Регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя. — Электропривод
Привет всем.В этой теме я расскажу про регулятор оборотов с обратной связью по скорости , токовой отсечкой и плавным запуском для универсального коллекторного двигателя или двигателя постоянного тока.Получилось подобие сервопривода.Схема подойдет не только для доработки мини-дрели , но и как блок управления коллекторным двигателем для небольших китайских станков, вместо штатной платы.
У меня была тема в законченных проэктах про сверлильное приспособление для часового токарного станка Т-28 на основе китайской мини-дрели Hilda.
Все отлично работало,насверлил кучу отверстий сверлами 1.2 мм и меньше.Но вот срочно понадобилось сверлить сверлами диаметром 3-4 мм.И здесь штатный регулятор оборотов перестал справляться со своей задачей.Я решил собрать нормальный регулятор.
Пару лет назад я за несколько дней придумал и собрал для постоянного клиента блок управления крупным универсальным коллекторным двигателем, который крутил шнек на немецком экструдере на производстве пластикового профиля.
Я решил для сверлильного приспособления просто выкинуть все лишнее из блока управления движком экструдера-схема вышла удачная, зачем второй раз велосипед изобретать.
Сразу предупреждаю, что блок управления был собран в основном из радиодеталей конца СССР, которых у меня схабарено с забросок в виде разных ЗИП ов просто огромное колличество.И оно все растет!Покупать и изобретать что то крутое и современное было некогда-у клиента горел заказ, о чем он был предупрежден само собой.
Этот регулятор оборотов то же на устаревшей элементной базе, но никто не мешает повторить этот принцип на чем угодно , если кто то ненавидит старую элементную базу.Мне иногда наоборот нравится немного онанизма со старыми радиодеталями.
Вот схема:
Немного про то, как оно работает:
То, что обведено пунктиром-находится непосредственно в корпусе мини-дрели. Это оптический датчик оборотов из инфракрасных фототранзистора и светодиода.Вместо диска с отверстиями или темными-светлыми участками используются лопасти вентилятора.Со специальным диском с большим колличеством отверстий было бы лучше -но в данном случае его некуда поставить.VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
Это оптический датчик оборотов из инфракрасных фототранзистора и светодиода.Вместо диска с отверстиями или темными-светлыми участками используются лопасти вентилятора.Со специальным диском с большим колличеством отверстий было бы лучше -но в данном случае его некуда поставить.VT13-усилитель сигнала фоторанзистора.С самим регулятором он связан экранированным кабелем.
На элементах TV1,VDS1, DA1 и то что рядом с ними собран стабилизированный источник питания 12 вольт.Выключатель SA2 включает -выключает двигатель сверлилки.Вентилятор работает все время.
На транзисторах VT1-VT2 собран датчик перехода напряжения через ноль.На конденсаторе С6 имеем подобие «пилы».
Транзистор VT3-буферный каскад для «пилы».
Резистором R5 задается минимальная скорость вращения.
Транзистор VT4-каскад сравнения.На базу подается «пила» на эмитер-напряжение пропорциональное скорости вращения.
VT5- ключ, разрешающий работу блокинг-генератора на транзисторе VT6.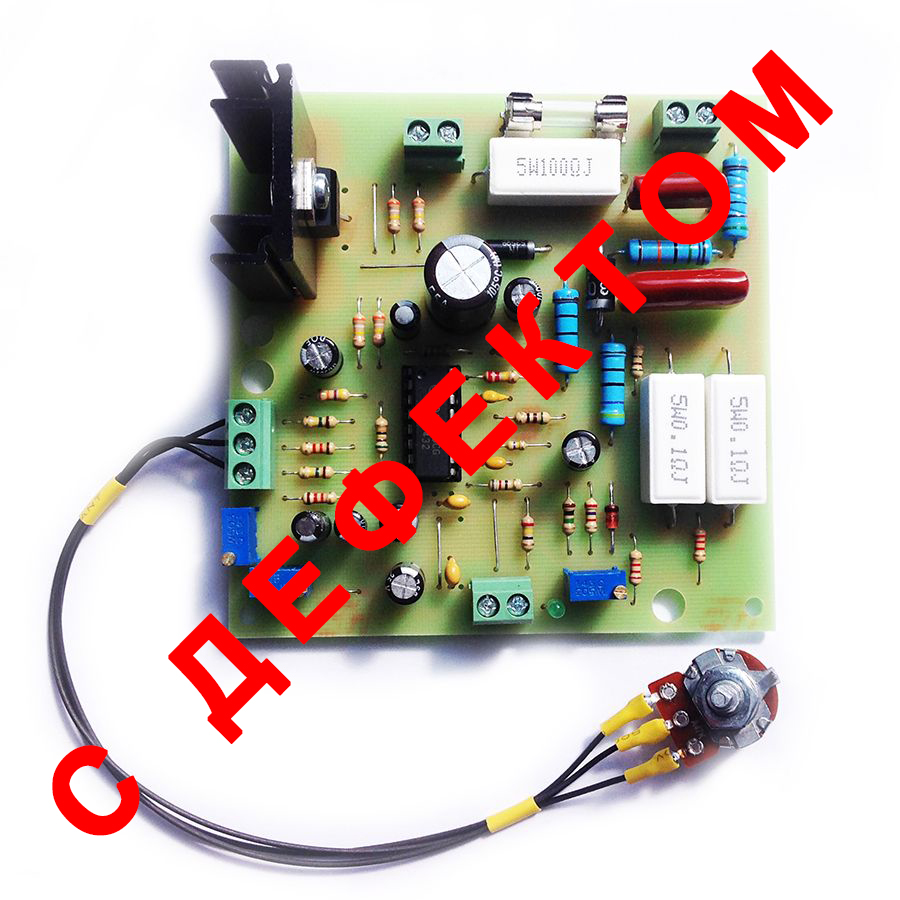 Он вырабатывает пачки импульсов управления , которые через импульсный трансформатор TV2 поступают на управляющий электрод тиристора.
Он вырабатывает пачки импульсов управления , которые через импульсный трансформатор TV2 поступают на управляющий электрод тиристора.
На диодах VD5-VD6 и элементах рядом с ними собран преобразователь частоты импульсов с датчика скорости в напряжение пропорциональное скорости.Обращаю внимание на конденсатор С13.Его емкость тем меньше, чем больше отверстий в диске-датчике скорости.А чем больше отверстий -тем более линейную регулировку имеем.
VT7-буферный каскад , на его выходе резистор R16-регулятор скорости.
Транзистор VT8 обеспечивает плавный разгон двигателя.Время разгона можно корректировать емкостью конденсатора С15.Диоды VD7-VD8 для его быстрой разрядки при отключении питания и повторном запуске.
Трансформатор тока TA1- датчик тока.Напряжение с него подается на R25 , которым регулируется чувствительность защиты по току.Потом напряжение выпрямляется VD10 и поступает на тригер на транзисторах VT10-VT11.При заклинивании или перегрузке тригер переключается, загорается светодиод HL3 -«авария» и ключевой транзистор VT9 , блокирует импульсы управления на тиристор.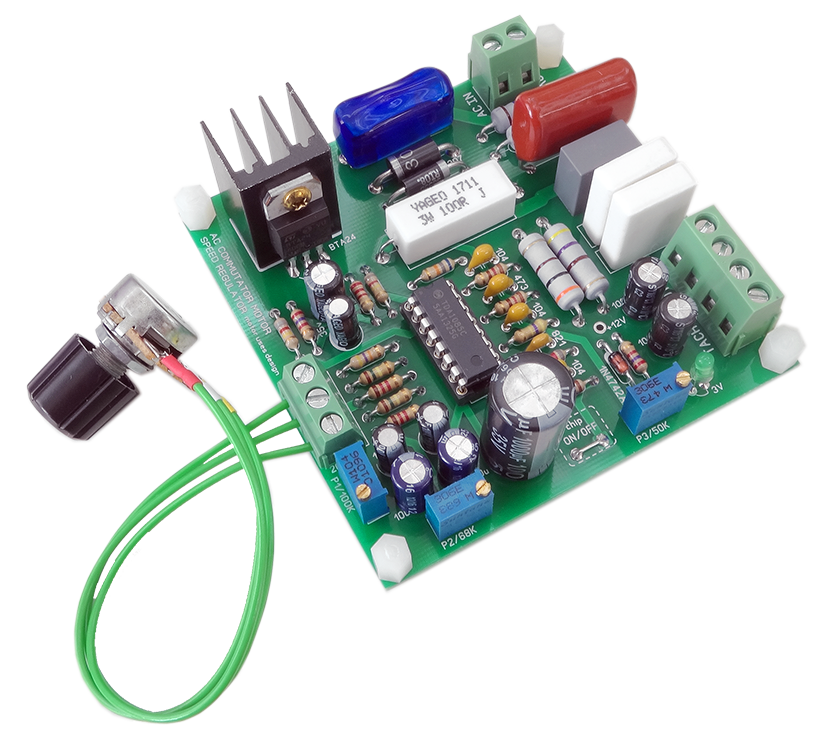 Перезапуск -выключением питания SA2.Конденсатор С17 определяет небольшую задержку на срабатывание токовой отсечки.
Перезапуск -выключением питания SA2.Конденсатор С17 определяет небольшую задержку на срабатывание токовой отсечки.
Трансформатор TV1-любой малогабаритный на 12 вольт.Трансформатор TA1-трансформатор тока самодельный.Можно использовать что угодно с готовой вторичной обмоткой , добавив первичную.
Импульсный трансформатор самодельный или любой промышленный из плат с тиристорами.
Дроссель L1 для подавления помех, самодельный или подходящий по току от импульсных блоков питания.
Силовая часть схемы не содержит ничего интересного.Элементы взяты с запасом по току.Варистор VDR1 и C11-R11 гасят выбросы напряжения в переходных режимах работы электродвигателя.
Колличество транзисторов и вспомоготельных элементов завышено.Но зато схема начинает работать сразу, после сборки.Не надо подбирать режимы, чем грешило большинство схем из «Радио».
Транзисторы-любые маломощные , не принципиально.На месте VT6-средней мощности.
А теперь немного фоток, как я запихал оптопару в мини дрель.
Вот мини дрель в разборе
А вот оптопара от какой то оргтехники
Пилим ее пополам и немного обточим напильником
В корпусе мини-дрели вырезаем два окна для крепления оптопары
Части оптопары сажаем на кусочек макетной платы
Вставляем ротор на место и потом оптопару , теперь она смотрит через вентилятор
Закрываем крышечкой
Делаем крепление для вентилятора
Собираем на кусочке макетной платы усилитель оптопары
И собираем все-понятно из фоток
А вот разводить плату мне было лень!Если кто то это сделает и выложит-да еще возможно на СМД шках-тому респект!Я как в радиолюбительской юности быстро нарезал площадки на куске стеклотекстолита и собран аккуратно навесным монтажем
Корпус по быстрому согнул из оцинковки-а то уже сверлить пора
Корпус без вентиляции-там почти ничего не греется, а попадание стружки не входит в наши планы.
И вот оно в готовом виде.
А вот так оно теперь выглядит на станке
Результат меня полностью устроил.Отлично сверлит , скорость не проседает, при изменении нагрузки.Учитывая что это мини-дрель и часовой станок -сверло 5мм по стали в легкую.Если сверло все же заклинило-срабатывает токовая отсечка.За счет компьютерного вентилятора, который работает и в паузах между сверлениями, двигатель не перегревается.А уж плавный запуск-это просто приятно.Скорость регулируется визуально от оборотов 300- для мелких сверл меньше не надо.Можно бы сделать почти от нуля, но тогда в качестве датчика уже не пойдут лопасти вентилятора-будет нужен диск с отверстиями или прорезями с несколькими десятками отверстий.Подойдет и готовый узел от например принтера.
Если у этого регулятора усилить силовую часть схемы-он вполне справится и с гораздо более крупными электромоторами типа стиралочного и крупнее.Возможен вариант и без диодного моста в силовой части -с двумя встречно включенными тиристорами. Только добавить еще одну обмотку к импульсному трансформатору.
При небольшой доработке схема будет работать вместо оптического датчика с тахогенератором.
Заранее приношу извинения, если где то в описании перепутал обозначения деталей.Но на самой схеме все точно-проверял многократно.
Регулятор мощности с обратной связью
И.СЕМЕНОВ,141980, Московская обл., г.Дубна, ул.Мира, 9/6 — 4, тел.(221)4-54-00.
Часто необходимо понизить частоту вращения электродрели или иного электроинструмента с коллекторным двигателем переменного тока. В большинстве случаев регуляторы мощности хорошо управляют активной нагрузкой, тогда как регулирование реактивной нагрузки имеет свои особенности. Обычно используют или число-импульсный, или фазо-импульсный принцип регулирования. Схема регулятор мощности показана на рисунке 1.
Рисунок — Регулятор мощности
Достаточно полно эти вопросы отражены в публикациях разных лет, например в [1. ..3].
..3].
Предлагаемая схема обеспечивает регулирование с обратной связью по току коллекторного двигателя переменного тока, благодаря чему при увеличении нагрузки соответственно увеличивается крутящий момент на валу. Схема была реализована для привода швейной машины в производственных условиях. Для регулирования оборотов швейных машин применяют угольные (таблеточные) реостаты, которые весьма недолговечны. Регулятор, приведенный на рисунке, состоит из силового ключа на тринисторе VS1, выпрямительных вентилей VD1, VD2 и переменного резистора R2 в цепи управления. На выходе предусмотрен выпрямительный мост. Все элементы регулятора смонтированы на плате навесным монтажом и закрыты ударопрочным корпусом. Перегрева тринистора не наблюдалось, поэтому он установлен на монтажной стойке без теплоотвода.
Некоторую трудность представляет механический узел, передающий усилие от педали на ось потенциометра, но это преодолимо, если применить зубчатый сектор и шестерню.
Характерная черта работы регулятора — его обратная связь по нагрузке. При увеличении нагрузки увеличивается крутящий момент на валу двигателя. Благодаря этому машина легко проходит утолщения в виде швов, работает более плавно. Искрения на коллекторе не наблюдалось.
При использовании регулятора для более мощных двигателей необходимо подобрать по току выпрямительный мост и тринистор установить на радиатор.
Литература
1. Бастанов В.Г. 300 практических советов.— 1989.
2. Радио.— 1990.— N1.
3. Радиолюбитель. — 1996. —N12.
РАДИОЛЮБИТЕЛЬ 12/97, с.21.
Регулятор оборотов коллекторного двигателя с обратной связью
Плата регулятор оборотов без потери мощности для двигателей от стиральных машин, controller TDA1085
Полностью собранная настроенная и проверенная плата регулировки оборотов двигателей от стиральных машин без потери мощности для двигателей мощностью до 1000 Вт. Плата собрана на оригинальном контроллере TDA1085C? а не его дешевых аналогах/ Установлен мощный симистор с током до 40 А что обеспечивает большой запас устройства по мощности. Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и других. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах от 0 до15000 оборотов вминуту. Скорость вращения двигателя отслеживается тахогенератором.
Плата собрана на оригинальном контроллере TDA1085C? а не его дешевых аналогах/ Установлен мощный симистор с током до 40 А что обеспечивает большой запас устройства по мощности. Данная плата служит для управления коллекторным двигателем который оснащен таходатчиком или датчиком холла. Такие двигатели установлены на современные стиральные машины Indesit, Samsung, LG и других. Регулятор позволяет изменять скорость вращения вала двигателя с поддержанием мощности в пределах от 0 до15000 оборотов вминуту. Скорость вращения двигателя отслеживается тахогенератором.
Видео обзор платы регулятора оборотов с обратной связью:
Плата обеспечивает поддержку оборотов без потери мощности даже на минимальных оборотах двигателя!
Так как двигатели от стиральных машин обладают высокой надежностью, и достаточно доступны по цене,при этом у многих просто лежат дома без дела от сломанной стиральной машины, то их широко применяют для изготовления различных станков и приспособлений: точильных станков, токарных и даже фрезерных станков, сверлильных станков, медогонок, гончарных кругов, и другого оборудования.
Плата не только регулирует обороты, но и надежно поддерживает их при появлении нагрузки на валу!
На плате установлены подстроечные резисторы для настройки:
— Максимальных оборотов
— Скорости набора оборотов при вращении потенциометра
— Скорости реакции платы на появление нагрузки на валу
— Подстройки и синхронизации работы таходатчика
Комплектация платы регулятора оборотов:
1. Спаянная, настроенная и проверенная плата регулятора оборотов.
2. Переменный резистор с пластиковой ручкой.
3. Клавишный переключатель включения контроллера.
4. Клавишный переключатель направления вращения (Для реверса).
5. Светодиод индикации.
6. Запасной предохранитель.
7. Краткое описание.
Есть в наличии комплект платы регулятора оборотов со всеми необходимыми проводами. Помимо самой платы в комплект входит:
- Сетевой шнур для подключения питания длинной 1 метр.
- Провод для подключения таходатчика длинной 1 метр
- Провода для подключения двигателя с распаянным тумблером реверса.
От тумблера до двигателя 1 метр
- Светодиод с проводом 20 см.
- Тумблер включения с проводом 20 см.
- Резистор регулятора оборотов с с проводами 20 см.
- Запасной предохранитель и краткое описание прилагаются
Стоимость платы регулятора оборотов с комплектом проводов составит 800 грн. Если вам необходим такой комплект, то обязательно сообщите об этом по телефону и напишите в комментарии к заказу.
Техника безопасности при работе с регулятором
Для того чтобы избежать поражения электрическим током при обращении с регулятором оборотов, соблюдайте основные меры безопасности:
— Никогда не прикасайтесь к подключенной к сети 220v плате руками.
— С осторожностью проводите настройку платы, при необходимости делайте это при помощи отвертки с прорезиненной ручкой.
— Будьте аккуратны с переменным резистором, на нем тоже присутствует напряжение в местах подключения к клемм и в местах соединения с проводами.
— Настоятельно рекомендую сначала подключить двигатель и сетевой провод к плате, а затем уже подключать к сети 220V. — Желательно плату поместить в корпус, предусмотрев отверстия
для вентиляции. Если корпус металлический обязательно его заземляем, вместе с двигателем.
— Не допускайте перегрева симистора, отслеживайте температуру путем на радиаторе. Температура не должна превышать 80°С. Не прикасайтесь к радиатору до отключения регулятора от сети.
— Помните, что в случае выхода симистора из строя, двигатель может выйди на максимальные обороты, поэтому установите кнопку аварийного отключения питания.
Ознакомится со схемой подключения данной платы к двигателю, а так же особенности подключения датчика Холла вы можете в статье перейдя по ссылке
Схема коммутации реверса двигателя:
Видео обзор подключения реверса к плате регулятора оборотов
РЕГУЛЯТОР ОБОРОТОВ ДЛЯ ЭЛЕКТРОИНСТРУМЕНТА
электроника для дома
При работе с электроинструментом (электродрелью шлифовальным устройством и пр ) желательно иметь возможность плавно изменять его обороты. Но простое уменьшение питающего напряжения приводит к снижению развиваемой инструментом мощности В предлагаемой схеме (рис.1) используется регулирование с обратной связью по току двигателя, в результате чего при увеличении нагрузки соответственно увеличивается и крутящий момент
на валу. Резистивно-емкостная цепочка R1-R2-C1 формирует регулируемое опорное напряжение, которое с движка R2 поступает в цепь управляющего электрода тиристора VS1 и компенсирует остаточную противо-ЭДС двигателя М1 Если скорость вращения двигателя падает из-за возрастания нагрузки, уменьшается и его противо-ЭДС./F036M_(6-90V-15A)-02.JPG) Благодаря этому в очередном полупериоде сетевого напряжения тиристор за счет опорного напряжения открывается раньше. Соответствующее повышение напряжения на двигателе приводит к увеличению мощности на валу двигателя. При увеличении оборотов в случае снижения нагрузки описанный процесс происходит наоборот
Благодаря этому в очередном полупериоде сетевого напряжения тиристор за счет опорного напряжения открывается раньше. Соответствующее повышение напряжения на двигателе приводит к увеличению мощности на валу двигателя. При увеличении оборотов в случае снижения нагрузки описанный процесс происходит наоборот
Настройка устройства сводится практически к подбору сопротивления R1, чтобы при минимальных оборотах двигатель вращался ровно, без рывков, и, в то же время, обеспечивался полный диапазон изменения оборотов. Возможно, к нижнему по схеме выводу R2 придется подключить небольшой резистор, ограничивающий минимальные обороты двигателя. Если тиристор VS1 будет сильно греться, его нужно установить на теплоотвод.
