Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом.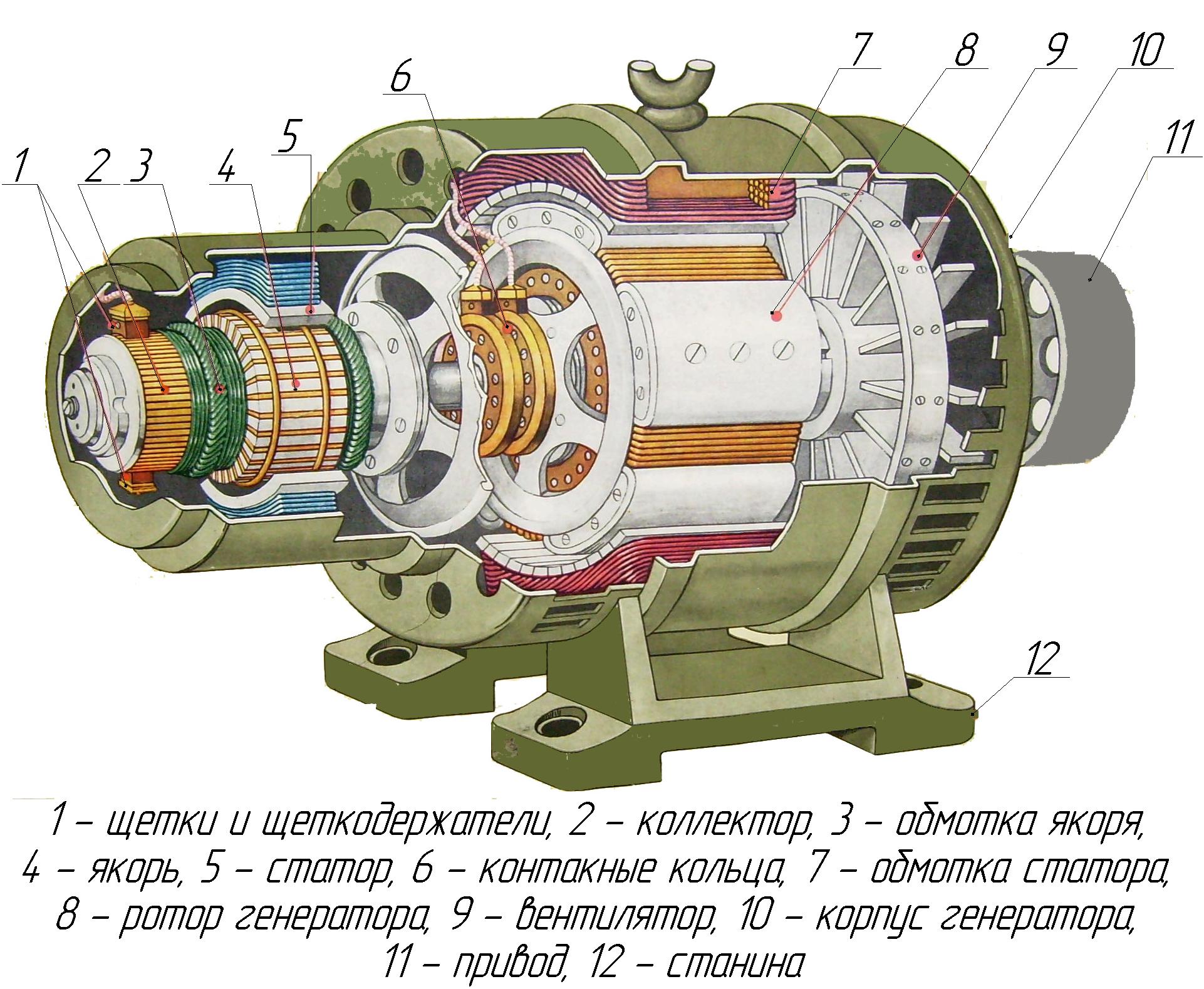 Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока.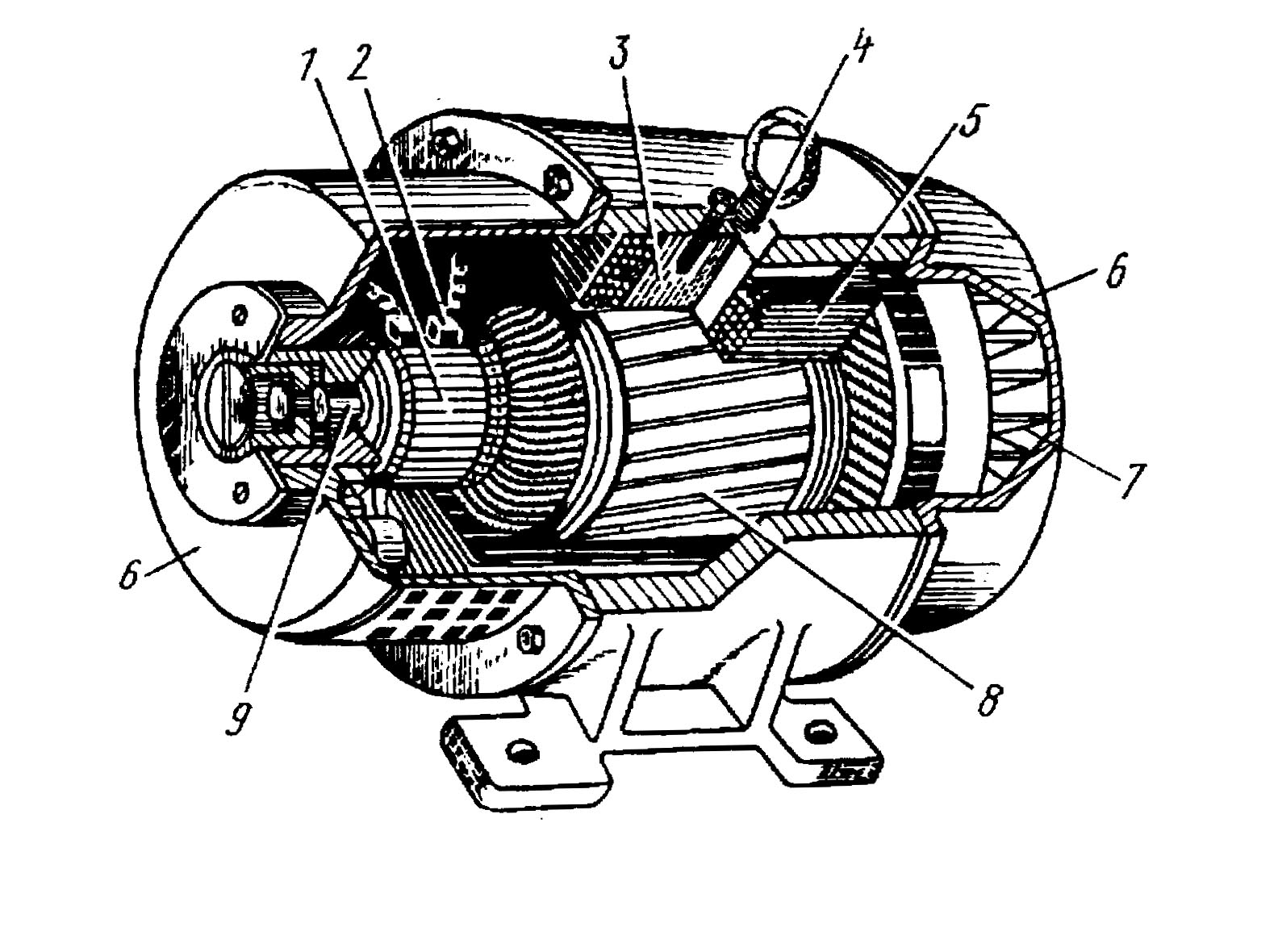 Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.
Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Мы узнали о различных типах электродвигателей в нашей предыдущей статье. Теперь мы начнем узнавать об этих моторах индивидуально. В этой статье мы рассмотрим теорию работы синхронного двигателя и его строение, а так же подскажем где вы можете купить.
Принцип синхронного двигателя
Основной принцип такой же, как и для всех двигателей. Это взаимная индукция между обмоткой статора и ротора, которая делает любой двигатель работоспособным. Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.
Кроме того, когда 3-фазная обмотка питается от 3-фазного источника питания, то создается магнитный поток постоянной величины, но вращающийся с синхронной скоростью.
Чтобы легко понять работу синхронного двигателя, давайте рассмотрим только два полюса в статоре и роторе. Как показано на рисунке, статор имеет два полюса Ns и S. Эти полюса, находясь под напряжением, создают вращающееся магнитное поле. Они вращаются с синхронной скоростью и позволяют считать направление вращения по часовой стрелке. Если полюса ротора находятся в положении, показанном на рисунке, то полюса отталкиваются друг от друга. Итак, северный полюс в статоре отталкивает северный полюс ротора. Также южный полюс статора отталкивает юг ротора. Это заставляет ротор вращаться в направлении против часовой стрелки. Таким образом, через полпериода полюса статора меняются местами, что приводит их в положение противоположенных полюсов Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.
Т.е. южный полюс статора и северный полюс ротора притягиваются и магнитно сцепляются.
В этом положении полюсы Ns притягивают S, а полюсы Ss притягивают N. Эти противоположные полюса ротора и статора начинают вращаться в том же направлении, что и полюса статора. Это заставляет ротор вращаться в одном направлении и с синхронной скоростью, которая равна скорости вращения полюсов статора. Таким образом, поскольку положение полюсов статора продолжает изменяться с быстрой скоростью и реверсированием, полюса ротора также вращаются и поворачиваются так же, как и статор, таким образом вызывая вращение ротора с постоянной, синхронной скоростью и в том же направлении. Приобрести синхронный двигатель можно, перейдя по ссылке ниже:
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Процедура запуска двигателя
Все синхронные двигатели оснащены «обмоткой короткозамкнутого ротора», состоящей из медных прутков, закороченных на обоих концах. Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Эти обмотки также служат для самостоятельного запуска синхронного двигателя. Во время запуска он легко запускается и действует как асинхронный двигатель. Для запуска синхронного двигателя сетевое напряжение подается на клеммы статора, а ротор остается не возбужденным. Он запускается как асинхронный двигатель, и когда он достигает скорости около 95% от своей синхронной скорости, на ротор подается слабое постоянное возбуждение. В результате чего ротор выравнивается синхронно со статором. В этот момент статор и полюса ротора сцепляются друг с другом и приводят двигатель в синхронность.
Фазовые колебания
Раскачка фазы синхронного двигателя вызваны:
- Различными нагрузками
- Пульсирующими частотами питания.
Когда синхронный двигатель нагружен (например, компрессоры, насосы и т.д.). Когда нагрузка увеличивается, его ротор возвращается назад на угол соединения «β». При дальнейшем увеличении нагрузки этот угол «β» дополнительно увеличивается, чтобы справиться с возросшей нагрузкой. В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
В этой ситуации, если нагрузка внезапно уменьшается, ротор перегружается, а затем оттягивается, чтобы приспособить новую нагрузку к двигателю. Таким образом, ротор начинает колебаться, как маятник, в своем новом положении, соответствующем его новой нагрузке, пытаясь восстановить равновесие. Если период времени этих колебаний совпадает с собственной частотой станка, то устанавливается резонанс, что может вывести машину из синхронизма. Для демпфирования таких колебаний используются «демпфирующие решетки», известные как «обмотки короткозамкнутых клеток».
Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом.
Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора.
Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.
Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов.
Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов.
Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали.
Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию.
Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки.
Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации.
При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей.
В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов.
Синхронные двигатели имеют основное преимущество по сравнению с асинхронными моторами тот факт, что возбуждение от постоянного тока внешнего источника дает возможность работы при значительной величине коэффициента мощности. Эта особенность дает возможность увеличить значение коэффициента мощности для общей сети благодаря включению синхронного мотора.
Синхронные электродвигатели имеют и другие достоинства:
- Электродвигатели синхронного типа работают с повышенным коэффициентом мощности, что создает уменьшение расхода энергии и снижает потери. КПД синхронного мотора выше при той же мощности асинхронного двигателя.
- Синхронные электродвигатели имеют момент вращения, который прямо зависит от напряжения сети. Поэтому он при уменьшении напряжения сохраняет свою мощность больше асинхронного.
 Это является фактором надежности подобных конструкций моторов.
Это является фактором надежности подобных конструкций моторов.
Недостатками являются следующие отрицательные моменты:
- При проведении сравнительного анализа конструкций двух моторов, можно отметить, что синхронные электродвигатели выполнены по более сложной схеме, поэтому их стоимость будет выше.
- Следующим недостатком для синхронных моторов стала необходимость в источнике тока в виде выпрямителя, либо другого блока питания постоянного тока.
- Запуск двигателя происходит по сложной схеме.
- Регулировка скорости вала двигателя возможна только одним способом, с помощью применения частотного преобразователя.
