Короткозамкнутые асинхронные двигатели
Короткозамкнутые асинхронные двигатели по конструкции ротора имеют следующие модификации: с одиночной беличьей клеткой; глубокопазные; с двойной беличьей клеткой, или двухклеточные. Конструктивное отличие этих модификаций обусловливает различие характеристик этих машин, в первую очередь пусковых, о чем более подробно будет сказано в последующих разделах.
Асинхронные двигатели с одиночной беличьей клеткой на роторе имеют пазы, выштампованиые в листовой стали, овальной или круглой формы (рис. 8,а). Сверху эти пазы перекрываются мостиком толщиной 0,4—0,5 мм и заливаются алюминием. С обоих торцов ротора располагаются алюминиевые кольца, которые замыкают все отлитые в пазах стержни. Такая литая единая беличья клетка часто дополнительно снабжается с обеих сторон ротора специальными алюминиевыми крыльями (см. рис. 1). Эти крылья устанавливаются для увеличения теплоотвода от короткозамкнутого ротора и для лучшей вентиляции внутри асинхронной машины.
Рис. 1. — Литая алюминиевая беличья клетка ротора короткозамкиутого асинхронного двигателя (с короткозамыкающим кольцом и вентиляционными лопатками).
В асинхронных электродвигателях с глубокопазным ротором (рис. 2, б) беличья клетка изготавливается обычно из медных стержней прямоугольного сечения. Короткозамыкающие кольца по торцам ротора, как правило, выполняются также из меди, в которых профрезеровываются прорези в соответствии с размерами прямоугольных стержней. Стержни и кольца припаиваются друг к другу тугоплавкими припоями.
Рис. 2. Пазы и стержни обмоток ротора.
а — одиночная беличья клетка; б — глубокий паз; в — двойная беличья клетка.
Двухклеточный ротор (рис.2,в) выполняется с двумя беличьими клетками. Внешняя обмотка изготавливается из латуни или специальной бронзы, благодаря чему обеспечиваются относительно большое ее активное сопротивление и сравнительно малое индуктивное. Эта обмотка выполняет функции пусковой в асинхронном двигателе.
Существуют другие модификации пазов ротора (бутылочного профиля, трапецеидального профиля), однако описанные выше являются наиболее характерными для асинхронных двигателей.
При выборе электродвигателя необходимо проконсультироваться с заводом производителем
Источник: Архипцев Ю.Ф. Асинхронные электродвигатели. (1975)
Статьи по теме:
КОНСТРУКЦИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Устройство и работа электродвигателя
Типы двигателей. Разбираемся в самом главном
Какак разница между короткозамкнутым и фазным ротором
Какак разница между короткозамкнутым и фазным ротором
Ротор — вращающаяся часть двигателей и рабочих машин, на которой расположены органы, получающие энергию от рабочего тела или отдающие её рабочему телу.
Как вы знаете, асинхронные электродвигатели имеют трехфазную обмотку (три отдельные обмотки) статора, которая может формировать разное количество пар магнитных полюсов в зависимости от своей конструкции, что влияет в свою очередь на номинальные обороты двигателя при номинальной частоте питающего трехфазного напряжения. При этом роторы двигателей данного типа могут отличаться, и у асинхронных двигателей они бывают короткозамкнутыми или фазными. Чем отличается короткозамкнутый ротор от фазного ротора — об этом и пойдет речь в данной статье.
Короткозамкнутый ротор
Представления о явлении электромагнитной индукции подскажут нам, что произойдет с замкнутым витком проводника, помещенным во вращающееся магнитное поле, подобное магнитному полю статора асинхронного двигателя. Если поместить такой виток внутри статора, то когда ток на обмотку статора будет подан, в витке будет индуцироваться ЭДС, и появится ток, то есть картина примет вид: виток с током в магнитном поле. Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Тогда на такой виток (замкнутый контур) станет действовать пара сил Ампера, и виток начнет поворачиваться вслед за движением магнитного потока.
Так и работает асинхронный двигатель с короткозамкнутым ротором, только вместо витка на его роторе расположены медные или алюминиевые стержни, замкнутые накоротко между собой кольцами с торцов сердечника ротора. Ротор с такими короткозамкнутыми стержнями и называют короткозамкнутым или ротором типа «беличья клетка» поскольку расположенные на роторе стержни напоминают беличье колесо.
Проходящий по обмоткам статора переменный ток, порождающий вращающееся магнитное поле, наводит ток в замкнутых контурах «беличьей клетки», и весь ротор приходит во вращение, поскольку в каждый момент времени разные пары стержней ротора будут иметь различные индуцируемые токи: какие-то стержни — большие токи, какие-то — меньшие, в зависимости от положения тех или иных стержней относительно поля. И моменты никогда не будут уравновешивать ротор, поэтому он и будет вращаться, пока по обмоткам статора течет переменный ток.
К тому же стержни «беличьей клетки» немного наклонены по отношению к оси вращения — они не параллельны валу. Наклон сделан для того, чтобы момент вращения сохранялся постоянным и не пульсировал, кроме того наклон стержней позволяет снизить действие высших гармоник индуцируемых в стержнях ЭДС. Будь стержни без наклона — магнитное поле в роторе пульсировало бы.
Скольжение s
Для асинхронных двигателей всегда характерно скольжение s, возникающее из-за того, что синхронная частота вращающегося магнитного поля n1 статора выше реальной частоты вращения ротора n2.
Скольжение возникает потому, что индуцируемая в стержнях ЭДС может иметь место только при движении стержней относительно магнитного поля, то есть ротор всегда вынужден хоть немного, но отставать по скорости от магнитного поля статора. Величина скольжения равна s = (n1-n2)/n1.
Если бы ротор вращался с синхронной частотой магнитного поля статора, то в стержнях ротора не индуцировался бы ток, и ротор бы просто не стал вращаться. Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Поэтому ротор в асинхронном двигателе никогда не достигает синхронной частоты вращения магнитного поля статора, и всегда хоть чуть-чуть (даже если нагрузка на валу критически мала), но отстает по частоте вращения от частоты синхронной.
Скольжение s измеряется в процентах, и на холостом ходу практически приближается к 0, когда момент противодействия со стороны ротора почти отсутствует. При коротком замыкании (ротор застопорен) скольжение равно 1.
Вообще скольжение у асинхронных двигателей с короткозамкнутым ротором зависит от нагрузки и измеряется в процентах. Номинальное скольжение — это скольжение при номинальной механической нагрузке на валу в условиях, когда напряжение питания соответствует номиналу двигателя.
Фазный ротор
Асинхронные двигатели с фазным ротором, в отличие от асинхронных двигателей с короткозамкнутым ротором, имеют на роторе полноценную трехфазную обмотку. Подобно тому, как на статоре уложена трехфазная обмотка, так же и в пазах фазного ротора уложена трехфазная обмотка.
Выводы обмотки фазного ротора присоединены к контактным кольцам, насаженным на вал, и изолированным друг от друга и от вала. Обмотка фазного ротора состоит из трех частей — каждая на свою фазу — которые чаще всего соединены по схеме «звезда».
К обмотке ротора через контактные кольца и щетки присоединяется регулировочный реостат. Краны и лифты, например, пускаются под нагрузкой, и здесь необходимо развивать существенный рабочий момент. Невзирая на усложненность конструкции, асинхронные двигатели с фазным ротором обладают лучшими регулировочными возможностями касательно рабочего момента на валу, чем асинхронные двигатели с короткозамкнутым ротором, которым требуется промышленный частотный преобразователь.
Обмотка статора асинхронного двигателя с фазным ротором выполняется аналогично тому, как и на статорах асинхронных двигателей с короткозамкнутым ротором, и аналогичным путем создает, в зависимости от количества катушек (три, шесть, девять или более катушек), два, четыре и т.
Регулируя ток в обмотках ротора, регулируют рабочий момент двигателя и величину скольжения. Когда регулировочный реостат полностью выведен, то для уменьшения износа щеток и колец их закорачивают при помощи специального приспособления для подъема щеток.
Ранее ЭлектроВести писали, что в Атлантическом океане первый в мире телескопический ветрогенератор обеспечивает электроэнергией 5000 домохозяйств на одном из Канарских островов — Гран-Канария.
По материалам: electrik.info.
Ротор «беличье колесо» электродвигателя.Как это работает и устроено | Электронные схемы
ротор асинхронного электродвигателя беличье колесоВ прошлой статье я рассмотрел работу асинхронного двигателя с расщепленными полюсами и у этого двигателя есть интересный ротор,у которого нет видимой обмотки и нет контактов для щеток,к этому ротору ничего не подключается. Такой ротор для асинхронных двигателей называется короткозамкнутым или «беличья клетка» или «беличье колесо».
Такой ротор для асинхронных двигателей называется короткозамкнутым или «беличья клетка» или «беличье колесо».
Чтобы узнать как устроен этот ротор,вышел за дом и горелкой расплавил алюминий ротора.В итоге остался магнитопровод набранный из пластин,и в нем находятся отверстия штук двадцать под определенным углом.В эти отверстия заливают алюминий и получаются двадцать алюминиевых стержней(витки),и с двух сторон магнитопровода заливают алюминий и эти стержни тем самым замыкают.
короткозамкнутый ротор асинхронного двигателя беличье колесоТакой ротор вставляют в отверстие-статор в магнитопроводе двигателя.Вокруг ротора находится вращающееся магнитное поле исходящее от статора.От магнитного поля статора на этих стержнях ротора индуцируется ЭДС и ток,получается стержень с током во вращающемся магнитном поле.На эти стержни начинает действовать сила Ампера и ротор начинает вращаться вслед вращающемуся магнитному полю статора.
алюминиевый ротор вращается из за вихревых токов в металле ротораСделал простой ротор из алюминиевого стакана из конденсатора. В стакане нет магнитопровода,но в алюминии будут наводиться вихревые токи от магнитного поля и стакан будет вращаться.
В стакане нет магнитопровода,но в алюминии будут наводиться вихревые токи от магнитного поля и стакан будет вращаться.
Далее решил сделать простейший короткозамкнутый ротор.Сердечник или магнитопровод применил из шести склеенных монет по 10 копеек.Проверил этот сердечник,будет ли он вращаться без стержней и он не вращается.
короткозамкнутый ротор беличье колесо или беличья клеткаДалее поместил этот сердечник в клетку из четырех замкнутый медных стержней.Такой ротор начал вращаться и это работает.»Беличье колесо»,такое название дано из-за схожести замкнутых стержней с клеткой,в которой белки бегут и вращают колесо.
как устроен и работает ротор асинхронного двигателя беличье колесоБеличья клетка | mysite
Короткозамкнутая обмотка ротора, часто называемая «беличья клетка» из-за внешней схожести конструкции, состоит из алюминиевых (реже медных, латунных) стержней, замкнутых накоротко с торцов двумя кольцами.
Зачастую пазы ротора или статора делают скошенными для уменьшения высших гармонических ЭДС, вызванных пульсациями магнитного потока из-за наличия зубцов, магнитное сопротивление которых существенно ниже магнитного сопротивления обмотки, а также для снижения шума, вызываемого магнитными причинами.
Для улучшения пусковых характеристик асинхронного электродвигателя с короткозамкнутым ротором, а именно, увеличения пускового момента и уменьшения пускового тока, на роторе ранее применялась так называемая «двойная беличья клетка» из стержней с разными удельными проводимостями, позже стали применять роторы со специальной формой паза (глубокопазные роторы). При этом внешняя от оси вращения часть паза ротора имеет меньшее сечение, чем внутренняя. Это позволяет использовать эффект вытеснения тока, за счет которого увеличивается активное сопротивление обмотки ротора при больших скольжениях (в частности, при пуске).
При этом внешняя от оси вращения часть паза ротора имеет меньшее сечение, чем внутренняя. Это позволяет использовать эффект вытеснения тока, за счет которого увеличивается активное сопротивление обмотки ротора при больших скольжениях (в частности, при пуске).
Асинхронные двигатели с короткозамкнутым ротором при прямом пуске (без регулирования) имеют небольшой пусковой момент и значительный пусковой ток, что является существенным их недостатком. Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты. С развитием силовой полупроводниковой техники получают распространение частотные преобразователи, которые позволяют плавно наращивать частоту питающего двигатель тока по мере пуска, а значит достигать большого пускового момента. Из достоинств следует отметить лёгкость в изготовлении, и отсутствие электрического контакта с динамической частью машины, что гарантирует долговечность и снижает затраты на обслуживание. При специальной конструкции ротора, когда вращается в воздушном зазоре только полый цилиндр из алюминия, можно достичь малой инерционности двигателя.
Разновидностью АДКЗ, позволяющей ступенчато регулировать скорость, являются многоскоростные двигатели, в которых регулирование скорости производится изменением числа пар полюсов в статоре, для чего были разработаны специальные виды обмоток.
Именно асинхронные двигатели с короткозамкнутым ротором из-за своих вышеперечисленных достоинств являются основным видом двигателей в промышленном электроприводе, применение остальных видов двигателей не значительно и носит узкоспециальный характер.
Асинхронный двигатель с короткозамкнутым ротором
Беличья клетка. Конструкция асинхронного короткозамкнутого электродвигателя.
Асинхронные бесколлекторные двигатели нашли наиболее широкое распространение благодаря сравнительной простоте и надежности в эксплуатации. Коллекторные двигатели имеют ограниченное применение в установках, где требуется регулировать скорость приводимых механизмов в широких пределах. Однако они относительно тяжелы, дороги, имеют худшие рабочие характеристики по сравнению с бесколлекторными двигателями, а главное менее надежны в эксплуатации из-за тяжелых условий коммутации тока.
Асинхронные бесколлекторные машины имеют два основных исполнения: с короткозамкнутой обмоткой ротора и с фазной обмоткой ротора — с контактными кольцами. С точки зрения происходящих электромагнитных процессов в асинхронном двигателе можно выделить две наиболее важные части: неподвижный статор, обеспечивающий создание вращающегося магнитного поля, и вращающийся ротор, в котором создается электромагнитный момент, передаваемый приводимому механизму. Сердечники статора набираются из листов электротехнической стали толщиной 0,5 мм и реже 0,35 мм, изолированных друг от друга лаковым покрытием (в сердечниках роторов двигателей малой мощности изоляцией служит слой окалины на поверхности листа). В сердечниках статора и ротора сделаны специальные пазы, в которых размещаются соответствующие обмотки.
Рис. 1. Литая алюминиевая беличья клетка ротора короткозамкнутого асинхронного двигателя (с короткозамыкающим кольцом и вентиляционными лопатками)
Одной из наиболее распространенных роторных обмоток является короткозамкнутая, так называемая беличья клетка (внешне она. напоминает беличье колесо — рис. 1). Рабочие провода этой обмотки (стержни) укладываются в пазы ротора неизолированными, благодаря чему обеспечиваются хорошее использование площади паза и хорошая теплоотдача от стержней к активной стали.
напоминает беличье колесо — рис. 1). Рабочие провода этой обмотки (стержни) укладываются в пазы ротора неизолированными, благодаря чему обеспечиваются хорошее использование площади паза и хорошая теплоотдача от стержней к активной стали.
Короткозамкнутые асинхронные двигатели по конструкции ротора имеют следующие модификации: с одиночной беличьей клеткой; глубокопазные; с двойной беличьей клеткой, или двухклеточные. Конструктивное отличие этих модификаций обусловливает различие характеристик этих машин, в первую очередь пусковых.
Рис. 2. Пазы и стержни обмоток ротора. а — одиночная беличья клетка; б— глубокий паз; в — двойная беличья клетка.
Асинхронные двигатели с одиночной беличьей клеткой на роторе имеют пазы, выштампованные в листовой стали, овальной или круглой формы (рис. 2,а). Сверху эти пазы перекрываются мостиком толщиной 0,4—0,5 мм и заливаются алюминием. С обоих торцов ротора располагаются алюминиевые кольца, которые замыкают все отлитые в пазах стержни. Такая литая единая беличья клетка часто дополнительно снабжается с обеих сторон ротора специальными алюминиевыми крыльями (см. рис. 1). Эти крылья устанавливаются для увеличения теплоотвода от короткозамкнутого ротора и для лучшей вентиляции внутри асинхронной машины.
рис. 1). Эти крылья устанавливаются для увеличения теплоотвода от короткозамкнутого ротора и для лучшей вентиляции внутри асинхронной машины.
В асинхронных электродвигателях с глубокопазным ротором (рис. 2,б) беличья клетка изготавливается обычно из медных стержней прямоугольного сечения. Короткозамыкающие кольца по торцам ротора, как правило, выполняются также из меди, в которых профрезеровываются прорези в соответствии с размерами прямоугольных стержней. Стержни и кольца припаиваются друг к другу тугоплавкими припоями.
