Характеристики шагового двигателя — MULTICUT
Обновлено: 06.09.2021
Шаговое устройство — бесщеточный двигатель с несколькими обмотками, функционирующий по синхронному принципу.
С точки зрения конструкции механизм предельно прост и состоит из трех основных элементов:
- выводы,
- вал,
- круглый корпус.
Принцип работы шагового двигателя заключается в поочередной активации обмоток, которые обеспечивают вращение / остановку ротора.
Стартер и ротор вращаются под воздействием магнитного потока, при этом зависимость силы вращения механизма прямо пропорциональна силе магнитного поля, мощность которой коррелирует с числом витков в обмотке и значением электрического тока в ней.
Таким образом, устройство может быть описано, как механизм, трансформирующий электроимпульсы во вращение.
Виды управления и разновидности
Управление шаговым двигателем может осуществляться по четырем схемам:
- с попеременной активацией фаз,
- с перекрытием фаз,
- в полушаговом режиме,
- в микрошаговом режиме.

Существует три вида шаговых устройств:
- Гибридный
- двигатель постоянного сопротивления;
- С переменным магнитом
- оснащен 3 либо 4 обмотками, характеризуется свободным вращением;
- С постоянным магнитом
- оснащен 2 обмотками, испытывает сопротивление вращению.
В числе данных разновидностей наиболее мощной является гибридная модель, представляющая собой усовершенствованный вариант устройства постоянного сопротивления.
Сфера применения
Наиболее широкое применение шаговые двигатели нашли в автомобильной промышленности, в производстве оборудования различного назначения и всевозможной бытовой техники. Основная цель — максимально автоматизировать производственный процесс.
Шаговыми двигателями оснащаются станки с числовым программным управлением (например, 3D фрезерные станки с ЧПУ, фрезерные станки с ЧПУ по алюминию и другие).
Возможность точного позиционирования делает эти механизмы незаменимыми в работе устройств хранения информации.
Высокая надежность и отличные технические характеристики данной разновидности двигателей обуславливают их широкую востребованность в военной промышленности.
Преимущества и недостатки
Список очевидных эксплуатационных преимуществ этих устройств составляют:
- высокая точность работы,
- минимальная погрешность даже при работе на низких скоростях,
- впечатляющая износостойкость (в том числе и за счет отсутствия щеток).
В качестве основного недостатка стоит упомянуть проблему так называемого пропущенного шага, в результате которого происходят сбой при выполнении фрезерования. Данная неприятность зачастую является следствием применения завышенных скоростных режимов обработки материала или установкой на станок двигателей недостаточной мощности.
Чтобы избежать таких неполадок в работе шагового двигателя, необходимо осуществлять настройку максимально корректно, устанавливать драйверы в четком соответствии с техническими требованиями и рекомендациями производителя. Правильно рассчитанная мощность шагового двигателя и корректные скоростные режимы эксплуатации полностью исключают проблему пропущенного шага.
Компания MULTICUT предлагает на выгодных условиях приобрести фрезерно-гравировальные станки с ЧПУ на шаговых двигателях по ценам производиталя. Для оформления заказа или при необходимости в развернутой технической консультации по тому или иному продукту позвоните нам или оставьте заявку на сайте.
Читайте также
Обновлено: 18.10.2021
Рабочий режущий инструмент станков с ЧПУ — это фреза. Конструктивно она является вращающейся деталью с заточенными зубьями. Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Фрезы для станков с ЧПУ по дереву производят из разных сплавов и делят на категории. Их выбор зависит от характеристик обрабатываемой поверхности, типа работы и степени твердости древесины. Правильно выбрать подходящий инструмент для программных станков поможет наша статья, которая познакомит вас с типами фрез и их назначением…
Обновлено: 06.11.2021
Современные сверлильные станки с ЧПУ используются на производствах, на которых в больших объемах осуществляется обработка деталей всевозможного назначения, например, на мебельных фабриках. Сегодня производители предлагают покупателям модели сверлильных станков с ЧПУ во всем функциональном многообразии…
Обновлено: 15.10.2021
Станок с ЧПУ (числовым программным управлением) — сложное устройство, позволяющее создавать детали различных форм из дерева, металла или пластмассы. Для работы станков с ЧПУ требуются управляющие программы для создания макетов будущих изделий, введения команд управления и чтения инструкций, написанных на специальном языке программирования. Такое программное обеспечение должно быть функциональным и простым в использовании. Правильно выбрать подходящие программные продукты для станка с ЧПУ поможет наша статья…
Для работы станков с ЧПУ требуются управляющие программы для создания макетов будущих изделий, введения команд управления и чтения инструкций, написанных на специальном языке программирования. Такое программное обеспечение должно быть функциональным и простым в использовании. Правильно выбрать подходящие программные продукты для станка с ЧПУ поможет наша статья…
Обновлено: 14.10.2021
Существует широкий ассортимент фрезерных ЧПУ-станков, которые предназначены для выполнения разного рода работ. Выбор фрезерного станка с ЧПУ профессионалы осуществляют, руководствуясь богатым опытом и профильными навыками…
Обновлено: 17.10.2021
Некоторые элементы мебели или столярные изделия соединяются между собой «на шип». Шипом называют выступ на конце одной из двух заготовок, который входит в паз, предусмотренный в другой.
