Регулятор оборотов коллекторного двигателя без потерь
 Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
 Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
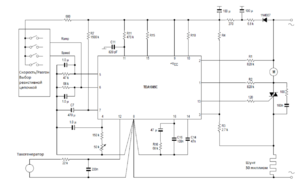
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
 Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
 Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
 Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
220v.guru
Регулятор оборотов электродвигателя без потери мощности
Плата регулировки оборотов коллекторных электродвигателей на микросхеме TDA1085, позволяет управлять двигателями без потери мощности.Обязательным условием при этом является наличие таходатчика (тахогенератор) на электродвигателе, который позволяет обеспечить обратную связь мотора с платой регулировки, а именно с микросхемой. Если говорить более простым языком, что бы было понятно всем, происходит примерно следующее. Мотор вращается с каким-то количеством оборотов, а установленный таходатчик на валу электромотора эти показания фиксирует. Если вы начинаете нагружать двигатель, частота вращения вала естественно начнет падать, что так же будет фиксировать таходатчик. Теперь рассмотрим дальше. Сигнал с этого таходатчика поступает на микросхему, она видит это и дает команду силовым элементам, добавить напряжение на электромотор.Таким образом, когда вы надавили на вал (даете нагрузку), плата автоматически прибавила напряжение и мощность на этом валу возросла. И наоборот, отпусти вал двигателя (сняли с него нагрузку), она увидела это и убавила напряжение. Таким образом обороты остаются не низменными, а момент силы (крутящий момент)постоянным. И самое что важное, вы можете регулировать частоту вращения ротора в широком диапазоне, что очень удобно в применении и конструировании различных устройств. Поэтому этот продукт, так и называется «Плата регулировки оборотов коллекторных двигателей без потери мощности».
Но мы увидели одну особенность, что эта плата применима только для коллекторных электродвигателей (с электрическими щетками). Конечно такие моторы в быту встречаются намного реже чем асинхронные. Но они нашли широкое применение в стиральных машинах автомат. Вот именно по этому была изготовлена эта схема. Специально для электродвигателя от стиральной машины автомат. Их мощность достаточно приличная, от 200 до 800 ватт. Что позволяет достаточно широко применить их в быту.
Данный продукт, уже нашел широкое применение в хозяйстве людей и широко охватил лиц занимающихся различным хобби и профессиональной деятельностью.
Отвечая на вопрос — Куда можно применить двигатель от стиральной машины? Был сформирован некоторый список. Самодельный токарный станок по дереву; Гриндер; Электропривод для бетономешалки; Точило; Электропривод для медогонки; Соломорезка; Самодельный гончарный круг; Электрическая газонокосилка; Дровокол и много другое где необходимо механическое вращение каких либо механизмов или предметов. И во всех этих случаях нам помогает эта плата «Регулировки оборотов электродвигателей с поддержанием мощности на TDA1085».
Краш-тест платы регулировки оборотов

3300 р.
elektroplata.ru
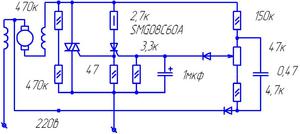
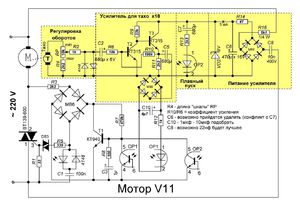
Регулятор скорости без потери мощности
Прекрасный для самоделок мотор от стиральной машины имеет слишком высокие обороты, и малый ресурс на максимальных оборотах. Поэтому я применяю простой самодельный регулятор оборотов (без потери мощности). Схема опробована и показала прекрасный результат. Обороты регулируются примерно от 600 до max.
Потенциометр электрически изолирован от сети, что повышает безопасность пользования регулятором.
Симистор необходимо поставить на радиатор.
Оптопара (2 шт) практически любая, но EL814 имеет внутри 2 встречных светодиода, и просится в эту схему.
Высоковольтный транзистор можно поставить, например, IRF740 (от БП компьютера), но жалко такой мощный транзистор ставить в слаботочную цепь. Хорошо работают транзисторы 1N60, 13003, КТ940.
Вместо моста КЦ407 вполне подойдет мост из 1N4007, или любой на >300V, и ток >100mA.
Печатка в формате .lay5. Печатка нарисована «Вид со стороны М2 (пайка)», так что при выводе на принтер ее надо зеркалить. Цвет М2 = черный, фон = белый, остальные цвета не печатать. Контур платы (для обрезки) выполнен на стороне М2, и будет указателем границ платы после травления. Перед запайкой деталей его следует удалить. В печатку добавлен рисунок деталей со стороны монтажа для переноса на печатку. Она тогда приобретает красивый и законченный вид.
Регулировка от 600 оборотов подходит для большинства самоделок, но для особых случаев предлагается схема с германиевым транзистором. Минимальные обороты удалось снизить до 200.
Минимальные обороты получил 200 об/мин (170-210, электронный тахометр на низких оборотах плохо меряет), транзистор Т3 поставил ГТ309, он прямой проводимости,и их много. Если поставить МП39, 40, 41, П13, 14, 15, то обороты должны еще снизиться, но уже не вижу надобности. Главное, что таких транзисторов как грязи, в отличие от МП37 (смотри форум).