В итоге можно сказать, что все-таки преимущества синхронных двигателей перекрывают недостатки. Поэтому двигатели такого вида широко применяются в технологических процессах, где идет постоянный непрерывный процесс, и не требуется частая остановка и запуск оборудования: на мельничном производстве, в компрессорах, дробилках, насосах и так далее.
К вопросу приобретения синхронного электродвигателя нужно подходить, основываясь на следующие факторы:
- Условия эксплуатации электродвигателя. По условиям выбирают тип двигателя, который может быть защищенным, открытым или закрытым. А также синхронные электродвигатели отличаются по защите токовых частей от влаги, температуры, агрессивных сред. Для взрывоопасного производства существуют специальные защиты, предотвращающие образование искр в двигателе.
- Особенности выполнения подключения электродвигателя с потребителем.
Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности.
Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях.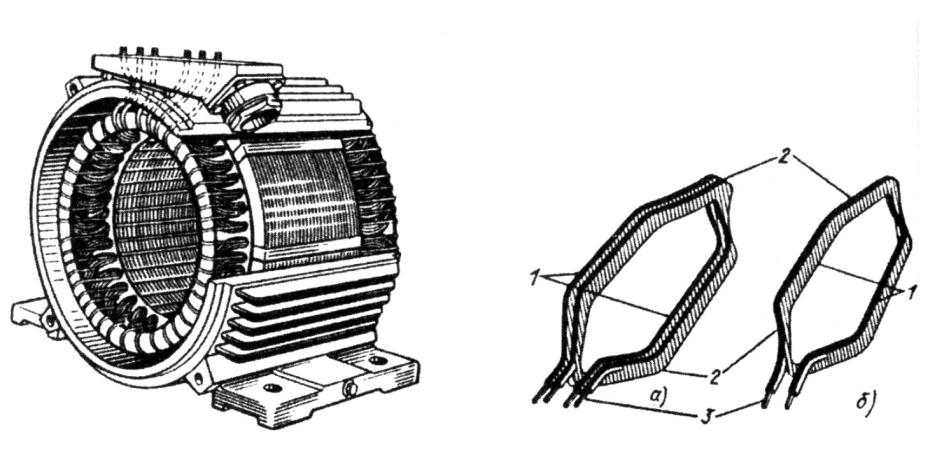 Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания.
Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется.
Сфера примененияШирокое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности.
Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети.
В итоге коэффициент мощности сети улучшается, и снижаются потери напряжения, увеличивается коэффициент мощности генераторов электростанций. Наибольший момент синхронного электродвигателя прямо зависит от напряжения, а у синхронного электромотора – от квадрата напряжения.
Поэтому, при уменьшении напряжения синхронный электромотор имеет по-прежнему значительную нагрузочную способность. Также, применение возможности повышения возбуждающего тока синхронных моторов дает возможность повышать их надежность эксплуатации при внезапных снижениях напряжения, и оптимизировать в таких случаях работу всей энергосистемы.
Из-за большой величины воздушного промежутка дополнительные потери в стальных сердечниках и в роторе синхронных моторов меньше, чем у двигателей асинхронного вида. Поэтому КПД синхронных моторов чаще бывает больше.
Поэтому КПД синхронных моторов чаще бывает больше.
Однако устройство синхронных моторов намного сложнее, а также необходим возбудитель или другое устройство питания возбуждения. Поэтому синхронные моторы имеют более высокую стоимость по сравнению с асинхронными с короткозамкнутым ротором.
Запуск и регулировка скорости у синхронных электродвигателей имеет свои сложности. Но при больших мощностях их преимущества превосходят недостатки. Поэтому они применяются во многих местах, где не нужны частые пуски, остановки оборудования, а также нет необходимости в регулировки оборотов двигателя с приводом механизмов насосов, компрессоров, мельниц и т.д.
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.
Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.
Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.
 д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
д. Они работают не напрямую от постоянного тока, а через специальный преобразователь. - Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.
Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.
При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
§89. Синхронный двигатель, принцип действия и устройство синхронного двигателя
Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
Объяс-
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
соответствует углу ? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол ? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол ? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
Электродвигатели, их классификация
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что американский стартап Malta получил $26 млн на создание системы хранения избыточной возобновляемой энергии в отдельных емкостях с расплавленной солью и жидкостью, подобной антифризу. Разработку поддержал фонд Breakthrough Energy Ventures, инвесторами которого являются Джефф Безос и Майкл Блумберг, а председателем Билл Гейтс.
По материалам: electrik.info.
Синхронные двигатели — двигатели переменного тока
Синхронные двигатели
Глава 13 — Двигатели переменного тока
Однофазные синхронные двигатели
Однофазные синхронные двигатели доступны в небольших размерах для приложений, требующих точного времени, таких как тайм-аут, часы и проигрыватели. Несмотря на то, что батареи с кварцевым аккумулятором с батарейным питанием широко доступны, линейка AC с линейным управлением имеет более долгосрочную точность — в течение нескольких месяцев. Это связано с тем, что операторы электростанций намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока. Если он отстает на несколько циклов, они составят потерянные циклы AC, чтобы часы не теряли времени.
Несмотря на то, что батареи с кварцевым аккумулятором с батарейным питанием широко доступны, линейка AC с линейным управлением имеет более долгосрочную точность — в течение нескольких месяцев. Это связано с тем, что операторы электростанций намеренно поддерживают долгосрочную точность частоты системы распределения переменного тока. Если он отстает на несколько циклов, они составят потерянные циклы AC, чтобы часы не теряли времени.
Большие и малые синхронные двигатели
Выше 10 лошадиных сил (10 кВт) более высокая эффективность и ведущий фактор мощности делают большие синхронные двигатели полезными в промышленности. Крупные синхронные двигатели на несколько процентов эффективнее, чем более распространенные асинхронные двигатели. Хотя синхронный двигатель более сложный.
Поскольку двигатели и генераторы схожи по конструкции, следует использовать генератор в качестве двигателя, наоборот, использовать двигатель в качестве генератора. Синхронный двигатель похож на генератор с вращающимся полем. На рисунке ниже показаны небольшие генераторы с полем вращения с постоянным магнитом. На этом рисунке ниже могут быть два параллельных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, или генератор переменного тока, управляющий синхронным двигателем. Или это могут быть два двигателя, если подключен внешний источник питания. Дело в том, что в любом случае роторы должны работать на одной и той же номинальной частоте и находиться в фазе друг с другом. То есть, они должны быть синхронизированы . Процедура синхронизации двух генераторов состоит в том, чтобы (1) открыть переключатель, (2) включить оба генератора с одинаковой скоростью вращения, (3) продвинуть или затормозить фазу одного блока, пока оба выхода переменного тока не будут в фазе, (4) закройте переключатель, прежде чем они выйдут из фазы. После синхронизации генераторы будут заблокированы друг от друга, требуя значительного крутящего момента, чтобы сломать один блок (независимо от синхронизации) от другого.
На рисунке ниже показаны небольшие генераторы с полем вращения с постоянным магнитом. На этом рисунке ниже могут быть два параллельных и синхронизированных генератора переменного тока, приводимых в действие механическими источниками энергии, или генератор переменного тока, управляющий синхронным двигателем. Или это могут быть два двигателя, если подключен внешний источник питания. Дело в том, что в любом случае роторы должны работать на одной и той же номинальной частоте и находиться в фазе друг с другом. То есть, они должны быть синхронизированы . Процедура синхронизации двух генераторов состоит в том, чтобы (1) открыть переключатель, (2) включить оба генератора с одинаковой скоростью вращения, (3) продвинуть или затормозить фазу одного блока, пока оба выхода переменного тока не будут в фазе, (4) закройте переключатель, прежде чем они выйдут из фазы. После синхронизации генераторы будут заблокированы друг от друга, требуя значительного крутящего момента, чтобы сломать один блок (независимо от синхронизации) от другого.
Учет момента с синхронными двигателями
ускорение крутящего момента или отставание настолько, что синхронизация теряется. Крутящий момент развивается только при поддержании синхронизации двигателя.Приведение синхронных двигателей до скорости
В случае небольшого синхронного двигателя вместо генератора переменного тока (выше справа) нет необходимости проходить сложную процедуру синхронизации генераторов. Тем не менее, синхронный двигатель не запускается самостоятельно и должен быть доведен до приблизительной электрической скорости генератора, прежде чем он заблокирует (синхронизируется) с частотой вращения генератора. После достижения скорости синхронный двигатель будет поддерживать синхронизацию с источником питания переменного тока и развивать крутящий момент.Sinewave управляет синхронным двигателем. Предполагая, что двигатель до синхронной скорости, так как синусоидальная волна изменяется на положительную величину на рисунке выше (1), нижняя северная катушка толкает северный полюс ротора, а верхняя южная катушка привлекает этот северный полюс ротора. Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке. К тому моменту, когда синусоидальная волна достигает пика при (2), крутящий момент, удерживающий северный полюс ротора вверх, максимален. Этот крутящий момент уменьшается, когда синусоидальная волна уменьшается до 0 В постоянного тока при (3) с минимальным крутящим моментом. Когда синусоидальная волна изменяется на отрицательную между (3 и 4), нижняя южная катушка толкает южный роторный полюс, притягивая полюс северного ротора ротора. Аналогичным образом, северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. На (4) синусоидальная область достигает отрицательного пика с удерживающим моментом снова максимум. Поскольку синусоидальная волна изменяется с отрицательного на 0 V DC на положительный, процесс повторяется для нового цикла синусоидальной волны. Обратите внимание, что на приведенном выше рисунке показано положение ротора для условия без нагрузки (α = 0 o ).
Аналогичным образом южный полюс ротора отталкивается верхней южной катушкой и притягивается к нижней северной катушке. К тому моменту, когда синусоидальная волна достигает пика при (2), крутящий момент, удерживающий северный полюс ротора вверх, максимален. Этот крутящий момент уменьшается, когда синусоидальная волна уменьшается до 0 В постоянного тока при (3) с минимальным крутящим моментом. Когда синусоидальная волна изменяется на отрицательную между (3 и 4), нижняя южная катушка толкает южный роторный полюс, притягивая полюс северного ротора ротора. Аналогичным образом, северный полюс ротора отталкивается верхней северной катушкой и притягивается к нижней южной катушке. На (4) синусоидальная область достигает отрицательного пика с удерживающим моментом снова максимум. Поскольку синусоидальная волна изменяется с отрицательного на 0 V DC на положительный, процесс повторяется для нового цикла синусоидальной волны. Обратите внимание, что на приведенном выше рисунке показано положение ротора для условия без нагрузки (α = 0 o ). На практике загрузка ротора приведет к тому, что ротор будет отставать от позиций, обозначенных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не достигнет значения α = 90 o . Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует при чередовании полярности. Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием. Так как катушечное поле пульсирует и не вращается, необходимо довести ротор постоянного магнита до скорости с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, аналогичный описанному в следующем разделе.
Добавление полюсов поля снижает скорость. Двухполюсный (пара NS-полюсов) генератор генерирует синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (обороты в минуту). 3600 об / мин соответствует 60 оборотам в секунду. Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин.
На практике загрузка ротора приведет к тому, что ротор будет отставать от позиций, обозначенных углом α. Этот угол увеличивается с нагрузкой до тех пор, пока максимальный крутящий момент двигателя не достигнет значения α = 90 o . Синхронизация и крутящий момент теряются за пределами этого угла. Ток в катушках однофазного синхронного двигателя пульсирует при чередовании полярности. Если скорость ротора постоянного магнита близка к частоте этого чередования, он синхронизируется с этим чередованием. Так как катушечное поле пульсирует и не вращается, необходимо довести ротор постоянного магнита до скорости с помощью вспомогательного двигателя. Это небольшой асинхронный двигатель, аналогичный описанному в следующем разделе.
Добавление полюсов поля снижает скорость. Двухполюсный (пара NS-полюсов) генератор генерирует синусоидальную волну 60 Гц при вращении со скоростью 3600 об / мин (обороты в минуту). 3600 об / мин соответствует 60 оборотам в секунду. Аналогичный двухполюсный синхронный двигатель с постоянными магнитами также будет вращаться со скоростью 3600 об / мин. Двигатель с более низкой скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель вращается со скоростью 1800 об / мин, 12-полюсный двигатель со скоростью 600 об / мин. Стиль конструкции, показанный (рисунок), показан для иллюстрации. У более мощных многополюсных статорных синхронных двигателей с более высоким коэффициентом мощности фактически есть несколько полюсов в роторе.Одновитковый 12-полюсный синхронный двигатель. Вместо того, чтобы наматывать 12-катушки для 12-полюсного двигателя, намотайте одну катушку с двенадцатью обмотками стальных полюсов, как показано на рисунке выше. Хотя полярность катушки чередуется из-за примененного переменного тока, предположим, что верхний край находится на север, нижний юг. Частицы полюсов направляют южный поток снизу и снаружи катушки вверх. Эти 6 юг чередуются с 6-северными язычками, изогнутыми вверх от вершины стального полюса катушки. Таким образом, стержень с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-циклам переменного тока при одном физическом вращении стержневого магнита.