Характеристики получения по запросу — в шагового двигателя
В этом примере показано, как параметрировать и настроить шаговый двигатель с помощью информации о таблице данных производителя и тестовой обвязки. Модель параметрируется с помощью числовых данных, извлеченных из таблицы данных. Симуляция генерирует характеристики крутящего момента получения по запросу — в, которые можно сравнить с обеспеченной производителями кривой получения по запросу — в. Чтобы настроить модель шагового двигателя, пример использует тестовую обвязку, которая варьируется параметры загрузки и тип дисков.
Тестовая обвязка
Степпер моделируется с помощью блока Stepper Motor из библиотеки Simscape™ Electrical™. Драйвер шагового двигателя моделируется текущим источником и фильтром первого порядка. Двигатель помещается в тестовую обвязку. Тестовая обвязка постепенно увеличивает загрузку, пока промах не происходит для каждого протестированного спроса на уровень шага. Ускользните обнаружение реализовано в подсистеме Обнаружения Промаха. Подсистема содержит блок утверждения Simulink®, который определяет различие между ожидаемым и фактическим углом ротора.
Ускользните обнаружение реализовано в подсистеме Обнаружения Промаха. Подсистема содержит блок утверждения Simulink®, который определяет различие между ожидаемым и фактическим углом ротора.
Характеристики крутящего момента получения по запросу — в
График показывает характеристики получения по запросу — в, сгенерированные симуляцией тестовой обвязки. Результаты накладываются на кривую получения по запросу — в от таблицы данных производителя. Достижение точного совпадения для характеристик получения по запросу — в может быть сложным, потому что большинство таблиц данных не задает условия испытания. Кроме того, некоторые таблицы данных не вводят все численные значения, требуемые смоделировать шаговый двигатель. В этом случае кривая получения по запросу — в от симуляции используется, чтобы определить для представительных значений, которые дают к приемлемому соответствию кривой получения по запросу — в.
Чувствительность характеристик получения по запросу — в к параметрам диска и загрузки
В режиме получения по запросу — в шаговый двигатель должен запуститься и остановиться, не теряя синхронизацию. Из-за динамического характера шаговых двигателей, быстродействие крутящего момента получения по запросу — в очень чувствительно к конфигурации дисков шагового двигателя и параметрам загрузки.
Из-за динамического характера шаговых двигателей, быстродействие крутящего момента получения по запросу — в очень чувствительно к конфигурации дисков шагового двигателя и параметрам загрузки.
При моделировании или настройке шагового двигателя, полагайте что:
Увеличение инерции загрузки уменьшает крутящий момент получения по запросу — в шагового двигателя на более высоких уровнях шага. Обычно для высокой операции неродного уровня, инерция загрузки меньше в три раза больше чем это инерции ротора. Это — общепринятая практика, чтобы ограничить инерцию загрузки меньше чем в десять раз больше чем это инерции ротора.
Загрузки с более высокой демпфирующей составляющей приводят к лучшей эффективности на более низких уровнях шага, потому что затухание помогает преодолеть эффекты резонанса шагового двигателя. Точно так же внутреннее моторное затухание ротора может также помочь улучшать производительность на низких уровнях шага.
Шаговые двигатели с низким сопротивлением обмотки часто управляются с помощью постоянного текущего диска.
 Уменьшать текущее время нарастания, выше, чем номинальное напряжение применяется к двигателю. Более высокое напряжение питания дает к более высокой возможности крутящего момента получения по запросу — в на более высоких уровнях шага.
Уменьшать текущее время нарастания, выше, чем номинальное напряжение применяется к двигателю. Более высокое напряжение питания дает к более высокой возможности крутящего момента получения по запросу — в на более высоких уровнях шага.Кривая крутящего момента получения по запросу — в, обеспеченная в таблице данных производителя, обычно дается для конкретного драйвера и настройки загрузки (тип загрузки, инерция загрузки и затухание загрузки). Производители склонны тестировать шаговые двигатели или с настройкой dyno или путем применения трения к колесу ротора. Метод тестирования редко включается в таблицу данных. Поэтому всегда важно симулировать шаговый двигатель, чтобы сгенерировать кривую в целях валидации параметризации.
График показывает, как крутящий момент получения по запросу — в чувствителен к затуханию ротора, напряжению диска, инерции загрузки и типу загрузки.
Для любого данного шагового двигателя набор значений параметра модели, который совпадает с характеристиками крутящего момента получения по запросу — в, не обычно уникален. Гарантировать параметризацию является представительным, это — хорошая практика, чтобы также сгенерировать и сравнить кривую отступления с таблицей данных.
