Частотный регулятор скорости. Принцип действия регулятора.
Хорошая вентиляция воздуха в жилом помещении играет большую роль в жизни человека. Микроклимат прямо зависит от вентиляционной установки. Основной по популярности сегодня системой вентиляции является приточно-вытяжная.
Регуляторы скорости асинхронных двигателей
Множество новых установок вытяжки оснащены электрическим двигателем с возможностью регулировки оборотов электродвигателя. Для регулирования оборотов применяют приборы специального типа, частотные схемы вращения двигателя. Такие моторы применяются не только в устройствах вытяжки, но и в быту дома.
Недавно регуляторы скорости вращения электродвигателей асинхронного типа имели в своем составе реле и простые разъединители, которыми производили запуск наибольших оборотах, останавливали привод мотора.
Все регуляторы скорости, как и частотные, служат для того, чтобы менять обороты двигателя. Главная опция регулятора – это изменение мощности системы вытяжки, различного оборудования.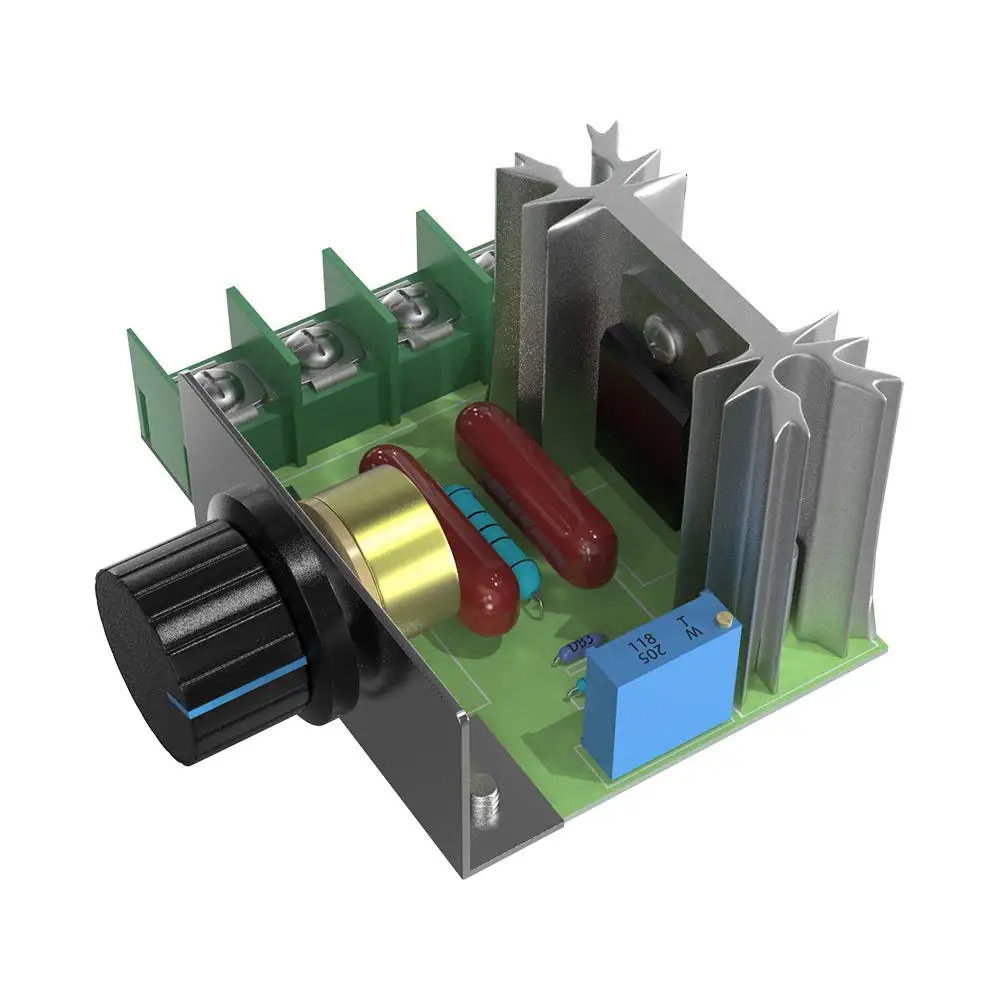 Кроме этого, частотные регуляторы имеют и другие функции:
Кроме этого, частотные регуляторы имеют и другие функции:
- снижение износа механизма в работе;
- малый расход электроэнергии;
- низкая шумность на большой скорости.
Многие приборы, которые имеют свойство изменения оборотов, применяются как единичные приборы, так и дополнительными блоками для управления приборами в быту с электрическими двигателями.
Способы изменения скорости
Для многих видов двигателей применяют такие варианты регулировки скорости:
- регулирование напряжения питания;
- схемы подключения обмоток моторов с несколькими скоростями;
- частотный метод изменения токовых значений;
- применение коммутатора электронного типа.
Регулятор напряжения позволяет применять простые устройства для мягкой регулировки ступенчатого типа скорости. Для асинхронных двигателей с внешним ротором целесообразно изменять сопротивление якоря, оптимизации оборотов мотора. В этом случае значение скорости будет изменяться в значительном интервале.
Виды и типы скоростных регуляторов
- применение тиристоров;
- схема с использованием симисторов;
- частотные инверторы;
- трансформаторные типы.
Регуляторы на тиристорах применяются для 1-фазных моторов, кроме изменения скорости, производят защиту механизмов от скачков напряжения и нагрева.
Симисторные регуляторы управляют многими моторами одновременно, если значение мощности не больше максимального. Это самый распространенный способ.
3-фазный регулятор точнее, имеет предохранитель тока, фильтр сглаживания шума на основе конденсатора.
Регулятор частотный для мотора асинхронного типа применяется при изменении напряжения входа в интервале 0-480 вольт, контроль скорости производится изменением электроэнергии. Он применяется в 3-фазных моторах, кондиционерах, вентиляторах с большой мощностью.
Для мощных двигателей применяют регулятор из трансформатора с тремя или с одной фазой. Этим устройством можно регулировать скорость мотора ступенями. Один трансформатор работает со многими моторами в одно время автоматически.
Один трансформатор работает со многими моторами в одно время автоматически.
В эксплуатации электромотора кроме шума появляются помехи от электромагнитных волн, которые устраняются кабелем с экраном. Если применять 3-фазный регулятор скорости, то шума не бывает. Нужна установка фильтров сглаживания.
Для применения частотных регуляторов специалисты рекомендуют:
- контролировать соединения проводов и заземления;
- фильтр от помех;
- размещение регулятора в защищенном от солнца месте;
- вертикальное расположение регулятора для лучшего рассеивания тепла;
- не использовать частое выключение и включение для долгого времени службы.
Частотный регулятор скорости РМТ
Эти частотные регуляторы служат для регулировки скорости вращения электродвигателя вентилятора короткозамкнутого асинхронного типа, на 380 вольт. Действие регулятора основывается на принципе регулировки частоты, в то время как регулировка скорости вращения осуществляется путем частотного изменения напряжения на трех фазах, которое подключается на двигатель вентиляторной установки (25-50 герц). Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Управлять вентилятором можно от пульта управления или сигналом снаружи от 0 до 10 вольт.
Принцип действия преобразователя частоты, или инвертора заключается в следующем. Напряжение питания переменного тока проходит через выпрямитель на диодах, фильтр батареи емкостей значительного размера для уменьшения пульсаций потенциала, получаемого двигателем. Далее, питающее напряжение поступает на сборку из 6-ти транзисторов (биполярных управляемых) с затвором, изолированным от прохождения тока с диодами.
Диоды защищают транзисторы от пробивания потенциала обратной полярности, которое образуется при действии с обмотками мотора. При закрывании и открывании перекрестных транзисторных пар образуются 3 смещенные на 120 градусов графика синуса управляемости обмоток мотора с частотой 25-50 герц.
Подключение регулятора производится зажимами с площадью сечения 6 мм2. Затягивать необходимо усилием 1,2 Н*м для основных контактов, 0,3 Н*м для управляющих контактов.
Частотный регулятор для регулировки скорости вращения асинхронного двигателя
Качественный обмен воздуха в помещении в значительной мере влияет на комфорт жизни в квартире. Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Чистый воздух, сухие стены, мягкий микроклимат в доме напрямую зависит от наличия системы вентиляции. При этом к самой популярной на сегодняшний день системе обмена воздушных потоков в помещении относится принудительная вентиляция, работающая по приточно-вытяжному принципу.
Большинство современных вентиляторов для вытяжных систем снабжаются электродвигателем с регулируемой скоростью вращения. При этом для изменения оборотов вентилятора используют специальные регуляторы, в том числе и частотные системы изменения скорости вращения асинхронного двигателя, который используется как в вытяжных устройствах, так и в различных бытовых приборах в квартире.
Предназначение и функции регуляторов
Ещё не так давно устройства регулировки скорости вращения асинхронного электродвигателя состояли
Любой регулятор оборотов двигателя, в том числе и частотный, предназначен для изменения скорости вращения мотора. При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
При этом основной функцией регулятора скорости является изменение производительности вытяжной системы или другого оборудования. Но помимо этого такие приборы обладают и дополнительными возможностями, о которых не стоит забывать:
- уменьшение износа оборудования в процессе эксплуатации;
- экономия потребляемой электрической энергии;
- снижение шумов на максимальных оборотах.
Большинство приборов, регулирующих скорость вращения электродвигателя, могут быть использованы как отдельный элемент системы, так и являться дополнением электронного блока управления, бытовым прибором, приводящимся в действие мотором.
Варианты регулировки скорости электродвигателя
Для изменения скорости вращения как асинхронного, так и любого другого двигателя, используется несколько вариантов регулировки оборотов:
- регулировка подачи напряжения;
- переключение обмоток асинхронных многоскоростных двигателей;
- частотная регулировка показателей тока;
- использование электронного коммутатора.

Изменение напряжения даёт возможность использовать достаточно дешёвые устройства для плавной или многоступенчатой регулировки скорости. Если говорить об асинхронных моторах, которые имеют внешний ротор, то для них лучше использовать регулятор сопротивления якоря для изменения оборотов. При этом частотная регулировка позволяет изменять скоростные показатели в достаточно широком диапазоне.
Разновидности моделей, регуляторов оборотов
- регуляторы, собранные на тиристорах;
- симисторные стемы изменения скорости;
- частотные регуляторы;
- регуляторы на основе трансформаторов.
Тиристорные регуляторы скорости используются для однофазных двигателей и позволяют помимо изменения оборотов вращения защищать оборудование от перегрева и перепадов напряжения.
Симисторные устройства могут управлять сразу несколькими электромоторами, работающими как на постоянном, так и переменном токе, но при условии, что параметры мощности не будут превышать предельных значений. Такой способ изменения оборотов один из самых популярных, если необходимо регулировать скорость благодаря изменению показателей напряжения от минимального до номинального значения.
Трёхфазный регулятор, более точный, и снабжается предохранителем, контролирующим, уровень тока. А чтобы снизить шумовые эффекты на низких оборотах устанавливается сглаживающий фильтр, состоящий из конденсатора.
Частотный регулятор скорости для асинхронного двигателя используется при преобразовании входного напряжения в диапазоне от 0 до 480 вольт, а непосредственный контроль оборотов осуществляется благодаря изменению подаваемой электрической энергии. Чаще всего такие регуляторы используются в трёхфазных двигателях, систем кондиционирования и вентиляции достаточно большой мощности.
Также для мощных электромоторов используют регулятор на основе однофазного или трёхфазного трансформатора. Благодаря такому устройству появляется возможность ступенчатой регулировки скорости двигателей. При этом одним трансформатором можно управлять сразу несколькими устройствами в автоматическом режиме.
Частотные регуляторы асинхронных моторов
Ещё нет так давно встретить частотный регулятор скорости для асинхронного двигателя было практически невозможно, а стоимость таких устройств была неоправданно высокой. При этом основной причиной дороговизны таких устройств было отсутствие качественных транзисторов и модулей высокого напряжения. Но благодаря разработкам в сфере твердотельных электронных устройств этот вопрос был решён. Вследствие этого рынок электроники заполонили сварочные инверторы, инверторные кондиционеры и частотные преобразователи.
На сегодняшний день, частотные регуляторы – самый распространённый метод регулировки, мощностных характеристик оборотов и уровня производительности большинства механизмов, которые приводятся в действие асинхронным трёхфазным электродвигателем.
При таком методе изменения скоростных показателей в электродвигателе, к нему подключается специальный частотный регулятор. В большинстве случаев это тиристорные преобразователи частоты. При этом сама регулировка оборотов осуществляется посредством изменения частотных показателей напряжения, которые непосредственно влияют на скорость вращения асинхронного электромотора.
Хочется отметить, что во время снижения частотных показателей падает, и перегрузочная способность электродвигателя и поэтому для компенсации мощностных потерь нужно увеличивать напряжение. При этом величина напряжения зависит от конструктивных особенностей привода. Если регулировка выполняется на моторе, работающем с постоянным уровнем нагрузки на валу, то величина напряжения увеличивается пропорционально падению частоты. Но при увеличении оборотов это недопустимо и может привести к выходу из строя двигателя.