Двухклеточный ротор (рис. 1,в) выполняется с двумя беличьими клетками. Внешняя обмотка изготавливается из латуни или специальной бронзы, благодаря чему обеспечиваются относительно большое ее активное сопротивление и сравнительно малое индуктивное. Эта обмотка выполняет функции пусковой в асинхронном двигателе. Другая обмотка ротора — внутренняя — изготавливается из меди с минимальным активным сопротивлением. Она выполняет функции основной рабочей обмотки двигателя.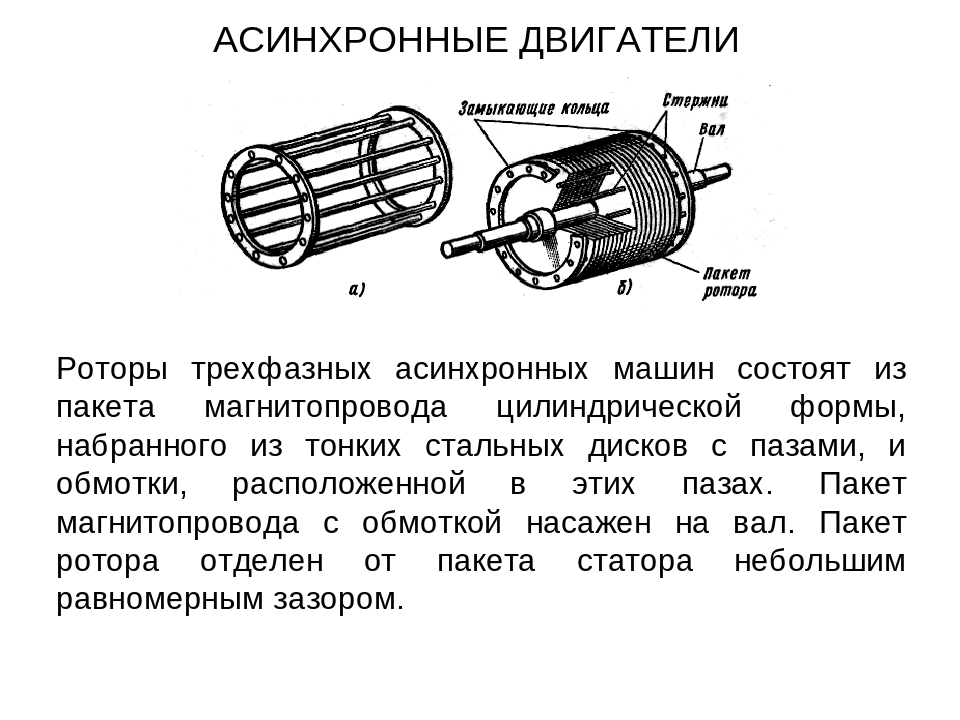 Обе обмотки имеют круглые пазы, однако внутренняя обмотка в ряде случаев выполняется прямоугольной или овальной формы. Короткозамыкающие торцевые кольца для обеих обмоток обычно изготавливаются из меди.
Обе обмотки имеют круглые пазы, однако внутренняя обмотка в ряде случаев выполняется прямоугольной или овальной формы. Короткозамыкающие торцевые кольца для обеих обмоток обычно изготавливаются из меди.
Существуют другие модификации пазов ротора (бутылочного профиля, трапецеидального профиля), однако описанные выше являются наиболее характерными для асинхронных двигателей.
В асинхронном двигателе частота вращения ротора, увлекаемого магнитным полем статора, меньше частоты вращения самого поля. В самом деле, в случае равенства этих частот прекратилось бы движение поля по отношению к ротору, так как в роторе перестала бы наводиться электродвижущая сила, создающая токи в его обмотках. При этом прекратилось бы взаимодействие ротора с вращающимся полем и устранилась бы причина вращения ротора. В таком случае ротор стал бы неминуемо проскальзывать, т. е. частота его вращения стала бы меньше, чем частота вращения магнитного поля, что и соответствует действительному положению в асинхронном двигателе. Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.
Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.
При изучении явлений, протекающих в роторе асинхронного двигателя, когда он заторможен (т. е. при неподвижном роторе), можно заключить, что машина в этом режиме по своей физической природе представляет собой трансформатор. Первичной обмоткой трансформатора служит статор, а вторичной — обмотка ротора. В общем случае асинхронный двигатель отличен от трансформатора главным образом своим конструктивным исполнением. У асинхронной машины вторичная обмотка отделена от первичной воздушным зазором, чего нет в общепромышленных трансформаторах. Кроме того, вторичная обмотка двигателя вращается по отношению к первичной. Как было отмечено выше, частота вращения п, с которой вращается ротор, должна отличаться от частоты вращения магнитного поля п1. В зависимости от соотношения этих частот существуют три режима работы асинхронной машины: двигательный, генераторный, тормозной.
При работе асинхронной машины в двигательном режиме частота вращения ротора изменяется в пределах 0п1), то асинхронная машина перейдет в генераторный режим. При этом направление вращения поля статора относительно ротора изменится на обратное по сравнению с работой машины в двигательном режиме. Электромагнитный момент на валу, развиваемый асинхронной машиной, становится тормозящим по отношению к двигателю, который приводит ее во вращение. Механическая энергия, передаваемая этим двигателем асинхронной машине, преобразуется в электрическую и отдается в сеть, к которой подключен ее статор.
При этом направление вращения поля статора относительно ротора изменится на обратное по сравнению с работой машины в двигательном режиме. Электромагнитный момент на валу, развиваемый асинхронной машиной, становится тормозящим по отношению к двигателю, который приводит ее во вращение. Механическая энергия, передаваемая этим двигателем асинхронной машине, преобразуется в электрическую и отдается в сеть, к которой подключен ее статор.
Режим работы асинхронной машины, когда ротор приводится во вращение против направления вращения электромагнитного поля статора, получил название режима электромагнитного тормоза.
?
Новый метод определения дефектов литья беличьей клетки ротора асинхронного двигателя до механической обработки Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
ИЗВЕСТИЯ
ТОМСКОГО ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА имени С. М. КИРОВА
М. КИРОВА
Том 132 1965
НОВЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ ЛИТЬЯ БЕЛИЧЬЕЙ КЛЕТКИ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ ДО МЕХАНИЧЕСКОЙ ОБРАБОТКИ
М. П. ТАБИНСКИЙ, А. И. ЗАЙЦЕВ
(Представлена научно-техническим семинаром кафедры ЭПП электромеханического
факультета)
В настоящее время на электромоторных заводах проверка качества заливки роторов тю ходу технологического процесса не производится, поэтому дефекты литья беличьей клетки обнаруживаются лишь в собранной машине при контрольном испытании. Во многих случаях двигатели с некачественными роторами проходят через контрольные испытания незамеченными. В результате этого наша промышленность терпит убытки как из-за непосредственной траты труда на изготовление некачественных роторов двигателей, так из-за преждевременного выхода из строя электродвигателей, пропущенных через контроль.
Причиной этого является отсутствие простого й надежного, а вместе с тем производительного метода проверки ка’чества заливки ротора [1]. Поэтому поиски рационального метода контроля заливки необработанных роторов продолжаются.
Ниже описанный метод, базирующийся на сравнении механических характеристик двигателей с нормальным и дефектным ротором, является принципиально новым.
Известно, что механические характеристики асинхронного двигателя зависят от параметров статорной и роторной обмоток. Дефекты литья беличьей клетки вызывают некоторое изменение параметров двигателя: раковины в стержне увеличивают активное сопротивление, практически не изменяя сопротивления рассеяния, а обрыв одного стержня сопровождается увеличением активного сопротивления ротора и увеличением сопротивления рассеяния [2].
Экспериментальные исследования, проведенные в лаборатории кафедры электрификация промышленных предприятий Томского политехнического института выявили возможность распознавания дефектов беличьей клетки но различию механических характеристик двигателей с исправным и неисправным ротором [3]. Для этой цели была сконструирована лабораторная установка применительно к роторам электродвигателей ЭМУ-5А и ЭМУ-12А. Установка состоит из многофазного статора с внутренним диаметром на 10 мм больше испытуемого ротора, консольного вала для центрирования испытуемого ротора в расточке статора и источника несимметричного напряжения, подводимого к статору асинхронного двигателя.
Для этой цели была сконструирована лабораторная установка применительно к роторам электродвигателей ЭМУ-5А и ЭМУ-12А. Установка состоит из многофазного статора с внутренним диаметром на 10 мм больше испытуемого ротора, консольного вала для центрирования испытуемого ротора в расточке статора и источника несимметричного напряжения, подводимого к статору асинхронного двигателя.
При большом воздушном зазоре и ненасыщенной стали м.д.с. обмотки фазы статора имеет форму трапеции,-Для удобства анализа про-160
исходящих в машине процессов разложим кривую м.д.с. на гармоники, причем, гармониками пятого и высших порядков из-за их малости можно пренебречь.
По [4], результирующая м.д.с. симметричной трехфазной обмотки при симметричной системе напряжений, приложенной’ к фазам статора, представляет собой правобегущую волну по окружности статора с амплитудой, равной
л=!■/>. -|—х
-|—х
з-
+
+ О)/—-X
(2)
где />;}
X
амплитуда м.д.с. третьей гармоники; коэффициенты;
пространственная координата; ~ —полюсное деление.
Уравнение (2) позволяет представить машину в виде совокупности трех независимых элементарных двигателей различной мощности с жестко соединенными валами, с числом пар полюсов 2 и р = 6, причем четырехполюсных машин две (рис. 1).
Результирующая механическая характеристика такой машины при симметричном роторе представлена на рис. 2.
2.
Рассмотрим явления, возникающие в машине при наличии раковины, которая вызывает увеличение активного сопротивления стержня, что приводит к некоторой несимметрии токов ротора. Эта несимметрия токов возникает в каждом из трех элементарных двигателей.
Несимметричную систему токов ротора можно разложить на симметричные составляющие прямой и обратной последовательности. При этих условиях [51 в каждом двигателе возникают два вращающихся магнитных поля. Первое создается м.д.с. токов статора и токами прямой последовательности ротора, второе — м.д.с. токов обратной последовательности ротора и токами статора частоты /~(1—25)/ь индуктируемых в обмотках статора потоком ротора обратной последователь-
Рис. 1.
*) Для простоты рассуждений левобегущую волну м.д.с. третьей гармоники не учитываем, так как ее максимальное влияние находится в зоне отрицательных скоро-
стей.
11. Заказ 5716.
161
ности. В соответствии с этим в каждом элементарном двигателе будут существовать два момента: М\ и М» (рис. 3). Результирующая механическая характеристика машины получается путем сложения отдельных механических характеристик элементарных двигателей.
Как видно из сравнения рис. 2 и 3, механические характеристики машины с нормальным и дефектным ротором сильно отличаются между собой. Наиболее сильно отличие проявляется в области провала, выз-
ванного третьей гармоникой магнитного поля. Если при нормальном роторе провал в механической характеристике заходит в область отрицательных моментов, то при дефектном роторе провал расположен
только в двигательной области и не достигает нулевого значения момента.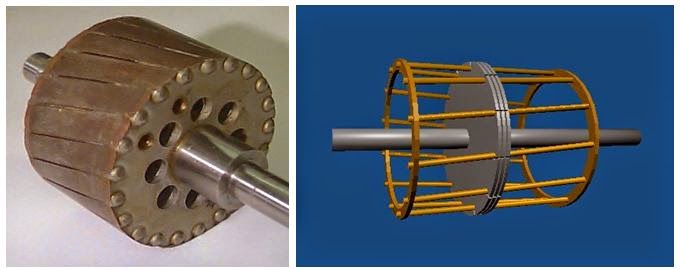 Именно данное обстоятельство используется в новом методе контроля: нормальный ротор при пуске установки разгоняется до гаад-синхронной скорости третьей гармоники магнитного поля, а ротор с дефектом литья разгоняется до подсинхронной скорости основной гармоники магнитного поля статора.
Именно данное обстоятельство используется в новом методе контроля: нормальный ротор при пуске установки разгоняется до гаад-синхронной скорости третьей гармоники магнитного поля, а ротор с дефектом литья разгоняется до подсинхронной скорости основной гармоники магнитного поля статора.
Распознавать дефектные ротора по скорости вращения можно визуально или при помощи тахометра.
Длительность процесса контроля определяется временем разгона ротора. С помощью установки определяются следующие дефекты литья беличьей клетки:
1) одва раковина в одном стержне, уменьшающая сечение стержня в этом месте на 30%;
2) полный обрыв стержня;
3) обрыв двух и более стержней. —
Необходимо отметить высокую эффективность данного метода даже при закрытых пазах.
ЛИТЕРАТУРА
1. Дан Теодореску. Новый способ определения литейных дефектов стержней короткозамкнутых роторов. ВЭП, № 7, 1963.
2. Hiller, Ute — Maria. Eisfluß fehlender Läuferstäbe auf die elektrischen Eigenschaften von Kurzschlußläufer — Motoren. ETZ — A, à 4, 1962.
3. А. И. Зайцев, M. П. Т а б и н с к и й, Л. А. Ц и р и н а. Обнаружение повреждений ротора короткозамкнутого асинхронного двигателя. Тезисы докладов И научно-технической конференции по вопросам автоматизации производства, Томск, 1964.
4. М. П. Костенко, Л. М. Пиотровский. Электрические машины. Ч. il, ГЭИ, 1958. ‘ !
5. В. П. А н д р е е в, Ю. А. Сабинин. Основы электропривода. ГЭИ, 1963.
И*.
Электромагнитные дефекты | Спектральная вибродиагностика
«Диагностика дефектов вращающегося оборудования по вибрационным сигналам» 2012 г.
3.2. Дефекты оборудования уровня «механизм»
Анализируя сигналы с датчиков вибрации, установленных
на опорных подшипниках электрических машин, можно выявить достаточно много
специфических дефектов состояния, возникающих только в электродвигателях и
генераторах различного типа. Причиной повышенной вибрации электрических машин могут
являться как различные внутренние электромагнитные дефекты электрических машин,
так некоторые специфические особенности проявления электромагнитных процессов в
обмотках и сердечниках, т. е. это просто может отражать особенности нормальной
работы электродвигателей и генераторов во вращающихся агрегатах.
Применение вибрационных методов диагностики дефектов состояния электродвигателей и генераторов обычно является первым этапом в оценке их состояния. Так происходит потому, что они позволяют оперативно анализировать состояние оборудования непосредственно во время его работы, или как это принято называть в литературе, реализуют диагностику и мониторинг технического состояния в режиме «on-line».
После применения вибрационного анализа для диагностики дефектов в электрических машинах, и выявления основных характерных признаков существования того или иного дефекта, можно, а иногда даже необходимо, применять другие, специализированные и, естественно, более точные методы диагностики состояния электрических машин.
Очевидно,
что описание этих методов выходит за рамки данной работы, и ознакомиться с ними
можно, если обратиться к другой, более специализированной литературе. Частично,
но все равно более широко, чем это обычно делается в «обычной» литературе по вибрационной
диагностике, эти методы рассмотрены в данном разделе. Некоторые аспекты диагностики
электротехнического оборудования приведены ниже, в соответствующем разделе.
Частично,
но все равно более широко, чем это обычно делается в «обычной» литературе по вибрационной
диагностике, эти методы рассмотрены в данном разделе. Некоторые аспекты диагностики
электротехнического оборудования приведены ниже, в соответствующем разделе.
При выборе дефектов, которые мы описываем в данном разделе, мы исходили из простого определения. Если дефект можно диагностировать при помощи установки датчиков вибрации на опорных подшипниках, то его описание включено в данный раздел. Если же для диагностики необходимо устанавливать датчики вибрации в других точках контролируемой электрической машины, то описание диагностики таких дефектов вынесено в особый раздел данного методического руководства.
Обычные,
достаточно широко распространенные причины повышенной вибрации электрических
машин «не электромагнитного характера», такие как небаланс, проблемы
подшипников, наличие изогнутого вала, и т. д. в данном разделе методического
руководства никак не рассматриваются. По вопросам диагностики этих дефектов в
двигателях и генераторах вибрационными методами следует обращаться к соответствующим
разделам данного руководства.
д. в данном разделе методического
руководства никак не рассматриваются. По вопросам диагностики этих дефектов в
двигателях и генераторах вибрационными методами следует обращаться к соответствующим
разделам данного руководства.
Для проведения диагностики различных электромагнитных дефектов в электрических машинах необходимо использовать измерительное оборудование, имеющее достаточно высокие эксплуатационные параметры. Не все приборы, хорошо подходящие для диагностики дефектов механической природы возникновения, такие как небаланс, расцентровка, и т. д., могут быть использованы для анализа технического состояния электрических машин переменного тока.
Для
успешной диагностики различных электромагнитных проблем в электрических
двигателях и генераторах необходим анализатор спектров вибросигналов с очень
высокой разрешающей способностью, с числом спектральных линий, не меньшем, чем
3200, а желательно и лучше. Кроме того, такой прибор должен иметь возможность
проводить регистрацию вибрационных сигналов в течение достаточно длительного
интервала времени, не менее 10 — 20 секунд. Это необходимо делать для
эффективного разделения проблем механической и электромагнитной природы
возникновения, что возможно сделать только в момент отключения контролируемого
агрегата от питающей сети.
Кроме того, такой прибор должен иметь возможность
проводить регистрацию вибрационных сигналов в течение достаточно длительного
интервала времени, не менее 10 — 20 секунд. Это необходимо делать для
эффективного разделения проблем механической и электромагнитной природы
возникновения, что возможно сделать только в момент отключения контролируемого
агрегата от питающей сети.
Измерение
вибрации на подшипниках электродвигателей и генераторов нужно всегда проводить
в трех направлениях — вертикальном, поперечном и осевом, иначе потом будет невозможно
провести полную диагностику состояния. Идеальным является синхронная регистрация
(не путать с синхронизированной регистрацией, которая гораздо менее эффективна)
сразу шести вибросигналов с двух подшипников электрической машины. Обычно это
повышает достоверность диагнозов дополнительно не менее чем на 10 %.
