Регуляторы скорости вращения вентиляторов
Способы регулирования скорости вращения вентиляторных двигателей
Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов
Тиристорные (симисторные) регуляторы скорости вращения
Электронный автотрансформатор
Сравнение регуляторов частоты вращения вентилятора
Способы регулирования скорости вращения вентиляторных двигателей
При использовании вентиляторов часто возникает необходимость регулирования частоты вращения. В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума, настроить необходимую производительность притока или вытяжки.
На настоящий момент широко распространены способы регулирования частоты вращения при помощи изменения электрических параметров питания вентилятора:
- изменение напряжения питания двигателя;
- изменение частоты питающего напряжения.

Регулирование напряжением осуществляется понижением питающего напряжения вентилятора. Преимуществом регулирования частоты вращения вентилятора изменением напряжения питания в относительно невысокой стоимости устройств, работающих по такому принципу. Известны следующие виды устройств для регулирования оборотов вентилятора при помощи понижения напряжения питания:
- Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов;
- Тиристорные регуляторы скорости вращения;
- Электронные автотрансформаторы.
Регулирование скорости понижением напряжения связано с изменением, так называемого, скольжения двигателя. При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя. При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности. Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
Регулирование вентилятора частотой питающего тока возможно осуществить при помощи частотного привода. У частотных приводов много преимуществ, но есть один существенный недостаток – их цена. Кроме того, они громоздки. Используемые в быту и для коммерческого использования вентиляторы обычно имеют невысокую цену. Вряд ли покупатель бытового вентилятора согласиться приобрести для него регулятор стоимостью, в десятки раз превышающую стоимость самого вентилятора. Поэтому в этой статье мы частотные приводы рассматривать не будем.
Ступенчатые регуляторы частоты вращения с использованием автотрансформаторов
Работа ступенчатых регуляторов скорости основана на использовании автотрансформаторов. Управление данными регуляторами осуществляется путем ступенчатого изменения напряжения питания. Регулирование скорости осуществляется вручную. Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.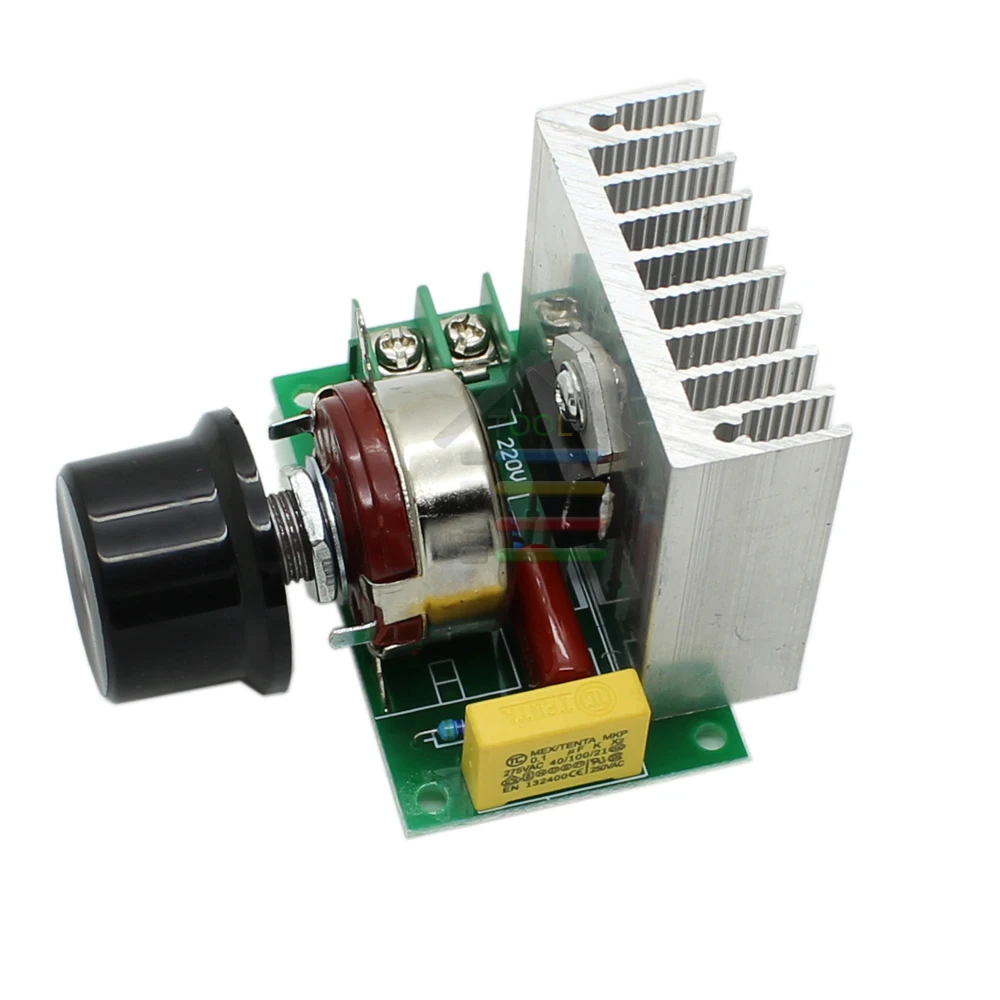
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
К преимуществам использования ступенчатых автотрансформаторов можно отнести чистую синусоиду на выходе и высокую перегрузочную способность. К недостаткам большую массу и габариты.
Примером регулятора частоты вращения со встроенным ступенчатым автотрансформатором является O’Erre RG 5 AR (на изображении выше). Данный регулятор позволяет включать вентилятор на 5-ти различных скоростях. Регулятор частоты вращения O’Erre RG 5 AR может управлять реверсивными вентиляторами. Также на него можно завести управление светом. Максимальная мощность подключаемого вентилятора 80 Вт. Регулятор RG 5 AR оснащен плавким предохранителем с номиналом 2 А-220 В.
Тиристорные (симисторные) регуляторы скорости вращения
В тиристорных регуляторах вращения используют принцип фазового управления, когда изменяется момент включения тиристоров относительно перехода сетевого напряжения через ноль. Для простоты обычно говорят, что изменяется выходное напряжение.
Для простоты обычно говорят, что изменяется выходное напряжение.
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) другими словами симистор. Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения. Таким образом, изменяется среднеквадратичное значение напряжения.
Есть ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры), однако для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- Установлен нижний порог напряжения подаваемого на двигатель вентилятора
- Мощность симистора выбирается так, чтобы его максимальный рабочий ток превышал рабочий ток вентилятора не менее, чем в 4 раза (при резистивной нагрузке в 2 А достаточно взять симистор также на 2 А).

- Предохранитель подбирается исходя из мощности электродвигателя (обычно максимальный ток предохранителя должен быть на 20% больше рабочего тока двигателя).
- Для более правильного формирования синусоиды установлен дополнительный фазосдвигающий демпфирующий конденсатор.
- Для уменьшения сетевых помех используется дополнительный конденсатор помехоподавления
К достоинствам тиристорных регуляторов можно отнести их малую стоимость, низкую массу и размеры. К недостаткам — использование для двигателей небольшой мощности, при работе возможен шум, треск, рывки двигателя, при использовании симисторов на двигатель попадает постоянное напряжение.
Тиристорные (симисторные) регуляторы частоты вращения применяются с вентиляторами, имеющими однофазные двигатели со встроенной автоматической термозащитой. Электродвигатель должен быть спроектирован для работы с регуляторами подобного типа.
Примером симисторого регулятора частоты вращения вентилятора служит Soler & Palau Reb-1N. Этот регулятор выпускается как для скрытой установки в стандартный подрозетник, так и для открытого монтажа. Регулятор имеет встроенный плавкий предохранитель. Возможна регулировка минимальной скорости вентилятора. Включение/выключение через колесо регулировки. Максимальная мощность подключаемого вентилятора 220 Вт.
Этот регулятор выпускается как для скрытой установки в стандартный подрозетник, так и для открытого монтажа. Регулятор имеет встроенный плавкий предохранитель. Возможна регулировка минимальной скорости вентилятора. Включение/выключение через колесо регулировки. Максимальная мощность подключаемого вентилятора 220 Вт.
Электронный автотрансформатор
Электронный автотрансформатор – это транзисторный регулятор напряжения. Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT). Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность. Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же, как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора заключаются в его небольших габаритах и массе, невысокой стоимости, чистой синусоиде на выходе и отсутствием гула на низких оборотах.
Недостатком можно назвать небольшое расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора).
Электронный автотрансформатор SB033
выполнен для установки на DIN-рейку. Регулятор имеет регулировку минимальной скорости вращения вентилятора. Работой регулятора можно управлять сигналом 0-10 В. Регулятор SB033 имеет реле статуса работы регулятора для подключения привода воздушной заслонки или калорифера. Светодиод на передней панели отображает статус работы или ошибки регулятора.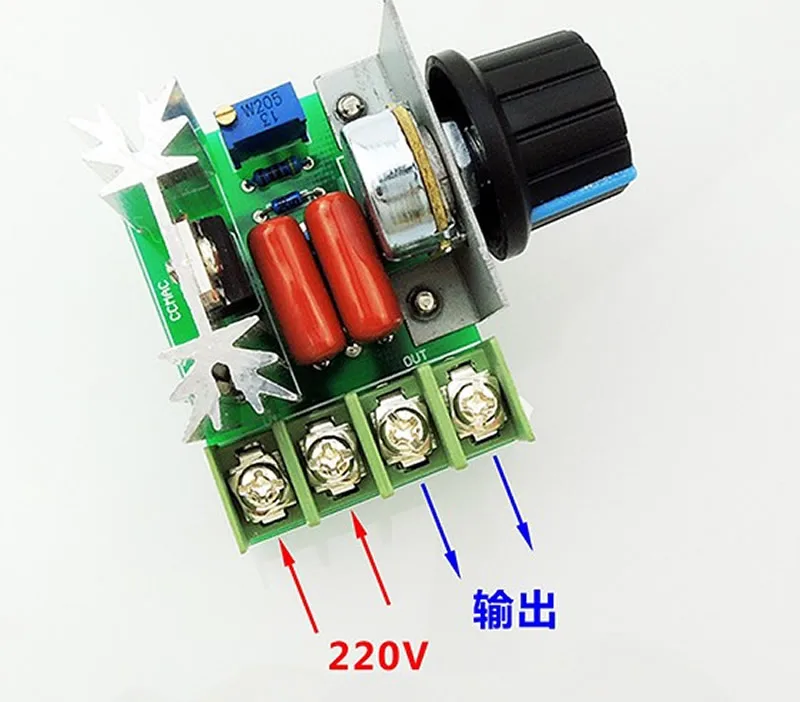 Возможно подключение к SB033 ручки управления, которая устанавливается в стандартный подрозетник.
Возможно подключение к SB033 ручки управления, которая устанавливается в стандартный подрозетник.
Сравнение регуляторов частоты вращения вентилятора
|
Наименование |
O’Erre RG 5 AR |
Soler & Palau Reb-1N |
SB033 |
|
Принцип работы |
Ступенчатый автотрансформатор |
Симисторный регулятор |
Электронный автотрансформатор |
|
Регулировка оборотов |
5 скоростей |
Плавная |
Плавная |
|
Мощность, Вт |
80 |
220 |
220 |
|
Синусоида |
чистая |
рваная |
чистая |
|
Способ установки |
Открытая |
Скрытая/открытая |
На DIN-рейку |
|
Подключаемый вентилятор |
Любой асинхронный |
Асинхронный, со встроенной термозащитой, должен быть спроектирован для работы с симисторными регуляторами |
Любой асинхронный |
|
Дополнительные возможности |
Возможно подключение реверсивного вентилятора, возможность включения света |
Регулировка минимальных оборотов, вкл/выкл через колесо регулировки оборотов |
Возможность управления 0-10 В, реле статуса работы, светодиодная индикация статусов работы и ошибок, возможно подключения ручки управления для установки в стандартный подрозетник |
|
Достоинства |
Высокая перегрузочная способность, возможность подключать несколько вентиляторов к одному регулятору |
Малая стоимость, малый размер |
Малый размер, экономичная работа, наибольшая долговечность вентилятора при использовании с электронным автотрансформатором по сравнению с другими регуляторами |
|
Недостатки |
При регулировании греется – отсюда потери электричества на нагрев |
Шум на малых оборотах |
Источник: teplo-spb. ru
ru
Ключевые слова: регуляторы частоты вращения вентилятора, вентиляторы
Регулятор скорости СРМ2.5щ — Вентавтоматика — Производство вентиляционной автоматики
Описание симисторного регулятора скорости СРМ2,5щ
Однофазный симисторный регулятор скорости СРМ2.5щ предназначен для встраиваемых решений в щиты управления на DIN-рейку.
Регулирование скорости электродвигателей осуществляется изменением напряжения в диапазоне 100-230 В.
Возможно два режима управления двигателем:
1. Локальный — управление оборотами двигателя с помощью потенциометра (номиналом 4,7-10 кОм) расположенного на лицевой панели регулятора скорости.
2. Дистанционный — управление оборотами двигателя от внешнего сигнала 0-10 В
Применение: наиболее часто применяется в системах вентиляции для регулирования скорости вращения канальных вентиляторов.
Схема подключения СРМ2,5Щ — локальный режим
Q1 — автоматический выключатель;
М1 — двигатель вентилятора на 220 В;
А1 — регулятор скорости СРМ2,5Щ.
Режим работы локальный — переключатель устанавливается в положение 1.
Управление скоростью вращения осуществляется от ручки на лицевой панели регулятора скорости.
Левое положение ручки соответствует напряжению 100 В, правое положение ручки соответствует напряжению 220 В
Схема подключения СРМ2,5Щ — дистанционный режим
Q1 — автоматический выключатель;
М1 — двигатель вентилятора на 220 В;
А1 — регулятор скорости СРМ2,5Щ.
Режим работы дистанционный — переключатель устанавливается в положение 2.
Управление скоростью вращения осуществляется осуществляется от внешнего сигнала 0-10 В или резистора 4,7 — 10 кОм.
Значение сигнала 0 В соответствует напряжению 100 В, значение сигнала 10 В соответствует напряжению 220 В
061h4240 Danfoss регулятор скорости вращения вентиляторов XGE-4M
Код заказа: 061h4240 Тип: XGE-4M
Регулятор скорости вращения вентиляторов конденсатора XGE со штуцером с накидной резьбой 1/4″ SAE с депрессором
Регуляторы скорости вращения вентиляторов широко применяются в холодильных установках и системах кондиционирования для снижения шума вентиляторов конденсатора и поддержания постоянного давления конденсации в различных климатических условиях. Регуляторы типа XGE надежны, очень компактны и являются идеальным решением для установок с вентиляторами небольшой производительности.