Двигатель с более низкой скоростью может быть сконструирован путем добавления большего количества пар полюсов. 4-полюсный двигатель вращается со скоростью 1800 об / мин, 12-полюсный двигатель со скоростью 600 об / мин. Стиль конструкции, показанный (рисунок), показан для иллюстрации. У более мощных многополюсных статорных синхронных двигателей с более высоким коэффициентом мощности фактически есть несколько полюсов в роторе.Одновитковый 12-полюсный синхронный двигатель. Вместо того, чтобы наматывать 12-катушки для 12-полюсного двигателя, намотайте одну катушку с двенадцатью обмотками стальных полюсов, как показано на рисунке выше. Хотя полярность катушки чередуется из-за примененного переменного тока, предположим, что верхний край находится на север, нижний юг. Частицы полюсов направляют южный поток снизу и снаружи катушки вверх. Эти 6 юг чередуются с 6-северными язычками, изогнутыми вверх от вершины стального полюса катушки. Таким образом, стержень с постоянным магнитом столкнется с 6-полюсными парами, соответствующими 6-циклам переменного тока при одном физическом вращении стержневого магнита. Скорость вращения будет составлять 1/6 от электрической скорости переменного тока. Скорость вращения ротора будет 1/6 от того, что испытывает двухполюсный синхронный двигатель. Пример: 60 Гц будут вращать 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.Перепечатано с разрешения Westclox History на www.clockHistory.com Статор (Figabove) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция похожа на предыдущий рисунок с одной катушкой. Один тип катушки конструкции экономичен для двигателей с малым крутящим моментом. Этот двигатель с частотой вращения 600 об / мин приводит в движение редукторы, двигающие часами. Если бы двигатель Westclox работал с частотой 600 об / мин от источника питания 50 Гц, сколько полюсов потребуется «52018.jpg»>Перепечатано с разрешения Westclox History на www.clockHistory.com Ротор (Figabove) состоит из постоянного магнита и стальной асинхронной моторной чашки. Синхронный двигатель, вращающийся внутри полюсных выступов, сохраняет точное время.
Скорость вращения будет составлять 1/6 от электрической скорости переменного тока. Скорость вращения ротора будет 1/6 от того, что испытывает двухполюсный синхронный двигатель. Пример: 60 Гц будут вращать 2-полюсный двигатель со скоростью 3600 об / мин или 600 об / мин для 12-полюсного двигателя.Перепечатано с разрешения Westclox History на www.clockHistory.com Статор (Figabove) показывает 12-полюсный синхронный часовой двигатель Westclox. Конструкция похожа на предыдущий рисунок с одной катушкой. Один тип катушки конструкции экономичен для двигателей с малым крутящим моментом. Этот двигатель с частотой вращения 600 об / мин приводит в движение редукторы, двигающие часами. Если бы двигатель Westclox работал с частотой 600 об / мин от источника питания 50 Гц, сколько полюсов потребуется «52018.jpg»>Перепечатано с разрешения Westclox History на www.clockHistory.com Ротор (Figabove) состоит из постоянного магнита и стальной асинхронной моторной чашки. Синхронный двигатель, вращающийся внутри полюсных выступов, сохраняет точное время. Чашка асинхронного двигателя вне стержневого магнита подходит снаружи и над вкладками для самостоятельного запуска. В свое время были изготовлены несамоходные двигатели без асинхронного двигателя.
Чашка асинхронного двигателя вне стержневого магнита подходит снаружи и над вкладками для самостоятельного запуска. В свое время были изготовлены несамоходные двигатели без асинхронного двигателя.Трехфазные синхронные двигатели
Трехфазный синхронный двигатель, как показано на рисунке ниже, генерирует электрически вращающееся поле в статоре. Такие двигатели не запускаются самостоятельно при запуске с источника фиксированной частоты, такого как 50 или 60 Гц, как установлено в промышленных условиях. Кроме того, ротор не является постоянным магнитом, как показано ниже для многомоторных (многокилометровых) двигателей, используемых в промышленности, но электромагнит. Крупные промышленные синхронные двигатели более эффективны, чем асинхронные двигатели. Они используются, когда требуется постоянная скорость. Имея ведущий коэффициент мощности, они могут исправить линию переменного тока для запаздывающего коэффициента мощности. Три фазы возбуждения статора добавляют векторно для создания единственного результирующего магнитного поля, которое вращается f / 2n раз в секунду, где f — частота линии электропередачи, 50 или 60 Гц для двигателей с промышленной мощностью. Число полюсов равно n. Для скорости ротора в об / мин умножьте на 60.
Число полюсов равно n. Для скорости ротора в об / мин умножьте на 60.S = 120f / n, где: S = скорость вращения ротора в об / мин f = частота линии переменного тока n = количество полюсов на фазуТрехфазный 4-полюсный (по фазе) синхронный двигатель (рис. Ниже) будет вращаться со скоростью 1800 об / мин с частотой 60 Гц или 1500 об / мин с мощностью 50 Гц. Если катушки запитываются по очереди в последовательности φ-1, φ-2, φ-3, ротор должен поочередно указывать на соответствующие полюса. Поскольку синусоидальные волны фактически перекрываются, результирующее поле будет вращаться, а не шагами, но плавно. Например, когда синусоиды φ-1 и φ-2 совпадают, поле будет иметь пик, указывающий между этими полюсами. Показанный ротор магнитного магнита подходит только для небольших двигателей. Ротор с несколькими магнитными полюсами (справа внизу) используется в любом эффективном двигателе, несущем значительную нагрузку. Это будут электромагниты с кольцами с проскальзывающим кольцом в крупных промышленных двигателях.
 Крупные промышленные синхронные двигатели запускаются с помощью встроенных проводников с короткозамкнутым сердечником в арматуре, действуя как асинхронный двигатель. Электромагнитная арматура активируется только после того, как ротор будет доведен до близкой синхронной скорости.Трехфазный 4-полюсный синхронный двигатель
Крупные промышленные синхронные двигатели запускаются с помощью встроенных проводников с короткозамкнутым сердечником в арматуре, действуя как асинхронный двигатель. Электромагнитная арматура активируется только после того, как ротор будет доведен до близкой синхронной скорости.Трехфазный 4-полюсный синхронный двигательМалые многофазные синхронные двигатели
Малые многофазные синхронные двигатели (Figabove) могут запускаться путем изменения частоты вращения от нуля до конечной рабочей частоты. Многофазные сигналы возбуждения генерируются электронными схемами и будут квадратными волнами во всех, кроме самых сложных приложениях. Такие двигатели известны как бесщеточные двигатели постоянного тока. Истинные синхронные двигатели управляются синусоидальными волнами. Двух- или трехфазный привод может использоваться при подаче соответствующего количества обмоток в статоре. Показан только 3-фазный.Электронный синхронный двигатель На блок-схеме (рисунок) показана электроника привода, связанная с синхронным двигателем низкого напряжения (12 В постоянного тока ). Эти двигатели имеют датчик положения, встроенный в двигатель, который обеспечивает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя. Датчик положения может быть таким же простым, как датчики магнитного поля твердого тела, такие как устройства эффекта Холла, обеспечивающие коммутацию (направление тока якоря) в электронику привода. Датчик положения может быть угловым датчиком с высоким разрешением, таким как резольвер, индуктосин (магнитный кодировщик) или оптический кодер. Если требуется постоянная и точная скорость вращения (как для дисковода), может быть включен тахометр и фазовая автоподстройка . (Figurebelow) Этот сигнал тахометра, последовательность импульсы пропорциональны скорость двигателя, подаются обратно в контуре фазовой автоподстройки, который сравнивает частоту и фазу тахометра на стабильный источник опорной частоты, такие как кварцевый генератор.Контур фазовой автоподстройки частоты контролирует синхронную скорость двигателя.
Эти двигатели имеют датчик положения, встроенный в двигатель, который обеспечивает сигнал низкого уровня с частотой, пропорциональной скорости вращения двигателя. Датчик положения может быть таким же простым, как датчики магнитного поля твердого тела, такие как устройства эффекта Холла, обеспечивающие коммутацию (направление тока якоря) в электронику привода. Датчик положения может быть угловым датчиком с высоким разрешением, таким как резольвер, индуктосин (магнитный кодировщик) или оптический кодер. Если требуется постоянная и точная скорость вращения (как для дисковода), может быть включен тахометр и фазовая автоподстройка . (Figurebelow) Этот сигнал тахометра, последовательность импульсы пропорциональны скорость двигателя, подаются обратно в контуре фазовой автоподстройки, который сравнивает частоту и фазу тахометра на стабильный источник опорной частоты, такие как кварцевый генератор.Контур фазовой автоподстройки частоты контролирует синхронную скорость двигателя.Бесщеточный двигатель постоянного тока
Мотор, управляемый квадратными волнами тока, как это обеспечивается простыми датчиками эффекта холла, известен как бесщеточный двигатель постоянного тока . Этот тип двигателя имеет более высокий крутящий момент крутящего момента, изменяющийся через оборот вала, чем двигатель с синусоидальным приводом. Это не проблема для многих приложений. Хотя в первую очередь нас интересуют синхронные двигатели.Момент вращения двигателя и механический аналог. Момент пульсации или зубчатый зазор обусловлены магнитным притяжением полюсов ротора к кускам полюса статора. (Рисунок выше) Обратите внимание, что нет катушек статора, даже не мотор. Ротор ПМ может вращаться вручную, но при приближении к ним он будет притягиваться к полюсным наконечникам. Это аналогично механической ситуации. Момент пульсации будет проблемой для двигателя, используемого в проигрывателе «Resolver»>Обмотки, распределенные в поясе, создают более синусоидальное поле. Если двигатель приводится в действие синусоидальным током, синхронным с обратной эДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли сигналы возбуждения электронными средствами. Синхронный двигатель генерирует синусоидальную заднюю э. Д. С., Если магнитное поле статора имеет синусоидальное распределение. Он будет более синусоидальным, если полюсные обмотки распределены в поясе (рис. Выше) на многих слотах вместо сосредоточения на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Эта компоновка отменяет нечетные гармоники поля статора. Слоты, имеющие меньшее количество обмоток на краю фазовой обмотки, могут разделять пространство с другими фазами. Наматывающие ремни могут иметь альтернативную концентрическую форму, как показано на рисунке ниже.Концентрические ремни. Для двухфазного двигателя, управляемого синусоидой, крутящий момент является постоянным на всем протяжении тригонометрического тождества:
Этот тип двигателя имеет более высокий крутящий момент крутящего момента, изменяющийся через оборот вала, чем двигатель с синусоидальным приводом. Это не проблема для многих приложений. Хотя в первую очередь нас интересуют синхронные двигатели.Момент вращения двигателя и механический аналог. Момент пульсации или зубчатый зазор обусловлены магнитным притяжением полюсов ротора к кускам полюса статора. (Рисунок выше) Обратите внимание, что нет катушек статора, даже не мотор. Ротор ПМ может вращаться вручную, но при приближении к ним он будет притягиваться к полюсным наконечникам. Это аналогично механической ситуации. Момент пульсации будет проблемой для двигателя, используемого в проигрывателе «Resolver»>Обмотки, распределенные в поясе, создают более синусоидальное поле. Если двигатель приводится в действие синусоидальным током, синхронным с обратной эДС двигателя, он классифицируется как синхронный двигатель переменного тока, независимо от того, генерируются ли сигналы возбуждения электронными средствами. Синхронный двигатель генерирует синусоидальную заднюю э. Д. С., Если магнитное поле статора имеет синусоидальное распределение. Он будет более синусоидальным, если полюсные обмотки распределены в поясе (рис. Выше) на многих слотах вместо сосредоточения на одном большом полюсе (как показано на большинстве наших упрощенных иллюстраций). Эта компоновка отменяет нечетные гармоники поля статора. Слоты, имеющие меньшее количество обмоток на краю фазовой обмотки, могут разделять пространство с другими фазами. Наматывающие ремни могут иметь альтернативную концентрическую форму, как показано на рисунке ниже.Концентрические ремни. Для двухфазного двигателя, управляемого синусоидой, крутящий момент является постоянным на всем протяжении тригонометрического тождества:sin 2 θ + cos 2 θ = 1Генерация и синхронизация сигнала возбуждения требуют более точной индикации положения ротора, чем датчики эффекта холла, используемые в бесщеточных двигателях постоянного тока. Преобразователь, или оптический или магнитный кодер обеспечивает разрешение от сотен до тысяч частей (импульсов) за оборот. Резольвер обеспечивает аналоговые сигналы углового положения в виде сигналов, пропорциональных синусу и косинусу угла вала. Кодеры обеспечивают цифровую индикацию углового положения в серийном или параллельном формате. Привод синусоидальной волны фактически может быть от PWM, модулятора широтно-импульсной модуляции, высокоэффективного метода приближения синусоидальной формы к цифровой форме волны. (Рис. Ниже). Каждая фаза требует, чтобы электроника привода для этой формы волны сдвигалась на фазу на соответствующее количество на фазу.ШИМ приближается к синусоиде.