Плавный пуск прекрасно работает, Правда на валу мотора пусто, но от нагрузки на валу при пуске, подберу R5 при необходимости.
R5 = 0-3к3 в зависимости от нагрузки;; R6 = 18 Ом — 51 Ом — в зависимости от симистора, у меня сейчас этого резистора нет;; R4 = 3к — 10к — защита Т3;; RР1 = 2к-10к — регулятор скорости, связан с сетью, защита от сетевого напряжения оператора обязательна. Есть потенциометры с пластмассовой осью, желательно использовать. Это большой недостаток данной схемы, и если нет большой необходимости в малых оборотах, советую использовать V17 (от 600 об/мин).
С2 = плавный пуск, = время задержки включения мотора;; R5 = заряд С2, = наклон кривой заряда, = время разгона мотора;; R7 — время разряда С2 для следующего цикла плавного пуска (при 51к это примерно 2-3 сек)

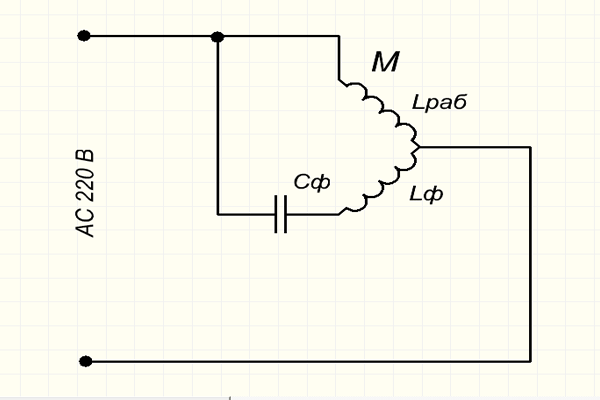
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.

Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
![]()
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
![]()
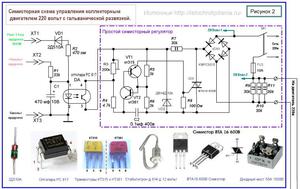
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
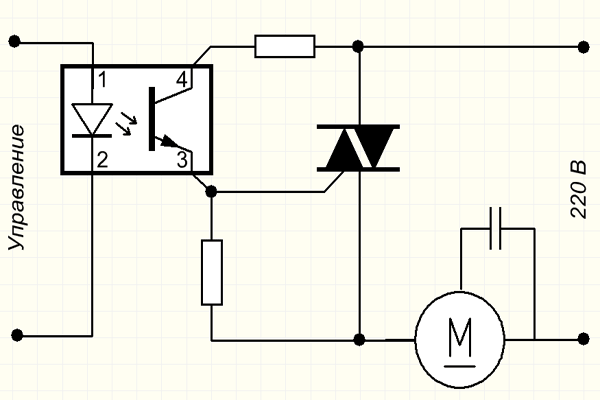
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.

Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением


Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
![]()
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
![]()
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
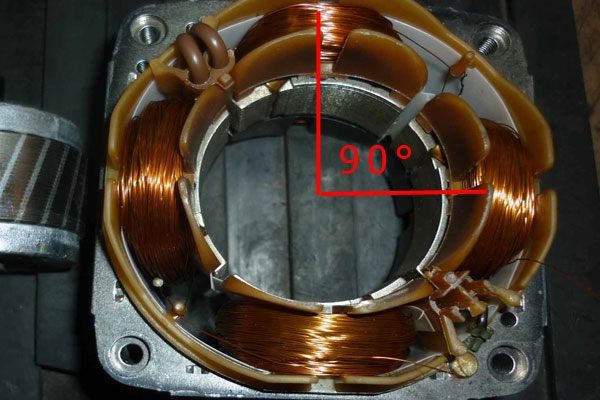
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
 Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Регулятор оборотов в двигателе нужен для совершения плавного разгона и торможения. Широкое распространение получили такие приборы в современной промышленности. Благодаря им происходит измерение скорости движения в конвейере, на различных устройствах, а также при вращении вентилятора. Двигатели с производительностью на 12 Вольт применяются в целых системах управления и в автомобилях.
Устройство системы
Коллекторный тип двигателя состоит главным образом из ротора, статора, а также щёток и тахогенератора.
- Ротор — это часть вращения, статор — это внешний по типу магнит.
- Щётки, которые произведены из графита — это главная часть скользящего контакта, через которую на вращающийся якорь и стоит подавать напряжение.
- Тахогенератор —это устройство, которое производит слежку за характеристикой вращения прибора. Если происходит нарушение в размеренности процесса вращения, то он корректирует поступающий в двигатель уровень напряжения, тем самым делая его наиболее плавным и медленным.
- Статор. Такая деталь может включать в себя не один магнит, а, к примеру, две пары полюсов. Вместе с этим на месте статических магнитов здесь будут находиться катушки электромагнитов. Совершать работу такое устройство способно как от постоянного тока, так и от переменного.
