Регулятор оборотов N76E003AT20 трёхфазного мотора ШИМ 6-30В 2А
ШИМ-регулятор оборотов трёхфазного бесщёточного мотора постоянного тока
- Рабочее напряжение: 6-30 В
- Потребляемый ток: 0.1 А
- Максимальный рабочий ток: 2 А
- Микроконтроллер: N76E003AT20
- Тип ШИМ: цифровой
- Частота ШИМ: 0.5-20 кГц
- Напряжение ШИМ-сигнала: 0.1-5 В
- Ручное управление
- Защита: от обратной полярности входного напряжения
- Размеры: 64 х 33 х 15 мм
- Вес: 17 гр
ШИМ-регулятор оборотов трёхфазного бесщёточного (бесколлекторного) мотора относится к определённому виду электронных устройств, умеющих создавать и контролировать цифровую широтно-импульсную модуляцию (ШИМ). Модуль позволяет управлять моторами, в конструкции которых уже установлен внутренний драйвер, способный самостоятельно распределять токи по фазам, а также понимать сигналы управления, получаемые от ШИМ-регулятора.
В основу регулятора заложено 3 функции: смена направления вращения вала мотора (CW/CCW), моментальная остановка мотора, и изменение скорости вращения вала мотора с использованием ШИМ-модуляции 0.1-5 вольт (PWM). Для каждой функции на плате имеются необходимые кнопки/ручки и клеммы-терминалы с винтовыми зажимами, к которым и подключается трёхфазный бесщёточный мотор.
Регулятор собран на предварительно запрограммированной микросхеме N76E003AT20 с ядром 8-битного микроконтроллера 1Т 8051. Модуль самостоятельно генерирует электрические импульсы прямоугольной формы, моментально переключающие напряжение выходного сигнала ШИМ от 0 до 5 вольт. Наличие высокоуровневого импульса можно представить логической единицей, каждое его отсутствие — логическим нулём. Усреднённое суммарное количество единиц и нулей в один момент времени определяет напряжение на выходе ШИМ.
Конструкцией предусмотрена возможность плавной настройки частоты импульсов в диапазоне 0.5 — 20 кГц. Изменение пульсации осуществляется вращением ручки переменного резистора.
Нажатия механической кнопки смены направления вращения заставляют контроллер N76E003 генерировать на вывод CW/CCW сигналы низкого или высокого уровня (2,5-3 вольта), интерпретируемые драйвером мотора в команды переключения. Каждое следующее нажатие кнопки управления поочерёдно меняет уровень сигнала на клемме.
Каждое следующее нажатие кнопки управления поочерёдно меняет уровень сигнала на клемме.
В регуляторе предусмотрена быстрая остановка мотора, выполняемая нажатием механической кнопки управления. В процессе работы мотора, модуль выдаёт постоянный импульс с напряжением 1.5-1.7 вольта на клемму-терминал. Сигнал низкого уровня воспринимается драйвером мотора как команда полной остановки. При этом, функция ШИМ у модуля регулятора полностью отключается. Последующие нажатия кнопки чередуют уровни сигнала на соответствующем выводе клеммы.
Модуль ШИМ-регулятора питается от внешнего источника с напряжением, одновременно предназначенным для работы трёхфазного мотора. Допускается подключать источники и моторы с номинальным напряжением 6-30 вольт и током до 2 ампер. Превышение входного уровня напряжения более 30 вольт может повредить встроенный понижающий стабилизатор 78m05, формирующий необходимое питание для контроллера N76E003.
Электрическая схема модуля обладает единственной защитой — от обратной полярности входного напряжения, подключаемого на клеммы-терминалы от внешнего источника питания.
Каталог радиолюбительских схем. Регулятор оборотов трехфазного двигателя.
Каталог радиолюбительских схем. Регулятор оборотов трехфазного двигателя.Регулятор оборотов трехфазного двигателя.
Как то, на работе, мне понадобилось регулировать обороты 3-х фазного двигателя
почти от нуля, до полной скорости.
Я взял за основу схему регулятора
освещенности, Китайского производства, на симисторе.
Симисторы применил
КУ 208Г, а динисторы китайские(марку не удалось узнать, но подошли
идеально).
Пробовал динисторы КН 102, но у меня были только КН 102А, а
они регулировали мощность не с нуля, поэтому, если кто будет повторять
схему, надо будет пробовать разные динисторы, с разным напряжением
пробоя.
Основная сложность состоит в изготовлении строенного
переменного резистора, т.к. необходимо, чтобы все 3 симистора открывались
одновременно.
Тут возможны любые варианты. Я, например, брал 2
переменных резистора от регулятора громкости от стерео-магнитолы и собирал
из них один строенный.
Я, например, брал 2
переменных резистора от регулятора громкости от стерео-магнитолы и собирал
из них один строенный.
Настройка очень проста (деталей-то мало!), и
поэтому описывать ее не буду.
Кстати, в магазинных светорегуляторах стоят дросселя и емкости фильтра помех. Их убирать не надо. Я в свою самоделку фильтр не ставил, т.к. на производстве это не очень то и надо! 🙂
Рис.1. Принципиальная схема регулятора оборотов трехфазного двигателя.
Рис.2. Печатная плата регулятора оборотов трехфазного двигателя.
* Динисторы КН 102 необходимо подбирать для получения
плавной регулировки оборотов.
* Необходимо, также, центр »звезды» двигателя, для правильной работы регулятора, соединить с нулем 3-х фазной сети.
Автор: Колосов Сергей
©
Silver Hawk г. Канск 2004г.
Источник материала
Промышленное вентиляционное оборудование | Как подобрать регулятор скорости для управления вентилятором?
При проектировании системы вентиляции часто важно обеспечивать плавность ее управления. Для этого используют регуляторы скорости.
Регулятор скорости нужен, чтобы менять скорость вращения двигателя. Чтобы выбрать его правильно, нужно учитывать количество питающих фаз, номинальное напряжение, частоту (Гц), мощность и номинальный ток.
Компания НЕВАТОМ предлагает три типа регуляторов скорости.
1) Частотные регуляторы скорости VLT ND-051 компании Danfoss Drives для трёхфазных вентиляторов
Данные устройства регулируют частоту переменного тока, чтобы менять рабочую точку вентилятора.
Частотные регуляторы VLT ND-051
-
Защищают от бросков напряжения и перегрузок
-
Обеспечивают плавный пуск и остановку электрооборудования
-
Обладают широким спектром мощностей – НЕВАТОМ предлагает преобразователи с диапазоном мощностей от 0,35 до 22 кВт включительно*
-
Комплектуются пультом управления
-
Экономят от 5 до 15% электроэнергии за счёт автоматической оптимизации энергопотребления
2) Трансформаторные регуляторы скорости R-E компании Ziehl Abegg для однофазных вентиляторов
Трансформаторный регулятор меняет скорость вращения однофазного двигателя с помощью изменения подаваемого напряжения.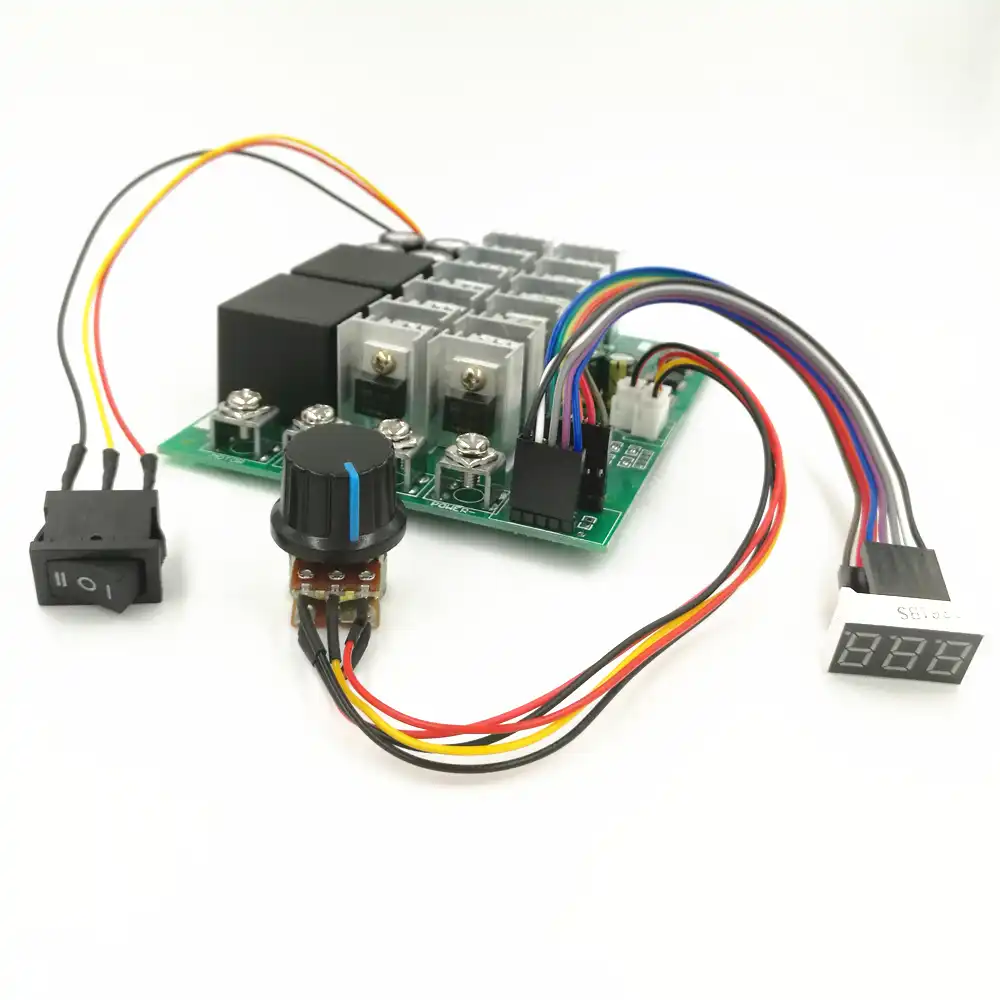 Само напряжение формирует автотрансформатор.
Само напряжение формирует автотрансформатор.
Особенностью трансформаторных регуляторов является наличие жестко заданных скоростей вращения. Регуляторы R-E позволяют переключаться между пятью скоростями.
Чтобы выбрать трансформаторный регулятор нужно знать максимальный ток, потребляемый двигателем. Трансформаторный регулятор совместим только с теми двигателями, скорость которых может меняться при помощи изменения подаваемого напряжения.
Преимущества трансформаторных регуляторов R-E компании Ziehl Abegg — это
-
Максимальный ток до 10 А
-
Пониженный уровень шума двигателя при низких скоростях
3) Симисторные регуляторы скорости СРМ и СРМщ для однофазных вентиляторов
Симисторные регуляторы нужны, чтобы плавно менять скорости вращения однофазных асинхронных двигателей. Полупроводниковый прибор — симистор — меняет выходное напряжение, подаваемое на вентилятор. Именно поэтому симисторные регуляторы СРМ и СРМщ обеспечивают плавное управление однофазными вентиляторами.
Полупроводниковый прибор — симистор — меняет выходное напряжение, подаваемое на вентилятор. Именно поэтому симисторные регуляторы СРМ и СРМщ обеспечивают плавное управление однофазными вентиляторами.
Преимущества симисторных регуляторов скорости такие
-
Есть плавкий предохранитель для защиты от перегрузки
-
Три варианта исполнения: на DIN-рейку, накладной и встраиваемый в подрозетник
-
Свободный выбор рабочей точки вручную
-
Возможность управления по внешнему сигналу 0..10 В
При проектировании систем вентиляции НЕВАТОМ рекомендует использовать регуляторы скорости, потому что:
-
Они позволяют самостоятельно регулировать производительность вентилятора и экономить на электроэнергии, если это нужно.