Как работают шаговые двигатели
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение.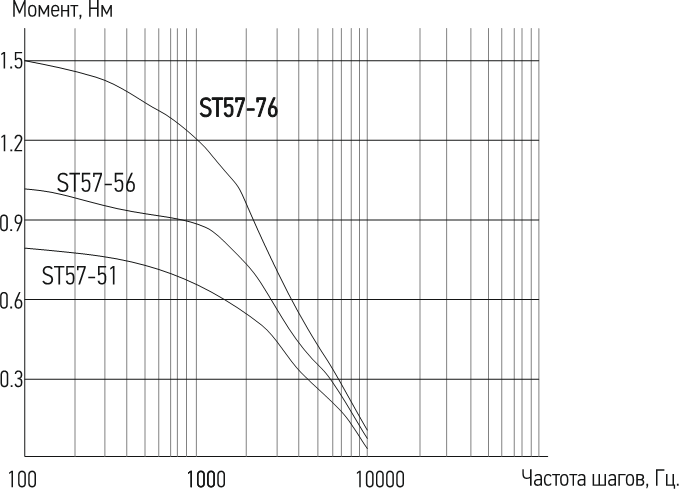 Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0. 9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Номер фазы и его характеристики шагового двигателя — Отраслевые знания — Новости
Число фаз и его характеристики шагового двигателя
Двухфазный и трехфазный шаговый двигатель взят в качестве примера, чтобы проиллюстрировать взаимосвязь между числом фаз и характеристиками шагового двигателя. Комплексный обзор количества фаз и характеристик:
Высокое разрешение
Согласно уравнению θs = 180 ° / PNr, угол шага равен 180 / PNr, поэтому, чем больше число фаз P, тем выше угловое разрешение. Увеличение разрешения может улучшить точность управления позиционированием, улучшить низкоскоростное отклонение от ступени, сделать возможным многофазное управление и улучшить демпфирование (улучшить характеристики торможения, уменьшить перерегулирование и время торможения при останове). Подробности в разделе «Технология привода».
Низкая вибрация
Как показано на рисунке ниже, показаны колебания крутящего момента двухфазного и трехфазного шаговых двигателей. Чем больше число фаз, тем больше мала относительная погрешность между значением крутящего момента Tg пересечения и максимальным статическим крутящим моментом Th кривой динамического крутящего момента коммутирующей двухфазной обмотки. Tg — нижний предел крутящего момента двигателя, а (Th-Tg) / Th — относительная погрешность пульсации крутящего момента. Чем больше число фаз, тем меньше значение, что является более выгодным для снижения вибрации. То есть, чем больше число фаз, тем меньше амплитуда пульсации крутящего момента, создаваемого двигателем, и чем выше частота, тем меньше генерируемая вибрация.
Высокоскоростной
Преимуществом многофазного шагового двигателя является его высокая скорость отклика. Шаговый двигатель является синхронным двигателем, а частота тока обмотки пропорциональна скорости вращения ротора. Если двигатель работает на высокой скорости, угловая частота тока обмотки увеличивается, так что реактивное сопротивление ωL, генерируемое индуктивностью L обмотки, увеличивается, тем самым уменьшая ток и вызывая падение крутящего момента.
Когда шаговый двигатель приводится в движение тысячами импульсов в секунду, импеданс Z обмотки двигателя значительно увеличивает реактивное сопротивление ωL по сравнению с сопротивлением постоянного тока. Когда двигатель работает на высокой скорости, если напряжение V постоянно, то ток фазы двигателя равен V / ωL. Механическая угловая скорость ωm равна ω = Nrωm, а ток обратно пропорционален Nr для двигателя с такой же механической угловой скоростью.
Согласно формуле θs = 180 ° / PNr, когда две фазы Nr = 50, угол шага составляет 1,8 °; когда пятифазный Nr = 20, угол шага составляет 1,8 °. Когда два шаговых двигателя вращаются с одинаковой скоростью на высокой скорости, ток пятифазной обмотки в 2,5 раза больше, чем у двух фаз. Поскольку ток мал, крутящий момент мал, поэтому крутящий момент пяти фаз больше, чем крутящий момент двух фаз.
Как работают шаговые двигатели | РОБОТОША
Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Однообмоточный режим
Двухобмоточный режим
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.
Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
Еще по этой теме
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
2-4-3. Характеристики шаговых двигателей
На рис. 2.57 показана взаимосвязь между крутящим моментом и скоростью шагового двигателя, если взять крутящий момент по вертикальной оси и частоту импульсов по горизонтальной оси. На рисунке нарисованы две кривые. Они называются соответственно начальной характеристической кривой и непрерывной характеристической кривой.
Стартовые характеристики
Пусковые характеристики . указывают уровень момента нагрузки, до которого двигатель в состоянии покоя может выдержать при запуске своей работы, когда на двигатель подаются импульсы постоянной частоты.Его также называют с крутящим моментом с характеристиками . Максимальный крутящий момент шаговых двигателей обычно определяется как пусковой крутящий момент при частоте импульсов 10 Гц. Когда мы говорим о шаговых двигателях, термин частота импульсов обычно используется вместо частоты импульсов. А для единицы измерения pps (импульсы в секунду) вроде бы используются чаще, чем Гц.