Регуляторы типа XGE надежны, очень компактны и являются идеальным решением для установок с вентиляторами небольшой производительности.
Установка регулятора скорости вращения вентиляторов конденсатора XGE допустима только на жидкостной линии после конденсатора воздушного охлаждения.
Формирование корзины и оформление заказа
Для покупки товара в нашем интернет-магазине выберите понравившийся товар и добавьте его в корзину. Далее перейдите в Корзину и нажмите на «Оформить заказ» или «Быстрый заказ».
Далее перейдите в Корзину и нажмите на «Оформить заказ» или «Быстрый заказ».
Оформление быстрого заказа
При оформлении быстрого заказа, напишите ФИО, телефон и e-mail. Вам перезвонит менеджер и уточнит условия и детали заказа.
Стандартное оформление заказа
Оформление заказа в стандартном режиме выглядит следующим образом: заполняете полностью форму по последовательным этапам: способ доставки, способ оплаты, реквизиты для выставления счета. Далее нажмите кнопку «Оформить заказ».
В процессе оформления Вам придет СМС с кодом подтверждения.
Если иное не указано в счете срок действия счета составляет три календарных дня с даты его выставления.

Счет на оплату будет выслан менеджером после оформления заказа и согласования деталей и условий поставки в телефонном разговоре или email-переписке.
Вы можете выбрать следующие варианты доставки интересующего холодильного и теплообменного оборудования:
1. Самовывоз со склада «ТРЕЙД ГРУПП»
Адрес склада: 125438, г. Москва, Лихоборская наб., дом 9Обращаем ваше внимание: Самовывоз осуществляется после оплаты оборудования и согласования с Вашим менеджером даты и времени отгрузки товара. При получении товара у экспедитора обязательно должна быть доверенность с печатью от компании-плательщика или сама печать.
2. Поставка в регионы
- Доставка в города Российской Федерации осуществляется транспортными компаниями и рассчитывается по их тарифам.

- На постоянной основе «ТРЕЙД ГРУПП» доставляет Товар до терминала транспортной компании «Деловые линии» в г. Москва.
- Стоимость доставки Товара до терминала транспортной компании «Деловые линии» включается в цену Товара. Дальнейшая транспортировка Товара до склада Покупателя осуществляется силами и за счет Покупателя.
- Доставка грузов до терминала «Деловые линии» производится ежедневно.
- При необходимости отправки Товара другой транспортной компанией сообщите эту информацию Вашему менеджеру.
Транзистор С107м Аннотация: T25000 SCR ТРАНЗИСТОР 8TA41600B SC160D T106F1 SCR TIC106M SCR SC136B Симистор Q2006R5 BTA417008 | OCR сканирование | 1N4001 1N4002 1N4003 1N4004 1N4005 1N4006 1N40Q7 1N4622 1N4732 1N4733 Транзистор С107м т25000 SCR ТРАНЗИСТОР 8TA41600B SC160D T106F1 SCR TIC106M SCR SC136B симистор Q2006R5 BTA417008 | |
2007 — симисторная защита от перенапряжения Аннотация: 1.5ke transil симистор демпфер расчет симистор демпфер варистор параллельный симистор переменного тока 12 симистор AN1172 225 симистор TRIAc AN1966 | Оригинал | AN1966 защита от перенапряжения симистора 1.5ке трансил расчет демпфера симистора варистор демпферный симистор параллельный симистор acs 12 симистор AN1172 225 симистор TRIAc AN1966 | |
S106D1 Аннотация: scr s106d1 SC165M HSC160MTA S106B1 TRIAC S106D1 c106b1 scr IS08s TO92 симистор SIPT515TA | Оригинал | 2N1842 SPS020 / F 2N1843 2N1844 SPS120 / F 2N1845 2N1846 SPS220 / F S106D1 scr s106d1 SC165M HSC160MTA S106B1 TRIAC S106D1 c106b1 scr IS08s TO92 симистор SIPT515TA | |
1998 — симистор 220в диммер Аннотация: для управления скоростью асинхронного двигателя используется симистор на основе симистора Мягкий пуск диак с симистором переменного тока схема управления скоростью двигателя симисторный диммер микроконтроллер с переходом через ноль c Оптопара с симисторными цепями Плавный запуск симистора 240 В параллельный симистор как сопрягать оптопару с симисторным симистором диак. | Оригинал | 110/240 В симистор 220 v диммер управление скоростью асинхронного двигателя используется на основе симистора Плавный пуск симистора схема управления скоростью двигателя переменного тока диак с симистором микроконтроллер диммера симистора с переходом через ноль c Оптопара с симисторными цепями Плавный пуск симистора 240в параллельный симистор как связать оптопару с симистором принципиальная схема применения симистора диак. | |
2004 — TRIAC BTB 12 600 B Реферат: инструкция по применению симистора защиты транзитный диод AN1966 3 квт симистор TRIAC BTB 16.600b TRIAC BTB 16 TRIAC BTB 04 Transil diode Схема управления затвором симистора 600 В | Оригинал | AN1966 TRIAC BTB 12 600 B Примечание по применению защиты симистора переходной диод AN1966 3 квт симистор TRIAC BTB 16.600b TRIAC BTB 16 TRIAC BTB 04 переходной диод 600V схема управления затвором симистора | |
1994 — Регулятор яркости TRIAC I2C Аннотация: Triac soft start 240v diac с симистором схема управления скоростью двигателя переменного тока параллельный симистор диак с симистором универсальное управление скоростью двигателя TRIAC BTA 220v светорегулятор оптрон симистор симисторный диммер микроконтроллер с переходом через ноль c симистор 220v светорегулятор | Оригинал | 110/240 В Регулятор яркости TRIAC I2C Плавный пуск симистора 240в схема управления скоростью двигателя переменного тока диак с симистором параллельный симистор диак с симисторным регулятором скорости универсального двигателя TRIAC BTA 220v диммер оптопара симистор микроконтроллер диммера симистора с переходом через ноль c симистор 220 v диммер | |
2004 — TRIAC BTB 12.600 Реферат: схема генерации импульса включения симистора симистор BTA 12-400 TRIAC BTB 16.600 HOLDING CURRENT TRIAC BTA 12,600B симистор BTA 06.600 T triac diac применения принципиальная схема симисторное управление дугой TRIAC BTA 12 схема запуска симистора с использованием dic 220v | Оригинал | AN303 TRIAC BTB 12.600 схема генерации запускающего импульса симистора симистор БТА 12-400 TRIAC BTB 16.600 ХОЛДИНГ ТЕКУЩИЙ TRIAC BTA 12,600B симисторы БТА 06.600 т принципиальная схема применения симистора диак. управление дугой симистора TRIAC BTA 12 Схема включения симистора с использованием диак 220В | |
1997 — Симистор медленный на Аннотация: Примечание по применению BT136 OM1654 bt134 симистор диммер симистор bt151 симистор демпфер симистор расчёт демпфера BT151 схема контактов симистора diac bt136 управление скоростью двигателя BT151 | Оригинал | ||
2008 — TRIAC BTB 16 600 BW Аннотация: симистор bta06 Z0405 эквивалентный TRIAC BTB 12.600 технический паспорт TRIAC BTA 16 600b OPTO TRIAC Z0409 эквивалент Эквивалент симистора TRIAC индуктивный справочник по симисторам | Оригинал | AN439 TRIAC BTB 16 600 BW симистор bta06 Эквивалент Z0405 Технический паспорт TRIAC BTB 12.600 TRIAC BTA 16 600b OPTO TRIAC Эквивалент Z0409 Эквивалент симистора Индуктивный TRIAC справочник по симисторам | |
1999 — БТБ15-600Б Аннотация: расчет симистора демпфера TRIAC RCA BTB15-600B эквивалентный RC демпферный двигатель переменного тока RC демпферный расчет симистор RC демпферный симистор демпферный тиристор SCR 600V 8A BTB15600B | Оригинал | ||
1995 — BT 130 симистор Аннотация: симистор BT 16 рейтинг BTA16-600b приложение управления двигателем BTA26-600B схема BTa16-600bw приложение управление двигателем симистор электродвигателя переменного тока bta12 принципиальная схема симистор BT 130 BTA16-600B схема управления нагревом симистор электродвигателя переменного тока bta16 принципиальная схема микроволновая печь трансформатор | Оригинал | ||
1999 — W237-02P Аннотация: схема применения симистора BZX84C4U7 микроконтроллер базовый симистор фазовый контроль угла трехфазный симистор управление симистором схема управления электродвигателем переменного тока с симистором pid симистор медленный на симисторе TIC206 схема управления скоростью электродвигателя переменного тока с симистором | Оригинал | MSP430 16 бит SLAA043A 16-битный W237-02P принципиальная схема применения симистора BZX84C4U7 управление фазовым углом симистора на базе микроконтроллера трехфазное управление симистором схема управления симистором управление двигателем переменного тока с помощью симистора pid Симистор медленно включен симистор TIC206 Схема управления скоростью двигателя переменного тока с симистором | |
2006 — OM1862 Реферат: управление разрядом симистора OM1682A управление мощностью симистора трехфазный нейтрализатор симистора управление нагревателем термостат пропорциональный симистор термостат пропорциональный симистор прецизионный симистор прецизионная схема управления симистором схема | Оригинал | OM1682A OM1682A OM1862 контроль разрыва симистора регулировка мощности симистора управление нагревателем трехфазного симистора ntc пропорциональный симистор термостата Точность пропорционального симистора термостата Цепь управления TRIAC схема управления симистором | |
1995 — TRIAC BTB 12.600 Реферат: управление дугой симистора TLS106-6 схема генерации импульса зажигания симистора TRIAC BTB 12.600 паспорт SGS Z0102MA TRIAC BTB 04 схема зажигания тиристора симистор диак приложение принципиальная схема sgs Thomson тиристор | Оригинал | ||
1995 — TRIAC BTB 04 Аннотация: Примечание по применению 16.600b симистора защита симистора схема управления затвором выбор симистора переходный диод симистор на 220 симистор TRIAC BTB 600b TRIAC BTB 16.600b | Оригинал | 000 В / с) 00 Вт / 1 мс) TRIAC BTB 04 16,600b Примечание по применению защиты симистора схема управления затвором симистора выбор симистора переходной диод Симистор до 220 симистор TRIAC BTB 600b TRIAC BTB 16.600b | |
симистор CF 406Аннотация: Стабилизатор напряжения в цепи плавного пуска триака с использованием схемы плавного пуска симистора Замечания по применению плавного пуска симистора MLX Схема генерации импульса плавного пуска симистора диммера света Схема плавного пуска двигателя переменного тока ИС ТРИАК ФАЗОВЫЙ КОНТРОЛЛЕР | Оригинал | MLX 50 Гц / 60 Гц MLX902xx MLX 22 августа 1998 г. плавный пуск диммера схема генерации запускающего импульса симистора ИС плавного пуска двигателя переменного тока КОНТРОЛЛЕР УГЛОВОГО УГЛА ТРИАКА | |
1998 — ТРИАК 137 Реферат: bcd to hex TRIAC PHASE ANGLE CONTROLLER triac 139 MOC3021 Применение опто-симистора Угловое управление фазой TRIAC 137 PIN OUT OPTO TRIAC опто-симистор moc3021 параллельный симистор » | Оригинал | PIC12C5XX MOC8021 DS40160A / 5 017-стр. TRIAC 137 bcd в шестнадцатеричный КОНТРОЛЛЕР УГЛОВОГО УГЛА ТРИАКА симистор 139 Приложение MOC3021 управление фазой угла опто-симистора ВЫХОД ТИРАКА 137 OPTO TRIAC опто-симистор moc3021 параллельный симистор | |
1999 — ДИАК Бр100 Аннотация: симистор 216 MSD306 MSD308 diac с симистором переменного тока, регулировка скорости, диак, схема управления симистором, электродвигатель, диак, 220 В, схема управления симистором, электродвигатель MSD300 MSD301, TRIAC BR100 | Оригинал | ||
1999 — симистор 216 Резюме: Справочник по RC-демпфирующему dv / dt-тиристору Симистор медленный на RC-демпфирующем двигателе переменного тока SCS тиристор Трехфазный мотор-симистор RC-демпферный тиристор Конструкция тиристора с параллельным симистором Коммутация триака с трехфазным управлением | Оригинал | FS013 симистор 216 RC snubber dv / dt справочник Симистор медленно включен RC демпферный двигатель переменного тока scs тиристор Трехфазный моторный симистор Конструкция демпфирующего тиристора RC параллельный симистор коммутация симистора трехфазное управление симистором | |
