеем, кнопочным интерфейсом и т. Д. Каналы связи, такие как I2C ™ или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Д. Каналы связи, такие как I2C ™ или SPI ( TM) используются для соединения платы управления двигателем с другой платой для обмена данными.
Интерфейсы неисправностей и диагностики включают в себя входные линии со специальными функциями, такими как возможность отключения ШИМ в случае катастрофических сбоев в системе. Например, в посудомоечной машине, если привод заблокирован из-за скопившихся отходов, это может помешать вращению двигателя.Эта блокировка может быть обнаружена в виде перегрузки по току в системе управления двигателем. Используя функции диагностики, эти типы неисправностей могут регистрироваться и / или отображаться, или передаваться на ПК для устранения неисправностей обслуживающего персонала. Часто это предотвращает серьезные отказы и сокращает время простоя продукта, что приводит к снижению затрат на обслуживание.
Аппаратный интерфейс для PIC 18F2431 или dsPIC30F2010. |
ШИМ — это основные периферийные устройства, используемые для управления двигателем. Используя указанные выше входные данные, алгоритм управления двигателем микроконтроллера определяет рабочий цикл ШИМ и схему вывода. К наиболее ценным функциям PWM относятся дополнительные каналы с программируемым мертвым временем. ШИМ могут быть выровнены по краю или по центру. Выровненные по центру ШИМ имеют то преимущество, что они снижают электромагнитный шум (EMI), излучаемый изделием.
Вариант № 1: Однонаправленное управление
Управление VF в одном направлении упрощает топологию привода и алгоритм управления.Задача состоит в том, чтобы создать источник питания с переменным напряжением и частотой из источника питания с фиксированным напряжением и частотой (такого как источник питания от розетки). На рисунке на странице 85 показана блок-схема этой топологии привода с тремя основными секциями построения, которые обсуждались ранее. Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, доступные в продаже, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, включенным последовательно с пусковой обмоткой.В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2).
Обмотки двигателя подключены к центру каждого полумоста на выходной секции инвертора. Многие двигатели, доступные в продаже, имеют как основную, так и пусковую обмотки, соединенные вместе с конденсатором, включенным последовательно с пусковой обмоткой.В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2).
MCU, показанный на блок-схеме, имеет модуль PWM управления мощностью (PCPWM), который способен выводить до трех пар PWM с зоной нечувствительности между парами. Зона нечувствительности важна в приложении управления асинхронным двигателем, чтобы избежать перекрестной проводимости шины постоянного тока через переключатели питания, когда один выключается, а другой включается. Схема диагностики может включать в себя контроль тока двигателя, контроль напряжения на шине постоянного тока и контроль температуры на радиаторе, подключенном к силовым переключателям и двигателю.
| Блок-схема топологии привода с тремя основными секциями здания. В этой конфигурации двигатель может иметь только два выступающих провода (M1 и M2). Показанный MCU имеет модуль ШИМ, который способен выводить до трех пар ШИМ с зоной нечувствительности между парами. |
| Двунаправленное управление с помощью H-моста. |
Двунаправленное управление
Большинство двигателей PSC предназначены для работы в одном направлении. Однако во многих приложениях требуется двунаправленное вращение двигателя. Исторически для достижения двунаправленного вращения использовались зубчатые передачи или внешние реле и переключатели. При использовании механических шестерен вал двигателя вращается в одном направлении, а шестерни прямого и обратного хода включаются и выключаются в соответствии с требуемым направлением. С помощью реле и переключателей полярность пусковой обмотки электрически меняется на обратную в зависимости от требуемого направления.
К сожалению, все эти компоненты увеличивают стоимость системы для базового управления включением и выключением в двух направлениях.
В этом разделе мы обсудим два метода двунаправленного управления скоростью для двигателей PSC с использованием привода на основе микроконтроллера. Обсуждаемые здесь топологии привода создают эффективные напряжения, которые приводят в действие главную обмотку и пусковую обмотку с фазовым сдвигом на 90 градусов относительно друг друга. Это позволяет разработчику системы навсегда удалить конденсатор, включенный последовательно с пусковой обмоткой, из схемы, тем самым снижая общую стоимость системы.
Вариант № 2: H-мостовой инвертор
У этого метода есть удвоитель напряжения на входе; на выходе используется H-мост или двухфазный инвертор (см. рисунок выше). К каждому полумосту подключаются один конец основной и пусковой обмоток; другие концы соединены вместе в нейтральной точке источника переменного тока, которая также служит центральной точкой для удвоителя напряжения.
Для схемы управления требуется четыре ШИМ с двумя дополнительными парами и достаточной зоной нечувствительности между дополнительными выходами.PWM0-PWM1 и PWM2-PWM3 — это пары ШИМ с зоной нечувствительности. Используя ШИМ, шина постоянного тока синтезируется для обеспечения двух синусоидальных напряжений, сдвинутых по фазе на 90 градусов, с различной амплитудой и переменной частотой в соответствии с профилем VF. Если напряжение, приложенное к основной обмотке, отстает от пусковой обмотки на 90 градусов, двигатель вращается в прямом направлении. Чтобы изменить направление вращения, напряжение, подаваемое на главную обмотку, должно опережать напряжение, подаваемое на пусковую обмотку.
| Фазные напряжения при вращении двигателя в прямом и обратном направлении. |
Этот метод преобразователя H-моста для управления двигателем типа PSC имеет следующие недостатки.
Основная и пусковая обмотки имеют разные электрические характеристики. Таким образом, ток, протекающий через каждый переключатель, неуравновешен. Это может привести к преждевременному выходу из строя коммутационных аппаратов в инверторе.
Общая точка обмоток напрямую подключена к нейтрали. Это может увеличить количество коммутационных сигналов, проникающих в основной источник питания, и может увеличить шум, излучаемый в линию.В свою очередь, это может ограничить уровень электромагнитных помех продукта, нарушая определенные цели и нормы проектирования.
Эффективное обрабатываемое постоянное напряжение относительно высокое из-за удвоения входного напряжения.
Наконец, стоимость самой схемы удвоителя напряжения высока из-за двух мощных конденсаторов большой емкости.
Лучшим решением для минимизации этих проблем было бы использование трехфазного инверторного моста, как обсуждается в следующем разделе.
Вариант № 3: Использование трехфазного инверторного моста
Входная секция заменена на стандартный диодно-мостовой выпрямитель.В выходной секции установлен трехфазный инверторный мост. Основное отличие от предыдущей схемы — способ подключения обмоток двигателя к инвертору. Один конец основной и пусковой обмоток подключены к одному полумосту каждый. Остальные концы связываем вместе и подключаем к третьему полумосту.
| Управление с помощью трехфазного инверторного моста. |
При такой топологии привода управление становится более эффективным.Однако алгоритм управления усложняется. Напряжениями обмоток Va, Vb и Vc следует управлять для достижения разности фаз между эффективными напряжениями на основной и пусковой обмотках, чтобы сдвиг фаз между собой составлял 90 градусов.
Чтобы иметь одинаковые уровни напряжения и нагрузки на всех устройствах, что улучшает использование устройства и обеспечивает максимально возможное выходное напряжение для заданного напряжения на шине постоянного тока, все три фазных напряжения инвертора поддерживаются на одной и той же амплитуде, как указано в :
| Va | = | Vb | = | Vc |
Эффективное напряжение на основной и пусковой обмотках, как указано:
Vmain = Va-Vc
Vstart = Vb-Vc
Направление вращения можно легко контролировать с помощью фазового угла Vc относительно Va и Vb. .