Характеристики непрерывного действия
Непрерывные характеристики показывают уровень момента нагрузки, до которого двигатель может выдержать, продолжая свою работу, когда он работает с импульсами постоянной частоты.Эти характеристики также называются характеристиками крутящего момента на повороте или характеристиками крутящего момента на отрыв .
Значение непрерывной характеристики становится выше, чем значение пусковой характеристики.
Значения как пусковой, так и непрерывной характеристик падают с увеличением частоты импульсов.
Рис. 2.57 Нагрузочные характеристики шаговых двигателей Частота, до которой двигатель может поддерживать непрерывную работу, называется максимальной непрерывной частотой отклика , а частота, до которой он может начать свою работу, называется максимальным импульсом втягивания
Крутящий момент шаговых двигателей уменьшается в области высоких скоростей, потому что электрический ток не течет легко на высоких частотах из-за индуктивности обмотки.
Пусковые и продолжительные характеристики шаговых двигателей различаются в зависимости от метода возбуждения и схемы привода. Следовательно, при оценке характеристик шаговых двигателей вы должны учитывать различные факторы, в том числе взаимосвязь со схемой привода.
<Короткая колонка> Удерживающий момент
Если внешняя сила приложена к шаговому двигателю, когда он остановлен, но находится под напряжением, сила притяжения, создаваемая между ротором и статором, работает, чтобы поддерживать положение остановки двигателя.
Этот момент сопротивления внешней силе называется удерживающим моментом.
<Короткая колонка> Момент фиксации
Из-за силы притяжения магнита ротора шаговые двигатели PM и HB имеют определенный уровень удерживающего момента, даже когда они не находятся под напряжением. Этот момент называется моментом фиксации.
Характеристики шагового двигателя
В прошлой статье мы рассмотрели разные типы шаговых двигателей с их конструкцией и принципами работы.Теперь давайте посмотрим на характеристики шагового двигателя. Характеристики шаговых двигателей в стационарных и рабочих условиях, которые позволяют выбирать для различных приложений:
- Статические характеристики и
- Динамические характеристики.
Статические характеристики:
Статические характеристики шагового двигателя получены в неподвижном положении. Статические характеристики шагового двигателя представляют собой кривые крутящий момент-смещение и крутящий момент-ток.
Кривая крутящего момента-смещения:
Это кривая, нарисованная между крутящим моментом, развиваемым в двигателе для смещения его из положения равновесия, как показано ниже. Видно, что крутящий момент в стационарном положении увеличивается почти линейно до угла смещения θ
м , а затем уменьшается при дальнейшем увеличении θ.Удерживающий момент:
Это максимальный крутящий момент нагрузки, приложенный к валу при возбуждении, который двигатель может выдержать без изменения своего шага или удержания нагрузки в неподвижном положении.Удерживающий момент зависит от номинального тока шагового двигателя. Если создаваемый крутящий момент превышает удерживающий момент, двигатель скользит в положение следующего шага, и он не создается, когда возбуждение двигателя выключается.
Кривая крутящего момента-тока:
Это кривая зависимости крутящего момента от тока. Как мы знаем, крутящий момент прямо пропорционален току. Электромагнитный момент, создаваемый в шаговом двигателе, также увеличивается с увеличением тока, как показано ниже.
Момент фиксации:
Это крутящий момент, создаваемый на валу для выдерживания в статическом положении без какого-либо возбуждения двигателя. Другими словами, это крутящий момент, когда в обмотках двигателя нет тока. Здесь крутящий момент без возбуждения или без тока означает, что в двигателе должен присутствовать постоянный магнит, который создает фиксирующий крутящий момент из-за своего магнетизма.
Из-за отсутствия постоянного магнита или немагниченного ротора в шаговом двигателе с переменным магнитным сопротивлением.Фиксирующий момент создается только в двигателях с постоянным магнитом и гибридных шаговых двигателях. Это представлено на приведенной выше кривой крутящего момента-тока, для которой шаговый двигатель с постоянным магнитом преодолевает фиксирующий крутящий момент для перемещения вала. Фиксирующий момент помогает быстро остановить двигатель, который возвращает вал в статическое положение при снятии возбуждения.
Динамические характеристики:
Динамические характеристики — это те характеристики, которые получены в рабочем режиме двигателя (по времени).Для управления шаговым двигателем в различных приложениях важно знать скорость шага для входного импульса. Динамические характеристики дают частоту шагов двигателя по отношению к входному импульсу. Ниже показаны динамические характеристики или характеристики скорости шага шагового двигателя.
Говорят, что шаговый двигатель находится в синхронном состоянии, когда он достигает количества положений шага, равного количеству приложенных входных импульсов. Предположим, что если частота шагов увеличивается сверх предела, двигатель не может достичь точного количества шагов в соответствии с входными импульсами.