Схема регулятора оборотов коллекторного двигателя
 В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
В виде регуляторов оборотов электродвигателей 220 В и 380 В применяются особые частотные преобразователи. Такие устройства относят к высокотехнологическим, они и помогают совершить кардинальное преобразование характеристики тока (форму сигнала, а также частоту). В их комплектации имеются мощные полупроводниковые транзисторы, а также широтно-импульсный модулятор. Весь процесс осуществления работы устройства происходит с помощью управления специальным блоком на микроконтроллере. Изменение скорости во вращении ротора двигателей происходит довольно медленно.
Именно по этой причине частотные преобразователи применяются в нагруженных устройствах. Чем медленнее будет происходить процесс разгона, тем меньшая нагрузка будет совершена на редуктор, а также конвейер. Во всех частотниках можно найти несколько степеней защиты: по нагрузке, току, напряжению и другим показателям.
Некоторые модели частотных преобразователей совершают питание от однофазового напряжения (оно будет доходить до 220 Вольт), создают из него трехфазовое. Это помогает совершить подключение асинхронного мотора в домашних условиях без применения особо сложных схем и конструкций. При этом потребитель сможет не потерять мощность во время работы с таким прибором.
Зачем используют такой прибор-регулятор
Если говорить про двигатели регуляторов, то обороты нужны:
- Для существенной экономии электроэнергии. Так, не любому механизму нужно много энергии для выполнения работы вращения мотора, в некоторых случаях можно уменьшить вращение на 20−30 процентов, что поможет значительно сократить расходы на электроэнергию сразу в несколько раз.
- Для защиты всех механизмов, а также электронных типов цепей. При помощи преобразовательной частоты можно осуществлять определённый контроль за общей температурой, давлением, а также другими показателями прибора. В случае когда двигатель работает в виде определённого насоса, то в ёмкости, в которую совершается накачка воздуха либо жидкости, стоит вводить определённый датчик давления. Во время достижения максимальной отметки мотор попросту автоматически закончит свою работу.
 Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.
Для процесса плавного запуска. Нет особой необходимости применять дополнительные электронные виды оборудования — все можно осуществить при помощи изменения в настройках частотного преобразователя.- Для снижения уровня расходов на обслуживание устройств. С помощью таких регуляторов оборотов в двигателях 220 В можно значительно уменьшить возможность выхода из строя приборов, а также отдельных типов механизмов.
Схемы, по которым происходит создание частотных преобразователей в электродвигателе, широко используются в большинстве бытовых устройств. Такую систему можно найти в источниках беспроводного питания, сварочных аппаратах, зарядках телефона, блоках питания персонального компьютера и ноутбука, стабилизаторах напряжения, блоках розжига ламп для подсветки современных мониторов, а также ЖК-телевизоров.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
 Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
 Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
 Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
 Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
morflot.su
регулятор оборотов с поддержанием мощности
Здравствуйте дорогие мои посетители. Хочу сегодня продолжить тему о коллекторных электродвигателях, а именно как подключить двигатель от стиральной машины с помощью платы регулирования оборотов с поддержкой мощности. Как вы, видели, я затрагивал уже эту тему. Снимал по этому поводу видео «Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат». Это видео стало очень популярным на моём канале, зрители оставили множество разных комментариев по этой теме. Также я там выложил источник, где я взял схему регулятора оборотов с поддержкой мощности коллекторных электродвигателей. И как мне показалось на тот момент, что человек скачает себе этот файл и соберет себе такую же схему как у меня, и будет её использовать. Но нет, оказалось не все так просто как мне этого хотелось, посыпалась, куча вопросов от людей не только гуманитариев, но и совсем не плохих радиолюбителей. Были даже предложения о покупке плат регулирования оборотов.
Что бы сразу ответить на многие вопросы, Вам, мои дорогие читатели, и появилась эта статья.
Занимаюсь я ремонтом электроинструмента в частности перемоткой электродвигателей. И во время ремонта качественного электроинструмента замечал там «Константную электронику», которая при снижении оборотов на электроинструменте поддерживала мощность электродвигателя. Меня это очень заинтересовало, начал пробовать различные простые регуляторы оборотов, регуляторы оборотов с обратной связью по току, в общем, кучу разных штуковин. Пока не наткнулся на сайт «chipmaker.ru» где пользователь «Bogdan» выложил «схему управления коллекторным двигателем на TDA1085». Собственно говоря, вот эта ссылка: http://www.chipmaker.ru/files/file/1490/ . После того как Вы перешли, жмем на кнопку «Загрузить»В следующем окне обратно жмем «Загрузить»
У нас скачивается архив, разархивировав который, видим в нем несколько файлов (два варианта схем для управления двигателями постоянного и переменного тока с монтажными платами), нам для двигателя переменного тока нужны PSD файлы с пометкой «АС»
Распечатав их (принципиальная, монтажная и печатная плата), я отнес их своему очень хорошему товарищу Игорю , который мне спая регулятор оборотов с поддержкой мощности (сам я, к сожалению, не люблю работу с паяльником). Я испытал регулятор оборотов электроинструмента на TDA1085 на своей «болгарке». К счастью мой товарищ оказался хорошим радиолюбителем и нашел некоторые неточности в этих схемах и исправил их.