-
В системах с рекуператорами они позволяют реализовать их защиту от обледенения. Для этого нужно уменьшить (или полностью прекратить) поток приточного и увеличить поток вытяжного воздуха.
-
Их используют в системах с поддержанием постоянного или переменного расхода воздуха для автоматического изменения производительности вентилятора.
Чтобы узнать больше об оборудовании и его наличии, обратитесь в ближайший филиал НЕВАТОМ по телефону www.nevatom.ru/contacts.
Всегда впереди вместе!
Что такое регулятор оборотов электродвигателя. Примеры,описание регуляторов
Устройство, предназначенное для выполнения функции плавного увеличения или уменьшения скорости вращения вала электрического двигателя. Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения
Регулировку можно осуществлять методом широтно-импульсной модуляции и методом изменения фазного напряжения
Для управления и регулировки числа оборотов вращения электродвигателя асинхронного типа можно использовать импульсный регулятор-стабилизатор напряжения (инвертор). Он будет выполнять функцию источника питания. В его основу положено применение импульсного ШИМ-регулятора марки ТL494. Питающее напряжение электродвигателя, выходящее после ШИМ-регулятора, будет изменяться в соответствии с изменением частоты вращения. Используя этот способ, достигается больший экономический эффект, устройство достаточно простое и при этом увеличивает эффективность регулирования.
Что такое регулятор оборотов электродвигателя
Рис № 1. Схема использования ШИМ-регулятора для трехфазного асинхронного двигателя, подключенного через конденсатор к однофазной сети.
Этот способ, несмотря на свою эффективность, имеет два существенных недостатка – это:
- Невозможность реверсивного управления двигателем без использования дополнительных коммутирующих аппаратов.

- Частотные преобразователи, использованные в регуляторе, отличаются высокой стоимостью и выпускаются ограниченным числом производителей.
Существует несколько видов блоков управления, изготовленных промышленным способом, они используются для однофазных асинхронных двигателей, границы регулирования составляют от 25 до 100% от значения мощности, и от 1000 до 4000 об/мин. Это устройства с маркировкой РВС207, РВ600/900.
Работа блока регулировки происходит при изменении средней величины переменного напряжения на электродвигателе. Она производится с помощью метода фазового регулирования напряжения, при изменении угла открытия полупроводниковых приборов (тиристоров, симисторов и т. д.) при использовании которых осуществлена сборка схемы.
Управление блоком осуществляется посредством использования внешнего переменного резистора. В том случае, когда мощность менее 25% двигатель отключается и переходит в дежурный режим ожидания.
Контроль за работой осуществляется при помощи светового индикатора. Отключенное состояние двигателя – изредка мигает красный цвет. Двигатель работает – скважность включения индикатора пропорциональна оборотам вращения (производительности) двигателя.
Что такое регулятор оборотов электродвигателя
Рис №2. Схема подключения блока регулятора РВС 207.
Регулятор скорости асинхронного двигателяПомимо образцов регуляторов, промышленных образцов регуляторов существует возможность самостоятельного выполнения регуляторов скорости бесколлекторных двигателей, не уступающих промышленным образцам. За основу схемы берется пример регулятора промышленного производства, ее можно собрать своими силами.
Что такое регулятор оборотов электродвигателя
Рис №3. Электрическая схема регулятора скорости вращения бесколлекторного двигателя.
Регулировать количество оборотов вращения вала бесколлекторного асинхронного электродвигателя допускается также при изменении значения переменного напряжения, подаваемого к двигателю.
В состав регулятора входит задающий генератор, он служит для изменения частоты в границах значений 50 – 200 Гц. Генератор состоит из мультивибратора, работа, которого строится на микросхеме К561ЛА7 и счетчика-дешифратора марки К561ИЕ8 с коэффициентом пересчета – 8, она отвечает за формирование сигналов управления силовыми полевыми транзисторами полумоста.
В схеме присутствует выходной трансформатор Т-1. Он служит для развязки транзисторов полумоста.
Выпрямитель включает в свою конструкцию диодный мост и удваивающие напряжение питания – конденсаторы с большой емкостью.
Диодный мост подключен по нетрадиционной схеме. С4 и R7 выполняют роль демпфирующей цепи, она служит для сглаживания всплесков напряжения, которые представляют собой опасность для транзисторов VТ4.
Рекомендация: для трансформатора управления транзисторными ключами, можно применить трансформатор от телевизионного блока питания., в этом случае тип не играет большого значения, главное, чтобы первичная обмотка состояла из 120 витков провода 0,7 мм2, вторичная представляет собой 2 независимые друг от друга обмотки с количеством витков – 60, провод, применяемый во вторичной обмотке, аналогичен проводу первичной.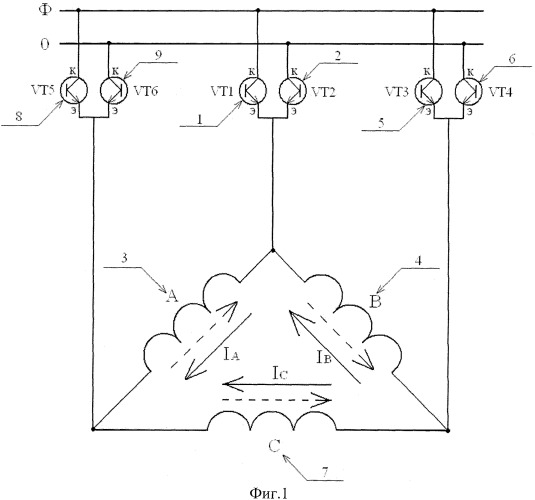 Первичная обмотка имеет напряжение 2 х 12В, вторичная обмотка – по 12В каждая.
Первичная обмотка имеет напряжение 2 х 12В, вторичная обмотка – по 12В каждая.
Необходимо помнить, что обе вторичные обмотки должны обладать хорошей изоляцией друг от друга, между обмотками присутствует высокий потенциал, он составляет 640В, они подключаются к затворам транзисторных ключей в противофазе.
Такой регулятор может управлять вращением асинхронного двигателя с максимальным значением рабочей мощности – 500Вт. Чтобы регулятор использовать для регулировки электродвигателей более высокой мощности нужно применить большее количество силовых ключей, а также изменить в сторону увеличения емкость конденсаторов для питающего фильтра, это элементы схемы С3 и С4. Для регулятора достаточно использовать печатную плату размером 110 х 80 мм. Управляющий силовыми транзисторными ключами трансформатор монтируется отдельно от блока регулятора.
Короткая заметка: Изготовление в России и для российского рынка керамогранитных изделий приемлемой стоимости. Плитка Италон имеет цены соответствующие качеству. Убедитесь сами, перейдя по ссылке http://www.keramogranit.ru/vendor.94.html
Убедитесь сами, перейдя по ссылке http://www.keramogranit.ru/vendor.94.html
- Печать
- по электронной почте
Регулятор напряжения для двигателя постоянного тока 12в. Самодельный вариатор скорости вращения электродвигателя. Принцип работы регулятора оборотов
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Фото – регулятор оборотов двигателя постоянного тока
Зачем нужен регулятор оборотов асинхронного электродвигателя:
- Для экономии электроэнергии. Контролируя скорость мотора, плавность его пуска и остановки, силы и частоты оборотов, можно добиться значительной экономии личных средств.
 В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%.
В качестве примера, снижение скорости на 20% может дать экономию энергии в размере 50%. - Преобразователь частоты может использоваться для контроля температуры процесса, давления или без использования отдельного контроллера;
- Не требуется дополнительного контроллера для плавного пуска;
- Значительно снижаются расходы на техническое обслуживание.
Устройство часто используется для сварочного аппарата (в основном для полуавтоматов), электрической печки, ряда бытовых приборов (пылесоса, швейной машинки, радио, стиральной машины), домашнего отопителя, различных судомоделей и т.д.
Фото – шим контроллер оборотов
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.
Фото – схема регулятора для коллекторного двигателя
В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Фото – синусоида нормальной работы электродвигателя
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления.
 Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными; - Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).

При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.
Фото – схема регулятора для бесколлекторных двигателей
В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Как сделать самодельный регулятор оборотов двигателя
Можно сделать простой симисторный регулятор оборотов электродвигателя, его схема представлена ниже, а цена состоит только из деталей, продающихся в любом магазине электротехники.
Для работы нам понадобится мощный симистор типа BT138-600, её советует журнал радиотехники.
Фото – схема регулятора оборотов своими руками
В описанной схеме, обороты будут регулироваться при помощи потенциометра P1. Параметром P1 определяется фаза входящего импульсного сигнала, который в свою очередь открывает симистор. Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Такая схема может применяться как в полевом хозяйстве, так и в домашнем. Можно использовать данный регулятор для швейных машинок, вентиляторов, настольных сверлильных станков.
Принцип работы прост: в момент, когда двигатель немного затормаживается, его индуктивность падает, и это увеличивает напряжение в R2-P1 и C3, то в свою очередь влечет более продолжительное открытие симистора.
Тиристорный регулятор с обратной связью работает немного по-другому. Он обеспечивает обратный ход энергии в энергетическую систему, что является очень экономным и выгодным. Данный электронный прибор подразумевает включение в электрическую схемы мощного тиристора. Его схема выглядит вот так:
Здесь для подачи постоянного тока и выпрямления требуется генератор управляющего сигнала, усилитель, тиристор, цепь стабилизации оборотов.
5 частых вопросов, которые задают начинающие радиомеханики; 5 лучших транзисторов для регуляторов, тест на определение состава схемы
Регулятор электрического напряжения нужен для того, чтобы величина напряжения могла стабилизироваться. Он обеспечивает надежность работы и долговечность работы прибора.
Он обеспечивает надежность работы и долговечность работы прибора.
Регулятор состоит из нескольких механизмов.
ТЕСТ:
Ответы на эти вопросы позволят узнать состав схемы регулятора напряжения 12 вольт и её сборку.- Какое сопротивление должно быть у переменного резистора?
- Как нужно подключать провода?
a) 1 и 2 клемма – питание, 3 и 4 – нагрузка
- Нужно ли устанавливать радиатор?
- Транзистор должен быть
Ответы:
Вариант 1. Сопротивление резистора 10 кОм – это стандарт для установки регулятора, провода в схеме подключаются по принципу: 1 и 2 клемма для питания, 3 и 4 для нагрузки – ток распределится правильно по нужным полюсам, радиатор устанавливать нужно – чтобы защитить от перегрева, транзистор использован КТ 815 – такой всегда подойдет. В таком варианте построенная схема сработает, регулятор станет работать.