Из вышеприведенной диаграммы T L — это максимальный крутящий момент нагрузки, тогда A будет максимальной частотой шага для входной частоты импульсов, при которой двигатель может запускаться или останавливаться без потери синхронизма. Область ниже кривой крутящего момента-1 известна как область пуска или останова. Точка B указывает максимальную тактовую частоту входного импульса, при которой двигатель может работать без потери синхронизма, что показано как кривая крутящего момента-2. Область между кривыми крутящего момента 1 и 2 называется областью поворота. Шаговый двигатель должен всегда работать в области нарастания, чтобы получить синхронизированную частоту шага с частотой входных импульсов.Кроме того, он должен гарантировать, что частота шагов должна быть в области пуска или останова при запуске или остановке двигателя без потери шагов.
Аналогично, для момента нагрузки T L ‘, S 1 и S 2 — это максимальная частота шагов для пуска или останова и запуска двигателя, соответственно, без потери шагов. Диапазон нарастания играет важную роль в приложениях, где наблюдается частое изменение скорости шага. Следовательно, он должен быть ускорен с низкой частотой следования импульсов, чтобы значение не превышало максимального предела.
Характеристики крутящего момента в зависимости от скорости шагового двигателя
График «Скорость-крутящий момент» показывает характеристическое соотношение между скоростью и крутящим моментом при включении шагового двигателя. Характеристики крутящего момента в зависимости от скорости являются ключом к выбору правильного двигателя и метода привода для конкретного применения. Эти характеристики зависят от двигателя, режима возбуждения и типа привода или метода привода (изменяются вместе с ним). На графике по горизонтальной оси отложена скорость на выходном валу двигателя, а по вертикальной оси — крутящий момент.
1.Максимальный удерживающий момент
Удерживающий момент — это максимальная удерживающая мощность (крутящий момент), которую имеет шаговый двигатель, когда мощность (номинальный ток) подается, но двигатель не вращается (с учетом допустимой силы снаряжение, если применимо).
2. Кривая втягивания
Кривая втягивания определяет область, называемую зоной начала и конца. Это максимальная частота, при которой двигатель может запускаться / останавливаться мгновенно с приложенной нагрузкой без потери синхронизма.
3. Кривая крутящего момента отрыва
Крутящий момент отрыва — это максимальный крутящий момент, который может быть выдан при заданной скорости. При выборе двигателя убедитесь, что требуемый крутящий момент находится в пределах этой кривой.
4.Максимальная частота запуска
Это максимальная импульсная скорость, при которой гибридный шаговый двигатель может запускаться или останавливаться мгновенно (без времени ускорения или замедления), когда фрикционная нагрузка и инерционная нагрузка шагового двигателя равны 0. Движение двигатель с более высокой скоростью импульса требует постепенного ускорения или замедления.Эта частота падает при наличии инерционной нагрузки на двигатель.
5. Максимальная скорость нарастания
Максимальная рабочая частота двигателя без нагрузки.
Предыдущая статья: 3 типа линейных шаговых двигателей, которые вы должны знать
Характеристики втягивания шагового двигателя
— MATLAB и Simulink
В этом примере показано, как параметризовать и настроить шаговый двигатель с использованием информации из таблицы данных производителя и тестовой оснастки.Модель параметризуется с использованием числовых данных, извлеченных из таблицы. Моделирование генерирует характеристики крутящего момента при втягивании, которые можно сравнить с кривой втягивания, предоставленной производителем. Для настройки модели шагового двигателя в примере используется тестовый жгут, который меняет тип привода и параметры нагрузки.
Test Harness
Шаговый двигатель моделируется с использованием блока Stepper Motor из библиотеки Simscape ™ Electrical ™. Драйвер шагового двигателя моделируется источником тока и фильтром первого порядка.Мотор помещается в испытательный жгут. Испытательная привязь постепенно увеличивает нагрузку до тех пор, пока не произойдет проскальзывание при каждой проверяемой скорости шага. Обнаружение скольжения реализовано в подсистеме обнаружения скольжения. Подсистема содержит блок утверждений Simulink®, который определяет разницу между ожидаемым и фактическим углом ротора.
Характеристики момента втягивания
На графике показаны характеристики втягивания, полученные при моделировании испытательного жгута. Результаты накладываются на кривую втягивания из таблицы данных производителя.Достижение точного соответствия характеристик втягивания может оказаться сложной задачей, поскольку в большинстве таблиц не указаны условия испытаний. Кроме того, в некоторых таблицах данных не приводятся все числовые значения, необходимые для моделирования шагового двигателя. В этом случае кривая втягивания из моделирования используется для определения репрезентативных значений, которые дают приемлемое соответствие кривой втягивания.
Характеристики втягивания Чувствительность к параметрам привода и нагрузки
В режиме втягивания шаговый двигатель должен запускаться и останавливаться без потери синхронизации.Из-за динамической природы шаговых двигателей характеристики момента втягивания и скорости втягивания очень чувствительны к конфигурации привода шагового двигателя и параметрам нагрузки.
При моделировании или настройке шагового двигателя учтите, что:
Увеличение инерции нагрузки уменьшает втягивающий момент шагового двигателя при более высоких скоростях шага. Как правило, для работы с высокой ступенчатой скоростью инерция нагрузки менее чем в три раза больше, чем инерция ротора. Общепринятой практикой является ограничение инерции нагрузки менее чем в десять раз по сравнению с инерцией ротора.