В случае, когда частотная регулировка выполняется на электродвигателе постоянной мощности, то увеличение напряжения производится пропорционально корню квадратному падения частоты. При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
При изменении оборотов в вентиляционных установках подаваемое напряжение изменяется пропорционально квадрату снижения частоты.
Частотные регуляторы скорости для асинхронных электродвигателей – единственно правильный способ изменения оборотов мотора. В первую очередь это обусловлено возможностью изменения скорости в максимально широком диапазоне практически без потери мощности и уменьшения перегрузочных характеристик мотора.
Особенности использования регуляторов скорости
В качестве элемента системы, автоматического изменения скорости вращения, вентиляционных устройств частотный регулятор обеспечивает контроль функционирования
всего вытяжного механизма. При этом в процессе использования устройства для регулировки оборотов любых, в том числе и асинхронных двигателей, появляются дополнительные шумы, которые можно устранить, только используя трансформаторный регулятор.Также кроме шума во время работы электродвигателя на разных скоростях могут появиться электромагнитные помехи, устранить которые можно за счёт экранированного кабеля. При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации.
При использовании трёхфазного регулятора с шумом проблем не возникает, но обязательна дополнительная установка сглаживающих фильтров. Но вне зависимости от модели используемого регулятора существуют рекомендации по их эксплуатации.
- Прежде чем включать устройство в сеть переменного тока важно проверить все соединительные элементы и провода на качество заземления.
- Чтобы устранить различные помехи в сети важно устанавливать специальный фильтр.
- Для недопущения перегрева регулятора оборотов мотора, его размещают в месте, куда не попадает солнце. В противном случае из-за повышения температуры устройство будет работать на предельной нагрузке и может перестать реагировать на показатели датчиков.
- Любой регулятор, в том числе и частотный для асинхронного двигателя должен размещаться вертикально, что позволит качественно рассеивать тепло, выделяемое, в процессе работы прибора.
- Не рекомендовано очень часто производить включение или выключение регуляторов, так как в процессе непрерывной работы они функционируют в оптимальных условиях и поэтому реже выходят из строя.

В настоящее время всё чаще используют частотные регуляторы, так как они имеют компактные размеры и невысокую стоимость по сравнению с трансформаторными аналогами. При этом во время работы такие устройства подают номинальное напряжение на электромотор.
Частотный регулятор скорости для асинхронного электродвигателя
Асинхронный двигатель одно- или трехфазного тока – один из самых распространенных как в промышленности, так и среди бытовых пользователей, где он может являться основой насосов и маломощных агрегатов различного назначения. К его достоинствам относят:
· надежность, связанную с отсутствием щеточного узла;
· простоту изготовления;
· невысокую стоимость;
· высокий КПД в штатном режиме работы.
О надежности этого оборудования лучше всяких слов говорит то, что на многих объектах можно встретить исправно работающие моторы, которые введены в эксплуатацию более 50 лет назад. Есть у электродвигателей этого типа и ряд недостатков. К самым существенным относятся:
Есть у электродвигателей этого типа и ряд недостатков. К самым существенным относятся:
· низкий крутящий момент на старте;
· ограничение максимальной скорости вращения, зависящее от частоты питающей электросети;
· сложность регулировки скорости вращения электромотора.
Применение частотных преобразователей для двигателей, рассчитанных на работу с напряжением 220В, 380В и выше устраняет или уменьшает все перечисленные недостатки и позволяет добавить в систему с такими двигателями новый функционал.
До применения частотного принципа управления асинхронным мотором при необходимости регулировать скорость использовалось несколько вариантов управления скоростью вращения таких двигателей:
· механическое с помощью редуктора. Своеобразная коробка передач – решение сложное, дорогое, требующее регулярного обслуживания и ремонта. Также понижает общий КПД системы;
· ступенчатое изменение питающего напряжения с помощью трансформатора. Позволяет управлять мощностью двигателя, однако вводит его в нештатный режим, вызывает нагрев. Точная установка скорости вращения в таких системах практически невозможна;
Позволяет управлять мощностью двигателя, однако вводит его в нештатный режим, вызывает нагрев. Точная установка скорости вращения в таких системах практически невозможна;
· электронное с отсеканием части полупериода питающего напряжения с помощью тиристорной схемы. Позволяет регулировать мощность, однако такой принцип управления создает вибрации и также не позволяет точно управлять частотой вращения.
Современные технологии регулировки частоты вращения и мощности предусматривают, в большинстве случаев, использование частотного регулятора на полупроводниковых ключах.
Принцип работы частотного регулятора
Принцип, положенный в основу работы любого современного частотного преобразователя, очень прост:
-
во-первых, нужно выпрямить входное напряжение;
-
во-вторых, его следует отфильтровать и стабилизировать;
-
и, в-третьих, нужно сгенерировать питающее напряжение, по форме близкое к синусоидальному, требуемой частоты и амплитуды.
Этот подход позволяет исключить изменение режима работы привода при колебаниях напряжения в сети и получить возможность точной регулировки скорости вращения и выходной мощности. Такой принцип регулировки применим как к однофазным электромоторам, для которых требуется одна такая схема, так и к трехфазным асинхронным электродвигателям, требующих три группы таких выпрямителей-преобразователей с синхронизацией их работы для получения трехфазного выходного напряжения с заданным сдвигом.
Схемотехника современных преобразователей частоты
С появлением мощных полупроводниковых компонентов, способных управлять высоким напряжением и большими токами схемотехнические решения блоков регулировки частоты стали строиться достаточно просто. Так, для работы в цепях с напряжением на выходе инвертора до 690 В, с успехом применяются схемы на тиристорах и IGBT-транзисторах, которые стоят дороже, но обеспечивают более «чистый» выход. В таких схемах управления на каждую фазу устанавливают по два ключа с соответствующей управляющей обвязкой. Для удешевления конструкции на выходе обычно не используют фильтры для подавления гармоник, поскольку к выходу подключается индуктивная нагрузка.
В таких схемах управления на каждую фазу устанавливают по два ключа с соответствующей управляющей обвязкой. Для удешевления конструкции на выходе обычно не используют фильтры для подавления гармоник, поскольку к выходу подключается индуктивная нагрузка.
Для высоковольтных электродвигателей может использоваться такой же принцип с усложненной схемотехникой. Питание на выходе каждой фазы формируется последовательно подключенными модулями, каждый из которых формирует свой участок выходной синусоиды, а общее напряжение формируется как сумма напряжений на выходе каждого модуля.
Существуют также бестрансформаторные преобразователи и прямые преобразователи частоты без блока выпрямления и фильтрации. Каждое схемотехническое решение имеет свои достоинства и недостатки, которые следует учитывать при выборе. Однако сам блок преобразователя, по какой бы схеме он не был построен, требует еще достаточно сложной автоматики управления режимами работы.
Автоматика управления работой частотного преобразователя
Регулирование режимом работы двигателя через частотный преобразователь выполняется сложной автоматикой управления, которая в большинстве моделей современных частотников строится на основе микроконтроллера или микропроцессора.
Система управления выполняет целый ряд функций, которые значительно расширяют возможности систем на основе асинхронных двигателей. К ним могут относиться:
· программы плавного пуска и остановки электромотора;
· защитное отключение при перегрузках, перегреве и заклинивании;
· модули сопряжения с системой централизованной диспетчеризации;
· возможность подключения внешних датчиков обратной связи, позволяющих управлять работой двигателя для поддержания стабильного состояния системы, например, скорости потока воздуха или давления воды;
· возможность работы по заранее заданной программе.
На рынке сегодня представлены сотни моделей частотных преобразователей для управления асинхронными электромоторами. Причем представлены как универсальные серии, так и специализированные, например, для лифтового, насосного или вентиляционного оборудования, что несколько упрощает выбор. Если вам необходима помощь в выборе оптимальной модели частотного преобразователя для управления асинхронным двигателем, вы всегда можете обратиться к сотрудникам нашей компании.
Если вам необходима помощь в выборе оптимальной модели частотного преобразователя для управления асинхронным двигателем, вы всегда можете обратиться к сотрудникам нашей компании.
вернуться в блог
Преобразователь частоты для электродвигателя
30.10.2017
Тематика: Полезная информация
Введение
Существует немало технологических операций, нуждающихся в регулировании угловых скоростей приводных валов механизмов. Традиционно эта задача решалась двумя путями:
- применением механических многоскоростных редукторов для ступенчатого регулирования скорости, либо вариаторов для плавного регулирования;
- использованием электродвигателей постоянного тока совместно с регуляторами уровня питающего напряжения.
Регулирование угловой скорости ротора, основанное на изменении передаточного числа механической трансмиссии, характеризуется снижением общего КПД передачи. Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Это объясняется высоким уровнем механических потерь в редукторе, подверженном к тому же, интенсивному износу.
Двигатели постоянного тока представляют собой достаточно сложные и дорогие машины. Наличие коллекторного механизма со щёточным аппаратом, предъявляет повышенные требования к их обслуживанию и снижает надёжность.
Компания Овердрайв-Электро предлагает частотно-регулируемые приводы ABB со склада в Минске:
Принцип частотного регулирования
В основе частотного регулирования двигателя переменного тока лежит взаимосвязь угловой скорости, с которой вращается поле статора с частотой напряжения питания. Это означает, что изменение частотной характеристики напряжения статора приводит к пропорциональному изменению угловой скорости вращающегося ротора. Угловая скорость, или частота вращающегося поля статора асинхронного электрического двигателя выражается следующим соотношением:
ω0 = 2πf1/р,
где f1 — значение частоты напряжения, питающего обмотку статора, р — количество полюсных пар статорной обмотки.
Из приведенной формулы следует, что совершая изменение значения частоты подводимого к двигателю напряжения, можно плавно изменять значение угловой скорости (частоты) вращающегося поля статора, что приведёт к изменению частоты вращения ротора электродвигателя.
Данный принцип позволяет использовать в регулируемых приводах наиболее технологичные, простые и надёжные асинхронные двигатели, имеющие короткозамкнутый ротор. Благодаря высоким технико-экономическим показателям систем частотного регулирования происходит их активное внедрение в сферу промышленной и бытовой техники.
Устройство преобразователя частоты.
На рисунке 1 показана структурная схема, иллюстрирующая устройство преобразователя частоты (ПЧ).
Рис.1 Преобразователь частоты
Сетевое питающее напряжение промышленной частоты 50 герц поступает на вход выпрямителя (В), представляющего собой обычную мостовую диодную сборку. На выходе выпрямителя установлен Г — образный LC фильтр, выполняющий функции сглаживания пульсаций, которые присутствуют в выпрямленном напряжении.
Основной частью преобразователя является инвертор (И), осуществляющий преобразование постоянного напряжения в трёхфазную систему напряжений синусоидальной формы с регулируемой частотой и амплитудой. Ключевыми элементами инвертора служат мощные IGBT транзисторы, которые коммутируются сигналами, генерируемыми в системе импульсно — фазового управления. Система управления транзисторами, формирующими выходное напряжение, которое поступает на статор асинхронного двигателя (АД), основана на принципе ШИМ — широтно-импульсной модуляции. Сигнал управления представляет собой чередование импульсов напряжения с изменяемой скважностью.
Примечание. Скважность — это оценочная характеристика периодического импульсного сигнала, рассчитываемая как отношение периода чередования сигнала к длительности импульса. То есть, величина скважности показывает, какую часть периода занимают импульсы. При изменении скважности изменяется соотношение длительностей импульсов и промежутков между ними.
Следует обратить внимание на одну интересную особенность частотных преобразователей. На рисунке 1 показан преобразователь, подключенный к трёхфазной сети. Существуют модели преобразователей, питающихся от однофазной сети, при этом, на выходе инвертора формируется всё та же трёхфазная система. Разница между трёхфазными и однофазными частотными преобразователями заключается только в качестве напряжения на выходе выпрямителя. Трёхфазный выпрямительный мост создаёт меньший уровень пульсаций напряжения, по этой причине, однофазное выпрямление предъявляет повышенные требования к параметрам LC фильтра.
Применение частотных преобразователей
Сегодня трудно найти область, где не нашли своего применения частотно-регулируемые приводы асинхронных электродвигателей.
На крупных блочных электрических станциях частотные регуляторы осуществляют регулирование подачи топлива в котлы, гибко адаптируя работу энергоблоков к изменяющемуся режиму работы энергосистемы. В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
В этом качестве частотные приводы функционируют как исполнительные звенья автоматизированной системы управления технологическими процессами электростанции.
Частотное регулирование приводов мощных вентиляторов промышленных систем позволяет автоматически поддерживать оптимальные условия их работы при изменении внутренних и внешних факторов, экономя при этом электрическую энергию и продлевая ресурс оборудования.
Большую финансовую экономию принесло внедрение частотных регуляторов в городские системы водоснабжения. Рабочее давление в водоводах питьевого назначения ранее поддерживалось в основном путём оперирования задвижками. Это приводило к неэффективной работе насосного оборудования, повышенному расходу энергии и износу. Насосы, оснащённые частотным приводом способны гибко реагировать на изменение расхода воды в системе и изменяя частоту вращения поддерживать необходимое давление.