Вариант 2. Сопротивление 500 кОм – слишком высокое, будет нарушена плавность звука в работе, а может не сработать вообще, 1 и 3 клемма это нагрузка, 2 и 4 питание, радиатор нужен, в схеме, где стоял минус будет плюс, транзистор любой – действительно можно использовать какой угодно.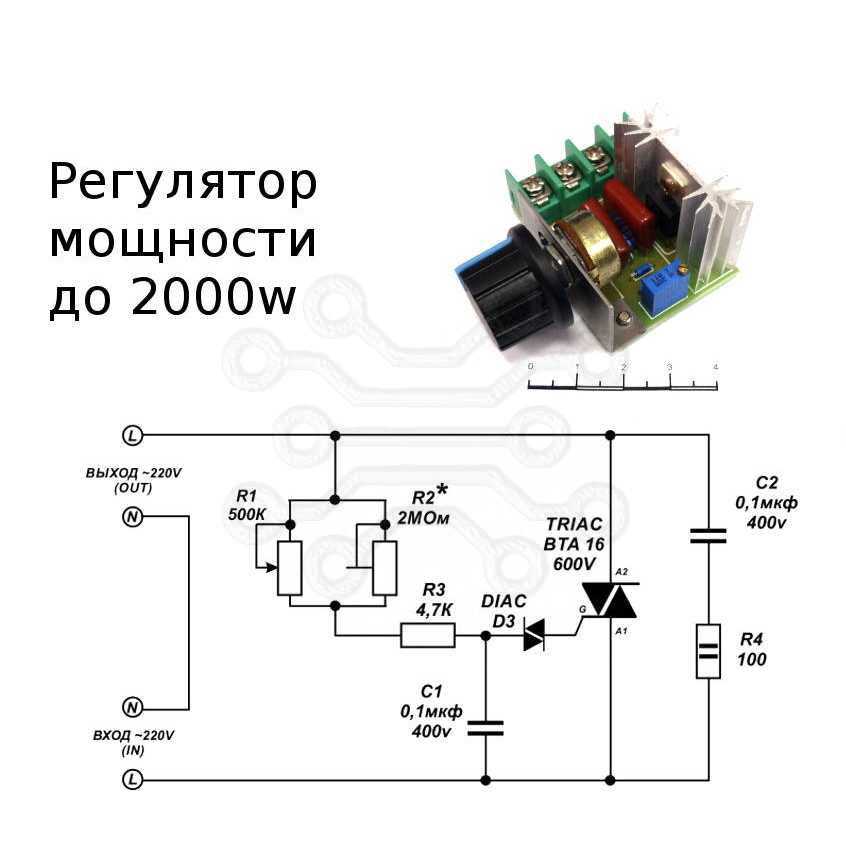 Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Регулятор не заработает из-за того, что схема собрана, будет неправильно.
Вариант 3. Сопротивление 10кОм, провода – 1 и 2 для нагрузки, 3 и 4 для питания, резистор имеет сопротивление 2кОм, транзистор КТ 815. Прибор не сможет заработать, так как он сильно перегреется без радиатора.
Как соединить 5 частей регулятора на 12 вольт.
Переменный резистор 10кОм.
Это переменный резистор 10ком. Изменяет силу тока или напряжений в электрической цепи, увеличивает сопротивление. Именно им регулируется напряжение.
Радиатор. Нужен для того, чтобы охладить приборы в случае их перегрева.
Резистор на 1 ком. Снижает нагрузку с основного резистора.
Транзистор. Прибор, увеличивает силу колебаний. В регуляторе он нужен, чтобы получить электрические колебания высокой частоты
2 проводка. Необходимы для того, чтобы по ним шел электрический ток.
Берем транзистор и резистор. У обоих есть 3 ответвления.
У обоих есть 3 ответвления.
Проводятся две операции:
- Левый конец транзистора (делаем это алюминиевой частью вниз) присоединяем к концу, который находится в середине резистора.
- А ответвление середины транзистора соединяем с правым у резистора. Их необходимо припаять друг к другу.
Первый провод необходимо спаять с тем, что получилось во 2 операции.
Второй нужно спаять с оставшимся концом транзистора.
Прикручиваем к радиатору соединенный механизм.
Резистор на 1кОм припаиваем к крайним ножкам переменного резистора и транзистора.
Схема готова.
Регулятор скорости двигателя постоянного тока с помощью 2 конденсаторов на 14 вольт.
Практичность таких двигателей доказана, они используются в механических игрушках, вентиляторах и др. У них малый ток потребления, поэтому требуется стабилизация напряжения. Часто возникает необходимость подстройки частоты вращения или изменения скорости двигателя для корректировки выполнения цели, представленной какому – либо типу электродвигателя любой модели.
Эту задачу выполнит регулятор напряжения, который совместим с любым типом блока питания.
Чтобы это осуществить, надо изменить выходное напряжение, не требующее большого тока нагрузки.
Необходимые детали:
- 2 Конденсатора
- 2 переменных резистора
Соединяем части:
- Подключаем конденсаторы к самому регулятору.
- Первый резистор подключается с минусом регулятора, второй на массу.
Теперь менять скорость двигателя у прибора по желанию пользователя.
Регулятор напряжения на 14 вольт готов.
Простой регулятор напряжения 12 вольт
Регулятор оборотов 12 вольт для двигателя с тормозом.
- Реле – 12 вольт
- Теристор КУ201
- Трансформатор для запитки двигателя и реле
- Транзистор КТ 815
- Вентиль от дворников 2101
- Конденсатор
Используется для регулировки подачи проволоки, поэтому в ней присутсвует тормоз двигателя, реализованный с помощью реле.
К реле подключаем 2 провода от блока питания. На реле подается плюс.
Всё остально подключается по принципу обычного регулятора.
Схема полностью обеспечила 12 вольт для двигателя.
Регулятор мощности на симисторе BTA 12-600
Симистор – полупроводниковый аппарат, причисляется к разновидности тиристора и используется в целях коммутации тока. Он работает на переменном напряжении в отличие от динистора и обычного тиристора. От его параметра зависит вся мощность прибора.
Ответ на вопрос. Если схема собиралась бы на тиристоре, необходим был бы диод или диодный мост.
Для удобства схему можно собрать на печатной плате.
Плюс конденсатора нужно припаять к управляющему электроду симистора, он находится справа. Минус спаять с крайним третьим выводом, который находится слева.
К управляющему электроду симистора припаять резистор с номинальным сопротивлением 12 кОм. К этому резистору нужно присоединить подстрочный резистор. Оставшийся вывод нужно припаять к центральной ножке симистора.
К минусу конденсатора, который припаян к третьему выводу симистора необходимо прикрепить минус от выпрямительного моста.
Плюс выпрямительного моста к центральному выводу симистора и к той части, к которой симистор крепится на радиатор.
1 контакт от шнура с вилкой припаиваем к необходимому прибору. А 2 контакт к входу переменного напряжения на выпрямительном мосту.
Осталось припаять оставшийся контакт прибора с последним контактом выпрямительного моста.
Идет тестирование схемы.
Включаем схему в сеть. С помощью подстрочного резистора регулируется мощность прибора.
Мощность можно развить до 12 вольт для авто.
Динистор и 4 типа проводимости.
Это устройство, называется тригерным диодом. Обладает небольшой мощностью. В его внутренности нет электродов.
Динистор открывается при наборе напряжения. Скорость набора напряжения определяется конденсатором и резисторами. Вся регулировка производится через него. Работает на постоянном и переменном токе. Его можно не покупать, он находится в энергосберегающих лампах и его легко оттуда достать.
В схемах используется не часто, но чтобы не затрачивать деньги на диоды, применяют динистор.
Он содержит 4 типа: P N P N. Это сама электрическая проводимость. Между 2 прилегающими друг к другу областями образуется электронно-дырочный переход. В динистре таких переходов 3.
Схема:
Подключаем конденсатор. Он начинает заряжаться с помощью 1 резистора, напряжение почти равно тому, что в сети. Когда напряжение в конденсаторе достигнет уровня динистора, он включится. Прибор начинает работать. Не забываем про радиатор, иначе всё перегреется.
3 важных термина.
Регулятор напряжения – прибор, позволяющий на выходе подстраивать напряжение под устройство, для которого он необходим.
Схема для регулятора – рисунок, изображающий соединение частей устройства в одно целое.
Автомобильный генератор – устройство, в котором используется стабилизатор, обеспечивает превращение энергии коленчатого вала в электрическую.
7 основных схем для сборки регулятора.
СНИП
Использование 2 транзисторов. Как собрать стабилизатор тока.
Резистор 1кОм равен стабилизатору тока для нагрузки 10Ом. Главное условие – напряжение питания было стабилизированным. Ток зависит от напряжения по закону Ома. Сопротивление нагрузки намного меньше, чем сопротивление тока ограничивающего резистора.
Резистор 5 ватт, 510 Ом
Переменный резистор ППБ-3В, 47 Ом. Потребление – 53миллиампера.
Транзистор кт 815, установленный на радиаторе ток базы данного транзистора, задан резистором номиналом 4 и 7 кОм.
СНИП
СНИП
Еще важно знать
- На схеме стоит знак минуса, чтобы он был и в работе, то транзистор должен быть NPN структуры. Нельзя использовать PNP так как минус будет плюсом.
- Напряжение нужно постоянно регулировать
- Какая величина тока в нагрузке, это нужно знать, чтобы регулировать напряжение и прибор не переставал работать
- Если разность потенциалов будет больше 12 вольт на выходе, то значительно уменьшится уровень энергии.
Топ 5 транзисторов
Разные виды транзисторов применяются для разных целей, и существует необходимость его выбирать.
- КТ 315. Поддерживает NPN структуру. Выпущен в 1967 году, но до сих пор используется. Работает в динамическом режиме, и в ключевом. Идеален для приборов малой мощности. Больше подходит для радиодеталей.
- 2N3055. Лучше всего подходит для звуковых механизмов, усилителей. Работает в динамическом режиме. Спокойно используется для регулятора 12 вольт. Удобно крепится на радиатор. Работает на частотах до 3 МГц. Хоть транзистор и выдерживает только до 7 ампер, он вытягивает мощные нагрузки.
- КП501. Производитель рассчитывал его на применение в телефонных аппаратах, механизмах связи и радиоэлектронике. Через него происходит управление приборами с минимальными затратами. Преобразует уровни сигнала.
- Irf3205. Пригоден для автомобилей, повышает высокочастотные инверторы. Поддерживает значительный уровень тока.
- KT 815. Биполярен. Имеет структуру NPN. Работает с усилителями низкой частоты. Состоит из пластмассового корпуса. Подходит для импульсных устройств. Используется часто в генераторных схемах. Транзистор сделан давно, по сей день работает. Даже есть шанс, что он находится в обычном доме, где лежат старые приборы, нужно только их разобрать и посмотреть, есть ли там.
3 ошибки и как их избежать.
- Ножки транзистора и резистора спаяны друг с другом полностью. Чтобы этого избежать, нужно внимательно читать инструкцию.
- Хоть и поставлен радиатор, перегрелся прибор.Это связано с тем, что во время того, как детали спаиваются, происходит перегрев. Для этого нужно, ножки транзистора держать пинцетом для отвода тепла.
- Реле не стало работать после починки. Выгоняет проволоку после того как отпустил кнопку. Проволока по инерции тянется. Значит, не работает электротормоз. Берем реле с хорошими контактами и подключаем к кнопке. Подключить провода для питания. Когда на реле не подается напряжение, контакты становятся замкнутыми, поэтому обмотка замыкается сама на себя. Когда на реле подается напряжение(плюс), меняются контакты в схеме и напряжение подается на мотор.
Ответы на 5 часто задаваемых вопросов
- Почему входное напряжение выше, чем выходное?
По такому принципу работают все стабилизаторы, при таком типе работы напряжение приходит в норму и не скачет от условленных ей значений.
- Может ли убить током при неполадке или ошибке?
Нет, не убьет током, напряжение в 12 вольт слишком мало, чтобы это произошло.
- Нужен ли постоянный резистор? И если нужен, то, для каких целей?
Не обязательно, но используется. Он нужен для того, чтобы ограничить ток базы транзистора при крайнем левом положении переменного резистора. И также при его отсутствии может сгореть переменный.
- Можно ли использовать схему КРЕН вместо резистора?
Если вместо переменного резистора включить регулируемую схему КРЕН, которую часто используют, то тоже получится регулятор напряжения. Но есть оплошность: низкий КПД. Из-за этого высокое собственное энергопотребление и тепловыделение.
- Резистор горит, но ничего не крутится. Что делать?
Резистор обязательно 10кОм. Желательно использовать транзисторы КТ 315 (старой модели) – они желтого или оранжевого цвета с буквенным обозначением.
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо более простой схеме. Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
Схема ШИМ регулятора для мотора 12 В
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Регулятор скорости двигателя переменного тока
ШИМ контроллер на 12 вольт
Драйвер регулятора постоянного тока полумостовой
Схема регулятора оборотов минидрели
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ
Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер.
Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, — это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера.