3.2.6.1. Описание физических процессов в электрических машинах
Вопросами диагностики текущего технического состояния и поиска дефектов в электрических машинах обычно занимаются специальные электротехнические службы, знакомые с особенностями физических процессов в двигателях и генераторах. Для тех, кто раньше не был практически связан с процедурой оценки состояния электротехнического оборудования, необходимо обязательно ознакомиться со специальной литературой, описывающей основные особенности его работы.
Дело
в том, что существует несколько типов электрических машин, процессы в которых
значительно отличаются друг от друга. Кроме того, в каждом типе электрических
машин существует несколько специфических особенностей, не зная которые очень
сложно проводить корректную оценку их технического состояния.
В самом начале данного раздела, на первом этапе описаний, кратко вспомним некоторые основные определения и понятия из минимального, по объему, курса электрических машин. Сделаем это для простоты объяснения причин возникновения вибрации в электрических машинах, а так же для того, чтобы не загромождать эти объяснения в дальнейшем, Знание этих основополагающих понятий совершенно необходимо для проведения корректного диагностирования дефектов электрических машин, для правильного толкования спектрального состава регистрируемых вибрационных сигналов.
По принципу действия различают три основных типа широко применяемых электрических машин:
- Синхронные машины переменного тока, в которых частота вращения ротора совпадает
с частотой вращения электромагнитного поля в зазоре.
 Эти машины могут работать
в режимах двигателя и генератора, в практике встречаются и те, и другие.
Эти машины могут работать
в режимах двигателя и генератора, в практике встречаются и те, и другие. - Асинхронные машины переменного тока, в которых ротор вращается несколько медленнее. Величина отставания ротора от статора составляет несколько процентов, и характеризуется термином «скольжение». Теоретически также могут работать в режимах двигателя и генератора, но на практике встречаются практически одни двигатели.
- Машины постоянного тока. Это также обратимые электрические машины, допускающие двигательный и генераторный режимы работы. На практике встречаются и те, и другие исполнения машин постоянного тока.
В
данном разделе методического руководства будут рассмотрены основные способы
диагностики состояния и поиска дефектов состояния электрических машин
переменного тока, синхронных и асинхронных, как наиболее распространенных в
промышленности и в быту. Электромагнитные проблемы машин постоянного тока очень
сложно поддаются диагностике, в основе которой лежит анализ вибрационных
сигналов с опорных подшипников, поэтому рассматриваться здесь не будут.
Электромагнитные проблемы машин постоянного тока очень
сложно поддаются диагностике, в основе которой лежит анализ вибрационных
сигналов с опорных подшипников, поэтому рассматриваться здесь не будут.
Синхронные и асинхронные машины являются по своему принципу действия обратимыми, т. е. могут работать в как режиме двигателя, так и в режиме генератора. В дальнейшем диагностика дефектов статоров синхронных и асинхронных машин, двигателей и генераторов, не будет подразделяться, т. к. они имеют одинаковые по конструкции статоры. Синхронные машины отличаются от асинхронных только конструкцией ротора, что найдет отражение в специальном подразделе, где будут описаны наиболее часто встречающиеся дефекты короткозамкнутых роторов.
Очень важно уже на самом первом этапе
диагностики, заранее, определиться с диапазоном численных значений частоты
вращения ротора и электромагнитного поля в зазоре. Для этого необходимо знать
оборотную частоту вращения электромагнитного поля статора и оборотную частоту
вращения ротора электрической машины переменного тока. Именно они определяют
требования к приборам вибрационного контроля.
Для этого необходимо знать
оборотную частоту вращения электромагнитного поля статора и оборотную частоту
вращения ротора электрической машины переменного тока. Именно они определяют
требования к приборам вибрационного контроля.
Максимальная частота вращения ротора электрической машины переменного тока определяется в размерности «обороты в минуту». В иностранной литературе широко используется термин RPM, что является сокращением стандартного параметра «Rotation Per Minute», т. е. те же «обороты в минуту». Эта максимальная частота вращения также является и номинальной, так как в нормальных условиях частота вращения машины переменного тока редко регулируется, а если и регулируется, то практически всегда с использованием преобразователей частоты.
Частота
вращения ротора численно равна произведению частоты питающей сети, измеряемой в
[Гц], умноженной на переводной коэффициент, равный 60 (количество секунд в одной
минуте). В России принят стандарт частоты питающей сети в 50 Гц. Поэтому максимально
возможная частота вращения роторов двигателей и генераторов переменного тока
составляет 3000 об/мин. При частоте питающей сети в 60 Гц, что являющейся
стандартной в Америке и в Японии, максимальная частота вращения ротора машины переменного
тока составит 3600 об/мин.
В России принят стандарт частоты питающей сети в 50 Гц. Поэтому максимально
возможная частота вращения роторов двигателей и генераторов переменного тока
составляет 3000 об/мин. При частоте питающей сети в 60 Гц, что являющейся
стандартной в Америке и в Японии, максимальная частота вращения ротора машины переменного
тока составит 3600 об/мин.
В зависимости от особенностей конструкции статоров машин переменного тока частота вращения электромагнитного поля в зазоре может изменяться. Для определения этой частоты формула определения частоты вращения поля должна быть дополнена еще одним сомножителем «Р», находящимся в знаменателе:
N0 = 60 * F1 / P
Таким
образом, частота вращения электромагнитного поля в зазоре электрической машины N0 равняется частному от деления максимальной частоты
вращения электромагнитного поля в зазоре на число «пар полюсов статора – Р». Это конструктивный параметр обмотки
статора, и он может принимать только целые значения, равные 1, 2, 3, 4, 5 и т.
д. При этом частота вращения поля в зазоре электрической машины будет равна
соответственно 3000 об/мин, 1500, 1000, 750, 600 и т. д.
Это конструктивный параметр обмотки
статора, и он может принимать только целые значения, равные 1, 2, 3, 4, 5 и т.
д. При этом частота вращения поля в зазоре электрической машины будет равна
соответственно 3000 об/мин, 1500, 1000, 750, 600 и т. д.
При числе пар полюсов, отличном от единицы, частота вращения поля в зазоре электрической машины отлична от частоты питающей сети, причем в меньшую сторону от стандартных 3000 об/мин. Это очень важно учитывать при первой диагностике состояния «мало знакомых» электрических машин по спектрам вибросигналов.
В синхронных электрических машинах
переменного тока частота вращения ротора всегда совпадает с частотой
вращения электромагнитного поля в зазоре. Именно поэтому такие машины
называются синхронными. Такие электрические машины имеют достаточно большую
мощность, что связано с особенностями их конструкции. Можно смело утверждать,
что «встретить» синхронную машину с мощностью менее 1000 кВт на практике очень
сложно. Их мало, но они имеют большую единичную мощность, генераторы достигают
мощностей до 800 МВт и более.
Можно смело утверждать,
что «встретить» синхронную машину с мощностью менее 1000 кВт на практике очень
сложно. Их мало, но они имеют большую единичную мощность, генераторы достигают
мощностей до 800 МВт и более.
В асинхронных машинах переменного тока частота вращения ротора всегда меньше частоты вращения электромагнитного поля в зазоре на небольшую величину, ротор отстает от электромагнитного поля. Это отставание обычно называется скольжением «s» и измеряется в долях от единицы или в процентах. Имеющаяся небольшая разница в частотах вращения поля и ротора называется частотой скольжения ротора, которая измеряется в герцах или в процентах. В диагностике дефектов ротора асинхронного двигателя эта частота имеет большое значение.
Стандартный
ряд рабочих частот вращения роторов асинхронных двигателей, в зависимости от числа
пар полюсов обмотки статора, можно примерно представить в виде последовательности
чисел — 2900 об/мин, 1450 об/мин, 970 об/мин.
Из этого ряда» хорошо видно, что частота вращения ротора асинхронной электрической машины всегда отстает от частоты вращения электромагнитного поля в зазоре электрической машины. Для сравнения напомним, что в синхронных машинах переменного тока, где частота вращения ротора совпадает с частотой вращения поля в зазоре, этот ряд рабочих частот вращения электрических машин составляет 3000, 1500, 1000 об/мин.
Отдельно необходимо остановиться на термине, который практические диагносты достаточно широко используют на практике, но, может быть, не совсем корректно понимают его смысл. В самом общем случае этот термин звучит примерно как «электромагнитные вибрации и электромагнитные гармоники в спектре вибрационного сигнала».
В
электрических машинах переменного тока возможно возникновение специфических
вибраций двух типов. Конечно, реальных причин повышения вибрации в
электродвигателях и генераторах может быть гораздо больше, но при измерении
вибрационных сигналов на опорных подшипниках реально зарегистрировать можно
только «отклики» от этих двух причин. В другом разделе нашего руководства мы частично
затронем некоторые другие аспекты вибрационной диагностики состояния
электротехнической составляющей электрических машин, здесь же мы рассмотрим
только способы диагностики возможных «механических дефектов» электрических
машин.
Конечно, реальных причин повышения вибрации в
электродвигателях и генераторах может быть гораздо больше, но при измерении
вибрационных сигналов на опорных подшипниках реально зарегистрировать можно
только «отклики» от этих двух причин. В другом разделе нашего руководства мы частично
затронем некоторые другие аспекты вибрационной диагностики состояния
электротехнической составляющей электрических машин, здесь же мы рассмотрим
только способы диагностики возможных «механических дефектов» электрических
машин.
Для начала дадим определение основным электромагнитным вибрациям, которые можно зарегистрировать на опорных подшипниках синхронных и асинхронных электрических машин. Как мы уже говорили, они могут возникать по нескольким причинам.
Во-первых, это электромагнитные вибрации
ферромагнитных сердечников и стальных конструктивных элементов
электротехнического оборудования, по которым во время работы оборудования
протекает переменный магнитный поток.
Эти вибрации возникают за счет специфического процесса, который в литературе называется магнитострикцией. Этот эффект обусловлен тем, что при перемагничивании ферромагнитных материалов сердечника происходит изменение внутренней ориентации элементарных намагниченных частиц, доменов. При каждом перемагничивании сердечника происходит поворот доменов на 180 градусов, что в итоге и приводит к небольшому «линейному расширению» ферромагнитного материала. Чем больше величина магнитного потока в сердечнике, тем больше размеры элементарных доменов в ферромагнитном сердечнике, и тем больше будут вибрации сердечника электрической машины.
Поскольку
перемагничивание сердечника магнитным потоком происходит дважды за один период
питающей сети, то и частота вибрации, обусловленная эффектом магнитострикции,
равняется удвоенной частоте питающей сети, т. е. она равняется 100 Гц. Мы
обращаем дополнительное внимание читателя на то, что вне зависимости от
оборотной частоты вращения ротора электрической машины, частота вибрации сердечника
(пакета стали статора) всегда равняется 100 Гц.
е. она равняется 100 Гц. Мы
обращаем дополнительное внимание читателя на то, что вне зависимости от
оборотной частоты вращения ротора электрической машины, частота вибрации сердечника
(пакета стали статора) всегда равняется 100 Гц.
Если оборотная частота ротора равняется 50 Гц, то гармоника электромагнитной вибрации располагается на спектре «в том месте», где может находиться вторая гармоника оборотной частоты. Если же оборотная частота ротора равняется, например, 25 Гц, то гармоника электромагнитной вибрации на спектре будет располагаться на месте четвертой гармоники оборотной частоты. Этими двумя простыми примерами мы еще раз подчеркнули, что электромагнитная гармоника не связана с частотой вращения ротора электрической машины, а зависит только от частоты питающей сети.
Во-вторых,
вибрации в электрической машине вызываются специфическими электродинамическими
силами, которые в литературе принято называть «амперовыми силами», т.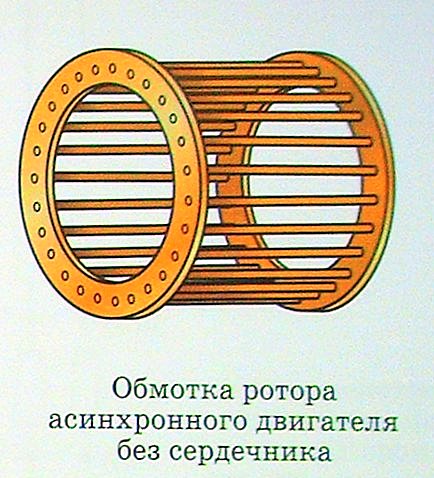 к. их
величина определяется по закону Ампера. Смысл закона Ампера звучит следующим
образом – на два проводника с током действует сила взаимного притяжения,
пропорциональная квадрату протекающего по проводникам тока, и обратно
пропорциональная расстоянию между проводниками. Если направление тока в обоих
проводниках одинаковое, то проводники притягиваются друг к другу. Если токи в
параллельных проводниках текут в разные стороны, то проводники отталкиваются
друг от друга.
к. их
величина определяется по закону Ампера. Смысл закона Ампера звучит следующим
образом – на два проводника с током действует сила взаимного притяжения,
пропорциональная квадрату протекающего по проводникам тока, и обратно
пропорциональная расстоянию между проводниками. Если направление тока в обоих
проводниках одинаковое, то проводники притягиваются друг к другу. Если токи в
параллельных проводниках текут в разные стороны, то проводники отталкиваются
друг от друга.
Самое
важное для нас в этом законе заключается в том, что в числителе стоит произведение
токов в проводниках, т. е. квадрат тока промышленной частоты. Из тригонометрии
следует известное соотношение, гласящее, что квадрат синусоидального сигнала
есть другой гармонический сигнал, но имеющий удвоенную частоту.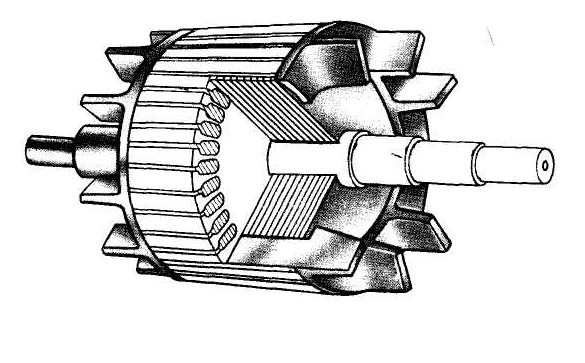 Таким образом,
мы аналогично получаем, что сила электродинамического воздействия между двумя
проводниками с синусоидальными токами промышленной частоты имеет удвоенную
частоту, относительно частоты питающей сети.
Таким образом,
мы аналогично получаем, что сила электродинамического воздействия между двумя
проводниками с синусоидальными токами промышленной частоты имеет удвоенную
частоту, относительно частоты питающей сети.
Таким образом, мы определили, что вибрации электрической машины, не вызванные механическими проблемами, имеют удвоенную частоту относительно частоты питающей сети, т. е. равную 100 Гц. Это определение относится как к электромагнитным причинам повышенной вибрации, возникающим в сердечниках электрических машин силами магнитострикции, так и к электродинамическим силам взаимодействия проводников друг с другом, возникающим при протекании токов по обмоткам электрической машины.
Все
это можно сказать несколько иначе. Основная, или, говоря терминами, принятыми в
вибрационной диагностике, оборотная частота электромагнитных сил и вибраций в
электрической машине равна удвоенной частоте питающей сети. Это совершенно
отдельная сила, не связанная с частотой вращения ротора, что может быть легко выяснено
при помощи средств кепстрального анализа. Она просто имеет частоту, равную
удвоенной частоте питающей сети. Гармоники основной частоты этой силы имеют
значения 200 Гц, 300, 400 и т. д. В чистом виде эта сила очень явно проявляется
в статическом электрооборудовании. Примером этого является трансформатор, в
котором гармоника вибрации с частотой питающей сети в 50 Гц практически
отсутствует, а максимальное значение имеет гармоника вибрации с частотой 100
Гц.
Это совершенно
отдельная сила, не связанная с частотой вращения ротора, что может быть легко выяснено
при помощи средств кепстрального анализа. Она просто имеет частоту, равную
удвоенной частоте питающей сети. Гармоники основной частоты этой силы имеют
значения 200 Гц, 300, 400 и т. д. В чистом виде эта сила очень явно проявляется
в статическом электрооборудовании. Примером этого является трансформатор, в
котором гармоника вибрации с частотой питающей сети в 50 Гц практически
отсутствует, а максимальное значение имеет гармоника вибрации с частотой 100
Гц.
Есть еще и третья (по порядку нашего повествования,
а не по порядковому номеру в спектре) гармоника вибрации, имеющая
электромагнитную природу возникновения. Она называется зубцово – пазовой
гармоникой. Она не всегда столь значительна, как первые две, но сказать о ней
все равно нужно.
Зубцово – пазовая гармоника вызывается особенностями конструктивного исполнения электрической машины переменного тока. У нее на статоре и на роторе обмотка всегда укладывается в пазах. При вращении ротора в зазоре статора возникает периодическое чередование ферромагнитных зубцов и пазов на статоре и роторе. Это приводит к модуляции магнитного потока в зазоре частотой, связанной с количеством пазов на роторе и статоре электрической машины.