Применение частотных регуляторов не обошло стороной и область бытовой электротехники. Все современные стиральные машины и пылесосы оснащены частотным приводом. Это позволило отказаться от редукторов и ремённых приводов и повысить экономичность работы домашних агрегатов.
| Принцип действия трехфазного асинхронного двигателя |
| Пуск звезда-треугольник трехфазного электродвигателя | |||||
| |||||
 Рассмотрим эту схему подробнее.
Рассмотрим эту схему подробнее.
| РЕГУЛИРОВКА ОБОРОТОВ ЭЛЕКТРОДВИГАТЕЛЕЙ | |||||
| |||||
| Регулятор оборотов электродрели своими руками | |||||
| |||||
 Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
Транзисторные регуляторы имеют, как правило, низкий КПД, что ведет к увеличению размеров и массы трансформатора питания и теплоотвода. В этом отношении более выгодны тринисторные устройства, поскольку потери энергии в тринисторе, работающем в ключевом режиме, незначительны. По этой причине отпадает необходимость в отводе от него тепла.
| Ремонт и проверка работоспособности коллекторных электродвигателей стиральных машин. | |||||
| |||||
 Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
Для обеспечения работы асинхронного двигателя требуется фазосдвигающий конденсатор — подобная схема включения двигателя используется в большинстве старых моделей СМ.
В современных машинках для управления асинхронным двигателем используется сложная электронная система управления, поэтому его проверка без специального стенда (или «тестовой» СМ) вызывает определенные затруднения. Еще большие проблемы вызывает проверка двигателей с прямым приводом (например, они используются в машинах LG DirectDrive). Их трудно проверить отдельно, так как они являются частью конструкции бака. К тому же, для этих двигателей также необходима сложная система управления.
| Как должна происходить разборка электродвигателя | |||||
| |||||
 Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
Место посадки заливают керосином или антикоррозионной жидкостью для устранения коррозии в месте контакта. При снятии этих деталей используют двух- или трехлапчатые съемники (переносные ручные или гидравлические).
| Системы плавного пуска высоковольтных электродвигателей на основе устройств серии УППВЭ | |||||
| |||||
| Электрическая схема пуска трехфазного электродвигателя | |||||
| |||||
 На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
На рис 1. показан вариант схемы пуска с питанием катушки магнитного пускателя переменным током напряжением 220 вольт. Напряжение снимается с двух проводов: любого фазного провода и нейтрального провода (на схеме рис.1 провода «C» и «N»).
| Устройство асинхронного электродвигателя | |||||
| |||||
| ЭЛЕКТРОДВИГАТЕЛЬ БЕСКОНТАКТНЫЙ МОМЕНТНЫЙ ДБМ254-120-57 |
| ШИМ-регуляторы оборотов маломощных коллекторных электродвигателей | |||||
| |||||
 Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Однако такой вариант дает низкий КПД, не дает возможности делать плавную регулировку (переменные резисторы в несколько десятков Ом не распространены).
Регуляторы скорости вращения вентиляторов
Способы регулирования скорости вращения вентиляторных двигателей
Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов
Тиристорные (симисторные) регуляторы скорости вращения
Электронный автотрансформатор
Сравнение регуляторов частоты вращения вентилятора
Способы регулирования скорости вращения вентиляторных двигателей
При использовании вентиляторов часто возникает необходимость регулирования частоты вращения. В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума, настроить необходимую производительность притока или вытяжки.
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума, настроить необходимую производительность притока или вытяжки.
На настоящий момент широко распространены способы регулирования частоты вращения при помощи изменения электрических параметров питания вентилятора:
- изменение напряжения питания двигателя;
- изменение частоты питающего напряжения.
Регулирование напряжением осуществляется понижением питающего напряжения вентилятора. Преимуществом регулирования частоты вращения вентилятора изменением напряжения питания в относительно невысокой стоимости устройств, работающих по такому принципу. Известны следующие виды устройств для регулирования оборотов вентилятора при помощи понижения напряжения питания:
- Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов;
- Тиристорные регуляторы скорости вращения;
- Электронные автотрансформаторы.

Регулирование скорости понижением напряжения связано с изменением, так называемого, скольжения двигателя. При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
Регулирование вентилятора частотой питающего тока возможно осуществить при помощи частотного привода. У частотных приводов много преимуществ, но есть один существенный недостаток – их цена. Кроме того, они громоздки. Используемые в быту и для коммерческого использования вентиляторы обычно имеют невысокую цену. Вряд ли покупатель бытового вентилятора согласиться приобрести для него регулятор стоимостью, в десятки раз превышающую стоимость самого вентилятора. Поэтому в этой статье мы частотные приводы рассматривать не будем.
Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов
Работа ступенчатых регуляторов скорости основана на использовании автотрансформаторов. Управление данными регуляторами осуществляется путем ступенчатого изменения напряжения питания. Регулирование скорости осуществляется вручную. Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
К преимуществам использования ступенчатых автотрансформаторов можно отнести чистую синусоиду на выходе и высокую перегрузочную способность. К недостаткам большую массу и габариты.
Примером регулятора частоты вращения со встроенным ступенчатым автотрансформатором является O’Erre RG 5 AR
(на изображении выше). Данный регулятор позволяет включать вентилятор на 5-ти различных скоростях. Регулятор частоты вращения O’Erre RG 5 AR может управлять реверсивными вентиляторами. Также на него можно завести управление светом. Максимальная мощность подключаемого вентилятора 80 Вт. Регулятор RG 5 AR оснащен плавким предохранителем с номиналом 2 А-220 В.
Данный регулятор позволяет включать вентилятор на 5-ти различных скоростях. Регулятор частоты вращения O’Erre RG 5 AR может управлять реверсивными вентиляторами. Также на него можно завести управление светом. Максимальная мощность подключаемого вентилятора 80 Вт. Регулятор RG 5 AR оснащен плавким предохранителем с номиналом 2 А-220 В.
Тиристорные (симисторные) регуляторы скорости вращения
В тиристорных регуляторах вращения используют принцип фазового управления, когда изменяется момент включения тиристоров относительно перехода сетевого напряжения через ноль. Для простоты обычно говорят, что изменяется выходное напряжение.
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) другими словами симистор. Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.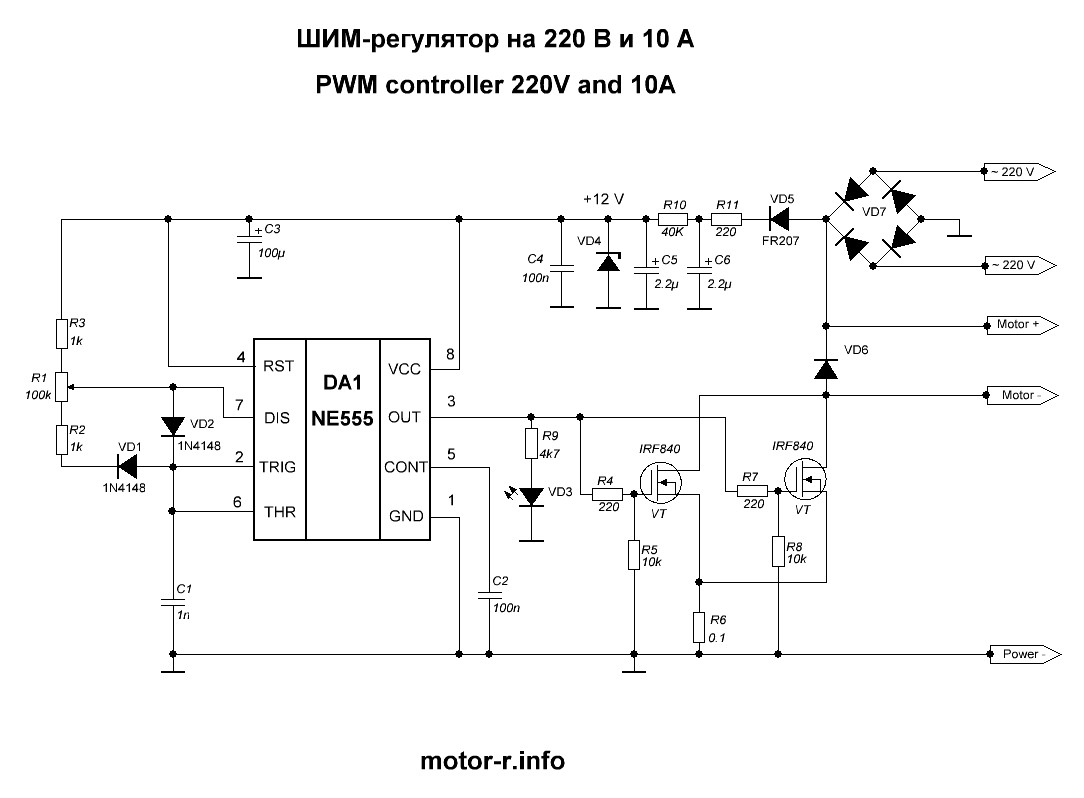 Таким образом, изменяется среднеквадратичное значение напряжения.
Таким образом, изменяется среднеквадратичное значение напряжения.
Есть ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры), однако для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- Установлен нижний порог напряжения подаваемого на двигатель вентилятора
- Мощность симистора выбирается так, чтобы его максимальный рабочий ток превышал рабочий ток вентилятора не менее, чем в 4 раза (при резистивной нагрузке в 2 А достаточно взять симистор также на 2 А).
- Предохранитель подбирается исходя из мощности электродвигателя (обычно максимальный ток предохранителя должен быть на 20% больше рабочего тока двигателя).

- Для более правильного формирования синусоиды установлен дополнительный фазосдвигающий демпфирующий конденсатор.
- Для уменьшения сетевых помех используется дополнительный конденсатор помехоподавления
К достоинствам тиристорных регуляторов можно отнести их малую стоимость, низкую массу и размеры. К недостаткам — использование для двигателей небольшой мощности, при работе возможен шум, треск, рывки двигателя, при использовании симисторов на двигатель попадает постоянное напряжение.
Тиристорные (симисторные) регуляторы частоты вращения применяются с вентиляторами, имеющими однофазные двигатели со встроенной автоматической термозащитой. Электродвигатель должен быть спроектирован для работы с регуляторами подобного типа.
Примером симисторого регулятора частоты вращения вентилятора служит Soler & Palau Reb-1N. Этот регулятор выпускается как для скрытой установки в стандартный подрозетник, так и для открытого монтажа. Регулятор имеет встроенный плавкий предохранитель. Возможна регулировка минимальной скорости вентилятора. Включение/выключение через колесо регулировки. Максимальная мощность подключаемого вентилятора 220 Вт.
Регулятор имеет встроенный плавкий предохранитель. Возможна регулировка минимальной скорости вентилятора. Включение/выключение через колесо регулировки. Максимальная мощность подключаемого вентилятора 220 Вт.
Электронный автотрансформатор
Электронный автотрансформатор – это транзисторный регулятор напряжения. Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT). Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность. Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же, как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора заключаются в его небольших габаритах и массе, невысокой стоимости, чистой синусоиде на выходе и отсутствием гула на низких оборотах.
Недостатком можно назвать небольшое расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора).
Электронный автотрансформатор SB033 выполнен для установки на DIN-рейку. Регулятор имеет регулировку минимальной скорости вращения вентилятора. Работой регулятора можно управлять сигналом 0-10 В. Регулятор SB033 имеет реле статуса работы регулятора для подключения привода воздушной заслонки или калорифера. Светодиод на передней панели отображает статус работы или ошибки регулятора. Возможно подключение к SB033 ручки управления, которая устанавливается в стандартный подрозетник.
Сравнение регуляторов частоты вращения вентилятора
|
Наименование |
O’Erre RG 5 AR |
Soler & Palau Reb-1N |
SB033 |
|
Принцип работы |
Ступенчатый автотрансформатор |
Симисторный регулятор |
Электронный автотрансформатор |
|
Регулировка оборотов |
5 скоростей |
Плавная |
Плавная |
|
Мощность, Вт |
80 |
220 |
220 |
|
Синусоида |
чистая |
рваная |
чистая |
|
Способ установки |
Открытая |
Скрытая/открытая |
На DIN-рейку |
|
Подключаемый вентилятор |
Любой асинхронный |
Асинхронный, со встроенной термозащитой, должен быть спроектирован для работы с симисторными регуляторами |
Любой асинхронный |
|
Дополнительные возможности |
Возможно подключение реверсивного вентилятора, возможность включения света |
Регулировка минимальных оборотов, вкл/выкл через колесо регулировки оборотов |
Возможность управления 0-10 В, реле статуса работы, светодиодная индикация статусов работы и ошибок, возможно подключения ручки управления для установки в стандартный подрозетник |
|
Достоинства |
Высокая перегрузочная способность, возможность подключать несколько вентиляторов к одному регулятору |
Малая стоимость, малый размер |
Малый размер, экономичная работа, наибольшая долговечность вентилятора при использовании с электронным автотрансформатором по сравнению с другими регуляторами |
|
Недостатки |
При регулировании греется – отсюда потери электричества на нагрев |
Шум на малых оборотах |
Источник: teplo-spb. ru
ru
Ключевые слова: регуляторы частоты вращения вентилятора, вентиляторы
Управление частотным преобразователем, векторное, скалярное.