Электродвигатель переменного тока | Техника и человек
Электрические двигатели давно и прочно заняли лидирующие позиции среди силовых агрегатов различного типа оборудования. Их можно найти в автомобиле и в пылесосе, в сложнейших станках и в обычных детских игрушках. Они есть практически везде, хотя и отличаются между собой типом, строением и рабочими характеристиками.
Электродвигатели – это силовые агрегаты, способные превращать электрическую энергию в механическую. Различают два их основных вида: двигатели переменного и постоянного тока. Разница между ними, как понятно из названия, заключается в типе питающего тока. В данной статье речь пойдет о первом виде – электродвигателе переменного тока
Устройство и принцип работы
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
Устройство асинхронного двигателя
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.
Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Особенности электродвигателя переменного тока, его достоинства и недостатки
На сегодня электродвигатели являются одними из самых распространенных видов силовых установок, и тому есть немало причин. У них высокий КПД порядка 90%, а иногда и выше, довольно низкая себестоимость и простая конструкция, они не выделяют вредных веществ в процессе эксплуатации, дают возможность плавно менять скорость во время работы без использования дополнительных механизмов типа коробки передач, надежны и долговечны.
Среди недостатков всех типов электромоторов — отсутствие высокоемкостного аккумулятора электроэнергии для автономной работы.
Основное отличие электродвигателя переменного тока от его ближайшего родственника – электродвигателя постоянного тока – заключается в том, что первый питается переменным током. Если сравнивать их функциональные возможности, первый менее мощный, у него сложно регулировать скорость в широком диапазоне, он имеет меньший КПД.
Если же сравнивать асинхронный и синхронный электродвигатель переменного тока, то первый имеет более простую конструкцию и лишен «слабого звена» — графитовых щеток. Именно они обычно первыми выходят из строя при поломке синхронных двигателей. Вместе с тем, у него сложно получить и регулировать постоянную скорость, которая зависит от нагрузки. Синхронные двигатели позволяют регулировать скорость вращения с помощью реостатов.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными. Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость.
Схема подключения электродвигателя к сети
Электродвигатели переменного тока бывают трех и однофазные.
Асинхронные однофазные двигатели имеют на корпусе 2 вывода и подключить их к сети не составляет трудности. Т.к. вся бытовая электрическая сеть в основном однофазная 220В и имеет 2 провода — фаза и ноль. С синхронными все намного интереснее, их тоже можно подключить с помощью 2 проводов, достаточно обмотки ротора и статора соединить. Но соединять их нужно так, чтобы обмотки однополюсного намагничивания ротора и статора располагались напротив друг друга.
Сложности представляют двигатели для 3ех фазной сети. Ну во-первых у таких двигателей в основном в клеммной коробке 6 выводов и это означает что обмотки двигателя нужно подключать самому, а во-вторых их обмотки можно подключать разными способами — по типу «звезда» и «треугольник». Ниже приведен рисунок соединения клем в клеммной коробке, в зависимости от типа соединения обмоток.
Подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Обычно асинхронные двигатели предназначены для включения в трехфазную сеть на два разных напряжения, отличающиеся в раз. Например, двигатель рассчитан для включения в сеть на напряжения 380/660 В. Если в сети линейное напряжение 660 В, то обмотку статора следует соединить звездой, а если 380 В, то треугольником. В обоих случаях напряжение на обмотке каждой фазы будет 380 В. Выводы обмоток фаз располагают на панели таким образом, чтобы соединения обмоток фаз было удобно выполнять посредством перемычек, без перекрещивания последних. В некоторых двигателях небольшой мощности в коробке выводов имеется лишь три зажима. В этом случае двигатель может быть включен в сеть на одно напряжение (соединение обмотки статора такого двигателя звездой или треугольником выполнено внутри двигателя).
Принципиальная схема включения в трехфазную сеть асинхронного двигателя с фазным ротором показана на рисунке. Обмотка ротора этого двигателя соединена с пусковым реостатом ЯР, создающим в цепи ротора добавочное сопротивление Rдобав.
Синхронный двигатель, принцип работы и устройство, способы пуска и управления
Синхронные двигатели – это машины переменного тока, преобразующие электрическую энергию в механическое вращение приводного вала.
Их особенность проявляется в синхронном взаимодействии вращающейся ЭДС неподвижного статора с электромагнитным полем подвижного ротора.
Для понимания принципа этого взаимодействия важно ознакомиться с существующими разновидностями синхронных агрегатов и их устройством.
УСТРОЙСТВО И ПРИНЦИП РАБОТЫ СИНХРОННОГО ДВИГАТЕЛЯ
При рассмотрении устройства двигателей синхронного типа выделяются следующие основные части:
- литой корпус агрегата;
- неподвижный статор с комплектом обмоток;
- подвижный ротор с приводным валом;
- контактно-щеточный узел.
Статор или якорь электродвигателя набран из листов электротехнической стали, позволяющей усилить создаваемые в нем магнитные потоки.
В специальных пазах размещаются рабочие обмотки, создающие вращающееся магнитное поле. Кроме того, ротор электродвигателя оснащается обмоткой возбуждения, обеспечивающей электромагнитное взаимодействие с вращающимся полем статора.
При подаче напряжения в подвижном узле формируется собственное э/м поле, приводящее к вращению ротора с приводным валом. Контактные кольца с комплектом щеток необходимы для подачи питания на его обмотки.
Контактный узел используются не во всех моделях синхронных электродвигателей (на некоторых роторах устанавливаются постоянные магниты).
Роторные обмотки имеют два исполнения. Первое представлено образцами с явно выраженными полюсами, а второе имеет катушки распределенного типа (в этом варианте они укладываются в пазы ротора). Помимо этого описываемый узел может выполняться в виде короткозамкнутого витка (так называемая «беличья клетка»).
ВИДЫ И ХАРАКТЕРИСТИКИ ДВИГАТЕЛЕЙ СИНХРОННОГО ТИПА
По числу обмоток, используемых для создания вращающегося поля статора, все известные модели синхронных двигателей делятся на:
- однофазные;
- трехфазные устройства.
Последние предназначаются для работы в условиях повышенных напряжений и нагрузок, что характерно для условий промышленного производства. Их полезная мощность порой достигает сотен кВт.
В отличие от них однофазные электродвигатели могут подключаться к бытовым электрическим сетям переменного тока частотой 50 Гц и напряжением 220 Вольт. Как правило, эти устройства имеют мощность в пределах от 5 Вт до 10 кВт.
По рабочей эффективности они существенно уступают своим трехфазным аналогам. Однофазная схема включения заметно снижает КПД двигателя и величину его пускового момента. Вместе с тем агрегаты этого типа способны выдерживать большие перегрузки на валу.
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В сравнении с другими образцами машин переменного тока синхронные имеют следующие бесспорные преимущества:
- постоянство скорости вращения приводного вала при нагрузке, меняющейся в широких пределах;
- высокие показатели кпд и передачи полезной мощности в нагрузку;
- сравнительно низкий коэффициент реактивной составляющей;
- возможность длительной работы в режиме перегрузки;
- меньшая зависимость от колебаний напряжения в питающей сети.
Указанные преимущества и определяют области их применения: мощные вентиляционные системы, конвейерные линии, компрессоры и прокатные станы.
К числу существенных недостатков электродвигателей синхронного типа относят:
- сложность конструкции и сравнительно высокая стоимость;
- технические сложности с запуском электродвигателя в работу;
- потребность в дополнительном источнике постоянного напряжения;
- сложность управления основными параметрами двигателя (скоростью вращения и моментом на валу).
Все перечисленные недостатки синхронных машин переменного тока устраняются за счет использования дополнительных систем плавного запуска. Хорошего результата удается добиться, если для управления работой двигателя используются электронные устройства (частотные преобразователи).
СПОСОБЫ И УСТРОЙСТВА ПЛАВНОГО ПУСКА И УПРАВЛЕНИЯ
Добиться плавного пуска удается за счет использования дополнительного двигателя или же посредством асинхронного запуска.
Первый случай не требует пояснений, а во втором используется принцип асинхронности вращения э/м полей, приводящих к эффекту скольжения на начальном этапе работы. У каждого из этих вариантов имеются свои достоинства и недостатки.
При выборе подходящего для конкретных условий способа запуска обязательно учитываются конструктивные особенности ротора.
Для эффективного управления режимами работы синхронного двигателя используется зависимость частоты вращения ротора от питающего напряжения.
При заданном значении токовой составляющей такое управление сводится к изменению мощности на валу. Реализовать его удается различными способами, но наиболее эффективными считаются электронные устройства (преобразователи).
Для управления режимами работы применяются современные полупроводниковые компоненты. К последним относятся транзисторы, тиристоры и симисторы.
С помощью этих быстродействующих элементов удается менять величину мощности в нагрузке, используя принципы широтно-импульсного или фазоимпульсного регулирования.
* * *
© 2014-2021 г.г. Все права защищены.
Материалы сайта имеют ознакомительный характер и не могут использоваться в качестве руководящих и нормативных документов.
Электродвигатели Parker Hannifin
Электродвигатели.
Электродвигатели Parker Hannifin представлены двигателями постоянного тока, коллекторныыми двигателями с постоянными магнитами, и двигателями переменного тока, синхронными и асинхронными с короткозамкнутым ротором.
Синхронные двигатели.
Серия GVM.
Двигатели GVM являются синхронными серводвигателями переменного тока на постоянных магнитах. Достаточно большая величина крутящего момента, быстродействие и эффективность двигателей Parker Hannifin серии GVM обеспечивают требуемые условия для достижения впечатляющих рабочих характеристик во множестве платформ транспортных средств. Данные двигатели достаточно широко применяются в мотоциклах, скутерах, малотоннажных грузовиках, а также в электрогидравлических насосах.
Одним из знаковых применений двигателей серии GVM является использование в мотоциклах-прототипах фирмы Victory в гонке 2015 года на острове Мэн. Гонка на острове Мэн — самая длинная гонка для электромотоциклов в мире.
Двигатель Parker Hannifin серии GVM выдерживает очень высокие средние скорости порядка 200 км/ч
и обеспечивает длительную беспрерывную работу
в экстремальных температурных условиях.
Питание: 24 — 800 В DC.
Тип: синхронный, с редкоземельными магнитами.
Количество полюсов: 12.
Крутящий момент: до 376 Н·м.
Номинальная мощность: до 170 кВт.
Частота вращения: до 9800 Об/мин.
Обратная связь: резольвер, SinCos энкодер, бессенсорный.
Типоразмер: 142, 210.
Исполнение: IP67, IP6K9K (опц.).
Особенности: Отличное решения для мобильных приложений (электрокары, электромотоциклы и т.д.).
Серия NV.
Серия NV — синхронные двигатели с постоянными магнитами разработанные для высокоскоростных приложений. Высокая точность, низкий уровень вибрации и долгий срок службы обеспечивают работу при максимальной скорости вращения до 17000 об/мин. Уровень защиты корпуса: IP64, IP65, IP67 (по запросу).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 11,5 Нм.
Номинальная мощность: 0,7 — 11 кВт.
Частота вращения: 7000 — 17000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 60, 80, 110, 130.
Исполнение: IP64, IP65 (опц.).
Особенности: Подходят для высокоскоростных приложений.
Серия SMB/H/E, MB/H/E, NX.
Серии двигателей SMB/H/E, MB/H/E, NX представляют линейку синхронных двигателей с постоянными или редкоземельными магнитами.
Благодаря инновационной технологии «Salient Pole» (использование неодимового магнита — мощного постоянного магнита, состоящего из сплава редкоземельного элемента неодима, бора и железа) двигатели серии SMB/H/E, MB/H/E достигают высоких ускорений и выдерживают большие перегрузки без риска размагничивания или отрыва магнита. Совместимы со следующими сериями приводов: SLVD-N, TPD-M, HiDrive, ViX, TWIN-N/SPD-N.
Двигатели серии NX — компактные, с низкой пульсацией момента и плавным ходом, являются эффективной альтернативой традиционным индукционным двигателям. Бессенсорная версия двигателя была разработана в качестве альтернативного решения для минимизации затрат в сочетании с приводом Parker Hannifin AC650S.
Питание: 230, 400 — 480 В AC.
Тип: синхронный, с постоянными / редкоземельными магнитами.
Количество полюсов: 4 — 10.
Крутящий момент: 0,35 — 269 Нм.
Номинальная мощность: 0,2 — 67 кВт.
Частота вращения: 0 — 10000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), инк. энкодер.