В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания.
При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя:
Схема регулятора
Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора:
Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения:
Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе:
В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения — отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором.
При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже:
Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике.
Видео работы
В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков .
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор –регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
- Для чего нужен частотный преобразователь оборотов
- Область применения
- Выбираем устройство
- Устройство ПЧ
- Виды устройств
- Процесс пропорциональных сигналов
Функция регулятора в инвертировании напряжения 12, 24 вольт, обеспечение плавности пуска и остановки с использованием широтно-импульсной модуляции.
Контроллеры оборотов входят в структуру многих приборов, так как они обеспечивают точность электрического управления. Это позволяет регулировать обороты в нужную величину.
Область примененияРегулятор оборотов двигателя постоянного тока используется во многих промышленных и бытовых областях. Например:
- отопительный комплекс;
- приводы оборудования;
- сварочный аппарат;
- электрические печи;
- пылесосы;
- швейные машинки;
- стиральные машины.
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
- двигатель переменного тока природный контроллер;
- привод;
- дополнительные элементы.
Схема контроллера оборотов вращения двигателя 12 в изображена на рисунке. Обороты регулируются с помощью потенциометра. Если на вход поступают импульсы с частотой 8 кГц, то напряжение питания будет 12 вольт.
Прибор может быть куплен в специализированных точках продажи, а можно сделать самому.
Схема регулятора оборотов вращения переменного тока
При пуске трехфазного двигателя на всю мощность, передаётся ток, действие повторяется около 7 раз. Сила тока сгибает обмотки двигателя, образуется тепло, на протяжении долгого времени. Преобразователь представляет собой инвертор, обеспечивающий превращение энергии. Напряжение поступает в регулятор, где происходит выпрямления 220 вольт с помощью диода, расположенного на входе. Затем происходит фильтрация тока посредством 2 конденсатора. Образуется ШИМ. Далее импульсный сигнал передаётся от обмоток двигателя к определённой синусоиде.
Существует универсальный прибор 12в для бесколлекторных двигателей.
Для экономии на платежах за электроэнергию наши читатели советуют «Экономитель энергии Electricity Saving Box». Ежемесячные платежи станут на 30-50% меньше, чем были до использования экономителя. Он убирает реактивную составляющую из сети, в результате чего снижается нагрузка и, как следствие, ток потребления. Электроприборы потребляют меньше электроэнергии, снижаются затраты на ее оплату.
Схема состоит из двух частей–логической и силовой. Микроконтроллер расположен на микросхеме. Эта схема характерна для мощного двигателя. Уникальность регулятора заключается в применении с различными видами двигателей. Питание схем раздельное, драйверам ключей требуется питание 12В.
Виды устройств Прибор триакУстройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Преобразователи на электронных ключахРаспространённые регулятор тиристор, обладающие простой схемой работы.
Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.
Схема стабилизатора постоянного тока
Зарядное устройство 24 вольт на тиристоре
К источнику напряжения 24 вольт. Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналовСигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.
Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1. Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3. Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.
Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).
Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.
Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3 . Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.
Вход и выход клеммников-разъемов маркируют белым цветом. Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.
Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2). Затем с помощью ножниц вырезается диск (№3).
Полученную заготовку переворачивают (№1) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).
Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.
Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.
Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы. Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .
Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
Схема регулятора оборотов двигателя постоянного тока работает на принципах широтно-импульсной модуляции и применяется для изменения оборотов двигателя постоянного тока на 12 вольт. Регулирование частоты вращения вала двигателя при помощи широтно-импульсной модуляции дает больший КПД, чем при применение простого изменения постоянного напряжения подаваемого на двигатель, хотя эти схемы мы тоже рассмотрим
Регулятор оборотов двигателя постоянного тока схема на 12 вольт
Двигатель подключен в цепь к полевому транзистору который управляется широтно-импульсной модуляцией осуществляемой на микросхеме таймере NE555, поэтому и схема получилась такой простой.
ШИМ регулятор реализован с помощью обычного генератора импульсов на нестабильном мультивибраторе, генерирующий импульсы с частотой следования 50 Гц и построенного на популярном таймере NE555. Сигналы поступающие с мультивибратора создают поле смещения на затворе полевого транзистора. Длительность положительного импульса настраивается при помощи переменного сопротивления R2. Чем выше длительность положительного импульса поступающего на затвор полевого транзистора, тем большая мощность подается на электродвигатель постоянного тока. И на оборот чем меньше длительность импульса, тем слабее вращается электродвигатель. Эта схема прекрасно работает от аккумуляторной батареи на 12 вольт.
Регулирование оборотов двигателя постоянного тока схема на 6 вольт
Скорость 6 вольтового моторчика можно регулируется в пределах 5-95%
Регулятор оборотов двигателя на PIC-контроллере
Регулировка оборотов в этой схеме достигается подачей на электромотор импульсов напряжения, различной длительности. Для этих целей используются ШИМ (широтно-импульсные модуляторы). В данном случае широтно-импульсное регулирование обеспечивается микроконтроллер PIC. Для управления скоростью вращения двигателя используются две кнопки SB1 и SB2, «Больше» и «Меньше». Изменять скорость вращенияможно только при нажатом тумблере «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30 — 100%.
В качестве стабилизатора напряжения микроконтроллера PIC16F628A, используется трехвыводной стабилизатор КР1158ЕН5В, имеющий низкое падение напряжение «вход-выход», всего около 0,6В. Максимальное входное напряжение — 30В. Все это позволяет применять двигатели с напряжением от 6В до 27В. В роли силового ключа используется составной транзистор КТ829А который желательно установить на радиатор.
Устройство собрано на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы и файл прошивки можно по ссылке выше. (Смотри в архиве папку 027-el )
Эта самодельная схема может быть использована в качестве регулятора скорости для двигателя постоянного тока 12 В с номинальным током до 5 А или как диммер для 12 В галогенных и светодиодных ламп мощностью до 50 Вт. Управление идёт с помощью широтно-импульсной модуляции (ШИМ) при частоте следования импульсов около 200 Гц. Естественно частоту можно при необходимости изменить, подобрав по максимальной стабильности и КПД.
Большинство подобных конструкций собирается по гораздо . Здесь же представляем более усовершенствованный вариант, который использует таймер 7555, драйвер на биполярных транзисторах и мощный полевой MOSFET. Такая схематика обеспечивает улучшенное регулирование скорости и работает в широком диапазоне нагрузки. Это действительно очень эффективная схема и стоимость её деталей при покупке для самостоятельной сборки довольно низкая.
В схеме используется Таймер 7555 для создания переменной ширины импульсов около 200 Гц. Он управляет транзистором Q3 (через транзисторы Q1 — Q2), который контролирует скорость электро двигателя или ламп освещения.
Есть много применений для этой схемы, которые будут питаться от 12 В: электродвигатели, вентиляторы или лампы. Использовать её можно в автомобилях, лодках и электротранспортных средствах, в моделях железных дорог и так далее.
Светодиодные лампы на 12 В, например LED ленты, тоже можно смело сюда подключать. Все знают, что светодиодные лампы гораздо более эффективны, чем галогенные или накаливания, они прослужит намного дольше. А если надо — питайте ШИМ-контроллер от 24 и более вольт, так как сама микросхема с буферным каскадом имеют стабилизатор питания.
Во многих электронных схемах используются системы активного охлаждения с вентиляторами. Чаще всего их моторы управляются микроконтроллером или другой специализированной микросхемой, а скорость вращения регулируется с помощью ШИМ. Такое решение характеризуется не слишком хорошей плавностью работы, может привести к нестабильной работе вентилятора, а кроме того, создает много помех.
Для потребностей высококачественной аудиотехники разработан аналоговый регулятор оборотов вентилятора. Схема пригодится при строительстве усилителей НЧ с активной системой охлаждения и позволяет выполнить плавную регулировку оборотов вентиляторов в зависимости от температуры. Производительность и мощность зависит в основном от выходного транзистора, тесты проводились с выходными токами до 2 А, что позволяет подключить даже несколько больших вентиляторов на 12 В. Естественно можно применить это устройство и для управления обычными моторами постоянного тока, при необходимости повысив питающее напряжение. Хотя для совсем уже мощных двигателей придётся задействовать системы плавного пуска tehprivod.su/katalog/ustroystva-plavnogo-puska
Принципиальная схема регулятора оборотов мотора
Схема состоит из двух частей: дифференциального усилителя и стабилизатора напряжения. Первая часть занимается измерением температуры и обеспечивает напряжение, пропорциональное температуре, когда она превышает установленный порог. Это напряжение является управляющим для стабилизатора напряжения, выход которого контролирует питание вентиляторов.
Схема регулятора оборотов электродвигателя постоянного тока приведена на рисунке. Основа — компаратор U2 (LM393), работающий в этой конфигурации как обычный операционный усилитель. Первая его часть U2A работает как усилитель дифференциальный, чьи условия работы определяют резисторы R4-R5 (47k) и R6-R7 (220k). Конденсатор C10 (22pF) улучшает стабильность усилителя, а R12 (10k) подтягивает выход компаратора к плюсу питания.
На один из входов дифференциального усилителя подается напряжение, которое образуется через делитель, состоящий из R2 (6,8k), R3 (680 Ом) и PR1 (500 Ом), и фильтруется с помощью C4 (100nF). На второй вход этого усилителя поступает напряжение с датчика температуры, который в данном случае один из разъемов транзистора T1 (BD139), поляризованный небольшим током с помощью R1 (6,8k).
Конденсатор C2 (100nF) был добавлен, чтобы фильтровать напряжение с датчика температуры. Полярность датчика и делителя опорного напряжения задает стабилизатор U1 (78L05) вместе с конденсаторами C1 (1000uF/16V), C3 (100nF) и C5 (47uF/25V), предоставляя стабилизированное напряжение 5 В.
Компаратор U2B работает как классический усилитель ошибки. Он сравнивает напряжение с выхода дифференциального усилителя с выходным напряжением с помощью цепочки R10 (3,3k), R11 (47 Ом) и PR2 (200 Ом). Исполнительным элементом стабилизатора является транзистор T2 (IRF5305), база которого управляется делителем R8 (10k) и R9 (5,1k).
Конденсатор C6 (1uF) и C7 (22pF) и C9 (10nF) улучшают стабильность петли обратной связи. Конденсатор C8 (1000uF/16V) фильтрует выходное напряжение, он имеет значительное влияние на стабильность системы. Разъемом выхода — AR2 (TB2), а разъем питания — AR1 (TB2).
Благодаря применению выходного транзистора с низким сопротивлением в открытом состоянии, схема обладает очень малым падением напряжения — порядка 50 мВ при выходном токе 1 А, что не требует блока питания с более высоким напряжением для управления вентиляторами, работающие на 12 В.
В большинстве случаев в роли U2 можно применить популярный операционный усилитель LM358, правда несколько ухудшив выходные параметры.
Сборка регулятора
Монтаж следует начинать с установки двух перемычек, затем должны быть установлены все резисторы и мелкие керамические конденсаторы.
В большинстве случаев оба эти элемента будут установлены снизу платы на ножках, изогнутых под углом 90 градусов. Такая укладка позволит их прикрутить непосредственно к радиатору (обязательно использовать изоляционные прокладки).
Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ 12 В
Регулятор скорости вращения асинхронного электродвигателя.
РадиоКот >Схемы >Питание >Преобразователи и UPS >Регулятор скорости вращения асинхронного электродвигателя.
Как известно можно изменять (регулировать) скорость вращения асинхронного безколлекторного электродвигателя изменяя частоту питающего двигатель переменного напряжения. На этом принципе был разработан, приведенный здесь, электронный регулятор скорости вращения. Регулятор позволяет изменять скорость вращения в довольно широких пределах — от 1000 до 4000 об/мин.