Я не могу вам сейчас сказать что этот регулятор оборотов коллекторных электродвигателей панацея, возможно, есть что-то и лучше я не знаю. Как поведет она себя на высоких или даже средних оборотах, честно сказать я не знаю( здесь уже можно посмотреть тест этой платы в разных режимах). Эта схема отлично ведет себя на низких оборотах, и вот уже целый год отлично себя показывает на Самодельном лобзиковом станке , приводом там служит та самая «болгарка» на которой я испытывал регулятор оборотов.
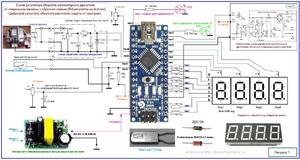
Если Вы уже собрались делать себе регулятор оборотов, давайте немного разберем его:
К клеммам «Фаза и Ноль» подключаем напряжение 220 Вольт (фазировка не влияет на работу схемы), светодиод «HL» служит нам индикатором питания платы регулятора оборотов, к клеммам « М1» подключаем наш электродвигатель, «таходатчик» который выдает постоянный ток подключаем к «Х3» а если же у вас он выдает переменный ток или импульсы, то к «Х2» (Как сделать таходатчик). К контактам «Х4» можно подключить тумблер (выключатель) который будет отключать наш двигатель, его ставить не обязательно, можно также отключать двигатель с помощью регулятора оборотов «R1» который подключается к контактам «Х1». У Bogdana на этой схеме не был указан конденсатор «С 100µF х25V» хотя он присутствует на монтажной плате (забыл указать). Также у него в схеме находится очень мощный симистор «ВТА41 800V» который подходит для управления мощными коллекторными электродвигателями, а для нас подойдет совсем другой на 10…16 Ампер (по цене будет на много дешевле). Симистор должен обязательно быть с радиатором (вся эта схема построена для управления этим симистором, который в свою очередь управляет непосредственно нашим электродвигателем). Ниже симистора на схеме указаны два мощных сопротивления «R31» и «R33» рассчитанные на 0,1 Ом и мощностью 5 Ватт каждый. Под каждые электродвигатель нужно индивидуально настраивать плату регулятора оборотов (как это сделать). Регулируется схема с помощью подстрочных сопротивлений «R3» и «R21». Построечный резистор «R3» регулирует плавность пуска двигателя, а «R21» служит для быстроты реагирования на нагрузку электродвигателя (в зависимости отнего схема будет реагировать плавно или резко на нагрузку).Для лучшего удобства я подготовил Вам список всех деталей, которые применяются в этом регуляторе оборотов с поддержкой мощности («+» обозначены полярные конденсаторы):
20кОм | Пременное 1шт | |
20кОм | Подстроечное 1шт | R3 |
| 1,2кОм 0,25-0,125W | 3шт | R4;5;9 |
| 160кОм 0,25-0,125W | 2шт | R6;8 |
| 24 Ом 0,25-0,125W | 1шт | R7 |
| 1м 0,25-0,125W | 1шт | R10 |
| 120кОм 0,25-0,125W | 1шт | R11 |
| 47кОм 0,25-0,125W | 1шт | R12 |
| 470кОм 0,25-0,125W | 1шт | R13 |
| 220кОм 0,25-0,125W | 1шт | R14 |
| 51 Ом 0,25-0,125W | 4шт | R15;19;25;30 |
| 2,2кОм 0,25-0,125W | 2шт | R16;22 |
| 68кОм 0,25-0,125W | 1шт | R17 |
| 820 Ом 0,25-0,125W | 1шт | R18 |
| 2,7кОм 0,25-0,125W | 1шт | R20 |
10кОм | Подстроечное 1шт | R21 |
| 390кОм 0,25-0,125W | 4шт | R23;24;28;29 |
1шт | R26 | |
1шт | R27 | |
1шт | 32 | |
2шт | R31;33 | |
1шт | R34 | |
1шт | 35 | |
3шт | С1;5;неуказанный | |
3шт | C2;8;9 | |
3шт | С3;4;7 | |
820р | 1шт | С6 |
1шт | С10 | |
1шт | С11 | |
1шт | С12 | |
1шт | С13 | |
1шт | С14 | |
1шт | С15 | |
| 1шт Микросхема | МС1 | |
ВТА41 800V (не обязат) | 1шт Семистор | Т1 |
1шт стабилитрон | ||
1шт стабилитрон | ||
1шт диод | ||
1шт предохранитель | FU1 | |
На 3В | 1шт светодиод |
Изначально автор Bogdan на монтажной плате регулятора оборотов не указал буквенные обозначения всех деталей, но благодаря моему товарищу (огромное ему спасибо) он расставил все обозначения и исправил все неточности которые были у Bogdanа
ВНИМАНИЕ!!! В расположении деталей ОШИБКА! Сопротивление R21 обозначено как R27. Будьте внимательны!