При
разработке электрических машин принимаются все меры, чтобы исключить влияние зубцово
— пазовой структуры на работу машины. На статоре и роторе всегда различное
число пазов, на роторе применяется «скос» пазов, когда ось паза идет не вдоль
оси ротора, а как бы немного закручена вокруг оси и т. д. Тем не менее,
существуют типы электрических машин, в которых «пазовая» гармоника оборотной
частоты ротора является явно выраженной на спектре.
Необходимо хорошо понимать, что все эти три гармоники в спектре вибросигнала, имеющие электромагнитную природу возникновения, не всегда являются признаками наличия дефектов в контролируемой электрической машине, они практически всегда сопровождают ее работу. Признаком наличия дефекта обычно является увеличение амплитуд электромагнитных гармоник выше некоторого уровня, являющегося порогом нормального состояния оборудования.
Основной признак того, что анализируемая гармоника в спектре сигнала вибрации имеет электромагнитную причину возникновения — мгновенное исчезновение этой гармоники сразу после отключения электрической машины от сети.
Очень
важным является то, что диагностика причин повышенной вибрации электрических
машин должна проводиться при возможно большей нагрузке двигателя. Если исследования
будут проводиться на холостом ходу, или же при небольшой нагрузке, то диагностика
дефектов будет затруднена.
Если исследования
будут проводиться на холостом ходу, или же при небольшой нагрузке, то диагностика
дефектов будет затруднена.
3.2.6.2. Сводка электромагнитных проблем ротора и статора
Приведем краткую сводку по электромагнитным проблемам электрических машин, которые можно эффективно диагностировать по спектрам вибросигналов. Здесь же приведем все характерные признаки каждого вида дефекта.
Для описания дефектов здесь и далее будем использовать термины:
F1 — частота питающей сети, в России равна 50 Гц.
FЭМ — частота электромагнитных сил в электрических машинах, равна удвоенной частоте сети, в России 100 Гц.
N0 — частота вращения
поля в зазоре электрической машины, численно равна частному от деления 3000 на
число пар полюсов Р, которое может
принимать целые значения от единицы и более (об/мин).
F0 — частота электромагнитного поля в зазоре, Гц.
FP — собственная частота вращения ротора электрической машины. Для синхронных машин она равна частоте вращения поля. Для асинхронных машин она меньше на величину скольжения ротора.
FP = F0 (1 — s)
s - скольжение ротора относительно электромагнитного поля в асинхронных машинах, безразмерная величина, численно равняется разнице между частотой вращения поля в зазоре и частотой вращения ротора, отнесенной к частоте вращения поля в зазоре
s = (N0 — FP) / N0
FП — зубцово — пазовая
частота вибрации, численно равная произведению числа пазов (на роторе или
статоре) на частоту электромагнитного поля в зазоре. Может быть повышенной
относительно статора, относительно ротора, может быть разностная или суммарная
частота биений пазовых частот ротора и статора.
Может быть повышенной
относительно статора, относительно ротора, может быть разностная или суммарная
частота биений пазовых частот ротора и статора.
Наиболее важные проблемы статора, которые можно диагностировать на основе анализа вибрационных сигналов:
- Ослабление прессовки пакета стали, обрыв
или замыкание стержней, витков, или даже секций в обмотке статора. Соответствующие
вибрации проявляются на частоте действия электромагнитных сил FЭМ, равной удвоенной
частоте питающей сети. Особое внимание при диагностике такого дефекта следует
уделять наличию дробных гармоник электромагнитной частоты — 1/2, 3/2, 5/2 и т.
д. от основной частоты. По значению частоты эти гармоники соответствуют
основной и нечетным гармоникам питающей сети. Появление этих гармоник в спектре
вибрационного сигнала говорит об опасной степени развития дефекта, о необходимости
оперативного принятия соответствующих мер.

- Эксцентриситет, эллипсность внутренней
расточки статора относительно оси вращения ротора. Возникает обычно как дефект
монтажа подшипниковых стоек, дефект состояния подшипниковых щитов или при общей
деформации корпусных элементов самого статора. В вибрации проявляется на
частоте вращения поля в зазоре, а также и на частоте действия электромагнитных
сил в электрической машине, равной 100 Гц. Иногда сопровождается появлением
боковых гармоник вблизи частоты 100 Гц. Дефект обычно сопровождается неравенством
вертикальной и поперечной составляющих соответствующих гармоник. Пространственный максимум гармоник
соответствует направлению эксцентриситета смещения оси статора. Наиболее просто
направление смещения оси статора относительно оси ротора диагностируется при
снятии «розы вибраций», когда датчик последовательно перемещается по огибающей
вокруг подшипника со смещением при каждом измерении на угол 30 — 45 градусов.

- Неправильный взаимный осевой монтаж активных пакетов ротора и статора. Иногда для данного дефекта используется термин: «неправильная установка электромагнитных осевых разбегов». При работе электрической машины, в результате сил магнитного притяжения, пакет ротора всегда стремится к положению точно под пакетом статора.
Если этому стремлению будут препятствовать неправильно
смонтированные в осевом направлении подшипники, то в них будут возникать
компенсирующие осевые усилия, которые и вызовут осевые вибрации подшипников.
Подшипники достаточно быстро нагреются и выйдут из строя. Иногда ротор
двигателя «утягивается» в осевом направлении валом механизма, что возможно при
неправильном осевом монтаже приводного механизма, сопровождающемся малой осевой
подвижностью в соединительной муфте.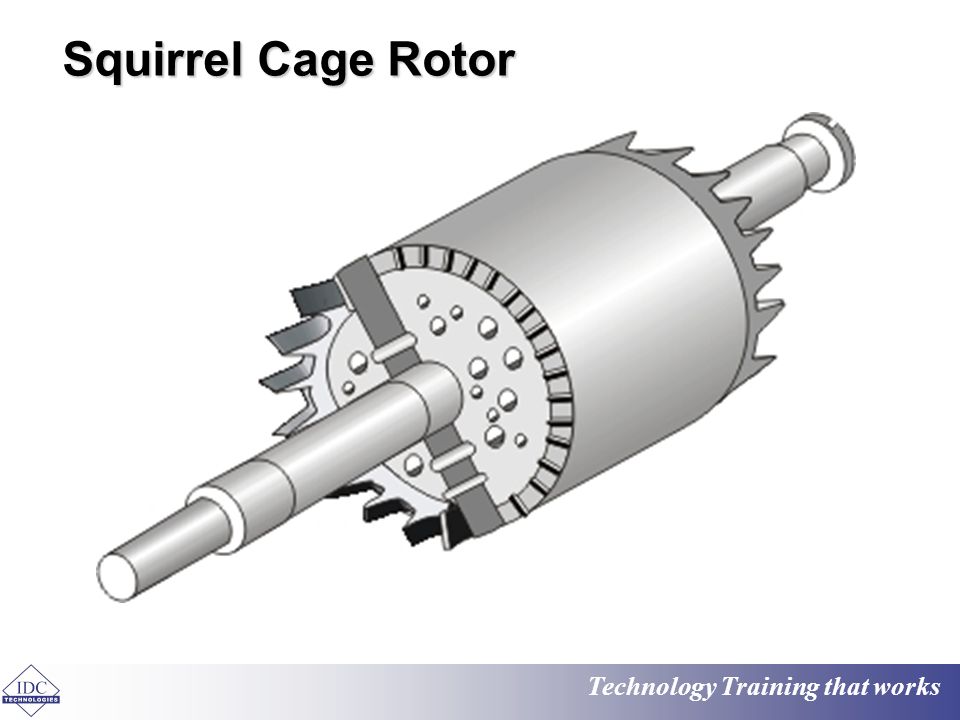
Основные проблемы ротора, диагностируемые по вибрации:
- Эксцентриситет внешней поверхности ротора относительно оси его вращения. На спектре вибросигнала этот дефект проявляется в усилении первой гармоники частоты вращения ротора. Усиливается частота действия электромагнитной силы, вокруг которой иногда появляются боковые гармоники, сдвинутые друг от друга на частоту скольжения ротора, умноженную на число полюсов.
- Обрыв или нарушение контакта в стержнях
или кольцах «беличьей клетки» в асинхронном двигателе. Обычно проявляется на
спектре вибрационного сигнала вблизи частоты вращения вала ротора. Кроме того, этот
дефект всегда сопровождается появлением вблизи основной гармоники частоты
вращения ротора боковых гармоник, сдвинутых относительно гармоники частоты
вращения ротора на интервал, равный произведению частоты скольжения на число
полюсов двигателя.
 Очевидно, что этот дефект присущ только асинхронным
двигателям, а в синхронных машинах он никак не проявляется.
Очевидно, что этот дефект присущ только асинхронным
двигателям, а в синхронных машинах он никак не проявляется. - Ослабление прессовки всего пакета стали ротора или только в области зубцов. Сопровождается усилением второй гармоники питающей сети или, при ослаблении стали в области зубцов, появлением пазовой частоты ротора с боковыми полосами, сдвинутыми друг от друга на частоту, равную двойной питающей частоте. Такой дефект на практике диагностируется достаточно сложно, так как его спектральные признаки напоминают признаки других дефектов, и проявляются не очень сильно, чаще всего неявно.
3.2.6.3. Диагностика электромагнитных проблем статора
При
всех проблемах статора синхронной или асинхронной электрической машины, имеющих
в своей основе первопричину электромагнитной природы, в спектре вибросигнала
возникает весьма специфическая картина. В основном она сопровождается
возникновением высокой амплитуды основной гармоники на частоте электромагнитных
процессов FЭМ. Как уже
неоднократно говорилось выше, ее частота равна удвоенной частоте питающей сети,
т. е. всегда равняется 100 Гц. Еще раз напоминаем, что эта частота никак не
связана с оборотной частотой вращения ротора.
В основном она сопровождается
возникновением высокой амплитуды основной гармоники на частоте электромагнитных
процессов FЭМ. Как уже
неоднократно говорилось выше, ее частота равна удвоенной частоте питающей сети,
т. е. всегда равняется 100 Гц. Еще раз напоминаем, что эта частота никак не
связана с оборотной частотой вращения ротора.
Этот
эффект достаточно хорошо объясняется с точки зрения физики происходящих в стали
статора процессов. Силы взаимного притяжения, действующие между «распрессоваными»
листами электротехнического железа или элементами крепления пакета стали, имеют
максимум амплитуды дважды за один период изменения питающей сети — во время абсолютного
минимума и максимума магнитного потока. Чем сильнее будет распрессован пакет статора
электрической машины, тем большую амплитуду в спектре будет иметь основная электромагнитная
гармоника.
Аналогично выглядит картина взаимодействия между элементами обмотки статора. Математически это объясняется тем, что электромагнитные силы пропорциональны квадрату тока или магнитного потока. Поскольку и тот и другой синусоидальны, то их произведение также пропорционально синусоиде, но изменяющейся уже с удвоенной частотой, относительно исходной частоты питающей сети.
На спектре вибрационного сигнала, приведенном на рисунке 3.2.6.1., картина появления электромагнитных проблем в статоре выражается в усилении пика на электромагнитной частоте. При значительных дефектах в стали могут появиться и вторая (200 Гц) гармоника электромагнитной частоты FЭМ, и даже третья (300 Гц).
Кроме
того, в спектре может появиться также целый ряд дробных гармоник, имеющих
кратность 1/2 от электромагнитной гармоники. В данной ситуации, по своей
частоте, эти гармоники будут численно соответствовать нечетным целым гармоникам
частоты питающей сети. Такое совпадение двух семейств гармоник усложняет их разделение
частоте, требуя большей внимательности и применения дополнительных диагностических
средств.
В данной ситуации, по своей
частоте, эти гармоники будут численно соответствовать нечетным целым гармоникам
частоты питающей сети. Такое совпадение двух семейств гармоник усложняет их разделение
частоте, требуя большей внимательности и применения дополнительных диагностических
средств.
Очень важно хорошо понимать и помнить основное различие синхронных и асинхронных электрических машин, значительно влияющих на диагностику дефектов по спектрам вибрационных сигналов.
Гармоники
вибрации от электромагнитных процессов в статоре синхронной машины, по своей физической
природе, являются синхронными относительно частоты вращения ротора. В
асинхронном двигателе эти же семейства гармоник являются несинхронными, т. к.
частота вращения ротора и частота питающей сети не кратны между собой, а
различаются между собой пропорционально частоте скольжения.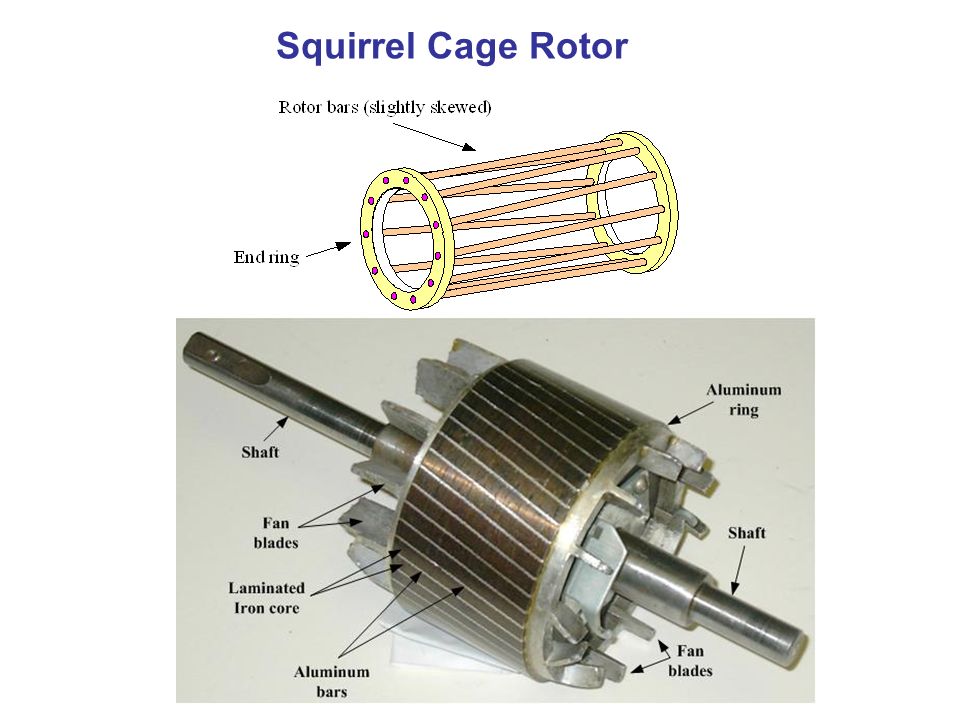 В данном
определении под коэффициентом кратности соотношений частот мы понимаем влияние
числа пар полюсов обмотки, уложенной в пазах статора.
В данном
определении под коэффициентом кратности соотношений частот мы понимаем влияние
числа пар полюсов обмотки, уложенной в пазах статора.
Ослабление прессовки активного железа статора в электрической машине обуславливается, в основном, двумя часто встречающимися причинами — или общим ослаблением элементов крепления железа статора, или же явлением «отслоения» крайних листов и пакетов стали.
При
этих локализациях дефекта железа статора важную роль начинает играть место
установки вибродатчика. Чем ближе он устанавливается к дефектному месту пакета
статора, чем короче будет путь прохождения «полезного» вибрационного сигнала,
тем более корректно можно будет проводить диагностирование и, достаточно часто,
удается даже локализовать место проявления дефекта. Наиболее эффективно датчик
вибрации устанавливать не на опорных подшипниках ротора, а непосредственно на
корпусе сердечника статора, а еще лучше и на самом пакете активной стали.
Наиболее эффективно датчик
вибрации устанавливать не на опорных подшипниках ротора, а непосредственно на
корпусе сердечника статора, а еще лучше и на самом пакете активной стали.
Аналогично обстоит дело и с особенностями проявления в спектрах вибросигналов различных дефектов обмоток статора, но поиск их и локализация происходят гораздо сложнее. Более подробно мы рассмотрим этот вопрос в другом разделе данного руководства, однако основные требования к месту установки датчика вибрации останутся прежними – как можно ближе к возможному месту возникновения предполагаемого дефекта пакета или обмотки статора.
Самое
главное, что нужно помнить при диагностике дефектов, что различить тип диагностируемого
в статоре электрической машины дефекта, имеет — ли он «чисто электрическую
природу возникновения», или же он обусловлен одними «магнитными проблемами»,
методами спектральной вибрационной диагностики практически невозможно.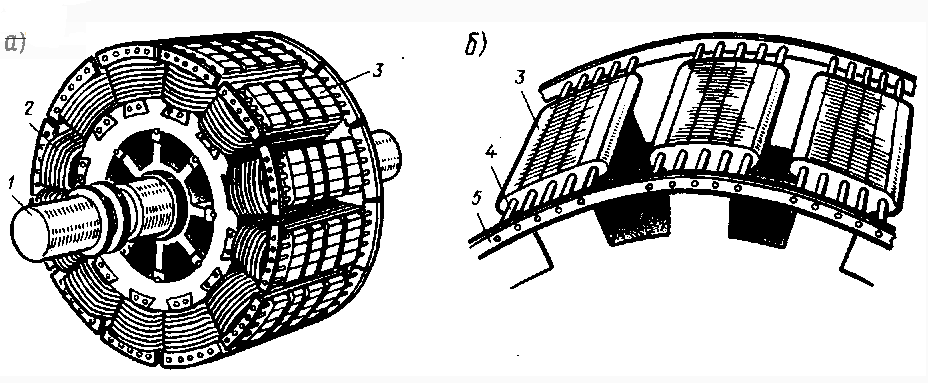 Единственный,
достаточно корректный признак наличия короткозамкнутого витка в обмотке статора
(электрическая причина возникновения повышенных вибраций) — наличие боковой
гармоники вблизи частоты 100 Гц, и ее чаще всего обнаружить не удается. В
большинстве практических случаев необходимо применение более специализированных
методов диагностики состояния электрических машин.