Компания Русэлком производит и поставляет преобразователи частоты для управления асинхронными двигателями. Поэтому для понимания принципа частотного управления рассмотрим более детально работу асинхронного двигателя и методы его частотного регулирования
Конструкция асинхронного двигателя схематически изображена на рис. 2. Двигатель состоит из неподвижной части, которая называется статор и подвижной (вращающейся) части называемой ротор.
В пазах статора уложены три группы обмоток А-В-С. Обмотки статора сдвинуты друг относительно друга в пространстве на угол 120°. Это является одним из двух обязательных условий для создания вращающегося магнитного поля статора.
Ротор двигателя изготовлен в виде цельного цилиндра из специальной электротехнической стали с короткозамкнутой обмоткой.
Рис.2. Схематический разрез асинхронного двигателя.
На обмотки статора от источника питания подается трехфазное напряжение uа, uв, uс с частотой
Напряжения uа, uв, uс сдвинуты друг относительно друга по фазе на 120°. Это является вторым обязательным условием для создания вращающегося магнитного поля статора.
При питании обмоток статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Угловая скорость вращения этого поля в радианах определяется по известной формуле
– число пар полюсов статора.
Переход от угловой скорости вращения поля измеряемой в радианах, к частоте вращения выраженной в оборотах в минуту, осуществляется по следующей формуле
где 60 – коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Из формулы видно, что частота вращения магнитного поля статора зависит от частоты напряжения питания и числа пар полюсов.
К примеру, в двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц частота вращения магнитного поля равна 3000 об/мин.
В синхронном электрическом двигателе частота вращения ротора на установившемся режиме равна частоте вращения магнитного поля статора
В асинхронном электрическом двигателе частота вращения ротора на установившемся режиме отличается от частоты вращения на величину скольжения . Для примера в асинхронном двигателе с одной парой полюсов при частоте питающего напряжения 50 Гц и при скольжении 5% частота вращения ротора равна 2850 об/мин.
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к.п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где — постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1: 40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости – сотые доли процента, точность по моменту – единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Что такое регулирование скорости асинхронного двигателя?
Управление скоростью асинхронного двигателя. Асинхронный двигатель — это двигатель с постоянной скоростью, что в практическом смысле означает, что изменение скорости двигателя приблизительно мало по сравнению с общим уровнем нагрузки. Хотя скорость шунтирующей системы постоянного тока может быть слишком просто изменена с соответствующей эффективностью, падение скорости асинхронных двигателей может вызвать значительную потерю эффективности и снизить коэффициент мощности. Поскольку асинхронные двигатели широко используются в различных приложениях, регулирование скорости асинхронного двигателя является важным фактором.Итак, ниже в этом посте обсуждаются различные методы контроля скорости.
Введение в управление скоростью асинхронного двигателяВ нашей среде для общих целей используются несколько типов двигателей, от бытовых устройств до машинных систем в промышленных приложениях. В настоящее время электродвигатель является незаменимым и жизненно важным источником энергии во многих отраслях промышленности. Характеристики и функции, необходимые для этих двигателей, слишком широки.
Если вы рассматриваете проблему управления скоростью двигателей, доступных на рынке, шаговые и сервосистемы контролируют их скорость с шагом импульса, тогда как бесщеточные двигатели постоянного тока и асинхронные двигатели определяют скорость с помощью дополнительного резистора или источника постоянного напряжения.Например, трехфазная индукционная система — это, по сути, двигатель с фиксированной скоростью. Так что следить за его скоростью относительно сложно. Однако управление скоростью асинхронного двигателя используется для решения проблем снижения эффективности и повышения коэффициента электрической мощности.
Схема управления скоростью асинхронного двигателя(Ссылка: circuitglobe.com )
Этот пост представляет принцип управления скоростью, структуру и характеристики различных методов, которые могут относительно просто определять скорость, используя определенные схемы.Посетите здесь, чтобы подробно изучить управление скоростью асинхронного двигателя. Скорость асинхронного двигателя может быть исследована со стороны ротора и статора.
Управление скоростью асинхронного двигателя в зависимости от статора можно разделить на:
- Контроль U / f или регулятор частоты
- Вариация значений полюсов статора.
- Контроль напряжения питания.
- Добавление переменного реостата в систему статора
Управление скоростью индукционной системы в зависимости от стороны ротора классифицируется как:
- Использование дополнительного сопротивления на секции ротора
- Путь управления каскадом
- Подача ЭДС определенной частоты скольжения в секцию ротора
Согласно формуле крутящего момента асинхронного двигателя,
T = \ frac {{K} _ {1} s {E} _ {2} ^ {2} {R} _ {2}} {\ sqrt {({R} _ {2} ^ {2} + {(s {X} _ {2})} ^ {2})}} = \ frac {3} {2 \ pi {N} _ {s}} \ frac {s {E} _ {2} ^ { 2} {R} _ {2}} {\ sqrt {({R} _ {2} ^ {2} + {(s {X} _ {2})} ^ {2})}}
Сопротивление ротора R 2 является фиксированным, и если значение (значения) скольжения довольно мало, член (sX 2 ) 2 также мал, что его можно удалить.Таким образом, T может быть связано с sE 2 2 , где E 2 — ЭДС, индуцированная в роторе, а E 2 ∝ V.
Следовательно, T можно оценить на основе (sV 2 ), что означает, что при уменьшении требуемого напряжения конечный крутящий момент падает. Следовательно, скольжение увеличивается, чтобы обеспечить тот же момент нагрузки с уменьшением напряжения, и, как результат, скорость уменьшается. Этот метод слишком прост и эффективен, но используется редко, поскольку для относительно небольшого изменения скорости требуется большое изменение выходного напряжения.
Другими словами, большое изменение конечного напряжения вызовет большое изменение плотности потока и нарушит магнитные состояния системы.
Путем изменения применяемой частотыСинхронная скорость движущегося магнитного поля в асинхронном двигателе может быть рассчитана с помощью
. {N} _ {s} = \ frac {120f} {P} (об / мин)
где f — частота системы, а P — количество полюсов статора.Синхронная скорость меняется с изменением частоты системы.
Реальная скорость асинхронного двигателя определяется следующим уравнением:
N = {N} _ {s} (1-s)
Хотя этот метод обычно не используется, его можно использовать, когда двигатель поддерживается внешним генератором (так что частота может быть просто изменена путем изменения скорости главного двигателя). Ток двигателя на более низкой частоте может увеличиваться в зависимости от значения реактивного сопротивления.И если частота повышается сверх стандартного значения, максимальный крутящий момент уменьшается, а скорость увеличивается.
В асинхронном двигателе ЭДС представлена индукцией, как в трансформаторе, которая определяется как
. E \ quad или \ quad V \ quad = \ quad 4.44 \ phi KTf \ quad или \ quad \ phi = \ frac {V} {4.44KTf}
В этом уравнении K — коэффициент обмотки, f — частота, а T — количество оборотов на фазу. Теперь, если мы изменим частоту, синхронная скорость также изменится, но с уменьшением частотного потока, и это изменение потока вызовет состояние насыщения в сердечниках ротора и статора.Следовательно, очень важно поддерживать постоянный поток, и это возможно только в том случае, если мы изменим напряжение. Таким образом, соотношение V / f должно оставаться постоянным. Это метод V / f. Мы должны подавать изменяемые напряжение и частоту для управления скоростью асинхронного двигателя методом V / f с использованием инвертора и преобразователя.
Постоянное управление асинхронным двигателем V / FЭто наиболее распространенное решение для управления скоростью асинхронного двигателя. Подобно описанному выше методу, если частота системы снижается при сохранении номинального напряжения источника, поток воздушного зазора будет насыщаться.Это вызовет дополнительный ток в статоре и искажение магнитного потока. Таким образом, напряжение статора должно уменьшаться с увеличением частоты, чтобы магнитный поток оставался постоянным.
Величина магнитного потока статора связана с напряжением статора и частотой системы. Таким образом, если скорость напряжения и частоты поддерживаются постоянными, магнитный поток также остается фиксированным. Развиваемый крутящий момент остается относительно постоянным, если V / F остается неизменным. Это решение обеспечивает большую эффективность во время выполнения. Таким образом, несколько типов скоростных приводов применяют режим постоянного напряжения / частоты (или переменную частоту на основе метода переменного напряжения) для управления скоростью асинхронного двигателя.Наряду с широким контролем скорости это решение также обеспечивает возможность плавного пуска.
Изменение количества полюсов статораПолюса статора можно изменять и проверять двумя способами, включая многосистемную обмотку (MSW) и модуляцию амплитуды полюса (PAM).
Метод с несколькими обмотками статораМы поставляем две разделенные обмотки для этого метода управления скоростью асинхронного двигателя в статоре. Эти две конкретные обмотки электрически разделены друг от друга и имеют два различных числа полюсов.Применение конфигурации переключения на одной обмотке может обеспечить возможность регулирования скорости. Это решение имеет ряд недостатков, в том числе отсутствие плавного регулирования скорости. Кроме того, этот способ слишком дорог и менее эффективен из-за использования двух разных обмоток.
Наконец, этот метод можно использовать только для двигателей с короткозамкнутым ротором. Можно видеть, что рабочая скорость может быть изменена изменением полюсов статора из приведенной выше формулы синхронной скорости. Таким образом, этот метод обычно используется для асинхронных двигателей с короткозамкнутым ротором, поскольку ротор этого типа самовосстанавливается для любого числа полюсов.Изменение полюсов статора обеспечивается двумя или более специальными обмотками статора, изолированными для различного количества полюсов в одних и тех же секциях.
Например, система снабжена двумя 3-фазными обмотками, одна на 6 полюсов, а другая на 8 полюсов, чтобы обеспечить частоту 60 Гц.
- i) можно рассчитать синхронную скорость по 6-полюсным обмоткам, Н с = 120 * 60/6 = 1200 об / мин
- ii) можно рассчитать синхронную скорость по 8-полюсным обмоткам, Н с = 120 * 60/8 = 900 об / мин
Первичная синусоидальная волна MMF чередуется с другой конкретной волной MMF, включая другое количество полюсов в этом методе управления скоростью асинхронного двигателя.
Предположим, что f 1 (θ) — это основная волна mmf асинхронного двигателя, скорость которой необходимо определить, f 2 (θ) — волна mmf модуляции, P 1 — количество полюсов системы, чья скорость должна отслеживаться, а P 2 — количество полюсов вторичной волны.
{f} _ {1} (\ theta) = {F} _ {1} sin \ frac {{P} _ {1} \ theta} {2}
{f} _ {2} (\ theta) = {F} _ {2} sin \ frac {{P} _ {2} \ theta} {2}
Итак, мы можем получить результирующую модуляцию mmf-волны как:
{F} _ {r} (\ theta) = {F} _ {1} {F} _ {2} sin \ frac {{P} _ {1} \ theta} {2} sin \ frac {{P } _ {2} \ theta} {2}
Применяя синусоидальную формулу, мы наконец получим результирующую волну mmf как:
{F} _ {r} (\ theta) = {F} _ {1} {F} _ {2} \ frac {cos \ frac {({P} _ {1} — {P} _ {2} ) \ theta} {2} -cos \ frac {({P} _ {1} + {P} _ {2}) \ theta} {2}} {2}
Это означает, что результирующая волна ммс будет включать два различных числа полюсов, т.е.е;
{P} _ {11} = {P} _ {1} — {P} _ {2} \ quad и \ quad {P} _ {12} = {P} _ {1} + {P} _ { 2}
Следовательно, изменяя количество полюсов, мы можем просто изменять скорость и регулировать скорость асинхронного двигателя.
Регулирование скорости асинхронного двигателя со стороны ротора Регулятор реостата ротораЭтот метод очень похож на управление шунтирующим двигателем постоянного тока с использованием реостата якоря.
Управление реостатом ротора (Ссылка: lectric4u.com )
Однако это решение возможно только для асинхронных двигателей с контактным кольцом и требует внешнего сопротивления в роторе, что невозможно для других двигателей.
Каскадный режимВ этом методе используются два двигателя для регулирования скорости асинхронного двигателя. Оба двигателя установлены на одном валу, поэтому оба работают с одинаковой скоростью. Один двигатель поддерживается трехфазным источником, а другой двигатель питается от наведенной ЭДС от первого двигателя с токосъемными кольцами.Их конфигурация представлена на следующей диаграмме.
Каскадная работа асинхронных двигателей (Ссылка: electricaleasy.com )
Если двигатель A предполагается в качестве основного двигателя, а двигатель B — в качестве вспомогательной системы, мы можем определить другие параметры следующим образом:
N s1 : частота системы A, N s2 : частота двигателя B, P 1 : количество полюсов статора системы A, P 2 : количество полюсов статора системы B, N : скорость системы, одинаковая для обоих двигателей, и f: частота источника питания.