Ссылки для скачивания:
ОЧЕНЬ интересные видео по теме!!!
Агрессивные тесты.
Добавлено Анатолием:
Я думаю Александр не обидится если я в его теме выскажу несколько своих соображений.Собрал уже не одну плату и могу сказать со сто процентной уверенностью. Если у кого то что то не работает, то проверяйте качество изготовления платы, качество и правильность монтажа, исправность элементов и двигателя. Все причины не работы (некорректной работы) кроются только в этом. Печатки и схемы выложенные в нете рабочие. Сам недавно столкнулся с подобным, две разные платы, а проявление неисправности одно и тоже. При включении и добавлении оборотов двигатель раскручивается рывками было ощущение как будто семистор работает на одном полупериоде. Оказалось на одной плате при травлении исчезла дорожка к конденсатору С10 на 47,0х16V, во втором случае этот же конденсатор был высохший.
Попутно убедился, что если уменьшить С11 идущий на 14 ногу микросхемы до 22Н, то двигатель стартует, набирает максимальные обороты и обороты не регулируются. Поэтому с ним тоже нельзя ошибаться 47Н и точка.
Теперь по поводу замеров напряжения.
Я собираю платы с отдельным блоком питания, поэтому промеры даю для этого случая.
Исходные условия, к плате подключен двигатель с таходатчиком, регулятор оборотов в нулевом положении (минимум до конца), блок питания в розетку включён, 220В на плату не подаётся.
1-0,17В
2-0,17В
3-2,63В
4-0
5-0
6-2,4В
7-0,05В
8-0
9-14,65В
10-13,7В
11-12,83В
12-0,55В
13-0
14-11,34В
15-0,03В
16-0,03В
Условия те-же, но подключено 220В и регулятор стоит на небольших оборотах. Двигатель медленно вращается.
1-0,25В
2-0,3В
3-2,62В
4-0,55В
5-0,55В
6-2,4В
7-1,14В
8-0
9-14,2В
10-14,2В
11- не измеряется.
12-0,74В
13-0,69В
14-4,8В при касании щупом двигатель ускоряется.
15-0,73В
16-0,58В
Отличия могут быть но не очень большие. Напряжение на ноге 3 устанавливается регулятором R21.
Кроме этого советовал бы увеличить резистор R9 вместо 1,2 кОм ставить 20кОм. Этим уменьшается напряжение с таходатчика. И R17 вместо 68кОм ставить 27кОм. Ну и диод для защиты микросхемы само собой.
Пару слов по немецкой схеме. При правильной сборке, правильно выполненной печатке и исправных деталях всё работает без вопросов. Рекомендовал бы такую последовательность действий. Собрали плату, проверили сборку, микросхему не ставим. В панельку микросхемы подключаем на ноги 8-9 резистор 1,6кОм 1Вт, подключаем питание 220В, двигатель и таходатчик не подключен (это не принципиально), и меряем напряжение на подключённом резисторе. Должно быть 15-17В. Ставим микросхему, подключаем мотор и таходатчик и наслаждаемся работой. В немецкую схему советую внести следующее изменение. На регуляторе частоты вращения, на центральном отводе, запаять резистор 1,2кОм и второй конец этого резистора на клемму Х2-2, по семе. Боковую ногу регулятора которая раньше шла на центральный отвод, подключаем на корпус. Что это даёт. Раньше, при выведенном в ноль регуляторе, двигатель продолжал вращаться, теперь стоит как ему и положено. А методика настройки простая. Регулятор на ноль, включили, добавили немного оборотов, крутим Р1 пока обороты не станут красивыми на слух и визуально, обороты на максимум, крутим ограничение максимальных оборотов Р3, наслаждаемся своим мастерством.
shenrok.blogspot.com
Регулятор оборотов электродвигателя — TDA1085
В себя включает:
- Плата в сборе — полностью готовая к эксплуатации.
- Резистор регулировки оборотов — в комплекте.
- Установленные клеммы — А (сеть 220 В), М (мотор), Т (таходатчик).
- Питание платы — на прямую от сети 220 вольт, 50 Гц.
- Мощность — до 3000 Вт. (стандартные двигатели от стиральных машин автомат).
- Применение — к коллекторным двигателям (двигателям с щетками).
- Габаритные размеры — длина 96 мм, ширина 96 мм, высота 32 мм.
- Система защиты — по току, предохранителем 5 А.
Дополнительные опции:
- Реверсный переключатель (on-off-on) с проводами и клеммами 16 А, 250 В.
- Измеритель числа оборотов — Тахометр (Отдельное устройство, блок питания ы комплект не входит).
- Реле времени — YYC-2 (Отдельное устройство, блок питания ы комплект не входит).
Для чего нужна эта плата: Данная плата позволяет регулировать обороты коллекторного электродвигателя (с щетками) без потери мощности независимо от нагрузки (в пределах заявленной производителем электродвигателя). С ее помощью вы сможете управлять оборотами электродвигателя от 200 до 20000 об/мин. При этом сохраняя полный момент силы на валу электродвигателя.