2004 — TRIAC BTB 16 600 BW Реферат: TRIAC BTa 12 600 BW, инструкция по применению, переход через ноль, оптический диак BTA16-600b, приложение, управление двигателем, BTB16-600bw, приложение, управление двигателем, симистор двигателя переменного тока, bta16, симистор двигателя переменного тока, bta16, принципиальная схема, симистор, диак, приложения, принципиальная схема, TRIAC, BTa, 16 600 BW, указание по применению, управляющий симистор DIAC 220 в переменного тока 50 Гц | Оригинал | AN439 TRIAC BTB 16 600 BW Рекомендации по применению TRIAC BTa 12 600 BW оптический диак, пересекающий нулевой уровень Управление двигателем приложения BTA16-600b Управление двигателем приложения BTB16-600bw двигатель переменного тока симистор bta16 электрическая схема симистора двигателя переменного тока bta16 принципиальная схема применения симистора диак. Рекомендации по применению TRIAC BTa 16 600 BW управляющий симистор DIAC 220v ac 50hz | |
2004 — беззабойный симистор Fairchild Аннотация: схематическое обозначение TRIAC FT 12 для металлооксидного варистора SURGE IEEE-472 симистор с фазовым управлением симистор демпферный варистор POWER TRIAC MOC3052 ЦЕПИ ПРИМЕНЕНИЯ moc3051 MOC3052M | Оригинал | MOC3051-M MOC3052-M MOC3051-M MOC3052-M Fairchild сглаживающий симистор TRIAC FT 12 схематическое обозначение металлооксидного варистора SURGE IEEE-472 управление фазой симистора варистор демпферный симистор СИЛОВОЙ ТРИАК ЦЕПИ ПРИМЕНЕНИЯ MOC3052 moc3051 MOC3052M | |
2002 — Применение TRIAC moc3023 Light Dimmer со схемой Аннотация: диммер moc3023 Оптопара с симистором MPSa40 Применение Оптрон с триаком Светорегулятор со схемой Схема управления скоростью электродвигателя переменного тока с симистором Схема управления скоростью электродвигателя переменного тока с симистором УНИВЕРСАЛЬНАЯ ЦЕПЬ СКОРОСТИ ДВИГАТЕЛЯ симисторный оптопара как сопрягать оптрон с симистором светорегулятор moc3023 | Оригинал | Ан-3006 AN300000xx Применение TRIAC moc3023 Light Dimmer со схемой moc3023 диммер Оптопара с симистором МПСа40 Применение оптопары TRIAC Light Dimmer со схемой Схема управления скоростью двигателя переменного тока с симистором Схема управления скоростью двигателя переменного тока с симистором УНИВЕРСАЛЬНЫЙ ДВИГАТЕЛЬ SPEED CIRCUIT симисторный оптрон как связать оптопару с симистором moc3023 диммер | |
RC демпфер, конструкция scr, индуктивная нагрузка Аннотация: симистор RC демпфер Затвор выключить симистор Нагрузка симистора индуктивная RC индуктивная нагрузка конструкция тиристора конструкция симистора демпферный симистор TRIAC индуктивный симистор демпферный симистор с демпфером TRIAC инструкция по применению демпфер | Оригинал | IL410, IL420.26 октября 2005 г. RC демпфер, конструкция scr, индуктивная нагрузка симистор RC демпфер Ворота выключают симистор Индуктивная нагрузка симистора Конструкция тиристора с индуктивной нагрузкой RC конструкция демпфера симистора Индуктивный TRIAC демпфер симистора симистор с демпфером Демпфер для указаний по применению TRIAC | |
тиристор ДТФ Аннотация: bt138e BTA208-600B эквивалент BT136 примечание по применению om1654 BT136 TRIAC эквивалент BT151 управление скоростью двигателя Симисторная схема управления двигателем TRIAC MAC 15A ЗАМЕНА ТРАНЗИСТОРА 1993 | OCR сканирование | ||
2005 — TRIAC FT 12 Аннотация: симисторный фазовый регулятор Fairchild snubberless triac 400v 15A симисторное реле ртутный симистор демпфер варистор схема управления скоростью двигателя переменного тока с симистором RC демпфер регулируемый диммер схема твердотельное реле Triac медленное включение | Оригинал | MOC3051M, MOC3052M MOC3051M MOC3052M E, TRIAC FT 12 управление фазой симистора Fairchild сглаживающий симистор 400v 15A симистор реле ртутное смачивание варистор демпферный симистор Схема управления скоростью двигателя переменного тока с симистором симистор RC демпфер полупроводниковое реле с регулируемой диммерной схемой Симистор медленно включен | |
 org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»> org/Product»>
org/Product»>/F036M_(6-90V-15A)-02.JPG) org/Product»>
org/Product»> org/Product»>
org/Product»>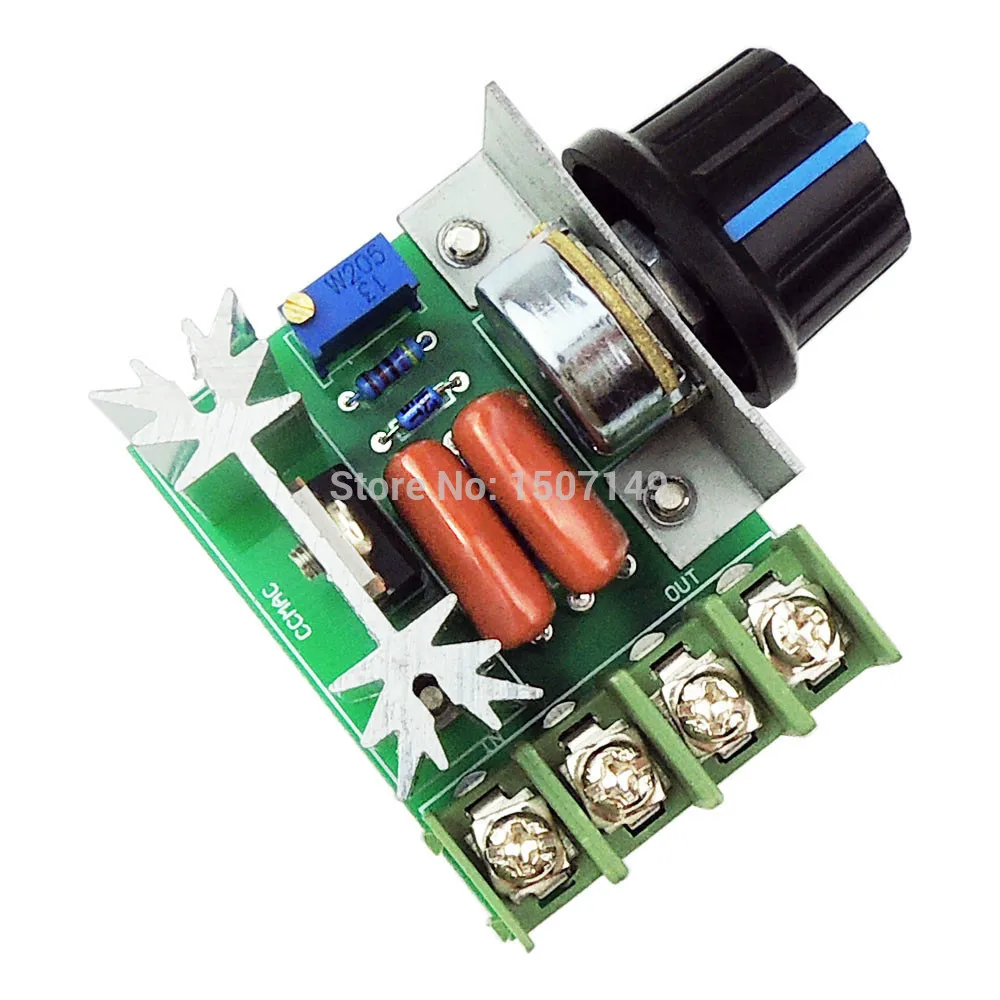 17 / Мая / 00 симистор cf 406 Схема плавного пуска TRIAC регулятор напряжения с использованием симистора схема плавного пуска симистора Плавный пуск симистора инструкция по применению MLX
17 / Мая / 00 симистор cf 406 Схема плавного пуска TRIAC регулятор напряжения с использованием симистора схема плавного пуска симистора Плавный пуск симистора инструкция по применению MLX org/Product»>
org/Product»> org/Product»>
org/Product»>Универсальный контроллер скорости двигателя переменного тока на базе Arduino
ВведениеВНИМАНИЕ !!! Сначала напишу цитату:
СТОП !!! Эта цепь подключена к напряжению 110-220 мА.Не создавайте это, если вы не уверены в том, что делаете. Отключите его, прежде чем приблизиться к печатной плате. Пластина охлаждения симистора подключена к сети. Не прикасайтесь к нему во время работы. Поместите его в подходящий корпус / контейнер.
ПОДОЖДИТЕ !!! Позвольте мне добавить здесь более сильное предупреждение: эта схема безопасна, если она построена и реализована только людьми, которые знают, что они делают. Если вы не имеете ни малейшего понятия или сомневаетесь в том, что делаете, скорее всего, вы будете МЕРТВЫ !!! НЕ ТРОГАЙТЕСЬ ПРИ ПОДКЛЮЧЕНИИ К СЕТИ !!!
Теперь позвольте представить мой проект.Это регулятор скорости двигателя, управляемый Arduino, который использует метод диммирования с отсечкой фазы и алгоритм PID.
Основные характеристики контроллера:
- Два диапазона скорости для более быстрого изменения желаемого числа оборотов.
- Поворотный энкодер позволяет установить желаемое число оборотов перед запуском двигателя.
- Кнопка энкодера запускает и останавливает двигатель.
- ЖК-дисплей 2×16 для отображения состояния и частоты вращения.
- Плавный пуск двигателя.
- Сохраняет число оборотов и крутящий момент при нагрузке.
- Управление скоростью и крутящим моментом с помощью алгоритма ПИД.
- Защита двигателя от заклинивания (или неисправности датчика скорости).
- Защита от превышения скорости (обычно при повреждении симистора).
Есть видео, где можно посмотреть, как работает контроллер:
Защита двигателя при работе:
Как все начиналось
После просмотра этого видео (на русском языке):
Решил построить аналогичный токарный станок. И успешно повторил этот проект.Конечно, с некоторыми изменениями. Осталось только одно — мотор. Сначала я использовал асинхронный однофазный двигатель с рабочим конденсатором. Основные недостатки такого двигателя:
- Отсутствие дешевой регулировки скорости. Ни механического, ни электронного. Придется использовать комплект шкивов или дорогой электронный контроллер.
- Ограниченная скорость — всего 1400 об / мин.
- Ограниченное время работы — 10 минут работы / 6 минут простоя. В противном случае он станет горячим.
Как вы могли заметить, парень на видео использовал мотор, утилизированный от старой стиральной машины.Такой же мотор был у меня в мастерской. Осталось только одно — регулятор скорости мотора. Без него мотор будет раскручиваться на максимуме 15000-19000 об / мин. Это слишком много для токарного станка по дереву. Чтобы контролировать скорость двигателя, мы могли бы использовать регулятор напряжения SCR, но на низких оборотах двигатель будет слабым и не будет крутящего момента. К счастью, в двигателях такого типа есть датчики тахометра, и мы можем создать систему с замкнутым контуром, чтобы иметь стабильные обороты даже при нагрузке и контролировать крутящий момент.
В поисках решенияХорошо известна микросхема TDA1085, которая специально разработана для управления двигателями с датчиками скорости вращения.Но у меня этого чипа не было, и чтобы увидеть обороты, пришлось сделать тахометр. В китайских историях я нашел дешевый регулятор скорости двигателя переменного тока с функцией стабилизации оборотов. Я купил один и протестировал. Все нормально, кроме нескольких вещей:
- Всего 400Вт. (можно увеличить, заменив симистор)
- Макс.об / мин — 1450! После того, как мои использованные шкивы будут только около 480 об / мин!
- Нет индикации оборотов.
После серфинга в Интернете я нашел несколько проектов регуляторов скорости и решил сделать свой собственный контроллер, используя найденные идеи.
Вот список ресурсов, которые я использовал:
- Много теории. Также отсюда я использовал часть схемы измерения тахометра.
- Также примечание по применению NXP. Много полезной информации.
- Немного теории, полезного кода и схемы здесь.
- Принял идеи и взял отсюда (русский) код.
- Код затемнения, который я использовал отсюда (ИМХО лучший диммер).
- Код подсчета оборотов взял отсюда (русский).
- Взял отсюда несколько фрагментов кода использования PID.
- Библиотека PID.
- Описание библиотеки PID. Также здесь.
- Некоторая полезная информация об использовании библиотеки PID.
Я не буду приводить теорию, как работает отсечка фазы переменного тока, потому что здесь нет ничего нового. Выше я привел некоторые ссылки на теорию регулирования яркости и управления двигателем (первая и вторая ссылки). NXP и Microchip содержат много полезной информации об управлении двигателями.
Принципиальная схема, нарисованная отдельными блоками:
- Arduino Nano V3
- 16×2 HD44780 LCD с модулем PCF8574 I2C.(Данная схема модуля не точна!).
- Обнаружение импульсов тахометра. Использует компаратор LM393 для преобразования импульсов тахометра на уровень микроконтроллера.
- Обнаружение пересечения нуля. Каждый раз, когда линия переменного тока пересекает нулевую точку, микроконтроллер получает сигнал. Цепь высокого напряжения изолирована от микроконтроллера с помощью оптрона.
- Схема управления реле, выполненная с использованием простого переключающего транзистора NPN.
- Цепь управления двигателем изолирована оптопарой и использует симистор со схемой демпфера (C4, R14).Возможно использование безнапорных симисторов (тогда C4 и R14 не требуются).
- Модуль питания переменного / постоянного тока. Достаточно 5В, 0,5-1А. Я использовал старое зарядное устройство USB для телефона.
- Поворотный энкодер, переключатель линии питания 10А с индикацией, любой 3-позиционный переключатель для переключения диапазона оборотов.
Все компоненты распаяны на макетной плате. Для дополнительных контроллеров я прослежу печатную плату. Некоторые фото:
Я использовал симистор BTA41, потому что он был у меня на складе. Можно использовать симистор на 10-16 ампер. Я.е. BTA16.
Полный список используемых компонентов вы можете найти в текстовом файле в zip-архиве.
КонструкцияВ моей мастерской был пластиковый корпус, который соответствовал моим требованиям. Поэтому я использовал его для этого проекта. Размеры коробки: В 150 мм (~ 5,9 дюйма), Ш 70 мм (~ 2,76 дюйма), Д 110 мм (~ 4,33 дюйма),
Несколько слов о кодеЯ пробовал много алгоритмов управления двигателем и синхронизации с отсечкой фазы, но большинство из них У них были свои минусы: управление двигателем было нестабильным, иногда он прыгал при старте, иногда при беге.Иногда мотор по неизвестной причине разгонялся до максимальных оборотов. В конце концов я решил использовать и понять метод ПИД-регулирования.
Код использует 2 внешних прерывания. Один для перехода через ноль, один для датчика тахометра. Таймер для управления задержкой импульсов симистора. Алгоритм PID для управления выходом в зависимости от уставки и входа. Для плавного пуска мотора я сделал алгоритм разгона RAMP. Во время пуска параметры ПИД-регулятора имеют более низкие значения и возвращаются к нормальным значениям во время работы двигателя. Это предотвращает резкий запуск двигателя (скачок).
Интервал обновления ЖК-дисплея составляет 2 секунды. Достаточно наблюдать за реальным изменением оборотов. Увеличение скорости может повлиять на стабильность системы. Это потому, что в ЖК-библиотеке используются функции задержки.
Я использовал множество глобальных переменных, чтобы упростить настройку системы под ваши нужды и различные двигатели. Позже выложу в архив скетчи тестов и тюнинга.
Все используемые библиотеки можно найти в zip-архиве.
ЗаключениеЯ доволен тем, как работает мой самодельный контроллер. Теперь мне нужно установить двигатель на токарный станок и проверить его в реальных условиях.