Теперь мы можем определить скольжение двигателя A как:
{S} _ {1} = \ frac {{N} _ {S1} -N} {{N} _ {S1}}
Если частота создаваемой ротором ЭДС в системе A представлена как f1 = S 1 f, вспомогательная секция двигателя B поддерживается ЭДС, создаваемой в роторе, поэтому мы можем рассчитать скорость вторичной системы как:
{N} _ {S2} = \ frac {120 {f} _ {1}} {{P} _ {2}} = \ frac {120 {S} _ {f1}} {{P} _ {2 }}
Теперь мы можем положить значение S 1 следующим образом и получить окончательное уравнение
{S} _ {1} = \ frac {{N} _ {S1} — {N}} {{N} _ {S1}}
Так;
{N} _ {S2} = \ frac {120f ({N} _ {S1} -N)} {{P} _ {2} {N} _ {S1}}
При нулевой нагрузке скорость вспомогательной части ротора равна синхронной скорости и N = N с2 .Итак, из последних уравнений можно получить, что
{N} = \ frac {120f} {{{P} _ {1} + P} _ {2}}
С помощью этого решения можно обеспечить четыре конкретных скорости, а именно:
- a) когда работает только система A, соответствующая скорость = N с1 = 120f / P 1
- b) когда работает только система B, соответствующая скорость = N с2 = 120f / P 2
- c) При применении метода коммутативного каскадирования скорость системы = N = 120f / (P 1 + P 2 )
- d) При использовании метода дифференциального каскадирования скорость системы = N = 120f (P 1 — P 2 )
В этом методе управление скоростью асинхронного двигателя осуществляется путем подачи определенного напряжения на диаграмму ротора.Введенное напряжение (ЭДС) должно иметь частоту, равную частоте скольжения. Однако нет никаких ограничений для фазы этой ЭДС. Если введенная ЭДС имеет противоположную фазу с ротором, сопротивление системы улучшится. В противном случае, если подаваемое напряжение имеет ту же фазу, что и ротор, сопротивление уменьшится. В результате, изменяя фазу подаваемого напряжения, можно правильно применять управление скоростью асинхронного двигателя.
Метод впрыска ЭДС (Ссылка: circuitglobe.com)
Основным преимуществом этого решения является возможность широкого управления скоростью. Эта конкретная ЭДС может быть введена в систему с помощью различных шагов, таких как система Крамера, система Шербиуса и т. Д.
(PDF) ОБЗОР МЕТОДОВ УПРАВЛЕНИЯ СКОРОСТЬЮ ИНДУКЦИОННЫХ ДВИГАТЕЛЕЙ
ISSN: 2348 9510
International Journal Of Core Engineering & Management (IJCEM)
Volume 3, Issue 5, August 2016
123
Интерфейс, преобразующий Кульминация нечеткого вывода в фактические входные данные для системы
называется дефаззификацией.В основном дефаззификация дает значительный результат в виде четкой логики
, основанной на соответствующих функциях принадлежности и нечетких наборах.
IV. ЗАКЛЮЧЕНИЕ
В этой статье рассмотрены возникновение и развитие методов управления скоростью, а также анализ их эффективности
на асинхронном двигателе. Сначала внимательно рассмотрены основные принципы регулирования скорости и произведено сравнение
. Позже показаны различные современные технологии и методически рассмотрены разработки
.Наконец, был сделан вывод, что за счет применения современного интеллектуального метода, такого как нечеткая логика
, улучшаются динамические характеристики двигателя, уменьшаются пульсации крутящего момента и магнитного потока статора.
БЛАГОДАРНОСТЬ
Авторы выражают признательность за поддержку, оказанную Universiti Tenaga Nasional и всем лицам
, которые прямо или косвенно участвуют в этой работе.
СПИСОК ЛИТЕРАТУРЫ
[1] Буя, Г., Касадей, Д. и Серра, Г. 1997. Прямое управление крутящим моментом асинхронных двигателей.IEEE Trans. Инд.
Заявл. Номер каталога 97TH8280, стр.130-137.
[2] Депенброк М. 1987. Прямое саморегулирование (DSC) индукционной машины с питанием от инвертора. IEEE Trans. Мощность
Elec. 3: 420-429.
[3] Guohanin, Xu, Z. 2010. Прямое управление крутящим моментом асинхронного двигателя на основе нечеткой логики. Proc. из
Int. Конф. на компьютере Engg. Technol. Vol. 4. С. 651-654.
[4] В. И. Ибрагим, М. Т. Раджа, Исмаил, М. Р. Газ Али, «Разработка привода с регулируемой скоростью для однофазного асинхронного двигателя
на основе управления частотой»,
[5] Mr.Аунг Зау Латт, д-р Ни Ни Вин, «Привод с регулируемой скоростью однофазного асинхронного двигателя с использованием метода управления частотой
», Международная конференция по образовательным технологиям и компьютерам, 2009 г.
[6] Д.С. Хендерсон, «Электроприводы с регулируемой скоростью. — Характеристики и применение Регулируемая частота
Основы управления (инверторы), рассмотрение применения », Бюллетень C870A.
[7] Теодор Вилиди, 1997 год. Электроприводы и энергосистема Prentice Hall, Inc.
[8] Фарзан Рашиди, «Бездатчиковое управление скоростью асинхронных двигателей с использованием надежного и адаптивного контроллера
Нечеткий нейро-логический контроллер», Международная конференция IEEE по промышленным технологиям (ICIT),
2004
Низкий- Мониторинг скорости и управление трехфазным асинхронным двигателем с учетом затрат с помощью подхода управления напряжением / частотой
В этой статье рассматривается новая конструкция недорогого мониторинга скорости в реальном времени и управления трехфазным асинхронным двигателем с обратной связью ( IM) предлагается.Предлагаемое решение основано на подходе к регулированию напряжения / частоты (V / F) и на ПИ-регуляторе, предотвращающем всплеск. Он использует набор Waijung Blockset, который значительно снижает тяжесть и сложность задачи программирования микроконтроллера, которая постоянно имеет решающее значение для реализации и управления такими сложными приложениями. Действительно, он автоматически генерирует коды C для многих типов микроконтроллеров, таких как семейство STM32F4, также используемых в этом приложении. Кроме того, он предлагает экономичную конструкцию, сокращающую количество компонентов системы и повышающую ее эффективность.Для того, чтобы доказать эффективность предложенной конструкции, не только результаты моделирования выполняются в широком диапазоне изменения нагрузки и задания скорости, но и экспериментальной оценки. Эффективность управления в реальном времени с обратной связью доказана с использованием сервера данных aMG SQLite через плату порта UART, тогда как Waijung WebPage Designer (W2D) используется для задачи веб-мониторинга. Результаты экспериментов подтверждают точность и надежность предложенного решения.
1. Введение
В последние десятилетия приводы с асинхронными двигателями (IM) становятся все более популярными в промышленных приложениях, а также в бытовой технике благодаря своей надежности, низкой стоимости, прочности, простоте обслуживания и простоте. управления [1–3].
Методы управления IM в основном подразделяются на два основных класса: скалярное управление и подходы векторного управления [4–6]. Скалярное управление, широко известное как управление напряжением / частотой (V / F), рассматривается как простой подход, основанный на управлении амплитудой и частотой напряжения питания. Для косвенного управления скоростью IM используется трехфазный инвертор источника напряжения (VSI), управляемый методом широтно-импульсной модуляции (PWM). Однако, несмотря на простоту реализации, скалярные методы управления не могут достичь наилучших характеристик во время переходных процессов, что считается основным недостатком [1, 7, 8].
Подходы с векторным управлением, также известные как подходы с ориентированным на поле (FOC) подходы, позволяют управлять не только амплитудой и частотой напряжения, как это имеет место для скалярных подходов управления, но также и мгновенным положением потока, векторы напряжения и векторы тока [9, 10]. Они рассматриваются как подходы, основанные на математических моделях. Особенно в переходном режиме они гарантируют лучшие характеристики управления по сравнению со скалярными подходами к управлению. К сожалению, такие методы управления имеют сложные алгоритмы и требуют много вычислительного времени [11–13].
Поскольку простота алгоритма управления представляет большой интерес для пользователей, скалярный подход управления по-прежнему считается наиболее используемым в промышленных приложениях, особенно когда точность отклика скорости в переходном режиме не является обязательной, например, для вентиляции. и системы кондиционирования воздуха, а также системы отопления и откачки [13–15]. Целью этих методов является управление скоростью АД путем поддержания постоянного магнитного потока статора. Величина потока статора пропорциональна отношению между напряжением статора и частотой.Однако, если это соотношение остается постоянным, поток остается постоянным. Кроме того, при поддержании постоянного V / F развиваемый крутящий момент остается приблизительно постоянным. Этот метод дает более высокую оперативную эффективность [16, 17]. Поэтому в большинстве скоростных приводов переменного тока (ACSD) для управления скоростью используется метод постоянного напряжения / частоты. Наряду с широким диапазоном регулирования скорости этот метод также предлагает возможность «плавного пуска» [18, 19].
Напротив, большой прогресс в области микроконтроллеров и силовых электронных компонентов стал важным фактором в обработке приводов с регулируемой скоростью [20–22].Например, семейство микроконтроллеров STM32F4 предлагает высококачественные характеристики при обслуживании высокопроизводительных приводов с регулируемой скоростью. Программирование микроконтроллеров для таких тяжелых и сложных приложений с использованием традиционных языков (таких как ассемблер, языки C или C ++) увеличивает время масштабирования таких приложений. Кроме того, это требует наличия эксперта в области компьютерного программирования с глубокими знаниями архитектуры процессора. Кроме того, чтобы снизить эксплуатационные расходы и повысить надежность и безопасность предлагаемой конструкции, промышленные приложения должны контролироваться в режиме реального времени, что обеспечивает идеальный контроль и наблюдение за системой.Следовательно, мониторинг в реальном времени стал основной задачей для инженеров и исследователей в промышленных приложениях, таких как насосная, горнодобывающая промышленность, железные дороги и промышленные приводы. [23–25].
В этой работе мы предлагаем новую конструкцию недорогой системы контроля скорости и управления трехфазным асинхронным двигателем в режиме реального времени. Система управления, работающая в соответствии с правилом постоянной V / F, разработана с использованием VSI на основе метода пространственно-векторной широтно-импульсной модуляции (SVPWM) и трехфазного IM, нагруженного магнитным силовым выключателем.Вайджунг также предназначен для решения этой проблемы. Это набор блоков Simulink, который можно использовать в качестве целей для простой и автоматической генерации кода C из имитационных моделей Matlab / Simulink для микроконтроллера STM32F4 Discovery. Мониторинг скорости в реальном времени и управление предложенным алгоритмом осуществляется двумя разными способами. Первый основан на порте COM / UART и конвертере USB, а второй использует Waijung WebPage Designer (W2D). Оборудование, необходимое для этого приложения, сгруппировано как MG Labkit F4N, подходящее для многих промышленных приложений.Насколько нам известно, такие решения никогда ранее не тестировались для ACSD, несмотря на важность решения. Кроме того, оценка эффективности предлагаемого алгоритма будет проверяться не только с помощью результатов компьютерного моделирования, но и с помощью экспериментальной оценки для широкого диапазона вариаций нагрузки и опорной скорость.
Эта статья имеет следующую структуру. В разделе 2 представлена математическая модель трехфазного АД и соответствующей приводной системы. Раздел 3 представляет разработанный подход скалярного управления для управления IM с обратной связью.В разделе 4 эффективность предложенного подхода доказывается результатами моделирования. Наконец, в разделе 5 расширены экспериментальные результаты для различных сценариев.
2. Математическое моделирование процессов
2.1. Асинхронный двигатель
Электрическая машина, рассматриваемая в этой статье, представляет собой трехфазную асинхронную машину с короткозамкнутым ротором. Основные электрические уравнения в стационарной системе отсчета могут быть записаны в следующей форме [7–9]:
В предыдущей системе уравнений — вектор напряжения статора на фазу, а и представляют поток статора / ротора, соответственно.Токи статора / ротора обозначены и. и — сопротивления статора / ротора соответственно. и — индуктивность рассеяния и соотношение между взаимной индуктивностью и индуктивностью ротора соответственно. Электрическая скорость и количество пар полюсов обозначены и соответственно. Для расчета электромагнитного момента можно использовать различные выражения. Наиболее часто используемое соотношение описывается уравнением (4), где — коэффициент вязкости, — момент инерции, — момент нагрузки.
2.2. Привод с асинхронным двигателем
На рис. 1 показана связь между трехфазным преобразователем напряжения и IM. Силовая цепь преобразователя в основном состоит из трех модулей, а именно, трехфазного выпрямителя, конденсатора фильтра переменного / постоянного тока и трехфазного инвертора, при этом D 1 –D 6 являются трехфазным выпрямителем. диодная цепь, C — шина постоянного тока конденсатора фильтра, а C 1 –C 6 — переключатели питания. Инвертор с трехфазным источником, задачей которого является обеспечение переменного напряжения и переменной частоты на выходе посредством управления широтно-импульсной модуляцией (ШИМ), управляет IM [26].Для генерации команды сигнала для инвертора напряжения можно использовать несколько методов ШИМ [13, 15, 19]. В этой работе мы используем технику SVPWM.
2.3. Метод пространственно-векторной широтно-импульсной модуляции
Рассматривая трехфазный инвертор без потерь, выходное напряжение получается в соответствии с напряжением шины постоянного тока Vdc и логическим состоянием трех высших переключателей (C1, C2, C3). Таким образом, существует восемь возможных логических комбинаций (C1, C2, C3), приводящих к шести векторам активного напряжения и двум векторам нулевого напряжения.Пространственный вектор выходного напряжения инвертора можно выразить следующим выражением: где k, — целое число, указывающее комбинации переключения [13, 26]. В комплексной плоскости dq различные векторы напряжения, подаваемые инвертором, и соответствующие комбинации переключателей C1, C2 и C3 показаны на рисунке 2.