Упрощенный вариант регулятора показан на рис.2. Если в патрон электродрели зажать насадку-отвертку, с помощью этой приставки можно закручивать винты и шурупы (саморезы).
Литература
1 И.Семенов. Регулятор мощности с обратной связью. — Радиолюбитель, 1997, N12, С. 21.
2 Р.Граф. Электронные схемы 1300 примеров — М Мир, 1989, С 395.
3. В Щербатюк Заворачиваем шурупы электродрелью. — Радиолюбитель, 1999 N9, С 23
Cмотрите также: Регулятор мощности на MOSFETах
Стабилизатор частоты вращения коллекторных двигателей
Cтабилизатор частоты вращения — регулятор с положительной обратной связью по току. Информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор.
Принципиальная схема стабилизатора частоты вращения Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1. Ток, потребляемый
двигателем,
создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (график
1). Основная
гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход
усилителя,
собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме
ограничения. На
его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения
двигателя (график
2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (график 3). Отрицательный выброс ограничивается
диодом VD1.
Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с
помощью делителя
R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (график 4).
Ток, потребляемый
двигателем,
создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (график
1). Основная
гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход
усилителя,
собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме
ограничения. На
его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения
двигателя (график
2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (график 3). Отрицательный выброс ограничивается
диодом VD1.
Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с
помощью делителя
R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (график 4).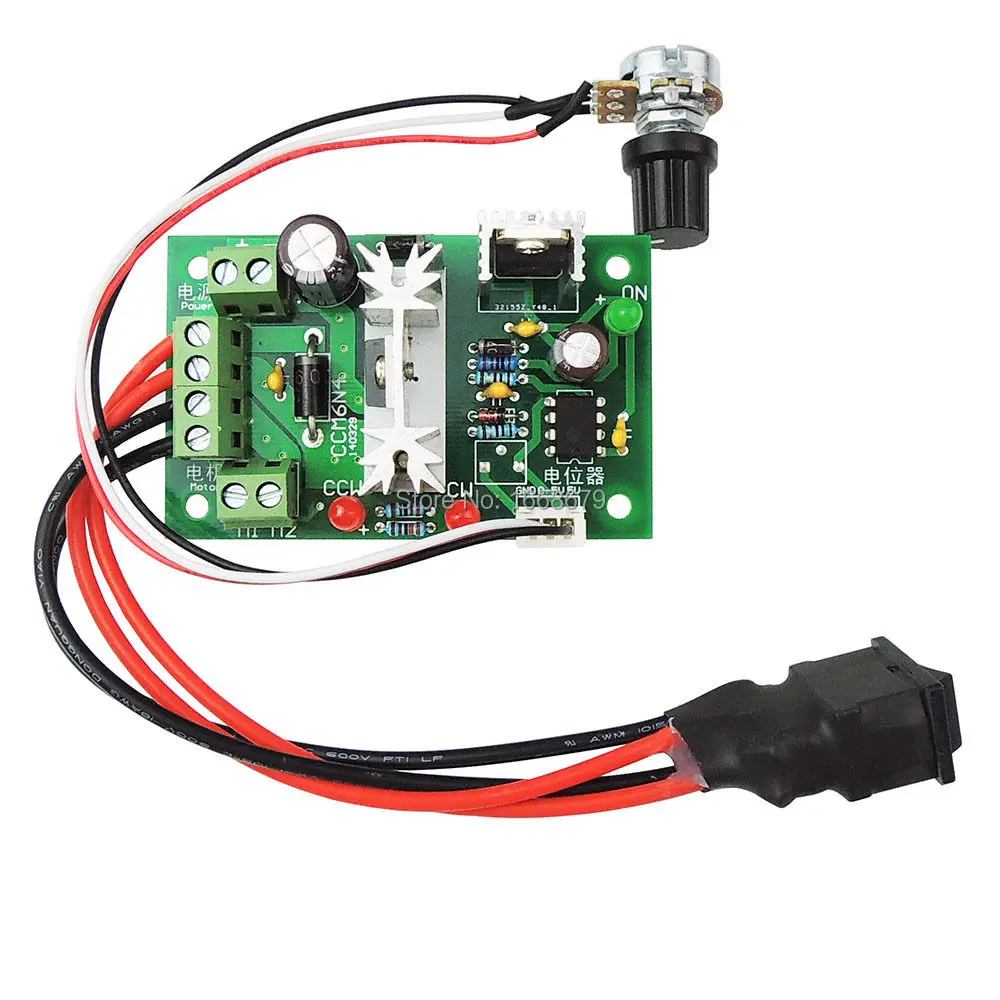 Постоянная
составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте
вращения
двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное
напряжение,
пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ
U1C. Для
получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают
регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным
эмиттерным
повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и
достаточно
было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с
двухтактным
эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя
или при
резких колебаниях нагрузки на валу).
Постоянная
составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте
вращения
двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное
напряжение,
пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ
U1C. Для
получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают
регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным
эмиттерным
повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и
достаточно
было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с
двухтактным
эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя
или при
резких колебаниях нагрузки на валу).
Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной
ситуации дело
усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть
очень трудно.
Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить
коэффициент
усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора
как в
установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа
контролировать
напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без
колебательного
процесса. Если при работающем я такждвигателе изменить нагрузку на валу, напряжение питание должно принять
новое
значение без колебательного процесса.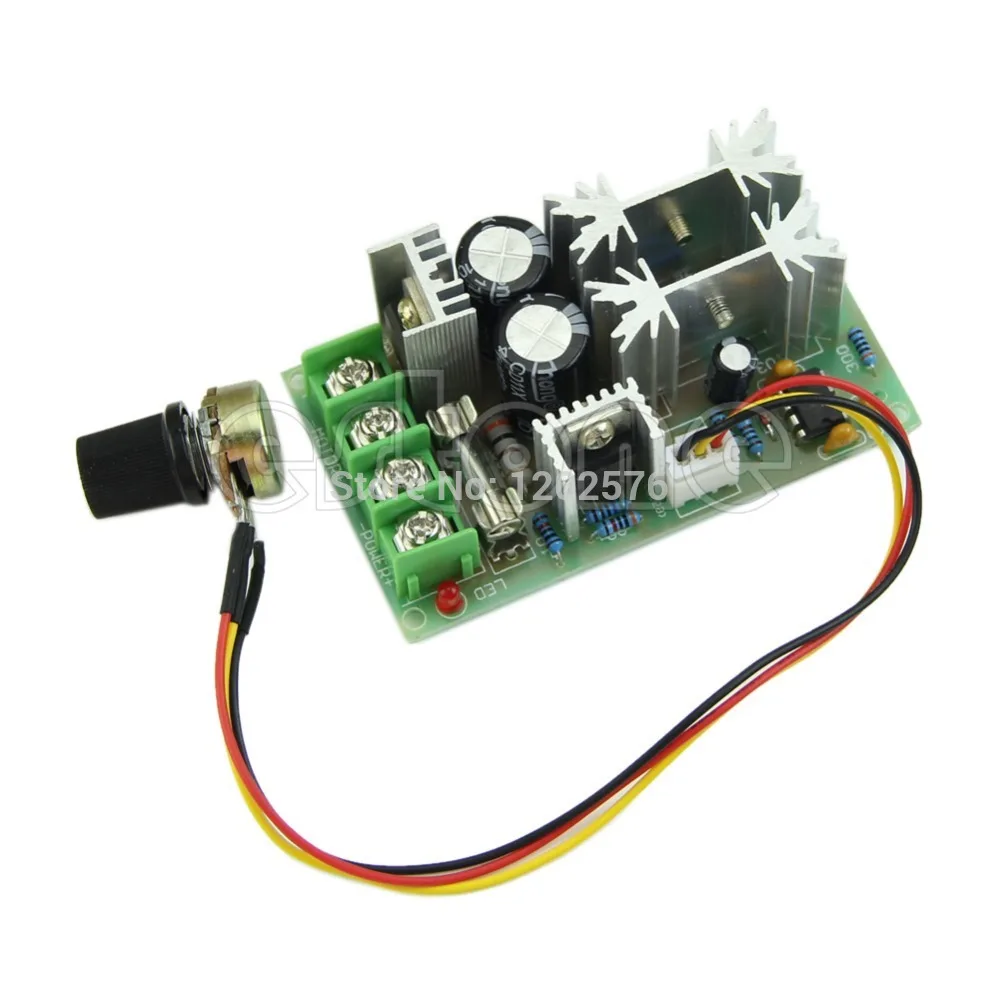
Полную версию этой статьи можно найти в журнале «Схемотехника», №4 за 2001 год. Автор — Л.Ридико
Регуляторы с обратной связью по положению
Автоматическое регулирование процесса предусматривает наличие обратной связи регулятор непрерывно следит за выходными параметрами регулируемого объекта и сравнивает их с заданным значением переменной. Отклонение от задания используется прибором для вычисления коррекции положения регулирующего клапана или другого исполнительного механизма, возвращающего значение выходной характеристики на заданный уровень. [c.97]В технике обратную связь применяют для управления процессом, при этом сигнал с выхода системы используется для воздействия на вход. Примером может служить ранее рассмотренная замкнутая система с отрицательной обратной связью (см. рис. 1-2). Регулятор непрерывно следит за выходным параметром регулируемого процесса и сравнивает его с заданным значением.
 По разнице, обнару-жива емой при этом сравнении, прибор корректирует положение клапана (исполнительного механизма), возвращающего значение выходной характеристики на заданный уровень. [c.29]
По разнице, обнару-жива емой при этом сравнении, прибор корректирует положение клапана (исполнительного механизма), возвращающего значение выходной характеристики на заданный уровень. [c.29] На рис. 1.5, а приведена схема гидромеханического регулятора непрямого действия для поддержания угловой скорости какого-либо двигателя, например, гидравлической турбины. Чувствительным элементом в этом регуляторе служит центробежный маятник 1, работающий так же, как и центробежный регулятор Д. Уатта. Муфта центробежного маятника соединена рычагами АВС и ОЕО с золотником 10 и штоком поршня 7 гидроцилиндра 8. Рычагом ВЕС осуществляется отрицательная обратная связь от поршня гидроцилиндра к золотнику. Вал центробежного маятника приводится во вращение от вала двигателя О. При изменении нагрузки Я, создаваемой приводимой от двигателя машиной, изменяется частота вращения вала двигателя и соединенного с ним вала центробежного маятника, что приводит к перемещению муфты последнего. Вместе с му( [)той смещается от нейтрального положений] з9 9тннК сообщая одну НЗ полостей гидроцилиндра с напорной гидролинией И вспомогательной насосной установки, а противоположную полость со сливной гидролинией. Поршень 7 под действием возникшего в полостях гидроцилиндра 8 перепада [c.19]
Для того чтобы обеспечивался необходимый приток энергоносителя к двигателю при разных нагрузках, задвижка должна занимать разные положения. Соответственно разные установившиеся положения должен иметь и поршень 7 гидроцилиндра. Однако при всех установившихся положениях поршня гидроцилиндра золотник будет находиться в нейтральном положении. Следовательно, равновесное положение точки Е рычага ВЕС должно быть неизменным. Точка С этого рычага вместе со штоком поршня гидроцилиндра может занимать разные положения, в связи с чем процесс регулирования закончится при той угловой скорости вала двигателя, при которой муфта центробежного маятника (точка А) займет согласованное с точками и О положение. По схеме регулятора легко проследить, что при больших открытиях задвижки установившаяся угловая скорость вала двигателя будет меньше, чем при малых открытиях задвижки. Если построить зависимость установившейся угловой скорости вала двигателя от открытия задвижки, то получим статическую характеристику 1 (рис.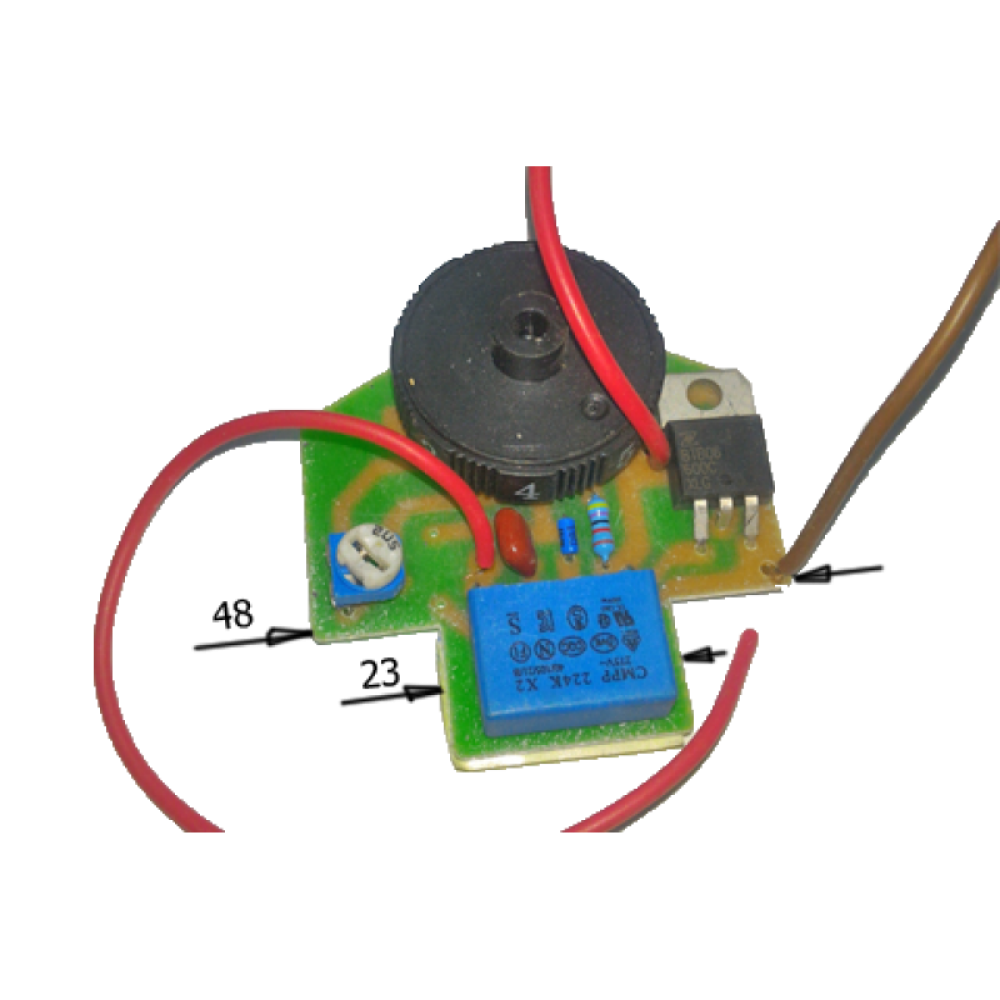 1.5, б). Предположим, что в точке Р отключена обратная связь 6 и этот конец рычага закреплен на внешней опоре. Теперь золотник может занимать нейтральное положение при любом положении задвижки 9 и одном и том же положении муфты центробежного маятника, поэтому регулятор имеет возможность поддерживать одну и ту же постоянную угловую скорость вала двигателя при любом открытии задвижки (статическая характеристика 2 на рис. 1.5, б). [c.20]
1.5, б). Предположим, что в точке Р отключена обратная связь 6 и этот конец рычага закреплен на внешней опоре. Теперь золотник может занимать нейтральное положение при любом положении задвижки 9 и одном и том же положении муфты центробежного маятника, поэтому регулятор имеет возможность поддерживать одну и ту же постоянную угловую скорость вала двигателя при любом открытии задвижки (статическая характеристика 2 на рис. 1.5, б). [c.20]
Импульсом для регулятора разрежения является разрежение в верхней части топочной камеры, замеряемое мембранным датчиком. При изменении разрежения в импульсной точке мембрана датчика перемещается и через шток поворачивает главный рычаг регулятора. При этом перемещается распределительный золотник, к которому газ поступает из трубопровода после газораспределительного пункта. Когда разрежение в топочной камере соответствует заданному значению, золотник устанавливается в нейтральное положение и давление газа в полостях под и над поршнем исполнительного механизма одинаково.
 При отклонении разрежения от заданного значения золотник сместится, вследствие чего давление газа в одной из полостей поршневого исполнительного механизма станет больше, чем в другой, и поршень начнет перемещаться, изменяя положение заслонки, регулирующей тягу котла в результате нарушенное равновесие будет восстанавливаться. Регулятор разрежения имеет обратную связь по положению регулирующего органа. Регулятор разрежения также имеет кран ручного дистанционного управления. Разность давлений газа, поступающего в полости поршневого исполнительного механизма, контролируется по манометру. [c.136]
При отклонении разрежения от заданного значения золотник сместится, вследствие чего давление газа в одной из полостей поршневого исполнительного механизма станет больше, чем в другой, и поршень начнет перемещаться, изменяя положение заслонки, регулирующей тягу котла в результате нарушенное равновесие будет восстанавливаться. Регулятор разрежения имеет обратную связь по положению регулирующего органа. Регулятор разрежения также имеет кран ручного дистанционного управления. Разность давлений газа, поступающего в полости поршневого исполнительного механизма, контролируется по манометру. [c.136] Уравнение (13.70) показывает, что при наличии позиционной нагрузки дополнительная отрицательная обратная связь по перепаду давлений в исполнительном гидродвигателе не только увеличивает демпфирование гидродвигателя, но и создает установившуюся ошибку по току управления, изменяя смещение х, золотника в зависимости от положения выходного звена. Этот недоста-тон может быть устранен, если дополнительную обратную связь по перепаду давления в исполнительном гидродвигателе выполнить аналогичной изодромной обратной связи, применявшейся еще в первых регуляторах непрямого действия (см. гл. 1). При такой обратной связи создается сигнал Хо. е. который изменяется в зависимости от перепада давления так же, как изменяется выходная величина реального дифференцирующего звена, т. е. [c.394]
гл. 1). При такой обратной связи создается сигнал Хо. е. который изменяется в зависимости от перепада давления так же, как изменяется выходная величина реального дифференцирующего звена, т. е. [c.394]
Обратная связь по скорости выходного звена привода осуществляется с помощью электрических или гидромеханических устройств. При использовании электрических устройств непосредственно измеряется скорость выходного звена либо производится дифференцирование по времени СИГНала ОТ Датчика, измеряющего положение выходного звена. Полученные с датчиков сигналы поступают в усилитель электрических сигналов. Гидромеханические устройства в виде регуляторов скорости выходного [c.399]
Рассмотрим подробно схему действия регулятора непрямого действия с жесткой обратной связью. Как видно из схемы (рис. 143), при перемещении поршня сервомотора влево (на закрытие регулирующих органов) точка I рычага Н18 через обратную связь перемещается вверх. Враш,аясь вокруг точки Н соединения рычага с муфтой центробежного маятника 3, рычаг своим правым концом перемещает тело распределительного золотника 4 вверх, возвращая его в среднее положение, показанное пунктиром 2.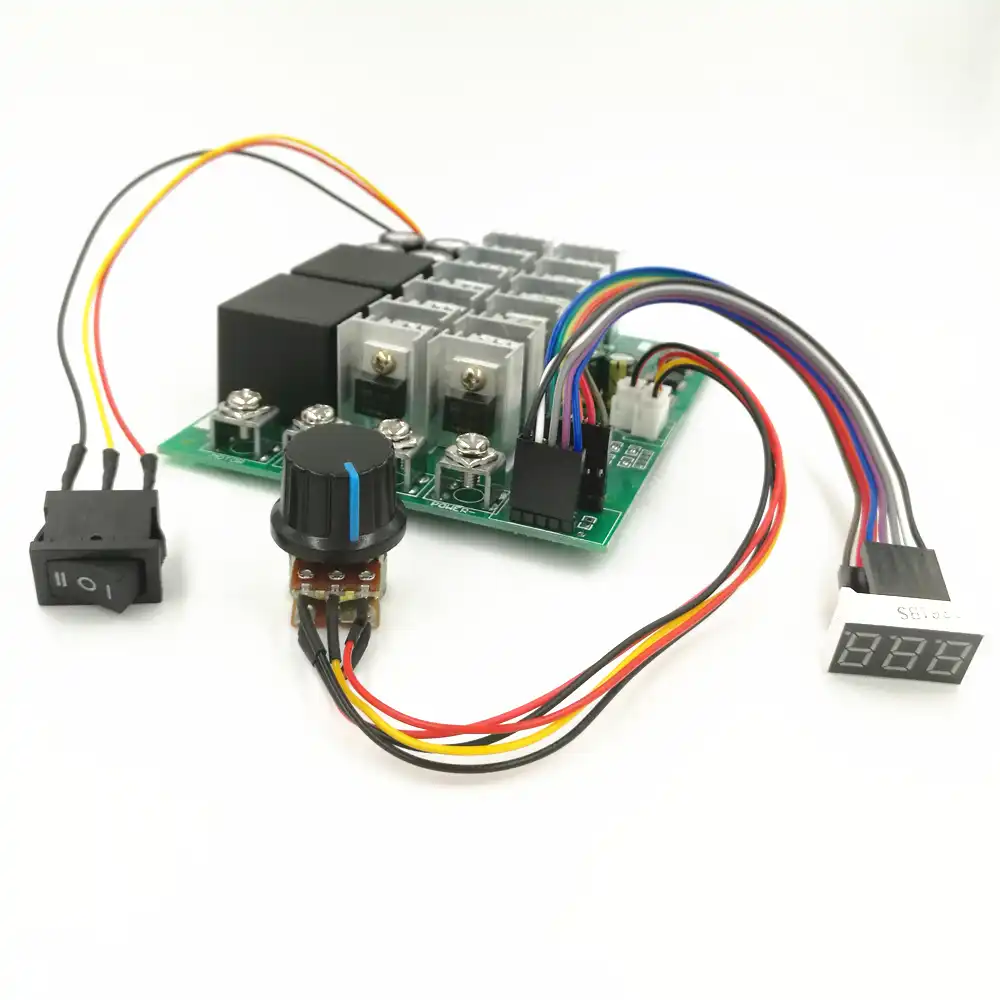 После нескольких колебаний, по причинам, рассмотренным ниже, поршень сервомотора 5 прекращает свое перемещение, и тем самым процесс регулирования заканчивается. Новое установившееся число оборотов окажется при этом несколько выше первоначального и будет соответствовать новому положению муфты регулятора. [c.266]
После нескольких колебаний, по причинам, рассмотренным ниже, поршень сервомотора 5 прекращает свое перемещение, и тем самым процесс регулирования заканчивается. Новое установившееся число оборотов окажется при этом несколько выше первоначального и будет соответствовать новому положению муфты регулятора. [c.266]
Действие изодромного механизма заключается в следующем. Рассматривая, как и в предыдущих случаях, сброс нагрузки, видим, что в первый момент времени точка 2 получает быстрое перемещение вверх и возвращает распределительный золотник в среднее положение. Это происходит потому, что в начале процесса масло, заключенное в цилиндре катаракта из-за малых отверстий в поршне, не успевает перетекать из нижней полости в верхнюю и поэтому своим давлением увлекает вверх и поршень катаракта, с которым жестко соединена точка 2. Благодаря этому перемещению точки 2 пружина изодромного механизма оказывается несколько сжатой. До этого момента, как видно, регулятор работает почти аналогично регулятору с жесткой обратной связью, и скорость вращения вала турбины оказывается несколько повышенной. Затем под действием упругих «сил пружины 3 точка 2 начинает медленно перемещаться вниз, соответственно приоткрывая окна распределительного золотника на закрытие, что влечет за собой дополнительное движение поршня сервомотора, а вместе с ним и других регулирующих органов на закрытие. Таким образом, скорость вращения агрегата начинает медленно понижаться и приближаться к первоначальной. Медленное перемещение точки 2 под действием пружины обусловлено медленным перетеканием масла из одной полости в другую из-за сопротивления в дроссельных отверстиях катаракта. Это перемещение будет происходить до тех пор, пока пружина вновь придет в свободное состояние, т. е. будет не сжата и не растянута. Тогда, как видно из схемы, точка 2 рычага 2 придет в конце регулирования в то же положение, как и до процесса регулирования. Следовательно, прежнее положение займет и муфта Н маятника, т. е. скорость вращения агрегата будет в точности такой, какой была до сброса нагрузки. Аналогично протекает действие регулятора при набросе нагрузки, только перемещения всех механизмов происходят в обратном направлении.