Для чего нужен реверсный переключатель: Это тумблер на три положения серии «KCD» с запасом мощности до 4000 Вт., с установленными клеммами и проводами с нанесенной маркировкой к подключению. Устанавливается для изменения стороны вращения вала (ротора) электродвигателя. С его помощью Вы легко сможете изменить направление вращения ротора всего лишь одним переключение тумблера. Внимание! Переключение тумблера во время работы не желательно! На оборотах более 3000 об/мин. ЗАПРЕЩЕНО! Для увеличения срока службы электродвигателя и платы, тумблер реверсного переключателя рекомендуется переключать после полной остановки электродвигателя.
Для чего нужен измеритель числа оборотов: Тахометр просто необходим если Вам нужно замерить обороты станка или вращающегося механизма. Блок питания в комплект не входит.
Для чего нужно реле времени: Таймер времени предназначен для автоматического отключения регулятора. Вы можете выбрать время на таймере и заниматься своими делами, а реле отключит регулятор оборотов через заданное время. Блок питания в комплект не входит.
Дополнительное описание: Монтажная плата изготавливается станочным производством, на заводе в России. Толщина основы текстолита 1,5 мм.Толщина медной фольги 0,35 мм, с нанесенной паяльной маской. Монтаж радиокомпонентов, осуществляется заводским конвейером. Установленные детали в выводном корпусе. Активные радиокомпоненты, закупаются от фирм оригинальных производителей: On semiconductor, ST microelectronics, с целью увеличения надежности и длительного срока эксплуатации.
Внимание! Данная плата применима, только для коллекторных двигателей (двигателей с щетками), с обязательным наличием таходатчика. Данная плата изготавливалась для двигателей от стиральных машин автомат, мощностью до 3000 Вт.
- Каждая плата пред отправкой заказчику проходит полную проверку под нагрузкой, на предмет отсутствия дефектов и брака!
- Предоставляется гарантия и послепродажная консультация!
Различная комплектация
КОМПЛЕКТАЦИЯ «КОНСТРУКТОл себя включает:
| КОМПЛЕКТАЦИЯ «ПЛАТА МОНТАЖНАЯ»В себя включает:
|
elektroplata.ru
Настройка регулятора оборотов коллекторного двигателя с поддержанием мощности.
После зборки регулятора оборотов с обратной связью, на TDA1085 необходимо его настроить для работы с конкретным двигателем и конкретным таходатчиком. Для настройки подключаем двигатель и таходатчик к соответствующим разъёмам на плате. Двигатель должен быть надёжно зафиксирован. Регулировочное сопротивление R1, ставим на минимум и подаём на плату питание 220 Вольт. При этом светодиод HL1 должен засветиться. Если на Х4 вы поставили тумблер, то включаем его. Начинаем плавно добавлять R1. Двигатель должен начать вращаться. Вращая R1 дальше, обороты на валу двигателя должны увеличиваться до максимальных. При правильно собранной и полностью рабочей плате могут возникнуть такие неполадки: Двигатель, выходя на определённые обороты начинает «дёргаться» и дальше оборотов не набирает. Такое происходит, если выходное напряжение таходатчика превышает 6 Вольт. При таком вольтаже микросхема блокирует симистор, и двигатель сбрасывает обороты. Напряжение уменьшается, и микросхема снова открывает симистор. Отсюда и происходят рывки навалу двигателя. При обсуждении данной проблемы на страницах форума были предложены несколько вариантов. Добавить сопротивление R9 и поставить светодиод в качестве стабилитрона между 12 ножкой микросхемы и массой. Катодом на землю.
Ставим светодиод как указанно на схеме, и подстроечное сопротивление последовательно R9. Выкручиваем R1 на максимум, и добиваемся максимальных оборотов на валу двигателя, регулируя добавленное сопротивление. Отключаем питание и впаиваем вместо R9 сопротивление с номиналом полученным подстроечным +R9.
Далее снова пробуем, как двигатель реагирует на регулировку. Теперь может оказаться, что в регулировке задействовано не всё сопротивление R1, а лишь небольшая часть. Что бы исправить этот дефект, нужно подобрать номинал R2, при этом мы можем подобрать его так, что на максимально выкрученном регуляторе будут не максимальные обороты, а меньше. Те, которые нам необходимы. Допустим двигатель от стиральной машины развивает максимально 12000 об\мин, а мы настроим регулятор так, что максимальные будут 8000 об\мин.
После этого двигатель, таходатчик и плата регулятора будут работать согласованно. Далее можно настраивать «плавный пуск» двигателя вращая подстроечное сопротивление R3 расположенное на плате. А так же быстроту реагирования на нагрузку сопротивлением R21 .
Журнал «Ремонт и сервис» №6(129) 2009г.