Нагрузки с более высокой составляющей демпфирования приводят к лучшей производительности при более низкой частоте шагов, поскольку демпфирование помогает преодолеть эффекты резонанса шагового двигателя. Точно так же внутреннее демпфирование ротора двигателя также может помочь улучшить производительность при низкой скорости шага.
Шаговые двигатели с низким сопротивлением обмотки часто приводятся в действие с помощью привода постоянного тока. Чтобы уменьшить время нарастания тока, на двигатель подается напряжение выше номинального. Более высокое напряжение питания обеспечивает более высокий крутящий момент при втягивании при более высоких скоростях шага.
Кривая момента втягивания, указанная в техническом описании производителя, обычно дается для конкретного привода и конфигурации нагрузки (тип нагрузки, инерция нагрузки и демпфирование нагрузки). Производители стремятся тестировать шаговые двигатели либо с помощью динамометрической установки, либо путем приложения трения к колесу ротора. Метод испытаний редко включается в технические данные. Следовательно, всегда важно моделировать шаговый двигатель для создания кривой для целей валидации параметризации.
На графике показано, как момент втягивания зависит от демпфирования ротора, напряжения привода, инерции нагрузки и типа нагрузки.
Для любого данного шагового двигателя набор значений параметров модели, который соответствует характеристикам момента втягивания, обычно не является уникальным. Чтобы обеспечить репрезентативность параметризации, рекомендуется также сгенерировать и сравнить кривую вытягивания с таблицей данных.
Сравнение шаговых двигателейи серводвигателей
В обрабатывающей промышленности двигатели выполняют мощную задачу преобразования электрической энергии в механическую. Шаговые двигатели и серводвигатели имеют явные преимущества и служат общими решениями для проектов управления движением.Выбор правильного двигателя зависит от технических характеристик и области применения.
Шаговый двигатель против серводвигателяНайдите решение
Крутящий момент и скорость
Оба двигателя имеют разные характеристики скорости и крутящего момента, это может быть решающим фактором, определяющим, какой двигатель подходит для конкретного применения. На высоких скоростях шаговые двигатели обычно имеют плохие характеристики крутящего момента. Серводвигатели могут развивать скорость от двух до четырех раз выше скорости шагового двигателя.
Серводвигателиработают с постоянной обратной связью по положению (замкнутый контур), в отличие от типичной разомкнутой системы шагового двигателя. Это позволяет серводвигателям работать на более высоких скоростях и генерировать более высокий пиковый крутящий момент. Использование редкоземельных магнитов в сервоприводах является дополнительной функцией, которая позволяет им создавать больший крутящий момент в небольшом корпусе.
Шаговый двигатель и серводвигатель — график зависимости крутящего момента от скоростиСистемный контроль
Обычно шаговые двигатели работают в режиме постоянного тока без обратной связи.Системы шаговых двигателей, работающие в режиме постоянного тока (разомкнутый контур), создают значительное количество тепла как в двигателе, так и в приводе, что вызывает беспокойство у некоторых. Сервоуправление решает эту проблему, подавая на двигатель только ток, необходимый для перемещения или удержания нагрузки.
Серводвигатели работают по замкнутой системе. Системы управления с обратной связью имеют энкодеры (датчики) для обеспечения обратной связи. Обратная связь — это данные, которые передаются обратно из одной точки в систему управления в другую предшествующую точку в системе управления.Сервоприводы управляются посылкой электрического импульса переменной ширины, известного как широтно-импульсная модуляция. Когда система получает импульс некоторой длины, она соответствующим образом вращает двигатель.
Число полюсов
Шаговые двигатели обычно используют от 50 до 100 полюсов, тогда как серводвигатели используют только от 4 до 12 полюсов. Полюс относится к области двигателя, где северный или южный полюс генерируется постоянным магнитом или пропусканием тока через катушки обмотки. Каждый полюс представляет собой естественную ступеньку для вала двигателя.
Большое количество полюсов шаговых двигателей позволяет им создавать удерживающий момент и потреблять меньше энергии при нулевой скорости. Шаговым двигателям не нужны энкодеры, поскольку они могут точно перемещаться между своими многочисленными полюсами, тогда как сервоприводы с меньшим количеством полюсов требуют, чтобы энкодер отслеживал их положение.
Анализ затрат
В серводвигателяхиспользуются магниты из редкоземельных металлов, а также есть внешние особенности, такие как энкодер, что обуславливает их более высокую стоимость. Физический размер серводвигателя больше, чем у шагового двигателя, поэтому для производства требуется больше сырья.
Шаговые двигатели значительно менее сложны. Системы шагового управления всегда дешевле и оптимальны для приложений, требующих от низкого до среднего ускорения, высокого удерживающего момента и гибкости работы в разомкнутом или замкнутом контуре.
Серводвигателиболее дорогие из-за сложности их внутренней конструкции. В шаговых двигателях используются менее дорогие магниты и редко используются редукторы.
Магазин Моторс
Какой двигатель лучше всего подходит для вашего применения?