Регулятор состоит из задающего генератора с регулируемой частотой от 50 до 200 Гц, в который входят мультивибратор на микросхеме К561ЛА7 , счетчик К561ИЕ8 формирующий сигналы управления с фиксированным «мертвым временем» для управления силовыми полевиками полумоста регулятора.
Выходной трансформатор Т1 обеспечивает развязку верхнего и нижнего транзисторов полумоста. Выпрямитель, удвоитель напряжения питающей сети состоит из диодного моста VD9, включенного по нестандартной схеме и конденсаторов фильтра на которых и удваивается напряжение питания полумоста.
Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4.
Для трансформатора управления ключами, использовался каркас трансформатора от БП телевизора KORFUNG Ч/Б. Можно применить любой другой с аналогичным сечением железа — тип магнитопровода не имеет значения. Первичная обмотка содержит 120 витков провода диаметром 0,7мм, с отводом от середины, вторичная — две отдельные обмотки по 60 витков тем же проводом. Данные по вольтажу обмоток: первичка 2х12 вольт, вторички 12 вольт каждая, если сечение железа отличается от заданного, расчитать можно по формулам для трансформаторов на 50Гц.
Марка провода роли не играет (медный).
Обе вторичные обмотки нужно хорошо изолировать друг от друга, так как потенциал между ними достигает 640 вольт. Подключать выходные обмотки к затворам ключей необходимо в противофазе.
Регулятор может работать с двигателями мощностью до 500Вт. Для применения регулятора с более мощными двигателями необходимо применить в схеме большее число силовых ключей в параллельном включении и увеличить емкость конденсаторов фильтра питания С3 и С4.
Конструктивно регулятор выполнен на печатной плате размрами 110 х 80мм, трансформатор управления ключами ставится отдельно.
Вопросы, как всегда в Форум.
Как вам эта статья? | Заработало ли это устройство у вас? |
VFD или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью. Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом. В этом сообщении в блоге также представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе регулирования скорости для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2 серии
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью. С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц). При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Частотно-регулируемый привод управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель.Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов. Такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения, обычно предлагаются для повышения производительности.
Одним из недостатков использования частотно-регулируемых приводов является то, что они могут быть дорогими и сложными в размере. Также требуется трехфазный асинхронный двигатель переменного тока с номинальной мощностью инвертора или, по крайней мере, с номинальной продолжительностью.Если двигатель оснащен тормозным механизмом, он обычно сокращает рабочий цикл. Я видел частотно-регулируемые приводы для однофазных двигателей на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь давайте посмотрим на другой метод управления скоростью. Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости.Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент. Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц. Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно падает при падении напряжения на 10 В.Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет. В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости.Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и контроллерами скорости, такими как серии DSC или US2. Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем TRIAC для управления напряжением. Также мы используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от частотно-регулируемого привода. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с приводом от частотно-регулируемого привода, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.
Еще одно преимущество, представленное в серии DSC, — это вертикальная работа. В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. С увеличением скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость.Однако при понижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении позволяет осуществлять контролируемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулировкой скорости с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента скорости двигателя помечена, чтобы показать это. Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы), пожалуйста, обратитесь к пунктирной линии, обозначенной «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Подпишитесь, пожалуйста, в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низких температурах, идеальным вариантом является более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей. Для таких применений, как двойные ленточные конвейеры, машины для полировки / удаления заусенцев или перемешивающие машины, слишком сильные колебания скорости из-за нагрузки могут повлиять на конечный продукт. Если постоянный крутящий момент и регулирование скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.
Щелкните ниже, чтобы сравнить 3 доступные технологии управления скоростью. |
ТРЕХФАЗНЫЙ КОНТРОЛЬ СКОРОСТИ ИНДУКЦИОННОГО ДВИГАТЕЛЯ
(Последнее обновление: 19 августа 2020 г.) Обзор системы управления скоростью трехфазного асинхронного двигателя:Трехфазная система управления скоростью асинхронного двигателя — Техника управления скоростью обычно важна в системе привода с регулируемой скоростью. Для этой системы требуется источник переменного напряжения и частоты, получаемый от трехфазного инвертора источника напряжения. Техника управления скоростью обычно важна в системе привода с регулируемой скоростью.Эта система требует источника переменного напряжения и частоты, получаемого от инвертора трехфазного источника напряжения.
Методы контроля скорости полезны при управлении системой привода скорости. Система требует переменного напряжения и частоты, получаемой от инвертора трехфазного источника напряжения. В статье представлено управление скоростью асинхронного двигателя с питанием от трехфазного инвертора напряжения с использованием метода широтно-импульсной модуляции и универсального моста. Здесь для управления пиковым напряжением звена постоянного тока инвертора источника напряжения был разработан ПИД-регулятор.Их результаты показывают, что регулятор скорости имеет хороший динамический отклик и может успешно управлять асинхронным двигателем с лучшей производительностью.
Введение Асинхронные двигателииспользуются во многих промышленных приводах из-за их простой недорогой конструкции двигателя и превосходной надежности. Управление двигателем затруднено из-за высокой сложности двигателя. Были представлены некоторые стратегии управления двигателями. Техника включает ШИМ-контроль скорости.Управление быстро расширяется с развитием силовой электроники. И они добиваются успеха в применении компонентов инвертора, что сделало его все более популярным. В частности, прискорбно, что ШИМ-управление является одним из хорошо известных методов управления высокой сложностью систем асинхронных двигателей. Разработка подходящих алгоритмов управления асинхронными двигателями широко исследуется более двух десятилетий. С самого начала полевого управления приводами переменного тока, рассматриваемого как жизнеспособная замена традиционных приводов постоянного тока, в различных контурах управления схемы FOC использовалось несколько методов из теории линейного управления, таких как пропорционально-интегральные (ПИ) регуляторы и их точная обратная связь. линеаризация.и из-за этих линейных характеристик методы не гарантируют подходящую работу машины во всем рабочем диапазоне и не учитывают изменения параметров установленной нагрузки двигателя. Методы основаны на сложных стратегиях управления, отличающихся от описанных здесь передовых методов управления. Метод осуществляется путем регулировки ширины импульса и скважности импульса для установки среднего напряжения. Технология PWM сопровождается развитием электронных силовых устройств, имеет хорошее развитие, и теперь это созрело.При использовании метода ШИМ форма выходного сигнала инвертора может быть улучшена для минимизации гармоник и пульсаций выходного крутящего момента. Метод уменьшает конструкцию инвертора для ускорения уровня настройки и увеличения динамического отклика системы. В области электрического движения двигатель очень важен для завершения двигателя с регулируемой скоростью.
Приводы асинхронных двигателейАсинхронный двигатель имеет два типа обмоток: обмотки статора и ротора.Обмотки рассчитаны на трехфазную индукционную систему. Асинхронный двигатель обычно работает в приводах с регулируемой скоростью. На обмотку статора подается трехфазное переменное напряжение со сбалансированным напряжением. Статор индуцировал в роторе магнитный поток в качестве основного трансформатора. Значение оборотов и крутящий момент асинхронного двигателя можно установить с помощью
.- Путем управления напряжением статора.
- Путем управления напряжением ротора.
- Путем управления частотой.
- Путем управления напряжением и частотой статора.
- Путем управления током статора.
- Путем управления напряжением, током и частотой.
Обороты и крутящий момент, которые мы получаем, контролируя ток и частоту напряжения рабочего цикла, очень важны
Целью данной статьи является управление частотой вращения асинхронного двигателя путем регулирования напряжения статора. Этот метод может быть реализован путем использования метода широтно-синусоидальной модуляции импульса через универсальный мостовой компонент и ПИД-регулятор.
Инвертор / Трехфазный преобразователь постоянного тока в переменныйТрехфазный преобразователь постоянного тока в переменный (инвертор) большой мощности широко используется для преобразователей частоты. Основное правило трехфазного преобразователя постоянного тока в переменный, состоящего из 3 однофазных переключателей, подключенных к одному из трех портов терминала нагрузки.
Инвертор — это схема, которая используется для преобразования источника постоянного напряжения в источник переменного напряжения. Используемые силовые полупроводниковые компоненты могут быть в виде транзисторов SCR и полевых МОП-транзисторов, которые работают как переключатели и преобразователи.3-х фазный инвертор может быть показан на рисунке ниже
Судя по процессу преобразования, инверторы можно разделить на 3 типа, а именно инверторы
Мостовые инверторы делятся на полуволновые мостовые инверторы и полноволновые мосты. В результате выходное напряжение может быть однофазным или трехфазным.
Принцип работы трехфазного асинхронного двигателя: —Принцип трехфазного асинхронного асинхронного двигателя немного отличается от однофазного.Статор удерживает трехфазную обмотку, которая перемещается в пространстве на 120 градусов, когда трехфазное питание подается на обмотку статора, в статоре создается вращающийся магнитный поток (вращающийся с синхронной скоростью).
Трехфазные статоры и роторы считаются двумя основными частями трехфазного асинхронного двигателя переменного тока. Когда фаза статора получает питание от трехфазного источника переменного тока, в статоре генерируется ток. Магнитное поле, создаваемое трехфазными токами статора, всегда непрерывно вращается с изменениями тока.Это вращающееся магнитное поле разрезает ротор, и возникающий в нем ток взаимодействует с вращающимся магнитным полем. Таким образом создается магнитный момент, который заставляет ротор вращаться на рисунке. Значит, частота вращения ротора должна быть меньше вращающегося магнитного поля n0. Обратное вращение ротора будет реализовано с помощью сменной 3-фазной позиции ресурса.
Это направление совпадает с фазным током, а значение скорости пропорционально частоте и обратно пропорционально номеру полярной пары.Вычисленная поминутная скорость вращающегося магнитного поля n0 может быть представлена этим уравнением
no = синхронная частота вращения в об / мин
f = частота источника питания в Гц
А p = количество полюсов двигателя
Скорость вращения магнитного потока статора называется синхронной скоростью. Зависит от числа полюсов двигателя и частоты источника питания. Практическое поле по значению скорости ротора будет меньше синхронной скорости.Асинхронные двигатели также называются асинхронными двигателями, потому что значения скорости ротора отличаются от магнитного потока статора. Скольжение — это разница между скоростью ротора и вращением магнитного потока статора. Значение скольжения варьируется от 1% до примерно 6% скорости магнитного потока статора.
Значение слипа,
Значение частоты вращения ротора,
𝑛 = 𝑛0 (1 — 𝑠) 𝑟𝑝𝑚
n0 = скорость потока статора в об / мин
n = значение частоты вращения ротора в об / мин
с = значение скольжения в о.е.
Источник переменного тока, подаваемый на двигатель через обмотки статора, и магнитный поток статора вращаются в одном направлении с источником питания.
ПИД-регуляторСистемы ПИД-регулирования наиболее широко используются в индустрии систем управления. Успех ПИД-регулятора зависит от его точности определения константы ПИД. В процессе практического определения константы PID основаны на человеческом опыте на основе правил, называемых эмпирическими правилами. Исходя из полученного результата, эта константа PID использовалась для дальнейшего управления. Конечно, у него есть недостатки, потому что эта константа одинакова для каждого значения ошибки, которая возникает, и требует сброса настройки, если есть изменения в параметрах объекта в константе ПИД.Чтобы преодолеть это, необходим метод, позволяющий точно определять константу ПИД-регулятора в соответствии с установкой. Производительность ПИД-регулирования можно улучшить. На этом рис. Показан принцип работы ПИД-регулятора.