Типоразмер: 40, 42, 56, 60, 70, 82, 92, 100, 105, 115, 120, 142, 145, 155,170, 205, 265.
Исполнение: IP44, IP64, IP65, IP67.
Особенности: Компактные с низкой пульсацией момента и плавным ходом.
Серия NK.
Серия NK — встраиваемые компактные бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений, обеспечивают работу при максимальной скорости вращения до 15000 об/мин.
Питание: 230, 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 0,4 — 90 Нм.
Номинальная мощность: 0,2 — 34 кВт.
Частота вращения: 1000 — 15000 Об/мин.
Обратная связь: резольвер, абс. энкодер (EnDat, Hiperface), бессенсорный.
Типоразмер: 42, 56, 62, 80, 110, 143.
Исполнение: IP00.
Особенности: Встраиваемые, компактные, для высокоскоростных приложений.
Серия TM/TK.
Серии синхронных двигателей с постоянными магнитами TM/TK обладают высокой прочностью и обеспечивают работу в жестких условиях. Высокий крутящий момент на малых оборотах предоставляет пользователю решение для следующих приложений: прессы, миксеры, намоточные машины, экструдеры. Серия TM имеет бескорпусное исполнение.
Питание: 400 — 480 В AC.
Тип: синхронный, с постоянными магнитами / +бескорпусной.
Количество полюсов: 24 — 120.
Крутящий момент: 90 — 22100 Нм.
Номинальная мощность: 6,9 — 394 кВт.
Частота вращения: 29 — 2500 Об/мин.
Обратная связь: Endat энкодер, бессенсорный, резольвер (опц.).
Типоразмер, мм: 398, 600, 830 / 230, 385, 565, 795.
Исполнение: IP54 / IP00.
Особенности: Высокий крутящий момент на малых оборотах, для прессов, миксеров, намоточных машин, экструдеров.
Серия HKW/SKW.
Серия HKW/SKW — бескорпусные синхронные электродвигатели с постоянными магнитами для высокоскоростных приложений мощностью до 230 кВт. Электродвигатели используются в приложениях, где высокий крутящий момент на низкой скорости и высокая скорость при постоянной мощности являются критичными характеристиками.
Питание: 400 — 480 В AC.
Тип: бескорпусной синхронный, с постоянными магнитами.
Количество полюсов: 4 — 16.
Крутящий момент: 3,5 — 1250 Нм.
Номинальная мощность: 2,0 — 230 кВт.
Частота вращения: 260 — 23200 Об/мин.
Обратная связь: бессенсорный, резольвер (опц.).
Типоразмер: 73, 82, 85, 91, 96, 108, 155.5, 195, 242, 310.
Исполнение: IP00.
Особенности: Встраиваемые, решения для высокоскоростных приложений.
Серия MGV.
Синхронный двигатель MGV на постоянных магнитах обеспечивает работу при максимальной скорости вращения до 45000 об/мин, используется во многих компонентах автомобильных или авиационных испытательных установок.
Питание: 400 — 480 В AC.
Тип: синхронный, на постоянных магнитах.
Количество полюсов: 4 — 16.
Крутящий момент: 6,8 — 1500 Нм.
Номинальная мощность: 15 — 500 кВт.
Частота вращения: 5000 — 45000 Об/мин.
Обратная связь: резольвер.
Типоразмер: 430, 635, 840, 860, 950, 966, A50, B40, B50.
Исполнение: IP40.
Особенности: Для высокоскоростных приложений тестовых стендов.
Серия EX/EY.
Синхронные электродвигатели EX/EY с постоянными магнитами обеспечивают работу в Зоне 2 при окружающей температуре от 40 ºC до 60 º. Оборудование соответствует стандартам ATEX, IECEx (Зона 1, 2).
Питание: 230, 400-480 В AC.
Тип: синхронный, с постоянными магнитами.
Количество полюсов: 10.
Крутящий момент: 1,75 — 41 Нм.
Номинальная мощность: до 6,3 кВт.
Частота вращения: 0 — 7600 Об/мин.
Обратная связь: резольвер, энкодер (опц.) (EnDat, Hiperface), бессенсорный.
Типоразмер:, 70, 92, 120, 121, 155.
Исполнение: IP64, IP65.
Особенности: ATEX, IECEx (зона 1, 2).
Асинхронные двигатели. Серия MS/MR.
Асинхронные двигатели серии MR подходят для использования со всеми сериями приводов Parker Hannifin переменного тока. Благодаря прочной жесткой конструкции и своим рабочим характеристикам, двигатели серии MR используются в жестких условиях.
Серия MS асинхронных двигателей Parker Hannifin была специально разработана для высокодинамичных приложений и использования с приводами переменного тока Parker Hannifin, имеющими векторное управление по замкнутому контуру, а именно: AC890, AC690+. Двигатели позволяют выполнять операции на постоянной мощности при максимальной скорости вращения до 8000 об/мин. Размеры корпуса идентичны корпусу двигателя постоянного тока с аналогичной мощностью. Уровень защиты корпуса: IP23, IP54, IP55 (опционально).
Питание: 400-460 В AC.
Тип: асинхронный.
Количество полюсов: 2 — 6.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальная мощность: 0,09 — 524 кВт.
Частота вращения: 0 — 8000 Об/мин.
Обратная связь: энкодер, резольвер (опц.).
Типоразмер: MS100, MS133, MS166, MS180, MS225, MS280; 56 — 200, 180 — 355.
Исполнение: IP23, IP54, IP55.
Особенности: Решение для широкого ряда приложений.
Коллекторные двигатели. Серия RS, RX / AXEM.
Сервомоторы серии RS — малоинерционные двигатели с магнитом из редкоземельных металлов.
Серия RX представляет собой высокоинерционные двигатели с ферритовым магнитом, которые демонстрируют высокие характеристики при работе на холостом ходу. Двигатель RX является экономически эффективным решением для различных серво-приложений. Серия RX также обеспечивает работу маломощных систем в Чистых помещениях.
Сервомоторы RS/RX постоянного тока в сочетании с приводами серии RTS полностью подходят для применений, где требуется компактное решение или высокий динамический уровень.
Двигатели серии AXEM являются одними из самых распространенных серводвигателей во всем мире — парк установленного оборудования насчитывает более 2 000 000 единиц. Сервомотор обеспечивает высокую динамику и управление на низкой скорости, а также работу без шума и вибраций. Надежное и эффективное решение с низкими эксплуатационными расходами.
Питание: 14 — 178 В DC.
Тип: коллекторный с редкоземельными магнитами / с плоским ротором.
Количество полюсов: 4 / нет.
Крутящий момент: 0,05 — 19,2 Нм.
Номинальный ток: 1,5 — 28 А.
Частота вращения: 2000 — 4800 Об/мин.
Обратная связь: тахогенератор, энкодер, резольвер.
Типоразмер: 39, 52, 58, 68, 83, 84, 97, 100, 110, 120, 140, 160, 211, 278.
Исполнение: IP20, IP40, IP54.
Особенности: Отличное управление на низкой скорости вращения, компактность, для медицинских приложений.
Семейство синхронных двигателей переменного тока с постоянным магнитом
Семейство синхронных двигателей
Синхронные двигатели с постоянными магнитами HURST ® являются реверсивными. двигатели с постоянным разделением конденсаторов, идентичные по конструкции Шаговые двигатели HURST ® . Двигатели для штабелирования таз 60 Гц работают при синхронные скорости 300 и 600 об / мин. Качественная передача — это доступны для моторов тазов. Керамический магнит ротора материал обеспечивает относительно высокий поток, что приводит к хорошему крутящему моменту соотношение размеров при умеренной стоимости.Кроме того, постоянный магнит конструкция обеспечивает динамическое торможение и низкую скорость вращения ротора для бесшумной работы и быстрого разгона. Недостатки Двигатели с постоянными магнитами имеют ограниченную способность ускоряться по инерции. нагрузки и высокая чувствительность к параметрам напряжения и фазирующий конденсатор. Первую из этих проблем можно свести к минимуму, зубчатые зацепления или в некоторых случаях упругие муфты. Чувствительность к напряжение и фазирующий конденсатор напрямую влияют на направленность надежность как запуска, так и работы под нагрузкой.В двигателе HURST ® Направленная надежность конструкции является первоочередной задачей и гарантируется, когда двигатели работают с рекомендованным конденсатором в диапазоне напряжений 10% от номинального.
- 24 или 115 В перем. Тока 50/60 Гц
- 35 мм Размер
- 24 или 115 В перем. Тока 50/60 Гц
- 35 мм Размер
- Крутящий момент до 150 унций
- Диапазон скоростей.От 3 до 300 об / мин
- До 900 Редуктор для мотор-редукторов
- 24 или 115 В перем. Тока 50/60 Гц
- 42 мм Размер
- 24 или 115 В перем. Тока 50/60 Гц
- 42 мм Размер
- Крутящий момент до 150 унций
- Диапазон скорости от 0,3 до 300 об / мин
- До 900 Редуктор для мотор-редукторов
- 24, 115 или 230 В перем. Тока 50/60 Гц
- Частота вращения 300 или 600 об / мин
- 24, 115 или 230 В перем. Тока 50/60 Гц
- Диапазон скорости от 1 до 600 об / мин
- Крутящий момент до 150 унций
- 49 мм Размер
- До 900 Редуктор для мотор-редукторов
- 24, 115 или 230 В перем. Тока 50/60 Гц
- 55 мм Размер
- 24, 115 или 230 В перем. Тока 50/60 Гц
- 55 мм Размер
- Крутящий момент до 200 унций
- Диапазон скоростей.От 5 до 300 об / мин
- До 600 Редуктор для мотор-редукторов
- 24, 115 или 230 В перем. Тока 50/60 Гц
- 59 мм Размер
- 24, 115 или 230 В перем. Тока 50/60 Гц
- 59 мм Размер
- Крутящий момент до 200 унций
- Диапазон скорости от 1 до 600 об / мин
- До 600 Редуктор для мотор-редукторов
- 24, 115 или 230 В перем. Тока 50/60 Гц
- Размер 24
- 24, 115 или 230 В перем. Тока 50/60 Гц
- Размер 24
- Крутящий момент до 250 унций
- Диапазон скоростей.От 25 до 300 об / мин
- До 600 Редуктор для мотор-редукторов
- 115 В перем. Тока 60 Гц
- Крутящий момент до 20 унций
- 300 об / мин, синхронная частота вращения
- 115 В перем. Тока 60 Гц
- Диапазон скоростей от 24 об / день до 120 об / мин
- Крутящий момент до 100 унций
- До 7200 Редуктор для мотор-редукторов
- 115 В перем. Тока 60 Гц
- Диапазон скорости от 1 до 120 об / мин
- Крутящий момент до 100 унций
- Включает интегральную муфту
- Увеличенный срок службы сцепления
- 115 В перем. Тока 60 Гц
- Диапазон скорости от 1 до 120 об / мин
- Крутящий момент до 100 унций
- Включает интегральную муфту
- Увеличенный срок службы сцепления
- 115 В перем. Тока 60 Гц
- Диапазон скорости от 1 до 300 об / мин
- NEMA 2-11 Монтаж
- Крутящий момент до 250 унций
Что такое синхронный двигатель переменного тока? Конструкции с гистерезисом и сопротивлением — Bodine
Введение
Разница между скоростью вращающегося магнитного поля асинхронного двигателя (которая всегда синхронна) и скоростью ротора известна как «скольжение.Когда конструкция ротора позволяет ему «синхронизироваться» с полем, скольжение уменьшается до нуля, и говорят, что двигатель работает с синхронной скоростью. По достижении рабочего режима синхронные двигатели работают с постоянной скоростью, которая зависит от частоты источника питания. Эта функция постоянной скорости делает синхронные двигатели переменного тока с фиксированной скоростью идеальным недорогим решением для синхронизации и других приложений, требующих постоянной выходной скорости и без необходимости регулирования скорости двигателя.