На рисунках на странице 87 показаны фазные напряжения Va, Vb и Vc, эффективные напряжения на основной обмотке (Vmain) и пусковой обмотке (Vstart) для прямого и обратного направлений соответственно.
Использование метода управления трехфазным инвертором на компрессоре мощностью 300 Вт дало 30% экономии энергии по сравнению с первыми двумя методами.
| Требуемые ресурсы микроконтроллера | ||||
|---|---|---|---|---|
| Ресурс | Однонаправленный | Двунаправленный H-мост | Двунаправленный с трехфазным мостом | Банкноты |
| Программная память | 1.5 Кбайт | 2,0 Кбайт | 2,5 Кбайт | – |
| Память данных | ~ 20 байт | ~ 25 байтов | ~ 25 байт | – |
| ШИМ каналов | 2 канала | 2 канала | 3 канала | Дополняет мертвое время |
| Таймер | 1 | 1 | 1 | 8- или 16-битный |
| Аналого-цифровой преобразователь | 3-4 канала | 3-4 канала | 3-4 канала | Ток двигателя, измерения температуры, потенциометр регулировки скорости |
| Цифровые входы / выходы | от 3 до 4 | от 3 до 4 | от 3 до 4 | Для пользовательских интерфейсов, таких как переключатели и дисплеи |
| Входы неисправностей | 1 или 2 | 1 или 2 | 1 или 2 | Для перегрузки по току / перенапряжения / перегрева и т. Д. |
| Сложность алгоритма управления | Низкий | Средний | Высокая | – |
| Сравнение затрат | ||||
| Однонаправленный | Двунаправленный с H-мостом | Двунаправленный с трехфазным мостом | ||
| Секция входного преобразователя | Low — Однофазный диодный мостовой выпрямитель | Высокий — из-за цепи удвоителя напряжения | Low — Однофазный диодный мостовой выпрямитель | |
| Выходная секция инвертора | Низкий — Два полумоста | Средний — Два полумоста.Силовые выключатели на повышенное напряжение | High — трехфазный инвертор. Использование интегрированных силовых модулей (IPM) лучше, чем дискретных компонентов | |
| Двигатель | Medium — Требуется пусковой конденсатор | Low — Пусковой конденсатор снят с мотора | Low — Пусковой конденсатор снят с мотора | |
| Время разработки | Короткий | Средний | Длинный | |
| Общая стоимость | Низкий | Средний | Средний — Эффективный контроль при заданной стоимости | |
Еще одно преимущество использования метода трехфазного управления состоит в том, что та же самая топология приводного оборудования может использоваться для управления трехфазным асинхронным двигателем.В этом сценарии микроконтроллер должен быть перепрограммирован для вывода синусоидальных напряжений с фазовым сдвигом на 120 градусов относительно друг друга, что приводит в действие трехфазный асинхронный двигатель. Это сокращает время разработки.
Однофазные асинхронные двигатели очень популярны в бытовой технике, а также в промышленных и бытовых приложениях. PSC — самый популярный тип однофазных асинхронных двигателей. Управление скоростью двигателя имеет много преимуществ, таких как энергоэффективность, снижение слышимого шума и лучший контроль над приложением.В этой статье мы обсудили различные методы управления скоростью, которые можно использовать с двигателем PSC в однонаправленном и двунаправленном режимах. Наилучшие результаты дает управление двигателем PSC с использованием топологии трехфазного инвертора.
| |
| Фазное напряжение при вращении двигателя в прямом и обратном направлениях. |
triac — регулировка скорости асинхронного двигателя с помощью диммера
Причина, по которой это не сработало, кстати, заключается в том, что в асинхронном двигателе крутящий момент является коэффициентом соотношения между напряжением и частотой, а двигатель с короткозамкнутым ротором рассчитан на определенное соотношение.Таким образом, используя диммер, вы изменяете не частоту, а только напряжение, тем самым влияя на это соотношение. Крутящий момент двигателя изменяется пропорционально приложенному напряжению при фиксированной частоте, поэтому, если вы дадите этому двигателю 50% напряжения, он будет развивать только 25% от номинального крутящего момента. Это означает, что скольжение увеличивается, двигатель потребляет больше тока, пытаясь вернуться к нормальной скорости скольжения, но не может, поэтому дополнительный ток просто создает ненужное тепло, пока в конечном итоге двигатель не сгорит.
ЧРП работает, потому что он ДЕЙСТВИТЕЛЬНО изменяет напряжение И ЧАСТОТУ вместе, поддерживая соотношение В / Гц, ожидаемое двигателем, поэтому он обеспечивает номинальный крутящий момент на любой скорости.
Существуют частотно-регулируемые приводы, предназначенные для использования с однофазными двигателями, но не ВСЕХ однофазных двигателей. В отличие от трехфазных асинхронных двигателей, которые в основном построены одинаково, существует множество способов заставить работать однофазные асинхронные двигатели. Это связано с тем, что с однофазным двигателем не создается вращающееся магнитное поле, заставляющее двигатель вращаться, он просто вращается взад и вперед. Однако, как только двигатель НАЧИНАЕТ вращаться, он продолжает вращаться. Таким образом, однофазные двигатели должны быть спроектированы с использованием некоторого «трюка» для запуска этого вращения, обычно в форме временного фазового сдвига.Двигатели, которые используют отдельную обмотку (Split Phase) или конденсатор (Cap Start) для создания этого фазового сдвига, но затем используют центробежный переключатель, чтобы удалить его, когда двигатель вращается, нельзя использовать с какой-либо формой управления скоростью, потому что они замедляют их. посевной повторно включает метод запуска, и он не был разработан для постоянного использования в цепи. Однако есть две формы однофазного асинхронного двигателя, которые могут использоваться с регулированием скорости: постоянный разделенный конденсатор (поскольку колпачки предназначены для постоянного присутствия в цепи) и двигатель с экранированными полюсами.Двигатели с экранированными полюсами особенно хорошо подходят для простого управления напряжением с помощью «диммера», потому что крутящий момент в любом случае низкий, поэтому они обычно используются только в приложениях, которые не требуют большого крутящего момента, например, в небольших вентиляторах. Двигатели PSC также могут использоваться с диммерами, но проблема крутящего момента все еще существует, поэтому он очень зависит от нагрузки.
Итог: если у вас асинхронный двигатель, но не с экранированным полюсом или PSC, вы не можете использовать на нем какие-либо формы управления скоростью.
Регулятор скорости асинхронного двигателя PSC
Я так сделал —
Сторона постоянного тока:
(1) Малина 3, 3V3 GPIO
(2) транзистор 2N222, с резистором 220 Ом на затворе
(3) Твердотельное реле SSR 40 — DA
Сторона переменного тока:
(4) Двигатель PSC, 1 фаза, 0,35 А, 1,5 мФ
(5) индуктор с двойной дроссельной катушкой 2x 10 мГн
(6) Впуск с линейным фильтром 250 В перем. Тока, 10 А Шасси FBNAB2470ZG110
(1) Raspberry подает сигнал 3V3 на транзистор на затворе (подключение через резистор) Это открывает путь к сигналу 5 В от Raspberry к SRR обратно к контакту заземления Raspberry.
(2) Причина использования транзистора заключается в том, что сигнал 3V3 не дает достаточного тока для SSR. SSR запускается током 7,5 мА при 12 В. (http://www.fotek.com.hk/solid/SSR-1.htm)
(3) Когда SSR получал ток 5 В, он пропускал к двигателю ток 230 В.
(4) Теперь: когда мы позволяем мощности подпрыгивать вверх и вниз, двигатель начинает получать большие импульсы, что в принципе вредно как для вашего двигателя, так и для системы питания.