Общие свойства, используемые при регулировании промежуточной системы, другие включают стабильность, точность, скорость отклика и чувствительность. В действующем пропорциональном управлении выход системы управления будет пропорционален входу. Выходной сигнал — это усиление сигнала ошибки определенными факторами. Коэффициент усиления — это пропорциональная константа системы, которая выражается через Kp.Здесь КП имеет высокую скорость реакции. Интегральное управление выходом всегда изменяется во время отклонений, и скорость, с которой изменяется выход, пропорциональна отклонению, константе, выраженной как Ki, и где Ki имеет высокую чувствительность, например за счет уменьшения ошибки, создаваемой сигналом обратной связи. Чем выше значение Ki, тем выше чувствительность, но время, необходимое для более быстрого достижения стабильности, и наоборот. Производное управление работает путем изменения отклонения скорости. Этот тип управления всегда используется вместе с пропорциональными и интегральными контроллерами.Эти константы выражены в Kd, где Kd влияет на стабильность системы из-за управляющего воздействия, способного уменьшить ошибки. Ожидается, что благодаря объединению этих действий ПИД-регулирования будет получен ответ с высоким уровнем стабильности.
Асинхронная машина (беличья клетка)У машины будет две функции: мотор или генератор. Индукционная машина имеет трехфазный асинхронный двигатель, такой как машина с фазным ротором (машина с короткозамкнутым ротором).Функция определяется значением крутящего момента от машины.
- Здесь машина будет работать как двигатель, когда значение Tm положительное.
- Машина будет работать как генератор, когда значение Tm отрицательное.
Инструментальная стоимость компонента машины измерена в таблице
.Таблица 1. Параметр асинхронного / асинхронного двигателя
| Номинальная мощность, напряжение (линейно-линейное), частота | 746 ВА, 380 В, 50 Гц |
| Сопротивление и индуктивность статора | 0.009961 Ом, 0,000867 H |
| Сопротивление и индуктивность ротора | 0,005837 Ом, 0,000867 H |
| Взаимная индуктивность | 0,03039 H |
| Инерция, коэффициент трения, пары полюсов | 0,4, 0,02187, 2 |
Универсальный мост представляет собой универсальный преобразователь напряжения для трехфазной сети.Он содержит 6 переключателей, которые соединены мостом. Универсальный мост может быть силовым компонентом электронных устройств
Значение измерения этого универсального моста может быть описано в таблице 2.
Таблица 2. Значение измерения компонентного блока универсального моста
| Приборы силовой электроники | IGBT / Диоды |
| Количество балок моста | 3 |
| Снарядное сопротивление | 1e5 Ом |
| Снапряженная емкость | инф |
| Рон | 1e-3 Ом |
| Tf, Tt | 1e-6 с, 1e-6 с |
Генератор ширины импульса
Широтно-импульсная модуляция (ШИМ) — это простой способ манипулировать шириной сигнала, выраженной импульсами за период, для получения другого среднего напряжения.Примерами приложений PWM являются модуляция данных для телекоммуникаций, управляющая мощностью или напряжением, поступающим на регуляторы напряжения нагрузки, звуковыми эффектами и усилением, а также для других целей. Самый простой способ генерации ШИМ-сигнала — это сравнение пилообразного сигнала как несущего напряжения с опорным напряжением с использованием схемы компаратора операционного усилителя. Работа этого аналогового компаратора заключается в сравнении пилообразных волн напряжения с эталонными напряжениями. И когда опорное напряжение больше, чем напряжение несущей (пилообразной формы), выход компаратора будет высоким.Когда опорное напряжение меньше, чем напряжение несущей, выход компаратора будет низким. Используя принцип работы этого компаратора, чтобы изменить рабочий цикл выходного сигнала, достаточно изменить опорное напряжение.
Система без обратной связиСистема незамкнутого цикла состоит из 4 основных компонентов. Это универсальный мостовой ШИМ-генератор постоянного тока и Асинхронная машина. В разомкнутой системе у них нет обратной связи для управления скоростью. Так как скорость зависит от величины постоянного напряжения питания.Система управления с разомкнутым контуром традиционно используется в некоторых асинхронных двигателях. Элемент управления прост, потому что содержит несколько компонентов для реализации
Система с обратной связьюУсовершенствование разомкнутой системы замкнутой системы. Система замкнутого цикла состоит из основного компонента f5. Этими компонентами являются управляемый источник напряжения, блок ПИД-регулятора, универсальный мостовой блок, блок генератора ШИМ и асинхронный двигатель, датчик скорости системы с замкнутым контуром, используемый в качестве сигнала обратной связи для задания уставки.Требуемая ошибка — это разница между фактической скоростью и уставкой оборотов в минуту. ПИД обрабатывает эту ошибку как сигнал управления контролируемым источником напряжения.
Источник управляемого напряжения вырабатывает переменное выходное напряжение постоянного тока в качестве входного сигнала для универсального моста.
Универсальный мост для преобразования постоянного напряжения в переменное от управляемого источника напряжения. Мост генерирует трехфазное напряжение для питания асинхронного двигателя. Скорость асинхронного двигателя определяется величиной трехфазного напряжения и частотой выходного универсального моста.Скорость регулируется для получения ближайшего значения, основанного на заданной скорости об / мин.
Результаты и обсуждениеЗдесь результаты напряжения фазы напряжения сети тока в линии перечислены вместе со скоростью и результатами крутящего момента асинхронного двигателя на следующем рисунке
Результаты разомкнутой системы
Напряжение на выходе инвертора составляет 380 В переменного тока. Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель вырабатывает ток статора 35 А. Ток равен каждой фазе, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1500 об / мин. И ответ системы разомкнутого контура может быть показан из этого рисунка. Реакция разомкнутой системы: время нарастания (tr) = 0,7 с, время задержки (td) = 0,55 с, время пика (tp) = 0,73 с и время установившегося состояния (ts) = 0,9 с.
Результаты системы с обратной связью
Напряжение на выходе инвертора составляет 85 В переменного тока.Асинхронный двигатель использует это напряжение для работы в соответствии с номинальным напряжением.
Асинхронный двигатель вырабатывает ток статора 30 А. Ток равен каждой фазе, потому что асинхронный двигатель является сбалансированной нагрузкой.
Таким образом, установившаяся скорость асинхронного двигателя составляет 1420 об / мин. Реакция замкнутой системы может быть показана на этом рисунке. Реакция системы с обратной связью: время нарастания (tr) = 0,02 с, время задержки (td) = 0,015 с, время пика (tp) = 0.025 с и время установившегося режима (ts) = 0,2 с.
ЗаключениеИз результатов следует, что управление асинхронным двигателем с помощью ПИД-регулятора и универсального моста дает лучший отклик, чем без ПИД-регулирования. В системе с разомкнутым контуром время достижения установившейся скорости составляет 0,9 секунды, в то время как в системе с замкнутым контуром время достижения установившейся скорости составляет 0,2 секунды. Это показывает, что ПИД-регулятор получил более быстрый отклик, чем без регулятора.Можно сделать вывод, что предлагаемая система обладает хорошей способностью управлять скоростью асинхронного двигателя.
Нравится:
Нравится Загрузка …
Трансформаторные трехфазные регуляторы скорости РСА5Д -…- Т
Регуляторы скорости серии РСА5Д-… Т применяются для регулирования производительности трехфазных вентиляторов посредством ступенчатого регулирования скорости.
Характеристики модели
- Описание
- Модификации
- Загрузки
Описание
Описание
| ПРИЛОЖЕНИЯ | ПРОЕКТИРОВАНИЕ И УПРАВЛЕНИЕ |
|
|
| КРЕПЛЕНИЕ | |
| |
| Рабочее положение прибора | |
Дизайн регулятора скорости для трехфазного асинхронного двигателя на основе алгоритма оптимизации динамической регулировки кузнечика | Альгамлуоли
Конструкция регулятора скорости для трехфазного асинхронного двигателя на основе алгоритма оптимизации с динамической регулировкой кузнечика
Аммар Фалах Альгамлуоли, Низар Хади Аббас
Аннотация
Трехфазный асинхронный двигатель (TIM) широко используется в промышленности, например, на бумажных фабриках, очистных сооружениях и очистных сооружениях в городских районах.В этих приложениях очень важна скорость TIM, которая не должна изменяться с крутящим моментом приложенной нагрузки. В этом исследовании моделируется прямой пуск двигателя (DOL) без контроллера для оценки реакции двигателя при прямом подключении к сети. Обычный ПИ-регулятор для постоянного тока статора и квадратурного тока статора асинхронного двигателя спроектирован как контроллер внутреннего контура, а второй традиционный ПИ-регулятор спроектирован во внешнем контуре для управления скоростью TIM.Предлагаемые комбинированные контроллеры с PI-выводом (CPIL) для внутреннего и внешнего контуров предназначены для улучшения общей производительности TIM по сравнению с обычным контроллером. В данной статье предлагается алгоритм оптимизации динамической настройки кузнечика (DAGOA) для настройки предлагаемого контроллера системы. Численные результаты, основанные на хорошо подобранной функции тестирования, демонстрируют, что DAGOA имеет лучшие характеристики с точки зрения скорости сходимости, точности решения и надежности, чем SGOA. Результаты исследования показали, что токи и скорость системы TIM, использующей CPIL-DAGOA, быстрее, чем система, использующая обычные контроллеры PI и CPIL, настроенные SGOA.Более того, регулятор скорости системы TIM со схемой управления CPIL на основе DAGOA достиг установившегося состояния быстрее, чем другие, при приложении момента нагрузки.
Ключевые слова
Контроллер CPIL; динамическая регулировка ГОА; статора постоянного тока; квадратурный ток статора эталон ГОА; трехфазный асинхронный двигатель прямого подключения
DOI: http://doi.org/10.11591/ijece.v11i2.pp1143-1157
Эта работа находится под лицензией Creative Commons Attribution-ShareAlike 4.0 Международная лицензия.
Международный журнал электротехники и вычислительной техники (IJECE)
p-ISSN 2088-8708, e-ISSN 2722-2578
Трехфазный преобразователь частоты с пакетом управления скоростью электродвигателя
Бесплатная доставка по всей Австралии! Никаких эксклюзивных зон!
ПЛАТЕЖНАЯ ПОЛИТИКА
- PayPal
- Банковский депозит
- Покупатели
- увидят номер банковского счета при оформлении заказа
- Оплата при получении на нашей стойке
ПОЛИТИКА ОТПРАВКИ
Условия отгрузки и передачи:
1.Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом. В этом случае мы свяжемся с вами по вашему адресу электронной почты или номеру телефона на eBay.
2. Заказы обычно обрабатываются каждый рабочий день, кроме выходных. Обычно, если ваш платеж поступает после 15:00. или в выходные — на следующий рабочий день.
КОНТАКТНАЯ ИНФОРМАЦИЯ
1- На все наши продукты предоставляется гарантия 1 год, если не указано иное.Четко указано в налоговой накладной.
2- Все товары по гарантии / возврату должны сопровождаться уведомлением об одобрении возврата (RA). Пожалуйста, свяжитесь с нами по электронной почте или по телефону, чтобы получить разрешение на возврат.
Мы делаем это, чтобы свести к минимуму ошибки и недоразумения.
3- Любой предмет, возвращенный без примечания RA, не будет рассматриваться или контактировать и в конечном итоге будет отброшен. Это приведет к задержке подачи вашей претензии по гарантии.
Мы не несем ответственности за любые убытки, понесенные покупателем, отправившим немаркированный товар в наш магазин.Покупатель должен будет нести все расходы по обработке возвращенного товара.
В нашем магазине представлен широкий ассортимент двигателей (однофазных и трехфазных) и расходных материалов для большинства жилых, промышленных и коммерческих нужд. Посетите наш розничный и интернет-магазин, чтобы узнать больше о товарах. Доступны оптовые продажи.
Доставка
Условия и сроки доставки:
1. Наши заказы обычно отправляются в течение 24 рабочих часов после получения оплаты, если нет проблем с заказом.В этом случае мы свяжемся с вами по вашему адресу электронной почты или номеру телефона на eBay.