Затем под действием упругих «сил пружины 3 точка 2 начинает медленно перемещаться вниз, соответственно приоткрывая окна распределительного золотника на закрытие, что влечет за собой дополнительное движение поршня сервомотора, а вместе с ним и других регулирующих органов на закрытие. Таким образом, скорость вращения агрегата начинает медленно понижаться и приближаться к первоначальной. Медленное перемещение точки 2 под действием пружины обусловлено медленным перетеканием масла из одной полости в другую из-за сопротивления в дроссельных отверстиях катаракта. Это перемещение будет происходить до тех пор, пока пружина вновь придет в свободное состояние, т. е. будет не сжата и не растянута. Тогда, как видно из схемы, точка 2 рычага 2 придет в конце регулирования в то же положение, как и до процесса регулирования. Следовательно, прежнее положение займет и муфта Н маятника, т. е. скорость вращения агрегата будет в точности такой, какой была до сброса нагрузки. Аналогично протекает действие регулятора при набросе нагрузки, только перемещения всех механизмов происходят в обратном направлении.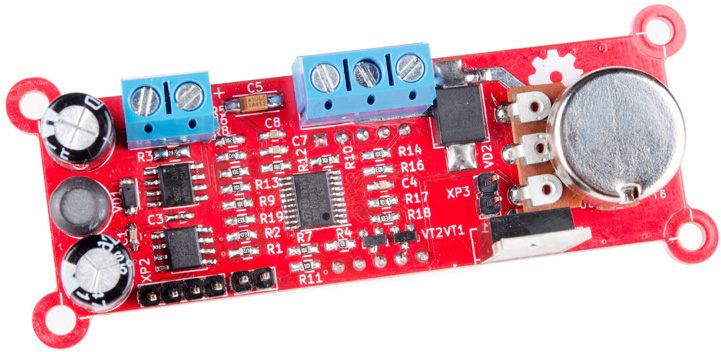 [c.269]
[c.269]
Для возвращения всей системы регулирования, в Тйм числе и тела главного золотника, в среднее положение вступает в действие обратная связь. Ее передача повернет вал выключателя 15 в сторону закрытия и сместит ползунки потенциометров 13 и 14. При этом сигналы от потенциометров поступают в электрическую часть регулятора, откуда после суммирования, формирования и усиления поступают на катушку исполнителя 10. Последняя, смещаясь вверх, возвращает тело главного золотника 21 в среднее положение. Регулирующие органы турбины придут в новое положение, соответствующее нагрузке на агрегат. При набросе нагрузки регулятор действует в той же последовательности, но все перемещения и подача сигналов производятся в обратном порядке. [c.298]
На рис. 2 показана принципиальная схема автоматизированного гидропривода с управлением режимами подач по заданной программе при помощи дросселя с регулятором и гидравлической корректирующей обратной связи по скорости. Масло от главного насоса 14 по нагнетательному трубопроводу 13 через дроссель 12 с регулятором типа Г55-14 и по трубопроводу 10 через золотник 9 реверса поступает в рабочую полость цилиндра 7. Затем из штоковой полости цилиндра 7 оно проходит по сливному трубопроводу 8 через золотник 9 реверса по трубопроводу И, через второй золотник 33 реверса по трубе 32, через регулируемый дроссель 47 (измеритель расхода диафрагменного типа) и по сливной трубе через подпорный кран 44 сливается в бак. Одновременно масло по трубам 45 и 46 через диафрагменные отверстия акт поступает в полости цилиндра управления 5 , в котором создается перепад давления, перемещающий поршень 35. Диафрагмы пит обеспечивают плавное перемещение поршня 35. При изменении перепада давления в цилиндре управления 34 поршень 35 перемещает шаблон 37 корректирующего устройства. В конце рабочего хода переключаются электрогидравлические золотники 9 п 33 реверса. От насоса 18, питающего устройство управления гидросистемы, через золотник 33 по трубе 48 масло поступает в цилиндр 43 и перемещает его поршень 42 и шток 39 (поддерживаемые до поступления масла в цилиндр 43 в верхнем положении пружиной 41) вниз по схеме.
Масло от главного насоса 14 по нагнетательному трубопроводу 13 через дроссель 12 с регулятором типа Г55-14 и по трубопроводу 10 через золотник 9 реверса поступает в рабочую полость цилиндра 7. Затем из штоковой полости цилиндра 7 оно проходит по сливному трубопроводу 8 через золотник 9 реверса по трубопроводу И, через второй золотник 33 реверса по трубе 32, через регулируемый дроссель 47 (измеритель расхода диафрагменного типа) и по сливной трубе через подпорный кран 44 сливается в бак. Одновременно масло по трубам 45 и 46 через диафрагменные отверстия акт поступает в полости цилиндра управления 5 , в котором создается перепад давления, перемещающий поршень 35. Диафрагмы пит обеспечивают плавное перемещение поршня 35. При изменении перепада давления в цилиндре управления 34 поршень 35 перемещает шаблон 37 корректирующего устройства. В конце рабочего хода переключаются электрогидравлические золотники 9 п 33 реверса. От насоса 18, питающего устройство управления гидросистемы, через золотник 33 по трубе 48 масло поступает в цилиндр 43 и перемещает его поршень 42 и шток 39 (поддерживаемые до поступления масла в цилиндр 43 в верхнем положении пружиной 41) вниз по схеме. При перемещении вниз шток [c.50]
При перемещении вниз шток [c.50]
Регулятор давления пара снабжен жесткой обратной связью по положению топливного сервомотора. [c.131]
Схема работает следующим образом. Расход воды, поступающей на обработку, измеряется дифманометром и вторичным прибором типа ЭПИД. Берется прибор ЭПИД, имеющий реостатный вторичный датчик, который включается на вход регулятора. Регулятор работает в режиме регулирования соотношения. Сигнал с регулятора поступает на магнитный пускатель, который управляет исполнительным механизмом, приводящим в действие регулирующий орган дозатора. Жесткая обратная связь осуществляется с помощью индукционной катушки, помещенной в колонке дистанционного управления. Катушка включена на второй вход регулятора. Таким образом, эта часть схемы образует следящую систему, в которой положение регулирующего органа од- [c.215]
Регуляторы изодромные — регуляторы с упругой обратной связью, совмещающие свойства пропорционального и астатического регуляторов и приводящие регулируемую величину к заданному значению независимо от нагрузки или положения регулирующего органа. [c.304]
В статическом режиме работы регулятора, как уже говорилось выше, используется обратная связь по положению регулирующего органа. [c.88]
Регулятор РУ4-16А, представляющий собой автоматическое регулирующее устройство приборного типа, изодромное с предварением на КС, предназначен для работы от одного реостатного датчика с любой зоной пропорциональности и различным сопротивлением (при 100%-ной зоне пропорциональности применяется датчик на 300 ом). Исполнительный механизм должен иметь реостат обратной связи на 120 ом и выключатели конечных положений. Регулятор может быть настроен на режим пропорционального, астатического и изодромного регулирования, а также регулирования с введением сигнала первой производной. [c.93]
В систему обратной связи такого регулятора введен масляный катаракт 1, а точка 2 рычага 2 соединена с пружиной 3, которая во время установившегося режима работы агрегата остается в свободном состоянии (не сжата и не растянута) и поддерживает точку Z в одном и том же положении. Катаракт представляет собой цилиндр, наполненный маслом, в котором помещается поршень, имеющий малые дроссельные отЕ ерстия. Через эти отверстия масло медленно перетекает из одной полости цилиндра в другую при смещении поршня из среднего положения. [c.269]
Катаракт представляет собой цилиндр, наполненный маслом, в котором помещается поршень, имеющий малые дроссельные отЕ ерстия. Через эти отверстия масло медленно перетекает из одной полости цилиндра в другую при смещении поршня из среднего положения. [c.269]
Для целей регулирования температуры дутья могут быть применены астатические и изодромные регуляторы, у которых остаточная неравномерность, т. е. отклонение регулируемого параметра от задания, не устраняемое регулятором, равно нулю. Характерной особенностью изодромного регулятора является то, что регулирующий орган вначале занимает положение, зависящее от отклонения регулируемого параметра, а затем, благодаря наличию упругой обратной связи, совершает дополнительное перемещение для возврата регулируемого параметра к заданному. На рис. 165 показана схема регулирования температуры паровоздушного дутья с изодромным пневматическим регулятором типа 04-ТГ-410. [c.391]
В модификации ГИМ исполнительный механизм не снабжается устройством обратной связи. В модификации ГИМ-2Д для введения в схему регулирования жесткой связи по положению сервомотора установлены 2 дифференциально-трансфор.маторных датчика, плунжеры которых при помощи рычажной системы кинематически связаны с валом сервомотора. Оба датчика одновременно могут использоваться в схемах регулирования, когда один служит для образования жесткой обратной связи данного регулятора,а второй меняет задание другому регулятору. На этом же принципе может быть реализована схема слежения. Модификация ГИМ-Д2И имеет 2 датчика устройства изодромной обратной связи с одинаковым временем изодрома для обоих датчиков и датчик жесткой обратной связи. [c.533]
В модификации ГИМ-2Д для введения в схему регулирования жесткой связи по положению сервомотора установлены 2 дифференциально-трансфор.маторных датчика, плунжеры которых при помощи рычажной системы кинематически связаны с валом сервомотора. Оба датчика одновременно могут использоваться в схемах регулирования, когда один служит для образования жесткой обратной связи данного регулятора,а второй меняет задание другому регулятору. На этом же принципе может быть реализована схема слежения. Модификация ГИМ-Д2И имеет 2 датчика устройства изодромной обратной связи с одинаковым временем изодрома для обоих датчиков и датчик жесткой обратной связи. [c.533]
Основным параметром, по которому ведется регулирование, является давление пара в главной паровой магистрали. При нарушении соотношения между производством и потреблением пара изменяется давление в паровой магистрали. При этом серводвигатель топлива (рис. 4. 1) через шток и систему рычагов воздействует на заслонку 1 д, регулирующую подачу газа к горелкам. Регулятор давления пара имеет жесткую обратную связь по положению серводвигателя топлива, которой при перемещении поршня серводвигателя подается соответствующий импульс на регулятор давления, обеспечивающей пропорциональное регулирование. [c.82]
Регулятор давления пара имеет жесткую обратную связь по положению серводвигателя топлива, которой при перемещении поршня серводвигателя подается соответствующий импульс на регулятор давления, обеспечивающей пропорциональное регулирование. [c.82]
Эластичная мембрана 1 воспринимает регулируемое давление, прогибается пропорционально ему и стремится повернуть струйную трубку 2. Повороту противодействует пружина 3, к-рая воздействует на струйную трубку через подвешенный рычаг 4 и перемещающуюся опору 5, укрепленную па винте 6 (этот механизм наз. угловым корректором). Угловой корректор позволяет настраивать струйный усилитель на различные коэфф. усиления, зависящие от уд. поворота струйной трубки, и на предельные значения давления на мембране. В зависимости от положения струйной трубки масло поступает в левую или правую полость исполнительного механизма и в правую или левую полость цилиндра изодрома,заставляя перемещаться влево или вправо поршень 7 изодрома. Обе полости последнего-сообщаются каналом с игольчатым клапаном S и образуют катаракт, жесткость и постоянная времени к-рого настраиваются этим клапаном. Пружина 9 изодрома (т. наз. нулевая пружина) деформируется при перемещении поршня 7 и стремится поставить его в равновесное положение после перемещения (при любом положении поршня исполнительного механизма). Шток поршня 7 связан рычагом 10 с механизмом натяжения пружины 3, создавая отрицательную обратную связь. При повышении давления над мембраной струйная трубка, поворачиваясь против часовой стрелки, сжимает эту пружину одновременно поршень 7 перемещается влево и увеличивает ее натяжение это заставляет струйную трубку повернуться по часовой стрелке. Коэфф. обратной связи настраивается перемещением оси качания 11 рычага 10. При закрытом клапане поршень 7 перемещается пропорционально-синхронно с поршнем исполнительного механизма. Жесткость катаракта бесконечно велика, и регулятор работает как статич. с остаточной ошибкой, величина к-рой зависит от жесткости пружины з и положения оси качания 11. Наоборот, при полном открытии клапана 8 поршень 7 перемещается мало, пружина 9 почти не деформируется, и обратная связь мало ощутима.
Пружина 9 изодрома (т. наз. нулевая пружина) деформируется при перемещении поршня 7 и стремится поставить его в равновесное положение после перемещения (при любом положении поршня исполнительного механизма). Шток поршня 7 связан рычагом 10 с механизмом натяжения пружины 3, создавая отрицательную обратную связь. При повышении давления над мембраной струйная трубка, поворачиваясь против часовой стрелки, сжимает эту пружину одновременно поршень 7 перемещается влево и увеличивает ее натяжение это заставляет струйную трубку повернуться по часовой стрелке. Коэфф. обратной связи настраивается перемещением оси качания 11 рычага 10. При закрытом клапане поршень 7 перемещается пропорционально-синхронно с поршнем исполнительного механизма. Жесткость катаракта бесконечно велика, и регулятор работает как статич. с остаточной ошибкой, величина к-рой зависит от жесткости пружины з и положения оси качания 11. Наоборот, при полном открытии клапана 8 поршень 7 перемещается мало, пружина 9 почти не деформируется, и обратная связь мало ощутима. При этом режим регулятора приближается к астатическому. [c.297]
При этом режим регулятора приближается к астатическому. [c.297]
Описанная принципиальная схема регулятора давления обычно усложняется добавлением к ней так. называемой обратной связи, т. е. приспособления для возврата трубки 6 (пос.пе воздействия масла на поршень сервомотора) в среднее положение. Это способствует более ровной работе регулятора и уменьшению колебаний давления в газосборнике. [c.79]
Регулирование с жесткой обратной связью, при котором каждому положению муфты регулятора соответствует положение сервомотора, называют также статическим, в отличие от астатического регулирования, где такого соответствия нет. [c.95]
Регулятор давления со струйной трубкой 3 получает импульс по величине давления в камере отбора пара до регулирующих клапанов низкого давления. Б качестве чувствительного элемента применена трубка Бурдона 4. При повышении давления трубка 4 разгибается и перемещает струйную трубку 3 влево, что приводит к увеличению давления масла под поршнем 1 и уменьшению в полости над ним.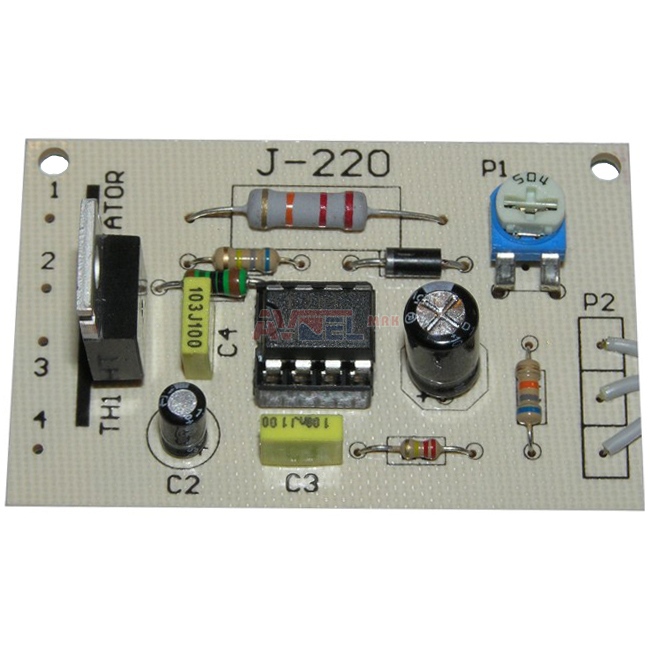 Поршень 1 перемещается вверх и поднимает рычаг 14 в точке Л, а также через тягу 2 поднимает и рычаг обратной связи, и трубка 3 возвращается в среднее положение. [c.124]
Поршень 1 перемещается вверх и поднимает рычаг 14 в точке Л, а также через тягу 2 поднимает и рычаг обратной связи, и трубка 3 возвращается в среднее положение. [c.124]
Опыт эксплуатации показывает, что колебания давления газа резко ухудшают режим горения, вследствие чего возникает значительный химический недожог (3—7%) [Л. 4-14]. Поэтому целесообразно автоматическое поддержание постоянного давления газа. Для этого на одной из станций Азэнерго использован обычный электромеханический регулятор типа РИД. Регулятор установлен на расстоянии 100 м от котельной. Импульс берется около заслонок, расположенных вблизи от регулятора. Обратная связь осуществляется по положению регулирующего органа. [c.220]
Наибольшую точность регулировки обеспечивают электронные регуляторы, собранные на транзисторах и не имеющие измеряющего механизма. Регулировка может вестись в температурном интервале от —250 до -fl800° , причем датчиками служат термопары или термометры сопротивления. Приборы для осуществления электронной или термической обратной связи либо встроены в регулятор, либо могут быть дополнительно подключены. Способ установки заданного значения может быть аналоговым или цифровым. Соответствующий программный задатчик позволяет вести регулирование температуры по определенной программе. Синхронный мотор поворачивает с определенной скоростью задающий потенциометр, что обеспечивает постоянную скорость изменения температуры. В другом варианте соответствующим образом вырезанная шайба вращается вокруг своей оси, в то время как положение ее края контролируется механическим или фотоэлектрическим способом. Снятый сигнал передается на задатчик регулятора. Такой способ позволяет производить изменения температуры по произвольной программе. Электронные регуляторы необходимо дополнять исполнительным механизмом в виде выключающего реле. Кроме того, они не являются показывающими приборами. Для считывания показания должен подключаться независимый измерительный прибор. [c.