(5) Чтобы этого избежать, вы подключаете в линию дроссельную катушку — для выравнивания напряжения — больше: лучше.Катушки ручной работы тоже подойдут. Статор от другого двигателя работает отлично (фото).
(6) Аналогичным образом помогает линейный фильтр. Вы можете купить его или с помощью простого конденсатора [схема] соединить L и N.
Будьте осторожны и получайте удовольствие!
#! / Usr / bin / env python
# - * - кодировка: utf-8 - * -
время импорта
импортировать RPi.GPIO как GPIO
пытаться:
в то время как True:
# Использовать ссылки BCM GPIO
# вместо физических номеров контактов
GPIO.setmode (GPIO.BCM)
# Определить GPIO для использования на Pi
GPIO_RELAY_1 = 12
# Установить контакты как выход и вход
GPIO.setup (GPIO_RELAY_1, GPIO.OUT) # RELAY_1
# Установить триггер на False (Low)
GPIO.output (GPIO_RELAY_1, ложь)
# Разрешить модулю урегулировать
time.sleep (0,1)
# Отправить импульс 10us для запуска
GPIO.output (GPIO_RELAY_1, True)
распечатать "RELAY_1 ON"
time.sleep (0,5)
GPIO.output (GPIO_RELAY_1, ложь)
распечатать "RELAY_1 OFF"
время.сон (0,2)
# Сбросить настройки GPIO
GPIO.cleanup ()
кроме KeyboardInterrupt:
проходить
GPIO.output (GPIO_RELAY_1, ложь)
напечатать "Finito: Off"
GPIO.cleanup ()
https://sourceforge.net/p/raspberry-gpio-python/wiki/PWM/
импортное время
импортировать RPi.GPIO как GPIO
GPIO.setmode (GPIO.BCM)
GPIO.setup (12, GPIO.OUT)
частота = 500
dc_low = 40
dc_mid = 75
dc_high = 100
p = GPIO.PWM (12, частота) # GPIO.PWM (канал, частота (в Гц)
p.start (0)
пытаться:
а 1:
печать "частота =", частота
#dc_low
п.ChangeDutyCycle (dc_low)
печать "dc_low =", dc_low
время сна (120)
#dc_mid
p.ChangeDutyCycle (dc_mid)
печать "dc_mid =", dc_mid
время сна (120)
p.ChangeDutyCycle (dc_mid)
печать "dc_high =", dc_high
время сна (120)
"" "
для постоянного тока в диапазоне (0, 101, 5):
p.ChangeDutyCycle (dc)
time.sleep (0,1)
print "dc in range (0, 101, 5) =", dc
print "freqnecy =", частота
для постоянного тока в диапазоне (100, -1, -5):
п.ChangeDutyCycle (dc)
print "dc in range (100, -1, -5) =", dc
print "freqnecy =", частота
time.sleep (0,1)
"" "
кроме KeyboardInterrupt:
проходить
p.stop ()
GPIO.cleanup ()
Двигатели переменного тока, контроллеры и частотно-регулируемые приводы
Что такое двигатель переменного тока?
Основы электродвигателя переменного тока
Стандартное определение двигателя переменного тока — это электродвигатель, приводимый в действие переменным током.Двигатель переменного тока используется для преобразования электрической энергии в механическую. Эта механическая энергия создается за счет использования силы, создаваемой вращающимися магнитными полями, создаваемыми переменным током, протекающим через его катушки. Двигатель переменного тока состоит из двух основных компонентов: стационарного статора, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутреннего ротора, который прикреплен к выходному валу.
Как работает двигатель переменного тока?
Основная работа двигателя переменного тока основана на принципах магнетизма.Простой двигатель переменного тока содержит катушку с проводом и два фиксированных магнита, окружающих вал. Когда электрический заряд (переменного тока) прикладывается к катушке с проволокой, она становится электромагнитом, генерирующим магнитное поле. Проще говоря, когда магниты взаимодействуют, вал и катушка проводов начинают вращаться, приводя в движение двигатель.
Обратная связь двигателя переменного тока
У двигателей переменного токаесть два варианта управления с обратной связью. Эти опции представляют собой преобразователь двигателя переменного тока или энкодер двигателя переменного тока.И резольвер двигателя переменного тока, и энкодер двигателя переменного тока могут определять направление, скорость и положение выходного вала. Хотя и преобразователь двигателя переменного тока, и энкодер двигателя переменного тока предлагают одно и то же решение для различных приложений, они сильно различаются.
Резольверы двигателей переменного тока используют второй набор катушек статора, называемый трансформатором, для создания напряжения на роторе через воздушный зазор. Поскольку в резольвере отсутствуют электронные компоненты, он очень прочный и работает в широком диапазоне температур. Резольвер двигателя переменного тока также естественно устойчив к ударам благодаря своей конструкции.Резольвер часто используется в суровых условиях.
В оптическом кодировщике электродвигателя переменного тока используется затвор, который вращается для прерывания луча света, проходящего через воздушный зазор между источником света и фотодетектором. Вращение заслонки со временем вызывает износ энкодера. Этот износ снижает долговечность и надежность оптического кодировщика.
Тип приложения определяет, нужен ли преобразователь или кодировщик. Энкодеры двигателей переменного тока проще в реализации и более точны, поэтому они должны быть основным приоритетом для любого приложения.Резолвер следует выбирать только в том случае, если этого требует среда, в которой он будет использоваться.
Основные типы электродвигателей переменного тока
Электродвигатель переменного тока бывает трех различных типов: индукционный, синхронный и промышленный. Эти типы двигателей переменного тока определяются конструкцией ротора, используемого в конструкции. В линейке продуктов Anaheim Automation представлены все три типа.
Асинхронный двигатель переменного тока
Асинхронные двигатели переменного тока называются асинхронными двигателями или вращающимися трансформаторами.Этот тип двигателя переменного тока использует электромагнитную индукцию для питания вращающегося устройства, которым обычно является вал. Ротор в асинхронных двигателях переменного тока обычно вращается медленнее, чем его частота. Наведенный ток — это то, что вызывает магнитное поле, окружающее ротор этих двигателей. Этот асинхронный двигатель переменного тока имеет одну или три фазы.
Синхронный двигатель переменного тока
Синхронный двигатель обычно представляет собой двигатель переменного тока, ротор которого вращается с той же скоростью, что и переменный ток, который к нему подается.Ротор также может вращаться со скоростью, кратной величине подаваемого на него тока. Контактные кольца или постоянный магнит, на который подается ток, создают магнитное поле вокруг ротора.
Промышленный двигатель переменного тока
Промышленные двигатели переменного тока разработаны для применений, требующих трехфазного асинхронного двигателя большой мощности. Номинальная мощность промышленного двигателя превышает номинальную мощность стандартного однофазного асинхронного двигателя переменного тока. Anaheim Automation предлагает промышленные электродвигатели переменного тока мощностью от 220 до 2200 Вт в трехфазном режиме при 220 или 380 В переменного тока.
Где используются двигатели переменного тока?
В каких отраслях используются двигатели переменного тока?
Асинхронные двигатели в основном используются в быту из-за их относительно низких производственных затрат и долговечности, но также широко используются в промышленных приложениях.
Для чего используются двигатели переменного тока?
Двигатели переменного тока можно найти во многих бытовых приборах и приложениях, в том числе:
— Часы
— Электроинструменты
— Дисковые накопители
— Стиральные машины и другая бытовая техника
— Аудиопроигрыватели
— Вентиляторы
Их также можно найти в промышленности:
— насосы
— нагнетатели
— конвейеры
— компрессоры
Как управляются двигатели переменного тока?