2. Заказы обычно обрабатываются каждый рабочий день, кроме выходных. Обычно, если ваш платеж поступает после 14:00. или в выходные — на следующий рабочий день.
ПОЛИТИКА ВОЗВРАТА
1- На все наши продукты предоставляется гарантия 1 год, если не указано иное. Четко указано в налоговой накладной.
2- Все товары по гарантии / возврату должны сопровождаться уведомлением об одобрении возврата (RA).Пожалуйста, свяжитесь с нами по электронной почте или по телефону, чтобы получить разрешение на возврат.
Мы делаем это, чтобы свести к минимуму ошибки и недоразумения.
3- Любой предмет, возвращенный без примечания RA, не будет рассматриваться или контактировать и в конечном итоге будет отброшен. Это приведет к задержке подачи вашей претензии по гарантии.
Мы не несем ответственности за любые убытки, понесенные покупателем, отправившим немаркированный товар в наш магазин. Покупатель должен будет нести все расходы по обработке возвращенного товара.
УПРАВЛЕНИЕ СКОРОСТЬЮ ТРЕХФАЗНОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ С ПОМОЩЬЮ ИНВЕРТОРА ШИМ
(1)IJEDR1401089
Международный журнал инженерных разработок и исследований (www.ijedr.org)503
Регулировка скорости трехфазного асинхронного двигателя
Использование инвертора PWM
1
Джатин Дж. Патель,
2А.М. Кубават,
3М.Б. Джала
1 аспирант (M.E. Power System), 2 доцент, 3 доцент Кафедра электротехники, Государственный инженерный колледж, Бхудж, Индия
1 [email protected] , 2 amkubavat @ rediffmail.com , 3 [email protected] ______________________________________________________________________________________
Abstract — Существуют различные методы управления скоростью трехфазного асинхронного двигателя и управления скоростью трехфазного Асинхронный двигатель обычно использует стратегию управления U / F. Из ряда методов регулирования скорости индукции, например, полюс изменение, изменение частоты, переменное сопротивление ротора, переменное напряжение статора, постоянное управление U / f, метод восстановления скольжения и т. Д., модель Наиболее часто используется метод регулирования постоянной скорости U / f . В этом методе отношение V / f поддерживается постоянным, что, в свою очередь, поддерживает постоянный магнитный поток, так что максимальный крутящий момент остается неизменным. Таким образом, в этом методе полностью используется двигатель.
Эта статья включает в себя моделирование управления скоростью U / F трехфазного асинхронного двигателя с использованием стратегии инвертора PWM. Моделирование
Работаподтверждает идею управления напряжением / частотой с помощью инвертора PWM, а программное обеспечение, используемое для моделирования, — PSIM (Powersim).Производительность , стратегия вольт на герц была оценена посредством моделирования, показанного в результатах. При постоянном управлении U / F, используя инвертор PWM, мы можем изменяют напряжение питания, а также частоту питания таким образом, чтобы отношение V / F оставалось постоянным, так что магнитный поток тоже остается постоянным. Таким образом, мы можем получить разные рабочие зоны для разных скоростей и крутящих моментов, а также мы можем получить различную синхронную скорость с почти тот же максимальный крутящий момент.Таким образом, двигатель полностью загружен, а также у нас есть широкий выбор регуляторов скорости. Легко и экономично до проще спроектировать в разомкнутом контуре. Но недостатком разомкнутого контура является то, что он не корректирует изменение производительности, а также не достигает стабильного уровня . состояние быстро .
Условное обозначение — Асинхронный двигатель, регулирование скорости, метод V / F, инвертор PWM
I. ВВЕДЕНИЕ
Технические приводы обычно подразделяются на приводы с постоянной и регулируемой скоростью.обычно машины переменного тока использовались в приложениях с постоянной скоростью, тогда как машины постоянного тока были выбраны для приводов с изменяемой скоростью. Машины постоянного тока имеют недостатки, заключающиеся в более высокой стоимости и проблемах с защитой коммутаторов и щеток. Коммутаторы и щетки не разрешить машине работать в нечистой и взрывоопасной среде. Машина переменного тока решает проблему машин постоянного тока. Хотя в настоящее время в большинстве приводов с регулируемой скоростью используются машины постоянного тока, их все больше и больше заменяют Приводы переменного тока.Хотя существуют различные методы управления скоростью асинхронного двигателя, можно использовать переменное напряжение, переменную частоту или V / F. самый обыкновенный способ регулирования скорости. Этот метод наиболее подходит для приложений, не требующих управления положением или необходимость высокой точности регулирования скорости. Примеры этих приложений включают отопление, кондиционирование воздуха, вентиляторы и воздуходувки.
Будь то бытовое применение или инженерное дело, управление движением требуется повсюду. Системы, которые работают по этой идее называются приводами.Такая система, если в ней используются электродвигатели, называется электроприводом. В электрическом приводов, используются различные датчики и алгоритмы управления, чтобы управлять скоростью двигателя, используя соответствующий метод управления скоростью. В прошлом только двигатели постоянного тока были эффективны для приводов, требующих переменной скорости, из-за простоты их методов управления скоростью. В традиционные методы управления скоростью асинхронного двигателя были либо слишком дорогими, либо слишком неэффективными, что ограничивало их применение только для приводов с постоянной скоростью.Однако современные тенденции и увеличение способов регулирования скорости асинхронного двигателя значительно улучшили использование асинхронных двигателей в электрических приводах. [1]
II. РАЗЛИЧНЫЕ МЕТОДЫ КОНТРОЛЯ СКОРОСТИ
Трехфазный асинхронный двигатель в основном представляет собой двигатель с постоянной скоростью, поэтому контролировать его скорость довольно непросто. Контроль скорости Асинхронный двигатель выполнен за счет снижения КПД и низкого коэффициента мощности. Прежде чем обсуждать методы контроля скорость трехфазного асинхронного двигателя: необходимо знать необходимые формулы скорости и крутящего момента трехфазного асинхронного двигателя. так как методы регулирования скорости зависят от этих формул [7]
Синхронная скорость, Ns = (2.1) Где f = частота, а P — количество полюсов.
Скорость асинхронного двигателя определяется выражением N = Ns (1-s) (2.2)
Где, N — частота вращения ротора асинхронного двигателя. Ns — синхронная скорость
S — это накладка
Статор и ротор с обеих сторон изменяли скорость асинхронного двигателя. [12]
(I) Регуляторы скорости на стороне статора дополнительно классифицируются как: 1. Управление V / F или частотное регулирование
(2)IJEDR1401089
Международный журнал инженерных разработок и исследований (www.ijedr.org)504
3. Регулировка напряжения питания
4. Добавление реостата в цепь статора
(II) Регуляторы скорости со стороны ротора дополнительно классифицируются как: 1. Добавление внешнего сопротивления на стороне ротора
2. Каскадный метод управления.
3. Подача ЭДС частоты скольжения в сторону ротора. III.V / F КОНТРОЛЬ ИЛИ ЧАСТОТА
Когда трехфазное питание подается на трехфазный асинхронный двигатель, создается вращающееся магнитное поле, которое вращается с синхронная скорость, указанная в (2.1)
Ns =
В трехфазном асинхронном двигателе ЭДС индуцируется индукцией, как у трансформатора, которая определяется выражением
E или V = 4.44ØKT.f или Ø =
(3,1)
Теперь, если мы изменим частоту, синхронная скорость изменится, но с уменьшением частоты и магнитного потока увеличится, и это будет меняться в зависимости от значение магнитного потока вызывает насыщение сердечников ротора и статора, что в дальнейшем приведет к увеличению тока холостого хода двигателя.Его ключ чтобы поддерживать постоянный поток Φ, и это возможно только при изменении напряжения. то есть, если мы уменьшаем частоту, поток увеличивается, но на В то же время, если мы уменьшим напряжение, поток также уменьшится, не вызывая изменения потока, и, следовательно, он останется стабильным.
Здесь мы сохраняем отношение V / F постоянным. Отсюда его название — метод V / F. Для управления скоростью трехфазного асинхронный двигатель методом V / F, мы должны подавать переменное напряжение и частоту, которые легко достигаются с помощью преобразователя и инверторный комплект.
IV. ИНДУКЦИОННОЕ УПРАВЛЕНИЕ ИМПУЛЬСНЫМ ШИРОМ (ШИМ) MOTORDRIVEOVERVIEW
Создание мощных устройств с быстрым переключением и быстрых микропроцессоров способствовало расширению регулируемой скорости. системы привода асинхронных двигателей. Система привода индукционного двигателя состоит из преобразователя частоты и контроллера. и индукционная машина. Блок-схема на рисунке 1 демонстрирует, как наиболее важные компоненты индукции система привода станка работает взаимно
.
ВХОД ПЕРЕМЕННОГО ТОКА
КОМАНДНЫЙ СИГНАЛ
Рис. 1 Структурная схема привода асинхронного двигателя
Разработан для постоянного регулирования скорости, частота возбуждения должна изменяться, а поток в воздушном зазоре должен поддерживаться. постоянным путем управления величиной приложенного напряжения в зависимости от частоты возбуждения. Подача напряжения переменной величины и частоты для асинхронного двигателя требуется преобразователь частоты.
Преобразователь частотыClassic состоит из выпрямителя, промежуточного звена постоянного тока и инвертора. Есть две фундаментальные классификации инверторы, используемые в приводах асинхронных двигателей с регулируемой скоростью: инверторы источника тока и инверторы источника напряжения. Источник тока инвертор больше подходит для высоких уровней мощности. В большинстве приводов меньшего размера используется инвертор источника напряжения, ширина импульса которого модулированный (ШИМ) инвертор популярен. [6]
Управление скоростью асинхронного двигателя с помощью микроконтроллерного инвертора с ШИМ.
В данной работе используется микроконтроллер для активации асинхронного двигателя с использованием метода V / F. Различные факторы, которые сделать систему на основе микроконтроллера умной,
(1) Простота исполнения в частотно-регулируемых приводах (2) Лучшая надежность и большая гибкость.
(3) Небольшая стоимость и высокая точность
(4) Возможна регулировка характеристик крутящего момента и скорости привода с помощью программного обеспечения. [1]
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ I.М.
(3)IJEDR1401089
Международный журнал инженерных разработок и исследований (www.ijedr.org)505
Преимущество использования инвертора PWM на базе микроконтроллера для управления скоростью асинхронного двигателя.(1) Изменение частоты ШИМ в любое время
(2) Скорость двигателя можно плавно регулировать.
(3) Базовая частота 50 Гц и 60 Гц одинаково применимы для инвертора.
(4) Ускорение или замедление двигателя можно контролировать, и можно изменить направление двигателя в любое время.
(5) В оперативном и автономном режимах можно изменить индекс модуляции и повышение напряжения, поэтому можно контролировать выходное напряжение.
(5) Можно контролировать напряжение на шине постоянного тока инвертора.
(6) В проектируемой схеме средства резистивного отключения, контроля неисправностей [3] V.PWMINVERTER ДЛЯ ДВИГАТЕЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ
V / F-метод управления скоростью смоделирован в программном обеспечении PSIM.Реальную систему можно смоделировать с высокой степенью правильность в этом пакете. Он предоставляет пользователю интерактивную платформу. В этой главе обсуждается реализация управления V / F с использованием Блок Simulink.
На Рис. 2 показана схема моделирования V / F-управления трехфазным асинхронным двигателем без обратной связи. Он состоит из источника постоянного тока (амплитуда 500), трехфазный инвертор PWM и трехфазный асинхронный двигатель. Источник постоянного тока подключается к стороне постоянного тока конвертер.Здесь устанавливается эталонная скорость. Исходя из этой опорной скорости, частота определяется по формулам, показанным на уравнение (2.1). Эта частота и амплитуда используются для обновления рабочего цикла ШИМ. Конвертер на основе MOSFET дает поставка асинхронного двигателя
.