Устройство и работа:
Существует два распространенных типа малых синхронных асинхронных двигателей переменного тока, классифицируемых в зависимости от типа используемого ротора:
(1) синхронные двигатели с гистерезисом
(2) реактивные синхронные двигатели
1. Синхронные двигатели переменного тока с гистерезисом : В отличие от асинхронных двигателей переменного тока с короткозамкнутым ротором, этот тип двигателей развивает крутящий момент из-за потерь на магнитный гистерезис, индуцированных в сердечнике ротора из сплава с постоянным магнитом.Хотя статор в гистерезисной синхронной конструкции намотан так же, как и у обычного двигателя с короткозамкнутым ротором, его ротор изготовлен из термообработанного литого цилиндра из сплава с постоянными магнитами (с немагнитной опорой), надежно закрепленного на валу. Особые рабочие характеристики двигателя связаны с конструкцией его ротора. Ротор запускается по принципу гистерезиса и ускоряется с довольно постоянной скоростью, пока не достигает синхронной скорости вращающегося поля. Вместо постоянно закрепленных полюсов, имеющихся в роторе синхронной конструкции, полюса гистерезиса «индуцируются» вращающимся магнитным полем.Во время периода ускорения поле статора будет вращаться со скоростью, превышающей скорость ротора, и полюса, которые оно индуцирует в роторе, будут смещаться по его периферии. Когда скорость ротора достигает скорости вращающегося поля статора, полюса ротора занимают фиксированное положение. Как и в реактивном синхронном двигателе, в гистерезисных двигателях угол соединения не является жестким, и если нагрузка превышает допустимую для двигателя мощность, полюса на периферии сердечника ротора смещаются. Если затем нагрузка снижается до «втягивающей» способности двигателя, полюса будут занимать фиксированные положения до тех пор, пока двигатель снова не будет перегружен или остановлен и перезапущен.Гистерезисный ротор «заблокируется» в любом положении, в отличие от реактивного ротора, у которого есть только точки «фиксации», соответствующие выступающим полюсам на роторе.
2. Синхронный ротор с сопротивлением: Вариант классического ротора с короткозамкнутым ротором, синхронный ротор с реактивным сопротивлением модифицирован для обеспечения областей с высоким сопротивлением.
Это можно сделать, сделав выемки (или лыски) на периферии ротора. Количество выемок будет соответствовать количеству полюсов в обмотке статора.Участки периферии ротора между областями с высоким сопротивлением известны как выступающие полюса. Поскольку эти полюса создают путь с низким сопротивлением для магнитного потока статора, они притягиваются к полюсам поля статора.
Реактивный синхронный ротор запускается и ускоряется как обычный ротор с короткозамкнутым ротором, но по мере приближения к скорости вращения поля достигается критическая точка, в которой наблюдается повышенное ускорение, и ротор «защелкивается» синхронно с полем статора.Если нагрузка (особенно инерционная) слишком велика, двигатель не достигнет синхронной скорости. Вращающий момент двигателя определяется как максимальная нагрузка, которую двигатель может разгонять и синхронизировать при номинальном напряжении и частоте. Приложенная нагрузка, превышающая номинальный крутящий момент «втягивания», не позволит двигателю синхронизировать нагрузку и приведет к грубой, неравномерной работе.
Фазовое соотношение между полюсами вращающегося поля и ротора известно как угол сцепления, выраженный в механических градусах.Этот угол сцепления не является жестким, но будет «увеличиваться» с увеличением нагрузки. При отсутствии нагрузки полюса ротора будут совпадать с полюсами возбуждения, и угол соединения считается нулевым.
Рис. 3: Сравнение типичного реактивного синхронного ротора (слева) и гистерезисного синхронного ротора (в центре и справа).
Когда к реактивным синхронным двигателям прилагается нагрузка, магнитные силовые линии, связывающие ротор с полем статора, растягиваются, увеличивая угол соединения.Если нагрузка превышает возможности двигателя, магнитная связь между полюсами ротора и полем статора разрывается, и ротор «вырывается» из синхронизма. «Вытягивающий» крутящий момент определяется как максимальный крутящий момент, который двигатель может обеспечить при синхронной скорости. Синхронные двигатели с реактивным сопротивлением доступны в трехфазном исполнении переменного тока (режим инвертора), а также в однофазных версиях в конфигурациях с разделенной фазой (с переключателем центробежного пуска), CS (конденсаторный пуск) и PSC (постоянный разделенный конденсатор).Эти двигатели имеют характеристики, сопоставимые с их несинхронными аналогами, использующими те же типы обмоток статора. Для сравнимой мощности при заданном размере корпуса трехфазный синхронный двигатель или реактивный синхронный двигатель PSC будет обеспечивать более тихую работу и более близкую к равномерной угловую скорость, чем синхронный двигатель с расщепленной фазой или реактивным двигателем CS.
Как показано на рисунке 3, реактивный ротор может быть перекошен для повышения плавности работы.
Заявки:
Как и реактивные синхронные двигатели, синхронные двигатели переменного тока с гистерезисом используются в оборудовании, которое требует точно поддерживаемой (фиксированной) скорости.Типичными приложениями являются временные механизмы или приводы, требующие постоянной связи со временем, такие как картплоттеры, акустическое оборудование, часы и дисководы. Электродвигатель гистерезисного типа имеет преимущества по сравнению с электродвигателем реактивного типа, где уровень шума должен быть низким, инерция нагрузки имеет тенденцию быть высокой или когда требуются две или более синхронных скорости, не прибегая к более совершенным электронным средствам управления скоростью.
Стандартные двигатели переменного тока с фиксированной скоростью доступны до 1/8 л.с. при 1800 (4-полюсный) и 3600 об / мин (2-полюсный), 60 Гц, однофазный.Скорости 600, 900 и 1200 об / мин также доступны для определенных размеров рамы. Возможны также варианты конструкции с двумя скоростями, такие как 600/1200, 900/1800 и 1800/3600 об / мин для 60 Гц, однофазный. Другие двухскоростные и трехскоростные комбинации доступны как индивидуальные (изготавливаемые на заказ) решения, а также двигатели и мотор-редукторы для других напряжений, частот и номиналов, включая трехфазные (инверторный) мотор-редукторы, которые работают с синхронной скоростью.
Преимущества:
Синхронные двигатели работают с постоянной (фиксированной) скоростью, определяемой количеством полюсов статора и частотой источника питания.В пределах ограниченного крутящего момента и отсутствия изменения частоты сети скорость можно считать постоянной. Модели с инверторным режимом (3-фазные) могут работать с переменной скоростью в зависимости от выходной частоты от регулятора скорости переменного тока (VFD = частотно-регулируемый привод).
Синхронные двигателис гистерезисом, с их равномерными характеристиками ускорения, могут синхронизировать любую нагрузку, которая находится в пределах их возможностей для запуска и ускорения.
Недостатки:
Синхронизация характеристик реактивного двигателя требует повышенного ускорения ротора в критической точке, когда он приближается к скорости вращения поля.По этой причине возможно, что, хотя реактивный двигатель может легко запустить нагрузку с высоким моментом инерции, он не сможет ускорить нагрузку настолько, чтобы привести ее в синхронизм. Поэтому важно, чтобы при применении синхронных двигателей были уверены, что они разгонят нагрузки до синхронной скорости при самых неблагоприятных условиях нагрузки и напряжения.
Заключение:
Синхронные мотор-редукторы с фиксированной скоростью или двигатели идеальны для применений, где нагрузка должна приводиться в движение с точной скоростью, и где желательно не контролировать скорость двигателя с помощью регулятора скорости переменного тока (VFD).Для заданной мощности синхронные двигатели обычно немного больше и стоят дороже, чем несинхронные двигатели или мотор-редукторы, но для них не требуется дорогостоящее регулирование скорости.
Синхронные мотор-редукторы и двигатели переменного тока с регулируемой скоростью идеально подходят для применений, в которых несколько приводных двигателей работают от одного регулятора скорости переменного тока (ЧРП). Поскольку каждый двигатель или мотор-редуктор будут работать с одинаковой выходной скоростью, несколько осей могут работать синхронно без необходимости в устройстве обратной связи (энкодере) или системе сервопривода.Если несколько синхронных мотор-редукторов переменного тока работают от одного инверторного привода (VFD), сумма номинальной мощности двигателя для всех синхронизированных осей должна быть равна или меньше номинальной выходной мощности VFD. То же самое относится к номинальному постоянному току инвертора — когда несколько мотор-редукторов питаются от одного частотно-регулируемого привода, номинальный постоянный ток преобразователя должен быть равен или превышать сумму токов отдельных электродвигателей.
Пример применения: Четыре (4) синхронных инвертора (с регулируемой скоростью) мотор-редуктора 30R-D приводят в действие (4) дозирующие насосы чернил в большом газетном печатном станке.Для получения индивидуальных решений для мотор-редукторов, подобных этому, свяжитесь с нашей командой инженеров.
Авторские права Bodine Electric Company © 06/2017. Все права защищены.
Все о синхронных двигателях — что это такое и как они работают
Большинство людей понимают, что электродвигатели используют электроэнергию для создания движения, но немногие знают, сколькими различными способами это можно сделать.
Может показаться излишним создавать новые способы выполнения той же задачи, но у инженеров есть для этого веские основания.Некоторые двигатели питаются от постоянного тока, другие от переменного тока, третьи — от их комбинации, и их конкретный метод передачи энергии уникален для каждого двигателя. В результате существует множество типов двигателей постоянного и переменного тока, каждый из которых имеет свои преимущества в определенных областях применения. В этой статье речь пойдет о двигателях, которые используют как переменный, так и постоянный ток, известных как синхронные двигатели, которые используют электромагнетизм для создания точной выходной энергии вращения. Эта статья призвана объяснить структуру, функции и области применения синхронных двигателей, чтобы каждый, кто хочет использовать одно из этих устройств, имел для этого необходимую информацию.
Что такое синхронные двигатели?
Синхронные двигатели считаются типом двигателей переменного тока, созданным специально для решения ограничений, связанных с асинхронными двигателями, еще одним распространенным классом двигателей переменного тока (более подробную информацию об этих двигателях можно найти в нашей статье об асинхронных двигателях). Асинхронные двигатели, как следует из их названия, используют электромагнитную индукцию для выработки механической энергии; однако их главный недостаток заключается в том, что они испытывают феномен «скольжения». Это «скольжение» представляет собой несоответствие между частотой колебаний переменного тока (вход) и частотой вращения (выход) и является прямым результатом использования эффекта индукции для создания вращения.Обычные асинхронные двигатели, не имеющие особого отношения к большинству применений, не могут использоваться для точно синхронизированных приложений из-за этого скольжения и известны как «асинхронные» двигатели.
С другой стороны, синхронные двигателибыли сконструированы таким образом, что выходная частота вращения в точности равна входной частоте переменного тока. Их можно использовать для часов, прокатных станов и даже проигрывателей, потому что их скорость точно пропорциональна переменному току, питающему двигатель. Хотя синхронные двигатели не такие мощные и разнообразные, как асинхронные двигатели, они играют жизненно важную роль в любом проекте, который требует точной синхронизации и точной частоты вращения.
Как работают синхронные двигатели?
Как и другие асинхронные двигатели, синхронные двигатели состоят из внешнего статора и внутреннего ротора, которые магнитно взаимодействуют для создания выходного крутящего момента. Как и другие двигатели переменного тока, синхронные двигатели могут питаться от однофазного входа (например, настенные розетки) или от многофазного входа (промышленные / более высокие источники напряжения), в зависимости от размера и применения. Более подробную информацию об однофазных операциях можно найти в нашей статье об однофазных двигателях.
Статор синхронного двигателя такой же, как и у других асинхронных двигателей, в котором катушки из меди / алюминия проходят через ламинированные листы металла. Эти катушки пропускают переменный ток (ы) для создания вращающегося магнитного поля (RMF). Больше всего они отличаются своими роторами, которые содержат постоянное магнитное поле, создаваемое либо настоящими магнитами, либо источником постоянного тока через катушки ротора. Это постоянное поле имеет свой собственный набор полюсов север-юг, которые в конечном итоге выровняются с полюсами RMF (в парах север-юг), таким образом вызывая точный выходной сигнал вращения, пропорциональный частоте статора.Эти полюса могут выступать из поверхности ротора или находиться в пазах на роторе, и они известны как роторы с явнополюсными и невыпадающими полюсами, соответственно. Однако для запуска должно быть некоторое возбуждение, поскольку разница в скорости между неподвижным ротором и быстрым RMF не позволит их полюсам заблокироваться при запуске. Это осуществляется по-разному, и в результате синхронные двигатели были разделены на синхронные двигатели без возбуждения и синхронные двигатели с возбуждением по току.
Типы синхронных двигателей
Как описано ранее, синхронные двигатели можно различать на основе того, как их роторы возбуждаются до синхронных скоростей.Существуют синхронные двигатели без возбуждения и синхронные двигатели с возбуждением по току, и в этом разделе кратко рассматриваются различные двигатели каждой из этих категорий.
Двигатели синхронные без возбуждения
Этим синхронным двигателям не требуется напряжение возбуждения для запуска, и в их роторах используются ферромагнитные материалы для взаимодействия со статорами. Они бывают трех основных типов: гистерезисные двигатели, синхронные реактивные двигатели и двигатели с постоянными магнитами, и каждый из них будет кратко объяснен ниже.
В двигателях с гистерезисомиспользуется вал ротора, заключенный в немагнитный материал (обычно алюминий), который имеет слой ферромагнитного материала, покрывающий его, образуя «кольцо гистерезиса». RMF статора индуцирует полюса в этом кольце, но из-за некоторых потерь на гистерезис — или потерь энергии из-за задержки между намагниченностью ферромагнетика и изменяющимся магнитным потоком — магнитный поток ротора будет отставать от потока статора. Эта задержка вызывает угловое разделение между полем ротора и полем статора, вызывая крутящий момент.Это относительно бесшумные моторы, которые лучше всего подходят для проигрывателей, магнитофонов и другого звукового оборудования.