Контроллеры переменного тока:
Основы
Контроллер переменного тока (иногда называемый драйвером) известен как устройство, которое контролирует скорость двигателя переменного тока.Контроллер переменного тока может также называться частотно-регулируемым приводом, приводом с регулируемой скоростью, преобразователем частоты и т. Д. Двигатель переменного тока получает мощность, которая в конечном итоге преобразуется контроллером переменного тока в регулируемую частоту. Этот регулируемый выход позволяет точно контролировать скорость двигателя.
Компоненты контроллера переменного тока
Обычно контроллер переменного тока состоит из трех основных частей: выпрямителя, инвертора и звена постоянного тока для их соединения.Выпрямитель преобразует входной переменный ток в постоянный ток (постоянный ток), а инвертор переключает постоянное напряжение на выходное переменное напряжение с регулируемой частотой. Инвертор также можно использовать для управления выходным током, если это необходимо. И выпрямитель, и инвертор управляются набором элементов управления для генерации определенного количества переменного напряжения и частоты, чтобы соответствовать системе двигателя переменного тока в данный момент времени.
Приложения
Контроллер переменного тока может использоваться во многих различных промышленных и коммерческих приложениях.Контроллер переменного тока, который чаще всего используется для управления вентиляторами в системах кондиционирования и отопления, позволяет лучше контролировать воздушный поток. Контроллер переменного тока также помогает регулировать скорость насосов и воздуходувок. В последнее время применяются конвейеры, краны и подъемники, станки, экструдеры, линии для производства пленки и прядильные машины для текстильного волокна.
Преимущества и недостатки
Преимущества
— Увеличивает срок службы двигателя за счет высокого коэффициента мощности
— Экономичное регулирование скорости
— Оптимизация пусковых характеристик двигателя
— Более низкие затраты на обслуживание, чем при управлении постоянным током
Недостатки
— Генерирует большое количество тепла и гармоник
История
Никола Тесла изобрел первый асинхронный двигатель переменного тока в 1888 году, представив более надежный и эффективный двигатель, чем двигатель постоянного тока.Однако регулирование скорости переменного тока было сложной задачей. Когда требовалось точное управление скоростью, двигатель постоянного тока стал заменой двигателя переменного тока из-за его эффективных и экономичных средств точного управления скоростью. Только в 1980-х годах регулятор скорости переменного тока стал конкурентом. Со временем технология привода переменного тока в конечном итоге превратилась в недорогого и надежного конкурента традиционному управлению постоянным током. Теперь контроллер переменного тока может управлять скоростью с полным крутящим моментом, достигаемым от 0 об / мин до максимальной номинальной скорости.
Частотно-регулируемые приводы
Основы
Частотно-регулируемый привод — это особый тип привода с регулируемой скоростью, который используется для управления скоростью двигателя переменного тока. Чтобы управлять скоростью вращения двигателя, частотно-регулируемый привод регулирует частоту подаваемой на него электроэнергии. Добавление частотно-регулируемого привода к приложению позволяет регулировать скорость двигателя в соответствии с его нагрузкой, что в конечном итоге позволяет экономить энергию.Частотно-регулируемый привод, обычно используемый во множестве приложений, можно найти в системах вентиляции, насосах, конвейерах и приводах станков.
Как работает частотно-регулируемый привод
Когда полное напряжение подается на двигатель переменного тока, он сначала ускоряет нагрузку и снижает крутящий момент, сохраняя ток особенно высоким, пока двигатель не достигнет полной скорости. Частотно-регулируемый привод работает иначе; он устраняет чрезмерный ток, контролируемое повышение напряжения и частоты при запуске двигателя.Это позволяет двигателю переменного тока генерировать до 150% от номинального крутящего момента, который потенциально может быть создан с самого начала, вплоть до полной скорости, без потерь энергии. Частотно-регулируемый привод преобразует мощность через три различных этапа. Сначала мощность переменного тока преобразуется в мощность постоянного тока, после чего включаются и выключаются силовые транзисторы, вызывая форму волны напряжения на желаемой частоте. Эта форма сигнала затем регулирует выходное напряжение в соответствии с предпочтительным обозначенным значением.
Физические свойства
Обычно система частотно-регулируемого привода включает двигатель переменного тока, контроллер и интерфейс оператора.Трехфазный асинхронный двигатель чаще всего применяется в частотно-регулируемом приводе, поскольку он обеспечивает универсальность и экономичность по сравнению с однофазным или синхронным двигателем. Хотя в некоторых случаях они могут быть полезными, в системе частотно-регулируемого привода часто используются двигатели, предназначенные для работы с фиксированной скоростью.
Интерфейсы оператора частотно-регулируемого привода позволяют пользователю регулировать рабочую скорость, а также запускать и останавливать двигатель. Интерфейс оператора может также позволить пользователю переключаться и реверсировать между автоматическим управлением или ручным регулированием скорости.
Преимущества частотно-регулируемого привода
— Температуру технологического процесса можно контролировать без отдельного контроллера
— Низкие затраты на обслуживание
— Более длительный срок службы двигателя переменного тока и другого оборудования
— Более низкие эксплуатационные расходы
— Оборудование в системе, с которым невозможно справиться защита от чрезмерного крутящего момента
Типы частотно-регулируемых приводов
Существует три распространенных частотно-регулируемых привода (VFD), которые обладают как преимуществами, так и недостатками в зависимости от приложения, для которого они используются.Три распространенных конструкции ЧРП включают: инвертор источника тока (CSI), инвертор источника напряжения (VSI) и широтно-импульсную модуляцию (ШИМ). Однако существует четвертый тип частотно-регулируемого привода, называемый векторным приводом потока, который становится все более популярным среди конечных пользователей благодаря своей функции управления с обратной связью. Каждый частотно-регулируемый привод состоит из преобразователя, звена постоянного тока и инвертора, но конструкция каждого из них зависит от привода. Хотя секции каждого частотно-регулируемого привода похожи, они требуют изменения схемы в том, как они подают частоту и напряжение на двигатель.
Инвертор источника тока (CSI)
Инвертор источника тока (CSI) — это тип преобразователя частоты (VFD), который преобразует входящее напряжение переменного тока и изменяет частоту и напряжение, подаваемое на асинхронный двигатель переменного тока. Общая конфигурация этого типа частотно-регулируемого привода аналогична конфигурации других частотно-регулируемых приводов в том, что он состоит из преобразователя, звена постоянного тока и инвертора. В преобразовательной части CSI используются кремниевые выпрямители (SCR), тиристоры с коммутацией затвора (GCT) или симметричные тиристоры с коммутацией затвора (SGCT) для преобразования входящего переменного напряжения в переменное постоянное напряжение.Для поддержания правильного соотношения напряжения и частоты (Вольт / Герц) напряжение должно регулироваться путем правильной последовательности SCR. В звене постоянного тока для этого типа частотно-регулируемого привода используется индуктор для регулирования пульсаций тока и для хранения энергии, используемой двигателем. Инвертор, который отвечает за преобразование постоянного напряжения обратно в синусоидальную форму сигнала переменного тока, состоит из SCRS, тиристоров отключения затвора (GTO) или симметричных тиристоров с коммутацией затвора (SGCT). Эти тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выхода с широтно-импульсной модуляцией (ШИМ), который регулирует частоту и напряжение на двигателе.Частотно-регулируемые приводы CSI регулируют ток, для работы требуется большой внутренний индуктор и нагрузка двигателя. Важным примечанием к конструкциям ЧРП CSI является требование входных и выходных фильтров, которые необходимы из-за высоких гармоник на входе мощности и низкого коэффициента мощности. Чтобы обойти эту проблему, многие производители используют либо входные трансформаторы, либо реакторы и фильтры гармоник в точке общего соединения (электрическая система пользователя, подключенная к приводу), чтобы уменьшить влияние гармоник на систему привода.Из обычных приводных систем с частотно-регулируемым приводом, частотно-регулируемые приводы CSI являются единственным типом приводов, которые имеют возможность рекуперации энергии. Возможность рекуперации энергии означает, что мощность, передаваемая от двигателя обратно к источнику питания, может быть поглощена.