Приборы для осуществления электронной или термической обратной связи либо встроены в регулятор, либо могут быть дополнительно подключены. Способ установки заданного значения может быть аналоговым или цифровым. Соответствующий программный задатчик позволяет вести регулирование температуры по определенной программе. Синхронный мотор поворачивает с определенной скоростью задающий потенциометр, что обеспечивает постоянную скорость изменения температуры. В другом варианте соответствующим образом вырезанная шайба вращается вокруг своей оси, в то время как положение ее края контролируется механическим или фотоэлектрическим способом. Снятый сигнал передается на задатчик регулятора. Такой способ позволяет производить изменения температуры по произвольной программе. Электронные регуляторы необходимо дополнять исполнительным механизмом в виде выключающего реле. Кроме того, они не являются показывающими приборами. Для считывания показания должен подключаться независимый измерительный прибор. [c. 74]
74]
Феноменологическая трактовка такой системы основывается па общих положениях теории управления. В систему поступает входной сигнал, отличный от требуемого, от уставки . Разпость входного сигнала и уставки — сигнал ошибки. Назначение регулятора состоит в получении требуемого выходного сигнала. Система регулирования состоит из регулятора и объекта управления, она содержит контур обратной связи. [c.463]
Принципиальная схема регулятора БР-11 представлена на рис. П1.19. Питание входной схемы и цепи обратной связи по положению регулирующего орг2нн осуществляется от дсух об-моток трансформатора питания ТП. Часть напряжения, появляющегося при несовпадении задающего воздействия и текущего значения параметра регулирования, снимается с сопротив ления и подается на сетку левой половины лампы Лх типа 6Н9С. Второй каскад усилителя напряжения выполнен на правой половине той же лампы. Фазочувствительный усилитель мощности собран на двойном триоде Л типа 6Н8С. Входной сигнал подается на обе сетки. Аноды же питаются от разных обмоток трансформатора ТП со сдвигом фаз на 180°. Таким образом, в зависимости от фазы напряжения на сетках постоянный по знаку ток протекает в левой либо в правой половине лампы Л2. Нагрузкой триодов являются управляющие обмотки магнитных усилителей. При подмагничивании одного из усили- [c.86]
Входной сигнал подается на обе сетки. Аноды же питаются от разных обмоток трансформатора ТП со сдвигом фаз на 180°. Таким образом, в зависимости от фазы напряжения на сетках постоянный по знаку ток протекает в левой либо в правой половине лампы Л2. Нагрузкой триодов являются управляющие обмотки магнитных усилителей. При подмагничивании одного из усили- [c.86]
В системах автоматического дозирования реагентов совместно с электрическими регуляторами и регулирующими органами (см. главу IV) могут применяться исполнительные механизмы различных типов. Со стороны дозатора на выбор типа исполнительного механизма накладываются ограничения, связанные с видом перемещения (вращательное, поступательное), допустимым моментом вращения или усилием, величиной перемещения (углом поворота) и допустимым положением выходного вала. Возможность использования исполнительного механизма с тем или иным регулятором определяется временем полного хода выходного вала, наличием элемента обратной связи и его электрическими данными (сопротивлением, ичдук-тивдостью, развиваемой э.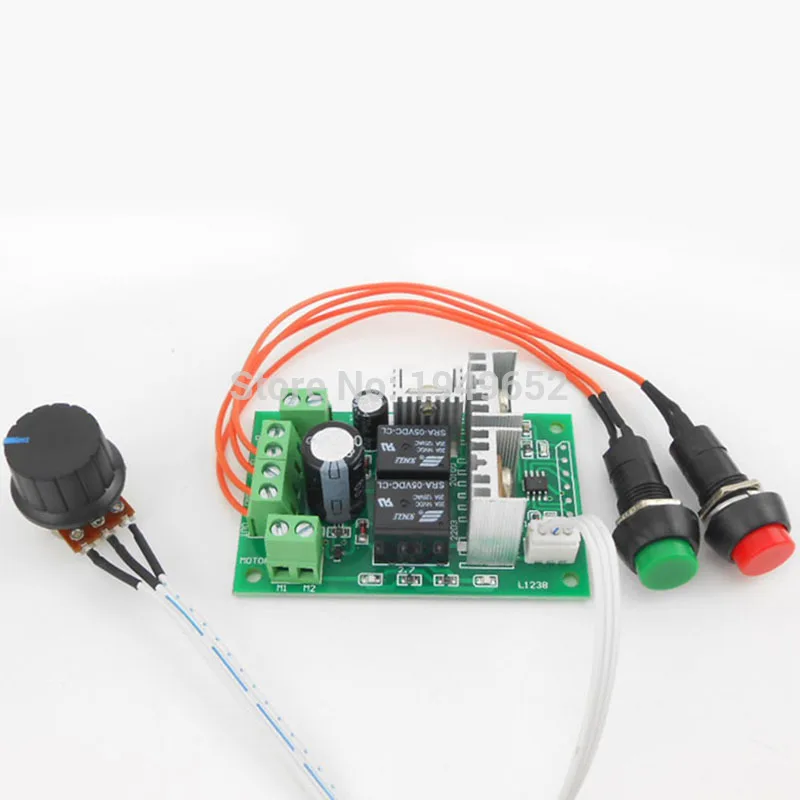 д. с. и т. д.), величиной выбега п наличием конечных выключателей. [c.94]
д. с. и т. д.), величиной выбега п наличием конечных выключателей. [c.94]
Нескомпенсированный сигнал моста усиливается (усилитель фирмы Brown 360415-2) и подается на мотор для балансировки нуля, чувствительный к изменению фазы и соединенный приводным механизмом с компенсационным потенциометром Р-2 и регулятором мощности. При повышении температуры колонки сигнал термобатареи Т-1, включенной последовательно с выходом моста, растет и подается в качестве отрицательной обратной связи на мост. Отклонение от установленного значения температуры колонки приводит к усилению обратной связи от Т-1, в результате чего подается компенсационный входной сигнал на усилитель с моста путем смещения в другое положение Р-2, связанного с регулятором мощности. Положение напряжения на нагревателе приводит к соответствующему отклонению от установленного значения Т-1. [c.129]
Особенность тракта передачи в полярографе ПУ-1 (рис. 5.8) заключается в возможности дифференцирования переменного тока по времени. Поскольку напряжение поляризации при развертке линейно изменяется во времени, то продифференцированная вольтамперограм-ма одновременно отражает и зависимость сИЩ от Е. Для этого служит дифференциальный усилитель с регулятором дифференцирования, в качестве которого применен интегральный операционный усилитель, в обратную связь которого включен другой интегральный операционный усилитель с конденсаторами с регулируемой емкостью в обратной связи. Эти конденсаторы служат для установления требуемой постоянной времени дифференцирования. Положение регулятора выбирают в зависимости от скорости развертки напряжения чем она больше, тем постоянная времени должна быть меньше. [c.79]
Поскольку напряжение поляризации при развертке линейно изменяется во времени, то продифференцированная вольтамперограм-ма одновременно отражает и зависимость сИЩ от Е. Для этого служит дифференциальный усилитель с регулятором дифференцирования, в качестве которого применен интегральный операционный усилитель, в обратную связь которого включен другой интегральный операционный усилитель с конденсаторами с регулируемой емкостью в обратной связи. Эти конденсаторы служат для установления требуемой постоянной времени дифференцирования. Положение регулятора выбирают в зависимости от скорости развертки напряжения чем она больше, тем постоянная времени должна быть меньше. [c.79]
Таким образом, каждому положению поршня сервомотора и регулирующего клапана соответствует определенное положение муфты регулятора скорости. Следовательно, в этой схеме, как и в схеме прямого регулирования, интервал изменения скорости вращения вала агрегата, соответствующий изменению нагрузки от холостого хода до максимальной, определяется степенью неравномерности регулирования. Отметим особенность этой схемы, заключающуюся в том, что структура связи 5 иная, чем в схеме прямого регулирования. В последнем случае регулятор действует только на клапан — эта связь называется прямой, поскольку она передает воздействие в прямом направлении от регулятора к машине. В схеме на рис. 3-7 есть и связь от серво-.мотора к золотнику. Эта связь называется самовыключением сервомотора, или обратной связью, так как, передавая импульс в обратном направлении, противодействует распространению прямого воздействия. При прямом регулировании (см. рис. 3-2) обратная связь осуществляется через саму машину. Наличие самовыключения позволяет улучшить динамические характеристики системы. [c.95]
Если удалить обратную связь от сервомотора 6 к пружине 4, то регулятор превратится в астатический. В этом случае при отклонении давления р от заданного натяжением пружины 4 струйная трубка 2 отклонится от среднего положения, что вызовет перемещение поршня серномотора б и подачу регулирующего воздействия в систему регулирования, направленного на восстановление заданного давления р.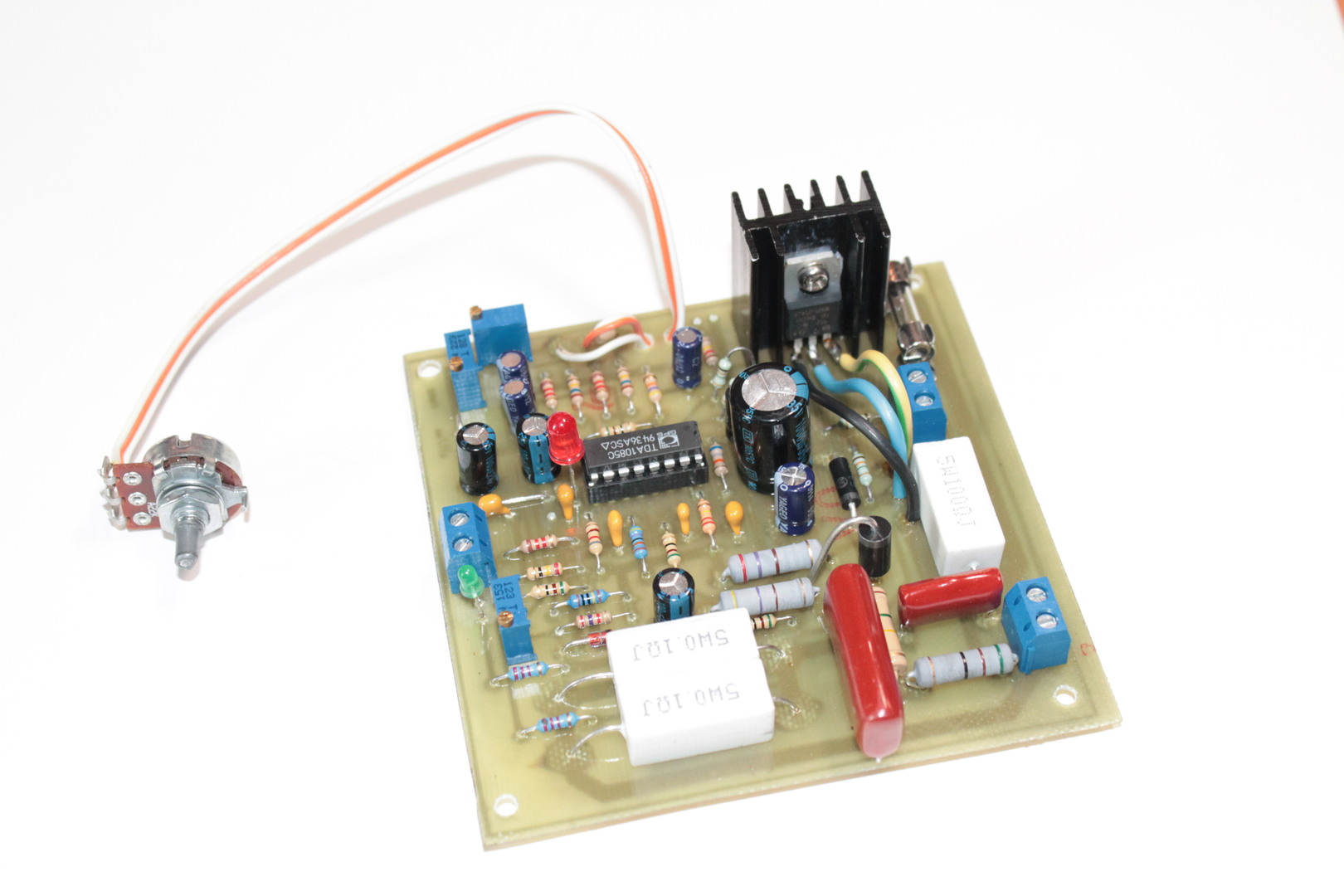 Так как натяжение пружины 4 при этом не изменится, струйная трубка вернется в исходное положение только при восстановившемся давлении р при новом положении поршня сервомотора 6. [c.103]
Так как натяжение пружины 4 при этом не изменится, струйная трубка вернется в исходное положение только при восстановившемся давлении р при новом положении поршня сервомотора 6. [c.103]
При регулировании производительности струйный регулятор 22 (с изодромным устройством 23), работающий от импульса при перепаде давлений на дроссельном устройстве во всасывающей линии компрессора В, перемещает поршень сервомотора 24. Одновременно поршень изодромного устройства 23 через рычаг обратной связи возвращает в среднее положение струйную трубку. Поршень 24 через рычаг перемещает золот- [c.120]
Все своими руками Регулятор оборотов на PIC
Опубликовал admin | Дата 16 июня, 2013Здравствуйте уважаемые посетители. Хочу предложить вашему вниманию полезную схемку регулятора оборотов двигателя постоянного тока, в частности двигателя электродрели. Схема устройства показана на рисунке 1. В принципе это приставка к блоку питания для работы с дрелью
Регулировка оборотов электродвигателей в настоящее время достигается не изменением питающего напряжения, а подачей на электромотор импульсов напряжения, разной длительности. Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсные модуляторы) регуляторы. В данной схеме режим широтно-импульсного регулирования обеспечивается микроконтроллером с соответствующей программой. Для управления скоростью вращения двигателя служат две кнопки SB1 и SB2, «Увеличение» и «Уменьшение» соответственно. Изменять скорость вращения двигателя дрели можно только при нажатой кнопке «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30% до 100%. Длительность импульса в 100%, это уже постоянный ток.
Для этих целей и служат, ставшие в последнее время очень популярными — ШИМ (широтно-импульсные модуляторы) регуляторы. В данной схеме режим широтно-импульсного регулирования обеспечивается микроконтроллером с соответствующей программой. Для управления скоростью вращения двигателя служат две кнопки SB1 и SB2, «Увеличение» и «Уменьшение» соответственно. Изменять скорость вращения двигателя дрели можно только при нажатой кнопке «Пуск». Длительность импульса при этом изменяется, в процентном отношении к периоду, от 30% до 100%. Длительность импульса в 100%, это уже постоянный ток.
В качестве стабилизатора напряжения питания микроконтроллера PIC16F628A, выбрана микросхема трехвыводного стабилизатора КР1158ЕН5В или Г, имеющая маленькое падение напряжение «вход-выход», которое равно всего 0,6В. Максимальное входное напряжение этой микросхемы — 30В. Все это позволяет использовать двигатели с напряжением питания от 6В до 27В. При использовании вами двигателя на большое напряжение, для данного случая, лучше пересчитайте номинал резистора R3 по формуле 1, возможно будет греться стабилитрон VD1. В качестве силового ключа применен составной транзистор КТ829А, способный выдерживать ток коллектора до 8А при напряжении насыщения – 2В. Имейте ввиду, что например, при токе потребления двигателем пяти ампер и падении напряжения на участке коллектор – эмиттер ключевого транзистора — два вольта, у вас на этом транзисторе выделится мощность в виде тепла, равная 5В • 2А = 10Вт. Для десяти ватт уже нужен радиатор, обеспечивающий отвод этого тепла от коллектора транзистора.
В качестве силового ключа применен составной транзистор КТ829А, способный выдерживать ток коллектора до 8А при напряжении насыщения – 2В. Имейте ввиду, что например, при токе потребления двигателем пяти ампер и падении напряжения на участке коллектор – эмиттер ключевого транзистора — два вольта, у вас на этом транзисторе выделится мощность в виде тепла, равная 5В • 2А = 10Вт. Для десяти ватт уже нужен радиатор, обеспечивающий отвод этого тепла от коллектора транзистора.
Кнопку «Пуск» установлена на дрели, эта кнопка непрерывного действия т.е. двигатель работает тогда, когда кнопка нажата. Схема собрана на печатной плате размерами 61 х 52мм. Скачать рисунок печатной платы, схему и файл прошивки можно здесь
Скачать “Регулятор оборотов микродрели на PIC-контроллере” Regul_drel.rar – Загружено 1047 раз – 14 КБ
.Просмотров:14 192
Jrk G2 21v3 USB-контроллер двигателя с обратной связью (разъемы припаяны)
Pololu Jrk G2 21v3 USB-контроллер мотора с обратной связью (разъемы припаяны)
Благодаря встроенной поддержке аналоговой обратной связи по напряжению или тахометру (частоте), семейство контроллеров двигателей Jrk второго поколения G2 упрощает добавление регулирования скорости или положения (но не обоих сразу!) Одного щеточного двигателя постоянного тока в замкнутый контур. множество проектов. Этот универсальный модуль общего назначения поддерживает пять различных интерфейсов управления: USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, RC-импульсные сервоимпульсы для использования в RC-системе и аналоговые напряжения для использования с потенциометром. или аналоговый джойстик.Он также предлагает множество настроек, которые можно настроить с помощью бесплатной программы настройки Pololu для Windows, Linux и macOS. Это программное обеспечение упрощает начальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB (для подключения Jrk G2 к компьютеру требуется USB-кабель micro-B).
множество проектов. Этот универсальный модуль общего назначения поддерживает пять различных интерфейсов управления: USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, RC-импульсные сервоимпульсы для использования в RC-системе и аналоговые напряжения для использования с потенциометром. или аналоговый джойстик.Он также предлагает множество настроек, которые можно настроить с помощью бесплатной программы настройки Pololu для Windows, Linux и macOS. Это программное обеспечение упрощает начальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB (для подключения Jrk G2 к компьютеру требуется USB-кабель micro-B).
Эта версия предлагает рабочий диапазон от 4,5 В до 28 В и может обеспечивать непрерывный выходной ток до 2,6 А (пиковое значение 5 А) без радиатора.Эта версия поставляется с припаянными штырями и клеммными колодками .
Основные характеристики семейства Jrk G2
- Простое управление одним щеточным электродвигателем постоянного тока по разомкнутому или замкнутому циклу
- Разнообразие интерфейсов управления:
- USB для прямого подключения к компьютеру
- TTL серийный, работающий при 5 В для использования с микроконтроллером
- I²C для использования с микроконтроллером
- RC-импульсные сервоимпульсы для использования в RC-системе
- Аналоговое напряжение для использования с потенциометром или аналоговым джойстиком
- Варианты обратной связи:
- Аналоговое напряжение (от 0 В до 5 В), для создания сервосистемы с обратной связью
- Частота , для регулирования скорости с обратной связью с использованием подсчета импульсов (для высокочастотной обратной связи) или синхронизации импульсов (для низкочастотной обратной связи)
- Нет , для регулирования скорости без обратной связи
- Примечание : Jrk не поддерживает , а не , используя квадратурные энкодеры для управления положением
- Ультразвуковой ШИМ 20 кГц для более тихой работы (вместо этого можно настроить использование 5 кГц)
- Простая настройка и калибровка через USB с помощью бесплатной программы настройки (для Windows, Linux и macOS)
- Настраиваемые параметры включают:
- Период ПИД и коэффициенты ПИД (параметры настройки обратной связи)
- Максимальный ток
- Максимальный рабочий цикл
- Максимальное ускорение и замедление
- Реакция на ошибку
- Калибровка входа (обучение) для аналогового и RC-управления
- Дополнительное обнаружение ошибок CRC устраняет ошибки связи, вызванные шумом или ошибками программного обеспечения
- Реверсивная защита
- Обновляемая прошивка на месте
- Дополнительное обнаружение отключения потенциометра обратной связи
- Библиотека Arduino позволяет легко начать использовать эти контроллеры с Arduino или совместимой платой .