Цель SVPWM — создать вектор среднего напряжения во время PWM. период, равный желаемому вектору напряжения. Это делается путем применения соседних векторов в течение заданного времени, в течение заданного времени и нулевого вектора или в течение необходимого количества времени.Таким образом, чтобы получить среднее значение, равное за период, мы должны иметь следующее соотношение:
Значения, и могут быть вычислены с использованием следующих уравнений: где коэффициент обозначает отношение напряжений.
Для соблюдения условия модуль запрошенного напряжения должен проверить следующее условие:
Здесь следует отметить, что условие, данное условием (6), относящееся к выполнимости синтеза, устанавливается путем рассмотрения вектора напряжения в системе отсчета Concordia, что означает, что используемая величина соответствует либо умноженному на среднеквадратичное значение, либо умноженному на максимальное значение в естественной системе.
3. Дизайн скалярного управления
Методология скалярного управления фокусируется только на динамике установившегося состояния, позволяет регулировать напряжение питания, а также его частоту так, чтобы их соотношение оставалось постоянным, чтобы избежать насыщения магнитного потока, и влияет на доступный крутящий момент машины [7, 8]. Исходя из уравнения (1) и предполагая, что падение напряжения на сопротивлении статора мало по сравнению с напряжением статора в основном в областях с низким скольжением, поток статора можно выразить как [12, 16] где — величина напряжения статора и — частота питающей сети (Гц).Электромагнитная характеристика проскальзывания крутящего момента в стационарном режиме имеет следующий вид [6]: где — скольжение, и представляют собой сопротивление ротора и полное реактивное сопротивление утечки, расположенные в роторе, соответственно.
В области малого скольжения (нормальные рабочие условия) приведенное выше уравнение упрощается до
Это означает, что, если поток статора поддерживается постоянным, изменение крутящего момента как функция скольжения почти линейно.
Регулировка частоты естественна для приводов с регулируемой скоростью.Однако требуется, чтобы напряжение было пропорционально частоте, чтобы поток статора оставался постоянным, если сопротивлением статора пренебречь. V / F-управление без обратной связи IM является одним из наиболее распространенных методов, широко используемых в промышленности из-за его простоты, низкой стоимости и производительности [27]. Поскольку скорость ротора будет немного меньше синхронной скорости из-за скорости скольжения, скорость двигателя нельзя точно контролировать. Кроме того, поскольку скорость ротора в этой схеме не измеряется, пульсация скольжения не может поддерживаться.Следовательно, может иметь место работа в нестабильной области характеристики крутящий момент-скорость. Точно так же токи статора могут значительно превышать номинальный ток под действием упомянутой выше точки и, таким образом, подвергать опасности комбинированную инверторную машину. Эти недостатки должны быть решены путем создания внешнего контура управления в приводе IM, где фактическая скорость ротора должна сравниваться с эталонным значением, и, следовательно, возникает ошибка между этими переменными [16–18]. Эта ошибка обрабатывается с помощью ПИ-регулятора и ограничителя для получения команды скольжения-скорости.Команда частоты инвертора генерируется путем добавления команды скольжения и сигнала фактической скорости, а команда частоты генерирует команду напряжения или его соотношение напряжений через функциональный генератор вольт / герц. Полученные и применяются к двигателю с помощью SVPWM-VSI.
При работе на малой скорости падением напряжения на сопротивлении статора нельзя пренебречь по сравнению с падением реактивного сопротивления утечки. И наоборот, при работе на скорости, большей, чем соответствующая номинальной частоте, происходит ослабление магнитного поля.Чтобы избежать этих аномалий, структура управления U / F должна учитывать падение напряжения на сопротивлении на низкой скорости, чтобы поддерживать постоянный поток статора, и должна ограничивать напряжение при достижении номинальной частоты. Затем входное напряжение регулируется в соответствии с частотой, необходимой для конкретного задания скорости, как показано в следующем уравнении [12, 16, 21]:
Схема управления IM с регулируемым напряжением и скольжением показана на рисунке. 3.
Для повышения производительности обычного скалярного управления используется антивибрационный ПИ-регулятор.ПИ-регулятор, предотвращающий зависание, является усовершенствованием классического ПИ-регулирования. Стратегия защиты от закручивания используется для предотвращения перехода контроллера в состояние глубокого насыщения и проверки выходных данных контроллера при больших изменениях уставки. Это помогает предотвратить чрезмерный выброс во время запуска IM и гарантирует желаемую производительность независимо от условий эксплуатации, то есть от опорных колебаний и моментов нагрузки [8, 20]. На рисунке 4 показана блок-схема ПИ-регулятора, где разница между выходным значением и входным значением блока насыщения используется в качестве сигнала обратной связи через коэффициент усиления (1 / Tt) для пересылки входного сигнала интегратору.
4. Результаты моделирования
Чтобы проанализировать и проверить характеристики предлагаемого решения, методология управления, показанная на рисунке 3, выполняется с использованием программного обеспечения MATLAB / Simulink для технических характеристик IM, которое приведено в таблице 1 Результаты моделирования приведены для различных условий эксплуатации. Два основных сценария приведены здесь: скорость отклика при изменении амбразура крутящего момента нагрузки и скорости реакции при изменении амбразура задания скорости.Время выборки, используемое во всем моделировании, составляет 100 мк с.
| ||||||||||||||||||||||||
4.1. Сценарий 1: Отклик скорости при изменениях крутящего момента под нагрузкой Кренеля
В этом испытании используется эталонный сигнал 150 рад / с, который равен номинальной скорости. Изменение крутящего момента нагрузки происходит от нуля до номинального крутящего момента: 0 — 5 с, 3 Нм — 10 с, 6,82 Нм — 20 с, 3 Нм — 30 с и 0 — 40 с. На рисунках 5–9 представлены полученные результаты моделирования. Эти рисунки показывают, что предложенный алгоритм работает идеально, а ПИ-регулятор, предотвращающий вспучивание, обеспечивает наилучший отклик.На рис. 5 показано, что характеристика скорости совпадает с эталонной. Это подтверждается рис. 6, показывающим увеличенное изображение на рис. 5. Отклик по скорости практически идеален, без перерегулирования и незначительной задержки. На рисунках 7 и 8 показан отклик напряжения статора. Отношение напряжения изменяется в зависимости от исходной скорости и пропорциональна пульсации статора проверочной, что поток является постоянным в качестве основного свойства скалярного управления. На рисунке 9 показаны пульсации статора и ротора и подтверждается, что пульсация скольжения (разница между пульсациями статора и ротора) пропорциональна крутящему моменту нагрузки, как упоминалось ранее в уравнениях (10) и (11).На рисунке 9 пульсация скольжения находится в диапазоне от 0 (без нагрузки) до 30 рад / с (в номинальном рабочем состоянии).
4.2. Сценарий 2: Скорость отклик в соответствии с вариациями задания скорости
Этого моделированием тест выполняет Эффекты вариаций ссылки на регуляторе скорости. На рисунке 10 представлены отклик скорости вращения ротора при изменении исходной скорости амбразуры начиная с 0, а затем 100, 120, 157, 150 и 80, и возвращаются к 0 рад / с.На Рисунке 10 скорость ротора полностью соответствует эталонной. ИД работает без нагрузки; таким образом, пульсации статора и ротора равны, поэтому скольжение равно нулю. На рисунке 11 показано напряжение статора в виде его отношения. Здесь легко проверить, что постоянная V / F подтверждается, потому что траектории пульсаций напряжения статора имеют одинаковую форму.
5. Экспериментальная проверка
В этом разделе экспериментальные результаты, связанные с мониторингом и контролем скорости IM в реальном времени, будут выполнены с помощью двух методов связи.Для первого связь осуществляется через порт UART, а для второго используется Waijung WebPage Designer (W2D). Кроме того, для каждого метода экспериментальные результаты выполняются для двух сценариев, рассмотренных в результатах моделирования.
Испытательный стенд [28], используемый для проверки, построен на основе обнаружения STM32F4 на основе AMG labkit F4. AMG Labkit F4 [29] состоит из недорогого высокопроизводительного оборудования DSP с различными модулями Plug-n-Play. Этот набор поддерживается набором инструментов Matlab / Simulink с Waijung Blockset и Waijung WebPage Designer (веб-мониторинг и управление с помощью перетаскивания) [30].На фотографии на Рисунке 12 показаны основные аппаратные компоненты, используемые в нашем приложении, включая следующее: (i) aMG F4 Connect 2 в качестве щита для включения различных дополнительных плат расширения, указанных ниже (ii) aMG SQLite Database Server для встроенной базы данных. (iii) aMG USB Converter-N2 (адаптер Converter-N) для оборудования реального времени в моделировании контура (iv) aMG Ethernet INF для интерфейса LAN (v) aMG CAN INF для интерфейса CAN-шины (vi) STM32F4 DISCOVERY Kit который представляет собой недорогой комплект разработчика от STMicroelectronics
Общий тестовый стенд показан на рисунке 13.Кроме того, он включает в себя следующее: (i) короткозамкнутый IM с параметрами, приведенными в таблице 1. (ii) магнитный порошковый прерыватель в качестве нагрузки для IM. (Iii) инкрементальный энкодер Omron, имеющий 360 импульсов на оборот, связанный с вал машины. (iv) Преобразователь Semikron на основе трехфазного выпрямителя, фильтра шины постоянного тока и трехфазного инвертора. Инвертор используется для управления IM. (V) 2-канальный аналоговый осциллограф с полосой пропускания 20 МГц для визуализации. (Vi) Датчики для измерения тока и напряжения, типы LEM LA25-NP и LEM LV25-P, соответственно.
Микроконтроллер ST TM32F4VG407 Контроллер Discovery генерирует основную программу. Он обеспечивает измерение скорости ротора с помощью инкрементального энкодера, достижение алгоритма управления (V / F), включая ПИ-регулятор, препятствующего сворачиванию, и генерацию сигнала ШИМ с пространственной векторной модуляцией для активации шести биполярных транзисторов с изолированным затвором (IGBT) трехфазный инвертор. Результаты экспериментов записываются с временем выборки 100 мкс.
5.1. Результаты экспериментов через порт связи UART
В качестве аппаратных модулей, используемых здесь, являются aMG USB Converter-N и плата aMG SQLite Data Server.Два кода, сгенерированные Simulink, созданы для достижения скалярного алгоритма управления IM, которые являются целевым и хост-кодами. Целевой код, сгенерированный Simulink STM32F4, показанный на рисунке 14, позволяет считывать информацию инкрементного энкодера (скорость ротора) для входа ПИ-регулятора. Он заставляет фактическую скорость достигать эталонного значения. Он генерирует сигналы ШИМ с использованием метода симметричного SVPWM. На рисунке 14 показано, что есть две части: набор блоков Waijung (зеленый цвет) и разработанный код (голубой цвет).Здесь используются следующие наборы блоков Waijung: (i) Блок настройки UART для STM32F4 DISCOVERY + aMG F4 Connect 2 + использование настройки преобразователя USB aMG USB-N2 (настройка скорости передачи UART3 5000000 Pin D8 / D9 для Tx / Rx). блок, используемый для настройки STM32F4 в модели Simulink. (iii) UART Rx и Tx принимают и отправляют информацию UART из / в хост-программу (через aMG USB connect 2 и USB-конвертер N2). (iv) Базовый PWM использует время 1 для генерации 3 активные высокие сигналы ШИМ (v) Чтение энкодера использует встроенный таймер STM32F4 для интерпретации данных энкодера.Однако целевая модель позволяет считывать каналы A и B кодировщика с помощью выводов B4 и B5, соответственно, а также выводить позицию кодировщика и считать как пакет двоичных данных через вывод D8 настройки UART.
Сгенерированные программы касаются инкрементального энкодера, симметричного SVPWM и ПИ-регулятора защиты от сворачивания. На рисунке 15 показан код энкодера, разработанный для считывания информации с инкрементального энкодера и преобразования ее в угловую скорость. На рисунке 16 показан разработанный код Simulink для настройки Таймера 1 для генерации 3 активных высоких сигналов ШИМ с периодом 100 мкс (10 кГц) на выводы E9, E11 и E13 с процентным соотношением рабочего цикла Ra, Rb и Rc соответственно.На рисунке 17 показан код, сгенерированный Simulink ПИ-контроллером, который будет использоваться в ПИ-контроллере антивиндуп.
Код Simulink STM32F4 хоста показан на рисунке 18. Эта модель сконфигурирована с использованием трех наборов блоков Waijung для отправки изменений заданных значений скорости, а полученный пакет двоичных данных отображается в реальном времени как дисплей и график внутри порта COM / UART и канала аппаратного компонента AMG Converter-N2 (преобразователь USB-UART) D .
Производительность и точность спроектированного управления скоростью в реальном времени IM проверяются по двум сценариям: первый сценарий выполняется при ступенчатом изменении задания скорости, где второй сценарий выполняется при ступенчатом изменении нагрузки. крутящий момент при постоянной исходной скорости.