РИС. 2 Схема моделирования V / F-управления трехфазным асинхронным двигателем с разомкнутым контуром VI. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Рис. 3 Форма кривой выходной скорости
0 0,2 0,4 0.6 0,8
Время (с) 0
-200 200 400 600 800 1000 1200
(4)IJEDR1401089
Международный журнал инженерных разработок и исследований (www.ijedr.org)506
На рис. 3 показана смоделированная форма кривой скорости V / F-регулирования разомкнутого контура трехфазного асинхронного двигателя. Скорость достигает установившееся состояние на 0,3 секунды.
Рис. 4 Кривая крутящего момента
Рисунок: 4 показывает кривую крутящего момента. Постоянный крутящий момент механической нагрузки равен 40, а амплитуда D.Источник C 500
РИС. 5 Сравнение несущей и опорной волны и стробирующего импульса V1 и V2
Сравнение между формой несущей и опорной волны показано на рисунке: 5, а также показывает генерирующий V1 (стробирующий импульс). 1) и формы волны V2 (стробирующий импульс 2).
0 0,2 0,4 0,6 0,8
Время (с) 0
-100 100 200 300 400
МОМЕНТ
0,6 0,65 0,7 0,75 0,8
Время (с) 0
-0,5
-1 0.5 1
НОМЕР ПЕРЕВОЗЧИКА
0,6 0,65 0,7 0,75 0,8
Время (с) 0
0,2 0,4 0,6 0,8 1
V1
0,6 0,65 0,7 0,75 0,8
Время (с) 0
0,2 0,4 0,6 0,8 1
(5)IJEDR1401089
Международный журнал инженерных разработок и исследований (www.ijedr.org)507
Рисунок: 6 Форма кривой тока I1, I2, I3
Наконец, мы показываем форму волны тока на рисунке: 6, которая измеряется с помощью датчиков тока I1, I2, I3 на диаграмме моделирования.I1 представляют фаза 1 и I2, I3 представляют фазу 2 и фазу 3 соответственно
В этой статье описывается моделирование V / F-управления асинхронным двигателем с использованием PSIM и представлены результаты моделирования. Из На полученных выходных данных четко видно, что время, необходимое для сигнала скорости для управления разомкнутым контуром, достигает установившегося состояния в 0,3 секунды.
VII.ЗАКЛЮЧЕНИЕ
В этой статье, постоянное управление U / F, с помощью инвертора PWM, мы можем изменять напряжение питания, а также частоту питания, например что отношение V / F остается постоянным, так что поток также остается постоянным.мы можем получить разные рабочие области для разных скорости и крутящие моменты, а также мы можем получить различную синхронную скорость с примерно одинаковым максимальным крутящим моментом. Это простой, экономичный или простой в разработке в открытом контуре. Но недостатки разомкнутого цикла в том, что он не позволяет точно определить кроме того, он не достигает устойчивого состояния быстро. Из результатов ясно видно, что время, затраченное на скорость форма волны достигает устойчивого состояния в 0.3 секунды.
ССЫЛКИ
[1] Госпожа Дипали С. Ширке, профессор Госпожа Хариприя, Х.Кулкарни Февраль 2013 г. «Трехфазное управление скоростью на основе микроконтроллера. асинхронный двигатель с использованием метода v / f », Международный научно-исследовательский журнал, том 3, выпуск 2, [2] Падмараджа Йедамале «Регулирование скорости трехфазного асинхронного двигателя с использованием микроконтроллеров PIC 18», Microchip
Technology Inc.
[3] М.А. Латиф, М.Дж. Алам, М. А. Рашид, А. Карим, Н. Х. Рамли, И. Даут, «Инвертор PWM на базе микроконтроллера для Регулирование скорости трехфазного асинхронного двигателя », Международный инженерно-технический журнал (IJET)
[4] А.Али Казалбаш, Авайс Амин, Абдул Манан и Махвин Халид, 2009 г. «Разработка и внедрение микроконтроллера. основанная на методе ШИМ для синусоидального инвертора », Лиссабон, Португалия, 2009 г.
[5] S.M. Wankhede, R.M.Holmukhe, Miss.A.M.Kadam, Miss.P.R shinde, p.s. Chaudhari 2011 «Управление на основе микроконтроллера. трехфазного асинхронного двигателя с использованием метода ШИМ », Международная конференция« Электроэнергетика и сети. [6] Ли Пэн, Юн Кан, Сюэцзюнь Пей и Цзян Чен, 2007. «Новая техника ШИМ в цифровом управлении», транзакции IEEE
по промышленной электронике, т. 54, нет. 1
[7] Атул М. Гаджаре, Нитин Р. Бхасме, 2012 «Обзор методов управления скоростью однофазного асинхронного двигателя», Международный журнал компьютерных технологий и электронной инженерии (IJCTEE) Том 2, Выпуск 5
[8] Б.Н. Джамадар, д-р С. Р. Кумбхар и Д. С. Сутрав, 2013 «Трехфазное управление скоростью на базе микроконтроллера PIC. Асинхронный двигатель с однофазным питанием », IJRCSIT I ISSN No.: 2319-5010 I Vol. 1 I Выпуск 1 (A) I.
[9] Налин Кант Моханти, Ранганат Мутху, 2010 «Трехфазный инвертор на базе микроконтроллера с ШИМ-управлением с четырьмя переключателями. Привод индукционного электродвигателя с питанием от электросети », сербский журнал по электротехнике. 7, № 2, 195-2047
[10] Bimal.K.Bose 1982, «Обзор состояния технологии привода переменного тока с регулируемой скоростью», IEEE Proceedings, Vol.70, стр 2-6,
[11] Дж. А. Хулдсворт и У. Росинк, 1980 «Введение в систему управления скоростью ШИМ для трехфазных двигателей переменного тока». Электронные компоненты и приложения, Vol. 2, №2.
[12] С. Гош, Управление скоростью трехфазного асинхронного двигателя http://www.electrical4U.com/speed-control-of-three-phase- Индукционный двигатель/
0,6 0,65 0,7 0,75 0,8
Время (с) 0
-10
-20
-30 10 20 30
Методы регулирования скорости асинхронного двигателя
Асинхронный двигатель практически представляет собой двигатель с постоянной скоростью, что означает, что для всего диапазона нагрузок изменение скорости двигателя довольно мало.Скорость параллельного двигателя постоянного тока можно очень легко изменять с хорошим КПД, но в случае асинхронных двигателей снижение скорости сопровождается соответствующей потерей эффективности и низким коэффициентом мощности. Поскольку асинхронные двигатели широко используются, регулирование их скорости может потребоваться во многих приложениях. Различные методы управления скоростью асинхронного двигателя объясняются ниже.Регулировка скорости асинхронного двигателя со стороны статора
1. Путем изменения подаваемого напряжения:
Из уравнения крутящего момента асинхронного двигателя,Сопротивление ротора R 2 постоянно, и если скольжение s небольшое, то (sX 2 ) 2 настолько мало, что им можно пренебречь.Следовательно, T ∝ sE 2 2 , где E 2 — ЭДС, индуцированная ротором, а E 2 ∝ V
Таким образом, T ∝ sV 2 , что означает, что если подаваемое напряжение уменьшается, развиваемый крутящий момент уменьшается. Следовательно, для обеспечения того же момента нагрузки скольжение увеличивается с уменьшением напряжения, и, следовательно, скорость уменьшается. Этот метод самый простой и дешевый, но до сих пор используется редко, потому что
- требуется большое изменение напряжения питания для относительно небольшого изменения скорости.
- большое изменение напряжения питания приведет к большому изменению плотности потока, следовательно, это нарушит магнитные условия двигателя.
2. Изменяя применяемую частоту
Синхронная скорость вращающегося магнитного поля асинхронного двигателя равна,. где f = частота питания и P = количество полюсов статора.
Следовательно, синхронная скорость изменяется с изменением частоты питания. Фактическая скорость асинхронного двигателя определяется как N = Ns (1 — s) .Однако этот метод не получил широкого распространения. Его можно использовать там, где асинхронный двигатель питается от специального генератора (так что частоту можно легко изменять, изменяя скорость первичного двигателя). Кроме того, при более низкой частоте ток двигателя может стать слишком большим из-за пониженного реактивного сопротивления. А если частота превышает номинальное значение, максимальный развиваемый крутящий момент падает, а скорость увеличивается.
3. Постоянное регулирование U / F асинхронного двигателя
Это самый популярный метод управления скоростью асинхронного двигателя.Как и в описанном выше методе, если частота питания снижается при сохранении номинального напряжения питания, поток в воздушном зазоре стремится к насыщению. Это вызовет чрезмерный ток статора и искажение магнитной волны статора. Следовательно, напряжение статора также должно быть уменьшено пропорционально частоте, чтобы поддерживать постоянный магнитный поток в воздушном зазоре. Величина потока статора пропорциональна отношению напряжения статора к частоте. Следовательно, если отношение напряжения к частоте остается постоянным, магнитный поток остается постоянным.Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую эффективность во время выполнения. Поэтому в большинстве приводов переменного тока для управления скоростью используется метод постоянного напряжения / частоты (или метод переменного напряжения и переменной частоты). Наряду с широким диапазоном регулирования скорости, этот метод также предлагает возможность «плавного пуска».4. Изменение количества полюсов статора
Из приведенного выше уравнения синхронной скорости можно увидеть, что синхронная скорость (и, следовательно, скорость движения) может быть изменена путем изменения количества полюсов статора.Этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор с короткозамкнутым ротором адаптируется к любому количеству полюсов статора. Смена полюсов статора достигается двумя или более независимыми обмотками статора, намотанными на разное количество полюсов в одинаковых пазах.Например, статор намотан с двумя 3-фазными обмотками, одна на 4 полюса, а другая на 6 полюсов.
для частоты питания 50 Гц
i) синхронная скорость при подключении 4-х полюсной обмотки, Ns = 120 * 50/4 = 1500 об / мин
ii) синхронная скорость при подключении 6-полюсной обмотки, Ns = 120 * 50/6 = 1000 об / мин
Регулировка скорости со стороны ротора:
1.Регулировка реостата ротора
Этот метод аналогичен управлению реостатом якоря параллельного двигателя постоянного тока. Но этот метод применим только к электродвигателям с фазным ротором, так как добавление внешнего сопротивления в ротор электродвигателей с короткозамкнутым ротором невозможно.2. Каскадный режим
В этом методе регулирования скорости используются два двигателя. Оба установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель питается от трехфазного источника питания, а другой двигатель получает питание от наведенной ЭДС в первом двигателе через контактные кольца.Расположение показано на следующем рисунке.Двигатель A называется основным двигателем, а двигатель B — вспомогательным двигателем.
Пусть, N s1 = частота двигателя A
N s2 = частота двигателя B
P 1 = количество полюсов статора двигателя A
P 2 = количество полюсов статора двигателя B
N = скорость установки и одинаковая для обоих двигателей
f = частота питания
Теперь скольжение двигателя A, S 1 = (N s1 — N) / N s1 .
частота ЭДС, индуцированная ротором в двигателе A, f 1 = S 1 f
Теперь на вспомогательный двигатель B подается ЭДС индукции ротора
, следовательно, N s2 = (120f 1 ) / P 2 = (120S 1 f) / P 2 .
теперь ставим значение S 1 = (N s1 — N) / N s1
я.е. N = N s2 .
из приведенных выше уравнений можно получить, что
С помощью этого метода можно получить четыре различных скорости
1. когда работает только двигатель A, соответствующая скорость = .Ns1 = 120f / P 1
2. когда работает только двигатель B, соответствующая скорость = Ns2 = 120f / P 2
3. если выполнено коммутационное каскадирование, скорость набора = N = 120f / (P 1 + P 2 )
4. Если выполняется дифференциальное каскадирование, скорость установки = N = 120f (P 1 — P 2 )