Единственный,
достаточно корректный признак наличия короткозамкнутого витка в обмотке статора
(электрическая причина возникновения повышенных вибраций) — наличие боковой
гармоники вблизи частоты 100 Гц, и ее чаще всего обнаружить не удается. В
большинстве практических случаев необходимо применение более специализированных
методов диагностики состояния электрических машин.
3.2.6.4. Проблемы эксцентричности пакета статора
Эксцентриситет
статора возникает чаще всего как дефект изготовления «шихтованного» пакета стали
статора, или как дефект монтажа статора. Очень высока вероятность возникновения
эксцентриситета статора в процессе монтажа электрической машины, особенно, если
статор и подшипниковые опоры монтируются раздельно. Данный дефект статора может
возникнуть в результате ослабления фундамента или как итог тепловых и иных
деформаций в агрегате и фундаменте.
Для примера на рисунке 3.2.6.2. приведен спектр вибросигнала, зарегистрированного на подшипнике асинхронного двигателя, имеющего номинальную частоту вращения ротора, равную n0 = 1480 об/мин. Этот спектр соответствует наличию в электрической машине достаточно развитого дефекта типа «эксцентриситет статора».
Эксцентриситет статора приводит, с точки зрения физики протекания электромагнитных процессов, к периодическому изменению магнитной проводимости воздушного зазора, к ее пульсации, или, говоря иными словами, к ее модуляции. Эта пульсация происходит с удвоенной частотой сети, т. е. с частотой воздействия электромагнитных сил.
Удвоение
частоты пульсации относительно питающей сети возникает из — за того, что мимо
зоны окружности статора, где произошло изменение величины зазора, поочередно
проходят и северный, и южный полюса электромагнитного поля, вращающегося в зазоре
электрической машины. Удвоенные пульсации магнитной проводимости приводят к
такой же пульсации магнитного потока и, как результат, к пульсации
электромагнитной силы и вибрации с частотой 100 Гц.
Удвоенные пульсации магнитной проводимости приводят к
такой же пульсации магнитного потока и, как результат, к пульсации
электромагнитной силы и вибрации с частотой 100 Гц.
Дополнительно несколько возрастает амплитуда гармоники на частоте вращения электромагнитного поля в зазоре. Это позволяет в асинхронных двигателях хорошо дифференцировать эксцентричность статора от эксцентричности ротора, где вибрация идет с частотой вращения ротора. Для выявления этого различия необходимо наличие спектроанализатора с хорошим разрешением.
Для
разделения эксцентриситетов статора и ротора в синхронной машине между собой,
при диагностике следует помнить, что эксцентриситет статора неподвижен в
пространстве и различен по амплитуде вибрации в направлениях измерения вибрации.
Благодаря такой локализации эксцентриситет статора приводит к возникновению
направленной в пространстве вибрации. Это можно выявить при помощи последовательного
перемещения вибродатчика по контролируемому подшипнику «вокруг вала».
Эксцентриситет же ротора всегда «вращается» вместе с ротором, поэтому он не
имеет стационарного максимума при определенном значении угла установки датчика.
При эксцентриситете статора такой максимум явно выражен.
Для
исключения проявления эксцентриситета в вибрации электрических машин необходимо,
чтобы воздушный зазор между статором и ротором должен быть неизменным по окружности.
Обязательно должно соблюдаться требование к качеству взаимного монтажа статора
и ротора, что различие в величине воздушного зазора вдоль окружности не должно
превышать значение в 5% для асинхронных двигателей и генераторов, и не
превышать 10 % для синхронных двигателей. Значение этого параметра жестко
контролируется при помощи специальных щупов при монтаже электрической машины. Такая процедура измерения должна производиться при нескольких взаимных
положениях ротора и статора.
Такая процедура измерения должна производиться при нескольких взаимных
положениях ротора и статора.
3.2.6.5. Эксцентричный ротор
Это достаточно часто встречающаяся в практике причина повышенной вибрации асинхронных электрических машин. У синхронных электрических машин переменного тока этот дефект менее заметен из-за больших рабочих зазоров.
При
наличии эксцентриситета ротора в характере распределения электромагнитного поля
в зазоре двигателя возникает ряд особенностей. Плотность электромагнитного поля
вдоль окружности зазора изменяется вместе с поворотом ротора. Это приводит,
из-за переменного зазора, к неравномерности тягового усилия двигателя. При
совпадении оси поля статора с зоной увеличенного зазора тяговое усилие
несколько уменьшается, при этом возрастает величина частоты скольжения. При
смещении оси поля в зону меньшего зазора тяговое усилие растет, частота
скольжения падает. При числе пар полюсов статора, большем единицы, такой
процесс повторяется «Р» раз.
При
смещении оси поля в зону меньшего зазора тяговое усилие растет, частота
скольжения падает. При числе пар полюсов статора, большем единицы, такой
процесс повторяется «Р» раз.
Если бы мы имели очень чувствительные приборы для измерения частоты вращения ротора, то мы бы обнаружили следующее. В интервале перемещения ротора от зоны, с увеличенным зазором в сторону зоны, с уменьшенным зазором, ротор бы ускорился в своей частоте вращения на небольшое значение. На интервале перехода ротора обратно, к зоне с увеличенным зазором, ротор бы замедлился на то же значение. Конечно, таких приборов у нас нет, но это видно на спектре с большой разрешающей способностью, где появляются признаки таких изменений скорости.
На
спектре вибросигнала, показанном на рисунке 3.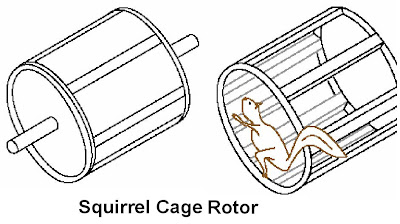 2.6.3., вокруг основной частоты
вращения ротора, должны появиться симметрично расположенные боковые пики,
гармоники, напоминающие зубцы короны. Симметрия пиков относительно основной
частоты достаточно хорошо понятна — это следствие «мини ускорений и мини замедлений»
частоты вращения ротора вокруг своего среднего значения. Аналогичные зубцы,
даже еще большей интенсивности, появляются и вокруг пика электромагнитной силы,
на частоте, равной второй гармонике питающей сети.
2.6.3., вокруг основной частоты
вращения ротора, должны появиться симметрично расположенные боковые пики,
гармоники, напоминающие зубцы короны. Симметрия пиков относительно основной
частоты достаточно хорошо понятна — это следствие «мини ускорений и мини замедлений»
частоты вращения ротора вокруг своего среднего значения. Аналогичные зубцы,
даже еще большей интенсивности, появляются и вокруг пика электромагнитной силы,
на частоте, равной второй гармонике питающей сети.
Необходимо пояснить причины проявления эксцентричности ротора на этой частоте.
Вращение
эксцентричного ротора модулирует проводимость зазора с удвоенной частотой. При
числе пар полюсов, равном единице частота вращения поля равна 50 Гц, удвоенная
частота сети, частота электромагнитной вибрации равна 100 Гц. Эксцентричность
ротора приводит
к модуляции электромагнитной силы. При уменьшении числа пар полюсов частота
вращения поля в зазоре уменьшится в Р раз. Переменный зазор ротора за один свой оборот будет модулировать электромагнитную
силу 2 х Р раз больше частоты своего
вращения, что как раз и соответствует частоте электромагнитной силы.
Эксцентричность
ротора приводит
к модуляции электромагнитной силы. При уменьшении числа пар полюсов частота
вращения поля в зазоре уменьшится в Р раз. Переменный зазор ротора за один свой оборот будет модулировать электромагнитную
силу 2 х Р раз больше частоты своего
вращения, что как раз и соответствует частоте электромагнитной силы.
Эксцентричный ротор генерирует вокруг FP и вокруг FЭМ семейства гармоник, представляющих из себя пики, сдвинутые на одинаковый шаг по частоте. Сдвиг между этими гармониками равен произведению частоты скольжения на число полюсов обмотки статора
DF = FS * 2 * P
Причина
такого шага между зубцами на спектре по частоте достаточно корректно объясняется. Частота скольжения есть разностная частота биений между частотой вращения поля
и частотой вращения ротора. В течении одного оборота эксцентриситет ротора
влияет «2 х Р» раз на тяговое усилие
двигателя, которое связано с частотой скольжения ротора. Сама частота скольжения FS иногда видна на
спектре, на начальном участке, на самой низкой частоте. Она проявляется обычно
в диапазоне от 0,3 до 2,0 Гц. Для ее регистрации нужен низкочастотный датчик.
Частота скольжения есть разностная частота биений между частотой вращения поля
и частотой вращения ротора. В течении одного оборота эксцентриситет ротора
влияет «2 х Р» раз на тяговое усилие
двигателя, которое связано с частотой скольжения ротора. Сама частота скольжения FS иногда видна на
спектре, на начальном участке, на самой низкой частоте. Она проявляется обычно
в диапазоне от 0,3 до 2,0 Гц. Для ее регистрации нужен низкочастотный датчик.
Необходимо
помнить, что во временном сигнале эксцентриситет ротора проявляется в виде
пульсирующей вибрации, средняя частота которой располагается в диапазоне частот
(или вблизи него) между FЭМ и
гармоникой оборотной частоты ротора, по частоте чуть меньшей, чем у
электромагнитной силы (порядковый номер этой гармоники ротора равен удвоенному
числу пар полюсов статора). Разделить эти гармоники на спектре можно только при
высоком частотном разрешении используемого анализатора вибрационных сигналов.
Разделить эти гармоники на спектре можно только при
высоком частотном разрешении используемого анализатора вибрационных сигналов.
Эксцентричность ротора обычно проявляется и в вертикальной, и в поперечной проекции вибрации. Иногда ее удается обнаружить даже и в осевой проекции. Так бывает при наличии эксцентричности ротора не по всей его длине, а только в районе одного, если смотреть вдоль оси ротора, края пакета электротехнической стали.
Эксцентричность
ротора часто носит нестационарный характер, когда в спектре работающего двигателя
имеется характерная картина, а практические измерения зазора не подтверждают
диагноз. Причина здесь обычно в термических процессах, когда по тем или иным
причинам ротор несимметрично нагревается, изгибается и дает картину
эксцентриситета.
После останова двигателя, в процессе его разборки для измерения зазора, температуры быстро выравниваются и диагноз не подтверждается. Часто так бывает при обрывах стержней или «частичных задеваниях» ротора об неподвижные элементы, когда ротор так же начинает односторонне нагреваться.
3.2.6.6. Неправильный осевой монтаж двигателя
Принцип действия всех электрических машин переменного тока примерно одинаков - вращающий момент создается за счет взаимодействия магнитного поля статора с магнитным полем ротора (синхронные машины) или с роторными проводниками с током (асинхронные машины).
Простейший
аналог, характеризующий работу синхронной электрической машины переменного тока
– притяжение двух постоянных магнитов, из которых один есть вращающееся
магнитное поле статора, а второй жестко зафиксирован на роторе. В асинхронной машине
переменного тока все выглядит немного иначе – вращающееся магнитное поле
статора увлекает за собой проводники с током, которыми являются стержни
короткозамкнутой клетки ротора.
В асинхронной машине
переменного тока все выглядит немного иначе – вращающееся магнитное поле
статора увлекает за собой проводники с током, которыми являются стержни
короткозамкнутой клетки ротора.
В
синхронном электродвигателе машине энергия подается одновременно в ротор от
источника постоянного тока, и в статор из питающей промышленной сети. В асинхронном
электродвигателе внешняя энергия подается только из питающей сети в статор,
поэтому для работы двигателя часть энергии должна быть передана (трансформирована)
через зазор во вращающийся ротор. Только в этом случае возникает
электромагнитное взаимодействие между полями ротора и статора. Наличие передачи
энергии через зазор объясняет необходимость максимального уменьшения воздушного
зазора в асинхронных машинах, а так же их большую чувствительность этого типа
электрических машин к нелинейности величины зазора между ротором и статором.
Сила взаимного притяжения между ротором и статором является векторной величиной и состоит из трех составляющих — радиальной составляющей, касательной, полезной, и осевой. Касательная составляющая электромагнитной силы в зазоре является полезной, т. к. именно она создает вращающий момент. Радиальная составляющая есть сила притяжения ротора к статору и при постоянстве величины воздушного зазора эти силы, диаметрально противоположно, взаимно компенсируются.
Рассмотрим
чуть подробнее осевую составляющую сил взаимного притяжения в зазоре электрической
машины. Если магнитные сердечники ротора и статора в осевом направлении расположены
непосредственно друг против друга, то и суммарная осевая составляющая силы
электромагнитного притяжения ротора и статора равна нулю. Иначе будет происходить
в том случае, когда произойдет взаимное осевое смещении сердечников ротора и статора. При этом итоговая осевая сила не будет равна нулю, она будет стремиться вернуть
ротор в исходное нейтральное положение. Чем больше будет величина осевого
смещения, тем больше будет величина осевого усилия, втягивающего ротор внутрь
статора.
При этом итоговая осевая сила не будет равна нулю, она будет стремиться вернуть
ротор в исходное нейтральное положение. Чем больше будет величина осевого
смещения, тем больше будет величина осевого усилия, втягивающего ротор внутрь
статора.
Величина допустимого свободного осевого перемещения ротора относительно статора определяется особенностями монтажа опорных подшипников ротора. Она максимальна при использовании подшипников скольжения, и минимальна при использовании подшипников качения, особенно радиально – упорного типа.
Если
осевая подвижность ротора достаточна для перемещения его в нейтральное положение,
то проблем с увеличением вибраций не будет. Если же возникнет препятствие к
такому осевому перемещению, то на нем возникнет значительная осевая вибрация.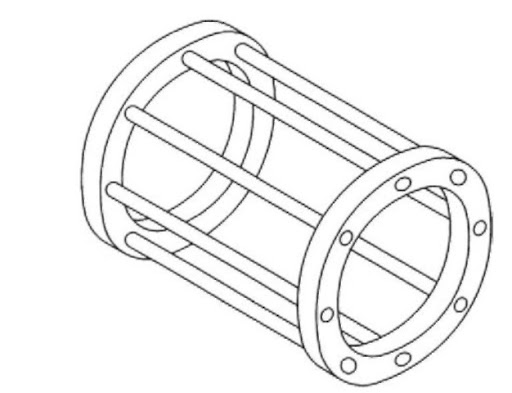 Частота этой вибрации, как это показано на рисунке 3.2.8.4., обычно равняется частоте
электромагнитных сил. Иногда гармоники вибрации возникают и частоте вращения
ротора, это зависит от состояния поверхностей в месте препятствии к осевому
смещению. Наиболее часто такая проблема возникает у асинхронных электродвигателей
с подшипниками качения, осевая подвижность которых почти нулевая.
Частота этой вибрации, как это показано на рисунке 3.2.8.4., обычно равняется частоте
электромагнитных сил. Иногда гармоники вибрации возникают и частоте вращения
ротора, это зависит от состояния поверхностей в месте препятствии к осевому
смещению. Наиболее часто такая проблема возникает у асинхронных электродвигателей
с подшипниками качения, осевая подвижность которых почти нулевая.
Осевая вибрация в электродвигателях, оборудованных подшипниками качения, обычно возникает при следующих основных причинах:
- При осевом смещении магнитных пакетов статора и ротора, обусловленном особенностями их взаимного первичного монтажа.
- При неполной посадке подшипников на вал, или в подшипниковых щитах, после проведения ремонтных работ.
- При смещении подшипниковых щитов, или посадочных мест подшипников после выполнения
ремонтных и восстановительных работ.