В электродвигателях с сопротивлениемдля создания движения используется магнитное притяжение и явление сопротивления. Они похожи на шаговые и асинхронные двигатели по конструкции, где статор состоит из выступающих полюсов катушек, которые генерируют магнитное поле. Ротор выполнен из ферромагнитного металла в виде модифицированной беличьей клетки. Ротор имеет выемки, барьеры или пазы, которые совпадают с линиями магнитного поля статора, когда полюса ротора и статора совпадают.При несовпадении магнитное поле проходит через ротор по более длинному пути и вызывает увеличение сопротивления — магнитного аналога электрического сопротивления. Это создает реактивный момент на двигателе, так как ротор хочет достичь некоторого более низкого сопротивления или вернуться в свое выровненное положение. Это позволяет ротору «втягиваться» в синхронные скорости в некоторых конструкциях, обеспечивая точное вращение на выходе. Более подробную информацию можно найти в нашей статье о реактивных двигателях.
В двигателях с постоянными магнитами неудивительно, что в их роторах используются постоянные магниты.которые создают постоянный магнитный поток. Это взаимодействует с полюсами RMF статора, которые вызывают вращение на выходе. Эти двигатели должны управляться частотно-регулируемым приводом (VFD), поскольку единственный способ изменить их скорость и крутящий момент — это изменить частоту переменного тока статора. Более подробную информацию можно найти в нашей статье о двигателях с постоянными магнитами.
Синхронные двигатели с токовым возбуждением
Единственный доступный синхронный двигатель с возбуждением от основного тока — это синхронный двигатель с возбуждением от постоянного тока, для которого требуется как вход постоянного, так и переменного тока.Источник постоянного тока поступает на ротор, который содержит обмотки, похожие на статор, и эти обмотки будут создавать постоянное магнитное поле, индуцированное источником постоянного тока. Это возбудит двигатель и заставит его полюса выровняться с RMF статора, вызывая синхронность. Эти двигатели обычно имеют мощность> 1 л.с. и часто их называют просто синхронными двигателями, поскольку такая конструкция ротора очень распространена.
Заявки и критерии отбора
Различные обсуждаемые синхронные двигатели — это просто разные средства для создания синхронной скорости, и они, как правило, могут использоваться в приложениях, где требуется точная скорость.Они не являются самозапускающимися по своей природе, и их не следует выбирать, если требуется самозапуск. Все они имеют повышенный КПД по сравнению с большинством других двигателей переменного и постоянного тока с КПД> 90%. Синхронные двигатели являются предпочтительным выбором для низкоскоростных и высокомощных нагрузок и превосходны в качестве источников питания для дробилок, мельниц и измельчителей. Их скорость остается постоянной независимо от нагрузки, а их скорость может быть изменена только с помощью частотно-регулируемого привода, поскольку входной ток напрямую зависит от выходной скорости. Если требуются регулируемые скорости, подумайте о двигателях с фазным ротором.
Асинхронные двигатели той же мощности и номинального напряжения, как правило, дешевле синхронных двигателей с такими же характеристиками. Это означает, что асинхронные двигатели являются предпочтительным выбором для привода машин в большинстве случаев. Синхронные двигатели обладают способностью корректировать потери в распределительной сети и очень полезны для регулирования напряжения. Синхронные двигатели чаще всего используются в больших генераторах или параллельно с асинхронными двигателями, предназначенными для компенсации потерь мощности. Кроме того, их намного сложнее обслуживать, чем асинхронные двигатели, и они требуют более частого обслуживания.
Может показаться, что синхронные двигатели уступают асинхронным двигателям, но без них у нас не было бы часов, проигрывателей, дворников, жестких дисков, сигнальных устройств, записывающих приборов, микроволновых пластин или любого другого синхронизирующего устройства. Точно так же эффективность этих двигателей помогает исправить неэффективность асинхронных двигателей и обеспечивает средства коррекции потерь при распределении. Они неоценимы для промышленности как по своей способности корректировать мощность, так и по своей точности, и хотя синхронные двигатели дороже и сложнее, чем асинхронные двигатели, они являются еще одной способной машиной, которую могут использовать конструкторы.
Сводка
В этой статье представлено понимание того, что такое синхронные двигатели и как они работают. Для получения дополнительной информации о сопутствующих продуктах обратитесь к другим нашим руководствам или посетите платформу Thomas Supplier Discovery Platform, чтобы найти потенциальные источники поставок или просмотреть подробную информацию о конкретных продуктах.
Источники:
- https://geosci.uchicago.edu
- http://nit-edu.org/wp-content/uploads/2019/06/ch-38-Synchronous-motor.pdf
- http: // www.electricmastar.com/synchronous-motor/
- https://electricalfundablog.com/synchronous-motor/
- http://www.egr.unlv.edu/~eebag/Synchronous%20Generator%20I.pdf
Прочие изделия для двигателей
Больше от Machinery, Tools & Supplies
Синхронные двигатели переменного тока
|
Двигатель синхронный — строительно-рабочий
Синхронный двигатель и асинхронный двигатель — наиболее широко используемые типы двигателей переменного тока.Конструкция синхронного двигателя аналогична генератору переменного тока. Та же самая синхронная машина может использоваться как синхронный двигатель или как генератор переменного тока. Синхронные двигатели доступны в широком диапазоне, обычно мощностью от 150 кВт до 15 МВт со скоростью от 150 до 1800 об / мин.Конструкция синхронного двигателя
Конструкция синхронного двигателя (с явнополюсным ротором) показана на рисунке слева. Как и любой другой двигатель, он состоит из статора и ротора.Сердечник статора изготовлен из тонкой кремниевой пластинки и изолирован поверхностным покрытием, чтобы минимизировать потери на вихревые токи и гистерезис. Внутри статора имеются осевые пазы, в которых размещена трехфазная обмотка статора. Статор намотан трехфазной обмоткой на определенное количество полюсов, равное полюсам ротора.Ротор в синхронных двигателях в основном является явнополюсным. Питание постоянного тока на обмотку ротора подается через контактные кольца. Постоянный ток возбуждает обмотку ротора и создает электромагнитные полюса.В некоторых случаях также можно использовать постоянные магниты. На рисунке выше очень кратко показана конструкция синхронного двигателя .
Работа синхронного двигателя
Статор намотан на такое же количество полюсов, что и ротор, и питается от трехфазного источника переменного тока. Трехфазный источник переменного тока создает вращающееся магнитное поле в статоре. Обмотка ротора питается от источника постоянного тока, который намагничивает ротор. Рассмотрим двухполюсную синхронную машину , как показано на рисунке ниже.- Теперь полюса статора вращаются с синхронной скоростью (скажем, по часовой стрелке). Если положение ротора таково, что полюс N ротора находится рядом с полюсом N статора (как показано на первой схеме на рисунке выше), то полюса статора и ротора будут отталкиваться друг от друга, и создаваемый крутящий момент будет против часовой стрелки .
- Полюса статора вращаются с синхронной скоростью, они вращаются очень быстро и меняют свое положение. Но очень скоро ротор не сможет вращаться на тот же угол (из-за инерции), и следующая позиция, вероятно, будет второй схемой на приведенном выше рисунке.В этом случае полюса статора будут притягивать полюса ротора, и крутящий момент будет вращаться по часовой стрелке.
- Следовательно, на ротор будет действовать быстро меняющийся крутящий момент, и двигатель не запустится.
Характерные особенности синхронного двигателя
- Синхронный двигатель будет работать либо с синхронной скоростью, либо не будет работать вообще.
- Единственный способ изменить его скорость — это изменить его частоту питания. (Поскольку Ns = 120f / P)
- Синхронные двигатели не запускаются автоматически. Им нужна некоторая внешняя сила, чтобы приблизить их к синхронной скорости.
- Могут работать при любом коэффициенте мощности, как отстающем, так и опережающем. Следовательно, синхронные двигатели могут использоваться для улучшения коэффициента мощности.
Применение синхронного двигателя
- Поскольку синхронный двигатель может работать как с опережающим, так и с запаздывающим коэффициентом мощности, его можно использовать для повышения коэффициента мощности. Синхронный двигатель без нагрузки с опережающим коэффициентом мощности подключается к энергосистеме, в которой нельзя использовать статические конденсаторы.
- Используется там, где требуется высокая мощность при низкой скорости.Такие как прокатные станы, измельчители, смесители, насосы, насосы, компрессоры и т. Д.
3-фазный синхронизатор тока DS2: энергоэффективный
Синхронные двигатели в Baumüller называются двигателями DS. «DS» в переводе с немецкого означает синхронный двигатель трехфазного тока («Синхронный двигатель Дрехстрема»).
Серия DS2 доступна в версиях с воздушным и водяным охлаждением
Принцип действия синхронного двигателя трехфазного тока
Это синхронный двигатель с постоянным возбуждением, поскольку магниты, наклеенные на ротор, создают постоянное магнитное поле (северный и южный полюса).
Если ток подается на обмотки U, V и W в стойке (также называемой корпусом), этот ток создает магнитное поле вокруг обмоток. Это магнитное поле и постоянное магнитное поле на роторе вызывают немедленное притяжение между северным и южным полюсами и отталкивание подобных полюсов. Это, в свою очередь, вызывает вращательное движение двигателя.
Благодаря такой конструкции двигателя частота вращающегося поля корпуса и ротора всегда остается одинаковой.Поэтому это называется частотой синхронного вращающегося поля, и поэтому двигатель называется синхронным двигателем. Напротив, частота корпуса и ротора асинхронного двигателя никогда не должна быть одинаковой. Поэтому это называется частотой асинхронного вращающегося поля, и поэтому двигатель называется асинхронным двигателем.
Анимация синхронного двигателя
На анимации показана трехфазная система обмотки. Для большей наглядности на рисунке вместо ротора показан простой постоянный магнит.Как только ток течет в обмотки, в корпусе двигателя создается вращающееся магнитное поле, как описано выше. Он также проходит через постоянные магниты ротора, вызывая крутящий момент. Ротор совершает вращательное движение и следует за вращением магнитного поля.
Крутящий момент является наибольшим, когда магнитные полюса ротора образуют прямой угол с магнитным полем корпуса. Положение ротора определяется и передается на привод. Это необходимо для формирования токов под оптимальным углом 90 градусов в обмотках корпуса.Это также позволяет изменять силу крутящего момента.
Резольверы или поворотные энкодеры используются для определения положения и одновременно служат в качестве фактического значения для регулятора положения.
Для приложений с максимальными требованиями к энергоэффективности
Baumüller предлагает синхронные двигатели с высотой оси от 100 до 200 мм с широким спектром способов охлаждения. Серводвигатель идеален для всех приложений с максимальными требованиями к энергоэффективности, например.грамм. в:
Высокопроизводительные синхронные главные приводы
Благодаря инновационной концепции водяного охлаждения с улучшенной теплопередачей, Baumüller смог улучшить номинальную мощность своих двигателей DS2. В серии DS2 Baumüller предлагает синхронные двигатели мощностью до 300 кВт. Благодаря инновационной концепции водяного охлаждения с улучшенной теплоотдачей компания Baumüller смогла повысить номинальную мощность своих двигателей DS2. В результате производители пластмассовых и формовочных машин, в частности, получают выгоду от возможности сократить дополнительное место для установки.Дополнительным преимуществом водяного охлаждения является снижение шума за счет водяной рубашки, что делает ненужными меры по шумоподавлению.
Серводвигатели Baumüller DS2 были дополнительно оптимизированы для применения в пластмассе и резине, а также в печатных, формовочных и текстильных машинах за счет увеличения скорости и повышения производительности
Если качество воды на месте недостаточно для охлаждения, Baumüller предлагает двигатели с дополнительным воздушным охлаждением. В этой версии, отвечающей, в частности, требованиям азиатского рынка, синхронные двигатели Baumüller имеют степень защиты до IP54, как и конструкция с водяным охлаждением.
СерводвигателиBaumüller DS2 были еще больше оптимизированы для применения в пластмассе и резине, а также для печатных, формовочных и текстильных машин за счет увеличения скорости и повышения производительности В дополнение к концепции охлаждения Baumüller предлагает номинальные скорости до 3000 об / мин . Что касается использования двигателей DS2 в сервонасосах, производитель из Нюрнберга проложил путь для новых разработок шестеренчатых насосов с внутренним зацеплением с повышенной скоростью. Использование комбинаций двигатель / насос с более высокой скоростью вращения позволяет уменьшить размер как насоса, так и двигателя.Это позволяет повысить как экономическую эффективность, так и, за счет меньшей инерции системы, производительность машины.