Преимущества CSI
• Возможность рекуперации энергии
• Простая схема
• Надежность (операция ограничения тока)
• Чистая форма кривой тока
Недостатки CSI
• Зубцы двигателя, когда выходная частота ШИМ ниже 6 Гц
• Используемые индукторы большие и дорогостоящие
• Генерация больших гармоник мощности отправляется обратно в источник питания
• Зависит от нагрузки двигателя
• Низкий коэффициент входной мощности
Инвертор источника напряжения (VSI)
Секция преобразователя VSI аналогична секции преобразователя CSI в том, что входящее напряжение переменного тока преобразуется в напряжение постоянного тока.Отличие от секции преобразователя CSI и VSI заключается в том, что VSI использует выпрямитель на диодном мосту для преобразования напряжения переменного тока в напряжение постоянного тока. В звене постоянного тока VSI используются конденсаторы для сглаживания пульсаций постоянного напряжения, а также для хранения энергии для системы привода. Секция инвертора состоит из биполярных транзисторов с изолированным затвором (IGBT), тиристоров с изолированным затвором (IGCT) или транзисторов с инжекционным затвором (IEGT). Эти транзисторы или тиристоры ведут себя как переключатели, которые включаются и выключаются для создания выходного сигнала широтно-импульсной модуляции (ШИМ), который регулирует частоту и напряжение на двигателе.
Преимущества VSI
• Простая схема
• Может использоваться в приложениях, требующих нескольких двигателей
• Не зависит от нагрузки
Недостатки VSI
• Генерация больших гармоник мощности в источнике питания
• Зубчатая передача двигателя, когда выходная частота ШИМ ниже 6 Гц
• Безрегенеративный режим
• Низкий коэффициент мощности
Широтно-импульсная модуляция (ШИМ)
Частотно-регулируемый привод с широтно-импульсной модуляцией (ШИМ) является одним из наиболее часто используемых контроллеров и доказал свою эффективность с двигателями мощностью от 1/2 до 500 л.с.Большинство частотно-регулируемых приводов с ШИМ рассчитаны на работу в трехфазном режиме 230 В или 460 В и обеспечивают выходные частоты в диапазоне 2–400 Гц. Как и VSI VFD, PWM VFD использует выпрямитель на диодном мосту для преобразования входящего переменного напряжения в постоянное. В звене постоянного тока используются конденсаторы большой емкости для устранения пульсаций после выпрямителя и создания стабильного напряжения на шине постоянного тока. Шестиступенчатый инверторный каскад этого драйвера использует IGBT высокой мощности, которые включаются и выключаются для регулирования частоты и напряжения двигателя. Эти транзисторы управляются микропроцессором или ИС двигателя, который контролирует различные аспекты привода, чтобы обеспечить правильную последовательность.В результате на двигатель выводится сигнал синусоидальной формы. Так как же включение и выключение транзистора помогает создать синусоидальный выходной сигнал? Изменяя ширину импульса напряжения, вы получаете среднюю мощность, которая представляет собой напряжение, подаваемое на двигатель. Частота, подаваемая на двигатель, определяется количеством переходов из положительного положения в отрицательное в секунду.
Преимущество ШИМ
• Отсутствие зубчатого зацепления двигателя
• КПД от 92% до 96%
• Превосходный коэффициент входной мощности благодаря фиксированному напряжению шины постоянного тока
• Низкая начальная стоимость
• Может использоваться в приложениях, требующих нескольких двигателей
Недостатки ШИМ
• Безрегенеративный режим
• Высокочастотное переключение может вызвать нагрев двигателя и пробой изоляции.
Как выбрать двигатель переменного тока
Чтобы выбрать подходящий двигатель переменного тока для конкретного применения, необходимо определить основные характеристики.Рассчитайте требуемый момент нагрузки и рабочую скорость. Помните, что асинхронные и реверсивные двигатели нельзя регулировать; они требуют редуктора. Если это необходимо, выберите подходящее передаточное число. Затем определите частоту и напряжение питания двигателя.
Преимущества и недостатки
Преимущества двигателя переменного тока
— Низкая стоимость
— Длительный срок службы
— Высокая эффективность и надежность
— Простая конструкция
— Высокий пусковой крутящий момент (индукция)
— Отсутствие проскальзывания (синхронное)
Недостатки двигателя переменного тока
— Частота вызывает проскальзывание при вращении (индукция)
— Необходим пусковой выключатель (индукция)
Поиск и устранение неисправностей двигателя переменного тока
ПОЖАЛУЙСТА, ОБРАТИТЕ ВНИМАНИЕ: Техническая помощь по линейке продуктов AC Motor, а также по всем продуктам, производимым или распространяемым Anaheim Automation, предоставляется бесплатно.Эта помощь предлагается, чтобы помочь клиенту в выборе продуктов Anaheim Automation для конкретного применения. Во всех случаях ответственность за определение пригодности индивидуального двигателя переменного тока для конкретной конструкции системы лежит исключительно на заказчике. Несмотря на то, что мы прилагаем все усилия, чтобы предложить надежные рекомендации относительно линейки двигателей переменного тока, а также других продуктов для управления движением, а также для точного создания технических данных и иллюстраций, такие советы и документы предназначены только для справки и могут быть изменены без предварительного уведомления.
Для устранения неполадок в системе двигателя и контроллера переменного тока могут быть предприняты следующие шаги:
Шаг 1: Проверьте запах двигателя. При появлении запаха гари немедленно замените двигатель.
Шаг 2: Проверьте входное напряжение двигателя. Убедитесь, что провода не повреждены и подключен надлежащий источник питания.
Шаг 3: Прислушайтесь к громкой вибрации или скрипу. Такие шумы могут указывать на повреждение или износ подшипников. По возможности смажьте подшипники, в противном случае замените двигатель полностью.
Шаг 4: Проверить на перегрев. С помощью сжатого воздуха очистите двигатель от мусора, дайте ему остыть и перезапустите.
Шаг 5: Двигатели переменного тока, которые пытаются запустить, но выходят из строя, могут быть признаком плохого пускового конденсатора. Проверьте наличие каких-либо признаков утечки масла и замените конденсатор, если это так.
Шаг 6: Убедитесь, что приложение, в котором вращается двигатель, не заблокировано. Для этого отсоедините механизм и попробуйте запустить двигатель самостоятельно.
Сколько стоят изделия с электродвигателями переменного тока?
Электродвигатель переменного тока может быть разумным экономичным решением для ваших требований. Конструкционные материалы и конструкция двигателя делают системы двигателей переменного тока доступным решением. Двигатель переменного тока работает с вращающимся магнитным полем и не использует щеток. Это позволяет снизить стоимость двигателя и исключает компонент, который может со временем изнашиваться. Для работы двигателей переменного тока не требуется драйвер.Это экономит начальные затраты на установку. Сегодняшние производственные процессы делают производство двигателей переменного тока проще и быстрее, чем когда-либо. Статор изготовлен из тонких пластин, которые можно прессовать или штамповать на станке с ЧПУ. Многие другие детали можно быстро изготовить и усовершенствовать, сэкономив время и деньги! Anaheim Automation предлагает на выбор полную линейку продукции для двигателей переменного тока.