двигатель дёргается под нагрузкой
1. срабатывание по ограничению тока Pin.3 (смотреть осцилографом), защита срабатывает при отрицательных амплитудах импульсов (в амплитуде)
— или померять тестером напряжение на Pin.3 (можно на неработающем двигателе) и увеличить напряжение на Pin.3 подстройкой R4 (по даташиту)
2. заинтегрирован вход тригера импульсов управления симистора Pin.16 (фильтр управляющего напряжения)
— уменьшить R16 (по даташиту) до 12-22 ком ( по идее чем меньше резистор, тем дольше время задержки изменения управляющего напряжения на Pin.16), конденсатор при этом 47 мкф,
примечание. у кон-ров емкость может быть меньше, чем указано на маркировке, кон-р электролитический, электролит высыхает, емкость падает
Стабильность малых оборотов привязана к
— частоте сети 50 Гц (лечится уже не фазным управлением СИФУ, как на TDA1085, а ШИМ — 1-15 кГц), и
— количеству импульсов таходатчика за 1 оборот ( чем больше, тем лучше)
симистор с буквой W — c лучшими демпфируюшими свойствами snubberless — лучше для управления двигателем
shenrok.blogspot.com
Регулятор оборотов с обратной связью для коллекторных двигателей переменного тока
Большинство мировых производителей профессиональных угловых шлифовальных машинок (болгарок) таких как Bosch, Metabo, Makita, DeWalt и других используют два типа регуляторов оборотов с обратной связью.
С помощью таходатчика
На конце якоря мотора установлен кольцевой магнит с прорезью или срезом, а на плате регулятора установлена катушка индуктивности или датчик Холла. Такой регулятор обеспечивает максимально точную стабилизацию оборотов двигателя при изменении нагрузки.
На основе измерения падения напряжения на электродвигателе
В этом случае измеряется падение напряжения на двигателе, и схема управления изменяет длительность открытия силового ключа. Такой регулятор, если он правильно настроен, обеспечивает также хорошую стабилизацию оборотов двигателя при изменении нагрузки.
Все промышленные регуляторы, собранные на микроконтроллерах, полностью залитые эпоксидной смолой и в итоге они не пригодны для ремонта, а цена за новый регулятор достаточно большая, и составляет примерно 20-30% от стоимости самого электроинструмента.
В поиске специализированных микросхем для решения данной задачи мне приглянулись регуляторы Phase Control фирмы Atmel. Например, простой вариант регулятора на микросхеме U2008B. Рассмотрим схему регулятора на ИМС U2008B приведенную на рис.1. В данном регуляторе можно использовать обратную связь по току или режим плавного пуска, однако в нём нет защиты от перегрузки. Если использовать плавный пуск тогда нужны только элементы С1, R4 и перемычку Х1 не ставим, а если нужна обратную связь — тогда все наоборот.
Рис. 1
Так как ИMC U2008B не может одновременно работать в режиме плавного пуска и обратной связи, она не подходит для нашей задачи. На рис.2 показана схема регулятора на микросхеме U2010B, у которой есть обратная связь по току, защита от перегрузки и плавный старт одновременно. Светодиод D2 индицирует перегрузку электродвигателя. Переключатель SA1 «Mode» обеспечивает возможность выбора действий при перегрузке на двигателе в трех режимах: Положение А — индикация перегрузки и последующий сброс на минимальные обороты. Для восстановления рабочих оборотов, необходимо выключить инструмент.
Рис. 2
Положение В — индикация перегрузки, последующий сброс на минимальные обороты, после снятие нагрузки с инструмента, восстанавливаются установленные обороты, т.е. происходит авто старт.
Положение С — только индикация перегрузки, без остановки двигателя и защиты.
Подбором ёмкости конденсатора СЗ от 1 до 10 мкФ можно изменять длительность и плавность пуска двигателя.
Настройка регулятора.
В техническом описании к ИМС U2010B в схеме подключения обозначено только падение напряжение на R6 в 250 мВ и не указано, каким именно должен быть этот резистор.
Рассчитать сопротивление R6 можно исходя из мощности двигателя по формуле:
R6 = UR6/(Рдвиг/Uпит),
где:
UR6 — напряжение на R6 (250 мВ),
Рдвиг — мощность двигателя,
UПИТ — напряжение питания сети.
Например, для двигателя мощностью 750 Вт рассчитываем: R6= 0,25/(750/220) = 0,07 Ом.
Номиналы резисторов R6 и R11, в зависимости от мощности электродвигателя, приведены в таблице.
| R11 Мощность, Вт | R6*, Ом | Нихром, D 1 мм | Нихром, D 0,8 мм | R11*, кОм |
| 250 | 0,22 | 30 | 19 | 180-270 |
| 300 | 0,18 | 27 | 17 | 180-220 |
| 550 | 0,1 | 25 | 16 | 180 |
| 700 | 0,08 | 20 | 14 | 160 |
| 850 | 0,07 | 17 | 11 | 150 |
| 1000 | 0,055 | 15 | 10 | 100-120 |
| 1200 | 0,047 | 13 | 9 | 90-110 |
| 1500 | 0,04 | 12 | 8 | 80-100 |
| 1800 | 0,03 | 10 | 7 | 70-100 |
| 2000 | 0,028 | 8 | 6 | 65-90 |
| 2200 | 0,025 | 7 | 5 | 65-90 |
Главное правильно подбирать резистор R6 под мощность двигателя. Выше представленная формула правильная, но на практике может потребоваться некоторая коррекция по поведению двигателя под нагрузкой. Если резистор великоват, то двигатель довольно резко стартует (т.е. происходит большая компенсация нагрузки, чем надо), а потом отключается, а если резистор будет мал, то не будет обеспечиваться компенсация нагрузки.