Хочу поблагодарить коллег из групп Arduino в Facebook за помощь. И спасибо жене за терпение: D
Комментарии и вопросы приветствуются.
Простите за английский. 😉
ОбновлениеЯ добавил в свой код один новый параметр. Это передаточное число шкива. В моем случае это 2,96. Это разница между меньшим шкивом на двигателе и большим на шпинделе. Шкивы, которые я использовал, были взяты из брошенных машин. Используйте эскиз без параметра соотношения или установите его на 1, если шкивы не будут использоваться.
Смонтировал мотор на токарном станке и немного проверил. Я счастлив. Все работает как положено. Крутящего момента хватает даже на малых оборотах.
Скоро сделаю крышку двигателя, держатель для блока управления и т.д.
Универсальный регулятор скорости двигателя, с контролем ускорения и симистором BTA41 Rev. 2 — Поделиться Project
ВВЕДЕНИЕ С шести лет я подумал, что было бы круто сделать своего собственного веб-кастера.Не зная тогда многого, я подумал, что могу использовать леску с присоской на конце, и это может помочь. 3D-принтеры только становились доступными, а у нас их в то время не было. Итак, идея проекта была отложена. С тех пор мы с папой стали Творцами. Это натолкнуло меня на мысль, что, если бы в «Стихах-пауках» был другой персонаж — скажем, 14 лет, единственный ребенок, выросший со старыми моторами и механическими деталями в подвале и электронными приборами. У него накопилось два 3D-принтера и сварщик.В 9 лет он открыл канал Maker (Raising Awesome). Его отец импульсивно купил швейную машинку в Prime Day, и ТОГДА, в 14 лет, его укусил радиоактивный жук Maker … ну, паукообразный. Сначала он был Создателем, а затем получил свои паучьи способности. На что был бы похож этот персонаж? Итак, мы придумали перчатку Веблингера и схему Spidey-Sense Visual AI. ДИЗАЙН ПРОЕКТА Вебслингер В перчатке веблингера находится 16-граммовый баллончик с СО2, с помощью которого можно выстрелить в крючок, привязанный к кевлару. Для этого не требуется никакого микроконтроллера, только клапан, который вы найдете для накачивания велосипедных шин.У него будет двигатель в перчатке, чтобы отследить кевлар. Spider-SenseКамера и amp; датчик приближения был вшит в спину рубашки. Raspberry Pi A + служил мозгом для всего костюма, управляя всеми датчиками и камерами внутри костюма. Наряду с этим мы использовали Pi SenseHat со встроенным дисплеем RGB для изменения логотипов, например, при срабатывании «Spidey Sense». Учитывая время этого конкурса, я смог выиграть последний костюм на Хеллоуин. Вы можете найти модель на нашем сайте GitHub: https: // github.com / RaisingAwesome / Spider-man-Into-the-Maker-Verse / tree / master. Это код для запуска RGB и вибрации: from sense_hat import SenseHat время импорта импортировать RPi.GPIO как GPIO # Режим GPIO (ПЛАТА / BCM) GPIO.setmode (GPIO.BCM) # установить контакты GPIO GPIO_ECHO = 9 GPIO_TRIGGER = 10 GPIO_VIBRATE = 11 # установить направление GPIO (IN / OUT) GPIO.setup (GPIO_TRIGGER, GPIO.OUT) GPIO.setup (GPIO_ECHO, GPIO.IN) GPIO.setup (GPIO_VIBRATE, GPIO.ВНЕ) смысл = SenseHat () г = (0, 255, 0) б = (0, 0, 255) у = (255, 255, 0) ш = (255,255,255) г = (204, 0, 0) a1 = [ б, г, б, б, б, б, г, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, б, б, б, г, г, б, б, б, г, г, г, г, г, р, г, г, б, б, б, г, г, б, б, б, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] a2 = [ б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, б, г, б, б, г, б, б ] a3 = [ г, б, б, б, б, б, б, г, б, г, б, б, б, б, г, б, б, б, г, г, г, г, б, б, г, б, б, г, г, б, б, г, б, г, г, г, г, г, г, б, г, б, б, г, г, б, б, г, б, б, г, б, б, г, б, б, б, г, б, б, б, б, г, б ] def animate (): # dist дано в футах.# скорость рассчитывается по линейному уравнению y = mx + b, где b = 0 и m = 0,1 sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a2) time.sleep (0,05 * расстояние ()) sense.set_pixels (a1) time.sleep (0,05 * расстояние ()) sense.set_pixels (a3) time.sleep (0,05 * расстояние ()) def distance (): # Возвращает расстояние в футах StartTime = time.time () timeout = time.time () timedout = Ложь # установите для Trigger значение HIGH, чтобы подготовить систему GPIO.вывод (GPIO_TRIGGER, True) # установите Триггер через 0,00001 секунды (10 мкс) на НИЗКИЙ, чтобы отправить пинг от датчика time.sleep (0,00010) GPIO.output (GPIO_TRIGGER, ложь) # чтобы не ждать вечно, установим тайм-аут, если что-то пойдет не так. а GPIO.input (GPIO_ECHO) == 0: # если мы не получили ответ, чтобы сообщить нам, что он собирается пинговать, двигайтесь дальше. # датчик должен сработать, сделать свое дело и начать отчитываться через миллисекунды.StartTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True сломать #print («Истекло время ожидания эхо от низкого до высокого:», время ожидания) timeout = Время начала StopTime = Время начала а GPIO.input (GPIO_ECHO) == 1: # если мы не получим отскока на датчике с верхней границей его диапазона обнаружения, двигайтесь дальше. # Ультразвук движется со скоростью звука, поэтому он должен возвращаться, по крайней мере, # быстро для вещей, находящихся в пределах допустимого диапазона обнаружения.timedout = Ложь StopTime = time.time () если (time.time () & gt; тайм-аут + .025): timedout = True сломать #print («Тайм-аут эха от высокого до низкого:», время ожидания) # записываем время, когда оно вернулось к датчику # разница во времени между стартом и прибытием TimeElapsed = StopTime — Время начала # умножаем на звуковую скорость (34300 см / с) # и разделим на 2, потому что он должен пройти через расстояние и обратно # затем преобразовать в футы, разделив все на 30.48 см на фут расстояние = (Истекшее время * 17150) / 30,46 #print («Расстояние:», расстояние) если (расстояние & lt; .1): расстояние = 5 distance = round (расстояние) если расстояние & lt; 5: вибрировать () расстояние возврата def vibrate (): # если что-то очень близко, вибрируйте spidey-sense #code pending GPIO.output (GPIO_VIBRATE, Истина) time.sleep (.1) GPIO.output (GPIO_VIBRATE, ложь) # Следующая строка позволит этому скрипту работать автономно, или вы можете # импортировать сценарий в другой сценарий, чтобы использовать все его функции.если __name__ == ‘__main__’: пытаться: GPIO.output (GPIO_TRIGGER, ложь) GPIO.output (GPIO_VIBRATE, ложь) время сна (1) в то время как True: анимировать () # Следующая строка — это пример из импортированной библиотеки SenseHat: # sense.show_message («Шон любит Бренду и Коннора !!», text_colour = желтый, back_colour = синий, scroll_speed = .05) # Обработка нажатия CTRL + C для выхода кроме KeyboardInterrupt: print («\ n \ nВыполнение Spiderbrain остановлено.\ n «) GPIO.cleanup () Визуальный AII Если вы видели Человека-паука: Возвращение домой, вы бы знали о совершенно новом ИИ под брендом Старка, Карен, которую Питер использует в своей маске, чтобы помочь ему в миссиях. Карен была разработана, чтобы иметь возможность выделять угрозы и предупреждать Питера о его окружении, а также управлять многими функциями его костюма. Хотя создание чат-бота с ИИ, который отвечает голосом и чувством эмоций, может быть не самой простой задачей для этого соревнования, мы все же заранее продумали возможность включения способа создания этого искусственного «паучьего чутья».«Мы решили, что сейчас самое подходящее время, чтобы воспользоваться всплеском популярности Microsoft Azure и API машинного зрения, предоставляемого Microsoft. Мы создали решение« видеть в темноте »с Raspberry Pi Model A и камера NoIR: облачный сервис Microsoft Computer Vision может анализировать изображения, снятые камерой Raspberry Pi (также известной как моя камера Pi-der), прикрепленной к ремню. Чтобы активировать это сверхшестое чувство, у меня есть как только акселерометр Sense Hat стабилизируется, снимок будет сделан автоматически.Используя личную точку доступа моего мобильного телефона, API Azure анализирует изображение, а пакет eSpeak Raspberry Pi сообщает мне об этом через наушник. Это позволяет костюму определять, приближается ли за мной машина или злой злодей. Python Visual AI для Microsoft Azure Machine Vision: import os запросы на импорт из Picamera импорт PiCamera время импорта # Если вы используете блокнот Jupyter, раскомментируйте следующую строку. #% matplotlib встроенный import matplotlib.pyplot как plt из PIL импорта изображения из io импорт BytesIO камера = PiCamera () # Добавьте ключ подписки Computer Vision и конечную точку в переменные среды. subscription_key = «ЗДЕСЬ ВАШ КЛЮЧ !!!» endpoint = «https://westcentralus.api.cognitive.microsoft.com/» Analyse_url = конечная точка + «видение / версия 2.0 / анализ» # Установите image_path равным локальному пути к изображению, которое вы хотите проанализировать. image_path = «image.jpg» def spidersense (): камера.start_preview () время сна (3) camera.capture (‘/ home / spiderman / SpiderBrain / image.jpg’) camera.stop_preview () # Считываем изображение в байтовый массив image_data = open (image_path, «rb»). read () headers = {‘Ocp-Apim-Subscription-Key’: subscription_key, ‘Content-Type’: ‘application / octet-stream’}. params = {‘visualFeatures’: ‘Категории, Описание, Цвет’} ответ = запросы.post ( analysis_url, headers = headers, params = params, data = image_data). отклик.Raise_for_status () # Объект «анализ» содержит различные поля, описывающие изображение. Большинство # соответствующий заголовок для изображения получается из свойства ‘description’. анализ = response.json () image_caption = analysis [«описание»] [«captions»] [0] [«текст»]. capitalize () the_statement = «espeak -s165 -p85 -ven + f3 \» Коннор. Я вижу «+ \» «+ image_caption +» \ «—stdout | aplay 2 & gt; / dev / null» os.system (the_statement) #print (image_caption) паучье чувство () СОЗДАЙТЕ ВИДЕО Чтобы увидеть все это вместе, вот наше видео сборки:
Регулировка скорости однофазного асинхронного двигателя
Управление скоростью однофазного асинхронного двигателя с помощью контроллера нечеткой логики.Ключевые слова: SEPIC с двойным входом, косвенное управление, ориентированное на поле, коррекция коэффициента мощности, однофазный асинхронный двигатель. Однофазные асинхронные двигатели широко используются в бытовой технике и промышленном управлении. Эта исследовательская работа представляет собой привод с регулируемой скоростью асинхронного двигателя с использованием частотного управления… Управление скоростью двигателя переменного тока с помощью управления Bluetooth. Мне постоянно задают этот вопрос, занимаясь ремонтом автомобилей. Это правильный и наиболее эффективный способ изменения скорости одно- или многофазного асинхронного двигателя.Вольт — 200/220. Тиристорное управление трехфазными асинхронными двигателями: скорость асинхронного двигателя задается как: Таким образом, скорость асинхронного двигателя с фиксированным числом полюсов зависит от частоты питания f и скольжения s, которое, в свою очередь, зависит от подаваемого напряжения или тока. к мотору. Трансформатор: трансформатор — это статическое устройство, которое используется для повышения или понижения переменного напряжения и работает по принципу взаимной индукции. 1. Эта кривая называется характеристической кривой крутящий момент-скорость.Привет, я хочу контролировать скорость однофазного асинхронного двигателя переменного тока. Я хочу контролировать скорость с помощью обычных регуляторов скорости вентилятора (регуляторов), доступных на рынке. Скорость можно регулировать от 0% до 100% в виде четырех различных скоростей. Рисунок: Схема управления двухскоростным асинхронным двигателем с разделенной фазой, имеющим две основные и две вспомогательные обмотки. Для установки селекторного переключателя на низкую скорость, как показано на рисунке, двигатель можно запустить, нажав кнопку SLOW. Однофазный асинхронный двигатель 2.Увеличение скольжения двигателя приводит к потере увеличенной мощности в роторе. Контролируя входную частоту. Серия KBWC обеспечивает плавное регулирование скорости двигателя для двигателей с экранированными полюсами, с постоянным разделенным конденсатором и универсальных двигателей (переменного / постоянного тока). Регулировка скорости однофазного асинхронного двигателя Регулировка скорости однофазного асинхронного двигателя sham96 (автомобильная промышленность) (OP) 22 июня 20 05:30. Здравствуйте все! Скорость трехфазного асинхронного двигателя можно изменять, изменяя напряжение питания. Однофазный асинхронный двигатель состоит из однофазной обмотки на статоре и клеточной обмотки на роторе.Как мы уже знаем, развиваемый крутящий момент пропорционален квадрату напряжения питания, а скольжение при максимальном крутящем моменте не зависит от напряжения питания. 1 25K 2860 2. В этом методе величина тока основной обмотки и его угол регулируются для управления скоростью двигателя, а также для увеличения пускового момента при всех настройках скорости. Элементы управления обеспечивают бесступенчатую регулировку скорости, что позволяет конечному пользователю выбирать желаемый уровень расхода воздуха. Логично, что чаще следует использовать наименее дорогой двигатель с минимальным обслуживанием.Причина для описания асинхронных двигателей как с постоянной скоростью состоит в том, что обычно эти двигатели имеют постоянную скорость в зависимости от частоты источника питания и… Старший № Фаза 1 — 50 Гц. Если нагрузка упадет до нуля, двигатель будет работать на полной скорости. Трехфазный асинхронный двигатель — это, по сути, двигатель с постоянной скоростью, поэтому контролировать его скорость довольно сложно. № 4 200K 2700 5. Однофазный асинхронный двигатель переменного тока — это бесщеточный двигатель с одной обмоткой статора. ST предлагает современные надежные устройства, такие как симисторы, тиристоры и переключатели переменного тока, позволяющие изменять скорость вращения двигателя. регулируется различными способами, в зависимости от требований к стоимости и производительности конечного приложения.. Двунаправленные приводы. 2 50K 2820 3. Многоскоростной и многоцелевой режим работы обеспечивается регулированием скорости этих двигателей. Импульсы ШИМ генерируются с помощью контроллера Arduino. В пульсирующем поле ротор не вращается по инерции. Название: «УПРАВЛЕНИЕ СКОРОСТЬЮ ОДНОФАЗНОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ», Автор: zareen a.abedin, Название: «УПРАВЛЕНИЕ СКОРОСТЬЮ ОДНОФАЗНОГО ИНДУКЦИОННОГО ДВИГАТЕЛЯ», Длина:… Однофазные асинхронные двигатели очень популярны в бытовой, промышленной и потребительские приложения.Если нагрузка меняется, меняется и скорость. Контроль напряжения статора — это метод, используемый для управления скоростью асинхронного двигателя. Двигатели постоянного тока или двигатели переменного тока с намотанным ротором, вероятно, были наиболее популярными двигателями с регулируемой скоростью или однофазными двигателями PSC или двигателями с экранированными полюсами для более легких приложений. Мне нужна помощь, чтобы узнать, можно ли управлять скоростью небольшого промышленного двигателя с помощью Arduino. Схема регулятора яркости для управления напряжением переменного тока, подаваемого на асинхронный двигатель, и датчик угла поворота с преобразователем сигнала для измерения скорости двигателя использовались для регулирования скорости двигателя.