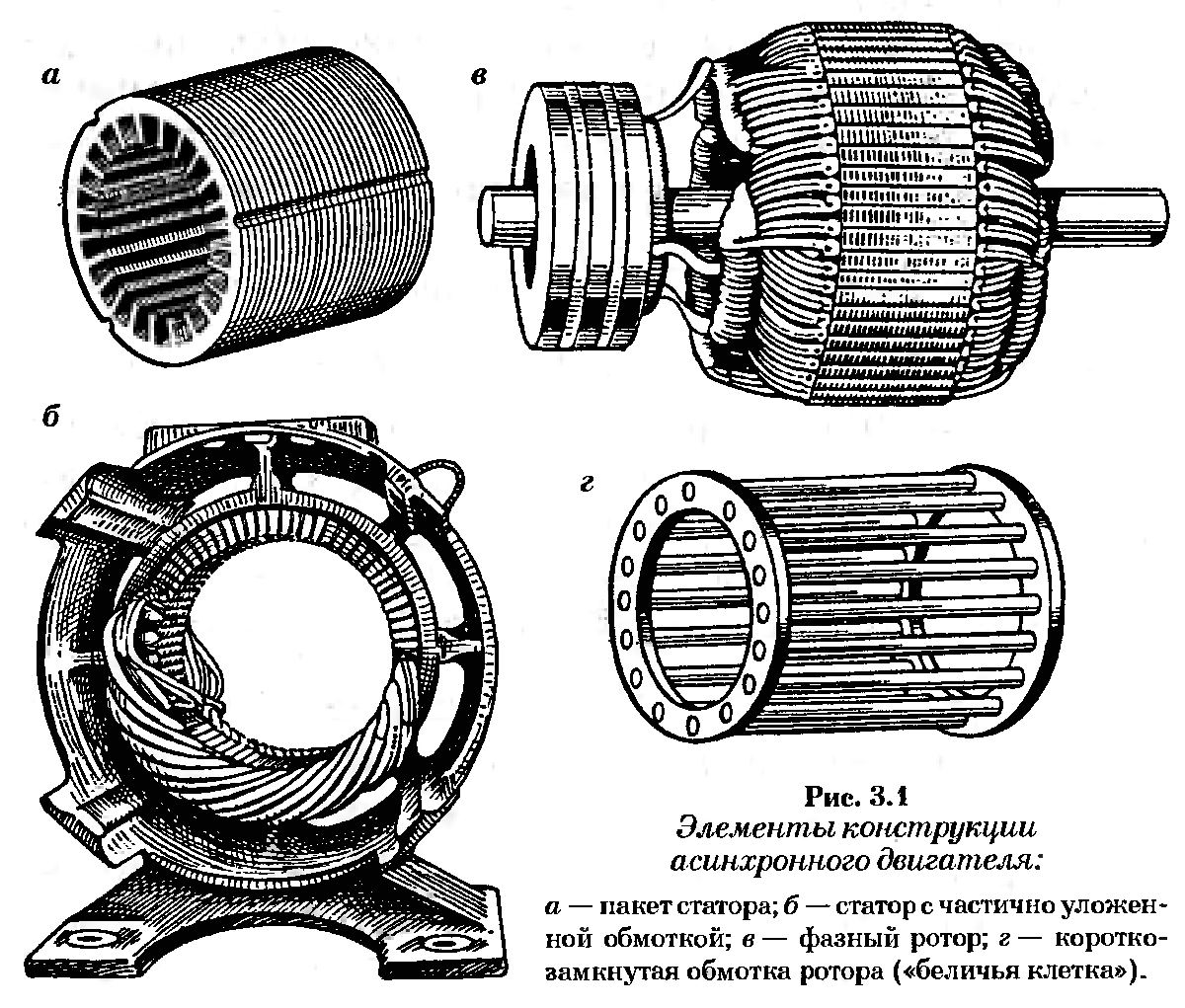
Вне зависимости от причины возникновения повышенных осевых усилий на опорные подшипники качения, это довольно опасный дефект. Большинство подшипников качения не предназначены для компенсации осевых усилий, и поэтому в такой ситуации достаточно быстро выходят из строя.
У подшипников скольжения обычно существует больший конструктивный «осевой разбег», поэтому осевые вибрации в них возникают гораздо реже. Кроме того, подшипники скольжения обычно используются в крупных синхронных электрических машинах, в которых вопрос компенсации осевых усилий, по причине наличия больших воздушных зазоров, стоит менее остро.
Тем
не менее, и в таких условиях осевая подвижность подшипников скольжения может
оказаться недостаточной для компенсации дефектов монтажа. В таком случае
возникает осевая вибрация, обычно выражающаяся в возникновении трения галтели
вала о торцевую поверхность подшипникового вкладыша.
В таком случае
возникает осевая вибрация, обычно выражающаяся в возникновении трения галтели
вала о торцевую поверхность подшипникового вкладыша.
Для устранения осевой вибрации в насосных агрегатах необходимо корректно и комплексно выставлять при монтаже все три так называемых в практике «осевых разбега», расположенных в насосе, в муфте и в электродвигателе.
Достаточно часто вал электродвигателя «утягивается в осевые вибрации» валом насоса при дефектах системы осевой разгрузки рабочего колеса насоса. Парадокс диагностики — дефект в насосе, а вибрация в двигателе.
На
практике бывают случаи, когда для борьбы с осевыми вибрациями ротор в подшипниках
скольжения, перед пуском, принудительно смещают в осевом направлении, например,
при помощи лома, и после этого двигатель некоторое время хорошо работает. С течением
времени, в процессе работы, ротор смещается обратно, и осевые вибрации агрегата
снова возрастают до прежнего значения.
3.2.6.7. Обрыв стержней ротора
Наиболее распространенным конструктивным исполнением обмотки ротора асинхронного двигателя является короткозамкнутый ротор с «беличьей клеткой». У такого ротора в пазах, без изоляции, забиваются медные или латунные стержни, или же пазы полностью залиты сплавом алюминия. Концы стержней, по торцам ротора, объединяются замыкающими кольцами из такого же материала.
В
процессе работы, а особенно при пуске асинхронного электродвигателя, по стержням
беличьей клетки протекает большой ток, и они сильно нагреваются. Частой причиной
выхода из строя двигателя является нарушение контакта стержней с замыкающими
кольцами, называемые в практике «отгоранием стрежней». Появление такого дефекта
в отдельных стержнях приводит к увеличению нагрузки на оставшиеся стержни, дополнительному
перегреву их, и также к последующему «отгоранию», и т. д. Весь этот
лавинообразный процесс разрушения обмотки ротора сопровождается потерей
мощности электродвигателя, к его постепенному перегреву и выходу из строя.
Появление такого дефекта
в отдельных стержнях приводит к увеличению нагрузки на оставшиеся стержни, дополнительному
перегреву их, и также к последующему «отгоранию», и т. д. Весь этот
лавинообразный процесс разрушения обмотки ротора сопровождается потерей
мощности электродвигателя, к его постепенному перегреву и выходу из строя.
Выявление начальных признаков повреждений стержней клетки ротора является очень актуальной задачей и позволяет повысить надежность работы асинхронных двигателей с короткозамкнутой клеткой на роторе.
Рассмотрим особенности физических процессов и вибрационных признаков этого в роторе, имеющем характерные признаки начальной стадии данного дефекта. Будем считать, что повредился один стержень короткозамкнутой клетки.
Необходимо
сразу же сказать, что спектр вибрации асинхронного электродвигателя с
отгоревшим стержнем во многом похож на спектр вибрации двигателя, имеющего эксцентричный
ротор. На первый взгляд между этими дефектами мало общего, но при ближайшем
рассмотрении можно выявить причины возникновения сходства вибрационных сигналов,
зарегистрированных на опорных подшипниках.
На первый взгляд между этими дефектами мало общего, но при ближайшем
рассмотрении можно выявить причины возникновения сходства вибрационных сигналов,
зарегистрированных на опорных подшипниках.
Как и при эксцентричном роторе, отгоревший стержень приводит к модулированию величины тягового усилия двигателя. В момент прохождения зоны отгоревшего стержня мимо электромагнитного полюса (скорее наоборот, т. к. поле асинхронного электродвигателя обгоняет ротор) тяговое усилие импульсно уменьшиться, ротор чуть-чуть замедлится. В это время под полюс поля подойдет зона бездефектного стержня, в нем за счет возросшего скольжения будет несколько больший ток, тяговое усилие также импульсно возрастет, и ротор чуть-чуть ускорится.
Эти
импульсные мини ускорения и мини замедления ротора на спектре будут характеризоваться возникновением боковых зубцов вокруг основной
гармоники частоты вращения ротора. Такой спектр для двигателя с частотой вращения
ротора 2920 об/мин показан на рис 3.2.6.5. Понятно, что зубец (гармоника) с
чуть меньшей частотой будет соответствовать моменту времени с замедлением, а
зубец (гармоника) с чуть большей частотой будет принадлежать участку времени с
ускорением ротора.
Сразу же напрашивается аналогия, что если поврежденных стержней в роторе будет не один, а два, то боковых гармоник будет по две с каждой стороны оборотной частоты, если будет три дефектных стержня – три пары боковых гармоник, и так далее. Это так, и не так. Примерно в половине практических случаев такой эффект соответствия количества дефектных стержней и боковых гармоник будет соблюдаться, а в половине случаев такого количественного соответствия не будет.
Корректное
описание такой особенности картины спектрального отображения «дефектных» стержней
на спектре вибрационных сигналов является очень сложным, и мы его здесь
опустим. Мы ограничимся простой констатацией факта, что если боковых гармоник
на спектре более двух (пар), то на роторе находится больше двух отгоревших
стержней, или, говоря точнее, стержней с дефектами контакта. Если боковых
гармоник всего две, то количество стержней с дефектами точно не определено.
Разделить две причины повышенной вибрации, о которых мы начали рассуждение, это эксцентриситет ротора и отгоревшие стержни беличьей клетки, возможно, но только при наличии у диагноста «хорошего анализатора спектров вибрационных сигналов». В данном случае речь идет о хорошем спектральном разрешении прибора, он должен рассчитывать спектры с разрешением не хуже 3200 частотных линий. В этом случае дефекты можно разделить, учитывая особенности различия их спектрах вибрационных сигналов.
Это следующие различия:
- Характерная «корона» из зубцовых гармоник вокруг пика электромагнитной частоты
FЭМ проявляется на спектре различно
— при эксцентриситете ротора она имеется во всех режимах работы диагностируемой
электрической машины.
 При наличии в роторе дефекта типа «дефектный стержень»,
корона на спектре появляется только при значительной нагрузке электрической
машины, на холостом ходу она отсутствует.
При наличии в роторе дефекта типа «дефектный стержень»,
корона на спектре появляется только при значительной нагрузке электрической
машины, на холостом ходу она отсутствует. - При эксцентриситете ротора «корона» практически симметрична по величинам зубцовых гармоник относительно центрального пика, а при дефектах стержней пик на меньшей частоте всегда меньше «зеркального» пика на большей частоте. Этот факт достаточно хорошо сообразуется с картиной физических процессов. Уменьшение скорости происходит при нормальном скольжении и нормальном токе в последнем (перед дефектным) «хорошем» стержне клетки. Ускорение же ротора происходит при увеличенном скольжении, большем токе в первом «хорошем» стержне и, как результат, с большим ускорением.
- За счет колебательного «успокоения» пульсации частоты вращения ротора, после
прохождения стержня с дефектом, что может возникать при определенных параметрах
нагрузки на валу электродвигателя, на спектре вибрационного сигнала может
возникнуть несколько гармоник частоты вращения ротора, и обычно все они
окружены «коронами».
 Такая же картина может возникать при наличии механических
или электромагнитных ослаблений в электрической машине. Параметр
«электромагнитное ослабление» раскрывать мы не будем из-за его специфичности,
оставив его для исследования специалистам по электрическим машинам.
Такая же картина может возникать при наличии механических
или электромагнитных ослаблений в электрической машине. Параметр
«электромагнитное ослабление» раскрывать мы не будем из-за его специфичности,
оставив его для исследования специалистам по электрическим машинам.
В
качестве численного ограничения степени проявления этого дефекта можно считать,
что «короны» у исправного двигателя быть не должно. Если она появилась, и
наибольший пик «короны» превысил 10 % от центрального пика — вероятность
существования отгоревших стержней в обмотке ротора очень большая. Для контроля количественного
значения признаков этого дефекта лучше использовать спектры с логарифмической
шкалой по амплитуде. Если на нем пики «короны» будут меньше основного пика
менее, чем на 20 dВ, то предполагаемый дефект имеет место.
В заключение, подчеркивая особенности диагностики данной причине повышенной вибрации, необходимо еще раз указать, что такая диагностика возможно только с применением анализаторов спектров с высокой разрешающей способностью. Это нужно для разделения на спектре частот вращения поля, ротора и боковых гармоник. Центральный пик «короны» должен соответствовать частоте вращения ротора, а не быть равным частоте вращения поля в зазоре.
3.2.6.8. Дефекты зубцово — пазовой структуры
Такая неисправность не очень часто встречается в практике, но, тем не менее, ее можно достаточно просто описать и успешно диагностировать.
Условно
эту неисправность можно представить в виде ротора, у которого отсутствует один
ферромагнитный зуб.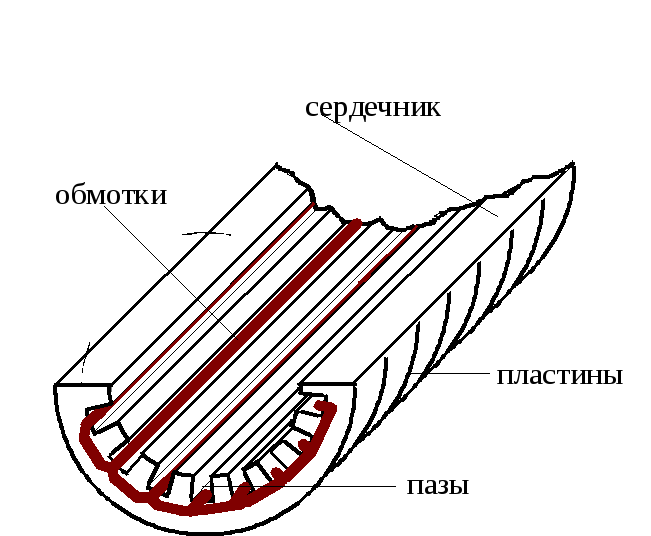 Это приводит к тому, что мимо пазов статора перемещается «магнитный
непериодический» элемент, наводящий в обмотке статора импульсы, число которых
за один оборот будет численно равно числу пазов на статоре. На спектре вибрационного
сигнала это будет представлено пиком на частоте, равной произведению частоты вращения
ротора на число пазов статора.
Это приводит к тому, что мимо пазов статора перемещается «магнитный
непериодический» элемент, наводящий в обмотке статора импульсы, число которых
за один оборот будет численно равно числу пазов на статоре. На спектре вибрационного
сигнала это будет представлено пиком на частоте, равной произведению частоты вращения
ротора на число пазов статора.
Не
вдаваясь в тонкости физического описания, следует также сказать, что дефектный
зуб будет модулировать и электромагнитную силу статора. Это будет происходить потому,
что дважды за свой один оборот вращающееся поле «будет натыкаться» на дефект магнитной
проводимости воздушного зазора двигателя, на «отсутствующий» зуб ротора. На спектре
вблизи пика зубцовой частоты появятся два зеркально расположенных пика,
сдвинутых относительно своего «главного пика» на частоту электромагнитной силы
FЭМ, как уже неоднократно
говорилось равную удвоенной частоте питающей сети.
Наиболее сложным для диагностики будет спектр вибрации при наличии магнитных дефектов на роторе и статоре одновременно, причем дефектов множественных. На спектре будут присутствовать зубцовые частоты ротора и статора, а также будут частоты их биения, зашумленные множественными «зеркальными» пиками.
«Положительным» при этом будет то, что при таком дефекте обычно сильно падает тяговое усилие, возрастает потребляемый ток и двигатель очень быстро выходит из строя, обычно раньше, чем персоналу удается записать спектры и выявить множественный магнитный дефект методами вибрационной диагностики.
Приборы нашего производства для диагностики электромагнитных дефектов
- ViAna-4 – универсальный 4-хканальный регистратор и анализатор вибросигналов, диагностика электромагнитных дефектов по току
Что такое двигатель с короткозамкнутым ротором и как он работает?
Электродвигатели — это машины, преобразующие электрическую энергию в механическую, и в настоящее время они доминируют в современной промышленности. Они просты в использовании, имеют простой дизайн и бывают разных форм, что позволяет им добиться успеха практически в любой ситуации. Электродвигатели могут питаться от постоянного (DC) или переменного (AC) тока, и в этой статье будет рассмотрен конкретный двигатель переменного тока, известный как двигатель с короткозамкнутым ротором. Эти двигатели представляют собой особый тип асинхронных двигателей, которые используют эффект электромагнитной индукции для преобразования электрического тока в энергию вращения (дополнительную информацию можно найти в нашей статье об асинхронных двигателях).В этой статье объясняются принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются. Таким образом, дизайнеры могут сделать осознанный выбор при выборе правильного двигателя.
Что такое двигатели с беличьей клеткой?
Двигатели с короткозамкнутым ротором — это подкласс асинхронных двигателей, которые используют электромагнетизм для создания движения. Это так называемые двигатели с «короткозамкнутым ротором», потому что форма их ротора — внутреннего компонента, соединенного с выходным валом — напоминает клетку.Две круглые торцевые крышки соединены стержнями ротора, на которые действует электромагнитное поле (ЭМП), создаваемое статором, или внешним корпусом, состоящим из многослойных металлических листов и намотки проволоки. Статор и ротор являются двумя основными частями любого асинхронного двигателя, а беличья клетка — это просто один из способов использования эффекта электромагнитной индукции. Переменный ток, проходящий через статор, создает ЭДС, которая колеблется с частотой переменного тока, которая «вращается» вокруг ротора, вызывая противоположные магнитные поля в стержнях ротора, вызывая движение.
Как работают двигатели с беличьей клеткой?
По сути, двигатели с короткозамкнутым ротором работают не иначе, чем большинство других асинхронных двигателей, и отличаются только конкретным взаимодействием между ротором и статором. Наша статья об асинхронных двигателях содержит обсуждение основных законов, лежащих в основе всех асинхронных двигателей, и дает понимание того, как движение создается за счет магнетизма.