- Подробное руководство пользователя
Jrk G2 21v3 работает с 4.От 5 В до 28 В и может обеспечивать непрерывный выходной ток 2,6 А (пиковое значение 5 А) без радиатора. Контроллер поддерживает переходные процессы (<500 мс) до 40 В, а максимальное рекомендуемое номинальное напряжение батареи составляет 24 В . Эта версия продается с припаянными разъемами , поэтому пайка не требуется.
Технические характеристики:
| Моторные каналы: | 1 |
| Интерфейс управления: | USB; неинвертированный TTL-последовательный порт; I²C; RC сервоимпульсы; аналоговое напряжение |
| Минимальное рабочее напряжение: | 4.5 В1 |
| Максимальное рабочее напряжение: | 28 В2 |
| Постоянный выходной ток на канал: | 2,6 A3 |
| Максимальная частота ШИМ: | 20 кГц |
| Версия: | 28 В макс. , Макс. 2,6 А непрерывно , Макс. 2,6 А непрерывно |
Размеры:
Размер 3.05 x 2,54 x 1,19 см (1,2 ″ × 1,0 ″ × 0,47 ″)
Вес: 7,5 г
Примечания:
- Питание Jrk G2 21v3 с напряжением питания от 4,5 В до 5,5 В может привести к тому, что его логическое напряжение будет ниже нормального, что может повлиять на работу. См. Руководство пользователя для получения дополнительной информации.
- Переходный режим (<500 мс) до 40 В.
- Типичные результаты при комнатной температуре и рабочем цикле 90% с VIN> 8 В.Работа от 4,5 В до 8 В снижает максимальный выходной ток.
Контроллеры Jrk G2 — это , а не , заменяющие оригинальные контроллеры Jrk из-за различий в их форм-факторах и расположении контактов, хотя изменения проводки должны быть несложными. Последовательный протокол Jrk G2 совместим (и, как правило, является расширенным набором) исходного последовательного протокола Jrk, поэтому во многих случаях программное обеспечение последовательного интерфейса, работающее на микроконтроллере или компьютере, не нужно модифицировать для работы с Jrk G2
.
Документы
Руководство пользователя контроллера мотора
Программное обеспечение и драйверы
Jrk G2 18v19 USB-контроллер двигателя с обратной связью
Благодаря встроенной поддержке аналоговой обратной связи по напряжению или тахометру (частоте) контроллеры двигателей Jrk второго поколения G2 упрощают добавление регулирования скорости или положения (но не обоих сразу!) Одного щеточного двигателя постоянного тока в замкнутый контур. множество проектов.Эти универсальные универсальные модули поддерживают пять различных интерфейсов управления: USB для прямого подключения к компьютеру, последовательный TTL и I²C для использования с микроконтроллером, RC-импульсные сервоимпульсы для использования в RC-системе и аналоговые напряжения для использования с потенциометром. или аналоговый джойстик. Они также предлагают множество настроек, которые можно настроить с помощью нашей бесплатной утилиты для настройки программного обеспечения для Windows, Linux и macOS. Это программное обеспечение упрощает начальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB (для подключения Jrk G2 к компьютеру требуется USB-кабель micro-B).
Это программное обеспечение упрощает начальную настройку устройства и позволяет проводить внутрисистемное тестирование и мониторинг контроллера через USB (для подключения Jrk G2 к компьютеру требуется USB-кабель micro-B).
Основные характеристики семейства Jrk G2
- Простое управление одним щеточным двигателем постоянного тока по разомкнутому или замкнутому циклу
- Разнообразие интерфейсов управления:
- USB для прямого подключения к компьютеру
- Последовательный TTL работает при 5 В для использования с микроконтроллером
- I²C для использования с микроконтроллером
- RC сервоимпульсы для использования в системе RC
- Аналоговое напряжение для использования с потенциометром или аналоговым джойстиком
- Варианты обратной связи:
- Аналоговое напряжение (от 0 В до 5 В), для создания сервосистемы с обратной связью
- Частота, для управления скоростью с обратной связью с использованием подсчета импульсов (для обратной связи по более высокой частоте) или синхронизации импульсов (для обратной связи с низкой частотой)
- Нет, для управления скоростью без обратной связи
- Примечание: Jrk не поддерживает использование квадратурных энкодеров для управления положением
- Ультразвуковой 20 кГн z ШИМ для более тихой работы (можно настроить на использование 5 кГц)
- Простая конфигурация и калибровка через USB с помощью бесплатной программы настройки (для Windows, Linux и macOS)
- Настраиваемые параметры включают:
- Период PID и PID коэффициенты (параметры настройки обратной связи)
- Максимальный ток
- Максимальный рабочий цикл
- Максимальное ускорение и замедление
- Реакция на ошибку
- Калибровка входа (обучение) для аналогового и RC-управления
- Дополнительное обнаружение ошибок CRC устраняет ошибки связи, вызванные шумом или сбои программного обеспечения
- Защита от обратного питания
- Прошивка, обновляемая на месте
- Обнаружение отключения дополнительного потенциометра обратной связи
- Библиотека Arduino упрощает начало использования этих контроллеров с Arduino или совместимой платой
- Подробное руководство пользователя
Fil e Загрузки
Руководство пользователя
Jrk G2 Software and Drivers for Windows (10MB msi)
Jrk G2 Software for Linux (x86) (9MB xz)
Jrk G2 Software for Linux (Raspberry Pi) (6MB xz)
Jrk G2 Software for macOS (8 МБ в упаковке)
Габаритная диаграмма контроллеров двигателей Jrk G2 18v19 и 24v13 (220k pdf)
3D-модель контроллеров двигателей Jrk G2 18v19 и 24v13 (шаг 11 МБ)
Руководство по сверлению для контроллеров двигателей Jrk G2 18v19 и 24v13 ( 83k dxf)
Рекомендуемые ссылки
Библиотека Jrk G2 для Arduino (это библиотека для Arduino IDE, которая помогает взаимодействовать с контроллером двигателя Jrk G2 USB с обратной связью с использованием последовательного порта или I²C. )
)
Исходный код программного обеспечения Jrk G2 (Этот репозиторий содержит исходный код утилиты настройки Pololu Jrk G2 (jrk2gui) и утилиты командной строки Pololu Jrk G2 (jrk2cmd). Он также содержит драйверы для Windows и инструкции по сборке.)
Jrk G2 18v19 работает от 6,5 В до 30 В и может обеспечивать непрерывный выходной ток 19 А без радиатора. Обратите внимание, что 30V — это абсолютный максимум для этого контроллера; максимальное рекомендованное рабочее напряжение составляет 24 В , а максимальное рекомендованное номинальное напряжение батареи составляет 18 В .Для приложений, использующих более высокое напряжение (например, батареи 24 В), мы рекомендуем более высокое напряжение Jrk G2 24v13 или Jrk G2 24v21.
Если вам нужно определить, какая у вас версия, вы можете просто подключить ее к компьютеру через USB, и программа Jrk сообщит вам об этом. Для быстрой визуальной идентификации без компьютера вы можете отличить эту версию от Jrk G2 24v13 такого же размера по номеру 150 на высоких серебряных электролитических конденсаторах.
Jrk поставляется с 0.Разъемная соединительная полоса 1 ″ и две 2-контактные клеммные колодки 5 мм. Вы можете припаять клеммные колодки к четырем большим сквозным отверстиям для подключения двигателя и питания двигателя (см. Наше короткое видео об установке клеммной колодки), или вы можете припаять 8-контактный кусок 0,1-дюймовой соединительной полосы в меньшую сквозные отверстия, которые граничат с этими большими отверстиями. Однако обратите внимание, что клеммные колодки рассчитаны только на 16 А, а каждая пара контактов разъема рассчитана только на комбинированные 6 А, поэтому для приложений с более высокой мощностью толстые провода следует припаять непосредственно к плате.
Кусочки 0,1-дюймовой полосы заголовка можно припаять к маленьким отверстиям на стороне логических подключений на плате, чтобы использовать их с беспаечными макетными платами, перфорированными платами или 0,1-дюймовыми разъемами, или вы можете припаять провода непосредственно к этим отверстиям для большей части компактная установка.
Примечание: Кабель USB A — micro-B (не входит в комплект) необходим для подключения Jrk G2 к компьютеру для начальной настройки.
Сравнение с оригинальными контроллерами двигателей Jrk
Семейство Jrk G2 имеет ряд улучшений по сравнению с нашими оригинальными двумя контроллерами двигателей Jrk (21v3 и 12v12).Что наиболее важно, контроллеры Jrk G2 поддерживают как более высокие рабочие напряжения, так и более высокие выходные токи, будучи даже более компактными, чем их предшественники. Другие функции включают:
- Настраиваемое аппаратное ограничение тока в версиях с более высокой мощностью — драйверы двигателя на Jrk G2 18v19, 18v27, 24v13 и 24v21 используют прерывание тока для активного ограничения тока двигателя, когда он превышает программно конфигурируемый порог ( Jrk G2 21v3 имеет фиксированное аппаратное ограничение тока и дополнительное программное ограничение тока)
- Более точное управление скоростью при низких частотах тахометра
- Интерфейс I²C предоставляет дополнительную возможность управления
- Возможность измерения VIN позволяет контролировать аккумулятор или источник питания
- USB Micro -B разъем (вместо Mini-B, как на оригинальных контроллерах Jrk)
- Настраиваемое ограничение замедления (оригинальные Jrks только поддерживали настраиваемое ограничение ускорения)
- Коэффициенты PID теперь можно настраивать на лету через последовательный порт, I²C и USB интерфейсы
Контроллеры Jrk G2 не заменяют оригинальные Контроллеры JRK из-за различий в их форм-факторах и расположении контактов, хотя изменения проводки должны быть простыми. Последовательный протокол Jrk G2 совместим (и, как правило, является надмножеством) исходного последовательного протокола Jrk, поэтому во многих случаях программное обеспечение последовательного интерфейса, работающее на микроконтроллере или компьютере, не нужно модифицировать для работы с Jrk G2.
Последовательный протокол Jrk G2 совместим (и, как правило, является надмножеством) исходного последовательного протокола Jrk, поэтому во многих случаях программное обеспечение последовательного интерфейса, работающее на микроконтроллере или компьютере, не нужно модифицировать для работы с Jrk G2.
(PDF) Управление скоростью привода двигателя постоянного тока на основе обратной связи по ошибке для переменного момента нагрузки с использованием нейронной сети
Международный журнал инженерных тенденций и технологий (IJETT) — Том 22, номер 2 — апрель 2015 г.
ISSN: 2231-5381 http: / / www.ijettjournal.org Page 69
Управление скоростью двигателя постоянного тока на основе обратной связи по ошибке
Привод для переменного момента нагрузки с использованием нейронной сети
Ахилеш Шарма #
1
;
Кришану Нат
# 2
; Амлеш Кумар
# 3
;
Амарджит Рой
# 4
# 1 Доцент кафедры электротехники
Северо-Восточный региональный институт науки и технологий
Нирджули, Аруначал-Прадеш, Индия.
# 2,3,4 Студенты бакалавриата, кафедра электротехники
Северо-восточный региональный институт науки и технологий
Нирджули, Аруначал-Прадеш, Индия.
Резюме. Благодаря универсальной характеристике регулирования скорости, двигатели постоянного тока
неотделимы от промышленности. Двигатели постоянного тока
, пожалуй, наиболее широко используемые преобразователи энергии в современных станках
и робототехнике. С увеличением использования полупроводниковых устройств
, управление скоростью двигателя постоянного тока
становится все более сложным и точным.Скорость двигателя DC
можно контролировать с помощью управления напряжением якоря, полевого управления
и методов управления сопротивлением якоря. Введение
MATLAB и Simulink заставило разработчиков
моделировать сложные схемы и изучать их характеристики. В
этой статье была сделана попытка управлять скоростью
электродвигателя постоянного тока с отдельным возбуждением с помощью метода управления напряжением якоря
, включающего нейронную сеть в качестве контроллера скорости для
постоянного, а также переменного момента нагрузки. Используя MATLAB,
Используя MATLAB,
Simulink и набор инструментов нейронной сети, было продемонстрировано всестороннее исследование
.
Ключевые слова: двигатель постоянного тока; нейронная сеть; контроль скорости;
моделирование
I. ВВЕДЕНИЕ
Хотя избыточное количество энергии доступно в различных формах
, их трудно использовать напрямую по
географическим и экономическим причинам. Эти энергоресурсы
недоиспользованы.Таким образом, необходимо преобразовать имеющуюся
энергии для удовлетворения потребностей человека и общества в целом. В преобразователе энергии
важную роль играет двигатель постоянного тока;
преобразование электрической энергии в механическую. В механической системе
регулировка скорости необходима для правильного выполнения механической работы
. Это позволяет легко управлять двигателем
[1]. Этот метод управления скоростью не зависит от нагрузки
на двигателе и позволяет дистанционно управлять скоростью.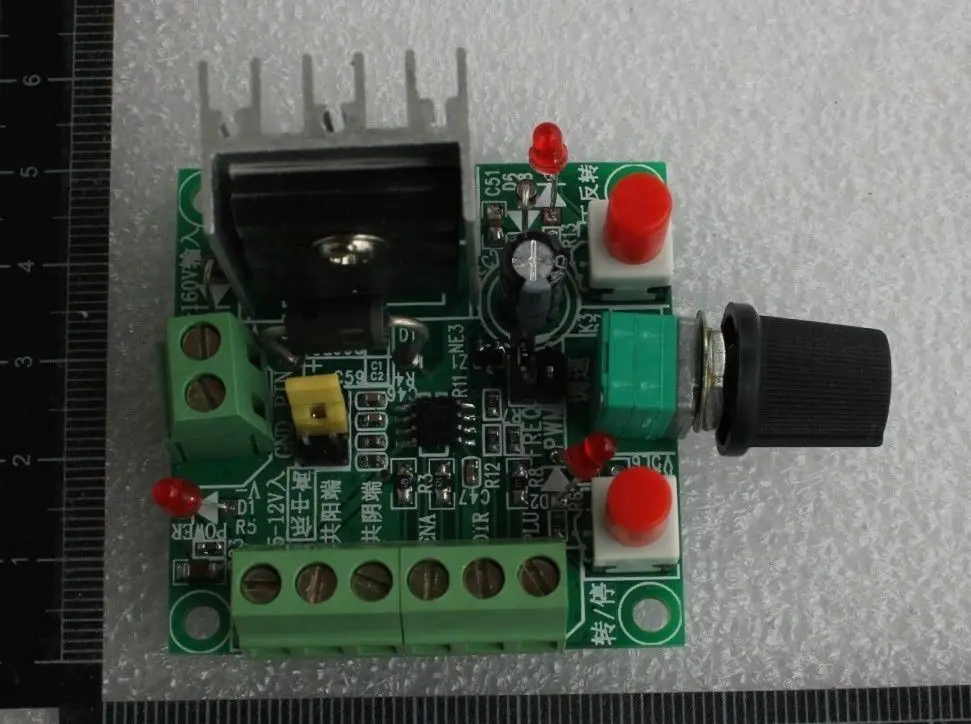 Введение приводов с регулируемой скоростью
Введение приводов с регулируемой скоростью
увеличивает автоматизацию
и производительность, а также ее эффективность. Вместо работы с постоянной скоростью
, если вводится привод с регулируемой скоростью, то эффективность привода
может быть увеличена с 15 до 27%. Этот
имеет множество преимуществ, таких как снижение загрязнения атмосферы
за счет снижения производства энергии, сохранения ценных природных ресурсов
и потребления [2].
Искусственная нейронная сеть (ИНС), также известная как нейронная сеть
, обрабатывает информацию так же, как человеческий мозг
. Сеть состоит из большого количества
взаимосвязанных элементов обработки, называемых нейронами, работающих параллельно
для решения конкретной проблемы. Он учится на примере, поэтому
может быть запрограммирован на выполнение конкретной задачи [4, 5]. Он имеет
многих полезных функций, таких как параллельная и распределенная обработка
, эффективное нелинейное отображение между входами и выходами
и надежность, без предварительного знания модели системы
[3].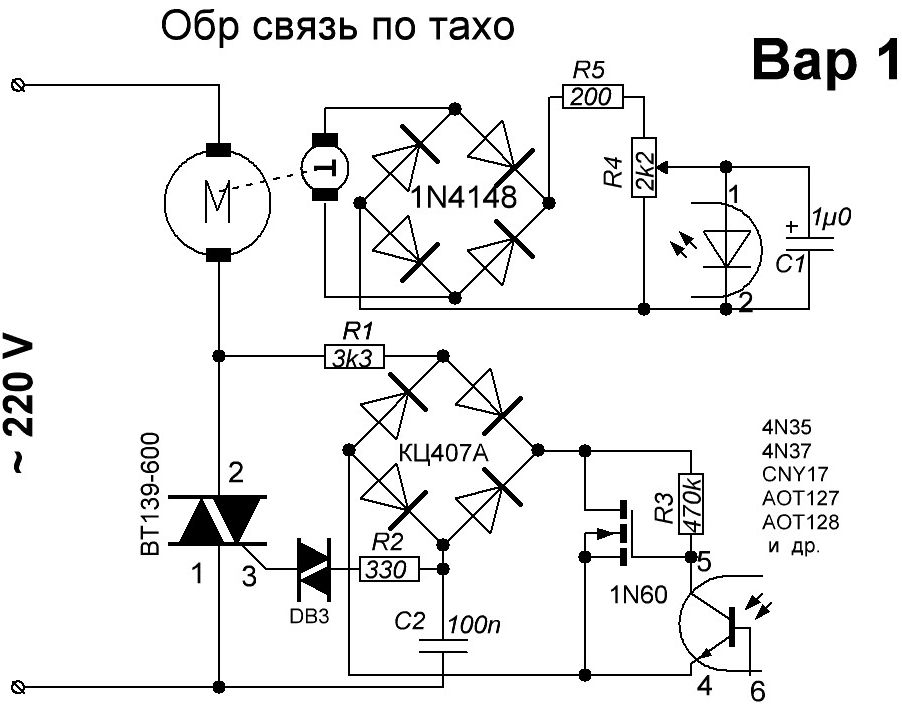 Многослойные нейронные сети были применены в
Многослойные нейронные сети были применены в
для идентификации и управления динамическими системами. Они используются
в системах управления с помощью следующих трех типичных
обычно используемых контроллеров нейронных сетей: прогнозирующее управление
, управление NARMA-L2 и эталонное управление модели [2].
Как и большинство нейронных контроллеров, они основаны на стандартной архитектуре линейного управления
. Есть ряд статей, в которых
используют приложения ИНС для определения математического D.C. Модель двигателя
, а затем эта модель применяется для управления скоростью двигателя
. Они также используют инвертирующую прямую ANN с параметрами входа
для адаптивного управления двигателем постоянного тока. Эта статья
об исследовании установившегося и динамического управления машиной постоянного тока
. При использовании скорости двигателя постоянного тока в качестве обратной связи генерируется сигнал ошибки
. К
К
применяется переменный момент нагрузки, чтобы проверить стабильность скорости двигателя.
.
II. ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА
Двигатель постоянного тока состоит из двух типов обмоток: обмотка ротора также
, известная как якорь, размещенная на якоре, и неподвижная обмотка
, размещенная на статоре двигателя постоянного тока. В целом, в двигателях постоянного тока
, за исключением бесщеточных двигателей с постоянными магнитами, ток
проходит через обмотки якоря, пропуская ток
через угольные щетки, которые скользят по набору медных поверхностей
, называемых коммутатором, который установлен на роторе.Многие приложения
требуют, чтобы скорость двигателя изменялась в широком диапазоне
. Одной из наиболее привлекательных особенностей двигателей постоянного тока
по сравнению с двигателями переменного тока является легкость, с которой можно изменять их скорость
. Управляющие уравнения двигателя постоянного тока
следующие:
000
(1)
(2)
AB-026: Стабилизатор скорости без датчика для двигателя постоянного тока
Введение
Скорость двигателя — это параметр двигателя постоянного тока, который часто измеряется и регулируется, обычно с помощью дополнительных датчиков и с обратной связью по замкнутому контуру. Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Для этого метода управления скоростью требуется какой-либо датчик скорости, обычно устанавливаемый на валу двигателя. Некоторые из наших двигателей постоянного тока и мотор-редукторов имеют задние валы специально для этой цели, например, 212-109.