Физические свойства двигателя переменного тока
Обычно двигатель переменного тока состоит из двух основных компонентов: статора и ротора.Статор — это неподвижная часть двигателя, состоящая из нескольких тонких пластин, намотанных изолированным проводом, образующих сердечник.
Ротор соединен с выходным валом изнутри. Наиболее распространенным типом ротора, используемого в двигателях переменного тока, является ротор с короткозамкнутым ротором, названный в честь его сходства с колесами для упражнений на грызунах.
Статор устанавливается внутри кожуха двигателя, ротор установлен внутри, и между ними имеется зазор, разделяющий их от соприкосновения друг с другом. Кожух представляет собой станину двигателя, содержащую два подшипниковых узла.
Формулы для двигателя переменного тока
Синхронная скорость:
Частота:
Количество полюсов:
Мощность в лошадиных силах:
Пробуксовка двигателя:
Глоссарий двигателей переменного тока
Двигатель переменного тока — Электродвигатель, приводимый в действие переменным током, а не постоянным.
Переменный ток — Электрический заряд, который часто меняет направление (противоположно постоянному току, с зарядом только в одном направлении).
Центробежный переключатель — Электрический переключатель, который регулирует скорость вращения вала, работая за счет центробежной силы, создаваемой самим валом.
Передаточное число — Передаточное число, при котором скорость двигателя уменьшается редуктором. Скорость на выходном валу равна 1 передаточному числу x скорость двигателя.
Инвертор — Устройство, преобразующее постоянный ток в переменный. Реверс выпрямителя.
Асинхронный двигатель — Может упоминаться как асинхронный двигатель; тип двигателя переменного тока, в котором электромагнитная индукция питает ротор. Для создания крутящего момента требуется скольжение.
Скорость холостого хода — Обычно ниже синхронной скорости, это скорость, когда двигатель не несет нагрузки.
Номинальная скорость — Скорость двигателя при номинальной выходной мощности.Обычно самая востребованная скорость.
Выпрямитель — Устройство, преобразующее переменный ток в постоянный в двигателе. Они могут использоваться в качестве компонента источника питания или могут обнаруживать радиосигналы. Обычно выпрямители могут состоять из твердотельных диодов, ртутных дуговых клапанов или других веществ. Реверс инвертора.
Выпрямление — Процесс преобразования переменного тока в постоянный с помощью выпрямителя в двигателе переменного тока.
Асинхронный двигатель с разделенной фазой — Двигатели, которые могут создавать больший пусковой крутящий момент за счет использования центробежного переключателя в сочетании со специальной пусковой обмоткой.
Крутящий момент при остановке — Максимальный крутящий момент, с которым двигатель может работать, при определенном напряжении и частоте. Превышение этого количества приведет к остановке двигателя.
Пусковой крутящий момент — крутящий момент, который мгновенно создается при запуске двигателя. Двигатель не будет работать, если нагрузка трения превышает крутящий момент.
Статический момент трения — Когда двигатель останавливается, например, тормозом, это выходной крутящий момент, необходимый для удержания нагрузки при остановке двигателя.
Синхронный двигатель — В отличие от асинхронного двигателя, он может создавать крутящий момент с синхронной скоростью без скольжения.
Синхронная скорость — Обозначается скоростью в минуту, это внутренний фактор, определяемый количеством полюсов и частотой сети.
Привод с регулируемой скоростью — Оборудование, используемое для управления частотой электроэнергии, подаваемой на двигатель переменного тока, с целью управления его скоростью вращения.
Блок-схема для систем, в которых используется двигатель переменного тока
Срок службы двигателя переменного тока
Двигатели переменного токаAnaheim Automation обычно имеют срок службы около 10 000 часов работы, при условии, что двигатели работают в надлежащих условиях и в соответствии со спецификациями.
Необходимое обслуживание двигателя переменного тока
Профилактическое обслуживание — ключ к долговечной системе электродвигателя переменного тока.Следует проводить плановую проверку. Всегда проверяйте двигатель переменного тока на предмет загрязнения и коррозии. Грязь и мусор могут закупорить воздушные каналы и уменьшить поток воздуха, что в конечном итоге приведет к сокращению срока службы изоляции и возможному отказу двигателя. Если мусор не виден явно, убедитесь, что поток воздуха постоянный и не слабый. Это также может указывать на засорение. Во влажной, влажной или влажной среде проверьте клеммы в распределительной коробке на предмет коррозии и при необходимости отремонтируйте.
Прислушайтесь к чрезмерному шуму или вибрации и почувствуйте чрезмерное тепло.Это может указывать на необходимость смазки подшипников. Примечание: Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потоком воздуха маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Примечание. Будьте осторожны при смазке подшипников, так как чрезмерная смазка может привести к загрязнению и засорению потока масла маслом. Обязательно найдите и удалите источник тепла для двигателя, чтобы избежать отказа системы.
Электропроводка двигателя переменного тока
Следующая информация предназначена в качестве общего руководства для электромонтажа линейки двигателей переменного тока Anaheim Automation. Имейте в виду, что при прокладке силовой и сигнальной проводки на машине или системе излучаемый шум от близлежащих реле, трансформаторов и других электронных устройств может индуцироваться в двигателе переменного тока и сигналах энкодера, каналах ввода / вывода и других чувствительных низковольтных устройствах. сигналы. Это может вызвать сбои в системе.
ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть. Соблюдайте особую осторожность при обращении, подключении, тестировании и регулировке во время установки, настройки, настройки и эксплуатации. Не делайте чрезмерных корректировок или изменений в параметрах системы двигателя переменного тока, которые могут вызвать механическую вибрацию и привести к поломке и / или потерям. После того, как система электродвигателя переменного тока подключена, не запускайте ее путем прямого включения / выключения источника питания. Частое включение / выключение питания приведет к быстрому старению компонентов системы, что сократит срок службы системы электродвигателя переменного тока.
Строго соблюдайте следующие правила:
• Следуйте схеме подключения к каждому двигателю переменного тока и / или контроллеру.
• Прокладывайте силовые кабели высокого напряжения отдельно от силовых кабелей низкого напряжения.
• Отделите входную силовую проводку и силовые кабели двигателя переменного тока от проводки управления и кабелей обратной связи двигателя. Сохраняйте это разделение на всем протяжении провода.
• Используйте экранированный кабель для силовой проводки и обеспечьте заземленный зажим на 360 градусов к стене корпуса.Оставьте на вспомогательной панели место для изгибов проводов.
• Сделайте все кабельные трассы как можно короче.
• Обеспечьте достаточный воздушный поток
• Сохраняйте окружающую среду как можно более чистой
ПРИМЕЧАНИЕ: Кабели заводского изготовления рекомендуются для использования в наших системах двигателей переменного тока. Эти кабели приобретаются отдельно и предназначены для минимизации электромагнитных помех. Эти кабели рекомендуется использовать вместо кабелей, изготовленных заказчиком, чтобы оптимизировать работу системы и обеспечить дополнительную безопасность для системы электродвигателя переменного тока, а также для пользователя.
ПРЕДУПРЕЖДЕНИЕ — Во избежание поражения электрическим током выполните все монтажные и электромонтажные работы двигателя переменного тока перед подачей питания. После подачи питания на соединительные клеммы может присутствовать напряжение.