5.1.1. Сценарий 1: Изменение эталонной скорости
Этот тест проводится для подтверждения правильности и хорошей работы антивибрационного контроллера, несмотря на большое изменение эталонной скорости. Вариация задание скорости crenels в рад / с применяют от нуля, то 100, 120, 157, 150 и 80, и, наконец, нулю. ИД здесь работает без нагрузки. Рисунок 19 доказывает, что измеренная скорость идеально соответствует эталону, а время отклика для каждого изменения не превышает 2 с без перерегулирования.Это означает, что контроллер antiwindup работает безупречно, и вся программа хорошо спроектирована для высокопроизводительного скоростного привода IM.
Поскольку IM не находится под нагрузкой, пульсация скольжения равна нулю, а пульсации статора и ротора равны. Это подтверждается рис. 20, показывающим реакцию пульсации статора ω s и отмеченную здесь скорость ротора ω r для вышеупомянутого сценария. Пульсации статора изменяется параллельно опорной скорости ω исх и пропорциональности с напряжением статора для поддержания постоянной V / F.Это правило подтверждается фиг.21, что напряжение соотношение варьирует от 65% для эталонной скорости 100 рад / с, 78% для 120 рад / с, 100% в течение 157 рад / с (синхронной скорости), 98% за 150 рад / с, и 52% для 80 рад / с.
5.1.2. Сценарий 2: изменение крутящего момента нагрузки
В этой серии испытаний используется номинальная эталонная скорость 150 рад / с при ступенчатом изменении крутящего момента нагрузки. На рисунке 22 представлена реакция скорости ротора, когда IM приводится в действие в режиме скалярного управления с обратной связью.Этот рисунок демонстрирует, что для большого изменения крутящего момента нагрузки четырех зубцов, как в испытаниях с моделированием (0, 3, 6,82, 3 и 0 Нм), измеренная скорость поддерживается постоянной, близкой к эталонной. На Рисунке 23 представлено уменьшенное изображение. На Рисунке 22 в устойчивом режиме работы показано, что перерегулирование не превышает 2,6%, а время установления менее 2 с в номинальном режиме. Такие характеристики доказывают, что регулятор защиты от сворачивания PI работает правильно, а его параметры Ki и Kp хорошо спроектированы. Кроме того, доказана тонкая согласованность между сгенерированными кодами Simulink и целевым набором блоков Waijung для STM32F4 Discovery.Кроме того, более эффективное использование Waijung Blockset в приложениях для управления электрическими машинами.
Пригодность управления V / F для IM хорошо подтверждается рисунками 24–27. Возвращаясь к уравнениям (11) и (12), согласно которым электромагнитный момент пропорционален квадрату напряжения статора и его частоты, эти свойства объясняют, почему соотношение напряжений и пульсации статора увеличиваются и уменьшаются параллельно с моментом нагрузки, чтобы поддерживать скорость ротора. постоянный.Реакция отношения напряжений в реальном времени показана на рисунке 24. Увеличенный масштаб этого рисунка, рисунок 25, доказывает, что отношение изменяется от 96,5% до 100% в зависимости от крутящего момента нагрузки по уравнению (12) (100% в номинальном режиме работы). Эталонная пульсация статора, используемая для расчета напряжения статора в соответствии с уравнением (12), показана на рисунке 26. Увеличение последнего рисунка на рисунке 27 означает, что такая пульсация изменяется от 300 рад / с без момента нагрузки до 331. рад / с в номинальном рабочем режиме.Разница между пульсацией статора и ротора представляет собой пульсацию скольжения, которая пропорциональна крутящему моменту (описываемому уравнением (11)) и доказывает хорошее регулирование переменной скорости. Очевидно, что все полученные экспериментальные результаты невероятно близки к результатам моделирования. Этот вывод доказывает правильность и точность реализации в реальном времени предложенного аппаратного / программного решения для управления скоростью.
5.2. Результаты экспериментов с помощью Waijung WebPage Designer
Waijung WebPage Designer (W2D) — это набор веб-инструментов, предназначенных для приложений, требующих мониторинга и управления в Интернете более простым и быстрым способом с использованием оборудования Waijung Blockset и Aimagin. Другими словами, W2D — это компиляция веб-инструментов, таких как HTML5, CSS, Javascript, JSON, jQuery, jQuery Mobile, SQLite, AJAX и stream. В системе также представлены методы автоматического и ручного управления для остановки или запуска индукционной машины, чтобы избежать сбоев системы.Требования к оборудованию для этого приложения цитируются следующим образом: (i) STM32F4DISCOVERY (ii) aMG F4 Connect 2 + карта Micro SD (iii) aMG Ethernet INF (iv) сервер базы данных aMG SQLite + карта Micro SD
Карта Micro SD должна быть не менее 4 ГБ, чтобы обеспечить скорость передачи данных, достаточно высокую для связи с MCU.
Модель Simulink / Matlab, используемая для веб-мониторинга и управления скоростью IM в режиме замкнутого цикла, показана на рисунке 28. В дополнение к основным предыдущим программам (Encoder, SVPWM, PI-контроллер и основная настройка цели) она содержит настройки блоки для W2D.Внутри подсистемы настройки W2D (белый цвет) она сгруппирована в пять блоков настройки. (I) Настройка веб-сервера состоит из трех блоков: настройка канала Ethernet, настройка приложения Ethernet и настройка сервера Http (ii) Настройка UART использует модуль 6 UART для Tx / Rx (для связи с модулем сервера базы данных SQLite aMG) (iii) Настройка базы данных SQLite использует порт UART6 (интерфейс с сервером базы данных SQLite MG)
Энергозависимое хранилище данных (оранжевый цвет) используется для хранения данных для другого использования модели. Значения, хранящиеся в хранилище данных, отображаются для доступа в Интернет.Отображаемые переменные устанавливаются в режим «Только чтение» или «Запись / чтение». Запрос к базе данных SQLite (желтый цвет) настроен для связи между веб-интерфейсом и системой веб-серверов.
Используя инструмент Waijung WebPage Designer (W2D), мы создали веб-интерфейс для мониторинга значений (скорость ротора Wr, скорость статора Ws и коэффициент напряжения RO) на веб-сервере MCU и отображения в веб-браузере как текстовых и цифровых значений, Ws , Wr и Ro. На рисунке 29 показан наглядный пример результатов в Интернете. Значение скорости ротора выделено красным цветом, а коэффициент напряжения и пульсация статора представлены синим и желтым цветом соответственно.Цель здесь — выявить научную и технологическую осуществимость веб-мониторинга и управления, поскольку производительность алгоритма проверена в предыдущей части. Мы приложили к этому документу видеоролик, в котором резюмируются эти экспериментальные результаты.
6. Заключение
В этой работе представлен технический подход к мониторингу и контролю скорости IM, управляемой V / F-управлением, и осуществляется посредством моделирования и экспериментальных результатов с использованием Waijung Blockset и оборудования AMG вокруг Плата обнаружения STM32F4.
Предлагаемая структура управления усилена твердым антивибрационным ПИ-регулятором и поддерживается объединением STM32F4-Waijung Blockset, который представляет собой идеальную и многообещающую платформу для многих промышленных приложений благодаря быстрому и простому прототипированию и недорогой конструкции. . Пожалуйста, подтвердите, что это ваше предполагаемое значение. Действительно, это не только исключает использование датчиков напряжения и тока, но также исключает использование жестких языков программирования. Ориентировочная стоимость всей установки (аппаратные компоненты STM32F4 и Aimagin) не превышает 400 долларов США, в то время как ориентировочная стоимость аналогичного прототипа с использованием, например, dSPACE 1104, например, превышает 12000 долларов США.
Моделирование и экспериментальные испытания, проведенные для изменения задания скорости и момента нагрузки, доказывают надежность предложенного решения, в котором ПИ-регулятор обеспечивает превосходный отклик даже в тяжелых режимах работы.
Доступность данных
Данные, использованные для подтверждения результатов этого исследования, включены в статью.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Благодарности
Финансирование этой работы было предоставлено исследовательской лабораторией ERCO (Энергетика, управление и оптимизация робототехники) Национального института прикладных наук и технологий (INSAT) Туниса, Тунис.
Управление скоростью асинхронного двигателя с помощью микроконтроллера pic
Регулировка скорости трехфазного асинхронного двигателя
Регулировка скорости трехфазного асинхронного двигателя с помощью микроконтроллера pic18 Статья поможет вам разработать свой проект. Трехфазные асинхронные двигатели очень популярны в промышленности, бытовой технике и тяжелой промышленности. Трехфазные асинхронные двигатели в основном используются в приложениях, основанных на движении. Трехфазные асинхронные двигатели прочны и надежны в приложениях, основанных на движении.Асинхронные двигатели работают с определенной скоростью, когда на асинхронный двигатель подается питание. Но главная проблема — это контроль скорости асинхронного двигателя. Эта техническая статья поможет вам разработать драйвер переменной скорости для асинхронного двигателя с использованием микроконтроллера pic.
Последние разработки в области силовой электроники сделали управление скоростью асинхронного двигателя очень простым. Силовая электроника улучшила динамические и установившиеся характеристики асинхронного двигателя. Например, в домашней стиральной машине необходимо контролировать скорость на разных этапах стирки.Это тоже домашнее применение асинхронного двигателя.
Методы регулирования скорости асинхронного двигателя
Регулирование скорости асинхронного двигателя очень сложно из-за его нелинейных характеристик. В основном используются три метода управления скоростью асинхронного двигателя:
- Метод контроля напряжения
- Метод переменного напряжения и переменной частоты (VVVF) (этот метод используется в приложениях с разомкнутым контуром). Это может быть реализовано с помощью микроконтроллеров pic с низким энергопотреблением.
Считывая номинальное напряжение и номинальную частоту асинхронного двигателя с его паспортной таблички, вы можете получить представление о скорости асинхронного двигателя в об / мин.
Типы асинхронных двигателей
По конструкции ротора асинхронные двигатели бывают двух типов: асинхронные двигатели с короткозамкнутым ротором и двигатели с фазным ротором. Статор у обоих двигателей практически одинаковый.
- Двигатель с короткозамкнутым ротором: В основном асинхронные двигатели, используемые в промышленности и быту, относятся к типу с короткозамкнутым ротором. Это потому, что они имеют простую прочную конструкцию.
- Асинхронные двигатели с контактным кольцом: Контактные кольца, установленные на валу двигателя, являются основным отличием между контактным кольцом и двигателями с короткозамкнутым ротором.
Как управлять скоростью асинхронного двигателя
Управление скоростью асинхронного двигателя осуществляется двумя способами, о которых я упоминал ранее в этой статье. Но самый популярный метод — это переменное напряжение и переменная частота (ВВВФ). В этом методе трехфазное переменное напряжение преобразуется в постоянное с использованием схемы трехфазного диодного мостового выпрямителя. Конденсаторная батарея используется для фильтрации пульсаций переменного тока для постоянного напряжения. Это постоянное напряжение преобразуется обратно в трехфазный переменный ток переменного напряжения и переменной частоты с помощью H-моста, как показано на рисунке ниже:
Схема выше представляет собой трехфазный мост H инвертора источника напряжения.Он состоит из шести переключателей, управление которыми осуществляется с помощью ШИМ, генерируемого микроконтроллером PIC.
Управление скоростью асинхронного двигателя с помощью блок-схемы микроконтроллера pic
Блок-схема управления скоростью трехфазного асинхронного двигателя приведена ниже. Потенциометр, подключенный к АЦП микроконтроллера PIC, используется для регулировки скорости асинхронного двигателя. Микроконтроллер PIC считывает значение потенциометра и устанавливает новую скорость асинхронного двигателя, изменяя опорную частоту асинхронного двигателя.
Трехфазный диодный мостовой выпрямитель преобразует переменный ток в постоянный. Трехфазный инвертор напряжения преобразует постоянный ток в переменный на основе сигнала ШИМ-контроллера от микроконтроллера PIC. Схема драйвера IGBT или MOSFET используется для управления полевыми МОП-транзисторами с минимальным временем перехода из включенного в выключенное состояние или из выключенного во включенное состояние. Итак, чтобы управлять скоростью асинхронного двигателя с помощью микроконтроллера pic, вы должны знать, как спроектировать схему трехфазного мостового выпрямителя? Как спроектировать инвертор источника трехфазного напряжения? Как использовать схемы драйвера затвора? и как использовать микроконтроллер PIC для генерации сигналов PWM для моста H.Для полной работы посмотрите это видео
, свяжитесь со мной по телефону [адрес электронной почты] , чтобы купить код и симуляцию
Управление скоростью трехфазного асинхронного двигателя с использованием Arduino
РЕЗЮМЕВ этом проекте предлагается управлять скоростью трехфазного асинхронного двигателя с помощью контроллера Arduino. Контроллер Arduino используется для генерации сигналов широтно-импульсной модуляции (ШИМ). А скорость двигателя контролируется с помощью схемы драйвера и трехфазного инвертора.Кроме того, этот проект снизил гармонические составляющие и коммутационные потери в цепи. В этом проекте два переключателя используются для увеличения и уменьшения скорости двигателя. Изменение скорости можно увидеть на тахометре.