Эта блок-схема представляет собой типичную систему управления с обратной связью, которая может быть разработана для работы в аналоговом или цифровом режиме.
Оптические датчики-го обычно используются с цифровыми контроллерами, в то время как аналоговые схемы часто используют тахогенераторы.С помощью ШИМ-управления можно достичь хорошей точности, гибкости и снизить потери мощности. Однако это происходит за счет дополнительного компонента и, возможно, модификации механической конструкции, если вы планируете использовать его в существующем продукте.
Для щеточных двигателей постоянного тока можно измерять и регулировать скорость без каких-либо датчиков на двигателе, используя основную характеристику — напряжение обратной ЭДС, зависящее от скорости.
Бессенсорное аналоговое измерение скорости двигателя
Двигатель постоянного тока моделируется как последовательное соединение внутреннего сопротивления и источника напряжения обратной ЭДС.Напряжение на клеммах двигателя складывается из обратной ЭДС и падения напряжения, превышающего сопротивление катушки.
Связаться
Поговорите с членом нашей команды.
Каталог двигателей
Ищете нашу продукцию?
Надежные и экономичные миниатюрные механизмы и двигатели, отвечающие вашим требованиям.
Эквивалентная схема электродвигателя постоянного тока с щеткойПадение напряжения на внутреннем сопротивлении якоря зависит от тока двигателя (и, следовательно, от момента нагрузки).Невозможно измерить скорость напрямую, измеряя только напряжение на клеммах двигателя.
Сопротивление обмотки Ra обычно постоянно — хотя оно имеет небольшую температурную зависимость, мы можем компенсировать его, чтобы падение напряжения на якоре двигателя было пропорционально току двигателя.
Поскольку невозможно измерить обратную ЭДС напрямую, нам необходимо рассчитать ее по следующему уравнению: 𝑉𝑚𝑜𝑡𝑜𝑟 = 𝑉𝑏𝑒𝑚𝑓 + (𝐼𝑎 × 𝑅𝑎)
К сожалению, напрямую измерить напряжение якоря также невозможно — однако мы можем подключить дополнительный (внешний) резистор последовательно с двигателем.Измерение падения напряжения на этом последовательном резисторе позволяет нам определить обратную ЭДС.
Эквивалентная схема щеточного двигателя постоянного тока с последовательным резисторомЕсли мы установим значение последовательного резистора равным сопротивлению в двигателе, мы гарантируем, что любое изменение падения напряжения на последовательном резисторе будет равно падению напряжения в якоре: 𝑉𝑎 = 𝐼𝑎 × 𝑅𝑎𝑉𝑠 = 𝐼𝑎 × 𝑅𝑠𝑅𝑠 = 𝑅𝑎𝑉𝑠 = 𝑉𝑎
Итак, сначала нам нужно узнать или измерить сопротивление якоря двигателя. Это можно сделать путем измерения сопротивления на клеммах двигателя с помощью омметра или путем измерения тока остановки с известным напряжением питания.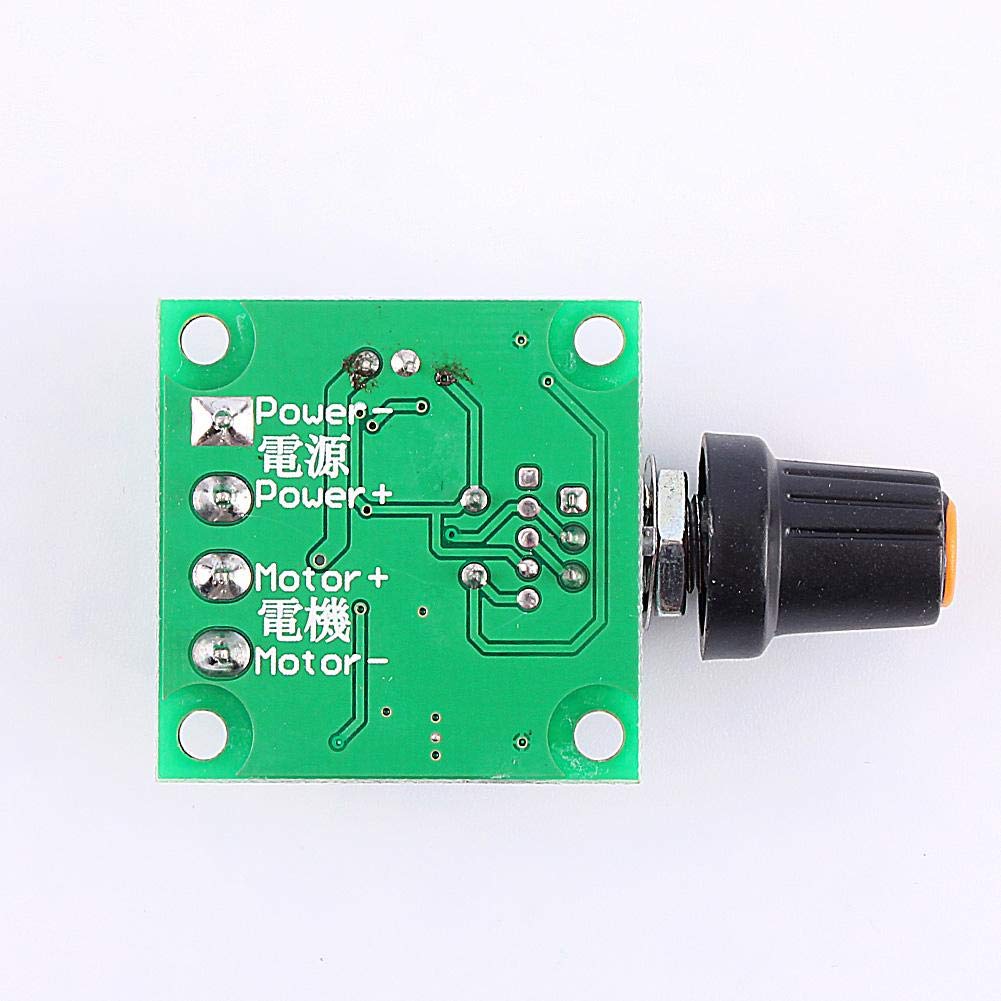 При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
При использовании последнего предпочтительнее использовать низкое напряжение питания, чтобы избежать повреждения из-за перегрузки по току.
Например, при питании двигателя 1,2 В и измерении 100 мА во время остановки сопротивление якоря рассчитывается как: = 𝐼𝑠𝑡𝑎𝑙𝑙 × 𝑅𝑎𝑅𝑎 = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦𝐼𝑠𝑡𝑎𝑙𝑙𝑅𝑎 = 1,2𝑉100𝑚𝐴𝑅𝑎 = 12 Ом
При использовании омметра для измерения оконечного сопротивления снимите среднее значение нескольких показаний при различных положениях ротора.
Напряжение питания будет равно напряжению последовательного резистора, напряжению сопротивления якоря и напряжению обратной ЭДС.𝑉𝑠𝑢𝑝𝑝𝑙𝑦 = 𝑉𝑠 + 𝑉𝑎 + 𝑉𝑏𝑒𝑚𝑓
Напряжение обратной ЭДС можно вычислить, вычтя удвоенное падение напряжения на последовательном резисторе из напряжения питания. = 𝑉𝑠𝑢𝑝𝑝𝑙𝑦– (2 × 𝑉𝑠)
Чтобы уменьшить потери мощности, мы можем использовать более низкое значение последовательного сопротивления, но резистор в конечном итоге снизит напряжение, воспринимаемое двигателем. Используя мостовую схему, мы можем сохранить высокую чувствительность измерения и компенсировать потери мощности в двигателе:
Мостовая схема для измерения напряжения обратной ЭДС Правая опора моста состоит из последовательно включенных электродвигателя M и резистора Rs . Левая ножка — последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Левая ножка — последовательное соединение резисторов R1 и R2 , каждая ножка подключена к источнику питания. Напряжение обратной ЭДС измеряется между точками A и B .
Rload представляет входное сопротивление нашей измерительной цепи. Поскольку он будет состоять из операционного усилителя, его входное сопротивление будет намного больше, чем другие сопротивления в этой схеме (идеальные операционные усилители имеют бесконечное входное сопротивление).
Нам необходимо убедиться, что напряжение между точками A и B не зависит от тока двигателя и напряжения питания и зависит только от скорости двигателя и входного сопротивления измерительной цепи ( Rload ).
Начнем с анализа схемы без обратной ЭДС, т.е. когда двигатель остановлен. Для балансировки моста напряжение между точками A и B должно быть нулевым. Это происходит до тех пор, пока соотношение между R1 и R2 такое же, как Rs и Ra : 𝑅2𝑅1 = 𝑅𝑎𝑅𝑠
ч — коэффициент усиления нашего моста: ℎ = 𝑅1𝑅2 = 𝑅𝑠𝑅𝑎
Если мы выводим двигатель из состояния остановки, напряжение обратной ЭДС пропорционально скорости: 𝑉𝑏𝑒𝑚𝑓 = 𝑘𝑒 × 𝑛
, где кэ, — электрическая постоянная для нашего двигателя, а n — скорость двигателя.
Если двигателю разрешено вращаться со скоростью холостого хода, для идеального двигателя мы ожидаем, что Ia равно 0. Это потому, что идеальные двигатели игнорируют сопротивление воздуха и трение подшипников. Напряжение на скорости холостого хода: = 𝑘𝑒 × 𝑛𝑁𝐿
Отсюда Vbemf может быть подписано как: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝑛𝑛𝑁𝐿 = 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Где K — коэффициент пропорциональности между Vbemf и V_rpm в нашей схеме.
Теперь мы можем составить систему уравнений для нашей схемы:
Текущие уравненияРешение для I5 : 𝐼5 = ℎ (ℎ + 1) 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑
Таким образом, выходное напряжение равно: 𝑉𝑟𝑝𝑚 = 𝐼5 × 𝑅𝑙𝑜𝑎𝑑 = ℎ (ℎ + 1) × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾2ℎ (𝑅𝑎 + 𝑅2) + (ℎ + 1) 2 × 𝑅𝑙𝑜𝑎𝑑 × 𝑅𝑙𝑜𝑎𝑑
А для работы без нагрузки: 𝑉𝑟𝑝𝑚 = ℎℎ + 1 × 𝑉𝑟𝑝𝑚𝑁𝐿 × 𝐾
Выходное напряжение между точками A и B не зависит от источника питания и тока двигателя, как без нагрузки, так и при работе под нагрузкой.Это зависит от h , и при увеличении выходное напряжение также увеличивается.
Как упоминалось ранее, сопротивление якоря будет изменяться в зависимости от температуры, что приводит к разбалансировке моста и влиянию на выход В об / мин . Чтобы свести к минимуму этот эффект, мост следует настраивать, когда двигатель находится при рабочей температуре.
Этот метод стабилизации скорости был популярным решением для контроллеров скорости вращения ротора регулятора, используемых в магнитофонах, использующих аналоговую электронику.В эпоху магнитофонов многие компании производили микросхемы для управления двигателем постоянного тока, чтобы лента двигалась с постоянной скоростью. Это было интересное решение, потому что оно работало линейно и не создавало шума, как контроллеры на основе ШИМ.
Общие микросхемывключают LA5586, TDA7274, BA6220 и AN6550. К сожалению, производство большинства из них было снято с производства, и теперь их можно приобрести только на вторичном рынке. Схемы в микросхемах немного отличались, но принцип работы по-прежнему основан на мостовой схеме, описанной выше.
LA5586 Эквивалентная схема контроллера скорости двигателя и прикладная схемаОбратите внимание, что эквивалентная схема нарисована с источниками тока и постоянным коэффициентом тока. Коэффициент текущей ликвидности составляет от 20 до 40, в зависимости от конкретной ИС, и обозначен как K . В интегральных схемах легко сделать два источника тока с одинаковыми температурными параметрами.
Двигатель подключен к одной ветви моста, а вторая ветвь содержит резистор со значением K, в раз превышающим внутреннее сопротивление двигателя.
Цепь установившегося состояния для контроллера двигателяВ установившемся режиме ток двигателя в K в раз больше, чем ток через Rt . Отрицательный вход операционного усилителя подключен к источнику напряжения, поэтому падение напряжения на резисторе Rt всегда будет ниже, чем напряжение двигателя. Разница составит Vref . Напряжение в точке A (относительно земли) всегда будет выше, чем напряжение в точке B .
Без Rs , ток через Rt в 40 раз меньше тока двигателя. Когда нагрузка двигателя увеличивается, напряжение в точке B увеличивается, а также увеличивается выходное напряжение усилителя. Более высокое напряжение усилителя вызывает более высокий ток двигателя, что увеличивает крутящий момент двигателя. Регулировка скорости может быть достигнута путем добавления шунтирующего резистора — напряжение между точками A и B всегда равно опорному напряжению, поэтому легко контролировать дополнительный ток, добавленный к Rt .
Эта схема будет сбалансирована, когда напряжение двигателя равно сумме напряжений на Rt и Rs ( Vref ). Уравнение установившегося состояния: 𝐼𝑚 × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇 × 𝐼𝑠 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Отсюда уравнение для обратной ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + (1 + 1𝐾) × 𝑅𝑇 × 𝐼𝑠 + 𝑅𝑇𝐾 – 𝑅𝑚 × 𝐼𝑚
Предполагая: 𝐾 × 𝑅𝑚 = 𝑅𝑇
, то количество оборотов, определяемое Vbemf , составляет: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅𝑇 × (1 + 1𝐾) × 𝐼𝑠
Важно, чтобы во всех случаях Rt было меньше, чем K x Rm , иначе цепь будет чрезмерно компенсированной и нестабильной.
Аналоговый регулятор скорости с отрицательным сопротивлением
Увеличение нагрузки на двигатель приводит к увеличению потребляемого тока и падению скорости. Также уменьшается обратная ЭДС и напряжение на двигателе, этот метод управления известен как регулятор отрицательного вывода.
В этом случае мы используем операционный усилитель для управления скоростью, поэтому наша R_load будет на тысячи больше, чем другое сопротивление в этой цепи, и снова может быть опущена.
Из предыдущего раздела мы знаем, что напряжение источника питания не изменилось В об / мин , что позволяет нам запитать нашу схему от мощного операционного усилителя или добавить транзистор к выходу стандартного операционного усилителя. .Подключив инвертирующий вход к ножке моста между двигателем и последовательным резистором, мы можем управлять источником питания моста с помощью напряжения, подключенного к неинвертирующему выходу.
Цепь управления напряжением двигателяВходное напряжение подается на неинвертирующий вход операционного усилителя, а инвертирующий вход подключается непосредственно к клемме двигателя. Мы пока не можем контролировать скорость с помощью схемы, в связи с чем наш усилитель работает как буфер (или повторитель напряжения) с коэффициентом усиления равным 1.По сути, входное напряжение определяет напряжение двигателя.
Можно изменить скорость двигателя, установив напряжение Vin, но это не поддерживает постоянную скорость при изменении нагрузки. При постоянном входном напряжении двигатель будет вращаться быстрее при малых нагрузках и медленнее при увеличении нагрузки. Нам нужно еще несколько компонентов для стабилизации скорости двигателя.
Падение напряжения на Rs пропорционально падению напряжения на сопротивлении якоря двигателя, мы будем использовать это напряжение для компенсации падения напряжения на сопротивлении якоря.Это можно сделать, добавив модификацию схемы к приведенной ниже — добавив R1 и R2 и подключив их среднюю точку к неинвертирующему входу операционного усилителя.
Цепь регулятора скорости двигателяСоотношение R1 и R2 должно быть таким же, как Rs и Ra , чтобы обеспечить стабилизацию скорости. На изображении выше показана полная схема и ее эквивалент для руководства, управляющее напряжение должно быть таким же, как напряжение обратной ЭДС при желаемой скорости.
Коэффициент компенсации определяется значением Rs , но удобнее использовать стандартное значение сопротивления, а затем изменить R1 или R2 соответственно.
Если скорость двигателя уменьшается при приложении нагрузки, следует увеличить значение R2 (или уменьшить R1 ). Если скорость двигателя начинает колебаться (или имеет тенденцию к увеличению) при приложении нагрузки, следует уменьшить R2 или ( R1 следует увеличить).
Чтобы спроектировать эту схему, нам нужно знать, какое значение обратной ЭДС на желаемой скорости:
- Чтобы найти напряжение обратной ЭДС на желаемой скорости, вал двигателя может быть установлен на бурильщик и приведен в движение. После достижения желаемой скорости (проверенной тахометром) измерьте напряжение на клеммах двигателя с помощью высокоомного вольтметра.
- Измерить внутреннее сопротивление обмотки с помощью омметра на клеммах двигателя. Хорошо взять среднее значение из нескольких различных измерений положения ротора.
- Выберите значение Rs из стандартных значений, оно может быть меньше сопротивления двигателя.
- Выберите R1 и R2 , чтобы соотношение было таким же, как соотношение между Rs и Ra . Фактические значения резистора должны быть больше Rs и Ra для экономии тока. Поскольку эквивалентное сопротивление плеч моста будет другим, операционный усилитель должен быть с низким входным током.
- Подайте управляющее напряжение, равное желаемой обратной ЭДС.
- Проверить скорость и соответствующим образом компенсировать (указано в абзаце перед этим списком).
Для температурной компенсации можно выбрать Rs с тем же температурным коэффициентом, что и обмотки двигателя — для меди это 3400 частей на миллион. Этот резистор следует размещать как можно ближе к двигателю, чтобы поддерживать тот же температурный режим.
Простая схема стабилизации скорости двигателя также может быть выполнена только на транзисторах:
Транзисторный регулятор скоростиВ этой схеме T2 работает как выходной каскад, а T1 как усилитель ошибки.Сигнал на коллекторе T1 является выходным сигналом, эмиттер работает как инвертирующий вход, а база как неинвертирующий вход.
Сигнал напряжения на двигателе подключен к неинвертирующему входу, потому что выходной каскад инвертирует этот сигнал, что означает, что больший сигнал на коллекторе вызывает меньший ток двигателя.
Диоды D1 и D2 создают опорное напряжение, напряжение на эмиттере T1 всегда ниже, чем напряжение на выводах двигателя.Напряжение компенсации берется из R3 и вычитается из напряжения питания моста, которое измеряется делителем напряжения R4 , R5 и R1 .
R7 и C2 — это схема запуска, помогающая преодолеть статическое трение, а C1 — конденсатор с частотной компенсацией, предотвращающий высокочастотные колебания.
Поскольку нам необходимо точное измерение обратной ЭДС, которое зависит от контактного сопротивления между коммутатором и щетками, лучше всего использовать двигатели с металлическими щетками.Большинство двигателей Precision Microdrive имеют металлические щетки и подходят для этого метода управления скоростью.
Регулятор скорости со специализированным IC
Эта схема основана на AN6651, специализированном контроллере двигателя, который ранее был популярен в магнитофонах.
AN6651 работает по тому же принципу, что и описанный выше LA5586. Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
AN6651 работает по тому же принципу, что и описанный выше LA5586.Контакты 2 и 4 являются выходами источника тока, соотношение между управляющим выходом (контакт 2) и выходом двигателя (контакт 4) составляет 40: 1.