Двигателис короткозамкнутым ротором максимизируют электромагнитную индукцию за счет использования стержней ротора для взаимодействия с ЭДС статора.Статор обычно содержит обмотки из проволоки, по которым протекает переменный ток; этот ток изменяется синхронно с синусоидальной кривой (или «чередуется»), которая изменяет направление тока в обмотках провода. Когда ток колеблется, генерируемая ЭДС будет следовать его примеру и в некоторых случаях заставит его «вращаться» с частотой, подобной частоте переменного тока. Эта вращающаяся ЭДС создает противоположное напряжение и ЭДС в стержнях ротора, тем самым толкая ротор, создавая вращательное движение.
Этот ротор не вращается с точной частотой переменного тока, поэтому двигатели с короткозамкнутым ротором (как и другие асинхронные двигатели) считаются асинхронными. Всегда есть некоторая потеря или «проскальзывание» между частотой переменного тока и частотой вращения вала, и это является следствием в первую очередь того, почему ротор вращается. Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения. Ротор всегда должен работать медленнее, чтобы почувствовать эффект электромагнитной индукции, как если бы ротор постоянно играл в магнитную игру «догонялки».Чтобы узнать больше, посетите нашу статью о типах двигателей переменного тока.
Характеристики двигателя с короткозамкнутым ротором
Наша статья об асинхронных двигателях объясняет спецификации для всех типов асинхронных двигателей и является хорошим местом, чтобы увидеть все различные характеристики асинхронных двигателей. В этой статье основное внимание будет уделено тому, что необходимо указать для асинхронных двигателей с короткозамкнутым ротором, а именно фазе, скорости, крутящему моменту и току. Поскольку эти двигатели пользуются огромной популярностью, NEMA и IEC разработали стандартизованные классы двигателей с короткозамкнутым ротором на основе их характеристик скорости и момента.Это позволяет производить взаимозаменяемые двигатели между производителями и упрощает замену двигателей. Эти принципы, а также различные классы стандартных двигателей с короткозамкнутым ротором будут кратко объяснены ниже.
Тип фазы
Асинхронные двигателимогут приводиться в действие однофазным (одна частота переменного тока) или многофазным (несколько частот переменного тока) в зависимости от входного источника питания. Некоторые из наиболее распространенных типов двигателей с короткозамкнутым ротором используют три фазы, что означает, что входной ток представляет собой три идентичных частоты переменного тока, разделенных на 120 градусов по фазе.Трехфазные двигатели являются самозапускающимися, что означает, что единственным необходимым входом является пусковое напряжение, что делает эти двигатели, по сути, самозапускающимися. Однофазные двигатели также распространены, но они не самозапускаются и требуют некоторого начального толчка. Это связано с тем, что одной частоты переменного тока недостаточно для создания действительно «вращающейся» ЭДС, и необходимо выполнить некоторую компенсацию для имитации вращающегося поля. Это можно сделать с помощью пускателей, которые могут быть конденсаторами, разделенными фазами или другими компонентами. Подробнее о пускателях можно прочитать в нашей статье о типах пускателей двигателей.
Крутящий момент двигателя и кривая крутящего момента-скорости
Хотя двигатели с короткозамкнутым ротором работают с базовыми скоростями и крутящими моментами, им необходимо достичь этого установившегося состояния посредством некоторого переходного пуска. Этот запуск, обычно визуализируемый посредством кривой крутящего момента — скорости, жизненно важен, поскольку он определяет, с какими рабочими условиями может работать двигатель. На рисунке 1 ниже показаны важные участки кривой крутящий момент-скорость для любого асинхронного двигателя.
Рис. 1: Кривая крутящий момент-скорость для асинхронных двигателей с обозначенными важными участками.
Пусковой крутящий момент — это крутящий момент при запуске двигателя. Вытягивающий или разрушающий момент — это максимальный крутящий момент, достигаемый перед максимальной скоростью. Номинальный крутящий момент — это выходной крутящий момент в установившемся режиме, который обычно указан на паспортной табличке двигателя. Разница между синхронной скоростью и скоростью, достигаемой при номинальном крутящем моменте, определяет скольжение двигателя.
Классы NEMA для многофазных асинхронных двигателей с короткозамкнутым ротором
Рисунок 2: Кривые крутящий момент-скорость для двигателей стандартных классов NEMA.
Таблица 1: Обобщенные характеристики стандартных двигателей NEMA с короткозамкнутым ротором.
Стандарт NEMA S.C.I.M. | Пусковой крутящий момент | Пусковой ток | Квитанция |
Класс A | Нормальный | Нормальный | Нормальный |
Класс B | Нормальный | Низкая | Нормальный |
класс C | Высокая | Низкая | Нормальный |
Класс D | Высокая | Низкая | Высокая |
На рис. 2 показаны кривые для двигателей с короткозамкнутым ротором различных классов NEMA.Существует четыре основных класса (A, B, C и D), хотя их больше в зависимости от специфики. Эти четыре класса приведены в таблице 1 с точки зрения их пускового момента, тока и величины скольжения. Существуют и другие нестандартные двигатели с короткозамкнутым ротором, но они обычно изготавливаются в соответствии со спецификациями покупателя.
Двигателикласса A являются наиболее популярным типом двигателей с короткозамкнутым ротором. У них нормальный пусковой момент и ток, а также скольжение менее 5% от синхронной скорости. Распространенными приложениями являются вентиляторы, компрессоры, конвейеры и другие устройства с низкой инерционной нагрузкой, которые позволяют быстро разгонять двигатель.
Двигателикласса B можно запускать при полной нагрузке, что делает их полезными для высокоинерционных применений (большие вентиляторы, центробежные насосы и т. Д.). У них нормальный пусковой момент, более низкий пусковой ток, чем у двигателей класса A, и скольжение менее 5% при полной нагрузке. Эти двигатели иногда взаимозаменяемы с двигателями класса А, особенно когда требуется пониженное пусковое напряжение.
Двигателикласса C имеют высокий пусковой момент и низкий пусковой ток благодаря конструкции ротора с двойной обоймой. Из-за этого улучшения они более дорогие, чем двигатели классов A и B, но также обладают способностью выдерживать высокие пусковые моменты, например, в нагруженных насосах, компрессорах, дробилках и т. Д.Их скольжение также обычно составляет менее 5%.
Двигателикласса D обладают наивысшими пусковыми моментами, низким пусковым током и большим скольжением при полной нагрузке (от 5% до 20% в зависимости от применения). Их крутящий момент отрыва происходит на гораздо более низкой скорости, чем у двигателей других классов, что можно увидеть, сравнив положение пиков каждой кривой на Рисунке 2. Высокое сопротивление ротора, которое делает двигатели класса D такими сильными, также отвечает за их более низкий пиковый крутящий момент. скорости, иногда вызывая пиковый крутящий момент при нулевой скорости (100% скольжение).Двигатели класса D обычно применяются в бульдозерах, литейных машинах, пробивных прессах и т. Д.
Заявки и критерии отбора
Асинхронные двигателис короткозамкнутым ротором являются популярным выбором в промышленности, отчасти из-за их низкой стоимости, простоты обслуживания, высокой эффективности, хорошего регулирования температуры и безопасности. Их самым большим недостатком является отсутствие контроля скорости, поэтому для решения этих задач были разработаны другие двигатели (двигатели с фазным ротором). Стандартные рамы NEMA позволяют легко выбрать правильный двигатель, требуя только рабочих характеристик проекта.
Так, например, если кузнечный бизнес создает новый силовой молот, который должен обеспечивать быстрые и сильные удары, им следует изучить двигатели класса D, поскольку они обеспечивают чрезвычайно высокий пусковой момент. Точно так же, если двигатель необходим для простого вентилятора HVAC, двигатели классов A и B будут работать отлично. Определите необходимые крутящие моменты, скорости и напряжения для работы, и на рынке обязательно найдется подходящая беличья клетка.
Сводка
В этой статье представлено понимание того, что такое асинхронные двигатели с короткозамкнутым ротором и как они работают.Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://hyperphysics.phy-astr.gsu.edu/hbase/mintage/indmot.html
- http://www.egr.unlv.edu/~eebag/Induction%20Motors.pdf
- https://www.controleng.com/articles/what-to-consider-when-choosing-an-ac-induction-motor/
- http: // ocw.uniovi.es
- http://people.ece.umn.edu/users/riaz/animations/sqmovies.html
Прочие изделия из двигателей
Больше от Machinery, Tools & Supplies
Асинхронные двигатели переменного токас роторами с короткозамкнутым ротором — Bodine
Почему его называют «ротор с короткозамкнутым ротором»? штанги ротора и концевые кольца. Обычный термин для этой конструкции ротора — «беличья клетка», потому что, если вы удалите стальные пластины после того, как ротор был отлит под давлением, вы получите скелет, очень похожий на колесо хомяка.Мы предполагаем, что в те времена, когда был изобретен этот термин, больше людей использовали в качестве домашних животных белок, чем хомяков. 🙂 Литой под давлением ротор с короткозамкнутым ротором является недорогим и относительно простым в производстве, если вы производите их в больших количествах.
В асинхронном двигателе переменного тока обмотка статора создает магнитное поле, которое взаимодействует с токонесущими проводниками ротора, создавая вращающий момент. Токи ротора индуцируются в проводниках ротора изменяющимся магнитным полем статора, а не с помощью коммутатора и щеток (как в двигателе с постоянным постоянным током).Это индукционное действие является основным принципом работы асинхронных двигателей переменного тока. Основные рабочие характеристики асинхронных двигателей переменного тока зависят от: 1) типов обмоток (расщепленная фаза, экранированные полюса, трехфазные и т. Д.) И 2) количества фаз, частоты и напряжения источника питания. источник.
Ротор типичного асинхронного двигателя состоит из ряда стальных пластин, каждая из которых имеет пазы или отверстия по периферии. Когда листы укладываются вместе и скрепляются заклепками, эти отверстия образуют каналы, которые заполняются проводящим материалом (обычно медью или алюминием) и закорачиваются друг с другом посредством проводящих концевых колец.Проводники обычно формируются методом литья под давлением. В асинхронных двигателях переменного тока с открытой рамой ротор, отлитый под давлением, обычно включает в себя встроенные лопасти вентилятора, которые обеспечивают эффективное и экономичное охлаждение двигателя. Обычный термин для этого типа ротора — «беличья клетка» (из-за сходства с взлетно-посадочной полосой старомодной беличьей клетки). Это недорогая и распространенная форма индукционного ротора переменного тока.
Когда вращающееся поле проходит мимо стержней в роторе, возникает индуцированный ток. Поскольку ток в проводнике создает магнитное поле соответствующей полярности, возникает притяжение между вращающимся магнитным полем статора и индуцированным полем в роторе.Вращение возникает в результате попытки ротора успевать за вращающимся магнитным полем (статора). Скорость изменения, с которой магнитные линии пересекают ротор, определяет индуцированное напряжение. Когда ротор неподвижен, это напряжение максимально. По мере увеличения скорости ротора ток и соответствующий крутящий момент уменьшаются. В точке синхронной скорости (скорости вращающегося поля) индуцированный ток и развиваемый крутящий момент равны нулю.
Ротор несинхронного асинхронного двигателя переменного тока всегда будет работать с некоторой скоростью, меньшей, чем синхронная, если ему не помогает какое-либо дополнительное приводное устройство.Это отставание ротора от вращающегося магнитного поля называется «скольжением» и выражается в процентах от синхронной скорости:
При разработке роторов для асинхронных двигателей форма и размеры пазов явно влияют на рабочие характеристики двигателя. Форму прорези (планки) можно увидеть на примерах ламинирования на фото. Другим конструктивным фактором, характерным для большинства индукционных роторов с короткозамкнутым ротором, является преднамеренный «перекос» пазов (размещение пазов под небольшим углом к валу) во избежание зазубрин и больших колебаний пускового момента, которые могут возникнуть, если стержни расположены параллельно друг другу. пазы статора.Также важно отметить, что однофазные двигатели переменного тока требуют вспомогательной схемы запуска. См. «Руководство по мотор-редукторам Bodine» для получения дополнительной информации о принципах конструкции и различных конструкциях двигателей.