Шаговые двигатели— хороший кандидат для приложений, требующих простого движения и отсутствия обратной связи.Доступны степперы самых разных размеров, что позволяет учесть ограничения по размеру.
Серводвигателипомогают в тех случаях, когда уровень шума и вибрации минимален. Серводвигатели лучше подходят для сложных систем, требующих точной обратной связи. Определенные приложения, такие как станки с ЧПУ, требуют высокой точности, где серводвигатель является оптимальным решением. Серводвигатели более эффективны, чем шаговые, их КПД составляет 80-90%.
В целом серводвигатели лучше всего подходят для высокоскоростных приложений с высоким крутящим моментом, в то время как шаговые двигатели лучше подходят для приложений с низким ускорением и высоким удерживающим моментом.Продукты ISL могут помочь подобрать подходящий двигатель для всех приложений, малых или больших.
Приведенная ниже таблица поможет вам определить, какой двигатель выбрать в зависимости от требований вашего приложения.
Атрибуты приложений для шаговых двигателей и серводвигателейШаговый двигатель — обзор
Шаговый двигатель — это устройство, которое преобразует постоянный ток. последовательность импульсов напряжения превращается в пропорциональное механическое вращение ее вала. Таким образом, шаговый двигатель работает и как привод, и как датчик положения.Дискретное движение шагового двигателя делает его идеально подходящим для использования с цифровой системой управления, такой как микрокомпьютер.
Скорость шагового двигателя можно изменять, изменяя частоту входной последовательности импульсов. Таким образом, если шаговый двигатель требует 48 импульсов для одного полного оборота, то входной сигнал 96 импульсов в секунду заставит двигатель вращаться со скоростью 120 об / мин. Вращение на самом деле осуществляется за конечные промежутки времени, но это визуально неразличимо на всех скоростях, кроме самых низких.
Принцип действия шагового двигателя можно проиллюстрировать на примере четырехфазной машины с переменным сопротивлением. Этот двигатель обычно имеет восемь зубцов статора и шесть зубцов ротора (см. Рисунок 2.57).
Рисунок 2.57. Шаговый двигатель с регулируемым сопротивлением
Если фаза 1 статора активирована отдельно, то два диаметрально противоположных зубца ротора совмещаются с зубцами фазы 1 статора. Следующий соседний набор зубьев ротора по часовой стрелке тогда на 15 ° не совпадает с зубьями статора.Активация обмотки фазы 2 сама по себе заставит ротор повернуться еще на 15 ° против часовой стрелки, чтобы выровнять соседнюю пару диаметрально противоположных зубцов ротора. Если обмотки статора возбуждаются в последовательности 1, 2, 3, 4, ротор будет двигаться последовательно с шагом 15 ° против часовой стрелки. Изменение последовательности возбуждения на обратное вызовет вращение ротора по часовой стрелке.
2.2.27.1 Терминология шагового двигателя
Вытягивающий момент : Максимальный крутящий момент, который может быть приложен к двигателю, работающему с заданной частотой шагов, без потери синхронизма.
Вращающий момент : Максимальный крутящий момент, с которым двигатель запускается с заданной частотой следования импульсов и достигает синхронизма без потери шага.
Динамический крутящий момент : крутящий момент, развиваемый двигателем при очень медленных шаговых скоростях.
Удерживающий момент : максимальный крутящий момент, который может быть приложен к неподвижному двигателю под напряжением, не вызывая вращения шпинделя.
Скорость отрыва : максимальная скорость переключения, при которой двигатель будет оставаться в синхронизированном состоянии, в то время как скорость переключения постепенно увеличивается.
Скорость втягивания : максимальная скорость переключения, при которой нагруженный двигатель может запускаться без потери шагов.
Диапазон поворота : Диапазон скоростей переключения между включением и выключением, при котором двигатель работает синхронно, но не может запускаться или реверсировать.
Общие характеристики типичного шагового двигателя приведены на Рисунке 2.58. Во время подачи каждого последовательного импульса ротор шагового двигателя быстро ускоряется к новому положению шага.Однако при достижении нового положения будет некоторое перерегулирование и колебания, если не будет обеспечен достаточный тормозящий момент, чтобы предотвратить это. Эти колебания могут вызывать резонанс ротора на определенных частотах импульсов, что приводит к потере крутящего момента или, возможно, даже к условиям вытягивания. Поскольку электродвигатели с регулируемым магнитным сопротивлением обладают очень небольшим внутренним демпфированием, они более восприимчивы к резонансам, чем двигатели с постоянным магнитом или гибридные типы. Доступны механические и электронные демпферы, которые можно использовать для минимизации неблагоприятных эффектов резонанса ротора.Однако, если это вообще возможно, двигатель следует выбирать так, чтобы его резонансные частоты не были критичными для рассматриваемого приложения.
Рисунок 2.58. Характеристики шагового двигателя
Благодаря своим уникальным характеристикам, шаговые двигатели широко используются в приложениях, включающих позиционирование, управление скоростью, синхронизацию и синхронизированное срабатывание. Они распространены в X-Y плоттерах, считывателях с перфорированной лентой, приводах головок гибких дисков, приводах каретки принтеров, приводах скольжения станков с числовым программным управлением и механизмах управления диафрагмой камеры.