Демо-видео
СТБ-СХЕМА
ДЕТАЛИ ПЛАТЫ 3-ФАЗНОГО ИНВЕРТОРА
Плата инвертора поставляется со встроенным мостовым выпрямителем и фильтрующим конденсатором.6 шт. МОП-транзисторов IRFP250 установлены с радиатором. Выход инвертора заканчивается 3-х контактным разъемом PTB. Пользователь должен припаять на тыльной стороне платы интерфейс стробирующего импульса.
➣6 No IRFP250 MOSFET установлены с надлежащим радиатором
➣5A Мостовой выпрямитель с конденсатором фильтра постоянного тока (1000 мкФ / 250 В)
➣ 3-контактный разъем PTB для подключения двигателя
СХЕМА ПРЕОБРАЗОВАТЕЛЯ
ПЛАТА ИНВЕРТОРА
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
➣6 № IRFP250 MOSFET с радиатором
➣Входное напряжение 100 В / AC / 50 Гц
➣Рабочая частота 25 кГц
➣ Входы и выходы оканчиваются разъемами PTB
.TLP 250 ПЛАТА ВОДИТЕЛЯ
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
➣6 Нет, оптоизолированный привод затвора
➣Входное напряжение 12 В / AC / 50 Гц
➣Рабочая частота 25 кГц
➣ Все входы и выходы оканчиваются штекерными разъемами RMC
ДОСКА ВОДИТЕЛЯ
ВХОДЫ ПЕРЕКЛЮЧАТЕЛЯ УВЕЛИЧЕНИЯ / УМЕНЬШЕНИЯ КОНТАКТЫ ПРЕРЫВАНИЯКЛЮЧИ | НАЗНАЧЕНИЕ | ПИН-код | КОНТРОЛЛЕР ARDUINO |
КЛЮЧ 1 | ПРИЕМ | ДАННЫЕ 1 | Контакт 2 |
КЛЮЧ 2 | ЗАЯВЛЕНИЕ | ДАННЫЕ 2 | Штифт 3 |
ВЫХОДЫ ШИМ | КОНТРОЛЛЕР ARDUINO | ВЫКЛЮЧАТЕЛЬ ПИТАНИЯ (как на принципиальной схеме инвертора) |
ШИМ 1 | 4 | 1 квартал |
ШИМ 2 | 5 | Q6 |
ШИМ 3 | 6 | 3 квартал |
ШИМ 4 | 7 | 2 квартал |
ШИМ 5 | 8 | Q5 |
ШИМ6 | 9 | 4 квартал |
МОЩНОСТЬ МОТОРА
ПЛАТА ИНВЕРТОРА | ЦВЕТ ДВИГАТЕЛЯ |
ФАЗА 1 | КРАСНЫЙ |
ФАЗА 2 | ЖЕЛТЫЙ |
ФАЗА 3 | СИНИЙ |
СХЕМА ПОДКЛЮЧЕНИЯ
ВЫХОДНЫЕ ВОЛНЫСравнение двух импульсов
Междуфазный выход инвертора
Сравнение выходной мощности инвертора
Для просмотра других проектов силовой электроники щелкните здесь
Универсальный контроллер скорости двигателя переменного тока на базе Arduino
ВведениеВНИМАНИЕ !!! Сначала напишу цитату:
СТОП !!! Эта цепь подключена к напряжению 110-220 Ом.Не создавайте это, если вы не уверены в том, что делаете. Отключите его, прежде чем приблизиться к печатной плате. Пластина охлаждения симистора подключена к сети. Не прикасайтесь к нему во время работы. Поместите его в подходящий корпус / контейнер.
ПОДОЖДИТЕ !!! Позвольте мне добавить здесь более сильное предупреждение: эта схема безопасна, если она создается и реализуется только людьми, которые знают, что они делают. Если вы не имеете ни малейшего понятия или сомневаетесь в том, что делаете, скорее всего, вы будете МЕРТВЫ !!! НЕ ТРОГАЙТЕСЬ ПРИ ПОДКЛЮЧЕНИИ К СЕТИ !!!
Теперь позвольте представить мой проект.Это регулятор скорости двигателя, управляемый Arduino, который использует метод диммирования с отсечкой фазы и алгоритм PID.
Основные характеристики контроллера:
- Два диапазона скорости для более быстрого изменения желаемого числа оборотов.
- Поворотный энкодер позволяет установить желаемое число оборотов перед запуском двигателя.
- Кнопка энкодера запускает и останавливает двигатель.
- 2×16 ЖК-дисплей для отображения состояния и частоты вращения.
- Плавный пуск двигателя.
- Сохраняет число оборотов и крутящий момент при нагрузке.
- Управление скоростью и крутящим моментом по алгоритму PID.
- Защита двигателя от заклинивания (или неисправности датчика скорости).
- Защита от превышения скорости (обычно при повреждении симистора).
Есть видео, где можно посмотреть, как работает контроллер:
Защита двигателя при работе:
Как все начиналось
После просмотра этого видео (на русском языке) :
Решил построить аналогичный токарный станок. И успешно повторил этот проект.Конечно, с некоторыми изменениями. Осталось только одно — мотор. Сначала я использовал асинхронный однофазный двигатель с рабочим конденсатором. Основные недостатки такого двигателя:
- Отсутствие дешевой регулировки скорости. Ни механического, ни электронного. Придется использовать комплект шкивов или дорогой электронный контроллер.
- Ограниченная скорость — всего 1400 об / мин.
- Ограниченное время работы — 10 минут работы / 6 минут простоя. Иначе станет жарко.
Как вы могли заметить, парень на видео использовал мотор, утилизированный от старой стиральной машины.Такой же мотор был у меня в мастерской. Осталось одно — регулятор скорости мотора. Без него мотор будет раскручиваться на максимуме 15000-19000 об / мин. Это слишком много для токарного станка по дереву. Чтобы контролировать скорость вращения двигателя, мы могли бы использовать регулятор напряжения SCR, но на низких оборотах двигатель будет слабым и не будет крутящего момента. К счастью, в двигателях такого типа есть датчики тахометра, и мы можем создать систему с замкнутым контуром, чтобы иметь стабильные обороты даже при нагрузке и контролировать крутящий момент.
В поисках решенияХорошо известна микросхема TDA1085, которая специально разработана для управления двигателями с датчиками скорости вращения.Но у меня этого чипа не было, и чтобы увидеть обороты, пришлось сделать тахометр. В китайских историях я нашел дешевый регулятор скорости двигателя переменного тока с функцией стабилизации оборотов. Я купил один и протестировал. Все нормально, кроме нескольких вещей:
- Всего 400Вт. (можно было увеличить, заменив симистор)
- Макс.об / мин — 1450! После того, как мои использованные шкивы будут только около 480 об / мин!
- Нет индикации оборотов.
После серфинга в Интернете я нашел несколько проектов регуляторов скорости и решил сделать свой собственный контроллер, используя найденные идеи.
Вот список ресурсов, которые я использовал:
- Много теории. Также отсюда я использовал часть схемы измерения тахометра.
- Также примечание по применению NXP. Много полезной информации.
- Немного теории, полезного кода и схемы здесь.
- Принял идеи и взял отсюда (русский) код.
- Код диммирования, который я использовал отсюда (ИМХО лучший диммер). Отсюда взял код отсчета
- оборотов в минуту (русский).
- Взял отсюда несколько фрагментов кода использования PID.
- Библиотека PID.
- Описание библиотеки PID. Также здесь.
- Немного полезной информации об использовании библиотеки PID.
Я не буду приводить теории, как работает отсечка фазы переменного тока, потому что здесь нет ничего нового. Выше я привел некоторые ссылки на теорию диммирования и управления двигателем (первая и вторая ссылки). NXP и Microchip содержат много полезной информации об управлении двигателями.
Принципиальная схема, нарисованная отдельными блоками:
- Arduino Nano V3
- 16×2 HD44780 LCD с модулем PCF8574 I2C.(Данная схема модуля не точна!).
- Обнаружение импульсов тахометра. Использует компаратор LM393 для преобразования импульсов тахометра на уровень микроконтроллера.
- Обнаружение пересечения нуля. Каждый раз, когда линия переменного тока пересекает нулевую точку, микроконтроллер получает сигнал. Цепь высокого напряжения изолирована от микроконтроллера с помощью оптрона.
- Схема управления реле на простом переключающем транзисторе NPN.
- Цепь управления двигателем изолирована оптопарой и использует симистор с демпфирующей цепью (C4, R14).Возможно использование безнапорных симисторов (тогда C4 и R14 не требуются).
- Модуль питания переменного / постоянного тока. Достаточно 5В, 0,5-1А. Я использовал старое зарядное устройство USB для телефона.
- Поворотный энкодер, переключатель линии питания 10А с индикацией, любой 3-х позиционный переключатель для переключения диапазона оборотов.
Все компоненты распаяны на макетной плате. Для дополнительных контроллеров я прослежу печатную плату. Некоторые фото:
Я использовал симистор BTA41, потому что он был у меня на складе. Можно использовать симистор на 10-16 ампер. Я.е. BTA16.
Полный список используемых компонентов вы можете найти в текстовом файле в zip-архиве.
КонструкцияВ моей мастерской был пластиковый корпус, который отвечал моим требованиям. Я использовал его для этого проекта. Размеры коробки: В 150 мм (~ 5,9 дюйма), Ш 70 мм (~ 2,76 дюйма), Д 110 мм (~ 4,33 дюйма),
Несколько слов о кодеЯ перепробовал множество алгоритмов управления двигателем и синхронизации с отсечкой фазы, но у большинства из них были свои недостатки: управление двигателем было нестабильным.Иногда подскакивал при старте, иногда при беге. Иногда мотор по неизвестной причине разгонялся до максимальных оборотов. В конце концов я решил использовать и понять метод ПИД-регулирования.
Код использует 2 внешних прерывания. Один для перехода через ноль, один для датчика тахометра. Таймер для управления задержкой импульсов симистора. Алгоритм PID для управления выходом в зависимости от заданного значения и входа. Для плавного пуска мотора я сделал алгоритм разгона RAMP. Во время пуска параметры ПИД-регулятора имеют более низкие значения и возвращаются к нормальным значениям во время работы двигателя.Это предотвращает резкий запуск двигателя (скачок).
Интервал обновления ЖК-дисплея составляет 2 секунды. Достаточно наблюдать за реальным изменением оборотов. Ускорение может повлиять на стабильность системы. Это потому, что в ЖК-библиотеке используются функции задержки.
Я использовал множество глобальных переменных, чтобы упростить настройку системы под ваши нужды и различные двигатели. Позже выложу в архив скетчи тестов и тюнинга.
Все используемые библиотеки можно найти в zip-архиве.
ЗаключениеЯ доволен тем, как работает мой самодельный контроллер.Теперь мне нужно установить двигатель на токарный станок и проверить его в реальных условиях.
Я хочу поблагодарить коллег из групп Arduino в Facebook за помощь. И спасибо жене за терпение: D
Комментарии и вопросы приветствуются.
Простите за английский. 😉
ОбновлениеЯ добавил в свой код один новый параметр. Это передаточное число шкива. В моем случае это 2,96. Это разница между меньшим шкивом на двигателе и большим на шпинделе. Шкивы, которые я использовал, были взяты из брошенных машин.Используйте эскиз без параметра соотношения или установите его на 1, если шкивы не будут использоваться.
Смонтировал мотор на токарном станке и немного проверил. Я счастлив. Все работает как положено. Крутящего момента хватает даже на малых оборотах.
Скоро я сделаю крышку для двигателя, держатель для блока управления и т. Д.
Управление скоростью однофазного асинхронного двигателя с помощью одного Mosfet
Луай Фархан Згаир
Хасан Али Абед аз-Зуби
Фредрик ОДЖИА
Фируза М.Турсунходжаева
Фараз Ахмед Фаруки
Эрик Рэнди Рейес Политуд
Elsadig Gasoom FadelAlla Эльбашир
Ипен, Аша Сара
Доктор Арун Кумар A
Д-р Зафар Икбал
Доктор.ШАХЕРА С.ПАТЕЛ
Доктор Ручика Ханна
Доктор Реджеп ТАС
Д-р Раша Али Эльдиб
Доктор Пралхад Канхайялал Рахангдейл
DR. ПАТРИК Д. ЧЕРНА
Д-р Николас Падилья-Райгоза
Доктор.Мустафа Ю. Г. Юнис
Д-р Мухаммад Шоаиб Ахмедани
DR. МУХАММАД ИСМАИЛ МОХМАНД
DR. МАХЕШ ШИВАДЖИ ЧАВАН
DR. М. АРУНА
Доктор Лим Джи Ни
Д-р Джатиндер Пал Сингх Чавла
DR.ИРАМ БОХАРИ
Доктор ФАРХАТ НАЗ РАХМАН
Доктор Девендра Кумар Гупта
Д-р АШВАНИ КУМАР ДУБЕЙ
Д-р Али Сейди
Д-р Ахмад Чоэрудин
Д-р Ашок Кумар Верма
Тхи Монг Дьеп НГУЕН
Доктор.Мухаммад Акрам
Д-р Имран Азад
Доктор Минакши Малик
Асеил Хади Хамза
Анам Бхатти
Md.