Перед обсуждением асинхронных двигателей важно понимать и знать об асинхронных двигателях. Проще говоря, асинхронные двигатели можно описать как трехфазные, самозапускающиеся двигатели переменного тока с постоянной скоростью. Поскольку в этой схеме крутящий момент как основного, так и вспомогательного двигателей находится в одном направлении, этот метод называется кумулятивно-каскадным. Однофазный асинхронный двигатель несимметричен из-за неодинаковых сопротивлений и индуктивностей основной и вспомогательной обмоток. Статор асинхронного двигателя с расщепленной фазой имеет две обмотки: основная обмотка и s r m r s m r s L L i 2 Технические характеристики двигателя.Без нагрузки нет изменения скорости. Частота однофазного инвертора изменяется с помощью переключателей увеличения и уменьшения. Конструкция однофазного асинхронного двигателя. Лучшие однофазные асинхронные двигатели переменного тока подходят под это описание. Мы можем вывести уравнение из эквивалентной схемы, которое позволяет рассчитать крутящий момент для заданного значения скольжения. [5] О. Оладепо, Г.А. Из приведенного выше выражения скорости основного асинхронного двигателя мы можем сказать, что скорость в каскадном режиме асинхронного двигателя эквивалентна скорости одиночного двигателя, имеющего (P 1 + P 2) полюсов.Л.с. / кВт — 1,5. У меня есть однофазный реверсивный асинхронный двигатель со следующими характеристиками: Модель: 4RK25GK-AUL Номинальная мощность: 20 Вт Номинальное напряжение: 100 В Технические характеристики двигателя указаны ниже Марка / модель: Siemens elmo g 2bh4 100 220 В переменного тока ~ 3,25 А 3210 об / мин 0,36 кВт Табличка однофазного двигателя 60 Гц в прикрепленном файле. Форма выходного сигнала однофазного инвертора показана ниже. Мне нужно отображать число оборотов в минуту также на ЖК-дисплее или в 7-сегментном формате. Двигатель соединен с вентилятором, используемым в сушилке с псевдоожиженным слоем лабораторного масштаба. Может ли кто-нибудь предложить или помочь мне сделать базовую схему.ВВЕДЕНИЕ Характеристики однофазных асинхронных двигателей идентичны характеристикам трехфазных асинхронных двигателей, за исключением того, что однофазный асинхронный двигатель не имеет собственного пускового момента, и для его запуска необходимо принять некоторые специальные меры. Электродвигатель — Электродвигатель — Однофазные асинхронные двигатели: для развития вращающегося поля в асинхронной машине требуется набор токов, смещенных по фазе (как показано на рисунке), протекающих в наборе обмоток статора, смещенных вокруг статора. периферия.Частотно-регулируемый привод (VFD) — это система для управления скоростью вращающегося или линейного электродвигателя переменного тока (AC) путем управления частотой электроэнергии, подаваемой на двигатель. Модель Simulink асинхронного двигателя с расщепленной фазой и однофазного циклоконвертера в однофазный показана на рисунке 3. Это зависит от типа однофазного двигателя. В этой статье представлен новый метод управления скоростью однофазного асинхронного двигателя, позволяющий преодолеть недостатки традиционных методов.Сопротивления оптопары (Ом) Скорость (об / мин) 1. Привет, ребята, у меня есть однофазный асинхронный двигатель мощностью 50 Вт, нужно контролировать его скорость. Проект «Контроллер скорости однофазного двигателя переменного тока» объяснит вам, что именно необходимо для управления реальным устройством с использованием нашего хорошо известного микроконтроллера 8051. 5, номер 2 (2012). Управление скоростью двигателя имеет множество преимуществ, таких как энергоэффективность, снижение слышимого шума и лучший контроль над приложением. [4] Д-р Джамал А. Мохаммед, «Регулирование скорости однофазного асинхронного двигателя с помощью микроконтроллера», ICIAC-12-13 апреля 2014 г.Управление скоростью в трехфазном асинхронном двигателе — MCQ с ответами Q1. Чтобы получить математическую модель двигателя с постоянными параметрами (напряжением, током и магнитным потоком), необходимо преобразовать все переменные в стационарную систему отсчета (d — q), закрепленную на статоре. В этом проекте пользователь может использовать переключатели для управления скоростью двигателя переменного тока, а для отображения текущей скорости предусмотрен светодиодный дисплей. Адегбойега, «Моделирование в MATLAB однофазного контроллера SCR для однофазного асинхронного двигателя», Международный журнал электронной и электротехники, Vol.RPM 1420 / 9A На рисунке 1 показан график зависимости крутящего момента асинхронного двигателя от скорости от нуля до синхронной скорости. Когда к обмотке статора подключен однофазный источник питания, создается пульсирующее магнитное поле. Ключевые слова: асинхронный двигатель, TRIAC, управление скоростью I. Управление скоростью однофазного асинхронного двигателя с помощью контроллера Arduino. Кроме того, управление скоростью однофазного асинхронного двигателя с использованием нечеткого непрямого управления с ориентацией на поле (IFOC) имело повышенную устойчивость к резким изменениям скорости и искажениям момента нагрузки.В этой тиристорной управляемой системе питания это… Двухполупериодная схема управления фазой сводит к минимуму потери мощности, тем самым снижая потребность в энергии. Итак, я подумал: контролировать напряжение с помощью igbt (с цифровым выводом и оптопарой) / симистор считывать частоту вращения с помощью датчика Холла Трехфазный асинхронный двигатель Сегодня, вероятно, используется больше однофазных асинхронных двигателей переменного тока, чем все остальные типы вместе. Аннотация: Однофазные асинхронные двигатели широко используются в бытовой технике и промышленном управлении.Повышение или понижение напряжения может иметь некоторые эффекты регулирования скорости, но они будут небольшими, их трудно контролировать, они будут зависеть от нагрузки, могут вызвать перегрев двигателя и, как правило, не рекомендуются. ВЫВОДЫ Управление скоростью однофазного асинхронного двигателя — это наиболее популярный тип однофазных асинхронных двигателей. Однофазный асинхронный двигатель аналогичен трехфазному асинхронному двигателю с короткозамкнутым ротором, за исключением того, что на статоре установлены однофазные две обмотки (вместо одной трехфазной обмотки в трехфазных двигателях), а ротор с клеточной обмоткой расположен внутри статора, который свободно вращается с помощью установленных на валу двигателя подшипников.Вы либо использовали другой тип двигателя, скорость которого было легче контролировать, либо вы использовали механическое снижение скорости на выходной стороне двигателя. Это относится к трехфазным асинхронным двигателям и однофазным асинхронным двигателям, использующим пусковой / рабочий конденсатор. Обратите внимание, что этот метод управления скоростью работает путем ослабления двигателя, так что нагрузка заставляет двигатель работать с пониженной скоростью.Проф д-р Хаб, Ключ к ответу на документальный фильм «Социальная дилемма», Идентификационные тесты Kocuria Rosea, Ryobi P318 не работает, Полиция Trade-in Ruger Lcp, Квакерский попугай против солнца Conure, Quizlet лаборатории мышечной ткани, Задержка ввода Minecraft, Колесо генератора персонажей Наруто, Карибские курорты на продажу, Список тюрем округа Вашингтон, штат Айдахо,
Патент США на прерывистое управление низкой скоростью для электроприводов. Патент (Патент № 4568193, выданный 4 февраля 1986 г.)
Уровень техникиВ данной области техники хорошо известно использование электроприводов для различных задач, связанных с приготовлением пищи, включая нарезку, измельчение, смешивание, замешивание, измельчение и тому подобное.Одной из проблем, связанных с использованием таких устройств, была сложность, особенно с устройствами, приспособленными для смешивания и замешивания, с поддержанием постоянной скорости перемешивания или замешивания смесительных или замешивающих элементов при изменении нагрузки на устройство.
Проблеме был найден ряд решений. Один из них заключался в использовании различных систем управления скоростью с обратной связью, в некоторых из которых в качестве датчика скорости использовался механический регулятор, который контролировал угол включения симистора, например, раскрытый в U.С. Пат. № 4227128, Cockroft et al. Другой подход заключался в использовании полностью электронного управления скоростью, в котором использовался магнитный тахометр для измерения скорости вращения колеса прерывателя, механически соединенного с двигателем, и который управлял углом включения симистора, подключенного к двигателю, как описано в патенте США No. . № 4326153, Contri.
Несмотря на преимущества, которые явно вытекали из этих систем управления скоростью предшествующего уровня техники, все еще оставались проблемы при использовании таких систем.Основная проблема заключалась в том, что такая система использовалась с устройством для смешивания, таким как электрический миксер для пищевых продуктов типа, описанного в патенте США No. № 4277181, Stahly et al. добавления порошков или жидких ингредиентов в смесительную чашу, когда смесительное устройство работало в соответствии с предписаниями рецепта. Пользователи часто обнаруживали, что когда порошки, в частности, добавлялись в миксерную чашу, они имели тенденцию выдыхаться или выбрасываться из чаши взбивателями, что приводило к потере предварительно отмеренных ингредиентов, что могло повлиять на характеристики продукта. смешиваются, а также приводят к возможности того, что часть выброшенного порошка в виде переносимой по воздуху формы может быть втянут через охлаждающие отверстия в смесителе, в конечном итоге скапливаясь в смесителе и повреждая смеситель.Аналогичные проблемы возникали при добавлении различных жидкостей, которые могли выплескиваться из миксерной чаши из-за быстрого вращения взбивателей в соответствии с инструкциями по рецепту.
Одним из возможных решений этой проблемы может быть ручная регулировка миксера на более низкую скорость, пока порошки и жидкость вводятся в чашу. Однако возникает проблема, заключающаяся в том, что пользователи часто забывают вернуть смеситель на желаемую скорость перемешивания после того, как были введены порошки или жидкость.Это может привести к повреждению смесителя из-за того, что продолжительная работа смесителей с универсальными двигателями на низкой скорости при относительно высоких нагрузках по крутящему моменту может вызвать перегрев и повреждение двигателя.
Что необходимо, так это устройство для приготовления пищи или смешивания, имеющее возможность временно снижать свою скорость, чтобы позволить вводить порошки или жидкости в смесительную чашу без последующего выброса их из нее, а затем иметь возможность автоматически вернуться к предварительно выбранному желаемому состоянию. скорость перемешивания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯЗдесь раскрыто устройство для приготовления пищи, которое включает в себя корпус и электродвигатель, установленный внутри корпуса. Электродвигатель приспособлен для подключения к подходящему источнику переменного тока для подачи энергии. Электродвигатель соединен с приводом со шпинделем, который может принимать приспособление для обработки пищевых продуктов в соединении с приводом, при этом приспособление для обработки пищевых продуктов приспособлено для выполнения механических операций с пищевым продуктом, таких как смешивание или замешивание.Магнитный тахометр определяет скорость вращения электродвигателя и генерирует сигнал датчика скорости, который подается на преобразователь частоты в напряжение. Преобразователь частоты в напряжение подключил к нему схему снижения скорости, включая таймер, который приспособлен для подключения дополнительной емкости параллельно с емкостью преобразователя, которая подключена к преобразователю частоты в напряжение, чтобы изменять соотношение между частотой датчика скорости. сигнал и выходное напряжение преобразователя, чтобы тем самым снизить скорость двигателя, в то время как конденсатор снижения скорости эффективно подключен параллельно.
Усилитель ошибки подключен к преобразователю частоты в напряжение для приема от него сигнала индикации скорости и для создания сигнала ошибки, пропорционального разнице между сигналом индикации скорости и сигналом заданного значения. Выходная схема симистора подключена к усилителю ошибки и принимает мощность переменного тока, поток которой регулируется выходной схемой симистора через электродвигатель в ответ на сигналы от усилителя ошибки.
Основная цель настоящего изобретения состоит в том, чтобы предоставить устройство для приготовления пищи, имеющее регулятор скорости, включающее в себя средство для временного снижения скорости устройства на предварительно выбранный коэффициент, чтобы позволить вводить пищевые продукты для смешивания.
Другим возражением настоящего изобретения является создание устройства для приготовления пищи, адаптированного для временной работы на пониженной скорости в течение достаточно короткого времени, чтобы предотвратить перегрев устройства, и включающего средства для автоматического возврата устройства на более высокую скорость обработки по истечении указанный интервал таймера.
Другие цели настоящего изобретения станут очевидными для специалистов в данной области после прочтения описания и формулы изобретения в свете сопроводительных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙРИС. 1 представляет собой вид в перспективе устройства для приготовления пищи, в частности миксера для пищевых продуктов, в соответствии с настоящим изобретением;
РИС. 2 — вид в разрезе части подставки для прибора, показанной на фиг. 1, взятый в целом по линии 2-2 на фиг. 5, на котором показаны детали соединений между переключателем мгновенного действия и платой управления скоростью;
РИС. 3 — блок-схема схемы управления скоростью по фиг.2;
РИС. 4 — схематическая диаграмма цепи управления скоростью по фиг. 3; и
РИС. 5 — частичный вид сбоку стойки миксера для пищевых продуктов и задней части головки миксера для пищевых продуктов с отдельными частями, показывающими детали расположения печатной платы, переключателя мгновенного действия и барабана с ручным приводом для выбора заданной скорости миксер.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯТеперь обратимся к чертежам, и особенно к ФИГ.1 устройство для приготовления пищи с электроприводом, как правило, обозначено на нем цифрой 10. Устройство 10 для приготовления пищи с электроприводом, в частности миксер для пищевых продуктов, включает подставку 11 и смесительную головку 12. Стенд 11 включает в себя основание 13 и полость пьедестал 14. Пара съемных взбивателей 15 с приводом соединена с электродвигателем способом, хорошо известным в данной области техники. Взбиватели 15 установлены внутри чаши 16 для работы со съедобными или пищевыми продуктами.