Самым серьезным ограничением чисто электрического шагового двигателя является его мощность. В настоящее время это ограничено примерно 2,25 кВт.
(PDF) Исследование динамических характеристик шагового двигателя
323
Лукаш Варгула и др. / Procedure Engineering 177 (2017) 318-323
, указывается в соответствии с управляющим сигналом и затем останавливается с максимальным удерживающим моментом. Из-за ступенчатой работы шагового двигателя
возникают некоторые вибрации на низких скоростях.Причина их появления — инерция ротора и осевые нагрузки
. Двигатель превышает установленное положение, а затем возвращается в желаемое положение — требуется некоторое время, чтобы достичь
желаемого положения. Шаговый двигатель также имеет другую вибрационную характеристику для данной частоты механической системы
. Сегментация шага на микрошаги приводит к увеличению разрешения, что должно повысить плавность работы
. Применение микрошага является причиной значительного снижения потребляемой энергии из-за пульсации
подводимой энергии — это приводит к резонансу двигателя [8].Максимальная частота вращения также является причиной увеличения резонанса
. Испытания также показали, что двигатель характеризуется относительно ограниченным диапазоном вращательных скоростей
, на которых он может работать (рис. 5). Чем выше температура двигателя, тем ниже становится диапазон. Во время испытаний
температуру меняли, но не контролировали. Полученные в ходе
исследований периодически изменяемого движения частоты вращения и крутящие моменты не зависят от нагрузки двигателя и представляют собой заданные сигналы
(около 99.5% для нагруженного двигателя и 99% для ненагруженного двигателя). Однако эти результаты включают более высокие колебания
, чем результаты для шагового двигателя с постоянной скоростью в том же диапазоне скорости вращения (рис. 6). Полученная диаграмма
характеристик крутящего момента деформируется в окрестности максимального крутящего момента, поскольку на ротор
действует сила инерции, что приводит к перерегулированию и возмущению движения. Исследование двигателя при периодически изменяющейся работе с
постоянной нагрузкой показало «дрейф» сигнала крутящего момента.Причина этого факта — увеличение нагрузки на
, создаваемой тормозом — где нагрев магнитореологической жидкости приводит к увеличению сопротивления.
7. Резюме
Экспериментальные исследования показали, что при передаче периодически переменного сигнала
необходимо учитывать следующие факторы: минимальная и максимальная частота вращения шагового двигателя, возникновение зон резонансной частоты
работы шагового двигателя; время пуска и останова двигателя, значение создаваемого крутящего момента
, условия окружающей среды (рабочая температура).Повышенное значение колебаний крутящего момента шагового двигателя
при периодически изменяющемся движении может существенно мешать другим регистрируемым виброакустическим сигналам. Следует ожидать, что резонанс шагового двигателя
не позволит измерить параметрический резонанс зубчатого ремня
в цепной передаче. В случае оценки достигнутых максимальных скоростей вращения и крутящих моментов,
также должен учитывать влияние температуры двигателя, которое не отслеживалось во время испытаний.Дальнейшие исследования
будут проводиться для анализа влияния периодически изменяемых динамических управляющих сигналов на полученные
характеристики кинематических и динамических характеристик трансмиссий.
Ссылки
[1] С. Абрате, Вибрация ремня и привод ремня, Механизм и теория машин, Research Gate, DOI: 10.1016 / 0094-114X (92)
-O Ноябрь
, 1992.
[2] С. Чоудхути, Влияние вибрации вала на динамику зубчатой передачи и приводного ремня, диссертация, представленная при частичном выполнении требований Re-
для получения степени доктора философии в аспирантуре Университета штата Огайо, 201 0 .
[3] Дж. Джи, М. Дж. Джанг, О. Э. Квон, М. Дж. Чай, Х. С. Ким, Динамика передачи энергии в областях микро- и макропробуксовки для металлического клинового ремня с непрерывной передачей
с бесступенчатой трансмиссией при внешних вибрациях., International Journal автомобильной техники, 15, 7 (2014), 1119-1128.
[4] М. Красиньски, С. Стахонь, Динамические испытания зубчатой ременной передачи, Czasopismo Techniczne, Mechanika, Wydawnictwo Politechniki
Krakowskiej, 12-M / 2004 ISSN 0011-4561
[5] P.Krawiec, J. Adamiec, K.J. Waluś, Przekładnie cięgnowe o zmiennym przełożeniu z pasem zębatym., Logistyka, Instyt ut Logi styki i Maga-
zynowania, 6 (2014), 6026-6031.
[6] Л. Манин, Ф. Бессон, Г. Мишон, Р. Дюфур, Экспериментальное исследование динамических характеристик и неустойчивостей поперечных колебаний приводных ремней
. (2008) В: 16ème Colloque «Vibrations Chocs et Bruits», 11-13 июня 2008 г., Экулли, Франция,
http: //oatao.