Монтаж двигателя переменного тока
Следующая информация предназначена в качестве общего руководства по установке и монтажу системы электродвигателя переменного тока. ПРЕДУПРЕЖДЕНИЕ — В системе двигателя переменного тока может присутствовать опасное напряжение, способное вызвать травму или смерть.Соблюдайте особую осторожность при обращении, тестировании и регулировке во время установки, настройки и эксплуатации. При установке и монтаже очень важно учитывать проводку двигателя переменного тока. Субпанели, устанавливаемые внутри корпуса для монтажа компонентов системы, должны иметь плоскую жесткую поверхность, защищенную от ударов, вибрации, влаги, масла, паров или пыли. Помните, что двигатель переменного тока выделяет тепло во время работы; поэтому при проектировании системы следует учитывать рассеивание тепла.Размер корпуса не должен превышать максимально допустимую температуру окружающей среды. Рекомендуется устанавливать двигатель переменного тока в положение, обеспечивающее достаточный воздушный поток. Электродвигатель переменного тока должен быть устойчиво закреплен и надежно закреплен.
ПРИМЕЧАНИЕ: Между электродвигателем переменного тока и любыми другими устройствами, установленными в системе / электрической панели или шкафу, должно быть не менее 10 мм.
Чтобы соответствовать требованиям UL и CE, система электродвигателя переменного тока должна быть заземлена в заземленном проводящем корпусе, обеспечивающем защиту, как определено в стандарте EN 60529 (IEC 529) до IP55, таким образом, чтобы они были недоступны для оператора или неквалифицированного лица. .Как и любую движущуюся часть системы, двигатель переменного тока следует держать вне досягаемости оператора. Корпус NEMA 4X превосходит эти требования, обеспечивая степень защиты IP66. Чтобы улучшить соединение между шиной питания и субпанелью, сделайте субпанель из оцинкованной (не содержащей краски) стали. Кроме того, настоятельно рекомендуется защитить систему электродвигателя переменного тока от электрических помех. Шум от сигнальных проводов может вызвать механическую вибрацию и неисправности.
Экологические аспекты двигателя переменного тока
Следующие меры по охране окружающей среды и безопасности должны соблюдаться на всех этапах эксплуатации, обслуживания и ремонта системы электродвигателя переменного тока.Несоблюдение этих мер предосторожности нарушает стандарты безопасности при проектировании, производстве и предполагаемом использовании двигателя переменного тока. Обратите внимание, что даже правильно построенная система электродвигателя переменного тока, неправильно установленная и эксплуатируемая, может быть опасной. Пользователь должен соблюдать меры предосторожности в отношении нагрузки и условий эксплуатации. В конечном итоге заказчик несет ответственность за правильный выбор, установку и работу двигателя переменного тока и / или регулятора скорости.
Атмосфера, в которой используется двигатель переменного тока, должна способствовать соблюдению общих правил работы с электрическим / электронным оборудованием.Не эксплуатируйте систему электродвигателя переменного тока в присутствии легковоспламеняющихся газов, пыли, масла, пара или влаги. При использовании вне помещений двигатель переменного тока должен быть защищен от атмосферных воздействий соответствующей крышкой, обеспечивая при этом достаточный поток воздуха и охлаждение. Влага может вызвать опасность поражения электрическим током и / или вызвать поломку системы. Следует уделять должное внимание недопущению попадания любых жидкостей и паров. Свяжитесь с заводом-изготовителем, если для вашего приложения требуются определенные степени защиты IP. Разумно устанавливать двигатель переменного тока в среде, свободной от конденсации, электрических шумов, вибрации и ударов.
Кроме того, предпочтительно работать с системой электродвигателя переменного тока в нестатической защитной среде. Открытые цепи всегда должны быть надлежащим образом ограждены и / или закрыты для предотвращения несанкционированного контакта человека с цепями под напряжением. Запрещается выполнять какие-либо работы при включенном питании.
НЕ подключайте и не отключайте питание при включенном питании. После выключения питания подождите не менее 5 минут, прежде чем проводить инспекционные работы в системе двигателя переменного тока, потому что даже после отключения питания в конденсаторах внутренней цепи системы двигателя переменного тока будет оставаться некоторая электрическая энергия.
Спланируйте установку двигателя переменного тока в конструкции системы, свободной от мусора, такого как металлический мусор от резки, сверления, нарезания резьбы и сварки, или любого другого постороннего материала, который может контактировать с схемами системы. Если не предотвратить попадание мусора в систему двигателя переменного тока, это может привести к повреждению и / или поражению электрическим током.
История электродвигателя переменного тока
Изобретение двигателя переменного тока
Асинхронные двигатели переменного тока используются в отрасли уже более 20 лет.Идея двигателя переменного тока возникла у Николы Теслы в 1880-х годах. Никола Тесла заявил, что двигателям не нужны щетки для переключения ротора. Он сказал, что они могут быть вызваны вращающимся магнитным полем. Никола Тесла обнаружил использование переменного тока, который индуцирует вращающиеся магнитные поля. Тесла подал патент США номер 416194 на работу над двигателем переменного тока. Этот тип двигателя сегодня мы называем асинхронным двигателем переменного тока.
Эволюция электродвигателя переменного тока
Электродвигатель переменного тока сделал себе имя благодаря простой конструкции, простоте использования, прочной конструкции и рентабельности для множества различных применений.Достижения в области технологий позволили производителям развить идею Telsa и обеспечили большую гибкость в регулировании скорости асинхронного двигателя переменного тока. От простого фазового управления до более надежных систем с обратной связью, использующих векторно-ориентированное управление полем; Двигатель переменного тока усовершенствовался за последние сто двадцать лет.
Принадлежности для двигателей переменного тока
Для двигателя переменного тока существует широкий выбор принадлежностей. Доступные аксессуары включают тормоз, сцепление, вентилятор, разъем и кабели. Дополнительные сведения и варианты см. На странице «Аксессуары» Anaheim Automation.
Тормоза двигателя переменного тока представляют собой систему 24 В постоянного тока. Эти тормоза идеально подходят для любых удерживающих устройств, которые вы можете использовать с электродвигателем переменного тока. Тормоза электродвигателя переменного тока имеют низковольтную конструкцию для приложений, которые подвержены разряду батареи, потере энергии или длинной проводке.
Муфта двигателя переменного тока используется для управления крутящим моментом, прилагаемым к нагрузке. Муфту двигателя переменного тока также можно использовать для увеличения скорости нагрузки с высоким моментом инерции.Муфты идеально подходят для использования с электродвигателем переменного тока, когда вы хотите точно контролировать крутящий момент или медленно прикладывать мощность. Муфты электродвигателя переменного тока также помогают предотвратить резкие скачки тока.
Вентиляторы двигателя переменного тока используются для охлаждения двигателей. Обычно они не встречаются в небольших двигателях, потому что они не нужны, но чаще встречаются в более крупных асинхронных двигателях переменного тока из-за тепловыделения. Есть два типа вентиляторов, которые используются для двигателя переменного тока. Типы бывают внутренние и внешние вентиляторы. Вентиляторы электродвигателей переменного тока идеально подходят для использования, когда возникает проблема перегрева.
Кабели двигателя переменного тока могут быть изготовлены по индивидуальному заказу с поставляемым разъемом двигателя переменного тока в соответствии с заданными спецификациями. Кабели также можно приобрести в компании Anaheim Automation.
Если двигатели переменного тока не идеальны для вашего применения, вы можете рассмотреть бесщеточные двигатели постоянного тока, щеточные двигатели постоянного тока, сервоприводы или шаговые двигатели и их совместимые драйверы / контроллеры. Наряду с двигателями переменного тока Anaheim Automation предлагает коробки передач и регуляторы скорости. Дополнительные продукты Anaheim Automation предлагает: энкодеры, HMI, муфты, кабели и соединители, линейные направляющие.