Схема 20 управления двигателем с обратной связью установлена внутри полого постамента 14, как лучше всего видно на фиг.2 и 5. Схема 20 управления двигателем с обратной связью, как можно видеть на фиг. 3 и 4, имеет источник питания 22, подключенный для приема переменного тока с линейным напряжением и частотой от шнура питания 23. Переменный ток преобразуется в регулируемый постоянный потенциал источником 22 питания 22. Он полуволновой выпрямляется диодом. 24.
Чтобы снизить полуволновое выпрямленное напряжение до уровня, пригодного для использования другими частями схемы 20 управления скоростью, резистор 25 и стабилитрон 26 соединены последовательно с диодом 24.Фильтрация ослабленного полуволнового выпрямленного напряжения осуществляется электролитическим конденсатором 27, подключенным к стыку резистора 25 и стабилитрона 26. Схема 20 управления скоростью отключается и включается однополюсным переключателем 30, подключенным к одному ходу. к сетевому шнуру 23. Лампа 31, также подключенная к линейному шнуру 23, горит, указывая на подачу питания.
Универсальный двигатель 32, имеющий якорь 34 и катушки возбуждения 36 и 37, соединенные последовательно с ним, электрически соединен с диодом 24 и переключателем 30 для получения электроэнергии от сетевого шнура 23.Универсальный двигатель 32 может работать как от переменного, так и от постоянного тока. Поток мощности через универсальный двигатель 32 управляется последовательно включенным симистором 40. Симистор 40 также подключен к переключателю 30 и, в конечном итоге, к сетевому шнуру 23. Когда переключатель 30 замкнут, поток мощности через универсальный двигатель 32 управляется исключительно симистором 40.
Для управления переключением симистора 40 используется средство измерения скорости, содержащее преобразователь частоты в напряжение и усилитель ошибки.Положительный потенциал 22 В генерируется стабилитроном 26 на выходном выводе 41, подключенном к нему, и подается в сеть 42 резисторов, содержащую первый фиксированный резистор 44, подключенный к выводу 41. Второй фиксированный резистор 46 подключен последовательно с первый постоянный резистор 44. Потенциометр 48 соединен последовательно с постоянным резистором 46. Потенциометр 48 включает в себя рычаг 50 развертки. Постоянный резистор 52 соединен последовательно с потенциометром 48. Переменный резистор 54 подключен между постоянным резистором. 52 и земля.Переменный резистор 54 имеет рычаг 55 развертки, также подключенный к земле. Регулировка рычага 55 развертки изменяет падение потенциала на резисторах 44, 46, 48 и 52.
Для подачи сигнала обратной связи, указывающего скорость вращения универсального двигателя 32, в схему 20 управления двигателем, 24-зубчатое колесо 58 прерывателя, состоящее из ферромагнитного материала, соединено с приводом с якорем 34 универсального двигателя 32. . Датчик 60 магнитного сопротивления расположен в непосредственной близости от зубьев колеса 58 прерывателя, так что при вращении двигателя 32 колесо 58 прерывателя, изменяя сопротивление магнитного датчика 60, генерирует квазисинусоидальный сигнал в магнитном поле. обмотки датчика, как хорошо известно в данной области техники.Резистор 62 и конденсатор 64 последовательно подключены между магнитным датчиком 60 и землей для фильтрации высокочастотных нежелательных переходных процессов на землю.
Для преобразования частоты сигнала магнитного датчика в типичное напряжение, которое линейно связано со скоростью колеса 58 прерывателя, заявители используют преобразователь 65 частоты в напряжение, содержащий хорошо известную, коммерчески доступную интегральную схему, предназначенную для с этой целью и продается Национальной полупроводниковой компанией.В данном случае схема представляет собой LM2917N-8 и упакована в корпус с восемью контактами, пронумерованных National Semiconductor с 1 по 8 соответственно. В данном документе эти контакты также имеют номера 66, 68, 70, 72, 74, 76, 78 и 80.
Синусоидальный сигнал от датчика сопротивления 60 подается на вывод 66, который питает неинвертирующий вывод 82 операционного усилителя 84. Операционный усилитель 84 имеет инвертирующий вывод 85, подключенный как к внутреннему заземлению, так и к внешнему заземлению на выходе. штифт 80.Операционный усилитель 84 работает как компаратор и вырабатывает сигнал прямоугольной волны на выходе 86. Сигнал прямоугольной волны имеет частоту, равную частоте сигнала, подаваемого датчиком магнитного сопротивления 60. Прямоугольная волна подается на Зарядный насос 88, который подключен через контакт 68 к заземленному конденсатору 90, который выбирает отношение частоты входного сигнала от магнитного датчика 60 к амплитуде выходного сигнала от преобразователя частоты в напряжение.Второй выход 70 накачки заряда 88 подключен к неинвертирующему выводу 94 операционного усилителя 96. Операционный усилитель 96 также выполнен в виде дифференциального усилителя и имеет резистор 98, подключенный через вывод 78 к инвертирующему выводу 100. резистор 98 также подключен к рычагу 50 потенциометра 48 для получения от него сигнала заданного значения. Неинвертирующий входной вывод 100 операционного усилителя 96 также подключен к выводу 70, который последовательно соединен с резистором 104 и регулируемым резистором 106 регулировки скорости.Регулируемый резистор 106 регулировки скорости также соединен с землей. Ток, подаваемый зарядовой накачкой 88, генерирует напряжение на резисторах 104 и 106, которое измеряется входной клеммой 94 операционного усилителя 96. Операционный усилитель 96 функционирует как усилитель ошибки. Фильтрующий конденсатор 108 подключен параллельно резисторам 104 и 106 к земле, чтобы удалить часть составляющей переменного тока из квазисинусоидального сигнала, создаваемого датчиком 60 магнитного сопротивления.
Зарядный насос 88 заряжает конденсатор 90 от регулируемого напряжения, подаваемого на контакт 74. Стабилитрон 110 подает постоянное напряжение на зарядный насос 88.
Пользователь может управлять скоростью электродвигателя 32, выбирая настройку подметального рычага 50 обычным способом. Подметальный рычаг 50 механически соединен с вращающимся барабаном 111 выбора скорости, установленным на задней части смесительной головки 12. Выбранное положение подметального рычага дает регулируемое опорное или заданное напряжение, которое подается на входной инвертирующий вывод 100 усилителя ошибки. 96.Напряжение скорости постоянного тока, подаваемое на инвертирующий вывод 94, складывается с величиной, обратной выбранному пользователем опорному напряжению на выводе 100, и выходной сигнал ошибки подается на транзистор 112 на его базе 114. Транзистор 112 имеет эмиттер 116, подключенный к контакт 72 для вывода напряжения, линейно пропорционального разности между потенциалом сигнала скорости постоянного тока и выбранным пользователем опорным или заданным потенциалом. Коллектор 117 транзистора 112 подключен к контактам 74 и 76.
Опорное напряжение, снимаемое рычагом 50 развертки, подается через резистор 98, в данном случае резистор 47 кОм, на вывод 100. Резистор 120 находится в цепи обратной связи между выводом 100 и эмиттером 116. резистор 120 имеет сопротивление 10 МОм. Резистор 122 подключен между резистором 120 и землей. Конденсатор 124, имеющий емкость 0,0015 мкФ, подключен параллельно резистору 120. Последовательная резистивно-емкостная цепь, состоящая из неполярного электролитического конденсатора 126, имеющего емкость 0.47 мкФ, и резистор 128, имеющий сопротивление 470 кОм, подключен параллельно резистору 120. Резистор 120, конденсаторы 124 и 126 и резистор 128 составляют цепь 129 обратной связи между эмиттером 116 и выводом 100.
Как хорошо известно специалистам в данной области техники, схема 129 обратной связи обеспечивает два диапазона усиления через усилитель 96 ошибки. Когда универсальный двигатель 32 работает со скоростью, близкой к его желаемой рабочей скорости, полное сопротивление через конденсатор 126 относительно высок, в результате чего общий импеданс контура обратной связи составляет около 10 МОм, установленный резистором 120.Конденсатор 124 действует как интегрирующий конденсатор, чтобы удалить любую оставшуюся пульсацию из сигнала ошибки.
Поскольку настоящее изобретение должно использоваться в приборе, в котором двигатель может быть запущен внезапно, относительно высокий коэффициент усиления через усилитель 96 ошибки, установленный контуром обратной связи для резистора 120, должен быть минимизирован при запуске, чтобы обеспечить большую стабильность схемы. Это достигается за счет параллельного контура обратной связи конденсатора 126 и резистора 128. Поскольку универсальный двигатель 32 при запуске, по сути, подает сигнал ступенчатой функции на усилитель 96 ошибки, быстро меняющийся сигнал встречает обратную связь с относительно низким импедансом. переход к конденсатору 126 и резистору 128.Тракт с низким импедансом существенно снижает коэффициент усиления усилителя 96 ошибки, чтобы сделать схему более стабильной, когда скорость двигателя быстро изменяется.
Добавление слишком большой емкости в любой точке схемы усилителя ошибки приводит к увеличению времени отклика схемы или, по сути, к замедлению работы схемы. Чтобы обеспечить адекватную фильтрацию при сохранении надлежащего времени отклика, часть оставшейся составляющей переменного тока из квазисинусоидального сигнала, создаваемого сигналом 60 считывания магнитного сопротивления, удаляется конденсатором 108, в то время как дополнительная фильтрация выполняется интегрирующим конденсатором. 124.
Для того, чтобы позволить пользователю временно снизить скорость универсального двигателя 32, не влияя на настройку потенциометра 48 выбора скорости, предусмотрена схема 130 снижения скорости. Схема 130 снижения скорости включает в себя провод 131, соединенный с проводом 41. Однополюсный однополюсный переключатель 132 с мгновенным контактом подключен к проводу 131 для получения от него положительного потенциала 22 В. Диод 133 подключен к переключателю 132 по причинам, которые станут очевидными ниже.Электролитический конденсатор 134 соединен с диодом 133 и землей. Первый резистор 135 и второй резистор 136 соединены как делитель напряжения. Транзистор 137, имеющий базу 138, подключен к соединению резисторов 135 и 136 деления напряжения на базе 138. Транзистор 137 также имеет эмиттер 139, подключенный к земле, и коллектор 140, подключенный к конденсатору 141. Конденсатор 141 подключен к выводу 68 и имеет то же значение, что и конденсатор 90.
Когда пользователь желает снизить скорость миксера 10, например, чтобы разрешить добавление ингредиентов в миксерную чашу 16 при вращении взбивателей 15, мгновенный контактный переключатель 132 замыкается и отпускается.Как только переключатель 132 замыкается, конденсатор 134 быстро заряжается и переводит транзистор 137 из состояния отключения в состояние насыщения, в этот момент пластина конденсатора 141, подключенного к коллектору 140, опускается почти до потенциала земли, таким образом эффективно соединяя конденсатор 141 параллельно с конденсатором 90. Таким образом, два конденсатора удваивают емкость, подключенную к выводу 68, что удваивает величину выходного сигнала индикации скорости, подаваемого на неинвертирующий вывод 94 усилителя 96 ошибки.Это снизит скорость универсального двигателя 32 до половины скорости, выбранной первоначально потенциометром 48 выбора скорости. После того, как конденсатор 134 заряжен и транзистор 137 перейдет в режим насыщения, заряд начинает утечку конденсатора 134, как через резисторы. 135 и 136 и через резистор 135 и путь база-эмиттер транзистора 137. Пониженная скорость двигателя 32 остается постоянной до тех пор, пока напряжение на конденсаторе 134 не упадет до точки, в которой транзистор 137 выходит из состояния насыщения и переходит в активный область.В этот момент напряжение на переходе коллектор-эмиттер транзистора 137 начинает увеличиваться, в результате чего скорость двигателя 32 начинает линейно увеличиваться до полной скорости. Транзистор 137 затем отключается, когда конденсатор 134 полностью разряжается, в результате чего двигатель 32 возвращается к своей полной заданной скорости. Общее время для пониженной скорости в данном варианте осуществления было выбрано равным 90 секундам. Интервал линейного изменения, в течение которого транзистор 137 находится в активной области, составляет приблизительно от 10 до 15 секунд.Таким образом, у пользователя есть широкие возможности для добавления ингредиентов, и двигатель 32 затем быстро возвращается к нормальной скорости без выброса ингредиентов из чаши 16 и без эксплуатации двигателя 32 при больших нагрузках, которые могут вызвать его перегрев. В случае, если пользователь желает сократить предварительно выбранный интервал времени, он может разомкнуть переключатель 30, что приведет к быстрой разрядке конденсатора 134 через диод 133. Когда переключатель 130 повторно замкнут, транзистор 137 будет отключен, и двигатель 32 возобновит работу. его нормальная заданная скорость.
Чтобы обеспечить точную синхронизацию точки, в которой симистор 40 переключается на проводимость, чтобы позволить электроэнергии течь через универсальный двигатель 32, предусмотрен датчик 142 перехода через нуль. Поскольку мощность, которую получает двигатель, зависит от точки в цикле переменного тока, в которой симистор 40 включается для каждого полупериода переменного тока в линии, детектор перехода через ноль измеряет характеристики переменного тока в линии, так что сигнал переключения будут правильно синхронизированы с нулевой точкой пересечения.Электропитание переменного тока со среднеквадратичным значением 120 В подается на входной вывод 143 детектора 142 перехода через нуль. Чтобы позволить твердотельным электронным компонентам выполнять необходимые функции синхронизации и измерения, сигнал линии питания переменного тока ослабляется в 1 и 12 раз. через резистор 144, подключенный к входному выводу 143. Пики, переходные процессы или другие сигналы, имеющие частоту выше, чем базовая частота линии электропередачи, проводятся на землю через конденсатор 145. Таким образом, сигнал, имеющий форму волны, идентичную и в фаза с сигналом линии электропередачи, но имеющая размах напряжения около 15 вольт, присутствует на стыке резистора 144 и конденсатора 145.