(На фотографии ниже показаны два разных слоя ротора слева, готовый ротор асинхронного двигателя переменного тока с подшипниками, запрессованными на вал, и беличья клетка после растворения ламинированной стали азотной кислотой.) Авторские права Bodine Electric Company © 06/2016.Все права защищены. В случае асинхронного двигателя с короткозамкнутым ротором геометрия является регулярной и периодической. Это было использовано в стратегии генерации сетки. Сетка была сформирована с использованием функции отображения, которая подразделяла каждую область двигателя. Области определены на Рисунке 4.2.1. Рисунок 4.2.1. Топологические области асинхронного двигателя Самая внутренняя область — это сердечник ротора.Эта область представляет собой пространство между двумя цилиндрами, одним из которых является вал двигателя, а другим — дно пазов ротора. Внутренний круг разделен на количество равных частей, задаваемых пользователем. Каждый паз ротора и корень зуба также разделены на определенное пользователем количество сегментов. Затем указывается количество промежуточных слоев и веса. Результирующая сетка создается слой за слоем от внутреннего круга до внешнего круга. В этом методе используется весовая функция (Hwang, Salon and Palma, 1988), которая относится к рисунку 4.2.2. Рисунок 4.2.2. Разделение двигателя на слои (4.2.1) W = R + AB / NBR + GH / NA , где AB и GH относятся к длинам дуги, NB и NA — указанное количество сегментов вдоль этих дуг, а R как показано на рисунке 4.2.2. Общее количество слоев тогда составляет (4.2.2) N = NINT [log (AB / NBGH / NA) log W] , где NINT возвращает ближайшее целое число к аргументу. Длина d 1 находится как (4.2.3) d1 = (W − 1) * RWN − 1 Количество сегментов на этом слое (4.2.4) N1 = NA + NINT (NB − NA) * d1 / R) Чтобы найти следующий слой, мы повторно вычисляем W, заменяем N на N-1 и R на R −d 1 и так далее. Первым шагом в прогнозировании характеристик магнитной вибрации конкретной электрической машины является анализ динамического магнитного поля, действующего в машине. Затем данные магнитного поля можно использовать для вычисления сил и их распределений, которые затем, в свою очередь, применяются к механической модели машины и используются для прогнозирования вибраций. Рассмотрим случай, показанный на рисунке 4.2.2, с сегментами NA на внутреннем круге и сегментами NB на внешнем сегменте. Все внутренние узлы будут размещены на кругах, радиус которых полностью определяется количеством слоев и весами. Осталось только определить количество узлов (или сегментов) на каждом круге. Зуб и паз ротора симметричны на каждом половинном шаге паза. Геометрия указана на рисунке 4.2.3. Рисунок 4.2.3. Паз и зуб Количество слоев и вес задаются, как и в случае сердечника ротора, а сетка создается для полуслота с использованием уравнения (4.2.4). Затем сетка отражается вокруг центральной линии паза и повторяется N r раз, где N r — количество пазов ротора. Области сетки отличаются от областей материала. Свойства материала указываются независимо. Благодаря этой дополнительной гибкости область зацепления ротора содержит один слой элементов в воздушном зазоре, как показано выше. Причина этого выбора будет объяснена ниже при обсуждении движущейся сетки. Область воздушного зазора представляет собой кольцевую область, аналогичную сердечнику ротора, и зацеплена таким же образом.Обратите внимание, что область docs сетки воздушного зазора не точно соответствует воздушному зазору, поскольку один слой фактического воздушного зазора находится в зацеплении с ротором, а другой — со статором. Область зуба и паза статора (и один слой элементов в воздушном зазоре) обрабатывается так же, как и область зуба и паза ротора выше. Область сердечника статора рассматривается как область сердечника ротора. По мере вращения ротора элементы воздушного зазора необходимо постоянно заменять. В последующем анализе мы покажем, что для электромагнитных целей ротор моделируется в своей собственной системе отсчета.Сердечник ротора и области щелевых зубьев не переключаются, а только вращаются. Сердечник статора и области щелевых зубцов остаются неподвижными. Постоянно изменяется только область воздушного зазора (исключая часть воздушного зазора, прикрепленную к сетке ротора и сетке статора, как описано выше). Сетка создается таким образом, что область воздушного зазора находится между двумя кругами с одинаковым расстоянием между узлами. Повторное объединение выполняется (при необходимости) без добавления каких-либо новых узлов или элементов. Алгоритм только повторно соединяет существующие элементы, используя новые узловые позиции.Это показано на рисунке 4.2.4 для двух моментов времени. Рисунок 4.2.4. Замена слоев воздушного зазора Как вы, возможно, знаете, электродвигатели — это устройства, преобразующие электрическую энергию в механическую, и в настоящее время они доминируют в современной промышленности. Они просты в использовании, имеют простой дизайн и бывают разных форм, что позволяет им добиться успеха практически в любой ситуации. Электродвигатели могут получать питание от постоянного или переменного тока.В этой статье Linquip исследует конкретный двигатель переменного тока, известный как двигатель с короткозамкнутым ротором, который представляет собой особый тип асинхронного двигателя, который использует эффект электромагнитной индукции для преобразования электрического тока в энергию вращения. Прочтите, чтобы понять принципы работы двигателей с короткозамкнутым ротором, как они работают и для каких применений они используются. Эти двигатели представляют собой тип асинхронных двигателей, которые используют электромагнетизм для создания движения.Это так называемые двигатели с короткозамкнутым ротором, потому что форма их ротора напоминает клетку. Две круглые торцевые крышки соединены стержнями ротора, на которые действует электромагнитное поле, создаваемое статором или внешним корпусом, состоящим из многослойных металлических листов и намотки проволоки. Статор и ротор являются двумя основными частями любого асинхронного двигателя, а короткозамкнутый ротор — это просто один из способов использования эффекта электромагнитной индукции. Переменный ток, проходящий через статор, создает электромагнитное поле, которое колеблется с частотой переменного тока, которая вращается вокруг ротора, вызывая противоположные магнитные поля в стержнях ротора, что приводит к движению. с короткозамкнутым ротором работают так же, как и большинство других асинхронных двигателей, и единственная разница между ними заключается в особом взаимодействии между ротором и статором. Эти двигатели максимизируют электромагнитную индукцию за счет использования стержней ротора для взаимодействия с электромагнитным полем статора. Статор обычно содержит обмотки из проволоки, по которым проходит переменный ток; этот ток изменяется синхронно с синусоидальной переменной, которая затем изменяет направление тока в обмотках провода. Когда ток колеблется, генерируемое электромагнитное поле будет следовать его примеру и в определенных устройствах заставит его вращаться с частотой, подобной частоте переменного тока. Это вращающееся электромагнитное поле создает противоположное напряжение и электромагнитное поле в стержнях ротора, тем самым толкая ротор, создавая вращательное движение. Этот ротор не вращается с точной частотой переменного тока, поэтому двигатели с короткозамкнутым ротором, а также другие асинхронные двигатели считаются асинхронными.Всегда есть некоторая потеря между частотой переменного тока и частотой вращения вала, и это в первую очередь результат вращения ротора. Если бы ротор вращался с той же частотой, то величина силы, действующей на стержни ротора, была бы равна нулю, таким образом, не создавая движения. Детали, необходимые для изготовления двигателя с короткозамкнутым ротором, — это статор, ротор, вентилятор, подшипники. Статор состоит из трехфазной обмотки с металлическим корпусом и сердечником, разнесенной механически и электрически под углом 120 градусов.Чтобы обеспечить путь с низким сопротивлением для потока, генерируемого переменным током, обмотка установлена на многослойном железном сердечнике. Ротор преобразует электрическую энергию в механическую мощность. Вал, сердечник, короткозамкнутые медные шины являются частями ротора. Чтобы избежать гистерезиса и возникновения вихревых токов, приводящих к потере мощности, ротор имеет многослойное покрытие. И для предотвращения зазубрин проводники перекошены, что также помогает обеспечить хороший коэффициент трансформации. Вентилятор, прикрепленный к задней части ротора для теплообмена, помогает поддерживать заданную температуру двигателя.Для плавного вращения в двигателе предусмотрены подшипники. в США и МЭК в Европе классифицировали конструкцию асинхронных двигателей с короткозамкнутым ротором на основе их скоростно-крутящих характеристик на несколько классов. Эти классы: класс A, класс B, класс C, класс D, класс E и класс F. Применение двигателя с короткозамкнутым ротором с короткозамкнутым ротором обычно используются во многих промышленных приложениях.Они особенно подходят для приложений, в которых двигатель должен поддерживать постоянную скорость, самозапускаться или требовать минимального обслуживания. Эти двигатели обычно используются в: Некоторые преимущества асинхронных двигателей с короткозамкнутым ротором: Недостатки асинхронного двигателя с короткозамкнутым ротором следующие. Это все, что вам нужно знать о двигателях с короткозамкнутым ротором и их применении в системе.Если вам понравилась статья в Linquip, не стесняйтесь делиться своим опытом в разделе комментариев. Есть вопросы, с которыми мы можем вам помочь? Зарегистрируйтесь на нашем сайте и получите профессиональные консультации наших специалистов. Ротор — это вращающаяся часть любой электрической машины, например, генератор переменного тока, двигатель. В генераторе ротор служит источником вращающегося магнитного потока, а в двигателе — источником вращающей механической силы или крутящего момента. Поскольку он является частью электрической машины, необходимо учитывать его электрическое подключение.На самом деле не существует фиксированных правил электрического подключения к ротору. В случае генератора переменного тока ротор производит магнитный поток, поэтому он должен питаться постоянным током, этот ток подается на ротор либо через прямое соединение (щеточно-контактное кольцо), либо без щеточной индукции. Есть два типа конструкции ротора. 1. Ротор с короткозамкнутым ротором, 2. Ротор с фазовой обмоткой. с короткозамкнутым ротором может быть описана следующим образом: «Ламинирование или материал сердечника двигателя укладываются в цилиндрическую форму, металлические стержни помещаются в эти пазы ламинирования перпендикулярно. Металлические стержни с обеих сторон закорочены концевыми кольцами. Металлические стержни скошены или расположены под некоторым углом к валу ротора.” с короткозамкнутым ротором популярен благодаря прочной и надежной конструкции, но поскольку его катушки (металлический стержень) закорочены, нет никаких средств для добавления внешнего сопротивления. Добавление внешнего сопротивления улучшает запуск двигателя. Этот тип ротора имеет более простую конструкцию, он представляет собой тип двигателя, очень простого, прочного и экономичного. Изображение ниже описывает конструкцию ротора с короткозамкнутым ротором. Трехфазная, двухслойная, распределенная обмотка — характеристика ротора с фазной обмоткой. Число полюсов ротора должно быть равно полюсу статора. И всегда ротор будет трехфазным, даже если статор намотан на две фазы. Ротор с фазовой обмоткой состоит из настоящих обмоток статора, он имеет более сложную и хрупкую конструкцию (щетки скользят по ротору с возможным расположением сопротивлений для контроля фазы запуска), он требует периодического обслуживания и имеет большие габаритные размеры. Очевидно, что сложность запуска двигателей может быть решена, если перед запуском можно добавить внешнее сопротивление (таким образом, улучшив низкий крутящий момент при запуске) и удалить его, пока двигатель работает на полной скорости. Особенность ротора с фазовой обмоткой заключается в том, что внешнее сопротивление можно добавлять и снимать во время работы двигателя. Устройство добавляет внешнее сопротивление последовательно с цепью ротора с фазной обмоткой. Удаление осуществляется с помощью контактного кольца и щеток.Ниже два изображения прояснят факты. — обзор
4.2.1 Создание сетки
: простое, но полезное руководство
Что такое двигатель с короткозамкнутым ротором?
Как работает двигатель с беличьей клеткой?
Двигатели Классификация асинхронных двигателей с короткозамкнутым ротором
Национальная ассоциация производителей электрооборудования Дизайн класса А
Конструкция класса B
Дизайн класса C
Дизайн класса D
Дизайн класса E
Конструкция класса F
Преимущества двигателя с короткозамкнутым ротором
Недостатки двигателя с короткозамкнутым ротором
Основы короткозамкнутого ротора и фазного ротора.
Подключение электрического кабеля к ротору:
С другой стороны, в случае асинхронного двигателя переменный ток подается на ротор по принципу индуцированного тока. Но в синхронном двигателе подключение к ротору осуществляется щеткой и контактным кольцом. Конструкция ротора:
01. Конструкция ротора с короткозамкнутым ротором.
Конструкция ротора
Здесь показаны только три пластинки или материал сердечника ротора.
В ламинат вставлены металлические прутья. 02. Конструкция и функции ротора с фазовой обмоткой
Конструкция:
В роторе с фазной обмоткой три фазы соединены внутри звездой.Другая сторона фазовой катушки выведена наружу, и к ней подводится трехфазный ток с помощью контактного кольца и щетки. Как улучшить запуск фазного ротора путем добавления внешнего сопротивления.
Внешнее сопротивление может быть добавлено при запуске и удалено, когда двигатель наберет достаточную скорость. Конструкция контактного кольца в роторе с фазовой обмоткой — добавление внешнего сопротивления в цепь ротора для создания пускового момента, а затем отключение, когда двигатель набирает скорость. Дополнительная литература
Арматура ротора с короткозамкнутым ротором — Электрические аппараты
Компания Electrical Apparatus & Machine предоставляет услуги по ремонту и производству электрических роторов только самого высокого и самого высокого качества для ремонтных мастерских по всему миру.Успешный ремонт ротора зависит от опыта компании, производящей ремонт. Компания «Электроаппарат» гарантирует качество наших электрических роторов и успешно ремонтирует их с 1974 года.
Мы отремонтировали роторы с долевой мощностью до 10 000 лошадиных сил. На самом деле нет электрического ротора, который мы не могли бы отремонтировать! Чтобы узнать стоимость ремонта вашего ротора, свяжитесь с нами сегодня, чтобы узнать цену. Вы можете использовать форму на этой странице, чтобы отправить нам необходимую информацию, и мы свяжемся с вами в ближайшее время, чтобы предоставить дополнительную информацию, или просто позвоните нам.
Электрооборудование Обзор ремонта электродвигателя:
- Мы немедленно записываем размеры и биение ротора по их прибытии.
- Материал стержня затем удаляется из сердечника ротора и анализируется, чтобы мы могли воспроизвести исходную проводимость стержня.
- Прутки из медного сплава изготавливаются для каждой индивидуальной конфигурации паза для максимально возможной посадки с натягом.
- Торцевые кольца привариваются к ротору с помощью специальной технологии.
- Ротор обработан с высокой точностью.
- Ротор динамически сбалансирован до 0,1 мил.
- Мы внедряем строгие стандарты контроля качества на каждом этапе процесса изготовления арматуры, чтобы гарантировать совершенство на каждом этапе.
Все еще не уверены, подходят ли вам наши услуги по ремонту ротора? Мы отремонтировали десятки тысяч роторов, в том числе:
- Герметичные роторы
- Конструкция D Роторы
- Роторы для тяжелых условий эксплуатации
- Магниевые роторы
- Горные роторы
- Роторы с высоким проскальзыванием
- Синхронные полюса
- Двухклеточные роторы
- Высокоскоростные роторы
- Роторы с высоким крутящим моментом
- Роторы с предельным крутящим моментом для работы экстрактора
- Конические роторы
- И многое другое.
Мы предлагаем технологически передовые методы ремонта ротора, доступные сегодня в профессиональных ремонтных мастерских. От новых металлических пластин любого размера, вырезанных лазером, до новых прокладок для вентиляционных отверстий — мы можем выполнить ремонт вашего электрического ротора.
Свяжитесь с нами, чтобы запросить смету на любой тип ремонта ротора
Объяснение конструкции асинхронного двигателя с короткозамкнутым ротором
Введение
Мы рассмотрели классификацию двигателей переменного тока и подробно обсудили принцип работы, концепцию вращения ротора и многое другое. аспекты асинхронного двигателя.Теперь давайте подробно обсудим наиболее распространенную форму асинхронного двигателя, асинхронный двигатель с короткозамкнутым ротором. Причина названия «Беличья клетка» связана с типом ротора, который используется в этих двигателях. Почти 95% используемых асинхронных двигателей относятся к типу с короткозамкнутым ротором. А в предыдущей статье «Типы электрических двигателей» мы классифицировали асинхронные двигатели в зависимости от типа используемого ротора. Это
асинхронные двигатели с короткозамкнутым ротором и
асинхронные двигатели с контактным кольцом или фазным ротором
Конструкция индукционного двигателя с короткозамкнутым ротором
Любой асинхронный двигатель имеет статор и ротор.Конструкция статора для любого асинхронного двигателя практически одинакова. Но конструкция ротора отличается от типа, указанного выше.
Статор:
Статор — это самый внешний компонент двигателя, который можно увидеть. Он может быть сконструирован для однофазных, трехфазных или даже многофазных двигателей. Но в основном меняются только обмотки статора, а не базовая схема статора. Это почти то же самое для любого синхронного двигателя или генератора.Он состоит из нескольких штамповок, в которые вставлены обмотки. Давайте посмотрим на конструкцию трехфазного статора. Трехфазные обмотки размещены в пазах многослойного сердечника, и эти обмотки электрически разнесены на 120 градусов друг от друга. Эти обмотки подключаются по схеме звезды или треугольника в зависимости от требований. Выводы выводятся, как правило, по три, и подводятся к клеммной коробке, установленной на корпусе двигателя. Изоляция между обмотками обычно покрывается лаком или оксидом.
Ротор: беличья клетка Ротор:
Этот тип ротора состоит из многослойного цилиндрического сердечника с параллельными прорезями для проводов ротора, которые не являются проводами, как мы думаем, а толстыми и тяжелыми медными стержнями. или алюминий (алюминий) или его сплавы. Токопроводящие шины вставляются с одного конца ротора и по одной шине в каждый паз. На обоих концах ротора имеются торцевые кольца, которые приварены, электрически скреплены или даже закреплены болтами, что обеспечивает непрерывность электрической цепи.Эти концевые кольца закорочены, после чего они придают красивый вид, похожий на белку, отсюда и название.
Следует отметить один важный момент: концевые кольца и токопроводящие шины ротора постоянно закорочены, поэтому невозможно добавить какое-либо внешнее сопротивление последовательно с цепью ротора для запуска. Токопроводящие стержни ротора обычно не параллельны валу, а специально имеют небольшой перекос. В небольших двигателях ротор изготавливается по-другому.Весь сердечник ротора помещается в форму, а стержни и концевые кольца ротора отливаются в одно целое. Обычно используемый металл — это алюминиевый сплав. Некоторые очень маленькие роторы, работающие на вихревых токах, имеют ротор из твердой стали без каких-либо проводников.
Причины перекоса ротора
Это помогает уменьшить магнитный фон, таким образом, двигатель остается тихим,
Это также помогает избежать «зацепления» я.е. склонность ротора к блокировке. Склонность зубцов ротора оставаться под зубьями статора из-за прямого магнитного притяжения между ними,
Увеличение эффективного коэффициента трансформации между статором и ротором,
Повышенное сопротивление ротора из-за сравнительно более длинных токопроводящих шин &
5. Повышенное скольжение при заданном крутящем моменте.
Двигатель с короткозамкнутым ротором
Мы уже обсуждали, что ротор типа «беличья клетка» имеет два концевых кольца, которые постоянно закорочены с проводниками ротора.Таким образом, внешнее сопротивление не могло быть добавлено к цепи ротора. Поскольку ротор имеет очень низкое сопротивление, пусковой момент был очень низким. Пусковой крутящий момент может быть увеличен за счет использования обоймы с высоким сопротивлением, но двигатель будет иметь очень низкий КПД в нормальных условиях работы, так как будут большие потери Cu. Итак, мистер Бушор придумал двигатель, который имел две независимые обоймы на одном роторе. Наружная клетка состоит из стержней из металла с высоким сопротивлением, а внутренняя клетка — из медных стержней с низким сопротивлением.Таким образом, внешняя клетка имеет высокое сопротивление с низким отношением реактивного сопротивления к сопротивлению, а внутренняя клетка имеет низкое сопротивление, но высокое отношение реактивного сопротивления к сопротивлению. Таким образом, внешняя клетка развивает максимальный крутящий момент при запуске, а внутренняя клетка — при проскальзывании около 15%.
Стандартные типы двигателей с короткозамкнутым ротором
Трехфазные асинхронные двигатели с короткозамкнутым ротором подразделяются на 6 различных стандартных типов в зависимости от их электрических характеристик. Они различаются в таблице ниже:
Примечания:
Класс A : ротор с короткозамкнутым ротором имеет относительно низкое сопротивление и реактивное сопротивление.Общая конструкция пазов в роторе такова, что стержни ротора расположены близко к поверхности, чтобы уменьшить реактивное сопротивление.
Класс B: Эти двигатели могут запускаться при полной нагрузке, развивая нормальный пусковой момент. Ротор имеет глубокие и узкие пазы, чтобы обеспечить высокое реактивное сопротивление при запуске. Эти двигатели хорошо подходят для тех приложений, где есть ограничение по пусковому току. Эти двигатели также можно запускать при пониженном напряжении.
Класс C: Это двигатели с двойным короткозамкнутым ротором. Эти роторы с двойным короткозамкнутым ротором сочетают в себе высокие пусковые моменты с низкими пусковыми токами. Эти двигатели обладают высокими характеристиками пускового момента и подходят для пуска при пониженном напряжении.
Класс D: Эти двигатели обладают высокими пусковыми моментами, что достигается за счет конструкции пазов ротора. Эти пазы ротора имеют тонкие стержни ротора, которые уменьшают поток утечки ротора, а полезный поток — высоким.
Класс E : Эти двигатели имеют относительно очень низкое скольжение при номинальной нагрузке. Для двигателей мощностью более 5 кВт пусковой ток может быть достаточно высоким, чтобы потребовать компенсатор или пускатель сопротивления.
Класс F : Эти двигатели сочетают в себе низкий пусковой момент с низким пусковым током и могут запускаться при полном напряжении. Это достигается за счет конструкции пазов ротора, показанной на рисунке.
В следующей статье мы рассмотрим процедуру запуска и различные методы запуска асинхронного двигателя с короткозамкнутым ротором.Также будут подчеркнуты различные методы контроля скорости.
Кредиты на изображения и контент
Clayton Engineering
Электромоторы Audel от Miller & Richard
Машины A.