Сопротивление R1 , подключенное между контактом 2 и источником питания, должно быть в 40 раз больше внутреннего сопротивления двигателя для того же падения напряжения на R1 , что и на внутреннем сопротивлении двигателя: 𝐾 = 40𝑅1 = 𝐾 × 𝑅𝑚
Например, используя стандартное значение 390 Ом для R1 (меньшее значение снижает склонность к возникновению колебаний), нам нужно найти значения для последовательного соединения R2 и R3.Давайте возьмем двигатель постоянного тока 132-100 и установим целевую скорость 2400 об / мин. Для начала нам нужны некоторые технические детали:
- Сопротивление двигателя, = 10 Ом
- Входное напряжение без нагрузки при скорости 2400 об / мин, 𝑉𝑚 = 3,87𝑉
- Ток без нагрузки при скорости 2400 об / мин, 𝐼𝑚 = 23𝑚𝐴
Мы можем рассчитать падение напряжения на внутреннее сопротивление как: 23𝑚𝐴 × 10Ω = 0,23𝑉
, и мы также можем рассчитать Vbemf как: 3,87𝑉 − 0,23𝑉 = 3,65𝑉
В установившемся режиме, когда цепь сбалансирована, уравнение цепи имеет следующий вид: × 𝑅𝑚 + 𝑉𝑏𝑒𝑚𝑓 = 𝑅1 × (𝐼𝑅2𝑅3 + 𝐼𝑅2𝑅3 + 𝐼𝑚𝐾 + 𝑉𝑟𝑒𝑓
Из этого уравнения мы можем вычислить обратную ЭДС: 𝑉𝑏𝑒𝑚𝑓 = 𝑉𝑟𝑒𝑓 + 𝑅1 × (1 + 140) × 2𝑅3
Как мы знаем из даташита Vref = 1V, поэтому: 𝐼𝑅2𝑅3 = 𝑉𝑏𝑒𝑚𝑓 – 𝑉𝑟𝑒𝑓𝑅1 × (1 + 140)
Для нашего мотора имеем: 𝐼𝑅2𝑅3 = 3.64–1390 × (1 + 140) 𝐼𝑅2𝑅3 = 0,0051𝐴 = 5,1𝑚𝐴
С помощью этого значения мы можем вычислить последовательное сопротивление R2 и R3 : 𝐼𝑅2𝑅3 = 𝑉𝑟𝑒𝑓𝑅2 + 𝑅3𝑅2 + 𝑅3 = 𝑉𝑟𝑒𝑓𝐼𝑅2𝑅3𝑅2 + 𝑅3 = 195 Ом
Мы можем использовать постоянный стандартный резистор 150 Ом плюс потенциометр 100 Ом, что дает нам диапазон для точной настройки. Расчетные значения являются приблизительными, в реальной цепи ток внутреннего источника опорного напряжения также имеет значение (между 0,8 — 2 мА для AN6651), это вызовет изменение тока двигателя.
Добавление потенциометра позволяет установке регулировать скорость и должна быть откалибрована через некоторое время, чтобы двигатель прогрелся до рабочей температуры, чтобы минимизировать результирующий сдвиг сопротивления.
132-100 и AN6651 Цепь регулятора скоростиПрецизионные микроприводы 132-100 PCB с AN6651
Прецизионные микроприводы 132-100 PCB с AN6651
Регулятор скорости с дискретным операционным усилителем
Это улучшенная версия схемы операционного усилителя, описанной выше, с использованием специальной ИС.Основное улучшение — это работа при низком напряжении, благодаря использованию опорного сигнала с малой шириной запрещенной зоны. Использование этого дискретного компонента минимизирует размер схемы, что идеально подходит для современных небольших корпусов.
В этой схеме компенсационное напряжение берется с последовательного резистора R8 , значение которого меньше внутреннего сопротивления двигателя для уменьшения потерь мощности. Вторая опора моста состоит из R6 и R7 . Соотношение этих резисторов должно быть таким же, как R8 и сопротивление обмотки двигателя.В качестве типичного значения можно выбрать R8 , тогда для компенсации внутреннего падения напряжения следует выбрать R6 и R7 . Для стабильной работы коэффициент R7 / R6 должен быть больше Rm / R8 .
Эта схема должна подходить для небольших двигателей с номинальным напряжением 1 В ~ 2 В.
Цепьна базе ОУ стабилизации скорости двигателя
Регулятор скорости на транзисторах
Эта недорогая схема построена на транзисторах для управления скоростью двигателя, хотя она не обеспечивает такой же точности, как операционный усилитель, ее можно сделать очень маленькой и полезной для недорогих приложений.
В этой схеме опорное напряжение составляет 1,2 В, и D1 работает как опорное напряжение. Обратная ЭДС двигателя больше опорного напряжения — в зависимости от R2 , R3 и R4 делитель напряжения :
- Во-первых, нам нужно установить коэффициент делителя напряжения, наше опорное напряжение составляет 1,2 В, а когда желаемая обратная ЭДС составляет 3,6 В, делитель напряжения R2 , R3 и R4 должен иметь коэффициент: 3.61,2 = 3
- Итак, у нас есть максимальный диапазон для точной настройки схемы, это нужно делать, когда потенциометр ( R3 ) находится в среднем положении. Теперь нам нужно разделить оставшееся значение между каждым из других резисторов.
- Когда мы знаем наш коэффициент делителя напряжения, выбрать R6 и R8 легко. Нам нужно иметь такое же соотношение между делителем напряжения R6 и , R8 и внутренним сопротивлением двигателя.
Этот контур разработан для одной постоянной скорости, и изменение скорости с помощью триммера влияет на компенсацию скорости.Таким образом, триммер следует использовать только для настройки этой схемы в диапазонах очень низких скоростей. Чтобы использовать эту схему с широким диапазоном настройки скорости, нам необходимо внести некоторые изменения:
Двухтранзисторный регулятор скорости двигателяТрехтранзисторный регулятор скорости двигателя
Эта схема работает по тем же правилам, что и предыдущая версия с двумя транзисторами, но основным улучшением является увеличение коэффициента усиления для опорного напряжения транзистором Q2 . Это позволяет нам использовать источник опорного напряжения с малой шириной запрещенной зоны, который более стабилен, чем стандартные диоды.Еще одним улучшением по сравнению с добавлением Q2 является температурная компенсация Vbe между транзисторами Q1 и Q2 .
Расчет этой схемы начинается с задания напряжения обратной ЭДС. В этой схеме опорное напряжение равно LM385 — 2,5 В и напряжение Vbe из Q2 : 𝑉𝑟𝑒𝑓 = 𝑉𝑏𝑔𝑟𝑒𝑓 + 𝑉𝑏𝑒 = 1,2𝑉 + 0,7𝑉 = 1,9𝑉
.Если нам нужно, чтобы Vbemf было 3,8 В, коэффициент делителя напряжения R2 , R4 и R3 должен быть 2: 1.Потенциометр ( R3 ) предназначен для точной настройки этого напряжения, но в этой схеме изменение скорости с помощью триммера вызовет изменение компенсации. Таким образом, R3 предназначен только для окончательной настройки скорости в небольшом диапазоне, скажем, 5% или меньше, и должен использоваться только для компенсации допуска других значений компонентов.
После установки этого делителя напряжения выбрать значение R6 и R7 легко, когда мы знаем внутреннее сопротивление двигателя. Эквивалентное параллельное соединение R6 , R7 и сопротивление двигателя должны иметь такое же соотношение, как R2 , R3 и R4 делителя напряжения (с потенциометром R3 , установленным в среднее положение).
Прецизионные микроприводы Трехтранзисторный контроллер скорости двигателяПрецизионные микроприводы Трехтранзисторный контроллер скорости двигателя
Режим переключения аналоговый регулятор скорости
В этой статье описывается простая реализация аналогового регулятора скорости двигателя, основанная на измерении обратной ЭДС и управляющем сигнале ШИМ.
При использовании ШИМ с двигателем постоянного тока все еще можно управлять скоростью двигателя без каких-либо датчиков. Используя типичный недорогой драйвер с одним полевым МОП-транзистором, можно измерить обратную ЭДС, когда двигатель вращается, а транзистор выключен.
Управление частотой вращения двигателя с использованием обратной ЭДС в режиме переключения аналоговой схемыЭтот контроллер состоит из ШИМ-модулятора, выходного транзистора и схемы «выборки и удержания» (иногда известной как схемы «слежения и удержания»). Модулятор PWM имеет управляющий вход, который позволяет изменять рабочий цикл. Если вы не знакомы, это может показаться сложным, но общая идея довольно проста:
- , когда транзистор включен, напряжение питания подключено к клеммам двигателя, ток двигателя Im протекает через двигатель, заставляя его ускоряться
- , когда транзистор выключен, двигатель действует как генератор, а Вм равно к Vbemf , который пропорционален скорости двигателя.Срабатывает схема выборки и удержания, которая сохраняет выборку Vbemf в конденсаторе
Узел суммирования затем вычисляет разницу между желаемой скоростью и текущей скоростью, поскольку обе представлены напряжением (желаемое напряжение и Vbemf соответственно). Это напряжение ошибки используется для управления скоростью двигателя путем увеличения или уменьшения рабочего цикла модулятора ШИМ.
Из-за индуктивного характера двигателей постоянного тока измерение обратной ЭДС невозможно сразу после выключения транзистора.Когда транзистор переключается, генерируется сильный индуктивный всплеск, и через реверсивный диод протекает индуктивный рециркуляционный ток Ir . Необходима небольшая задержка, пока напряжение обратной ЭДС не станет стабильным:
Измерение сигнала ШИМ на клеммах двигателяЭтот метод управления может быть выполнен с использованием только аналоговых компонентов или с помощью цифрового микроконтроллера. Практическая реализация контроллера, основанного на этом методе и использующего двигатель постоянного тока 132-100, показана ниже:
Регулятор скорости двигателя на основе измерения обратной ЭДС и выхода ШИМВ этой схеме напряжение на R2 представляет желаемую скорость, IC1A работает как усилитель ошибки и ПИД-регулятор.
Схема ШИМ-модулятора построена на IC1B и IC2 , где IC1B работает как генератор треугольных волн с частотой, определяемой R12 и C4 .
IC2 действует как компаратор, который сравнивает напряжение треугольного сигнала с выхода IC2 с установочным напряжением от потенциометра R15 . Когда напряжение сигнала треугольника ниже, чем напряжение от R15 , выход компаратора высокий, и двигатель запитан.
Цепь выборки и хранения состоит из C3 , R10 , D2 , Q1 , R13 . Когда двигатель запитан от T1 , Q2 включен, а узел R13 и D2 замкнут на землю, что не позволяет ему сделать выборку, когда на двигатель подается напряжение Vcc. Диод D2 предотвращает разряд C3 при включенном Q1 .
Когда T1 выключен, Q2 также выключен, и Vbemf может заряжать конденсатор C3 .Напряжение на C3 находится на неинвертирующем входе усилителя ошибки, IC1A . Этот усилитель вычитает текущее напряжение скорости из желаемого напряжения скорости (устанавливается потенциометром R2 ). При увеличении обратной ЭДС выходное напряжение на IC1A также увеличивается — это смещает уровень сигнала треугольника вверх пропорционально ошибке скорости. Если уровень сигнала треугольника увеличивается, то время, когда выходной транзистор включен, уменьшается, и коэффициент заполнения ШИМ также уменьшается.
Этот усилитель ошибки работает как схема ПИД-регулирования, где коэффициент усиления определяется как 5𝑅5 + 10, а постоянная времени определяется параметрами R5 и C2 .
Схема выборки и хранения очень проста, потому что время выборки равно состоянию выключения в рабочем цикле ШИМ, поэтому напряжение выборки напрямую зависит от рабочего цикла. Кроме того, это менее важно, если схема используется для управления приложением, которое не использует полный диапазон скорости двигателя.Его также можно уменьшить по выбору, изменив значения R10 , C3 и R13 , которые позволяют изменить время заряда / разряда C3 .
Диапазон изменения рабочего цикла ШИМ (от приложенного напряжения ошибки) определяется соотношением от R7 до R8 || R9 , однако, поскольку схема Sample & Hold настолько проста, этот диапазон не должен быть очень широким.
Эта схема предназначена для работы в малом диапазоне ШИМ, максимальная нагрузка ШИМ снижается за счет задержки индуктивной нагрузки двигателя, и с ограничением схемы выборки и удержания этот метод не следует использовать для широкого диапазона частот. диапазон регулирования скорости.
Это демонстрирует принцип работы, поэтому для практического использования настоятельно рекомендуется улучшить простую схему выборки и хранения. Например, схема на основе недорогого LF398 может обеспечить время выборки 10 мкс.
По сравнению с аналоговой схемой отрицательной обратной связи этот метод:
- снижает потери мощности
- может быть более стабильным, так как температура не влияет на напряжение обратной ЭДС (за счет изменения сопротивления обмотки)
Однако это также:
- не подходит для двигателей с высокой индуктивностью
- имеет узкий диапазон регулирования скорости
- имеет склонность к колебаниям
Информационный бюллетень
Подпишитесь, чтобы получать новые блоги, тематические исследования и ресурсы — прямо на ваш почтовый ящик.
Подробнее
Ресурсы и руководства
Ознакомьтесь с замечаниями по применению наших продуктов, руководствами по дизайну, новостями и тематическими исследованиями.
Примеры из практики
Изучите нашу коллекцию тематических исследований, примеры нашей продукции в различных областях применения.
Прецизионные микроприводы
Нужен ли вам компонент двигателя или полностью проверенный и протестированный сложный механизм — мы всегда готовы помочь. Узнайте больше о нашей компании.
Подано в: С тегами:. Собственное падение кривой скоростных характеристик крутящего момента постоянного магнита. чистый двигатель можно в значительной степени преодолеть с помощью механизма обратной связи, такого как то, что изображено на схематической диаграмме фиг. 6 (эта схема также применима шунтировать двигатели, в этом случае, вероятно, было бы предпочтительнее возбуждать поле от источника постоянного тока).Улучшение, достигаемое с помощью этого методика показана на кривых на фиг. 7. Уместно отметить, что нисходящие наклоны кривых на фиг. 7А был бы еще круче, если бы реостатный использовался контроль тока якоря. Это система включения-выключения, в которой рабочий ток разделен к якорю двигателя таким образом, чтобы поддерживать почти постоянную скорость. Он похож на широтно-импульсную модуляцию, но обычно не используется. так обозначено, потому что и время включения, и ток различаются.Он разделяет однако характерная особенность широтно-импульсной модуляции в этом двигателе ток либо включен, либо выключен — нет рассеивания мощности от промежуточных текущие значения как при реостатическом контроле. Среднее значение арматуры ток — это контролируемый параметр, и он является функцией среднего рабочий цикл. РИС. 7. Характеристики регулирования скорости двигателя постоянного тока с постоянными магнитами.A. «Естественные» характеристики при питании двигателя от разветвленной аккумуляторной батареи. или стабилизированный источник питания по напряжению. Б. Скоростно-крутящие характеристики когда один и тот же двигатель управляется схемой обратной связи на фиг. 6. Обнаруживаемый параметр — это не скорость двигателя, а напряжение. падение на переход база-эмиттер силового транзистора Q5. Эта величина T зависит от тока двигателя. Например, если увеличился к двигателю приложена механическая нагрузка, она имеет тенденцию замедляться и уменьшаться его противо-ЭДС, так что он может потреблять больше тока, создающего крутящий момент.Падение напряжения V_BE в Q5 становится больше из-за более высокого коллектора. Текущий. Чувствительный транзистор — Q6, и напряжение постоянного тока, которое представляет скорость двигателя развивается в точке «А». Это напряжение подается на вход схемы триггера Шмитта, включающий транзисторы Q 1 и Q2. Напряжение «сравнения», полученное от регулятора регулировки скорости, R1, также применяется к этому входу. Состояние проводимости транзистора Q2 поэтому определяется чистым постоянным напряжением, измеренным базой входного сигнала. транзистор Q1.Транзистор Q3 представляет собой простой каскад усилителя постоянного тока для большего эффективное срабатывание управляющего транзистора Q4. Транзистор Q5 является силовым выходом. каскад, который фактически «измеряет» ток якоря двигателя. Финал Существенным элементом является безынерционный диод D3. Этот диод обеспечивает путь для тока якоря во время интервалов, когда транзистор Q5 находится в его выключенное состояние. Источником этого тока является энергия, запасенная в магнитное поле двигателя. Благодаря этому достигается более постоянный крутящий момент. текущий путь через D3.Без D3 эта накопленная энергия будет проявляться это само как разрушительный всплеск напряжения. Исходя из вышеизложенного, принцип действия этого регулятора скорости схему теперь можно понять. Как уже указывалось, увеличенный мотор нагрузка приводит к более высокому напряжению база-эмиттер, V_BE, на выходной мощности транзистор Q5. Это напряжение измеряется каскадом обратной связи Q6, и создается постоянное напряжение, пропорциональное среднему V_BE в Q5. через конденсатор C4.Когда таким образом на конденсаторе создается более высокое напряжение C4, он заставляет входной каскад Q1 триггера Шмитта сокращать его проводимость. интервалы. В результате увеличилось время для этапа Q2 и для всех последующие этапы через Q5, вызывает более высокий средний ток. к якорю двигателя, тем самым восстанавливая большую часть истощенной скорости. Противоположные реакции происходят при ослаблении нагрузки на двигатель. Небольшое размышление показывает, что схема на фиг.6 включает в себя положительные обратная связь (увеличение тока якоря вызывает дальнейшее увеличение). Однако фактора обратной связи недостаточно, чтобы вызвать нестабильность. Сам двигатель имеет тенденцию препятствовать кумулятивному накоплению либо «Зависание» или колебательное состояние может быть причиной каждого приращения дополнительного ток производит повышенную скорость, счетчик ЭДС увеличивается, тем самым подавление развития убегающего тока. Делитель напряжения триггера Шмитта, состоящий из R5, R8, R9 и R11, подключается через 12-вольтовый источник питания.Из-за этого, если напряжение от источника питания станет выше, транзистор Q2 будет смещен на на более короткое время, тем самым предотвращая увеличение среднего тока от доставки к мотору. Хотя это компенсирующее действие не идеален, это снижает зависимость скорости двигателя от напряжения питания. чем было бы в противном случае. Из-за различных характеристик двигателей и больших допусков в параметров транзистора, оптимальное значение сопротивления R15, как правило, будет требуют определения методом проб и ошибок. |
Типы контроллеров двигателей и приводов
Контроллеры и приводы двигателей — это электрические или электронные устройства, которые регулируют скорость двигателя, крутящий момент и выходы положения. Привод изменяет мощность, подаваемую на двигатель, для достижения желаемой мощности. Схемы контроллера обычно интегрируются со схемами привода как один автономный блок, поэтому термины «привод двигателя» и «контроллер двигателя» часто используются как взаимозаменяемые.Существует четыре основных типа контроллера двигателя и приводов: переменного, постоянного тока, сервопривода и шагового, каждый из которых имеет тип входной мощности, измененный в соответствии с желаемой выходной функцией в соответствии с приложением.
Слева направо: серводвигатель переменного тока, бесщеточный двигатель постоянного тока и шаговый двигатель.Изображение предоставлено: similis / Shutterstock.com
Видео
Контроллер двигателя и типы приводов
AC
Контроллеры и приводы двигателей переменного тока— это электронные устройства, которые изменяют входную мощность двигателей, обычно регулируя частоту мощности двигателя с целью регулирования выходной скорости и крутящего момента.Основные характеристики включают предполагаемое применение, режим работы привода, тип двигателя, тип инвертора, классификацию напряжения системы контура, номинальную мощность, интерфейс связи, а также электрические характеристики входа и выхода.
Контроллеры и приводы двигателей переменного токаиспользуются в основном в технологических процессах для управления скоростью насосов, вентиляторов, нагнетателей и т. Д. Они известны как приводы с регулируемой скоростью, преобразователи частоты или инверторы переменного тока. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.
постоянного тока
Контроллеры и приводы двигателей постоянного тока— это электрические устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный выход постоянного тока с изменяющейся длительностью или частотой импульса. Основные характеристики включают предполагаемое применение, режим работы привода, тип двигателя, систему контура, классификацию напряжения, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики входа и выхода. Контроллеры и приводы двигателей постоянного тока используются в основном для управления скоростью и крутящим моментом двигателей для станков, электромобилей, насосов и т. Д.Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.
Серводвигатель
Контроллеры и приводы серводвигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный токовый выход с изменяющейся длительностью или частотой импульса. Основные характеристики включают предполагаемое применение, тип двигателя, режим работы привода, систему контура, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики.Контроллеры и приводы серводвигателей используются, в основном, в приложениях управления движением в производственных и строительных средах, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателей, и могут работать как на переменном, так и на постоянном токе. Серводвигатели используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или системы привода шпинделя. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод.Сервоприводы также известны как усилители серводвигателей.
Шаговый
Контроллеры и приводы шаговых двигателей— это электронные устройства, которые изменяют входную мощность, настраивая источник постоянного или переменного тока на импульсный или «ступенчатый» выходной ток.
Основные характеристики включают предполагаемое применение, тип двигателя, режим работы привода, систему контура, номинальную мощность, тип выходного сигнала, интерфейс связи, а также электрические характеристики.
Контроллеры и приводы шаговых двигателейиспользуются в основном в приложениях управления движением в производственных и строительных средах, среди прочего, и используются для управления скоростью, крутящим моментом и положением двигателя.Они используются во многих приложениях, включая станки, микропозиционирование и робототехнику, а также многие другие типы оборудования, такие как конвейеры или OEM-оборудование. Контроллер, обычно интегрированный со схемами привода, подает управляющие сигналы на привод. Шаговые приводы также известны как импульсные приводы и шаговые усилители. Контроллеры шагового двигателя также известны как индексаторы двигателей.