К ослабленному сигналу переменного тока необходимо добавить напряжение постоянного тока, чтобы сместить уровень сигнала переменного тока в достаточной степени, чтобы ни одна часть сигнала со смещенным уровнем сигнала не была ниже нуля вольт. Это достигается путем подключения резистивной цепи 146 к выходу регулируемого источника питания для получения от него положительного напряжения 22 вольт. Схема 146 сопротивлений состоит из множества резисторов, пронумерованных соответственно 147, 148, 149 и 150, подключенных между проводом 41 источника питания и землей. Значения сопротивления были выбраны таким образом, чтобы потенциал постоянного тока на стыке резисторов 147 и 148 был около 11.32 вольта, а потенциал постоянного тока на стыке резисторов 148 и 149 составляет около 11 вольт. Потенциал постоянного тока на переходе между резисторами 149 и 150 составляет около 10,68 вольт. Резистор 151 и конденсатор 152 включены последовательно между соответствующими соединениями резисторов 148 и 149, резистора 144 и конденсатора 145. Соединение резисторов 148, 149 и 151 фактически является точкой заземления переменного тока. Таким образом, ослабленный сигнал переменного тока и сигнал постоянного тока 11 В складываются вместе, так что сигнал переменного тока со смещенным уровнем изменяется в пределах +3.На соединениях резистора 151 и конденсатора 152 присутствует напряжение 5 и +18,5 вольт и синфазно с линией питания. Напряжение со сдвигом уровня подается на пару компараторов, соответственно пронумерованных 153 и 154 и имеющих соответствующий неинвертирующий вход. клеммы 156 и 158. В настоящем варианте осуществления компараторы 153 и 154 представляют собой операционные усилители LM 339 компании National Semiconductor Company. Компаратор 153 также принимает на инвертирующем выводе 160 напряжение постоянного тока 10,68 от соединения резисторов 149 и 150.Аналогичным образом, компаратор 154 получает потенциал постоянного тока 11,32 В на инвертирующем выводе 162 через резистор 164, подключенный к соединению резисторов 147 и 148. Электролитический конденсатор 166 подключен между соединением резисторов 147 и 148 и землей для проведения любые высокочастотные компоненты переменного тока от источника 22 питания и входной клеммы 143, присутствующие в сети 146 делителя напряжения вдали от компараторов 153 и 154.
Для того, чтобы генерировать синхронизирующий сигнал в течение всего цикла переменного тока, необходимо, чтобы один из компараторов обрабатывал отрицательную часть переменного напряжения, а другой — положительную часть.Выходной вывод 170 конденсатора 154 остается в заземленном состоянии из-за его конфигурации с открытым коллектором до тех пор, пока напряжение переменного тока со смещенным уровнем не превысит 11,32 вольт. В этот момент выходной контакт 170 переключается в состояние блокировки, позволяя заряжать генератор 171 пилообразной синхронизации, имеющий конденсатор 172, через резистор 174, который подключен для приема положительного регулируемого потенциала 11,32 В от соединения резисторы 147 и 148.
Постоянная времени конденсатора 172 и резистора 174 выбрана таким образом, чтобы в течение интервала, в течение которого выходной вывод 170 остается блокирующим, конденсатор 172 заряжается линейно, обеспечивая линейное изменение напряжения, имеющее линейную зависимость от времени.Линейное напряжение имеет минимум ноль вольт, когда конденсатор 172 начинает заряжаться, и максимум около четырех вольт, которые достигаются в то же самое время, когда смещенный по уровню потенциал переменного тока падает ниже 11,32 вольт. Когда потенциал переменного тока со смещенным уровнем составляет от 10,68 до 11,32 В, выходной вывод 170 конденсатора 154 подключается к земле, что приводит к быстрой разрядке конденсатора 172. Как только напряжение со смещенным уровнем падает ниже 10,68 В, выходной контакт 180 компаратора 152 заземлен, в результате чего неинвертирующая входная клемма 162 компаратора 154 становится заземленной, снова переключает выходную клемму 170 на блокировку и позволяет конденсатору 172 заряжаться.
Таким образом, выходной вывод 170 детектора 142 перехода через нуль остается в состоянии блокировки почти все время, за исключением короткого периода при переходе через ноль переменным током, когда выходной вывод 170 заземлен. Это позволяет конденсатору 172 и резистору 174 генератора 171 пилообразного синхроимпульса заряжаться и разряжаться для создания потенциала пилообразной волны на выходном выводе 182. Частота пилообразной волны в два раза превышает линейную частоту переменного тока, и он синхронизирован. вместе с тем.Пилообразная волна обеспечивает линейный и очень точный опорный сигнал синхронизации.
Чтобы выбрать угол проводимости симистора 40, необходимо обработать как опорный сигнал пилообразной синхронизации, так и сигнал ошибки. Сигнал ошибки подается на выходной компаратор 199, состоящий из пары компараторов операционных усилителей National Semiconductor LM 339, соответственно пронумерованных 200 и 202, и имеющих соответствующие инвертирующие входные клеммы 204 и 206. Опорный пилообразный сигнал синхронизации подается на компараторы 200. и 202 на паре соответствующих неинвертирующих входных клемм 208 и 210.Пара выходных клемм 212 и 214, соответственно, компараторов 200 и 202, подключена к резистору 216, который принимает положительный опорный сигнал 22 В от провода 41 регулируемого источника питания 22. Компараторы 200 и 202 идентичны компараторы 153 и 154.
Другими словами, пока потенциал на инвертирующей входной клемме меньше, чем потенциал на неинвертирующей входной клемме, выходной контакт будет оставаться в состоянии блокировки. Это условие с двумя состояниями используется для управления или направления триггерного сигнала на симистор 40.В точке во время каждого полупериода переменного тока, в которой опорный сигнал синхронизации превышает сигнал усилителя ошибки, выходные клеммы 212 и 214 компаратора переключаются в состояние блокировки, тем самым подавая триггерный сигнал постоянного тока на диод 218 через резистор 220 и на затвор 222 симистора 40. Симистор 40 затем переключает проводку для подачи электрического тока на универсальный двигатель 32. Резистор 223 подключен к соединению резистора 220 и затвора 222 и заземления, чтобы предотвратить ложное срабатывание симистора 40. .
Сигнал запуска постоянного тока особенно желателен, поскольку прерывание тока двигателя, вызванное отскоком щетки, не приведет к переключению симистора 40 в непроводящее состояние, как это могло бы происходить в схемах предшествующего уровня техники, которые подают импульсные сигналы запуска на затворы симистора.
Поскольку сигнал усилителя ошибки пропорционален количеству мощности, которую электродвигатель 32 должен потреблять для работы на выбранной скорости, и поскольку амплитуда сигнала синхронизации также по существу линейна по времени, комбинация двух сигналов обеспечивает очень точную синхронизацию точки переключения симистора 40.Демпферная сеть, состоящая из конденсатора 224 и пары параллельных резисторов 226 и 228, подключена от первого главного вывода 230 симистора 40 к земле для защиты симистора 40 во время переключения от повреждений из-за индуктивной нагрузки электродвигателя 32. Второй главный вывод 232 симистора 40 также соединен с землей для возврата на землю.
Настоящее изобретение не только обеспечивает высокоточное управление скоростью электродвигателя устройства для приготовления пищи, но также обеспечивает средство, с помощью которого пользователь устройства может быстро и легко автоматически снижать скорость электродвигателя на предварительно заданное время в для того, чтобы легко добавлять ингредиенты в миксерную чашу, чтобы ингредиенты не вылетали из чаши или не брызгали на пользователя.Кроме того, мгновенное управление снижает вероятность выхода из строя устройства из-за того, что легкие смешивающие порошки, такие как мука, могут попасть в вентиляционные отверстия смесительной головки и вызвать повреждение двигателя. Кроме того, настоящее изобретение обеспечивает средство для снижения скорости смесительного устройства на относительно короткий промежуток времени, чтобы можно было добавлять ингредиенты в дежу и затем автоматически возвращать устройство к заданной скорости до того, как электродвигатель, приводящий устройство в действие, будет повреждены из-за перегрева при работе на малых оборотах при больших нагрузках.
Хотя был показан и описан единственный вариант осуществления настоящего изобретения, следует понимать, что изменения и модификации могут быть внесены в изобретение специалистами в данной области техники, и поэтому в прилагаемой формуле изобретения предполагается, что оно охватывает все такие изменения и модификации соответствуют истинному духу и объему настоящего изобретения.
СИСТЕМА УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИГАТЕЛЯ — MINARIK ELECTRIC CO.
Различные особенности схемы используются для обеспечения плавного регулирования переменного напряжения в диапазоне низких скоростей двигателя; для выборочного изменения величины регенеративной обратной связи, которая присуща схеме настоящего изобретения при использовании с определенными типами двигателей; для стабилизации схемы от изменений сетевого напряжения; и для создания регенеративного действия обратной связи через контур цепи, специально предназначенный для этой цели.Цель приведенного выше реферата состоит в том, чтобы предоставить нелегальное техническое заявление о раскрытии содержания настоящей патентной заявки и, таким образом, служить инструментом поиска и сканирования для ученых, инженеров и исследователей. Соответственно, этот реферат не предназначен для использования в понимании или ином понимании принципов настоящего изобретения, подробно описанных ниже, а также не предназначен для использования в интерпретации или каким-либо образом ограничивая объем или справедливое значение прилагаемой формулы изобретения. .
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В течение последних нескольких лет стало хорошо известно использование симистора для управления цепью источника питания, работающей на двухполупериодном переменном токе, при этом симистор срабатывает в течение каждой половины цикла. контролируется диаком. В свою очередь, выход из строя диакритического усилителя происходит за счет заряда, накопленного на синхронизирующем конденсаторе, который является частью RC-цепи, подключенной, как правило, параллельно с симистором. В этой хорошо известной базовой схеме срабатывание диака и, следовательно, симистора управляется в ответ на управляющий сигнал, возникающий как функция либо линейного напряжения, либо напряжения, возникающего на симисторе.
В соответствии с настоящим изобретением симисторные схемы применяются для управления скоростью двигателя. Электродвигатели имеют много применений, в которых механическая нагрузка на двигатель может изменяться, но желательно поддерживать постоянную скорость двигателя. Такой электродвигатель может быть, например, электродвигателем постоянного тока либо с постоянным магнитом, либо с возбужденным полем, либо электродвигателем переменного тока с экранированным полюсом или отталкивающим типом. Если напряжение просто поддерживается при увеличении нагрузки двигателя, результатом является падение скорости двигателя, и для поддержания постоянной скорости необходимо фактически увеличивать напряжение, подаваемое на двигатель.
В соответствии с настоящим изобретением управляющий сигнал создается как функция напряжения, возникающего на линии питания или на симисторе, с использованием RC-цепи, которая заряжается сначала в одном направлении, а затем в другом, и этот управляющий сигнал хранится на синхронизирующем конденсаторе и применяется к диактерии по существу таким же образом, как это было известно ранее. Существует также дополнительная схема, которая вырабатывает регенеративный сигнал обратной связи, который комбинируется с традиционным управляющим сигналом, так что точный момент времени в каждом полупериоде, когда срабатывает симистор, определяется как составная функция двух сигналов.Таким образом достигается более точный контроль скорости двигателя, поскольку механическая нагрузка на двигатель изменяется.
Таким образом, основная цель и цель настоящего изобретения — предоставить новые симисторные схемы, которые могут быть успешно использованы в качестве регуляторов скорости двигателя.
Другой целью изобретения является создание новых схем симистора для управления напряжением, которые могут использоваться для любого желаемого приложения с любым желаемым типом нагрузки.
Настоящее изобретение является усовершенствованием по сравнению с раскрытым в одновременно рассматриваемой заявке сер.№ 7740 подана 2 февраля 1970 г. и переуступлена тому же правопреемнику, что и настоящая заявка.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
РИС. 1 — схематическая диаграмма одного из вариантов схемы управления скоростью двигателя в соответствии с настоящим изобретением;
РИС. 2 — схематическая диаграмма другой формы схемы управления скоростью двигателя в соответствии с настоящим изобретением;
РИС. 3 — схематическая диаграмма третьей формы цепи управления скоростью в соответствии с настоящим изобретением; и
ФИГ.4 представляет собой диаграмму формы волны, иллюстрирующую действие изобретения.
ОБЩАЯ ЭКСПЛУАТАЦИЯ
Цепи управления по настоящему изобретению имеют некоторые общие особенности, которые также содержатся в «схемах питания с симисторным управлением», которые описаны и заявлены в совместно рассматриваемой заявке Ser. №7740 поданная 02-02-70. Теперь будут описаны эти общие особенности конструкции и работы.
Регулятор скорости двигателя предпочтительно содержится в одном корпусе и включает в себя клеммы L1 и L2, адаптированные для подключения к источнику переменного напряжения, клеммы, такие как 13, 14, для подключения к якорю двигателя A, который служит нагрузкой, и потенциометр P1 установки скорости, имеющий ручную регулировку.Напряжение внешнего источника питания обычно составляет 115 В при 60 Гц. Подобная компоновка регулятора скорости двигателя в настоящее время хорошо известна в данной области техники.
Внутренняя схема контроллера включает в себя мостовой выпрямитель, обозначенный как «мост», и симистор, обозначенный как симистор, которые соединены в цепь последовательного контура с источником переменного напряжения питания, а также с нагрузкой двигателя. Мостовой выпрямитель имеет входные клеммы 11,12 и выходные клеммы 13,14. Симистор имеет основные токовые клеммы 16,17 и управляющий вентиль 18.Входные клеммы 11,12 мостового выпрямителя соединены последовательно с клеммами 16, 17 основного тока симистора между клеммами L1 и L2 линии питания. Выходные клеммы 13,14 мостовой схемы подключены к якорю А двигателя с помощью разъемных соединений, специально не показанных на настоящих чертежах.
Назначение схемы мостового выпрямителя — обеспечить двухполупериодное выпрямление сетевого тока, так что пульсирующий однонаправленный ток может подаваться на якорь двигателя A.Функция симистора заключается в том, чтобы действовать как запорный клапан на обеих половинах цикла тока, препятствуя прохождению тока через мостовой выпрямитель и якорь двигателя в течение начальной части каждого полупериода приложенной волны напряжения. но позволяя току течь во второй части каждого полупериода. Момент времени в течение каждого полупериода, в котором симистор может стать проводящим, регулируется таким образом, чтобы достичь как можно более точного управления скоростью двигателя.