Настройка двигателя переменного тока
Anaheim Automation была основана в 1966 году как производитель систем управления перемещением «под ключ». Его акцент на исследованиях и разработках обеспечил постоянное внедрение передовых продуктов управления движением, таких как линейка продуктов AC Motor. Сегодня Anaheim Automation занимает высокое место среди ведущих производителей и дистрибьюторов продукции для управления движением, и это положение усиливается ее отличной репутацией в области качественной продукции по конкурентоспособным ценам.Линия продуктов AC Motor не является исключением из целей компании.
Anaheim Automation предлагает широкий выбор стандартных двигателей переменного тока. Иногда OEM-заказчики со средним и большим количеством требований предпочитают иметь двигатель переменного тока, который настраивается или модифицируется в соответствии с их точными требованиями к конструкции. Иногда настройка настолько проста, как модификация вала, тормоз, масляное уплотнение для степени защиты IP65, установочные размеры, цвета проводов или этикетка. В других случаях заказчик может потребовать, чтобы двигатель переменного тока соответствовал идеальным характеристикам, таким как скорость, крутящий момент и / или напряжение.Для получения более подробной информации обсудите требования к вашему приложению с инженером по автоматизации в Анахайме.
Двигатель переменного тока Anaheim Automation
Инженеры ценят то, что линейка двигателей переменного тока Anaheim Automation может удовлетворить их стремление к творчеству, гибкости и эффективности системы. Покупатели ценят простоту «универсального магазина» и экономию затрат благодаря индивидуальной конструкции электродвигателя переменного тока, в то время как инженеры довольны тем, что Anaheim Automation уделяет особое внимание их конкретным системным требованиям.
Стандартная линейка двигателей переменного тока Anaheim Automation представляет собой экономичное решение, поскольку они известны своей прочной конструкцией и отличными характеристиками. Значительный рост продаж компании явился результатом целенаправленного проектирования, дружелюбного обслуживания клиентов и профессиональной поддержки приложений, что часто превосходит ожидания клиентов в отношении выполнения их индивидуальных требований. Хотя значительная часть продаж двигателей переменного тока Anaheim Automation связана с особыми, индивидуальными требованиями или требованиями частной марки, компания гордится своей стандартной базой складских запасов, расположенной в Анахайме, Калифорния, США.Чтобы сделать индивидуальную настройку двигателя переменного тока доступной, требуется минимальное количество и / или плата за непериодическое проектирование (NRE). Свяжитесь с заводом-изготовителем для получения подробной информации, если вам потребуется специальный двигатель переменного тока в конструкции вашей системы управления движением.
Все продажи индивидуализированного или модифицированного двигателя переменного тока не подлежат отмене и возврату, и для каждого запроса клиент должен подписать соглашение NCNR. Все продажи, включая индивидуальный двигатель переменного тока, осуществляются в соответствии со стандартными положениями и условиями Anaheim Automation и заменяют любые другие явно выраженные или подразумеваемые условия, включая, помимо прочего, любые подразумеваемые гарантии.
Anaheim Automation Клиенты линейки продуктов AC Motor разнообразны: компании, эксплуатирующие или проектирующие автоматизированное оборудование или процессы, которые включают в себя пищевую, косметическую или медицинскую упаковку, маркировку или требования по защите от несанкционированного вскрытия, сборку, конвейер, погрузочно-разгрузочные работы, робототехнику, специальную съемку проекционные эффекты, медицинская диагностика, устройства контроля и безопасности, управление потоком насосов, изготовление металла (станки с ЧПУ) и модернизация оборудования. Многие OEM-заказчики требуют, чтобы мы присвоили двигателю переменного тока «частную марку», чтобы их клиенты оставались верными им при обслуживании, замене и ремонте.
Электродвигатель переменного тока Quiz
Q: Какие три основных типа электродвигателей переменного тока предлагает Anaheim Automation?
A: Индукционные, синхронные и промышленные
В: Каковы компоненты частотно-регулируемого привода?
A: Частотно-регулируемый привод включает двигатель переменного тока, контроллер и интерфейс оператора.
В: Какой двигатель обычно используется в частотно-регулируемом приводе?
A: Трехфазный асинхронный двигатель
В: Каковы основные компоненты двигателя переменного тока?
A: Стационарный статор, который находится снаружи и имеет катушки, на которые подается переменный ток, и внутренний ротор, прикрепленный к выходному валу.
В: Почему необходимо подключать конденсатор к асинхронному двигателю переменного тока?
A: Любой двигатель ACP-M, считающийся однофазным асинхронным двигателем, является двигателем с конденсаторным приводом. Следовательно, для его запуска необходимо создать вращающееся магнитное поле. Конденсаторы создают источник питания с фазовым сдвигом, который необходим для создания необходимого вращательного магнитного поля. С другой стороны, трехфазные двигатели всегда подают питание с разными фазами, поэтому им не нужны конденсаторы.
В: Что подразумевается под реверсивным двигателем, рассчитанным на 30 минут?
A: Двигатель рассчитан на оптимальную работу не более 30 минут. Если работать постоянно, двигатель перегорит.
Часто задаваемые вопросы о двигателях переменного тока:
В: Почему следует выбрать трехфазный двигатель вместо однофазного?
A: Однофазные двигатели переменного тока мощностью более 10 л.с. (7,5 кВт) обычно не так распространены. Трехфазные двигатели менее вибрируют, что продлевает срок их службы по сравнению с однофазными двигателями той же мощности, используемыми в тех же условиях.
В: В чем разница между частотно-регулируемым приводом и частотно-регулируемым приводом?
A: Приводы с переменной частотой (VFD) обычно относятся только к приводам переменного тока, в то время как приводы с регулируемой скоростью (VSD) могут относиться либо к приводу переменного тока, либо к приводу постоянного тока. VFD управляет скоростью двигателя переменного тока, изменяя частоту двигателя. С другой стороны, преобразователи частоты изменяют напряжение для управления двигателем постоянного тока.
В: Могу ли я изменить направление вращения асинхронного двигателя переменного тока, если я подключил его, как показано в каталоге, например, ACP-M-4IK25N-AU?
A: Да, можно.Однако перед переключением направления убедитесь, что двигатель полностью остановлен. Если требуется немедленное реверсирование, реверсивный двигатель лучше подходит для данной области применения; например ACP-M-4RK25N-AU.
В: Можно ли изменить скорость асинхронных двигателей переменного тока и реверсивных двигателей?
A: Частота источника питания определяет скорость однофазных (переменного тока) асинхронных и реверсивных двигателей. Если ваше приложение требует изменения скорости, рекомендуется использовать двигатель с регулировкой скорости.
В: Будет ли временное хранение моего асинхронного двигателя переменного тока при температуре от 0 ° F до -20 ° F создавать какие-либо проблемы?
A: Резкие перепады температуры могут привести к конденсации влаги внутри двигателя. В этом случае компоненты могут заржаветь, что значительно сократит срок службы. Постарайтесь избежать образования конденсата.
В: Это плохо, если мой асинхронный двигатель переменного тока сильно нагревается?
A: При преобразовании электрической энергии во вращательное движение внутри двигателя выделяется тепло, в результате чего он становится горячим.Температура двигателя переменного тока равна повышению температуры, вызванному потерями в двигателе, плюс температура окружающей среды. Если температура окружающей среды составляет 85 ° F, а внутренние потери в двигателе составляют 90 ° F (32 ° C), поверхность двигателя будет 175 ° F (79 ° C). Это не типично для маленького мотора.
В: Почему некоторые головки шестерен двигателя переменного тока выводят выходной сигнал противоположно двигателю, а другие — в том же направлении?
A: Редукторы снижают скорость двигателя от 1/3 до 1/180 (для асинхронных двигателей переменного тока.