Контроллеры двигателей и приводы — Области применения и отрасли
В отличие от серводвигателей и шаговых двигателей, для большинства двигателей переменного и постоянного тока не требуются контроллеры или приводы, кроме простейших пускателей двигателей и аналогичных защитных устройств.Приводы электродвигателей переменного тока используются, когда желательно регулирование скорости электродвигателя переменного тока, поскольку управление скоростью в асинхронном электродвигателе переменного тока обычно не выполняется — после того, как электродвигатель указан (по количеству полюсов), рабочая скорость указывается на паспортной табличке. С другой стороны, щеточные двигатели постоянного тока, в основном, регулируются по скорости, просто изменяя напряжение, подаваемое на ротор двигателя и поле. Это можно сделать с помощью простого реостата; ни контроллер, ни привод не нужны. Новые бесщеточные двигатели постоянного тока не имеют механической коммутации и, следовательно, требуют контроллеров и приводов для электронной коммутации магнитного поля.Серводвигатели и шаговые двигатели, поскольку они представляют собой устройства позиционирования, в отличие от машин вращательного движения, также требуют контроллеров и драйверов для их работы.
Приводы двигателей переменного токаиспользуются для управления скоростью двигателей, приводящих в действие насосы, вентиляторы и т. Д., Где в противном случае можно было бы использовать традиционные клапаны или заслонки для регулирования потока. Электроприводы переменного тока используются для повышения эффективности за счет настройки скорости насоса, вентилятора и т. Д. В точном соответствии с требованиями.
Приводы двигателей постоянного токаиспользуются для управления двигателями постоянного тока с постоянными магнитами, работающими от источников переменного тока.Двигатели постоянного тока обладают очень хорошим крутящим моментом на низкой скорости, что делает их особенно подходящими для лебедок, кранов и т. Д., Где необходимо поднимать грузы без «пуска с хода». До появления электронных систем управления постоянным током мы часто использовали электродвигатели постоянного тока в качестве электродвигателей-генераторов для выработки постоянного тока через асинхронные электродвигатели переменного тока.
Контроллеры и приводы серводвигателейполагаются на обратную связь от серводвигателей для управления положением, скоростью, ускорением и т. Д. Производители серводвигателей обычно поставляют приводы, которые работают с их двигателями.Хотя для степперов не требуется петля обратной связи, некоторые ее используют. Производители шаговых двигателей также обычно поставляют приводы для своих двигателей. Большинство производителей серводвигателей и шаговых двигателей предоставляют диаграммы в качестве указаний, какие двигатели будут работать с какими приводами.
Соображения
Выбор контроллеров двигателей и приводов начинается с знания типа двигателя. Соответствующие подкатегории затем согласовываются с этой базовой информацией.
Решение об использовании приводов переменного тока для асинхронных двигателей часто является экономическим решением, основанным на рабочих характеристиках конкретной установки: как часто насос или вентилятор работает с дроссельными клапанами или решетчатыми воздуховодами.По крайней мере, один производитель предлагает калькулятор (см. Ниже) для определения экономии энергии приводов переменного тока на основе конкретных сценариев эксплуатации. Двигатели, предназначенные для использования с приводами с регулируемой скоростью, обычно рассчитаны на работу с инвертором.
Еще одно соображение для приводов переменного тока — это характер применения, в котором постоянный крутящий момент и переменный крутящий момент являются основными разделами. Для применений с переменным крутящим моментом, таких как центробежные вентиляторы, требования к крутящему моменту зависят от скорости двигателя. Для приложений с постоянным крутящим моментом, таких как конвейеры, требования к крутящему моменту одинаковы независимо от скорости двигателя.Приводы переменного тока обычно предназначены для работы с переменной или постоянной скоростью.
Щеточные двигатели постоянного тока, работающие от переменного тока, обычно приводятся в действие с помощью тиристорных мостовых выпрямителей, которые позволяют переменному току течь к двигателю только в одном направлении, копируя источник питания постоянного тока. Более подробную информацию можно найти в приведенных ниже ссылках. Такие поставщики, как Baldor, предоставляют устройства управления постоянным током для односторонних и рекуперативных приложений для двигателей постоянного тока мощностью до 5 лошадиных сил, а через свою материнскую компанию (ABB) предлагает приводы постоянного тока мощностью до 3000 л.с.Для односторонних приводов обычно требуется тормоз для остановки двигателя, в то время как рекуперативные приводы могут вращать двигатель в любом направлении и, таким образом, обеспечивать тормозное усилие за счет реверсирования. Генерируемая мощность обычно отводится через реверсивные резисторы.
Электродвигатели постоянного тока, работающие от систем постоянного тока, такие как электрические домкраты для поддонов, также используют средства управления для изменения скорости и направления. Для бесщеточных двигателей постоянного тока или двигателей с постоянным магнитом также требуются контроллеры для электронной коммутации их магнитных полей.
Серводвигателимогут быть переменного или постоянного тока, с постоянным током, как щеточного, так и бесщеточного типов. Во всех случаях они требуют контроля, потому что они являются устройствами обратной связи. Линейные двигатели обычно основаны на сервоприводах и также требуют управления.
Шаговые двигатели, как правило, не требуют обратной связи, но должны быть «настроены» при включении, чтобы двигатель знал, где он находится. Отсюда он считает шаги, чтобы отслеживать позицию. Некоторые шаговые двигатели подключают свои приводы непосредственно к раме двигателя.
Важные атрибуты
Полупроводниковый прибор
Вообще говоря, IGBT и SCR используются для устройств среднего и высокого напряжения, в то время как MOSFET используются в приложениях с низким энергопотреблением.
Входная фаза двигателя
Двигатели, как правило, являются одно- или трехфазными машинами, в зависимости от фазы переменного тока, который их питает. Шаговые двигатели являются исключением в этом отношении, поскольку фаза относится к архитектуре самого шагового двигателя, обычно описываемого как двух- или пятифазный.У Oriental Motors есть хорошая статья, в которой обсуждается разница, цитируемая ниже.
Корпуса
Электрические шкафы определены в соответствии с критериями NEMA или IEC по защите окружающей среды и проникновению.
Режим работы привода
Как обсуждалось выше, приводы переменного тока обычно проектируются как с постоянным, так и с переменным крутящим моментом в зависимости от области применения.
Ресурсы
Категории связанных продуктов
Прочие изделия из двигателей
Прочие «виды» статей
Больше от Instruments & Controls
Контроль крутящего момента и скорости двигателя
Предыдущий «Типы приводов с регулируемой скоростью» • Вернуться к указателю • Следующий «Несколько приводов — координированное управление»
Управление двигателем крутящий момент и скорость или скорость — это выбор рабочего режима, доступный для большинства основных приводов постоянного тока и некоторых приводов переменного тока типа vector .Для некоторых продуктов Режим скорости может включать мощность для регенерации .
1.) Приводы постоянного тока — Контроль крутящего момента:
Для управления крутящим моментом двигателей постоянного тока привод постоянного тока регулирует ток якоря.
Напряжение якоря не регулируется, что позволяет двигателю работать с любой скоростью, необходимой для достижения заданного уровня тока / крутящего момента. Такая установка может использоваться для любых приводных валков с постоянным крутящим моментом и простых намоточных устройств для регулировки приблизительного натяжения для работы с центральным ветром с малым коэффициентом усиления.Для центральных намоточных устройств с режимом крутящего момента и фиксированного входного задания крутящий момент остается постоянным, создавая эффект натяжения конуса, если оператор станка не увеличивает заданное значение крутящего момента по мере увеличения диаметра.
Прямое регулирование крутящего момента может иметь нежелательный эффект, вызывая разгон до максимальной скорости в случае поломки полотна или потери нагрузки, если в приводе не предусмотрена функция «Ограничение максимальной скорости или напряжения». Эти эффекты могут быть компенсированы дополнительным приводом. дополнительные платы и / или внешние схемы управления для обеспечения полнофункционального «центрального ветра с постоянным напряжением», CTCW, управления с включенной компенсацией трения, инерции, изменения диаметра и т. д.Некоторые приводы, такие как цифровой привод постоянного тока Carotron ELITE PRO, включают микропрограммное обеспечение CTCW.
ПРИМЕНИМЫЕ ТОВАРЫ:
СЕРИЯ СОБСТВЕННИКОВ
СЕРИЯ ADP100
ПИДЖАК СЕРИИ
ЭЛИТНАЯ СЕРИЯ
ВЫБОР СЕРИИ
СЕРИЯ ELITE PRO
RCP200 СЕРИИ
2.) Приводы переменного тока — Контроль крутящего момента:
Привод переменного тока использует комплексную обработку напряжения, тока, частоты и положения двигателя, чтобы обеспечить возможность регулирования крутящего момента.Для работы в режиме МОМЕНТ обычно требуется обратная связь от энкодера. Даже оценка способности инверторного привода регулировать крутящий момент — непростая задача. Не думайте, что инвертор и двигатель, работающие в режиме «крутящего момента», будут создавать линейный и пропорциональный выходной крутящий момент относительно задания. Полное управление крутящим моментом может зависеть от использования внешней схемы задания крутящего момента или управления, которое обладает гибкостью и возможностью регулировки для компенсации любых недостатков привода / двигателя.
3.) Приводы постоянного тока — Контроль скорости (скорости):
Для регулирования скорости двигателя постоянного тока привод обычно управляет напряжением якоря. Насколько хорошо это работает, зависит от того, какой сигнал обратной связи используется для представления скорости двигателя. См. Раздел C, «Управление по разомкнутому и замкнутому циклам». Общие варианты выбора для некоторых приводов постоянного тока следующие:
A. AFB — Обратная связь якоря
B. TFB — обратная связь с тахометра
C. EFB — обратная связь энкодера
А.) AFB — Обратная связь якоря
Метод обратной связи по напряжению якоря, также называемый обратной связью якоря, основан на способности двигателя постоянного тока действовать как генератор постоянного тока. Когда двигатель постоянного тока вращается, он генерирует уровень напряжения, называемый счетчиком или противоэдс , который пропорционален скорости вращения. Как и во всех «генераторах», на генерируемую мощность также влияет сила магнитного потока поля.
Поскольку напряжение якоря, поступающее от привода, выводится в виде импульсов, напряжение противо-ЭДС может быть измерено между импульсами.Затем этот сигнал подается в схему регулирования скорости привода, контур скорости, чтобы отрегулировать силовую часть привода для поддержания постоянного напряжения двигателя. Основное преимущество обратной связи якоря заключается в том, что (с приводами постоянного тока Carotron) не требуются дополнительные компоненты привода или двигателя.
Некоторые проблемы, связанные с работой обратной связи якоря, связаны с определенными характеристиками двигателя постоянного тока. Одна из проблем заключается в том, что даже при постоянном напряжении якоря скорость двигателя может упасть на несколько процентов, когда двигатель нагружен.Это падение происходит из-за потерь «внутреннего сопротивления» в якоре двигателя и устраняется в приводах постоянного тока путем добавления «компенсации внутреннего сопротивления», IR Comp, pot и сигнала.
Схема IR Comp определяет увеличение нагрузки, а затем увеличивает напряжение якоря, чтобы предотвратить падение скорости. К сожалению, влияние потерь IR обычно не одинаково в диапазоне скоростей двигателя, и конкретная настройка IR Comp лучше всего работает при определенной скорости двигателя.
Другая проблема с обратной связью якоря связана с работой двигателя в качестве «генератора» и с тем, как на нее влияет сила магнитного потока поля.В намотанном электромагнитном поле (ах) двигателей с шунтирующим полем повышение температуры по мере прогрева двигателя (сразу после включения питания) приведет к увеличению сопротивления обмотки возбуждения. Это вызывает уменьшение тока возбуждения и силы магнитного потока, что, в свою очередь, вызывает уменьшение генерируемого напряжения, которое при использовании в качестве обратной связи по скорости вызывает увеличение скорости двигателя, поскольку привод пытается поддерживать постоянную обратную связь по напряжению якоря.
Влияние напряженности шунтирующего поля на скорость и крутящий момент двигателя постоянного тока может быть использовано с пользой в некоторых приложениях, прежде всего известных как приложения « ПОСТОЯННАЯ МОЩНОСТЬ» .В этих приложениях скорость можно «поменять местами» на крутящий момент, чтобы обеспечить высокий крутящий момент при низкой скорости и высокую скорость при низком крутящем моменте. Velocity Mode Center Winder — это пример применения, в котором требуются низкий крутящий момент и высокая скорость на начальном валке и по мере увеличения диаметра; уменьшение скорости вращения сопровождается увеличением требований к крутящему моменту. В приложениях с более высокой мощностью, использующих специально разработанные двигатели, обычно> 5 л.с., управление полем двигателя постоянного тока может обеспечиваться приводом или независимым РЕГУЛЯТОРОМ ПОЛЯ.См. Раздел H. Подъемники постоянной мощности для более подробного описания этого типа работы.
ПРИМЕНИМЫЕ ТОВАРЫ:
УПРАВЛЕНИЕ ПОЛЕВЫМ РЕГУЛЯТОРОМ FR1000 и FR3500
СЕРИЯ ELITE PRO
Электродвигатели с постоянным магнитом, PM, полевые двигатели не испытывают явления «изменения магнитного потока», но все же могут проявлять ИК-потери. Таким образом, операция с обратной связью якоря менее затратна, но связанные с этим потенциальные проблемы могут быть недопустимыми, если требуется точное регулирование в диапазоне скоростей двигателя и работа без дрейфа.Способ устранения этих потенциальных проблем — «замкнуть контур скорости» с помощью внешнего устройства обратной связи, такого как тахометр или энкодер.
B.) TFB — обратная связь тахометра
Тахометры и энкодеры — это устройства, которые выдают точный выходной сигнал, пропорциональный их скорости вращения. Использование такого устройства для обратной связи называется «режимом обратной связи».
Тахометры(также известные как тахометры или тахогенераторы) различаются и рассчитаны на вольт-на-1000 об / мин.Большинство из них обеспечивают выход постоянного напряжения, но устройства с номинальным напряжением переменного тока все еще доступны и используются.
Некоторые стандартные номинальные значения постоянного тока: 7, 50 и 100 В постоянного тока / 1000 об / мин. Стандартные номиналы переменного тока — 45 и 90 В переменного тока / 1000 об / мин. Выходной сигнал тахометра переменного тока изменяет частоту и уровень напряжения с изменением скорости.
C.) EFB — обратная связь энкодера
Энкодерыбывают еще большего разнообразия номиналов и выдают сигнал, частота которого увеличивается с увеличением скорости.Они могут иметь несколько выходов, называемых квадратурными выходами и импульсами маркера, которые позволяют им передавать информацию о направлении вращения и положении вращения.
Некоторые энкодеры называются импульсными датчиками или генераторами импульсов. Обычно это механизмы «кольцо и шестерня» или «датчик Холла и магнитное колесо», которые устанавливаются на С-образную поверхность или фланец двигателя. Все энкодеры указаны в импульсах на оборот или PPR и могут иметь выходные характеристики от 1PPR до тысяч PPR.
Тахометры и энкодерывключают номиналы выходной точности или допусков, требований к источникам питания, температурного диапазона и диапазона нагрузки. Их главная претензия на славу заключается в том, что они игнорируют большинство внешних влияний и дают точные и повторяемые результаты, пока действуют в рамках установленных ими рейтингов. Это означает, что приводы, использующие их для обратной связи, также могут игнорировать или компенсировать такие факторы, как потери двигателя, колебания напряжения в сети, изменение нагрузки и изменение температуры.
ПРИМЕНИМЫЕ ТОВАРЫ:
TCF60 и TCF120 СЕРИИ ИМПУЛЬСНЫЕ ТАЧС
TAC008-000 XPY ФЛАНЦЕВЫЙ ЭНКОДЕР
TAC017-000 КВАДРАТУРНЫЙ КОЛЬЦО ЭНКОДЕР
4.) Приводы переменного тока — Контроль скорости (скорости):
Преобразователи частотыAC Inverter могут иметь несколько выбираемых методов управления. Вот несколько примеров:
A.) Управление V / F
B.) Управление напряжением / частотой с PG или обратной связью тахометра
с.) Вектор разомкнутого цикла
D.) Замкнутый контур или вектор потока
A.) Метод управления В / Ф, напряжение / частота, — также называемый управлением вольт на герц, является наиболее распространенным методом управления инвертором. Не требуя устройства обратной связи, он подходит для применения в двигателях общего назначения и с несколькими двигателями.
B.) Управление напряжением / частотой с обратной связью PG обеспечивает лучшее регулирование скорости по сравнению с системой с обратной связью.
С.) Вектор разомкнутого контура , иногда называемый бессенсорным вектором , использует более сложный алгоритм управления для обеспечения точного управления скоростью, быстрого отклика и более высокого крутящего момента на низкой скорости.
D.) Вектор потока или вектор с обратной связью требует обратной связи от энкодера и обеспечивает точное управление скоростью и полным номинальным крутящим моментом в широком диапазоне скоростей — иногда даже при нулевых оборотах в минуту.
Инверторыи их двигатели также могут работать в профиле «Постоянная мощность в лошадиных силах», при котором скорость двигателя может быть увеличена за пределы номинальной скорости с понижением номинальной мощности крутящего момента.См. Раздел H.12, «Подъемники постоянной мощности» для более подробного описания этого типа работы.
5.) Регенерация:
Регенерация основана на способности двигателей переменного и постоянного тока действовать как генераторы, а также как двигатели. Регенерация — это рабочий режим, который автоматически реализуется секцией управления скоростью привода REGEN всякий раз, когда обратная связь по скорости превышает задание скорости. Благодаря мощности рекуперативного привода двигатель может обеспечивать двигательный (положительный) крутящий момент или тормозной (отрицательный) крутящий момент, обычно в любом направлении вращения.Это называется операцией «четыре квадранта». Приводы без рекуперации обеспечивают только «одноквадрантную» работу, хотя добавление реверсивных контакторов к приводам постоянного тока может обеспечить работу двигателя в третьем квадранте.
Таким образом, в двигательном режиме мощность берется из сети переменного тока и преобразуется в работу двигателя. В режиме рекуперации собственная генерируемая мощность отбирается от двигателя и возвращается в линию переменного тока или рассеивает энергию «тормозными резисторами» для создания отрицательного или тормозного момента в двигателе.Эта функция полезна при работе с высокоинерционными или ремонтными нагрузками двигателя. В приводах постоянного тока регенеративная способность также обеспечивает «твердотельное реверсирование». Без регенерации для реверсирования должны использоваться контакторы постоянного тока. Частое реверсирование даже при низких уровнях нагрузки может привести к сокращению ожидаемого механического срока службы контакторов. Для привода с рекуперацией рекомендуется использовать только один контактор для «аварийного останова».
Для возможности «регенерации» в приводе постоянного тока требуется вторая силовая секция и больше схем управления, чем в приводах без рекуперации, в то время как большинство инверторных приводов переменного тока по своей сути включают некоторую возможность регенерации.Большинство приводов переменного тока с более низким номиналом мощности также поставляются со схемой «тормозного транзистора», необходимой для расширения возможностей рекуперации с добавлением только тормозного резистора. Кроме того, некоторые приводы переменного тока могут иметь возможность «регенерации линии», когда избыточная энергия двигателя возвращается в линию, а не рассеивается через резисторы. Рекуперативные приводы постоянного тока обычно могут обеспечивать более высокий постоянный отрицательный крутящий момент, чем инверторный привод, использующий тормозной резистор. Номинальная мощность тормозного транзистора и резистора инвертора в непрерывном режиме будет определять рабочий цикл.ПРИМЕНИМЫЕ ТОВАРЫ:
D10425-XXX СЕРИЯ
ТРОПЕР IV
RCP200 СЕРИИ
BLAZER IV СЕРИИ
СЕРИЯ ELITE PRO (модели EPR)
ЭЛИТНАЯ СЕРИЯ (модели E12)
* В этом руководстве по основам управления двигателем рассматриваются следующие темы: крутящий момент двигателей постоянного тока, крутящий момент двигателя переменного тока, управление скоростью двигателя переменного тока, контроллер скорости двигателя постоянного тока. Прочтите другие полезные руководства по управлению двигателем и советы по применению, щелкнув «Назад к указателю» ниже.
Назад «Типы приводов с регулируемой скоростью» • Вернуться к указателю • Далее «Несколько приводов — координированное управление»
Перейти к линейке продуктов • Перейти к приводам постоянного тока и принадлежностям • Перейти к компонентам интерфейса системы