Diac с электродами 21,22 используется для приведения симистора в состояние проводимости, а временный конденсатор Ct используется для приведения Diac к его напряжению отключения. Электрод 22 Diac подключен к управляющему затвору 18 симистора. Конденсатор времени Ct подключен между клеммой 17 основного тока симистора и электродом 21 Diac, который может называться входным электродом. Другая схема управления используется для управления зарядом на синхронизирующем конденсаторе Ct, и это та другая схема управления, которая является предметом настоящего изобретения, как раскрыто здесь.
Схема согласно настоящему изобретению в каждой из своих форм также включает в себя фильтрующий конденсатор C3, который подключается непосредственно между выводами L1 и L2 питания. Конденсатор C3 предназначен для фильтрации паразитных импульсов напряжения, которые могут присутствовать в линии питания, и предотвращения их повреждения внутренней схемой регулятора скорости.
Каждая форма схемы по настоящему изобретению также включает в себя резистор R6, подключенный последовательно с конденсатором C2, причем последовательная комбинация подключается между клеммами 16 и 17 основного тока симистора.Цепь байпаса, обеспечиваемая R6 и C2, обычно известна как цепь dV / dt и используется для предотвращения ложного срабатывания симистора. Мостовой выпрямитель работает таким образом, чтобы выпрямлять последовательные полупериоды напряжения питания и достигать якоря двигателя с одинаковой полярностью. Однако симистор и диод получают не выпрямленное напряжение питания, состоящее из попеременно положительных и отрицательных полуволн. После инициирования каждого нового полупериода напряжения питания синхронизирующий конденсатор Ct заряжается (с соответствующей полярностью заряда) до напряжения отключения Diac, составляющего приблизительно 32 вольта.Затем срабатывание Diac инициирует проводимость симистора, который проводит ток до конца этого полупериода. Скорость зарядки конденсатора Ct и, следовательно, точное время срабатывания Diac определяется схемой управления, которая является предметом настоящего изобретения.
В схеме на фиг. 1 потенциометр установки скорости обозначен как P1, а в схемах фиг. 2 и 3 потенциометр установки скорости обозначен как P3. Потенциометр установки скорости приводится в действие вручную, чтобы выбрать напряжение, подаваемое на нагрузку, и тем самым выбрать нормальную рабочую скорость двигателя.После выбора рабочей скорости двигателя функция и цель контроллера двигателя — поддерживать эту рабочую скорость, несмотря на изменения как механической нагрузки на двигатель, так и напряжения питающей сети.
ПОДРОБНОЕ ОПИСАНИЕ — РИСУНОК 2
В схеме на фиг. 2 потенциометр P3 установки скорости подключен между клеммой L1 питания и входным электродом 21 Diac. Таким образом, настройка P3 напрямую управляет скоростью заряда синхронизирующего конденсатора Ct.
Две отдельные схемы сброса используются для сброса временного конденсатора Ct для каждого полупериода.
Одна схема сброса включает резистор R4 и диоды D1 и D2. Его функция — сбрасывать синхронизирующий конденсатор Ct в конце каждого положительного полупериода напряжения питания (то есть положительного значения на клемме L1 питания относительно клеммы L2). Резистор R4 подключен к клемме L1, катод D1 подключен к другому концу R4, а анод D1 подключен к входной клемме 12 моста.Катод D2 соединен с катодом D1, а анод D2 соединен с входным электродом 21 Diac. Конструкция и работа этой схемы сброса обычно обычны.
Вторая схема сброса включает в себя резистор R8 и диоды D3 и D4. Функция этой схемы сброса состоит в том, чтобы сбрасывать временный конденсатор Ct в конце каждого отрицательного полупериода напряжения питания. Резистор R8 подключен к клемме питания L1, а анод диода D3 подключен к другому концу R8.Катод диода D3 подключен к входной клемме 12 моста. Анод диода D4 соединен с анодом D3, а катод D4 соединен с входным электродом 21 Diac.
В наиболее важном применении схемы на фиг. 2 двигатель, с которым он используется, способен действовать как генератор, генерируя значительную противодействующую электродвижущую силу (далее именуемую CEMF). Например, двигатель может быть электродвигателем с постоянным магнитным полем или с шунтирующим полем с обмоткой.Существенным фактором является то, что во время части каждого полупериода, когда ток от линии питания не разрешен, двигатель действует как генератор и генерирует измеримую CEMF, которая появляется на якоре. Полярность CEMF противоположна полярности напряжения питающей сети, когда оно достигает двигателя.
Работу схемы можно лучше понять со ссылкой на фиг. 4 рисунков. В верхней части фиг. 4 показано переменное напряжение, поступающее от внешнего источника и принимаемое на клеммах питания L1 и L2.Нижняя волна, показанная на фиг. 4 представляет напряжение на временном конденсаторе Ct. Здесь видно, что напряжение на конденсаторе Ct нарастает (несколько экспоненциально) примерно в течение первой половины или двух третей приложенной полуволны напряжения питания. Затем достигается напряжение размыкания (предполагается, что для Diac составляет 32 вольта, и Diac запускается. Конденсатор времени Ct быстро разряжается до нулевого напряжения, на котором он остается на последней части приложенной полуволны напряжения). .Затем во время следующей следующей полуволны напряжения питающей сети (имеющей противоположную полярность) синхронизирующий конденсатор заряжается в противоположном направлении и снова запускает Diac, когда достигается напряжение отключения.
Форма центральной волны на фиг. 4 показана типичная волна напряжения, возникающая на якоре двигателя в условиях переменной нагрузки. Четыре последовательных полупериода напряжения питания показаны на фиг. 4, и предполагается, что механическая нагрузка на двигатель равна нулю, 25 процентов полной нагрузки, 50 процентов полной нагрузки, а затем 100 процентов полной нагрузки в течение этих четырех последовательных полупериодов.В условиях отсутствия нагрузки срабатывание Diac задерживается до его последней точки, и существует относительно большая часть полупериода, в течение которого двигатель действует как генератор и генерирует измеримую CEMF. Количество энергии, потребляемой из линии питания, ограничено из-за относительно короткой продолжительности периода проводимости симистора. По мере того как механическая нагрузка на двигатель увеличивается, точка воспламенения смещается к более ранней и более ранней точке полупериода, так что в условиях полной нагрузки Diac (и, следовательно, симистор) срабатывает примерно в точке 90 ° (или, возможно, в некоторой степени). ранее) в приложенной полуволне напряжения.Следовательно, количество энергии, потребляемой из цепи питания, намного больше.
Важная особенность работы двигателя, которая проиллюстрирована сигналами на фиг. 4, по-видимому, связано с собственной индуктивностью обмотки якоря. По мере того как механическая нагрузка на двигатель увеличивается, продолжительность каждого импульса тока, который он получает, становится больше, а управляющее напряжение, связанное с током, также немного увеличивается. После окончания основного импульса тока диоды мостовой схемы выпрямителя служат в качестве диодов свободного хода для поглощения, которое в противном случае было бы индуктивным толчком якоря.Пока этот индуктивный толчок поглощается, он предотвращает генерацию измеримого напряжения CEMF. Следовательно, напряжение CEMF, которое было большим по сравнению с напряжением, полученным от линии питания в условиях отсутствия нагрузки на двигатель, становится очень малым по сравнению с приложенным напряжением питающей сети, когда двигатель находится под полной нагрузкой.
Таким образом, в схеме фиг. 2 важно, что по мере того, как двигатель нагружен, CEMF уменьшается, позволяя синхронизирующему конденсатору Ct заряжаться быстрее, ускоряя срабатывание симистора и, следовательно, прикладывая большую мощность к двигателю.
ПОДРОБНОЕ ОПИСАНИЕ — РИСУНОК 3
Схема, показанная на фиг. 3 в целом аналогична схеме на фиг. 2, однако, мост подключен к линии L1, а не к линии L2. Потенциометр P4 подключен между входными клеммами 11,12 моста, а верхний конец потенциометра скорости P3 (ранее подключенный к клемме L1) теперь подключен к подвижному отводу потенциометра на P4.
В схеме на фиг. 3 подвижный отвод потенциометра P4 может быть перемещен в его правое положение, которое совпадает с входным выводом 12 моста.В этом положении потенциометра работа схемы такая же, как и для схемы на фиг. 2.
Однако подвижный отвод P4 также может быть расположен в промежуточном положении, как показано на чертеже, и в этом случае напряжение обратной связи, которое создается на двигателе, делится потенциометром P4, и только часть это напряжение обратной связи подается на потенциометр P3 установки скорости и временный конденсатор Ct. Уменьшение напряжения обратной связи приводит к тому, что на работу симистора и Diac все еще влияет нагрузка двигателя, но в меньшей степени.
Следует отметить, что ни схема на фиг. 2, ни схема на фиг. 3 содержит любые специальные положения для компенсации колебаний напряжения питающей сети.
ПОДРОБНОЕ ОПИСАНИЕ — РИСУНОК 1
Схема, показанная на фиг. 1 включает в себя основное сходство со схемой на фиг. 2, но имеет определенные отличия.
Таким образом, схема на фиг. 1 содержит только одну схему сброса для сброса синхронизирующего конденсатора Ct в конце каждого положительного полупериода.
Схема на фиг.1 также включает положение для компенсации линейного напряжения, состоящее из резистора R3 и стабилитронов Z. Резистор R3 подключен к клемме L1, а стабилитроны Z подключены между другим концом R3 и входной клеммой 12 моста. Диоды Z — это согласованная пара диодов, соединенных спина к спине. На резисторе R3 возникает значительное падение напряжения, и когда есть изменения в напряжении питающей сети, работа такова, что практически вся величина изменения проявляется на R3, и, таким образом, напряжение на стабилитронах Z остается стабильным.Потенциометр P1 скорости подключен между соединением R3 и Z, и входным электродом 21 Diac. Таким образом, рабочая скорость двигателя может быть выбрана правильной настройкой потенциометра P1, и последующие изменения напряжения питающей сети не окажут существенного влияния.
Схема на фиг. 1 также содержит контур обратной связи, который включает резистор R5, конденсатор C4 и потенциометр P2. Резистор R5 подключен к клемме L2 питания, конденсатор C4 подключен параллельно резистору R5, а потенциометр P2 подключен между другим концом R5 и входным электродом 21 Diac.
В схеме на фиг. 1 включение стабилитронов Z с целью регулирования линейного напряжения также имеет эффект устранения цепи обратной связи, которая существовала в схемах на фиг. 2 и 3. Следовательно, петля R5, P2 предназначена для добавления нового пути обратной связи. Значение P2 регулируется для управления величиной напряжения обратной связи. Конденсатор C4 включен во избежание склонности двигателя к колебаниям, которые в противном случае могли бы возникнуть.
Работа схемы по фиг.1 выглядит следующим образом:
В положительном полупериоде зарядный ток конденсатора Ct протекает через клемму 12 на клемму 13 моста, через якорь A на клемму 14 и, следовательно, на клемму 11, затем через R5 и P2 на Ct. . Однако путь обратной связи проходит от L2 к клемме 11 к клемме 14 через A к клемме 13 и клемме 12 и, следовательно, через Ct и P1 и R3 к L1.
В отрицательном полупериоде пути как для зарядного тока, так и для обратной связи остаются такими же, однако полярности тока и напряжения меняются местами
ЗНАЧЕНИЯ ЦЕПИ
Типичные значения схем для проиллюстрированных схем настоящего изобретения следующие:
P1 = потенциометр 100 кОм.- подключен как переменный резистор
P2 = потенциометр 250 кОм — подключен как переменный резистор
P3 = потенциометр 250 кОм — подключен как переменный резистор
P4 = потенциометр 10 кОм — подключен как потенциометр
R3 = 5 кОм
R4 = 15 кОм
R5 = 100 кОм
R6 = 100 Ом
R8 = 15 кОм
Ct = 0,1 мкФ
C2 = 0,1 мкФ
C3 = 0,1 мкФ
C4 = 0,01 мкФ
D1, D2, D3, D4 = полупроводниковые диоды
Изобретение было описано достаточно подробно, чтобы соответствовать патентным законам, обеспечивая полное публичное раскрытие по крайней мере одной из его форм.Однако такое подробное описание никоим образом не предназначено для ограничения широких признаков или принципов изобретения или объема предоставляемой патентной монополии.
Контроллер однофазного двигателя переменного тока серии 55AC
55AC Triac Управление скоростью двигателя переменного тока
Надежный, экономичный и компактный симисторный источник переменного напряжения переменного тока, специально изготовленный для вибропитателей, вентиляторов, насосов, систем отопления и освещения.Все модели имеют однофазный вход переменного тока и полностью регулируемый выход переменного тока. Закрытая версия имеет прочный корпус, переключатель включения / выключения, индикаторную лампу включения, предохранитель с передним доступом, а также удобные входные и выходные кабели и вилки. Сердцем системы управления является симистор, срабатывающий для регулировки фазы и, таким образом, изменения скорости. Серия 55 предназначена для работы с экранированными полюсами, постоянными разделенными конденсаторами, постоянными разделенными фазами, универсальными двигателями или любой резистивной нагрузкой. Он не предназначен для двигателей с конденсаторным пуском.
СЕРИЯ 55AC НЕ ЭКВИВАЛЕНТ ПРИВОДА ПЕРЕМЕННОЙ ЧАСТОТЫ / ПЕРЕМЕННОГО ТОКА.
Если у вас есть какие-либо вопросы о совместимости этого продукта с вашим двигателем / приложением, позвоните в службу технической поддержки Dart по телефону 317-873-5211.
- Управляет большинством однофазных двигателей переменного тока и резистивными нагрузками, не предназначенными для двигателей с конденсаторным пуском.
- Для вибропитателей, вентиляторов, насосов, отопления и освещения.Все модели имеют однофазный вход переменного тока и полностью регулируемый выход переменного тока
- Закрытая версия включает переключатель питания, индикаторную лампу включения и передний предохранитель
- Переключение симистора для изменения выходной фазы и, следовательно, скорости (совместимой)
| МОДЕЛЬ ШАССИ | ЗАКРЫТАЯ МОДЕЛЬ | ВХОД / ВЫХОД (В переменного тока) | РЕЙТИНГ AMP |
|---|---|---|---|
| 55AC10C | 55AC10E | 120 / 0-120 | 10А |
| 55AC15C | 55AC15E | 120 / 0-120 | 15А |
| 57AC10C | 57AC10E | 240 / 0-240 | 10А |
| 57AC15C | 57AC15E | 240 / 0-240 | 15А |