Благодаря инновациям в концепции охлаждения и увеличению скорости, поколение трехфазных синхронных двигателей Baumüller DS2 предлагает мощный, динамичный синхронный двигатель мощностью до 300 кВт, который дает пользователю повышение производительности, экономию затрат и, следовательно, большую конкурентное преимущество.
Трехфазные синхронные двигатели серии DS2
Трехфазные синхронные двигатели серииDS2 имеют очень высокую удельную мощность, очень высокий КПД и высокую динамику и поэтому идеально подходят для самых требовательных приложений в машиностроении.В настоящее время доступны двигатели типоразмеров 100, 132, 160 и 200. Прочные и компактные двигатели также практически не требуют обслуживания, что является еще одним плюсом для экономичной эксплуатации.
Ваши преимущества:
- Большой диапазон мощности
- Номинальная частота вращения до 3000 об / мин в зависимости от типоразмера
- Высокий максимальный крутящий момент для улучшения разгона
- Более короткое время цикла для повышения производительности
- Отсутствие муфт или опор насоса благодаря валу с внутренними зубьями
- Экономия места и затрат благодаря компактной конструкции
- Очень высокая удельная мощность
- Сверхдинамичные, прочные и компактные трехфазные синхронные двигатели DS2
- Низкий уровень шума
- Высокая точность крутящего момента
- Не изнашивается и не требует обслуживания
- Хорошие разгонные свойства
- Очень хорошая концентричность
- Высокая вариативность благодаря модульному принципу
- Энергоэффективность за счет высокого КПД
- Синхронные двигатели с постоянным возбуждением
- Вентилируемый IP23, IP54
- с водяным охлаждением IP54
- Энкодеры: резольвер, энкодер SinCos
- Опционально с тормозом
Более высокие скорости для оптимальной работы
DS2-132 с воздушным охлаждением Благодаря более высокой скорости двигатели DS2 оптимальны для использования в качестве привода сервонасоса в машинах для литья под давлением, резиновых и формовочных машинах, а также в качестве главного привода в печатных и текстильных машинах.Благодаря увеличенной номинальной скорости DS2 предлагает максимальный крутящий момент, доступный в широком диапазоне регулирования скорости, тем самым улучшая ускорение. Это позволяет сократить время цикла и повысить производительность машины. Увеличение производительности за счет увеличения скорости приводит к оптимальному выбору двигателя и трансмиссии и, таким образом, к повышению экономической эффективности.
Дополнительный вал с внутренними зубьями — еще одно усовершенствование серводвигателей серий DSC, DSP, DSD2 и DS2.Эта версия интерфейса не требует каких-либо других дорогостоящих элементов передачи, таких как муфты или опоры насосов. Это сокращает расходы и оптимизирует пространство для установки. Это предлагается для двигателей DS2 типоразмеров 100 и 132 в качестве опции / по запросу.
Версия интерфейса с внутренними зубьями не требует дорогостоящих передаточных элементов, таких как муфты и опоры насосов. Эта опция доступна для серводвигателей серий DS2, DSP, DSD2 и DSC и сокращает расходы при оптимизации пространства для установки
Пример применения: приводной агрегат для термопластавтоматов
Короткое время цикла, максимальная точность и энергоэффективные приводы.Что касается гибридных и аллэлектрических термопластавтоматов, мы вместе с производителем машин непосредственно определяем важные промышленные тенденции с помощью совместно разработанных концепций. Для этого мы опираемся на наш обширный опыт работы в вашем сегменте рынка.
Сократить время цикла и снизить затраты на электроэнергию
- Система промежуточного контура отдельных приводов, оптимизированная для приложений с пиковой нагрузкой
- Компактные синхронные двигатели с различными вариантами охлаждения, широким диапазоном регулирования скорости, высокой мощностью и плотностью крутящего момента
- Возможное использование параллельных функций (разблокировка инструмента и процедура дозирования)
Для повышения точности и качества продукции
- Высоко синхронное позиционирование благодаря полевой шине EtherCAT с поддержкой реального времени
- Очень короткое время цикла шины обеспечивает оптимальный контроль и толщину материала во время процесса впрыска
- Передискретизация при оценке сигнала энкодера для максимальной точности позиционирования асинхронных служебных данных и стандартных протоколов Ethernet
Повышение готовности машины
- Возможности удаленного обслуживания и диагностики благодаря полевой шине EtherCAT и туннелированию TCP / IP
- Опции целевой диагностики и анализ контура управления с помощью быстрого преобразования Фурье и функций осциллографа в реальном времени, интегрированных в программное обеспечение параметризации ProDrive
- Плавное и контролируемое падение крутящего момента после торможения до нулевой скорости предотвращает резкое ослабление предварительно затянутых винтов, тем самым предотвращая разрушение головок винтов
Технические характеристики DS2
Возможны изменения.Указанные значения являются максимальными значениями.
Подробности см. В технической документации.
Мы будем рады вам помочь
Свяжитесь с нами.
Мы будем рады ответить на ваши вопросы.
Страна* Пожалуйста selectGermanyUnited StatesUnited KingdomIndiaItalyAfghanistanAland IslandsAlbaniaAlgeriaAmerican SamoaAndorraAngolaAnguillaAntarcticaAntigua и BarbudaArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahamasBahrainBangladeshBarbadosBelarusBelgiumBelizeBeninBermudaBhutanBoliviaBonaire, Синт-Эстатиус и SabaBosnia и HerzegovinaBotswanaBouvet IslandBrazilBritish Индийский океан TerritoryBruneiBulgariaBurkina FasoBurundiCambodiaCameroonCanadaCape VerdeCayman IslandsCentral африканских RepublicChadChileChinaChristmas IslandCocos (Килинг) IslandsColombiaComorosCongoCook IslandsCosta RicaCote д’Ивуар (Берег Слоновой Кости) CroatiaCubaCuracaoCyprusCzech RepublicDemocratic Республика из CongoDenmarkDjiboutiDominicaDominican RepublicEcuadorEgyptEl SalvadorEquatorial GuineaEritreaEstoniaEthiopiaFalkland острова (Мальвинские ) Фарерские острова, Фиджи, Финляндия, Франция, Французская Гвиана, Французская Полинезия, Французские Южные территории, Габон, Гамбия, Грузия, Германия, Гана, Гибралтар, Греция, Гренландия, Гренада, Гуадалуп, Гуам, Гватемала, Гернси, Гуи. neaGuinea-BissauGuyanaHaitiHeard остров и McDonald IslandsHondurasHong KongHungaryIcelandIndiaIndonesiaIranIraqIrelandIsle из ManIsraelItalyJamaicaJapanJerseyJordanKazakhstanKenyaKiribatiKosovoKuwaitKyrgyzstanLaosLatviaLebanonLesothoLiberiaLibyaLiechtensteinLithuaniaLuxembourgMacaoMacedoniaMadagascarMalawiMalaysiaMaldivesMaliMaltaMarshall IslandsMartiniqueMauritaniaMauritiusMayotteMexicoMicronesiaMoldavaMonacoMongoliaMontenegroMontserratMoroccoMozambiqueMyanmar (Бирма) NamibiaNauruNepalNetherlandsNew CaledoniaNew ZealandNicaraguaNigerNigeriaNiueNorfolk IslandNorth KoreaNorthern Mariana IslandsNorwayOmanPakistanPalauPalestinePanamaPapua Новый GuineaParaguayPeruPhillipinesPitcairnPolandPortugalPuerto RicoQatarReunionRomaniaRussiaRwandaSaint BarthelemySaint HelenaSaint Киттс и NevisSaint LuciaSaint MartinSaint Пьер и MiquelonSaint Винсент и GrenadinesSamoaSan MarinoSao Томе и PrincipeSaudi ArabiaSenegalSerbiaSeychellesSierra LeoneSingaporeSint MaartenSlovakiaSloveniaSolomon I slandsSomaliaSouth AfricaSouth Джорджия и Южные Сандвичевы IslandsSouth KoreaSouth SudanSpainSri LankaSudanSurinameSvalbard и Ян MayenSwazilandSwedenSwitzerlandSyriaTaiwanTajikistanTanzaniaThailandTimor-Лешть (Восточный Тимор) TogoTokelauTongaTrinidad и TobagoTunisiaTurkeyTurkmenistanTurks и Кайкос IslandsTuvaluUgandaUkraineUnited Арабского EmiratesUnited KingdomUnited StatesUruguayUzbekistanVanuatuVatican CityVenezuelaVietnamVirgin остров, BritishVirgin остров, USWallis и FutunaWestern SaharaYemenZambiaZimbabwe
Найти контакт
Синхронные двигатели и генераторы — промышленность сегодня%
Назначение и применение синхронных двигателей.
В настоящее время доступен большой набор синхронных двигателей и генераторов для широкого спектра промышленных применений. Электродвигатели стали неотъемлемой частью промышленного производства. Они преобразуют электрическую энергию в механическую, позволяя промышленным машинам выполнять возложенные на них задачи. Не все электродвигатели выполняют одинаковый набор задач, но некоторые из них специально разработаны для конкретной отрасли.
Применения в промышленности
Помимо множества различных функций, обеспечиваемых тщательно спроектированными двигателями, задачи, выполняемые в отрасли, возможно, являются наиболее сложными.Некоторые электродвигатели используются при добыче угля, а некоторые обеспечивают энергию для дробления и измельчения в цементной промышленности. С другой стороны, для сталелитейных заводов требуется стабильная подача для обеспечения непрерывности производственного процесса в чрезвычайно теплой атмосфере. По этой причине часто используют специальные двигатели для конвейерных лент. В сахарной промышленности используются индивидуальные высоковольтные двигатели или двигатели IE4 super premium, поскольку они могут обеспечивать более высокое напряжение, не требуя большого количества электроэнергии.
Применения в производственных машинах
Электродвигатели используются не только для питания полей и оборудования, но и для привода целого ряда производственных машин. Двигатели внизу — это те, которые приводят в движение воздушный винт, включают турбину или всасывают дым и мусор в людных общественных или частных местах. На гидротехнических сооружениях именно электродвигатели помогают накачивать воду. Кроме того, в компрессорах используются современные трехфазные электродвигатели, поскольку они могут достаточно охладиться и, таким образом, выдерживать более высокие температуры.Эти преимущества также делают их идеальным выбором для промышленных котлов.
В электрических системах, которые мы используем в промышленности, на электростанциях или в частных домах, двигатели и генераторы стали повседневным устройством. В связи со спросом на системы с высокой энергоэффективностью и низким энергопотреблением можно наблюдать изобретение новых моделей этих электрических устройств. Основным расчетным фактором надежной работы двигателей и генераторов является коэффициент мощности.Это отношение приложенной мощности к требуемой мощности. Обычно общая мощность, потребляемая на предприятиях и на предприятиях, рассчитывается на основе коэффициента мощности. Поэтому коэффициент мощности всегда должен поддерживаться на постоянном уровне. Однако из-за увеличения реактивной мощности в этих устройствах коэффициент мощности уменьшается. Введено множество методов для поддержания постоянного значения коэффициента мощности. Концепция синхронного двигателя — одна из них.
Синхронный двигатель: что это такое?
Синхронный двигатель определяется так: двигатель переменного тока, в котором в неподвижном состоянии вращение вала синхронно с частотой приложенного тока.
Синхронный двигатель не работает с индукционным током. В отличие от асинхронных двигателей, эти двигатели имеют многофазные магниты переменного тока на статоре, которые создают вращающееся магнитное поле. В этом случае ротор имеет постоянный магнит, который синхронизирован с вращающимся магнитным полем и вращается синхронно с частотой подаваемого тока.
Функциональность синхронного двигателя
Работа синхронных двигателей основана на взаимодействии магнитного поля статора в сочетании с магнитным полем ротора.Трехфазные обмотки включены в статор и работают от трехфазного тока. Таким образом, обмотка статора создает трехфазное вращающееся магнитное поле. На ротор подается постоянный ток.
Если нагрузка больше, чем нагрузка пробоя, двигатель десинхронизируется. Преимущество трехфазной обмотки статора состоит в том, что она определяет направление вращения. При однофазной обмотке нет необходимости определять направление вращения, и двигатель может запускаться в обоих направлениях.Пусковые устройства необходимы для управления направлением вращения в этих синхронных двигателях.
Области применения синхронных двигателей
Синхронные двигатели обычно используются в приложениях, в которых требуется постоянная и точная скорость. Типичное применение этих маломощных двигателей — позиционирующие машины. Они также используются в приводах роботов. Синхронные двигатели также используются в шаровых мельницах, часах, проигрывателях и вертушках. Они также используются в качестве серводвигателей и синхронизаторов.
Такие двигатели доступны в диапазоне от подковообразных до промышленных с высокими рабочими характеристиками. Хотя они используются в промышленных типоразмерах с высокими рабочими характеристиками, эти двигатели могут выполнять две основные функции. Один — как эффективное средство преобразования энергии переменного тока в механическую энергию, а другой — как коррекция коэффициента мощности.
.