В Datasheet к ИМС U2010B ёмкость конденсатора С2 указана 0,01 мкФ, но она рассчитана на 60-герцовую сеть, и при использования ИМС в сети 50 Гц за период выдавалось несколько импульсов управления. В итоге, обороты электродвигателя практически не регулировались и двигатель работал на полную мощность. Для сети с частотой 50 Гц нужно ёмкость конденсатора С2 увеличить до 0,015 мкФ.
Первый пуск
Переменный резистор Р1 (регулятор оборотов) нужно установить на минимальные обороты двигателя, по схеме движок потенциометра должен быть повернут в сторону резистора R13. Затем подстроенный резистор R10 (компенсация нагрузки) установить в среднее положение, а на место R11 (перегрузка) временно подпаять постоянный резистор сопротивлением 62 кОм. Потом включить регулятор в сеть 220 В / 50 Гц и подстроенным резистором R8 выставить самые минимальные обороты двигателя.
Нужно сделать так, чтобы при включении двигатель начинал вращаться на минимальных оборотах. Если настроить устройство так, чтобы совсем не было напряжения на электродвигателе, то тогда становится слишком нелинейная зависимость управления резистором Р1 — при его повороте сначала двигатель не крутится, а потом резко стартует без плавного пуска.
Далее нужно подключить вольтметр с диапазоном измерения 300 В к выводам двигателя, включить двигатель и на средних оборотах, зажимая вал или привод двигателя через тряпку рукой, выставить такое положение резистора R10, чтобы обороты электродвигателя не менялись при изменении нагрузки на его валу. Одновременно с этим нужно смотреть на вольтметр, подключенный к двигателю. При увеличении нагрузки на валу электродвигателя регулятор прибавляет напряжение, и двигатель крутится с одинаковыми оборотами, независимо от нагрузки.
И вот в последнюю очередь настраивается резистор R11 (перегрузка). Постоянный резистор номиналом 62 кОм выпаиваем и вместо него ставим подстроенный или переменный резистор номиналом 220 кОм. На оборотах двигателя чуть больше минимальных, сильно зажимая вал или привод двигателя, стараемся почти заклинить вал двигателя, и по степенно изменяем величину резистора R11, пока не начнет срабатывать защита, и не станет светиться VD2. Затем измерьте сопротивление переменного резистора тестером и запаяйте в устройство соответствующий резистор. В таблице указано приблизительные значения сопротивления R11,
Детали регулятора
Купить микросхемы U2008B, U2010B можно через сайт AliExpress (www.ru.aliexpress.com) в Китае с бесплатной доставкой на Украину, а далее посылка бесплатно отправляется через «Укрпочту» в любое почтовое отделение на территории Украины. Доставка на Украину производится на протяжении 25-40 дней. Например, цена 1 шт. микросхемы U2010B зависит от корпуса исполнения, примерно 0,9 USD в корпусе S016 и 1,2 USD в корпусе DIP16, а симистора ВТА24-800 — 0,4 USD.
Печатная плата устройства изготовлена из одностороннего фольгированного стеклотекстолита толщиной 1 мм.
Симистор VS1 лучше использовать с изолированной площадкой под радиатор серии ВТА, например BTA12-800, BTA16-800, BTA24-800, или применить другие. При мощности двигателя до 400 Вт, VS1 можно не устанавливать на радиатор. Все SMD детали типоразмера 1206, их можно запаять обычным паяльником с тонким жалом.
Подстроенные резисторы — типа СП3-19а или другой малогабаритный. Переменный резистор Р1 любой на 47-50 кОм, можно малогабаритные СП4-1, СП3-9. Резистор R1 мощностью не менее 2 Вт, например, типа MЛT-2 или др. Резистор R6 изготовлен из нихромовой проволоки диаметром 0,7 — 1 мм. Автор использовал нихромовый провод из старого блока сопротивлений для зажигания автомобилей ГАЗ с маркировкой 1402.3729. Все электролитические конденсаторы на напряжение не менее 50 В. Диод D1 — типа 1N4007 или КД208, также можно использовать диод в SMD исполнении. Светодиод D2 любой малогабаритний диаметром 3-5 мм красного света. Переключатель SA1 любой малогабаритный 3-х позиционный. Если нужен только один режим перегрузки, тогда вместо него можно установить перемычку.
Литература:
- Бирюков С. Автомат плавного пуска коллекторных электродвигателей. // Радио. — 1997. — №7. — С.40-42.
Печатная плата для схемы показанной на рисунке 2:
[hidepost]Скачать[/hidepost]
Автор: Валентин Шипляк, г. Ужгород
Возможно, вам это будет интересно:
meandr.org